Hi Mr Tayyebi. It's wonderful work and it is really helpful. But I may encounter two issues when reproducing the case study results of the loss of SM and No-Inertia Systems with all GFCs (Section IV. F in the paper).
-
The simulations always get stuck at the moment of SM loss, whether it is droop control, VSM, or matching control. Say that when I set T_loss=25, the Simulink always get stuck at T=25.005 or 25.007, and won't move on.


-
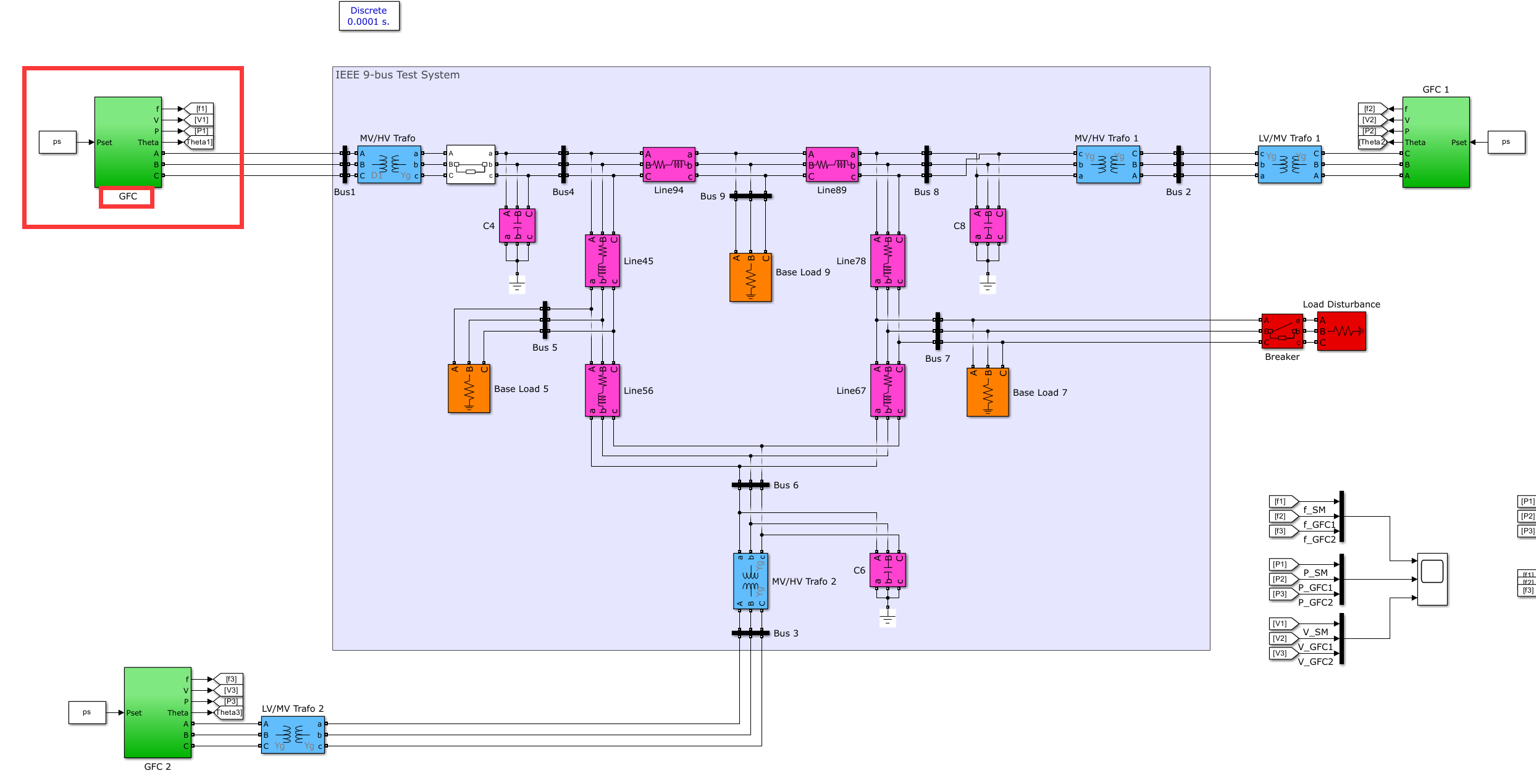
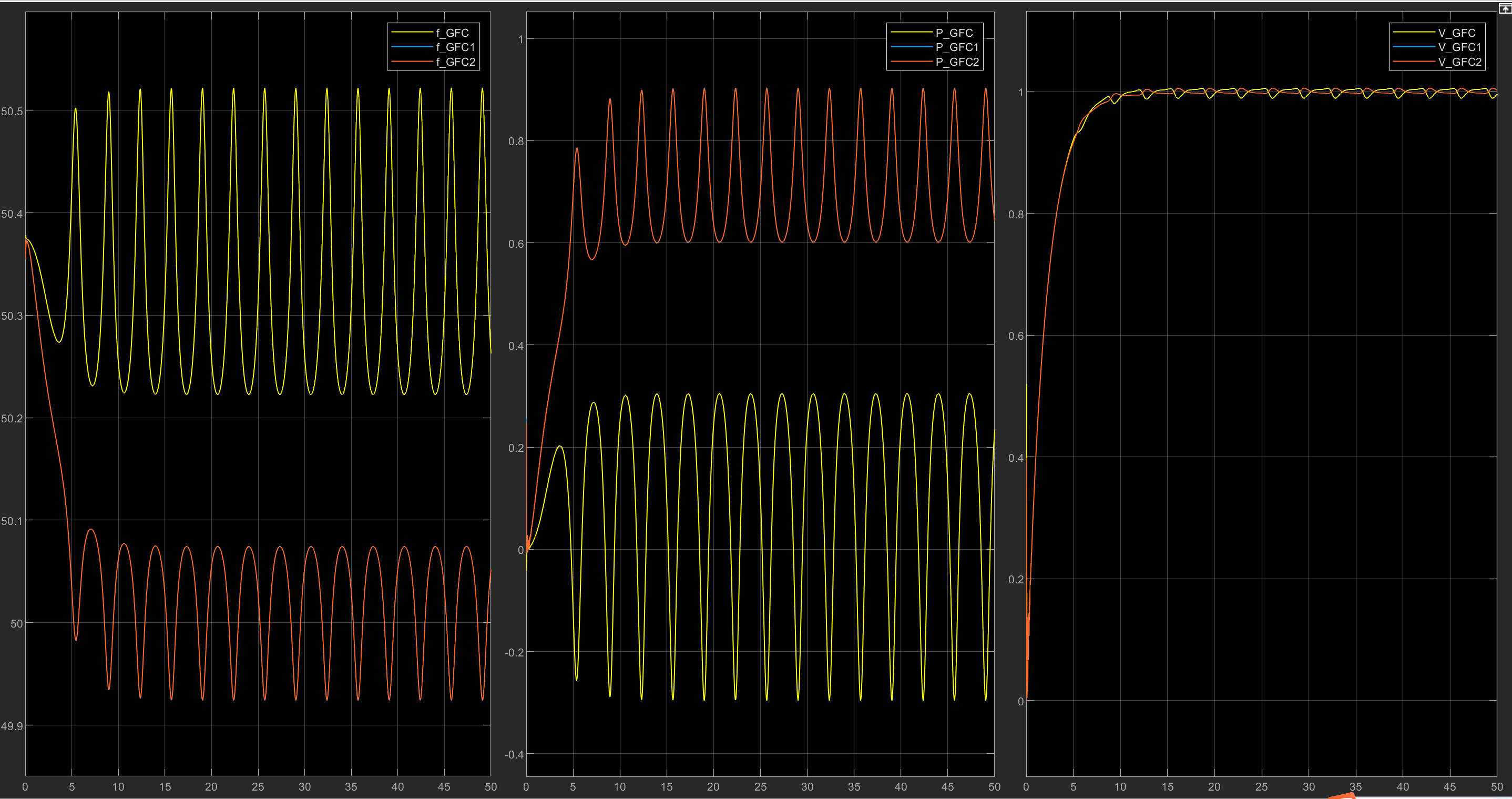
To reproduce the results of No-Inertia Systems, I replaced the SM at node 1 with a duplicate of GFC model at node 2 or 3. But the time-domain results (P and f) are always oscillating with constant amplitude even without disturbance.
I am wondering whether there is something wrong with my settings or not and how to fix it? Thank you!
Hi Mr Tayyebi. It's wonderful work and it is really helpful. But I may encounter two issues when reproducing the case study results of the loss of SM and No-Inertia Systems with all GFCs (Section IV. F in the paper).
The simulations always get stuck at the moment of SM loss, whether it is droop control, VSM, or matching control. Say that when I set T_loss=25, the Simulink always get stuck at T=25.005 or 25.007, and won't move on.


To reproduce the results of No-Inertia Systems, I replaced the SM at node 1 with a duplicate of GFC model at node 2 or 3. But the time-domain results (P and f) are always oscillating with constant amplitude even without disturbance.


I am wondering whether there is something wrong with my settings or not and how to fix it? Thank you!