diff --git a/.github/ISSUE_TEMPLATE/bug_report.md b/.github/ISSUE_TEMPLATE/bug_report.md
new file mode 100644
index 000000000..dd84ea782
--- /dev/null
+++ b/.github/ISSUE_TEMPLATE/bug_report.md
@@ -0,0 +1,38 @@
+---
+name: Bug report
+about: Create a report to help us improve
+title: ''
+labels: ''
+assignees: ''
+
+---
+
+**Describe the bug**
+A clear and concise description of what the bug is.
+
+**To Reproduce**
+Steps to reproduce the behavior:
+1. Go to '...'
+2. Click on '....'
+3. Scroll down to '....'
+4. See error
+
+**Expected behavior**
+A clear and concise description of what you expected to happen.
+
+**Screenshots**
+If applicable, add screenshots to help explain your problem.
+
+**Desktop (please complete the following information):**
+ - OS: [e.g. iOS]
+ - Browser [e.g. chrome, safari]
+ - Version [e.g. 22]
+
+**Smartphone (please complete the following information):**
+ - Device: [e.g. iPhone6]
+ - OS: [e.g. iOS8.1]
+ - Browser [e.g. stock browser, safari]
+ - Version [e.g. 22]
+
+**Additional context**
+Add any other context about the problem here.
diff --git a/.github/ISSUE_TEMPLATE/custom.md b/.github/ISSUE_TEMPLATE/custom.md
new file mode 100644
index 000000000..b894315f4
--- /dev/null
+++ b/.github/ISSUE_TEMPLATE/custom.md
@@ -0,0 +1,8 @@
+---
+name: Custom issue template
+about: Describe this issue template's purpose here.
+title: ''
+labels: ''
+assignees: ''
+
+---
diff --git a/.github/ISSUE_TEMPLATE/feature_request.md b/.github/ISSUE_TEMPLATE/feature_request.md
new file mode 100644
index 000000000..bbcbbe7d6
--- /dev/null
+++ b/.github/ISSUE_TEMPLATE/feature_request.md
@@ -0,0 +1,20 @@
+---
+name: Feature request
+about: Suggest an idea for this project
+title: ''
+labels: ''
+assignees: ''
+
+---
+
+**Is your feature request related to a problem? Please describe.**
+A clear and concise description of what the problem is. Ex. I'm always frustrated when [...]
+
+**Describe the solution you'd like**
+A clear and concise description of what you want to happen.
+
+**Describe alternatives you've considered**
+A clear and concise description of any alternative solutions or features you've considered.
+
+**Additional context**
+Add any other context or screenshots about the feature request here.
diff --git a/.github/pull_request_template.md b/.github/pull_request_template.md
new file mode 100644
index 000000000..557ee035d
--- /dev/null
+++ b/.github/pull_request_template.md
@@ -0,0 +1,44 @@
+# Pull Request Description
+
+# Jira Ticket Link
+
+## Description
+
+Please include a summary of the change and which issue is fixed. Please also include relevant motivation and context. List any dependencies that are required for this change.
+
+Fixes # (issue)
+
+## Type of change
+
+Please delete options that are not relevant.
+
+- [ ] Bug fix (non-breaking change which fixes an issue)
+- [ ] New feature (non-breaking change which adds functionality)
+- [ ] Breaking change (fix or feature that would cause existing functionality to not work as expected)
+- [ ] This change requires a documentation update
+
+## How Has This Been Tested?
+
+Please describe the tests that you ran to verify your changes. Provide instructions so we can reproduce. Please also list any relevant details for your test configuration
+
+- [ ] Test A
+- [ ] Test B
+
+**Test Configuration**:
+* Firmware version:
+* Hardware:
+* Toolchain:
+* SDK:
+* API:
+
+## Checklist:
+
+- [ ] My code follows the style guidelines of this project
+- [ ] I have performed a self-review of my own code
+- [ ] I have commented my code, particularly in hard-to-understand areas
+- [ ] I have made corresponding changes to the documentation
+- [ ] My changes generate no new warnings
+- [ ] I have added tests that prove my fix is effective or that my feature works
+- [ ] New and existing unit tests pass locally with my changes
+- [ ] Any dependent changes have been merged and published in downstream modules
+- [ ] I have checked my code and corrected any misspellings
diff --git a/.github/workflows/python-app.yml b/.github/workflows/python-app.yml
new file mode 100644
index 000000000..77d88ee40
--- /dev/null
+++ b/.github/workflows/python-app.yml
@@ -0,0 +1,31 @@
+# This workflow will install Python dependencies, run tests and lint with a single version of Python
+# For more information see: https://docs.github.com/en/actions/automating-builds-and-tests/building-and-testing-python
+
+name: Python application
+
+on:
+ push:
+ branches: [ "main" ]
+ pull_request:
+ branches: [ "main" ]
+
+permissions:
+ contents: read
+
+jobs:
+ build:
+
+ runs-on: ubuntu-latest
+
+ steps:
+ - uses: actions/checkout@v3
+ - name: Set up Python 3.10
+ uses: actions/setup-python@v3
+ with:
+ python-version: "3.10"
+ - name: Install dependencies
+ run: |
+ cd oneAPI_ODAV_APP
+ python -m pip install --upgrade pip
+ pip install -r requirements.txt
+ pip install -r requirements_gpu.txt
\ No newline at end of file
diff --git a/.gitignore b/.gitignore
new file mode 100644
index 000000000..b2e412853
--- /dev/null
+++ b/.gitignore
@@ -0,0 +1,265 @@
+/oneAPI_ODAV_APP/Model/yolov7.pt
+/oneAPI_ODAV_APP/Model/yolov7-e6e.pt
+
+*.jpg
+*.jpeg
+*.png
+*.bmp
+*.tif
+*.tiff
+*.heic
+*.JPG
+*.JPEG
+*.PNG
+*.BMP
+*.TIF
+*.TIFF
+*.HEIC
+*.mp4
+*.mov
+*.MOV
+*.avi
+*.data
+*.json
+*.cfg
+!setup.cfg
+!cfg/yolov3*.cfg
+
+storage.googleapis.com
+runs/*
+data/*
+data/images/*
+!data/*.yaml
+!data/hyps
+!data/scripts
+!data/images
+!data/images/zidane.jpg
+!data/images/bus.jpg
+!data/*.sh
+
+results*.csv
+
+# Datasets -------------------------------------------------------------------------------------------------------------
+coco/
+coco128/
+VOC/
+
+coco2017labels-segments.zip
+test2017.zip
+train2017.zip
+val2017.zip
+
+# MATLAB GitIgnore -----------------------------------------------------------------------------------------------------
+*.m~
+*.mat
+!targets*.mat
+
+# Neural Network weights -----------------------------------------------------------------------------------------------
+*.weights
+*.pt
+*.pb
+*.onnx
+*.engine
+*.mlmodel
+*.torchscript
+*.tflite
+*.h5
+*_saved_model/
+*_web_model/
+*_openvino_model/
+darknet53.conv.74
+yolov3-tiny.conv.15
+*.ptl
+*.trt
+
+# GitHub Python GitIgnore ----------------------------------------------------------------------------------------------
+# Byte-compiled / optimized / DLL files
+__pycache__/
+*.py[cod]
+*$py.class
+
+# C extensions
+*.so
+
+# Distribution / packaging
+.Python
+env/
+build/
+develop-eggs/
+dist/
+downloads/
+eggs/
+.eggs/
+lib/
+lib64/
+parts/
+sdist/
+var/
+wheels/
+*.egg-info/
+/wandb/
+.installed.cfg
+*.egg
+events.out.tfevents.*
+
+# PyInstaller
+# Usually these files are written by a python script from a template
+# before PyInstaller builds the exe, so as to inject date/other infos into it.
+*.manifest
+*.spec
+
+# Installer logs
+pip-log.txt
+pip-delete-this-directory.txt
+
+# Unit test / coverage reports
+htmlcov/
+.tox/
+.coverage
+.coverage.*
+.cache
+nosetests.xml
+coverage.xml
+*.cover
+.hypothesis/
+
+# Translations
+*.mo
+*.pot
+
+# Django stuff:
+*.log
+local_settings.py
+
+# Flask stuff:
+instance/
+.webassets-cache
+
+# Scrapy stuff:
+.scrapy
+
+# Sphinx documentation
+docs/_build/
+
+# PyBuilder
+target/
+
+# Jupyter Notebook
+.ipynb_checkpoints
+
+# pyenv
+.python-version
+
+# celery beat schedule file
+celerybeat-schedule
+
+# SageMath parsed files
+*.sage.py
+
+# dotenv
+.env
+
+# virtualenv
+.venv*
+venv*/
+ENV*/
+
+# Spyder project settings
+.spyderproject
+.spyproject
+
+# Rope project settings
+.ropeproject
+
+# mkdocs documentation
+/site
+
+# mypy
+.mypy_cache/
+
+
+# https://github.com/github/gitignore/blob/master/Global/macOS.gitignore -----------------------------------------------
+
+# General
+.DS_Store
+.AppleDouble
+.LSOverride
+
+# Icon must end with two \r
+Icon
+Icon?
+
+# Thumbnails
+._*
+
+# Files that might appear in the root of a volume
+.DocumentRevisions-V100
+.fseventsd
+.Spotlight-V100
+.TemporaryItems
+.Trashes
+.VolumeIcon.icns
+.com.apple.timemachine.donotpresent
+
+# Directories potentially created on remote AFP share
+.AppleDB
+.AppleDesktop
+Network Trash Folder
+Temporary Items
+.apdisk
+
+
+# https://github.com/github/gitignore/blob/master/Global/JetBrains.gitignore
+# Covers JetBrains IDEs: IntelliJ, RubyMine, PhpStorm, AppCode, PyCharm, CLion, Android Studio and WebStorm
+# Reference: https://intellij-support.jetbrains.com/hc/en-us/articles/206544839
+
+# User-specific stuff:
+.idea/*
+.idea/**/workspace.xml
+.idea/**/tasks.xml
+.idea/dictionaries
+.html # Bokeh Plots
+.pg # TensorFlow Frozen Graphs
+.avi # videos
+
+# Sensitive or high-churn files:
+.idea/**/dataSources/
+.idea/**/dataSources.ids
+.idea/**/dataSources.local.xml
+.idea/**/sqlDataSources.xml
+.idea/**/dynamic.xml
+.idea/**/uiDesigner.xml
+
+# Gradle:
+.idea/**/gradle.xml
+.idea/**/libraries
+
+# CMake
+cmake-build-debug/
+cmake-build-release/
+
+# Mongo Explorer plugin:
+.idea/**/mongoSettings.xml
+
+## File-based project format:
+*.iws
+
+## Plugin-specific files:
+
+# IntelliJ
+out/
+
+# mpeltonen/sbt-idea plugin
+.idea_modules/
+
+# JIRA plugin
+atlassian-ide-plugin.xml
+
+# Cursive Clojure plugin
+.idea/replstate.xml
+
+# Crashlytics plugin (for Android Studio and IntelliJ)
+com_crashlytics_export_strings.xml
+crashlytics.properties
+crashlytics-build.properties
+fabric.properties
diff --git a/Data/Screenshots/01.png b/Data/Screenshots/01.png
new file mode 100644
index 000000000..5aab1b9d5
Binary files /dev/null and b/Data/Screenshots/01.png differ
diff --git a/Data/Screenshots/02.png b/Data/Screenshots/02.png
new file mode 100644
index 000000000..fed44b196
Binary files /dev/null and b/Data/Screenshots/02.png differ
diff --git a/Data/Screenshots/03.png b/Data/Screenshots/03.png
new file mode 100644
index 000000000..8e8486fde
Binary files /dev/null and b/Data/Screenshots/03.png differ
diff --git a/Data/Screenshots/04.png b/Data/Screenshots/04.png
new file mode 100644
index 000000000..91cfc9192
Binary files /dev/null and b/Data/Screenshots/04.png differ
diff --git a/Data/demo.gif b/Data/demo.gif
new file mode 100644
index 000000000..36e2adf38
Binary files /dev/null and b/Data/demo.gif differ
diff --git a/Data/demo_seg.gif b/Data/demo_seg.gif
new file mode 100644
index 000000000..9e018ff69
Binary files /dev/null and b/Data/demo_seg.gif differ
diff --git a/Data/hack2skill Intel OneAPI Hackathon.docx b/Data/hack2skill Intel OneAPI Hackathon.docx
new file mode 100644
index 000000000..285cb3cd8
Binary files /dev/null and b/Data/hack2skill Intel OneAPI Hackathon.docx differ
diff --git a/Data/oneAPI ODAV.drawio b/Data/oneAPI ODAV.drawio
new file mode 100644
index 000000000..8a4036e48
--- /dev/null
+++ b/Data/oneAPI ODAV.drawio
@@ -0,0 +1,232 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/Data/oneAPI_ODAV Hack2skill Final INTEL oneAPI Hackathon PPT.pdf b/Data/oneAPI_ODAV Hack2skill Final INTEL oneAPI Hackathon PPT.pdf
new file mode 100644
index 000000000..cc34a39d7
Binary files /dev/null and b/Data/oneAPI_ODAV Hack2skill Final INTEL oneAPI Hackathon PPT.pdf differ
diff --git a/Data/oneAPI_ODAV Hack2skill Final INTEL oneAPI Hackathon PPT.pptx b/Data/oneAPI_ODAV Hack2skill Final INTEL oneAPI Hackathon PPT.pptx
new file mode 100644
index 000000000..b8c8a024c
Binary files /dev/null and b/Data/oneAPI_ODAV Hack2skill Final INTEL oneAPI Hackathon PPT.pptx differ
diff --git a/Data/oneAPI_ODAV.png b/Data/oneAPI_ODAV.png
new file mode 100644
index 000000000..b14444a48
Binary files /dev/null and b/Data/oneAPI_ODAV.png differ
diff --git a/Data/pytorchvsipex.png b/Data/pytorchvsipex.png
new file mode 100644
index 000000000..8d3f17830
Binary files /dev/null and b/Data/pytorchvsipex.png differ
diff --git a/LICENSE b/LICENSE
new file mode 100644
index 000000000..8ba114299
--- /dev/null
+++ b/LICENSE
@@ -0,0 +1,21 @@
+MIT License
+
+Copyright (c) 2023 Intelegix Labs
+
+Permission is hereby granted, free of charge, to any person obtaining a copy
+of this software and associated documentation files (the "Software"), to deal
+in the Software without restriction, including without limitation the rights
+to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
+copies of the Software, and to permit persons to whom the Software is
+furnished to do so, subject to the following conditions:
+
+The above copyright notice and this permission notice shall be included in all
+copies or substantial portions of the Software.
+
+THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
+IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
+FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
+AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
+LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
+OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
+SOFTWARE.
diff --git a/README.md b/README.md
index 81463bfd7..856786046 100644
--- a/README.md
+++ b/README.md
@@ -1,17 +1,170 @@
-# intel-oneAPI
+oneAPI ODAV
-#### Team Name -
-#### Problem Statement -
-#### Team Leader Email -
+#### Team Name - Hitaya
+#### Problem Statement - Object Detection For Autonomous Vehicles (DEMO)
+#### Team Leader Email - manijb13@gmail.com
## A Brief of the Prototype:
- This section must include UML Daigrms and prototype description
+ This section includes UML Daigrms and prototype description
+ - OneAI_ODAV PPT here.
+
+
+  +
+
+
+
+  +
+  +
+
## Tech Stack:
List Down all technologies used to Build the prototype **Clearly mentioning Intel® AI Analytics Toolkits, it's libraries and the SYCL/DCP++ Libraries used**
+ - Intel® AI Analytics Toolkits
+ - Intel Distribution for Python
## Step-by-Step Code Execution Instructions:
- This Section must contain set of instructions required to clone and run the prototype, so that it can be tested and deeply analysed
+ This Section must contain set of instructions required to clone and run the prototype, so that it can be tested and deeply analysed
+ - Kindly scroll down and head over to the Project Architecture section were we've explained in detail steps to run
## What I Learned:
Write about the biggest learning you had while developing the prototype
+ - We've been able to custom label/annotate the objects in detection.
+ - Came up with novel algorithms for different kinds of object detection specific to autonomous cars.
+ - Using Intel® AI Analytics Toolkits we were able to enhance performance speed in training data.
+ - Our applications works under all kinds of weather conditions and provides proper analysis over the data.
+
+  +
+
+
+
+## Features
+- Car Dashboard Application, to detect objects after detection from, the yolov7 model.
+- We have used Tiny Yolov7 Model Architecture to ensure, the car dashcam requires very less, hardware configuration to run the application.
+- Custom Labelling tool, to self Label the Application.
+- Sending of data points once connected to the internet, like userid, detected_image, label, bounding_box_co-ordinate, latitude, and longitude through rest API.
+- Rest API saves the real-time data, in the database, and sends the data to Admin Web Interface.
+- Auto Train the custom-yolov7 model, with new data points every week, and update the car dashboard Application over the internet, to improve the accuracy of the model over time.
+
+- Install Python 3.10 and its required Packages like PyTorch etc.
+
+## 2. Train the YoloV7 Object Detection Model
+
+#### Open Image Labelling Tool
+
+```commandline
+labelImg
+```
+
+#### Add more data from the already labelled images
+
+```
+git clone https://github.com/IntelegixLabs/smartathon-dataset
+cd smartathon-dataset
+Add train,val, and test data to oneAPI_ODAV/yolov7-custom/data files
+```
+
+#### Train the custom Yolov7 Model
+
+```commandline
+git clone https://github.com/IntelegixLabs/oneAPI_ODAV
+cd oneAPI_ODAV
+cd yolov7-custom
+pip install -r requirements.txt
+pip install -r requirements_gpu.txt
+pip3 install torch torchvision torchaudio --extra-index-url https://download.pytorch.org/whl/cu117
+python train.py --workers 1 --device 0 --batch-size 8 --epochs 100 --img 640 640 --data data/custom_data.yaml --hyp data/hyp.scratch.custom.yaml --cfg cfg/training/yolov7-custom.yaml --name yolov7-custom --weights yolov7.pt
+
+```
+## 3. Getting Started With Car Dash Board Application
+
+- Clone the repo and cd into the directory
+```sh
+$ git clone https://github.com/IntelegixLabs/oneAPI_ODAV.git
+$ cd oneAPI_ODAV
+$ cd oneAPI_ODAV_App
+```
+- Download the Trained Models and Test_Video Folder from google Drive link given below and extract it inside oneAPI_ODAV_App Folder
+- https://drive.google.com/file/d/1EZAifBEQU9q8AgOkVzM_IqtC3tjQJrXA/view?usp=sharing
+
+```sh
+$ wget https://drive.google.com/file/d/1YXf8kMjowu28J5Z_ZPXoRIDABRKzmHis/view?usp=sharing
+```
+
+- Install Python 3.10 and its required Packages like PyTorch etc.
+
+```sh
+$ pip install -r requirements.txt
+$ pip intsall -r requirements_gpu.txt
+$ pip3 install torch torchvision torchaudio --extra-index-url https://download.pytorch.org/whl/cu117
+```
+
+- Run the app
+
+```sh
+$ python home.py
+```
+
+
+#### Packaging the Application for Creating a Execulatle exe File that can run in Windows,Linus,or Mac OS
+
+You can pass any valid `pyinstaller` flag in the following command to further customize the way your app is built.
+for reference read the pyinstaller documentation here.
+
+```sh
+$ pyinstaller -i "favicon.ico" --onefile -w --hiddenimport=EasyTkinter --hiddenimport=Pillow --hiddenimport=opencv-python --hiddenimport=requests--hiddenimport=Configparser --hiddenimport=PyAutoGUI --hiddenimport=numpy --hiddenimport=pandas --hiddenimport=urllib3 --hiddenimport=tensorflow --hiddenimport=scikit-learn --hiddenimport=wget --hiddenimport=pygame --hiddenimport=dlib --hiddenimport=imutils --hiddenimport=deepface --hiddenimport=keras --hiddenimport=cvlib --name oneAPI_ODAV home.py
+```
+
+
+## 4. Working Samples
+
+- For Video Demostration refer to the YouTube link here.
+
+#### GUI INTERFACE SAMPLES
+
+
+  +
+  +
+
+
+#### THEME 1 (Detection and evaluation of the following elements on street imagery taken from a moving vehicle) :camera_flash:
+
+
+
+Object types:
+
+```
+ ● PERSON
+ ● BICYCLE
+ ● CAR
+ ● MOTORCYCLE
+ ● BUS
+ ● TRUCK
+ ● TRAFFIC LIGHT
+ ● STOP SIGN
+ ● PARKING METER
+ ● POTTED PLANT
+ ● CLOCK
+```
+
+
+  +
+
+
+
+#### Car Dashboard Custom Image Labelling Tool
+
+
+
+  +
+
+
+## 5. Running yolov7-Segmentation Model
+
+```sh
+$ cd oneAPI_ODAV
+$ cd seg/segment
+$ python predict.py
+```
+
+
+
diff --git a/ipex/cfg/training/yolov7-custom.yaml b/ipex/cfg/training/yolov7-custom.yaml
new file mode 100644
index 000000000..60a2e9eef
--- /dev/null
+++ b/ipex/cfg/training/yolov7-custom.yaml
@@ -0,0 +1,140 @@
+# parameters
+nc: 1 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+
+# anchors
+anchors:
+ - [12,16, 19,36, 40,28] # P3/8
+ - [36,75, 76,55, 72,146] # P4/16
+ - [142,110, 192,243, 459,401] # P5/32
+
+# yolov7 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Conv, [64, 3, 1]],
+
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 1, Conv, [64, 1, 1]],
+ [-2, 1, Conv, [64, 1, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 11
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [128, 1, 1]],
+ [-3, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 16-P3/8
+ [-1, 1, Conv, [128, 1, 1]],
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [512, 1, 1]], # 24
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-3, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 29-P4/16
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [1024, 1, 1]], # 37
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-3, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [512, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 42-P5/32
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [1024, 1, 1]], # 50
+ ]
+
+# yolov7 head
+head:
+ [[-1, 1, SPPCSPC, [512]], # 51
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [37, 1, Conv, [256, 1, 1]], # route backbone P4
+ [[-1, -2], 1, Concat, [1]],
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 63
+
+ [-1, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [24, 1, Conv, [128, 1, 1]], # route backbone P3
+ [[-1, -2], 1, Concat, [1]],
+
+ [-1, 1, Conv, [128, 1, 1]],
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [128, 1, 1]], # 75
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [128, 1, 1]],
+ [-3, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 2]],
+ [[-1, -3, 63], 1, Concat, [1]],
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 88
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-3, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 2]],
+ [[-1, -3, 51], 1, Concat, [1]],
+
+ [-1, 1, Conv, [512, 1, 1]],
+ [-2, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [512, 1, 1]], # 101
+
+ [75, 1, RepConv, [256, 3, 1]],
+ [88, 1, RepConv, [512, 3, 1]],
+ [101, 1, RepConv, [1024, 3, 1]],
+
+ [[102,103,104], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)
+ ]
diff --git a/ipex/data/custom_data.yaml b/ipex/data/custom_data.yaml
new file mode 100644
index 000000000..4a4d17740
--- /dev/null
+++ b/ipex/data/custom_data.yaml
@@ -0,0 +1,17 @@
+
+
+
+# train and val data as 1) directory: path/images/, 2) file: path/images.txt, or 3) list: [path1/images/, path2/images/]
+train: ./data/train
+val: ./data/val
+test: ./data/test #
+
+# number of classes
+nc: 1
+
+# class names
+# names: [ 'GRAFFITI', 'FADED SIGNAGE', 'POTHOLES', 'GARBAGE', 'CONSTRUCTION ROAD', 'BROKEN SIGNAGE', 'BAD STREETLIGHT',
+# 'BAD BILLBOARD', 'SAND ON ROAD', 'CLUTTER SIDEWALK', 'UNKEPT FACADE' ]
+
+
+names: [ 'POTHOLES' ]
diff --git a/ipex/data/hyp.scratch.custom.yaml b/ipex/data/hyp.scratch.custom.yaml
new file mode 100644
index 000000000..8570d7301
--- /dev/null
+++ b/ipex/data/hyp.scratch.custom.yaml
@@ -0,0 +1,31 @@
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.3 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 0.7 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.2 # image translation (+/- fraction)
+scale: 0.5 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.0 # image mixup (probability)
+copy_paste: 0.0 # image copy paste (probability)
+paste_in: 0.0 # image copy paste (probability), use 0 for faster training
+loss_ota: 1 # use ComputeLossOTA, use 0 for faster training
\ No newline at end of file
diff --git a/ipex/deploy/triton-inference-server/README.md b/ipex/deploy/triton-inference-server/README.md
new file mode 100644
index 000000000..13af4daa9
--- /dev/null
+++ b/ipex/deploy/triton-inference-server/README.md
@@ -0,0 +1,164 @@
+# YOLOv7 on Triton Inference Server
+
+Instructions to deploy YOLOv7 as TensorRT engine to [Triton Inference Server](https://github.com/NVIDIA/triton-inference-server).
+
+Triton Inference Server takes care of model deployment with many out-of-the-box benefits, like a GRPC and HTTP interface, automatic scheduling on multiple GPUs, shared memory (even on GPU), dynamic server-side batching, health metrics and memory resource management.
+
+There are no additional dependencies needed to run this deployment, except a working docker daemon with GPU support.
+
+## Export TensorRT
+
+See https://github.com/WongKinYiu/yolov7#export for more info.
+
+```bash
+#install onnx-simplifier not listed in general yolov7 requirements.txt
+pip3 install onnx-simplifier
+
+# Pytorch Yolov7 -> ONNX with grid, EfficientNMS plugin and dynamic batch size
+python export.py --weights ./yolov7.pt --grid --end2end --dynamic-batch --simplify --topk-all 100 --iou-thres 0.65 --conf-thres 0.35 --img-size 640 640
+# ONNX -> TensorRT with trtexec and docker
+docker run -it --rm --gpus=all nvcr.io/nvidia/tensorrt:22.06-py3
+# Copy onnx -> container: docker cp yolov7.onnx :/workspace/
+# Export with FP16 precision, min batch 1, opt batch 8 and max batch 8
+./tensorrt/bin/trtexec --onnx=yolov7.onnx --minShapes=images:1x3x640x640 --optShapes=images:8x3x640x640 --maxShapes=images:8x3x640x640 --fp16 --workspace=4096 --saveEngine=yolov7-fp16-1x8x8.engine --timingCacheFile=timing.cache
+# Test engine
+./tensorrt/bin/trtexec --loadEngine=yolov7-fp16-1x8x8.engine
+# Copy engine -> host: docker cp :/workspace/yolov7-fp16-1x8x8.engine .
+```
+
+Example output of test with RTX 3090.
+
+```
+[I] === Performance summary ===
+[I] Throughput: 73.4985 qps
+[I] Latency: min = 14.8578 ms, max = 15.8344 ms, mean = 15.07 ms, median = 15.0422 ms, percentile(99%) = 15.7443 ms
+[I] End-to-End Host Latency: min = 25.8715 ms, max = 28.4102 ms, mean = 26.672 ms, median = 26.6082 ms, percentile(99%) = 27.8314 ms
+[I] Enqueue Time: min = 0.793701 ms, max = 1.47144 ms, mean = 1.2008 ms, median = 1.28644 ms, percentile(99%) = 1.38965 ms
+[I] H2D Latency: min = 1.50073 ms, max = 1.52454 ms, mean = 1.51225 ms, median = 1.51404 ms, percentile(99%) = 1.51941 ms
+[I] GPU Compute Time: min = 13.3386 ms, max = 14.3186 ms, mean = 13.5448 ms, median = 13.5178 ms, percentile(99%) = 14.2151 ms
+[I] D2H Latency: min = 0.00878906 ms, max = 0.0172729 ms, mean = 0.0128844 ms, median = 0.0125732 ms, percentile(99%) = 0.0166016 ms
+[I] Total Host Walltime: 3.04768 s
+[I] Total GPU Compute Time: 3.03404 s
+[I] Explanations of the performance metrics are printed in the verbose logs.
+```
+Note: 73.5 qps x batch 8 = 588 fps @ ~15ms latency.
+
+## Model Repository
+
+See [Triton Model Repository Documentation](https://github.com/triton-inference-server/server/blob/main/docs/model_repository.md#model-repository) for more info.
+
+```bash
+# Create folder structure
+mkdir -p triton-deploy/models/yolov7/1/
+touch triton-deploy/models/yolov7/config.pbtxt
+# Place model
+mv yolov7-fp16-1x8x8.engine triton-deploy/models/yolov7/1/model.plan
+```
+
+## Model Configuration
+
+See [Triton Model Configuration Documentation](https://github.com/triton-inference-server/server/blob/main/docs/model_configuration.md#model-configuration) for more info.
+
+Minimal configuration for `triton-deploy/models/yolov7/config.pbtxt`:
+
+```
+name: "yolov7"
+platform: "tensorrt_plan"
+max_batch_size: 8
+dynamic_batching { }
+```
+
+Example repository:
+
+```bash
+$ tree triton-deploy/
+triton-deploy/
+└── models
+ └── yolov7
+ ├── 1
+ │ └── model.plan
+ └── config.pbtxt
+
+3 directories, 2 files
+```
+
+## Start Triton Inference Server
+
+```
+docker run --gpus all --rm --ipc=host --shm-size=1g --ulimit memlock=-1 --ulimit stack=67108864 -p8000:8000 -p8001:8001 -p8002:8002 -v$(pwd)/triton-deploy/models:/models nvcr.io/nvidia/tritonserver:22.06-py3 tritonserver --model-repository=/models --strict-model-config=false --log-verbose 1
+```
+
+In the log you should see:
+
+```
++--------+---------+--------+
+| Model | Version | Status |
++--------+---------+--------+
+| yolov7 | 1 | READY |
++--------+---------+--------+
+```
+
+## Performance with Model Analyzer
+
+See [Triton Model Analyzer Documentation](https://github.com/triton-inference-server/server/blob/main/docs/model_analyzer.md#model-analyzer) for more info.
+
+Performance numbers @ RTX 3090 + AMD Ryzen 9 5950X
+
+Example test for 16 concurrent clients using shared memory, each with batch size 1 requests:
+
+```bash
+docker run -it --ipc=host --net=host nvcr.io/nvidia/tritonserver:22.06-py3-sdk /bin/bash
+
+./install/bin/perf_analyzer -m yolov7 -u 127.0.0.1:8001 -i grpc --shared-memory system --concurrency-range 16
+
+# Result (truncated)
+Concurrency: 16, throughput: 590.119 infer/sec, latency 27080 usec
+```
+
+Throughput for 16 clients with batch size 1 is the same as for a single thread running the engine at 16 batch size locally thanks to Triton [Dynamic Batching Strategy](https://github.com/triton-inference-server/server/blob/main/docs/model_configuration.md#dynamic-batcher). Result without dynamic batching (disable in model configuration) considerably worse:
+
+```bash
+# Result (truncated)
+Concurrency: 16, throughput: 335.587 infer/sec, latency 47616 usec
+```
+
+## How to run model in your code
+
+Example client can be found in client.py. It can run dummy input, images and videos.
+
+```bash
+pip3 install tritonclient[all] opencv-python
+python3 client.py image data/dog.jpg
+```
+
+
+
+```
+$ python3 client.py --help
+usage: client.py [-h] [-m MODEL] [--width WIDTH] [--height HEIGHT] [-u URL] [-o OUT] [-f FPS] [-i] [-v] [-t CLIENT_TIMEOUT] [-s] [-r ROOT_CERTIFICATES] [-p PRIVATE_KEY] [-x CERTIFICATE_CHAIN] {dummy,image,video} [input]
+
+positional arguments:
+ {dummy,image,video} Run mode. 'dummy' will send an emtpy buffer to the server to test if inference works. 'image' will process an image. 'video' will process a video.
+ input Input file to load from in image or video mode
+
+optional arguments:
+ -h, --help show this help message and exit
+ -m MODEL, --model MODEL
+ Inference model name, default yolov7
+ --width WIDTH Inference model input width, default 640
+ --height HEIGHT Inference model input height, default 640
+ -u URL, --url URL Inference server URL, default localhost:8001
+ -o OUT, --out OUT Write output into file instead of displaying it
+ -f FPS, --fps FPS Video output fps, default 24.0 FPS
+ -i, --model-info Print model status, configuration and statistics
+ -v, --verbose Enable verbose client output
+ -t CLIENT_TIMEOUT, --client-timeout CLIENT_TIMEOUT
+ Client timeout in seconds, default no timeout
+ -s, --ssl Enable SSL encrypted channel to the server
+ -r ROOT_CERTIFICATES, --root-certificates ROOT_CERTIFICATES
+ File holding PEM-encoded root certificates, default none
+ -p PRIVATE_KEY, --private-key PRIVATE_KEY
+ File holding PEM-encoded private key, default is none
+ -x CERTIFICATE_CHAIN, --certificate-chain CERTIFICATE_CHAIN
+ File holding PEM-encoded certicate chain default is none
+```
diff --git a/ipex/deploy/triton-inference-server/boundingbox.py b/ipex/deploy/triton-inference-server/boundingbox.py
new file mode 100644
index 000000000..8b95330b8
--- /dev/null
+++ b/ipex/deploy/triton-inference-server/boundingbox.py
@@ -0,0 +1,33 @@
+class BoundingBox:
+ def __init__(self, classID, confidence, x1, x2, y1, y2, image_width, image_height):
+ self.classID = classID
+ self.confidence = confidence
+ self.x1 = x1
+ self.x2 = x2
+ self.y1 = y1
+ self.y2 = y2
+ self.u1 = x1 / image_width
+ self.u2 = x2 / image_width
+ self.v1 = y1 / image_height
+ self.v2 = y2 / image_height
+
+ def box(self):
+ return (self.x1, self.y1, self.x2, self.y2)
+
+ def width(self):
+ return self.x2 - self.x1
+
+ def height(self):
+ return self.y2 - self.y1
+
+ def center_absolute(self):
+ return (0.5 * (self.x1 + self.x2), 0.5 * (self.y1 + self.y2))
+
+ def center_normalized(self):
+ return (0.5 * (self.u1 + self.u2), 0.5 * (self.v1 + self.v2))
+
+ def size_absolute(self):
+ return (self.x2 - self.x1, self.y2 - self.y1)
+
+ def size_normalized(self):
+ return (self.u2 - self.u1, self.v2 - self.v1)
diff --git a/ipex/deploy/triton-inference-server/client.py b/ipex/deploy/triton-inference-server/client.py
new file mode 100644
index 000000000..aedca11c7
--- /dev/null
+++ b/ipex/deploy/triton-inference-server/client.py
@@ -0,0 +1,334 @@
+#!/usr/bin/env python
+
+import argparse
+import numpy as np
+import sys
+import cv2
+
+import tritonclient.grpc as grpcclient
+from tritonclient.utils import InferenceServerException
+
+from processing import preprocess, postprocess
+from render import render_box, render_filled_box, get_text_size, render_text, RAND_COLORS
+from labels import COCOLabels
+
+INPUT_NAMES = ["images"]
+OUTPUT_NAMES = ["num_dets", "det_boxes", "det_scores", "det_classes"]
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('mode',
+ choices=['dummy', 'image', 'video'],
+ default='dummy',
+ help='Run mode. \'dummy\' will send an emtpy buffer to the server to test if inference works. \'image\' will process an image. \'video\' will process a video.')
+ parser.add_argument('input',
+ type=str,
+ nargs='?',
+ help='Input file to load from in image or video mode')
+ parser.add_argument('-m',
+ '--model',
+ type=str,
+ required=False,
+ default='yolov7',
+ help='Inference model name, default yolov7')
+ parser.add_argument('--width',
+ type=int,
+ required=False,
+ default=640,
+ help='Inference model input width, default 640')
+ parser.add_argument('--height',
+ type=int,
+ required=False,
+ default=640,
+ help='Inference model input height, default 640')
+ parser.add_argument('-u',
+ '--url',
+ type=str,
+ required=False,
+ default='localhost:8001',
+ help='Inference server URL, default localhost:8001')
+ parser.add_argument('-o',
+ '--out',
+ type=str,
+ required=False,
+ default='',
+ help='Write output into file instead of displaying it')
+ parser.add_argument('-f',
+ '--fps',
+ type=float,
+ required=False,
+ default=24.0,
+ help='Video output fps, default 24.0 FPS')
+ parser.add_argument('-i',
+ '--model-info',
+ action="store_true",
+ required=False,
+ default=False,
+ help='Print model status, configuration and statistics')
+ parser.add_argument('-v',
+ '--verbose',
+ action="store_true",
+ required=False,
+ default=False,
+ help='Enable verbose client output')
+ parser.add_argument('-t',
+ '--client-timeout',
+ type=float,
+ required=False,
+ default=None,
+ help='Client timeout in seconds, default no timeout')
+ parser.add_argument('-s',
+ '--ssl',
+ action="store_true",
+ required=False,
+ default=False,
+ help='Enable SSL encrypted channel to the server')
+ parser.add_argument('-r',
+ '--root-certificates',
+ type=str,
+ required=False,
+ default=None,
+ help='File holding PEM-encoded root certificates, default none')
+ parser.add_argument('-p',
+ '--private-key',
+ type=str,
+ required=False,
+ default=None,
+ help='File holding PEM-encoded private key, default is none')
+ parser.add_argument('-x',
+ '--certificate-chain',
+ type=str,
+ required=False,
+ default=None,
+ help='File holding PEM-encoded certicate chain default is none')
+
+ FLAGS = parser.parse_args()
+
+ # Create server context
+ try:
+ triton_client = grpcclient.InferenceServerClient(
+ url=FLAGS.url,
+ verbose=FLAGS.verbose,
+ ssl=FLAGS.ssl,
+ root_certificates=FLAGS.root_certificates,
+ private_key=FLAGS.private_key,
+ certificate_chain=FLAGS.certificate_chain)
+ except Exception as e:
+ print("context creation failed: " + str(e))
+ sys.exit()
+
+ # Health check
+ if not triton_client.is_server_live():
+ print("FAILED : is_server_live")
+ sys.exit(1)
+
+ if not triton_client.is_server_ready():
+ print("FAILED : is_server_ready")
+ sys.exit(1)
+
+ if not triton_client.is_model_ready(FLAGS.model):
+ print("FAILED : is_model_ready")
+ sys.exit(1)
+
+ if FLAGS.model_info:
+ # Model metadata
+ try:
+ metadata = triton_client.get_model_metadata(FLAGS.model)
+ print(metadata)
+ except InferenceServerException as ex:
+ if "Request for unknown model" not in ex.message():
+ print("FAILED : get_model_metadata")
+ print("Got: {}".format(ex.message()))
+ sys.exit(1)
+ else:
+ print("FAILED : get_model_metadata")
+ sys.exit(1)
+
+ # Model configuration
+ try:
+ config = triton_client.get_model_config(FLAGS.model)
+ if not (config.config.name == FLAGS.model):
+ print("FAILED: get_model_config")
+ sys.exit(1)
+ print(config)
+ except InferenceServerException as ex:
+ print("FAILED : get_model_config")
+ print("Got: {}".format(ex.message()))
+ sys.exit(1)
+
+ # DUMMY MODE
+ if FLAGS.mode == 'dummy':
+ print("Running in 'dummy' mode")
+ print("Creating emtpy buffer filled with ones...")
+ inputs = []
+ outputs = []
+ inputs.append(grpcclient.InferInput(INPUT_NAMES[0], [1, 3, FLAGS.width, FLAGS.height], "FP32"))
+ inputs[0].set_data_from_numpy(np.ones(shape=(1, 3, FLAGS.width, FLAGS.height), dtype=np.float32))
+ outputs.append(grpcclient.InferRequestedOutput(OUTPUT_NAMES[0]))
+ outputs.append(grpcclient.InferRequestedOutput(OUTPUT_NAMES[1]))
+ outputs.append(grpcclient.InferRequestedOutput(OUTPUT_NAMES[2]))
+ outputs.append(grpcclient.InferRequestedOutput(OUTPUT_NAMES[3]))
+
+ print("Invoking inference...")
+ results = triton_client.infer(model_name=FLAGS.model,
+ inputs=inputs,
+ outputs=outputs,
+ client_timeout=FLAGS.client_timeout)
+ if FLAGS.model_info:
+ statistics = triton_client.get_inference_statistics(model_name=FLAGS.model)
+ if len(statistics.model_stats) != 1:
+ print("FAILED: get_inference_statistics")
+ sys.exit(1)
+ print(statistics)
+ print("Done")
+
+ for output in OUTPUT_NAMES:
+ result = results.as_numpy(output)
+ print(f"Received result buffer \"{output}\" of size {result.shape}")
+ print(f"Naive buffer sum: {np.sum(result)}")
+
+ # IMAGE MODE
+ if FLAGS.mode == 'image':
+ print("Running in 'image' mode")
+ if not FLAGS.input:
+ print("FAILED: no input image")
+ sys.exit(1)
+
+ inputs = []
+ outputs = []
+ inputs.append(grpcclient.InferInput(INPUT_NAMES[0], [1, 3, FLAGS.width, FLAGS.height], "FP32"))
+ outputs.append(grpcclient.InferRequestedOutput(OUTPUT_NAMES[0]))
+ outputs.append(grpcclient.InferRequestedOutput(OUTPUT_NAMES[1]))
+ outputs.append(grpcclient.InferRequestedOutput(OUTPUT_NAMES[2]))
+ outputs.append(grpcclient.InferRequestedOutput(OUTPUT_NAMES[3]))
+
+ print("Creating buffer from image file...")
+ input_image = cv2.imread(str(FLAGS.input))
+ if input_image is None:
+ print(f"FAILED: could not load input image {str(FLAGS.input)}")
+ sys.exit(1)
+ input_image_buffer = preprocess(input_image, [FLAGS.width, FLAGS.height])
+ input_image_buffer = np.expand_dims(input_image_buffer, axis=0)
+
+ inputs[0].set_data_from_numpy(input_image_buffer)
+
+ print("Invoking inference...")
+ results = triton_client.infer(model_name=FLAGS.model,
+ inputs=inputs,
+ outputs=outputs,
+ client_timeout=FLAGS.client_timeout)
+ if FLAGS.model_info:
+ statistics = triton_client.get_inference_statistics(model_name=FLAGS.model)
+ if len(statistics.model_stats) != 1:
+ print("FAILED: get_inference_statistics")
+ sys.exit(1)
+ print(statistics)
+ print("Done")
+
+ for output in OUTPUT_NAMES:
+ result = results.as_numpy(output)
+ print(f"Received result buffer \"{output}\" of size {result.shape}")
+ print(f"Naive buffer sum: {np.sum(result)}")
+
+ num_dets = results.as_numpy(OUTPUT_NAMES[0])
+ det_boxes = results.as_numpy(OUTPUT_NAMES[1])
+ det_scores = results.as_numpy(OUTPUT_NAMES[2])
+ det_classes = results.as_numpy(OUTPUT_NAMES[3])
+ detected_objects = postprocess(num_dets, det_boxes, det_scores, det_classes, input_image.shape[1], input_image.shape[0], [FLAGS.width, FLAGS.height])
+ print(f"Detected objects: {len(detected_objects)}")
+
+ for box in detected_objects:
+ print(f"{COCOLabels(box.classID).name}: {box.confidence}")
+ input_image = render_box(input_image, box.box(), color=tuple(RAND_COLORS[box.classID % 64].tolist()))
+ size = get_text_size(input_image, f"{COCOLabels(box.classID).name}: {box.confidence:.2f}", normalised_scaling=0.6)
+ input_image = render_filled_box(input_image, (box.x1 - 3, box.y1 - 3, box.x1 + size[0], box.y1 + size[1]), color=(220, 220, 220))
+ input_image = render_text(input_image, f"{COCOLabels(box.classID).name}: {box.confidence:.2f}", (box.x1, box.y1), color=(30, 30, 30), normalised_scaling=0.5)
+
+ if FLAGS.out:
+ cv2.imwrite(FLAGS.out, input_image)
+ print(f"Saved result to {FLAGS.out}")
+ else:
+ cv2.imshow('image', input_image)
+ cv2.waitKey(0)
+ cv2.destroyAllWindows()
+
+ # VIDEO MODE
+ if FLAGS.mode == 'video':
+ print("Running in 'video' mode")
+ if not FLAGS.input:
+ print("FAILED: no input video")
+ sys.exit(1)
+
+ inputs = []
+ outputs = []
+ inputs.append(grpcclient.InferInput(INPUT_NAMES[0], [1, 3, FLAGS.width, FLAGS.height], "FP32"))
+ outputs.append(grpcclient.InferRequestedOutput(OUTPUT_NAMES[0]))
+ outputs.append(grpcclient.InferRequestedOutput(OUTPUT_NAMES[1]))
+ outputs.append(grpcclient.InferRequestedOutput(OUTPUT_NAMES[2]))
+ outputs.append(grpcclient.InferRequestedOutput(OUTPUT_NAMES[3]))
+
+ print("Opening input video stream...")
+ cap = cv2.VideoCapture(FLAGS.input)
+ if not cap.isOpened():
+ print(f"FAILED: cannot open video {FLAGS.input}")
+ sys.exit(1)
+
+ counter = 0
+ out = None
+ print("Invoking inference...")
+ while True:
+ ret, frame = cap.read()
+ if not ret:
+ print("failed to fetch next frame")
+ break
+
+ if counter == 0 and FLAGS.out:
+ print("Opening output video stream...")
+ fourcc = cv2.VideoWriter_fourcc('M', 'P', '4', 'V')
+ out = cv2.VideoWriter(FLAGS.out, fourcc, FLAGS.fps, (frame.shape[1], frame.shape[0]))
+
+ input_image_buffer = preprocess(frame, [FLAGS.width, FLAGS.height])
+ input_image_buffer = np.expand_dims(input_image_buffer, axis=0)
+
+ inputs[0].set_data_from_numpy(input_image_buffer)
+
+ results = triton_client.infer(model_name=FLAGS.model,
+ inputs=inputs,
+ outputs=outputs,
+ client_timeout=FLAGS.client_timeout)
+
+ num_dets = results.as_numpy("num_dets")
+ det_boxes = results.as_numpy("det_boxes")
+ det_scores = results.as_numpy("det_scores")
+ det_classes = results.as_numpy("det_classes")
+ detected_objects = postprocess(num_dets, det_boxes, det_scores, det_classes, frame.shape[1], frame.shape[0], [FLAGS.width, FLAGS.height])
+ print(f"Frame {counter}: {len(detected_objects)} objects")
+ counter += 1
+
+ for box in detected_objects:
+ print(f"{COCOLabels(box.classID).name}: {box.confidence}")
+ frame = render_box(frame, box.box(), color=tuple(RAND_COLORS[box.classID % 64].tolist()))
+ size = get_text_size(frame, f"{COCOLabels(box.classID).name}: {box.confidence:.2f}", normalised_scaling=0.6)
+ frame = render_filled_box(frame, (box.x1 - 3, box.y1 - 3, box.x1 + size[0], box.y1 + size[1]), color=(220, 220, 220))
+ frame = render_text(frame, f"{COCOLabels(box.classID).name}: {box.confidence:.2f}", (box.x1, box.y1), color=(30, 30, 30), normalised_scaling=0.5)
+
+ if FLAGS.out:
+ out.write(frame)
+ else:
+ cv2.imshow('image', frame)
+ if cv2.waitKey(1) == ord('q'):
+ break
+
+ if FLAGS.model_info:
+ statistics = triton_client.get_inference_statistics(model_name=FLAGS.model)
+ if len(statistics.model_stats) != 1:
+ print("FAILED: get_inference_statistics")
+ sys.exit(1)
+ print(statistics)
+ print("Done")
+
+ cap.release()
+ if FLAGS.out:
+ out.release()
+ else:
+ cv2.destroyAllWindows()
diff --git a/ipex/deploy/triton-inference-server/labels.py b/ipex/deploy/triton-inference-server/labels.py
new file mode 100644
index 000000000..ba6c5c516
--- /dev/null
+++ b/ipex/deploy/triton-inference-server/labels.py
@@ -0,0 +1,83 @@
+from enum import Enum
+
+class COCOLabels(Enum):
+ PERSON = 0
+ BICYCLE = 1
+ CAR = 2
+ MOTORBIKE = 3
+ AEROPLANE = 4
+ BUS = 5
+ TRAIN = 6
+ TRUCK = 7
+ BOAT = 8
+ TRAFFIC_LIGHT = 9
+ FIRE_HYDRANT = 10
+ STOP_SIGN = 11
+ PARKING_METER = 12
+ BENCH = 13
+ BIRD = 14
+ CAT = 15
+ DOG = 16
+ HORSE = 17
+ SHEEP = 18
+ COW = 19
+ ELEPHANT = 20
+ BEAR = 21
+ ZEBRA = 22
+ GIRAFFE = 23
+ BACKPACK = 24
+ UMBRELLA = 25
+ HANDBAG = 26
+ TIE = 27
+ SUITCASE = 28
+ FRISBEE = 29
+ SKIS = 30
+ SNOWBOARD = 31
+ SPORTS_BALL = 32
+ KITE = 33
+ BASEBALL_BAT = 34
+ BASEBALL_GLOVE = 35
+ SKATEBOARD = 36
+ SURFBOARD = 37
+ TENNIS_RACKET = 38
+ BOTTLE = 39
+ WINE_GLASS = 40
+ CUP = 41
+ FORK = 42
+ KNIFE = 43
+ SPOON = 44
+ BOWL = 45
+ BANANA = 46
+ APPLE = 47
+ SANDWICH = 48
+ ORANGE = 49
+ BROCCOLI = 50
+ CARROT = 51
+ HOT_DOG = 52
+ PIZZA = 53
+ DONUT = 54
+ CAKE = 55
+ CHAIR = 56
+ SOFA = 57
+ POTTEDPLANT = 58
+ BED = 59
+ DININGTABLE = 60
+ TOILET = 61
+ TVMONITOR = 62
+ LAPTOP = 63
+ MOUSE = 64
+ REMOTE = 65
+ KEYBOARD = 66
+ CELL_PHONE = 67
+ MICROWAVE = 68
+ OVEN = 69
+ TOASTER = 70
+ SINK = 71
+ REFRIGERATOR = 72
+ BOOK = 73
+ CLOCK = 74
+ VASE = 75
+ SCISSORS = 76
+ TEDDY_BEAR = 77
+ HAIR_DRIER = 78
+ TOOTHBRUSH = 79
diff --git a/ipex/deploy/triton-inference-server/processing.py b/ipex/deploy/triton-inference-server/processing.py
new file mode 100644
index 000000000..3d51c50a3
--- /dev/null
+++ b/ipex/deploy/triton-inference-server/processing.py
@@ -0,0 +1,51 @@
+from boundingbox import BoundingBox
+
+import cv2
+import numpy as np
+
+def preprocess(img, input_shape, letter_box=True):
+ if letter_box:
+ img_h, img_w, _ = img.shape
+ new_h, new_w = input_shape[0], input_shape[1]
+ offset_h, offset_w = 0, 0
+ if (new_w / img_w) <= (new_h / img_h):
+ new_h = int(img_h * new_w / img_w)
+ offset_h = (input_shape[0] - new_h) // 2
+ else:
+ new_w = int(img_w * new_h / img_h)
+ offset_w = (input_shape[1] - new_w) // 2
+ resized = cv2.resize(img, (new_w, new_h))
+ img = np.full((input_shape[0], input_shape[1], 3), 127, dtype=np.uint8)
+ img[offset_h:(offset_h + new_h), offset_w:(offset_w + new_w), :] = resized
+ else:
+ img = cv2.resize(img, (input_shape[1], input_shape[0]))
+
+ img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
+ img = img.transpose((2, 0, 1)).astype(np.float32)
+ img /= 255.0
+ return img
+
+def postprocess(num_dets, det_boxes, det_scores, det_classes, img_w, img_h, input_shape, letter_box=True):
+ boxes = det_boxes[0, :num_dets[0][0]] / np.array([input_shape[0], input_shape[1], input_shape[0], input_shape[1]], dtype=np.float32)
+ scores = det_scores[0, :num_dets[0][0]]
+ classes = det_classes[0, :num_dets[0][0]].astype(np.int)
+
+ old_h, old_w = img_h, img_w
+ offset_h, offset_w = 0, 0
+ if letter_box:
+ if (img_w / input_shape[1]) >= (img_h / input_shape[0]):
+ old_h = int(input_shape[0] * img_w / input_shape[1])
+ offset_h = (old_h - img_h) // 2
+ else:
+ old_w = int(input_shape[1] * img_h / input_shape[0])
+ offset_w = (old_w - img_w) // 2
+
+ boxes = boxes * np.array([old_w, old_h, old_w, old_h], dtype=np.float32)
+ if letter_box:
+ boxes -= np.array([offset_w, offset_h, offset_w, offset_h], dtype=np.float32)
+ boxes = boxes.astype(np.int)
+
+ detected_objects = []
+ for box, score, label in zip(boxes, scores, classes):
+ detected_objects.append(BoundingBox(label, score, box[0], box[2], box[1], box[3], img_w, img_h))
+ return detected_objects
diff --git a/ipex/deploy/triton-inference-server/render.py b/ipex/deploy/triton-inference-server/render.py
new file mode 100644
index 000000000..dea040156
--- /dev/null
+++ b/ipex/deploy/triton-inference-server/render.py
@@ -0,0 +1,110 @@
+import numpy as np
+
+import cv2
+
+from math import sqrt
+
+_LINE_THICKNESS_SCALING = 500.0
+
+np.random.seed(0)
+RAND_COLORS = np.random.randint(50, 255, (64, 3), "int") # used for class visu
+RAND_COLORS[0] = [220, 220, 220]
+
+def render_box(img, box, color=(200, 200, 200)):
+ """
+ Render a box. Calculates scaling and thickness automatically.
+ :param img: image to render into
+ :param box: (x1, y1, x2, y2) - box coordinates
+ :param color: (b, g, r) - box color
+ :return: updated image
+ """
+ x1, y1, x2, y2 = box
+ thickness = int(
+ round(
+ (img.shape[0] * img.shape[1])
+ / (_LINE_THICKNESS_SCALING * _LINE_THICKNESS_SCALING)
+ )
+ )
+ thickness = max(1, thickness)
+ img = cv2.rectangle(
+ img,
+ (int(x1), int(y1)),
+ (int(x2), int(y2)),
+ color,
+ thickness=thickness
+ )
+ return img
+
+def render_filled_box(img, box, color=(200, 200, 200)):
+ """
+ Render a box. Calculates scaling and thickness automatically.
+ :param img: image to render into
+ :param box: (x1, y1, x2, y2) - box coordinates
+ :param color: (b, g, r) - box color
+ :return: updated image
+ """
+ x1, y1, x2, y2 = box
+ img = cv2.rectangle(
+ img,
+ (int(x1), int(y1)),
+ (int(x2), int(y2)),
+ color,
+ thickness=cv2.FILLED
+ )
+ return img
+
+_TEXT_THICKNESS_SCALING = 700.0
+_TEXT_SCALING = 520.0
+
+
+def get_text_size(img, text, normalised_scaling=1.0):
+ """
+ Get calculated text size (as box width and height)
+ :param img: image reference, used to determine appropriate text scaling
+ :param text: text to display
+ :param normalised_scaling: additional normalised scaling. Default 1.0.
+ :return: (width, height) - width and height of text box
+ """
+ thickness = int(
+ round(
+ (img.shape[0] * img.shape[1])
+ / (_TEXT_THICKNESS_SCALING * _TEXT_THICKNESS_SCALING)
+ )
+ * normalised_scaling
+ )
+ thickness = max(1, thickness)
+ scaling = img.shape[0] / _TEXT_SCALING * normalised_scaling
+ return cv2.getTextSize(text, cv2.FONT_HERSHEY_SIMPLEX, scaling, thickness)[0]
+
+
+def render_text(img, text, pos, color=(200, 200, 200), normalised_scaling=1.0):
+ """
+ Render a text into the image. Calculates scaling and thickness automatically.
+ :param img: image to render into
+ :param text: text to display
+ :param pos: (x, y) - upper left coordinates of render position
+ :param color: (b, g, r) - text color
+ :param normalised_scaling: additional normalised scaling. Default 1.0.
+ :return: updated image
+ """
+ x, y = pos
+ thickness = int(
+ round(
+ (img.shape[0] * img.shape[1])
+ / (_TEXT_THICKNESS_SCALING * _TEXT_THICKNESS_SCALING)
+ )
+ * normalised_scaling
+ )
+ thickness = max(1, thickness)
+ scaling = img.shape[0] / _TEXT_SCALING * normalised_scaling
+ size = get_text_size(img, text, normalised_scaling)
+ cv2.putText(
+ img,
+ text,
+ (int(x), int(y + size[1])),
+ cv2.FONT_HERSHEY_SIMPLEX,
+ scaling,
+ color,
+ thickness=thickness,
+ )
+ return img
diff --git a/ipex/detect.py b/ipex/detect.py
new file mode 100644
index 000000000..5e0c4416a
--- /dev/null
+++ b/ipex/detect.py
@@ -0,0 +1,196 @@
+import argparse
+import time
+from pathlib import Path
+
+import cv2
+import torch
+import torch.backends.cudnn as cudnn
+from numpy import random
+
+from models.experimental import attempt_load
+from utils.datasets import LoadStreams, LoadImages
+from utils.general import check_img_size, check_requirements, check_imshow, non_max_suppression, apply_classifier, \
+ scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path
+from utils.plots import plot_one_box
+from utils.torch_utils import select_device, load_classifier, time_synchronized, TracedModel
+
+
+def detect(save_img=False):
+ source, weights, view_img, save_txt, imgsz, trace = opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_size, not opt.no_trace
+ save_img = not opt.nosave and not source.endswith('.txt') # save inference images
+ webcam = source.isnumeric() or source.endswith('.txt') or source.lower().startswith(
+ ('rtsp://', 'rtmp://', 'http://', 'https://'))
+
+ # Directories
+ save_dir = Path(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok)) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Initialize
+ set_logging()
+ device = select_device(opt.device)
+ half = device.type != 'cpu' # half precision only supported on CUDA
+
+ # Load model
+ model = attempt_load(weights, map_location=device) # load FP32 model
+ stride = int(model.stride.max()) # model stride
+ imgsz = check_img_size(imgsz, s=stride) # check img_size
+
+ if trace:
+ model = TracedModel(model, device, opt.img_size)
+
+ if half:
+ model.half() # to FP16
+
+ # Second-stage classifier
+ classify = False
+ if classify:
+ modelc = load_classifier(name='resnet101', n=2) # initialize
+ modelc.load_state_dict(torch.load('weights/resnet101.pt', map_location=device)['model']).to(device).eval()
+
+ # Set Dataloader
+ vid_path, vid_writer = None, None
+ if webcam:
+ view_img = check_imshow()
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride)
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride)
+
+ # Get names and colors
+ names = model.module.names if hasattr(model, 'module') else model.names
+ colors = [[random.randint(0, 255) for _ in range(3)] for _ in names]
+
+ # Run inference
+ if device.type != 'cpu':
+ model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
+ old_img_w = old_img_h = imgsz
+ old_img_b = 1
+
+ t0 = time.time()
+ for path, img, im0s, vid_cap in dataset:
+ img = torch.from_numpy(img).to(device)
+ img = img.half() if half else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ if img.ndimension() == 3:
+ img = img.unsqueeze(0)
+
+ # Warmup
+ if device.type != 'cpu' and (old_img_b != img.shape[0] or old_img_h != img.shape[2] or old_img_w != img.shape[3]):
+ old_img_b = img.shape[0]
+ old_img_h = img.shape[2]
+ old_img_w = img.shape[3]
+ for i in range(3):
+ model(img, augment=opt.augment)[0]
+
+ # Inference
+ t1 = time_synchronized()
+ with torch.no_grad(): # Calculating gradients would cause a GPU memory leak
+ pred = model(img, augment=opt.augment)[0]
+ t2 = time_synchronized()
+
+ # Apply NMS
+ pred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, classes=opt.classes, agnostic=opt.agnostic_nms)
+ t3 = time_synchronized()
+
+ # Apply Classifier
+ if classify:
+ pred = apply_classifier(pred, modelc, img, im0s)
+
+ # Process detections
+ for i, det in enumerate(pred): # detections per image
+ if webcam: # batch_size >= 1
+ p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.count
+ else:
+ p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)
+
+ p = Path(p) # to Path
+ save_path = str(save_dir / p.name) # img.jpg
+ txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # img.txt
+ gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
+
+ # Print results
+ for c in det[:, -1].unique():
+ n = (det[:, -1] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ if save_txt: # Write to file
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if opt.save_conf else (cls, *xywh) # label format
+ with open(txt_path + '.txt', 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+ if save_img or view_img: # Add bbox to image
+ label = f'{names[int(cls)]} {conf:.2f}'
+ plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=1)
+
+ # Print time (inference + NMS)
+ print(f'{s}Done. ({(1E3 * (t2 - t1)):.1f}ms) Inference, ({(1E3 * (t3 - t2)):.1f}ms) NMS')
+
+ # Stream results
+ if view_img:
+ cv2.imshow(str(p), im0)
+ cv2.waitKey(1) # 1 millisecond
+
+ # Save results (image with detections)
+ if save_img:
+ if dataset.mode == 'image':
+ cv2.imwrite(save_path, im0)
+ print(f" The image with the result is saved in: {save_path}")
+ else: # 'video' or 'stream'
+ if vid_path != save_path: # new video
+ vid_path = save_path
+ if isinstance(vid_writer, cv2.VideoWriter):
+ vid_writer.release() # release previous video writer
+ if vid_cap: # video
+ fps = vid_cap.get(cv2.CAP_PROP_FPS)
+ w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ else: # stream
+ fps, w, h = 30, im0.shape[1], im0.shape[0]
+ save_path += '.mp4'
+ vid_writer = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
+ vid_writer.write(im0)
+
+ if save_txt or save_img:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ #print(f"Results saved to {save_dir}{s}")
+
+ print(f'Done. ({time.time() - t0:.3f}s)')
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', nargs='+', type=str, default='yolov7.pt', help='model.pt path(s)')
+ parser.add_argument('--source', type=str, default='inference/images', help='source') # file/folder, 0 for webcam
+ parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='object confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--view-img', action='store_true', help='display results')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
+ parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 0 2 3')
+ parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--update', action='store_true', help='update all models')
+ parser.add_argument('--project', default='runs/detect', help='save results to project/name')
+ parser.add_argument('--name', default='exp', help='save results to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--no-trace', action='store_true', help='don`t trace model')
+ opt = parser.parse_args()
+ print(opt)
+ #check_requirements(exclude=('pycocotools', 'thop'))
+
+ with torch.no_grad():
+ if opt.update: # update all models (to fix SourceChangeWarning)
+ for opt.weights in ['yolov7.pt']:
+ detect()
+ strip_optimizer(opt.weights)
+ else:
+ detect()
diff --git a/ipex/export.py b/ipex/export.py
new file mode 100644
index 000000000..cf918aa42
--- /dev/null
+++ b/ipex/export.py
@@ -0,0 +1,205 @@
+import argparse
+import sys
+import time
+import warnings
+
+sys.path.append('./') # to run '$ python *.py' files in subdirectories
+
+import torch
+import torch.nn as nn
+from torch.utils.mobile_optimizer import optimize_for_mobile
+
+import models
+from models.experimental import attempt_load, End2End
+from utils.activations import Hardswish, SiLU
+from utils.general import set_logging, check_img_size
+from utils.torch_utils import select_device
+from utils.add_nms import RegisterNMS
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default='./yolor-csp-c.pt', help='weights path')
+ parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='image size') # height, width
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--dynamic', action='store_true', help='dynamic ONNX axes')
+ parser.add_argument('--dynamic-batch', action='store_true', help='dynamic batch onnx for tensorrt and onnx-runtime')
+ parser.add_argument('--grid', action='store_true', help='export Detect() layer grid')
+ parser.add_argument('--end2end', action='store_true', help='export end2end onnx')
+ parser.add_argument('--max-wh', type=int, default=None, help='None for tensorrt nms, int value for onnx-runtime nms')
+ parser.add_argument('--topk-all', type=int, default=100, help='topk objects for every images')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='iou threshold for NMS')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='conf threshold for NMS')
+ parser.add_argument('--device', default='cpu', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--simplify', action='store_true', help='simplify onnx model')
+ parser.add_argument('--include-nms', action='store_true', help='export end2end onnx')
+ parser.add_argument('--fp16', action='store_true', help='CoreML FP16 half-precision export')
+ parser.add_argument('--int8', action='store_true', help='CoreML INT8 quantization')
+ opt = parser.parse_args()
+ opt.img_size *= 2 if len(opt.img_size) == 1 else 1 # expand
+ opt.dynamic = opt.dynamic and not opt.end2end
+ opt.dynamic = False if opt.dynamic_batch else opt.dynamic
+ print(opt)
+ set_logging()
+ t = time.time()
+
+ # Load PyTorch model
+ device = select_device(opt.device)
+ model = attempt_load(opt.weights, map_location=device) # load FP32 model
+ labels = model.names
+
+ # Checks
+ gs = int(max(model.stride)) # grid size (max stride)
+ opt.img_size = [check_img_size(x, gs) for x in opt.img_size] # verify img_size are gs-multiples
+
+ # Input
+ img = torch.zeros(opt.batch_size, 3, *opt.img_size).to(device) # image size(1,3,320,192) iDetection
+
+ # Update model
+ for k, m in model.named_modules():
+ m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatibility
+ if isinstance(m, models.common.Conv): # assign export-friendly activations
+ if isinstance(m.act, nn.Hardswish):
+ m.act = Hardswish()
+ elif isinstance(m.act, nn.SiLU):
+ m.act = SiLU()
+ # elif isinstance(m, models.yolo.Detect):
+ # m.forward = m.forward_export # assign forward (optional)
+ model.model[-1].export = not opt.grid # set Detect() layer grid export
+ y = model(img) # dry run
+ if opt.include_nms:
+ model.model[-1].include_nms = True
+ y = None
+
+ # TorchScript export
+ try:
+ print('\nStarting TorchScript export with torch %s...' % torch.__version__)
+ f = opt.weights.replace('.pt', '.torchscript.pt') # filename
+ ts = torch.jit.trace(model, img, strict=False)
+ ts.save(f)
+ print('TorchScript export success, saved as %s' % f)
+ except Exception as e:
+ print('TorchScript export failure: %s' % e)
+
+ # CoreML export
+ try:
+ import coremltools as ct
+
+ print('\nStarting CoreML export with coremltools %s...' % ct.__version__)
+ # convert model from torchscript and apply pixel scaling as per detect.py
+ ct_model = ct.convert(ts, inputs=[ct.ImageType('image', shape=img.shape, scale=1 / 255.0, bias=[0, 0, 0])])
+ bits, mode = (8, 'kmeans_lut') if opt.int8 else (16, 'linear') if opt.fp16 else (32, None)
+ if bits < 32:
+ if sys.platform.lower() == 'darwin': # quantization only supported on macOS
+ with warnings.catch_warnings():
+ warnings.filterwarnings("ignore", category=DeprecationWarning) # suppress numpy==1.20 float warning
+ ct_model = ct.models.neural_network.quantization_utils.quantize_weights(ct_model, bits, mode)
+ else:
+ print('quantization only supported on macOS, skipping...')
+
+ f = opt.weights.replace('.pt', '.mlmodel') # filename
+ ct_model.save(f)
+ print('CoreML export success, saved as %s' % f)
+ except Exception as e:
+ print('CoreML export failure: %s' % e)
+
+ # TorchScript-Lite export
+ try:
+ print('\nStarting TorchScript-Lite export with torch %s...' % torch.__version__)
+ f = opt.weights.replace('.pt', '.torchscript.ptl') # filename
+ tsl = torch.jit.trace(model, img, strict=False)
+ tsl = optimize_for_mobile(tsl)
+ tsl._save_for_lite_interpreter(f)
+ print('TorchScript-Lite export success, saved as %s' % f)
+ except Exception as e:
+ print('TorchScript-Lite export failure: %s' % e)
+
+ # ONNX export
+ try:
+ import onnx
+
+ print('\nStarting ONNX export with onnx %s...' % onnx.__version__)
+ f = opt.weights.replace('.pt', '.onnx') # filename
+ model.eval()
+ output_names = ['classes', 'boxes'] if y is None else ['output']
+ dynamic_axes = None
+ if opt.dynamic:
+ dynamic_axes = {'images': {0: 'batch', 2: 'height', 3: 'width'}, # size(1,3,640,640)
+ 'output': {0: 'batch', 2: 'y', 3: 'x'}}
+ if opt.dynamic_batch:
+ opt.batch_size = 'batch'
+ dynamic_axes = {
+ 'images': {
+ 0: 'batch',
+ }, }
+ if opt.end2end and opt.max_wh is None:
+ output_axes = {
+ 'num_dets': {0: 'batch'},
+ 'det_boxes': {0: 'batch'},
+ 'det_scores': {0: 'batch'},
+ 'det_classes': {0: 'batch'},
+ }
+ else:
+ output_axes = {
+ 'output': {0: 'batch'},
+ }
+ dynamic_axes.update(output_axes)
+ if opt.grid:
+ if opt.end2end:
+ print('\nStarting export end2end onnx model for %s...' % 'TensorRT' if opt.max_wh is None else 'onnxruntime')
+ model = End2End(model,opt.topk_all,opt.iou_thres,opt.conf_thres,opt.max_wh,device,len(labels))
+ if opt.end2end and opt.max_wh is None:
+ output_names = ['num_dets', 'det_boxes', 'det_scores', 'det_classes']
+ shapes = [opt.batch_size, 1, opt.batch_size, opt.topk_all, 4,
+ opt.batch_size, opt.topk_all, opt.batch_size, opt.topk_all]
+ else:
+ output_names = ['output']
+ else:
+ model.model[-1].concat = True
+
+ torch.onnx.export(model, img, f, verbose=False, opset_version=12, input_names=['images'],
+ output_names=output_names,
+ dynamic_axes=dynamic_axes)
+
+ # Checks
+ onnx_model = onnx.load(f) # load onnx model
+ onnx.checker.check_model(onnx_model) # check onnx model
+
+ if opt.end2end and opt.max_wh is None:
+ for i in onnx_model.graph.output:
+ for j in i.type.tensor_type.shape.dim:
+ j.dim_param = str(shapes.pop(0))
+
+ # print(onnx.helper.printable_graph(onnx_model.graph)) # print a human readable model
+
+ # # Metadata
+ # d = {'stride': int(max(model.stride))}
+ # for k, v in d.items():
+ # meta = onnx_model.metadata_props.add()
+ # meta.key, meta.value = k, str(v)
+ # onnx.save(onnx_model, f)
+
+ if opt.simplify:
+ try:
+ import onnxsim
+
+ print('\nStarting to simplify ONNX...')
+ onnx_model, check = onnxsim.simplify(onnx_model)
+ assert check, 'assert check failed'
+ except Exception as e:
+ print(f'Simplifier failure: {e}')
+
+ # print(onnx.helper.printable_graph(onnx_model.graph)) # print a human readable model
+ onnx.save(onnx_model,f)
+ print('ONNX export success, saved as %s' % f)
+
+ if opt.include_nms:
+ print('Registering NMS plugin for ONNX...')
+ mo = RegisterNMS(f)
+ mo.register_nms()
+ mo.save(f)
+
+ except Exception as e:
+ print('ONNX export failure: %s' % e)
+
+ # Finish
+ print('\nExport complete (%.2fs). Visualize with https://github.com/lutzroeder/netron.' % (time.time() - t))
diff --git a/ipex/hubconf.py b/ipex/hubconf.py
new file mode 100644
index 000000000..50ff257e2
--- /dev/null
+++ b/ipex/hubconf.py
@@ -0,0 +1,97 @@
+"""PyTorch Hub models
+
+Usage:
+ import torch
+ model = torch.hub.load('repo', 'model')
+"""
+
+from pathlib import Path
+
+import torch
+
+from models.yolo import Model
+from utils.general import check_requirements, set_logging
+from utils.google_utils import attempt_download
+from utils.torch_utils import select_device
+
+dependencies = ['torch', 'yaml']
+check_requirements(Path(__file__).parent / 'requirements.txt', exclude=('pycocotools', 'thop'))
+set_logging()
+
+
+def create(name, pretrained, channels, classes, autoshape):
+ """Creates a specified model
+
+ Arguments:
+ name (str): name of model, i.e. 'yolov7'
+ pretrained (bool): load pretrained weights into the model
+ channels (int): number of input channels
+ classes (int): number of model classes
+
+ Returns:
+ pytorch model
+ """
+ try:
+ cfg = list((Path(__file__).parent / 'cfg').rglob(f'{name}.yaml'))[0] # model.yaml path
+ model = Model(cfg, channels, classes)
+ if pretrained:
+ fname = f'{name}.pt' # checkpoint filename
+ attempt_download(fname) # download if not found locally
+ ckpt = torch.load(fname, map_location=torch.device('cpu')) # load
+ msd = model.state_dict() # model state_dict
+ csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
+ csd = {k: v for k, v in csd.items() if msd[k].shape == v.shape} # filter
+ model.load_state_dict(csd, strict=False) # load
+ if len(ckpt['model'].names) == classes:
+ model.names = ckpt['model'].names # set class names attribute
+ if autoshape:
+ model = model.autoshape() # for file/URI/PIL/cv2/np inputs and NMS
+ device = select_device('0' if torch.cuda.is_available() else 'cpu') # default to GPU if available
+ return model.to(device)
+
+ except Exception as e:
+ s = 'Cache maybe be out of date, try force_reload=True.'
+ raise Exception(s) from e
+
+
+def custom(path_or_model='path/to/model.pt', autoshape=True):
+ """custom mode
+
+ Arguments (3 options):
+ path_or_model (str): 'path/to/model.pt'
+ path_or_model (dict): torch.load('path/to/model.pt')
+ path_or_model (nn.Module): torch.load('path/to/model.pt')['model']
+
+ Returns:
+ pytorch model
+ """
+ model = torch.load(path_or_model, map_location=torch.device('cpu')) if isinstance(path_or_model, str) else path_or_model # load checkpoint
+ if isinstance(model, dict):
+ model = model['ema' if model.get('ema') else 'model'] # load model
+
+ hub_model = Model(model.yaml).to(next(model.parameters()).device) # create
+ hub_model.load_state_dict(model.float().state_dict()) # load state_dict
+ hub_model.names = model.names # class names
+ if autoshape:
+ hub_model = hub_model.autoshape() # for file/URI/PIL/cv2/np inputs and NMS
+ device = select_device('0' if torch.cuda.is_available() else 'cpu') # default to GPU if available
+ return hub_model.to(device)
+
+
+def yolov7(pretrained=True, channels=3, classes=80, autoshape=True):
+ return create('yolov7', pretrained, channels, classes, autoshape)
+
+
+if __name__ == '__main__':
+ model = custom(path_or_model='yolov7.pt') # custom example
+ # model = create(name='yolov7', pretrained=True, channels=3, classes=80, autoshape=True) # pretrained example
+
+ # Verify inference
+ import numpy as np
+ from PIL import Image
+
+ imgs = [np.zeros((640, 480, 3))]
+
+ results = model(imgs) # batched inference
+ results.print()
+ results.save()
diff --git a/ipex/models/__init__.py b/ipex/models/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/ipex/models/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/ipex/models/common.py b/ipex/models/common.py
new file mode 100644
index 000000000..edb5edc9f
--- /dev/null
+++ b/ipex/models/common.py
@@ -0,0 +1,2019 @@
+import math
+from copy import copy
+from pathlib import Path
+
+import numpy as np
+import pandas as pd
+import requests
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+from torchvision.ops import DeformConv2d
+from PIL import Image
+from torch.cuda import amp
+
+from utils.datasets import letterbox
+from utils.general import non_max_suppression, make_divisible, scale_coords, increment_path, xyxy2xywh
+from utils.plots import color_list, plot_one_box
+from utils.torch_utils import time_synchronized
+
+
+##### basic ####
+
+def autopad(k, p=None): # kernel, padding
+ # Pad to 'same'
+ if p is None:
+ p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
+ return p
+
+
+class MP(nn.Module):
+ def __init__(self, k=2):
+ super(MP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class SP(nn.Module):
+ def __init__(self, k=3, s=1):
+ super(SP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=s, padding=k // 2)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class ReOrg(nn.Module):
+ def __init__(self):
+ super(ReOrg, self).__init__()
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1)
+
+
+class Concat(nn.Module):
+ def __init__(self, dimension=1):
+ super(Concat, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return torch.cat(x, self.d)
+
+
+class Chuncat(nn.Module):
+ def __init__(self, dimension=1):
+ super(Chuncat, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ x1 = []
+ x2 = []
+ for xi in x:
+ xi1, xi2 = xi.chunk(2, self.d)
+ x1.append(xi1)
+ x2.append(xi2)
+ return torch.cat(x1+x2, self.d)
+
+
+class Shortcut(nn.Module):
+ def __init__(self, dimension=0):
+ super(Shortcut, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return x[0]+x[1]
+
+
+class Foldcut(nn.Module):
+ def __init__(self, dimension=0):
+ super(Foldcut, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ x1, x2 = x.chunk(2, self.d)
+ return x1+x2
+
+
+class Conv(nn.Module):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Conv, self).__init__()
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ def forward(self, x):
+ return self.act(self.bn(self.conv(x)))
+
+ def fuseforward(self, x):
+ return self.act(self.conv(x))
+
+
+class RobustConv(nn.Module):
+ # Robust convolution (use high kernel size 7-11 for: downsampling and other layers). Train for 300 - 450 epochs.
+ def __init__(self, c1, c2, k=7, s=1, p=None, g=1, act=True, layer_scale_init_value=1e-6): # ch_in, ch_out, kernel, stride, padding, groups
+ super(RobustConv, self).__init__()
+ self.conv_dw = Conv(c1, c1, k=k, s=s, p=p, g=c1, act=act)
+ self.conv1x1 = nn.Conv2d(c1, c2, 1, 1, 0, groups=1, bias=True)
+ self.gamma = nn.Parameter(layer_scale_init_value * torch.ones(c2)) if layer_scale_init_value > 0 else None
+
+ def forward(self, x):
+ x = x.to(memory_format=torch.channels_last)
+ x = self.conv1x1(self.conv_dw(x))
+ if self.gamma is not None:
+ x = x.mul(self.gamma.reshape(1, -1, 1, 1))
+ return x
+
+
+class RobustConv2(nn.Module):
+ # Robust convolution 2 (use [32, 5, 2] or [32, 7, 4] or [32, 11, 8] for one of the paths in CSP).
+ def __init__(self, c1, c2, k=7, s=4, p=None, g=1, act=True, layer_scale_init_value=1e-6): # ch_in, ch_out, kernel, stride, padding, groups
+ super(RobustConv2, self).__init__()
+ self.conv_strided = Conv(c1, c1, k=k, s=s, p=p, g=c1, act=act)
+ self.conv_deconv = nn.ConvTranspose2d(in_channels=c1, out_channels=c2, kernel_size=s, stride=s,
+ padding=0, bias=True, dilation=1, groups=1
+ )
+ self.gamma = nn.Parameter(layer_scale_init_value * torch.ones(c2)) if layer_scale_init_value > 0 else None
+
+ def forward(self, x):
+ x = self.conv_deconv(self.conv_strided(x))
+ if self.gamma is not None:
+ x = x.mul(self.gamma.reshape(1, -1, 1, 1))
+ return x
+
+
+def DWConv(c1, c2, k=1, s=1, act=True):
+ # Depthwise convolution
+ return Conv(c1, c2, k, s, g=math.gcd(c1, c2), act=act)
+
+
+class GhostConv(nn.Module):
+ # Ghost Convolution https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
+ super(GhostConv, self).__init__()
+ c_ = c2 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, k, s, None, g, act)
+ self.cv2 = Conv(c_, c_, 5, 1, None, c_, act)
+
+ def forward(self, x):
+ y = self.cv1(x)
+ return torch.cat([y, self.cv2(y)], 1)
+
+
+class Stem(nn.Module):
+ # Stem
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Stem, self).__init__()
+ c_ = int(c2/2) # hidden channels
+ self.cv1 = Conv(c1, c_, 3, 2)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 2)
+ self.pool = torch.nn.MaxPool2d(2, stride=2)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ return self.cv4(torch.cat((self.cv3(self.cv2(x)), self.pool(x)), dim=1))
+
+
+class DownC(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, n=1, k=2):
+ super(DownC, self).__init__()
+ c_ = int(c1) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2//2, 3, k)
+ self.cv3 = Conv(c1, c2//2, 1, 1)
+ self.mp = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return torch.cat((self.cv2(self.cv1(x)), self.cv3(self.mp(x))), dim=1)
+
+
+class SPP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, k=(5, 9, 13)):
+ super(SPP, self).__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+
+ def forward(self, x):
+ x = self.cv1(x)
+ return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))
+
+
+class Bottleneck(nn.Module):
+ # Darknet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super(Bottleneck, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2, 3, 1, g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class Res(nn.Module):
+ # ResNet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super(Res, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 3, 1, g=g)
+ self.cv3 = Conv(c_, c2, 1, 1)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv3(self.cv2(self.cv1(x))) if self.add else self.cv3(self.cv2(self.cv1(x)))
+
+
+class ResX(Res):
+ # ResNet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=32, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+
+
+class Ghost(nn.Module):
+ # Ghost Bottleneck https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride
+ super(Ghost, self).__init__()
+ c_ = c2 // 2
+ self.conv = nn.Sequential(GhostConv(c1, c_, 1, 1), # pw
+ DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw
+ GhostConv(c_, c2, 1, 1, act=False)) # pw-linear
+ self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False),
+ Conv(c1, c2, 1, 1, act=False)) if s == 2 else nn.Identity()
+
+ def forward(self, x):
+ return self.conv(x) + self.shortcut(x)
+
+##### end of basic #####
+
+
+##### cspnet #####
+
+class SPPCSPC(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super(SPPCSPC, self).__init__()
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 1)
+ self.cv4 = Conv(c_, c_, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+ self.cv5 = Conv(4 * c_, c_, 1, 1)
+ self.cv6 = Conv(c_, c_, 3, 1)
+ self.cv7 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x1 = self.cv4(self.cv3(self.cv1(x)))
+ y1 = self.cv6(self.cv5(torch.cat([x1] + [m(x1) for m in self.m], 1)))
+ y2 = self.cv2(x)
+ return self.cv7(torch.cat((y1, y2), dim=1))
+
+class GhostSPPCSPC(SPPCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super().__init__(c1, c2, n, shortcut, g, e, k)
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = GhostConv(c1, c_, 1, 1)
+ self.cv2 = GhostConv(c1, c_, 1, 1)
+ self.cv3 = GhostConv(c_, c_, 3, 1)
+ self.cv4 = GhostConv(c_, c_, 1, 1)
+ self.cv5 = GhostConv(4 * c_, c_, 1, 1)
+ self.cv6 = GhostConv(c_, c_, 3, 1)
+ self.cv7 = GhostConv(2 * c_, c2, 1, 1)
+
+
+class GhostStem(Stem):
+ # Stem
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__(c1, c2, k, s, p, g, act)
+ c_ = int(c2/2) # hidden channels
+ self.cv1 = GhostConv(c1, c_, 3, 2)
+ self.cv2 = GhostConv(c_, c_, 1, 1)
+ self.cv3 = GhostConv(c_, c_, 3, 2)
+ self.cv4 = GhostConv(2 * c_, c2, 1, 1)
+
+
+class BottleneckCSPA(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class BottleneckCSPB(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class BottleneckCSPC(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+
+class ResCSPA(BottleneckCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResCSPB(BottleneckCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResCSPC(BottleneckCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResXCSPA(ResCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class ResXCSPB(ResCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class ResXCSPC(ResCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class GhostCSPA(BottleneckCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+
+class GhostCSPB(BottleneckCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+
+class GhostCSPC(BottleneckCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+##### end of cspnet #####
+
+
+##### yolor #####
+
+class ImplicitA(nn.Module):
+ def __init__(self, channel, mean=0., std=.02):
+ super(ImplicitA, self).__init__()
+ self.channel = channel
+ self.mean = mean
+ self.std = std
+ self.implicit = nn.Parameter(torch.zeros(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=self.mean, std=self.std)
+
+ def forward(self, x):
+ return self.implicit + x
+
+
+class ImplicitM(nn.Module):
+ def __init__(self, channel, mean=1., std=.02):
+ super(ImplicitM, self).__init__()
+ self.channel = channel
+ self.mean = mean
+ self.std = std
+ self.implicit = nn.Parameter(torch.ones(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=self.mean, std=self.std)
+
+ def forward(self, x):
+ return self.implicit * x
+
+##### end of yolor #####
+
+
+##### repvgg #####
+
+class RepConv(nn.Module):
+ # Represented convolution
+ # https://arxiv.org/abs/2101.03697
+
+ def __init__(self, c1, c2, k=3, s=1, p=None, g=1, act=True, deploy=False):
+ super(RepConv, self).__init__()
+
+ self.deploy = deploy
+ self.groups = g
+ self.in_channels = c1
+ self.out_channels = c2
+
+ assert k == 3
+ assert autopad(k, p) == 1
+
+ padding_11 = autopad(k, p) - k // 2
+
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ if deploy:
+ self.rbr_reparam = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=True)
+
+ else:
+ self.rbr_identity = (nn.BatchNorm2d(num_features=c1) if c2 == c1 and s == 1 else None)
+
+ self.rbr_dense = nn.Sequential(
+ nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False),
+ nn.BatchNorm2d(num_features=c2),
+ )
+
+ self.rbr_1x1 = nn.Sequential(
+ nn.Conv2d( c1, c2, 1, s, padding_11, groups=g, bias=False),
+ nn.BatchNorm2d(num_features=c2),
+ )
+
+ def forward(self, inputs):
+ if hasattr(self, "rbr_reparam"):
+ return self.act(self.rbr_reparam(inputs))
+
+ if self.rbr_identity is None:
+ id_out = 0
+ else:
+ id_out = self.rbr_identity(inputs)
+
+ return self.act(self.rbr_dense(inputs) + self.rbr_1x1(inputs) + id_out)
+
+ def get_equivalent_kernel_bias(self):
+ kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense)
+ kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1)
+ kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity)
+ return (
+ kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1) + kernelid,
+ bias3x3 + bias1x1 + biasid,
+ )
+
+ def _pad_1x1_to_3x3_tensor(self, kernel1x1):
+ if kernel1x1 is None:
+ return 0
+ else:
+ return nn.functional.pad(kernel1x1, [1, 1, 1, 1])
+
+ def _fuse_bn_tensor(self, branch):
+ if branch is None:
+ return 0, 0
+ if isinstance(branch, nn.Sequential):
+ kernel = branch[0].weight
+ running_mean = branch[1].running_mean
+ running_var = branch[1].running_var
+ gamma = branch[1].weight
+ beta = branch[1].bias
+ eps = branch[1].eps
+ else:
+ assert isinstance(branch, nn.BatchNorm2d)
+ if not hasattr(self, "id_tensor"):
+ input_dim = self.in_channels // self.groups
+ kernel_value = np.zeros(
+ (self.in_channels, input_dim, 3, 3), dtype=np.float32
+ )
+ for i in range(self.in_channels):
+ kernel_value[i, i % input_dim, 1, 1] = 1
+ self.id_tensor = torch.from_numpy(kernel_value).to(branch.weight.device)
+ kernel = self.id_tensor
+ running_mean = branch.running_mean
+ running_var = branch.running_var
+ gamma = branch.weight
+ beta = branch.bias
+ eps = branch.eps
+ std = (running_var + eps).sqrt()
+ t = (gamma / std).reshape(-1, 1, 1, 1)
+ return kernel * t, beta - running_mean * gamma / std
+
+ def repvgg_convert(self):
+ kernel, bias = self.get_equivalent_kernel_bias()
+ return (
+ kernel.detach().cpu().numpy(),
+ bias.detach().cpu().numpy(),
+ )
+
+ def fuse_conv_bn(self, conv, bn):
+
+ std = (bn.running_var + bn.eps).sqrt()
+ bias = bn.bias - bn.running_mean * bn.weight / std
+
+ t = (bn.weight / std).reshape(-1, 1, 1, 1)
+ weights = conv.weight * t
+
+ bn = nn.Identity()
+ conv = nn.Conv2d(in_channels = conv.in_channels,
+ out_channels = conv.out_channels,
+ kernel_size = conv.kernel_size,
+ stride=conv.stride,
+ padding = conv.padding,
+ dilation = conv.dilation,
+ groups = conv.groups,
+ bias = True,
+ padding_mode = conv.padding_mode)
+
+ conv.weight = torch.nn.Parameter(weights)
+ conv.bias = torch.nn.Parameter(bias)
+ return conv
+
+ def fuse_repvgg_block(self):
+ if self.deploy:
+ return
+ print(f"RepConv.fuse_repvgg_block")
+
+ self.rbr_dense = self.fuse_conv_bn(self.rbr_dense[0], self.rbr_dense[1])
+
+ self.rbr_1x1 = self.fuse_conv_bn(self.rbr_1x1[0], self.rbr_1x1[1])
+ rbr_1x1_bias = self.rbr_1x1.bias
+ weight_1x1_expanded = torch.nn.functional.pad(self.rbr_1x1.weight, [1, 1, 1, 1])
+
+ # Fuse self.rbr_identity
+ if (isinstance(self.rbr_identity, nn.BatchNorm2d) or isinstance(self.rbr_identity, nn.modules.batchnorm.SyncBatchNorm)):
+ # print(f"fuse: rbr_identity == BatchNorm2d or SyncBatchNorm")
+ identity_conv_1x1 = nn.Conv2d(
+ in_channels=self.in_channels,
+ out_channels=self.out_channels,
+ kernel_size=1,
+ stride=1,
+ padding=0,
+ groups=self.groups,
+ bias=False)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.to(self.rbr_1x1.weight.data.device)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.squeeze().squeeze()
+ # print(f" identity_conv_1x1.weight = {identity_conv_1x1.weight.shape}")
+ identity_conv_1x1.weight.data.fill_(0.0)
+ identity_conv_1x1.weight.data.fill_diagonal_(1.0)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.unsqueeze(2).unsqueeze(3)
+ # print(f" identity_conv_1x1.weight = {identity_conv_1x1.weight.shape}")
+
+ identity_conv_1x1 = self.fuse_conv_bn(identity_conv_1x1, self.rbr_identity)
+ bias_identity_expanded = identity_conv_1x1.bias
+ weight_identity_expanded = torch.nn.functional.pad(identity_conv_1x1.weight, [1, 1, 1, 1])
+ else:
+ # print(f"fuse: rbr_identity != BatchNorm2d, rbr_identity = {self.rbr_identity}")
+ bias_identity_expanded = torch.nn.Parameter( torch.zeros_like(rbr_1x1_bias) )
+ weight_identity_expanded = torch.nn.Parameter( torch.zeros_like(weight_1x1_expanded) )
+
+
+ #print(f"self.rbr_1x1.weight = {self.rbr_1x1.weight.shape}, ")
+ #print(f"weight_1x1_expanded = {weight_1x1_expanded.shape}, ")
+ #print(f"self.rbr_dense.weight = {self.rbr_dense.weight.shape}, ")
+
+ self.rbr_dense.weight = torch.nn.Parameter(self.rbr_dense.weight + weight_1x1_expanded + weight_identity_expanded)
+ self.rbr_dense.bias = torch.nn.Parameter(self.rbr_dense.bias + rbr_1x1_bias + bias_identity_expanded)
+
+ self.rbr_reparam = self.rbr_dense
+ self.deploy = True
+
+ if self.rbr_identity is not None:
+ del self.rbr_identity
+ self.rbr_identity = None
+
+ if self.rbr_1x1 is not None:
+ del self.rbr_1x1
+ self.rbr_1x1 = None
+
+ if self.rbr_dense is not None:
+ del self.rbr_dense
+ self.rbr_dense = None
+
+
+class RepBottleneck(Bottleneck):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut=True, g=1, e=0.5)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c2, 3, 1, g=g)
+
+
+class RepBottleneckCSPA(BottleneckCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepBottleneckCSPB(BottleneckCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepBottleneckCSPC(BottleneckCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepRes(Res):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c_, 3, 1, g=g)
+
+
+class RepResCSPA(ResCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResCSPB(ResCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResCSPC(ResCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResX(ResX):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=32, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c_, 3, 1, g=g)
+
+
+class RepResXCSPA(ResXCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResXCSPB(ResXCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResXCSPC(ResXCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+##### end of repvgg #####
+
+
+##### transformer #####
+
+class TransformerLayer(nn.Module):
+ # Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance)
+ def __init__(self, c, num_heads):
+ super().__init__()
+ self.q = nn.Linear(c, c, bias=False)
+ self.k = nn.Linear(c, c, bias=False)
+ self.v = nn.Linear(c, c, bias=False)
+ self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads)
+ self.fc1 = nn.Linear(c, c, bias=False)
+ self.fc2 = nn.Linear(c, c, bias=False)
+
+ def forward(self, x):
+ x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x
+ x = self.fc2(self.fc1(x)) + x
+ return x
+
+
+class TransformerBlock(nn.Module):
+ # Vision Transformer https://arxiv.org/abs/2010.11929
+ def __init__(self, c1, c2, num_heads, num_layers):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+ self.linear = nn.Linear(c2, c2) # learnable position embedding
+ self.tr = nn.Sequential(*[TransformerLayer(c2, num_heads) for _ in range(num_layers)])
+ self.c2 = c2
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ b, _, w, h = x.shape
+ p = x.flatten(2)
+ p = p.unsqueeze(0)
+ p = p.transpose(0, 3)
+ p = p.squeeze(3)
+ e = self.linear(p)
+ x = p + e
+
+ x = self.tr(x)
+ x = x.unsqueeze(3)
+ x = x.transpose(0, 3)
+ x = x.reshape(b, self.c2, w, h)
+ return x
+
+##### end of transformer #####
+
+
+##### yolov5 #####
+
+class Focus(nn.Module):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Focus, self).__init__()
+ self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
+ # self.contract = Contract(gain=2)
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
+ # return self.conv(self.contract(x))
+
+
+class SPPF(nn.Module):
+ # Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
+ def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * 4, c2, 1, 1)
+ self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(torch.cat([x, y1, y2, self.m(y2)], 1))
+
+
+class Contract(nn.Module):
+ # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ N, C, H, W = x.size() # assert (H / s == 0) and (W / s == 0), 'Indivisible gain'
+ s = self.gain
+ x = x.view(N, C, H // s, s, W // s, s) # x(1,64,40,2,40,2)
+ x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
+ return x.view(N, C * s * s, H // s, W // s) # x(1,256,40,40)
+
+
+class Expand(nn.Module):
+ # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ N, C, H, W = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
+ s = self.gain
+ x = x.view(N, s, s, C // s ** 2, H, W) # x(1,2,2,16,80,80)
+ x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
+ return x.view(N, C // s ** 2, H * s, W * s) # x(1,16,160,160)
+
+
+class NMS(nn.Module):
+ # Non-Maximum Suppression (NMS) module
+ conf = 0.25 # confidence threshold
+ iou = 0.45 # IoU threshold
+ classes = None # (optional list) filter by class
+
+ def __init__(self):
+ super(NMS, self).__init__()
+
+ def forward(self, x):
+ return non_max_suppression(x[0], conf_thres=self.conf, iou_thres=self.iou, classes=self.classes)
+
+
+class autoShape(nn.Module):
+ # input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS
+ conf = 0.25 # NMS confidence threshold
+ iou = 0.45 # NMS IoU threshold
+ classes = None # (optional list) filter by class
+
+ def __init__(self, model):
+ super(autoShape, self).__init__()
+ self.model = model.eval()
+
+ def autoshape(self):
+ print('autoShape already enabled, skipping... ') # model already converted to model.autoshape()
+ return self
+
+ @torch.no_grad()
+ def forward(self, imgs, size=640, augment=False, profile=False):
+ # Inference from various sources. For height=640, width=1280, RGB images example inputs are:
+ # filename: imgs = 'data/samples/zidane.jpg'
+ # URI: = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/zidane.jpg'
+ # OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3)
+ # PIL: = Image.open('image.jpg') # HWC x(640,1280,3)
+ # numpy: = np.zeros((640,1280,3)) # HWC
+ # torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values)
+ # multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images
+
+ t = [time_synchronized()]
+ p = next(self.model.parameters()) # for device and type
+ if isinstance(imgs, torch.Tensor): # torch
+ with amp.autocast(enabled=p.device.type != 'cpu'):
+ return self.model(imgs.to(p.device).type_as(p), augment, profile) # inference
+
+ # Pre-process
+ n, imgs = (len(imgs), imgs) if isinstance(imgs, list) else (1, [imgs]) # number of images, list of images
+ shape0, shape1, files = [], [], [] # image and inference shapes, filenames
+ for i, im in enumerate(imgs):
+ f = f'image{i}' # filename
+ if isinstance(im, str): # filename or uri
+ im, f = np.asarray(Image.open(requests.get(im, stream=True).raw if im.startswith('http') else im)), im
+ elif isinstance(im, Image.Image): # PIL Image
+ im, f = np.asarray(im), getattr(im, 'filename', f) or f
+ files.append(Path(f).with_suffix('.jpg').name)
+ if im.shape[0] < 5: # image in CHW
+ im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1)
+ im = im[:, :, :3] if im.ndim == 3 else np.tile(im[:, :, None], 3) # enforce 3ch input
+ s = im.shape[:2] # HWC
+ shape0.append(s) # image shape
+ g = (size / max(s)) # gain
+ shape1.append([y * g for y in s])
+ imgs[i] = im # update
+ shape1 = [make_divisible(x, int(self.stride.max())) for x in np.stack(shape1, 0).max(0)] # inference shape
+ x = [letterbox(im, new_shape=shape1, auto=False)[0] for im in imgs] # pad
+ x = np.stack(x, 0) if n > 1 else x[0][None] # stack
+ x = np.ascontiguousarray(x.transpose((0, 3, 1, 2))) # BHWC to BCHW
+ x = torch.from_numpy(x).to(p.device).type_as(p) / 255. # uint8 to fp16/32
+ t.append(time_synchronized())
+
+ with amp.autocast(enabled=p.device.type != 'cpu'):
+ # Inference
+ y = self.model(x, augment, profile)[0] # forward
+ t.append(time_synchronized())
+
+ # Post-process
+ y = non_max_suppression(y, conf_thres=self.conf, iou_thres=self.iou, classes=self.classes) # NMS
+ for i in range(n):
+ scale_coords(shape1, y[i][:, :4], shape0[i])
+
+ t.append(time_synchronized())
+ return Detections(imgs, y, files, t, self.names, x.shape)
+
+
+class Detections:
+ # detections class for YOLOv5 inference results
+ def __init__(self, imgs, pred, files, times=None, names=None, shape=None):
+ super(Detections, self).__init__()
+ d = pred[0].device # device
+ gn = [torch.tensor([*[im.shape[i] for i in [1, 0, 1, 0]], 1., 1.], device=d) for im in imgs] # normalizations
+ self.imgs = imgs # list of images as numpy arrays
+ self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls)
+ self.names = names # class names
+ self.files = files # image filenames
+ self.xyxy = pred # xyxy pixels
+ self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels
+ self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized
+ self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized
+ self.n = len(self.pred) # number of images (batch size)
+ self.t = tuple((times[i + 1] - times[i]) * 1000 / self.n for i in range(3)) # timestamps (ms)
+ self.s = shape # inference BCHW shape
+
+ def display(self, pprint=False, show=False, save=False, render=False, save_dir=''):
+ colors = color_list()
+ for i, (img, pred) in enumerate(zip(self.imgs, self.pred)):
+ str = f'image {i + 1}/{len(self.pred)}: {img.shape[0]}x{img.shape[1]} '
+ if pred is not None:
+ for c in pred[:, -1].unique():
+ n = (pred[:, -1] == c).sum() # detections per class
+ str += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string
+ if show or save or render:
+ for *box, conf, cls in pred: # xyxy, confidence, class
+ label = f'{self.names[int(cls)]} {conf:.2f}'
+ plot_one_box(box, img, label=label, color=colors[int(cls) % 10])
+ img = Image.fromarray(img.astype(np.uint8)) if isinstance(img, np.ndarray) else img # from np
+ if pprint:
+ print(str.rstrip(', '))
+ if show:
+ img.show(self.files[i]) # show
+ if save:
+ f = self.files[i]
+ img.save(Path(save_dir) / f) # save
+ print(f"{'Saved' * (i == 0)} {f}", end=',' if i < self.n - 1 else f' to {save_dir}\n')
+ if render:
+ self.imgs[i] = np.asarray(img)
+
+ def print(self):
+ self.display(pprint=True) # print results
+ print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {tuple(self.s)}' % self.t)
+
+ def show(self):
+ self.display(show=True) # show results
+
+ def save(self, save_dir='runs/hub/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/hub/exp') # increment save_dir
+ Path(save_dir).mkdir(parents=True, exist_ok=True)
+ self.display(save=True, save_dir=save_dir) # save results
+
+ def render(self):
+ self.display(render=True) # render results
+ return self.imgs
+
+ def pandas(self):
+ # return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0])
+ new = copy(self) # return copy
+ ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns
+ cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns
+ for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]):
+ a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update
+ setattr(new, k, [pd.DataFrame(x, columns=c) for x in a])
+ return new
+
+ def tolist(self):
+ # return a list of Detections objects, i.e. 'for result in results.tolist():'
+ x = [Detections([self.imgs[i]], [self.pred[i]], self.names, self.s) for i in range(self.n)]
+ for d in x:
+ for k in ['imgs', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']:
+ setattr(d, k, getattr(d, k)[0]) # pop out of list
+ return x
+
+ def __len__(self):
+ return self.n
+
+
+class Classify(nn.Module):
+ # Classification head, i.e. x(b,c1,20,20) to x(b,c2)
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Classify, self).__init__()
+ self.aap = nn.AdaptiveAvgPool2d(1) # to x(b,c1,1,1)
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g) # to x(b,c2,1,1)
+ self.flat = nn.Flatten()
+
+ def forward(self, x):
+ z = torch.cat([self.aap(y) for y in (x if isinstance(x, list) else [x])], 1) # cat if list
+ return self.flat(self.conv(z)) # flatten to x(b,c2)
+
+##### end of yolov5 ######
+
+
+##### orepa #####
+
+def transI_fusebn(kernel, bn):
+ gamma = bn.weight
+ std = (bn.running_var + bn.eps).sqrt()
+ return kernel * ((gamma / std).reshape(-1, 1, 1, 1)), bn.bias - bn.running_mean * gamma / std
+
+
+class ConvBN(nn.Module):
+ def __init__(self, in_channels, out_channels, kernel_size,
+ stride=1, padding=0, dilation=1, groups=1, deploy=False, nonlinear=None):
+ super().__init__()
+ if nonlinear is None:
+ self.nonlinear = nn.Identity()
+ else:
+ self.nonlinear = nonlinear
+ if deploy:
+ self.conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
+ stride=stride, padding=padding, dilation=dilation, groups=groups, bias=True)
+ else:
+ self.conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
+ stride=stride, padding=padding, dilation=dilation, groups=groups, bias=False)
+ self.bn = nn.BatchNorm2d(num_features=out_channels)
+
+ def forward(self, x):
+ if hasattr(self, 'bn'):
+ return self.nonlinear(self.bn(self.conv(x)))
+ else:
+ return self.nonlinear(self.conv(x))
+
+ def switch_to_deploy(self):
+ kernel, bias = transI_fusebn(self.conv.weight, self.bn)
+ conv = nn.Conv2d(in_channels=self.conv.in_channels, out_channels=self.conv.out_channels, kernel_size=self.conv.kernel_size,
+ stride=self.conv.stride, padding=self.conv.padding, dilation=self.conv.dilation, groups=self.conv.groups, bias=True)
+ conv.weight.data = kernel
+ conv.bias.data = bias
+ for para in self.parameters():
+ para.detach_()
+ self.__delattr__('conv')
+ self.__delattr__('bn')
+ self.conv = conv
+
+class OREPA_3x3_RepConv(nn.Module):
+
+ def __init__(self, in_channels, out_channels, kernel_size,
+ stride=1, padding=0, dilation=1, groups=1,
+ internal_channels_1x1_3x3=None,
+ deploy=False, nonlinear=None, single_init=False):
+ super(OREPA_3x3_RepConv, self).__init__()
+ self.deploy = deploy
+
+ if nonlinear is None:
+ self.nonlinear = nn.Identity()
+ else:
+ self.nonlinear = nonlinear
+
+ self.kernel_size = kernel_size
+ self.in_channels = in_channels
+ self.out_channels = out_channels
+ self.groups = groups
+ assert padding == kernel_size // 2
+
+ self.stride = stride
+ self.padding = padding
+ self.dilation = dilation
+
+ self.branch_counter = 0
+
+ self.weight_rbr_origin = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), kernel_size, kernel_size))
+ nn.init.kaiming_uniform_(self.weight_rbr_origin, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+
+ if groups < out_channels:
+ self.weight_rbr_avg_conv = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), 1, 1))
+ self.weight_rbr_pfir_conv = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_avg_conv, a=1.0)
+ nn.init.kaiming_uniform_(self.weight_rbr_pfir_conv, a=1.0)
+ self.weight_rbr_avg_conv.data
+ self.weight_rbr_pfir_conv.data
+ self.register_buffer('weight_rbr_avg_avg', torch.ones(kernel_size, kernel_size).mul(1.0/kernel_size/kernel_size))
+ self.branch_counter += 1
+
+ else:
+ raise NotImplementedError
+ self.branch_counter += 1
+
+ if internal_channels_1x1_3x3 is None:
+ internal_channels_1x1_3x3 = in_channels if groups < out_channels else 2 * in_channels # For mobilenet, it is better to have 2X internal channels
+
+ if internal_channels_1x1_3x3 == in_channels:
+ self.weight_rbr_1x1_kxk_idconv1 = nn.Parameter(torch.zeros(in_channels, int(in_channels/self.groups), 1, 1))
+ id_value = np.zeros((in_channels, int(in_channels/self.groups), 1, 1))
+ for i in range(in_channels):
+ id_value[i, i % int(in_channels/self.groups), 0, 0] = 1
+ id_tensor = torch.from_numpy(id_value).type_as(self.weight_rbr_1x1_kxk_idconv1)
+ self.register_buffer('id_tensor', id_tensor)
+
+ else:
+ self.weight_rbr_1x1_kxk_conv1 = nn.Parameter(torch.Tensor(internal_channels_1x1_3x3, int(in_channels/self.groups), 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_1x1_kxk_conv1, a=math.sqrt(1.0))
+ self.weight_rbr_1x1_kxk_conv2 = nn.Parameter(torch.Tensor(out_channels, int(internal_channels_1x1_3x3/self.groups), kernel_size, kernel_size))
+ nn.init.kaiming_uniform_(self.weight_rbr_1x1_kxk_conv2, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+ expand_ratio = 8
+ self.weight_rbr_gconv_dw = nn.Parameter(torch.Tensor(in_channels*expand_ratio, 1, kernel_size, kernel_size))
+ self.weight_rbr_gconv_pw = nn.Parameter(torch.Tensor(out_channels, in_channels*expand_ratio, 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_gconv_dw, a=math.sqrt(1.0))
+ nn.init.kaiming_uniform_(self.weight_rbr_gconv_pw, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+ if out_channels == in_channels and stride == 1:
+ self.branch_counter += 1
+
+ self.vector = nn.Parameter(torch.Tensor(self.branch_counter, self.out_channels))
+ self.bn = nn.BatchNorm2d(out_channels)
+
+ self.fre_init()
+
+ nn.init.constant_(self.vector[0, :], 0.25) #origin
+ nn.init.constant_(self.vector[1, :], 0.25) #avg
+ nn.init.constant_(self.vector[2, :], 0.0) #prior
+ nn.init.constant_(self.vector[3, :], 0.5) #1x1_kxk
+ nn.init.constant_(self.vector[4, :], 0.5) #dws_conv
+
+
+ def fre_init(self):
+ prior_tensor = torch.Tensor(self.out_channels, self.kernel_size, self.kernel_size)
+ half_fg = self.out_channels/2
+ for i in range(self.out_channels):
+ for h in range(3):
+ for w in range(3):
+ if i < half_fg:
+ prior_tensor[i, h, w] = math.cos(math.pi*(h+0.5)*(i+1)/3)
+ else:
+ prior_tensor[i, h, w] = math.cos(math.pi*(w+0.5)*(i+1-half_fg)/3)
+
+ self.register_buffer('weight_rbr_prior', prior_tensor)
+
+ def weight_gen(self):
+
+ weight_rbr_origin = torch.einsum('oihw,o->oihw', self.weight_rbr_origin, self.vector[0, :])
+
+ weight_rbr_avg = torch.einsum('oihw,o->oihw', torch.einsum('oihw,hw->oihw', self.weight_rbr_avg_conv, self.weight_rbr_avg_avg), self.vector[1, :])
+
+ weight_rbr_pfir = torch.einsum('oihw,o->oihw', torch.einsum('oihw,ohw->oihw', self.weight_rbr_pfir_conv, self.weight_rbr_prior), self.vector[2, :])
+
+ weight_rbr_1x1_kxk_conv1 = None
+ if hasattr(self, 'weight_rbr_1x1_kxk_idconv1'):
+ weight_rbr_1x1_kxk_conv1 = (self.weight_rbr_1x1_kxk_idconv1 + self.id_tensor).squeeze()
+ elif hasattr(self, 'weight_rbr_1x1_kxk_conv1'):
+ weight_rbr_1x1_kxk_conv1 = self.weight_rbr_1x1_kxk_conv1.squeeze()
+ else:
+ raise NotImplementedError
+ weight_rbr_1x1_kxk_conv2 = self.weight_rbr_1x1_kxk_conv2
+
+ if self.groups > 1:
+ g = self.groups
+ t, ig = weight_rbr_1x1_kxk_conv1.size()
+ o, tg, h, w = weight_rbr_1x1_kxk_conv2.size()
+ weight_rbr_1x1_kxk_conv1 = weight_rbr_1x1_kxk_conv1.view(g, int(t/g), ig)
+ weight_rbr_1x1_kxk_conv2 = weight_rbr_1x1_kxk_conv2.view(g, int(o/g), tg, h, w)
+ weight_rbr_1x1_kxk = torch.einsum('gti,gothw->goihw', weight_rbr_1x1_kxk_conv1, weight_rbr_1x1_kxk_conv2).view(o, ig, h, w)
+ else:
+ weight_rbr_1x1_kxk = torch.einsum('ti,othw->oihw', weight_rbr_1x1_kxk_conv1, weight_rbr_1x1_kxk_conv2)
+
+ weight_rbr_1x1_kxk = torch.einsum('oihw,o->oihw', weight_rbr_1x1_kxk, self.vector[3, :])
+
+ weight_rbr_gconv = self.dwsc2full(self.weight_rbr_gconv_dw, self.weight_rbr_gconv_pw, self.in_channels)
+ weight_rbr_gconv = torch.einsum('oihw,o->oihw', weight_rbr_gconv, self.vector[4, :])
+
+ weight = weight_rbr_origin + weight_rbr_avg + weight_rbr_1x1_kxk + weight_rbr_pfir + weight_rbr_gconv
+
+ return weight
+
+ def dwsc2full(self, weight_dw, weight_pw, groups):
+
+ t, ig, h, w = weight_dw.size()
+ o, _, _, _ = weight_pw.size()
+ tg = int(t/groups)
+ i = int(ig*groups)
+ weight_dw = weight_dw.view(groups, tg, ig, h, w)
+ weight_pw = weight_pw.squeeze().view(o, groups, tg)
+
+ weight_dsc = torch.einsum('gtihw,ogt->ogihw', weight_dw, weight_pw)
+ return weight_dsc.view(o, i, h, w)
+
+ def forward(self, inputs):
+ weight = self.weight_gen()
+ out = F.conv2d(inputs, weight, bias=None, stride=self.stride, padding=self.padding, dilation=self.dilation, groups=self.groups)
+
+ return self.nonlinear(self.bn(out))
+
+class RepConv_OREPA(nn.Module):
+
+ def __init__(self, c1, c2, k=3, s=1, padding=1, dilation=1, groups=1, padding_mode='zeros', deploy=False, use_se=False, nonlinear=nn.SiLU()):
+ super(RepConv_OREPA, self).__init__()
+ self.deploy = deploy
+ self.groups = groups
+ self.in_channels = c1
+ self.out_channels = c2
+
+ self.padding = padding
+ self.dilation = dilation
+ self.groups = groups
+
+ assert k == 3
+ assert padding == 1
+
+ padding_11 = padding - k // 2
+
+ if nonlinear is None:
+ self.nonlinearity = nn.Identity()
+ else:
+ self.nonlinearity = nonlinear
+
+ if use_se:
+ self.se = SEBlock(self.out_channels, internal_neurons=self.out_channels // 16)
+ else:
+ self.se = nn.Identity()
+
+ if deploy:
+ self.rbr_reparam = nn.Conv2d(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=k, stride=s,
+ padding=padding, dilation=dilation, groups=groups, bias=True, padding_mode=padding_mode)
+
+ else:
+ self.rbr_identity = nn.BatchNorm2d(num_features=self.in_channels) if self.out_channels == self.in_channels and s == 1 else None
+ self.rbr_dense = OREPA_3x3_RepConv(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=k, stride=s, padding=padding, groups=groups, dilation=1)
+ self.rbr_1x1 = ConvBN(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=1, stride=s, padding=padding_11, groups=groups, dilation=1)
+ print('RepVGG Block, identity = ', self.rbr_identity)
+
+
+ def forward(self, inputs):
+ if hasattr(self, 'rbr_reparam'):
+ return self.nonlinearity(self.se(self.rbr_reparam(inputs)))
+
+ if self.rbr_identity is None:
+ id_out = 0
+ else:
+ id_out = self.rbr_identity(inputs)
+
+ out1 = self.rbr_dense(inputs)
+ out2 = self.rbr_1x1(inputs)
+ out3 = id_out
+ out = out1 + out2 + out3
+
+ return self.nonlinearity(self.se(out))
+
+
+ # Optional. This improves the accuracy and facilitates quantization.
+ # 1. Cancel the original weight decay on rbr_dense.conv.weight and rbr_1x1.conv.weight.
+ # 2. Use like this.
+ # loss = criterion(....)
+ # for every RepVGGBlock blk:
+ # loss += weight_decay_coefficient * 0.5 * blk.get_cust_L2()
+ # optimizer.zero_grad()
+ # loss.backward()
+
+ # Not used for OREPA
+ def get_custom_L2(self):
+ K3 = self.rbr_dense.weight_gen()
+ K1 = self.rbr_1x1.conv.weight
+ t3 = (self.rbr_dense.bn.weight / ((self.rbr_dense.bn.running_var + self.rbr_dense.bn.eps).sqrt())).reshape(-1, 1, 1, 1).detach()
+ t1 = (self.rbr_1x1.bn.weight / ((self.rbr_1x1.bn.running_var + self.rbr_1x1.bn.eps).sqrt())).reshape(-1, 1, 1, 1).detach()
+
+ l2_loss_circle = (K3 ** 2).sum() - (K3[:, :, 1:2, 1:2] ** 2).sum() # The L2 loss of the "circle" of weights in 3x3 kernel. Use regular L2 on them.
+ eq_kernel = K3[:, :, 1:2, 1:2] * t3 + K1 * t1 # The equivalent resultant central point of 3x3 kernel.
+ l2_loss_eq_kernel = (eq_kernel ** 2 / (t3 ** 2 + t1 ** 2)).sum() # Normalize for an L2 coefficient comparable to regular L2.
+ return l2_loss_eq_kernel + l2_loss_circle
+
+ def get_equivalent_kernel_bias(self):
+ kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense)
+ kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1)
+ kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity)
+ return kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1) + kernelid, bias3x3 + bias1x1 + biasid
+
+ def _pad_1x1_to_3x3_tensor(self, kernel1x1):
+ if kernel1x1 is None:
+ return 0
+ else:
+ return torch.nn.functional.pad(kernel1x1, [1,1,1,1])
+
+ def _fuse_bn_tensor(self, branch):
+ if branch is None:
+ return 0, 0
+ if not isinstance(branch, nn.BatchNorm2d):
+ if isinstance(branch, OREPA_3x3_RepConv):
+ kernel = branch.weight_gen()
+ elif isinstance(branch, ConvBN):
+ kernel = branch.conv.weight
+ else:
+ raise NotImplementedError
+ running_mean = branch.bn.running_mean
+ running_var = branch.bn.running_var
+ gamma = branch.bn.weight
+ beta = branch.bn.bias
+ eps = branch.bn.eps
+ else:
+ if not hasattr(self, 'id_tensor'):
+ input_dim = self.in_channels // self.groups
+ kernel_value = np.zeros((self.in_channels, input_dim, 3, 3), dtype=np.float32)
+ for i in range(self.in_channels):
+ kernel_value[i, i % input_dim, 1, 1] = 1
+ self.id_tensor = torch.from_numpy(kernel_value).to(branch.weight.device)
+ kernel = self.id_tensor
+ running_mean = branch.running_mean
+ running_var = branch.running_var
+ gamma = branch.weight
+ beta = branch.bias
+ eps = branch.eps
+ std = (running_var + eps).sqrt()
+ t = (gamma / std).reshape(-1, 1, 1, 1)
+ return kernel * t, beta - running_mean * gamma / std
+
+ def switch_to_deploy(self):
+ if hasattr(self, 'rbr_reparam'):
+ return
+ print(f"RepConv_OREPA.switch_to_deploy")
+ kernel, bias = self.get_equivalent_kernel_bias()
+ self.rbr_reparam = nn.Conv2d(in_channels=self.rbr_dense.in_channels, out_channels=self.rbr_dense.out_channels,
+ kernel_size=self.rbr_dense.kernel_size, stride=self.rbr_dense.stride,
+ padding=self.rbr_dense.padding, dilation=self.rbr_dense.dilation, groups=self.rbr_dense.groups, bias=True)
+ self.rbr_reparam.weight.data = kernel
+ self.rbr_reparam.bias.data = bias
+ for para in self.parameters():
+ para.detach_()
+ self.__delattr__('rbr_dense')
+ self.__delattr__('rbr_1x1')
+ if hasattr(self, 'rbr_identity'):
+ self.__delattr__('rbr_identity')
+
+##### end of orepa #####
+
+
+##### swin transformer #####
+
+class WindowAttention(nn.Module):
+
+ def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):
+
+ super().__init__()
+ self.dim = dim
+ self.window_size = window_size # Wh, Ww
+ self.num_heads = num_heads
+ head_dim = dim // num_heads
+ self.scale = qk_scale or head_dim ** -0.5
+
+ # define a parameter table of relative position bias
+ self.relative_position_bias_table = nn.Parameter(
+ torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nH
+
+ # get pair-wise relative position index for each token inside the window
+ coords_h = torch.arange(self.window_size[0])
+ coords_w = torch.arange(self.window_size[1])
+ coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
+ coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
+ relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
+ relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
+ relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
+ relative_coords[:, :, 1] += self.window_size[1] - 1
+ relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
+ relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
+ self.register_buffer("relative_position_index", relative_position_index)
+
+ self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
+ self.attn_drop = nn.Dropout(attn_drop)
+ self.proj = nn.Linear(dim, dim)
+ self.proj_drop = nn.Dropout(proj_drop)
+
+ nn.init.normal_(self.relative_position_bias_table, std=.02)
+ self.softmax = nn.Softmax(dim=-1)
+
+ def forward(self, x, mask=None):
+
+ B_, N, C = x.shape
+ qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
+ q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
+
+ q = q * self.scale
+ attn = (q @ k.transpose(-2, -1))
+
+ relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(
+ self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
+ relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
+ attn = attn + relative_position_bias.unsqueeze(0)
+
+ if mask is not None:
+ nW = mask.shape[0]
+ attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
+ attn = attn.view(-1, self.num_heads, N, N)
+ attn = self.softmax(attn)
+ else:
+ attn = self.softmax(attn)
+
+ attn = self.attn_drop(attn)
+
+ # print(attn.dtype, v.dtype)
+ try:
+ x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
+ except:
+ #print(attn.dtype, v.dtype)
+ x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)
+ x = self.proj(x)
+ x = self.proj_drop(x)
+ return x
+
+class Mlp(nn.Module):
+
+ def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):
+ super().__init__()
+ out_features = out_features or in_features
+ hidden_features = hidden_features or in_features
+ self.fc1 = nn.Linear(in_features, hidden_features)
+ self.act = act_layer()
+ self.fc2 = nn.Linear(hidden_features, out_features)
+ self.drop = nn.Dropout(drop)
+
+ def forward(self, x):
+ x = self.fc1(x)
+ x = self.act(x)
+ x = self.drop(x)
+ x = self.fc2(x)
+ x = self.drop(x)
+ return x
+
+def window_partition(x, window_size):
+
+ B, H, W, C = x.shape
+ assert H % window_size == 0, 'feature map h and w can not divide by window size'
+ x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
+ windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
+ return windows
+
+def window_reverse(windows, window_size, H, W):
+
+ B = int(windows.shape[0] / (H * W / window_size / window_size))
+ x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
+ x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
+ return x
+
+
+class SwinTransformerLayer(nn.Module):
+
+ def __init__(self, dim, num_heads, window_size=8, shift_size=0,
+ mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0.,
+ act_layer=nn.SiLU, norm_layer=nn.LayerNorm):
+ super().__init__()
+ self.dim = dim
+ self.num_heads = num_heads
+ self.window_size = window_size
+ self.shift_size = shift_size
+ self.mlp_ratio = mlp_ratio
+ # if min(self.input_resolution) <= self.window_size:
+ # # if window size is larger than input resolution, we don't partition windows
+ # self.shift_size = 0
+ # self.window_size = min(self.input_resolution)
+ assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
+
+ self.norm1 = norm_layer(dim)
+ self.attn = WindowAttention(
+ dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,
+ qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)
+
+ self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
+ self.norm2 = norm_layer(dim)
+ mlp_hidden_dim = int(dim * mlp_ratio)
+ self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
+
+ def create_mask(self, H, W):
+ # calculate attention mask for SW-MSA
+ img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
+ h_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ w_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ cnt = 0
+ for h in h_slices:
+ for w in w_slices:
+ img_mask[:, h, w, :] = cnt
+ cnt += 1
+
+ mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
+ mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
+ attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
+ attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
+
+ return attn_mask
+
+ def forward(self, x):
+ # reshape x[b c h w] to x[b l c]
+ _, _, H_, W_ = x.shape
+
+ Padding = False
+ if min(H_, W_) < self.window_size or H_ % self.window_size!=0 or W_ % self.window_size!=0:
+ Padding = True
+ # print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')
+ pad_r = (self.window_size - W_ % self.window_size) % self.window_size
+ pad_b = (self.window_size - H_ % self.window_size) % self.window_size
+ x = F.pad(x, (0, pad_r, 0, pad_b))
+
+ # print('2', x.shape)
+ B, C, H, W = x.shape
+ L = H * W
+ x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c
+
+ # create mask from init to forward
+ if self.shift_size > 0:
+ attn_mask = self.create_mask(H, W).to(x.device)
+ else:
+ attn_mask = None
+
+ shortcut = x
+ x = self.norm1(x)
+ x = x.view(B, H, W, C)
+
+ # cyclic shift
+ if self.shift_size > 0:
+ shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
+ else:
+ shifted_x = x
+
+ # partition windows
+ x_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, C
+ x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
+
+ # W-MSA/SW-MSA
+ attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C
+
+ # merge windows
+ attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
+ shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' C
+
+ # reverse cyclic shift
+ if self.shift_size > 0:
+ x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
+ else:
+ x = shifted_x
+ x = x.view(B, H * W, C)
+
+ # FFN
+ x = shortcut + self.drop_path(x)
+ x = x + self.drop_path(self.mlp(self.norm2(x)))
+
+ x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w
+
+ if Padding:
+ x = x[:, :, :H_, :W_] # reverse padding
+
+ return x
+
+
+class SwinTransformerBlock(nn.Module):
+ def __init__(self, c1, c2, num_heads, num_layers, window_size=8):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+
+ # remove input_resolution
+ self.blocks = nn.Sequential(*[SwinTransformerLayer(dim=c2, num_heads=num_heads, window_size=window_size,
+ shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)])
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ x = self.blocks(x)
+ return x
+
+
+class STCSPA(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class STCSPB(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class STCSPC(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+##### end of swin transformer #####
+
+
+##### swin transformer v2 #####
+
+class WindowAttention_v2(nn.Module):
+
+ def __init__(self, dim, window_size, num_heads, qkv_bias=True, attn_drop=0., proj_drop=0.,
+ pretrained_window_size=[0, 0]):
+
+ super().__init__()
+ self.dim = dim
+ self.window_size = window_size # Wh, Ww
+ self.pretrained_window_size = pretrained_window_size
+ self.num_heads = num_heads
+
+ self.logit_scale = nn.Parameter(torch.log(10 * torch.ones((num_heads, 1, 1))), requires_grad=True)
+
+ # mlp to generate continuous relative position bias
+ self.cpb_mlp = nn.Sequential(nn.Linear(2, 512, bias=True),
+ nn.ReLU(inplace=True),
+ nn.Linear(512, num_heads, bias=False))
+
+ # get relative_coords_table
+ relative_coords_h = torch.arange(-(self.window_size[0] - 1), self.window_size[0], dtype=torch.float32)
+ relative_coords_w = torch.arange(-(self.window_size[1] - 1), self.window_size[1], dtype=torch.float32)
+ relative_coords_table = torch.stack(
+ torch.meshgrid([relative_coords_h,
+ relative_coords_w])).permute(1, 2, 0).contiguous().unsqueeze(0) # 1, 2*Wh-1, 2*Ww-1, 2
+ if pretrained_window_size[0] > 0:
+ relative_coords_table[:, :, :, 0] /= (pretrained_window_size[0] - 1)
+ relative_coords_table[:, :, :, 1] /= (pretrained_window_size[1] - 1)
+ else:
+ relative_coords_table[:, :, :, 0] /= (self.window_size[0] - 1)
+ relative_coords_table[:, :, :, 1] /= (self.window_size[1] - 1)
+ relative_coords_table *= 8 # normalize to -8, 8
+ relative_coords_table = torch.sign(relative_coords_table) * torch.log2(
+ torch.abs(relative_coords_table) + 1.0) / np.log2(8)
+
+ self.register_buffer("relative_coords_table", relative_coords_table)
+
+ # get pair-wise relative position index for each token inside the window
+ coords_h = torch.arange(self.window_size[0])
+ coords_w = torch.arange(self.window_size[1])
+ coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
+ coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
+ relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
+ relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
+ relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
+ relative_coords[:, :, 1] += self.window_size[1] - 1
+ relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
+ relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
+ self.register_buffer("relative_position_index", relative_position_index)
+
+ self.qkv = nn.Linear(dim, dim * 3, bias=False)
+ if qkv_bias:
+ self.q_bias = nn.Parameter(torch.zeros(dim))
+ self.v_bias = nn.Parameter(torch.zeros(dim))
+ else:
+ self.q_bias = None
+ self.v_bias = None
+ self.attn_drop = nn.Dropout(attn_drop)
+ self.proj = nn.Linear(dim, dim)
+ self.proj_drop = nn.Dropout(proj_drop)
+ self.softmax = nn.Softmax(dim=-1)
+
+ def forward(self, x, mask=None):
+
+ B_, N, C = x.shape
+ qkv_bias = None
+ if self.q_bias is not None:
+ qkv_bias = torch.cat((self.q_bias, torch.zeros_like(self.v_bias, requires_grad=False), self.v_bias))
+ qkv = F.linear(input=x, weight=self.qkv.weight, bias=qkv_bias)
+ qkv = qkv.reshape(B_, N, 3, self.num_heads, -1).permute(2, 0, 3, 1, 4)
+ q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
+
+ # cosine attention
+ attn = (F.normalize(q, dim=-1) @ F.normalize(k, dim=-1).transpose(-2, -1))
+ logit_scale = torch.clamp(self.logit_scale, max=torch.log(torch.tensor(1. / 0.01))).exp()
+ attn = attn * logit_scale
+
+ relative_position_bias_table = self.cpb_mlp(self.relative_coords_table).view(-1, self.num_heads)
+ relative_position_bias = relative_position_bias_table[self.relative_position_index.view(-1)].view(
+ self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
+ relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
+ relative_position_bias = 16 * torch.sigmoid(relative_position_bias)
+ attn = attn + relative_position_bias.unsqueeze(0)
+
+ if mask is not None:
+ nW = mask.shape[0]
+ attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
+ attn = attn.view(-1, self.num_heads, N, N)
+ attn = self.softmax(attn)
+ else:
+ attn = self.softmax(attn)
+
+ attn = self.attn_drop(attn)
+
+ try:
+ x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
+ except:
+ x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)
+
+ x = self.proj(x)
+ x = self.proj_drop(x)
+ return x
+
+ def extra_repr(self) -> str:
+ return f'dim={self.dim}, window_size={self.window_size}, ' \
+ f'pretrained_window_size={self.pretrained_window_size}, num_heads={self.num_heads}'
+
+ def flops(self, N):
+ # calculate flops for 1 window with token length of N
+ flops = 0
+ # qkv = self.qkv(x)
+ flops += N * self.dim * 3 * self.dim
+ # attn = (q @ k.transpose(-2, -1))
+ flops += self.num_heads * N * (self.dim // self.num_heads) * N
+ # x = (attn @ v)
+ flops += self.num_heads * N * N * (self.dim // self.num_heads)
+ # x = self.proj(x)
+ flops += N * self.dim * self.dim
+ return flops
+
+class Mlp_v2(nn.Module):
+ def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):
+ super().__init__()
+ out_features = out_features or in_features
+ hidden_features = hidden_features or in_features
+ self.fc1 = nn.Linear(in_features, hidden_features)
+ self.act = act_layer()
+ self.fc2 = nn.Linear(hidden_features, out_features)
+ self.drop = nn.Dropout(drop)
+
+ def forward(self, x):
+ x = self.fc1(x)
+ x = self.act(x)
+ x = self.drop(x)
+ x = self.fc2(x)
+ x = self.drop(x)
+ return x
+
+
+def window_partition_v2(x, window_size):
+
+ B, H, W, C = x.shape
+ x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
+ windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
+ return windows
+
+
+def window_reverse_v2(windows, window_size, H, W):
+
+ B = int(windows.shape[0] / (H * W / window_size / window_size))
+ x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
+ x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
+ return x
+
+
+class SwinTransformerLayer_v2(nn.Module):
+
+ def __init__(self, dim, num_heads, window_size=7, shift_size=0,
+ mlp_ratio=4., qkv_bias=True, drop=0., attn_drop=0., drop_path=0.,
+ act_layer=nn.SiLU, norm_layer=nn.LayerNorm, pretrained_window_size=0):
+ super().__init__()
+ self.dim = dim
+ #self.input_resolution = input_resolution
+ self.num_heads = num_heads
+ self.window_size = window_size
+ self.shift_size = shift_size
+ self.mlp_ratio = mlp_ratio
+ #if min(self.input_resolution) <= self.window_size:
+ # # if window size is larger than input resolution, we don't partition windows
+ # self.shift_size = 0
+ # self.window_size = min(self.input_resolution)
+ assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
+
+ self.norm1 = norm_layer(dim)
+ self.attn = WindowAttention_v2(
+ dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,
+ qkv_bias=qkv_bias, attn_drop=attn_drop, proj_drop=drop,
+ pretrained_window_size=(pretrained_window_size, pretrained_window_size))
+
+ self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
+ self.norm2 = norm_layer(dim)
+ mlp_hidden_dim = int(dim * mlp_ratio)
+ self.mlp = Mlp_v2(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
+
+ def create_mask(self, H, W):
+ # calculate attention mask for SW-MSA
+ img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
+ h_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ w_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ cnt = 0
+ for h in h_slices:
+ for w in w_slices:
+ img_mask[:, h, w, :] = cnt
+ cnt += 1
+
+ mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
+ mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
+ attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
+ attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
+
+ return attn_mask
+
+ def forward(self, x):
+ # reshape x[b c h w] to x[b l c]
+ _, _, H_, W_ = x.shape
+
+ Padding = False
+ if min(H_, W_) < self.window_size or H_ % self.window_size!=0 or W_ % self.window_size!=0:
+ Padding = True
+ # print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')
+ pad_r = (self.window_size - W_ % self.window_size) % self.window_size
+ pad_b = (self.window_size - H_ % self.window_size) % self.window_size
+ x = F.pad(x, (0, pad_r, 0, pad_b))
+
+ # print('2', x.shape)
+ B, C, H, W = x.shape
+ L = H * W
+ x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c
+
+ # create mask from init to forward
+ if self.shift_size > 0:
+ attn_mask = self.create_mask(H, W).to(x.device)
+ else:
+ attn_mask = None
+
+ shortcut = x
+ x = x.view(B, H, W, C)
+
+ # cyclic shift
+ if self.shift_size > 0:
+ shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
+ else:
+ shifted_x = x
+
+ # partition windows
+ x_windows = window_partition_v2(shifted_x, self.window_size) # nW*B, window_size, window_size, C
+ x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
+
+ # W-MSA/SW-MSA
+ attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C
+
+ # merge windows
+ attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
+ shifted_x = window_reverse_v2(attn_windows, self.window_size, H, W) # B H' W' C
+
+ # reverse cyclic shift
+ if self.shift_size > 0:
+ x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
+ else:
+ x = shifted_x
+ x = x.view(B, H * W, C)
+ x = shortcut + self.drop_path(self.norm1(x))
+
+ # FFN
+ x = x + self.drop_path(self.norm2(self.mlp(x)))
+ x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w
+
+ if Padding:
+ x = x[:, :, :H_, :W_] # reverse padding
+
+ return x
+
+ def extra_repr(self) -> str:
+ return f"dim={self.dim}, input_resolution={self.input_resolution}, num_heads={self.num_heads}, " \
+ f"window_size={self.window_size}, shift_size={self.shift_size}, mlp_ratio={self.mlp_ratio}"
+
+ def flops(self):
+ flops = 0
+ H, W = self.input_resolution
+ # norm1
+ flops += self.dim * H * W
+ # W-MSA/SW-MSA
+ nW = H * W / self.window_size / self.window_size
+ flops += nW * self.attn.flops(self.window_size * self.window_size)
+ # mlp
+ flops += 2 * H * W * self.dim * self.dim * self.mlp_ratio
+ # norm2
+ flops += self.dim * H * W
+ return flops
+
+
+class SwinTransformer2Block(nn.Module):
+ def __init__(self, c1, c2, num_heads, num_layers, window_size=7):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+
+ # remove input_resolution
+ self.blocks = nn.Sequential(*[SwinTransformerLayer_v2(dim=c2, num_heads=num_heads, window_size=window_size,
+ shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)])
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ x = self.blocks(x)
+ return x
+
+
+class ST2CSPA(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class ST2CSPB(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class ST2CSPC(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+##### end of swin transformer v2 #####
diff --git a/ipex/models/experimental.py b/ipex/models/experimental.py
new file mode 100644
index 000000000..735d7aa0e
--- /dev/null
+++ b/ipex/models/experimental.py
@@ -0,0 +1,272 @@
+import numpy as np
+import random
+import torch
+import torch.nn as nn
+
+from models.common import Conv, DWConv
+from utils.google_utils import attempt_download
+
+
+class CrossConv(nn.Module):
+ # Cross Convolution Downsample
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False):
+ # ch_in, ch_out, kernel, stride, groups, expansion, shortcut
+ super(CrossConv, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, (1, k), (1, s))
+ self.cv2 = Conv(c_, c2, (k, 1), (s, 1), g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class Sum(nn.Module):
+ # Weighted sum of 2 or more layers https://arxiv.org/abs/1911.09070
+ def __init__(self, n, weight=False): # n: number of inputs
+ super(Sum, self).__init__()
+ self.weight = weight # apply weights boolean
+ self.iter = range(n - 1) # iter object
+ if weight:
+ self.w = nn.Parameter(-torch.arange(1., n) / 2, requires_grad=True) # layer weights
+
+ def forward(self, x):
+ y = x[0] # no weight
+ if self.weight:
+ w = torch.sigmoid(self.w) * 2
+ for i in self.iter:
+ y = y + x[i + 1] * w[i]
+ else:
+ for i in self.iter:
+ y = y + x[i + 1]
+ return y
+
+
+class MixConv2d(nn.Module):
+ # Mixed Depthwise Conv https://arxiv.org/abs/1907.09595
+ def __init__(self, c1, c2, k=(1, 3), s=1, equal_ch=True):
+ super(MixConv2d, self).__init__()
+ groups = len(k)
+ if equal_ch: # equal c_ per group
+ i = torch.linspace(0, groups - 1E-6, c2).floor() # c2 indices
+ c_ = [(i == g).sum() for g in range(groups)] # intermediate channels
+ else: # equal weight.numel() per group
+ b = [c2] + [0] * groups
+ a = np.eye(groups + 1, groups, k=-1)
+ a -= np.roll(a, 1, axis=1)
+ a *= np.array(k) ** 2
+ a[0] = 1
+ c_ = np.linalg.lstsq(a, b, rcond=None)[0].round() # solve for equal weight indices, ax = b
+
+ self.m = nn.ModuleList([nn.Conv2d(c1, int(c_[g]), k[g], s, k[g] // 2, bias=False) for g in range(groups)])
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.LeakyReLU(0.1, inplace=True)
+
+ def forward(self, x):
+ return x + self.act(self.bn(torch.cat([m(x) for m in self.m], 1)))
+
+
+class Ensemble(nn.ModuleList):
+ # Ensemble of models
+ def __init__(self):
+ super(Ensemble, self).__init__()
+
+ def forward(self, x, augment=False):
+ y = []
+ for module in self:
+ y.append(module(x, augment)[0])
+ # y = torch.stack(y).max(0)[0] # max ensemble
+ # y = torch.stack(y).mean(0) # mean ensemble
+ y = torch.cat(y, 1) # nms ensemble
+ return y, None # inference, train output
+
+
+
+
+
+class ORT_NMS(torch.autograd.Function):
+ '''ONNX-Runtime NMS operation'''
+ @staticmethod
+ def forward(ctx,
+ boxes,
+ scores,
+ max_output_boxes_per_class=torch.tensor([100]),
+ iou_threshold=torch.tensor([0.45]),
+ score_threshold=torch.tensor([0.25])):
+ device = boxes.device
+ batch = scores.shape[0]
+ num_det = random.randint(0, 100)
+ batches = torch.randint(0, batch, (num_det,)).sort()[0].to(device)
+ idxs = torch.arange(100, 100 + num_det).to(device)
+ zeros = torch.zeros((num_det,), dtype=torch.int64).to(device)
+ selected_indices = torch.cat([batches[None], zeros[None], idxs[None]], 0).T.contiguous()
+ selected_indices = selected_indices.to(torch.int64)
+ return selected_indices
+
+ @staticmethod
+ def symbolic(g, boxes, scores, max_output_boxes_per_class, iou_threshold, score_threshold):
+ return g.op("NonMaxSuppression", boxes, scores, max_output_boxes_per_class, iou_threshold, score_threshold)
+
+
+class TRT_NMS(torch.autograd.Function):
+ '''TensorRT NMS operation'''
+ @staticmethod
+ def forward(
+ ctx,
+ boxes,
+ scores,
+ background_class=-1,
+ box_coding=1,
+ iou_threshold=0.45,
+ max_output_boxes=100,
+ plugin_version="1",
+ score_activation=0,
+ score_threshold=0.25,
+ ):
+ batch_size, num_boxes, num_classes = scores.shape
+ num_det = torch.randint(0, max_output_boxes, (batch_size, 1), dtype=torch.int32)
+ det_boxes = torch.randn(batch_size, max_output_boxes, 4)
+ det_scores = torch.randn(batch_size, max_output_boxes)
+ det_classes = torch.randint(0, num_classes, (batch_size, max_output_boxes), dtype=torch.int32)
+ return num_det, det_boxes, det_scores, det_classes
+
+ @staticmethod
+ def symbolic(g,
+ boxes,
+ scores,
+ background_class=-1,
+ box_coding=1,
+ iou_threshold=0.45,
+ max_output_boxes=100,
+ plugin_version="1",
+ score_activation=0,
+ score_threshold=0.25):
+ out = g.op("TRT::EfficientNMS_TRT",
+ boxes,
+ scores,
+ background_class_i=background_class,
+ box_coding_i=box_coding,
+ iou_threshold_f=iou_threshold,
+ max_output_boxes_i=max_output_boxes,
+ plugin_version_s=plugin_version,
+ score_activation_i=score_activation,
+ score_threshold_f=score_threshold,
+ outputs=4)
+ nums, boxes, scores, classes = out
+ return nums, boxes, scores, classes
+
+
+class ONNX_ORT(nn.Module):
+ '''onnx module with ONNX-Runtime NMS operation.'''
+ def __init__(self, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=640, device=None, n_classes=80):
+ super().__init__()
+ self.device = device if device else torch.device("cpu")
+ self.max_obj = torch.tensor([max_obj]).to(device)
+ self.iou_threshold = torch.tensor([iou_thres]).to(device)
+ self.score_threshold = torch.tensor([score_thres]).to(device)
+ self.max_wh = max_wh # if max_wh != 0 : non-agnostic else : agnostic
+ self.convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=self.device)
+ self.n_classes=n_classes
+
+ def forward(self, x):
+ boxes = x[:, :, :4]
+ conf = x[:, :, 4:5]
+ scores = x[:, :, 5:]
+ if self.n_classes == 1:
+ scores = conf # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ scores *= conf # conf = obj_conf * cls_conf
+ boxes @= self.convert_matrix
+ max_score, category_id = scores.max(2, keepdim=True)
+ dis = category_id.float() * self.max_wh
+ nmsbox = boxes + dis
+ max_score_tp = max_score.transpose(1, 2).contiguous()
+ selected_indices = ORT_NMS.apply(nmsbox, max_score_tp, self.max_obj, self.iou_threshold, self.score_threshold)
+ X, Y = selected_indices[:, 0], selected_indices[:, 2]
+ selected_boxes = boxes[X, Y, :]
+ selected_categories = category_id[X, Y, :].float()
+ selected_scores = max_score[X, Y, :]
+ X = X.unsqueeze(1).float()
+ return torch.cat([X, selected_boxes, selected_categories, selected_scores], 1)
+
+class ONNX_TRT(nn.Module):
+ '''onnx module with TensorRT NMS operation.'''
+ def __init__(self, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=None ,device=None, n_classes=80):
+ super().__init__()
+ assert max_wh is None
+ self.device = device if device else torch.device('cpu')
+ self.background_class = -1,
+ self.box_coding = 1,
+ self.iou_threshold = iou_thres
+ self.max_obj = max_obj
+ self.plugin_version = '1'
+ self.score_activation = 0
+ self.score_threshold = score_thres
+ self.n_classes=n_classes
+
+ def forward(self, x):
+ boxes = x[:, :, :4]
+ conf = x[:, :, 4:5]
+ scores = x[:, :, 5:]
+ if self.n_classes == 1:
+ scores = conf # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ scores *= conf # conf = obj_conf * cls_conf
+ num_det, det_boxes, det_scores, det_classes = TRT_NMS.apply(boxes, scores, self.background_class, self.box_coding,
+ self.iou_threshold, self.max_obj,
+ self.plugin_version, self.score_activation,
+ self.score_threshold)
+ return num_det, det_boxes, det_scores, det_classes
+
+
+class End2End(nn.Module):
+ '''export onnx or tensorrt model with NMS operation.'''
+ def __init__(self, model, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=None, device=None, n_classes=80):
+ super().__init__()
+ device = device if device else torch.device('cpu')
+ assert isinstance(max_wh,(int)) or max_wh is None
+ self.model = model.to(device)
+ self.model.model[-1].end2end = True
+ self.patch_model = ONNX_TRT if max_wh is None else ONNX_ORT
+ self.end2end = self.patch_model(max_obj, iou_thres, score_thres, max_wh, device, n_classes)
+ self.end2end.eval()
+
+ def forward(self, x):
+ x = self.model(x)
+ x = self.end2end(x)
+ return x
+
+
+
+
+
+def attempt_load(weights, map_location=None):
+ # Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a
+ model = Ensemble()
+ for w in weights if isinstance(weights, list) else [weights]:
+ attempt_download(w)
+ ckpt = torch.load(w, map_location=map_location) # load
+ model.append(ckpt['ema' if ckpt.get('ema') else 'model'].float().fuse().eval()) # FP32 model
+
+ # Compatibility updates
+ for m in model.modules():
+ if type(m) in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
+ m.inplace = True # pytorch 1.7.0 compatibility
+ elif type(m) is nn.Upsample:
+ m.recompute_scale_factor = None # torch 1.11.0 compatibility
+ elif type(m) is Conv:
+ m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatibility
+
+ if len(model) == 1:
+ return model[-1] # return model
+ else:
+ print('Ensemble created with %s\n' % weights)
+ for k in ['names', 'stride']:
+ setattr(model, k, getattr(model[-1], k))
+ return model # return ensemble
+
+
diff --git a/ipex/models/yolo.py b/ipex/models/yolo.py
new file mode 100644
index 000000000..95a019c6a
--- /dev/null
+++ b/ipex/models/yolo.py
@@ -0,0 +1,843 @@
+import argparse
+import logging
+import sys
+from copy import deepcopy
+
+sys.path.append('./') # to run '$ python *.py' files in subdirectories
+logger = logging.getLogger(__name__)
+import torch
+from models.common import *
+from models.experimental import *
+from utils.autoanchor import check_anchor_order
+from utils.general import make_divisible, check_file, set_logging
+from utils.torch_utils import time_synchronized, fuse_conv_and_bn, model_info, scale_img, initialize_weights, \
+ select_device, copy_attr
+from utils.loss import SigmoidBin
+
+try:
+ import thop # for FLOPS computation
+except ImportError:
+ thop = None
+
+
+class Detect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(Detect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IDetect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(IDetect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ def fuseforward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ def fuse(self):
+ print("IDetect.fuse")
+ # fuse ImplicitA and Convolution
+ for i in range(len(self.m)):
+ c1,c2,_,_ = self.m[i].weight.shape
+ c1_,c2_, _,_ = self.ia[i].implicit.shape
+ self.m[i].bias += torch.matmul(self.m[i].weight.reshape(c1,c2),self.ia[i].implicit.reshape(c2_,c1_)).squeeze(1)
+
+ # fuse ImplicitM and Convolution
+ for i in range(len(self.m)):
+ c1,c2, _,_ = self.im[i].implicit.shape
+ self.m[i].bias *= self.im[i].implicit.reshape(c2)
+ self.m[i].weight *= self.im[i].implicit.transpose(0,1)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IKeypoint(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, nc=80, anchors=(), nkpt=17, ch=(), inplace=True, dw_conv_kpt=False): # detection layer
+ super(IKeypoint, self).__init__()
+ self.nc = nc # number of classes
+ self.nkpt = nkpt
+ self.dw_conv_kpt = dw_conv_kpt
+ self.no_det=(nc + 5) # number of outputs per anchor for box and class
+ self.no_kpt = 3*self.nkpt ## number of outputs per anchor for keypoints
+ self.no = self.no_det+self.no_kpt
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ self.flip_test = False
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no_det * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no_det * self.na) for _ in ch)
+
+ if self.nkpt is not None:
+ if self.dw_conv_kpt: #keypoint head is slightly more complex
+ self.m_kpt = nn.ModuleList(
+ nn.Sequential(DWConv(x, x, k=3), Conv(x,x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), Conv(x,x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), nn.Conv2d(x, self.no_kpt * self.na, 1)) for x in ch)
+ else: #keypoint head is a single convolution
+ self.m_kpt = nn.ModuleList(nn.Conv2d(x, self.no_kpt * self.na, 1) for x in ch)
+
+ self.inplace = inplace # use in-place ops (e.g. slice assignment)
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ if self.nkpt is None or self.nkpt==0:
+ x[i] = self.im[i](self.m[i](self.ia[i](x[i]))) # conv
+ else :
+ x[i] = torch.cat((self.im[i](self.m[i](self.ia[i](x[i]))), self.m_kpt[i](x[i])), axis=1)
+
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+ x_det = x[i][..., :6]
+ x_kpt = x[i][..., 6:]
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+ kpt_grid_x = self.grid[i][..., 0:1]
+ kpt_grid_y = self.grid[i][..., 1:2]
+
+ if self.nkpt == 0:
+ y = x[i].sigmoid()
+ else:
+ y = x_det.sigmoid()
+
+ if self.inplace:
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i].view(1, self.na, 1, 1, 2) # wh
+ if self.nkpt != 0:
+ x_kpt[..., 0::3] = (x_kpt[..., ::3] * 2. - 0.5 + kpt_grid_x.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ x_kpt[..., 1::3] = (x_kpt[..., 1::3] * 2. - 0.5 + kpt_grid_y.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #x_kpt[..., 0::3] = (x_kpt[..., ::3] + kpt_grid_x.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = (x_kpt[..., 1::3] + kpt_grid_y.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #print('=============')
+ #print(self.anchor_grid[i].shape)
+ #print(self.anchor_grid[i][...,0].unsqueeze(4).shape)
+ #print(x_kpt[..., 0::3].shape)
+ #x_kpt[..., 0::3] = ((x_kpt[..., 0::3].tanh() * 2.) ** 3 * self.anchor_grid[i][...,0].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_x.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = ((x_kpt[..., 1::3].tanh() * 2.) ** 3 * self.anchor_grid[i][...,1].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_y.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 0::3] = (((x_kpt[..., 0::3].sigmoid() * 4.) ** 2 - 8.) * self.anchor_grid[i][...,0].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_x.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = (((x_kpt[..., 1::3].sigmoid() * 4.) ** 2 - 8.) * self.anchor_grid[i][...,1].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_y.repeat(1,1,1,1,17) * self.stride[i] # xy
+ x_kpt[..., 2::3] = x_kpt[..., 2::3].sigmoid()
+
+ y = torch.cat((xy, wh, y[..., 4:], x_kpt), dim = -1)
+
+ else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ if self.nkpt != 0:
+ y[..., 6:] = (y[..., 6:] * 2. - 0.5 + self.grid[i].repeat((1,1,1,1,self.nkpt))) * self.stride[i] # xy
+ y = torch.cat((xy, wh, y[..., 4:]), -1)
+
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+
+class IAuxDetect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(IAuxDetect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[:self.nl]) # output conv
+ self.m2 = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[self.nl:]) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch[:self.nl])
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch[:self.nl])
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ x[i+self.nl] = self.m2[i](x[i+self.nl])
+ x[i+self.nl] = x[i+self.nl].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x[:self.nl])
+
+ def fuseforward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i].data # wh
+ y = torch.cat((xy, wh, y[..., 4:]), -1)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ def fuse(self):
+ print("IAuxDetect.fuse")
+ # fuse ImplicitA and Convolution
+ for i in range(len(self.m)):
+ c1,c2,_,_ = self.m[i].weight.shape
+ c1_,c2_, _,_ = self.ia[i].implicit.shape
+ self.m[i].bias += torch.matmul(self.m[i].weight.reshape(c1,c2),self.ia[i].implicit.reshape(c2_,c1_)).squeeze(1)
+
+ # fuse ImplicitM and Convolution
+ for i in range(len(self.m)):
+ c1,c2, _,_ = self.im[i].implicit.shape
+ self.m[i].bias *= self.im[i].implicit.reshape(c2)
+ self.m[i].weight *= self.im[i].implicit.transpose(0,1)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IBin(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, nc=80, anchors=(), ch=(), bin_count=21): # detection layer
+ super(IBin, self).__init__()
+ self.nc = nc # number of classes
+ self.bin_count = bin_count
+
+ self.w_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0)
+ self.h_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0)
+ # classes, x,y,obj
+ self.no = nc + 3 + \
+ self.w_bin_sigmoid.get_length() + self.h_bin_sigmoid.get_length() # w-bce, h-bce
+ # + self.x_bin_sigmoid.get_length() + self.y_bin_sigmoid.get_length()
+
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
+
+ def forward(self, x):
+
+ #self.x_bin_sigmoid.use_fw_regression = True
+ #self.y_bin_sigmoid.use_fw_regression = True
+ self.w_bin_sigmoid.use_fw_regression = True
+ self.h_bin_sigmoid.use_fw_regression = True
+
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ #y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+
+
+ #px = (self.x_bin_sigmoid.forward(y[..., 0:12]) + self.grid[i][..., 0]) * self.stride[i]
+ #py = (self.y_bin_sigmoid.forward(y[..., 12:24]) + self.grid[i][..., 1]) * self.stride[i]
+
+ pw = self.w_bin_sigmoid.forward(y[..., 2:24]) * self.anchor_grid[i][..., 0]
+ ph = self.h_bin_sigmoid.forward(y[..., 24:46]) * self.anchor_grid[i][..., 1]
+
+ #y[..., 0] = px
+ #y[..., 1] = py
+ y[..., 2] = pw
+ y[..., 3] = ph
+
+ y = torch.cat((y[..., 0:4], y[..., 46:]), dim=-1)
+
+ z.append(y.view(bs, -1, y.shape[-1]))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+
+class Model(nn.Module):
+ def __init__(self, cfg='yolor-csp-c.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classes
+ super(Model, self).__init__()
+ self.traced = False
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg) as f:
+ self.yaml = yaml.load(f, Loader=yaml.SafeLoader) # model dict
+
+ # Define model
+ ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels
+ if nc and nc != self.yaml['nc']:
+ logger.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ if anchors:
+ logger.info(f'Overriding model.yaml anchors with anchors={anchors}')
+ self.yaml['anchors'] = round(anchors) # override yaml value
+ self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist
+ self.names = [str(i) for i in range(self.yaml['nc'])] # default names
+ # print([x.shape for x in self.forward(torch.zeros(1, ch, 64, 64))])
+
+ # Build strides, anchors
+ m = self.model[-1] # Detect()
+ if isinstance(m, Detect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IDetect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IAuxDetect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))[:4]]) # forward
+ #print(m.stride)
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_aux_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IBin):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases_bin() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IKeypoint):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases_kpt() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+
+ # Init weights, biases
+ initialize_weights(self)
+ self.info()
+ logger.info('')
+
+ def forward(self, x, augment=False, profile=False):
+ if augment:
+ img_size = x.shape[-2:] # height, width
+ s = [1, 0.83, 0.67] # scales
+ f = [None, 3, None] # flips (2-ud, 3-lr)
+ y = [] # outputs
+ for si, fi in zip(s, f):
+ xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
+ yi = self.forward_once(xi)[0] # forward
+ # cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # save
+ yi[..., :4] /= si # de-scale
+ if fi == 2:
+ yi[..., 1] = img_size[0] - yi[..., 1] # de-flip ud
+ elif fi == 3:
+ yi[..., 0] = img_size[1] - yi[..., 0] # de-flip lr
+ y.append(yi)
+ return torch.cat(y, 1), None # augmented inference, train
+ else:
+ return self.forward_once(x, profile) # single-scale inference, train
+
+ def forward_once(self, x, profile=False):
+ y, dt = [], [] # outputs
+ for m in self.model:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+
+ if not hasattr(self, 'traced'):
+ self.traced=False
+
+ if self.traced:
+ if isinstance(m, Detect) or isinstance(m, IDetect) or isinstance(m, IAuxDetect) or isinstance(m, IKeypoint):
+ break
+
+ if profile:
+ c = isinstance(m, (Detect, IDetect, IAuxDetect, IBin))
+ o = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPS
+ for _ in range(10):
+ m(x.copy() if c else x)
+ t = time_synchronized()
+ for _ in range(10):
+ m(x.copy() if c else x)
+ dt.append((time_synchronized() - t) * 100)
+ print('%10.1f%10.0f%10.1fms %-40s' % (o, m.np, dt[-1], m.type))
+
+ x = m(x) # run
+
+ y.append(x if m.i in self.save else None) # save output
+
+ if profile:
+ print('%.1fms total' % sum(dt))
+ return x
+
+ def _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _initialize_aux_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, mi2, s in zip(m.m, m.m2, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+ b2 = mi2.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b2.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b2.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi2.bias = torch.nn.Parameter(b2.view(-1), requires_grad=True)
+
+ def _initialize_biases_bin(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Bin() module
+ bc = m.bin_count
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ old = b[:, (0,1,2,bc+3)].data
+ obj_idx = 2*bc+4
+ b[:, :obj_idx].data += math.log(0.6 / (bc + 1 - 0.99))
+ b[:, obj_idx].data += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b[:, (obj_idx+1):].data += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ b[:, (0,1,2,bc+3)].data = old
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _initialize_biases_kpt(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _print_biases(self):
+ m = self.model[-1] # Detect() module
+ for mi in m.m: # from
+ b = mi.bias.detach().view(m.na, -1).T # conv.bias(255) to (3,85)
+ print(('%6g Conv2d.bias:' + '%10.3g' * 6) % (mi.weight.shape[1], *b[:5].mean(1).tolist(), b[5:].mean()))
+
+ # def _print_weights(self):
+ # for m in self.model.modules():
+ # if type(m) is Bottleneck:
+ # print('%10.3g' % (m.w.detach().sigmoid() * 2)) # shortcut weights
+
+ def fuse(self): # fuse model Conv2d() + BatchNorm2d() layers
+ print('Fusing layers... ')
+ for m in self.model.modules():
+ if isinstance(m, RepConv):
+ #print(f" fuse_repvgg_block")
+ m.fuse_repvgg_block()
+ elif isinstance(m, RepConv_OREPA):
+ #print(f" switch_to_deploy")
+ m.switch_to_deploy()
+ elif type(m) is Conv and hasattr(m, 'bn'):
+ m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
+ delattr(m, 'bn') # remove batchnorm
+ m.forward = m.fuseforward # update forward
+ elif isinstance(m, (IDetect, IAuxDetect)):
+ m.fuse()
+ m.forward = m.fuseforward
+ self.info()
+ return self
+
+ def nms(self, mode=True): # add or remove NMS module
+ present = type(self.model[-1]) is NMS # last layer is NMS
+ if mode and not present:
+ print('Adding NMS... ')
+ m = NMS() # module
+ m.f = -1 # from
+ m.i = self.model[-1].i + 1 # index
+ self.model.add_module(name='%s' % m.i, module=m) # add
+ self.eval()
+ elif not mode and present:
+ print('Removing NMS... ')
+ self.model = self.model[:-1] # remove
+ return self
+
+ def autoshape(self): # add autoShape module
+ print('Adding autoShape... ')
+ m = autoShape(self) # wrap model
+ copy_attr(m, self, include=('yaml', 'nc', 'hyp', 'names', 'stride'), exclude=()) # copy attributes
+ return m
+
+ def info(self, verbose=False, img_size=640): # print model information
+ model_info(self, verbose, img_size)
+
+
+def parse_model(d, ch): # model_dict, input_channels(3)
+ logger.info('\n%3s%18s%3s%10s %-40s%-30s' % ('', 'from', 'n', 'params', 'module', 'arguments'))
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ try:
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+ except:
+ pass
+
+ n = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in [nn.Conv2d, Conv, RobustConv, RobustConv2, DWConv, GhostConv, RepConv, RepConv_OREPA, DownC,
+ SPP, SPPF, SPPCSPC, GhostSPPCSPC, MixConv2d, Focus, Stem, GhostStem, CrossConv,
+ Bottleneck, BottleneckCSPA, BottleneckCSPB, BottleneckCSPC,
+ RepBottleneck, RepBottleneckCSPA, RepBottleneckCSPB, RepBottleneckCSPC,
+ Res, ResCSPA, ResCSPB, ResCSPC,
+ RepRes, RepResCSPA, RepResCSPB, RepResCSPC,
+ ResX, ResXCSPA, ResXCSPB, ResXCSPC,
+ RepResX, RepResXCSPA, RepResXCSPB, RepResXCSPC,
+ Ghost, GhostCSPA, GhostCSPB, GhostCSPC,
+ SwinTransformerBlock, STCSPA, STCSPB, STCSPC,
+ SwinTransformer2Block, ST2CSPA, ST2CSPB, ST2CSPC]:
+ c1, c2 = ch[f], args[0]
+ if c2 != no: # if not output
+ c2 = make_divisible(c2 * gw, 8)
+
+ args = [c1, c2, *args[1:]]
+ if m in [DownC, SPPCSPC, GhostSPPCSPC,
+ BottleneckCSPA, BottleneckCSPB, BottleneckCSPC,
+ RepBottleneckCSPA, RepBottleneckCSPB, RepBottleneckCSPC,
+ ResCSPA, ResCSPB, ResCSPC,
+ RepResCSPA, RepResCSPB, RepResCSPC,
+ ResXCSPA, ResXCSPB, ResXCSPC,
+ RepResXCSPA, RepResXCSPB, RepResXCSPC,
+ GhostCSPA, GhostCSPB, GhostCSPC,
+ STCSPA, STCSPB, STCSPC,
+ ST2CSPA, ST2CSPB, ST2CSPC]:
+ args.insert(2, n) # number of repeats
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum([ch[x] for x in f])
+ elif m is Chuncat:
+ c2 = sum([ch[x] for x in f])
+ elif m is Shortcut:
+ c2 = ch[f[0]]
+ elif m is Foldcut:
+ c2 = ch[f] // 2
+ elif m in [Detect, IDetect, IAuxDetect, IBin, IKeypoint]:
+ args.append([ch[x] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ elif m is ReOrg:
+ c2 = ch[f] * 4
+ elif m is Contract:
+ c2 = ch[f] * args[0] ** 2
+ elif m is Expand:
+ c2 = ch[f] // args[0] ** 2
+ else:
+ c2 = ch[f]
+
+ m_ = nn.Sequential(*[m(*args) for _ in range(n)]) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum([x.numel() for x in m_.parameters()]) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ logger.info('%3s%18s%3s%10.0f %-40s%-30s' % (i, f, n, np, t, args)) # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ if i == 0:
+ ch = []
+ ch.append(c2)
+ return nn.Sequential(*layers), sorted(save)
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--cfg', type=str, default='yolor-csp-c.yaml', help='model.yaml')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--profile', action='store_true', help='profile model speed')
+ opt = parser.parse_args()
+ opt.cfg = check_file(opt.cfg) # check file
+ set_logging()
+ device = select_device(opt.device)
+
+ # Create model
+ model = Model(opt.cfg).to(device)
+ model.train()
+
+ if opt.profile:
+ img = torch.rand(1, 3, 640, 640).to(device)
+ y = model(img, profile=True)
+
+ # Profile
+ # img = torch.rand(8 if torch.cuda.is_available() else 1, 3, 640, 640).to(device)
+ # y = model(img, profile=True)
+
+ # Tensorboard
+ # from torch.utils.tensorboard import SummaryWriter
+ # tb_writer = SummaryWriter()
+ # print("Run 'tensorboard --logdir=models/runs' to view tensorboard at http://localhost:6006/")
+ # tb_writer.add_graph(model.model, img) # add model to tensorboard
+ # tb_writer.add_image('test', img[0], dataformats='CWH') # add model to tensorboard
diff --git a/ipex/readme.md b/ipex/readme.md
new file mode 100644
index 000000000..d40491d69
--- /dev/null
+++ b/ipex/readme.md
@@ -0,0 +1,12 @@
+## Yolov7 Model Training with IPEX
+
+### Software/Hardware Requirements
+- Linux OS or Docker Image on Windows ```docker pull intel/intel-optimized-pytorch:latest```
+- Install PyTorch CPU ```python -m pip install torch torchvision```
+- Install IPEX (Same version as PyTorch) ``` python -m pip install intel_extension_for_pytorch -f https://developer.intel.com/ipex-whl-stable-cpu ```
+
+### Training
+- ``` python train.py --workers 8 --device cpu --batch-size 32 --epoch 10 --data data/custom_data.yaml --hyp data/hyp.scratch.custom.yaml --img 640 640 --cfg cfg/training/yolov7-custom.yaml --weights yolov7.pt --name yolov7-custom ```
+
+### Inference
+- ``` python detect.py --weights yolov7.pt --conf 0.25 --img-size 640 --source oneAPI_ODAV_APP/TEST_VIDEO/Visual_Pollution.mp4 ```
diff --git a/ipex/runs/train/yolov7-custom7/results.txt b/ipex/runs/train/yolov7-custom7/results.txt
new file mode 100644
index 000000000..11a1c5060
--- /dev/null
+++ b/ipex/runs/train/yolov7-custom7/results.txt
@@ -0,0 +1,10 @@
+ 0/9 0G 0.08749 0.02737 0 0.1149 3 640 0.136 0.02222 0.004218 0.0004348 0.1039 0.03473 0
+ 1/9 0G 0.07856 0.0267 0 0.1053 19 640 0.0152 0.04444 0.001015 0.0002046 0.103 0.03495 0
+ 2/9 0G 0.07321 0.02398 0 0.09719 23 640 0.01298 0.04444 0.0008594 0.0001339 0.1026 0.03469 0
+ 3/9 0G 0.08233 0.03481 0 0.1171 24 640 0.00792 0.06667 0.0008041 0.0002188 0.1022 0.0343 0
+ 4/9 0G 0.05996 0.02523 0 0.08519 20 640 0.00774 0.06667 0.0006951 0.0002562 0.1018 0.03392 0
+ 5/9 0G 0.08193 0.03098 0 0.1129 47 640 0.07318 0.04444 0.005737 0.0006422 0.1002 0.03431 0
+ 6/9 0G 0.08353 0.0305 0 0.114 75 640 0.04974 0.04444 0.004354 0.0008798 0.09944 0.03438 0
+ 7/9 0G 0.07434 0.03067 0 0.105 37 640 0.02766 0.04444 0.002986 0.0007926 0.09849 0.03404 0
+ 8/9 0G 0.08333 0.02946 0 0.1128 15 640 0.02147 0.04444 0.002092 0.0004805 0.09806 0.03375 0
+ 9/9 0G 0.07272 0.02863 0 0.1013 26 640 0.02289 0.04444 0.002083 0.0005383 0.09782 0.03363 0
diff --git a/ipex/scripts/get_coco.sh b/ipex/scripts/get_coco.sh
new file mode 100644
index 000000000..524f8dd9e
--- /dev/null
+++ b/ipex/scripts/get_coco.sh
@@ -0,0 +1,22 @@
+#!/bin/bash
+# COCO 2017 dataset http://cocodataset.org
+# Download command: bash ./scripts/get_coco.sh
+
+# Download/unzip labels
+d='./' # unzip directory
+url=https://github.com/ultralytics/yolov5/releases/download/v1.0/
+f='coco2017labels-segments.zip' # or 'coco2017labels.zip', 68 MB
+echo 'Downloading' $url$f ' ...'
+curl -L $url$f -o $f && unzip -q $f -d $d && rm $f & # download, unzip, remove in background
+
+# Download/unzip images
+d='./coco/images' # unzip directory
+url=http://images.cocodataset.org/zips/
+f1='train2017.zip' # 19G, 118k images
+f2='val2017.zip' # 1G, 5k images
+f3='test2017.zip' # 7G, 41k images (optional)
+for f in $f1 $f2 $f3; do
+ echo 'Downloading' $url$f '...'
+ curl -L $url$f -o $f && unzip -q $f -d $d && rm $f & # download, unzip, remove in background
+done
+wait # finish background tasks
diff --git a/ipex/seg/LICENSE b/ipex/seg/LICENSE
new file mode 100644
index 000000000..92b370f0e
--- /dev/null
+++ b/ipex/seg/LICENSE
@@ -0,0 +1,674 @@
+GNU GENERAL PUBLIC LICENSE
+ Version 3, 29 June 2007
+
+ Copyright (C) 2007 Free Software Foundation, Inc.
+ Everyone is permitted to copy and distribute verbatim copies
+ of this license document, but changing it is not allowed.
+
+ Preamble
+
+ The GNU General Public License is a free, copyleft license for
+software and other kinds of works.
+
+ The licenses for most software and other practical works are designed
+to take away your freedom to share and change the works. By contrast,
+the GNU General Public License is intended to guarantee your freedom to
+share and change all versions of a program--to make sure it remains free
+software for all its users. We, the Free Software Foundation, use the
+GNU General Public License for most of our software; it applies also to
+any other work released this way by its authors. You can apply it to
+your programs, too.
+
+ When we speak of free software, we are referring to freedom, not
+price. Our General Public Licenses are designed to make sure that you
+have the freedom to distribute copies of free software (and charge for
+them if you wish), that you receive source code or can get it if you
+want it, that you can change the software or use pieces of it in new
+free programs, and that you know you can do these things.
+
+ To protect your rights, we need to prevent others from denying you
+these rights or asking you to surrender the rights. Therefore, you have
+certain responsibilities if you distribute copies of the software, or if
+you modify it: responsibilities to respect the freedom of others.
+
+ For example, if you distribute copies of such a program, whether
+gratis or for a fee, you must pass on to the recipients the same
+freedoms that you received. You must make sure that they, too, receive
+or can get the source code. And you must show them these terms so they
+know their rights.
+
+ Developers that use the GNU GPL protect your rights with two steps:
+(1) assert copyright on the software, and (2) offer you this License
+giving you legal permission to copy, distribute and/or modify it.
+
+ For the developers' and authors' protection, the GPL clearly explains
+that there is no warranty for this free software. For both users' and
+authors' sake, the GPL requires that modified versions be marked as
+changed, so that their problems will not be attributed erroneously to
+authors of previous versions.
+
+ Some devices are designed to deny users access to install or run
+modified versions of the software inside them, although the manufacturer
+can do so. This is fundamentally incompatible with the aim of
+protecting users' freedom to change the software. The systematic
+pattern of such abuse occurs in the area of products for individuals to
+use, which is precisely where it is most unacceptable. Therefore, we
+have designed this version of the GPL to prohibit the practice for those
+products. If such problems arise substantially in other domains, we
+stand ready to extend this provision to those domains in future versions
+of the GPL, as needed to protect the freedom of users.
+
+ Finally, every program is threatened constantly by software patents.
+States should not allow patents to restrict development and use of
+software on general-purpose computers, but in those that do, we wish to
+avoid the special danger that patents applied to a free program could
+make it effectively proprietary. To prevent this, the GPL assures that
+patents cannot be used to render the program non-free.
+
+ The precise terms and conditions for copying, distribution and
+modification follow.
+
+ TERMS AND CONDITIONS
+
+ 0. Definitions.
+
+ "This License" refers to version 3 of the GNU General Public License.
+
+ "Copyright" also means copyright-like laws that apply to other kinds of
+works, such as semiconductor masks.
+
+ "The Program" refers to any copyrightable work licensed under this
+License. Each licensee is addressed as "you". "Licensees" and
+"recipients" may be individuals or organizations.
+
+ To "modify" a work means to copy from or adapt all or part of the work
+in a fashion requiring copyright permission, other than the making of an
+exact copy. The resulting work is called a "modified version" of the
+earlier work or a work "based on" the earlier work.
+
+ A "covered work" means either the unmodified Program or a work based
+on the Program.
+
+ To "propagate" a work means to do anything with it that, without
+permission, would make you directly or secondarily liable for
+infringement under applicable copyright law, except executing it on a
+computer or modifying a private copy. Propagation includes copying,
+distribution (with or without modification), making available to the
+public, and in some countries other activities as well.
+
+ To "convey" a work means any kind of propagation that enables other
+parties to make or receive copies. Mere interaction with a user through
+a computer network, with no transfer of a copy, is not conveying.
+
+ An interactive user interface displays "Appropriate Legal Notices"
+to the extent that it includes a convenient and prominently visible
+feature that (1) displays an appropriate copyright notice, and (2)
+tells the user that there is no warranty for the work (except to the
+extent that warranties are provided), that licensees may convey the
+work under this License, and how to view a copy of this License. If
+the interface presents a list of user commands or options, such as a
+menu, a prominent item in the list meets this criterion.
+
+ 1. Source Code.
+
+ The "source code" for a work means the preferred form of the work
+for making modifications to it. "Object code" means any non-source
+form of a work.
+
+ A "Standard Interface" means an interface that either is an official
+standard defined by a recognized standards body, or, in the case of
+interfaces specified for a particular programming language, one that
+is widely used among developers working in that language.
+
+ The "System Libraries" of an executable work include anything, other
+than the work as a whole, that (a) is included in the normal form of
+packaging a Major Component, but which is not part of that Major
+Component, and (b) serves only to enable use of the work with that
+Major Component, or to implement a Standard Interface for which an
+implementation is available to the public in source code form. A
+"Major Component", in this context, means a major essential component
+(kernel, window system, and so on) of the specific operating system
+(if any) on which the executable work runs, or a compiler used to
+produce the work, or an object code interpreter used to run it.
+
+ The "Corresponding Source" for a work in object code form means all
+the source code needed to generate, install, and (for an executable
+work) run the object code and to modify the work, including scripts to
+control those activities. However, it does not include the work's
+System Libraries, or general-purpose tools or generally available free
+programs which are used unmodified in performing those activities but
+which are not part of the work. For example, Corresponding Source
+includes interface definition files associated with source files for
+the work, and the source code for shared libraries and dynamically
+linked subprograms that the work is specifically designed to require,
+such as by intimate data communication or control flow between those
+subprograms and other parts of the work.
+
+ The Corresponding Source need not include anything that users
+can regenerate automatically from other parts of the Corresponding
+Source.
+
+ The Corresponding Source for a work in source code form is that
+same work.
+
+ 2. Basic Permissions.
+
+ All rights granted under this License are granted for the term of
+copyright on the Program, and are irrevocable provided the stated
+conditions are met. This License explicitly affirms your unlimited
+permission to run the unmodified Program. The output from running a
+covered work is covered by this License only if the output, given its
+content, constitutes a covered work. This License acknowledges your
+rights of fair use or other equivalent, as provided by copyright law.
+
+ You may make, run and propagate covered works that you do not
+convey, without conditions so long as your license otherwise remains
+in force. You may convey covered works to others for the sole purpose
+of having them make modifications exclusively for you, or provide you
+with facilities for running those works, provided that you comply with
+the terms of this License in conveying all material for which you do
+not control copyright. Those thus making or running the covered works
+for you must do so exclusively on your behalf, under your direction
+and control, on terms that prohibit them from making any copies of
+your copyrighted material outside their relationship with you.
+
+ Conveying under any other circumstances is permitted solely under
+the conditions stated below. Sublicensing is not allowed; section 10
+makes it unnecessary.
+
+ 3. Protecting Users' Legal Rights From Anti-Circumvention Law.
+
+ No covered work shall be deemed part of an effective technological
+measure under any applicable law fulfilling obligations under article
+11 of the WIPO copyright treaty adopted on 20 December 1996, or
+similar laws prohibiting or restricting circumvention of such
+measures.
+
+ When you convey a covered work, you waive any legal power to forbid
+circumvention of technological measures to the extent such circumvention
+is effected by exercising rights under this License with respect to
+the covered work, and you disclaim any intention to limit operation or
+modification of the work as a means of enforcing, against the work's
+users, your or third parties' legal rights to forbid circumvention of
+technological measures.
+
+ 4. Conveying Verbatim Copies.
+
+ You may convey verbatim copies of the Program's source code as you
+receive it, in any medium, provided that you conspicuously and
+appropriately publish on each copy an appropriate copyright notice;
+keep intact all notices stating that this License and any
+non-permissive terms added in accord with section 7 apply to the code;
+keep intact all notices of the absence of any warranty; and give all
+recipients a copy of this License along with the Program.
+
+ You may charge any price or no price for each copy that you convey,
+and you may offer support or warranty protection for a fee.
+
+ 5. Conveying Modified Source Versions.
+
+ You may convey a work based on the Program, or the modifications to
+produce it from the Program, in the form of source code under the
+terms of section 4, provided that you also meet all of these conditions:
+
+ a) The work must carry prominent notices stating that you modified
+ it, and giving a relevant date.
+
+ b) The work must carry prominent notices stating that it is
+ released under this License and any conditions added under section
+ 7. This requirement modifies the requirement in section 4 to
+ "keep intact all notices".
+
+ c) You must license the entire work, as a whole, under this
+ License to anyone who comes into possession of a copy. This
+ License will therefore apply, along with any applicable section 7
+ additional terms, to the whole of the work, and all its parts,
+ regardless of how they are packaged. This License gives no
+ permission to license the work in any other way, but it does not
+ invalidate such permission if you have separately received it.
+
+ d) If the work has interactive user interfaces, each must display
+ Appropriate Legal Notices; however, if the Program has interactive
+ interfaces that do not display Appropriate Legal Notices, your
+ work need not make them do so.
+
+ A compilation of a covered work with other separate and independent
+works, which are not by their nature extensions of the covered work,
+and which are not combined with it such as to form a larger program,
+in or on a volume of a storage or distribution medium, is called an
+"aggregate" if the compilation and its resulting copyright are not
+used to limit the access or legal rights of the compilation's users
+beyond what the individual works permit. Inclusion of a covered work
+in an aggregate does not cause this License to apply to the other
+parts of the aggregate.
+
+ 6. Conveying Non-Source Forms.
+
+ You may convey a covered work in object code form under the terms
+of sections 4 and 5, provided that you also convey the
+machine-readable Corresponding Source under the terms of this License,
+in one of these ways:
+
+ a) Convey the object code in, or embodied in, a physical product
+ (including a physical distribution medium), accompanied by the
+ Corresponding Source fixed on a durable physical medium
+ customarily used for software interchange.
+
+ b) Convey the object code in, or embodied in, a physical product
+ (including a physical distribution medium), accompanied by a
+ written offer, valid for at least three years and valid for as
+ long as you offer spare parts or customer support for that product
+ model, to give anyone who possesses the object code either (1) a
+ copy of the Corresponding Source for all the software in the
+ product that is covered by this License, on a durable physical
+ medium customarily used for software interchange, for a price no
+ more than your reasonable cost of physically performing this
+ conveying of source, or (2) access to copy the
+ Corresponding Source from a network server at no charge.
+
+ c) Convey individual copies of the object code with a copy of the
+ written offer to provide the Corresponding Source. This
+ alternative is allowed only occasionally and noncommercially, and
+ only if you received the object code with such an offer, in accord
+ with subsection 6b.
+
+ d) Convey the object code by offering access from a designated
+ place (gratis or for a charge), and offer equivalent access to the
+ Corresponding Source in the same way through the same place at no
+ further charge. You need not require recipients to copy the
+ Corresponding Source along with the object code. If the place to
+ copy the object code is a network server, the Corresponding Source
+ may be on a different server (operated by you or a third party)
+ that supports equivalent copying facilities, provided you maintain
+ clear directions next to the object code saying where to find the
+ Corresponding Source. Regardless of what server hosts the
+ Corresponding Source, you remain obligated to ensure that it is
+ available for as long as needed to satisfy these requirements.
+
+ e) Convey the object code using peer-to-peer transmission, provided
+ you inform other peers where the object code and Corresponding
+ Source of the work are being offered to the general public at no
+ charge under subsection 6d.
+
+ A separable portion of the object code, whose source code is excluded
+from the Corresponding Source as a System Library, need not be
+included in conveying the object code work.
+
+ A "User Product" is either (1) a "consumer product", which means any
+tangible personal property which is normally used for personal, family,
+or household purposes, or (2) anything designed or sold for incorporation
+into a dwelling. In determining whether a product is a consumer product,
+doubtful cases shall be resolved in favor of coverage. For a particular
+product received by a particular user, "normally used" refers to a
+typical or common use of that class of product, regardless of the status
+of the particular user or of the way in which the particular user
+actually uses, or expects or is expected to use, the product. A product
+is a consumer product regardless of whether the product has substantial
+commercial, industrial or non-consumer uses, unless such uses represent
+the only significant mode of use of the product.
+
+ "Installation Information" for a User Product means any methods,
+procedures, authorization keys, or other information required to install
+and execute modified versions of a covered work in that User Product from
+a modified version of its Corresponding Source. The information must
+suffice to ensure that the continued functioning of the modified object
+code is in no case prevented or interfered with solely because
+modification has been made.
+
+ If you convey an object code work under this section in, or with, or
+specifically for use in, a User Product, and the conveying occurs as
+part of a transaction in which the right of possession and use of the
+User Product is transferred to the recipient in perpetuity or for a
+fixed term (regardless of how the transaction is characterized), the
+Corresponding Source conveyed under this section must be accompanied
+by the Installation Information. But this requirement does not apply
+if neither you nor any third party retains the ability to install
+modified object code on the User Product (for example, the work has
+been installed in ROM).
+
+ The requirement to provide Installation Information does not include a
+requirement to continue to provide support service, warranty, or updates
+for a work that has been modified or installed by the recipient, or for
+the User Product in which it has been modified or installed. Access to a
+network may be denied when the modification itself materially and
+adversely affects the operation of the network or violates the rules and
+protocols for communication across the network.
+
+ Corresponding Source conveyed, and Installation Information provided,
+in accord with this section must be in a format that is publicly
+documented (and with an implementation available to the public in
+source code form), and must require no special password or key for
+unpacking, reading or copying.
+
+ 7. Additional Terms.
+
+ "Additional permissions" are terms that supplement the terms of this
+License by making exceptions from one or more of its conditions.
+Additional permissions that are applicable to the entire Program shall
+be treated as though they were included in this License, to the extent
+that they are valid under applicable law. If additional permissions
+apply only to part of the Program, that part may be used separately
+under those permissions, but the entire Program remains governed by
+this License without regard to the additional permissions.
+
+ When you convey a copy of a covered work, you may at your option
+remove any additional permissions from that copy, or from any part of
+it. (Additional permissions may be written to require their own
+removal in certain cases when you modify the work.) You may place
+additional permissions on material, added by you to a covered work,
+for which you have or can give appropriate copyright permission.
+
+ Notwithstanding any other provision of this License, for material you
+add to a covered work, you may (if authorized by the copyright holders of
+that material) supplement the terms of this License with terms:
+
+ a) Disclaiming warranty or limiting liability differently from the
+ terms of sections 15 and 16 of this License; or
+
+ b) Requiring preservation of specified reasonable legal notices or
+ author attributions in that material or in the Appropriate Legal
+ Notices displayed by works containing it; or
+
+ c) Prohibiting misrepresentation of the origin of that material, or
+ requiring that modified versions of such material be marked in
+ reasonable ways as different from the original version; or
+
+ d) Limiting the use for publicity purposes of names of licensors or
+ authors of the material; or
+
+ e) Declining to grant rights under trademark law for use of some
+ trade names, trademarks, or service marks; or
+
+ f) Requiring indemnification of licensors and authors of that
+ material by anyone who conveys the material (or modified versions of
+ it) with contractual assumptions of liability to the recipient, for
+ any liability that these contractual assumptions directly impose on
+ those licensors and authors.
+
+ All other non-permissive additional terms are considered "further
+restrictions" within the meaning of section 10. If the Program as you
+received it, or any part of it, contains a notice stating that it is
+governed by this License along with a term that is a further
+restriction, you may remove that term. If a license document contains
+a further restriction but permits relicensing or conveying under this
+License, you may add to a covered work material governed by the terms
+of that license document, provided that the further restriction does
+not survive such relicensing or conveying.
+
+ If you add terms to a covered work in accord with this section, you
+must place, in the relevant source files, a statement of the
+additional terms that apply to those files, or a notice indicating
+where to find the applicable terms.
+
+ Additional terms, permissive or non-permissive, may be stated in the
+form of a separately written license, or stated as exceptions;
+the above requirements apply either way.
+
+ 8. Termination.
+
+ You may not propagate or modify a covered work except as expressly
+provided under this License. Any attempt otherwise to propagate or
+modify it is void, and will automatically terminate your rights under
+this License (including any patent licenses granted under the third
+paragraph of section 11).
+
+ However, if you cease all violation of this License, then your
+license from a particular copyright holder is reinstated (a)
+provisionally, unless and until the copyright holder explicitly and
+finally terminates your license, and (b) permanently, if the copyright
+holder fails to notify you of the violation by some reasonable means
+prior to 60 days after the cessation.
+
+ Moreover, your license from a particular copyright holder is
+reinstated permanently if the copyright holder notifies you of the
+violation by some reasonable means, this is the first time you have
+received notice of violation of this License (for any work) from that
+copyright holder, and you cure the violation prior to 30 days after
+your receipt of the notice.
+
+ Termination of your rights under this section does not terminate the
+licenses of parties who have received copies or rights from you under
+this License. If your rights have been terminated and not permanently
+reinstated, you do not qualify to receive new licenses for the same
+material under section 10.
+
+ 9. Acceptance Not Required for Having Copies.
+
+ You are not required to accept this License in order to receive or
+run a copy of the Program. Ancillary propagation of a covered work
+occurring solely as a consequence of using peer-to-peer transmission
+to receive a copy likewise does not require acceptance. However,
+nothing other than this License grants you permission to propagate or
+modify any covered work. These actions infringe copyright if you do
+not accept this License. Therefore, by modifying or propagating a
+covered work, you indicate your acceptance of this License to do so.
+
+ 10. Automatic Licensing of Downstream Recipients.
+
+ Each time you convey a covered work, the recipient automatically
+receives a license from the original licensors, to run, modify and
+propagate that work, subject to this License. You are not responsible
+for enforcing compliance by third parties with this License.
+
+ An "entity transaction" is a transaction transferring control of an
+organization, or substantially all assets of one, or subdividing an
+organization, or merging organizations. If propagation of a covered
+work results from an entity transaction, each party to that
+transaction who receives a copy of the work also receives whatever
+licenses to the work the party's predecessor in interest had or could
+give under the previous paragraph, plus a right to possession of the
+Corresponding Source of the work from the predecessor in interest, if
+the predecessor has it or can get it with reasonable efforts.
+
+ You may not impose any further restrictions on the exercise of the
+rights granted or affirmed under this License. For example, you may
+not impose a license fee, royalty, or other charge for exercise of
+rights granted under this License, and you may not initiate litigation
+(including a cross-claim or counterclaim in a lawsuit) alleging that
+any patent claim is infringed by making, using, selling, offering for
+sale, or importing the Program or any portion of it.
+
+ 11. Patents.
+
+ A "contributor" is a copyright holder who authorizes use under this
+License of the Program or a work on which the Program is based. The
+work thus licensed is called the contributor's "contributor version".
+
+ A contributor's "essential patent claims" are all patent claims
+owned or controlled by the contributor, whether already acquired or
+hereafter acquired, that would be infringed by some manner, permitted
+by this License, of making, using, or selling its contributor version,
+but do not include claims that would be infringed only as a
+consequence of further modification of the contributor version. For
+purposes of this definition, "control" includes the right to grant
+patent sublicenses in a manner consistent with the requirements of
+this License.
+
+ Each contributor grants you a non-exclusive, worldwide, royalty-free
+patent license under the contributor's essential patent claims, to
+make, use, sell, offer for sale, import and otherwise run, modify and
+propagate the contents of its contributor version.
+
+ In the following three paragraphs, a "patent license" is any express
+agreement or commitment, however denominated, not to enforce a patent
+(such as an express permission to practice a patent or covenant not to
+sue for patent infringement). To "grant" such a patent license to a
+party means to make such an agreement or commitment not to enforce a
+patent against the party.
+
+ If you convey a covered work, knowingly relying on a patent license,
+and the Corresponding Source of the work is not available for anyone
+to copy, free of charge and under the terms of this License, through a
+publicly available network server or other readily accessible means,
+then you must either (1) cause the Corresponding Source to be so
+available, or (2) arrange to deprive yourself of the benefit of the
+patent license for this particular work, or (3) arrange, in a manner
+consistent with the requirements of this License, to extend the patent
+license to downstream recipients. "Knowingly relying" means you have
+actual knowledge that, but for the patent license, your conveying the
+covered work in a country, or your recipient's use of the covered work
+in a country, would infringe one or more identifiable patents in that
+country that you have reason to believe are valid.
+
+ If, pursuant to or in connection with a single transaction or
+arrangement, you convey, or propagate by procuring conveyance of, a
+covered work, and grant a patent license to some of the parties
+receiving the covered work authorizing them to use, propagate, modify
+or convey a specific copy of the covered work, then the patent license
+you grant is automatically extended to all recipients of the covered
+work and works based on it.
+
+ A patent license is "discriminatory" if it does not include within
+the scope of its coverage, prohibits the exercise of, or is
+conditioned on the non-exercise of one or more of the rights that are
+specifically granted under this License. You may not convey a covered
+work if you are a party to an arrangement with a third party that is
+in the business of distributing software, under which you make payment
+to the third party based on the extent of your activity of conveying
+the work, and under which the third party grants, to any of the
+parties who would receive the covered work from you, a discriminatory
+patent license (a) in connection with copies of the covered work
+conveyed by you (or copies made from those copies), or (b) primarily
+for and in connection with specific products or compilations that
+contain the covered work, unless you entered into that arrangement,
+or that patent license was granted, prior to 28 March 2007.
+
+ Nothing in this License shall be construed as excluding or limiting
+any implied license or other defenses to infringement that may
+otherwise be available to you under applicable patent law.
+
+ 12. No Surrender of Others' Freedom.
+
+ If conditions are imposed on you (whether by court order, agreement or
+otherwise) that contradict the conditions of this License, they do not
+excuse you from the conditions of this License. If you cannot convey a
+covered work so as to satisfy simultaneously your obligations under this
+License and any other pertinent obligations, then as a consequence you may
+not convey it at all. For example, if you agree to terms that obligate you
+to collect a royalty for further conveying from those to whom you convey
+the Program, the only way you could satisfy both those terms and this
+License would be to refrain entirely from conveying the Program.
+
+ 13. Use with the GNU Affero General Public License.
+
+ Notwithstanding any other provision of this License, you have
+permission to link or combine any covered work with a work licensed
+under version 3 of the GNU Affero General Public License into a single
+combined work, and to convey the resulting work. The terms of this
+License will continue to apply to the part which is the covered work,
+but the special requirements of the GNU Affero General Public License,
+section 13, concerning interaction through a network will apply to the
+combination as such.
+
+ 14. Revised Versions of this License.
+
+ The Free Software Foundation may publish revised and/or new versions of
+the GNU General Public License from time to time. Such new versions will
+be similar in spirit to the present version, but may differ in detail to
+address new problems or concerns.
+
+ Each version is given a distinguishing version number. If the
+Program specifies that a certain numbered version of the GNU General
+Public License "or any later version" applies to it, you have the
+option of following the terms and conditions either of that numbered
+version or of any later version published by the Free Software
+Foundation. If the Program does not specify a version number of the
+GNU General Public License, you may choose any version ever published
+by the Free Software Foundation.
+
+ If the Program specifies that a proxy can decide which future
+versions of the GNU General Public License can be used, that proxy's
+public statement of acceptance of a version permanently authorizes you
+to choose that version for the Program.
+
+ Later license versions may give you additional or different
+permissions. However, no additional obligations are imposed on any
+author or copyright holder as a result of your choosing to follow a
+later version.
+
+ 15. Disclaimer of Warranty.
+
+ THERE IS NO WARRANTY FOR THE PROGRAM, TO THE EXTENT PERMITTED BY
+APPLICABLE LAW. EXCEPT WHEN OTHERWISE STATED IN WRITING THE COPYRIGHT
+HOLDERS AND/OR OTHER PARTIES PROVIDE THE PROGRAM "AS IS" WITHOUT WARRANTY
+OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING, BUT NOT LIMITED TO,
+THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
+PURPOSE. THE ENTIRE RISK AS TO THE QUALITY AND PERFORMANCE OF THE PROGRAM
+IS WITH YOU. SHOULD THE PROGRAM PROVE DEFECTIVE, YOU ASSUME THE COST OF
+ALL NECESSARY SERVICING, REPAIR OR CORRECTION.
+
+ 16. Limitation of Liability.
+
+ IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW OR AGREED TO IN WRITING
+WILL ANY COPYRIGHT HOLDER, OR ANY OTHER PARTY WHO MODIFIES AND/OR CONVEYS
+THE PROGRAM AS PERMITTED ABOVE, BE LIABLE TO YOU FOR DAMAGES, INCLUDING ANY
+GENERAL, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING OUT OF THE
+USE OR INABILITY TO USE THE PROGRAM (INCLUDING BUT NOT LIMITED TO LOSS OF
+DATA OR DATA BEING RENDERED INACCURATE OR LOSSES SUSTAINED BY YOU OR THIRD
+PARTIES OR A FAILURE OF THE PROGRAM TO OPERATE WITH ANY OTHER PROGRAMS),
+EVEN IF SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE POSSIBILITY OF
+SUCH DAMAGES.
+
+ 17. Interpretation of Sections 15 and 16.
+
+ If the disclaimer of warranty and limitation of liability provided
+above cannot be given local legal effect according to their terms,
+reviewing courts shall apply local law that most closely approximates
+an absolute waiver of all civil liability in connection with the
+Program, unless a warranty or assumption of liability accompanies a
+copy of the Program in return for a fee.
+
+ END OF TERMS AND CONDITIONS
+
+ How to Apply These Terms to Your New Programs
+
+ If you develop a new program, and you want it to be of the greatest
+possible use to the public, the best way to achieve this is to make it
+free software which everyone can redistribute and change under these terms.
+
+ To do so, attach the following notices to the program. It is safest
+to attach them to the start of each source file to most effectively
+state the exclusion of warranty; and each file should have at least
+the "copyright" line and a pointer to where the full notice is found.
+
+
+ Copyright (C)
+
+ This program is free software: you can redistribute it and/or modify
+ it under the terms of the GNU General Public License as published by
+ the Free Software Foundation, either version 3 of the License, or
+ (at your option) any later version.
+
+ This program is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
+ GNU General Public License for more details.
+
+ You should have received a copy of the GNU General Public License
+ along with this program. If not, see .
+
+Also add information on how to contact you by electronic and paper mail.
+
+ If the program does terminal interaction, make it output a short
+notice like this when it starts in an interactive mode:
+
+ Copyright (C)
+ This program comes with ABSOLUTELY NO WARRANTY; for details type `show w'.
+ This is free software, and you are welcome to redistribute it
+ under certain conditions; type `show c' for details.
+
+The hypothetical commands `show w' and `show c' should show the appropriate
+parts of the General Public License. Of course, your program's commands
+might be different; for a GUI interface, you would use an "about box".
+
+ You should also get your employer (if you work as a programmer) or school,
+if any, to sign a "copyright disclaimer" for the program, if necessary.
+For more information on this, and how to apply and follow the GNU GPL, see
+.
+
+ The GNU General Public License does not permit incorporating your program
+into proprietary programs. If your program is a subroutine library, you
+may consider it more useful to permit linking proprietary applications with
+the library. If this is what you want to do, use the GNU Lesser General
+Public License instead of this License. But first, please read
+.
diff --git a/ipex/seg/README.md b/ipex/seg/README.md
new file mode 100644
index 000000000..ed0adda2e
--- /dev/null
+++ b/ipex/seg/README.md
@@ -0,0 +1,153 @@
+# yolov7
+
+Implementation of "YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors"
+
+This implimentation is based on [yolov5](https://github.com/ultralytics/yolov5).
+
+All of installation, data preparation, and usage are as same as yolov5.
+
+## Training
+
+``` shell
+python segment/train.py --data coco.yaml --batch 16 --weights '' --cfg yolov7-seg.yaml --epochs 300 --name yolov7-seg --img 640 --hyp hyp.scratch-high.yaml
+```
+
+## Results
+
+[`yolov7-seg.pt`](https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7-seg.pt)
+
+```
+Object detection:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.49629
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.67746
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.53842
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.32679
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.55475
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.63948
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.37569
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.61747
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.66796
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.49381
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.72859
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.81632
+
+Instance segmentation:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.40531
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.64003
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.42996
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.22329
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.46102
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.56453
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.32220
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.51069
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.54511
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.34929
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.61070
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.72177
+```
+
+[`yolov7x-seg.pt`](https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7x-seg.pt)
+
+```
+Object detection:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.51650
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.69517
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.56113
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.34761
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.57255
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.66059
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.38840
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.63697
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.68754
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.51488
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.74506
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.83554
+
+Instance segmentation:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.41901
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.65833
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.44483
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.23123
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.47414
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.58149
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.33164
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.52327
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.55738
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.35367
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.62091
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.74205
+```
+
+## Examples
+
+
+
+## Developing...
+
+[`yolov7-seg-dev.pt`](https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7-seg-dev.pt)
+
+```
+Object detection:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.51100
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.68832
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.55593
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.34518
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.56570
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.65318
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.38180
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.63630
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.68619
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.52338
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.74392
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.82744
+
+Instance segmentation:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.41422
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.65154
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.44169
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.23393
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.46379
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.57722
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.32766
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.52457
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.55851
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.35866
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.61833
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.74352
+```
+
+update yolor modling
+
+```
+Object detection:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.51384
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.69383
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.55794
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.34061
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.56557
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.66566
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.38459
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.63617
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.68621
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.52662
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.73997
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.83435
+
+Instance segmentation:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.41483
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.65499
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.43665
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.22629
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.46021
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.58898
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.32963
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.52450
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.55855
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.36392
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.61302
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.74983
+```
diff --git a/ipex/seg/classify/predict.py b/ipex/seg/classify/predict.py
new file mode 100644
index 000000000..937704d0f
--- /dev/null
+++ b/ipex/seg/classify/predict.py
@@ -0,0 +1,214 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run YOLOv5 classification inference on images, videos, directories, globs, YouTube, webcam, streams, etc.
+
+Usage - sources:
+ $ python classify/predict.py --weights yolov5s-cls.pt --source 0 # webcam
+ img.jpg # image
+ vid.mp4 # video
+ path/ # directory
+ 'path/*.jpg' # glob
+ 'https://youtu.be/Zgi9g1ksQHc' # YouTube
+ 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
+
+Usage - formats:
+ $ python classify/predict.py --weights yolov5s-cls.pt # PyTorch
+ yolov5s-cls.torchscript # TorchScript
+ yolov5s-cls.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s-cls.xml # OpenVINO
+ yolov5s-cls.engine # TensorRT
+ yolov5s-cls.mlmodel # CoreML (macOS-only)
+ yolov5s-cls_saved_model # TensorFlow SavedModel
+ yolov5s-cls.pb # TensorFlow GraphDef
+ yolov5s-cls.tflite # TensorFlow Lite
+ yolov5s-cls_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import os
+import platform
+import sys
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+import torch.nn.functional as F
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.augmentations import classify_transforms
+from utils.dataloaders import IMG_FORMATS, VID_FORMATS, LoadImages, LoadStreams
+from utils.general import (LOGGER, Profile, check_file, check_img_size, check_imshow, check_requirements, colorstr, cv2,
+ increment_path, print_args, strip_optimizer)
+from utils.plots import Annotator
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+@smart_inference_mode()
+def run(
+ weights=ROOT / 'yolov5s-cls.pt', # model.pt path(s)
+ source=ROOT / 'data/images', # file/dir/URL/glob, 0 for webcam
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ imgsz=(224, 224), # inference size (height, width)
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ view_img=False, # show results
+ save_txt=False, # save results to *.txt
+ nosave=False, # do not save images/videos
+ augment=False, # augmented inference
+ visualize=False, # visualize features
+ update=False, # update all models
+ project=ROOT / 'runs/predict-cls', # save results to project/name
+ name='exp', # save results to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+):
+ source = str(source)
+ save_img = not nosave and not source.endswith('.txt') # save inference images
+ is_file = Path(source).suffix[1:] in (IMG_FORMATS + VID_FORMATS)
+ is_url = source.lower().startswith(('rtsp://', 'rtmp://', 'http://', 'https://'))
+ webcam = source.isnumeric() or source.endswith('.txt') or (is_url and not is_file)
+ if is_url and is_file:
+ source = check_file(source) # download
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ device = select_device(device)
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, names, pt = model.stride, model.names, model.pt
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+
+ # Dataloader
+ if webcam:
+ view_img = check_imshow()
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, transforms=classify_transforms(imgsz[0]))
+ bs = len(dataset) # batch_size
+ else:
+ dataset = LoadImages(source, img_size=imgsz, transforms=classify_transforms(imgsz[0]))
+ bs = 1 # batch_size
+ vid_path, vid_writer = [None] * bs, [None] * bs
+
+ # Run inference
+ model.warmup(imgsz=(1 if pt else bs, 3, *imgsz)) # warmup
+ seen, windows, dt = 0, [], (Profile(), Profile(), Profile())
+ for path, im, im0s, vid_cap, s in dataset:
+ with dt[0]:
+ im = torch.Tensor(im).to(device)
+ im = im.half() if model.fp16 else im.float() # uint8 to fp16/32
+ if len(im.shape) == 3:
+ im = im[None] # expand for batch dim
+
+ # Inference
+ with dt[1]:
+ results = model(im)
+
+ # Post-process
+ with dt[2]:
+ pred = F.softmax(results, dim=1) # probabilities
+
+ # Process predictions
+ for i, prob in enumerate(pred): # per image
+ seen += 1
+ if webcam: # batch_size >= 1
+ p, im0 = path[i], im0s[i].copy()
+ s += f'{i}: '
+ else:
+ p, im0 = path, im0s.copy()
+
+ p = Path(p) # to Path
+ save_path = str(save_dir / p.name) # im.jpg
+ s += '%gx%g ' % im.shape[2:] # print string
+ annotator = Annotator(im0, example=str(names), pil=True)
+
+ # Print results
+ top5i = prob.argsort(0, descending=True)[:5].tolist() # top 5 indices
+ s += f"{', '.join(f'{names[j]} {prob[j]:.2f}' for j in top5i)}, "
+
+ # Write results
+ if save_img or view_img: # Add bbox to image
+ text = '\n'.join(f'{prob[j]:.2f} {names[j]}' for j in top5i)
+ annotator.text((32, 32), text, txt_color=(255, 255, 255))
+
+ # Stream results
+ im0 = annotator.result()
+ if view_img:
+ if platform.system() == 'Linux' and p not in windows:
+ windows.append(p)
+ cv2.namedWindow(str(p), cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO) # allow window resize (Linux)
+ cv2.resizeWindow(str(p), im0.shape[1], im0.shape[0])
+ cv2.imshow(str(p), im0)
+ cv2.waitKey(1) # 1 millisecond
+
+ # Save results (image with detections)
+ if save_img:
+ if dataset.mode == 'image':
+ cv2.imwrite(save_path, im0)
+ else: # 'video' or 'stream'
+ if vid_path[i] != save_path: # new video
+ vid_path[i] = save_path
+ if isinstance(vid_writer[i], cv2.VideoWriter):
+ vid_writer[i].release() # release previous video writer
+ if vid_cap: # video
+ fps = vid_cap.get(cv2.CAP_PROP_FPS)
+ w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ else: # stream
+ fps, w, h = 30, im0.shape[1], im0.shape[0]
+ save_path = str(Path(save_path).with_suffix('.mp4')) # force *.mp4 suffix on results videos
+ vid_writer[i] = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
+ vid_writer[i].write(im0)
+
+ # Print time (inference-only)
+ LOGGER.info(f"{s}{dt[1].dt * 1E3:.1f}ms")
+
+ # Print results
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {(1, 3, *imgsz)}' % t)
+ if save_txt or save_img:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ if update:
+ strip_optimizer(weights[0]) # update model (to fix SourceChangeWarning)
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s-cls.pt', help='model path(s)')
+ parser.add_argument('--source', type=str, default=ROOT / 'data/images', help='file/dir/URL/glob, 0 for webcam')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='(optional) dataset.yaml path')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[224], help='inference size h,w')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--view-img', action='store_true', help='show results')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--visualize', action='store_true', help='visualize features')
+ parser.add_argument('--update', action='store_true', help='update all models')
+ parser.add_argument('--project', default=ROOT / 'runs/predict-cls', help='save results to project/name')
+ parser.add_argument('--name', default='exp', help='save results to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/ipex/seg/classify/train.py b/ipex/seg/classify/train.py
new file mode 100644
index 000000000..223367260
--- /dev/null
+++ b/ipex/seg/classify/train.py
@@ -0,0 +1,331 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Train a YOLOv5 classifier model on a classification dataset
+
+Usage - Single-GPU training:
+ $ python classify/train.py --model yolov5s-cls.pt --data imagenette160 --epochs 5 --img 128
+
+Usage - Multi-GPU DDP training:
+ $ python -m torch.distributed.run --nproc_per_node 4 --master_port 1 classify/train.py --model yolov5s-cls.pt --data imagenet --epochs 5 --img 224 --device 0,1,2,3
+
+Datasets: --data mnist, fashion-mnist, cifar10, cifar100, imagenette, imagewoof, imagenet, or 'path/to/data'
+YOLOv5-cls models: --model yolov5n-cls.pt, yolov5s-cls.pt, yolov5m-cls.pt, yolov5l-cls.pt, yolov5x-cls.pt
+Torchvision models: --model resnet50, efficientnet_b0, etc. See https://pytorch.org/vision/stable/models.html
+"""
+
+import argparse
+import os
+import subprocess
+import sys
+import time
+from copy import deepcopy
+from datetime import datetime
+from pathlib import Path
+
+import torch
+import torch.distributed as dist
+import torch.hub as hub
+import torch.optim.lr_scheduler as lr_scheduler
+import torchvision
+from torch.cuda import amp
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from classify import val as validate
+from models.experimental import attempt_load
+from models.yolo import ClassificationModel, DetectionModel
+from utils.dataloaders import create_classification_dataloader
+from utils.general import (DATASETS_DIR, LOGGER, WorkingDirectory, check_git_status, check_requirements, colorstr,
+ download, increment_path, init_seeds, print_args, yaml_save)
+from utils.loggers import GenericLogger
+from utils.plots import imshow_cls
+from utils.torch_utils import (ModelEMA, model_info, reshape_classifier_output, select_device, smart_DDP,
+ smart_optimizer, smartCrossEntropyLoss, torch_distributed_zero_first)
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+
+def train(opt, device):
+ init_seeds(opt.seed + 1 + RANK, deterministic=True)
+ save_dir, data, bs, epochs, nw, imgsz, pretrained = \
+ opt.save_dir, Path(opt.data), opt.batch_size, opt.epochs, min(os.cpu_count() - 1, opt.workers), \
+ opt.imgsz, str(opt.pretrained).lower() == 'true'
+ cuda = device.type != 'cpu'
+
+ # Directories
+ wdir = save_dir / 'weights'
+ wdir.mkdir(parents=True, exist_ok=True) # make dir
+ last, best = wdir / 'last.pt', wdir / 'best.pt'
+
+ # Save run settings
+ yaml_save(save_dir / 'opt.yaml', vars(opt))
+
+ # Logger
+ logger = GenericLogger(opt=opt, console_logger=LOGGER) if RANK in {-1, 0} else None
+
+ # Download Dataset
+ with torch_distributed_zero_first(LOCAL_RANK), WorkingDirectory(ROOT):
+ data_dir = data if data.is_dir() else (DATASETS_DIR / data)
+ if not data_dir.is_dir():
+ LOGGER.info(f'\nDataset not found ⚠️, missing path {data_dir}, attempting download...')
+ t = time.time()
+ if str(data) == 'imagenet':
+ subprocess.run(f"bash {ROOT / 'data/scripts/get_imagenet.sh'}", shell=True, check=True)
+ else:
+ url = f'https://github.com/ultralytics/yolov5/releases/download/v1.0/{data}.zip'
+ download(url, dir=data_dir.parent)
+ s = f"Dataset download success ✅ ({time.time() - t:.1f}s), saved to {colorstr('bold', data_dir)}\n"
+ LOGGER.info(s)
+
+ # Dataloaders
+ nc = len([x for x in (data_dir / 'train').glob('*') if x.is_dir()]) # number of classes
+ trainloader = create_classification_dataloader(path=data_dir / 'train',
+ imgsz=imgsz,
+ batch_size=bs // WORLD_SIZE,
+ augment=True,
+ cache=opt.cache,
+ rank=LOCAL_RANK,
+ workers=nw)
+
+ test_dir = data_dir / 'test' if (data_dir / 'test').exists() else data_dir / 'val' # data/test or data/val
+ if RANK in {-1, 0}:
+ testloader = create_classification_dataloader(path=test_dir,
+ imgsz=imgsz,
+ batch_size=bs // WORLD_SIZE * 2,
+ augment=False,
+ cache=opt.cache,
+ rank=-1,
+ workers=nw)
+
+ # Model
+ with torch_distributed_zero_first(LOCAL_RANK), WorkingDirectory(ROOT):
+ if Path(opt.model).is_file() or opt.model.endswith('.pt'):
+ model = attempt_load(opt.model, device='cpu', fuse=False)
+ elif opt.model in torchvision.models.__dict__: # TorchVision models i.e. resnet50, efficientnet_b0
+ model = torchvision.models.__dict__[opt.model](weights='IMAGENET1K_V1' if pretrained else None)
+ else:
+ m = hub.list('ultralytics/yolov5') # + hub.list('pytorch/vision') # models
+ raise ModuleNotFoundError(f'--model {opt.model} not found. Available models are: \n' + '\n'.join(m))
+ if isinstance(model, DetectionModel):
+ LOGGER.warning("WARNING: pass YOLOv5 classifier model with '-cls' suffix, i.e. '--model yolov5s-cls.pt'")
+ model = ClassificationModel(model=model, nc=nc, cutoff=opt.cutoff or 10) # convert to classification model
+ reshape_classifier_output(model, nc) # update class count
+ for m in model.modules():
+ if not pretrained and hasattr(m, 'reset_parameters'):
+ m.reset_parameters()
+ if isinstance(m, torch.nn.Dropout) and opt.dropout is not None:
+ m.p = opt.dropout # set dropout
+ for p in model.parameters():
+ p.requires_grad = True # for training
+ model = model.to(device)
+
+ # Info
+ if RANK in {-1, 0}:
+ model.names = trainloader.dataset.classes # attach class names
+ model.transforms = testloader.dataset.torch_transforms # attach inference transforms
+ model_info(model)
+ if opt.verbose:
+ LOGGER.info(model)
+ images, labels = next(iter(trainloader))
+ file = imshow_cls(images[:25], labels[:25], names=model.names, f=save_dir / 'train_images.jpg')
+ logger.log_images(file, name='Train Examples')
+ logger.log_graph(model, imgsz) # log model
+
+ # Optimizer
+ optimizer = smart_optimizer(model, opt.optimizer, opt.lr0, momentum=0.9, decay=opt.decay)
+
+ # Scheduler
+ lrf = 0.01 # final lr (fraction of lr0)
+ # lf = lambda x: ((1 + math.cos(x * math.pi / epochs)) / 2) * (1 - lrf) + lrf # cosine
+ lf = lambda x: (1 - x / epochs) * (1 - lrf) + lrf # linear
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
+ # scheduler = lr_scheduler.OneCycleLR(optimizer, max_lr=lr0, total_steps=epochs, pct_start=0.1,
+ # final_div_factor=1 / 25 / lrf)
+
+ # EMA
+ ema = ModelEMA(model) if RANK in {-1, 0} else None
+
+ # DDP mode
+ if cuda and RANK != -1:
+ model = smart_DDP(model)
+
+ # Train
+ t0 = time.time()
+ criterion = smartCrossEntropyLoss(label_smoothing=opt.label_smoothing) # loss function
+ best_fitness = 0.0
+ scaler = amp.GradScaler(enabled=cuda)
+ val = test_dir.stem # 'val' or 'test'
+ LOGGER.info(f'Image sizes {imgsz} train, {imgsz} test\n'
+ f'Using {nw * WORLD_SIZE} dataloader workers\n'
+ f"Logging results to {colorstr('bold', save_dir)}\n"
+ f'Starting {opt.model} training on {data} dataset with {nc} classes for {epochs} epochs...\n\n'
+ f"{'Epoch':>10}{'GPU_mem':>10}{'train_loss':>12}{f'{val}_loss':>12}{'top1_acc':>12}{'top5_acc':>12}")
+ for epoch in range(epochs): # loop over the dataset multiple times
+ tloss, vloss, fitness = 0.0, 0.0, 0.0 # train loss, val loss, fitness
+ model.train()
+ if RANK != -1:
+ trainloader.sampler.set_epoch(epoch)
+ pbar = enumerate(trainloader)
+ if RANK in {-1, 0}:
+ pbar = tqdm(enumerate(trainloader), total=len(trainloader), bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}')
+ for i, (images, labels) in pbar: # progress bar
+ images, labels = images.to(device, non_blocking=True), labels.to(device)
+
+ # Forward
+ with amp.autocast(enabled=cuda): # stability issues when enabled
+ loss = criterion(model(images), labels)
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize
+ scaler.unscale_(optimizer) # unscale gradients
+ torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=10.0) # clip gradients
+ scaler.step(optimizer)
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+
+ if RANK in {-1, 0}:
+ # Print
+ tloss = (tloss * i + loss.item()) / (i + 1) # update mean losses
+ mem = '%.3gG' % (torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0) # (GB)
+ pbar.desc = f"{f'{epoch + 1}/{epochs}':>10}{mem:>10}{tloss:>12.3g}" + ' ' * 36
+
+ # Test
+ if i == len(pbar) - 1: # last batch
+ top1, top5, vloss = validate.run(model=ema.ema,
+ dataloader=testloader,
+ criterion=criterion,
+ pbar=pbar) # test accuracy, loss
+ fitness = top1 # define fitness as top1 accuracy
+
+ # Scheduler
+ scheduler.step()
+
+ # Log metrics
+ if RANK in {-1, 0}:
+ # Best fitness
+ if fitness > best_fitness:
+ best_fitness = fitness
+
+ # Log
+ metrics = {
+ "train/loss": tloss,
+ f"{val}/loss": vloss,
+ "metrics/accuracy_top1": top1,
+ "metrics/accuracy_top5": top5,
+ "lr/0": optimizer.param_groups[0]['lr']} # learning rate
+ logger.log_metrics(metrics, epoch)
+
+ # Save model
+ final_epoch = epoch + 1 == epochs
+ if (not opt.nosave) or final_epoch:
+ ckpt = {
+ 'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'model': deepcopy(ema.ema).half(), # deepcopy(de_parallel(model)).half(),
+ 'ema': None, # deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': None, # optimizer.state_dict(),
+ 'opt': vars(opt),
+ 'date': datetime.now().isoformat()}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fitness:
+ torch.save(ckpt, best)
+ del ckpt
+
+ # Train complete
+ if RANK in {-1, 0} and final_epoch:
+ LOGGER.info(f'\nTraining complete ({(time.time() - t0) / 3600:.3f} hours)'
+ f"\nResults saved to {colorstr('bold', save_dir)}"
+ f"\nPredict: python classify/predict.py --weights {best} --source im.jpg"
+ f"\nValidate: python classify/val.py --weights {best} --data {data_dir}"
+ f"\nExport: python export.py --weights {best} --include onnx"
+ f"\nPyTorch Hub: model = torch.hub.load('ultralytics/yolov5', 'custom', '{best}')"
+ f"\nVisualize: https://netron.app\n")
+
+ # Plot examples
+ images, labels = (x[:25] for x in next(iter(testloader))) # first 25 images and labels
+ pred = torch.max(ema.ema(images.to(device)), 1)[1]
+ file = imshow_cls(images, labels, pred, model.names, verbose=False, f=save_dir / 'test_images.jpg')
+
+ # Log results
+ meta = {"epochs": epochs, "top1_acc": best_fitness, "date": datetime.now().isoformat()}
+ logger.log_images(file, name='Test Examples (true-predicted)', epoch=epoch)
+ logger.log_model(best, epochs, metadata=meta)
+
+
+def parse_opt(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--model', type=str, default='yolov5s-cls.pt', help='initial weights path')
+ parser.add_argument('--data', type=str, default='imagenette160', help='cifar10, cifar100, mnist, imagenet, ...')
+ parser.add_argument('--epochs', type=int, default=10, help='total training epochs')
+ parser.add_argument('--batch-size', type=int, default=64, help='total batch size for all GPUs')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=128, help='train, val image size (pixels)')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default=ROOT / 'runs/train-cls', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--pretrained', nargs='?', const=True, default=True, help='start from i.e. --pretrained False')
+ parser.add_argument('--optimizer', choices=['SGD', 'Adam', 'AdamW', 'RMSProp'], default='Adam', help='optimizer')
+ parser.add_argument('--lr0', type=float, default=0.001, help='initial learning rate')
+ parser.add_argument('--decay', type=float, default=5e-5, help='weight decay')
+ parser.add_argument('--label-smoothing', type=float, default=0.1, help='Label smoothing epsilon')
+ parser.add_argument('--cutoff', type=int, default=None, help='Model layer cutoff index for Classify() head')
+ parser.add_argument('--dropout', type=float, default=None, help='Dropout (fraction)')
+ parser.add_argument('--verbose', action='store_true', help='Verbose mode')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def main(opt):
+ # Checks
+ if RANK in {-1, 0}:
+ print_args(vars(opt))
+ check_git_status()
+ check_requirements()
+
+ # DDP mode
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if LOCAL_RANK != -1:
+ assert opt.batch_size != -1, 'AutoBatch is coming soon for classification, please pass a valid --batch-size'
+ assert opt.batch_size % WORLD_SIZE == 0, f'--batch-size {opt.batch_size} must be multiple of WORLD_SIZE'
+ assert torch.cuda.device_count() > LOCAL_RANK, 'insufficient CUDA devices for DDP command'
+ torch.cuda.set_device(LOCAL_RANK)
+ device = torch.device('cuda', LOCAL_RANK)
+ dist.init_process_group(backend="nccl" if dist.is_nccl_available() else "gloo")
+
+ # Parameters
+ opt.save_dir = increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok) # increment run
+
+ # Train
+ train(opt, device)
+
+
+def run(**kwargs):
+ # Usage: from yolov5 import classify; classify.train.run(data=mnist, imgsz=320, model='yolov5m')
+ opt = parse_opt(True)
+ for k, v in kwargs.items():
+ setattr(opt, k, v)
+ main(opt)
+ return opt
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/ipex/seg/classify/val.py b/ipex/seg/classify/val.py
new file mode 100644
index 000000000..bf808bc21
--- /dev/null
+++ b/ipex/seg/classify/val.py
@@ -0,0 +1,168 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a trained YOLOv5 classification model on a classification dataset
+
+Usage:
+ $ bash data/scripts/get_imagenet.sh --val # download ImageNet val split (6.3G, 50000 images)
+ $ python classify/val.py --weights yolov5m-cls.pt --data ../datasets/imagenet --img 224 # validate ImageNet
+
+Usage - formats:
+ $ python classify/val.py --weights yolov5s-cls.pt # PyTorch
+ yolov5s-cls.torchscript # TorchScript
+ yolov5s-cls.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s-cls.xml # OpenVINO
+ yolov5s-cls.engine # TensorRT
+ yolov5s-cls.mlmodel # CoreML (macOS-only)
+ yolov5s-cls_saved_model # TensorFlow SavedModel
+ yolov5s-cls.pb # TensorFlow GraphDef
+ yolov5s-cls.tflite # TensorFlow Lite
+ yolov5s-cls_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import os
+import sys
+from pathlib import Path
+
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.dataloaders import create_classification_dataloader
+from utils.general import LOGGER, Profile, check_img_size, check_requirements, colorstr, increment_path, print_args
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+@smart_inference_mode()
+def run(
+ data=ROOT / '../datasets/mnist', # dataset dir
+ weights=ROOT / 'yolov5s-cls.pt', # model.pt path(s)
+ batch_size=128, # batch size
+ imgsz=224, # inference size (pixels)
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ workers=8, # max dataloader workers (per RANK in DDP mode)
+ verbose=False, # verbose output
+ project=ROOT / 'runs/val-cls', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ model=None,
+ dataloader=None,
+ criterion=None,
+ pbar=None,
+):
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ model.half() if half else model.float()
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ save_dir.mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ if engine:
+ batch_size = model.batch_size
+ else:
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
+
+ # Dataloader
+ data = Path(data)
+ test_dir = data / 'test' if (data / 'test').exists() else data / 'val' # data/test or data/val
+ dataloader = create_classification_dataloader(path=test_dir,
+ imgsz=imgsz,
+ batch_size=batch_size,
+ augment=False,
+ rank=-1,
+ workers=workers)
+
+ model.eval()
+ pred, targets, loss, dt = [], [], 0, (Profile(), Profile(), Profile())
+ n = len(dataloader) # number of batches
+ action = 'validating' if dataloader.dataset.root.stem == 'val' else 'testing'
+ desc = f"{pbar.desc[:-36]}{action:>36}" if pbar else f"{action}"
+ bar = tqdm(dataloader, desc, n, not training, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}', position=0)
+ with torch.cuda.amp.autocast(enabled=device.type != 'cpu'):
+ for images, labels in bar:
+ with dt[0]:
+ images, labels = images.to(device, non_blocking=True), labels.to(device)
+
+ with dt[1]:
+ y = model(images)
+
+ with dt[2]:
+ pred.append(y.argsort(1, descending=True)[:, :5])
+ targets.append(labels)
+ if criterion:
+ loss += criterion(y, labels)
+
+ loss /= n
+ pred, targets = torch.cat(pred), torch.cat(targets)
+ correct = (targets[:, None] == pred).float()
+ acc = torch.stack((correct[:, 0], correct.max(1).values), dim=1) # (top1, top5) accuracy
+ top1, top5 = acc.mean(0).tolist()
+
+ if pbar:
+ pbar.desc = f"{pbar.desc[:-36]}{loss:>12.3g}{top1:>12.3g}{top5:>12.3g}"
+ if verbose: # all classes
+ LOGGER.info(f"{'Class':>24}{'Images':>12}{'top1_acc':>12}{'top5_acc':>12}")
+ LOGGER.info(f"{'all':>24}{targets.shape[0]:>12}{top1:>12.3g}{top5:>12.3g}")
+ for i, c in model.names.items():
+ aci = acc[targets == i]
+ top1i, top5i = aci.mean(0).tolist()
+ LOGGER.info(f"{c:>24}{aci.shape[0]:>12}{top1i:>12.3g}{top5i:>12.3g}")
+
+ # Print results
+ t = tuple(x.t / len(dataloader.dataset.samples) * 1E3 for x in dt) # speeds per image
+ shape = (1, 3, imgsz, imgsz)
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms post-process per image at shape {shape}' % t)
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}")
+
+ return top1, top5, loss
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / '../datasets/mnist', help='dataset path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s-cls.pt', help='model.pt path(s)')
+ parser.add_argument('--batch-size', type=int, default=128, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=224, help='inference size (pixels)')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--verbose', nargs='?', const=True, default=True, help='verbose output')
+ parser.add_argument('--project', default=ROOT / 'runs/val-cls', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/ipex/seg/data/coco.yaml b/ipex/seg/data/coco.yaml
new file mode 100644
index 000000000..d64dfc7fe
--- /dev/null
+++ b/ipex/seg/data/coco.yaml
@@ -0,0 +1,116 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# COCO 2017 dataset http://cocodataset.org by Microsoft
+# Example usage: python train.py --data coco.yaml
+# parent
+# ├── yolov5
+# └── datasets
+# └── coco ← downloads here (20.1 GB)
+
+
+# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
+path: ../datasets/coco # dataset root dir
+train: train2017.txt # train images (relative to 'path') 118287 images
+val: val2017.txt # val images (relative to 'path') 5000 images
+test: test-dev2017.txt # 20288 of 40670 images, submit to https://competitions.codalab.org/competitions/20794
+
+# Classes
+names:
+ 0: person
+ 1: bicycle
+ 2: car
+ 3: motorcycle
+ 4: airplane
+ 5: bus
+ 6: train
+ 7: truck
+ 8: boat
+ 9: traffic light
+ 10: fire hydrant
+ 11: stop sign
+ 12: parking meter
+ 13: bench
+ 14: bird
+ 15: cat
+ 16: dog
+ 17: horse
+ 18: sheep
+ 19: cow
+ 20: elephant
+ 21: bear
+ 22: zebra
+ 23: giraffe
+ 24: backpack
+ 25: umbrella
+ 26: handbag
+ 27: tie
+ 28: suitcase
+ 29: frisbee
+ 30: skis
+ 31: snowboard
+ 32: sports ball
+ 33: kite
+ 34: baseball bat
+ 35: baseball glove
+ 36: skateboard
+ 37: surfboard
+ 38: tennis racket
+ 39: bottle
+ 40: wine glass
+ 41: cup
+ 42: fork
+ 43: knife
+ 44: spoon
+ 45: bowl
+ 46: banana
+ 47: apple
+ 48: sandwich
+ 49: orange
+ 50: broccoli
+ 51: carrot
+ 52: hot dog
+ 53: pizza
+ 54: donut
+ 55: cake
+ 56: chair
+ 57: couch
+ 58: potted plant
+ 59: bed
+ 60: dining table
+ 61: toilet
+ 62: tv
+ 63: laptop
+ 64: mouse
+ 65: remote
+ 66: keyboard
+ 67: cell phone
+ 68: microwave
+ 69: oven
+ 70: toaster
+ 71: sink
+ 72: refrigerator
+ 73: book
+ 74: clock
+ 75: vase
+ 76: scissors
+ 77: teddy bear
+ 78: hair drier
+ 79: toothbrush
+
+
+# Download script/URL (optional)
+download: |
+ from utils.general import download, Path
+
+
+ # Download labels
+ segments = False # segment or box labels
+ dir = Path(yaml['path']) # dataset root dir
+ url = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/'
+ urls = [url + ('coco2017labels-segments.zip' if segments else 'coco2017labels.zip')] # labels
+ download(urls, dir=dir.parent)
+
+ # Download data
+ urls = ['http://images.cocodataset.org/zips/train2017.zip', # 19G, 118k images
+ 'http://images.cocodataset.org/zips/val2017.zip', # 1G, 5k images
+ 'http://images.cocodataset.org/zips/test2017.zip'] # 7G, 41k images (optional)
+ download(urls, dir=dir / 'images', threads=3)
diff --git a/ipex/seg/data/hyps/hyp.scratch-high.yaml b/ipex/seg/data/hyps/hyp.scratch-high.yaml
new file mode 100644
index 000000000..123cc8407
--- /dev/null
+++ b/ipex/seg/data/hyps/hyp.scratch-high.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for high-augmentation COCO training from scratch
+# python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.3 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 0.7 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.9 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.1 # image mixup (probability)
+copy_paste: 0.1 # segment copy-paste (probability)
diff --git a/ipex/seg/data/hyps/hyp.scratch-low.yaml b/ipex/seg/data/hyps/hyp.scratch-low.yaml
new file mode 100644
index 000000000..b9ef1d55a
--- /dev/null
+++ b/ipex/seg/data/hyps/hyp.scratch-low.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for low-augmentation COCO training from scratch
+# python train.py --batch 64 --cfg yolov5n6.yaml --weights '' --data coco.yaml --img 640 --epochs 300 --linear
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.01 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.5 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 1.0 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.5 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.0 # image mixup (probability)
+copy_paste: 0.0 # segment copy-paste (probability)
diff --git a/ipex/seg/data/hyps/hyp.scratch-med.yaml b/ipex/seg/data/hyps/hyp.scratch-med.yaml
new file mode 100644
index 000000000..d6867d755
--- /dev/null
+++ b/ipex/seg/data/hyps/hyp.scratch-med.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for medium-augmentation COCO training from scratch
+# python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.3 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 0.7 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.9 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.1 # image mixup (probability)
+copy_paste: 0.0 # segment copy-paste (probability)
diff --git a/ipex/seg/data/scripts/get_coco.sh b/ipex/seg/data/scripts/get_coco.sh
new file mode 100644
index 000000000..506d46df9
--- /dev/null
+++ b/ipex/seg/data/scripts/get_coco.sh
@@ -0,0 +1,56 @@
+#!/bin/bash
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Download COCO 2017 dataset http://cocodataset.org
+# Example usage: bash data/scripts/get_coco.sh
+# parent
+# ├── yolov5
+# └── datasets
+# └── coco ← downloads here
+
+# Arguments (optional) Usage: bash data/scripts/get_coco.sh --train --val --test --segments
+if [ "$#" -gt 0 ]; then
+ for opt in "$@"; do
+ case "${opt}" in
+ --train) train=true ;;
+ --val) val=true ;;
+ --test) test=true ;;
+ --segments) segments=true ;;
+ esac
+ done
+else
+ train=true
+ val=true
+ test=false
+ segments=false
+fi
+
+# Download/unzip labels
+d='../datasets' # unzip directory
+url=https://github.com/ultralytics/yolov5/releases/download/v1.0/
+if [ "$segments" == "true" ]; then
+ f='coco2017labels-segments.zip' # 168 MB
+else
+ f='coco2017labels.zip' # 168 MB
+fi
+echo 'Downloading' $url$f ' ...'
+curl -L $url$f -o $f -# && unzip -q $f -d $d && rm $f &
+
+# Download/unzip images
+d='../datasets/coco/images' # unzip directory
+url=http://images.cocodataset.org/zips/
+if [ "$train" == "true" ]; then
+ f='train2017.zip' # 19G, 118k images
+ echo 'Downloading' $url$f '...'
+ curl -L $url$f -o $f -# && unzip -q $f -d $d && rm $f &
+fi
+if [ "$val" == "true" ]; then
+ f='val2017.zip' # 1G, 5k images
+ echo 'Downloading' $url$f '...'
+ curl -L $url$f -o $f -# && unzip -q $f -d $d && rm $f &
+fi
+if [ "$test" == "true" ]; then
+ f='test2017.zip' # 7G, 41k images (optional)
+ echo 'Downloading' $url$f '...'
+ curl -L $url$f -o $f -# && unzip -q $f -d $d && rm $f &
+fi
+wait # finish background tasks
diff --git a/ipex/seg/data/scripts/get_imagenet.sh b/ipex/seg/data/scripts/get_imagenet.sh
new file mode 100644
index 000000000..6026d502e
--- /dev/null
+++ b/ipex/seg/data/scripts/get_imagenet.sh
@@ -0,0 +1,51 @@
+#!/bin/bash
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Download ILSVRC2012 ImageNet dataset https://image-net.org
+# Example usage: bash data/scripts/get_imagenet.sh
+# parent
+# ├── yolov5
+# └── datasets
+# └── imagenet ← downloads here
+
+# Arguments (optional) Usage: bash data/scripts/get_imagenet.sh --train --val
+if [ "$#" -gt 0 ]; then
+ for opt in "$@"; do
+ case "${opt}" in
+ --train) train=true ;;
+ --val) val=true ;;
+ esac
+ done
+else
+ train=true
+ val=true
+fi
+
+# Make dir
+d='../datasets/imagenet' # unzip directory
+mkdir -p $d && cd $d
+
+# Download/unzip train
+if [ "$train" == "true" ]; then
+ wget https://image-net.org/data/ILSVRC/2012/ILSVRC2012_img_train.tar # download 138G, 1281167 images
+ mkdir train && mv ILSVRC2012_img_train.tar train/ && cd train
+ tar -xf ILSVRC2012_img_train.tar && rm -f ILSVRC2012_img_train.tar
+ find . -name "*.tar" | while read NAME; do
+ mkdir -p "${NAME%.tar}"
+ tar -xf "${NAME}" -C "${NAME%.tar}"
+ rm -f "${NAME}"
+ done
+ cd ..
+fi
+
+# Download/unzip val
+if [ "$val" == "true" ]; then
+ wget https://image-net.org/data/ILSVRC/2012/ILSVRC2012_img_val.tar # download 6.3G, 50000 images
+ mkdir val && mv ILSVRC2012_img_val.tar val/ && cd val && tar -xf ILSVRC2012_img_val.tar
+ wget -qO- https://raw.githubusercontent.com/soumith/imagenetloader.torch/master/valprep.sh | bash # move into subdirs
+fi
+
+# Delete corrupted image (optional: PNG under JPEG name that may cause dataloaders to fail)
+# rm train/n04266014/n04266014_10835.JPEG
+
+# TFRecords (optional)
+# wget https://raw.githubusercontent.com/tensorflow/models/master/research/slim/datasets/imagenet_lsvrc_2015_synsets.txt
diff --git a/ipex/seg/detect.py b/ipex/seg/detect.py
new file mode 100644
index 000000000..3af6baa0e
--- /dev/null
+++ b/ipex/seg/detect.py
@@ -0,0 +1,254 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run YOLOv5 detection inference on images, videos, directories, globs, YouTube, webcam, streams, etc.
+
+Usage - sources:
+ $ python detect.py --weights yolov5s.pt --source 0 # webcam
+ img.jpg # image
+ vid.mp4 # video
+ path/ # directory
+ 'path/*.jpg' # glob
+ 'https://youtu.be/Zgi9g1ksQHc' # YouTube
+ 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
+
+Usage - formats:
+ $ python detect.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import os
+import platform
+import sys
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.dataloaders import IMG_FORMATS, VID_FORMATS, LoadImages, LoadStreams
+from utils.general import (LOGGER, Profile, check_file, check_img_size, check_imshow, check_requirements, colorstr, cv2,
+ increment_path, non_max_suppression, print_args, scale_coords, strip_optimizer, xyxy2xywh)
+from utils.plots import Annotator, colors, save_one_box
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+@smart_inference_mode()
+def run(
+ weights=ROOT / 'yolov5s.pt', # model.pt path(s)
+ source=ROOT / 'data/images', # file/dir/URL/glob, 0 for webcam
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ imgsz=(640, 640), # inference size (height, width)
+ conf_thres=0.25, # confidence threshold
+ iou_thres=0.45, # NMS IOU threshold
+ max_det=1000, # maximum detections per image
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ view_img=False, # show results
+ save_txt=False, # save results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_crop=False, # save cropped prediction boxes
+ nosave=False, # do not save images/videos
+ classes=None, # filter by class: --class 0, or --class 0 2 3
+ agnostic_nms=False, # class-agnostic NMS
+ augment=False, # augmented inference
+ visualize=False, # visualize features
+ update=False, # update all models
+ project=ROOT / 'runs/detect', # save results to project/name
+ name='exp', # save results to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ line_thickness=3, # bounding box thickness (pixels)
+ hide_labels=False, # hide labels
+ hide_conf=False, # hide confidences
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+):
+ source = str(source)
+ save_img = not nosave and not source.endswith('.txt') # save inference images
+ is_file = Path(source).suffix[1:] in (IMG_FORMATS + VID_FORMATS)
+ is_url = source.lower().startswith(('rtsp://', 'rtmp://', 'http://', 'https://'))
+ webcam = source.isnumeric() or source.endswith('.txt') or (is_url and not is_file)
+ if is_url and is_file:
+ source = check_file(source) # download
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ device = select_device(device)
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, names, pt = model.stride, model.names, model.pt
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+
+ # Dataloader
+ if webcam:
+ view_img = check_imshow()
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride, auto=pt)
+ bs = len(dataset) # batch_size
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt)
+ bs = 1 # batch_size
+ vid_path, vid_writer = [None] * bs, [None] * bs
+
+ # Run inference
+ model.warmup(imgsz=(1 if pt else bs, 3, *imgsz)) # warmup
+ seen, windows, dt = 0, [], (Profile(), Profile(), Profile())
+ for path, im, im0s, vid_cap, s in dataset:
+ with dt[0]:
+ im = torch.from_numpy(im).to(device)
+ im = im.half() if model.fp16 else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ if len(im.shape) == 3:
+ im = im[None] # expand for batch dim
+
+ # Inference
+ with dt[1]:
+ visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False
+ pred = model(im, augment=augment, visualize=visualize)
+
+ # NMS
+ with dt[2]:
+ pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det)
+
+ # Second-stage classifier (optional)
+ # pred = utils.general.apply_classifier(pred, classifier_model, im, im0s)
+
+ # Process predictions
+ for i, det in enumerate(pred): # per image
+ seen += 1
+ if webcam: # batch_size >= 1
+ p, im0, frame = path[i], im0s[i].copy(), dataset.count
+ s += f'{i}: '
+ else:
+ p, im0, frame = path, im0s.copy(), getattr(dataset, 'frame', 0)
+
+ p = Path(p) # to Path
+ save_path = str(save_dir / p.name) # im.jpg
+ txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # im.txt
+ s += '%gx%g ' % im.shape[2:] # print string
+ gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
+ imc = im0.copy() if save_crop else im0 # for save_crop
+ annotator = Annotator(im0, line_width=line_thickness, example=str(names))
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(im.shape[2:], det[:, :4], im0.shape).round()
+
+ # Print results
+ for c in det[:, 5].unique():
+ n = (det[:, 5] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ if save_txt: # Write to file
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(f'{txt_path}.txt', 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+ if save_img or save_crop or view_img: # Add bbox to image
+ c = int(cls) # integer class
+ label = None if hide_labels else (names[c] if hide_conf else f'{names[c]} {conf:.2f}')
+ annotator.box_label(xyxy, label, color=colors(c, True))
+ if save_crop:
+ save_one_box(xyxy, imc, file=save_dir / 'crops' / names[c] / f'{p.stem}.jpg', BGR=True)
+
+ # Stream results
+ im0 = annotator.result()
+ if view_img:
+ if platform.system() == 'Linux' and p not in windows:
+ windows.append(p)
+ cv2.namedWindow(str(p), cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO) # allow window resize (Linux)
+ cv2.resizeWindow(str(p), im0.shape[1], im0.shape[0])
+ cv2.imshow(str(p), im0)
+ cv2.waitKey(1) # 1 millisecond
+
+ # Save results (image with detections)
+ if save_img:
+ if dataset.mode == 'image':
+ cv2.imwrite(save_path, im0)
+ else: # 'video' or 'stream'
+ if vid_path[i] != save_path: # new video
+ vid_path[i] = save_path
+ if isinstance(vid_writer[i], cv2.VideoWriter):
+ vid_writer[i].release() # release previous video writer
+ if vid_cap: # video
+ fps = vid_cap.get(cv2.CAP_PROP_FPS)
+ w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ else: # stream
+ fps, w, h = 30, im0.shape[1], im0.shape[0]
+ save_path = str(Path(save_path).with_suffix('.mp4')) # force *.mp4 suffix on results videos
+ vid_writer[i] = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
+ vid_writer[i].write(im0)
+
+ # Print time (inference-only)
+ LOGGER.info(f"{s}{'' if len(det) else '(no detections), '}{dt[1].dt * 1E3:.1f}ms")
+
+ # Print results
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {(1, 3, *imgsz)}' % t)
+ if save_txt or save_img:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ if update:
+ strip_optimizer(weights[0]) # update model (to fix SourceChangeWarning)
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)')
+ parser.add_argument('--source', type=str, default=ROOT / 'data/images', help='file/dir/URL/glob, 0 for webcam')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='(optional) dataset.yaml path')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=1000, help='maximum detections per image')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--view-img', action='store_true', help='show results')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-crop', action='store_true', help='save cropped prediction boxes')
+ parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
+ parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --classes 0, or --classes 0 2 3')
+ parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--visualize', action='store_true', help='visualize features')
+ parser.add_argument('--update', action='store_true', help='update all models')
+ parser.add_argument('--project', default=ROOT / 'runs/detect', help='save results to project/name')
+ parser.add_argument('--name', default='exp', help='save results to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--line-thickness', default=3, type=int, help='bounding box thickness (pixels)')
+ parser.add_argument('--hide-labels', default=False, action='store_true', help='hide labels')
+ parser.add_argument('--hide-conf', default=False, action='store_true', help='hide confidences')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/ipex/seg/export.py b/ipex/seg/export.py
new file mode 100644
index 000000000..0f26e63e9
--- /dev/null
+++ b/ipex/seg/export.py
@@ -0,0 +1,594 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Export a YOLOv5 PyTorch model to other formats. TensorFlow exports authored by https://github.com/zldrobit
+
+Format | `export.py --include` | Model
+--- | --- | ---
+PyTorch | - | yolov5s.pt
+TorchScript | `torchscript` | yolov5s.torchscript
+ONNX | `onnx` | yolov5s.onnx
+OpenVINO | `openvino` | yolov5s_openvino_model/
+TensorRT | `engine` | yolov5s.engine
+CoreML | `coreml` | yolov5s.mlmodel
+TensorFlow SavedModel | `saved_model` | yolov5s_saved_model/
+TensorFlow GraphDef | `pb` | yolov5s.pb
+TensorFlow Lite | `tflite` | yolov5s.tflite
+TensorFlow Edge TPU | `edgetpu` | yolov5s_edgetpu.tflite
+TensorFlow.js | `tfjs` | yolov5s_web_model/
+
+Requirements:
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu # CPU
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime-gpu openvino-dev tensorflow # GPU
+
+Usage:
+ $ python export.py --weights yolov5s.pt --include torchscript onnx openvino engine coreml tflite ...
+
+Inference:
+ $ python detect.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+
+TensorFlow.js:
+ $ cd .. && git clone https://github.com/zldrobit/tfjs-yolov5-example.git && cd tfjs-yolov5-example
+ $ npm install
+ $ ln -s ../../yolov5/yolov5s_web_model public/yolov5s_web_model
+ $ npm start
+"""
+
+import argparse
+import json
+import os
+import platform
+import subprocess
+import sys
+import time
+import warnings
+from pathlib import Path
+
+import pandas as pd
+import torch
+import yaml
+from torch.utils.mobile_optimizer import optimize_for_mobile
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+if platform.system() != 'Windows':
+ ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.experimental import attempt_load
+from models.yolo import Detect
+from utils.dataloaders import LoadImages
+from utils.general import (LOGGER, Profile, check_dataset, check_img_size, check_requirements, check_version,
+ check_yaml, colorstr, file_size, get_default_args, print_args, url2file)
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+def export_formats():
+ # YOLOv5 export formats
+ x = [
+ ['PyTorch', '-', '.pt', True, True],
+ ['TorchScript', 'torchscript', '.torchscript', True, True],
+ ['ONNX', 'onnx', '.onnx', True, True],
+ ['OpenVINO', 'openvino', '_openvino_model', True, False],
+ ['TensorRT', 'engine', '.engine', False, True],
+ ['CoreML', 'coreml', '.mlmodel', True, False],
+ ['TensorFlow SavedModel', 'saved_model', '_saved_model', True, True],
+ ['TensorFlow GraphDef', 'pb', '.pb', True, True],
+ ['TensorFlow Lite', 'tflite', '.tflite', True, False],
+ ['TensorFlow Edge TPU', 'edgetpu', '_edgetpu.tflite', False, False],
+ ['TensorFlow.js', 'tfjs', '_web_model', False, False],]
+ return pd.DataFrame(x, columns=['Format', 'Argument', 'Suffix', 'CPU', 'GPU'])
+
+
+def try_export(inner_func):
+ # YOLOv5 export decorator, i..e @try_export
+ inner_args = get_default_args(inner_func)
+
+ def outer_func(*args, **kwargs):
+ prefix = inner_args['prefix']
+ try:
+ with Profile() as dt:
+ f, model = inner_func(*args, **kwargs)
+ LOGGER.info(f'{prefix} export success ✅ {dt.t:.1f}s, saved as {f} ({file_size(f):.1f} MB)')
+ return f, model
+ except Exception as e:
+ LOGGER.info(f'{prefix} export failure ❌ {dt.t:.1f}s: {e}')
+ return None, None
+
+ return outer_func
+
+
+@try_export
+def export_torchscript(model, im, file, optimize, prefix=colorstr('TorchScript:')):
+ # YOLOv5 TorchScript model export
+ LOGGER.info(f'\n{prefix} starting export with torch {torch.__version__}...')
+ f = file.with_suffix('.torchscript')
+
+ ts = torch.jit.trace(model, im, strict=False)
+ d = {"shape": im.shape, "stride": int(max(model.stride)), "names": model.names}
+ extra_files = {'config.txt': json.dumps(d)} # torch._C.ExtraFilesMap()
+ if optimize: # https://pytorch.org/tutorials/recipes/mobile_interpreter.html
+ optimize_for_mobile(ts)._save_for_lite_interpreter(str(f), _extra_files=extra_files)
+ else:
+ ts.save(str(f), _extra_files=extra_files)
+ return f, None
+
+
+@try_export
+def export_onnx(model, im, file, opset, train, dynamic, simplify, prefix=colorstr('ONNX:')):
+ # YOLOv5 ONNX export
+ check_requirements(('onnx',))
+ import onnx
+
+ LOGGER.info(f'\n{prefix} starting export with onnx {onnx.__version__}...')
+ f = file.with_suffix('.onnx')
+
+ torch.onnx.export(
+ model.cpu() if dynamic else model, # --dynamic only compatible with cpu
+ im.cpu() if dynamic else im,
+ f,
+ verbose=False,
+ opset_version=opset,
+ training=torch.onnx.TrainingMode.TRAINING if train else torch.onnx.TrainingMode.EVAL,
+ do_constant_folding=not train,
+ input_names=['images'],
+ output_names=['output'],
+ dynamic_axes={
+ 'images': {
+ 0: 'batch',
+ 2: 'height',
+ 3: 'width'}, # shape(1,3,640,640)
+ 'output': {
+ 0: 'batch',
+ 1: 'anchors'} # shape(1,25200,85)
+ } if dynamic else None)
+
+ # Checks
+ model_onnx = onnx.load(f) # load onnx model
+ onnx.checker.check_model(model_onnx) # check onnx model
+
+ # Metadata
+ d = {'stride': int(max(model.stride)), 'names': model.names}
+ for k, v in d.items():
+ meta = model_onnx.metadata_props.add()
+ meta.key, meta.value = k, str(v)
+ onnx.save(model_onnx, f)
+
+ # Simplify
+ if simplify:
+ try:
+ cuda = torch.cuda.is_available()
+ check_requirements(('onnxruntime-gpu' if cuda else 'onnxruntime', 'onnx-simplifier>=0.4.1'))
+ import onnxsim
+
+ LOGGER.info(f'{prefix} simplifying with onnx-simplifier {onnxsim.__version__}...')
+ model_onnx, check = onnxsim.simplify(model_onnx)
+ assert check, 'assert check failed'
+ onnx.save(model_onnx, f)
+ except Exception as e:
+ LOGGER.info(f'{prefix} simplifier failure: {e}')
+ return f, model_onnx
+
+
+@try_export
+def export_openvino(model, file, half, prefix=colorstr('OpenVINO:')):
+ # YOLOv5 OpenVINO export
+ check_requirements(('openvino-dev',)) # requires openvino-dev: https://pypi.org/project/openvino-dev/
+ import openvino.inference_engine as ie
+
+ LOGGER.info(f'\n{prefix} starting export with openvino {ie.__version__}...')
+ f = str(file).replace('.pt', f'_openvino_model{os.sep}')
+
+ cmd = f"mo --input_model {file.with_suffix('.onnx')} --output_dir {f} --data_type {'FP16' if half else 'FP32'}"
+ subprocess.check_output(cmd.split()) # export
+ with open(Path(f) / file.with_suffix('.yaml').name, 'w') as g:
+ yaml.dump({'stride': int(max(model.stride)), 'names': model.names}, g) # add metadata.yaml
+ return f, None
+
+
+@try_export
+def export_coreml(model, im, file, int8, half, prefix=colorstr('CoreML:')):
+ # YOLOv5 CoreML export
+ check_requirements(('coremltools',))
+ import coremltools as ct
+
+ LOGGER.info(f'\n{prefix} starting export with coremltools {ct.__version__}...')
+ f = file.with_suffix('.mlmodel')
+
+ ts = torch.jit.trace(model, im, strict=False) # TorchScript model
+ ct_model = ct.convert(ts, inputs=[ct.ImageType('image', shape=im.shape, scale=1 / 255, bias=[0, 0, 0])])
+ bits, mode = (8, 'kmeans_lut') if int8 else (16, 'linear') if half else (32, None)
+ if bits < 32:
+ if platform.system() == 'Darwin': # quantization only supported on macOS
+ with warnings.catch_warnings():
+ warnings.filterwarnings("ignore", category=DeprecationWarning) # suppress numpy==1.20 float warning
+ ct_model = ct.models.neural_network.quantization_utils.quantize_weights(ct_model, bits, mode)
+ else:
+ print(f'{prefix} quantization only supported on macOS, skipping...')
+ ct_model.save(f)
+ return f, ct_model
+
+
+@try_export
+def export_engine(model, im, file, half, dynamic, simplify, workspace=4, verbose=False, prefix=colorstr('TensorRT:')):
+ # YOLOv5 TensorRT export https://developer.nvidia.com/tensorrt
+ assert im.device.type != 'cpu', 'export running on CPU but must be on GPU, i.e. `python export.py --device 0`'
+ try:
+ import tensorrt as trt
+ except Exception:
+ if platform.system() == 'Linux':
+ check_requirements(('nvidia-tensorrt',), cmds=('-U --index-url https://pypi.ngc.nvidia.com',))
+ import tensorrt as trt
+
+ if trt.__version__[0] == '7': # TensorRT 7 handling https://github.com/ultralytics/yolov5/issues/6012
+ grid = model.model[-1].anchor_grid
+ model.model[-1].anchor_grid = [a[..., :1, :1, :] for a in grid]
+ export_onnx(model, im, file, 12, False, dynamic, simplify) # opset 12
+ model.model[-1].anchor_grid = grid
+ else: # TensorRT >= 8
+ check_version(trt.__version__, '8.0.0', hard=True) # require tensorrt>=8.0.0
+ export_onnx(model, im, file, 13, False, dynamic, simplify) # opset 13
+ onnx = file.with_suffix('.onnx')
+
+ LOGGER.info(f'\n{prefix} starting export with TensorRT {trt.__version__}...')
+ assert onnx.exists(), f'failed to export ONNX file: {onnx}'
+ f = file.with_suffix('.engine') # TensorRT engine file
+ logger = trt.Logger(trt.Logger.INFO)
+ if verbose:
+ logger.min_severity = trt.Logger.Severity.VERBOSE
+
+ builder = trt.Builder(logger)
+ config = builder.create_builder_config()
+ config.max_workspace_size = workspace * 1 << 30
+ # config.set_memory_pool_limit(trt.MemoryPoolType.WORKSPACE, workspace << 30) # fix TRT 8.4 deprecation notice
+
+ flag = (1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH))
+ network = builder.create_network(flag)
+ parser = trt.OnnxParser(network, logger)
+ if not parser.parse_from_file(str(onnx)):
+ raise RuntimeError(f'failed to load ONNX file: {onnx}')
+
+ inputs = [network.get_input(i) for i in range(network.num_inputs)]
+ outputs = [network.get_output(i) for i in range(network.num_outputs)]
+ LOGGER.info(f'{prefix} Network Description:')
+ for inp in inputs:
+ LOGGER.info(f'{prefix}\tinput "{inp.name}" with shape {inp.shape} and dtype {inp.dtype}')
+ for out in outputs:
+ LOGGER.info(f'{prefix}\toutput "{out.name}" with shape {out.shape} and dtype {out.dtype}')
+
+ if dynamic:
+ if im.shape[0] <= 1:
+ LOGGER.warning(f"{prefix}WARNING: --dynamic model requires maximum --batch-size argument")
+ profile = builder.create_optimization_profile()
+ for inp in inputs:
+ profile.set_shape(inp.name, (1, *im.shape[1:]), (max(1, im.shape[0] // 2), *im.shape[1:]), im.shape)
+ config.add_optimization_profile(profile)
+
+ LOGGER.info(f'{prefix} building FP{16 if builder.platform_has_fast_fp16 and half else 32} engine in {f}')
+ if builder.platform_has_fast_fp16 and half:
+ config.set_flag(trt.BuilderFlag.FP16)
+ with builder.build_engine(network, config) as engine, open(f, 'wb') as t:
+ t.write(engine.serialize())
+ return f, None
+
+
+@try_export
+def export_saved_model(model,
+ im,
+ file,
+ dynamic,
+ tf_nms=False,
+ agnostic_nms=False,
+ topk_per_class=100,
+ topk_all=100,
+ iou_thres=0.45,
+ conf_thres=0.25,
+ keras=False,
+ prefix=colorstr('TensorFlow SavedModel:')):
+ # YOLOv5 TensorFlow SavedModel export
+ import tensorflow as tf
+ from tensorflow.python.framework.convert_to_constants import convert_variables_to_constants_v2
+
+ from models.tf import TFModel
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ f = str(file).replace('.pt', '_saved_model')
+ batch_size, ch, *imgsz = list(im.shape) # BCHW
+
+ tf_model = TFModel(cfg=model.yaml, model=model, nc=model.nc, imgsz=imgsz)
+ im = tf.zeros((batch_size, *imgsz, ch)) # BHWC order for TensorFlow
+ _ = tf_model.predict(im, tf_nms, agnostic_nms, topk_per_class, topk_all, iou_thres, conf_thres)
+ inputs = tf.keras.Input(shape=(*imgsz, ch), batch_size=None if dynamic else batch_size)
+ outputs = tf_model.predict(inputs, tf_nms, agnostic_nms, topk_per_class, topk_all, iou_thres, conf_thres)
+ keras_model = tf.keras.Model(inputs=inputs, outputs=outputs)
+ keras_model.trainable = False
+ keras_model.summary()
+ if keras:
+ keras_model.save(f, save_format='tf')
+ else:
+ spec = tf.TensorSpec(keras_model.inputs[0].shape, keras_model.inputs[0].dtype)
+ m = tf.function(lambda x: keras_model(x)) # full model
+ m = m.get_concrete_function(spec)
+ frozen_func = convert_variables_to_constants_v2(m)
+ tfm = tf.Module()
+ tfm.__call__ = tf.function(lambda x: frozen_func(x)[:4] if tf_nms else frozen_func(x)[0], [spec])
+ tfm.__call__(im)
+ tf.saved_model.save(tfm,
+ f,
+ options=tf.saved_model.SaveOptions(experimental_custom_gradients=False) if check_version(
+ tf.__version__, '2.6') else tf.saved_model.SaveOptions())
+ return f, keras_model
+
+
+@try_export
+def export_pb(keras_model, file, prefix=colorstr('TensorFlow GraphDef:')):
+ # YOLOv5 TensorFlow GraphDef *.pb export https://github.com/leimao/Frozen_Graph_TensorFlow
+ import tensorflow as tf
+ from tensorflow.python.framework.convert_to_constants import convert_variables_to_constants_v2
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ f = file.with_suffix('.pb')
+
+ m = tf.function(lambda x: keras_model(x)) # full model
+ m = m.get_concrete_function(tf.TensorSpec(keras_model.inputs[0].shape, keras_model.inputs[0].dtype))
+ frozen_func = convert_variables_to_constants_v2(m)
+ frozen_func.graph.as_graph_def()
+ tf.io.write_graph(graph_or_graph_def=frozen_func.graph, logdir=str(f.parent), name=f.name, as_text=False)
+ return f, None
+
+
+@try_export
+def export_tflite(keras_model, im, file, int8, data, nms, agnostic_nms, prefix=colorstr('TensorFlow Lite:')):
+ # YOLOv5 TensorFlow Lite export
+ import tensorflow as tf
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ batch_size, ch, *imgsz = list(im.shape) # BCHW
+ f = str(file).replace('.pt', '-fp16.tflite')
+
+ converter = tf.lite.TFLiteConverter.from_keras_model(keras_model)
+ converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS]
+ converter.target_spec.supported_types = [tf.float16]
+ converter.optimizations = [tf.lite.Optimize.DEFAULT]
+ if int8:
+ from models.tf import representative_dataset_gen
+ dataset = LoadImages(check_dataset(check_yaml(data))['train'], img_size=imgsz, auto=False)
+ converter.representative_dataset = lambda: representative_dataset_gen(dataset, ncalib=100)
+ converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS_INT8]
+ converter.target_spec.supported_types = []
+ converter.inference_input_type = tf.uint8 # or tf.int8
+ converter.inference_output_type = tf.uint8 # or tf.int8
+ converter.experimental_new_quantizer = True
+ f = str(file).replace('.pt', '-int8.tflite')
+ if nms or agnostic_nms:
+ converter.target_spec.supported_ops.append(tf.lite.OpsSet.SELECT_TF_OPS)
+
+ tflite_model = converter.convert()
+ open(f, "wb").write(tflite_model)
+ return f, None
+
+
+@try_export
+def export_edgetpu(file, prefix=colorstr('Edge TPU:')):
+ # YOLOv5 Edge TPU export https://coral.ai/docs/edgetpu/models-intro/
+ cmd = 'edgetpu_compiler --version'
+ help_url = 'https://coral.ai/docs/edgetpu/compiler/'
+ assert platform.system() == 'Linux', f'export only supported on Linux. See {help_url}'
+ if subprocess.run(f'{cmd} >/dev/null', shell=True).returncode != 0:
+ LOGGER.info(f'\n{prefix} export requires Edge TPU compiler. Attempting install from {help_url}')
+ sudo = subprocess.run('sudo --version >/dev/null', shell=True).returncode == 0 # sudo installed on system
+ for c in (
+ 'curl https://packages.cloud.google.com/apt/doc/apt-key.gpg | sudo apt-key add -',
+ 'echo "deb https://packages.cloud.google.com/apt coral-edgetpu-stable main" | sudo tee /etc/apt/sources.list.d/coral-edgetpu.list',
+ 'sudo apt-get update', 'sudo apt-get install edgetpu-compiler'):
+ subprocess.run(c if sudo else c.replace('sudo ', ''), shell=True, check=True)
+ ver = subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1]
+
+ LOGGER.info(f'\n{prefix} starting export with Edge TPU compiler {ver}...')
+ f = str(file).replace('.pt', '-int8_edgetpu.tflite') # Edge TPU model
+ f_tfl = str(file).replace('.pt', '-int8.tflite') # TFLite model
+
+ cmd = f"edgetpu_compiler -s -d -k 10 --out_dir {file.parent} {f_tfl}"
+ subprocess.run(cmd.split(), check=True)
+ return f, None
+
+
+@try_export
+def export_tfjs(file, prefix=colorstr('TensorFlow.js:')):
+ # YOLOv5 TensorFlow.js export
+ check_requirements(('tensorflowjs',))
+ import re
+
+ import tensorflowjs as tfjs
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflowjs {tfjs.__version__}...')
+ f = str(file).replace('.pt', '_web_model') # js dir
+ f_pb = file.with_suffix('.pb') # *.pb path
+ f_json = f'{f}/model.json' # *.json path
+
+ cmd = f'tensorflowjs_converter --input_format=tf_frozen_model ' \
+ f'--output_node_names=Identity,Identity_1,Identity_2,Identity_3 {f_pb} {f}'
+ subprocess.run(cmd.split())
+
+ json = Path(f_json).read_text()
+ with open(f_json, 'w') as j: # sort JSON Identity_* in ascending order
+ subst = re.sub(
+ r'{"outputs": {"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}}}', r'{"outputs": {"Identity": {"name": "Identity"}, '
+ r'"Identity_1": {"name": "Identity_1"}, '
+ r'"Identity_2": {"name": "Identity_2"}, '
+ r'"Identity_3": {"name": "Identity_3"}}}', json)
+ j.write(subst)
+ return f, None
+
+
+@smart_inference_mode()
+def run(
+ data=ROOT / 'data/coco128.yaml', # 'dataset.yaml path'
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=(640, 640), # image (height, width)
+ batch_size=1, # batch size
+ device='cpu', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ include=('torchscript', 'onnx'), # include formats
+ half=False, # FP16 half-precision export
+ inplace=False, # set YOLOv5 Detect() inplace=True
+ train=False, # model.train() mode
+ keras=False, # use Keras
+ optimize=False, # TorchScript: optimize for mobile
+ int8=False, # CoreML/TF INT8 quantization
+ dynamic=False, # ONNX/TF/TensorRT: dynamic axes
+ simplify=False, # ONNX: simplify model
+ opset=12, # ONNX: opset version
+ verbose=False, # TensorRT: verbose log
+ workspace=4, # TensorRT: workspace size (GB)
+ nms=False, # TF: add NMS to model
+ agnostic_nms=False, # TF: add agnostic NMS to model
+ topk_per_class=100, # TF.js NMS: topk per class to keep
+ topk_all=100, # TF.js NMS: topk for all classes to keep
+ iou_thres=0.45, # TF.js NMS: IoU threshold
+ conf_thres=0.25, # TF.js NMS: confidence threshold
+):
+ t = time.time()
+ include = [x.lower() for x in include] # to lowercase
+ fmts = tuple(export_formats()['Argument'][1:]) # --include arguments
+ flags = [x in include for x in fmts]
+ assert sum(flags) == len(include), f'ERROR: Invalid --include {include}, valid --include arguments are {fmts}'
+ jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs = flags # export booleans
+ file = Path(url2file(weights) if str(weights).startswith(('http:/', 'https:/')) else weights) # PyTorch weights
+
+ # Load PyTorch model
+ device = select_device(device)
+ if half:
+ assert device.type != 'cpu' or coreml, '--half only compatible with GPU export, i.e. use --device 0'
+ assert not dynamic, '--half not compatible with --dynamic, i.e. use either --half or --dynamic but not both'
+ model = attempt_load(weights, device=device, inplace=True, fuse=True) # load FP32 model
+
+ # Checks
+ imgsz *= 2 if len(imgsz) == 1 else 1 # expand
+ if optimize:
+ assert device.type == 'cpu', '--optimize not compatible with cuda devices, i.e. use --device cpu'
+
+ # Input
+ gs = int(max(model.stride)) # grid size (max stride)
+ imgsz = [check_img_size(x, gs) for x in imgsz] # verify img_size are gs-multiples
+ im = torch.zeros(batch_size, 3, *imgsz).to(device) # image size(1,3,320,192) BCHW iDetection
+
+ # Update model
+ model.train() if train else model.eval() # training mode = no Detect() layer grid construction
+ for k, m in model.named_modules():
+ if isinstance(m, Detect):
+ m.inplace = inplace
+ m.dynamic = dynamic
+ m.export = True
+
+ for _ in range(2):
+ y = model(im) # dry runs
+ if half and not coreml:
+ im, model = im.half(), model.half() # to FP16
+ shape = tuple((y[0] if isinstance(y, tuple) else y).shape) # model output shape
+ LOGGER.info(f"\n{colorstr('PyTorch:')} starting from {file} with output shape {shape} ({file_size(file):.1f} MB)")
+
+ # Exports
+ f = [''] * 10 # exported filenames
+ warnings.filterwarnings(action='ignore', category=torch.jit.TracerWarning) # suppress TracerWarning
+ if jit:
+ f[0], _ = export_torchscript(model, im, file, optimize)
+ if engine: # TensorRT required before ONNX
+ f[1], _ = export_engine(model, im, file, half, dynamic, simplify, workspace, verbose)
+ if onnx or xml: # OpenVINO requires ONNX
+ f[2], _ = export_onnx(model, im, file, opset, train, dynamic, simplify)
+ if xml: # OpenVINO
+ f[3], _ = export_openvino(model, file, half)
+ if coreml:
+ f[4], _ = export_coreml(model, im, file, int8, half)
+
+ # TensorFlow Exports
+ if any((saved_model, pb, tflite, edgetpu, tfjs)):
+ if int8 or edgetpu: # TFLite --int8 bug https://github.com/ultralytics/yolov5/issues/5707
+ check_requirements(('flatbuffers==1.12',)) # required before `import tensorflow`
+ assert not tflite or not tfjs, 'TFLite and TF.js models must be exported separately, please pass only one type.'
+ f[5], model = export_saved_model(model.cpu(),
+ im,
+ file,
+ dynamic,
+ tf_nms=nms or agnostic_nms or tfjs,
+ agnostic_nms=agnostic_nms or tfjs,
+ topk_per_class=topk_per_class,
+ topk_all=topk_all,
+ iou_thres=iou_thres,
+ conf_thres=conf_thres,
+ keras=keras)
+ if pb or tfjs: # pb prerequisite to tfjs
+ f[6], _ = export_pb(model, file)
+ if tflite or edgetpu:
+ f[7], _ = export_tflite(model, im, file, int8 or edgetpu, data=data, nms=nms, agnostic_nms=agnostic_nms)
+ if edgetpu:
+ f[8], _ = export_edgetpu(file)
+ if tfjs:
+ f[9], _ = export_tfjs(file)
+
+ # Finish
+ f = [str(x) for x in f if x] # filter out '' and None
+ if any(f):
+ h = '--half' if half else '' # --half FP16 inference arg
+ LOGGER.info(f'\nExport complete ({time.time() - t:.1f}s)'
+ f"\nResults saved to {colorstr('bold', file.parent.resolve())}"
+ f"\nDetect: python detect.py --weights {f[-1]} {h}"
+ f"\nValidate: python val.py --weights {f[-1]} {h}"
+ f"\nPyTorch Hub: model = torch.hub.load('ultralytics/yolov5', 'custom', '{f[-1]}')"
+ f"\nVisualize: https://netron.app")
+ return f # return list of exported files/dirs
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model.pt path(s)')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640, 640], help='image (h, w)')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--device', default='cpu', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--half', action='store_true', help='FP16 half-precision export')
+ parser.add_argument('--inplace', action='store_true', help='set YOLOv5 Detect() inplace=True')
+ parser.add_argument('--train', action='store_true', help='model.train() mode')
+ parser.add_argument('--keras', action='store_true', help='TF: use Keras')
+ parser.add_argument('--optimize', action='store_true', help='TorchScript: optimize for mobile')
+ parser.add_argument('--int8', action='store_true', help='CoreML/TF INT8 quantization')
+ parser.add_argument('--dynamic', action='store_true', help='ONNX/TF/TensorRT: dynamic axes')
+ parser.add_argument('--simplify', action='store_true', help='ONNX: simplify model')
+ parser.add_argument('--opset', type=int, default=12, help='ONNX: opset version')
+ parser.add_argument('--verbose', action='store_true', help='TensorRT: verbose log')
+ parser.add_argument('--workspace', type=int, default=4, help='TensorRT: workspace size (GB)')
+ parser.add_argument('--nms', action='store_true', help='TF: add NMS to model')
+ parser.add_argument('--agnostic-nms', action='store_true', help='TF: add agnostic NMS to model')
+ parser.add_argument('--topk-per-class', type=int, default=100, help='TF.js NMS: topk per class to keep')
+ parser.add_argument('--topk-all', type=int, default=100, help='TF.js NMS: topk for all classes to keep')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='TF.js NMS: IoU threshold')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='TF.js NMS: confidence threshold')
+ parser.add_argument('--include',
+ nargs='+',
+ default=['torchscript'],
+ help='torchscript, onnx, openvino, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ for opt.weights in (opt.weights if isinstance(opt.weights, list) else [opt.weights]):
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/ipex/seg/hubconf.py b/ipex/seg/hubconf.py
new file mode 100644
index 000000000..33fc87930
--- /dev/null
+++ b/ipex/seg/hubconf.py
@@ -0,0 +1,164 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+PyTorch Hub models https://pytorch.org/hub/ultralytics_yolov5
+
+Usage:
+ import torch
+ model = torch.hub.load('ultralytics/yolov5', 'yolov5s')
+ model = torch.hub.load('ultralytics/yolov5:master', 'custom', 'path/to/yolov5s.onnx') # custom model from branch
+"""
+
+import torch
+
+
+def _create(name, pretrained=True, channels=3, classes=80, autoshape=True, verbose=True, device=None):
+ """Creates or loads a YOLOv5 model
+
+ Arguments:
+ name (str): model name 'yolov5s' or path 'path/to/best.pt'
+ pretrained (bool): load pretrained weights into the model
+ channels (int): number of input channels
+ classes (int): number of model classes
+ autoshape (bool): apply YOLOv5 .autoshape() wrapper to model
+ verbose (bool): print all information to screen
+ device (str, torch.device, None): device to use for model parameters
+
+ Returns:
+ YOLOv5 model
+ """
+ from pathlib import Path
+
+ from models.common import AutoShape, DetectMultiBackend
+ from models.experimental import attempt_load
+ from models.yolo import ClassificationModel, DetectionModel
+ from utils.downloads import attempt_download
+ from utils.general import LOGGER, check_requirements, intersect_dicts, logging
+ from utils.torch_utils import select_device
+
+ if not verbose:
+ LOGGER.setLevel(logging.WARNING)
+ check_requirements(exclude=('tensorboard', 'thop', 'opencv-python'))
+ name = Path(name)
+ path = name.with_suffix('.pt') if name.suffix == '' and not name.is_dir() else name # checkpoint path
+ try:
+ device = select_device(device)
+ if pretrained and channels == 3 and classes == 80:
+ try:
+ model = DetectMultiBackend(path, device=device, fuse=autoshape) # detection model
+ if autoshape:
+ if model.pt and isinstance(model.model, ClassificationModel):
+ LOGGER.warning('WARNING: YOLOv5 v6.2 ClassificationModel is not yet AutoShape compatible. '
+ 'You must pass torch tensors in BCHW to this model, i.e. shape(1,3,224,224).')
+ else:
+ model = AutoShape(model) # for file/URI/PIL/cv2/np inputs and NMS
+ except Exception:
+ model = attempt_load(path, device=device, fuse=False) # arbitrary model
+ else:
+ cfg = list((Path(__file__).parent / 'models').rglob(f'{path.stem}.yaml'))[0] # model.yaml path
+ model = DetectionModel(cfg, channels, classes) # create model
+ if pretrained:
+ ckpt = torch.load(attempt_download(path), map_location=device) # load
+ csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
+ csd = intersect_dicts(csd, model.state_dict(), exclude=['anchors']) # intersect
+ model.load_state_dict(csd, strict=False) # load
+ if len(ckpt['model'].names) == classes:
+ model.names = ckpt['model'].names # set class names attribute
+ if not verbose:
+ LOGGER.setLevel(logging.INFO) # reset to default
+ return model.to(device)
+
+ except Exception as e:
+ help_url = 'https://github.com/ultralytics/yolov5/issues/36'
+ s = f'{e}. Cache may be out of date, try `force_reload=True` or see {help_url} for help.'
+ raise Exception(s) from e
+
+
+def custom(path='path/to/model.pt', autoshape=True, _verbose=True, device=None):
+ # YOLOv5 custom or local model
+ return _create(path, autoshape=autoshape, verbose=_verbose, device=device)
+
+
+def yolov5n(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-nano model https://github.com/ultralytics/yolov5
+ return _create('yolov5n', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5s(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-small model https://github.com/ultralytics/yolov5
+ return _create('yolov5s', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5m(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-medium model https://github.com/ultralytics/yolov5
+ return _create('yolov5m', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5l(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-large model https://github.com/ultralytics/yolov5
+ return _create('yolov5l', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5x(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-xlarge model https://github.com/ultralytics/yolov5
+ return _create('yolov5x', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5n6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-nano-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5n6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5s6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-small-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5s6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5m6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-medium-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5m6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5l6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-large-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5l6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5x6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-xlarge-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5x6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+if __name__ == '__main__':
+ import argparse
+ from pathlib import Path
+
+ import numpy as np
+ from PIL import Image
+
+ from utils.general import cv2, print_args
+
+ # Argparser
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--model', type=str, default='yolov5s', help='model name')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+
+ # Model
+ model = _create(name=opt.model, pretrained=True, channels=3, classes=80, autoshape=True, verbose=True)
+ # model = custom(path='path/to/model.pt') # custom
+
+ # Images
+ imgs = [
+ 'data/images/zidane.jpg', # filename
+ Path('data/images/zidane.jpg'), # Path
+ 'https://ultralytics.com/images/zidane.jpg', # URI
+ cv2.imread('data/images/bus.jpg')[:, :, ::-1], # OpenCV
+ Image.open('data/images/bus.jpg'), # PIL
+ np.zeros((320, 640, 3))] # numpy
+
+ # Inference
+ results = model(imgs, size=320) # batched inference
+
+ # Results
+ results.print()
+ results.save()
diff --git a/ipex/seg/models/__init__.py b/ipex/seg/models/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/ipex/seg/models/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/ipex/seg/models/common.py b/ipex/seg/models/common.py
new file mode 100644
index 000000000..d0f3f60a8
--- /dev/null
+++ b/ipex/seg/models/common.py
@@ -0,0 +1,885 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Common modules
+"""
+
+import json
+import math
+import platform
+import warnings
+from collections import OrderedDict, namedtuple
+from copy import copy
+from pathlib import Path
+import sys
+sys.path.insert(0,'.')
+import cv2
+import numpy as np
+import pandas as pd
+import requests
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+from PIL import Image
+from torch.cuda import amp
+
+from utils.dataloaders import exif_transpose, letterbox
+from utils.general import (LOGGER, ROOT, Profile, check_requirements, check_suffix, check_version, colorstr,
+ increment_path, make_divisible, non_max_suppression, scale_coords, xywh2xyxy, xyxy2xywh,
+ yaml_load)
+from utils.plots import Annotator, colors, save_one_box
+from utils.torch_utils import copy_attr, smart_inference_mode
+
+
+def autopad(k, p=None): # kernel, padding
+ # Pad to 'same'
+ if p is None:
+ p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
+ return p
+
+
+class ImplicitA(nn.Module):
+ def __init__(self, channel):
+ super(ImplicitA, self).__init__()
+ self.channel = channel
+ self.implicit = nn.Parameter(torch.zeros(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, std=.02)
+
+ def forward(self, x):
+ return self.implicit + x
+
+
+class ImplicitM(nn.Module):
+ def __init__(self, channel):
+ super(ImplicitM, self).__init__()
+ self.channel = channel
+ self.implicit = nn.Parameter(torch.ones(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=1., std=.02)
+
+ def forward(self, x):
+ return self.implicit * x
+
+
+class MP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, k=2):
+ super(MP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class SP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, k=3, s=1):
+ super(SP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=s, padding=k // 2)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class ReOrg(nn.Module):
+ def __init__(self):
+ super(ReOrg, self).__init__()
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1)
+
+
+class Conv(nn.Module):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ def forward(self, x):
+ return self.act(self.bn(self.conv(x)))
+
+ def forward_fuse(self, x):
+ return self.act(self.conv(x))
+
+
+class DWConv(Conv):
+ # Depth-wise convolution class
+ def __init__(self, c1, c2, k=1, s=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__(c1, c2, k, s, g=math.gcd(c1, c2), act=act)
+
+
+class DWConvTranspose2d(nn.ConvTranspose2d):
+ # Depth-wise transpose convolution class
+ def __init__(self, c1, c2, k=1, s=1, p1=0, p2=0): # ch_in, ch_out, kernel, stride, padding, padding_out
+ super().__init__(c1, c2, k, s, p1, p2, groups=math.gcd(c1, c2))
+
+
+class TransformerLayer(nn.Module):
+ # Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance)
+ def __init__(self, c, num_heads):
+ super().__init__()
+ self.q = nn.Linear(c, c, bias=False)
+ self.k = nn.Linear(c, c, bias=False)
+ self.v = nn.Linear(c, c, bias=False)
+ self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads)
+ self.fc1 = nn.Linear(c, c, bias=False)
+ self.fc2 = nn.Linear(c, c, bias=False)
+
+ def forward(self, x):
+ x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x
+ x = self.fc2(self.fc1(x)) + x
+ return x
+
+
+class TransformerBlock(nn.Module):
+ # Vision Transformer https://arxiv.org/abs/2010.11929
+ def __init__(self, c1, c2, num_heads, num_layers):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+ self.linear = nn.Linear(c2, c2) # learnable position embedding
+ self.tr = nn.Sequential(*(TransformerLayer(c2, num_heads) for _ in range(num_layers)))
+ self.c2 = c2
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ b, _, w, h = x.shape
+ p = x.flatten(2).permute(2, 0, 1)
+ return self.tr(p + self.linear(p)).permute(1, 2, 0).reshape(b, self.c2, w, h)
+
+
+class Bottleneck(nn.Module):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2, 3, 1, g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class BottleneckCSP(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False)
+ self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(cv2, cv3)
+ self.act = nn.SiLU()
+ self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(self.act(self.bn(torch.cat((y1, y2), 1))))
+
+
+class CrossConv(nn.Module):
+ # Cross Convolution Downsample
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False):
+ # ch_in, ch_out, kernel, stride, groups, expansion, shortcut
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, (1, k), (1, s))
+ self.cv2 = Conv(c_, c2, (k, 1), (s, 1), g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class C3(nn.Module):
+ # CSP Bottleneck with 3 convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)
+ self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
+
+ def forward(self, x):
+ return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))
+
+
+class C3x(C3):
+ # C3 module with cross-convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = nn.Sequential(*(CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)))
+
+
+class C3TR(C3):
+ # C3 module with TransformerBlock()
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = TransformerBlock(c_, c_, 4, n)
+
+
+class C3SPP(C3):
+ # C3 module with SPP()
+ def __init__(self, c1, c2, k=(5, 9, 13), n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = SPP(c_, c_, k)
+
+
+class C3Ghost(C3):
+ # C3 module with GhostBottleneck()
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*(GhostBottleneck(c_, c_) for _ in range(n)))
+
+
+class SPP(nn.Module):
+ # Spatial Pyramid Pooling (SPP) layer https://arxiv.org/abs/1406.4729
+ def __init__(self, c1, c2, k=(5, 9, 13)):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+
+ def forward(self, x):
+ x = self.cv1(x)
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
+ return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))
+
+
+class SPPF(nn.Module):
+ # Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
+ def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * 4, c2, 1, 1)
+ self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(torch.cat((x, y1, y2, self.m(y2)), 1))
+
+
+class SPPCSPC(nn.Module):
+ # CSP SPP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super(SPPCSPC, self).__init__()
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 1)
+ self.cv4 = Conv(c_, c_, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+ self.cv5 = Conv(4 * c_, c_, 1, 1)
+ self.cv6 = Conv(c_, c_, 3, 1)
+ self.cv7 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x1 = self.cv4(self.cv3(self.cv1(x)))
+ y1 = self.cv6(self.cv5(torch.cat([x1] + [m(x1) for m in self.m], 1)))
+ y2 = self.cv2(x)
+ return self.cv7(torch.cat((y1, y2), dim=1))
+
+
+class Focus(nn.Module):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
+ # self.contract = Contract(gain=2)
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return self.conv(torch.cat((x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]), 1))
+ # return self.conv(self.contract(x))
+
+
+class GhostConv(nn.Module):
+ # Ghost Convolution https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
+ super().__init__()
+ c_ = c2 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, k, s, None, g, act)
+ self.cv2 = Conv(c_, c_, 5, 1, None, c_, act)
+
+ def forward(self, x):
+ y = self.cv1(x)
+ return torch.cat((y, self.cv2(y)), 1)
+
+
+class GhostBottleneck(nn.Module):
+ # Ghost Bottleneck https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride
+ super().__init__()
+ c_ = c2 // 2
+ self.conv = nn.Sequential(
+ GhostConv(c1, c_, 1, 1), # pw
+ DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw
+ GhostConv(c_, c2, 1, 1, act=False)) # pw-linear
+ self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False), Conv(c1, c2, 1, 1,
+ act=False)) if s == 2 else nn.Identity()
+
+ def forward(self, x):
+ return self.conv(x) + self.shortcut(x)
+
+
+class Contract(nn.Module):
+ # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ b, c, h, w = x.size() # assert (h / s == 0) and (W / s == 0), 'Indivisible gain'
+ s = self.gain
+ x = x.view(b, c, h // s, s, w // s, s) # x(1,64,40,2,40,2)
+ x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
+ return x.view(b, c * s * s, h // s, w // s) # x(1,256,40,40)
+
+
+class Expand(nn.Module):
+ # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ b, c, h, w = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
+ s = self.gain
+ x = x.view(b, s, s, c // s ** 2, h, w) # x(1,2,2,16,80,80)
+ x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
+ return x.view(b, c // s ** 2, h * s, w * s) # x(1,16,160,160)
+
+
+class Concat(nn.Module):
+ # Concatenate a list of tensors along dimension
+ def __init__(self, dimension=1):
+ super().__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return torch.cat(x, self.d)
+
+
+class DetectMultiBackend(nn.Module):
+ # YOLOv5 MultiBackend class for python inference on various backends
+ def __init__(self, weights='yolov5s.pt', device=torch.device('cpu'), dnn=False, data=None, fp16=False, fuse=True):
+ # Usage:
+ # PyTorch: weights = *.pt
+ # TorchScript: *.torchscript
+ # ONNX Runtime: *.onnx
+ # ONNX OpenCV DNN: *.onnx with --dnn
+ # OpenVINO: *.xml
+ # CoreML: *.mlmodel
+ # TensorRT: *.engine
+ # TensorFlow SavedModel: *_saved_model
+ # TensorFlow GraphDef: *.pb
+ # TensorFlow Lite: *.tflite
+ # TensorFlow Edge TPU: *_edgetpu.tflite
+ from models.experimental import attempt_download, attempt_load # scoped to avoid circular import
+
+ super().__init__()
+ w = str(weights[0] if isinstance(weights, list) else weights)
+ pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs = self._model_type(w) # get backend
+ w = attempt_download(w) # download if not local
+ fp16 &= pt or jit or onnx or engine # FP16
+ stride = 32 # default stride
+
+ if pt: # PyTorch
+ model = attempt_load(weights if isinstance(weights, list) else w, device=device, inplace=True, fuse=fuse)
+ stride = max(int(model.stride.max()), 32) # model stride
+ names = model.module.names if hasattr(model, 'module') else model.names # get class names
+ model.half() if fp16 else model.float()
+ self.model = model # explicitly assign for to(), cpu(), cuda(), half()
+ segmentation_model = type(model.model[-1]).__name__ in ['Segment', 'ISegment', 'IRSegment']
+ elif jit: # TorchScript
+ LOGGER.info(f'Loading {w} for TorchScript inference...')
+ extra_files = {'config.txt': ''} # model metadata
+ model = torch.jit.load(w, _extra_files=extra_files)
+ model.half() if fp16 else model.float()
+ if extra_files['config.txt']: # load metadata dict
+ d = json.loads(extra_files['config.txt'],
+ object_hook=lambda d: {int(k) if k.isdigit() else k: v
+ for k, v in d.items()})
+ stride, names = int(d['stride']), d['names']
+ elif dnn: # ONNX OpenCV DNN
+ LOGGER.info(f'Loading {w} for ONNX OpenCV DNN inference...')
+ check_requirements(('opencv-python>=4.5.4',))
+ net = cv2.dnn.readNetFromONNX(w)
+ elif onnx: # ONNX Runtime
+ LOGGER.info(f'Loading {w} for ONNX Runtime inference...')
+ cuda = torch.cuda.is_available() and device.type != 'cpu'
+ check_requirements(('onnx', 'onnxruntime-gpu' if cuda else 'onnxruntime'))
+ import onnxruntime
+ providers = ['CUDAExecutionProvider', 'CPUExecutionProvider'] if cuda else ['CPUExecutionProvider']
+ session = onnxruntime.InferenceSession(w, providers=providers)
+ meta = session.get_modelmeta().custom_metadata_map # metadata
+ if 'stride' in meta:
+ stride, names = int(meta['stride']), eval(meta['names'])
+ elif xml: # OpenVINO
+ LOGGER.info(f'Loading {w} for OpenVINO inference...')
+ check_requirements(('openvino',)) # requires openvino-dev: https://pypi.org/project/openvino-dev/
+ from openvino.runtime import Core, Layout, get_batch
+ ie = Core()
+ if not Path(w).is_file(): # if not *.xml
+ w = next(Path(w).glob('*.xml')) # get *.xml file from *_openvino_model dir
+ network = ie.read_model(model=w, weights=Path(w).with_suffix('.bin'))
+ if network.get_parameters()[0].get_layout().empty:
+ network.get_parameters()[0].set_layout(Layout("NCHW"))
+ batch_dim = get_batch(network)
+ if batch_dim.is_static:
+ batch_size = batch_dim.get_length()
+ executable_network = ie.compile_model(network, device_name="CPU") # device_name="MYRIAD" for Intel NCS2
+ output_layer = next(iter(executable_network.outputs))
+ meta = Path(w).with_suffix('.yaml')
+ if meta.exists():
+ stride, names = self._load_metadata(meta) # load metadata
+ elif engine: # TensorRT
+ LOGGER.info(f'Loading {w} for TensorRT inference...')
+ import tensorrt as trt # https://developer.nvidia.com/nvidia-tensorrt-download
+ check_version(trt.__version__, '7.0.0', hard=True) # require tensorrt>=7.0.0
+ if device.type == 'cpu':
+ device = torch.device('cuda:0')
+ Binding = namedtuple('Binding', ('name', 'dtype', 'shape', 'data', 'ptr'))
+ logger = trt.Logger(trt.Logger.INFO)
+ with open(w, 'rb') as f, trt.Runtime(logger) as runtime:
+ model = runtime.deserialize_cuda_engine(f.read())
+ context = model.create_execution_context()
+ bindings = OrderedDict()
+ fp16 = False # default updated below
+ dynamic = False
+ for index in range(model.num_bindings):
+ name = model.get_binding_name(index)
+ dtype = trt.nptype(model.get_binding_dtype(index))
+ if model.binding_is_input(index):
+ if -1 in tuple(model.get_binding_shape(index)): # dynamic
+ dynamic = True
+ context.set_binding_shape(index, tuple(model.get_profile_shape(0, index)[2]))
+ if dtype == np.float16:
+ fp16 = True
+ shape = tuple(context.get_binding_shape(index))
+ im = torch.from_numpy(np.empty(shape, dtype=dtype)).to(device)
+ bindings[name] = Binding(name, dtype, shape, im, int(im.data_ptr()))
+ binding_addrs = OrderedDict((n, d.ptr) for n, d in bindings.items())
+ batch_size = bindings['images'].shape[0] # if dynamic, this is instead max batch size
+ elif coreml: # CoreML
+ LOGGER.info(f'Loading {w} for CoreML inference...')
+ import coremltools as ct
+ model = ct.models.MLModel(w)
+ else: # TensorFlow (SavedModel, GraphDef, Lite, Edge TPU)
+ if saved_model: # SavedModel
+ LOGGER.info(f'Loading {w} for TensorFlow SavedModel inference...')
+ import tensorflow as tf
+ keras = False # assume TF1 saved_model
+ model = tf.keras.models.load_model(w) if keras else tf.saved_model.load(w)
+ elif pb: # GraphDef https://www.tensorflow.org/guide/migrate#a_graphpb_or_graphpbtxt
+ LOGGER.info(f'Loading {w} for TensorFlow GraphDef inference...')
+ import tensorflow as tf
+
+ def wrap_frozen_graph(gd, inputs, outputs):
+ x = tf.compat.v1.wrap_function(lambda: tf.compat.v1.import_graph_def(gd, name=""), []) # wrapped
+ ge = x.graph.as_graph_element
+ return x.prune(tf.nest.map_structure(ge, inputs), tf.nest.map_structure(ge, outputs))
+
+ gd = tf.Graph().as_graph_def() # graph_def
+ with open(w, 'rb') as f:
+ gd.ParseFromString(f.read())
+ frozen_func = wrap_frozen_graph(gd, inputs="x:0", outputs="Identity:0")
+ elif tflite or edgetpu: # https://www.tensorflow.org/lite/guide/python#install_tensorflow_lite_for_python
+ try: # https://coral.ai/docs/edgetpu/tflite-python/#update-existing-tf-lite-code-for-the-edge-tpu
+ from tflite_runtime.interpreter import Interpreter, load_delegate
+ except ImportError:
+ import tensorflow as tf
+ Interpreter, load_delegate = tf.lite.Interpreter, tf.lite.experimental.load_delegate,
+ if edgetpu: # Edge TPU https://coral.ai/software/#edgetpu-runtime
+ LOGGER.info(f'Loading {w} for TensorFlow Lite Edge TPU inference...')
+ delegate = {
+ 'Linux': 'libedgetpu.so.1',
+ 'Darwin': 'libedgetpu.1.dylib',
+ 'Windows': 'edgetpu.dll'}[platform.system()]
+ interpreter = Interpreter(model_path=w, experimental_delegates=[load_delegate(delegate)])
+ else: # Lite
+ LOGGER.info(f'Loading {w} for TensorFlow Lite inference...')
+ interpreter = Interpreter(model_path=w) # load TFLite model
+ interpreter.allocate_tensors() # allocate
+ input_details = interpreter.get_input_details() # inputs
+ output_details = interpreter.get_output_details() # outputs
+ elif tfjs:
+ raise NotImplementedError('ERROR: YOLOv5 TF.js inference is not supported')
+ else:
+ raise NotImplementedError(f'ERROR: {w} is not a supported format')
+
+ # class names
+ if 'names' not in locals():
+ names = yaml_load(data)['names'] if data else {i: f'class{i}' for i in range(999)}
+ if names[0] == 'n01440764' and len(names) == 1000: # ImageNet
+ names = yaml_load(ROOT / 'data/ImageNet.yaml')['names'] # human-readable names
+
+ self.__dict__.update(locals()) # assign all variables to self
+
+ def forward(self, im, augment=False, visualize=False, val=False):
+ # YOLOv5 MultiBackend inference
+ b, ch, h, w = im.shape # batch, channel, height, width
+ if self.fp16 and im.dtype != torch.float16:
+ im = im.half() # to FP16
+
+ if self.pt: # PyTorch
+ y = self.model(im, augment=augment, visualize=visualize) if augment or visualize else self.model(im)
+ if isinstance(y, tuple) and not self.segmentation_model:
+ y = y[0]
+ elif self.jit: # TorchScript
+ y = self.model(im)[0]
+ elif self.dnn: # ONNX OpenCV DNN
+ im = im.cpu().numpy() # torch to numpy
+ self.net.setInput(im)
+ y = self.net.forward()
+ elif self.onnx: # ONNX Runtime
+ im = im.cpu().numpy() # torch to numpy
+ y = self.session.run([self.session.get_outputs()[0].name], {self.session.get_inputs()[0].name: im})[0]
+ elif self.xml: # OpenVINO
+ im = im.cpu().numpy() # FP32
+ y = self.executable_network([im])[self.output_layer]
+ elif self.engine: # TensorRT
+ if self.dynamic and im.shape != self.bindings['images'].shape:
+ i_in, i_out = (self.model.get_binding_index(x) for x in ('images', 'output'))
+ self.context.set_binding_shape(i_in, im.shape) # reshape if dynamic
+ self.bindings['images'] = self.bindings['images']._replace(shape=im.shape)
+ self.bindings['output'].data.resize_(tuple(self.context.get_binding_shape(i_out)))
+ s = self.bindings['images'].shape
+ assert im.shape == s, f"input size {im.shape} {'>' if self.dynamic else 'not equal to'} max model size {s}"
+ self.binding_addrs['images'] = int(im.data_ptr())
+ self.context.execute_v2(list(self.binding_addrs.values()))
+ y = self.bindings['output'].data
+ elif self.coreml: # CoreML
+ im = im.permute(0, 2, 3, 1).cpu().numpy() # torch BCHW to numpy BHWC shape(1,320,192,3)
+ im = Image.fromarray((im[0] * 255).astype('uint8'))
+ # im = im.resize((192, 320), Image.ANTIALIAS)
+ y = self.model.predict({'image': im}) # coordinates are xywh normalized
+ if 'confidence' in y:
+ box = xywh2xyxy(y['coordinates'] * [[w, h, w, h]]) # xyxy pixels
+ conf, cls = y['confidence'].max(1), y['confidence'].argmax(1).astype(np.float)
+ y = np.concatenate((box, conf.reshape(-1, 1), cls.reshape(-1, 1)), 1)
+ else:
+ k = 'var_' + str(sorted(int(k.replace('var_', '')) for k in y)[-1]) # output key
+ y = y[k] # output
+ else: # TensorFlow (SavedModel, GraphDef, Lite, Edge TPU)
+ im = im.permute(0, 2, 3, 1).cpu().numpy() # torch BCHW to numpy BHWC shape(1,320,192,3)
+ if self.saved_model: # SavedModel
+ y = (self.model(im, training=False) if self.keras else self.model(im)).numpy()
+ elif self.pb: # GraphDef
+ y = self.frozen_func(x=self.tf.constant(im)).numpy()
+ else: # Lite or Edge TPU
+ input, output = self.input_details[0], self.output_details[0]
+ int8 = input['dtype'] == np.uint8 # is TFLite quantized uint8 model
+ if int8:
+ scale, zero_point = input['quantization']
+ im = (im / scale + zero_point).astype(np.uint8) # de-scale
+ self.interpreter.set_tensor(input['index'], im)
+ self.interpreter.invoke()
+ y = self.interpreter.get_tensor(output['index'])
+ if int8:
+ scale, zero_point = output['quantization']
+ y = (y.astype(np.float32) - zero_point) * scale # re-scale
+ y[..., :4] *= [w, h, w, h] # xywh normalized to pixels
+
+ if isinstance(y, np.ndarray):
+ y = torch.tensor(y, device=self.device)
+ return (y, []) if val else y
+
+ def warmup(self, imgsz=(1, 3, 640, 640)):
+ # Warmup model by running inference once
+ warmup_types = self.pt, self.jit, self.onnx, self.engine, self.saved_model, self.pb
+ if any(warmup_types) and self.device.type != 'cpu':
+ im = torch.empty(*imgsz, dtype=torch.half if self.fp16 else torch.float, device=self.device) # input
+ for _ in range(2 if self.jit else 1): #
+ self.forward(im) # warmup
+
+ @staticmethod
+ def _model_type(p='path/to/model.pt'):
+ # Return model type from model path, i.e. path='path/to/model.onnx' -> type=onnx
+ from export import export_formats
+ suffixes = list(export_formats().Suffix) + ['.xml'] # export suffixes
+ check_suffix(p, suffixes) # checks
+ p = Path(p).name # eliminate trailing separators
+ pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs, xml2 = (s in p for s in suffixes)
+ xml |= xml2 # *_openvino_model or *.xml
+ tflite &= not edgetpu # *.tflite
+ return pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs
+
+ @staticmethod
+ def _load_metadata(f='path/to/meta.yaml'):
+ # Load metadata from meta.yaml if it exists
+ d = yaml_load(f)
+ return d['stride'], d['names'] # assign stride, names
+
+
+class AutoShape(nn.Module):
+ # YOLOv5 input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS
+ conf = 0.25 # NMS confidence threshold
+ iou = 0.45 # NMS IoU threshold
+ agnostic = False # NMS class-agnostic
+ multi_label = False # NMS multiple labels per box
+ classes = None # (optional list) filter by class, i.e. = [0, 15, 16] for COCO persons, cats and dogs
+ max_det = 1000 # maximum number of detections per image
+ amp = False # Automatic Mixed Precision (AMP) inference
+
+ def __init__(self, model, verbose=True):
+ super().__init__()
+ if verbose:
+ LOGGER.info('Adding AutoShape... ')
+ copy_attr(self, model, include=('yaml', 'nc', 'hyp', 'names', 'stride', 'abc'), exclude=()) # copy attributes
+ self.dmb = isinstance(model, DetectMultiBackend) # DetectMultiBackend() instance
+ self.pt = not self.dmb or model.pt # PyTorch model
+ self.model = model.eval()
+ if self.pt:
+ m = self.model.model.model[-1] if self.dmb else self.model.model[-1] # Detect()
+ m.inplace = False # Detect.inplace=False for safe multithread inference
+
+ def _apply(self, fn):
+ # Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers
+ self = super()._apply(fn)
+ if self.pt:
+ m = self.model.model.model[-1] if self.dmb else self.model.model[-1] # Detect()
+ m.stride = fn(m.stride)
+ m.grid = list(map(fn, m.grid))
+ if isinstance(m.anchor_grid, list):
+ m.anchor_grid = list(map(fn, m.anchor_grid))
+ return self
+
+ @smart_inference_mode()
+ def forward(self, ims, size=640, augment=False, profile=False):
+ # Inference from various sources. For size(height=640, width=1280), RGB images example inputs are:
+ # file: ims = 'data/images/zidane.jpg' # str or PosixPath
+ # URI: = 'https://ultralytics.com/images/zidane.jpg'
+ # OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3)
+ # PIL: = Image.open('image.jpg') or ImageGrab.grab() # HWC x(640,1280,3)
+ # numpy: = np.zeros((640,1280,3)) # HWC
+ # torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values)
+ # multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images
+
+ dt = (Profile(), Profile(), Profile())
+ with dt[0]:
+ if isinstance(size, int): # expand
+ size = (size, size)
+ p = next(self.model.parameters()) if self.pt else torch.empty(1, device=self.model.device) # param
+ autocast = self.amp and (p.device.type != 'cpu') # Automatic Mixed Precision (AMP) inference
+ if isinstance(ims, torch.Tensor): # torch
+ with amp.autocast(autocast):
+ return self.model(ims.to(p.device).type_as(p), augment, profile) # inference
+
+ # Pre-process
+ n, ims = (len(ims), list(ims)) if isinstance(ims, (list, tuple)) else (1, [ims]) # number, list of images
+ shape0, shape1, files = [], [], [] # image and inference shapes, filenames
+ for i, im in enumerate(ims):
+ f = f'image{i}' # filename
+ if isinstance(im, (str, Path)): # filename or uri
+ im, f = Image.open(requests.get(im, stream=True).raw if str(im).startswith('http') else im), im
+ im = np.asarray(exif_transpose(im))
+ elif isinstance(im, Image.Image): # PIL Image
+ im, f = np.asarray(exif_transpose(im)), getattr(im, 'filename', f) or f
+ files.append(Path(f).with_suffix('.jpg').name)
+ if im.shape[0] < 5: # image in CHW
+ im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1)
+ im = im[..., :3] if im.ndim == 3 else cv2.cvtColor(im, cv2.COLOR_GRAY2BGR) # enforce 3ch input
+ s = im.shape[:2] # HWC
+ shape0.append(s) # image shape
+ g = max(size) / max(s) # gain
+ shape1.append([y * g for y in s])
+ ims[i] = im if im.data.contiguous else np.ascontiguousarray(im) # update
+ shape1 = [make_divisible(x, self.stride) for x in np.array(shape1).max(0)] if self.pt else size # inf shape
+ x = [letterbox(im, shape1, auto=False)[0] for im in ims] # pad
+ x = np.ascontiguousarray(np.array(x).transpose((0, 3, 1, 2))) # stack and BHWC to BCHW
+ x = torch.from_numpy(x).to(p.device).type_as(p) / 255 # uint8 to fp16/32
+
+ with amp.autocast(autocast):
+ # Inference
+ with dt[1]:
+ y = self.model(x, augment, profile) # forward
+
+ # Post-process
+ with dt[2]:
+ y = non_max_suppression(y if self.dmb else y[0],
+ self.conf,
+ self.iou,
+ self.classes,
+ self.agnostic,
+ self.multi_label,
+ max_det=self.max_det) # NMS
+ for i in range(n):
+ scale_coords(shape1, y[i][:, :4], shape0[i])
+
+ return Detections(ims, y, files, dt, self.names, x.shape)
+
+
+class Detections:
+ # YOLOv5 detections class for inference results
+ def __init__(self, ims, pred, files, times=(0, 0, 0), names=None, shape=None):
+ super().__init__()
+ d = pred[0].device # device
+ gn = [torch.tensor([*(im.shape[i] for i in [1, 0, 1, 0]), 1, 1], device=d) for im in ims] # normalizations
+ self.ims = ims # list of images as numpy arrays
+ self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls)
+ self.names = names # class names
+ self.files = files # image filenames
+ self.times = times # profiling times
+ self.xyxy = pred # xyxy pixels
+ self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels
+ self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized
+ self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized
+ self.n = len(self.pred) # number of images (batch size)
+ self.t = tuple(x.t / self.n * 1E3 for x in times) # timestamps (ms)
+ self.s = shape # inference BCHW shape
+
+ def display(self, pprint=False, show=False, save=False, crop=False, render=False, labels=True, save_dir=Path('')):
+ crops = []
+ for i, (im, pred) in enumerate(zip(self.ims, self.pred)):
+ s = f'image {i + 1}/{len(self.pred)}: {im.shape[0]}x{im.shape[1]} ' # string
+ if pred.shape[0]:
+ for c in pred[:, -1].unique():
+ n = (pred[:, -1] == c).sum() # detections per class
+ s += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string
+ if show or save or render or crop:
+ annotator = Annotator(im, example=str(self.names))
+ for *box, conf, cls in reversed(pred): # xyxy, confidence, class
+ label = f'{self.names[int(cls)]} {conf:.2f}'
+ if crop:
+ file = save_dir / 'crops' / self.names[int(cls)] / self.files[i] if save else None
+ crops.append({
+ 'box': box,
+ 'conf': conf,
+ 'cls': cls,
+ 'label': label,
+ 'im': save_one_box(box, im, file=file, save=save)})
+ else: # all others
+ annotator.box_label(box, label if labels else '', color=colors(cls))
+ im = annotator.im
+ else:
+ s += '(no detections)'
+
+ im = Image.fromarray(im.astype(np.uint8)) if isinstance(im, np.ndarray) else im # from np
+ if pprint:
+ print(s.rstrip(', '))
+ if show:
+ im.show(self.files[i]) # show
+ if save:
+ f = self.files[i]
+ im.save(save_dir / f) # save
+ if i == self.n - 1:
+ LOGGER.info(f"Saved {self.n} image{'s' * (self.n > 1)} to {colorstr('bold', save_dir)}")
+ if render:
+ self.ims[i] = np.asarray(im)
+ if crop:
+ if save:
+ LOGGER.info(f'Saved results to {save_dir}\n')
+ return crops
+
+ def print(self):
+ self.display(pprint=True) # print results
+ print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {tuple(self.s)}' % self.t)
+
+ def show(self, labels=True):
+ self.display(show=True, labels=labels) # show results
+
+ def save(self, labels=True, save_dir='runs/detect/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) # increment save_dir
+ self.display(save=True, labels=labels, save_dir=save_dir) # save results
+
+ def crop(self, save=True, save_dir='runs/detect/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) if save else None
+ return self.display(crop=True, save=save, save_dir=save_dir) # crop results
+
+ def render(self, labels=True):
+ self.display(render=True, labels=labels) # render results
+ return self.ims
+
+ def pandas(self):
+ # return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0])
+ new = copy(self) # return copy
+ ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns
+ cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns
+ for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]):
+ a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update
+ setattr(new, k, [pd.DataFrame(x, columns=c) for x in a])
+ return new
+
+ def tolist(self):
+ # return a list of Detections objects, i.e. 'for result in results.tolist():'
+ r = range(self.n) # iterable
+ x = [Detections([self.ims[i]], [self.pred[i]], [self.files[i]], self.times, self.names, self.s) for i in r]
+ # for d in x:
+ # for k in ['ims', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']:
+ # setattr(d, k, getattr(d, k)[0]) # pop out of list
+ return x
+
+ def __len__(self):
+ return self.n # override len(results)
+
+ def __str__(self):
+ self.print() # override print(results)
+ return ''
+
+
+class Proto(nn.Module):
+ # YOLOv5 mask Proto module for segmentation models
+ def __init__(self, c1, c_=256, c2=32): # ch_in, number of protos, number of masks
+ super().__init__()
+ self.cv1 = Conv(c1, c_, k=3)
+ self.upsample = nn.Upsample(scale_factor=2, mode='nearest')
+ self.cv2 = Conv(c_, c_, k=3)
+ self.cv3 = Conv(c_, c2)
+
+ def forward(self, x):
+ return self.cv3(self.cv2(self.upsample(self.cv1(x))))
+
+
+class Refine(nn.Module):
+
+ def __init__(self, ch, c_=256, c2=32, k=3): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.refine = nn.ModuleList()
+ for c in ch:
+ self.refine.append(Conv(c, c_, k))
+ self.upsample = nn.Upsample(scale_factor=2, mode='nearest')
+ self.cv2 = Conv(c_, c_, k)
+ self.cv3 = Conv(c_, c2)
+
+ def forward(self, x):
+ for i, f in enumerate(x):
+ if i == 0:
+ r = self.refine[i](f)
+ else:
+ r_p = self.refine[i](f)
+ r_p = F.interpolate(r_p, r.size()[2:], mode="nearest")
+ r = r + r_p
+ return self.cv3(self.cv2(self.upsample(r)))
+
+
+class Classify(nn.Module):
+ # YOLOv5 classification head, i.e. x(b,c1,20,20) to x(b,c2)
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ c_ = 1280 # efficientnet_b0 size
+ self.conv = Conv(c1, c_, k, s, autopad(k, p), g)
+ self.pool = nn.AdaptiveAvgPool2d(1) # to x(b,c_,1,1)
+ self.drop = nn.Dropout(p=0.0, inplace=True)
+ self.linear = nn.Linear(c_, c2) # to x(b,c2)
+
+ def forward(self, x):
+ if isinstance(x, list):
+ x = torch.cat(x, 1)
+ return self.linear(self.drop(self.pool(self.conv(x)).flatten(1)))
diff --git a/ipex/seg/models/experimental.py b/ipex/seg/models/experimental.py
new file mode 100644
index 000000000..02d35b9eb
--- /dev/null
+++ b/ipex/seg/models/experimental.py
@@ -0,0 +1,111 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Experimental modules
+"""
+import math
+
+import numpy as np
+import torch
+import torch.nn as nn
+
+from utils.downloads import attempt_download
+
+
+class Sum(nn.Module):
+ # Weighted sum of 2 or more layers https://arxiv.org/abs/1911.09070
+ def __init__(self, n, weight=False): # n: number of inputs
+ super().__init__()
+ self.weight = weight # apply weights boolean
+ self.iter = range(n - 1) # iter object
+ if weight:
+ self.w = nn.Parameter(-torch.arange(1.0, n) / 2, requires_grad=True) # layer weights
+
+ def forward(self, x):
+ y = x[0] # no weight
+ if self.weight:
+ w = torch.sigmoid(self.w) * 2
+ for i in self.iter:
+ y = y + x[i + 1] * w[i]
+ else:
+ for i in self.iter:
+ y = y + x[i + 1]
+ return y
+
+
+class MixConv2d(nn.Module):
+ # Mixed Depth-wise Conv https://arxiv.org/abs/1907.09595
+ def __init__(self, c1, c2, k=(1, 3), s=1, equal_ch=True): # ch_in, ch_out, kernel, stride, ch_strategy
+ super().__init__()
+ n = len(k) # number of convolutions
+ if equal_ch: # equal c_ per group
+ i = torch.linspace(0, n - 1E-6, c2).floor() # c2 indices
+ c_ = [(i == g).sum() for g in range(n)] # intermediate channels
+ else: # equal weight.numel() per group
+ b = [c2] + [0] * n
+ a = np.eye(n + 1, n, k=-1)
+ a -= np.roll(a, 1, axis=1)
+ a *= np.array(k) ** 2
+ a[0] = 1
+ c_ = np.linalg.lstsq(a, b, rcond=None)[0].round() # solve for equal weight indices, ax = b
+
+ self.m = nn.ModuleList([
+ nn.Conv2d(c1, int(c_), k, s, k // 2, groups=math.gcd(c1, int(c_)), bias=False) for k, c_ in zip(k, c_)])
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU()
+
+ def forward(self, x):
+ return self.act(self.bn(torch.cat([m(x) for m in self.m], 1)))
+
+
+class Ensemble(nn.ModuleList):
+ # Ensemble of models
+ def __init__(self):
+ super().__init__()
+
+ def forward(self, x, augment=False, profile=False, visualize=False):
+ y = [module(x, augment, profile, visualize)[0] for module in self]
+ # y = torch.stack(y).max(0)[0] # max ensemble
+ # y = torch.stack(y).mean(0) # mean ensemble
+ y = torch.cat(y, 1) # nms ensemble
+ return y, None # inference, train output
+
+
+def attempt_load(weights, device=None, inplace=True, fuse=True):
+ # Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a
+ from models.yolo import Detect, Model
+
+ model = Ensemble()
+ for w in weights if isinstance(weights, list) else [weights]:
+ ckpt = torch.load(attempt_download(w), map_location='cpu') # load
+ ckpt = (ckpt.get('ema') or ckpt['model']).to(device).float() # FP32 model
+
+ # Model compatibility updates
+ if not hasattr(ckpt, 'stride'):
+ ckpt.stride = torch.tensor([32.])
+ if hasattr(ckpt, 'names') and isinstance(ckpt.names, (list, tuple)):
+ ckpt.names = dict(enumerate(ckpt.names)) # convert to dict
+
+ model.append(ckpt.fuse().eval() if fuse and hasattr(ckpt, 'fuse') else ckpt.eval()) # model in eval mode
+
+ # Module compatibility updates
+ for m in model.modules():
+ t = type(m)
+ if t in (nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU, Detect, Model):
+ m.inplace = inplace # torch 1.7.0 compatibility
+ if t is Detect and not isinstance(m.anchor_grid, list):
+ delattr(m, 'anchor_grid')
+ setattr(m, 'anchor_grid', [torch.zeros(1)] * m.nl)
+ elif t is nn.Upsample and not hasattr(m, 'recompute_scale_factor'):
+ m.recompute_scale_factor = None # torch 1.11.0 compatibility
+
+ # Return model
+ if len(model) == 1:
+ return model[-1]
+
+ # Return detection ensemble
+ print(f'Ensemble created with {weights}\n')
+ for k in 'names', 'nc', 'yaml':
+ setattr(model, k, getattr(model[0], k))
+ model.stride = model[torch.argmax(torch.tensor([m.stride.max() for m in model])).int()].stride # max stride
+ assert all(model[0].nc == m.nc for m in model), f'Models have different class counts: {[m.nc for m in model]}'
+ return model
diff --git a/ipex/seg/models/hub/yolov3-spp.yaml b/ipex/seg/models/hub/yolov3-spp.yaml
new file mode 100644
index 000000000..c66982158
--- /dev/null
+++ b/ipex/seg/models/hub/yolov3-spp.yaml
@@ -0,0 +1,51 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,13, 16,30, 33,23] # P3/8
+ - [30,61, 62,45, 59,119] # P4/16
+ - [116,90, 156,198, 373,326] # P5/32
+
+# darknet53 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Bottleneck, [64]],
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 2, Bottleneck, [128]],
+ [-1, 1, Conv, [256, 3, 2]], # 5-P3/8
+ [-1, 8, Bottleneck, [256]],
+ [-1, 1, Conv, [512, 3, 2]], # 7-P4/16
+ [-1, 8, Bottleneck, [512]],
+ [-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
+ [-1, 4, Bottleneck, [1024]], # 10
+ ]
+
+# YOLOv3-SPP head
+head:
+ [[-1, 1, Bottleneck, [1024, False]],
+ [-1, 1, SPP, [512, [5, 9, 13]]],
+ [-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 6], 1, Concat, [1]], # cat backbone P3
+ [-1, 1, Bottleneck, [256, False]],
+ [-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)
+
+ [[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
+ ]
diff --git a/ipex/seg/models/hub/yolov3-tiny.yaml b/ipex/seg/models/hub/yolov3-tiny.yaml
new file mode 100644
index 000000000..b28b44315
--- /dev/null
+++ b/ipex/seg/models/hub/yolov3-tiny.yaml
@@ -0,0 +1,41 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,14, 23,27, 37,58] # P4/16
+ - [81,82, 135,169, 344,319] # P5/32
+
+# YOLOv3-tiny backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [16, 3, 1]], # 0
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 1-P1/2
+ [-1, 1, Conv, [32, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 3-P2/4
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 5-P3/8
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 7-P4/16
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 9-P5/32
+ [-1, 1, Conv, [512, 3, 1]],
+ [-1, 1, nn.ZeroPad2d, [[0, 1, 0, 1]]], # 11
+ [-1, 1, nn.MaxPool2d, [2, 1, 0]], # 12
+ ]
+
+# YOLOv3-tiny head
+head:
+ [[-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Conv, [256, 3, 1]], # 19 (P4/16-medium)
+
+ [[19, 15], 1, Detect, [nc, anchors]], # Detect(P4, P5)
+ ]
diff --git a/ipex/seg/models/hub/yolov3.yaml b/ipex/seg/models/hub/yolov3.yaml
new file mode 100644
index 000000000..d1ef91290
--- /dev/null
+++ b/ipex/seg/models/hub/yolov3.yaml
@@ -0,0 +1,51 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,13, 16,30, 33,23] # P3/8
+ - [30,61, 62,45, 59,119] # P4/16
+ - [116,90, 156,198, 373,326] # P5/32
+
+# darknet53 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Bottleneck, [64]],
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 2, Bottleneck, [128]],
+ [-1, 1, Conv, [256, 3, 2]], # 5-P3/8
+ [-1, 8, Bottleneck, [256]],
+ [-1, 1, Conv, [512, 3, 2]], # 7-P4/16
+ [-1, 8, Bottleneck, [512]],
+ [-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
+ [-1, 4, Bottleneck, [1024]], # 10
+ ]
+
+# YOLOv3 head
+head:
+ [[-1, 1, Bottleneck, [1024, False]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 6], 1, Concat, [1]], # cat backbone P3
+ [-1, 1, Bottleneck, [256, False]],
+ [-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)
+
+ [[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
+ ]
diff --git a/ipex/seg/models/segment/yolov7-seg.yaml b/ipex/seg/models/segment/yolov7-seg.yaml
new file mode 100644
index 000000000..ed5159e81
--- /dev/null
+++ b/ipex/seg/models/segment/yolov7-seg.yaml
@@ -0,0 +1,140 @@
+# YOLOv7
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [12,16, 19,36, 40,28] # P3/8
+ - [36,75, 76,55, 72,146] # P4/16
+ - [142,110, 192,243, 459,401] # P5/32
+
+# YOLOv7 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Conv, [64, 3, 1]],
+
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 1, Conv, [64, 1, 1]],
+ [-2, 1, Conv, [64, 1, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 11
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [128, 1, 1]],
+ [-3, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 16-P3/8
+ [-1, 1, Conv, [128, 1, 1]],
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [512, 1, 1]], # 24
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-3, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 29-P4/16
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [1024, 1, 1]], # 37
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-3, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [512, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 42-P5/32
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [1024, 1, 1]], # 50
+ ]
+
+# yolov7 head
+head:
+ [[-1, 1, SPPCSPC, [512]], # 51
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [37, 1, Conv, [256, 1, 1]], # route backbone P4
+ [[-1, -2], 1, Concat, [1]],
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 63
+
+ [-1, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [24, 1, Conv, [128, 1, 1]], # route backbone P3
+ [[-1, -2], 1, Concat, [1]],
+
+ [-1, 1, Conv, [128, 1, 1]],
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [128, 1, 1]], # 75
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [128, 1, 1]],
+ [-3, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 2]],
+ [[-1, -3, 63], 1, Concat, [1]],
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 88
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-3, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 2]],
+ [[-1, -3, 51], 1, Concat, [1]],
+
+ [-1, 1, Conv, [512, 1, 1]],
+ [-2, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [512, 1, 1]], # 101
+
+ [75, 1, Conv, [256, 3, 1]],
+ [88, 1, Conv, [512, 3, 1]],
+ [101, 1, Conv, [1024, 3, 1]],
+
+ [[102, 103, 104], 1, ISegment, [nc, anchors, 32, 256]], # Detect(P3, P4, P5)
+ ]
diff --git a/ipex/seg/models/tf.py b/ipex/seg/models/tf.py
new file mode 100644
index 000000000..ecb0d4d79
--- /dev/null
+++ b/ipex/seg/models/tf.py
@@ -0,0 +1,574 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+TensorFlow, Keras and TFLite versions of YOLOv5
+Authored by https://github.com/zldrobit in PR https://github.com/ultralytics/yolov5/pull/1127
+
+Usage:
+ $ python models/tf.py --weights yolov5s.pt
+
+Export:
+ $ python export.py --weights yolov5s.pt --include saved_model pb tflite tfjs
+"""
+
+import argparse
+import sys
+from copy import deepcopy
+from pathlib import Path
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+# ROOT = ROOT.relative_to(Path.cwd()) # relative
+
+import numpy as np
+import tensorflow as tf
+import torch
+import torch.nn as nn
+from tensorflow import keras
+
+from models.common import (C3, SPP, SPPF, Bottleneck, BottleneckCSP, C3x, Concat, Conv, CrossConv, DWConv,
+ DWConvTranspose2d, Focus, autopad)
+from models.experimental import MixConv2d, attempt_load
+from models.yolo import Detect
+from utils.activations import SiLU
+from utils.general import LOGGER, make_divisible, print_args
+
+
+class TFBN(keras.layers.Layer):
+ # TensorFlow BatchNormalization wrapper
+ def __init__(self, w=None):
+ super().__init__()
+ self.bn = keras.layers.BatchNormalization(
+ beta_initializer=keras.initializers.Constant(w.bias.numpy()),
+ gamma_initializer=keras.initializers.Constant(w.weight.numpy()),
+ moving_mean_initializer=keras.initializers.Constant(w.running_mean.numpy()),
+ moving_variance_initializer=keras.initializers.Constant(w.running_var.numpy()),
+ epsilon=w.eps)
+
+ def call(self, inputs):
+ return self.bn(inputs)
+
+
+class TFPad(keras.layers.Layer):
+ # Pad inputs in spatial dimensions 1 and 2
+ def __init__(self, pad):
+ super().__init__()
+ if isinstance(pad, int):
+ self.pad = tf.constant([[0, 0], [pad, pad], [pad, pad], [0, 0]])
+ else: # tuple/list
+ self.pad = tf.constant([[0, 0], [pad[0], pad[0]], [pad[1], pad[1]], [0, 0]])
+
+ def call(self, inputs):
+ return tf.pad(inputs, self.pad, mode='constant', constant_values=0)
+
+
+class TFConv(keras.layers.Layer):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert g == 1, "TF v2.2 Conv2D does not support 'groups' argument"
+ # TensorFlow convolution padding is inconsistent with PyTorch (e.g. k=3 s=2 'SAME' padding)
+ # see https://stackoverflow.com/questions/52975843/comparing-conv2d-with-padding-between-tensorflow-and-pytorch
+ conv = keras.layers.Conv2D(
+ filters=c2,
+ kernel_size=k,
+ strides=s,
+ padding='SAME' if s == 1 else 'VALID',
+ use_bias=not hasattr(w, 'bn'),
+ kernel_initializer=keras.initializers.Constant(w.conv.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer='zeros' if hasattr(w, 'bn') else keras.initializers.Constant(w.conv.bias.numpy()))
+ self.conv = conv if s == 1 else keras.Sequential([TFPad(autopad(k, p)), conv])
+ self.bn = TFBN(w.bn) if hasattr(w, 'bn') else tf.identity
+ self.act = activations(w.act) if act else tf.identity
+
+ def call(self, inputs):
+ return self.act(self.bn(self.conv(inputs)))
+
+
+class TFDWConv(keras.layers.Layer):
+ # Depthwise convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, act=True, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert c2 % c1 == 0, f'TFDWConv() output={c2} must be a multiple of input={c1} channels'
+ conv = keras.layers.DepthwiseConv2D(
+ kernel_size=k,
+ depth_multiplier=c2 // c1,
+ strides=s,
+ padding='SAME' if s == 1 else 'VALID',
+ use_bias=not hasattr(w, 'bn'),
+ depthwise_initializer=keras.initializers.Constant(w.conv.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer='zeros' if hasattr(w, 'bn') else keras.initializers.Constant(w.conv.bias.numpy()))
+ self.conv = conv if s == 1 else keras.Sequential([TFPad(autopad(k, p)), conv])
+ self.bn = TFBN(w.bn) if hasattr(w, 'bn') else tf.identity
+ self.act = activations(w.act) if act else tf.identity
+
+ def call(self, inputs):
+ return self.act(self.bn(self.conv(inputs)))
+
+
+class TFDWConvTranspose2d(keras.layers.Layer):
+ # Depthwise ConvTranspose2d
+ def __init__(self, c1, c2, k=1, s=1, p1=0, p2=0, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert c1 == c2, f'TFDWConv() output={c2} must be equal to input={c1} channels'
+ assert k == 4 and p1 == 1, 'TFDWConv() only valid for k=4 and p1=1'
+ weight, bias = w.weight.permute(2, 3, 1, 0).numpy(), w.bias.numpy()
+ self.c1 = c1
+ self.conv = [
+ keras.layers.Conv2DTranspose(filters=1,
+ kernel_size=k,
+ strides=s,
+ padding='VALID',
+ output_padding=p2,
+ use_bias=True,
+ kernel_initializer=keras.initializers.Constant(weight[..., i:i + 1]),
+ bias_initializer=keras.initializers.Constant(bias[i])) for i in range(c1)]
+
+ def call(self, inputs):
+ return tf.concat([m(x) for m, x in zip(self.conv, tf.split(inputs, self.c1, 3))], 3)[:, 1:-1, 1:-1]
+
+
+class TFFocus(keras.layers.Layer):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True, w=None):
+ # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = TFConv(c1 * 4, c2, k, s, p, g, act, w.conv)
+
+ def call(self, inputs): # x(b,w,h,c) -> y(b,w/2,h/2,4c)
+ # inputs = inputs / 255 # normalize 0-255 to 0-1
+ inputs = [inputs[:, ::2, ::2, :], inputs[:, 1::2, ::2, :], inputs[:, ::2, 1::2, :], inputs[:, 1::2, 1::2, :]]
+ return self.conv(tf.concat(inputs, 3))
+
+
+class TFBottleneck(keras.layers.Layer):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5, w=None): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_, c2, 3, 1, g=g, w=w.cv2)
+ self.add = shortcut and c1 == c2
+
+ def call(self, inputs):
+ return inputs + self.cv2(self.cv1(inputs)) if self.add else self.cv2(self.cv1(inputs))
+
+
+class TFCrossConv(keras.layers.Layer):
+ # Cross Convolution
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False, w=None):
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, (1, k), (1, s), w=w.cv1)
+ self.cv2 = TFConv(c_, c2, (k, 1), (s, 1), g=g, w=w.cv2)
+ self.add = shortcut and c1 == c2
+
+ def call(self, inputs):
+ return inputs + self.cv2(self.cv1(inputs)) if self.add else self.cv2(self.cv1(inputs))
+
+
+class TFConv2d(keras.layers.Layer):
+ # Substitution for PyTorch nn.Conv2D
+ def __init__(self, c1, c2, k, s=1, g=1, bias=True, w=None):
+ super().__init__()
+ assert g == 1, "TF v2.2 Conv2D does not support 'groups' argument"
+ self.conv = keras.layers.Conv2D(filters=c2,
+ kernel_size=k,
+ strides=s,
+ padding='VALID',
+ use_bias=bias,
+ kernel_initializer=keras.initializers.Constant(
+ w.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer=keras.initializers.Constant(w.bias.numpy()) if bias else None)
+
+ def call(self, inputs):
+ return self.conv(inputs)
+
+
+class TFBottleneckCSP(keras.layers.Layer):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv2d(c1, c_, 1, 1, bias=False, w=w.cv2)
+ self.cv3 = TFConv2d(c_, c_, 1, 1, bias=False, w=w.cv3)
+ self.cv4 = TFConv(2 * c_, c2, 1, 1, w=w.cv4)
+ self.bn = TFBN(w.bn)
+ self.act = lambda x: keras.activations.swish(x)
+ self.m = keras.Sequential([TFBottleneck(c_, c_, shortcut, g, e=1.0, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ y1 = self.cv3(self.m(self.cv1(inputs)))
+ y2 = self.cv2(inputs)
+ return self.cv4(self.act(self.bn(tf.concat((y1, y2), axis=3))))
+
+
+class TFC3(keras.layers.Layer):
+ # CSP Bottleneck with 3 convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c1, c_, 1, 1, w=w.cv2)
+ self.cv3 = TFConv(2 * c_, c2, 1, 1, w=w.cv3)
+ self.m = keras.Sequential([TFBottleneck(c_, c_, shortcut, g, e=1.0, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ return self.cv3(tf.concat((self.m(self.cv1(inputs)), self.cv2(inputs)), axis=3))
+
+
+class TFC3x(keras.layers.Layer):
+ # 3 module with cross-convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c1, c_, 1, 1, w=w.cv2)
+ self.cv3 = TFConv(2 * c_, c2, 1, 1, w=w.cv3)
+ self.m = keras.Sequential([
+ TFCrossConv(c_, c_, k=3, s=1, g=g, e=1.0, shortcut=shortcut, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ return self.cv3(tf.concat((self.m(self.cv1(inputs)), self.cv2(inputs)), axis=3))
+
+
+class TFSPP(keras.layers.Layer):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, k=(5, 9, 13), w=None):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_ * (len(k) + 1), c2, 1, 1, w=w.cv2)
+ self.m = [keras.layers.MaxPool2D(pool_size=x, strides=1, padding='SAME') for x in k]
+
+ def call(self, inputs):
+ x = self.cv1(inputs)
+ return self.cv2(tf.concat([x] + [m(x) for m in self.m], 3))
+
+
+class TFSPPF(keras.layers.Layer):
+ # Spatial pyramid pooling-Fast layer
+ def __init__(self, c1, c2, k=5, w=None):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_ * 4, c2, 1, 1, w=w.cv2)
+ self.m = keras.layers.MaxPool2D(pool_size=k, strides=1, padding='SAME')
+
+ def call(self, inputs):
+ x = self.cv1(inputs)
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(tf.concat([x, y1, y2, self.m(y2)], 3))
+
+
+class TFDetect(keras.layers.Layer):
+ # TF YOLOv5 Detect layer
+ def __init__(self, nc=80, anchors=(), ch=(), imgsz=(640, 640), w=None): # detection layer
+ super().__init__()
+ self.stride = tf.convert_to_tensor(w.stride.numpy(), dtype=tf.float32)
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [tf.zeros(1)] * self.nl # init grid
+ self.anchors = tf.convert_to_tensor(w.anchors.numpy(), dtype=tf.float32)
+ self.anchor_grid = tf.reshape(self.anchors * tf.reshape(self.stride, [self.nl, 1, 1]), [self.nl, 1, -1, 1, 2])
+ self.m = [TFConv2d(x, self.no * self.na, 1, w=w.m[i]) for i, x in enumerate(ch)]
+ self.training = False # set to False after building model
+ self.imgsz = imgsz
+ for i in range(self.nl):
+ ny, nx = self.imgsz[0] // self.stride[i], self.imgsz[1] // self.stride[i]
+ self.grid[i] = self._make_grid(nx, ny)
+
+ def call(self, inputs):
+ z = [] # inference output
+ x = []
+ for i in range(self.nl):
+ x.append(self.m[i](inputs[i]))
+ # x(bs,20,20,255) to x(bs,3,20,20,85)
+ ny, nx = self.imgsz[0] // self.stride[i], self.imgsz[1] // self.stride[i]
+ x[i] = tf.reshape(x[i], [-1, ny * nx, self.na, self.no])
+
+ if not self.training: # inference
+ y = tf.sigmoid(x[i])
+ grid = tf.transpose(self.grid[i], [0, 2, 1, 3]) - 0.5
+ anchor_grid = tf.transpose(self.anchor_grid[i], [0, 2, 1, 3]) * 4
+ xy = (y[..., 0:2] * 2 + grid) * self.stride[i] # xy
+ wh = y[..., 2:4] ** 2 * anchor_grid
+ # Normalize xywh to 0-1 to reduce calibration error
+ xy /= tf.constant([[self.imgsz[1], self.imgsz[0]]], dtype=tf.float32)
+ wh /= tf.constant([[self.imgsz[1], self.imgsz[0]]], dtype=tf.float32)
+ y = tf.concat([xy, wh, y[..., 4:]], -1)
+ z.append(tf.reshape(y, [-1, self.na * ny * nx, self.no]))
+
+ return tf.transpose(x, [0, 2, 1, 3]) if self.training else (tf.concat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ # yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ # return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+ xv, yv = tf.meshgrid(tf.range(nx), tf.range(ny))
+ return tf.cast(tf.reshape(tf.stack([xv, yv], 2), [1, 1, ny * nx, 2]), dtype=tf.float32)
+
+
+class TFUpsample(keras.layers.Layer):
+ # TF version of torch.nn.Upsample()
+ def __init__(self, size, scale_factor, mode, w=None): # warning: all arguments needed including 'w'
+ super().__init__()
+ assert scale_factor == 2, "scale_factor must be 2"
+ self.upsample = lambda x: tf.image.resize(x, (x.shape[1] * 2, x.shape[2] * 2), method=mode)
+ # self.upsample = keras.layers.UpSampling2D(size=scale_factor, interpolation=mode)
+ # with default arguments: align_corners=False, half_pixel_centers=False
+ # self.upsample = lambda x: tf.raw_ops.ResizeNearestNeighbor(images=x,
+ # size=(x.shape[1] * 2, x.shape[2] * 2))
+
+ def call(self, inputs):
+ return self.upsample(inputs)
+
+
+class TFConcat(keras.layers.Layer):
+ # TF version of torch.concat()
+ def __init__(self, dimension=1, w=None):
+ super().__init__()
+ assert dimension == 1, "convert only NCHW to NHWC concat"
+ self.d = 3
+
+ def call(self, inputs):
+ return tf.concat(inputs, self.d)
+
+
+def parse_model(d, ch, model, imgsz): # model_dict, input_channels(3)
+ LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m_str = m
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ try:
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+ except NameError:
+ pass
+
+ n = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in [
+ nn.Conv2d, Conv, DWConv, DWConvTranspose2d, Bottleneck, SPP, SPPF, MixConv2d, Focus, CrossConv,
+ BottleneckCSP, C3, C3x]:
+ c1, c2 = ch[f], args[0]
+ c2 = make_divisible(c2 * gw, 8) if c2 != no else c2
+
+ args = [c1, c2, *args[1:]]
+ if m in [BottleneckCSP, C3, C3x]:
+ args.insert(2, n)
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum(ch[-1 if x == -1 else x + 1] for x in f)
+ elif m is Detect:
+ args.append([ch[x + 1] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ args.append(imgsz)
+ else:
+ c2 = ch[f]
+
+ tf_m = eval('TF' + m_str.replace('nn.', ''))
+ m_ = keras.Sequential([tf_m(*args, w=model.model[i][j]) for j in range(n)]) if n > 1 \
+ else tf_m(*args, w=model.model[i]) # module
+
+ torch_m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum(x.numel() for x in torch_m_.parameters()) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ LOGGER.info(f'{i:>3}{str(f):>18}{str(n):>3}{np:>10} {t:<40}{str(args):<30}') # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ ch.append(c2)
+ return keras.Sequential(layers), sorted(save)
+
+
+class TFModel:
+ # TF YOLOv5 model
+ def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None, model=None, imgsz=(640, 640)): # model, channels, classes
+ super().__init__()
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg) as f:
+ self.yaml = yaml.load(f, Loader=yaml.FullLoader) # model dict
+
+ # Define model
+ if nc and nc != self.yaml['nc']:
+ LOGGER.info(f"Overriding {cfg} nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ self.model, self.savelist = parse_model(deepcopy(self.yaml), ch=[ch], model=model, imgsz=imgsz)
+
+ def predict(self,
+ inputs,
+ tf_nms=False,
+ agnostic_nms=False,
+ topk_per_class=100,
+ topk_all=100,
+ iou_thres=0.45,
+ conf_thres=0.25):
+ y = [] # outputs
+ x = inputs
+ for m in self.model.layers:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+
+ x = m(x) # run
+ y.append(x if m.i in self.savelist else None) # save output
+
+ # Add TensorFlow NMS
+ if tf_nms:
+ boxes = self._xywh2xyxy(x[0][..., :4])
+ probs = x[0][:, :, 4:5]
+ classes = x[0][:, :, 5:]
+ scores = probs * classes
+ if agnostic_nms:
+ nms = AgnosticNMS()((boxes, classes, scores), topk_all, iou_thres, conf_thres)
+ else:
+ boxes = tf.expand_dims(boxes, 2)
+ nms = tf.image.combined_non_max_suppression(boxes,
+ scores,
+ topk_per_class,
+ topk_all,
+ iou_thres,
+ conf_thres,
+ clip_boxes=False)
+ return nms, x[1]
+ return x[0] # output only first tensor [1,6300,85] = [xywh, conf, class0, class1, ...]
+ # x = x[0][0] # [x(1,6300,85), ...] to x(6300,85)
+ # xywh = x[..., :4] # x(6300,4) boxes
+ # conf = x[..., 4:5] # x(6300,1) confidences
+ # cls = tf.reshape(tf.cast(tf.argmax(x[..., 5:], axis=1), tf.float32), (-1, 1)) # x(6300,1) classes
+ # return tf.concat([conf, cls, xywh], 1)
+
+ @staticmethod
+ def _xywh2xyxy(xywh):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ x, y, w, h = tf.split(xywh, num_or_size_splits=4, axis=-1)
+ return tf.concat([x - w / 2, y - h / 2, x + w / 2, y + h / 2], axis=-1)
+
+
+class AgnosticNMS(keras.layers.Layer):
+ # TF Agnostic NMS
+ def call(self, input, topk_all, iou_thres, conf_thres):
+ # wrap map_fn to avoid TypeSpec related error https://stackoverflow.com/a/65809989/3036450
+ return tf.map_fn(lambda x: self._nms(x, topk_all, iou_thres, conf_thres),
+ input,
+ fn_output_signature=(tf.float32, tf.float32, tf.float32, tf.int32),
+ name='agnostic_nms')
+
+ @staticmethod
+ def _nms(x, topk_all=100, iou_thres=0.45, conf_thres=0.25): # agnostic NMS
+ boxes, classes, scores = x
+ class_inds = tf.cast(tf.argmax(classes, axis=-1), tf.float32)
+ scores_inp = tf.reduce_max(scores, -1)
+ selected_inds = tf.image.non_max_suppression(boxes,
+ scores_inp,
+ max_output_size=topk_all,
+ iou_threshold=iou_thres,
+ score_threshold=conf_thres)
+ selected_boxes = tf.gather(boxes, selected_inds)
+ padded_boxes = tf.pad(selected_boxes,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]], [0, 0]],
+ mode="CONSTANT",
+ constant_values=0.0)
+ selected_scores = tf.gather(scores_inp, selected_inds)
+ padded_scores = tf.pad(selected_scores,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]]],
+ mode="CONSTANT",
+ constant_values=-1.0)
+ selected_classes = tf.gather(class_inds, selected_inds)
+ padded_classes = tf.pad(selected_classes,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]]],
+ mode="CONSTANT",
+ constant_values=-1.0)
+ valid_detections = tf.shape(selected_inds)[0]
+ return padded_boxes, padded_scores, padded_classes, valid_detections
+
+
+def activations(act=nn.SiLU):
+ # Returns TF activation from input PyTorch activation
+ if isinstance(act, nn.LeakyReLU):
+ return lambda x: keras.activations.relu(x, alpha=0.1)
+ elif isinstance(act, nn.Hardswish):
+ return lambda x: x * tf.nn.relu6(x + 3) * 0.166666667
+ elif isinstance(act, (nn.SiLU, SiLU)):
+ return lambda x: keras.activations.swish(x)
+ else:
+ raise Exception(f'no matching TensorFlow activation found for PyTorch activation {act}')
+
+
+def representative_dataset_gen(dataset, ncalib=100):
+ # Representative dataset generator for use with converter.representative_dataset, returns a generator of np arrays
+ for n, (path, img, im0s, vid_cap, string) in enumerate(dataset):
+ im = np.transpose(img, [1, 2, 0])
+ im = np.expand_dims(im, axis=0).astype(np.float32)
+ im /= 255
+ yield [im]
+ if n >= ncalib:
+ break
+
+
+def run(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=(640, 640), # inference size h,w
+ batch_size=1, # batch size
+ dynamic=False, # dynamic batch size
+):
+ # PyTorch model
+ im = torch.zeros((batch_size, 3, *imgsz)) # BCHW image
+ model = attempt_load(weights, device=torch.device('cpu'), inplace=True, fuse=False)
+ _ = model(im) # inference
+ model.info()
+
+ # TensorFlow model
+ im = tf.zeros((batch_size, *imgsz, 3)) # BHWC image
+ tf_model = TFModel(cfg=model.yaml, model=model, nc=model.nc, imgsz=imgsz)
+ _ = tf_model.predict(im) # inference
+
+ # Keras model
+ im = keras.Input(shape=(*imgsz, 3), batch_size=None if dynamic else batch_size)
+ keras_model = keras.Model(inputs=im, outputs=tf_model.predict(im))
+ keras_model.summary()
+
+ LOGGER.info('PyTorch, TensorFlow and Keras models successfully verified.\nUse export.py for TF model export.')
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='weights path')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--dynamic', action='store_true', help='dynamic batch size')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/ipex/seg/models/yolo.py b/ipex/seg/models/yolo.py
new file mode 100644
index 000000000..e871892a6
--- /dev/null
+++ b/ipex/seg/models/yolo.py
@@ -0,0 +1,478 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+YOLO-specific modules
+
+Usage:
+ $ python models/yolo.py --cfg yolov5s.yaml
+"""
+
+import argparse
+import contextlib
+import os
+import platform
+import sys
+from copy import deepcopy
+from pathlib import Path
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+if platform.system() != 'Windows':
+ ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import *
+from models.experimental import *
+from utils.autoanchor import check_anchor_order
+from utils.general import LOGGER, check_version, check_yaml, make_divisible, print_args
+from utils.plots import feature_visualization
+from utils.torch_utils import (fuse_conv_and_bn, initialize_weights, model_info, profile, scale_img, select_device,
+ time_sync)
+
+try:
+ import thop # for FLOPs computation
+except ImportError:
+ thop = None
+
+
+class Detect(nn.Module):
+ # YOLOv5 Detect head for detection models
+ stride = None # strides computed during build
+ dynamic = False # force grid reconstruction
+ export = False # export mode
+
+ def __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layer
+ super().__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.empty(1)] * self.nl # init grid
+ self.anchor_grid = [torch.empty(1)] * self.nl # init anchor grid
+ self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+ self.inplace = inplace # use inplace ops (e.g. slice assignment)
+
+ def forward(self, x):
+ z = [] # inference output
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
+
+ y = x[i].clone()
+ y[..., :5 + self.nc].sigmoid_()
+ if self.inplace:
+ y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
+ xy, wh, etc = y.split((2, 2, self.no - 4), 4) # tensor_split((2, 4, 5), 4) if torch 1.8.0
+ xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy
+ wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
+ y = torch.cat((xy, wh, etc), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
+
+ def _make_grid(self, nx=20, ny=20, i=0, torch_1_10=check_version(torch.__version__, '1.10.0')):
+ d = self.anchors[i].device
+ t = self.anchors[i].dtype
+ shape = 1, self.na, ny, nx, 2 # grid shape
+ y, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)
+ yv, xv = torch.meshgrid(y, x, indexing='ij') if torch_1_10 else torch.meshgrid(y, x) # torch>=0.7 compatibility
+ grid = torch.stack((xv, yv), 2).expand(shape) - 0.5 # add grid offset, i.e. y = 2.0 * x - 0.5
+ anchor_grid = (self.anchors[i] * self.stride[i]).view((1, self.na, 1, 1, 2)).expand(shape)
+ return grid, anchor_grid
+
+
+class IDetect(nn.Module):
+ # YOLOR Detect head for detection models
+ stride = None # strides computed during build
+ dynamic = False # force grid reconstruction
+ export = False # export mode
+
+ def __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layer
+ super().__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.empty(1)] * self.nl # init grid
+ self.anchor_grid = [torch.empty(1)] * self.nl # init anchor grid
+ self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+ self.inplace = inplace # use inplace ops (e.g. slice assignment)
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
+
+ def forward(self, x):
+ z = [] # inference output
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
+
+ y = x[i].clone()
+ y[..., :5 + self.nc].sigmoid_()
+ if self.inplace:
+ y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
+ xy, wh, etc = y.split((2, 2, self.no - 4), 4) # tensor_split((2, 4, 5), 4) if torch 1.8.0
+ xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy
+ wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
+ y = torch.cat((xy, wh, etc), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
+
+ def _make_grid(self, nx=20, ny=20, i=0, torch_1_10=check_version(torch.__version__, '1.10.0')):
+ d = self.anchors[i].device
+ t = self.anchors[i].dtype
+ shape = 1, self.na, ny, nx, 2 # grid shape
+ y, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)
+ yv, xv = torch.meshgrid(y, x, indexing='ij') if torch_1_10 else torch.meshgrid(y, x) # torch>=0.7 compatibility
+ grid = torch.stack((xv, yv), 2).expand(shape) - 0.5 # add grid offset, i.e. y = 2.0 * x - 0.5
+ anchor_grid = (self.anchors[i] * self.stride[i]).view((1, self.na, 1, 1, 2)).expand(shape)
+ return grid, anchor_grid
+
+
+class Segment(Detect):
+ # YOLOv5 Segment head for segmentation models
+ def __init__(self, nc=80, anchors=(), nm=32, npr=256, ch=(), inplace=True):
+ super().__init__(nc, anchors, ch, inplace)
+ self.nm = nm # number of masks
+ self.npr = npr # number of protos
+ self.no = 5 + nc + self.nm # number of outputs per anchor
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+ self.proto = Proto(ch[0], self.npr, self.nm) # protos
+ self.detect = Detect.forward
+
+ def forward(self, x):
+ p = self.proto(x[0])
+ x = self.detect(self, x)
+ return (x, p) if self.training else (x[0], p) if self.export else (x[0], (x[1], p))
+
+
+class ISegment(IDetect):
+ # YOLOR Segment head for segmentation models
+ def __init__(self, nc=80, anchors=(), nm=32, npr=256, ch=(), inplace=True):
+ super().__init__(nc, anchors, ch, inplace)
+ self.nm = nm # number of masks
+ self.npr = npr # number of protos
+ self.no = 5 + nc + self.nm # number of outputs per anchor
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+ self.proto = Proto(ch[0], self.npr, self.nm) # protos
+ self.detect = IDetect.forward
+
+ def forward(self, x):
+ p = self.proto(x[0])
+ x = self.detect(self, x)
+ return (x, p) if self.training else (x[0], p) if self.export else (x[0], (x[1], p))
+
+
+class IRSegment(IDetect):
+ # YOLOR Segment head for segmentation models
+ def __init__(self, nc=80, anchors=(), nm=32, npr=256, ch=(), inplace=True):
+ super().__init__(nc, anchors, ch, inplace)
+ self.nm = nm # number of masks
+ self.npr = npr # number of protos
+ self.no = 5 + nc + self.nm # number of outputs per anchor
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[self.nl:]) # output conv
+ self.refine = Refine(ch[:self.nl], self.npr, self.nm) # protos
+ self.detect = IDetect.forward
+
+ def forward(self, x):
+ p = self.refine(x[:self.nl])
+ x = self.detect(self, x[self.nl:])
+ return (x, p) if self.training else (x[0], p) if self.export else (x[0], (x[1], p))
+
+
+class BaseModel(nn.Module):
+ # YOLOv5 base model
+ def forward(self, x, profile=False, visualize=False):
+ return self._forward_once(x, profile, visualize) # single-scale inference, train
+
+ def _forward_once(self, x, profile=False, visualize=False):
+ y, dt = [], [] # outputs
+ for m in self.model:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+ if profile:
+ self._profile_one_layer(m, x, dt)
+ x = m(x) # run
+ y.append(x if m.i in self.save else None) # save output
+ if visualize:
+ feature_visualization(x, m.type, m.i, save_dir=visualize)
+ return x
+
+ def _profile_one_layer(self, m, x, dt):
+ c = m == self.model[-1] # is final layer, copy input as inplace fix
+ o = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPs
+ t = time_sync()
+ for _ in range(10):
+ m(x.copy() if c else x)
+ dt.append((time_sync() - t) * 100)
+ if m == self.model[0]:
+ LOGGER.info(f"{'time (ms)':>10s} {'GFLOPs':>10s} {'params':>10s} module")
+ LOGGER.info(f'{dt[-1]:10.2f} {o:10.2f} {m.np:10.0f} {m.type}')
+ if c:
+ LOGGER.info(f"{sum(dt):10.2f} {'-':>10s} {'-':>10s} Total")
+
+ def fuse(self): # fuse model Conv2d() + BatchNorm2d() layers
+ LOGGER.info('Fusing layers... ')
+ for m in self.model.modules():
+ if isinstance(m, (Conv, DWConv)) and hasattr(m, 'bn'):
+ m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
+ delattr(m, 'bn') # remove batchnorm
+ m.forward = m.forward_fuse # update forward
+ self.info()
+ return self
+
+ def info(self, verbose=False, img_size=640): # print model information
+ model_info(self, verbose, img_size)
+
+ def _apply(self, fn):
+ # Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers
+ self = super()._apply(fn)
+ m = self.model[-1] # Detect()
+ if isinstance(m, (Detect, IDetect, Segment, ISegment, IRSegment)):
+ m.stride = fn(m.stride)
+ m.grid = list(map(fn, m.grid))
+ if isinstance(m.anchor_grid, list):
+ m.anchor_grid = list(map(fn, m.anchor_grid))
+ return self
+
+
+class DetectionModel(BaseModel):
+ # YOLOv5 detection model
+ def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classes
+ super().__init__()
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg, encoding='ascii', errors='ignore') as f:
+ self.yaml = yaml.safe_load(f) # model dict
+
+ # Define model
+ ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels
+ if nc and nc != self.yaml['nc']:
+ LOGGER.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ if anchors:
+ LOGGER.info(f'Overriding model.yaml anchors with anchors={anchors}')
+ self.yaml['anchors'] = round(anchors) # override yaml value
+ self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist
+ self.names = [str(i) for i in range(self.yaml['nc'])] # default names
+ self.inplace = self.yaml.get('inplace', True)
+
+ # Build strides, anchors
+ m = self.model[-1] # Detect()
+ if isinstance(m, (Detect, IDetect, Segment, ISegment, IRSegment)):
+ s = 256 # 2x min stride
+ m.inplace = self.inplace
+ forward = lambda x: self.forward(x)[0] if isinstance(m, (Segment, ISegment, IRSegment)) else self.forward(x)
+ m.stride = torch.tensor([s / x.shape[-2] for x in forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+
+ # Init weights, biases
+ initialize_weights(self)
+ self.info()
+ LOGGER.info('')
+
+ def forward(self, x, augment=False, profile=False, visualize=False):
+ if augment:
+ return self._forward_augment(x) # augmented inference, None
+ return self._forward_once(x, profile, visualize) # single-scale inference, train
+
+ def _forward_augment(self, x):
+ img_size = x.shape[-2:] # height, width
+ s = [1, 0.83, 0.67] # scales
+ f = [None, 3, None] # flips (2-ud, 3-lr)
+ y = [] # outputs
+ for si, fi in zip(s, f):
+ xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
+ yi = self._forward_once(xi)[0] # forward
+ # cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # save
+ yi = self._descale_pred(yi, fi, si, img_size)
+ y.append(yi)
+ y = self._clip_augmented(y) # clip augmented tails
+ return torch.cat(y, 1), None # augmented inference, train
+
+ def _descale_pred(self, p, flips, scale, img_size):
+ # de-scale predictions following augmented inference (inverse operation)
+ if self.inplace:
+ p[..., :4] /= scale # de-scale
+ if flips == 2:
+ p[..., 1] = img_size[0] - p[..., 1] # de-flip ud
+ elif flips == 3:
+ p[..., 0] = img_size[1] - p[..., 0] # de-flip lr
+ else:
+ x, y, wh = p[..., 0:1] / scale, p[..., 1:2] / scale, p[..., 2:4] / scale # de-scale
+ if flips == 2:
+ y = img_size[0] - y # de-flip ud
+ elif flips == 3:
+ x = img_size[1] - x # de-flip lr
+ p = torch.cat((x, y, wh, p[..., 4:]), -1)
+ return p
+
+ def _clip_augmented(self, y):
+ # Clip YOLOv5 augmented inference tails
+ nl = self.model[-1].nl # number of detection layers (P3-P5)
+ g = sum(4 ** x for x in range(nl)) # grid points
+ e = 1 # exclude layer count
+ i = (y[0].shape[1] // g) * sum(4 ** x for x in range(e)) # indices
+ y[0] = y[0][:, :-i] # large
+ i = (y[-1].shape[1] // g) * sum(4 ** (nl - 1 - x) for x in range(e)) # indices
+ y[-1] = y[-1][:, i:] # small
+ return y
+
+ def _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:5 + m.nc] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+
+Model = DetectionModel # retain YOLOv5 'Model' class for backwards compatibility
+
+
+class SegmentationModel(DetectionModel):
+ # YOLOv5 segmentation model
+ def __init__(self, cfg='yolov5s-seg.yaml', ch=3, nc=None, anchors=None):
+ super().__init__(cfg, ch, nc, anchors)
+
+
+class ClassificationModel(BaseModel):
+ # YOLOv5 classification model
+ def __init__(self, cfg=None, model=None, nc=1000, cutoff=10): # yaml, model, number of classes, cutoff index
+ super().__init__()
+ self._from_detection_model(model, nc, cutoff) if model is not None else self._from_yaml(cfg)
+
+ def _from_detection_model(self, model, nc=1000, cutoff=10):
+ # Create a YOLOv5 classification model from a YOLOv5 detection model
+ if isinstance(model, DetectMultiBackend):
+ model = model.model # unwrap DetectMultiBackend
+ model.model = model.model[:cutoff] # backbone
+ m = model.model[-1] # last layer
+ ch = m.conv.in_channels if hasattr(m, 'conv') else m.cv1.conv.in_channels # ch into module
+ c = Classify(ch, nc) # Classify()
+ c.i, c.f, c.type = m.i, m.f, 'models.common.Classify' # index, from, type
+ model.model[-1] = c # replace
+ self.model = model.model
+ self.stride = model.stride
+ self.save = []
+ self.nc = nc
+
+ def _from_yaml(self, cfg):
+ # Create a YOLOv5 classification model from a *.yaml file
+ self.model = None
+
+
+def parse_model(d, ch): # model_dict, input_channels(3)
+ LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ with contextlib.suppress(NameError):
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+
+ n = n_ = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in {
+ Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, MixConv2d, Focus, CrossConv,
+ BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x, SPPCSPC}:
+ c1, c2 = ch[f], args[0]
+ if c2 != no: # if not output
+ c2 = make_divisible(c2 * gw, 8)
+
+ args = [c1, c2, *args[1:]]
+ if m in {BottleneckCSP, C3, C3TR, C3Ghost, C3x, SPPCSPC}:
+ args.insert(2, n) # number of repeats
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum(ch[x] for x in f)
+ # TODO: channel, gw, gd
+ elif m in {Detect, IDetect, Segment, ISegment, IRSegment}:
+ args.append([ch[x] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ if m in {Segment, ISegment, IRSegment}:
+ args[3] = make_divisible(args[3] * gw, 8)
+ elif m is Contract:
+ c2 = ch[f] * args[0] ** 2
+ elif m is Expand:
+ c2 = ch[f] // args[0] ** 2
+ else:
+ c2 = ch[f]
+
+ m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum(x.numel() for x in m_.parameters()) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ LOGGER.info(f'{i:>3}{str(f):>18}{n_:>3}{np:10.0f} {t:<40}{str(args):<30}') # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ if i == 0:
+ ch = []
+ ch.append(c2)
+ return nn.Sequential(*layers), sorted(save)
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--cfg', type=str, default='yolov5s.yaml', help='model.yaml')
+ parser.add_argument('--batch-size', type=int, default=1, help='total batch size for all GPUs')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--profile', action='store_true', help='profile model speed')
+ parser.add_argument('--line-profile', action='store_true', help='profile model speed layer by layer')
+ parser.add_argument('--test', action='store_true', help='test all yolo*.yaml')
+ opt = parser.parse_args()
+ opt.cfg = check_yaml(opt.cfg) # check YAML
+ print_args(vars(opt))
+ device = select_device(opt.device)
+
+ # Create model
+ im = torch.rand(opt.batch_size, 3, 640, 640).to(device)
+ model = Model(opt.cfg).to(device)
+
+ # Options
+ if opt.line_profile: # profile layer by layer
+ model(im, profile=True)
+
+ elif opt.profile: # profile forward-backward
+ results = profile(input=im, ops=[model], n=3)
+
+ elif opt.test: # test all models
+ for cfg in Path(ROOT / 'models').rglob('yolo*.yaml'):
+ try:
+ _ = Model(cfg)
+ except Exception as e:
+ print(f'Error in {cfg}: {e}')
+
+ else: # report fused model summary
+ model.fuse()
diff --git a/ipex/seg/requirements.txt b/ipex/seg/requirements.txt
new file mode 100644
index 000000000..10620566c
--- /dev/null
+++ b/ipex/seg/requirements.txt
@@ -0,0 +1,43 @@
+# YOLOv5 requirements
+# Usage: pip install -r requirements.txt
+
+# Base ----------------------------------------
+matplotlib>=3.2.2
+numpy>=1.18.5
+opencv-python>=4.1.1
+Pillow>=7.1.2
+PyYAML>=5.3.1
+requests>=2.23.0
+scipy>=1.4.1
+torch>=1.7.0
+torchvision>=0.8.1
+tqdm>=4.64.0
+protobuf<=3.20.1 # https://github.com/ultralytics/yolov5/issues/8012
+
+# Logging -------------------------------------
+tensorboard>=2.4.1
+# wandb
+# clearml
+
+# Plotting ------------------------------------
+pandas>=1.1.4
+seaborn>=0.11.0
+
+# Export --------------------------------------
+# coremltools>=5.2 # CoreML export
+# onnx>=1.9.0 # ONNX export
+# onnx-simplifier>=0.4.1 # ONNX simplifier
+# nvidia-pyindex # TensorRT export
+# nvidia-tensorrt # TensorRT export
+# scikit-learn==0.19.2 # CoreML quantization
+# tensorflow>=2.4.1 # TFLite export (or tensorflow-cpu, tensorflow-aarch64)
+# tensorflowjs>=3.9.0 # TF.js export
+# openvino-dev # OpenVINO export
+
+# Extras --------------------------------------
+ipython # interactive notebook
+psutil # system utilization
+thop>=0.1.1 # FLOPs computation
+# albumentations>=1.0.3
+# pycocotools>=2.0 # COCO mAP
+# roboflow
diff --git a/ipex/seg/segment/predict.py b/ipex/seg/segment/predict.py
new file mode 100644
index 000000000..c5b755ad1
--- /dev/null
+++ b/ipex/seg/segment/predict.py
@@ -0,0 +1,265 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run YOLOv5 segmentation inference on images, videos, directories, streams, etc.
+
+Usage - sources:
+ $ python segment/predict.py --weights yolov5s-seg.pt --source 0 # webcam
+ img.jpg # image
+ vid.mp4 # video
+ path/ # directory
+ 'path/*.jpg' # glob
+ 'https://youtu.be/Zgi9g1ksQHc' # YouTube
+ 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
+
+Usage - formats:
+ $ python segment/predict.py --weights yolov5s-seg.pt # PyTorch
+ yolov5s-seg.torchscript # TorchScript
+ yolov5s-seg.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s-seg.xml # OpenVINO
+ yolov5s-seg.engine # TensorRT
+ yolov5s-seg.mlmodel # CoreML (macOS-only)
+ yolov5s-seg_saved_model # TensorFlow SavedModel
+ yolov5s-seg.pb # TensorFlow GraphDef
+ yolov5s-seg.tflite # TensorFlow Lite
+ yolov5s-seg_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import os
+import platform
+import sys
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.dataloaders import IMG_FORMATS, VID_FORMATS, LoadImages, LoadStreams
+from utils.general import (LOGGER, Profile, check_file, check_img_size, check_imshow, check_requirements, colorstr, cv2,
+ increment_path, non_max_suppression, print_args, scale_coords, strip_optimizer, xyxy2xywh)
+from utils.plots import Annotator, colors, save_one_box
+from utils.segment.general import process_mask, scale_masks
+from utils.segment.plots import plot_masks
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+@smart_inference_mode()
+def run(
+ weights=ROOT / 'yolov5s-seg.pt', # model.pt path(s)
+ source=ROOT / 'data/images', # file/dir/URL/glob, 0 for webcam
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ imgsz=(640, 640), # inference size (height, width)
+ conf_thres=0.25, # confidence threshold
+ iou_thres=0.45, # NMS IOU threshold
+ max_det=1000, # maximum detections per image
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ view_img=False, # show results
+ save_txt=False, # save results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_crop=False, # save cropped prediction boxes
+ nosave=False, # do not save images/videos
+ classes=None, # filter by class: --class 0, or --class 0 2 3
+ agnostic_nms=False, # class-agnostic NMS
+ augment=False, # augmented inference
+ visualize=False, # visualize features
+ update=False, # update all models
+ project=ROOT / 'runs/predict-seg', # save results to project/name
+ name='exp', # save results to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ line_thickness=3, # bounding box thickness (pixels)
+ hide_labels=False, # hide labels
+ hide_conf=False, # hide confidences
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+):
+ source = str(source)
+ save_img = not nosave and not source.endswith('.txt') # save inference images
+ is_file = Path(source).suffix[1:] in (IMG_FORMATS + VID_FORMATS)
+ is_url = source.lower().startswith(('rtsp://', 'rtmp://', 'http://', 'https://'))
+ webcam = source.isnumeric() or source.endswith('.txt') or (is_url and not is_file)
+ if is_url and is_file:
+ source = check_file(source) # download
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ device = select_device(device)
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, names, pt = model.stride, model.names, model.pt
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+
+ # Dataloader
+ if webcam:
+ view_img = check_imshow()
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride, auto=pt)
+ bs = len(dataset) # batch_size
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt)
+ bs = 1 # batch_size
+ vid_path, vid_writer = [None] * bs, [None] * bs
+
+ # Run inference
+ model.warmup(imgsz=(1 if pt else bs, 3, *imgsz)) # warmup
+ seen, windows, dt = 0, [], (Profile(), Profile(), Profile())
+ for path, im, im0s, vid_cap, s in dataset:
+ with dt[0]:
+ im = torch.from_numpy(im).to(device)
+ im = im.half() if model.fp16 else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ if len(im.shape) == 3:
+ im = im[None] # expand for batch dim
+
+ # Inference
+ with dt[1]:
+ visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False
+ pred, out = model(im, augment=augment, visualize=visualize)
+ proto = out[1]
+
+ # NMS
+ with dt[2]:
+ pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det, nm=32)
+
+ # Second-stage classifier (optional)
+ # pred = utils.general.apply_classifier(pred, classifier_model, im, im0s)
+
+ # Process predictions
+ for i, det in enumerate(pred): # per image
+ seen += 1
+ if webcam: # batch_size >= 1
+ p, im0, frame = path[i], im0s[i].copy(), dataset.count
+ s += f'{i}: '
+ else:
+ p, im0, frame = path, im0s.copy(), getattr(dataset, 'frame', 0)
+
+ p = Path(p) # to Path
+ save_path = str(save_dir / p.name) # im.jpg
+ txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # im.txt
+ s += '%gx%g ' % im.shape[2:] # print string
+ gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
+ imc = im0.copy() if save_crop else im0 # for save_crop
+ annotator = Annotator(im0, line_width=line_thickness, example=str(names))
+ if len(det):
+ masks = process_mask(proto[i], det[:, 6:], det[:, :4], im.shape[2:], upsample=True) # HWC
+
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(im.shape[2:], det[:, :4], im0.shape).round()
+
+ # Print results
+ for c in det[:, 5].unique():
+ n = (det[:, 5] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Mask plotting ----------------------------------------------------------------------------------------
+ mcolors = [colors(int(cls), True) for cls in det[:, 5]]
+ im_masks = plot_masks(im[i], masks, mcolors) # image with masks shape(imh,imw,3)
+ annotator.im = scale_masks(im.shape[2:], im_masks, im0.shape) # scale to original h, w
+ # Mask plotting ----------------------------------------------------------------------------------------
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det[:, :6]):
+ if save_txt: # Write to file
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(f'{txt_path}.txt', 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+ if save_img or save_crop or view_img: # Add bbox to image
+ c = int(cls) # integer class
+ label = None if hide_labels else (names[c] if hide_conf else f'{names[c]} {conf:.2f}')
+ annotator.box_label(xyxy, label, color=colors(c, True))
+ if save_crop:
+ save_one_box(xyxy, imc, file=save_dir / 'crops' / names[c] / f'{p.stem}.jpg', BGR=True)
+
+ # Stream results
+ im0 = annotator.result()
+ if view_img:
+ if platform.system() == 'Linux' and p not in windows:
+ windows.append(p)
+ cv2.namedWindow(str(p), cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO) # allow window resize (Linux)
+ cv2.resizeWindow(str(p), im0.shape[1], im0.shape[0])
+ cv2.imshow(str(p), im0)
+ cv2.waitKey(1) # 1 millisecond
+
+ # Save results (image with detections)
+ if save_img:
+ if dataset.mode == 'image':
+ cv2.imwrite(save_path, im0)
+ else: # 'video' or 'stream'
+ if vid_path[i] != save_path: # new video
+ vid_path[i] = save_path
+ if isinstance(vid_writer[i], cv2.VideoWriter):
+ vid_writer[i].release() # release previous video writer
+ if vid_cap: # video
+ fps = vid_cap.get(cv2.CAP_PROP_FPS)
+ w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ else: # stream
+ fps, w, h = 30, im0.shape[1], im0.shape[0]
+ save_path = str(Path(save_path).with_suffix('.mp4')) # force *.mp4 suffix on results videos
+ vid_writer[i] = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
+ vid_writer[i].write(im0)
+
+ # Print time (inference-only)
+ LOGGER.info(f"{s}{'' if len(det) else '(no detections), '}{dt[1].dt * 1E3:.1f}ms")
+
+ # Print results
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {(1, 3, *imgsz)}' % t)
+ if save_txt or save_img:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ if update:
+ strip_optimizer(weights[0]) # update model (to fix SourceChangeWarning)
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s-seg.pt', help='model path(s)')
+ parser.add_argument('--source', type=str, default=ROOT / 'data/images', help='file/dir/URL/glob, 0 for webcam')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='(optional) dataset.yaml path')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=1000, help='maximum detections per image')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--view-img', action='store_true', help='show results')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-crop', action='store_true', help='save cropped prediction boxes')
+ parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
+ parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --classes 0, or --classes 0 2 3')
+ parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--visualize', action='store_true', help='visualize features')
+ parser.add_argument('--update', action='store_true', help='update all models')
+ parser.add_argument('--project', default=ROOT / 'runs/predict-seg', help='save results to project/name')
+ parser.add_argument('--name', default='exp', help='save results to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--line-thickness', default=3, type=int, help='bounding box thickness (pixels)')
+ parser.add_argument('--hide-labels', default=False, action='store_true', help='hide labels')
+ parser.add_argument('--hide-conf', default=False, action='store_true', help='hide confidences')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/ipex/seg/segment/train.py b/ipex/seg/segment/train.py
new file mode 100644
index 000000000..69dd09a6e
--- /dev/null
+++ b/ipex/seg/segment/train.py
@@ -0,0 +1,681 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Train a YOLOv5 segment model on a segment dataset
+Models and datasets download automatically from the latest YOLOv5 release.
+
+Usage - Single-GPU training:
+ $ python segment/train.py --data coco128-seg.yaml --weights yolov5s-seg.pt --img 640 # from pretrained (recommended)
+ $ python segment/train.py --data coco128-seg.yaml --weights '' --cfg yolov5s-seg.yaml --img 640 # from scratch
+
+Usage - Multi-GPU DDP training:
+ $ python -m torch.distributed.run --nproc_per_node 4 --master_port 1 segment/train.py --data coco128-seg.yaml --weights yolov5s-seg.pt --img 640 --device 0,1,2,3
+
+Models: https://github.com/ultralytics/yolov5/tree/master/models
+Datasets: https://github.com/ultralytics/yolov5/tree/master/data
+Tutorial: https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data
+"""
+
+import argparse
+import math
+import os
+import random
+import sys
+import time
+from copy import deepcopy
+from datetime import datetime
+from pathlib import Path
+
+import numpy as np
+import torch
+import torch.distributed as dist
+import torch.nn as nn
+import yaml
+from torch.optim import lr_scheduler
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+import torch.nn.functional as F
+
+import segment.val as validate # for end-of-epoch mAP
+from models.experimental import attempt_load
+from models.yolo import SegmentationModel
+from utils.autoanchor import check_anchors
+from utils.autobatch import check_train_batch_size
+from utils.callbacks import Callbacks
+from utils.downloads import attempt_download, is_url
+from utils.general import (LOGGER, check_amp, check_dataset, check_file, check_git_status, check_img_size,
+ check_requirements, check_suffix, check_yaml, colorstr, get_latest_run, increment_path,
+ init_seeds, intersect_dicts, labels_to_class_weights, labels_to_image_weights, one_cycle,
+ print_args, print_mutation, strip_optimizer, yaml_save)
+from utils.loggers import GenericLogger
+from utils.plots import plot_evolve, plot_labels
+from utils.segment.dataloaders import create_dataloader
+from utils.segment.loss import ComputeLoss
+from utils.segment.metrics import KEYS, fitness
+from utils.segment.plots import plot_images_and_masks, plot_results_with_masks
+from utils.torch_utils import (EarlyStopping, ModelEMA, de_parallel, select_device, smart_DDP, smart_optimizer,
+ smart_resume, torch_distributed_zero_first)
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+
+def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictionary
+ save_dir, epochs, batch_size, weights, single_cls, evolve, data, cfg, resume, noval, nosave, workers, freeze, mask_ratio = \
+ Path(opt.save_dir), opt.epochs, opt.batch_size, opt.weights, opt.single_cls, opt.evolve, opt.data, opt.cfg, \
+ opt.resume, opt.noval, opt.nosave, opt.workers, opt.freeze, opt.mask_ratio
+ # callbacks.run('on_pretrain_routine_start')
+
+ # Directories
+ w = save_dir / 'weights' # weights dir
+ (w.parent if evolve else w).mkdir(parents=True, exist_ok=True) # make dir
+ last, best = w / 'last.pt', w / 'best.pt'
+
+ # Hyperparameters
+ if isinstance(hyp, str):
+ with open(hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ LOGGER.info(colorstr('hyperparameters: ') + ', '.join(f'{k}={v}' for k, v in hyp.items()))
+ opt.hyp = hyp.copy() # for saving hyps to checkpoints
+
+ # Save run settings
+ if not evolve:
+ yaml_save(save_dir / 'hyp.yaml', hyp)
+ yaml_save(save_dir / 'opt.yaml', vars(opt))
+
+ # Loggers
+ data_dict = None
+ if RANK in {-1, 0}:
+ logger = GenericLogger(opt=opt, console_logger=LOGGER)
+ # loggers = Loggers(save_dir, weights, opt, hyp, LOGGER) # loggers instance
+ # if loggers.clearml:
+ # data_dict = loggers.clearml.data_dict # None if no ClearML dataset or filled in by ClearML
+ # if loggers.wandb:
+ # data_dict = loggers.wandb.data_dict
+ # if resume:
+ # weights, epochs, hyp, batch_size = opt.weights, opt.epochs, opt.hyp, opt.batch_size
+ #
+ # # Register actions
+ # for k in methods(loggers):
+ # callbacks.register_action(k, callback=getattr(loggers, k))
+
+ # Config
+ plots = not evolve and not opt.noplots # create plots
+ overlap = not opt.no_overlap
+ cuda = device.type != 'cpu'
+ init_seeds(opt.seed + 1 + RANK, deterministic=True)
+ with torch_distributed_zero_first(LOCAL_RANK):
+ data_dict = data_dict or check_dataset(data) # check if None
+ train_path, val_path = data_dict['train'], data_dict['val']
+ nc = 1 if single_cls else int(data_dict['nc']) # number of classes
+ names = {0: 'item'} if single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
+ is_coco = isinstance(val_path, str) and val_path.endswith('coco/val2017.txt') # COCO dataset
+
+ # Model
+ check_suffix(weights, '.pt') # check weights
+ pretrained = weights.endswith('.pt')
+ if pretrained:
+ with torch_distributed_zero_first(LOCAL_RANK):
+ weights = attempt_download(weights) # download if not found locally
+ ckpt = torch.load(weights, map_location='cpu') # load checkpoint to CPU to avoid CUDA memory leak
+ model = SegmentationModel(cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device)
+ exclude = ['anchor'] if (cfg or hyp.get('anchors')) and not resume else [] # exclude keys
+ csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
+ csd = intersect_dicts(csd, model.state_dict(), exclude=exclude) # intersect
+ model.load_state_dict(csd, strict=False) # load
+ LOGGER.info(f'Transferred {len(csd)}/{len(model.state_dict())} items from {weights}') # report
+ else:
+ model = SegmentationModel(cfg, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ amp = check_amp(model) # check AMP
+
+ # Freeze
+ freeze = [f'model.{x}.' for x in (freeze if len(freeze) > 1 else range(freeze[0]))] # layers to freeze
+ for k, v in model.named_parameters():
+ v.requires_grad = True # train all layers
+ # v.register_hook(lambda x: torch.nan_to_num(x)) # NaN to 0 (commented for erratic training results)
+ if any(x in k for x in freeze):
+ LOGGER.info(f'freezing {k}')
+ v.requires_grad = False
+
+ # Image size
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ imgsz = check_img_size(opt.imgsz, gs, floor=gs * 2) # verify imgsz is gs-multiple
+
+ # Batch size
+ if RANK == -1 and batch_size == -1: # single-GPU only, estimate best batch size
+ batch_size = check_train_batch_size(model, imgsz, amp)
+ logger.update_params({"batch_size": batch_size})
+ # loggers.on_params_update({"batch_size": batch_size})
+
+ # Optimizer
+ nbs = 64 # nominal batch size
+ accumulate = max(round(nbs / batch_size), 1) # accumulate loss before optimizing
+ hyp['weight_decay'] *= batch_size * accumulate / nbs # scale weight_decay
+ optimizer = smart_optimizer(model, opt.optimizer, hyp['lr0'], hyp['momentum'], hyp['weight_decay'])
+
+ # Scheduler
+ if opt.cos_lr:
+ lf = one_cycle(1, hyp['lrf'], epochs) # cosine 1->hyp['lrf']
+ else:
+ lf = lambda x: (1 - x / epochs) * (1.0 - hyp['lrf']) + hyp['lrf'] # linear
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf) # plot_lr_scheduler(optimizer, scheduler, epochs)
+
+ # EMA
+ ema = ModelEMA(model) if RANK in {-1, 0} else None
+
+ # Resume
+ best_fitness, start_epoch = 0.0, 0
+ if pretrained:
+ if resume:
+ best_fitness, start_epoch, epochs = smart_resume(ckpt, optimizer, ema, weights, epochs, resume)
+ del ckpt, csd
+
+ # DP mode
+ if cuda and RANK == -1 and torch.cuda.device_count() > 1:
+ LOGGER.warning('WARNING: DP not recommended, use torch.distributed.run for best DDP Multi-GPU results.\n'
+ 'See Multi-GPU Tutorial at https://github.com/ultralytics/yolov5/issues/475 to get started.')
+ model = torch.nn.DataParallel(model)
+
+ # SyncBatchNorm
+ if opt.sync_bn and cuda and RANK != -1:
+ model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
+ LOGGER.info('Using SyncBatchNorm()')
+
+ # Trainloader
+ train_loader, dataset = create_dataloader(
+ train_path,
+ imgsz,
+ batch_size // WORLD_SIZE,
+ gs,
+ single_cls,
+ hyp=hyp,
+ augment=True,
+ cache=None if opt.cache == 'val' else opt.cache,
+ rect=opt.rect,
+ rank=LOCAL_RANK,
+ workers=workers,
+ image_weights=opt.image_weights,
+ quad=opt.quad,
+ prefix=colorstr('train: '),
+ shuffle=True,
+ mask_downsample_ratio=mask_ratio,
+ overlap_mask=overlap,
+ )
+ labels = np.concatenate(dataset.labels, 0)
+ mlc = int(labels[:, 0].max()) # max label class
+ assert mlc < nc, f'Label class {mlc} exceeds nc={nc} in {data}. Possible class labels are 0-{nc - 1}'
+
+ # Process 0
+ if RANK in {-1, 0}:
+ val_loader = create_dataloader(val_path,
+ imgsz,
+ batch_size // WORLD_SIZE * 2,
+ gs,
+ single_cls,
+ hyp=hyp,
+ cache=None if noval else opt.cache,
+ rect=True,
+ rank=-1,
+ workers=workers * 2,
+ pad=0.5,
+ mask_downsample_ratio=mask_ratio,
+ overlap_mask=overlap,
+ prefix=colorstr('val: '))[0]
+
+ if not resume:
+ if not opt.noautoanchor:
+ check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz) # run AutoAnchor
+ model.half().float() # pre-reduce anchor precision
+
+ if plots:
+ plot_labels(labels, names, save_dir)
+ # callbacks.run('on_pretrain_routine_end', labels, names)
+
+ # DDP mode
+ if cuda and RANK != -1:
+ model = smart_DDP(model)
+
+ # Model attributes
+ nl = de_parallel(model).model[-1].nl # number of detection layers (to scale hyps)
+ hyp['box'] *= 3 / nl # scale to layers
+ hyp['cls'] *= nc / 80 * 3 / nl # scale to classes and layers
+ hyp['obj'] *= (imgsz / 640) ** 2 * 3 / nl # scale to image size and layers
+ hyp['label_smoothing'] = opt.label_smoothing
+ model.nc = nc # attach number of classes to model
+ model.hyp = hyp # attach hyperparameters to model
+ model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
+ model.names = names
+
+ # Start training
+ t0 = time.time()
+ nb = len(train_loader) # number of batches
+ nw = max(round(hyp['warmup_epochs'] * nb), 100) # number of warmup iterations, max(3 epochs, 100 iterations)
+ # nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
+ last_opt_step = -1
+ maps = np.zeros(nc) # mAP per class
+ results = (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
+ scheduler.last_epoch = start_epoch - 1 # do not move
+ scaler = torch.cuda.amp.GradScaler(enabled=amp)
+ stopper, stop = EarlyStopping(patience=opt.patience), False
+ compute_loss = ComputeLoss(model, overlap=overlap) # init loss class
+ # callbacks.run('on_train_start')
+ LOGGER.info(f'Image sizes {imgsz} train, {imgsz} val\n'
+ f'Using {train_loader.num_workers * WORLD_SIZE} dataloader workers\n'
+ f"Logging results to {colorstr('bold', save_dir)}\n"
+ f'Starting training for {epochs} epochs...')
+ for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
+ # callbacks.run('on_train_epoch_start')
+ model.train()
+
+ # Update image weights (optional, single-GPU only)
+ if opt.image_weights:
+ cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
+ iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
+ dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
+
+ # Update mosaic border (optional)
+ # b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
+ # dataset.mosaic_border = [b - imgsz, -b] # height, width borders
+
+ mloss = torch.zeros(4, device=device) # mean losses
+ if RANK != -1:
+ train_loader.sampler.set_epoch(epoch)
+ pbar = enumerate(train_loader)
+ LOGGER.info(('\n' + '%11s' * 8) %
+ ('Epoch', 'GPU_mem', 'box_loss', 'seg_loss', 'obj_loss', 'cls_loss', 'Instances', 'Size'))
+ if RANK in {-1, 0}:
+ pbar = tqdm(pbar, total=nb, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ optimizer.zero_grad()
+ for i, (imgs, targets, paths, _, masks) in pbar: # batch ------------------------------------------------------
+ # callbacks.run('on_train_batch_start')
+ ni = i + nb * epoch # number integrated batches (since train start)
+ imgs = imgs.to(device, non_blocking=True).float() / 255 # uint8 to float32, 0-255 to 0.0-1.0
+
+ # Warmup
+ if ni <= nw:
+ xi = [0, nw] # x interp
+ # compute_loss.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
+ accumulate = max(1, np.interp(ni, xi, [1, nbs / batch_size]).round())
+ for j, x in enumerate(optimizer.param_groups):
+ # bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
+ x['lr'] = np.interp(ni, xi, [hyp['warmup_bias_lr'] if j == 0 else 0.0, x['initial_lr'] * lf(epoch)])
+ if 'momentum' in x:
+ x['momentum'] = np.interp(ni, xi, [hyp['warmup_momentum'], hyp['momentum']])
+
+ # Multi-scale
+ if opt.multi_scale:
+ sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
+ sf = sz / max(imgs.shape[2:]) # scale factor
+ if sf != 1:
+ ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
+ imgs = nn.functional.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)
+
+ # Forward
+ with torch.cuda.amp.autocast(amp):
+ pred = model(imgs) # forward
+ loss, loss_items = compute_loss(pred, targets.to(device), masks=masks.to(device).float())
+ if RANK != -1:
+ loss *= WORLD_SIZE # gradient averaged between devices in DDP mode
+ if opt.quad:
+ loss *= 4.
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize - https://pytorch.org/docs/master/notes/amp_examples.html
+ if ni - last_opt_step >= accumulate:
+ scaler.unscale_(optimizer) # unscale gradients
+ torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=10.0) # clip gradients
+ scaler.step(optimizer) # optimizer.step
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+ last_opt_step = ni
+
+ # Log
+ if RANK in {-1, 0}:
+ mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
+ mem = f'{torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0:.3g}G' # (GB)
+ pbar.set_description(('%11s' * 2 + '%11.4g' * 6) %
+ (f'{epoch}/{epochs - 1}', mem, *mloss, targets.shape[0], imgs.shape[-1]))
+ # callbacks.run('on_train_batch_end', model, ni, imgs, targets, paths)
+ # if callbacks.stop_training:
+ # return
+
+ # Mosaic plots
+ if mask_ratio != 1:
+ masks = F.interpolate(masks[None].float(), (imgsz, imgsz), mode="bilinear", align_corners=False)[0]
+ if plots:
+ if ni < 3:
+ plot_images_and_masks(imgs, targets, masks, paths, save_dir / f"train_batch{ni}.jpg")
+ if ni == 10:
+ files = sorted(save_dir.glob('train*.jpg'))
+ logger.log_images(files, "Mosaics", epoch)
+ # end batch ------------------------------------------------------------------------------------------------
+
+ # Scheduler
+ lr = [x['lr'] for x in optimizer.param_groups] # for loggers
+ scheduler.step()
+
+ if RANK in {-1, 0}:
+ # mAP
+ # callbacks.run('on_train_epoch_end', epoch=epoch)
+ ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'names', 'stride', 'class_weights'])
+ final_epoch = (epoch + 1 == epochs) or stopper.possible_stop
+ if not noval or final_epoch: # Calculate mAP
+ results, maps, _ = validate.run(data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ half=amp,
+ model=ema.ema,
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ plots=False,
+ callbacks=callbacks,
+ compute_loss=compute_loss,
+ mask_downsample_ratio=mask_ratio,
+ overlap=overlap)
+
+ # Update best mAP
+ fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
+ stop = stopper(epoch=epoch, fitness=fi) # early stop check
+ if fi > best_fitness:
+ best_fitness = fi
+ log_vals = list(mloss) + list(results) + lr
+ # callbacks.run('on_fit_epoch_end', log_vals, epoch, best_fitness, fi)
+ # Log val metrics and media
+ metrics_dict = dict(zip(KEYS, log_vals))
+ logger.log_metrics(metrics_dict, epoch)
+ if plots:
+ files = sorted(save_dir.glob('val*.jpg'))
+ logger.log_images(files, "Validation", epoch)
+
+ # Save model
+ if (not nosave) or (final_epoch and not evolve): # if save
+ ckpt = {
+ 'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'model': deepcopy(de_parallel(model)).half(),
+ 'ema': deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': optimizer.state_dict(),
+ # 'wandb_id': loggers.wandb.wandb_run.id if loggers.wandb else None,
+ 'opt': vars(opt),
+ 'date': datetime.now().isoformat()}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fi:
+ torch.save(ckpt, best)
+ if opt.save_period > 0 and epoch % opt.save_period == 0:
+ torch.save(ckpt, w / f'epoch_{epoch}.pt')
+ logger.log_model(w / f'epoch_{epoch}.pt')
+ del ckpt
+ # callbacks.run('on_model_save', last, epoch, final_epoch, best_fitness, fi)
+
+ # EarlyStopping
+ if RANK != -1: # if DDP training
+ broadcast_list = [stop if RANK == 0 else None]
+ dist.broadcast_object_list(broadcast_list, 0) # broadcast 'stop' to all ranks
+ if RANK != 0:
+ stop = broadcast_list[0]
+ if stop:
+ break # must break all DDP ranks
+
+ # end epoch ----------------------------------------------------------------------------------------------------
+ # end training -----------------------------------------------------------------------------------------------------
+ if RANK in {-1, 0}:
+ LOGGER.info(f'\n{epoch - start_epoch + 1} epochs completed in {(time.time() - t0) / 3600:.3f} hours.')
+ for f in last, best:
+ if f.exists():
+ strip_optimizer(f) # strip optimizers
+ if f is best:
+ LOGGER.info(f'\nValidating {f}...')
+ results, _, _ = validate.run(
+ data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ model=attempt_load(f, device).half(),
+ iou_thres=0.65 if is_coco else 0.60, # best pycocotools at iou 0.65
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ save_json=is_coco,
+ verbose=True,
+ plots=plots,
+ callbacks=callbacks,
+ compute_loss=compute_loss,
+ mask_downsample_ratio=mask_ratio,
+ overlap=overlap) # val best model with plots
+ if is_coco:
+ # callbacks.run('on_fit_epoch_end', list(mloss) + list(results) + lr, epoch, best_fitness, fi)
+ metrics_dict = dict(zip(KEYS, list(mloss) + list(results) + lr))
+ logger.log_metrics(metrics_dict, epoch)
+
+ # callbacks.run('on_train_end', last, best, epoch, results)
+ # on train end callback using genericLogger
+ logger.log_metrics(dict(zip(KEYS[4:16], results)), epochs + 1)
+ if not opt.evolve:
+ logger.log_model(best, epoch + 1)
+ if plots:
+ plot_results_with_masks(file=save_dir / 'results.csv') # save results.png
+ files = ['results.png', 'confusion_matrix.png', *(f'{x}_curve.png' for x in ('F1', 'PR', 'P', 'R'))]
+ files = [(save_dir / f) for f in files if (save_dir / f).exists()] # filter
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}")
+ logger.log_images(files, "Results", epoch + 1)
+
+ torch.cuda.empty_cache()
+ return results
+
+
+def parse_opt(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s-seg.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128-seg.yaml', help='dataset.yaml path')
+ parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch-low.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300, help='total training epochs')
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--noval', action='store_true', help='only validate final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable AutoAnchor')
+ parser.add_argument('--noplots', action='store_true', help='save no plot files')
+ parser.add_argument('--evolve', type=int, nargs='?', const=300, help='evolve hyperparameters for x generations')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--optimizer', type=str, choices=['SGD', 'Adam', 'AdamW'], default='SGD', help='optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default=ROOT / 'runs/train-seg', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--cos-lr', action='store_true', help='cosine LR scheduler')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--patience', type=int, default=100, help='EarlyStopping patience (epochs without improvement)')
+ parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone=10, first3=0 1 2')
+ parser.add_argument('--save-period', type=int, default=-1, help='Save checkpoint every x epochs (disabled if < 1)')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+
+ # Instance Segmentation Args
+ parser.add_argument('--mask-ratio', type=int, default=4, help='Downsample the truth masks to saving memory')
+ parser.add_argument('--no-overlap', action='store_true', help='Overlap masks train faster at slightly less mAP')
+
+ # Weights & Biases arguments
+ # parser.add_argument('--entity', default=None, help='W&B: Entity')
+ # parser.add_argument('--upload_dataset', nargs='?', const=True, default=False, help='W&B: Upload data, "val" option')
+ # parser.add_argument('--bbox_interval', type=int, default=-1, help='W&B: Set bounding-box image logging interval')
+ # parser.add_argument('--artifact_alias', type=str, default='latest', help='W&B: Version of dataset artifact to use')
+
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def main(opt, callbacks=Callbacks()):
+ # Checks
+ if RANK in {-1, 0}:
+ print_args(vars(opt))
+ #check_git_status()
+ #check_requirements()
+
+ # Resume
+ if opt.resume and not opt.evolve: # resume from specified or most recent last.pt
+ last = Path(check_file(opt.resume) if isinstance(opt.resume, str) else get_latest_run())
+ opt_yaml = last.parent.parent / 'opt.yaml' # train options yaml
+ opt_data = opt.data # original dataset
+ if opt_yaml.is_file():
+ with open(opt_yaml, errors='ignore') as f:
+ d = yaml.safe_load(f)
+ else:
+ d = torch.load(last, map_location='cpu')['opt']
+ opt = argparse.Namespace(**d) # replace
+ opt.cfg, opt.weights, opt.resume = '', str(last), True # reinstate
+ if is_url(opt_data):
+ opt.data = check_file(opt_data) # avoid HUB resume auth timeout
+ else:
+ opt.data, opt.cfg, opt.hyp, opt.weights, opt.project = \
+ check_file(opt.data), check_yaml(opt.cfg), check_yaml(opt.hyp), str(opt.weights), str(opt.project) # checks
+ assert len(opt.cfg) or len(opt.weights), 'either --cfg or --weights must be specified'
+ if opt.evolve:
+ if opt.project == str(ROOT / 'runs/train'): # if default project name, rename to runs/evolve
+ opt.project = str(ROOT / 'runs/evolve')
+ opt.exist_ok, opt.resume = opt.resume, False # pass resume to exist_ok and disable resume
+ if opt.name == 'cfg':
+ opt.name = Path(opt.cfg).stem # use model.yaml as name
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok))
+
+ # DDP mode
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if LOCAL_RANK != -1:
+ msg = 'is not compatible with YOLOv5 Multi-GPU DDP training'
+ assert not opt.image_weights, f'--image-weights {msg}'
+ assert not opt.evolve, f'--evolve {msg}'
+ assert opt.batch_size != -1, f'AutoBatch with --batch-size -1 {msg}, please pass a valid --batch-size'
+ assert opt.batch_size % WORLD_SIZE == 0, f'--batch-size {opt.batch_size} must be multiple of WORLD_SIZE'
+ assert torch.cuda.device_count() > LOCAL_RANK, 'insufficient CUDA devices for DDP command'
+ torch.cuda.set_device(LOCAL_RANK)
+ device = torch.device('cuda', LOCAL_RANK)
+ dist.init_process_group(backend="nccl" if dist.is_nccl_available() else "gloo")
+
+ # Train
+ if not opt.evolve:
+ train(opt.hyp, opt, device, callbacks)
+
+ # Evolve hyperparameters (optional)
+ else:
+ # Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)
+ meta = {
+ 'lr0': (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
+ 'lrf': (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
+ 'momentum': (0.3, 0.6, 0.98), # SGD momentum/Adam beta1
+ 'weight_decay': (1, 0.0, 0.001), # optimizer weight decay
+ 'warmup_epochs': (1, 0.0, 5.0), # warmup epochs (fractions ok)
+ 'warmup_momentum': (1, 0.0, 0.95), # warmup initial momentum
+ 'warmup_bias_lr': (1, 0.0, 0.2), # warmup initial bias lr
+ 'box': (1, 0.02, 0.2), # box loss gain
+ 'cls': (1, 0.2, 4.0), # cls loss gain
+ 'cls_pw': (1, 0.5, 2.0), # cls BCELoss positive_weight
+ 'obj': (1, 0.2, 4.0), # obj loss gain (scale with pixels)
+ 'obj_pw': (1, 0.5, 2.0), # obj BCELoss positive_weight
+ 'iou_t': (0, 0.1, 0.7), # IoU training threshold
+ 'anchor_t': (1, 2.0, 8.0), # anchor-multiple threshold
+ 'anchors': (2, 2.0, 10.0), # anchors per output grid (0 to ignore)
+ 'fl_gamma': (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
+ 'hsv_h': (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
+ 'hsv_s': (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
+ 'hsv_v': (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)
+ 'degrees': (1, 0.0, 45.0), # image rotation (+/- deg)
+ 'translate': (1, 0.0, 0.9), # image translation (+/- fraction)
+ 'scale': (1, 0.0, 0.9), # image scale (+/- gain)
+ 'shear': (1, 0.0, 10.0), # image shear (+/- deg)
+ 'perspective': (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
+ 'flipud': (1, 0.0, 1.0), # image flip up-down (probability)
+ 'fliplr': (0, 0.0, 1.0), # image flip left-right (probability)
+ 'mosaic': (1, 0.0, 1.0), # image mixup (probability)
+ 'mixup': (1, 0.0, 1.0), # image mixup (probability)
+ 'copy_paste': (1, 0.0, 1.0)} # segment copy-paste (probability)
+
+ with open(opt.hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ if 'anchors' not in hyp: # anchors commented in hyp.yaml
+ hyp['anchors'] = 3
+ if opt.noautoanchor:
+ del hyp['anchors'], meta['anchors']
+ opt.noval, opt.nosave, save_dir = True, True, Path(opt.save_dir) # only val/save final epoch
+ # ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
+ evolve_yaml, evolve_csv = save_dir / 'hyp_evolve.yaml', save_dir / 'evolve.csv'
+ if opt.bucket:
+ os.system(f'gsutil cp gs://{opt.bucket}/evolve.csv {evolve_csv}') # download evolve.csv if exists
+
+ for _ in range(opt.evolve): # generations to evolve
+ if evolve_csv.exists(): # if evolve.csv exists: select best hyps and mutate
+ # Select parent(s)
+ parent = 'single' # parent selection method: 'single' or 'weighted'
+ x = np.loadtxt(evolve_csv, ndmin=2, delimiter=',', skiprows=1)
+ n = min(5, len(x)) # number of previous results to consider
+ x = x[np.argsort(-fitness(x))][:n] # top n mutations
+ w = fitness(x) - fitness(x).min() + 1E-6 # weights (sum > 0)
+ if parent == 'single' or len(x) == 1:
+ # x = x[random.randint(0, n - 1)] # random selection
+ x = x[random.choices(range(n), weights=w)[0]] # weighted selection
+ elif parent == 'weighted':
+ x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
+
+ # Mutate
+ mp, s = 0.8, 0.2 # mutation probability, sigma
+ npr = np.random
+ npr.seed(int(time.time()))
+ g = np.array([meta[k][0] for k in hyp.keys()]) # gains 0-1
+ ng = len(meta)
+ v = np.ones(ng)
+ while all(v == 1): # mutate until a change occurs (prevent duplicates)
+ v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
+ for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
+ hyp[k] = float(x[i + 7] * v[i]) # mutate
+
+ # Constrain to limits
+ for k, v in meta.items():
+ hyp[k] = max(hyp[k], v[1]) # lower limit
+ hyp[k] = min(hyp[k], v[2]) # upper limit
+ hyp[k] = round(hyp[k], 5) # significant digits
+
+ # Train mutation
+ results = train(hyp.copy(), opt, device, callbacks)
+ callbacks = Callbacks()
+ # Write mutation results
+ print_mutation(results, hyp.copy(), save_dir, opt.bucket)
+
+ # Plot results
+ plot_evolve(evolve_csv)
+ LOGGER.info(f'Hyperparameter evolution finished {opt.evolve} generations\n'
+ f"Results saved to {colorstr('bold', save_dir)}\n"
+ f'Usage example: $ python train.py --hyp {evolve_yaml}')
+
+
+def run(**kwargs):
+ # Usage: import train; train.run(data='coco128.yaml', imgsz=320, weights='yolov5m.pt')
+ opt = parse_opt(True)
+ for k, v in kwargs.items():
+ setattr(opt, k, v)
+ main(opt)
+ return opt
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/ipex/seg/segment/val.py b/ipex/seg/segment/val.py
new file mode 100644
index 000000000..d88b7f7b3
--- /dev/null
+++ b/ipex/seg/segment/val.py
@@ -0,0 +1,471 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a trained YOLOv5 segment model on a segment dataset
+
+Usage:
+ $ bash data/scripts/get_coco.sh --val --segments # download COCO-segments val split (1G, 5000 images)
+ $ python segment/val.py --weights yolov5s-seg.pt --data coco.yaml --img 640- # validate COCO-segments
+
+Usage - formats:
+ $ python segment/val.py --weights yolov5s-seg.pt # PyTorch
+ yolov5s-seg.torchscript # TorchScript
+ yolov5s-seg.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s-seg.xml # OpenVINO
+ yolov5s-seg.engine # TensorRT
+ yolov5s-seg.mlmodel # CoreML (macOS-only)
+ yolov5s-seg_saved_model # TensorFlow SavedModel
+ yolov5s-seg.pb # TensorFlow GraphDef
+ yolov5s-seg.tflite # TensorFlow Lite
+ yolov5s-seg_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import json
+import os
+import sys
+from multiprocessing.pool import ThreadPool
+from pathlib import Path
+
+import numpy as np
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+import torch.nn.functional as F
+
+from models.common import DetectMultiBackend
+from models.yolo import SegmentationModel
+from utils.callbacks import Callbacks
+from utils.general import (LOGGER, NUM_THREADS, Profile, check_dataset, check_img_size, check_requirements, check_yaml,
+ coco80_to_coco91_class, colorstr, increment_path, non_max_suppression, print_args,
+ scale_coords, xywh2xyxy, xyxy2xywh)
+from utils.metrics import ConfusionMatrix, box_iou
+from utils.plots import output_to_target, plot_val_study
+from utils.segment.dataloaders import create_dataloader
+from utils.segment.general import mask_iou, process_mask, process_mask_upsample, scale_masks
+from utils.segment.metrics import Metrics, ap_per_class_box_and_mask
+from utils.segment.plots import plot_images_and_masks
+from utils.torch_utils import de_parallel, select_device, smart_inference_mode
+
+
+def save_one_txt(predn, save_conf, shape, file):
+ # Save one txt result
+ gn = torch.tensor(shape)[[1, 0, 1, 0]] # normalization gain whwh
+ for *xyxy, conf, cls in predn.tolist():
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(file, 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+
+def save_one_json(predn, jdict, path, class_map, pred_masks):
+ # Save one JSON result {"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}
+ from pycocotools.mask import encode
+
+ def single_encode(x):
+ rle = encode(np.asarray(x[:, :, None], order="F", dtype="uint8"))[0]
+ rle["counts"] = rle["counts"].decode("utf-8")
+ return rle
+
+ image_id = int(path.stem) if path.stem.isnumeric() else path.stem
+ box = xyxy2xywh(predn[:, :4]) # xywh
+ box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
+ pred_masks = np.transpose(pred_masks, (2, 0, 1))
+ with ThreadPool(NUM_THREADS) as pool:
+ rles = pool.map(single_encode, pred_masks)
+ for i, (p, b) in enumerate(zip(predn.tolist(), box.tolist())):
+ jdict.append({
+ 'image_id': image_id,
+ 'category_id': class_map[int(p[5])],
+ 'bbox': [round(x, 3) for x in b],
+ 'score': round(p[4], 5),
+ 'segmentation': rles[i]})
+
+
+def process_batch(detections, labels, iouv, pred_masks=None, gt_masks=None, overlap=False, masks=False):
+ """
+ Return correct prediction matrix
+ Arguments:
+ detections (array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ correct (array[N, 10]), for 10 IoU levels
+ """
+ if masks:
+ if overlap:
+ nl = len(labels)
+ index = torch.arange(nl, device=gt_masks.device).view(nl, 1, 1) + 1
+ gt_masks = gt_masks.repeat(nl, 1, 1) # shape(1,640,640) -> (n,640,640)
+ gt_masks = torch.where(gt_masks == index, 1.0, 0.0)
+ if gt_masks.shape[1:] != pred_masks.shape[1:]:
+ gt_masks = F.interpolate(gt_masks[None], pred_masks.shape[1:], mode="bilinear", align_corners=False)[0]
+ gt_masks = gt_masks.gt_(0.5)
+ iou = mask_iou(gt_masks.view(gt_masks.shape[0], -1), pred_masks.view(pred_masks.shape[0], -1))
+ else: # boxes
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+
+ correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
+ correct_class = labels[:, 0:1] == detections[:, 5]
+ for i in range(len(iouv)):
+ x = torch.where((iou >= iouv[i]) & correct_class) # IoU > threshold and classes match
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detect, iou]
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ # matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ correct[matches[:, 1].astype(int), i] = True
+ return torch.tensor(correct, dtype=torch.bool, device=iouv.device)
+
+
+@smart_inference_mode()
+def run(
+ data,
+ weights=None, # model.pt path(s)
+ batch_size=32, # batch size
+ imgsz=640, # inference size (pixels)
+ conf_thres=0.001, # confidence threshold
+ iou_thres=0.6, # NMS IoU threshold
+ max_det=300, # maximum detections per image
+ task='val', # train, val, test, speed or study
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ workers=8, # max dataloader workers (per RANK in DDP mode)
+ single_cls=False, # treat as single-class dataset
+ augment=False, # augmented inference
+ verbose=False, # verbose output
+ save_txt=False, # save results to *.txt
+ save_hybrid=False, # save label+prediction hybrid results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_json=False, # save a COCO-JSON results file
+ project=ROOT / 'runs/val-seg', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=True, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ model=None,
+ dataloader=None,
+ save_dir=Path(''),
+ plots=True,
+ overlap=False,
+ mask_downsample_ratio=1,
+ compute_loss=None,
+ callbacks=Callbacks(),
+):
+ if save_json:
+ check_requirements(['pycocotools'])
+ process = process_mask_upsample # more accurate
+ else:
+ process = process_mask # faster
+
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ model.half() if half else model.float()
+ nm = de_parallel(model).model[-1].nm # number of masks
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ nm = de_parallel(model).model.model[-1].nm if isinstance(model, SegmentationModel) else 32 # number of masks
+ if engine:
+ batch_size = model.batch_size
+ else:
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
+
+ # Data
+ data = check_dataset(data) # check
+
+ # Configure
+ model.eval()
+ cuda = device.type != 'cpu'
+ is_coco = isinstance(data.get('val'), str) and data['val'].endswith(f'coco{os.sep}val2017.txt') # COCO dataset
+ nc = 1 if single_cls else int(data['nc']) # number of classes
+ iouv = torch.linspace(0.5, 0.95, 10, device=device) # iou vector for mAP@0.5:0.95
+ niou = iouv.numel()
+
+ # Dataloader
+ if not training:
+ if pt and not single_cls: # check --weights are trained on --data
+ ncm = model.model.nc
+ assert ncm == nc, f'{weights} ({ncm} classes) trained on different --data than what you passed ({nc} ' \
+ f'classes). Pass correct combination of --weights and --data that are trained together.'
+ model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
+ pad = 0.0 if task in ('speed', 'benchmark') else 0.5
+ rect = False if task == 'benchmark' else pt # square inference for benchmarks
+ task = task if task in ('train', 'val', 'test') else 'val' # path to train/val/test images
+ dataloader = create_dataloader(data[task],
+ imgsz,
+ batch_size,
+ stride,
+ single_cls,
+ pad=pad,
+ rect=rect,
+ workers=workers,
+ prefix=colorstr(f'{task}: '),
+ overlap_mask=overlap,
+ mask_downsample_ratio=mask_downsample_ratio)[0]
+
+ seen = 0
+ confusion_matrix = ConfusionMatrix(nc=nc)
+ names = model.names if hasattr(model, 'names') else model.module.names # get class names
+ if isinstance(names, (list, tuple)): # old format
+ names = dict(enumerate(names))
+ class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
+ s = ('%22s' + '%11s' * 10) % ('Class', 'Images', 'Instances', 'Box(P', "R", "mAP50", "mAP50-95)", "Mask(P", "R",
+ "mAP50", "mAP50-95)")
+ dt = Profile(), Profile(), Profile()
+ metrics = Metrics()
+ loss = torch.zeros(4, device=device)
+ jdict, stats = [], []
+ # callbacks.run('on_val_start')
+ pbar = tqdm(dataloader, desc=s, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ for batch_i, (im, targets, paths, shapes, masks) in enumerate(pbar):
+ # callbacks.run('on_val_batch_start')
+ with dt[0]:
+ if cuda:
+ im = im.to(device, non_blocking=True)
+ targets = targets.to(device)
+ masks = masks.to(device)
+ masks = masks.float()
+ im = im.half() if half else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ nb, _, height, width = im.shape # batch size, channels, height, width
+
+ # Inference
+ with dt[1]:
+ out, train_out = model(im) # if training else model(im, augment=augment, val=True) # inference, loss
+
+ # Loss
+ if compute_loss:
+ loss += compute_loss(train_out, targets, masks)[1] # box, obj, cls
+
+ # NMS
+ targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
+ lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
+ with dt[2]:
+ out = non_max_suppression(out,
+ conf_thres,
+ iou_thres,
+ labels=lb,
+ multi_label=True,
+ agnostic=single_cls,
+ max_det=max_det,
+ nm=nm)
+
+ # Metrics
+ plot_masks = [] # masks for plotting
+ for si, pred in enumerate(out):
+ labels = targets[targets[:, 0] == si, 1:]
+ nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
+ path, shape = Path(paths[si]), shapes[si][0]
+ correct_masks = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
+ correct_bboxes = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
+ seen += 1
+
+ if npr == 0:
+ if nl:
+ stats.append((correct_masks, correct_bboxes, *torch.zeros((2, 0), device=device), labels[:, 0]))
+ if plots:
+ confusion_matrix.process_batch(detections=None, labels=labels[:, 0])
+ continue
+
+ # Masks
+ midx = [si] if overlap else targets[:, 0] == si
+ gt_masks = masks[midx]
+ proto_out = train_out[1][si]
+ pred_masks = process(proto_out, pred[:, 6:], pred[:, :4], shape=im[si].shape[1:])
+
+ # Predictions
+ if single_cls:
+ pred[:, 5] = 0
+ predn = pred.clone()
+ scale_coords(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
+
+ # Evaluate
+ if nl:
+ tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
+ scale_coords(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
+ labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
+ correct_bboxes = process_batch(predn, labelsn, iouv)
+ correct_masks = process_batch(predn, labelsn, iouv, pred_masks, gt_masks, overlap=overlap, masks=True)
+ if plots:
+ confusion_matrix.process_batch(predn, labelsn)
+ stats.append((correct_masks, correct_bboxes, pred[:, 4], pred[:, 5], labels[:, 0])) # (conf, pcls, tcls)
+
+ pred_masks = torch.as_tensor(pred_masks, dtype=torch.uint8)
+ if plots and batch_i < 3:
+ plot_masks.append(pred_masks[:15].cpu()) # filter top 15 to plot
+
+ # Save/log
+ if save_txt:
+ save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / f'{path.stem}.txt')
+ if save_json:
+ pred_masks = scale_masks(im[si].shape[1:],
+ pred_masks.permute(1, 2, 0).contiguous().cpu().numpy(), shape, shapes[si][1])
+ save_one_json(predn, jdict, path, class_map, pred_masks) # append to COCO-JSON dictionary
+ # callbacks.run('on_val_image_end', pred, predn, path, names, im[si])
+
+ # Plot images
+ if plots and batch_i < 3:
+ if len(plot_masks):
+ plot_masks = torch.cat(plot_masks, dim=0)
+ plot_images_and_masks(im, targets, masks, paths, save_dir / f'val_batch{batch_i}_labels.jpg', names)
+ plot_images_and_masks(im, output_to_target(out, max_det=15), plot_masks, paths,
+ save_dir / f'val_batch{batch_i}_pred.jpg', names) # pred
+
+ # callbacks.run('on_val_batch_end')
+
+ # Compute metrics
+ stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
+ if len(stats) and stats[0].any():
+ results = ap_per_class_box_and_mask(*stats, plot=plots, save_dir=save_dir, names=names)
+ metrics.update(results)
+ nt = np.bincount(stats[4].astype(int), minlength=nc) # number of targets per class
+
+ # Print results
+ pf = '%22s' + '%11i' * 2 + '%11.3g' * 8 # print format
+ LOGGER.info(pf % ("all", seen, nt.sum(), *metrics.mean_results()))
+ if nt.sum() == 0:
+ LOGGER.warning(f'WARNING: no labels found in {task} set, can not compute metrics without labels ⚠️')
+
+ # Print results per class
+ if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
+ for i, c in enumerate(metrics.ap_class_index):
+ LOGGER.info(pf % (names[c], seen, nt[c], *metrics.class_result(i)))
+
+ # Print speeds
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
+ if not training:
+ shape = (batch_size, 3, imgsz, imgsz)
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}' % t)
+
+ # Plots
+ if plots:
+ confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
+ # callbacks.run('on_val_end')
+
+ mp_bbox, mr_bbox, map50_bbox, map_bbox, mp_mask, mr_mask, map50_mask, map_mask = metrics.mean_results()
+
+ # Save JSON
+ if save_json and len(jdict):
+ w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
+ anno_json = str(Path(data.get('path', '../coco')) / 'annotations/instances_val2017.json') # annotations json
+ pred_json = str(save_dir / f"{w}_predictions.json") # predictions json
+ LOGGER.info(f'\nEvaluating pycocotools mAP... saving {pred_json}...')
+ with open(pred_json, 'w') as f:
+ json.dump(jdict, f)
+
+ try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
+ from pycocotools.coco import COCO
+ from pycocotools.cocoeval import COCOeval
+
+ anno = COCO(anno_json) # init annotations api
+ pred = anno.loadRes(pred_json) # init predictions api
+ results = []
+ for eval in COCOeval(anno, pred, 'bbox'), COCOeval(anno, pred, 'segm'):
+ if is_coco:
+ eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.im_files] # img ID to evaluate
+ eval.evaluate()
+ eval.accumulate()
+ eval.summarize()
+ results.extend(eval.stats[:2]) # update results (mAP@0.5:0.95, mAP@0.5)
+ map_bbox, map50_bbox, map_mask, map50_mask = results
+ except Exception as e:
+ LOGGER.info(f'pycocotools unable to run: {e}')
+
+ # Return results
+ model.float() # for training
+ if not training:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ final_metric = mp_bbox, mr_bbox, map50_bbox, map_bbox, mp_mask, mr_mask, map50_mask, map_mask
+ return (*final_metric, *(loss.cpu() / len(dataloader)).tolist()), metrics.get_maps(nc), t
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128-seg.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s-seg.pt', help='model path(s)')
+ parser.add_argument('--batch-size', type=int, default=32, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=300, help='maximum detections per image')
+ parser.add_argument('--task', default='val', help='train, val, test, speed or study')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--verbose', action='store_true', help='report mAP by class')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-json', action='store_true', help='save a COCO-JSON results file')
+ parser.add_argument('--project', default=ROOT / 'runs/val-seg', help='save results to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.data = check_yaml(opt.data) # check YAML
+ # opt.save_json |= opt.data.endswith('coco.yaml')
+ opt.save_txt |= opt.save_hybrid
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ #check_requirements(requirements=ROOT / 'requirements.txt', exclude=('tensorboard', 'thop'))
+
+ if opt.task in ('train', 'val', 'test'): # run normally
+ if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
+ LOGGER.info(f'WARNING: confidence threshold {opt.conf_thres} > 0.001 produces invalid results ⚠️')
+ if opt.save_hybrid:
+ LOGGER.info('WARNING: --save-hybrid will return high mAP from hybrid labels, not from predictions alone ⚠️')
+ run(**vars(opt))
+
+ else:
+ weights = opt.weights if isinstance(opt.weights, list) else [opt.weights]
+ opt.half = True # FP16 for fastest results
+ if opt.task == 'speed': # speed benchmarks
+ # python val.py --task speed --data coco.yaml --batch 1 --weights yolov5n.pt yolov5s.pt...
+ opt.conf_thres, opt.iou_thres, opt.save_json = 0.25, 0.45, False
+ for opt.weights in weights:
+ run(**vars(opt), plots=False)
+
+ elif opt.task == 'study': # speed vs mAP benchmarks
+ # python val.py --task study --data coco.yaml --iou 0.7 --weights yolov5n.pt yolov5s.pt...
+ for opt.weights in weights:
+ f = f'study_{Path(opt.data).stem}_{Path(opt.weights).stem}.txt' # filename to save to
+ x, y = list(range(256, 1536 + 128, 128)), [] # x axis (image sizes), y axis
+ for opt.imgsz in x: # img-size
+ LOGGER.info(f'\nRunning {f} --imgsz {opt.imgsz}...')
+ r, _, t = run(**vars(opt), plots=False)
+ y.append(r + t) # results and times
+ np.savetxt(f, y, fmt='%10.4g') # save
+ os.system('zip -r study.zip study_*.txt')
+ plot_val_study(x=x) # plot
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/ipex/seg/setup.cfg b/ipex/seg/setup.cfg
new file mode 100644
index 000000000..020a75740
--- /dev/null
+++ b/ipex/seg/setup.cfg
@@ -0,0 +1,59 @@
+# Project-wide configuration file, can be used for package metadata and other toll configurations
+# Example usage: global configuration for PEP8 (via flake8) setting or default pytest arguments
+# Local usage: pip install pre-commit, pre-commit run --all-files
+
+[metadata]
+license_file = LICENSE
+description_file = README.md
+
+
+[tool:pytest]
+norecursedirs =
+ .git
+ dist
+ build
+addopts =
+ --doctest-modules
+ --durations=25
+ --color=yes
+
+
+[flake8]
+max-line-length = 120
+exclude = .tox,*.egg,build,temp
+select = E,W,F
+doctests = True
+verbose = 2
+# https://pep8.readthedocs.io/en/latest/intro.html#error-codes
+format = pylint
+# see: https://www.flake8rules.com/
+ignore =
+ E731 # Do not assign a lambda expression, use a def
+ F405 # name may be undefined, or defined from star imports: module
+ E402 # module level import not at top of file
+ F401 # module imported but unused
+ W504 # line break after binary operator
+ E127 # continuation line over-indented for visual indent
+ W504 # line break after binary operator
+ E231 # missing whitespace after ‘,’, ‘;’, or ‘:’
+ E501 # line too long
+ F403 # ‘from module import *’ used; unable to detect undefined names
+
+
+[isort]
+# https://pycqa.github.io/isort/docs/configuration/options.html
+line_length = 120
+# see: https://pycqa.github.io/isort/docs/configuration/multi_line_output_modes.html
+multi_line_output = 0
+
+
+[yapf]
+based_on_style = pep8
+spaces_before_comment = 2
+COLUMN_LIMIT = 120
+COALESCE_BRACKETS = True
+SPACES_AROUND_POWER_OPERATOR = True
+SPACE_BETWEEN_ENDING_COMMA_AND_CLOSING_BRACKET = False
+SPLIT_BEFORE_CLOSING_BRACKET = False
+SPLIT_BEFORE_FIRST_ARGUMENT = False
+# EACH_DICT_ENTRY_ON_SEPARATE_LINE = False
diff --git a/ipex/seg/train.py b/ipex/seg/train.py
new file mode 100644
index 000000000..34f83ce63
--- /dev/null
+++ b/ipex/seg/train.py
@@ -0,0 +1,630 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Train a YOLOv5 model on a custom dataset.
+Models and datasets download automatically from the latest YOLOv5 release.
+
+Usage - Single-GPU training:
+ $ python train.py --data coco128.yaml --weights yolov5s.pt --img 640 # from pretrained (recommended)
+ $ python train.py --data coco128.yaml --weights '' --cfg yolov5s.yaml --img 640 # from scratch
+
+Usage - Multi-GPU DDP training:
+ $ python -m torch.distributed.run --nproc_per_node 4 --master_port 1 train.py --data coco128.yaml --weights yolov5s.pt --img 640 --device 0,1,2,3
+
+Models: https://github.com/ultralytics/yolov5/tree/master/models
+Datasets: https://github.com/ultralytics/yolov5/tree/master/data
+Tutorial: https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data
+"""
+
+import argparse
+import math
+import os
+import random
+import sys
+import time
+from copy import deepcopy
+from datetime import datetime
+from pathlib import Path
+
+import numpy as np
+import torch
+import torch.distributed as dist
+import torch.nn as nn
+import yaml
+from torch.optim import lr_scheduler
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+import val as validate # for end-of-epoch mAP
+from models.experimental import attempt_load
+from models.yolo import Model
+from utils.autoanchor import check_anchors
+from utils.autobatch import check_train_batch_size
+from utils.callbacks import Callbacks
+from utils.dataloaders import create_dataloader
+from utils.downloads import attempt_download, is_url
+from utils.general import (LOGGER, check_amp, check_dataset, check_file, check_git_status, check_img_size,
+ check_requirements, check_suffix, check_yaml, colorstr, get_latest_run, increment_path,
+ init_seeds, intersect_dicts, labels_to_class_weights, labels_to_image_weights, methods,
+ one_cycle, print_args, print_mutation, strip_optimizer, yaml_save)
+from utils.loggers import Loggers
+from utils.loggers.wandb.wandb_utils import check_wandb_resume
+from utils.loss import ComputeLoss
+from utils.metrics import fitness
+from utils.plots import plot_evolve
+from utils.torch_utils import (EarlyStopping, ModelEMA, de_parallel, select_device, smart_DDP, smart_optimizer,
+ smart_resume, torch_distributed_zero_first)
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+
+def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictionary
+ save_dir, epochs, batch_size, weights, single_cls, evolve, data, cfg, resume, noval, nosave, workers, freeze = \
+ Path(opt.save_dir), opt.epochs, opt.batch_size, opt.weights, opt.single_cls, opt.evolve, opt.data, opt.cfg, \
+ opt.resume, opt.noval, opt.nosave, opt.workers, opt.freeze
+ callbacks.run('on_pretrain_routine_start')
+
+ # Directories
+ w = save_dir / 'weights' # weights dir
+ (w.parent if evolve else w).mkdir(parents=True, exist_ok=True) # make dir
+ last, best = w / 'last.pt', w / 'best.pt'
+
+ # Hyperparameters
+ if isinstance(hyp, str):
+ with open(hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ LOGGER.info(colorstr('hyperparameters: ') + ', '.join(f'{k}={v}' for k, v in hyp.items()))
+ opt.hyp = hyp.copy() # for saving hyps to checkpoints
+
+ # Save run settings
+ if not evolve:
+ yaml_save(save_dir / 'hyp.yaml', hyp)
+ yaml_save(save_dir / 'opt.yaml', vars(opt))
+
+ # Loggers
+ data_dict = None
+ if RANK in {-1, 0}:
+ loggers = Loggers(save_dir, weights, opt, hyp, LOGGER) # loggers instance
+ if loggers.clearml:
+ data_dict = loggers.clearml.data_dict # None if no ClearML dataset or filled in by ClearML
+ if loggers.wandb:
+ data_dict = loggers.wandb.data_dict
+ if resume:
+ weights, epochs, hyp, batch_size = opt.weights, opt.epochs, opt.hyp, opt.batch_size
+
+ # Register actions
+ for k in methods(loggers):
+ callbacks.register_action(k, callback=getattr(loggers, k))
+
+ # Config
+ plots = not evolve and not opt.noplots # create plots
+ cuda = device.type != 'cpu'
+ init_seeds(opt.seed + 1 + RANK, deterministic=True)
+ with torch_distributed_zero_first(LOCAL_RANK):
+ data_dict = data_dict or check_dataset(data) # check if None
+ train_path, val_path = data_dict['train'], data_dict['val']
+ nc = 1 if single_cls else int(data_dict['nc']) # number of classes
+ names = {0: 'item'} if single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
+ is_coco = isinstance(val_path, str) and val_path.endswith('coco/val2017.txt') # COCO dataset
+
+ # Model
+ check_suffix(weights, '.pt') # check weights
+ pretrained = weights.endswith('.pt')
+ if pretrained:
+ with torch_distributed_zero_first(LOCAL_RANK):
+ weights = attempt_download(weights) # download if not found locally
+ ckpt = torch.load(weights, map_location='cpu') # load checkpoint to CPU to avoid CUDA memory leak
+ model = Model(cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ exclude = ['anchor'] if (cfg or hyp.get('anchors')) and not resume else [] # exclude keys
+ csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
+ csd = intersect_dicts(csd, model.state_dict(), exclude=exclude) # intersect
+ model.load_state_dict(csd, strict=False) # load
+ LOGGER.info(f'Transferred {len(csd)}/{len(model.state_dict())} items from {weights}') # report
+ else:
+ model = Model(cfg, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ amp = check_amp(model) # check AMP
+
+ # Freeze
+ freeze = [f'model.{x}.' for x in (freeze if len(freeze) > 1 else range(freeze[0]))] # layers to freeze
+ for k, v in model.named_parameters():
+ v.requires_grad = True # train all layers
+ # v.register_hook(lambda x: torch.nan_to_num(x)) # NaN to 0 (commented for erratic training results)
+ if any(x in k for x in freeze):
+ LOGGER.info(f'freezing {k}')
+ v.requires_grad = False
+
+ # Image size
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ imgsz = check_img_size(opt.imgsz, gs, floor=gs * 2) # verify imgsz is gs-multiple
+
+ # Batch size
+ if RANK == -1 and batch_size == -1: # single-GPU only, estimate best batch size
+ batch_size = check_train_batch_size(model, imgsz, amp)
+ loggers.on_params_update({"batch_size": batch_size})
+
+ # Optimizer
+ nbs = 64 # nominal batch size
+ accumulate = max(round(nbs / batch_size), 1) # accumulate loss before optimizing
+ hyp['weight_decay'] *= batch_size * accumulate / nbs # scale weight_decay
+ optimizer = smart_optimizer(model, opt.optimizer, hyp['lr0'], hyp['momentum'], hyp['weight_decay'])
+
+ # Scheduler
+ if opt.cos_lr:
+ lf = one_cycle(1, hyp['lrf'], epochs) # cosine 1->hyp['lrf']
+ else:
+ lf = lambda x: (1 - x / epochs) * (1.0 - hyp['lrf']) + hyp['lrf'] # linear
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf) # plot_lr_scheduler(optimizer, scheduler, epochs)
+
+ # EMA
+ ema = ModelEMA(model) if RANK in {-1, 0} else None
+
+ # Resume
+ best_fitness, start_epoch = 0.0, 0
+ if pretrained:
+ if resume:
+ best_fitness, start_epoch, epochs = smart_resume(ckpt, optimizer, ema, weights, epochs, resume)
+ del ckpt, csd
+
+ # DP mode
+ if cuda and RANK == -1 and torch.cuda.device_count() > 1:
+ LOGGER.warning('WARNING: DP not recommended, use torch.distributed.run for best DDP Multi-GPU results.\n'
+ 'See Multi-GPU Tutorial at https://github.com/ultralytics/yolov5/issues/475 to get started.')
+ model = torch.nn.DataParallel(model)
+
+ # SyncBatchNorm
+ if opt.sync_bn and cuda and RANK != -1:
+ model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
+ LOGGER.info('Using SyncBatchNorm()')
+
+ # Trainloader
+ train_loader, dataset = create_dataloader(train_path,
+ imgsz,
+ batch_size // WORLD_SIZE,
+ gs,
+ single_cls,
+ hyp=hyp,
+ augment=True,
+ cache=None if opt.cache == 'val' else opt.cache,
+ rect=opt.rect,
+ rank=LOCAL_RANK,
+ workers=workers,
+ image_weights=opt.image_weights,
+ quad=opt.quad,
+ prefix=colorstr('train: '),
+ shuffle=True)
+ labels = np.concatenate(dataset.labels, 0)
+ mlc = int(labels[:, 0].max()) # max label class
+ assert mlc < nc, f'Label class {mlc} exceeds nc={nc} in {data}. Possible class labels are 0-{nc - 1}'
+
+ # Process 0
+ if RANK in {-1, 0}:
+ val_loader = create_dataloader(val_path,
+ imgsz,
+ batch_size // WORLD_SIZE * 2,
+ gs,
+ single_cls,
+ hyp=hyp,
+ cache=None if noval else opt.cache,
+ rect=True,
+ rank=-1,
+ workers=workers * 2,
+ pad=0.5,
+ prefix=colorstr('val: '))[0]
+
+ if not resume:
+ if not opt.noautoanchor:
+ check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz) # run AutoAnchor
+ model.half().float() # pre-reduce anchor precision
+
+ callbacks.run('on_pretrain_routine_end', labels, names)
+
+ # DDP mode
+ if cuda and RANK != -1:
+ model = smart_DDP(model)
+
+ # Model attributes
+ nl = de_parallel(model).model[-1].nl # number of detection layers (to scale hyps)
+ hyp['box'] *= 3 / nl # scale to layers
+ hyp['cls'] *= nc / 80 * 3 / nl # scale to classes and layers
+ hyp['obj'] *= (imgsz / 640) ** 2 * 3 / nl # scale to image size and layers
+ hyp['label_smoothing'] = opt.label_smoothing
+ model.nc = nc # attach number of classes to model
+ model.hyp = hyp # attach hyperparameters to model
+ model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
+ model.names = names
+
+ # Start training
+ t0 = time.time()
+ nb = len(train_loader) # number of batches
+ nw = max(round(hyp['warmup_epochs'] * nb), 100) # number of warmup iterations, max(3 epochs, 100 iterations)
+ # nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
+ last_opt_step = -1
+ maps = np.zeros(nc) # mAP per class
+ results = (0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
+ scheduler.last_epoch = start_epoch - 1 # do not move
+ scaler = torch.cuda.amp.GradScaler(enabled=amp)
+ stopper, stop = EarlyStopping(patience=opt.patience), False
+ compute_loss = ComputeLoss(model) # init loss class
+ callbacks.run('on_train_start')
+ LOGGER.info(f'Image sizes {imgsz} train, {imgsz} val\n'
+ f'Using {train_loader.num_workers * WORLD_SIZE} dataloader workers\n'
+ f"Logging results to {colorstr('bold', save_dir)}\n"
+ f'Starting training for {epochs} epochs...')
+ for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
+ callbacks.run('on_train_epoch_start')
+ model.train()
+
+ # Update image weights (optional, single-GPU only)
+ if opt.image_weights:
+ cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
+ iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
+ dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
+
+ # Update mosaic border (optional)
+ # b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
+ # dataset.mosaic_border = [b - imgsz, -b] # height, width borders
+
+ mloss = torch.zeros(3, device=device) # mean losses
+ if RANK != -1:
+ train_loader.sampler.set_epoch(epoch)
+ pbar = enumerate(train_loader)
+ LOGGER.info(('\n' + '%11s' * 7) % ('Epoch', 'GPU_mem', 'box_loss', 'obj_loss', 'cls_loss', 'Instances', 'Size'))
+ if RANK in {-1, 0}:
+ pbar = tqdm(pbar, total=nb, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ optimizer.zero_grad()
+ for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
+ callbacks.run('on_train_batch_start')
+ ni = i + nb * epoch # number integrated batches (since train start)
+ imgs = imgs.to(device, non_blocking=True).float() / 255 # uint8 to float32, 0-255 to 0.0-1.0
+
+ # Warmup
+ if ni <= nw:
+ xi = [0, nw] # x interp
+ # compute_loss.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
+ accumulate = max(1, np.interp(ni, xi, [1, nbs / batch_size]).round())
+ for j, x in enumerate(optimizer.param_groups):
+ # bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
+ x['lr'] = np.interp(ni, xi, [hyp['warmup_bias_lr'] if j == 0 else 0.0, x['initial_lr'] * lf(epoch)])
+ if 'momentum' in x:
+ x['momentum'] = np.interp(ni, xi, [hyp['warmup_momentum'], hyp['momentum']])
+
+ # Multi-scale
+ if opt.multi_scale:
+ sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
+ sf = sz / max(imgs.shape[2:]) # scale factor
+ if sf != 1:
+ ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
+ imgs = nn.functional.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)
+
+ # Forward
+ with torch.cuda.amp.autocast(amp):
+ pred = model(imgs) # forward
+ loss, loss_items = compute_loss(pred, targets.to(device)) # loss scaled by batch_size
+ if RANK != -1:
+ loss *= WORLD_SIZE # gradient averaged between devices in DDP mode
+ if opt.quad:
+ loss *= 4.
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize - https://pytorch.org/docs/master/notes/amp_examples.html
+ if ni - last_opt_step >= accumulate:
+ scaler.unscale_(optimizer) # unscale gradients
+ torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=10.0) # clip gradients
+ scaler.step(optimizer) # optimizer.step
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+ last_opt_step = ni
+
+ # Log
+ if RANK in {-1, 0}:
+ mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
+ mem = f'{torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0:.3g}G' # (GB)
+ pbar.set_description(('%11s' * 2 + '%11.4g' * 5) %
+ (f'{epoch}/{epochs - 1}', mem, *mloss, targets.shape[0], imgs.shape[-1]))
+ callbacks.run('on_train_batch_end', model, ni, imgs, targets, paths)
+ if callbacks.stop_training:
+ return
+ # end batch ------------------------------------------------------------------------------------------------
+
+ # Scheduler
+ lr = [x['lr'] for x in optimizer.param_groups] # for loggers
+ scheduler.step()
+
+ if RANK in {-1, 0}:
+ # mAP
+ callbacks.run('on_train_epoch_end', epoch=epoch)
+ ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'names', 'stride', 'class_weights'])
+ final_epoch = (epoch + 1 == epochs) or stopper.possible_stop
+ if not noval or final_epoch: # Calculate mAP
+ results, maps, _ = validate.run(data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ half=amp,
+ model=ema.ema,
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ plots=False,
+ callbacks=callbacks,
+ compute_loss=compute_loss)
+
+ # Update best mAP
+ fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
+ stop = stopper(epoch=epoch, fitness=fi) # early stop check
+ if fi > best_fitness:
+ best_fitness = fi
+ log_vals = list(mloss) + list(results) + lr
+ callbacks.run('on_fit_epoch_end', log_vals, epoch, best_fitness, fi)
+
+ # Save model
+ if (not nosave) or (final_epoch and not evolve): # if save
+ ckpt = {
+ 'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'model': deepcopy(de_parallel(model)).half(),
+ 'ema': deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': optimizer.state_dict(),
+ 'wandb_id': loggers.wandb.wandb_run.id if loggers.wandb else None,
+ 'opt': vars(opt),
+ 'date': datetime.now().isoformat()}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fi:
+ torch.save(ckpt, best)
+ if opt.save_period > 0 and epoch % opt.save_period == 0:
+ torch.save(ckpt, w / f'epoch{epoch}.pt')
+ del ckpt
+ callbacks.run('on_model_save', last, epoch, final_epoch, best_fitness, fi)
+
+ # EarlyStopping
+ if RANK != -1: # if DDP training
+ broadcast_list = [stop if RANK == 0 else None]
+ dist.broadcast_object_list(broadcast_list, 0) # broadcast 'stop' to all ranks
+ if RANK != 0:
+ stop = broadcast_list[0]
+ if stop:
+ break # must break all DDP ranks
+
+ # end epoch ----------------------------------------------------------------------------------------------------
+ # end training -----------------------------------------------------------------------------------------------------
+ if RANK in {-1, 0}:
+ LOGGER.info(f'\n{epoch - start_epoch + 1} epochs completed in {(time.time() - t0) / 3600:.3f} hours.')
+ for f in last, best:
+ if f.exists():
+ strip_optimizer(f) # strip optimizers
+ if f is best:
+ LOGGER.info(f'\nValidating {f}...')
+ results, _, _ = validate.run(
+ data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ model=attempt_load(f, device).half(),
+ iou_thres=0.65 if is_coco else 0.60, # best pycocotools at iou 0.65
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ save_json=is_coco,
+ verbose=True,
+ plots=plots,
+ callbacks=callbacks,
+ compute_loss=compute_loss) # val best model with plots
+ if is_coco:
+ callbacks.run('on_fit_epoch_end', list(mloss) + list(results) + lr, epoch, best_fitness, fi)
+
+ callbacks.run('on_train_end', last, best, epoch, results)
+
+ torch.cuda.empty_cache()
+ return results
+
+
+def parse_opt(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch-low.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300, help='total training epochs')
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--noval', action='store_true', help='only validate final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable AutoAnchor')
+ parser.add_argument('--noplots', action='store_true', help='save no plot files')
+ parser.add_argument('--evolve', type=int, nargs='?', const=300, help='evolve hyperparameters for x generations')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--optimizer', type=str, choices=['SGD', 'Adam', 'AdamW'], default='SGD', help='optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default=ROOT / 'runs/train', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--cos-lr', action='store_true', help='cosine LR scheduler')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--patience', type=int, default=100, help='EarlyStopping patience (epochs without improvement)')
+ parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone=10, first3=0 1 2')
+ parser.add_argument('--save-period', type=int, default=-1, help='Save checkpoint every x epochs (disabled if < 1)')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+
+ # Weights & Biases arguments
+ parser.add_argument('--entity', default=None, help='W&B: Entity')
+ parser.add_argument('--upload_dataset', nargs='?', const=True, default=False, help='W&B: Upload data, "val" option')
+ parser.add_argument('--bbox_interval', type=int, default=-1, help='W&B: Set bounding-box image logging interval')
+ parser.add_argument('--artifact_alias', type=str, default='latest', help='W&B: Version of dataset artifact to use')
+
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def main(opt, callbacks=Callbacks()):
+ # Checks
+ if RANK in {-1, 0}:
+ print_args(vars(opt))
+ #check_git_status()
+ #check_requirements()
+
+ # Resume
+ if opt.resume and not (check_wandb_resume(opt) or opt.evolve): # resume from specified or most recent last.pt
+ last = Path(check_file(opt.resume) if isinstance(opt.resume, str) else get_latest_run())
+ opt_yaml = last.parent.parent / 'opt.yaml' # train options yaml
+ opt_data = opt.data # original dataset
+ if opt_yaml.is_file():
+ with open(opt_yaml, errors='ignore') as f:
+ d = yaml.safe_load(f)
+ else:
+ d = torch.load(last, map_location='cpu')['opt']
+ opt = argparse.Namespace(**d) # replace
+ opt.cfg, opt.weights, opt.resume = '', str(last), True # reinstate
+ if is_url(opt_data):
+ opt.data = check_file(opt_data) # avoid HUB resume auth timeout
+ else:
+ opt.data, opt.cfg, opt.hyp, opt.weights, opt.project = \
+ check_file(opt.data), check_yaml(opt.cfg), check_yaml(opt.hyp), str(opt.weights), str(opt.project) # checks
+ assert len(opt.cfg) or len(opt.weights), 'either --cfg or --weights must be specified'
+ if opt.evolve:
+ if opt.project == str(ROOT / 'runs/train'): # if default project name, rename to runs/evolve
+ opt.project = str(ROOT / 'runs/evolve')
+ opt.exist_ok, opt.resume = opt.resume, False # pass resume to exist_ok and disable resume
+ if opt.name == 'cfg':
+ opt.name = Path(opt.cfg).stem # use model.yaml as name
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok))
+
+ # DDP mode
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if LOCAL_RANK != -1:
+ msg = 'is not compatible with YOLOv5 Multi-GPU DDP training'
+ assert not opt.image_weights, f'--image-weights {msg}'
+ assert not opt.evolve, f'--evolve {msg}'
+ assert opt.batch_size != -1, f'AutoBatch with --batch-size -1 {msg}, please pass a valid --batch-size'
+ assert opt.batch_size % WORLD_SIZE == 0, f'--batch-size {opt.batch_size} must be multiple of WORLD_SIZE'
+ assert torch.cuda.device_count() > LOCAL_RANK, 'insufficient CUDA devices for DDP command'
+ torch.cuda.set_device(LOCAL_RANK)
+ device = torch.device('cuda', LOCAL_RANK)
+ dist.init_process_group(backend="nccl" if dist.is_nccl_available() else "gloo")
+
+ # Train
+ if not opt.evolve:
+ train(opt.hyp, opt, device, callbacks)
+
+ # Evolve hyperparameters (optional)
+ else:
+ # Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)
+ meta = {
+ 'lr0': (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
+ 'lrf': (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
+ 'momentum': (0.3, 0.6, 0.98), # SGD momentum/Adam beta1
+ 'weight_decay': (1, 0.0, 0.001), # optimizer weight decay
+ 'warmup_epochs': (1, 0.0, 5.0), # warmup epochs (fractions ok)
+ 'warmup_momentum': (1, 0.0, 0.95), # warmup initial momentum
+ 'warmup_bias_lr': (1, 0.0, 0.2), # warmup initial bias lr
+ 'box': (1, 0.02, 0.2), # box loss gain
+ 'cls': (1, 0.2, 4.0), # cls loss gain
+ 'cls_pw': (1, 0.5, 2.0), # cls BCELoss positive_weight
+ 'obj': (1, 0.2, 4.0), # obj loss gain (scale with pixels)
+ 'obj_pw': (1, 0.5, 2.0), # obj BCELoss positive_weight
+ 'iou_t': (0, 0.1, 0.7), # IoU training threshold
+ 'anchor_t': (1, 2.0, 8.0), # anchor-multiple threshold
+ 'anchors': (2, 2.0, 10.0), # anchors per output grid (0 to ignore)
+ 'fl_gamma': (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
+ 'hsv_h': (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
+ 'hsv_s': (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
+ 'hsv_v': (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)
+ 'degrees': (1, 0.0, 45.0), # image rotation (+/- deg)
+ 'translate': (1, 0.0, 0.9), # image translation (+/- fraction)
+ 'scale': (1, 0.0, 0.9), # image scale (+/- gain)
+ 'shear': (1, 0.0, 10.0), # image shear (+/- deg)
+ 'perspective': (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
+ 'flipud': (1, 0.0, 1.0), # image flip up-down (probability)
+ 'fliplr': (0, 0.0, 1.0), # image flip left-right (probability)
+ 'mosaic': (1, 0.0, 1.0), # image mixup (probability)
+ 'mixup': (1, 0.0, 1.0), # image mixup (probability)
+ 'copy_paste': (1, 0.0, 1.0)} # segment copy-paste (probability)
+
+ with open(opt.hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ if 'anchors' not in hyp: # anchors commented in hyp.yaml
+ hyp['anchors'] = 3
+ if opt.noautoanchor:
+ del hyp['anchors'], meta['anchors']
+ opt.noval, opt.nosave, save_dir = True, True, Path(opt.save_dir) # only val/save final epoch
+ # ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
+ evolve_yaml, evolve_csv = save_dir / 'hyp_evolve.yaml', save_dir / 'evolve.csv'
+ if opt.bucket:
+ os.system(f'gsutil cp gs://{opt.bucket}/evolve.csv {evolve_csv}') # download evolve.csv if exists
+
+ for _ in range(opt.evolve): # generations to evolve
+ if evolve_csv.exists(): # if evolve.csv exists: select best hyps and mutate
+ # Select parent(s)
+ parent = 'single' # parent selection method: 'single' or 'weighted'
+ x = np.loadtxt(evolve_csv, ndmin=2, delimiter=',', skiprows=1)
+ n = min(5, len(x)) # number of previous results to consider
+ x = x[np.argsort(-fitness(x))][:n] # top n mutations
+ w = fitness(x) - fitness(x).min() + 1E-6 # weights (sum > 0)
+ if parent == 'single' or len(x) == 1:
+ # x = x[random.randint(0, n - 1)] # random selection
+ x = x[random.choices(range(n), weights=w)[0]] # weighted selection
+ elif parent == 'weighted':
+ x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
+
+ # Mutate
+ mp, s = 0.8, 0.2 # mutation probability, sigma
+ npr = np.random
+ npr.seed(int(time.time()))
+ g = np.array([meta[k][0] for k in hyp.keys()]) # gains 0-1
+ ng = len(meta)
+ v = np.ones(ng)
+ while all(v == 1): # mutate until a change occurs (prevent duplicates)
+ v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
+ for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
+ hyp[k] = float(x[i + 7] * v[i]) # mutate
+
+ # Constrain to limits
+ for k, v in meta.items():
+ hyp[k] = max(hyp[k], v[1]) # lower limit
+ hyp[k] = min(hyp[k], v[2]) # upper limit
+ hyp[k] = round(hyp[k], 5) # significant digits
+
+ # Train mutation
+ results = train(hyp.copy(), opt, device, callbacks)
+ callbacks = Callbacks()
+ # Write mutation results
+ print_mutation(results, hyp.copy(), save_dir, opt.bucket)
+
+ # Plot results
+ plot_evolve(evolve_csv)
+ LOGGER.info(f'Hyperparameter evolution finished {opt.evolve} generations\n'
+ f"Results saved to {colorstr('bold', save_dir)}\n"
+ f'Usage example: $ python train.py --hyp {evolve_yaml}')
+
+
+def run(**kwargs):
+ # Usage: import train; train.run(data='coco128.yaml', imgsz=320, weights='yolov5m.pt')
+ opt = parse_opt(True)
+ for k, v in kwargs.items():
+ setattr(opt, k, v)
+ main(opt)
+ return opt
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/ipex/seg/utils/__init__.py b/ipex/seg/utils/__init__.py
new file mode 100644
index 000000000..3ea4139d8
--- /dev/null
+++ b/ipex/seg/utils/__init__.py
@@ -0,0 +1,63 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+utils/initialization
+"""
+
+import contextlib
+import threading
+
+
+class TryExcept(contextlib.ContextDecorator):
+ # YOLOv5 TryExcept class. Usage: @TryExcept() decorator or 'with TryExcept():' context manager
+ def __init__(self, msg='default message here'):
+ self.msg = msg
+
+ def __enter__(self):
+ pass
+
+ def __exit__(self, exc_type, value, traceback):
+ if value:
+ print(f'{self.msg}: {value}')
+ return True
+
+
+def threaded(func):
+ # Multi-threads a target function and returns thread. Usage: @threaded decorator
+ def wrapper(*args, **kwargs):
+ thread = threading.Thread(target=func, args=args, kwargs=kwargs, daemon=True)
+ thread.start()
+ return thread
+
+ return wrapper
+
+
+def notebook_init(verbose=True):
+ # Check system software and hardware
+ print('Checking setup...')
+
+ import os
+ import shutil
+
+ from utils.general import check_requirements, emojis, is_colab
+ from utils.torch_utils import select_device # imports
+
+ check_requirements(('psutil', 'IPython'))
+ import psutil
+ from IPython import display # to display images and clear console output
+
+ if is_colab():
+ shutil.rmtree('/content/sample_data', ignore_errors=True) # remove colab /sample_data directory
+
+ # System info
+ if verbose:
+ gb = 1 << 30 # bytes to GiB (1024 ** 3)
+ ram = psutil.virtual_memory().total
+ total, used, free = shutil.disk_usage("/")
+ display.clear_output()
+ s = f'({os.cpu_count()} CPUs, {ram / gb:.1f} GB RAM, {(total - free) / gb:.1f}/{total / gb:.1f} GB disk)'
+ else:
+ s = ''
+
+ select_device(newline=False)
+ print(emojis(f'Setup complete ✅ {s}'))
+ return display
diff --git a/ipex/seg/utils/activations.py b/ipex/seg/utils/activations.py
new file mode 100644
index 000000000..084ce8c41
--- /dev/null
+++ b/ipex/seg/utils/activations.py
@@ -0,0 +1,103 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Activation functions
+"""
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+
+class SiLU(nn.Module):
+ # SiLU activation https://arxiv.org/pdf/1606.08415.pdf
+ @staticmethod
+ def forward(x):
+ return x * torch.sigmoid(x)
+
+
+class Hardswish(nn.Module):
+ # Hard-SiLU activation
+ @staticmethod
+ def forward(x):
+ # return x * F.hardsigmoid(x) # for TorchScript and CoreML
+ return x * F.hardtanh(x + 3, 0.0, 6.0) / 6.0 # for TorchScript, CoreML and ONNX
+
+
+class Mish(nn.Module):
+ # Mish activation https://github.com/digantamisra98/Mish
+ @staticmethod
+ def forward(x):
+ return x * F.softplus(x).tanh()
+
+
+class MemoryEfficientMish(nn.Module):
+ # Mish activation memory-efficient
+ class F(torch.autograd.Function):
+
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ fx = F.softplus(x).tanh()
+ return grad_output * (fx + x * sx * (1 - fx * fx))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+class FReLU(nn.Module):
+ # FReLU activation https://arxiv.org/abs/2007.11824
+ def __init__(self, c1, k=3): # ch_in, kernel
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
+ self.bn = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ return torch.max(x, self.bn(self.conv(x)))
+
+
+class AconC(nn.Module):
+ r""" ACON activation (activate or not)
+ AconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is a learnable parameter
+ according to "Activate or Not: Learning Customized Activation" .
+ """
+
+ def __init__(self, c1):
+ super().__init__()
+ self.p1 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.p2 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.beta = nn.Parameter(torch.ones(1, c1, 1, 1))
+
+ def forward(self, x):
+ dpx = (self.p1 - self.p2) * x
+ return dpx * torch.sigmoid(self.beta * dpx) + self.p2 * x
+
+
+class MetaAconC(nn.Module):
+ r""" ACON activation (activate or not)
+ MetaAconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is generated by a small network
+ according to "Activate or Not: Learning Customized Activation" .
+ """
+
+ def __init__(self, c1, k=1, s=1, r=16): # ch_in, kernel, stride, r
+ super().__init__()
+ c2 = max(r, c1 // r)
+ self.p1 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.p2 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.fc1 = nn.Conv2d(c1, c2, k, s, bias=True)
+ self.fc2 = nn.Conv2d(c2, c1, k, s, bias=True)
+ # self.bn1 = nn.BatchNorm2d(c2)
+ # self.bn2 = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ y = x.mean(dim=2, keepdims=True).mean(dim=3, keepdims=True)
+ # batch-size 1 bug/instabilities https://github.com/ultralytics/yolov5/issues/2891
+ # beta = torch.sigmoid(self.bn2(self.fc2(self.bn1(self.fc1(y))))) # bug/unstable
+ beta = torch.sigmoid(self.fc2(self.fc1(y))) # bug patch BN layers removed
+ dpx = (self.p1 - self.p2) * x
+ return dpx * torch.sigmoid(beta * dpx) + self.p2 * x
diff --git a/ipex/seg/utils/augmentations.py b/ipex/seg/utils/augmentations.py
new file mode 100644
index 000000000..c8499b3fc
--- /dev/null
+++ b/ipex/seg/utils/augmentations.py
@@ -0,0 +1,348 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Image augmentation functions
+"""
+
+import math
+import random
+
+import cv2
+import numpy as np
+import torchvision.transforms as T
+import torchvision.transforms.functional as TF
+
+from utils.general import LOGGER, check_version, colorstr, resample_segments, segment2box
+from utils.metrics import bbox_ioa
+
+IMAGENET_MEAN = 0.485, 0.456, 0.406 # RGB mean
+IMAGENET_STD = 0.229, 0.224, 0.225 # RGB standard deviation
+
+
+class Albumentations:
+ # YOLOv5 Albumentations class (optional, only used if package is installed)
+ def __init__(self):
+ self.transform = None
+ prefix = colorstr('albumentations: ')
+ try:
+ import albumentations as A
+ check_version(A.__version__, '1.0.3', hard=True) # version requirement
+
+ T = [
+ A.Blur(p=0.01),
+ A.MedianBlur(p=0.01),
+ A.ToGray(p=0.01),
+ A.CLAHE(p=0.01),
+ A.RandomBrightnessContrast(p=0.0),
+ A.RandomGamma(p=0.0),
+ A.ImageCompression(quality_lower=75, p=0.0)] # transforms
+ self.transform = A.Compose(T, bbox_params=A.BboxParams(format='yolo', label_fields=['class_labels']))
+
+ LOGGER.info(prefix + ', '.join(f'{x}'.replace('always_apply=False, ', '') for x in T if x.p))
+ except ImportError: # package not installed, skip
+ pass
+ except Exception as e:
+ LOGGER.info(f'{prefix}{e}')
+
+ def __call__(self, im, labels, p=1.0):
+ if self.transform and random.random() < p:
+ new = self.transform(image=im, bboxes=labels[:, 1:], class_labels=labels[:, 0]) # transformed
+ im, labels = new['image'], np.array([[c, *b] for c, b in zip(new['class_labels'], new['bboxes'])])
+ return im, labels
+
+
+def normalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD, inplace=False):
+ # Denormalize RGB images x per ImageNet stats in BCHW format, i.e. = (x - mean) / std
+ return TF.normalize(x, mean, std, inplace=inplace)
+
+
+def denormalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD):
+ # Denormalize RGB images x per ImageNet stats in BCHW format, i.e. = x * std + mean
+ for i in range(3):
+ x[:, i] = x[:, i] * std[i] + mean[i]
+ return x
+
+
+def augment_hsv(im, hgain=0.5, sgain=0.5, vgain=0.5):
+ # HSV color-space augmentation
+ if hgain or sgain or vgain:
+ r = np.random.uniform(-1, 1, 3) * [hgain, sgain, vgain] + 1 # random gains
+ hue, sat, val = cv2.split(cv2.cvtColor(im, cv2.COLOR_BGR2HSV))
+ dtype = im.dtype # uint8
+
+ x = np.arange(0, 256, dtype=r.dtype)
+ lut_hue = ((x * r[0]) % 180).astype(dtype)
+ lut_sat = np.clip(x * r[1], 0, 255).astype(dtype)
+ lut_val = np.clip(x * r[2], 0, 255).astype(dtype)
+
+ im_hsv = cv2.merge((cv2.LUT(hue, lut_hue), cv2.LUT(sat, lut_sat), cv2.LUT(val, lut_val)))
+ cv2.cvtColor(im_hsv, cv2.COLOR_HSV2BGR, dst=im) # no return needed
+
+
+def hist_equalize(im, clahe=True, bgr=False):
+ # Equalize histogram on BGR image 'im' with im.shape(n,m,3) and range 0-255
+ yuv = cv2.cvtColor(im, cv2.COLOR_BGR2YUV if bgr else cv2.COLOR_RGB2YUV)
+ if clahe:
+ c = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
+ yuv[:, :, 0] = c.apply(yuv[:, :, 0])
+ else:
+ yuv[:, :, 0] = cv2.equalizeHist(yuv[:, :, 0]) # equalize Y channel histogram
+ return cv2.cvtColor(yuv, cv2.COLOR_YUV2BGR if bgr else cv2.COLOR_YUV2RGB) # convert YUV image to RGB
+
+
+def replicate(im, labels):
+ # Replicate labels
+ h, w = im.shape[:2]
+ boxes = labels[:, 1:].astype(int)
+ x1, y1, x2, y2 = boxes.T
+ s = ((x2 - x1) + (y2 - y1)) / 2 # side length (pixels)
+ for i in s.argsort()[:round(s.size * 0.5)]: # smallest indices
+ x1b, y1b, x2b, y2b = boxes[i]
+ bh, bw = y2b - y1b, x2b - x1b
+ yc, xc = int(random.uniform(0, h - bh)), int(random.uniform(0, w - bw)) # offset x, y
+ x1a, y1a, x2a, y2a = [xc, yc, xc + bw, yc + bh]
+ im[y1a:y2a, x1a:x2a] = im[y1b:y2b, x1b:x2b] # im4[ymin:ymax, xmin:xmax]
+ labels = np.append(labels, [[labels[i, 0], x1a, y1a, x2a, y2a]], axis=0)
+
+ return im, labels
+
+
+def letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
+ # Resize and pad image while meeting stride-multiple constraints
+ shape = im.shape[:2] # current shape [height, width]
+ if isinstance(new_shape, int):
+ new_shape = (new_shape, new_shape)
+
+ # Scale ratio (new / old)
+ r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
+ if not scaleup: # only scale down, do not scale up (for better val mAP)
+ r = min(r, 1.0)
+
+ # Compute padding
+ ratio = r, r # width, height ratios
+ new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
+ dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
+ if auto: # minimum rectangle
+ dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
+ elif scaleFill: # stretch
+ dw, dh = 0.0, 0.0
+ new_unpad = (new_shape[1], new_shape[0])
+ ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
+
+ dw /= 2 # divide padding into 2 sides
+ dh /= 2
+
+ if shape[::-1] != new_unpad: # resize
+ im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
+ top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
+ left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
+ im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
+ return im, ratio, (dw, dh)
+
+
+def random_perspective(im,
+ targets=(),
+ segments=(),
+ degrees=10,
+ translate=.1,
+ scale=.1,
+ shear=10,
+ perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(0.1, 0.1), scale=(0.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = im.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = im.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
+ T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(im[:, :, ::-1]) # base
+ # ax[1].imshow(im2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ if n:
+ use_segments = any(x.any() for x in segments)
+ new = np.zeros((n, 4))
+ if use_segments: # warp segments
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+
+ else: # warp boxes
+ xy = np.ones((n * 4, 3))
+ xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
+
+ # create new boxes
+ x = xy[:, [0, 2, 4, 6]]
+ y = xy[:, [1, 3, 5, 7]]
+ new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
+
+ # clip
+ new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
+ new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+
+ return im, targets
+
+
+def copy_paste(im, labels, segments, p=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ if p and n:
+ h, w, c = im.shape # height, width, channels
+ im_new = np.zeros(im.shape, np.uint8)
+ for j in random.sample(range(n), k=round(p * n)):
+ l, s = labels[j], segments[j]
+ box = w - l[3], l[2], w - l[1], l[4]
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
+ labels = np.concatenate((labels, [[l[0], *box]]), 0)
+ segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=im, src2=im_new)
+ result = cv2.flip(result, 1) # augment segments (flip left-right)
+ i = result > 0 # pixels to replace
+ # i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
+ im[i] = result[i] # cv2.imwrite('debug.jpg', im) # debug
+
+ return im, labels, segments
+
+
+def cutout(im, labels, p=0.5):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ if random.random() < p:
+ h, w = im.shape[:2]
+ scales = [0.5] * 1 + [0.25] * 2 + [0.125] * 4 + [0.0625] * 8 + [0.03125] * 16 # image size fraction
+ for s in scales:
+ mask_h = random.randint(1, int(h * s)) # create random masks
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ # apply random color mask
+ im[ymin:ymax, xmin:xmax] = [random.randint(64, 191) for _ in range(3)]
+
+ # return unobscured labels
+ if len(labels) and s > 0.03:
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ labels = labels[ioa < 0.60] # remove >60% obscured labels
+
+ return labels
+
+
+def mixup(im, labels, im2, labels2):
+ # Applies MixUp augmentation https://arxiv.org/pdf/1710.09412.pdf
+ r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
+ im = (im * r + im2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+ return im, labels
+
+
+def box_candidates(box1, box2, wh_thr=2, ar_thr=100, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
+ # Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
+ w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
+ w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
+ ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
+ return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
+
+
+def classify_albumentations(augment=True,
+ size=224,
+ scale=(0.08, 1.0),
+ hflip=0.5,
+ vflip=0.0,
+ jitter=0.4,
+ mean=IMAGENET_MEAN,
+ std=IMAGENET_STD,
+ auto_aug=False):
+ # YOLOv5 classification Albumentations (optional, only used if package is installed)
+ prefix = colorstr('albumentations: ')
+ try:
+ import albumentations as A
+ from albumentations.pytorch import ToTensorV2
+ check_version(A.__version__, '1.0.3', hard=True) # version requirement
+ if augment: # Resize and crop
+ T = [A.RandomResizedCrop(height=size, width=size, scale=scale)]
+ if auto_aug:
+ # TODO: implement AugMix, AutoAug & RandAug in albumentation
+ LOGGER.info(f'{prefix}auto augmentations are currently not supported')
+ else:
+ if hflip > 0:
+ T += [A.HorizontalFlip(p=hflip)]
+ if vflip > 0:
+ T += [A.VerticalFlip(p=vflip)]
+ if jitter > 0:
+ color_jitter = (float(jitter),) * 3 # repeat value for brightness, contrast, satuaration, 0 hue
+ T += [A.ColorJitter(*color_jitter, 0)]
+ else: # Use fixed crop for eval set (reproducibility)
+ T = [A.SmallestMaxSize(max_size=size), A.CenterCrop(height=size, width=size)]
+ T += [A.Normalize(mean=mean, std=std), ToTensorV2()] # Normalize and convert to Tensor
+ LOGGER.info(prefix + ', '.join(f'{x}'.replace('always_apply=False, ', '') for x in T if x.p))
+ return A.Compose(T)
+
+ except ImportError: # package not installed, skip
+ pass
+ except Exception as e:
+ LOGGER.info(f'{prefix}{e}')
+
+
+def classify_transforms(size=224):
+ # Transforms to apply if albumentations not installed
+ assert isinstance(size, int), f'ERROR: classify_transforms size {size} must be integer, not (list, tuple)'
+ return T.Compose([T.ToTensor(), T.Resize(size), T.CenterCrop(size), T.Normalize(IMAGENET_MEAN, IMAGENET_STD)])
diff --git a/ipex/seg/utils/autoanchor.py b/ipex/seg/utils/autoanchor.py
new file mode 100644
index 000000000..f2222203e
--- /dev/null
+++ b/ipex/seg/utils/autoanchor.py
@@ -0,0 +1,170 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+AutoAnchor utils
+"""
+
+import random
+
+import numpy as np
+import torch
+import yaml
+from tqdm import tqdm
+
+from utils.general import LOGGER, colorstr
+
+PREFIX = colorstr('AutoAnchor: ')
+
+
+def check_anchor_order(m):
+ # Check anchor order against stride order for YOLOv5 Detect() module m, and correct if necessary
+ a = m.anchors.prod(-1).mean(-1).view(-1) # mean anchor area per output layer
+ da = a[-1] - a[0] # delta a
+ ds = m.stride[-1] - m.stride[0] # delta s
+ if da and (da.sign() != ds.sign()): # same order
+ LOGGER.info(f'{PREFIX}Reversing anchor order')
+ m.anchors[:] = m.anchors.flip(0)
+
+
+def check_anchors(dataset, model, thr=4.0, imgsz=640):
+ # Check anchor fit to data, recompute if necessary
+ m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
+ shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
+ wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
+
+ def metric(k): # compute metric
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1 / r).min(2)[0] # ratio metric
+ best = x.max(1)[0] # best_x
+ aat = (x > 1 / thr).float().sum(1).mean() # anchors above threshold
+ bpr = (best > 1 / thr).float().mean() # best possible recall
+ return bpr, aat
+
+ stride = m.stride.to(m.anchors.device).view(-1, 1, 1) # model strides
+ anchors = m.anchors.clone() * stride # current anchors
+ bpr, aat = metric(anchors.cpu().view(-1, 2))
+ s = f'\n{PREFIX}{aat:.2f} anchors/target, {bpr:.3f} Best Possible Recall (BPR). '
+ if bpr > 0.98: # threshold to recompute
+ LOGGER.info(f'{s}Current anchors are a good fit to dataset ✅')
+ else:
+ LOGGER.info(f'{s}Anchors are a poor fit to dataset ⚠️, attempting to improve...')
+ na = m.anchors.numel() // 2 # number of anchors
+ try:
+ anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
+ except Exception as e:
+ LOGGER.info(f'{PREFIX}ERROR: {e}')
+ new_bpr = metric(anchors)[0]
+ if new_bpr > bpr: # replace anchors
+ anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
+ m.anchors[:] = anchors.clone().view_as(m.anchors)
+ check_anchor_order(m) # must be in pixel-space (not grid-space)
+ m.anchors /= stride
+ s = f'{PREFIX}Done ✅ (optional: update model *.yaml to use these anchors in the future)'
+ else:
+ s = f'{PREFIX}Done ⚠️ (original anchors better than new anchors, proceeding with original anchors)'
+ LOGGER.info(s)
+
+
+def kmean_anchors(dataset='./data/coco128.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
+ """ Creates kmeans-evolved anchors from training dataset
+
+ Arguments:
+ dataset: path to data.yaml, or a loaded dataset
+ n: number of anchors
+ img_size: image size used for training
+ thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
+ gen: generations to evolve anchors using genetic algorithm
+ verbose: print all results
+
+ Return:
+ k: kmeans evolved anchors
+
+ Usage:
+ from utils.autoanchor import *; _ = kmean_anchors()
+ """
+ from scipy.cluster.vq import kmeans
+
+ npr = np.random
+ thr = 1 / thr
+
+ def metric(k, wh): # compute metrics
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1 / r).min(2)[0] # ratio metric
+ # x = wh_iou(wh, torch.tensor(k)) # iou metric
+ return x, x.max(1)[0] # x, best_x
+
+ def anchor_fitness(k): # mutation fitness
+ _, best = metric(torch.tensor(k, dtype=torch.float32), wh)
+ return (best * (best > thr).float()).mean() # fitness
+
+ def print_results(k, verbose=True):
+ k = k[np.argsort(k.prod(1))] # sort small to large
+ x, best = metric(k, wh0)
+ bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
+ s = f'{PREFIX}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr\n' \
+ f'{PREFIX}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, ' \
+ f'past_thr={x[x > thr].mean():.3f}-mean: '
+ for x in k:
+ s += '%i,%i, ' % (round(x[0]), round(x[1]))
+ if verbose:
+ LOGGER.info(s[:-2])
+ return k
+
+ if isinstance(dataset, str): # *.yaml file
+ with open(dataset, errors='ignore') as f:
+ data_dict = yaml.safe_load(f) # model dict
+ from utils.dataloaders import LoadImagesAndLabels
+ dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
+
+ # Get label wh
+ shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
+
+ # Filter
+ i = (wh0 < 3.0).any(1).sum()
+ if i:
+ LOGGER.info(f'{PREFIX}WARNING: Extremely small objects found: {i} of {len(wh0)} labels are < 3 pixels in size')
+ wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ # wh = wh * (npr.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
+
+ # Kmeans init
+ try:
+ LOGGER.info(f'{PREFIX}Running kmeans for {n} anchors on {len(wh)} points...')
+ assert n <= len(wh) # apply overdetermined constraint
+ s = wh.std(0) # sigmas for whitening
+ k = kmeans(wh / s, n, iter=30)[0] * s # points
+ assert n == len(k) # kmeans may return fewer points than requested if wh is insufficient or too similar
+ except Exception:
+ LOGGER.warning(f'{PREFIX}WARNING: switching strategies from kmeans to random init')
+ k = np.sort(npr.rand(n * 2)).reshape(n, 2) * img_size # random init
+ wh, wh0 = (torch.tensor(x, dtype=torch.float32) for x in (wh, wh0))
+ k = print_results(k, verbose=False)
+
+ # Plot
+ # k, d = [None] * 20, [None] * 20
+ # for i in tqdm(range(1, 21)):
+ # k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
+ # ax = ax.ravel()
+ # ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
+ # ax[0].hist(wh[wh[:, 0]<100, 0],400)
+ # ax[1].hist(wh[wh[:, 1]<100, 1],400)
+ # fig.savefig('wh.png', dpi=200)
+
+ # Evolve
+ f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
+ pbar = tqdm(range(gen), bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ for _ in pbar:
+ v = np.ones(sh)
+ while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
+ v = ((npr.random(sh) < mp) * random.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
+ kg = (k.copy() * v).clip(min=2.0)
+ fg = anchor_fitness(kg)
+ if fg > f:
+ f, k = fg, kg.copy()
+ pbar.desc = f'{PREFIX}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
+ if verbose:
+ print_results(k, verbose)
+
+ return print_results(k)
diff --git a/ipex/seg/utils/autobatch.py b/ipex/seg/utils/autobatch.py
new file mode 100644
index 000000000..8d12e46f0
--- /dev/null
+++ b/ipex/seg/utils/autobatch.py
@@ -0,0 +1,69 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Auto-batch utils
+"""
+
+from copy import deepcopy
+
+import numpy as np
+import torch
+
+from utils.general import LOGGER, colorstr
+from utils.torch_utils import profile
+
+
+def check_train_batch_size(model, imgsz=640, amp=True):
+ # Check YOLOv5 training batch size
+ with torch.cuda.amp.autocast(amp):
+ return autobatch(deepcopy(model).train(), imgsz) # compute optimal batch size
+
+
+def autobatch(model, imgsz=640, fraction=0.9, batch_size=16):
+ # Automatically estimate best batch size to use `fraction` of available CUDA memory
+ # Usage:
+ # import torch
+ # from utils.autobatch import autobatch
+ # model = torch.hub.load('ultralytics/yolov5', 'yolov5s', autoshape=False)
+ # print(autobatch(model))
+
+ # Check device
+ prefix = colorstr('AutoBatch: ')
+ LOGGER.info(f'{prefix}Computing optimal batch size for --imgsz {imgsz}')
+ device = next(model.parameters()).device # get model device
+ if device.type == 'cpu':
+ LOGGER.info(f'{prefix}CUDA not detected, using default CPU batch-size {batch_size}')
+ return batch_size
+
+ # Inspect CUDA memory
+ gb = 1 << 30 # bytes to GiB (1024 ** 3)
+ d = str(device).upper() # 'CUDA:0'
+ properties = torch.cuda.get_device_properties(device) # device properties
+ t = properties.total_memory / gb # GiB total
+ r = torch.cuda.memory_reserved(device) / gb # GiB reserved
+ a = torch.cuda.memory_allocated(device) / gb # GiB allocated
+ f = t - (r + a) # GiB free
+ LOGGER.info(f'{prefix}{d} ({properties.name}) {t:.2f}G total, {r:.2f}G reserved, {a:.2f}G allocated, {f:.2f}G free')
+
+ # Profile batch sizes
+ batch_sizes = [1, 2, 4, 8, 16]
+ try:
+ img = [torch.empty(b, 3, imgsz, imgsz) for b in batch_sizes]
+ results = profile(img, model, n=3, device=device)
+ except Exception as e:
+ LOGGER.warning(f'{prefix}{e}')
+
+ # Fit a solution
+ y = [x[2] for x in results if x] # memory [2]
+ p = np.polyfit(batch_sizes[:len(y)], y, deg=1) # first degree polynomial fit
+ b = int((f * fraction - p[1]) / p[0]) # y intercept (optimal batch size)
+ if None in results: # some sizes failed
+ i = results.index(None) # first fail index
+ if b >= batch_sizes[i]: # y intercept above failure point
+ b = batch_sizes[max(i - 1, 0)] # select prior safe point
+ if b < 1: # zero or negative batch size
+ b = 16
+ LOGGER.warning(f'{prefix}WARNING: ⚠️ CUDA anomaly detected, recommend restart environment and retry command.')
+
+ fraction = np.polyval(p, b) / t # actual fraction predicted
+ LOGGER.info(f'{prefix}Using batch-size {b} for {d} {t * fraction:.2f}G/{t:.2f}G ({fraction * 100:.0f}%) ✅')
+ return b
diff --git a/ipex/seg/utils/aws/__init__.py b/ipex/seg/utils/aws/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/ipex/seg/utils/aws/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/ipex/seg/utils/aws/mime.sh b/ipex/seg/utils/aws/mime.sh
new file mode 100644
index 000000000..c319a83cf
--- /dev/null
+++ b/ipex/seg/utils/aws/mime.sh
@@ -0,0 +1,26 @@
+# AWS EC2 instance startup 'MIME' script https://aws.amazon.com/premiumsupport/knowledge-center/execute-user-data-ec2/
+# This script will run on every instance restart, not only on first start
+# --- DO NOT COPY ABOVE COMMENTS WHEN PASTING INTO USERDATA ---
+
+Content-Type: multipart/mixed; boundary="//"
+MIME-Version: 1.0
+
+--//
+Content-Type: text/cloud-config; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="cloud-config.txt"
+
+#cloud-config
+cloud_final_modules:
+- [scripts-user, always]
+
+--//
+Content-Type: text/x-shellscript; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="userdata.txt"
+
+#!/bin/bash
+# --- paste contents of userdata.sh here ---
+--//
diff --git a/ipex/seg/utils/aws/resume.py b/ipex/seg/utils/aws/resume.py
new file mode 100644
index 000000000..b21731c97
--- /dev/null
+++ b/ipex/seg/utils/aws/resume.py
@@ -0,0 +1,40 @@
+# Resume all interrupted trainings in yolov5/ dir including DDP trainings
+# Usage: $ python utils/aws/resume.py
+
+import os
+import sys
+from pathlib import Path
+
+import torch
+import yaml
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[2] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+port = 0 # --master_port
+path = Path('').resolve()
+for last in path.rglob('*/**/last.pt'):
+ ckpt = torch.load(last)
+ if ckpt['optimizer'] is None:
+ continue
+
+ # Load opt.yaml
+ with open(last.parent.parent / 'opt.yaml', errors='ignore') as f:
+ opt = yaml.safe_load(f)
+
+ # Get device count
+ d = opt['device'].split(',') # devices
+ nd = len(d) # number of devices
+ ddp = nd > 1 or (nd == 0 and torch.cuda.device_count() > 1) # distributed data parallel
+
+ if ddp: # multi-GPU
+ port += 1
+ cmd = f'python -m torch.distributed.run --nproc_per_node {nd} --master_port {port} train.py --resume {last}'
+ else: # single-GPU
+ cmd = f'python train.py --resume {last}'
+
+ cmd += ' > /dev/null 2>&1 &' # redirect output to dev/null and run in daemon thread
+ print(cmd)
+ os.system(cmd)
diff --git a/ipex/seg/utils/aws/userdata.sh b/ipex/seg/utils/aws/userdata.sh
new file mode 100644
index 000000000..5fc1332ac
--- /dev/null
+++ b/ipex/seg/utils/aws/userdata.sh
@@ -0,0 +1,27 @@
+#!/bin/bash
+# AWS EC2 instance startup script https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/user-data.html
+# This script will run only once on first instance start (for a re-start script see mime.sh)
+# /home/ubuntu (ubuntu) or /home/ec2-user (amazon-linux) is working dir
+# Use >300 GB SSD
+
+cd home/ubuntu
+if [ ! -d yolov5 ]; then
+ echo "Running first-time script." # install dependencies, download COCO, pull Docker
+ git clone https://github.com/ultralytics/yolov5 -b master && sudo chmod -R 777 yolov5
+ cd yolov5
+ bash data/scripts/get_coco.sh && echo "COCO done." &
+ sudo docker pull ultralytics/yolov5:latest && echo "Docker done." &
+ python -m pip install --upgrade pip && pip install -r requirements.txt && python detect.py && echo "Requirements done." &
+ wait && echo "All tasks done." # finish background tasks
+else
+ echo "Running re-start script." # resume interrupted runs
+ i=0
+ list=$(sudo docker ps -qa) # container list i.e. $'one\ntwo\nthree\nfour'
+ while IFS= read -r id; do
+ ((i++))
+ echo "restarting container $i: $id"
+ sudo docker start $id
+ # sudo docker exec -it $id python train.py --resume # single-GPU
+ sudo docker exec -d $id python utils/aws/resume.py # multi-scenario
+ done <<<"$list"
+fi
diff --git a/ipex/seg/utils/benchmarks.py b/ipex/seg/utils/benchmarks.py
new file mode 100644
index 000000000..d412653c8
--- /dev/null
+++ b/ipex/seg/utils/benchmarks.py
@@ -0,0 +1,157 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run YOLOv5 benchmarks on all supported export formats
+
+Format | `export.py --include` | Model
+--- | --- | ---
+PyTorch | - | yolov5s.pt
+TorchScript | `torchscript` | yolov5s.torchscript
+ONNX | `onnx` | yolov5s.onnx
+OpenVINO | `openvino` | yolov5s_openvino_model/
+TensorRT | `engine` | yolov5s.engine
+CoreML | `coreml` | yolov5s.mlmodel
+TensorFlow SavedModel | `saved_model` | yolov5s_saved_model/
+TensorFlow GraphDef | `pb` | yolov5s.pb
+TensorFlow Lite | `tflite` | yolov5s.tflite
+TensorFlow Edge TPU | `edgetpu` | yolov5s_edgetpu.tflite
+TensorFlow.js | `tfjs` | yolov5s_web_model/
+
+Requirements:
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu # CPU
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime-gpu openvino-dev tensorflow # GPU
+ $ pip install -U nvidia-tensorrt --index-url https://pypi.ngc.nvidia.com # TensorRT
+
+Usage:
+ $ python utils/benchmarks.py --weights yolov5s.pt --img 640
+"""
+
+import argparse
+import platform
+import sys
+import time
+from pathlib import Path
+
+import pandas as pd
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+# ROOT = ROOT.relative_to(Path.cwd()) # relative
+
+import export
+import val
+from utils import notebook_init
+from utils.general import LOGGER, check_yaml, file_size, print_args
+from utils.torch_utils import select_device
+
+
+def run(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=640, # inference size (pixels)
+ batch_size=1, # batch size
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ half=False, # use FP16 half-precision inference
+ test=False, # test exports only
+ pt_only=False, # test PyTorch only
+ hard_fail=False, # throw error on benchmark failure
+):
+ y, t = [], time.time()
+ device = select_device(device)
+ for i, (name, f, suffix, cpu, gpu) in export.export_formats().iterrows(): # index, (name, file, suffix, CPU, GPU)
+ try:
+ assert i not in (9, 10), 'inference not supported' # Edge TPU and TF.js are unsupported
+ assert i != 5 or platform.system() == 'Darwin', 'inference only supported on macOS>=10.13' # CoreML
+ if 'cpu' in device.type:
+ assert cpu, 'inference not supported on CPU'
+ if 'cuda' in device.type:
+ assert gpu, 'inference not supported on GPU'
+
+ # Export
+ if f == '-':
+ w = weights # PyTorch format
+ else:
+ w = export.run(weights=weights, imgsz=[imgsz], include=[f], device=device, half=half)[-1] # all others
+ assert suffix in str(w), 'export failed'
+
+ # Validate
+ result = val.run(data, w, batch_size, imgsz, plots=False, device=device, task='benchmark', half=half)
+ metrics = result[0] # metrics (mp, mr, map50, map, *losses(box, obj, cls))
+ speeds = result[2] # times (preprocess, inference, postprocess)
+ y.append([name, round(file_size(w), 1), round(metrics[3], 4), round(speeds[1], 2)]) # MB, mAP, t_inference
+ except Exception as e:
+ if hard_fail:
+ assert type(e) is AssertionError, f'Benchmark --hard-fail for {name}: {e}'
+ LOGGER.warning(f'WARNING: Benchmark failure for {name}: {e}')
+ y.append([name, None, None, None]) # mAP, t_inference
+ if pt_only and i == 0:
+ break # break after PyTorch
+
+ # Print results
+ LOGGER.info('\n')
+ parse_opt()
+ notebook_init() # print system info
+ c = ['Format', 'Size (MB)', 'mAP@0.5:0.95', 'Inference time (ms)'] if map else ['Format', 'Export', '', '']
+ py = pd.DataFrame(y, columns=c)
+ LOGGER.info(f'\nBenchmarks complete ({time.time() - t:.2f}s)')
+ LOGGER.info(str(py if map else py.iloc[:, :2]))
+ return py
+
+
+def test(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=640, # inference size (pixels)
+ batch_size=1, # batch size
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ half=False, # use FP16 half-precision inference
+ test=False, # test exports only
+ pt_only=False, # test PyTorch only
+ hard_fail=False, # throw error on benchmark failure
+):
+ y, t = [], time.time()
+ device = select_device(device)
+ for i, (name, f, suffix, gpu) in export.export_formats().iterrows(): # index, (name, file, suffix, gpu-capable)
+ try:
+ w = weights if f == '-' else \
+ export.run(weights=weights, imgsz=[imgsz], include=[f], device=device, half=half)[-1] # weights
+ assert suffix in str(w), 'export failed'
+ y.append([name, True])
+ except Exception:
+ y.append([name, False]) # mAP, t_inference
+
+ # Print results
+ LOGGER.info('\n')
+ parse_opt()
+ notebook_init() # print system info
+ py = pd.DataFrame(y, columns=['Format', 'Export'])
+ LOGGER.info(f'\nExports complete ({time.time() - t:.2f}s)')
+ LOGGER.info(str(py))
+ return py
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='weights path')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--test', action='store_true', help='test exports only')
+ parser.add_argument('--pt-only', action='store_true', help='test PyTorch only')
+ parser.add_argument('--hard-fail', action='store_true', help='throw error on benchmark failure')
+ opt = parser.parse_args()
+ opt.data = check_yaml(opt.data) # check YAML
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ test(**vars(opt)) if opt.test else run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/ipex/seg/utils/callbacks.py b/ipex/seg/utils/callbacks.py
new file mode 100644
index 000000000..166d89383
--- /dev/null
+++ b/ipex/seg/utils/callbacks.py
@@ -0,0 +1,76 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Callback utils
+"""
+
+import threading
+
+
+class Callbacks:
+ """"
+ Handles all registered callbacks for YOLOv5 Hooks
+ """
+
+ def __init__(self):
+ # Define the available callbacks
+ self._callbacks = {
+ 'on_pretrain_routine_start': [],
+ 'on_pretrain_routine_end': [],
+ 'on_train_start': [],
+ 'on_train_epoch_start': [],
+ 'on_train_batch_start': [],
+ 'optimizer_step': [],
+ 'on_before_zero_grad': [],
+ 'on_train_batch_end': [],
+ 'on_train_epoch_end': [],
+ 'on_val_start': [],
+ 'on_val_batch_start': [],
+ 'on_val_image_end': [],
+ 'on_val_batch_end': [],
+ 'on_val_end': [],
+ 'on_fit_epoch_end': [], # fit = train + val
+ 'on_model_save': [],
+ 'on_train_end': [],
+ 'on_params_update': [],
+ 'teardown': [],}
+ self.stop_training = False # set True to interrupt training
+
+ def register_action(self, hook, name='', callback=None):
+ """
+ Register a new action to a callback hook
+
+ Args:
+ hook: The callback hook name to register the action to
+ name: The name of the action for later reference
+ callback: The callback to fire
+ """
+ assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
+ assert callable(callback), f"callback '{callback}' is not callable"
+ self._callbacks[hook].append({'name': name, 'callback': callback})
+
+ def get_registered_actions(self, hook=None):
+ """"
+ Returns all the registered actions by callback hook
+
+ Args:
+ hook: The name of the hook to check, defaults to all
+ """
+ return self._callbacks[hook] if hook else self._callbacks
+
+ def run(self, hook, *args, thread=False, **kwargs):
+ """
+ Loop through the registered actions and fire all callbacks on main thread
+
+ Args:
+ hook: The name of the hook to check, defaults to all
+ args: Arguments to receive from YOLOv5
+ thread: (boolean) Run callbacks in daemon thread
+ kwargs: Keyword Arguments to receive from YOLOv5
+ """
+
+ assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
+ for logger in self._callbacks[hook]:
+ if thread:
+ threading.Thread(target=logger['callback'], args=args, kwargs=kwargs, daemon=True).start()
+ else:
+ logger['callback'](*args, **kwargs)
diff --git a/ipex/seg/utils/dataloaders.py b/ipex/seg/utils/dataloaders.py
new file mode 100644
index 000000000..1c11fdeed
--- /dev/null
+++ b/ipex/seg/utils/dataloaders.py
@@ -0,0 +1,1159 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Dataloaders and dataset utils
+"""
+
+import contextlib
+import glob
+import hashlib
+import json
+import math
+import os
+import random
+import shutil
+import time
+from itertools import repeat
+from multiprocessing.pool import Pool, ThreadPool
+from pathlib import Path
+from threading import Thread
+from urllib.parse import urlparse
+from zipfile import ZipFile
+
+import numpy as np
+import torch
+import torch.nn.functional as F
+import torchvision
+import yaml
+from PIL import ExifTags, Image, ImageOps
+from torch.utils.data import DataLoader, Dataset, dataloader, distributed
+from tqdm import tqdm
+
+from utils.augmentations import (Albumentations, augment_hsv, classify_albumentations, classify_transforms, copy_paste,
+ letterbox, mixup, random_perspective)
+from utils.general import (DATASETS_DIR, LOGGER, NUM_THREADS, check_dataset, check_requirements, check_yaml, clean_str,
+ cv2, is_colab, is_kaggle, segments2boxes, xyn2xy, xywh2xyxy, xywhn2xyxy, xyxy2xywhn)
+from utils.torch_utils import torch_distributed_zero_first
+
+# Parameters
+HELP_URL = 'See https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
+IMG_FORMATS = 'bmp', 'dng', 'jpeg', 'jpg', 'mpo', 'png', 'tif', 'tiff', 'webp' # include image suffixes
+VID_FORMATS = 'asf', 'avi', 'gif', 'm4v', 'mkv', 'mov', 'mp4', 'mpeg', 'mpg', 'ts', 'wmv' # include video suffixes
+BAR_FORMAT = '{l_bar}{bar:10}{r_bar}{bar:-10b}' # tqdm bar format
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+
+# Get orientation exif tag
+for orientation in ExifTags.TAGS.keys():
+ if ExifTags.TAGS[orientation] == 'Orientation':
+ break
+
+
+def get_hash(paths):
+ # Returns a single hash value of a list of paths (files or dirs)
+ size = sum(os.path.getsize(p) for p in paths if os.path.exists(p)) # sizes
+ h = hashlib.md5(str(size).encode()) # hash sizes
+ h.update(''.join(paths).encode()) # hash paths
+ return h.hexdigest() # return hash
+
+
+def exif_size(img):
+ # Returns exif-corrected PIL size
+ s = img.size # (width, height)
+ with contextlib.suppress(Exception):
+ rotation = dict(img._getexif().items())[orientation]
+ if rotation in [6, 8]: # rotation 270 or 90
+ s = (s[1], s[0])
+ return s
+
+
+def exif_transpose(image):
+ """
+ Transpose a PIL image accordingly if it has an EXIF Orientation tag.
+ Inplace version of https://github.com/python-pillow/Pillow/blob/master/src/PIL/ImageOps.py exif_transpose()
+
+ :param image: The image to transpose.
+ :return: An image.
+ """
+ exif = image.getexif()
+ orientation = exif.get(0x0112, 1) # default 1
+ if orientation > 1:
+ method = {
+ 2: Image.FLIP_LEFT_RIGHT,
+ 3: Image.ROTATE_180,
+ 4: Image.FLIP_TOP_BOTTOM,
+ 5: Image.TRANSPOSE,
+ 6: Image.ROTATE_270,
+ 7: Image.TRANSVERSE,
+ 8: Image.ROTATE_90,}.get(orientation)
+ if method is not None:
+ image = image.transpose(method)
+ del exif[0x0112]
+ image.info["exif"] = exif.tobytes()
+ return image
+
+
+def seed_worker(worker_id):
+ # Set dataloader worker seed https://pytorch.org/docs/stable/notes/randomness.html#dataloader
+ worker_seed = torch.initial_seed() % 2 ** 32
+ np.random.seed(worker_seed)
+ random.seed(worker_seed)
+
+
+def create_dataloader(path,
+ imgsz,
+ batch_size,
+ stride,
+ single_cls=False,
+ hyp=None,
+ augment=False,
+ cache=False,
+ pad=0.0,
+ rect=False,
+ rank=-1,
+ workers=8,
+ image_weights=False,
+ quad=False,
+ prefix='',
+ shuffle=False):
+ if rect and shuffle:
+ LOGGER.warning('WARNING: --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ shuffle = False
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = LoadImagesAndLabels(
+ path,
+ imgsz,
+ batch_size,
+ augment=augment, # augmentation
+ hyp=hyp, # hyperparameters
+ rect=rect, # rectangular batches
+ cache_images=cache,
+ single_cls=single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix)
+
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count() # number of CUDA devices
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
+ # generator = torch.Generator()
+ # generator.manual_seed(0)
+ return loader(
+ dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn,
+ worker_init_fn=seed_worker,
+ # generator=generator,
+ ), dataset
+
+
+class InfiniteDataLoader(dataloader.DataLoader):
+ """ Dataloader that reuses workers
+
+ Uses same syntax as vanilla DataLoader
+ """
+
+ def __init__(self, *args, **kwargs):
+ super().__init__(*args, **kwargs)
+ object.__setattr__(self, 'batch_sampler', _RepeatSampler(self.batch_sampler))
+ self.iterator = super().__iter__()
+
+ def __len__(self):
+ return len(self.batch_sampler.sampler)
+
+ def __iter__(self):
+ for _ in range(len(self)):
+ yield next(self.iterator)
+
+
+class _RepeatSampler:
+ """ Sampler that repeats forever
+
+ Args:
+ sampler (Sampler)
+ """
+
+ def __init__(self, sampler):
+ self.sampler = sampler
+
+ def __iter__(self):
+ while True:
+ yield from iter(self.sampler)
+
+
+class LoadImages:
+ # YOLOv5 image/video dataloader, i.e. `python detect.py --source image.jpg/vid.mp4`
+ def __init__(self, path, img_size=640, stride=32, auto=True, transforms=None):
+ files = []
+ for p in sorted(path) if isinstance(path, (list, tuple)) else [path]:
+ p = str(Path(p).resolve())
+ if '*' in p:
+ files.extend(sorted(glob.glob(p, recursive=True))) # glob
+ elif os.path.isdir(p):
+ files.extend(sorted(glob.glob(os.path.join(p, '*.*')))) # dir
+ elif os.path.isfile(p):
+ files.append(p) # files
+ else:
+ raise FileNotFoundError(f'{p} does not exist')
+
+ images = [x for x in files if x.split('.')[-1].lower() in IMG_FORMATS]
+ videos = [x for x in files if x.split('.')[-1].lower() in VID_FORMATS]
+ ni, nv = len(images), len(videos)
+
+ self.img_size = img_size
+ self.stride = stride
+ self.files = images + videos
+ self.nf = ni + nv # number of files
+ self.video_flag = [False] * ni + [True] * nv
+ self.mode = 'image'
+ self.auto = auto
+ self.transforms = transforms # optional
+ if any(videos):
+ self.new_video(videos[0]) # new video
+ else:
+ self.cap = None
+ assert self.nf > 0, f'No images or videos found in {p}. ' \
+ f'Supported formats are:\nimages: {IMG_FORMATS}\nvideos: {VID_FORMATS}'
+
+ def __iter__(self):
+ self.count = 0
+ return self
+
+ def __next__(self):
+ if self.count == self.nf:
+ raise StopIteration
+ path = self.files[self.count]
+
+ if self.video_flag[self.count]:
+ # Read video
+ self.mode = 'video'
+ ret_val, im0 = self.cap.read()
+ while not ret_val:
+ self.count += 1
+ self.cap.release()
+ if self.count == self.nf: # last video
+ raise StopIteration
+ path = self.files[self.count]
+ self.new_video(path)
+ ret_val, im0 = self.cap.read()
+
+ self.frame += 1
+ s = f'video {self.count + 1}/{self.nf} ({self.frame}/{self.frames}) {path}: '
+
+ else:
+ # Read image
+ self.count += 1
+ im0 = cv2.imread(path) # BGR
+ assert im0 is not None, f'Image Not Found {path}'
+ s = f'image {self.count}/{self.nf} {path}: '
+
+ if self.transforms:
+ im = self.transforms(cv2.cvtColor(im0, cv2.COLOR_BGR2RGB)) # transforms
+ else:
+ im = letterbox(im0, self.img_size, stride=self.stride, auto=self.auto)[0] # padded resize
+ im = im.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ im = np.ascontiguousarray(im) # contiguous
+
+ return path, im, im0, self.cap, s
+
+ def new_video(self, path):
+ self.frame = 0
+ self.cap = cv2.VideoCapture(path)
+ self.frames = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
+
+ def __len__(self):
+ return self.nf # number of files
+
+
+class LoadWebcam: # for inference
+ # YOLOv5 local webcam dataloader, i.e. `python detect.py --source 0`
+ def __init__(self, pipe='0', img_size=640, stride=32):
+ self.img_size = img_size
+ self.stride = stride
+ self.pipe = eval(pipe) if pipe.isnumeric() else pipe
+ self.cap = cv2.VideoCapture(self.pipe) # video capture object
+ self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ self.cap.release()
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Read frame
+ ret_val, im0 = self.cap.read()
+ im0 = cv2.flip(im0, 1) # flip left-right
+
+ # Print
+ assert ret_val, f'Camera Error {self.pipe}'
+ img_path = 'webcam.jpg'
+ s = f'webcam {self.count}: '
+
+ # Process
+ im = letterbox(im0, self.img_size, stride=self.stride)[0] # resize
+ im = im.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ im = np.ascontiguousarray(im) # contiguous
+
+ return img_path, im, im0, None, s
+
+ def __len__(self):
+ return 0
+
+
+class LoadStreams:
+ # YOLOv5 streamloader, i.e. `python detect.py --source 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP streams`
+ def __init__(self, sources='streams.txt', img_size=640, stride=32, auto=True, transforms=None):
+ self.mode = 'stream'
+ self.img_size = img_size
+ self.stride = stride
+
+ if os.path.isfile(sources):
+ with open(sources) as f:
+ sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
+ else:
+ sources = [sources]
+
+ n = len(sources)
+ self.imgs, self.fps, self.frames, self.threads = [None] * n, [0] * n, [0] * n, [None] * n
+ self.sources = [clean_str(x) for x in sources] # clean source names for later
+ for i, s in enumerate(sources): # index, source
+ # Start thread to read frames from video stream
+ st = f'{i + 1}/{n}: {s}... '
+ if urlparse(s).hostname in ('www.youtube.com', 'youtube.com', 'youtu.be'): # if source is YouTube video
+ check_requirements(('pafy', 'youtube_dl==2020.12.2'))
+ import pafy
+ s = pafy.new(s).getbest(preftype="mp4").url # YouTube URL
+ s = eval(s) if s.isnumeric() else s # i.e. s = '0' local webcam
+ if s == 0:
+ assert not is_colab(), '--source 0 webcam unsupported on Colab. Rerun command in a local environment.'
+ assert not is_kaggle(), '--source 0 webcam unsupported on Kaggle. Rerun command in a local environment.'
+ cap = cv2.VideoCapture(s)
+ assert cap.isOpened(), f'{st}Failed to open {s}'
+ w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ fps = cap.get(cv2.CAP_PROP_FPS) # warning: may return 0 or nan
+ self.frames[i] = max(int(cap.get(cv2.CAP_PROP_FRAME_COUNT)), 0) or float('inf') # infinite stream fallback
+ self.fps[i] = max((fps if math.isfinite(fps) else 0) % 100, 0) or 30 # 30 FPS fallback
+
+ _, self.imgs[i] = cap.read() # guarantee first frame
+ self.threads[i] = Thread(target=self.update, args=([i, cap, s]), daemon=True)
+ LOGGER.info(f"{st} Success ({self.frames[i]} frames {w}x{h} at {self.fps[i]:.2f} FPS)")
+ self.threads[i].start()
+ LOGGER.info('') # newline
+
+ # check for common shapes
+ s = np.stack([letterbox(x, img_size, stride=stride, auto=auto)[0].shape for x in self.imgs])
+ self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
+ self.auto = auto and self.rect
+ self.transforms = transforms # optional
+ if not self.rect:
+ LOGGER.warning('WARNING: Stream shapes differ. For optimal performance supply similarly-shaped streams.')
+
+ def update(self, i, cap, stream):
+ # Read stream `i` frames in daemon thread
+ n, f, read = 0, self.frames[i], 1 # frame number, frame array, inference every 'read' frame
+ while cap.isOpened() and n < f:
+ n += 1
+ # _, self.imgs[index] = cap.read()
+ cap.grab()
+ if n % read == 0:
+ success, im = cap.retrieve()
+ if success:
+ self.imgs[i] = im
+ else:
+ LOGGER.warning('WARNING: Video stream unresponsive, please check your IP camera connection.')
+ self.imgs[i] = np.zeros_like(self.imgs[i])
+ cap.open(stream) # re-open stream if signal was lost
+ time.sleep(0.0) # wait time
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if not all(x.is_alive() for x in self.threads) or cv2.waitKey(1) == ord('q'): # q to quit
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ im0 = self.imgs.copy()
+ if self.transforms:
+ im = np.stack([self.transforms(cv2.cvtColor(x, cv2.COLOR_BGR2RGB)) for x in im0]) # transforms
+ else:
+ im = np.stack([letterbox(x, self.img_size, stride=self.stride, auto=self.auto)[0] for x in im0]) # resize
+ im = im[..., ::-1].transpose((0, 3, 1, 2)) # BGR to RGB, BHWC to BCHW
+ im = np.ascontiguousarray(im) # contiguous
+
+ return self.sources, im, im0, None, ''
+
+ def __len__(self):
+ return len(self.sources) # 1E12 frames = 32 streams at 30 FPS for 30 years
+
+
+def img2label_paths(img_paths):
+ # Define label paths as a function of image paths
+ sa, sb = f'{os.sep}images{os.sep}', f'{os.sep}labels{os.sep}' # /images/, /labels/ substrings
+ return [sb.join(x.rsplit(sa, 1)).rsplit('.', 1)[0] + '.txt' for x in img_paths]
+
+
+class LoadImagesAndLabels(Dataset):
+ # YOLOv5 train_loader/val_loader, loads images and labels for training and validation
+ cache_version = 0.6 # dataset labels *.cache version
+ rand_interp_methods = [cv2.INTER_NEAREST, cv2.INTER_LINEAR, cv2.INTER_CUBIC, cv2.INTER_AREA, cv2.INTER_LANCZOS4]
+
+ def __init__(self,
+ path,
+ img_size=640,
+ batch_size=16,
+ augment=False,
+ hyp=None,
+ rect=False,
+ image_weights=False,
+ cache_images=False,
+ single_cls=False,
+ stride=32,
+ pad=0.0,
+ prefix=''):
+ self.img_size = img_size
+ self.augment = augment
+ self.hyp = hyp
+ self.image_weights = image_weights
+ self.rect = False if image_weights else rect
+ self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
+ self.mosaic_border = [-img_size // 2, -img_size // 2]
+ self.stride = stride
+ self.path = path
+ self.albumentations = Albumentations() if augment else None
+
+ try:
+ f = [] # image files
+ for p in path if isinstance(path, list) else [path]:
+ p = Path(p) # os-agnostic
+ if p.is_dir(): # dir
+ f += glob.glob(str(p / '**' / '*.*'), recursive=True)
+ # f = list(p.rglob('*.*')) # pathlib
+ elif p.is_file(): # file
+ with open(p) as t:
+ t = t.read().strip().splitlines()
+ parent = str(p.parent) + os.sep
+ f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
+ # f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
+ else:
+ raise FileNotFoundError(f'{prefix}{p} does not exist')
+ self.im_files = sorted(x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in IMG_FORMATS)
+ # self.img_files = sorted([x for x in f if x.suffix[1:].lower() in IMG_FORMATS]) # pathlib
+ assert self.im_files, f'{prefix}No images found'
+ except Exception as e:
+ raise Exception(f'{prefix}Error loading data from {path}: {e}\n{HELP_URL}')
+
+ # Check cache
+ self.label_files = img2label_paths(self.im_files) # labels
+ cache_path = (p if p.is_file() else Path(self.label_files[0]).parent).with_suffix('.cache')
+ try:
+ cache, exists = np.load(cache_path, allow_pickle=True).item(), True # load dict
+ assert cache['version'] == self.cache_version # matches current version
+ assert cache['hash'] == get_hash(self.label_files + self.im_files) # identical hash
+ except Exception:
+ cache, exists = self.cache_labels(cache_path, prefix), False # run cache ops
+
+ # Display cache
+ nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupt, total
+ if exists and LOCAL_RANK in {-1, 0}:
+ d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupt"
+ tqdm(None, desc=prefix + d, total=n, initial=n, bar_format=BAR_FORMAT) # display cache results
+ if cache['msgs']:
+ LOGGER.info('\n'.join(cache['msgs'])) # display warnings
+ assert nf > 0 or not augment, f'{prefix}No labels found in {cache_path}, can not start training. {HELP_URL}'
+
+ # Read cache
+ [cache.pop(k) for k in ('hash', 'version', 'msgs')] # remove items
+ labels, shapes, self.segments = zip(*cache.values())
+ nl = len(np.concatenate(labels, 0)) # number of labels
+ assert nl > 0 or not augment, f'{prefix}All labels empty in {cache_path}, can not start training. {HELP_URL}'
+ self.labels = list(labels)
+ self.shapes = np.array(shapes)
+ self.im_files = list(cache.keys()) # update
+ self.label_files = img2label_paths(cache.keys()) # update
+ n = len(shapes) # number of images
+ bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
+ nb = bi[-1] + 1 # number of batches
+ self.batch = bi # batch index of image
+ self.n = n
+ self.indices = range(n)
+
+ # Update labels
+ include_class = [] # filter labels to include only these classes (optional)
+ include_class_array = np.array(include_class).reshape(1, -1)
+ for i, (label, segment) in enumerate(zip(self.labels, self.segments)):
+ if include_class:
+ j = (label[:, 0:1] == include_class_array).any(1)
+ self.labels[i] = label[j]
+ if segment:
+ self.segments[i] = segment[j]
+ if single_cls: # single-class training, merge all classes into 0
+ self.labels[i][:, 0] = 0
+ if segment:
+ self.segments[i][:, 0] = 0
+
+ # Rectangular Training
+ if self.rect:
+ # Sort by aspect ratio
+ s = self.shapes # wh
+ ar = s[:, 1] / s[:, 0] # aspect ratio
+ irect = ar.argsort()
+ self.im_files = [self.im_files[i] for i in irect]
+ self.label_files = [self.label_files[i] for i in irect]
+ self.labels = [self.labels[i] for i in irect]
+ self.segments = [self.segments[i] for i in irect]
+ self.shapes = s[irect] # wh
+ ar = ar[irect]
+
+ # Set training image shapes
+ shapes = [[1, 1]] * nb
+ for i in range(nb):
+ ari = ar[bi == i]
+ mini, maxi = ari.min(), ari.max()
+ if maxi < 1:
+ shapes[i] = [maxi, 1]
+ elif mini > 1:
+ shapes[i] = [1, 1 / mini]
+
+ self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(np.int) * stride
+
+ # Cache images into RAM/disk for faster training (WARNING: large datasets may exceed system resources)
+ self.ims = [None] * n
+ self.npy_files = [Path(f).with_suffix('.npy') for f in self.im_files]
+ if cache_images:
+ gb = 0 # Gigabytes of cached images
+ self.im_hw0, self.im_hw = [None] * n, [None] * n
+ fcn = self.cache_images_to_disk if cache_images == 'disk' else self.load_image
+ results = ThreadPool(NUM_THREADS).imap(fcn, range(n))
+ pbar = tqdm(enumerate(results), total=n, bar_format=BAR_FORMAT, disable=LOCAL_RANK > 0)
+ for i, x in pbar:
+ if cache_images == 'disk':
+ gb += self.npy_files[i].stat().st_size
+ else: # 'ram'
+ self.ims[i], self.im_hw0[i], self.im_hw[i] = x # im, hw_orig, hw_resized = load_image(self, i)
+ gb += self.ims[i].nbytes
+ pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB {cache_images})'
+ pbar.close()
+
+ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
+ # Cache dataset labels, check images and read shapes
+ x = {} # dict
+ nm, nf, ne, nc, msgs = 0, 0, 0, 0, [] # number missing, found, empty, corrupt, messages
+ desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels..."
+ with Pool(NUM_THREADS) as pool:
+ pbar = tqdm(pool.imap(verify_image_label, zip(self.im_files, self.label_files, repeat(prefix))),
+ desc=desc,
+ total=len(self.im_files),
+ bar_format=BAR_FORMAT)
+ for im_file, lb, shape, segments, nm_f, nf_f, ne_f, nc_f, msg in pbar:
+ nm += nm_f
+ nf += nf_f
+ ne += ne_f
+ nc += nc_f
+ if im_file:
+ x[im_file] = [lb, shape, segments]
+ if msg:
+ msgs.append(msg)
+ pbar.desc = f"{desc}{nf} found, {nm} missing, {ne} empty, {nc} corrupt"
+
+ pbar.close()
+ if msgs:
+ LOGGER.info('\n'.join(msgs))
+ if nf == 0:
+ LOGGER.warning(f'{prefix}WARNING: No labels found in {path}. {HELP_URL}')
+ x['hash'] = get_hash(self.label_files + self.im_files)
+ x['results'] = nf, nm, ne, nc, len(self.im_files)
+ x['msgs'] = msgs # warnings
+ x['version'] = self.cache_version # cache version
+ try:
+ np.save(path, x) # save cache for next time
+ path.with_suffix('.cache.npy').rename(path) # remove .npy suffix
+ LOGGER.info(f'{prefix}New cache created: {path}')
+ except Exception as e:
+ LOGGER.warning(f'{prefix}WARNING: Cache directory {path.parent} is not writeable: {e}') # not writeable
+ return x
+
+ def __len__(self):
+ return len(self.im_files)
+
+ # def __iter__(self):
+ # self.count = -1
+ # print('ran dataset iter')
+ # #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
+ # return self
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ if mosaic:
+ # Load mosaic
+ img, labels = self.load_mosaic(index)
+ shapes = None
+
+ # MixUp augmentation
+ if random.random() < hyp['mixup']:
+ img, labels = mixup(img, labels, *self.load_mosaic(random.randint(0, self.n - 1)))
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = self.load_image(index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ img, labels = random_perspective(img,
+ labels,
+ degrees=hyp['degrees'],
+ translate=hyp['translate'],
+ scale=hyp['scale'],
+ shear=hyp['shear'],
+ perspective=hyp['perspective'])
+
+ nl = len(labels) # number of labels
+ if nl:
+ labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1E-3)
+
+ if self.augment:
+ # Albumentations
+ img, labels = self.albumentations(img, labels)
+ nl = len(labels) # update after albumentations
+
+ # HSV color-space
+ augment_hsv(img, hgain=hyp['hsv_h'], sgain=hyp['hsv_s'], vgain=hyp['hsv_v'])
+
+ # Flip up-down
+ if random.random() < hyp['flipud']:
+ img = np.flipud(img)
+ if nl:
+ labels[:, 2] = 1 - labels[:, 2]
+
+ # Flip left-right
+ if random.random() < hyp['fliplr']:
+ img = np.fliplr(img)
+ if nl:
+ labels[:, 1] = 1 - labels[:, 1]
+
+ # Cutouts
+ # labels = cutout(img, labels, p=0.5)
+ # nl = len(labels) # update after cutout
+
+ labels_out = torch.zeros((nl, 6))
+ if nl:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return torch.from_numpy(img), labels_out, self.im_files[index], shapes
+
+ def load_image(self, i):
+ # Loads 1 image from dataset index 'i', returns (im, original hw, resized hw)
+ im, f, fn = self.ims[i], self.im_files[i], self.npy_files[i],
+ if im is None: # not cached in RAM
+ if fn.exists(): # load npy
+ im = np.load(fn)
+ else: # read image
+ im = cv2.imread(f) # BGR
+ assert im is not None, f'Image Not Found {f}'
+ h0, w0 = im.shape[:2] # orig hw
+ r = self.img_size / max(h0, w0) # ratio
+ if r != 1: # if sizes are not equal
+ interp = cv2.INTER_LINEAR if (self.augment or r > 1) else cv2.INTER_AREA
+ im = cv2.resize(im, (int(w0 * r), int(h0 * r)), interpolation=interp)
+ return im, (h0, w0), im.shape[:2] # im, hw_original, hw_resized
+ return self.ims[i], self.im_hw0[i], self.im_hw[i] # im, hw_original, hw_resized
+
+ def cache_images_to_disk(self, i):
+ # Saves an image as an *.npy file for faster loading
+ f = self.npy_files[i]
+ if not f.exists():
+ np.save(f.as_posix(), cv2.imread(self.im_files[i]))
+
+ def load_mosaic(self, index):
+ # YOLOv5 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ random.shuffle(indices)
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp['copy_paste'])
+ img4, labels4 = random_perspective(img4,
+ labels4,
+ segments4,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img4, labels4
+
+ def load_mosaic9(self, index):
+ # YOLOv5 9-mosaic loader. Loads 1 image + 8 random images into a 9-image mosaic
+ labels9, segments9 = [], []
+ s = self.img_size
+ indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
+ random.shuffle(indices)
+ hp, wp = -1, -1 # height, width previous
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img9
+ if i == 0: # center
+ img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ h0, w0 = h, w
+ c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
+ elif i == 1: # top
+ c = s, s - h, s + w, s
+ elif i == 2: # top right
+ c = s + wp, s - h, s + wp + w, s
+ elif i == 3: # right
+ c = s + w0, s, s + w0 + w, s + h
+ elif i == 4: # bottom right
+ c = s + w0, s + hp, s + w0 + w, s + hp + h
+ elif i == 5: # bottom
+ c = s + w0 - w, s + h0, s + w0, s + h0 + h
+ elif i == 6: # bottom left
+ c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
+ elif i == 7: # left
+ c = s - w, s + h0 - h, s, s + h0
+ elif i == 8: # top left
+ c = s - w, s + h0 - hp - h, s, s + h0 - hp
+
+ padx, pady = c[:2]
+ x1, y1, x2, y2 = (max(x, 0) for x in c) # allocate coords
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
+ labels9.append(labels)
+ segments9.extend(segments)
+
+ # Image
+ img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
+ hp, wp = h, w # height, width previous
+
+ # Offset
+ yc, xc = (int(random.uniform(0, s)) for _ in self.mosaic_border) # mosaic center x, y
+ img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
+
+ # Concat/clip labels
+ labels9 = np.concatenate(labels9, 0)
+ labels9[:, [1, 3]] -= xc
+ labels9[:, [2, 4]] -= yc
+ c = np.array([xc, yc]) # centers
+ segments9 = [x - c for x in segments9]
+
+ for x in (labels9[:, 1:], *segments9):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img9, labels9 = replicate(img9, labels9) # replicate
+
+ # Augment
+ img9, labels9 = random_perspective(img9,
+ labels9,
+ segments9,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img9, labels9
+
+ @staticmethod
+ def collate_fn(batch):
+ im, label, path, shapes = zip(*batch) # transposed
+ for i, lb in enumerate(label):
+ lb[:, 0] = i # add target image index for build_targets()
+ return torch.stack(im, 0), torch.cat(label, 0), path, shapes
+
+ @staticmethod
+ def collate_fn4(batch):
+ im, label, path, shapes = zip(*batch) # transposed
+ n = len(shapes) // 4
+ im4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
+
+ ho = torch.tensor([[0.0, 0, 0, 1, 0, 0]])
+ wo = torch.tensor([[0.0, 0, 1, 0, 0, 0]])
+ s = torch.tensor([[1, 1, 0.5, 0.5, 0.5, 0.5]]) # scale
+ for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
+ i *= 4
+ if random.random() < 0.5:
+ im1 = F.interpolate(im[i].unsqueeze(0).float(), scale_factor=2.0, mode='bilinear',
+ align_corners=False)[0].type(im[i].type())
+ lb = label[i]
+ else:
+ im1 = torch.cat((torch.cat((im[i], im[i + 1]), 1), torch.cat((im[i + 2], im[i + 3]), 1)), 2)
+ lb = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
+ im4.append(im1)
+ label4.append(lb)
+
+ for i, lb in enumerate(label4):
+ lb[:, 0] = i # add target image index for build_targets()
+
+ return torch.stack(im4, 0), torch.cat(label4, 0), path4, shapes4
+
+
+# Ancillary functions --------------------------------------------------------------------------------------------------
+def flatten_recursive(path=DATASETS_DIR / 'coco128'):
+ # Flatten a recursive directory by bringing all files to top level
+ new_path = Path(f'{str(path)}_flat')
+ if os.path.exists(new_path):
+ shutil.rmtree(new_path) # delete output folder
+ os.makedirs(new_path) # make new output folder
+ for file in tqdm(glob.glob(f'{str(Path(path))}/**/*.*', recursive=True)):
+ shutil.copyfile(file, new_path / Path(file).name)
+
+
+def extract_boxes(path=DATASETS_DIR / 'coco128'): # from utils.dataloaders import *; extract_boxes()
+ # Convert detection dataset into classification dataset, with one directory per class
+ path = Path(path) # images dir
+ shutil.rmtree(path / 'classification') if (path / 'classification').is_dir() else None # remove existing
+ files = list(path.rglob('*.*'))
+ n = len(files) # number of files
+ for im_file in tqdm(files, total=n):
+ if im_file.suffix[1:] in IMG_FORMATS:
+ # image
+ im = cv2.imread(str(im_file))[..., ::-1] # BGR to RGB
+ h, w = im.shape[:2]
+
+ # labels
+ lb_file = Path(img2label_paths([str(im_file)])[0])
+ if Path(lb_file).exists():
+ with open(lb_file) as f:
+ lb = np.array([x.split() for x in f.read().strip().splitlines()], dtype=np.float32) # labels
+
+ for j, x in enumerate(lb):
+ c = int(x[0]) # class
+ f = (path / 'classifier') / f'{c}' / f'{path.stem}_{im_file.stem}_{j}.jpg' # new filename
+ if not f.parent.is_dir():
+ f.parent.mkdir(parents=True)
+
+ b = x[1:] * [w, h, w, h] # box
+ # b[2:] = b[2:].max() # rectangle to square
+ b[2:] = b[2:] * 1.2 + 3 # pad
+ b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
+
+ b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
+ b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
+ assert cv2.imwrite(str(f), im[b[1]:b[3], b[0]:b[2]]), f'box failure in {f}'
+
+
+def autosplit(path=DATASETS_DIR / 'coco128/images', weights=(0.9, 0.1, 0.0), annotated_only=False):
+ """ Autosplit a dataset into train/val/test splits and save path/autosplit_*.txt files
+ Usage: from utils.dataloaders import *; autosplit()
+ Arguments
+ path: Path to images directory
+ weights: Train, val, test weights (list, tuple)
+ annotated_only: Only use images with an annotated txt file
+ """
+ path = Path(path) # images dir
+ files = sorted(x for x in path.rglob('*.*') if x.suffix[1:].lower() in IMG_FORMATS) # image files only
+ n = len(files) # number of files
+ random.seed(0) # for reproducibility
+ indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
+
+ txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
+ [(path.parent / x).unlink(missing_ok=True) for x in txt] # remove existing
+
+ print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
+ for i, img in tqdm(zip(indices, files), total=n):
+ if not annotated_only or Path(img2label_paths([str(img)])[0]).exists(): # check label
+ with open(path.parent / txt[i], 'a') as f:
+ f.write(f'./{img.relative_to(path.parent).as_posix()}' + '\n') # add image to txt file
+
+
+def verify_image_label(args):
+ # Verify one image-label pair
+ im_file, lb_file, prefix = args
+ nm, nf, ne, nc, msg, segments = 0, 0, 0, 0, '', [] # number (missing, found, empty, corrupt), message, segments
+ try:
+ # verify images
+ im = Image.open(im_file)
+ im.verify() # PIL verify
+ shape = exif_size(im) # image size
+ assert (shape[0] > 9) & (shape[1] > 9), f'image size {shape} <10 pixels'
+ assert im.format.lower() in IMG_FORMATS, f'invalid image format {im.format}'
+ if im.format.lower() in ('jpg', 'jpeg'):
+ with open(im_file, 'rb') as f:
+ f.seek(-2, 2)
+ if f.read() != b'\xff\xd9': # corrupt JPEG
+ ImageOps.exif_transpose(Image.open(im_file)).save(im_file, 'JPEG', subsampling=0, quality=100)
+ msg = f'{prefix}WARNING: {im_file}: corrupt JPEG restored and saved'
+
+ # verify labels
+ if os.path.isfile(lb_file):
+ nf = 1 # label found
+ with open(lb_file) as f:
+ lb = [x.split() for x in f.read().strip().splitlines() if len(x)]
+ if any(len(x) > 6 for x in lb): # is segment
+ classes = np.array([x[0] for x in lb], dtype=np.float32)
+ segments = [np.array(x[1:], dtype=np.float32).reshape(-1, 2) for x in lb] # (cls, xy1...)
+ lb = np.concatenate((classes.reshape(-1, 1), segments2boxes(segments)), 1) # (cls, xywh)
+ lb = np.array(lb, dtype=np.float32)
+ nl = len(lb)
+ if nl:
+ assert lb.shape[1] == 5, f'labels require 5 columns, {lb.shape[1]} columns detected'
+ assert (lb >= 0).all(), f'negative label values {lb[lb < 0]}'
+ assert (lb[:, 1:] <= 1).all(), f'non-normalized or out of bounds coordinates {lb[:, 1:][lb[:, 1:] > 1]}'
+ _, i = np.unique(lb, axis=0, return_index=True)
+ if len(i) < nl: # duplicate row check
+ lb = lb[i] # remove duplicates
+ if segments:
+ #segments = segments[i]
+ segments = [segments[x] for x in i]
+ msg = f'{prefix}WARNING: {im_file}: {nl - len(i)} duplicate labels removed'
+ else:
+ ne = 1 # label empty
+ lb = np.zeros((0, 5), dtype=np.float32)
+ else:
+ nm = 1 # label missing
+ lb = np.zeros((0, 5), dtype=np.float32)
+ return im_file, lb, shape, segments, nm, nf, ne, nc, msg
+ except Exception as e:
+ nc = 1
+ msg = f'{prefix}WARNING: {im_file}: ignoring corrupt image/label: {e}'
+ return [None, None, None, None, nm, nf, ne, nc, msg]
+
+
+class HUBDatasetStats():
+ """ Return dataset statistics dictionary with images and instances counts per split per class
+ To run in parent directory: export PYTHONPATH="$PWD/yolov5"
+ Usage1: from utils.dataloaders import *; HUBDatasetStats('coco128.yaml', autodownload=True)
+ Usage2: from utils.dataloaders import *; HUBDatasetStats('path/to/coco128_with_yaml.zip')
+ Arguments
+ path: Path to data.yaml or data.zip (with data.yaml inside data.zip)
+ autodownload: Attempt to download dataset if not found locally
+ """
+
+ def __init__(self, path='coco128.yaml', autodownload=False):
+ # Initialize class
+ zipped, data_dir, yaml_path = self._unzip(Path(path))
+ try:
+ with open(check_yaml(yaml_path), errors='ignore') as f:
+ data = yaml.safe_load(f) # data dict
+ if zipped:
+ data['path'] = data_dir
+ except Exception as e:
+ raise Exception("error/HUB/dataset_stats/yaml_load") from e
+
+ check_dataset(data, autodownload) # download dataset if missing
+ self.hub_dir = Path(data['path'] + '-hub')
+ self.im_dir = self.hub_dir / 'images'
+ self.im_dir.mkdir(parents=True, exist_ok=True) # makes /images
+ self.stats = {'nc': data['nc'], 'names': list(data['names'].values())} # statistics dictionary
+ self.data = data
+
+ @staticmethod
+ def _find_yaml(dir):
+ # Return data.yaml file
+ files = list(dir.glob('*.yaml')) or list(dir.rglob('*.yaml')) # try root level first and then recursive
+ assert files, f'No *.yaml file found in {dir}'
+ if len(files) > 1:
+ files = [f for f in files if f.stem == dir.stem] # prefer *.yaml files that match dir name
+ assert files, f'Multiple *.yaml files found in {dir}, only 1 *.yaml file allowed'
+ assert len(files) == 1, f'Multiple *.yaml files found: {files}, only 1 *.yaml file allowed in {dir}'
+ return files[0]
+
+ def _unzip(self, path):
+ # Unzip data.zip
+ if not str(path).endswith('.zip'): # path is data.yaml
+ return False, None, path
+ assert Path(path).is_file(), f'Error unzipping {path}, file not found'
+ ZipFile(path).extractall(path=path.parent) # unzip
+ dir = path.with_suffix('') # dataset directory == zip name
+ assert dir.is_dir(), f'Error unzipping {path}, {dir} not found. path/to/abc.zip MUST unzip to path/to/abc/'
+ return True, str(dir), self._find_yaml(dir) # zipped, data_dir, yaml_path
+
+ def _hub_ops(self, f, max_dim=1920):
+ # HUB ops for 1 image 'f': resize and save at reduced quality in /dataset-hub for web/app viewing
+ f_new = self.im_dir / Path(f).name # dataset-hub image filename
+ try: # use PIL
+ im = Image.open(f)
+ r = max_dim / max(im.height, im.width) # ratio
+ if r < 1.0: # image too large
+ im = im.resize((int(im.width * r), int(im.height * r)))
+ im.save(f_new, 'JPEG', quality=50, optimize=True) # save
+ except Exception as e: # use OpenCV
+ print(f'WARNING: HUB ops PIL failure {f}: {e}')
+ im = cv2.imread(f)
+ im_height, im_width = im.shape[:2]
+ r = max_dim / max(im_height, im_width) # ratio
+ if r < 1.0: # image too large
+ im = cv2.resize(im, (int(im_width * r), int(im_height * r)), interpolation=cv2.INTER_AREA)
+ cv2.imwrite(str(f_new), im)
+
+ def get_json(self, save=False, verbose=False):
+ # Return dataset JSON for Ultralytics HUB
+ def _round(labels):
+ # Update labels to integer class and 6 decimal place floats
+ return [[int(c), *(round(x, 4) for x in points)] for c, *points in labels]
+
+ for split in 'train', 'val', 'test':
+ if self.data.get(split) is None:
+ self.stats[split] = None # i.e. no test set
+ continue
+ dataset = LoadImagesAndLabels(self.data[split]) # load dataset
+ x = np.array([
+ np.bincount(label[:, 0].astype(int), minlength=self.data['nc'])
+ for label in tqdm(dataset.labels, total=dataset.n, desc='Statistics')]) # shape(128x80)
+ self.stats[split] = {
+ 'instance_stats': {
+ 'total': int(x.sum()),
+ 'per_class': x.sum(0).tolist()},
+ 'image_stats': {
+ 'total': dataset.n,
+ 'unlabelled': int(np.all(x == 0, 1).sum()),
+ 'per_class': (x > 0).sum(0).tolist()},
+ 'labels': [{
+ str(Path(k).name): _round(v.tolist())} for k, v in zip(dataset.im_files, dataset.labels)]}
+
+ # Save, print and return
+ if save:
+ stats_path = self.hub_dir / 'stats.json'
+ print(f'Saving {stats_path.resolve()}...')
+ with open(stats_path, 'w') as f:
+ json.dump(self.stats, f) # save stats.json
+ if verbose:
+ print(json.dumps(self.stats, indent=2, sort_keys=False))
+ return self.stats
+
+ def process_images(self):
+ # Compress images for Ultralytics HUB
+ for split in 'train', 'val', 'test':
+ if self.data.get(split) is None:
+ continue
+ dataset = LoadImagesAndLabels(self.data[split]) # load dataset
+ desc = f'{split} images'
+ for _ in tqdm(ThreadPool(NUM_THREADS).imap(self._hub_ops, dataset.im_files), total=dataset.n, desc=desc):
+ pass
+ print(f'Done. All images saved to {self.im_dir}')
+ return self.im_dir
+
+
+# Classification dataloaders -------------------------------------------------------------------------------------------
+class ClassificationDataset(torchvision.datasets.ImageFolder):
+ """
+ YOLOv5 Classification Dataset.
+ Arguments
+ root: Dataset path
+ transform: torchvision transforms, used by default
+ album_transform: Albumentations transforms, used if installed
+ """
+
+ def __init__(self, root, augment, imgsz, cache=False):
+ super().__init__(root=root)
+ self.torch_transforms = classify_transforms(imgsz)
+ self.album_transforms = classify_albumentations(augment, imgsz) if augment else None
+ self.cache_ram = cache is True or cache == 'ram'
+ self.cache_disk = cache == 'disk'
+ self.samples = [list(x) + [Path(x[0]).with_suffix('.npy'), None] for x in self.samples] # file, index, npy, im
+
+ def __getitem__(self, i):
+ f, j, fn, im = self.samples[i] # filename, index, filename.with_suffix('.npy'), image
+ if self.album_transforms:
+ if self.cache_ram and im is None:
+ im = self.samples[i][3] = cv2.imread(f)
+ elif self.cache_disk:
+ if not fn.exists(): # load npy
+ np.save(fn.as_posix(), cv2.imread(f))
+ im = np.load(fn)
+ else: # read image
+ im = cv2.imread(f) # BGR
+ sample = self.album_transforms(image=cv2.cvtColor(im, cv2.COLOR_BGR2RGB))["image"]
+ else:
+ sample = self.torch_transforms(self.loader(f))
+ return sample, j
+
+
+def create_classification_dataloader(path,
+ imgsz=224,
+ batch_size=16,
+ augment=True,
+ cache=False,
+ rank=-1,
+ workers=8,
+ shuffle=True):
+ # Returns Dataloader object to be used with YOLOv5 Classifier
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = ClassificationDataset(root=path, imgsz=imgsz, augment=augment, cache=cache)
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count()
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers])
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ generator = torch.Generator()
+ generator.manual_seed(0)
+ return InfiniteDataLoader(dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ worker_init_fn=seed_worker,
+ generator=generator) # or DataLoader(persistent_workers=True)
diff --git a/ipex/seg/utils/docker/Dockerfile b/ipex/seg/utils/docker/Dockerfile
new file mode 100644
index 000000000..4b9367cc2
--- /dev/null
+++ b/ipex/seg/utils/docker/Dockerfile
@@ -0,0 +1,65 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is CUDA-optimized for YOLOv5 single/multi-GPU training and inference
+
+# Start FROM NVIDIA PyTorch image https://ngc.nvidia.com/catalog/containers/nvidia:pytorch
+FROM nvcr.io/nvidia/pytorch:22.07-py3
+RUN rm -rf /opt/pytorch # remove 1.2GB dir
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update && apt install --no-install-recommends -y zip htop screen libgl1-mesa-glx
+
+# Install pip packages
+COPY requirements.txt .
+RUN python -m pip install --upgrade pip wheel
+RUN pip uninstall -y Pillow torchtext torch torchvision
+RUN pip install --no-cache -r requirements.txt albumentations wandb gsutil notebook Pillow>=9.1.0 \
+ 'opencv-python<4.6.0.66' \
+ --extra-index-url https://download.pytorch.org/whl/cu113
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+# Set environment variables
+ENV OMP_NUM_THREADS=8
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest && sudo docker build -f utils/docker/Dockerfile -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all $t
+
+# Pull and Run with local directory access
+# t=ultralytics/yolov5:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all -v "$(pwd)"/datasets:/usr/src/datasets $t
+
+# Kill all
+# sudo docker kill $(sudo docker ps -q)
+
+# Kill all image-based
+# sudo docker kill $(sudo docker ps -qa --filter ancestor=ultralytics/yolov5:latest)
+
+# DockerHub tag update
+# t=ultralytics/yolov5:latest tnew=ultralytics/yolov5:v6.2 && sudo docker pull $t && sudo docker tag $t $tnew && sudo docker push $tnew
+
+# Clean up
+# docker system prune -a --volumes
+
+# Update Ubuntu drivers
+# https://www.maketecheasier.com/install-nvidia-drivers-ubuntu/
+
+# DDP test
+# python -m torch.distributed.run --nproc_per_node 2 --master_port 1 train.py --epochs 3
+
+# GCP VM from Image
+# docker.io/ultralytics/yolov5:latest
diff --git a/ipex/seg/utils/docker/Dockerfile-arm64 b/ipex/seg/utils/docker/Dockerfile-arm64
new file mode 100644
index 000000000..fe92c8d56
--- /dev/null
+++ b/ipex/seg/utils/docker/Dockerfile-arm64
@@ -0,0 +1,42 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest-arm64 image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is aarch64-compatible for Apple M1 and other ARM architectures i.e. Jetson Nano and Raspberry Pi
+
+# Start FROM Ubuntu image https://hub.docker.com/_/ubuntu
+FROM arm64v8/ubuntu:20.04
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update
+RUN DEBIAN_FRONTEND=noninteractive TZ=Etc/UTC apt install -y tzdata
+RUN apt install --no-install-recommends -y python3-pip git zip curl htop gcc \
+ libgl1-mesa-glx libglib2.0-0 libpython3.8-dev
+# RUN alias python=python3
+
+# Install pip packages
+COPY requirements.txt .
+RUN python3 -m pip install --upgrade pip wheel
+RUN pip install --no-cache -r requirements.txt gsutil notebook \
+ tensorflow-aarch64
+ # tensorflowjs \
+ # onnx onnx-simplifier onnxruntime \
+ # coremltools openvino-dev \
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest-M1 && sudo docker build --platform linux/arm64 -f utils/docker/Dockerfile-arm64 -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest-M1 && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
diff --git a/ipex/seg/utils/docker/Dockerfile-cpu b/ipex/seg/utils/docker/Dockerfile-cpu
new file mode 100644
index 000000000..d6fac645d
--- /dev/null
+++ b/ipex/seg/utils/docker/Dockerfile-cpu
@@ -0,0 +1,40 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest-cpu image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is CPU-optimized for ONNX, OpenVINO and PyTorch YOLOv5 deployments
+
+# Start FROM Ubuntu image https://hub.docker.com/_/ubuntu
+FROM ubuntu:20.04
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update
+RUN DEBIAN_FRONTEND=noninteractive TZ=Etc/UTC apt install -y tzdata
+RUN apt install --no-install-recommends -y python3-pip git zip curl htop libgl1-mesa-glx libglib2.0-0 libpython3-dev
+# RUN alias python=python3
+
+# Install pip packages
+COPY requirements.txt .
+RUN python3 -m pip install --upgrade pip wheel
+RUN pip install --no-cache -r requirements.txt albumentations gsutil notebook \
+ coremltools onnx onnx-simplifier onnxruntime tensorflow-cpu tensorflowjs \
+ # openvino-dev \
+ --extra-index-url https://download.pytorch.org/whl/cpu
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest-cpu && sudo docker build -f utils/docker/Dockerfile-cpu -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest-cpu && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
diff --git a/ipex/seg/utils/downloads.py b/ipex/seg/utils/downloads.py
new file mode 100644
index 000000000..69887a579
--- /dev/null
+++ b/ipex/seg/utils/downloads.py
@@ -0,0 +1,180 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Download utils
+"""
+
+import logging
+import os
+import platform
+import subprocess
+import time
+import urllib
+from pathlib import Path
+from zipfile import ZipFile
+
+import requests
+import torch
+
+
+def is_url(url, check_online=True):
+ # Check if online file exists
+ try:
+ url = str(url)
+ result = urllib.parse.urlparse(url)
+ assert all([result.scheme, result.netloc, result.path]) # check if is url
+ return (urllib.request.urlopen(url).getcode() == 200) if check_online else True # check if exists online
+ except (AssertionError, urllib.request.HTTPError):
+ return False
+
+
+def gsutil_getsize(url=''):
+ # gs://bucket/file size https://cloud.google.com/storage/docs/gsutil/commands/du
+ s = subprocess.check_output(f'gsutil du {url}', shell=True).decode('utf-8')
+ return eval(s.split(' ')[0]) if len(s) else 0 # bytes
+
+
+def safe_download(file, url, url2=None, min_bytes=1E0, error_msg=''):
+ # Attempts to download file from url or url2, checks and removes incomplete downloads < min_bytes
+ from utils.general import LOGGER
+
+ file = Path(file)
+ assert_msg = f"Downloaded file '{file}' does not exist or size is < min_bytes={min_bytes}"
+ try: # url1
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, str(file), progress=LOGGER.level <= logging.INFO)
+ assert file.exists() and file.stat().st_size > min_bytes, assert_msg # check
+ except Exception as e: # url2
+ file.unlink(missing_ok=True) # remove partial downloads
+ LOGGER.info(f'ERROR: {e}\nRe-attempting {url2 or url} to {file}...')
+ os.system(f"curl -# -L '{url2 or url}' -o '{file}' --retry 3 -C -") # curl download, retry and resume on fail
+ finally:
+ if not file.exists() or file.stat().st_size < min_bytes: # check
+ file.unlink(missing_ok=True) # remove partial downloads
+ LOGGER.info(f"ERROR: {assert_msg}\n{error_msg}")
+ LOGGER.info('')
+
+
+def attempt_download(file, repo='ultralytics/yolov5', release='v6.2'):
+ # Attempt file download from GitHub release assets if not found locally. release = 'latest', 'v6.2', etc.
+ from utils.general import LOGGER
+
+ def github_assets(repository, version='latest'):
+ # Return GitHub repo tag (i.e. 'v6.2') and assets (i.e. ['yolov5s.pt', 'yolov5m.pt', ...])
+ if version != 'latest':
+ version = f'tags/{version}' # i.e. tags/v6.2
+ response = requests.get(f'https://api.github.com/repos/{repository}/releases/{version}').json() # github api
+ return response['tag_name'], [x['name'] for x in response['assets']] # tag, assets
+
+ file = Path(str(file).strip().replace("'", ''))
+ if not file.exists():
+ # URL specified
+ name = Path(urllib.parse.unquote(str(file))).name # decode '%2F' to '/' etc.
+ if str(file).startswith(('http:/', 'https:/')): # download
+ url = str(file).replace(':/', '://') # Pathlib turns :// -> :/
+ file = name.split('?')[0] # parse authentication https://url.com/file.txt?auth...
+ if Path(file).is_file():
+ LOGGER.info(f'Found {url} locally at {file}') # file already exists
+ else:
+ safe_download(file=file, url=url, min_bytes=1E5)
+ return file
+
+ # GitHub assets
+ assets = [
+ 'yolov5n.pt', 'yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt', 'yolov5n6.pt', 'yolov5s6.pt',
+ 'yolov5m6.pt', 'yolov5l6.pt', 'yolov5x6.pt']
+ try:
+ tag, assets = github_assets(repo, release)
+ except Exception:
+ try:
+ tag, assets = github_assets(repo) # latest release
+ except Exception:
+ try:
+ tag = subprocess.check_output('git tag', shell=True, stderr=subprocess.STDOUT).decode().split()[-1]
+ except Exception:
+ tag = release
+
+ file.parent.mkdir(parents=True, exist_ok=True) # make parent dir (if required)
+ if name in assets:
+ url3 = 'https://drive.google.com/drive/folders/1EFQTEUeXWSFww0luse2jB9M1QNZQGwNl' # backup gdrive mirror
+ safe_download(
+ file,
+ url=f'https://github.com/{repo}/releases/download/{tag}/{name}',
+ url2=f'https://storage.googleapis.com/{repo}/{tag}/{name}', # backup url (optional)
+ min_bytes=1E5,
+ error_msg=f'{file} missing, try downloading from https://github.com/{repo}/releases/{tag} or {url3}')
+
+ return str(file)
+
+
+def gdrive_download(id='16TiPfZj7htmTyhntwcZyEEAejOUxuT6m', file='tmp.zip'):
+ # Downloads a file from Google Drive. from yolov5.utils.downloads import *; gdrive_download()
+ t = time.time()
+ file = Path(file)
+ cookie = Path('cookie') # gdrive cookie
+ print(f'Downloading https://drive.google.com/uc?export=download&id={id} as {file}... ', end='')
+ file.unlink(missing_ok=True) # remove existing file
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Attempt file download
+ out = "NUL" if platform.system() == "Windows" else "/dev/null"
+ os.system(f'curl -c ./cookie -s -L "drive.google.com/uc?export=download&id={id}" > {out}')
+ if os.path.exists('cookie'): # large file
+ s = f'curl -Lb ./cookie "drive.google.com/uc?export=download&confirm={get_token()}&id={id}" -o {file}'
+ else: # small file
+ s = f'curl -s -L -o {file} "drive.google.com/uc?export=download&id={id}"'
+ r = os.system(s) # execute, capture return
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Error check
+ if r != 0:
+ file.unlink(missing_ok=True) # remove partial
+ print('Download error ') # raise Exception('Download error')
+ return r
+
+ # Unzip if archive
+ if file.suffix == '.zip':
+ print('unzipping... ', end='')
+ ZipFile(file).extractall(path=file.parent) # unzip
+ file.unlink() # remove zip
+
+ print(f'Done ({time.time() - t:.1f}s)')
+ return r
+
+
+def get_token(cookie="./cookie"):
+ with open(cookie) as f:
+ for line in f:
+ if "download" in line:
+ return line.split()[-1]
+ return ""
+
+
+# Google utils: https://cloud.google.com/storage/docs/reference/libraries ----------------------------------------------
+#
+#
+# def upload_blob(bucket_name, source_file_name, destination_blob_name):
+# # Uploads a file to a bucket
+# # https://cloud.google.com/storage/docs/uploading-objects#storage-upload-object-python
+#
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(destination_blob_name)
+#
+# blob.upload_from_filename(source_file_name)
+#
+# print('File {} uploaded to {}.'.format(
+# source_file_name,
+# destination_blob_name))
+#
+#
+# def download_blob(bucket_name, source_blob_name, destination_file_name):
+# # Uploads a blob from a bucket
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(source_blob_name)
+#
+# blob.download_to_filename(destination_file_name)
+#
+# print('Blob {} downloaded to {}.'.format(
+# source_blob_name,
+# destination_file_name))
diff --git a/ipex/seg/utils/flask_rest_api/README.md b/ipex/seg/utils/flask_rest_api/README.md
new file mode 100644
index 000000000..a726acbd9
--- /dev/null
+++ b/ipex/seg/utils/flask_rest_api/README.md
@@ -0,0 +1,73 @@
+# Flask REST API
+
+[REST](https://en.wikipedia.org/wiki/Representational_state_transfer) [API](https://en.wikipedia.org/wiki/API)s are
+commonly used to expose Machine Learning (ML) models to other services. This folder contains an example REST API
+created using Flask to expose the YOLOv5s model from [PyTorch Hub](https://pytorch.org/hub/ultralytics_yolov5/).
+
+## Requirements
+
+[Flask](https://palletsprojects.com/p/flask/) is required. Install with:
+
+```shell
+$ pip install Flask
+```
+
+## Run
+
+After Flask installation run:
+
+```shell
+$ python3 restapi.py --port 5000
+```
+
+Then use [curl](https://curl.se/) to perform a request:
+
+```shell
+$ curl -X POST -F image=@zidane.jpg 'http://localhost:5000/v1/object-detection/yolov5s'
+```
+
+The model inference results are returned as a JSON response:
+
+```json
+[
+ {
+ "class": 0,
+ "confidence": 0.8900438547,
+ "height": 0.9318675399,
+ "name": "person",
+ "width": 0.3264600933,
+ "xcenter": 0.7438579798,
+ "ycenter": 0.5207948685
+ },
+ {
+ "class": 0,
+ "confidence": 0.8440024257,
+ "height": 0.7155083418,
+ "name": "person",
+ "width": 0.6546785235,
+ "xcenter": 0.427829951,
+ "ycenter": 0.6334488392
+ },
+ {
+ "class": 27,
+ "confidence": 0.3771208823,
+ "height": 0.3902671337,
+ "name": "tie",
+ "width": 0.0696444362,
+ "xcenter": 0.3675483763,
+ "ycenter": 0.7991207838
+ },
+ {
+ "class": 27,
+ "confidence": 0.3527112305,
+ "height": 0.1540903747,
+ "name": "tie",
+ "width": 0.0336618312,
+ "xcenter": 0.7814827561,
+ "ycenter": 0.5065554976
+ }
+]
+```
+
+An example python script to perform inference using [requests](https://docs.python-requests.org/en/master/) is given
+in `example_request.py`
diff --git a/ipex/seg/utils/flask_rest_api/example_request.py b/ipex/seg/utils/flask_rest_api/example_request.py
new file mode 100644
index 000000000..773ad8932
--- /dev/null
+++ b/ipex/seg/utils/flask_rest_api/example_request.py
@@ -0,0 +1,19 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Perform test request
+"""
+
+import pprint
+
+import requests
+
+DETECTION_URL = "http://localhost:5000/v1/object-detection/yolov5s"
+IMAGE = "zidane.jpg"
+
+# Read image
+with open(IMAGE, "rb") as f:
+ image_data = f.read()
+
+response = requests.post(DETECTION_URL, files={"image": image_data}).json()
+
+pprint.pprint(response)
diff --git a/ipex/seg/utils/flask_rest_api/restapi.py b/ipex/seg/utils/flask_rest_api/restapi.py
new file mode 100644
index 000000000..8482435c8
--- /dev/null
+++ b/ipex/seg/utils/flask_rest_api/restapi.py
@@ -0,0 +1,48 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run a Flask REST API exposing one or more YOLOv5s models
+"""
+
+import argparse
+import io
+
+import torch
+from flask import Flask, request
+from PIL import Image
+
+app = Flask(__name__)
+models = {}
+
+DETECTION_URL = "/v1/object-detection/"
+
+
+@app.route(DETECTION_URL, methods=["POST"])
+def predict(model):
+ if request.method != "POST":
+ return
+
+ if request.files.get("image"):
+ # Method 1
+ # with request.files["image"] as f:
+ # im = Image.open(io.BytesIO(f.read()))
+
+ # Method 2
+ im_file = request.files["image"]
+ im_bytes = im_file.read()
+ im = Image.open(io.BytesIO(im_bytes))
+
+ if model in models:
+ results = models[model](im, size=640) # reduce size=320 for faster inference
+ return results.pandas().xyxy[0].to_json(orient="records")
+
+
+if __name__ == "__main__":
+ parser = argparse.ArgumentParser(description="Flask API exposing YOLOv5 model")
+ parser.add_argument("--port", default=5000, type=int, help="port number")
+ parser.add_argument('--model', nargs='+', default=['yolov5s'], help='model(s) to run, i.e. --model yolov5n yolov5s')
+ opt = parser.parse_args()
+
+ for m in opt.model:
+ models[m] = torch.hub.load("ultralytics/yolov5", m, force_reload=True, skip_validation=True)
+
+ app.run(host="0.0.0.0", port=opt.port) # debug=True causes Restarting with stat
diff --git a/ipex/seg/utils/general.py b/ipex/seg/utils/general.py
new file mode 100644
index 000000000..d336ba91b
--- /dev/null
+++ b/ipex/seg/utils/general.py
@@ -0,0 +1,1054 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+General utils
+"""
+
+import contextlib
+import glob
+import inspect
+import logging
+import math
+import os
+import platform
+import random
+import re
+import shutil
+import signal
+import sys
+import time
+import urllib
+from datetime import datetime
+from itertools import repeat
+from multiprocessing.pool import ThreadPool
+from pathlib import Path
+from subprocess import check_output
+from typing import Optional
+from zipfile import ZipFile
+
+import cv2
+import numpy as np
+import pandas as pd
+import pkg_resources as pkg
+import torch
+import torchvision
+import yaml
+
+from utils import TryExcept
+from utils.downloads import gsutil_getsize
+from utils.metrics import box_iou, fitness
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+RANK = int(os.getenv('RANK', -1))
+
+# Settings
+DATASETS_DIR = ROOT.parent / 'datasets' # YOLOv5 datasets directory
+NUM_THREADS = min(8, max(1, os.cpu_count() - 1)) # number of YOLOv5 multiprocessing threads
+AUTOINSTALL = str(os.getenv('YOLOv5_AUTOINSTALL', True)).lower() == 'true' # global auto-install mode
+VERBOSE = str(os.getenv('YOLOv5_VERBOSE', True)).lower() == 'true' # global verbose mode
+FONT = 'Arial.ttf' # https://ultralytics.com/assets/Arial.ttf
+
+torch.set_printoptions(linewidth=320, precision=5, profile='long')
+np.set_printoptions(linewidth=320, formatter={'float_kind': '{:11.5g}'.format}) # format short g, %precision=5
+pd.options.display.max_columns = 10
+cv2.setNumThreads(0) # prevent OpenCV from multithreading (incompatible with PyTorch DataLoader)
+os.environ['NUMEXPR_MAX_THREADS'] = str(NUM_THREADS) # NumExpr max threads
+os.environ['OMP_NUM_THREADS'] = '1' if platform.system() == 'darwin' else str(NUM_THREADS) # OpenMP (PyTorch and SciPy)
+
+
+def is_ascii(s=''):
+ # Is string composed of all ASCII (no UTF) characters? (note str().isascii() introduced in python 3.7)
+ s = str(s) # convert list, tuple, None, etc. to str
+ return len(s.encode().decode('ascii', 'ignore')) == len(s)
+
+
+def is_chinese(s='人工智能'):
+ # Is string composed of any Chinese characters?
+ return bool(re.search('[\u4e00-\u9fff]', str(s)))
+
+
+def is_colab():
+ # Is environment a Google Colab instance?
+ return 'COLAB_GPU' in os.environ
+
+
+def is_kaggle():
+ # Is environment a Kaggle Notebook?
+ return os.environ.get('PWD') == '/kaggle/working' and os.environ.get('KAGGLE_URL_BASE') == 'https://www.kaggle.com'
+
+
+def is_docker() -> bool:
+ """Check if the process runs inside a docker container."""
+ if Path("/.dockerenv").exists():
+ return True
+ try: # check if docker is in control groups
+ with open("/proc/self/cgroup") as file:
+ return any("docker" in line for line in file)
+ except OSError:
+ return False
+
+
+def is_writeable(dir, test=False):
+ # Return True if directory has write permissions, test opening a file with write permissions if test=True
+ if not test:
+ return os.access(dir, os.W_OK) # possible issues on Windows
+ file = Path(dir) / 'tmp.txt'
+ try:
+ with open(file, 'w'): # open file with write permissions
+ pass
+ file.unlink() # remove file
+ return True
+ except OSError:
+ return False
+
+
+def set_logging(name=None, verbose=VERBOSE):
+ # Sets level and returns logger
+ if is_kaggle() or is_colab():
+ for h in logging.root.handlers:
+ logging.root.removeHandler(h) # remove all handlers associated with the root logger object
+ rank = int(os.getenv('RANK', -1)) # rank in world for Multi-GPU trainings
+ level = logging.INFO if verbose and rank in {-1, 0} else logging.ERROR
+ log = logging.getLogger(name)
+ log.setLevel(level)
+ handler = logging.StreamHandler()
+ handler.setFormatter(logging.Formatter("%(message)s"))
+ handler.setLevel(level)
+ log.addHandler(handler)
+
+
+set_logging() # run before defining LOGGER
+LOGGER = logging.getLogger("yolov5") # define globally (used in train.py, val.py, detect.py, etc.)
+if platform.system() == 'Windows':
+ for fn in LOGGER.info, LOGGER.warning:
+ setattr(LOGGER, fn.__name__, lambda x: fn(emojis(x))) # emoji safe logging
+
+
+def user_config_dir(dir='Ultralytics', env_var='YOLOV5_CONFIG_DIR'):
+ # Return path of user configuration directory. Prefer environment variable if exists. Make dir if required.
+ env = os.getenv(env_var)
+ if env:
+ path = Path(env) # use environment variable
+ else:
+ cfg = {'Windows': 'AppData/Roaming', 'Linux': '.config', 'Darwin': 'Library/Application Support'} # 3 OS dirs
+ path = Path.home() / cfg.get(platform.system(), '') # OS-specific config dir
+ path = (path if is_writeable(path) else Path('/tmp')) / dir # GCP and AWS lambda fix, only /tmp is writeable
+ path.mkdir(exist_ok=True) # make if required
+ return path
+
+
+CONFIG_DIR = user_config_dir() # Ultralytics settings dir
+
+
+class Profile(contextlib.ContextDecorator):
+ # YOLOv5 Profile class. Usage: @Profile() decorator or 'with Profile():' context manager
+ def __init__(self, t=0.0):
+ self.t = t
+ self.cuda = torch.cuda.is_available()
+
+ def __enter__(self):
+ self.start = self.time()
+ return self
+
+ def __exit__(self, type, value, traceback):
+ self.dt = self.time() - self.start # delta-time
+ self.t += self.dt # accumulate dt
+
+ def time(self):
+ if self.cuda:
+ torch.cuda.synchronize()
+ return time.time()
+
+
+class Timeout(contextlib.ContextDecorator):
+ # YOLOv5 Timeout class. Usage: @Timeout(seconds) decorator or 'with Timeout(seconds):' context manager
+ def __init__(self, seconds, *, timeout_msg='', suppress_timeout_errors=True):
+ self.seconds = int(seconds)
+ self.timeout_message = timeout_msg
+ self.suppress = bool(suppress_timeout_errors)
+
+ def _timeout_handler(self, signum, frame):
+ raise TimeoutError(self.timeout_message)
+
+ def __enter__(self):
+ if platform.system() != 'Windows': # not supported on Windows
+ signal.signal(signal.SIGALRM, self._timeout_handler) # Set handler for SIGALRM
+ signal.alarm(self.seconds) # start countdown for SIGALRM to be raised
+
+ def __exit__(self, exc_type, exc_val, exc_tb):
+ if platform.system() != 'Windows':
+ signal.alarm(0) # Cancel SIGALRM if it's scheduled
+ if self.suppress and exc_type is TimeoutError: # Suppress TimeoutError
+ return True
+
+
+class WorkingDirectory(contextlib.ContextDecorator):
+ # Usage: @WorkingDirectory(dir) decorator or 'with WorkingDirectory(dir):' context manager
+ def __init__(self, new_dir):
+ self.dir = new_dir # new dir
+ self.cwd = Path.cwd().resolve() # current dir
+
+ def __enter__(self):
+ os.chdir(self.dir)
+
+ def __exit__(self, exc_type, exc_val, exc_tb):
+ os.chdir(self.cwd)
+
+
+def methods(instance):
+ # Get class/instance methods
+ return [f for f in dir(instance) if callable(getattr(instance, f)) and not f.startswith("__")]
+
+
+def print_args(args: Optional[dict] = None, show_file=True, show_func=False):
+ # Print function arguments (optional args dict)
+ x = inspect.currentframe().f_back # previous frame
+ file, _, func, _, _ = inspect.getframeinfo(x)
+ if args is None: # get args automatically
+ args, _, _, frm = inspect.getargvalues(x)
+ args = {k: v for k, v in frm.items() if k in args}
+ try:
+ file = Path(file).resolve().relative_to(ROOT).with_suffix('')
+ except ValueError:
+ file = Path(file).stem
+ s = (f'{file}: ' if show_file else '') + (f'{func}: ' if show_func else '')
+ LOGGER.info(colorstr(s) + ', '.join(f'{k}={v}' for k, v in args.items()))
+
+
+def init_seeds(seed=0, deterministic=False):
+ # Initialize random number generator (RNG) seeds https://pytorch.org/docs/stable/notes/randomness.html
+ # cudnn seed 0 settings are slower and more reproducible, else faster and less reproducible
+ import torch.backends.cudnn as cudnn
+
+ if deterministic and check_version(torch.__version__, '1.12.0'): # https://github.com/ultralytics/yolov5/pull/8213
+ torch.use_deterministic_algorithms(True)
+ os.environ['CUBLAS_WORKSPACE_CONFIG'] = ':4096:8'
+ os.environ['PYTHONHASHSEED'] = str(seed)
+
+ random.seed(seed)
+ np.random.seed(seed)
+ torch.manual_seed(seed)
+ cudnn.benchmark, cudnn.deterministic = (False, True) if seed == 0 else (True, False)
+ torch.cuda.manual_seed(seed)
+ torch.cuda.manual_seed_all(seed) # for Multi-GPU, exception safe
+
+
+def intersect_dicts(da, db, exclude=()):
+ # Dictionary intersection of matching keys and shapes, omitting 'exclude' keys, using da values
+ return {k: v for k, v in da.items() if k in db and all(x not in k for x in exclude) and v.shape == db[k].shape}
+
+
+def get_default_args(func):
+ # Get func() default arguments
+ signature = inspect.signature(func)
+ return {k: v.default for k, v in signature.parameters.items() if v.default is not inspect.Parameter.empty}
+
+
+def get_latest_run(search_dir='.'):
+ # Return path to most recent 'last.pt' in /runs (i.e. to --resume from)
+ last_list = glob.glob(f'{search_dir}/**/last*.pt', recursive=True)
+ return max(last_list, key=os.path.getctime) if last_list else ''
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+def file_age(path=__file__):
+ # Return days since last file update
+ dt = (datetime.now() - datetime.fromtimestamp(Path(path).stat().st_mtime)) # delta
+ return dt.days # + dt.seconds / 86400 # fractional days
+
+
+def file_date(path=__file__):
+ # Return human-readable file modification date, i.e. '2021-3-26'
+ t = datetime.fromtimestamp(Path(path).stat().st_mtime)
+ return f'{t.year}-{t.month}-{t.day}'
+
+
+def file_size(path):
+ # Return file/dir size (MB)
+ mb = 1 << 20 # bytes to MiB (1024 ** 2)
+ path = Path(path)
+ if path.is_file():
+ return path.stat().st_size / mb
+ elif path.is_dir():
+ return sum(f.stat().st_size for f in path.glob('**/*') if f.is_file()) / mb
+ else:
+ return 0.0
+
+
+def check_online():
+ # Check internet connectivity
+ import socket
+ try:
+ socket.create_connection(("1.1.1.1", 443), 5) # check host accessibility
+ return True
+ except OSError:
+ return False
+
+
+def git_describe(path=ROOT): # path must be a directory
+ # Return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
+ try:
+ assert (Path(path) / '.git').is_dir()
+ return check_output(f'git -C {path} describe --tags --long --always', shell=True).decode()[:-1]
+ except Exception:
+ return ''
+
+
+@TryExcept()
+@WorkingDirectory(ROOT)
+def check_git_status(repo='ultralytics/yolov5'):
+ # YOLOv5 status check, recommend 'git pull' if code is out of date
+ url = f'https://github.com/{repo}'
+ msg = f', for updates see {url}'
+ s = colorstr('github: ') # string
+ assert Path('.git').exists(), s + 'skipping check (not a git repository)' + msg
+ assert check_online(), s + 'skipping check (offline)' + msg
+
+ splits = re.split(pattern=r'\s', string=check_output('git remote -v', shell=True).decode())
+ matches = [repo in s for s in splits]
+ if any(matches):
+ remote = splits[matches.index(True) - 1]
+ else:
+ remote = 'ultralytics'
+ check_output(f'git remote add {remote} {url}', shell=True)
+ check_output(f'git fetch {remote}', shell=True, timeout=5) # git fetch
+ branch = check_output('git rev-parse --abbrev-ref HEAD', shell=True).decode().strip() # checked out
+ n = int(check_output(f'git rev-list {branch}..{remote}/master --count', shell=True)) # commits behind
+ if n > 0:
+ pull = 'git pull' if remote == 'origin' else f'git pull {remote} master'
+ s += f"⚠️ YOLOv5 is out of date by {n} commit{'s' * (n > 1)}. Use `{pull}` or `git clone {url}` to update."
+ else:
+ s += f'up to date with {url} ✅'
+ LOGGER.info(s)
+
+
+def check_python(minimum='3.7.0'):
+ # Check current python version vs. required python version
+ check_version(platform.python_version(), minimum, name='Python ', hard=True)
+
+
+def check_version(current='0.0.0', minimum='0.0.0', name='version ', pinned=False, hard=False, verbose=False):
+ # Check version vs. required version
+ current, minimum = (pkg.parse_version(x) for x in (current, minimum))
+ result = (current == minimum) if pinned else (current >= minimum) # bool
+ s = f'{name}{minimum} required by YOLOv5, but {name}{current} is currently installed' # string
+ if hard:
+ assert result, s # assert min requirements met
+ if verbose and not result:
+ LOGGER.warning(s)
+ return result
+
+
+@TryExcept()
+def check_requirements(requirements=ROOT / 'requirements.txt', exclude=(), install=True, cmds=()):
+ # Check installed dependencies meet YOLOv5 requirements (pass *.txt file or list of packages)
+ prefix = colorstr('red', 'bold', 'requirements:')
+ check_python() # check python version
+ if isinstance(requirements, (str, Path)): # requirements.txt file
+ file = Path(requirements)
+ assert file.exists(), f"{prefix} {file.resolve()} not found, check failed."
+ with file.open() as f:
+ requirements = [f'{x.name}{x.specifier}' for x in pkg.parse_requirements(f) if x.name not in exclude]
+ else: # list or tuple of packages
+ requirements = [x for x in requirements if x not in exclude]
+
+ n = 0 # number of packages updates
+ for i, r in enumerate(requirements):
+ try:
+ pkg.require(r)
+ except Exception: # DistributionNotFound or VersionConflict if requirements not met
+ s = f"{prefix} {r} not found and is required by YOLOv5"
+ if install and AUTOINSTALL: # check environment variable
+ LOGGER.info(f"{s}, attempting auto-update...")
+ try:
+ assert check_online(), f"'pip install {r}' skipped (offline)"
+ LOGGER.info(check_output(f'pip install "{r}" {cmds[i] if cmds else ""}', shell=True).decode())
+ n += 1
+ except Exception as e:
+ LOGGER.warning(f'{prefix} {e}')
+ else:
+ LOGGER.info(f'{s}. Please install and rerun your command.')
+
+ if n: # if packages updated
+ source = file.resolve() if 'file' in locals() else requirements
+ s = f"{prefix} {n} package{'s' * (n > 1)} updated per {source}\n" \
+ f"{prefix} ⚠️ {colorstr('bold', 'Restart runtime or rerun command for updates to take effect')}\n"
+ LOGGER.info(s)
+
+
+def check_img_size(imgsz, s=32, floor=0):
+ # Verify image size is a multiple of stride s in each dimension
+ if isinstance(imgsz, int): # integer i.e. img_size=640
+ new_size = max(make_divisible(imgsz, int(s)), floor)
+ else: # list i.e. img_size=[640, 480]
+ imgsz = list(imgsz) # convert to list if tuple
+ new_size = [max(make_divisible(x, int(s)), floor) for x in imgsz]
+ if new_size != imgsz:
+ LOGGER.warning(f'WARNING: --img-size {imgsz} must be multiple of max stride {s}, updating to {new_size}')
+ return new_size
+
+
+def check_imshow():
+ # Check if environment supports image displays
+ try:
+ assert not is_docker(), 'cv2.imshow() is disabled in Docker environments'
+ assert not is_colab(), 'cv2.imshow() is disabled in Google Colab environments'
+ cv2.imshow('test', np.zeros((1, 1, 3)))
+ cv2.waitKey(1)
+ cv2.destroyAllWindows()
+ cv2.waitKey(1)
+ return True
+ except Exception as e:
+ LOGGER.warning(f'WARNING: Environment does not support cv2.imshow() or PIL Image.show() image displays\n{e}')
+ return False
+
+
+def check_suffix(file='yolov5s.pt', suffix=('.pt',), msg=''):
+ # Check file(s) for acceptable suffix
+ if file and suffix:
+ if isinstance(suffix, str):
+ suffix = [suffix]
+ for f in file if isinstance(file, (list, tuple)) else [file]:
+ s = Path(f).suffix.lower() # file suffix
+ if len(s):
+ assert s in suffix, f"{msg}{f} acceptable suffix is {suffix}"
+
+
+def check_yaml(file, suffix=('.yaml', '.yml')):
+ # Search/download YAML file (if necessary) and return path, checking suffix
+ return check_file(file, suffix)
+
+
+def check_file(file, suffix=''):
+ # Search/download file (if necessary) and return path
+ check_suffix(file, suffix) # optional
+ file = str(file) # convert to str()
+ if Path(file).is_file() or not file: # exists
+ return file
+ elif file.startswith(('http:/', 'https:/')): # download
+ url = file # warning: Pathlib turns :// -> :/
+ file = Path(urllib.parse.unquote(file).split('?')[0]).name # '%2F' to '/', split https://url.com/file.txt?auth
+ if Path(file).is_file():
+ LOGGER.info(f'Found {url} locally at {file}') # file already exists
+ else:
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, file)
+ assert Path(file).exists() and Path(file).stat().st_size > 0, f'File download failed: {url}' # check
+ return file
+ elif file.startswith('clearml://'): # ClearML Dataset ID
+ assert 'clearml' in sys.modules, "ClearML is not installed, so cannot use ClearML dataset. Try running 'pip install clearml'."
+ return file
+ else: # search
+ files = []
+ for d in 'data', 'models', 'utils': # search directories
+ files.extend(glob.glob(str(ROOT / d / '**' / file), recursive=True)) # find file
+ assert len(files), f'File not found: {file}' # assert file was found
+ assert len(files) == 1, f"Multiple files match '{file}', specify exact path: {files}" # assert unique
+ return files[0] # return file
+
+
+def check_font(font=FONT, progress=False):
+ # Download font to CONFIG_DIR if necessary
+ font = Path(font)
+ file = CONFIG_DIR / font.name
+ if not font.exists() and not file.exists():
+ url = "https://ultralytics.com/assets/" + font.name
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, str(file), progress=progress)
+
+
+def check_dataset(data, autodownload=True):
+ # Download, check and/or unzip dataset if not found locally
+
+ # Download (optional)
+ extract_dir = ''
+ if isinstance(data, (str, Path)) and str(data).endswith('.zip'): # i.e. gs://bucket/dir/coco128.zip
+ download(data, dir=f'{DATASETS_DIR}/{Path(data).stem}', unzip=True, delete=False, curl=False, threads=1)
+ data = next((DATASETS_DIR / Path(data).stem).rglob('*.yaml'))
+ extract_dir, autodownload = data.parent, False
+
+ # Read yaml (optional)
+ if isinstance(data, (str, Path)):
+ with open(data, errors='ignore') as f:
+ data = yaml.safe_load(f) # dictionary
+
+ # Checks
+ for k in 'train', 'val', 'names':
+ assert k in data, f"data.yaml '{k}:' field missing ❌"
+ if isinstance(data['names'], (list, tuple)): # old array format
+ data['names'] = dict(enumerate(data['names'])) # convert to dict
+ data['nc'] = len(data['names'])
+
+ # Resolve paths
+ path = Path(extract_dir or data.get('path') or '') # optional 'path' default to '.'
+ if not path.is_absolute():
+ path = (ROOT / path).resolve()
+ for k in 'train', 'val', 'test':
+ if data.get(k): # prepend path
+ data[k] = str(path / data[k]) if isinstance(data[k], str) else [str(path / x) for x in data[k]]
+
+ # Parse yaml
+ train, val, test, s = (data.get(x) for x in ('train', 'val', 'test', 'download'))
+ if val:
+ val = [Path(x).resolve() for x in (val if isinstance(val, list) else [val])] # val path
+ if not all(x.exists() for x in val):
+ LOGGER.info('\nDataset not found ⚠️, missing paths %s' % [str(x) for x in val if not x.exists()])
+ if not s or not autodownload:
+ raise Exception('Dataset not found ❌')
+ t = time.time()
+ root = path.parent if 'path' in data else '..' # unzip directory i.e. '../'
+ if s.startswith('http') and s.endswith('.zip'): # URL
+ f = Path(s).name # filename
+ LOGGER.info(f'Downloading {s} to {f}...')
+ torch.hub.download_url_to_file(s, f)
+ Path(root).mkdir(parents=True, exist_ok=True) # create root
+ ZipFile(f).extractall(path=root) # unzip
+ Path(f).unlink() # remove zip
+ r = None # success
+ elif s.startswith('bash '): # bash script
+ LOGGER.info(f'Running {s} ...')
+ r = os.system(s)
+ else: # python script
+ r = exec(s, {'yaml': data}) # return None
+ dt = f'({round(time.time() - t, 1)}s)'
+ s = f"success ✅ {dt}, saved to {colorstr('bold', root)}" if r in (0, None) else f"failure {dt} ❌"
+ LOGGER.info(f"Dataset download {s}")
+ check_font('Arial.ttf' if is_ascii(data['names']) else 'Arial.Unicode.ttf', progress=True) # download fonts
+ return data # dictionary
+
+
+def check_amp(model):
+ # Check PyTorch Automatic Mixed Precision (AMP) functionality. Return True on correct operation
+ from models.common import AutoShape, DetectMultiBackend
+
+ def amp_allclose(model, im):
+ # All close FP32 vs AMP results
+ m = AutoShape(model, verbose=False) # model
+ a = m(im).xywhn[0] # FP32 inference
+ m.amp = True
+ b = m(im).xywhn[0] # AMP inference
+ return a.shape == b.shape and torch.allclose(a, b, atol=0.1) # close to 10% absolute tolerance
+
+ prefix = colorstr('AMP: ')
+ device = next(model.parameters()).device # get model device
+ if device.type == 'cpu':
+ return False # AMP disabled on CPU
+ f = ROOT / 'data' / 'images' / 'bus.jpg' # image to check
+ im = f if f.exists() else 'https://ultralytics.com/images/bus.jpg' if check_online() else np.ones((640, 640, 3))
+ try:
+ assert amp_allclose(model, im) or amp_allclose(DetectMultiBackend('yolov5n.pt', device), im)
+ LOGGER.info(f'{prefix}checks passed ✅')
+ return True
+ except Exception:
+ help_url = 'https://github.com/ultralytics/yolov5/issues/7908'
+ LOGGER.warning(f'{prefix}checks failed ❌, disabling Automatic Mixed Precision. See {help_url}')
+ return False
+
+
+def yaml_load(file='data.yaml'):
+ # Single-line safe yaml loading
+ with open(file, errors='ignore') as f:
+ return yaml.safe_load(f)
+
+
+def yaml_save(file='data.yaml', data={}):
+ # Single-line safe yaml saving
+ with open(file, 'w') as f:
+ yaml.safe_dump({k: str(v) if isinstance(v, Path) else v for k, v in data.items()}, f, sort_keys=False)
+
+
+def url2file(url):
+ # Convert URL to filename, i.e. https://url.com/file.txt?auth -> file.txt
+ url = str(Path(url)).replace(':/', '://') # Pathlib turns :// -> :/
+ return Path(urllib.parse.unquote(url)).name.split('?')[0] # '%2F' to '/', split https://url.com/file.txt?auth
+
+
+def download(url, dir='.', unzip=True, delete=True, curl=False, threads=1, retry=3):
+ # Multithreaded file download and unzip function, used in data.yaml for autodownload
+ def download_one(url, dir):
+ # Download 1 file
+ success = True
+ f = dir / Path(url).name # filename
+ if Path(url).is_file(): # exists in current path
+ Path(url).rename(f) # move to dir
+ elif not f.exists():
+ LOGGER.info(f'Downloading {url} to {f}...')
+ for i in range(retry + 1):
+ if curl:
+ s = 'sS' if threads > 1 else '' # silent
+ r = os.system(
+ f'curl -# -{s}L "{url}" -o "{f}" --retry 9 -C -') # curl download with retry, continue
+ success = r == 0
+ else:
+ torch.hub.download_url_to_file(url, f, progress=threads == 1) # torch download
+ success = f.is_file()
+ if success:
+ break
+ elif i < retry:
+ LOGGER.warning(f'Download failure, retrying {i + 1}/{retry} {url}...')
+ else:
+ LOGGER.warning(f'Failed to download {url}...')
+
+ if unzip and success and f.suffix in ('.zip', '.tar', '.gz'):
+ LOGGER.info(f'Unzipping {f}...')
+ if f.suffix == '.zip':
+ ZipFile(f).extractall(path=dir) # unzip
+ elif f.suffix == '.tar':
+ os.system(f'tar xf {f} --directory {f.parent}') # unzip
+ elif f.suffix == '.gz':
+ os.system(f'tar xfz {f} --directory {f.parent}') # unzip
+ if delete:
+ f.unlink() # remove zip
+
+ dir = Path(dir)
+ dir.mkdir(parents=True, exist_ok=True) # make directory
+ if threads > 1:
+ pool = ThreadPool(threads)
+ pool.imap(lambda x: download_one(*x), zip(url, repeat(dir))) # multithreaded
+ pool.close()
+ pool.join()
+ else:
+ for u in [url] if isinstance(url, (str, Path)) else url:
+ download_one(u, dir)
+
+
+def make_divisible(x, divisor):
+ # Returns nearest x divisible by divisor
+ if isinstance(divisor, torch.Tensor):
+ divisor = int(divisor.max()) # to int
+ return math.ceil(x / divisor) * divisor
+
+
+def clean_str(s):
+ # Cleans a string by replacing special characters with underscore _
+ return re.sub(pattern="[|@#!¡·$€%&()=?¿^*;:,¨´><+]", repl="_", string=s)
+
+
+def one_cycle(y1=0.0, y2=1.0, steps=100):
+ # lambda function for sinusoidal ramp from y1 to y2 https://arxiv.org/pdf/1812.01187.pdf
+ return lambda x: ((1 - math.cos(x * math.pi / steps)) / 2) * (y2 - y1) + y1
+
+
+def colorstr(*input):
+ # Colors a string https://en.wikipedia.org/wiki/ANSI_escape_code, i.e. colorstr('blue', 'hello world')
+ *args, string = input if len(input) > 1 else ('blue', 'bold', input[0]) # color arguments, string
+ colors = {
+ 'black': '\033[30m', # basic colors
+ 'red': '\033[31m',
+ 'green': '\033[32m',
+ 'yellow': '\033[33m',
+ 'blue': '\033[34m',
+ 'magenta': '\033[35m',
+ 'cyan': '\033[36m',
+ 'white': '\033[37m',
+ 'bright_black': '\033[90m', # bright colors
+ 'bright_red': '\033[91m',
+ 'bright_green': '\033[92m',
+ 'bright_yellow': '\033[93m',
+ 'bright_blue': '\033[94m',
+ 'bright_magenta': '\033[95m',
+ 'bright_cyan': '\033[96m',
+ 'bright_white': '\033[97m',
+ 'end': '\033[0m', # misc
+ 'bold': '\033[1m',
+ 'underline': '\033[4m'}
+ return ''.join(colors[x] for x in args) + f'{string}' + colors['end']
+
+
+def labels_to_class_weights(labels, nc=80):
+ # Get class weights (inverse frequency) from training labels
+ if labels[0] is None: # no labels loaded
+ return torch.Tensor()
+
+ labels = np.concatenate(labels, 0) # labels.shape = (866643, 5) for COCO
+ classes = labels[:, 0].astype(int) # labels = [class xywh]
+ weights = np.bincount(classes, minlength=nc) # occurrences per class
+
+ # Prepend gridpoint count (for uCE training)
+ # gpi = ((320 / 32 * np.array([1, 2, 4])) ** 2 * 3).sum() # gridpoints per image
+ # weights = np.hstack([gpi * len(labels) - weights.sum() * 9, weights * 9]) ** 0.5 # prepend gridpoints to start
+
+ weights[weights == 0] = 1 # replace empty bins with 1
+ weights = 1 / weights # number of targets per class
+ weights /= weights.sum() # normalize
+ return torch.from_numpy(weights).float()
+
+
+def labels_to_image_weights(labels, nc=80, class_weights=np.ones(80)):
+ # Produces image weights based on class_weights and image contents
+ # Usage: index = random.choices(range(n), weights=image_weights, k=1) # weighted image sample
+ class_counts = np.array([np.bincount(x[:, 0].astype(int), minlength=nc) for x in labels])
+ return (class_weights.reshape(1, nc) * class_counts).sum(1)
+
+
+def coco80_to_coco91_class(): # converts 80-index (val2014) to 91-index (paper)
+ # https://tech.amikelive.com/node-718/what-object-categories-labels-are-in-coco-dataset/
+ # a = np.loadtxt('data/coco.names', dtype='str', delimiter='\n')
+ # b = np.loadtxt('data/coco_paper.names', dtype='str', delimiter='\n')
+ # x1 = [list(a[i] == b).index(True) + 1 for i in range(80)] # darknet to coco
+ # x2 = [list(b[i] == a).index(True) if any(b[i] == a) else None for i in range(91)] # coco to darknet
+ return [
+ 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 27, 28, 31, 32, 33, 34,
+ 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63,
+ 64, 65, 67, 70, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 84, 85, 86, 87, 88, 89, 90]
+
+
+def xyxy2xywh(x):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = (x[:, 0] + x[:, 2]) / 2 # x center
+ y[:, 1] = (x[:, 1] + x[:, 3]) / 2 # y center
+ y[:, 2] = x[:, 2] - x[:, 0] # width
+ y[:, 3] = x[:, 3] - x[:, 1] # height
+ return y
+
+
+def xywh2xyxy(x):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
+ y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
+ y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
+ y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
+ return y
+
+
+def xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):
+ # Convert nx4 boxes from [x, y, w, h] normalized to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * (x[:, 0] - x[:, 2] / 2) + padw # top left x
+ y[:, 1] = h * (x[:, 1] - x[:, 3] / 2) + padh # top left y
+ y[:, 2] = w * (x[:, 0] + x[:, 2] / 2) + padw # bottom right x
+ y[:, 3] = h * (x[:, 1] + x[:, 3] / 2) + padh # bottom right y
+ return y
+
+
+def xyxy2xywhn(x, w=640, h=640, clip=False, eps=0.0):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] normalized where xy1=top-left, xy2=bottom-right
+ if clip:
+ clip_coords(x, (h - eps, w - eps)) # warning: inplace clip
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = ((x[:, 0] + x[:, 2]) / 2) / w # x center
+ y[:, 1] = ((x[:, 1] + x[:, 3]) / 2) / h # y center
+ y[:, 2] = (x[:, 2] - x[:, 0]) / w # width
+ y[:, 3] = (x[:, 3] - x[:, 1]) / h # height
+ return y
+
+
+def xyn2xy(x, w=640, h=640, padw=0, padh=0):
+ # Convert normalized segments into pixel segments, shape (n,2)
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * x[:, 0] + padw # top left x
+ y[:, 1] = h * x[:, 1] + padh # top left y
+ return y
+
+
+def segment2box(segment, width=640, height=640):
+ # Convert 1 segment label to 1 box label, applying inside-image constraint, i.e. (xy1, xy2, ...) to (xyxy)
+ x, y = segment.T # segment xy
+ inside = (x >= 0) & (y >= 0) & (x <= width) & (y <= height)
+ x, y, = x[inside], y[inside]
+ return np.array([x.min(), y.min(), x.max(), y.max()]) if any(x) else np.zeros((1, 4)) # xyxy
+
+
+def segments2boxes(segments):
+ # Convert segment labels to box labels, i.e. (cls, xy1, xy2, ...) to (cls, xywh)
+ boxes = []
+ for s in segments:
+ x, y = s.T # segment xy
+ boxes.append([x.min(), y.min(), x.max(), y.max()]) # cls, xyxy
+ return xyxy2xywh(np.array(boxes)) # cls, xywh
+
+
+def resample_segments(segments, n=1000):
+ # Up-sample an (n,2) segment
+ for i, s in enumerate(segments):
+ s = np.concatenate((s, s[0:1, :]), axis=0)
+ x = np.linspace(0, len(s) - 1, n)
+ xp = np.arange(len(s))
+ segments[i] = np.concatenate([np.interp(x, xp, s[:, i]) for i in range(2)]).reshape(2, -1).T # segment xy
+ return segments
+
+
+def scale_coords(img1_shape, coords, img0_shape, ratio_pad=None):
+ # Rescale coords (xyxy) from img1_shape to img0_shape
+ if ratio_pad is None: # calculate from img0_shape
+ gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
+ pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
+ else:
+ gain = ratio_pad[0][0]
+ pad = ratio_pad[1]
+
+ coords[:, [0, 2]] -= pad[0] # x padding
+ coords[:, [1, 3]] -= pad[1] # y padding
+ coords[:, :4] /= gain
+ clip_coords(coords, img0_shape)
+ return coords
+
+
+def clip_coords(boxes, shape):
+ # Clip bounding xyxy bounding boxes to image shape (height, width)
+ if isinstance(boxes, torch.Tensor): # faster individually
+ boxes[:, 0].clamp_(0, shape[1]) # x1
+ boxes[:, 1].clamp_(0, shape[0]) # y1
+ boxes[:, 2].clamp_(0, shape[1]) # x2
+ boxes[:, 3].clamp_(0, shape[0]) # y2
+ else: # np.array (faster grouped)
+ boxes[:, [0, 2]] = boxes[:, [0, 2]].clip(0, shape[1]) # x1, x2
+ boxes[:, [1, 3]] = boxes[:, [1, 3]].clip(0, shape[0]) # y1, y2
+
+
+def non_max_suppression(
+ prediction,
+ conf_thres=0.25,
+ iou_thres=0.45,
+ classes=None,
+ agnostic=False,
+ multi_label=False,
+ labels=(),
+ max_det=300,
+ nm=0, # number of masks
+):
+ """Non-Maximum Suppression (NMS) on inference results to reject overlapping detections
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+
+ bs = prediction.shape[0] # batch size
+ nc = prediction.shape[2] - nm - 5 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Checks
+ assert 0 <= conf_thres <= 1, f'Invalid Confidence threshold {conf_thres}, valid values are between 0.0 and 1.0'
+ assert 0 <= iou_thres <= 1, f'Invalid IoU {iou_thres}, valid values are between 0.0 and 1.0'
+
+ # Settings
+ # min_wh = 2 # (pixels) minimum box width and height
+ max_wh = 7680 # (pixels) maximum box width and height
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 0.5 + 0.05 * bs # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ mi = 5 + nc # mask start index
+ output = [torch.zeros((0, 6 + nm), device=prediction.device)] * bs
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ lb = labels[xi]
+ v = torch.zeros((len(lb), nc + nm + 5), device=x.device)
+ v[:, :4] = lb[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(lb)), lb[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box/Mask
+ box = xywh2xyxy(x[:, :4]) # center_x, center_y, width, height) to (x1, y1, x2, y2)
+ mask = x[:, mi:] # zero columns if no masks
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:mi] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, 5 + j, None], j[:, None].float(), mask[i]), 1)
+ else: # best class only
+ conf, j = x[:, 5:mi].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float(), mask), 1)[conf.view(-1) > conf_thres]
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+ else:
+ x = x[x[:, 4].argsort(descending=True)] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ LOGGER.warning(f'WARNING: NMS time limit {time_limit:.3f}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def strip_optimizer(f='best.pt', s=''): # from utils.general import *; strip_optimizer()
+ # Strip optimizer from 'f' to finalize training, optionally save as 's'
+ x = torch.load(f, map_location=torch.device('cpu'))
+ if x.get('ema'):
+ x['model'] = x['ema'] # replace model with ema
+ for k in 'optimizer', 'best_fitness', 'wandb_id', 'ema', 'updates': # keys
+ x[k] = None
+ x['epoch'] = -1
+ x['model'].half() # to FP16
+ for p in x['model'].parameters():
+ p.requires_grad = False
+ torch.save(x, s or f)
+ mb = os.path.getsize(s or f) / 1E6 # filesize
+ LOGGER.info(f"Optimizer stripped from {f},{f' saved as {s},' if s else ''} {mb:.1f}MB")
+
+
+def print_mutation(results, hyp, save_dir, bucket, prefix=colorstr('evolve: ')):
+ evolve_csv = save_dir / 'evolve.csv'
+ evolve_yaml = save_dir / 'hyp_evolve.yaml'
+ keys = ('metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/mAP_0.5:0.95', 'val/box_loss',
+ 'val/obj_loss', 'val/cls_loss') + tuple(hyp.keys()) # [results + hyps]
+ keys = tuple(x.strip() for x in keys)
+ vals = results + tuple(hyp.values())
+ n = len(keys)
+
+ # Download (optional)
+ if bucket:
+ url = f'gs://{bucket}/evolve.csv'
+ if gsutil_getsize(url) > (evolve_csv.stat().st_size if evolve_csv.exists() else 0):
+ os.system(f'gsutil cp {url} {save_dir}') # download evolve.csv if larger than local
+
+ # Log to evolve.csv
+ s = '' if evolve_csv.exists() else (('%20s,' * n % keys).rstrip(',') + '\n') # add header
+ with open(evolve_csv, 'a') as f:
+ f.write(s + ('%20.5g,' * n % vals).rstrip(',') + '\n')
+
+ # Save yaml
+ with open(evolve_yaml, 'w') as f:
+ data = pd.read_csv(evolve_csv)
+ data = data.rename(columns=lambda x: x.strip()) # strip keys
+ i = np.argmax(fitness(data.values[:, :4])) #
+ generations = len(data)
+ f.write('# YOLOv5 Hyperparameter Evolution Results\n' + f'# Best generation: {i}\n' +
+ f'# Last generation: {generations - 1}\n' + '# ' + ', '.join(f'{x.strip():>20s}' for x in keys[:7]) +
+ '\n' + '# ' + ', '.join(f'{x:>20.5g}' for x in data.values[i, :7]) + '\n\n')
+ yaml.safe_dump(data.loc[i][7:].to_dict(), f, sort_keys=False)
+
+ # Print to screen
+ LOGGER.info(prefix + f'{generations} generations finished, current result:\n' + prefix +
+ ', '.join(f'{x.strip():>20s}' for x in keys) + '\n' + prefix + ', '.join(f'{x:20.5g}'
+ for x in vals) + '\n\n')
+
+ if bucket:
+ os.system(f'gsutil cp {evolve_csv} {evolve_yaml} gs://{bucket}') # upload
+
+
+def apply_classifier(x, model, img, im0):
+ # Apply a second stage classifier to YOLO outputs
+ # Example model = torchvision.models.__dict__['efficientnet_b0'](pretrained=True).to(device).eval()
+ im0 = [im0] if isinstance(im0, np.ndarray) else im0
+ for i, d in enumerate(x): # per image
+ if d is not None and len(d):
+ d = d.clone()
+
+ # Reshape and pad cutouts
+ b = xyxy2xywh(d[:, :4]) # boxes
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # rectangle to square
+ b[:, 2:] = b[:, 2:] * 1.3 + 30 # pad
+ d[:, :4] = xywh2xyxy(b).long()
+
+ # Rescale boxes from img_size to im0 size
+ scale_coords(img.shape[2:], d[:, :4], im0[i].shape)
+
+ # Classes
+ pred_cls1 = d[:, 5].long()
+ ims = []
+ for a in d:
+ cutout = im0[i][int(a[1]):int(a[3]), int(a[0]):int(a[2])]
+ im = cv2.resize(cutout, (224, 224)) # BGR
+
+ im = im[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ im = np.ascontiguousarray(im, dtype=np.float32) # uint8 to float32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ ims.append(im)
+
+ pred_cls2 = model(torch.Tensor(ims).to(d.device)).argmax(1) # classifier prediction
+ x[i] = x[i][pred_cls1 == pred_cls2] # retain matching class detections
+
+ return x
+
+
+def increment_path(path, exist_ok=False, sep='', mkdir=False):
+ # Increment file or directory path, i.e. runs/exp --> runs/exp{sep}2, runs/exp{sep}3, ... etc.
+ path = Path(path) # os-agnostic
+ if path.exists() and not exist_ok:
+ path, suffix = (path.with_suffix(''), path.suffix) if path.is_file() else (path, '')
+
+ # Method 1
+ for n in range(2, 9999):
+ p = f'{path}{sep}{n}{suffix}' # increment path
+ if not os.path.exists(p): #
+ break
+ path = Path(p)
+
+ # Method 2 (deprecated)
+ # dirs = glob.glob(f"{path}{sep}*") # similar paths
+ # matches = [re.search(rf"{path.stem}{sep}(\d+)", d) for d in dirs]
+ # i = [int(m.groups()[0]) for m in matches if m] # indices
+ # n = max(i) + 1 if i else 2 # increment number
+ # path = Path(f"{path}{sep}{n}{suffix}") # increment path
+
+ if mkdir:
+ path.mkdir(parents=True, exist_ok=True) # make directory
+
+ return path
+
+
+# OpenCV Chinese-friendly functions ------------------------------------------------------------------------------------
+imshow_ = cv2.imshow # copy to avoid recursion errors
+
+
+def imread(path, flags=cv2.IMREAD_COLOR):
+ return cv2.imdecode(np.fromfile(path, np.uint8), flags)
+
+
+def imwrite(path, im):
+ try:
+ cv2.imencode(Path(path).suffix, im)[1].tofile(path)
+ return True
+ except Exception:
+ return False
+
+
+def imshow(path, im):
+ imshow_(path.encode('unicode_escape').decode(), im)
+
+
+cv2.imread, cv2.imwrite, cv2.imshow = imread, imwrite, imshow # redefine
+
+# Variables ------------------------------------------------------------------------------------------------------------
+NCOLS = 0 if is_docker() else shutil.get_terminal_size().columns # terminal window size for tqdm
diff --git a/ipex/seg/utils/google_app_engine/Dockerfile b/ipex/seg/utils/google_app_engine/Dockerfile
new file mode 100644
index 000000000..0155618f4
--- /dev/null
+++ b/ipex/seg/utils/google_app_engine/Dockerfile
@@ -0,0 +1,25 @@
+FROM gcr.io/google-appengine/python
+
+# Create a virtualenv for dependencies. This isolates these packages from
+# system-level packages.
+# Use -p python3 or -p python3.7 to select python version. Default is version 2.
+RUN virtualenv /env -p python3
+
+# Setting these environment variables are the same as running
+# source /env/bin/activate.
+ENV VIRTUAL_ENV /env
+ENV PATH /env/bin:$PATH
+
+RUN apt-get update && apt-get install -y python-opencv
+
+# Copy the application's requirements.txt and run pip to install all
+# dependencies into the virtualenv.
+ADD requirements.txt /app/requirements.txt
+RUN pip install -r /app/requirements.txt
+
+# Add the application source code.
+ADD . /app
+
+# Run a WSGI server to serve the application. gunicorn must be declared as
+# a dependency in requirements.txt.
+CMD gunicorn -b :$PORT main:app
diff --git a/ipex/seg/utils/google_app_engine/additional_requirements.txt b/ipex/seg/utils/google_app_engine/additional_requirements.txt
new file mode 100644
index 000000000..42d7ffc0e
--- /dev/null
+++ b/ipex/seg/utils/google_app_engine/additional_requirements.txt
@@ -0,0 +1,4 @@
+# add these requirements in your app on top of the existing ones
+pip==21.1
+Flask==1.0.2
+gunicorn==19.9.0
diff --git a/ipex/seg/utils/google_app_engine/app.yaml b/ipex/seg/utils/google_app_engine/app.yaml
new file mode 100644
index 000000000..5056b7c11
--- /dev/null
+++ b/ipex/seg/utils/google_app_engine/app.yaml
@@ -0,0 +1,14 @@
+runtime: custom
+env: flex
+
+service: yolov5app
+
+liveness_check:
+ initial_delay_sec: 600
+
+manual_scaling:
+ instances: 1
+resources:
+ cpu: 1
+ memory_gb: 4
+ disk_size_gb: 20
diff --git a/ipex/seg/utils/loggers/__init__.py b/ipex/seg/utils/loggers/__init__.py
new file mode 100644
index 000000000..880039b19
--- /dev/null
+++ b/ipex/seg/utils/loggers/__init__.py
@@ -0,0 +1,326 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Logging utils
+"""
+
+import os
+import warnings
+from pathlib import Path
+
+import pkg_resources as pkg
+import torch
+from torch.utils.tensorboard import SummaryWriter
+
+from utils.general import colorstr, cv2
+from utils.loggers.clearml.clearml_utils import ClearmlLogger
+from utils.loggers.wandb.wandb_utils import WandbLogger
+from utils.plots import plot_images, plot_labels, plot_results
+from utils.torch_utils import de_parallel
+
+LOGGERS = ('csv', 'tb', 'wandb', 'clearml') # *.csv, TensorBoard, Weights & Biases, ClearML
+RANK = int(os.getenv('RANK', -1))
+
+try:
+ import wandb
+
+ assert hasattr(wandb, '__version__') # verify package import not local dir
+ if pkg.parse_version(wandb.__version__) >= pkg.parse_version('0.12.2') and RANK in {0, -1}:
+ try:
+ wandb_login_success = wandb.login(timeout=30)
+ except wandb.errors.UsageError: # known non-TTY terminal issue
+ wandb_login_success = False
+ if not wandb_login_success:
+ wandb = None
+except (ImportError, AssertionError):
+ wandb = None
+
+try:
+ import clearml
+
+ assert hasattr(clearml, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ clearml = None
+
+
+class Loggers():
+ # YOLOv5 Loggers class
+ def __init__(self, save_dir=None, weights=None, opt=None, hyp=None, logger=None, include=LOGGERS):
+ self.save_dir = save_dir
+ self.weights = weights
+ self.opt = opt
+ self.hyp = hyp
+ self.plots = not opt.noplots # plot results
+ self.logger = logger # for printing results to console
+ self.include = include
+ self.keys = [
+ 'train/box_loss',
+ 'train/obj_loss',
+ 'train/cls_loss', # train loss
+ 'metrics/precision',
+ 'metrics/recall',
+ 'metrics/mAP_0.5',
+ 'metrics/mAP_0.5:0.95', # metrics
+ 'val/box_loss',
+ 'val/obj_loss',
+ 'val/cls_loss', # val loss
+ 'x/lr0',
+ 'x/lr1',
+ 'x/lr2'] # params
+ self.best_keys = ['best/epoch', 'best/precision', 'best/recall', 'best/mAP_0.5', 'best/mAP_0.5:0.95']
+ for k in LOGGERS:
+ setattr(self, k, None) # init empty logger dictionary
+ self.csv = True # always log to csv
+
+ # Messages
+ if not wandb:
+ prefix = colorstr('Weights & Biases: ')
+ s = f"{prefix}run 'pip install wandb' to automatically track and visualize YOLOv5 🚀 runs in Weights & Biases"
+ self.logger.info(s)
+ if not clearml:
+ prefix = colorstr('ClearML: ')
+ s = f"{prefix}run 'pip install clearml' to automatically track, visualize and remotely train YOLOv5 🚀 in ClearML"
+ self.logger.info(s)
+
+ # TensorBoard
+ s = self.save_dir
+ if 'tb' in self.include and not self.opt.evolve:
+ prefix = colorstr('TensorBoard: ')
+ self.logger.info(f"{prefix}Start with 'tensorboard --logdir {s.parent}', view at http://localhost:6006/")
+ self.tb = SummaryWriter(str(s))
+
+ # W&B
+ if wandb and 'wandb' in self.include:
+ wandb_artifact_resume = isinstance(self.opt.resume, str) and self.opt.resume.startswith('wandb-artifact://')
+ run_id = torch.load(self.weights).get('wandb_id') if self.opt.resume and not wandb_artifact_resume else None
+ self.opt.hyp = self.hyp # add hyperparameters
+ self.wandb = WandbLogger(self.opt, run_id)
+ # temp warn. because nested artifacts not supported after 0.12.10
+ if pkg.parse_version(wandb.__version__) >= pkg.parse_version('0.12.11'):
+ s = "YOLOv5 temporarily requires wandb version 0.12.10 or below. Some features may not work as expected."
+ self.logger.warning(s)
+ else:
+ self.wandb = None
+
+ # ClearML
+ if clearml and 'clearml' in self.include:
+ self.clearml = ClearmlLogger(self.opt, self.hyp)
+ else:
+ self.clearml = None
+
+ def on_train_start(self):
+ # Callback runs on train start
+ pass
+
+ def on_pretrain_routine_end(self, labels, names):
+ # Callback runs on pre-train routine end
+ if self.plots:
+ plot_labels(labels, names, self.save_dir)
+ paths = self.save_dir.glob('*labels*.jpg') # training labels
+ if self.wandb:
+ self.wandb.log({"Labels": [wandb.Image(str(x), caption=x.name) for x in paths]})
+ # if self.clearml:
+ # pass # ClearML saves these images automatically using hooks
+
+ def on_train_batch_end(self, model, ni, imgs, targets, paths):
+ # Callback runs on train batch end
+ # ni: number integrated batches (since train start)
+ if self.plots:
+ if ni < 3:
+ f = self.save_dir / f'train_batch{ni}.jpg' # filename
+ plot_images(imgs, targets, paths, f)
+ if ni == 0 and self.tb and not self.opt.sync_bn:
+ log_tensorboard_graph(self.tb, model, imgsz=(self.opt.imgsz, self.opt.imgsz))
+ if ni == 10 and (self.wandb or self.clearml):
+ files = sorted(self.save_dir.glob('train*.jpg'))
+ if self.wandb:
+ self.wandb.log({'Mosaics': [wandb.Image(str(f), caption=f.name) for f in files if f.exists()]})
+ if self.clearml:
+ self.clearml.log_debug_samples(files, title='Mosaics')
+
+ def on_train_epoch_end(self, epoch):
+ # Callback runs on train epoch end
+ if self.wandb:
+ self.wandb.current_epoch = epoch + 1
+
+ def on_val_image_end(self, pred, predn, path, names, im):
+ # Callback runs on val image end
+ if self.wandb:
+ self.wandb.val_one_image(pred, predn, path, names, im)
+ if self.clearml:
+ self.clearml.log_image_with_boxes(path, pred, names, im)
+
+ def on_val_end(self):
+ # Callback runs on val end
+ if self.wandb or self.clearml:
+ files = sorted(self.save_dir.glob('val*.jpg'))
+ if self.wandb:
+ self.wandb.log({"Validation": [wandb.Image(str(f), caption=f.name) for f in files]})
+ if self.clearml:
+ self.clearml.log_debug_samples(files, title='Validation')
+
+ def on_fit_epoch_end(self, vals, epoch, best_fitness, fi):
+ # Callback runs at the end of each fit (train+val) epoch
+ x = dict(zip(self.keys, vals))
+ if self.csv:
+ file = self.save_dir / 'results.csv'
+ n = len(x) + 1 # number of cols
+ s = '' if file.exists() else (('%20s,' * n % tuple(['epoch'] + self.keys)).rstrip(',') + '\n') # add header
+ with open(file, 'a') as f:
+ f.write(s + ('%20.5g,' * n % tuple([epoch] + vals)).rstrip(',') + '\n')
+
+ if self.tb:
+ for k, v in x.items():
+ self.tb.add_scalar(k, v, epoch)
+ elif self.clearml: # log to ClearML if TensorBoard not used
+ for k, v in x.items():
+ title, series = k.split('/')
+ self.clearml.task.get_logger().report_scalar(title, series, v, epoch)
+
+ if self.wandb:
+ if best_fitness == fi:
+ best_results = [epoch] + vals[3:7]
+ for i, name in enumerate(self.best_keys):
+ self.wandb.wandb_run.summary[name] = best_results[i] # log best results in the summary
+ self.wandb.log(x)
+ self.wandb.end_epoch(best_result=best_fitness == fi)
+
+ if self.clearml:
+ self.clearml.current_epoch_logged_images = set() # reset epoch image limit
+ self.clearml.current_epoch += 1
+
+ def on_model_save(self, last, epoch, final_epoch, best_fitness, fi):
+ # Callback runs on model save event
+ if (epoch + 1) % self.opt.save_period == 0 and not final_epoch and self.opt.save_period != -1:
+ if self.wandb:
+ self.wandb.log_model(last.parent, self.opt, epoch, fi, best_model=best_fitness == fi)
+ if self.clearml:
+ self.clearml.task.update_output_model(model_path=str(last),
+ model_name='Latest Model',
+ auto_delete_file=False)
+
+ def on_train_end(self, last, best, epoch, results):
+ # Callback runs on training end, i.e. saving best model
+ if self.plots:
+ plot_results(file=self.save_dir / 'results.csv') # save results.png
+ files = ['results.png', 'confusion_matrix.png', *(f'{x}_curve.png' for x in ('F1', 'PR', 'P', 'R'))]
+ files = [(self.save_dir / f) for f in files if (self.save_dir / f).exists()] # filter
+ self.logger.info(f"Results saved to {colorstr('bold', self.save_dir)}")
+
+ if self.tb and not self.clearml: # These images are already captured by ClearML by now, we don't want doubles
+ for f in files:
+ self.tb.add_image(f.stem, cv2.imread(str(f))[..., ::-1], epoch, dataformats='HWC')
+
+ if self.wandb:
+ self.wandb.log(dict(zip(self.keys[3:10], results)))
+ self.wandb.log({"Results": [wandb.Image(str(f), caption=f.name) for f in files]})
+ # Calling wandb.log. TODO: Refactor this into WandbLogger.log_model
+ if not self.opt.evolve:
+ wandb.log_artifact(str(best if best.exists() else last),
+ type='model',
+ name=f'run_{self.wandb.wandb_run.id}_model',
+ aliases=['latest', 'best', 'stripped'])
+ self.wandb.finish_run()
+
+ if self.clearml and not self.opt.evolve:
+ self.clearml.task.update_output_model(model_path=str(best if best.exists() else last), name='Best Model')
+
+ def on_params_update(self, params: dict):
+ # Update hyperparams or configs of the experiment
+ if self.wandb:
+ self.wandb.wandb_run.config.update(params, allow_val_change=True)
+
+
+class GenericLogger:
+ """
+ YOLOv5 General purpose logger for non-task specific logging
+ Usage: from utils.loggers import GenericLogger; logger = GenericLogger(...)
+ Arguments
+ opt: Run arguments
+ console_logger: Console logger
+ include: loggers to include
+ """
+
+ def __init__(self, opt, console_logger, include=('tb', 'wandb')):
+ # init default loggers
+ self.save_dir = Path(opt.save_dir)
+ self.include = include
+ self.console_logger = console_logger
+ self.csv = self.save_dir / 'results.csv' # CSV logger
+ if 'tb' in self.include:
+ prefix = colorstr('TensorBoard: ')
+ self.console_logger.info(
+ f"{prefix}Start with 'tensorboard --logdir {self.save_dir.parent}', view at http://localhost:6006/")
+ self.tb = SummaryWriter(str(self.save_dir))
+
+ if wandb and 'wandb' in self.include:
+ self.wandb = wandb.init(project=web_project_name(str(opt.project)),
+ name=None if opt.name == "exp" else opt.name,
+ config=opt)
+ else:
+ self.wandb = None
+
+ def log_metrics(self, metrics, epoch):
+ # Log metrics dictionary to all loggers
+ if self.csv:
+ keys, vals = list(metrics.keys()), list(metrics.values())
+ n = len(metrics) + 1 # number of cols
+ s = '' if self.csv.exists() else (('%23s,' * n % tuple(['epoch'] + keys)).rstrip(',') + '\n') # header
+ with open(self.csv, 'a') as f:
+ f.write(s + ('%23.5g,' * n % tuple([epoch] + vals)).rstrip(',') + '\n')
+
+ if self.tb:
+ for k, v in metrics.items():
+ self.tb.add_scalar(k, v, epoch)
+
+ if self.wandb:
+ self.wandb.log(metrics, step=epoch)
+
+ def log_images(self, files, name='Images', epoch=0):
+ # Log images to all loggers
+ files = [Path(f) for f in (files if isinstance(files, (tuple, list)) else [files])] # to Path
+ files = [f for f in files if f.exists()] # filter by exists
+
+ if self.tb:
+ for f in files:
+ self.tb.add_image(f.stem, cv2.imread(str(f))[..., ::-1], epoch, dataformats='HWC')
+
+ if self.wandb:
+ self.wandb.log({name: [wandb.Image(str(f), caption=f.name) for f in files]}, step=epoch)
+
+ def log_graph(self, model, imgsz=(640, 640)):
+ # Log model graph to all loggers
+ if self.tb:
+ log_tensorboard_graph(self.tb, model, imgsz)
+
+ def log_model(self, model_path, epoch=0, metadata={}):
+ # Log model to all loggers
+ if self.wandb:
+ art = wandb.Artifact(name=f"run_{wandb.run.id}_model", type="model", metadata=metadata)
+ art.add_file(str(model_path))
+ wandb.log_artifact(art)
+
+ def update_params(self, params):
+ # Update the paramters logged
+ if self.wandb:
+ wandb.run.config.update(params, allow_val_change=True)
+
+
+def log_tensorboard_graph(tb, model, imgsz=(640, 640)):
+ # Log model graph to TensorBoard
+ try:
+ p = next(model.parameters()) # for device, type
+ imgsz = (imgsz, imgsz) if isinstance(imgsz, int) else imgsz # expand
+ im = torch.zeros((1, 3, *imgsz)).to(p.device).type_as(p) # input image (WARNING: must be zeros, not empty)
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress jit trace warning
+ tb.add_graph(torch.jit.trace(de_parallel(model), im, strict=False), [])
+ except Exception as e:
+ print(f'WARNING: TensorBoard graph visualization failure {e}')
+
+
+def web_project_name(project):
+ # Convert local project name to web project name
+ if not project.startswith('runs/train'):
+ return project
+ suffix = '-Classify' if project.endswith('-cls') else '-Segment' if project.endswith('-seg') else ''
+ return f'YOLOv5{suffix}'
diff --git a/ipex/seg/utils/loggers/clearml/README.md b/ipex/seg/utils/loggers/clearml/README.md
new file mode 100644
index 000000000..64eef6bef
--- /dev/null
+++ b/ipex/seg/utils/loggers/clearml/README.md
@@ -0,0 +1,222 @@
+# ClearML Integration
+
+
 +
+## About ClearML
+
+[ClearML](https://cutt.ly/yolov5-tutorial-clearml) is an [open-source](https://github.com/allegroai/clearml) toolbox designed to save you time ⏱️.
+
+🔨 Track every YOLOv5 training run in the experiment manager
+
+🔧 Version and easily access your custom training data with the integrated ClearML Data Versioning Tool
+
+🔦 Remotely train and monitor your YOLOv5 training runs using ClearML Agent
+
+🔬 Get the very best mAP using ClearML Hyperparameter Optimization
+
+🔭 Turn your newly trained YOLOv5 model into an API with just a few commands using ClearML Serving
+
+
+
+## About ClearML
+
+[ClearML](https://cutt.ly/yolov5-tutorial-clearml) is an [open-source](https://github.com/allegroai/clearml) toolbox designed to save you time ⏱️.
+
+🔨 Track every YOLOv5 training run in the experiment manager
+
+🔧 Version and easily access your custom training data with the integrated ClearML Data Versioning Tool
+
+🔦 Remotely train and monitor your YOLOv5 training runs using ClearML Agent
+
+🔬 Get the very best mAP using ClearML Hyperparameter Optimization
+
+🔭 Turn your newly trained YOLOv5 model into an API with just a few commands using ClearML Serving
+
+
+And so much more. It's up to you how many of these tools you want to use, you can stick to the experiment manager, or chain them all together into an impressive pipeline!
+
+
+
+
+
+
+
+
+
+## 🦾 Setting Things Up
+
+To keep track of your experiments and/or data, ClearML needs to communicate to a server. You have 2 options to get one:
+
+Either sign up for free to the [ClearML Hosted Service](https://cutt.ly/yolov5-tutorial-clearml) or you can set up your own server, see [here](https://clear.ml/docs/latest/docs/deploying_clearml/clearml_server). Even the server is open-source, so even if you're dealing with sensitive data, you should be good to go!
+
+1. Install the `clearml` python package:
+
+ ```bash
+ pip install clearml
+ ```
+
+1. Connect the ClearML SDK to the server by [creating credentials](https://app.clear.ml/settings/workspace-configuration) (go right top to Settings -> Workspace -> Create new credentials), then execute the command below and follow the instructions:
+
+ ```bash
+ clearml-init
+ ```
+
+That's it! You're done 😎
+
+
+
+## 🚀 Training YOLOv5 With ClearML
+
+To enable ClearML experiment tracking, simply install the ClearML pip package.
+
+```bash
+pip install clearml
+```
+
+This will enable integration with the YOLOv5 training script. Every training run from now on, will be captured and stored by the ClearML experiment manager. If you want to change the `project_name` or `task_name`, head over to our custom logger, where you can change it: `utils/loggers/clearml/clearml_utils.py`
+
+```bash
+python train.py --img 640 --batch 16 --epochs 3 --data coco128.yaml --weights yolov5s.pt --cache
+```
+
+This will capture:
+- Source code + uncommitted changes
+- Installed packages
+- (Hyper)parameters
+- Model files (use `--save-period n` to save a checkpoint every n epochs)
+- Console output
+- Scalars (mAP_0.5, mAP_0.5:0.95, precision, recall, losses, learning rates, ...)
+- General info such as machine details, runtime, creation date etc.
+- All produced plots such as label correlogram and confusion matrix
+- Images with bounding boxes per epoch
+- Mosaic per epoch
+- Validation images per epoch
+- ...
+
+That's a lot right? 🤯
+Now, we can visualize all of this information in the ClearML UI to get an overview of our training progress. Add custom columns to the table view (such as e.g. mAP_0.5) so you can easily sort on the best performing model. Or select multiple experiments and directly compare them!
+
+There even more we can do with all of this information, like hyperparameter optimization and remote execution, so keep reading if you want to see how that works!
+
+
+
+## 🔗 Dataset Version Management
+
+Versioning your data separately from your code is generally a good idea and makes it easy to aqcuire the latest version too. This repository supports supplying a dataset version ID and it will make sure to get the data if it's not there yet. Next to that, this workflow also saves the used dataset ID as part of the task parameters, so you will always know for sure which data was used in which experiment!
+
+
+
+### Prepare Your Dataset
+
+The YOLOv5 repository supports a number of different datasets by using yaml files containing their information. By default datasets are downloaded to the `../datasets` folder in relation to the repository root folder. So if you downloaded the `coco128` dataset using the link in the yaml or with the scripts provided by yolov5, you get this folder structure:
+
+```
+..
+|_ yolov5
+|_ datasets
+ |_ coco128
+ |_ images
+ |_ labels
+ |_ LICENSE
+ |_ README.txt
+```
+But this can be any dataset you wish. Feel free to use your own, as long as you keep to this folder structure.
+
+Next, ⚠️**copy the corresponding yaml file to the root of the dataset folder**⚠️. This yaml files contains the information ClearML will need to properly use the dataset. You can make this yourself too, of course, just follow the structure of the example yamls.
+
+Basically we need the following keys: `path`, `train`, `test`, `val`, `nc`, `names`.
+
+```
+..
+|_ yolov5
+|_ datasets
+ |_ coco128
+ |_ images
+ |_ labels
+ |_ coco128.yaml # <---- HERE!
+ |_ LICENSE
+ |_ README.txt
+```
+
+### Upload Your Dataset
+
+To get this dataset into ClearML as a versionned dataset, go to the dataset root folder and run the following command:
+```bash
+cd coco128
+clearml-data sync --project YOLOv5 --name coco128 --folder .
+```
+
+The command `clearml-data sync` is actually a shorthand command. You could also run these commands one after the other:
+```bash
+# Optionally add --parent if you want to base
+# this version on another dataset version, so no duplicate files are uploaded!
+clearml-data create --name coco128 --project YOLOv5
+clearml-data add --files .
+clearml-data close
+```
+
+### Run Training Using A ClearML Dataset
+
+Now that you have a ClearML dataset, you can very simply use it to train custom YOLOv5 🚀 models!
+
+```bash
+python train.py --img 640 --batch 16 --epochs 3 --data clearml:// --weights yolov5s.pt --cache
+```
+
+
+
+## 👀 Hyperparameter Optimization
+
+Now that we have our experiments and data versioned, it's time to take a look at what we can build on top!
+
+Using the code information, installed packages and environment details, the experiment itself is now **completely reproducible**. In fact, ClearML allows you to clone an experiment and even change its parameters. We can then just rerun it with these new parameters automatically, this is basically what HPO does!
+
+To **run hyperparameter optimization locally**, we've included a pre-made script for you. Just make sure a training task has been run at least once, so it is in the ClearML experiment manager, we will essentially clone it and change its hyperparameters.
+
+You'll need to fill in the ID of this `template task` in the script found at `utils/loggers/clearml/hpo.py` and then just run it :) You can change `task.execute_locally()` to `task.execute()` to put it in a ClearML queue and have a remote agent work on it instead.
+
+```bash
+# To use optuna, install it first, otherwise you can change the optimizer to just be RandomSearch
+pip install optuna
+python utils/loggers/clearml/hpo.py
+```
+
+
+
+## 🤯 Remote Execution (advanced)
+
+Running HPO locally is really handy, but what if we want to run our experiments on a remote machine instead? Maybe you have access to a very powerful GPU machine on-site or you have some budget to use cloud GPUs.
+This is where the ClearML Agent comes into play. Check out what the agent can do here:
+
+- [YouTube video](https://youtu.be/MX3BrXnaULs)
+- [Documentation](https://clear.ml/docs/latest/docs/clearml_agent)
+
+In short: every experiment tracked by the experiment manager contains enough information to reproduce it on a different machine (installed packages, uncommitted changes etc.). So a ClearML agent does just that: it listens to a queue for incoming tasks and when it finds one, it recreates the environment and runs it while still reporting scalars, plots etc. to the experiment manager.
+
+You can turn any machine (a cloud VM, a local GPU machine, your own laptop ... ) into a ClearML agent by simply running:
+```bash
+clearml-agent daemon --queue [--docker]
+```
+
+### Cloning, Editing And Enqueuing
+
+With our agent running, we can give it some work. Remember from the HPO section that we can clone a task and edit the hyperparameters? We can do that from the interface too!
+
+🪄 Clone the experiment by right clicking it
+
+🎯 Edit the hyperparameters to what you wish them to be
+
+⏳ Enqueue the task to any of the queues by right clicking it
+
+
+
+### Executing A Task Remotely
+
+Now you can clone a task like we explained above, or simply mark your current script by adding `task.execute_remotely()` and on execution it will be put into a queue, for the agent to start working on!
+
+To run the YOLOv5 training script remotely, all you have to do is add this line to the training.py script after the clearml logger has been instatiated:
+```python
+# ...
+# Loggers
+data_dict = None
+if RANK in {-1, 0}:
+ loggers = Loggers(save_dir, weights, opt, hyp, LOGGER) # loggers instance
+ if loggers.clearml:
+ loggers.clearml.task.execute_remotely(queue='my_queue') # <------ ADD THIS LINE
+ # Data_dict is either None is user did not choose for ClearML dataset or is filled in by ClearML
+ data_dict = loggers.clearml.data_dict
+# ...
+```
+When running the training script after this change, python will run the script up until that line, after which it will package the code and send it to the queue instead!
+
+### Autoscaling workers
+
+ClearML comes with autoscalers too! This tool will automatically spin up new remote machines in the cloud of your choice (AWS, GCP, Azure) and turn them into ClearML agents for you whenever there are experiments detected in the queue. Once the tasks are processed, the autoscaler will automatically shut down the remote machines and you stop paying!
+
+Check out the autoscalers getting started video below.
+
+[](https://youtu.be/j4XVMAaUt3E)
diff --git a/ipex/seg/utils/loggers/clearml/__init__.py b/ipex/seg/utils/loggers/clearml/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/ipex/seg/utils/loggers/clearml/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/ipex/seg/utils/loggers/clearml/clearml_utils.py b/ipex/seg/utils/loggers/clearml/clearml_utils.py
new file mode 100644
index 000000000..1e1369073
--- /dev/null
+++ b/ipex/seg/utils/loggers/clearml/clearml_utils.py
@@ -0,0 +1,156 @@
+"""Main Logger class for ClearML experiment tracking."""
+import glob
+import re
+from pathlib import Path
+
+import numpy as np
+import yaml
+
+from utils.plots import Annotator, colors
+
+try:
+ import clearml
+ from clearml import Dataset, Task
+ assert hasattr(clearml, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ clearml = None
+
+
+def construct_dataset(clearml_info_string):
+ """Load in a clearml dataset and fill the internal data_dict with its contents.
+ """
+ dataset_id = clearml_info_string.replace('clearml://', '')
+ dataset = Dataset.get(dataset_id=dataset_id)
+ dataset_root_path = Path(dataset.get_local_copy())
+
+ # We'll search for the yaml file definition in the dataset
+ yaml_filenames = list(glob.glob(str(dataset_root_path / "*.yaml")) + glob.glob(str(dataset_root_path / "*.yml")))
+ if len(yaml_filenames) > 1:
+ raise ValueError('More than one yaml file was found in the dataset root, cannot determine which one contains '
+ 'the dataset definition this way.')
+ elif len(yaml_filenames) == 0:
+ raise ValueError('No yaml definition found in dataset root path, check that there is a correct yaml file '
+ 'inside the dataset root path.')
+ with open(yaml_filenames[0]) as f:
+ dataset_definition = yaml.safe_load(f)
+
+ assert set(dataset_definition.keys()).issuperset(
+ {'train', 'test', 'val', 'nc', 'names'}
+ ), "The right keys were not found in the yaml file, make sure it at least has the following keys: ('train', 'test', 'val', 'nc', 'names')"
+
+ data_dict = dict()
+ data_dict['train'] = str(
+ (dataset_root_path / dataset_definition['train']).resolve()) if dataset_definition['train'] else None
+ data_dict['test'] = str(
+ (dataset_root_path / dataset_definition['test']).resolve()) if dataset_definition['test'] else None
+ data_dict['val'] = str(
+ (dataset_root_path / dataset_definition['val']).resolve()) if dataset_definition['val'] else None
+ data_dict['nc'] = dataset_definition['nc']
+ data_dict['names'] = dataset_definition['names']
+
+ return data_dict
+
+
+class ClearmlLogger:
+ """Log training runs, datasets, models, and predictions to ClearML.
+
+ This logger sends information to ClearML at app.clear.ml or to your own hosted server. By default,
+ this information includes hyperparameters, system configuration and metrics, model metrics, code information and
+ basic data metrics and analyses.
+
+ By providing additional command line arguments to train.py, datasets,
+ models and predictions can also be logged.
+ """
+
+ def __init__(self, opt, hyp):
+ """
+ - Initialize ClearML Task, this object will capture the experiment
+ - Upload dataset version to ClearML Data if opt.upload_dataset is True
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ hyp (dict) -- Hyperparameters for this run
+
+ """
+ self.current_epoch = 0
+ # Keep tracked of amount of logged images to enforce a limit
+ self.current_epoch_logged_images = set()
+ # Maximum number of images to log to clearML per epoch
+ self.max_imgs_to_log_per_epoch = 16
+ # Get the interval of epochs when bounding box images should be logged
+ self.bbox_interval = opt.bbox_interval
+ self.clearml = clearml
+ self.task = None
+ self.data_dict = None
+ if self.clearml:
+ self.task = Task.init(
+ project_name='YOLOv5',
+ task_name='training',
+ tags=['YOLOv5'],
+ output_uri=True,
+ auto_connect_frameworks={'pytorch': False}
+ # We disconnect pytorch auto-detection, because we added manual model save points in the code
+ )
+ # ClearML's hooks will already grab all general parameters
+ # Only the hyperparameters coming from the yaml config file
+ # will have to be added manually!
+ self.task.connect(hyp, name='Hyperparameters')
+
+ # Get ClearML Dataset Version if requested
+ if opt.data.startswith('clearml://'):
+ # data_dict should have the following keys:
+ # names, nc (number of classes), test, train, val (all three relative paths to ../datasets)
+ self.data_dict = construct_dataset(opt.data)
+ # Set data to data_dict because wandb will crash without this information and opt is the best way
+ # to give it to them
+ opt.data = self.data_dict
+
+ def log_debug_samples(self, files, title='Debug Samples'):
+ """
+ Log files (images) as debug samples in the ClearML task.
+
+ arguments:
+ files (List(PosixPath)) a list of file paths in PosixPath format
+ title (str) A title that groups together images with the same values
+ """
+ for f in files:
+ if f.exists():
+ it = re.search(r'_batch(\d+)', f.name)
+ iteration = int(it.groups()[0]) if it else 0
+ self.task.get_logger().report_image(title=title,
+ series=f.name.replace(it.group(), ''),
+ local_path=str(f),
+ iteration=iteration)
+
+ def log_image_with_boxes(self, image_path, boxes, class_names, image, conf_threshold=0.25):
+ """
+ Draw the bounding boxes on a single image and report the result as a ClearML debug sample.
+
+ arguments:
+ image_path (PosixPath) the path the original image file
+ boxes (list): list of scaled predictions in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ class_names (dict): dict containing mapping of class int to class name
+ image (Tensor): A torch tensor containing the actual image data
+ """
+ if len(self.current_epoch_logged_images) < self.max_imgs_to_log_per_epoch and self.current_epoch >= 0:
+ # Log every bbox_interval times and deduplicate for any intermittend extra eval runs
+ if self.current_epoch % self.bbox_interval == 0 and image_path not in self.current_epoch_logged_images:
+ im = np.ascontiguousarray(np.moveaxis(image.mul(255).clamp(0, 255).byte().cpu().numpy(), 0, 2))
+ annotator = Annotator(im=im, pil=True)
+ for i, (conf, class_nr, box) in enumerate(zip(boxes[:, 4], boxes[:, 5], boxes[:, :4])):
+ color = colors(i)
+
+ class_name = class_names[int(class_nr)]
+ confidence_percentage = round(float(conf) * 100, 2)
+ label = f"{class_name}: {confidence_percentage}%"
+
+ if conf > conf_threshold:
+ annotator.rectangle(box.cpu().numpy(), outline=color)
+ annotator.box_label(box.cpu().numpy(), label=label, color=color)
+
+ annotated_image = annotator.result()
+ self.task.get_logger().report_image(title='Bounding Boxes',
+ series=image_path.name,
+ iteration=self.current_epoch,
+ image=annotated_image)
+ self.current_epoch_logged_images.add(image_path)
diff --git a/ipex/seg/utils/loggers/clearml/hpo.py b/ipex/seg/utils/loggers/clearml/hpo.py
new file mode 100644
index 000000000..96c2c544c
--- /dev/null
+++ b/ipex/seg/utils/loggers/clearml/hpo.py
@@ -0,0 +1,84 @@
+from clearml import Task
+# Connecting ClearML with the current process,
+# from here on everything is logged automatically
+from clearml.automation import HyperParameterOptimizer, UniformParameterRange
+from clearml.automation.optuna import OptimizerOptuna
+
+task = Task.init(project_name='Hyper-Parameter Optimization',
+ task_name='YOLOv5',
+ task_type=Task.TaskTypes.optimizer,
+ reuse_last_task_id=False)
+
+# Example use case:
+optimizer = HyperParameterOptimizer(
+ # This is the experiment we want to optimize
+ base_task_id='',
+ # here we define the hyper-parameters to optimize
+ # Notice: The parameter name should exactly match what you see in the UI: /
+ # For Example, here we see in the base experiment a section Named: "General"
+ # under it a parameter named "batch_size", this becomes "General/batch_size"
+ # If you have `argparse` for example, then arguments will appear under the "Args" section,
+ # and you should instead pass "Args/batch_size"
+ hyper_parameters=[
+ UniformParameterRange('Hyperparameters/lr0', min_value=1e-5, max_value=1e-1),
+ UniformParameterRange('Hyperparameters/lrf', min_value=0.01, max_value=1.0),
+ UniformParameterRange('Hyperparameters/momentum', min_value=0.6, max_value=0.98),
+ UniformParameterRange('Hyperparameters/weight_decay', min_value=0.0, max_value=0.001),
+ UniformParameterRange('Hyperparameters/warmup_epochs', min_value=0.0, max_value=5.0),
+ UniformParameterRange('Hyperparameters/warmup_momentum', min_value=0.0, max_value=0.95),
+ UniformParameterRange('Hyperparameters/warmup_bias_lr', min_value=0.0, max_value=0.2),
+ UniformParameterRange('Hyperparameters/box', min_value=0.02, max_value=0.2),
+ UniformParameterRange('Hyperparameters/cls', min_value=0.2, max_value=4.0),
+ UniformParameterRange('Hyperparameters/cls_pw', min_value=0.5, max_value=2.0),
+ UniformParameterRange('Hyperparameters/obj', min_value=0.2, max_value=4.0),
+ UniformParameterRange('Hyperparameters/obj_pw', min_value=0.5, max_value=2.0),
+ UniformParameterRange('Hyperparameters/iou_t', min_value=0.1, max_value=0.7),
+ UniformParameterRange('Hyperparameters/anchor_t', min_value=2.0, max_value=8.0),
+ UniformParameterRange('Hyperparameters/fl_gamma', min_value=0.0, max_value=4.0),
+ UniformParameterRange('Hyperparameters/hsv_h', min_value=0.0, max_value=0.1),
+ UniformParameterRange('Hyperparameters/hsv_s', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/hsv_v', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/degrees', min_value=0.0, max_value=45.0),
+ UniformParameterRange('Hyperparameters/translate', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/scale', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/shear', min_value=0.0, max_value=10.0),
+ UniformParameterRange('Hyperparameters/perspective', min_value=0.0, max_value=0.001),
+ UniformParameterRange('Hyperparameters/flipud', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/fliplr', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/mosaic', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/mixup', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/copy_paste', min_value=0.0, max_value=1.0)],
+ # this is the objective metric we want to maximize/minimize
+ objective_metric_title='metrics',
+ objective_metric_series='mAP_0.5',
+ # now we decide if we want to maximize it or minimize it (accuracy we maximize)
+ objective_metric_sign='max',
+ # let us limit the number of concurrent experiments,
+ # this in turn will make sure we do dont bombard the scheduler with experiments.
+ # if we have an auto-scaler connected, this, by proxy, will limit the number of machine
+ max_number_of_concurrent_tasks=1,
+ # this is the optimizer class (actually doing the optimization)
+ # Currently, we can choose from GridSearch, RandomSearch or OptimizerBOHB (Bayesian optimization Hyper-Band)
+ optimizer_class=OptimizerOptuna,
+ # If specified only the top K performing Tasks will be kept, the others will be automatically archived
+ save_top_k_tasks_only=5, # 5,
+ compute_time_limit=None,
+ total_max_jobs=20,
+ min_iteration_per_job=None,
+ max_iteration_per_job=None,
+)
+
+# report every 10 seconds, this is way too often, but we are testing here
+optimizer.set_report_period(10)
+# You can also use the line below instead to run all the optimizer tasks locally, without using queues or agent
+# an_optimizer.start_locally(job_complete_callback=job_complete_callback)
+# set the time limit for the optimization process (2 hours)
+optimizer.set_time_limit(in_minutes=120.0)
+# Start the optimization process in the local environment
+optimizer.start_locally()
+# wait until process is done (notice we are controlling the optimization process in the background)
+optimizer.wait()
+# make sure background optimization stopped
+optimizer.stop()
+
+print('We are done, good bye')
diff --git a/ipex/seg/utils/loggers/wandb/README.md b/ipex/seg/utils/loggers/wandb/README.md
new file mode 100644
index 000000000..d78324b4c
--- /dev/null
+++ b/ipex/seg/utils/loggers/wandb/README.md
@@ -0,0 +1,162 @@
+📚 This guide explains how to use **Weights & Biases** (W&B) with YOLOv5 🚀. UPDATED 29 September 2021.
+
+- [About Weights & Biases](#about-weights-&-biases)
+- [First-Time Setup](#first-time-setup)
+- [Viewing runs](#viewing-runs)
+- [Disabling wandb](#disabling-wandb)
+- [Advanced Usage: Dataset Versioning and Evaluation](#advanced-usage)
+- [Reports: Share your work with the world!](#reports)
+
+## About Weights & Biases
+
+Think of [W&B](https://wandb.ai/site?utm_campaign=repo_yolo_wandbtutorial) like GitHub for machine learning models. With a few lines of code, save everything you need to debug, compare and reproduce your models — architecture, hyperparameters, git commits, model weights, GPU usage, and even datasets and predictions.
+
+Used by top researchers including teams at OpenAI, Lyft, Github, and MILA, W&B is part of the new standard of best practices for machine learning. How W&B can help you optimize your machine learning workflows:
+
+- [Debug](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Free-2) model performance in real time
+- [GPU usage](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#System-4) visualized automatically
+- [Custom charts](https://wandb.ai/wandb/customizable-charts/reports/Powerful-Custom-Charts-To-Debug-Model-Peformance--VmlldzoyNzY4ODI) for powerful, extensible visualization
+- [Share insights](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Share-8) interactively with collaborators
+- [Optimize hyperparameters](https://docs.wandb.com/sweeps) efficiently
+- [Track](https://docs.wandb.com/artifacts) datasets, pipelines, and production models
+
+## First-Time Setup
+
+
+ Toggle Details
+When you first train, W&B will prompt you to create a new account and will generate an **API key** for you. If you are an existing user you can retrieve your key from https://wandb.ai/authorize. This key is used to tell W&B where to log your data. You only need to supply your key once, and then it is remembered on the same device.
+
+W&B will create a cloud **project** (default is 'YOLOv5') for your training runs, and each new training run will be provided a unique run **name** within that project as project/name. You can also manually set your project and run name as:
+
+```shell
+$ python train.py --project ... --name ...
+```
+
+YOLOv5 notebook example: 
 +
+ +
+
+
+
+
+## Viewing Runs
+
+
+ Toggle Details
+Run information streams from your environment to the W&B cloud console as you train. This allows you to monitor and even cancel runs in realtime . All important information is logged:
+
+- Training & Validation losses
+- Metrics: Precision, Recall, mAP@0.5, mAP@0.5:0.95
+- Learning Rate over time
+- A bounding box debugging panel, showing the training progress over time
+- GPU: Type, **GPU Utilization**, power, temperature, **CUDA memory usage**
+- System: Disk I/0, CPU utilization, RAM memory usage
+- Your trained model as W&B Artifact
+- Environment: OS and Python types, Git repository and state, **training command**
+
+
+
+
+## Disabling wandb
+
+- training after running `wandb disabled` inside that directory creates no wandb run
+ 
+
+- To enable wandb again, run `wandb online`
+ 
+
+## Advanced Usage
+
+You can leverage W&B artifacts and Tables integration to easily visualize and manage your datasets, models and training evaluations. Here are some quick examples to get you started.
+
+
+ 1: Train and Log Evaluation simultaneousy
+ This is an extension of the previous section, but it'll also training after uploading the dataset. This also evaluation Table
+ Evaluation table compares your predictions and ground truths across the validation set for each epoch. It uses the references to the already uploaded datasets,
+ so no images will be uploaded from your system more than once.
+
+ Usage
+ Code $ python train.py --upload_data val
+
+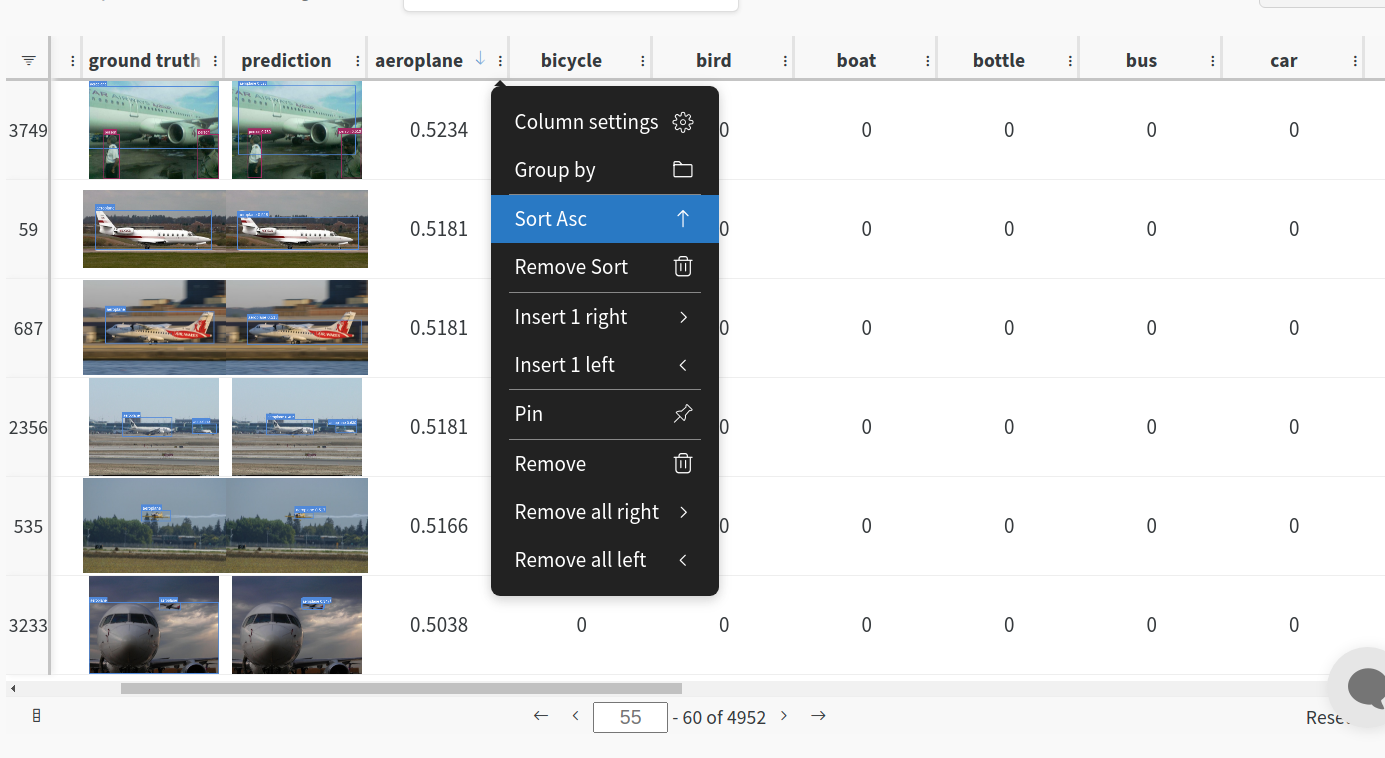
+
+
+
+2. Visualize and Version Datasets
+ Log, visualize, dynamically query, and understand your data with W&B Tables. You can use the following command to log your dataset as a W&B Table. This will generate a {dataset}_wandb.yaml file which can be used to train from dataset artifact.
+
+ Usage
+ Code $ python utils/logger/wandb/log_dataset.py --project ... --name ... --data ..
+
+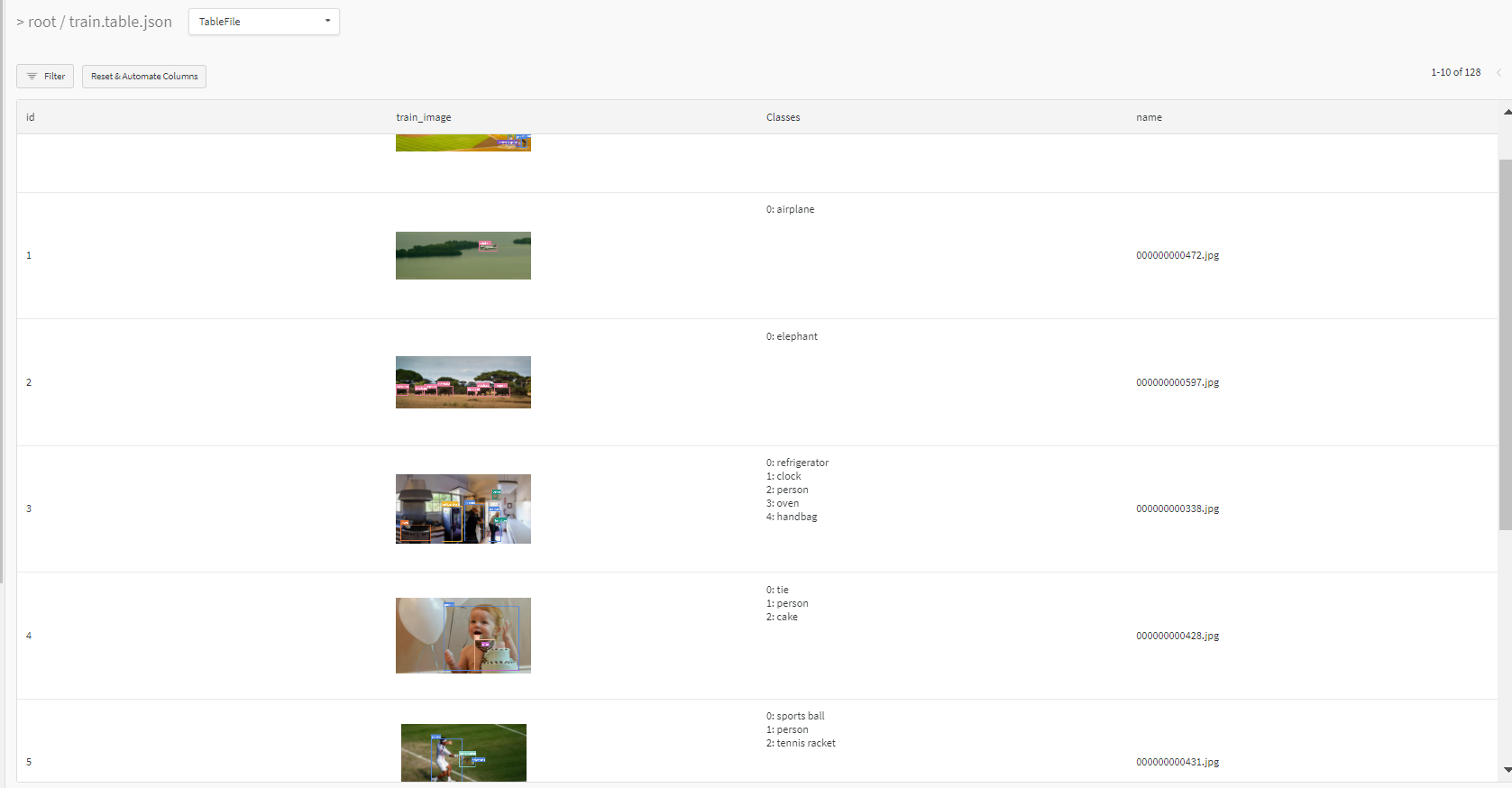
+
+
+
+ 3: Train using dataset artifact
+ When you upload a dataset as described in the first section, you get a new config file with an added `_wandb` to its name. This file contains the information that
+ can be used to train a model directly from the dataset artifact. This also logs evaluation
+
+ Usage
+ Code $ python train.py --data {data}_wandb.yaml
+
+
+
+
+
+ 4: Save model checkpoints as artifacts
+ To enable saving and versioning checkpoints of your experiment, pass `--save_period n` with the base cammand, where `n` represents checkpoint interval.
+ You can also log both the dataset and model checkpoints simultaneously. If not passed, only the final model will be logged
+
+
+ Usage
+ Code $ python train.py --save_period 1
+
+
+
+
+
+
+
+ 5: Resume runs from checkpoint artifacts.
+Any run can be resumed using artifacts if the --resume argument starts with wandb-artifact:// prefix followed by the run path, i.e, wandb-artifact://username/project/runid . This doesn't require the model checkpoint to be present on the local system.
+
+
+ Usage
+ Code $ python train.py --resume wandb-artifact://{run_path}
+
+
+
+
+
+ 6: Resume runs from dataset artifact & checkpoint artifacts.
+ Local dataset or model checkpoints are not required. This can be used to resume runs directly on a different device
+ The syntax is same as the previous section, but you'll need to lof both the dataset and model checkpoints as artifacts, i.e, set bot --upload_dataset or
+ train from _wandb.yaml file and set --save_period
+
+
+ Usage
+ Code $ python train.py --resume wandb-artifact://{run_path}
+
+
+
+
+
+
+
+ Reports
+W&B Reports can be created from your saved runs for sharing online. Once a report is created you will receive a link you can use to publically share your results. Here is an example report created from the COCO128 tutorial trainings of all four YOLOv5 models ([link](https://wandb.ai/glenn-jocher/yolov5_tutorial/reports/YOLOv5-COCO128-Tutorial-Results--VmlldzozMDI5OTY)).
+
+ +
+## Environments
+
+YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):
+
+- **Google Colab and Kaggle** notebooks with free GPU:
+- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
+- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
+- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
+
+## Environments
+
+YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):
+
+- **Google Colab and Kaggle** notebooks with free GPU:
+- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
+- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
+- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)  +
+## Status
+
+
+
+If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.
diff --git a/ipex/seg/utils/loggers/wandb/__init__.py b/ipex/seg/utils/loggers/wandb/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/ipex/seg/utils/loggers/wandb/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/ipex/seg/utils/loggers/wandb/log_dataset.py b/ipex/seg/utils/loggers/wandb/log_dataset.py
new file mode 100644
index 000000000..06e81fb69
--- /dev/null
+++ b/ipex/seg/utils/loggers/wandb/log_dataset.py
@@ -0,0 +1,27 @@
+import argparse
+
+from wandb_utils import WandbLogger
+
+from utils.general import LOGGER
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ logger = WandbLogger(opt, None, job_type='Dataset Creation') # TODO: return value unused
+ if not logger.wandb:
+ LOGGER.info("install wandb using `pip install wandb` to log the dataset")
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOv5', help='name of W&B Project')
+ parser.add_argument('--entity', default=None, help='W&B entity')
+ parser.add_argument('--name', type=str, default='log dataset', help='name of W&B run')
+
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/ipex/seg/utils/loggers/wandb/sweep.py b/ipex/seg/utils/loggers/wandb/sweep.py
new file mode 100644
index 000000000..d49ea6f27
--- /dev/null
+++ b/ipex/seg/utils/loggers/wandb/sweep.py
@@ -0,0 +1,41 @@
+import sys
+from pathlib import Path
+
+import wandb
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from train import parse_opt, train
+from utils.callbacks import Callbacks
+from utils.general import increment_path
+from utils.torch_utils import select_device
+
+
+def sweep():
+ wandb.init()
+ # Get hyp dict from sweep agent. Copy because train() modifies parameters which confused wandb.
+ hyp_dict = vars(wandb.config).get("_items").copy()
+
+ # Workaround: get necessary opt args
+ opt = parse_opt(known=True)
+ opt.batch_size = hyp_dict.get("batch_size")
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
+ opt.epochs = hyp_dict.get("epochs")
+ opt.nosave = True
+ opt.data = hyp_dict.get("data")
+ opt.weights = str(opt.weights)
+ opt.cfg = str(opt.cfg)
+ opt.data = str(opt.data)
+ opt.hyp = str(opt.hyp)
+ opt.project = str(opt.project)
+ device = select_device(opt.device, batch_size=opt.batch_size)
+
+ # train
+ train(hyp_dict, opt, device, callbacks=Callbacks())
+
+
+if __name__ == "__main__":
+ sweep()
diff --git a/ipex/seg/utils/loggers/wandb/sweep.yaml b/ipex/seg/utils/loggers/wandb/sweep.yaml
new file mode 100644
index 000000000..688b1ea02
--- /dev/null
+++ b/ipex/seg/utils/loggers/wandb/sweep.yaml
@@ -0,0 +1,143 @@
+# Hyperparameters for training
+# To set range-
+# Provide min and max values as:
+# parameter:
+#
+# min: scalar
+# max: scalar
+# OR
+#
+# Set a specific list of search space-
+# parameter:
+# values: [scalar1, scalar2, scalar3...]
+#
+# You can use grid, bayesian and hyperopt search strategy
+# For more info on configuring sweeps visit - https://docs.wandb.ai/guides/sweeps/configuration
+
+program: utils/loggers/wandb/sweep.py
+method: random
+metric:
+ name: metrics/mAP_0.5
+ goal: maximize
+
+parameters:
+ # hyperparameters: set either min, max range or values list
+ data:
+ value: "data/coco128.yaml"
+ batch_size:
+ values: [64]
+ epochs:
+ values: [10]
+
+ lr0:
+ distribution: uniform
+ min: 1e-5
+ max: 1e-1
+ lrf:
+ distribution: uniform
+ min: 0.01
+ max: 1.0
+ momentum:
+ distribution: uniform
+ min: 0.6
+ max: 0.98
+ weight_decay:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ warmup_epochs:
+ distribution: uniform
+ min: 0.0
+ max: 5.0
+ warmup_momentum:
+ distribution: uniform
+ min: 0.0
+ max: 0.95
+ warmup_bias_lr:
+ distribution: uniform
+ min: 0.0
+ max: 0.2
+ box:
+ distribution: uniform
+ min: 0.02
+ max: 0.2
+ cls:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ cls_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ obj:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ obj_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ iou_t:
+ distribution: uniform
+ min: 0.1
+ max: 0.7
+ anchor_t:
+ distribution: uniform
+ min: 2.0
+ max: 8.0
+ fl_gamma:
+ distribution: uniform
+ min: 0.0
+ max: 4.0
+ hsv_h:
+ distribution: uniform
+ min: 0.0
+ max: 0.1
+ hsv_s:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ hsv_v:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ degrees:
+ distribution: uniform
+ min: 0.0
+ max: 45.0
+ translate:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ scale:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ shear:
+ distribution: uniform
+ min: 0.0
+ max: 10.0
+ perspective:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ flipud:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ fliplr:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mosaic:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mixup:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ copy_paste:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
diff --git a/ipex/seg/utils/loggers/wandb/wandb_utils.py b/ipex/seg/utils/loggers/wandb/wandb_utils.py
new file mode 100644
index 000000000..e850d2ac8
--- /dev/null
+++ b/ipex/seg/utils/loggers/wandb/wandb_utils.py
@@ -0,0 +1,584 @@
+"""Utilities and tools for tracking runs with Weights & Biases."""
+
+import logging
+import os
+import sys
+from contextlib import contextmanager
+from pathlib import Path
+from typing import Dict
+
+import yaml
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from utils.dataloaders import LoadImagesAndLabels, img2label_paths
+from utils.general import LOGGER, check_dataset, check_file
+
+try:
+ import wandb
+
+ assert hasattr(wandb, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ wandb = None
+
+RANK = int(os.getenv('RANK', -1))
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):
+ return from_string[len(prefix):]
+
+
+def check_wandb_config_file(data_config_file):
+ wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path
+ if Path(wandb_config).is_file():
+ return wandb_config
+ return data_config_file
+
+
+def check_wandb_dataset(data_file):
+ is_trainset_wandb_artifact = False
+ is_valset_wandb_artifact = False
+ if isinstance(data_file, dict):
+ # In that case another dataset manager has already processed it and we don't have to
+ return data_file
+ if check_file(data_file) and data_file.endswith('.yaml'):
+ with open(data_file, errors='ignore') as f:
+ data_dict = yaml.safe_load(f)
+ is_trainset_wandb_artifact = isinstance(data_dict['train'],
+ str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX)
+ is_valset_wandb_artifact = isinstance(data_dict['val'],
+ str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX)
+ if is_trainset_wandb_artifact or is_valset_wandb_artifact:
+ return data_dict
+ else:
+ return check_dataset(data_file)
+
+
+def get_run_info(run_path):
+ run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))
+ run_id = run_path.stem
+ project = run_path.parent.stem
+ entity = run_path.parent.parent.stem
+ model_artifact_name = 'run_' + run_id + '_model'
+ return entity, project, run_id, model_artifact_name
+
+
+def check_wandb_resume(opt):
+ process_wandb_config_ddp_mode(opt) if RANK not in [-1, 0] else None
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ if RANK not in [-1, 0]: # For resuming DDP runs
+ entity, project, run_id, model_artifact_name = get_run_info(opt.resume)
+ api = wandb.Api()
+ artifact = api.artifact(entity + '/' + project + '/' + model_artifact_name + ':latest')
+ modeldir = artifact.download()
+ opt.weights = str(Path(modeldir) / "last.pt")
+ return True
+ return None
+
+
+def process_wandb_config_ddp_mode(opt):
+ with open(check_file(opt.data), errors='ignore') as f:
+ data_dict = yaml.safe_load(f) # data dict
+ train_dir, val_dir = None, None
+ if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)
+ train_dir = train_artifact.download()
+ train_path = Path(train_dir) / 'data/images/'
+ data_dict['train'] = str(train_path)
+
+ if isinstance(data_dict['val'], str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ val_artifact = api.artifact(remove_prefix(data_dict['val']) + ':' + opt.artifact_alias)
+ val_dir = val_artifact.download()
+ val_path = Path(val_dir) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ if train_dir or val_dir:
+ ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')
+ with open(ddp_data_path, 'w') as f:
+ yaml.safe_dump(data_dict, f)
+ opt.data = ddp_data_path
+
+
+class WandbLogger():
+ """Log training runs, datasets, models, and predictions to Weights & Biases.
+
+ This logger sends information to W&B at wandb.ai. By default, this information
+ includes hyperparameters, system configuration and metrics, model metrics,
+ and basic data metrics and analyses.
+
+ By providing additional command line arguments to train.py, datasets,
+ models and predictions can also be logged.
+
+ For more on how this logger is used, see the Weights & Biases documentation:
+ https://docs.wandb.com/guides/integrations/yolov5
+ """
+
+ def __init__(self, opt, run_id=None, job_type='Training'):
+ """
+ - Initialize WandbLogger instance
+ - Upload dataset if opt.upload_dataset is True
+ - Setup training processes if job_type is 'Training'
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ run_id (str) -- Run ID of W&B run to be resumed
+ job_type (str) -- To set the job_type for this run
+
+ """
+ # Pre-training routine --
+ self.job_type = job_type
+ self.wandb, self.wandb_run = wandb, None if not wandb else wandb.run
+ self.val_artifact, self.train_artifact = None, None
+ self.train_artifact_path, self.val_artifact_path = None, None
+ self.result_artifact = None
+ self.val_table, self.result_table = None, None
+ self.bbox_media_panel_images = []
+ self.val_table_path_map = None
+ self.max_imgs_to_log = 16
+ self.wandb_artifact_data_dict = None
+ self.data_dict = None
+ # It's more elegant to stick to 1 wandb.init call,
+ # but useful config data is overwritten in the WandbLogger's wandb.init call
+ if isinstance(opt.resume, str): # checks resume from artifact
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ entity, project, run_id, model_artifact_name = get_run_info(opt.resume)
+ model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name
+ assert wandb, 'install wandb to resume wandb runs'
+ # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config
+ self.wandb_run = wandb.init(id=run_id,
+ project=project,
+ entity=entity,
+ resume='allow',
+ allow_val_change=True)
+ opt.resume = model_artifact_name
+ elif self.wandb:
+ self.wandb_run = wandb.init(config=opt,
+ resume="allow",
+ project='YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem,
+ entity=opt.entity,
+ name=opt.name if opt.name != 'exp' else None,
+ job_type=job_type,
+ id=run_id,
+ allow_val_change=True) if not wandb.run else wandb.run
+ if self.wandb_run:
+ if self.job_type == 'Training':
+ if opt.upload_dataset:
+ if not opt.resume:
+ self.wandb_artifact_data_dict = self.check_and_upload_dataset(opt)
+
+ if isinstance(opt.data, dict):
+ # This means another dataset manager has already processed the dataset info (e.g. ClearML)
+ # and they will have stored the already processed dict in opt.data
+ self.data_dict = opt.data
+ elif opt.resume:
+ # resume from artifact
+ if isinstance(opt.resume, str) and opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ self.data_dict = dict(self.wandb_run.config.data_dict)
+ else: # local resume
+ self.data_dict = check_wandb_dataset(opt.data)
+ else:
+ self.data_dict = check_wandb_dataset(opt.data)
+ self.wandb_artifact_data_dict = self.wandb_artifact_data_dict or self.data_dict
+
+ # write data_dict to config. useful for resuming from artifacts. Do this only when not resuming.
+ self.wandb_run.config.update({'data_dict': self.wandb_artifact_data_dict}, allow_val_change=True)
+ self.setup_training(opt)
+
+ if self.job_type == 'Dataset Creation':
+ self.wandb_run.config.update({"upload_dataset": True})
+ self.data_dict = self.check_and_upload_dataset(opt)
+
+ def check_and_upload_dataset(self, opt):
+ """
+ Check if the dataset format is compatible and upload it as W&B artifact
+
+ arguments:
+ opt (namespace)-- Commandline arguments for current run
+
+ returns:
+ Updated dataset info dictionary where local dataset paths are replaced by WAND_ARFACT_PREFIX links.
+ """
+ assert wandb, 'Install wandb to upload dataset'
+ config_path = self.log_dataset_artifact(opt.data, opt.single_cls,
+ 'YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem)
+ with open(config_path, errors='ignore') as f:
+ wandb_data_dict = yaml.safe_load(f)
+ return wandb_data_dict
+
+ def setup_training(self, opt):
+ """
+ Setup the necessary processes for training YOLO models:
+ - Attempt to download model checkpoint and dataset artifacts if opt.resume stats with WANDB_ARTIFACT_PREFIX
+ - Update data_dict, to contain info of previous run if resumed and the paths of dataset artifact if downloaded
+ - Setup log_dict, initialize bbox_interval
+
+ arguments:
+ opt (namespace) -- commandline arguments for this run
+
+ """
+ self.log_dict, self.current_epoch = {}, 0
+ self.bbox_interval = opt.bbox_interval
+ if isinstance(opt.resume, str):
+ modeldir, _ = self.download_model_artifact(opt)
+ if modeldir:
+ self.weights = Path(modeldir) / "last.pt"
+ config = self.wandb_run.config
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp, opt.imgsz = str(
+ self.weights), config.save_period, config.batch_size, config.bbox_interval, config.epochs,\
+ config.hyp, config.imgsz
+ data_dict = self.data_dict
+ if self.val_artifact is None: # If --upload_dataset is set, use the existing artifact, don't download
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(
+ data_dict.get('train'), opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(
+ data_dict.get('val'), opt.artifact_alias)
+
+ if self.train_artifact_path is not None:
+ train_path = Path(self.train_artifact_path) / 'data/images/'
+ data_dict['train'] = str(train_path)
+ if self.val_artifact_path is not None:
+ val_path = Path(self.val_artifact_path) / 'data/images/'
+ data_dict['val'] = str(val_path)
+
+ if self.val_artifact is not None:
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+ columns = ["epoch", "id", "ground truth", "prediction"]
+ columns.extend(self.data_dict['names'])
+ self.result_table = wandb.Table(columns)
+ self.val_table = self.val_artifact.get("val")
+ if self.val_table_path_map is None:
+ self.map_val_table_path()
+ if opt.bbox_interval == -1:
+ self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ if opt.evolve or opt.noplots:
+ self.bbox_interval = opt.bbox_interval = opt.epochs + 1 # disable bbox_interval
+ train_from_artifact = self.train_artifact_path is not None and self.val_artifact_path is not None
+ # Update the the data_dict to point to local artifacts dir
+ if train_from_artifact:
+ self.data_dict = data_dict
+
+ def download_dataset_artifact(self, path, alias):
+ """
+ download the model checkpoint artifact if the path starts with WANDB_ARTIFACT_PREFIX
+
+ arguments:
+ path -- path of the dataset to be used for training
+ alias (str)-- alias of the artifact to be download/used for training
+
+ returns:
+ (str, wandb.Artifact) -- path of the downladed dataset and it's corresponding artifact object if dataset
+ is found otherwise returns (None, None)
+ """
+ if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):
+ artifact_path = Path(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + ":" + alias)
+ dataset_artifact = wandb.use_artifact(artifact_path.as_posix().replace("\\", "/"))
+ assert dataset_artifact is not None, "'Error: W&B dataset artifact doesn\'t exist'"
+ datadir = dataset_artifact.download()
+ return datadir, dataset_artifact
+ return None, None
+
+ def download_model_artifact(self, opt):
+ """
+ download the model checkpoint artifact if the resume path starts with WANDB_ARTIFACT_PREFIX
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ """
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
+ assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
+ modeldir = model_artifact.download()
+ # epochs_trained = model_artifact.metadata.get('epochs_trained')
+ total_epochs = model_artifact.metadata.get('total_epochs')
+ is_finished = total_epochs is None
+ assert not is_finished, 'training is finished, can only resume incomplete runs.'
+ return modeldir, model_artifact
+ return None, None
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ """
+ Log the model checkpoint as W&B artifact
+
+ arguments:
+ path (Path) -- Path of directory containing the checkpoints
+ opt (namespace) -- Command line arguments for this run
+ epoch (int) -- Current epoch number
+ fitness_score (float) -- fitness score for current epoch
+ best_model (boolean) -- Boolean representing if the current checkpoint is the best yet.
+ """
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model',
+ type='model',
+ metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score})
+ model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
+ wandb.log_artifact(model_artifact,
+ aliases=['latest', 'last', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
+ LOGGER.info(f"Saving model artifact on epoch {epoch + 1}")
+
+ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):
+ """
+ Log the dataset as W&B artifact and return the new data file with W&B links
+
+ arguments:
+ data_file (str) -- the .yaml file with information about the dataset like - path, classes etc.
+ single_class (boolean) -- train multi-class data as single-class
+ project (str) -- project name. Used to construct the artifact path
+ overwrite_config (boolean) -- overwrites the data.yaml file if set to true otherwise creates a new
+ file with _wandb postfix. Eg -> data_wandb.yaml
+
+ returns:
+ the new .yaml file with artifact links. it can be used to start training directly from artifacts
+ """
+ upload_dataset = self.wandb_run.config.upload_dataset
+ log_val_only = isinstance(upload_dataset, str) and upload_dataset == 'val'
+ self.data_dict = check_dataset(data_file) # parse and check
+ data = dict(self.data_dict)
+ nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])
+ names = {k: v for k, v in enumerate(names)} # to index dictionary
+
+ # log train set
+ if not log_val_only:
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(data['train'], rect=True, batch_size=1),
+ names,
+ name='train') if data.get('train') else None
+ if data.get('train'):
+ data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
+
+ self.val_artifact = self.create_dataset_table(
+ LoadImagesAndLabels(data['val'], rect=True, batch_size=1), names, name='val') if data.get('val') else None
+ if data.get('val'):
+ data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
+
+ path = Path(data_file)
+ # create a _wandb.yaml file with artifacts links if both train and test set are logged
+ if not log_val_only:
+ path = (path.stem if overwrite_config else path.stem + '_wandb') + '.yaml' # updated data.yaml path
+ path = ROOT / 'data' / path
+ data.pop('download', None)
+ data.pop('path', None)
+ with open(path, 'w') as f:
+ yaml.safe_dump(data, f)
+ LOGGER.info(f"Created dataset config file {path}")
+
+ if self.job_type == 'Training': # builds correct artifact pipeline graph
+ if not log_val_only:
+ self.wandb_run.log_artifact(
+ self.train_artifact) # calling use_artifact downloads the dataset. NOT NEEDED!
+ self.wandb_run.use_artifact(self.val_artifact)
+ self.val_artifact.wait()
+ self.val_table = self.val_artifact.get('val')
+ self.map_val_table_path()
+ else:
+ self.wandb_run.log_artifact(self.train_artifact)
+ self.wandb_run.log_artifact(self.val_artifact)
+ return path
+
+ def map_val_table_path(self):
+ """
+ Map the validation dataset Table like name of file -> it's id in the W&B Table.
+ Useful for - referencing artifacts for evaluation.
+ """
+ self.val_table_path_map = {}
+ LOGGER.info("Mapping dataset")
+ for i, data in enumerate(tqdm(self.val_table.data)):
+ self.val_table_path_map[data[3]] = data[0]
+
+ def create_dataset_table(self, dataset: LoadImagesAndLabels, class_to_id: Dict[int, str], name: str = 'dataset'):
+ """
+ Create and return W&B artifact containing W&B Table of the dataset.
+
+ arguments:
+ dataset -- instance of LoadImagesAndLabels class used to iterate over the data to build Table
+ class_to_id -- hash map that maps class ids to labels
+ name -- name of the artifact
+
+ returns:
+ dataset artifact to be logged or used
+ """
+ # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
+ artifact = wandb.Artifact(name=name, type="dataset")
+ img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
+ img_files = tqdm(dataset.im_files) if not img_files else img_files
+ for img_file in img_files:
+ if Path(img_file).is_dir():
+ artifact.add_dir(img_file, name='data/images')
+ labels_path = 'labels'.join(dataset.path.rsplit('images', 1))
+ artifact.add_dir(labels_path, name='data/labels')
+ else:
+ artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
+ label_file = Path(img2label_paths([img_file])[0])
+ artifact.add_file(str(label_file), name='data/labels/' +
+ label_file.name) if label_file.exists() else None
+ table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
+ for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
+ box_data, img_classes = [], {}
+ for cls, *xywh in labels[:, 1:].tolist():
+ cls = int(cls)
+ box_data.append({
+ "position": {
+ "middle": [xywh[0], xywh[1]],
+ "width": xywh[2],
+ "height": xywh[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls])})
+ img_classes[cls] = class_to_id[cls]
+ boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
+ table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), list(img_classes.values()),
+ Path(paths).name)
+ artifact.add(table, name)
+ return artifact
+
+ def log_training_progress(self, predn, path, names):
+ """
+ Build evaluation Table. Uses reference from validation dataset table.
+
+ arguments:
+ predn (list): list of predictions in the native space in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ path (str): local path of the current evaluation image
+ names (dict(int, str)): hash map that maps class ids to labels
+ """
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])
+ box_data = []
+ avg_conf_per_class = [0] * len(self.data_dict['names'])
+ pred_class_count = {}
+ for *xyxy, conf, cls in predn.tolist():
+ if conf >= 0.25:
+ cls = int(cls)
+ box_data.append({
+ "position": {
+ "minX": xyxy[0],
+ "minY": xyxy[1],
+ "maxX": xyxy[2],
+ "maxY": xyxy[3]},
+ "class_id": cls,
+ "box_caption": f"{names[cls]} {conf:.3f}",
+ "scores": {
+ "class_score": conf},
+ "domain": "pixel"})
+ avg_conf_per_class[cls] += conf
+
+ if cls in pred_class_count:
+ pred_class_count[cls] += 1
+ else:
+ pred_class_count[cls] = 1
+
+ for pred_class in pred_class_count.keys():
+ avg_conf_per_class[pred_class] = avg_conf_per_class[pred_class] / pred_class_count[pred_class]
+
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ id = self.val_table_path_map[Path(path).name]
+ self.result_table.add_data(self.current_epoch, id, self.val_table.data[id][1],
+ wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
+ *avg_conf_per_class)
+
+ def val_one_image(self, pred, predn, path, names, im):
+ """
+ Log validation data for one image. updates the result Table if validation dataset is uploaded and log bbox media panel
+
+ arguments:
+ pred (list): list of scaled predictions in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ predn (list): list of predictions in the native space - [xmin, ymin, xmax, ymax, confidence, class]
+ path (str): local path of the current evaluation image
+ """
+ if self.val_table and self.result_table: # Log Table if Val dataset is uploaded as artifact
+ self.log_training_progress(predn, path, names)
+
+ if len(self.bbox_media_panel_images) < self.max_imgs_to_log and self.current_epoch > 0:
+ if self.current_epoch % self.bbox_interval == 0:
+ box_data = [{
+ "position": {
+ "minX": xyxy[0],
+ "minY": xyxy[1],
+ "maxX": xyxy[2],
+ "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": f"{names[int(cls)]} {conf:.3f}",
+ "scores": {
+ "class_score": conf},
+ "domain": "pixel"} for *xyxy, conf, cls in pred.tolist()]
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ self.bbox_media_panel_images.append(wandb.Image(im, boxes=boxes, caption=path.name))
+
+ def log(self, log_dict):
+ """
+ save the metrics to the logging dictionary
+
+ arguments:
+ log_dict (Dict) -- metrics/media to be logged in current step
+ """
+ if self.wandb_run:
+ for key, value in log_dict.items():
+ self.log_dict[key] = value
+
+ def end_epoch(self, best_result=False):
+ """
+ commit the log_dict, model artifacts and Tables to W&B and flush the log_dict.
+
+ arguments:
+ best_result (boolean): Boolean representing if the result of this evaluation is best or not
+ """
+ if self.wandb_run:
+ with all_logging_disabled():
+ if self.bbox_media_panel_images:
+ self.log_dict["BoundingBoxDebugger"] = self.bbox_media_panel_images
+ try:
+ wandb.log(self.log_dict)
+ except BaseException as e:
+ LOGGER.info(
+ f"An error occurred in wandb logger. The training will proceed without interruption. More info\n{e}"
+ )
+ self.wandb_run.finish()
+ self.wandb_run = None
+
+ self.log_dict = {}
+ self.bbox_media_panel_images = []
+ if self.result_artifact:
+ self.result_artifact.add(self.result_table, 'result')
+ wandb.log_artifact(self.result_artifact,
+ aliases=[
+ 'latest', 'last', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
+
+ wandb.log({"evaluation": self.result_table})
+ columns = ["epoch", "id", "ground truth", "prediction"]
+ columns.extend(self.data_dict['names'])
+ self.result_table = wandb.Table(columns)
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+
+ def finish_run(self):
+ """
+ Log metrics if any and finish the current W&B run
+ """
+ if self.wandb_run:
+ if self.log_dict:
+ with all_logging_disabled():
+ wandb.log(self.log_dict)
+ wandb.run.finish()
+
+
+@contextmanager
+def all_logging_disabled(highest_level=logging.CRITICAL):
+ """ source - https://gist.github.com/simon-weber/7853144
+ A context manager that will prevent any logging messages triggered during the body from being processed.
+ :param highest_level: the maximum logging level in use.
+ This would only need to be changed if a custom level greater than CRITICAL is defined.
+ """
+ previous_level = logging.root.manager.disable
+ logging.disable(highest_level)
+ try:
+ yield
+ finally:
+ logging.disable(previous_level)
diff --git a/ipex/seg/utils/loss.py b/ipex/seg/utils/loss.py
new file mode 100644
index 000000000..9b9c3d9f8
--- /dev/null
+++ b/ipex/seg/utils/loss.py
@@ -0,0 +1,234 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Loss functions
+"""
+
+import torch
+import torch.nn as nn
+
+from utils.metrics import bbox_iou
+from utils.torch_utils import de_parallel
+
+
+def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
+ # return positive, negative label smoothing BCE targets
+ return 1.0 - 0.5 * eps, 0.5 * eps
+
+
+class BCEBlurWithLogitsLoss(nn.Module):
+ # BCEwithLogitLoss() with reduced missing label effects.
+ def __init__(self, alpha=0.05):
+ super().__init__()
+ self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
+ self.alpha = alpha
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ pred = torch.sigmoid(pred) # prob from logits
+ dx = pred - true # reduce only missing label effects
+ # dx = (pred - true).abs() # reduce missing label and false label effects
+ alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
+ loss *= alpha_factor
+ return loss.mean()
+
+
+class FocalLoss(nn.Module):
+ # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super().__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ # p_t = torch.exp(-loss)
+ # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
+
+ # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = (1.0 - p_t) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class QFocalLoss(nn.Module):
+ # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super().__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = torch.abs(true - pred_prob) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class ComputeLoss:
+ sort_obj_iou = False
+
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ m = de_parallel(model).model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
+ self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
+ self.na = m.na # number of anchors
+ self.nc = m.nc # number of classes
+ self.nl = m.nl # number of layers
+ self.anchors = m.anchors
+ self.device = device
+
+ def __call__(self, p, targets): # predictions, targets
+ lcls = torch.zeros(1, device=self.device) # class loss
+ lbox = torch.zeros(1, device=self.device) # box loss
+ lobj = torch.zeros(1, device=self.device) # object loss
+ tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ # pxy, pwh, _, pcls = pi[b, a, gj, gi].tensor_split((2, 4, 5), dim=1) # faster, requires torch 1.8.0
+ pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions
+
+ # Regression
+ pxy = pxy.sigmoid() * 2 - 0.5
+ pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ iou = iou.detach().clamp(0).type(tobj.dtype)
+ if self.sort_obj_iou:
+ j = iou.argsort()
+ b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
+ if self.gr < 1:
+ iou = (1.0 - self.gr) + self.gr * iou
+ tobj[b, a, gj, gi] = iou # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(pcls, self.cn, device=self.device) # targets
+ t[range(n), tcls[i]] = self.cp
+ lcls += self.BCEcls(pcls, t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch = [], [], [], []
+ gain = torch.ones(7, device=self.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor(
+ [
+ [0, 0],
+ [1, 0],
+ [0, 1],
+ [-1, 0],
+ [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ],
+ device=self.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors, shape = self.anchors[i], p[i].shape
+ gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain # shape(3,n,7)
+ if nt:
+ # Matches
+ r = t[..., 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1 < g) & (gxy > 1)).T
+ l, m = ((gxi % 1 < g) & (gxi > 1)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ bc, gxy, gwh, a = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
+ a, (b, c) = a.long().view(-1), bc.long().T # anchors, image, class
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid indices
+
+ # Append
+ indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+
+ return tcls, tbox, indices, anch
diff --git a/ipex/seg/utils/metrics.py b/ipex/seg/utils/metrics.py
new file mode 100644
index 000000000..7bd252167
--- /dev/null
+++ b/ipex/seg/utils/metrics.py
@@ -0,0 +1,367 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Model validation metrics
+"""
+
+import math
+import warnings
+from pathlib import Path
+
+import matplotlib.pyplot as plt
+import numpy as np
+import torch
+
+from utils import TryExcept, threaded
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
+ return (x[:, :4] * w).sum(1)
+
+
+def smooth(y, f=0.05):
+ # Box filter of fraction f
+ nf = round(len(y) * f * 2) // 2 + 1 # number of filter elements (must be odd)
+ p = np.ones(nf // 2) # ones padding
+ yp = np.concatenate((p * y[0], y, p * y[-1]), 0) # y padded
+ return np.convolve(yp, np.ones(nf) / nf, mode='valid') # y-smoothed
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16, prefix=""):
+ """ Compute the average precision, given the recall and precision curves.
+ Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
+ # Arguments
+ tp: True positives (nparray, nx1 or nx10).
+ conf: Objectness value from 0-1 (nparray).
+ pred_cls: Predicted object classes (nparray).
+ target_cls: True object classes (nparray).
+ plot: Plot precision-recall curve at mAP@0.5
+ save_dir: Plot save directory
+ # Returns
+ The average precision as computed in py-faster-rcnn.
+ """
+
+ # Sort by objectness
+ i = np.argsort(-conf)
+ tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
+
+ # Find unique classes
+ unique_classes, nt = np.unique(target_cls, return_counts=True)
+ nc = unique_classes.shape[0] # number of classes, number of detections
+
+ # Create Precision-Recall curve and compute AP for each class
+ px, py = np.linspace(0, 1, 1000), [] # for plotting
+ ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
+ for ci, c in enumerate(unique_classes):
+ i = pred_cls == c
+ n_l = nt[ci] # number of labels
+ n_p = i.sum() # number of predictions
+ if n_p == 0 or n_l == 0:
+ continue
+
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + eps) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+
+ # Compute F1 (harmonic mean of precision and recall)
+ f1 = 2 * p * r / (p + r + eps)
+ names = [v for k, v in names.items() if k in unique_classes] # list: only classes that have data
+ names = dict(enumerate(names)) # to dict
+ if plot:
+ plot_pr_curve(px, py, ap, Path(save_dir) / f'{prefix}PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / f'{prefix}F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / f'{prefix}P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / f'{prefix}R_curve.png', names, ylabel='Recall')
+
+ i = smooth(f1.mean(0), 0.1).argmax() # max F1 index
+ p, r, f1 = p[:, i], r[:, i], f1[:, i]
+ tp = (r * nt).round() # true positives
+ fp = (tp / (p + eps) - tp).round() # false positives
+ return tp, fp, p, r, f1, ap, unique_classes.astype(int)
+
+
+def compute_ap(recall, precision):
+ """ Compute the average precision, given the recall and precision curves
+ # Arguments
+ recall: The recall curve (list)
+ precision: The precision curve (list)
+ # Returns
+ Average precision, precision curve, recall curve
+ """
+
+ # Append sentinel values to beginning and end
+ mrec = np.concatenate(([0.0], recall, [1.0]))
+ mpre = np.concatenate(([1.0], precision, [0.0]))
+
+ # Compute the precision envelope
+ mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
+
+ # Integrate area under curve
+ method = 'interp' # methods: 'continuous', 'interp'
+ if method == 'interp':
+ x = np.linspace(0, 1, 101) # 101-point interp (COCO)
+ ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
+ else: # 'continuous'
+ i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
+ ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
+
+ return ap, mpre, mrec
+
+
+class ConfusionMatrix:
+ # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
+ def __init__(self, nc, conf=0.25, iou_thres=0.45):
+ self.matrix = np.zeros((nc + 1, nc + 1))
+ self.nc = nc # number of classes
+ self.conf = conf
+ self.iou_thres = iou_thres
+
+ def process_batch(self, detections, labels):
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ None, updates confusion matrix accordingly
+ """
+ if detections is None:
+ gt_classes = labels.int()
+ for gc in gt_classes:
+ self.matrix[self.nc, gc] += 1 # background FN
+ return
+
+ detections = detections[detections[:, 4] > self.conf]
+ gt_classes = labels[:, 0].int()
+ detection_classes = detections[:, 5].int()
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+
+ x = torch.where(iou > self.iou_thres)
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ else:
+ matches = np.zeros((0, 3))
+
+ n = matches.shape[0] > 0
+ m0, m1, _ = matches.transpose().astype(int)
+ for i, gc in enumerate(gt_classes):
+ j = m0 == i
+ if n and sum(j) == 1:
+ self.matrix[detection_classes[m1[j]], gc] += 1 # correct
+ else:
+ self.matrix[self.nc, gc] += 1 # background FP
+
+ if n:
+ for i, dc in enumerate(detection_classes):
+ if not any(m1 == i):
+ self.matrix[dc, self.nc] += 1 # background FN
+
+ def matrix(self):
+ return self.matrix
+
+ def tp_fp(self):
+ tp = self.matrix.diagonal() # true positives
+ fp = self.matrix.sum(1) - tp # false positives
+ # fn = self.matrix.sum(0) - tp # false negatives (missed detections)
+ return tp[:-1], fp[:-1] # remove background class
+
+ @TryExcept('WARNING: ConfusionMatrix plot failure')
+ def plot(self, normalize=True, save_dir='', names=()):
+ import seaborn as sn
+
+ array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-9) if normalize else 1) # normalize columns
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig, ax = plt.subplots(1, 1, figsize=(12, 9), tight_layout=True)
+ nc, nn = self.nc, len(names) # number of classes, names
+ sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size
+ labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
+ sn.heatmap(array,
+ ax=ax,
+ annot=nc < 30,
+ annot_kws={
+ "size": 8},
+ cmap='Blues',
+ fmt='.2f',
+ square=True,
+ vmin=0.0,
+ xticklabels=names + ['background FP'] if labels else "auto",
+ yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
+ ax.set_ylabel('True')
+ ax.set_ylabel('Predicted')
+ ax.set_title('Confusion Matrix')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ plt.close(fig)
+
+ def print(self):
+ for i in range(self.nc + 1):
+ print(' '.join(map(str, self.matrix[i])))
+
+
+def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)
+
+ # Get the coordinates of bounding boxes
+ if xywh: # transform from xywh to xyxy
+ (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, 1), box2.chunk(4, 1)
+ w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
+ b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
+ b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
+ else: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, 1)
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, 1)
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ # IoU
+ iou = inter / union
+ if CIoU or DIoU or GIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2
+ if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
+ with torch.no_grad():
+ alpha = v / (v - iou + (1 + eps))
+ return iou - (rho2 / c2 + v * alpha) # CIoU
+ return iou - rho2 / c2 # DIoU
+ c_area = cw * ch + eps # convex area
+ return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ return iou # IoU
+
+
+def box_area(box):
+ # box = xyxy(4,n)
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+
+def box_iou(box1, box2, eps=1e-7):
+ # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ box1 (Tensor[N, 4])
+ box2 (Tensor[M, 4])
+ Returns:
+ iou (Tensor[N, M]): the NxM matrix containing the pairwise
+ IoU values for every element in boxes1 and boxes2
+ """
+
+ # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
+ (a1, a2), (b1, b2) = box1[:, None].chunk(2, 2), box2.chunk(2, 1)
+ inter = (torch.min(a2, b2) - torch.max(a1, b1)).clamp(0).prod(2)
+
+ # IoU = inter / (area1 + area2 - inter)
+ return inter / (box_area(box1.T)[:, None] + box_area(box2.T) - inter + eps)
+
+
+def bbox_ioa(box1, box2, eps=1e-7):
+ """ Returns the intersection over box2 area given box1, box2. Boxes are x1y1x2y2
+ box1: np.array of shape(4)
+ box2: np.array of shape(nx4)
+ returns: np.array of shape(n)
+ """
+
+ # Get the coordinates of bounding boxes
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.T
+
+ # Intersection area
+ inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
+ (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)
+
+ # box2 area
+ box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + eps
+
+ # Intersection over box2 area
+ return inter_area / box2_area
+
+
+def wh_iou(wh1, wh2, eps=1e-7):
+ # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
+ wh1 = wh1[:, None] # [N,1,2]
+ wh2 = wh2[None] # [1,M,2]
+ inter = torch.min(wh1, wh2).prod(2) # [N,M]
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter + eps) # iou = inter / (area1 + area2 - inter)
+
+
+# Plots ----------------------------------------------------------------------------------------------------------------
+
+
+@threaded
+def plot_pr_curve(px, py, ap, save_dir=Path('pr_curve.png'), names=()):
+ # Precision-recall curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+ py = np.stack(py, axis=1)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py.T):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)
+ else:
+ ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)
+
+ ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())
+ ax.set_xlabel('Recall')
+ ax.set_ylabel('Precision')
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ ax.set_title('Precision-Recall Curve')
+ fig.savefig(save_dir, dpi=250)
+ plt.close(fig)
+
+
+@threaded
+def plot_mc_curve(px, py, save_dir=Path('mc_curve.png'), names=(), xlabel='Confidence', ylabel='Metric'):
+ # Metric-confidence curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)
+ else:
+ ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
+
+ y = smooth(py.mean(0), 0.05)
+ ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
+ ax.set_xlabel(xlabel)
+ ax.set_ylabel(ylabel)
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ ax.set_title(f'{ylabel}-Confidence Curve')
+ fig.savefig(save_dir, dpi=250)
+ plt.close(fig)
diff --git a/ipex/seg/utils/plots.py b/ipex/seg/utils/plots.py
new file mode 100644
index 000000000..dd1c072a8
--- /dev/null
+++ b/ipex/seg/utils/plots.py
@@ -0,0 +1,529 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Plotting utils
+"""
+
+import contextlib
+import math
+import os
+from copy import copy
+from pathlib import Path
+from urllib.error import URLError
+
+import cv2
+import matplotlib
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import seaborn as sn
+import torch
+from PIL import Image, ImageDraw, ImageFont
+
+from utils import TryExcept, threaded
+from utils.general import (CONFIG_DIR, FONT, LOGGER, check_font, check_requirements, clip_coords, increment_path,
+ is_ascii, xywh2xyxy, xyxy2xywh)
+from utils.metrics import fitness
+
+# Settings
+RANK = int(os.getenv('RANK', -1))
+matplotlib.rc('font', **{'size': 11})
+matplotlib.use('Agg') # for writing to files only
+
+
+class Colors:
+ # Ultralytics color palette https://ultralytics.com/
+ def __init__(self):
+ # hex = matplotlib.colors.TABLEAU_COLORS.values()
+ hexs = ('FF3838', 'FF9D97', 'FF701F', 'FFB21D', 'CFD231', '48F90A', '92CC17', '3DDB86', '1A9334', '00D4BB',
+ '2C99A8', '00C2FF', '344593', '6473FF', '0018EC', '8438FF', '520085', 'CB38FF', 'FF95C8', 'FF37C7')
+ self.palette = [self.hex2rgb(f'#{c}') for c in hexs]
+ self.n = len(self.palette)
+
+ def __call__(self, i, bgr=False):
+ c = self.palette[int(i) % self.n]
+ return (c[2], c[1], c[0]) if bgr else c
+
+ @staticmethod
+ def hex2rgb(h): # rgb order (PIL)
+ return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))
+
+
+colors = Colors() # create instance for 'from utils.plots import colors'
+
+
+def check_pil_font(font=FONT, size=10):
+ # Return a PIL TrueType Font, downloading to CONFIG_DIR if necessary
+ font = Path(font)
+ font = font if font.exists() else (CONFIG_DIR / font.name)
+ try:
+ return ImageFont.truetype(str(font) if font.exists() else font.name, size)
+ except Exception: # download if missing
+ try:
+ check_font(font)
+ return ImageFont.truetype(str(font), size)
+ except TypeError:
+ check_requirements('Pillow>=8.4.0') # known issue https://github.com/ultralytics/yolov5/issues/5374
+ except URLError: # not online
+ return ImageFont.load_default()
+
+
+class Annotator:
+ # YOLOv5 Annotator for train/val mosaics and jpgs and detect/hub inference annotations
+ def __init__(self, im, line_width=None, font_size=None, font='Arial.ttf', pil=False, example='abc'):
+ assert im.data.contiguous, 'Image not contiguous. Apply np.ascontiguousarray(im) to Annotator() input images.'
+ non_ascii = not is_ascii(example) # non-latin labels, i.e. asian, arabic, cyrillic
+ self.pil = pil or non_ascii
+ if self.pil: # use PIL
+ self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
+ self.draw = ImageDraw.Draw(self.im)
+ self.font = check_pil_font(font='Arial.Unicode.ttf' if non_ascii else font,
+ size=font_size or max(round(sum(self.im.size) / 2 * 0.035), 12))
+ else: # use cv2
+ self.im = im
+ self.lw = line_width or max(round(sum(im.shape) / 2 * 0.003), 2) # line width
+
+ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 255)):
+ # Add one xyxy box to image with label
+ if self.pil or not is_ascii(label):
+ self.draw.rectangle(box, width=self.lw, outline=color) # box
+ if label:
+ w, h = self.font.getsize(label) # text width, height
+ outside = box[1] - h >= 0 # label fits outside box
+ self.draw.rectangle(
+ (box[0], box[1] - h if outside else box[1], box[0] + w + 1,
+ box[1] + 1 if outside else box[1] + h + 1),
+ fill=color,
+ )
+ # self.draw.text((box[0], box[1]), label, fill=txt_color, font=self.font, anchor='ls') # for PIL>8.0
+ self.draw.text((box[0], box[1] - h if outside else box[1]), label, fill=txt_color, font=self.font)
+ else: # cv2
+ p1, p2 = (int(box[0]), int(box[1])), (int(box[2]), int(box[3]))
+ cv2.rectangle(self.im, p1, p2, color, thickness=self.lw, lineType=cv2.LINE_AA)
+ if label:
+ tf = max(self.lw - 1, 1) # font thickness
+ w, h = cv2.getTextSize(label, 0, fontScale=self.lw / 3, thickness=tf)[0] # text width, height
+ outside = p1[1] - h >= 3
+ p2 = p1[0] + w, p1[1] - h - 3 if outside else p1[1] + h + 3
+ cv2.rectangle(self.im, p1, p2, color, -1, cv2.LINE_AA) # filled
+ cv2.putText(self.im,
+ label, (p1[0], p1[1] - 2 if outside else p1[1] + h + 2),
+ 0,
+ self.lw / 3,
+ txt_color,
+ thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ def rectangle(self, xy, fill=None, outline=None, width=1):
+ # Add rectangle to image (PIL-only)
+ self.draw.rectangle(xy, fill, outline, width)
+
+ def text(self, xy, text, txt_color=(255, 255, 255), anchor='top'):
+ # Add text to image (PIL-only)
+ if anchor == 'bottom': # start y from font bottom
+ w, h = self.font.getsize(text) # text width, height
+ xy[1] += 1 - h
+ self.draw.text(xy, text, fill=txt_color, font=self.font)
+
+ def fromarray(self, im):
+ # Update self.im from a numpy array
+ self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
+ self.draw = ImageDraw.Draw(self.im)
+
+ def result(self):
+ # Return annotated image as array
+ return np.asarray(self.im)
+
+
+def feature_visualization(x, module_type, stage, n=32, save_dir=Path('runs/detect/exp')):
+ """
+ x: Features to be visualized
+ module_type: Module type
+ stage: Module stage within model
+ n: Maximum number of feature maps to plot
+ save_dir: Directory to save results
+ """
+ if 'Detect' not in module_type:
+ batch, channels, height, width = x.shape # batch, channels, height, width
+ if height > 1 and width > 1:
+ f = save_dir / f"stage{stage}_{module_type.split('.')[-1]}_features.png" # filename
+
+ blocks = torch.chunk(x[0].cpu(), channels, dim=0) # select batch index 0, block by channels
+ n = min(n, channels) # number of plots
+ fig, ax = plt.subplots(math.ceil(n / 8), 8, tight_layout=True) # 8 rows x n/8 cols
+ ax = ax.ravel()
+ plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze()) # cmap='gray'
+ ax[i].axis('off')
+
+ LOGGER.info(f'Saving {f}... ({n}/{channels})')
+ plt.title('Features')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ np.save(str(f.with_suffix('.npy')), x[0].cpu().numpy()) # npy save
+
+
+def hist2d(x, y, n=100):
+ # 2d histogram used in labels.png and evolve.png
+ xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
+ hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
+ xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
+ yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
+ return np.log(hist[xidx, yidx])
+
+
+def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
+ from scipy.signal import butter, filtfilt
+
+ # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
+ def butter_lowpass(cutoff, fs, order):
+ nyq = 0.5 * fs
+ normal_cutoff = cutoff / nyq
+ return butter(order, normal_cutoff, btype='low', analog=False)
+
+ b, a = butter_lowpass(cutoff, fs, order=order)
+ return filtfilt(b, a, data) # forward-backward filter
+
+
+def output_to_target(output, max_det=300):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf] for plotting
+ targets = []
+ for i, o in enumerate(output):
+ box, conf, cls = o[:max_det, :6].cpu().split((4, 1, 1), 1)
+ j = torch.full((conf.shape[0], 1), i)
+ targets.append(torch.cat((j, cls, xyxy2xywh(box), conf), 1))
+ return torch.cat(targets, 0).numpy()
+
+
+@threaded
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None):
+ # Plot image grid with labels
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+
+ max_size = 1920 # max image size
+ max_subplots = 16 # max image subplots, i.e. 4x4
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
+
+ # Build Image
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, im in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ im = im.transpose(1, 2, 0)
+ mosaic[y:y + h, x:x + w, :] = im
+
+ # Resize (optional)
+ scale = max_size / ns / max(h, w)
+ if scale < 1:
+ h = math.ceil(scale * h)
+ w = math.ceil(scale * w)
+ mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
+
+ # Annotate
+ fs = int((h + w) * ns * 0.01) # font size
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
+ for i in range(i + 1):
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
+ if paths:
+ annotator.text((x + 5, y + 5), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ if len(targets) > 0:
+ ti = targets[targets[:, 0] == i] # image targets
+ boxes = xywh2xyxy(ti[:, 2:6]).T
+ classes = ti[:, 1].astype('int')
+ labels = ti.shape[1] == 6 # labels if no conf column
+ conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale < 1: # absolute coords need scale if image scales
+ boxes *= scale
+ boxes[[0, 2]] += x
+ boxes[[1, 3]] += y
+ for j, box in enumerate(boxes.T.tolist()):
+ cls = classes[j]
+ color = colors(cls)
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'
+ annotator.box_label(box, label, color=color)
+ annotator.im.save(fname) # save
+
+
+def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):
+ # Plot LR simulating training for full epochs
+ optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
+ y = []
+ for _ in range(epochs):
+ scheduler.step()
+ y.append(optimizer.param_groups[0]['lr'])
+ plt.plot(y, '.-', label='LR')
+ plt.xlabel('epoch')
+ plt.ylabel('LR')
+ plt.grid()
+ plt.xlim(0, epochs)
+ plt.ylim(0)
+ plt.savefig(Path(save_dir) / 'LR.png', dpi=200)
+ plt.close()
+
+
+def plot_val_txt(): # from utils.plots import *; plot_val()
+ # Plot val.txt histograms
+ x = np.loadtxt('val.txt', dtype=np.float32)
+ box = xyxy2xywh(x[:, :4])
+ cx, cy = box[:, 0], box[:, 1]
+
+ fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
+ ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
+ ax.set_aspect('equal')
+ plt.savefig('hist2d.png', dpi=300)
+
+ fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
+ ax[0].hist(cx, bins=600)
+ ax[1].hist(cy, bins=600)
+ plt.savefig('hist1d.png', dpi=200)
+
+
+def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
+ # Plot targets.txt histograms
+ x = np.loadtxt('targets.txt', dtype=np.float32).T
+ s = ['x targets', 'y targets', 'width targets', 'height targets']
+ fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(4):
+ ax[i].hist(x[i], bins=100, label=f'{x[i].mean():.3g} +/- {x[i].std():.3g}')
+ ax[i].legend()
+ ax[i].set_title(s[i])
+ plt.savefig('targets.jpg', dpi=200)
+
+
+def plot_val_study(file='', dir='', x=None): # from utils.plots import *; plot_val_study()
+ # Plot file=study.txt generated by val.py (or plot all study*.txt in dir)
+ save_dir = Path(file).parent if file else Path(dir)
+ plot2 = False # plot additional results
+ if plot2:
+ ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)[1].ravel()
+
+ fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
+ # for f in [save_dir / f'study_coco_{x}.txt' for x in ['yolov5n6', 'yolov5s6', 'yolov5m6', 'yolov5l6', 'yolov5x6']]:
+ for f in sorted(save_dir.glob('study*.txt')):
+ y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
+ x = np.arange(y.shape[1]) if x is None else np.array(x)
+ if plot2:
+ s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_preprocess (ms/img)', 't_inference (ms/img)', 't_NMS (ms/img)']
+ for i in range(7):
+ ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)
+ ax[i].set_title(s[i])
+
+ j = y[3].argmax() + 1
+ ax2.plot(y[5, 1:j],
+ y[3, 1:j] * 1E2,
+ '.-',
+ linewidth=2,
+ markersize=8,
+ label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
+
+ ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
+ 'k.-',
+ linewidth=2,
+ markersize=8,
+ alpha=.25,
+ label='EfficientDet')
+
+ ax2.grid(alpha=0.2)
+ ax2.set_yticks(np.arange(20, 60, 5))
+ ax2.set_xlim(0, 57)
+ ax2.set_ylim(25, 55)
+ ax2.set_xlabel('GPU Speed (ms/img)')
+ ax2.set_ylabel('COCO AP val')
+ ax2.legend(loc='lower right')
+ f = save_dir / 'study.png'
+ print(f'Saving {f}...')
+ plt.savefig(f, dpi=300)
+
+
+@TryExcept() # known issue https://github.com/ultralytics/yolov5/issues/5395
+def plot_labels(labels, names=(), save_dir=Path('')):
+ # plot dataset labels
+ LOGGER.info(f"Plotting labels to {save_dir / 'labels.jpg'}... ")
+ c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
+ nc = int(c.max() + 1) # number of classes
+ x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])
+
+ # seaborn correlogram
+ sn.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
+ plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)
+ plt.close()
+
+ # matplotlib labels
+ matplotlib.use('svg') # faster
+ ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
+ y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
+ with contextlib.suppress(Exception): # color histogram bars by class
+ [y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # known issue #3195
+ ax[0].set_ylabel('instances')
+ if 0 < len(names) < 30:
+ ax[0].set_xticks(range(len(names)))
+ ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ else:
+ ax[0].set_xlabel('classes')
+ sn.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
+ sn.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)
+
+ # rectangles
+ labels[:, 1:3] = 0.5 # center
+ labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
+ img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
+ for cls, *box in labels[:1000]:
+ ImageDraw.Draw(img).rectangle(box, width=1, outline=colors(cls)) # plot
+ ax[1].imshow(img)
+ ax[1].axis('off')
+
+ for a in [0, 1, 2, 3]:
+ for s in ['top', 'right', 'left', 'bottom']:
+ ax[a].spines[s].set_visible(False)
+
+ plt.savefig(save_dir / 'labels.jpg', dpi=200)
+ matplotlib.use('Agg')
+ plt.close()
+
+
+def imshow_cls(im, labels=None, pred=None, names=None, nmax=25, verbose=False, f=Path('images.jpg')):
+ # Show classification image grid with labels (optional) and predictions (optional)
+ from utils.augmentations import denormalize
+
+ names = names or [f'class{i}' for i in range(1000)]
+ blocks = torch.chunk(denormalize(im.clone()).cpu().float(), len(im),
+ dim=0) # select batch index 0, block by channels
+ n = min(len(blocks), nmax) # number of plots
+ m = min(8, round(n ** 0.5)) # 8 x 8 default
+ fig, ax = plt.subplots(math.ceil(n / m), m) # 8 rows x n/8 cols
+ ax = ax.ravel() if m > 1 else [ax]
+ # plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze().permute((1, 2, 0)).numpy().clip(0.0, 1.0))
+ ax[i].axis('off')
+ if labels is not None:
+ s = names[labels[i]] + (f'—{names[pred[i]]}' if pred is not None else '')
+ ax[i].set_title(s, fontsize=8, verticalalignment='top')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ if verbose:
+ LOGGER.info(f"Saving {f}")
+ if labels is not None:
+ LOGGER.info('True: ' + ' '.join(f'{names[i]:3s}' for i in labels[:nmax]))
+ if pred is not None:
+ LOGGER.info('Predicted:' + ' '.join(f'{names[i]:3s}' for i in pred[:nmax]))
+ return f
+
+
+def plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *; plot_evolve()
+ # Plot evolve.csv hyp evolution results
+ evolve_csv = Path(evolve_csv)
+ data = pd.read_csv(evolve_csv)
+ keys = [x.strip() for x in data.columns]
+ x = data.values
+ f = fitness(x)
+ j = np.argmax(f) # max fitness index
+ plt.figure(figsize=(10, 12), tight_layout=True)
+ matplotlib.rc('font', **{'size': 8})
+ print(f'Best results from row {j} of {evolve_csv}:')
+ for i, k in enumerate(keys[7:]):
+ v = x[:, 7 + i]
+ mu = v[j] # best single result
+ plt.subplot(6, 5, i + 1)
+ plt.scatter(v, f, c=hist2d(v, f, 20), cmap='viridis', alpha=.8, edgecolors='none')
+ plt.plot(mu, f.max(), 'k+', markersize=15)
+ plt.title(f'{k} = {mu:.3g}', fontdict={'size': 9}) # limit to 40 characters
+ if i % 5 != 0:
+ plt.yticks([])
+ print(f'{k:>15}: {mu:.3g}')
+ f = evolve_csv.with_suffix('.png') # filename
+ plt.savefig(f, dpi=200)
+ plt.close()
+ print(f'Saved {f}')
+
+
+def plot_results(file='path/to/results.csv', dir=''):
+ # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')
+ save_dir = Path(file).parent if file else Path(dir)
+ fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
+ ax = ax.ravel()
+ files = list(save_dir.glob('results*.csv'))
+ assert len(files), f'No results.csv files found in {save_dir.resolve()}, nothing to plot.'
+ for f in files:
+ try:
+ data = pd.read_csv(f)
+ s = [x.strip() for x in data.columns]
+ x = data.values[:, 0]
+ for i, j in enumerate([1, 2, 3, 4, 5, 8, 9, 10, 6, 7]):
+ y = data.values[:, j].astype('float')
+ # y[y == 0] = np.nan # don't show zero values
+ ax[i].plot(x, y, marker='.', label=f.stem, linewidth=2, markersize=8)
+ ax[i].set_title(s[j], fontsize=12)
+ # if j in [8, 9, 10]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ LOGGER.info(f'Warning: Plotting error for {f}: {e}')
+ ax[1].legend()
+ fig.savefig(save_dir / 'results.png', dpi=200)
+ plt.close()
+
+
+def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
+ # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()
+ ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
+ s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']
+ files = list(Path(save_dir).glob('frames*.txt'))
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
+ n = results.shape[1] # number of rows
+ x = np.arange(start, min(stop, n) if stop else n)
+ results = results[:, x]
+ t = (results[0] - results[0].min()) # set t0=0s
+ results[0] = x
+ for i, a in enumerate(ax):
+ if i < len(results):
+ label = labels[fi] if len(labels) else f.stem.replace('frames_', '')
+ a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)
+ a.set_title(s[i])
+ a.set_xlabel('time (s)')
+ # if fi == len(files) - 1:
+ # a.set_ylim(bottom=0)
+ for side in ['top', 'right']:
+ a.spines[side].set_visible(False)
+ else:
+ a.remove()
+ except Exception as e:
+ print(f'Warning: Plotting error for {f}; {e}')
+ ax[1].legend()
+ plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
+
+
+def save_one_box(xyxy, im, file=Path('im.jpg'), gain=1.02, pad=10, square=False, BGR=False, save=True):
+ # Save image crop as {file} with crop size multiple {gain} and {pad} pixels. Save and/or return crop
+ xyxy = torch.tensor(xyxy).view(-1, 4)
+ b = xyxy2xywh(xyxy) # boxes
+ if square:
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # attempt rectangle to square
+ b[:, 2:] = b[:, 2:] * gain + pad # box wh * gain + pad
+ xyxy = xywh2xyxy(b).long()
+ clip_coords(xyxy, im.shape)
+ crop = im[int(xyxy[0, 1]):int(xyxy[0, 3]), int(xyxy[0, 0]):int(xyxy[0, 2]), ::(1 if BGR else -1)]
+ if save:
+ file.parent.mkdir(parents=True, exist_ok=True) # make directory
+ f = str(increment_path(file).with_suffix('.jpg'))
+ # cv2.imwrite(f, crop) # save BGR, https://github.com/ultralytics/yolov5/issues/7007 chroma subsampling issue
+ Image.fromarray(crop[..., ::-1]).save(f, quality=95, subsampling=0) # save RGB
+ return crop
diff --git a/ipex/seg/utils/segment/__init__.py b/ipex/seg/utils/segment/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/ipex/seg/utils/segment/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/ipex/seg/utils/segment/augmentations.py b/ipex/seg/utils/segment/augmentations.py
new file mode 100644
index 000000000..169addedf
--- /dev/null
+++ b/ipex/seg/utils/segment/augmentations.py
@@ -0,0 +1,104 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Image augmentation functions
+"""
+
+import math
+import random
+
+import cv2
+import numpy as np
+
+from ..augmentations import box_candidates
+from ..general import resample_segments, segment2box
+
+
+def mixup(im, labels, segments, im2, labels2, segments2):
+ # Applies MixUp augmentation https://arxiv.org/pdf/1710.09412.pdf
+ r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
+ im = (im * r + im2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+ segments = np.concatenate((segments, segments2), 0)
+ return im, labels, segments
+
+
+def random_perspective(im,
+ targets=(),
+ segments=(),
+ degrees=10,
+ translate=.1,
+ scale=.1,
+ shear=10,
+ perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = im.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = im.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = (random.uniform(0.5 - translate, 0.5 + translate) * width) # x translation (pixels)
+ T[1, 2] = (random.uniform(0.5 - translate, 0.5 + translate) * height) # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(im[:, :, ::-1]) # base
+ # ax[1].imshow(im2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ new_segments = []
+ if n:
+ new = np.zeros((n, 4))
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]) # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+ new_segments.append(xy)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+ new_segments = np.array(new_segments)[i]
+
+ return im, targets, new_segments
diff --git a/ipex/seg/utils/segment/dataloaders.py b/ipex/seg/utils/segment/dataloaders.py
new file mode 100644
index 000000000..7bdb668ce
--- /dev/null
+++ b/ipex/seg/utils/segment/dataloaders.py
@@ -0,0 +1,331 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Dataloaders
+"""
+
+import os
+import random
+
+import cv2
+import numpy as np
+import torch
+from torch.utils.data import DataLoader, distributed
+
+from ..augmentations import augment_hsv, copy_paste, letterbox
+from ..dataloaders import InfiniteDataLoader, LoadImagesAndLabels, seed_worker
+from ..general import LOGGER, xyn2xy, xywhn2xyxy, xyxy2xywhn
+from ..torch_utils import torch_distributed_zero_first
+from .augmentations import mixup, random_perspective
+
+
+def create_dataloader(path,
+ imgsz,
+ batch_size,
+ stride,
+ single_cls=False,
+ hyp=None,
+ augment=False,
+ cache=False,
+ pad=0.0,
+ rect=False,
+ rank=-1,
+ workers=8,
+ image_weights=False,
+ quad=False,
+ prefix='',
+ shuffle=False,
+ mask_downsample_ratio=1,
+ overlap_mask=False):
+ if rect and shuffle:
+ LOGGER.warning('WARNING: --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ shuffle = False
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = LoadImagesAndLabelsAndMasks(
+ path,
+ imgsz,
+ batch_size,
+ augment=augment, # augmentation
+ hyp=hyp, # hyperparameters
+ rect=rect, # rectangular batches
+ cache_images=cache,
+ single_cls=single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix,
+ downsample_ratio=mask_downsample_ratio,
+ overlap=overlap_mask)
+
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count() # number of CUDA devices
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
+ # generator = torch.Generator()
+ # generator.manual_seed(0)
+ return loader(
+ dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabelsAndMasks.collate_fn4 if quad else LoadImagesAndLabelsAndMasks.collate_fn,
+ worker_init_fn=seed_worker,
+ # generator=generator,
+ ), dataset
+
+
+class LoadImagesAndLabelsAndMasks(LoadImagesAndLabels): # for training/testing
+
+ def __init__(
+ self,
+ path,
+ img_size=640,
+ batch_size=16,
+ augment=False,
+ hyp=None,
+ rect=False,
+ image_weights=False,
+ cache_images=False,
+ single_cls=False,
+ stride=32,
+ pad=0,
+ prefix="",
+ downsample_ratio=1,
+ overlap=False,
+ ):
+ super().__init__(path, img_size, batch_size, augment, hyp, rect, image_weights, cache_images, single_cls,
+ stride, pad, prefix)
+ self.downsample_ratio = downsample_ratio
+ self.overlap = overlap
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ masks = []
+ if mosaic:
+ # Load mosaic
+ img, labels, segments = self.load_mosaic(index)
+ shapes = None
+
+ # MixUp augmentation
+ if random.random() < hyp["mixup"]:
+ img, labels, segments = mixup(img, labels, segments, *self.load_mosaic(random.randint(0, self.n - 1)))
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = self.load_image(index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ # [array, array, ....], array.shape=(num_points, 2), xyxyxyxy
+ segments = self.segments[index].copy()
+ if len(segments):
+ for i_s in range(len(segments)):
+ segments[i_s] = xyn2xy(
+ segments[i_s],
+ ratio[0] * w,
+ ratio[1] * h,
+ padw=pad[0],
+ padh=pad[1],
+ )
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ img, labels, segments = random_perspective(
+ img,
+ labels,
+ segments=segments,
+ degrees=hyp["degrees"],
+ translate=hyp["translate"],
+ scale=hyp["scale"],
+ shear=hyp["shear"],
+ perspective=hyp["perspective"],
+ return_seg=True,
+ )
+
+ nl = len(labels) # number of labels
+ if nl:
+ labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1e-3)
+ if self.overlap:
+ masks, sorted_idx = polygons2masks_overlap(img.shape[:2],
+ segments,
+ downsample_ratio=self.downsample_ratio)
+ masks = masks[None] # (640, 640) -> (1, 640, 640)
+ labels = labels[sorted_idx]
+ else:
+ masks = polygons2masks(img.shape[:2], segments, color=1, downsample_ratio=self.downsample_ratio)
+
+ masks = (torch.from_numpy(masks) if len(masks) else torch.zeros(1 if self.overlap else nl, img.shape[0] //
+ self.downsample_ratio, img.shape[1] //
+ self.downsample_ratio))
+ # TODO: albumentations support
+ if self.augment:
+ # Albumentations
+ # there are some augmentation that won't change boxes and masks,
+ # so just be it for now.
+ img, labels = self.albumentations(img, labels)
+ nl = len(labels) # update after albumentations
+
+ # HSV color-space
+ augment_hsv(img, hgain=hyp["hsv_h"], sgain=hyp["hsv_s"], vgain=hyp["hsv_v"])
+
+ # Flip up-down
+ if random.random() < hyp["flipud"]:
+ img = np.flipud(img)
+ if nl:
+ labels[:, 2] = 1 - labels[:, 2]
+ masks = torch.flip(masks, dims=[1])
+
+ # Flip left-right
+ if random.random() < hyp["fliplr"]:
+ img = np.fliplr(img)
+ if nl:
+ labels[:, 1] = 1 - labels[:, 1]
+ masks = torch.flip(masks, dims=[2])
+
+ # Cutouts # labels = cutout(img, labels, p=0.5)
+
+ labels_out = torch.zeros((nl, 6))
+ if nl:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return (torch.from_numpy(img), labels_out, self.im_files[index], shapes, masks)
+
+ def load_mosaic(self, index):
+ # YOLOv5 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
+
+ # 3 additional image indices
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp["copy_paste"])
+ img4, labels4, segments4 = random_perspective(img4,
+ labels4,
+ segments4,
+ degrees=self.hyp["degrees"],
+ translate=self.hyp["translate"],
+ scale=self.hyp["scale"],
+ shear=self.hyp["shear"],
+ perspective=self.hyp["perspective"],
+ border=self.mosaic_border) # border to remove
+ return img4, labels4, segments4
+
+ @staticmethod
+ def collate_fn(batch):
+ img, label, path, shapes, masks = zip(*batch) # transposed
+ batched_masks = torch.cat(masks, 0)
+ for i, l in enumerate(label):
+ l[:, 0] = i # add target image index for build_targets()
+ return torch.stack(img, 0), torch.cat(label, 0), path, shapes, batched_masks
+
+
+def polygon2mask(img_size, polygons, color=1, downsample_ratio=1):
+ """
+ Args:
+ img_size (tuple): The image size.
+ polygons (np.ndarray): [N, M], N is the number of polygons,
+ M is the number of points(Be divided by 2).
+ """
+ mask = np.zeros(img_size, dtype=np.uint8)
+ polygons = np.asarray(polygons)
+ polygons = polygons.astype(np.int32)
+ shape = polygons.shape
+ polygons = polygons.reshape(shape[0], -1, 2)
+ cv2.fillPoly(mask, polygons, color=color)
+ nh, nw = (img_size[0] // downsample_ratio, img_size[1] // downsample_ratio)
+ # NOTE: fillPoly firstly then resize is trying the keep the same way
+ # of loss calculation when mask-ratio=1.
+ mask = cv2.resize(mask, (nw, nh))
+ return mask
+
+
+def polygons2masks(img_size, polygons, color, downsample_ratio=1):
+ """
+ Args:
+ img_size (tuple): The image size.
+ polygons (list[np.ndarray]): each polygon is [N, M],
+ N is the number of polygons,
+ M is the number of points(Be divided by 2).
+ """
+ masks = []
+ for si in range(len(polygons)):
+ mask = polygon2mask(img_size, [polygons[si].reshape(-1)], color, downsample_ratio)
+ masks.append(mask)
+ return np.array(masks)
+
+
+def polygons2masks_overlap(img_size, segments, downsample_ratio=1):
+ """Return a (640, 640) overlap mask."""
+ masks = np.zeros((img_size[0] // downsample_ratio, img_size[1] // downsample_ratio),
+ dtype=np.int32 if len(segments) > 255 else np.uint8)
+ areas = []
+ ms = []
+ for si in range(len(segments)):
+ mask = polygon2mask(
+ img_size,
+ [segments[si].reshape(-1)],
+ downsample_ratio=downsample_ratio,
+ color=1,
+ )
+ ms.append(mask)
+ areas.append(mask.sum())
+ areas = np.asarray(areas)
+ index = np.argsort(-areas)
+ ms = np.array(ms)[index]
+ for i in range(len(segments)):
+ mask = ms[i] * (i + 1)
+ masks = masks + mask
+ masks = np.clip(masks, a_min=0, a_max=i + 1)
+ return masks, index
diff --git a/ipex/seg/utils/segment/general.py b/ipex/seg/utils/segment/general.py
new file mode 100644
index 000000000..2c62e99b1
--- /dev/null
+++ b/ipex/seg/utils/segment/general.py
@@ -0,0 +1,128 @@
+import cv2
+import torch
+import torch.nn.functional as F
+
+
+def crop(masks, boxes):
+ """
+ "Crop" predicted masks by zeroing out everything not in the predicted bbox.
+ Vectorized by Chong (thanks Chong).
+
+ Args:
+ - masks should be a size [h, w, n] tensor of masks
+ - boxes should be a size [n, 4] tensor of bbox coords in relative point form
+ """
+
+ n, h, w = masks.shape
+ x1, y1, x2, y2 = torch.chunk(boxes[:, :, None], 4, 1) # x1 shape(1,1,n)
+ r = torch.arange(w, device=masks.device, dtype=x1.dtype)[None, None, :] # rows shape(1,w,1)
+ c = torch.arange(h, device=masks.device, dtype=x1.dtype)[None, :, None] # cols shape(h,1,1)
+
+ return masks * ((r >= x1) * (r < x2) * (c >= y1) * (c < y2))
+
+
+def process_mask_upsample(protos, masks_in, bboxes, shape):
+ """
+ Crop after upsample.
+ proto_out: [mask_dim, mask_h, mask_w]
+ out_masks: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape:input_image_size, (h, w)
+
+ return: h, w, n
+ """
+
+ c, mh, mw = protos.shape # CHW
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ masks = crop(masks, bboxes) # CHW
+ return masks.gt_(0.5)
+
+
+def process_mask(protos, masks_in, bboxes, shape, upsample=False):
+ """
+ Crop before upsample.
+ proto_out: [mask_dim, mask_h, mask_w]
+ out_masks: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape:input_image_size, (h, w)
+
+ return: h, w, n
+ """
+
+ c, mh, mw = protos.shape # CHW
+ ih, iw = shape
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw) # CHW
+
+ downsampled_bboxes = bboxes.clone()
+ downsampled_bboxes[:, 0] *= mw / iw
+ downsampled_bboxes[:, 2] *= mw / iw
+ downsampled_bboxes[:, 3] *= mh / ih
+ downsampled_bboxes[:, 1] *= mh / ih
+
+ masks = crop(masks, downsampled_bboxes) # CHW
+ if upsample:
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ return masks.gt_(0.5)
+
+
+def scale_masks(img1_shape, masks, img0_shape, ratio_pad=None):
+ """
+ img1_shape: model input shape, [h, w]
+ img0_shape: origin pic shape, [h, w, 3]
+ masks: [h, w, num]
+ resize for the most time
+ """
+ # Rescale coords (xyxy) from img1_shape to img0_shape
+ if ratio_pad is None: # calculate from img0_shape
+ gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
+ pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
+ else:
+ gain = ratio_pad[0][0]
+ pad = ratio_pad[1]
+ tl_pad = int(pad[1]), int(pad[0]) # y, x
+ br_pad = int(img1_shape[0] - pad[1]), int(img1_shape[1] - pad[0])
+
+ if len(masks.shape) < 2:
+ raise ValueError(f'"len of masks shape" should be 2 or 3, but got {len(masks.shape)}')
+ # masks_h, masks_w, n
+ masks = masks[tl_pad[0]:br_pad[0], tl_pad[1]:br_pad[1]]
+ # 1, n, masks_h, masks_w
+ # masks = masks.permute(2, 0, 1).contiguous()[None, :]
+ # # shape = [1, n, masks_h, masks_w] after F.interpolate, so take first element
+ # masks = F.interpolate(masks, img0_shape[:2], mode='bilinear', align_corners=False)[0]
+ # masks = masks.permute(1, 2, 0).contiguous()
+ # masks_h, masks_w, n
+ masks = cv2.resize(masks, (img0_shape[1], img0_shape[0]))
+
+ # keepdim
+ if len(masks.shape) == 2:
+ masks = masks[:, :, None]
+
+ return masks
+
+
+def mask_iou(mask1, mask2, eps=1e-7):
+ """
+ mask1: [N, n] m1 means number of predicted objects
+ mask2: [M, n] m2 means number of gt objects
+ Note: n means image_w x image_h
+
+ return: masks iou, [N, M]
+ """
+ intersection = torch.matmul(mask1, mask2.t()).clamp(0)
+ union = (mask1.sum(1)[:, None] + mask2.sum(1)[None]) - intersection # (area1 + area2) - intersection
+ return intersection / (union + eps)
+
+
+def masks_iou(mask1, mask2, eps=1e-7):
+ """
+ mask1: [N, n] m1 means number of predicted objects
+ mask2: [N, n] m2 means number of gt objects
+ Note: n means image_w x image_h
+
+ return: masks iou, (N, )
+ """
+ intersection = (mask1 * mask2).sum(1).clamp(0) # (N, )
+ union = (mask1.sum(1) + mask2.sum(1))[None] - intersection # (area1 + area2) - intersection
+ return intersection / (union + eps)
diff --git a/ipex/seg/utils/segment/loss.py b/ipex/seg/utils/segment/loss.py
new file mode 100644
index 000000000..fa1043488
--- /dev/null
+++ b/ipex/seg/utils/segment/loss.py
@@ -0,0 +1,186 @@
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+from ..general import xywh2xyxy
+from ..loss import FocalLoss, smooth_BCE
+from ..metrics import bbox_iou
+from ..torch_utils import de_parallel
+from .general import crop
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False, overlap=False):
+ self.sort_obj_iou = False
+ self.overlap = overlap
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+ self.device = device
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ m = de_parallel(model).model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
+ self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
+ self.na = m.na # number of anchors
+ self.nc = m.nc # number of classes
+ self.nl = m.nl # number of layers
+ self.nm = m.nm # number of masks
+ self.anchors = m.anchors
+ self.device = device
+
+ def __call__(self, preds, targets, masks): # predictions, targets, model
+ p, proto = preds
+ bs, nm, mask_h, mask_w = proto.shape # batch size, number of masks, mask height, mask width
+ lcls = torch.zeros(1, device=self.device)
+ lbox = torch.zeros(1, device=self.device)
+ lobj = torch.zeros(1, device=self.device)
+ lseg = torch.zeros(1, device=self.device)
+ tcls, tbox, indices, anchors, tidxs, xywhn = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ pxy, pwh, _, pcls, pmask = pi[b, a, gj, gi].split((2, 2, 1, self.nc, nm), 1) # subset of predictions
+
+ # Box regression
+ pxy = pxy.sigmoid() * 2 - 0.5
+ pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ iou = iou.detach().clamp(0).type(tobj.dtype)
+ if self.sort_obj_iou:
+ j = iou.argsort()
+ b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
+ if self.gr < 1:
+ iou = (1.0 - self.gr) + self.gr * iou
+ tobj[b, a, gj, gi] = iou # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(pcls, self.cn, device=self.device) # targets
+ t[range(n), tcls[i]] = self.cp
+ lcls += self.BCEcls(pcls, t) # BCE
+
+ # Mask regression
+ if tuple(masks.shape[-2:]) != (mask_h, mask_w): # downsample
+ masks = F.interpolate(masks[None], (mask_h, mask_w), mode="bilinear", align_corners=False)[0]
+ marea = xywhn[i][:, 2:].prod(1) # mask width, height normalized
+ mxyxy = xywh2xyxy(xywhn[i] * torch.tensor([mask_w, mask_h, mask_w, mask_h], device=self.device))
+ for bi in b.unique():
+ j = b == bi # matching index
+ if self.overlap:
+ mask_gti = torch.where(masks[bi][None] == tidxs[i][j].view(-1, 1, 1), 1.0, 0.0)
+ else:
+ mask_gti = masks[tidxs[i]][j]
+ lseg += self.single_mask_loss(mask_gti, pmask[j], proto[bi], mxyxy[j], marea[j])
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp["box"]
+ lobj *= self.hyp["obj"]
+ lcls *= self.hyp["cls"]
+ lseg *= self.hyp["box"] / bs
+
+ loss = lbox + lobj + lcls + lseg
+ return loss * bs, torch.cat((lbox, lseg, lobj, lcls)).detach()
+
+ def single_mask_loss(self, gt_mask, pred, proto, xyxy, area):
+ # Mask loss for one image
+ pred_mask = (pred @ proto.view(self.nm, -1)).view(-1, *proto.shape[1:]) # (n,32) @ (32,80,80) -> (n,80,80)
+ loss = F.binary_cross_entropy_with_logits(pred_mask, gt_mask, reduction="none")
+ return (crop(loss, xyxy).mean(dim=(1, 2)) / area).mean()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch, tidxs, xywhn = [], [], [], [], [], []
+ gain = torch.ones(8, device=self.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ if self.overlap:
+ batch = p[0].shape[0]
+ ti = []
+ for i in range(batch):
+ num = (targets[:, 0] == i).sum() # find number of targets of each image
+ ti.append(torch.arange(num, device=self.device).float().view(1, num).repeat(na, 1) + 1) # (na, num)
+ ti = torch.cat(ti, 1) # (na, nt)
+ else:
+ ti = torch.arange(nt, device=self.device).float().view(1, nt).repeat(na, 1)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None], ti[..., None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor(
+ [
+ [0, 0],
+ [1, 0],
+ [0, 1],
+ [-1, 0],
+ [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ],
+ device=self.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors, shape = self.anchors[i], p[i].shape
+ gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain # shape(3,n,7)
+ if nt:
+ # Matches
+ r = t[..., 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1 < g) & (gxy > 1)).T
+ l, m = ((gxi % 1 < g) & (gxi > 1)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ bc, gxy, gwh, at = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
+ (a, tidx), (b, c) = at.long().T, bc.long().T # anchors, image, class
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid indices
+
+ # Append
+ indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+ tidxs.append(tidx)
+ xywhn.append(torch.cat((gxy, gwh), 1) / gain[2:6]) # xywh normalized
+
+ return tcls, tbox, indices, anch, tidxs, xywhn
diff --git a/ipex/seg/utils/segment/metrics.py b/ipex/seg/utils/segment/metrics.py
new file mode 100644
index 000000000..b09ce23fb
--- /dev/null
+++ b/ipex/seg/utils/segment/metrics.py
@@ -0,0 +1,210 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Model validation metrics
+"""
+
+import numpy as np
+
+from ..metrics import ap_per_class
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9, 0.0, 0.0, 0.1, 0.9]
+ return (x[:, :8] * w).sum(1)
+
+
+def ap_per_class_box_and_mask(
+ tp_m,
+ tp_b,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=False,
+ save_dir=".",
+ names=(),
+):
+ """
+ Args:
+ tp_b: tp of boxes.
+ tp_m: tp of masks.
+ other arguments see `func: ap_per_class`.
+ """
+ results_boxes = ap_per_class(tp_b,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=plot,
+ save_dir=save_dir,
+ names=names,
+ prefix="Box")[2:]
+ results_masks = ap_per_class(tp_m,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=plot,
+ save_dir=save_dir,
+ names=names,
+ prefix="Mask")[2:]
+
+ results = {
+ "boxes": {
+ "p": results_boxes[0],
+ "r": results_boxes[1],
+ "ap": results_boxes[3],
+ "f1": results_boxes[2],
+ "ap_class": results_boxes[4]},
+ "masks": {
+ "p": results_masks[0],
+ "r": results_masks[1],
+ "ap": results_masks[3],
+ "f1": results_masks[2],
+ "ap_class": results_masks[4]}}
+ return results
+
+
+class Metric:
+
+ def __init__(self) -> None:
+ self.p = [] # (nc, )
+ self.r = [] # (nc, )
+ self.f1 = [] # (nc, )
+ self.all_ap = [] # (nc, 10)
+ self.ap_class_index = [] # (nc, )
+
+ @property
+ def ap50(self):
+ """AP@0.5 of all classes.
+ Return:
+ (nc, ) or [].
+ """
+ return self.all_ap[:, 0] if len(self.all_ap) else []
+
+ @property
+ def ap(self):
+ """AP@0.5:0.95
+ Return:
+ (nc, ) or [].
+ """
+ return self.all_ap.mean(1) if len(self.all_ap) else []
+
+ @property
+ def mp(self):
+ """mean precision of all classes.
+ Return:
+ float.
+ """
+ return self.p.mean() if len(self.p) else 0.0
+
+ @property
+ def mr(self):
+ """mean recall of all classes.
+ Return:
+ float.
+ """
+ return self.r.mean() if len(self.r) else 0.0
+
+ @property
+ def map50(self):
+ """Mean AP@0.5 of all classes.
+ Return:
+ float.
+ """
+ return self.all_ap[:, 0].mean() if len(self.all_ap) else 0.0
+
+ @property
+ def map(self):
+ """Mean AP@0.5:0.95 of all classes.
+ Return:
+ float.
+ """
+ return self.all_ap.mean() if len(self.all_ap) else 0.0
+
+ def mean_results(self):
+ """Mean of results, return mp, mr, map50, map"""
+ return (self.mp, self.mr, self.map50, self.map)
+
+ def class_result(self, i):
+ """class-aware result, return p[i], r[i], ap50[i], ap[i]"""
+ return (self.p[i], self.r[i], self.ap50[i], self.ap[i])
+
+ def get_maps(self, nc):
+ maps = np.zeros(nc) + self.map
+ for i, c in enumerate(self.ap_class_index):
+ maps[c] = self.ap[i]
+ return maps
+
+ def update(self, results):
+ """
+ Args:
+ results: tuple(p, r, ap, f1, ap_class)
+ """
+ p, r, all_ap, f1, ap_class_index = results
+ self.p = p
+ self.r = r
+ self.all_ap = all_ap
+ self.f1 = f1
+ self.ap_class_index = ap_class_index
+
+
+class Metrics:
+ """Metric for boxes and masks."""
+
+ def __init__(self) -> None:
+ self.metric_box = Metric()
+ self.metric_mask = Metric()
+
+ def update(self, results):
+ """
+ Args:
+ results: Dict{'boxes': Dict{}, 'masks': Dict{}}
+ """
+ self.metric_box.update(list(results["boxes"].values()))
+ self.metric_mask.update(list(results["masks"].values()))
+
+ def mean_results(self):
+ return self.metric_box.mean_results() + self.metric_mask.mean_results()
+
+ def class_result(self, i):
+ return self.metric_box.class_result(i) + self.metric_mask.class_result(i)
+
+ def get_maps(self, nc):
+ return self.metric_box.get_maps(nc) + self.metric_mask.get_maps(nc)
+
+ @property
+ def ap_class_index(self):
+ # boxes and masks have the same ap_class_index
+ return self.metric_box.ap_class_index
+
+
+KEYS = [
+ "train/box_loss",
+ "train/seg_loss", # train loss
+ "train/obj_loss",
+ "train/cls_loss",
+ "metrics/precision(B)",
+ "metrics/recall(B)",
+ "metrics/mAP_0.5(B)",
+ "metrics/mAP_0.5:0.95(B)", # metrics
+ "metrics/precision(M)",
+ "metrics/recall(M)",
+ "metrics/mAP_0.5(M)",
+ "metrics/mAP_0.5:0.95(M)", # metrics
+ "val/box_loss",
+ "val/seg_loss", # val loss
+ "val/obj_loss",
+ "val/cls_loss",
+ "x/lr0",
+ "x/lr1",
+ "x/lr2",]
+
+BEST_KEYS = [
+ "best/epoch",
+ "best/precision(B)",
+ "best/recall(B)",
+ "best/mAP_0.5(B)",
+ "best/mAP_0.5:0.95(B)",
+ "best/precision(M)",
+ "best/recall(M)",
+ "best/mAP_0.5(M)",
+ "best/mAP_0.5:0.95(M)",]
diff --git a/ipex/seg/utils/segment/plots.py b/ipex/seg/utils/segment/plots.py
new file mode 100644
index 000000000..eac46d985
--- /dev/null
+++ b/ipex/seg/utils/segment/plots.py
@@ -0,0 +1,182 @@
+import contextlib
+import math
+from pathlib import Path
+
+import cv2
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import torch
+
+from .. import threaded
+from ..general import xywh2xyxy
+from ..plots import Annotator, colors
+
+
+def plot_masks(img, masks, colors, alpha=0.5):
+ """
+ Args:
+ img (tensor): img is in cuda, shape: [3, h, w], range: [0, 1]
+ masks (tensor): predicted masks on cuda, shape: [n, h, w]
+ colors (List[List[Int]]): colors for predicted masks, [[r, g, b] * n]
+ Return:
+ ndarray: img after draw masks, shape: [h, w, 3]
+
+ transform colors and send img_gpu to cpu for the most time.
+ """
+ img_gpu = img.clone()
+ num_masks = len(masks)
+ if num_masks == 0:
+ return img.permute(1, 2, 0).contiguous().cpu().numpy() * 255
+
+ # [n, 1, 1, 3]
+ # faster this way to transform colors
+ colors = torch.tensor(colors, device=img.device).float() / 255.0
+ colors = colors[:, None, None, :]
+ # [n, h, w, 1]
+ masks = masks[:, :, :, None]
+ masks_color = masks.repeat(1, 1, 1, 3) * colors * alpha
+ inv_alph_masks = masks * (-alpha) + 1
+ masks_color_summand = masks_color[0]
+ if num_masks > 1:
+ inv_alph_cumul = inv_alph_masks[:(num_masks - 1)].cumprod(dim=0)
+ masks_color_cumul = masks_color[1:] * inv_alph_cumul
+ masks_color_summand += masks_color_cumul.sum(dim=0)
+
+ # print(inv_alph_masks.prod(dim=0).shape) # [h, w, 1]
+ img_gpu = img_gpu.flip(dims=[0]) # filp channel for opencv
+ img_gpu = img_gpu.permute(1, 2, 0).contiguous()
+ # [h, w, 3]
+ img_gpu = img_gpu * inv_alph_masks.prod(dim=0) + masks_color_summand
+ return (img_gpu * 255).byte().cpu().numpy()
+
+
+@threaded
+def plot_images_and_masks(images, targets, masks, paths=None, fname='images.jpg', names=None):
+ # Plot image grid with labels
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+ if isinstance(masks, torch.Tensor):
+ masks = masks.cpu().numpy().astype(int)
+
+ max_size = 1920 # max image size
+ max_subplots = 16 # max image subplots, i.e. 4x4
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
+
+ # Build Image
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, im in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ im = im.transpose(1, 2, 0)
+ mosaic[y:y + h, x:x + w, :] = im
+
+ # Resize (optional)
+ scale = max_size / ns / max(h, w)
+ if scale < 1:
+ h = math.ceil(scale * h)
+ w = math.ceil(scale * w)
+ mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
+
+ # Annotate
+ fs = int((h + w) * ns * 0.01) # font size
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
+ for i in range(i + 1):
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
+ if paths:
+ annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ if len(targets) > 0:
+ idx = targets[:, 0] == i
+ ti = targets[idx] # image targets
+
+ boxes = xywh2xyxy(ti[:, 2:6]).T
+ classes = ti[:, 1].astype('int')
+ labels = ti.shape[1] == 6 # labels if no conf column
+ conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale < 1: # absolute coords need scale if image scales
+ boxes *= scale
+ boxes[[0, 2]] += x
+ boxes[[1, 3]] += y
+ for j, box in enumerate(boxes.T.tolist()):
+ cls = classes[j]
+ color = colors(cls)
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'
+ annotator.box_label(box, label, color=color)
+
+ # Plot masks
+ if len(masks):
+ if masks.max() > 1.0: # mean that masks are overlap
+ image_masks = masks[[i]] # (1, 640, 640)
+ nl = len(ti)
+ index = np.arange(nl).reshape(nl, 1, 1) + 1
+ image_masks = np.repeat(image_masks, nl, axis=0)
+ image_masks = np.where(image_masks == index, 1.0, 0.0)
+ else:
+ image_masks = masks[idx]
+
+ im = np.asarray(annotator.im).copy()
+ for j, box in enumerate(boxes.T.tolist()):
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ color = colors(classes[j])
+ mh, mw = image_masks[j].shape
+ if mh != h or mw != w:
+ mask = image_masks[j].astype(np.uint8)
+ mask = cv2.resize(mask, (w, h))
+ mask = mask.astype(np.bool)
+ else:
+ mask = image_masks[j].astype(np.bool)
+ with contextlib.suppress(Exception):
+ im[y:y + h, x:x + w, :][mask] = im[y:y + h, x:x + w, :][mask] * 0.4 + np.array(color) * 0.6
+ annotator.fromarray(im)
+ annotator.im.save(fname) # save
+
+
+def plot_results_with_masks(file="path/to/results.csv", dir="", best=True):
+ # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')
+ save_dir = Path(file).parent if file else Path(dir)
+ fig, ax = plt.subplots(2, 8, figsize=(18, 6), tight_layout=True)
+ ax = ax.ravel()
+ files = list(save_dir.glob("results*.csv"))
+ assert len(files), f"No results.csv files found in {save_dir.resolve()}, nothing to plot."
+ for f in files:
+ try:
+ data = pd.read_csv(f)
+ index = np.argmax(
+ 0.9 * data.values[:, 8] + 0.1 * data.values[:, 7] + 0.9 * data.values[:, 12] +
+ 0.1 * data.values[:, 11],)
+ s = [x.strip() for x in data.columns]
+ x = data.values[:, 0]
+ for i, j in enumerate([1, 2, 3, 4, 5, 6, 9, 10, 13, 14, 15, 16, 7, 8, 11, 12]):
+ y = data.values[:, j]
+ # y[y == 0] = np.nan # don't show zero values
+ ax[i].plot(x, y, marker=".", label=f.stem, linewidth=2, markersize=2)
+ if best:
+ # best
+ ax[i].scatter(index, y[index], color="r", label=f"best:{index}", marker="*", linewidth=3)
+ ax[i].set_title(s[j] + f"\n{round(y[index], 5)}")
+ else:
+ # last
+ ax[i].scatter(x[-1], y[-1], color="r", label="last", marker="*", linewidth=3)
+ ax[i].set_title(s[j] + f"\n{round(y[-1], 5)}")
+ # if j in [8, 9, 10]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print(f"Warning: Plotting error for {f}: {e}")
+ ax[1].legend()
+ fig.savefig(save_dir / "results.png", dpi=200)
+ plt.close()
diff --git a/ipex/seg/utils/torch_utils.py b/ipex/seg/utils/torch_utils.py
new file mode 100644
index 000000000..d31c9bfef
--- /dev/null
+++ b/ipex/seg/utils/torch_utils.py
@@ -0,0 +1,441 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+PyTorch utils
+"""
+
+import math
+import os
+import platform
+import subprocess
+import time
+import warnings
+from contextlib import contextmanager
+from copy import deepcopy
+from pathlib import Path
+
+import torch
+import torch.distributed as dist
+import torch.nn as nn
+import torch.nn.functional as F
+from torch.nn.parallel import DistributedDataParallel as DDP
+
+from utils.general import LOGGER, check_version, colorstr, file_date, git_describe
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+try:
+ import thop # for FLOPs computation
+except ImportError:
+ thop = None
+
+# Suppress PyTorch warnings
+warnings.filterwarnings('ignore', message='User provided device_type of \'cuda\', but CUDA is not available. Disabling')
+
+
+def smart_inference_mode(torch_1_9=check_version(torch.__version__, '1.9.0')):
+ # Applies torch.inference_mode() decorator if torch>=1.9.0 else torch.no_grad() decorator
+ def decorate(fn):
+ return (torch.inference_mode if torch_1_9 else torch.no_grad)()(fn)
+
+ return decorate
+
+
+def smartCrossEntropyLoss(label_smoothing=0.0):
+ # Returns nn.CrossEntropyLoss with label smoothing enabled for torch>=1.10.0
+ if check_version(torch.__version__, '1.10.0'):
+ return nn.CrossEntropyLoss(label_smoothing=label_smoothing)
+ if label_smoothing > 0:
+ LOGGER.warning(f'WARNING: label smoothing {label_smoothing} requires torch>=1.10.0')
+ return nn.CrossEntropyLoss()
+
+
+def smart_DDP(model):
+ # Model DDP creation with checks
+ assert not check_version(torch.__version__, '1.12.0', pinned=True), \
+ 'torch==1.12.0 torchvision==0.13.0 DDP training is not supported due to a known issue. ' \
+ 'Please upgrade or downgrade torch to use DDP. See https://github.com/ultralytics/yolov5/issues/8395'
+ if check_version(torch.__version__, '1.11.0'):
+ return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK, static_graph=True)
+ else:
+ return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK)
+
+
+def reshape_classifier_output(model, n=1000):
+ # Update a TorchVision classification model to class count 'n' if required
+ from models.common import Classify
+ name, m = list((model.model if hasattr(model, 'model') else model).named_children())[-1] # last module
+ if isinstance(m, Classify): # YOLOv5 Classify() head
+ if m.linear.out_features != n:
+ m.linear = nn.Linear(m.linear.in_features, n)
+ elif isinstance(m, nn.Linear): # ResNet, EfficientNet
+ if m.out_features != n:
+ setattr(model, name, nn.Linear(m.in_features, n))
+ elif isinstance(m, nn.Sequential):
+ types = [type(x) for x in m]
+ if nn.Linear in types:
+ i = types.index(nn.Linear) # nn.Linear index
+ if m[i].out_features != n:
+ m[i] = nn.Linear(m[i].in_features, n)
+ elif nn.Conv2d in types:
+ i = types.index(nn.Conv2d) # nn.Conv2d index
+ if m[i].out_channels != n:
+ m[i] = nn.Conv2d(m[i].in_channels, n, m[i].kernel_size, m[i].stride, bias=m[i].bias)
+
+
+@contextmanager
+def torch_distributed_zero_first(local_rank: int):
+ # Decorator to make all processes in distributed training wait for each local_master to do something
+ if local_rank not in [-1, 0]:
+ dist.barrier(device_ids=[local_rank])
+ yield
+ if local_rank == 0:
+ dist.barrier(device_ids=[0])
+
+
+def device_count():
+ # Returns number of CUDA devices available. Safe version of torch.cuda.device_count(). Supports Linux and Windows
+ assert platform.system() in ('Linux', 'Windows'), 'device_count() only supported on Linux or Windows'
+ try:
+ cmd = 'nvidia-smi -L | wc -l' if platform.system() == 'Linux' else 'nvidia-smi -L | find /c /v ""' # Windows
+ return int(subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1])
+ except Exception:
+ return 0
+
+
+def select_device(device='', batch_size=0, newline=True):
+ # device = None or 'cpu' or 0 or '0' or '0,1,2,3'
+ s = f'YOLOv5 🚀 {git_describe() or file_date()} Python-{platform.python_version()} torch-{torch.__version__} '
+ device = str(device).strip().lower().replace('cuda:', '').replace('none', '') # to string, 'cuda:0' to '0'
+ cpu = device == 'cpu'
+ mps = device == 'mps' # Apple Metal Performance Shaders (MPS)
+ if cpu or mps:
+ os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
+ elif device: # non-cpu device requested
+ os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable - must be before assert is_available()
+ assert torch.cuda.is_available() and torch.cuda.device_count() >= len(device.replace(',', '')), \
+ f"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)"
+
+ if not cpu and not mps and torch.cuda.is_available(): # prefer GPU if available
+ devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7
+ n = len(devices) # device count
+ if n > 1 and batch_size > 0: # check batch_size is divisible by device_count
+ assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
+ space = ' ' * (len(s) + 1)
+ for i, d in enumerate(devices):
+ p = torch.cuda.get_device_properties(i)
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / (1 << 20):.0f}MiB)\n" # bytes to MB
+ arg = 'cuda:0'
+ elif mps and getattr(torch, 'has_mps', False) and torch.backends.mps.is_available(): # prefer MPS if available
+ s += 'MPS\n'
+ arg = 'mps'
+ else: # revert to CPU
+ s += 'CPU\n'
+ arg = 'cpu'
+
+ if not newline:
+ s = s.rstrip()
+ LOGGER.info(s)
+ return torch.device(arg)
+
+
+def time_sync():
+ # PyTorch-accurate time
+ if torch.cuda.is_available():
+ torch.cuda.synchronize()
+ return time.time()
+
+
+def profile(input, ops, n=10, device=None):
+ """ YOLOv5 speed/memory/FLOPs profiler
+ Usage:
+ input = torch.randn(16, 3, 640, 640)
+ m1 = lambda x: x * torch.sigmoid(x)
+ m2 = nn.SiLU()
+ profile(input, [m1, m2], n=100) # profile over 100 iterations
+ """
+ results = []
+ if not isinstance(device, torch.device):
+ device = select_device(device)
+ print(f"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}"
+ f"{'input':>24s}{'output':>24s}")
+
+ for x in input if isinstance(input, list) else [input]:
+ x = x.to(device)
+ x.requires_grad = True
+ for m in ops if isinstance(ops, list) else [ops]:
+ m = m.to(device) if hasattr(m, 'to') else m # device
+ m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m
+ tf, tb, t = 0, 0, [0, 0, 0] # dt forward, backward
+ try:
+ flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPs
+ except Exception:
+ flops = 0
+
+ try:
+ for _ in range(n):
+ t[0] = time_sync()
+ y = m(x)
+ t[1] = time_sync()
+ try:
+ _ = (sum(yi.sum() for yi in y) if isinstance(y, list) else y).sum().backward()
+ t[2] = time_sync()
+ except Exception: # no backward method
+ # print(e) # for debug
+ t[2] = float('nan')
+ tf += (t[1] - t[0]) * 1000 / n # ms per op forward
+ tb += (t[2] - t[1]) * 1000 / n # ms per op backward
+ mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0 # (GB)
+ s_in, s_out = (tuple(x.shape) if isinstance(x, torch.Tensor) else 'list' for x in (x, y)) # shapes
+ p = sum(x.numel() for x in m.parameters()) if isinstance(m, nn.Module) else 0 # parameters
+ print(f'{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}')
+ results.append([p, flops, mem, tf, tb, s_in, s_out])
+ except Exception as e:
+ print(e)
+ results.append(None)
+ torch.cuda.empty_cache()
+ return results
+
+
+def is_parallel(model):
+ # Returns True if model is of type DP or DDP
+ return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
+
+
+def de_parallel(model):
+ # De-parallelize a model: returns single-GPU model if model is of type DP or DDP
+ return model.module if is_parallel(model) else model
+
+
+def initialize_weights(model):
+ for m in model.modules():
+ t = type(m)
+ if t is nn.Conv2d:
+ pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
+ elif t is nn.BatchNorm2d:
+ m.eps = 1e-3
+ m.momentum = 0.03
+ elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
+ m.inplace = True
+
+
+def find_modules(model, mclass=nn.Conv2d):
+ # Finds layer indices matching module class 'mclass'
+ return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
+
+
+def sparsity(model):
+ # Return global model sparsity
+ a, b = 0, 0
+ for p in model.parameters():
+ a += p.numel()
+ b += (p == 0).sum()
+ return b / a
+
+
+def prune(model, amount=0.3):
+ # Prune model to requested global sparsity
+ import torch.nn.utils.prune as prune
+ for name, m in model.named_modules():
+ if isinstance(m, nn.Conv2d):
+ prune.l1_unstructured(m, name='weight', amount=amount) # prune
+ prune.remove(m, 'weight') # make permanent
+ LOGGER.info(f'Model pruned to {sparsity(model):.3g} global sparsity')
+
+
+def fuse_conv_and_bn(conv, bn):
+ # Fuse Conv2d() and BatchNorm2d() layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
+ fusedconv = nn.Conv2d(conv.in_channels,
+ conv.out_channels,
+ kernel_size=conv.kernel_size,
+ stride=conv.stride,
+ padding=conv.padding,
+ groups=conv.groups,
+ bias=True).requires_grad_(False).to(conv.weight.device)
+
+ # Prepare filters
+ w_conv = conv.weight.clone().view(conv.out_channels, -1)
+ w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
+ fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
+
+ # Prepare spatial bias
+ b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
+ b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
+ fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
+
+ return fusedconv
+
+
+def model_info(model, verbose=False, imgsz=640):
+ # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
+ n_p = sum(x.numel() for x in model.parameters()) # number parameters
+ n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
+ if verbose:
+ print(f"{'layer':>5} {'name':>40} {'gradient':>9} {'parameters':>12} {'shape':>20} {'mu':>10} {'sigma':>10}")
+ for i, (name, p) in enumerate(model.named_parameters()):
+ name = name.replace('module_list.', '')
+ print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
+ (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
+
+ try: # FLOPs
+ p = next(model.parameters())
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32 # max stride
+ im = torch.empty((1, p.shape[1], stride, stride), device=p.device) # input image in BCHW format
+ flops = thop.profile(deepcopy(model), inputs=(im,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
+ imgsz = imgsz if isinstance(imgsz, list) else [imgsz, imgsz] # expand if int/float
+ fs = f', {flops * imgsz[0] / stride * imgsz[1] / stride:.1f} GFLOPs' # 640x640 GFLOPs
+ except Exception:
+ fs = ''
+
+ name = Path(model.yaml_file).stem.replace('yolov5', 'YOLOv5') if hasattr(model, 'yaml_file') else 'Model'
+ LOGGER.info(f"{name} summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
+
+
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # Scales img(bs,3,y,x) by ratio constrained to gs-multiple
+ if ratio == 1.0:
+ return img
+ h, w = img.shape[2:]
+ s = (int(h * ratio), int(w * ratio)) # new size
+ img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
+ if not same_shape: # pad/crop img
+ h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))
+ return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
+
+
+def copy_attr(a, b, include=(), exclude=()):
+ # Copy attributes from b to a, options to only include [...] and to exclude [...]
+ for k, v in b.__dict__.items():
+ if (len(include) and k not in include) or k.startswith('_') or k in exclude:
+ continue
+ else:
+ setattr(a, k, v)
+
+
+def smart_optimizer(model, name='Adam', lr=0.001, momentum=0.9, decay=1e-5):
+ # YOLOv5 3-param group optimizer: 0) weights with decay, 1) weights no decay, 2) biases no decay
+ g = [], [], [] # optimizer parameter groups
+ bn = tuple(v for k, v in nn.__dict__.items() if 'Norm' in k) # normalization layers, i.e. BatchNorm2d()
+ for v in model.modules():
+ if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter): # bias (no decay)
+ g[2].append(v.bias)
+ if isinstance(v, bn): # weight (no decay)
+ g[1].append(v.weight)
+ elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter): # weight (with decay)
+ g[0].append(v.weight)
+ if hasattr(v, 'im'):
+ if hasattr(v.im, 'implicit'):
+ g[1].append(v.im.implicit)
+ else:
+ for iv in v.im:
+ g[1].append(iv.implicit)
+ if hasattr(v, 'ia'):
+ if hasattr(v.ia, 'implicit'):
+ g[1].append(v.ia.implicit)
+ else:
+ for iv in v.ia:
+ g[1].append(iv.implicit)
+
+ if name == 'Adam':
+ optimizer = torch.optim.Adam(g[2], lr=lr, betas=(momentum, 0.999)) # adjust beta1 to momentum
+ elif name == 'AdamW':
+ optimizer = torch.optim.AdamW(g[2], lr=lr, betas=(momentum, 0.999), weight_decay=0.0)
+ elif name == 'RMSProp':
+ optimizer = torch.optim.RMSprop(g[2], lr=lr, momentum=momentum)
+ elif name == 'SGD':
+ optimizer = torch.optim.SGD(g[2], lr=lr, momentum=momentum, nesterov=True)
+ else:
+ raise NotImplementedError(f'Optimizer {name} not implemented.')
+
+ optimizer.add_param_group({'params': g[0], 'weight_decay': decay}) # add g0 with weight_decay
+ optimizer.add_param_group({'params': g[1], 'weight_decay': 0.0}) # add g1 (BatchNorm2d weights)
+ LOGGER.info(f"{colorstr('optimizer:')} {type(optimizer).__name__}(lr={lr}) with parameter groups "
+ f"{len(g[1])} weight(decay=0.0), {len(g[0])} weight(decay={decay}), {len(g[2])} bias")
+ return optimizer
+
+
+def smart_hub_load(repo='ultralytics/yolov5', model='yolov5s', **kwargs):
+ # YOLOv5 torch.hub.load() wrapper with smart error/issue handling
+ if check_version(torch.__version__, '1.9.1'):
+ kwargs['skip_validation'] = True # validation causes GitHub API rate limit errors
+ if check_version(torch.__version__, '1.12.0'):
+ kwargs['trust_repo'] = True # argument required starting in torch 0.12
+ try:
+ return torch.hub.load(repo, model, **kwargs)
+ except Exception:
+ return torch.hub.load(repo, model, force_reload=True, **kwargs)
+
+
+def smart_resume(ckpt, optimizer, ema=None, weights='yolov5s.pt', epochs=300, resume=True):
+ # Resume training from a partially trained checkpoint
+ best_fitness = 0.0
+ start_epoch = ckpt['epoch'] + 1
+ if ckpt['optimizer'] is not None:
+ optimizer.load_state_dict(ckpt['optimizer']) # optimizer
+ best_fitness = ckpt['best_fitness']
+ if ema and ckpt.get('ema'):
+ ema.ema.load_state_dict(ckpt['ema'].float().state_dict()) # EMA
+ ema.updates = ckpt['updates']
+ if resume:
+ assert start_epoch > 0, f'{weights} training to {epochs} epochs is finished, nothing to resume.\n' \
+ f"Start a new training without --resume, i.e. 'python train.py --weights {weights}'"
+ LOGGER.info(f'Resuming training from {weights} from epoch {start_epoch} to {epochs} total epochs')
+ if epochs < start_epoch:
+ LOGGER.info(f"{weights} has been trained for {ckpt['epoch']} epochs. Fine-tuning for {epochs} more epochs.")
+ epochs += ckpt['epoch'] # finetune additional epochs
+ return best_fitness, start_epoch, epochs
+
+
+class EarlyStopping:
+ # YOLOv5 simple early stopper
+ def __init__(self, patience=30):
+ self.best_fitness = 0.0 # i.e. mAP
+ self.best_epoch = 0
+ self.patience = patience or float('inf') # epochs to wait after fitness stops improving to stop
+ self.possible_stop = False # possible stop may occur next epoch
+
+ def __call__(self, epoch, fitness):
+ if fitness >= self.best_fitness: # >= 0 to allow for early zero-fitness stage of training
+ self.best_epoch = epoch
+ self.best_fitness = fitness
+ delta = epoch - self.best_epoch # epochs without improvement
+ self.possible_stop = delta >= (self.patience - 1) # possible stop may occur next epoch
+ stop = delta >= self.patience # stop training if patience exceeded
+ if stop:
+ LOGGER.info(f'Stopping training early as no improvement observed in last {self.patience} epochs. '
+ f'Best results observed at epoch {self.best_epoch}, best model saved as best.pt.\n'
+ f'To update EarlyStopping(patience={self.patience}) pass a new patience value, '
+ f'i.e. `python train.py --patience 300` or use `--patience 0` to disable EarlyStopping.')
+ return stop
+
+
+class ModelEMA:
+ """ Updated Exponential Moving Average (EMA) from https://github.com/rwightman/pytorch-image-models
+ Keeps a moving average of everything in the model state_dict (parameters and buffers)
+ For EMA details see https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
+ """
+
+ def __init__(self, model, decay=0.9999, tau=2000, updates=0):
+ # Create EMA
+ self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA
+ self.updates = updates # number of EMA updates
+ self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)
+ for p in self.ema.parameters():
+ p.requires_grad_(False)
+
+ def update(self, model):
+ # Update EMA parameters
+ self.updates += 1
+ d = self.decay(self.updates)
+
+ msd = de_parallel(model).state_dict() # model state_dict
+ for k, v in self.ema.state_dict().items():
+ if v.dtype.is_floating_point: # true for FP16 and FP32
+ v *= d
+ v += (1 - d) * msd[k].detach()
+ # assert v.dtype == msd[k].dtype == torch.float32, f'{k}: EMA {v.dtype} and model {msd[k].dtype} must be FP32'
+
+ def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
+ # Update EMA attributes
+ copy_attr(self.ema, model, include, exclude)
diff --git a/ipex/seg/val.py b/ipex/seg/val.py
new file mode 100644
index 000000000..ebe6aff3b
--- /dev/null
+++ b/ipex/seg/val.py
@@ -0,0 +1,405 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a trained YOLOv5 detection model on a detection dataset
+
+Usage:
+ $ python val.py --weights yolov5s.pt --data coco128.yaml --img 640
+
+Usage - formats:
+ $ python val.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import json
+import os
+import sys
+from pathlib import Path
+
+import numpy as np
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.callbacks import Callbacks
+from utils.dataloaders import create_dataloader
+from utils.general import (LOGGER, Profile, check_dataset, check_img_size, check_requirements, check_yaml,
+ coco80_to_coco91_class, colorstr, increment_path, non_max_suppression, print_args,
+ scale_coords, xywh2xyxy, xyxy2xywh)
+from utils.metrics import ConfusionMatrix, ap_per_class, box_iou
+from utils.plots import output_to_target, plot_images, plot_val_study
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+def save_one_txt(predn, save_conf, shape, file):
+ # Save one txt result
+ gn = torch.tensor(shape)[[1, 0, 1, 0]] # normalization gain whwh
+ for *xyxy, conf, cls in predn.tolist():
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(file, 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+
+def save_one_json(predn, jdict, path, class_map):
+ # Save one JSON result {"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}
+ image_id = int(path.stem) if path.stem.isnumeric() else path.stem
+ box = xyxy2xywh(predn[:, :4]) # xywh
+ box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
+ for p, b in zip(predn.tolist(), box.tolist()):
+ jdict.append({
+ 'image_id': image_id,
+ 'category_id': class_map[int(p[5])],
+ 'bbox': [round(x, 3) for x in b],
+ 'score': round(p[4], 5)})
+
+
+def process_batch(detections, labels, iouv):
+ """
+ Return correct prediction matrix
+ Arguments:
+ detections (array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ correct (array[N, 10]), for 10 IoU levels
+ """
+ correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+ correct_class = labels[:, 0:1] == detections[:, 5]
+ for i in range(len(iouv)):
+ x = torch.where((iou >= iouv[i]) & correct_class) # IoU > threshold and classes match
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detect, iou]
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ # matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ correct[matches[:, 1].astype(int), i] = True
+ return torch.tensor(correct, dtype=torch.bool, device=iouv.device)
+
+
+@smart_inference_mode()
+def run(
+ data,
+ weights=None, # model.pt path(s)
+ batch_size=32, # batch size
+ imgsz=640, # inference size (pixels)
+ conf_thres=0.001, # confidence threshold
+ iou_thres=0.6, # NMS IoU threshold
+ max_det=300, # maximum detections per image
+ task='val', # train, val, test, speed or study
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ workers=8, # max dataloader workers (per RANK in DDP mode)
+ single_cls=False, # treat as single-class dataset
+ augment=False, # augmented inference
+ verbose=False, # verbose output
+ save_txt=False, # save results to *.txt
+ save_hybrid=False, # save label+prediction hybrid results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_json=False, # save a COCO-JSON results file
+ project=ROOT / 'runs/val', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=True, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ model=None,
+ dataloader=None,
+ save_dir=Path(''),
+ plots=True,
+ callbacks=Callbacks(),
+ compute_loss=None,
+):
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ model.half() if half else model.float()
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ if engine:
+ batch_size = model.batch_size
+ else:
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
+
+ # Data
+ data = check_dataset(data) # check
+
+ # Configure
+ model.eval()
+ cuda = device.type != 'cpu'
+ is_coco = isinstance(data.get('val'), str) and data['val'].endswith(f'coco{os.sep}val2017.txt') # COCO dataset
+ nc = 1 if single_cls else int(data['nc']) # number of classes
+ iouv = torch.linspace(0.5, 0.95, 10, device=device) # iou vector for mAP@0.5:0.95
+ niou = iouv.numel()
+
+ # Dataloader
+ if not training:
+ if pt and not single_cls: # check --weights are trained on --data
+ ncm = model.model.nc
+ assert ncm == nc, f'{weights} ({ncm} classes) trained on different --data than what you passed ({nc} ' \
+ f'classes). Pass correct combination of --weights and --data that are trained together.'
+ model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
+ pad = 0.0 if task in ('speed', 'benchmark') else 0.5
+ rect = False if task == 'benchmark' else pt # square inference for benchmarks
+ task = task if task in ('train', 'val', 'test') else 'val' # path to train/val/test images
+ dataloader = create_dataloader(data[task],
+ imgsz,
+ batch_size,
+ stride,
+ single_cls,
+ pad=pad,
+ rect=rect,
+ workers=workers,
+ prefix=colorstr(f'{task}: '))[0]
+
+ seen = 0
+ confusion_matrix = ConfusionMatrix(nc=nc)
+ names = model.names if hasattr(model, 'names') else model.module.names # get class names
+ if isinstance(names, (list, tuple)): # old format
+ names = dict(enumerate(names))
+ class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
+ s = ('%22s' + '%11s' * 6) % ('Class', 'Images', 'Instances', 'P', 'R', 'mAP50', 'mAP50-95')
+ dt, p, r, f1, mp, mr, map50, map = (Profile(), Profile(), Profile()), 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
+ loss = torch.zeros(3, device=device)
+ jdict, stats, ap, ap_class = [], [], [], []
+ callbacks.run('on_val_start')
+ pbar = tqdm(dataloader, desc=s, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ for batch_i, (im, targets, paths, shapes) in enumerate(pbar):
+ callbacks.run('on_val_batch_start')
+ with dt[0]:
+ if cuda:
+ im = im.to(device, non_blocking=True)
+ targets = targets.to(device)
+ im = im.half() if half else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ nb, _, height, width = im.shape # batch size, channels, height, width
+
+ # Inference
+ with dt[1]:
+ out, train_out = model(im) if training else model(im, augment=augment, val=True) # inference, loss outputs
+
+ # Loss
+ if compute_loss:
+ loss += compute_loss([x.float() for x in train_out], targets)[1] # box, obj, cls
+
+ # NMS
+ targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
+ lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
+ with dt[2]:
+ out = non_max_suppression(out,
+ conf_thres,
+ iou_thres,
+ labels=lb,
+ multi_label=True,
+ agnostic=single_cls,
+ max_det=max_det)
+
+ # Metrics
+ for si, pred in enumerate(out):
+ labels = targets[targets[:, 0] == si, 1:]
+ nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
+ path, shape = Path(paths[si]), shapes[si][0]
+ correct = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
+ seen += 1
+
+ if npr == 0:
+ if nl:
+ stats.append((correct, *torch.zeros((2, 0), device=device), labels[:, 0]))
+ if plots:
+ confusion_matrix.process_batch(detections=None, labels=labels[:, 0])
+ continue
+
+ # Predictions
+ if single_cls:
+ pred[:, 5] = 0
+ predn = pred.clone()
+ scale_coords(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
+
+ # Evaluate
+ if nl:
+ tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
+ scale_coords(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
+ labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
+ correct = process_batch(predn, labelsn, iouv)
+ if plots:
+ confusion_matrix.process_batch(predn, labelsn)
+ stats.append((correct, pred[:, 4], pred[:, 5], labels[:, 0])) # (correct, conf, pcls, tcls)
+
+ # Save/log
+ if save_txt:
+ save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / f'{path.stem}.txt')
+ if save_json:
+ save_one_json(predn, jdict, path, class_map) # append to COCO-JSON dictionary
+ callbacks.run('on_val_image_end', pred, predn, path, names, im[si])
+
+ # Plot images
+ if plots and batch_i < 3:
+ plot_images(im, targets, paths, save_dir / f'val_batch{batch_i}_labels.jpg', names) # labels
+ plot_images(im, output_to_target(out), paths, save_dir / f'val_batch{batch_i}_pred.jpg', names) # pred
+
+ callbacks.run('on_val_batch_end')
+
+ # Compute metrics
+ stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
+ if len(stats) and stats[0].any():
+ tp, fp, p, r, f1, ap, ap_class = ap_per_class(*stats, plot=plots, save_dir=save_dir, names=names)
+ ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95
+ mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
+ nt = np.bincount(stats[3].astype(int), minlength=nc) # number of targets per class
+
+ # Print results
+ pf = '%22s' + '%11i' * 2 + '%11.3g' * 4 # print format
+ LOGGER.info(pf % ('all', seen, nt.sum(), mp, mr, map50, map))
+ if nt.sum() == 0:
+ LOGGER.warning(f'WARNING: no labels found in {task} set, can not compute metrics without labels ⚠️')
+
+ # Print results per class
+ if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
+ for i, c in enumerate(ap_class):
+ LOGGER.info(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
+
+ # Print speeds
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
+ if not training:
+ shape = (batch_size, 3, imgsz, imgsz)
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}' % t)
+
+ # Plots
+ if plots:
+ confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
+ callbacks.run('on_val_end')
+
+ # Save JSON
+ if save_json and len(jdict):
+ w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
+ anno_json = str(Path(data.get('path', '../coco')) / 'annotations/instances_val2017.json') # annotations json
+ pred_json = str(save_dir / f"{w}_predictions.json") # predictions json
+ LOGGER.info(f'\nEvaluating pycocotools mAP... saving {pred_json}...')
+ with open(pred_json, 'w') as f:
+ json.dump(jdict, f)
+
+ try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
+ check_requirements(['pycocotools'])
+ from pycocotools.coco import COCO
+ from pycocotools.cocoeval import COCOeval
+
+ anno = COCO(anno_json) # init annotations api
+ pred = anno.loadRes(pred_json) # init predictions api
+ eval = COCOeval(anno, pred, 'bbox')
+ if is_coco:
+ eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.im_files] # image IDs to evaluate
+ eval.evaluate()
+ eval.accumulate()
+ eval.summarize()
+ map, map50 = eval.stats[:2] # update results (mAP@0.5:0.95, mAP@0.5)
+ except Exception as e:
+ LOGGER.info(f'pycocotools unable to run: {e}')
+
+ # Return results
+ model.float() # for training
+ if not training:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ maps = np.zeros(nc) + map
+ for i, c in enumerate(ap_class):
+ maps[c] = ap[i]
+ return (mp, mr, map50, map, *(loss.cpu() / len(dataloader)).tolist()), maps, t
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)')
+ parser.add_argument('--batch-size', type=int, default=32, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=300, help='maximum detections per image')
+ parser.add_argument('--task', default='val', help='train, val, test, speed or study')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--verbose', action='store_true', help='report mAP by class')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-json', action='store_true', help='save a COCO-JSON results file')
+ parser.add_argument('--project', default=ROOT / 'runs/val', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.data = check_yaml(opt.data) # check YAML
+ opt.save_json |= opt.data.endswith('coco.yaml')
+ opt.save_txt |= opt.save_hybrid
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ #check_requirements(requirements=ROOT / 'requirements.txt', exclude=('tensorboard', 'thop'))
+
+ if opt.task in ('train', 'val', 'test'): # run normally
+ if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
+ LOGGER.info(f'WARNING: confidence threshold {opt.conf_thres} > 0.001 produces invalid results ⚠️')
+ if opt.save_hybrid:
+ LOGGER.info('WARNING: --save-hybrid will return high mAP from hybrid labels, not from predictions alone ⚠️')
+ run(**vars(opt))
+
+ else:
+ weights = opt.weights if isinstance(opt.weights, list) else [opt.weights]
+ opt.half = True # FP16 for fastest results
+ if opt.task == 'speed': # speed benchmarks
+ # python val.py --task speed --data coco.yaml --batch 1 --weights yolov5n.pt yolov5s.pt...
+ opt.conf_thres, opt.iou_thres, opt.save_json = 0.25, 0.45, False
+ for opt.weights in weights:
+ run(**vars(opt), plots=False)
+
+ elif opt.task == 'study': # speed vs mAP benchmarks
+ # python val.py --task study --data coco.yaml --iou 0.7 --weights yolov5n.pt yolov5s.pt...
+ for opt.weights in weights:
+ f = f'study_{Path(opt.data).stem}_{Path(opt.weights).stem}.txt' # filename to save to
+ x, y = list(range(256, 1536 + 128, 128)), [] # x axis (image sizes), y axis
+ for opt.imgsz in x: # img-size
+ LOGGER.info(f'\nRunning {f} --imgsz {opt.imgsz}...')
+ r, _, t = run(**vars(opt), plots=False)
+ y.append(r + t) # results and times
+ np.savetxt(f, y, fmt='%10.4g') # save
+ os.system('zip -r study.zip study_*.txt')
+ plot_val_study(x=x) # plot
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/ipex/test.py b/ipex/test.py
new file mode 100644
index 000000000..17b48060b
--- /dev/null
+++ b/ipex/test.py
@@ -0,0 +1,353 @@
+import argparse
+import json
+import os
+from pathlib import Path
+from threading import Thread
+
+import numpy as np
+import torch
+import yaml
+from tqdm import tqdm
+
+from models.experimental import attempt_load
+from utils.datasets import create_dataloader
+from utils.general import coco80_to_coco91_class, check_dataset, check_file, check_img_size, check_requirements, \
+ box_iou, non_max_suppression, scale_coords, xyxy2xywh, xywh2xyxy, set_logging, increment_path, colorstr
+from utils.metrics import ap_per_class, ConfusionMatrix
+from utils.plots import plot_images, output_to_target, plot_study_txt
+from utils.torch_utils import select_device, time_synchronized, TracedModel
+
+
+def test(data,
+ weights=None,
+ batch_size=32,
+ imgsz=640,
+ conf_thres=0.001,
+ iou_thres=0.6, # for NMS
+ save_json=False,
+ single_cls=False,
+ augment=False,
+ verbose=False,
+ model=None,
+ dataloader=None,
+ save_dir=Path(''), # for saving images
+ save_txt=False, # for auto-labelling
+ save_hybrid=False, # for hybrid auto-labelling
+ save_conf=False, # save auto-label confidences
+ plots=True,
+ wandb_logger=None,
+ compute_loss=None,
+ half_precision=True,
+ trace=False,
+ is_coco=False,
+ v5_metric=False):
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device = next(model.parameters()).device # get model device
+
+ else: # called directly
+ set_logging()
+ device = select_device(opt.device, batch_size=batch_size)
+
+ # Directories
+ save_dir = Path(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok)) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = attempt_load(weights, map_location=device) # load FP32 model
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ imgsz = check_img_size(imgsz, s=gs) # check img_size
+
+ if trace:
+ model = TracedModel(model, device, imgsz)
+
+ # Half
+ half = device.type != 'cpu' and half_precision # half precision only supported on CUDA
+ if half:
+ model.half()
+
+ # Configure
+ model.eval()
+ if isinstance(data, str):
+ is_coco = data.endswith('coco.yaml')
+ with open(data) as f:
+ data = yaml.load(f, Loader=yaml.SafeLoader)
+ check_dataset(data) # check
+ nc = 1 if single_cls else int(data['nc']) # number of classes
+ iouv = torch.linspace(0.5, 0.95, 10).to(device) # iou vector for mAP@0.5:0.95
+ niou = iouv.numel()
+
+ # Logging
+ log_imgs = 0
+ if wandb_logger and wandb_logger.wandb:
+ log_imgs = min(wandb_logger.log_imgs, 100)
+ # Dataloader
+ if not training:
+ if device.type != 'cpu':
+ model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
+ task = opt.task if opt.task in ('train', 'val', 'test') else 'val' # path to train/val/test images
+ dataloader = create_dataloader(data[task], imgsz, batch_size, gs, opt, pad=0.5, rect=True,
+ prefix=colorstr(f'{task}: '))[0]
+
+ if v5_metric:
+ print("Testing with YOLOv5 AP metric...")
+
+ seen = 0
+ confusion_matrix = ConfusionMatrix(nc=nc)
+ names = {k: v for k, v in enumerate(model.names if hasattr(model, 'names') else model.module.names)}
+ coco91class = coco80_to_coco91_class()
+ s = ('%20s' + '%12s' * 6) % ('Class', 'Images', 'Labels', 'P', 'R', 'mAP@.5', 'mAP@.5:.95')
+ p, r, f1, mp, mr, map50, map, t0, t1 = 0., 0., 0., 0., 0., 0., 0., 0., 0.
+ loss = torch.zeros(3, device=device)
+ jdict, stats, ap, ap_class, wandb_images = [], [], [], [], []
+ for batch_i, (img, targets, paths, shapes) in enumerate(tqdm(dataloader, desc=s)):
+ img = img.to(device, non_blocking=True)
+ img = img.half() if half else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ targets = targets.to(device)
+ nb, _, height, width = img.shape # batch size, channels, height, width
+
+ with torch.no_grad():
+ # Run model
+ t = time_synchronized()
+ out, train_out = model(img, augment=augment) # inference and training outputs
+ t0 += time_synchronized() - t
+
+ # Compute loss
+ if compute_loss:
+ loss += compute_loss([x.float() for x in train_out], targets)[1][:3] # box, obj, cls
+
+ # Run NMS
+ targets[:, 2:] *= torch.Tensor([width, height, width, height]).to(device) # to pixels
+ lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
+ t = time_synchronized()
+ out = non_max_suppression(out, conf_thres=conf_thres, iou_thres=iou_thres, labels=lb, multi_label=True)
+ t1 += time_synchronized() - t
+
+ # Statistics per image
+ for si, pred in enumerate(out):
+ labels = targets[targets[:, 0] == si, 1:]
+ nl = len(labels)
+ tcls = labels[:, 0].tolist() if nl else [] # target class
+ path = Path(paths[si])
+ seen += 1
+
+ if len(pred) == 0:
+ if nl:
+ stats.append((torch.zeros(0, niou, dtype=torch.bool), torch.Tensor(), torch.Tensor(), tcls))
+ continue
+
+ # Predictions
+ predn = pred.clone()
+ scale_coords(img[si].shape[1:], predn[:, :4], shapes[si][0], shapes[si][1]) # native-space pred
+
+ # Append to text file
+ if save_txt:
+ gn = torch.tensor(shapes[si][0])[[1, 0, 1, 0]] # normalization gain whwh
+ for *xyxy, conf, cls in predn.tolist():
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(save_dir / 'labels' / (path.stem + '.txt'), 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+ # W&B logging - Media Panel Plots
+ if len(wandb_images) < log_imgs and wandb_logger.current_epoch > 0: # Check for test operation
+ if wandb_logger.current_epoch % wandb_logger.bbox_interval == 0:
+ box_data = [{"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": "%s %.3f" % (names[cls], conf),
+ "scores": {"class_score": conf},
+ "domain": "pixel"} for *xyxy, conf, cls in pred.tolist()]
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ wandb_images.append(wandb_logger.wandb.Image(img[si], boxes=boxes, caption=path.name))
+ wandb_logger.log_training_progress(predn, path, names) if wandb_logger and wandb_logger.wandb_run else None
+
+ # Append to pycocotools JSON dictionary
+ if save_json:
+ # [{"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}, ...
+ image_id = int(path.stem) if path.stem.isnumeric() else path.stem
+ box = xyxy2xywh(predn[:, :4]) # xywh
+ box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
+ for p, b in zip(pred.tolist(), box.tolist()):
+ jdict.append({'image_id': image_id,
+ 'category_id': coco91class[int(p[5])] if is_coco else int(p[5]),
+ 'bbox': [round(x, 3) for x in b],
+ 'score': round(p[4], 5)})
+
+ # Assign all predictions as incorrect
+ correct = torch.zeros(pred.shape[0], niou, dtype=torch.bool, device=device)
+ if nl:
+ detected = [] # target indices
+ tcls_tensor = labels[:, 0]
+
+ # target boxes
+ tbox = xywh2xyxy(labels[:, 1:5])
+ scale_coords(img[si].shape[1:], tbox, shapes[si][0], shapes[si][1]) # native-space labels
+ if plots:
+ confusion_matrix.process_batch(predn, torch.cat((labels[:, 0:1], tbox), 1))
+
+ # Per target class
+ for cls in torch.unique(tcls_tensor):
+ ti = (cls == tcls_tensor).nonzero(as_tuple=False).view(-1) # prediction indices
+ pi = (cls == pred[:, 5]).nonzero(as_tuple=False).view(-1) # target indices
+
+ # Search for detections
+ if pi.shape[0]:
+ # Prediction to target ious
+ ious, i = box_iou(predn[pi, :4], tbox[ti]).max(1) # best ious, indices
+
+ # Append detections
+ detected_set = set()
+ for j in (ious > iouv[0]).nonzero(as_tuple=False):
+ d = ti[i[j]] # detected target
+ if d.item() not in detected_set:
+ detected_set.add(d.item())
+ detected.append(d)
+ correct[pi[j]] = ious[j] > iouv # iou_thres is 1xn
+ if len(detected) == nl: # all targets already located in image
+ break
+
+ # Append statistics (correct, conf, pcls, tcls)
+ stats.append((correct.cpu(), pred[:, 4].cpu(), pred[:, 5].cpu(), tcls))
+
+ # Plot images
+ if plots and batch_i < 3:
+ f = save_dir / f'test_batch{batch_i}_labels.jpg' # labels
+ Thread(target=plot_images, args=(img, targets, paths, f, names), daemon=True).start()
+ f = save_dir / f'test_batch{batch_i}_pred.jpg' # predictions
+ Thread(target=plot_images, args=(img, output_to_target(out), paths, f, names), daemon=True).start()
+
+ # Compute statistics
+ stats = [np.concatenate(x, 0) for x in zip(*stats)] # to numpy
+ if len(stats) and stats[0].any():
+ p, r, ap, f1, ap_class = ap_per_class(*stats, plot=plots, v5_metric=v5_metric, save_dir=save_dir, names=names)
+ ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95
+ mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
+ nt = np.bincount(stats[3].astype(np.int64), minlength=nc) # number of targets per class
+ else:
+ nt = torch.zeros(1)
+
+ # Print results
+ pf = '%20s' + '%12i' * 2 + '%12.3g' * 4 # print format
+ print(pf % ('all', seen, nt.sum(), mp, mr, map50, map))
+
+ # Print results per class
+ if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
+ for i, c in enumerate(ap_class):
+ print(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
+
+ # Print speeds
+ t = tuple(x / seen * 1E3 for x in (t0, t1, t0 + t1)) + (imgsz, imgsz, batch_size) # tuple
+ if not training:
+ print('Speed: %.1f/%.1f/%.1f ms inference/NMS/total per %gx%g image at batch-size %g' % t)
+
+ # Plots
+ if plots:
+ confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
+ if wandb_logger and wandb_logger.wandb:
+ val_batches = [wandb_logger.wandb.Image(str(f), caption=f.name) for f in sorted(save_dir.glob('test*.jpg'))]
+ wandb_logger.log({"Validation": val_batches})
+ if wandb_images:
+ wandb_logger.log({"Bounding Box Debugger/Images": wandb_images})
+
+ # Save JSON
+ if save_json and len(jdict):
+ w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
+ anno_json = './coco/annotations/instances_val2017.json' # annotations json
+ pred_json = str(save_dir / f"{w}_predictions.json") # predictions json
+ print('\nEvaluating pycocotools mAP... saving %s...' % pred_json)
+ with open(pred_json, 'w') as f:
+ json.dump(jdict, f)
+
+ try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
+ from pycocotools.coco import COCO
+ from pycocotools.cocoeval import COCOeval
+
+ anno = COCO(anno_json) # init annotations api
+ pred = anno.loadRes(pred_json) # init predictions api
+ eval = COCOeval(anno, pred, 'bbox')
+ if is_coco:
+ eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.img_files] # image IDs to evaluate
+ eval.evaluate()
+ eval.accumulate()
+ eval.summarize()
+ map, map50 = eval.stats[:2] # update results (mAP@0.5:0.95, mAP@0.5)
+ except Exception as e:
+ print(f'pycocotools unable to run: {e}')
+
+ # Return results
+ model.float() # for training
+ if not training:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ print(f"Results saved to {save_dir}{s}")
+ maps = np.zeros(nc) + map
+ for i, c in enumerate(ap_class):
+ maps[c] = ap[i]
+ return (mp, mr, map50, map, *(loss.cpu() / len(dataloader)).tolist()), maps, t
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser(prog='test.py')
+ parser.add_argument('--weights', nargs='+', type=str, default='yolov7.pt', help='model.pt path(s)')
+ parser.add_argument('--data', type=str, default='data/coco.yaml', help='*.data path')
+ parser.add_argument('--batch-size', type=int, default=32, help='size of each image batch')
+ parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--conf-thres', type=float, default=0.001, help='object confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.65, help='IOU threshold for NMS')
+ parser.add_argument('--task', default='val', help='train, val, test, speed or study')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--verbose', action='store_true', help='report mAP by class')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-json', action='store_true', help='save a cocoapi-compatible JSON results file')
+ parser.add_argument('--project', default='runs/test', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--no-trace', action='store_true', help='don`t trace model')
+ parser.add_argument('--v5-metric', action='store_true', help='assume maximum recall as 1.0 in AP calculation')
+ opt = parser.parse_args()
+ opt.save_json |= opt.data.endswith('coco.yaml')
+ opt.data = check_file(opt.data) # check file
+ print(opt)
+ #check_requirements()
+
+ if opt.task in ('train', 'val', 'test'): # run normally
+ test(opt.data,
+ opt.weights,
+ opt.batch_size,
+ opt.img_size,
+ opt.conf_thres,
+ opt.iou_thres,
+ opt.save_json,
+ opt.single_cls,
+ opt.augment,
+ opt.verbose,
+ save_txt=opt.save_txt | opt.save_hybrid,
+ save_hybrid=opt.save_hybrid,
+ save_conf=opt.save_conf,
+ trace=not opt.no_trace,
+ v5_metric=opt.v5_metric
+ )
+
+ elif opt.task == 'speed': # speed benchmarks
+ for w in opt.weights:
+ test(opt.data, w, opt.batch_size, opt.img_size, 0.25, 0.45, save_json=False, plots=False, v5_metric=opt.v5_metric)
+
+ elif opt.task == 'study': # run over a range of settings and save/plot
+ # python test.py --task study --data coco.yaml --iou 0.65 --weights yolov7.pt
+ x = list(range(256, 1536 + 128, 128)) # x axis (image sizes)
+ for w in opt.weights:
+ f = f'study_{Path(opt.data).stem}_{Path(w).stem}.txt' # filename to save to
+ y = [] # y axis
+ for i in x: # img-size
+ print(f'\nRunning {f} point {i}...')
+ r, _, t = test(opt.data, w, opt.batch_size, i, opt.conf_thres, opt.iou_thres, opt.save_json,
+ plots=False, v5_metric=opt.v5_metric)
+ y.append(r + t) # results and times
+ np.savetxt(f, y, fmt='%10.4g') # save
+ os.system('zip -r study.zip study_*.txt')
+ plot_study_txt(x=x) # plot
diff --git a/ipex/train.py b/ipex/train.py
new file mode 100644
index 000000000..418edaf69
--- /dev/null
+++ b/ipex/train.py
@@ -0,0 +1,707 @@
+import argparse
+import logging
+import math
+import os
+import random
+import time
+from copy import deepcopy
+from pathlib import Path
+from threading import Thread
+
+import numpy as np
+import torch.distributed as dist
+import torch.nn as nn
+import torch.nn.functional as F
+import torch.optim as optim
+import torch.optim.lr_scheduler as lr_scheduler
+import torch.utils.data
+import yaml
+from torch.cuda import amp
+from torch.nn.parallel import DistributedDataParallel as DDP
+from torch.utils.tensorboard import SummaryWriter
+from tqdm import tqdm
+
+import test # import test.py to get mAP after each epoch
+from models.experimental import attempt_load
+from models.yolo import Model
+from utils.autoanchor import check_anchors
+from utils.datasets import create_dataloader
+from utils.general import labels_to_class_weights, increment_path, labels_to_image_weights, init_seeds, \
+ fitness, strip_optimizer, get_latest_run, check_dataset, check_file, check_git_status, check_img_size, \
+ check_requirements, print_mutation, set_logging, one_cycle, colorstr
+from utils.google_utils import attempt_download
+from utils.loss import ComputeLoss, ComputeLossOTA
+from utils.plots import plot_images, plot_labels, plot_results, plot_evolution
+from utils.torch_utils import ModelEMA, select_device, intersect_dicts, torch_distributed_zero_first, is_parallel
+from utils.wandb_logging.wandb_utils import WandbLogger, check_wandb_resume
+import intel_extension_for_pytorch as ipex
+
+logger = logging.getLogger(__name__)
+
+
+def train(hyp, opt, device, tb_writer=None):
+ logger.info(colorstr('hyperparameters: ') + ', '.join(f'{k}={v}' for k, v in hyp.items()))
+ save_dir, epochs, batch_size, total_batch_size, weights, rank, freeze = \
+ Path(opt.save_dir), opt.epochs, opt.batch_size, opt.total_batch_size, opt.weights, opt.global_rank, opt.freeze
+
+ # Directories
+ wdir = save_dir / 'weights'
+ wdir.mkdir(parents=True, exist_ok=True) # make dir
+ last = wdir / 'last.pt'
+ best = wdir / 'best.pt'
+ results_file = save_dir / 'results.txt'
+
+ # Save run settings
+ with open(save_dir / 'hyp.yaml', 'w') as f:
+ yaml.dump(hyp, f, sort_keys=False)
+ with open(save_dir / 'opt.yaml', 'w') as f:
+ yaml.dump(vars(opt), f, sort_keys=False)
+
+ # Configure
+ plots = not opt.evolve # create plots
+ cuda = device.type != 'cpu'
+ init_seeds(2 + rank)
+ with open(opt.data) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ is_coco = opt.data.endswith('coco.yaml')
+
+ # Logging- Doing this before checking the dataset. Might update data_dict
+ loggers = {'wandb': None} # loggers dict
+ if rank in [-1, 0]:
+ opt.hyp = hyp # add hyperparameters
+ run_id = torch.load(weights, map_location=device).get('wandb_id') if weights.endswith('.pt') and os.path.isfile(weights) else None
+ wandb_logger = WandbLogger(opt, Path(opt.save_dir).stem, run_id, data_dict)
+ loggers['wandb'] = wandb_logger.wandb
+ data_dict = wandb_logger.data_dict
+ if wandb_logger.wandb:
+ weights, epochs, hyp = opt.weights, opt.epochs, opt.hyp # WandbLogger might update weights, epochs if resuming
+
+ nc = 1 if opt.single_cls else int(data_dict['nc']) # number of classes
+ names = ['item'] if opt.single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
+ assert len(names) == nc, '%g names found for nc=%g dataset in %s' % (len(names), nc, opt.data) # check
+
+ # Model
+ pretrained = weights.endswith('.pt')
+ if pretrained:
+ with torch_distributed_zero_first(rank):
+ attempt_download(weights) # download if not found locally
+ ckpt = torch.load(weights, map_location=device) # load checkpoint
+ model = Model(opt.cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ exclude = ['anchor'] if (opt.cfg or hyp.get('anchors')) and not opt.resume else [] # exclude keys
+ state_dict = ckpt['model'].float().state_dict() # to FP32
+ state_dict = intersect_dicts(state_dict, model.state_dict(), exclude=exclude) # intersect
+ model.load_state_dict(state_dict, strict=False) # load
+ logger.info('Transferred %g/%g items from %s' % (len(state_dict), len(model.state_dict()), weights)) # report
+ else:
+ model = Model(opt.cfg, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ with torch_distributed_zero_first(rank):
+ check_dataset(data_dict) # check
+ train_path = data_dict['train']
+ test_path = data_dict['val']
+
+ # Freeze
+ freeze = [f'model.{x}.' for x in (freeze if len(freeze) > 1 else range(freeze[0]))] # parameter names to freeze (full or partial)
+ for k, v in model.named_parameters():
+ v.requires_grad = True # train all layers
+ if any(x in k for x in freeze):
+ print('freezing %s' % k)
+ v.requires_grad = False
+
+ # Optimizer
+ nbs = 64 # nominal batch size
+ accumulate = max(round(nbs / total_batch_size), 1) # accumulate loss before optimizing
+ hyp['weight_decay'] *= total_batch_size * accumulate / nbs # scale weight_decay
+ logger.info(f"Scaled weight_decay = {hyp['weight_decay']}")
+
+ pg0, pg1, pg2 = [], [], [] # optimizer parameter groups
+ for k, v in model.named_modules():
+ if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter):
+ pg2.append(v.bias) # biases
+ if isinstance(v, nn.BatchNorm2d):
+ pg0.append(v.weight) # no decay
+ elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter):
+ pg1.append(v.weight) # apply decay
+ if hasattr(v, 'im'):
+ if hasattr(v.im, 'implicit'):
+ pg0.append(v.im.implicit)
+ else:
+ for iv in v.im:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'imc'):
+ if hasattr(v.imc, 'implicit'):
+ pg0.append(v.imc.implicit)
+ else:
+ for iv in v.imc:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'imb'):
+ if hasattr(v.imb, 'implicit'):
+ pg0.append(v.imb.implicit)
+ else:
+ for iv in v.imb:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'imo'):
+ if hasattr(v.imo, 'implicit'):
+ pg0.append(v.imo.implicit)
+ else:
+ for iv in v.imo:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'ia'):
+ if hasattr(v.ia, 'implicit'):
+ pg0.append(v.ia.implicit)
+ else:
+ for iv in v.ia:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'attn'):
+ if hasattr(v.attn, 'logit_scale'):
+ pg0.append(v.attn.logit_scale)
+ if hasattr(v.attn, 'q_bias'):
+ pg0.append(v.attn.q_bias)
+ if hasattr(v.attn, 'v_bias'):
+ pg0.append(v.attn.v_bias)
+ if hasattr(v.attn, 'relative_position_bias_table'):
+ pg0.append(v.attn.relative_position_bias_table)
+ if hasattr(v, 'rbr_dense'):
+ if hasattr(v.rbr_dense, 'weight_rbr_origin'):
+ pg0.append(v.rbr_dense.weight_rbr_origin)
+ if hasattr(v.rbr_dense, 'weight_rbr_avg_conv'):
+ pg0.append(v.rbr_dense.weight_rbr_avg_conv)
+ if hasattr(v.rbr_dense, 'weight_rbr_pfir_conv'):
+ pg0.append(v.rbr_dense.weight_rbr_pfir_conv)
+ if hasattr(v.rbr_dense, 'weight_rbr_1x1_kxk_idconv1'):
+ pg0.append(v.rbr_dense.weight_rbr_1x1_kxk_idconv1)
+ if hasattr(v.rbr_dense, 'weight_rbr_1x1_kxk_conv2'):
+ pg0.append(v.rbr_dense.weight_rbr_1x1_kxk_conv2)
+ if hasattr(v.rbr_dense, 'weight_rbr_gconv_dw'):
+ pg0.append(v.rbr_dense.weight_rbr_gconv_dw)
+ if hasattr(v.rbr_dense, 'weight_rbr_gconv_pw'):
+ pg0.append(v.rbr_dense.weight_rbr_gconv_pw)
+ if hasattr(v.rbr_dense, 'vector'):
+ pg0.append(v.rbr_dense.vector)
+
+ if opt.adam:
+ optimizer = optim.Adam(pg0, lr=hyp['lr0'], betas=(hyp['momentum'], 0.999)) # adjust beta1 to momentum
+ else:
+ optimizer = optim.SGD(pg0, lr=hyp['lr0'], momentum=hyp['momentum'], nesterov=True)
+
+ optimizer.add_param_group({'params': pg1, 'weight_decay': hyp['weight_decay']}) # add pg1 with weight_decay
+ optimizer.add_param_group({'params': pg2}) # add pg2 (biases)
+ logger.info('Optimizer groups: %g .bias, %g conv.weight, %g other' % (len(pg2), len(pg1), len(pg0)))
+ del pg0, pg1, pg2
+
+ # Scheduler https://arxiv.org/pdf/1812.01187.pdf
+ # https://pytorch.org/docs/stable/_modules/torch/optim/lr_scheduler.html#OneCycleLR
+ if opt.linear_lr:
+ lf = lambda x: (1 - x / (epochs - 1)) * (1.0 - hyp['lrf']) + hyp['lrf'] # linear
+ else:
+ lf = one_cycle(1, hyp['lrf'], epochs) # cosine 1->hyp['lrf']
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
+ # plot_lr_scheduler(optimizer, scheduler, epochs)
+
+ # EMA
+ ema = ModelEMA(model) if rank in [-1, 0] else None
+
+ # Resume
+ start_epoch, best_fitness = 0, 0.0
+ if pretrained:
+ # Optimizer
+ if ckpt['optimizer'] is not None:
+ optimizer.load_state_dict(ckpt['optimizer'])
+ best_fitness = ckpt['best_fitness']
+
+ # EMA
+ if ema and ckpt.get('ema'):
+ ema.ema.load_state_dict(ckpt['ema'].float().state_dict())
+ ema.updates = ckpt['updates']
+
+ # Results
+ if ckpt.get('training_results') is not None:
+ results_file.write_text(ckpt['training_results']) # write results.txt
+
+ # Epochs
+ start_epoch = ckpt['epoch'] + 1
+ if opt.resume:
+ assert start_epoch > 0, '%s training to %g epochs is finished, nothing to resume.' % (weights, epochs)
+ if epochs < start_epoch:
+ logger.info('%s has been trained for %g epochs. Fine-tuning for %g additional epochs.' %
+ (weights, ckpt['epoch'], epochs))
+ epochs += ckpt['epoch'] # finetune additional epochs
+
+ del ckpt, state_dict
+
+ # Image sizes
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ nl = model.model[-1].nl # number of detection layers (used for scaling hyp['obj'])
+ imgsz, imgsz_test = [check_img_size(x, gs) for x in opt.img_size] # verify imgsz are gs-multiples
+
+ # DP mode
+ if cuda and rank == -1 and torch.cuda.device_count() > 1:
+ model = torch.nn.DataParallel(model)
+
+ # SyncBatchNorm
+ if opt.sync_bn and cuda and rank != -1:
+ model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
+ logger.info('Using SyncBatchNorm()')
+
+ # Trainloader
+ dataloader, dataset = create_dataloader(train_path, imgsz, batch_size, gs, opt,
+ hyp=hyp, augment=True, cache=opt.cache_images, rect=opt.rect, rank=rank,
+ world_size=opt.world_size, workers=opt.workers,
+ image_weights=opt.image_weights, quad=opt.quad, prefix=colorstr('train: '))
+ mlc = np.concatenate(dataset.labels, 0)[:, 0].max() # max label class
+ nb = len(dataloader) # number of batches
+ assert mlc < nc, 'Label class %g exceeds nc=%g in %s. Possible class labels are 0-%g' % (mlc, nc, opt.data, nc - 1)
+
+ # Process 0
+ if rank in [-1, 0]:
+ testloader = create_dataloader(test_path, imgsz_test, batch_size * 2, gs, opt, # testloader
+ hyp=hyp, cache=opt.cache_images and not opt.notest, rect=True, rank=-1,
+ world_size=opt.world_size, workers=opt.workers,
+ pad=0.5, prefix=colorstr('val: '))[0]
+
+ if not opt.resume:
+ labels = np.concatenate(dataset.labels, 0)
+ c = torch.tensor(labels[:, 0]) # classes
+ # cf = torch.bincount(c.long(), minlength=nc) + 1. # frequency
+ # model._initialize_biases(cf.to(device))
+ if plots:
+ #plot_labels(labels, names, save_dir, loggers)
+ if tb_writer:
+ tb_writer.add_histogram('classes', c, 0)
+
+ # Anchors
+ if not opt.noautoanchor:
+ check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz)
+ model.half().float() # pre-reduce anchor precision
+
+ # DDP mode
+ if cuda and rank != -1:
+ model = DDP(model, device_ids=[opt.local_rank], output_device=opt.local_rank,
+ # nn.MultiheadAttention incompatibility with DDP https://github.com/pytorch/pytorch/issues/26698
+ find_unused_parameters=any(isinstance(layer, nn.MultiheadAttention) for layer in model.modules()))
+
+ # Model parameters
+ hyp['box'] *= 3. / nl # scale to layers
+ hyp['cls'] *= nc / 80. * 3. / nl # scale to classes and layers
+ hyp['obj'] *= (imgsz / 640) ** 2 * 3. / nl # scale to image size and layers
+ hyp['label_smoothing'] = opt.label_smoothing
+ model.nc = nc # attach number of classes to model
+ model.hyp = hyp # attach hyperparameters to model
+ model.gr = 1.0 # iou loss ratio (obj_loss = 1.0 or iou)
+ model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
+ model.names = names
+
+ # Start training
+ t0 = time.time()
+ nw = max(round(hyp['warmup_epochs'] * nb), 1000) # number of warmup iterations, max(3 epochs, 1k iterations)
+ # nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
+ maps = np.zeros(nc) # mAP per class
+ results = (0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
+ scheduler.last_epoch = start_epoch - 1 # do not move
+ scaler = amp.GradScaler(enabled=cuda)
+ compute_loss_ota = ComputeLossOTA(model) # init loss class
+ compute_loss = ComputeLoss(model) # init loss class
+ logger.info(f'Image sizes {imgsz} train, {imgsz_test} test\n'
+ f'Using {dataloader.num_workers} dataloader workers\n'
+ f'Logging results to {save_dir}\n'
+ f'Starting training for {epochs} epochs...')
+ torch.save(model, wdir / 'init.pt')
+ for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
+ model, optimizer = ipex.optimize(model, optimizer=optimizer)
+ model.train()
+
+ # Update image weights (optional)
+ if opt.image_weights:
+ # Generate indices
+ if rank in [-1, 0]:
+ cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
+ iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
+ dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
+ # Broadcast if DDP
+ if rank != -1:
+ indices = (torch.tensor(dataset.indices) if rank == 0 else torch.zeros(dataset.n)).int()
+ dist.broadcast(indices, 0)
+ if rank != 0:
+ dataset.indices = indices.cpu().numpy()
+
+ # Update mosaic border
+ # b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
+ # dataset.mosaic_border = [b - imgsz, -b] # height, width borders
+
+ mloss = torch.zeros(4, device=device) # mean losses
+ if rank != -1:
+ dataloader.sampler.set_epoch(epoch)
+ pbar = enumerate(dataloader)
+ logger.info(('\n' + '%10s' * 8) % ('Epoch', 'gpu_mem', 'box', 'obj', 'cls', 'total', 'labels', 'img_size'))
+ if rank in [-1, 0]:
+ pbar = tqdm(pbar, total=nb) # progress bar
+ optimizer.zero_grad()
+ for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
+ ni = i + nb * epoch # number integrated batches (since train start)
+ imgs = imgs.to(device, non_blocking=True).float() / 255.0 # uint8 to float32, 0-255 to 0.0-1.0
+
+ # Warmup
+ if ni <= nw:
+ xi = [0, nw] # x interp
+ # model.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
+ accumulate = max(1, np.interp(ni, xi, [1, nbs / total_batch_size]).round())
+ for j, x in enumerate(optimizer.param_groups):
+ # bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
+ x['lr'] = np.interp(ni, xi, [hyp['warmup_bias_lr'] if j == 2 else 0.0, x['initial_lr'] * lf(epoch)])
+ if 'momentum' in x:
+ x['momentum'] = np.interp(ni, xi, [hyp['warmup_momentum'], hyp['momentum']])
+
+ # Multi-scale
+ if opt.multi_scale:
+ sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
+ sf = sz / max(imgs.shape[2:]) # scale factor
+ if sf != 1:
+ ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
+ imgs = F.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)
+
+ # Forward
+ with amp.autocast(enabled=cuda):
+ pred = model(imgs) # forward
+ if 'loss_ota' not in hyp or hyp['loss_ota'] == 1:
+ loss, loss_items = compute_loss_ota(pred, targets.to(device), imgs) # loss scaled by batch_size
+ else:
+ loss, loss_items = compute_loss(pred, targets.to(device)) # loss scaled by batch_size
+ if rank != -1:
+ loss *= opt.world_size # gradient averaged between devices in DDP mode
+ if opt.quad:
+ loss *= 4.
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize
+ if ni % accumulate == 0:
+ scaler.step(optimizer) # optimizer.step
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+
+ # Print
+ if rank in [-1, 0]:
+ mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
+ mem = '%.3gG' % (torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0) # (GB)
+ s = ('%10s' * 2 + '%10.4g' * 6) % (
+ '%g/%g' % (epoch, epochs - 1), mem, *mloss, targets.shape[0], imgs.shape[-1])
+ pbar.set_description(s)
+
+ # Plot
+ if plots and ni < 10:
+ f = save_dir / f'train_batch{ni}.jpg' # filename
+ Thread(target=plot_images, args=(imgs, targets, paths, f), daemon=True).start()
+ # if tb_writer:
+ # tb_writer.add_image(f, result, dataformats='HWC', global_step=epoch)
+ # tb_writer.add_graph(torch.jit.trace(model, imgs, strict=False), []) # add model graph
+ elif plots and ni == 10 and wandb_logger.wandb:
+ wandb_logger.log({"Mosaics": [wandb_logger.wandb.Image(str(x), caption=x.name) for x in
+ save_dir.glob('train*.jpg') if x.exists()]})
+
+ # end batch ------------------------------------------------------------------------------------------------
+ # end epoch ----------------------------------------------------------------------------------------------------
+
+ # Scheduler
+ lr = [x['lr'] for x in optimizer.param_groups] # for tensorboard
+ scheduler.step()
+
+ # DDP process 0 or single-GPU
+ if rank in [-1, 0]:
+ # mAP
+ ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'gr', 'names', 'stride', 'class_weights'])
+ final_epoch = epoch + 1 == epochs
+ if not opt.notest or final_epoch: # Calculate mAP
+ wandb_logger.current_epoch = epoch + 1
+ results, maps, times = test.test(data_dict,
+ batch_size=batch_size * 2,
+ imgsz=imgsz_test,
+ model=ema.ema,
+ single_cls=opt.single_cls,
+ dataloader=testloader,
+ save_dir=save_dir,
+ verbose=nc < 50 and final_epoch,
+ plots=plots and final_epoch,
+ wandb_logger=wandb_logger,
+ compute_loss=compute_loss,
+ is_coco=is_coco,
+ v5_metric=opt.v5_metric)
+
+ # Write
+ with open(results_file, 'a') as f:
+ f.write(s + '%10.4g' * 7 % results + '\n') # append metrics, val_loss
+ if len(opt.name) and opt.bucket:
+ os.system('gsutil cp %s gs://%s/results/results%s.txt' % (results_file, opt.bucket, opt.name))
+
+ # Log
+ tags = ['train/box_loss', 'train/obj_loss', 'train/cls_loss', # train loss
+ 'metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/mAP_0.5:0.95',
+ 'val/box_loss', 'val/obj_loss', 'val/cls_loss', # val loss
+ 'x/lr0', 'x/lr1', 'x/lr2'] # params
+ for x, tag in zip(list(mloss[:-1]) + list(results) + lr, tags):
+ if tb_writer:
+ tb_writer.add_scalar(tag, x, epoch) # tensorboard
+ if wandb_logger.wandb:
+ wandb_logger.log({tag: x}) # W&B
+
+ # Update best mAP
+ fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
+ if fi > best_fitness:
+ best_fitness = fi
+ wandb_logger.end_epoch(best_result=best_fitness == fi)
+
+ # Save model
+ if (not opt.nosave) or (final_epoch and not opt.evolve): # if save
+ ckpt = {'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'training_results': results_file.read_text(),
+ 'model': deepcopy(model.module if is_parallel(model) else model).half(),
+ 'ema': deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': optimizer.state_dict(),
+ 'wandb_id': wandb_logger.wandb_run.id if wandb_logger.wandb else None}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fi:
+ torch.save(ckpt, best)
+ if (best_fitness == fi) and (epoch >= 200):
+ torch.save(ckpt, wdir / 'best_{:03d}.pt'.format(epoch))
+ if epoch == 0:
+ torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
+ elif ((epoch+1) % 25) == 0:
+ torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
+ elif epoch >= (epochs-5):
+ torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
+ if wandb_logger.wandb:
+ if ((epoch + 1) % opt.save_period == 0 and not final_epoch) and opt.save_period != -1:
+ wandb_logger.log_model(
+ last.parent, opt, epoch, fi, best_model=best_fitness == fi)
+ del ckpt
+
+ # end epoch ----------------------------------------------------------------------------------------------------
+ # end training
+ if rank in [-1, 0]:
+ # Plots
+ if plots:
+ plot_results(save_dir=save_dir) # save as results.png
+ if wandb_logger.wandb:
+ files = ['results.png', 'confusion_matrix.png', *[f'{x}_curve.png' for x in ('F1', 'PR', 'P', 'R')]]
+ wandb_logger.log({"Results": [wandb_logger.wandb.Image(str(save_dir / f), caption=f) for f in files
+ if (save_dir / f).exists()]})
+ # Test best.pt
+ logger.info('%g epochs completed in %.3f hours.\n' % (epoch - start_epoch + 1, (time.time() - t0) / 3600))
+ if opt.data.endswith('coco.yaml') and nc == 80: # if COCO
+ for m in (last, best) if best.exists() else (last): # speed, mAP tests
+ results, _, _ = test.test(opt.data,
+ batch_size=batch_size * 2,
+ imgsz=imgsz_test,
+ conf_thres=0.001,
+ iou_thres=0.7,
+ model=attempt_load(m, device).half(),
+ single_cls=opt.single_cls,
+ dataloader=testloader,
+ save_dir=save_dir,
+ save_json=True,
+ plots=False,
+ is_coco=is_coco,
+ v5_metric=opt.v5_metric)
+
+ # Strip optimizers
+ final = best if best.exists() else last # final model
+ for f in last, best:
+ if f.exists():
+ strip_optimizer(f) # strip optimizers
+ if opt.bucket:
+ os.system(f'gsutil cp {final} gs://{opt.bucket}/weights') # upload
+ if wandb_logger.wandb and not opt.evolve: # Log the stripped model
+ wandb_logger.wandb.log_artifact(str(final), type='model',
+ name='run_' + wandb_logger.wandb_run.id + '_model',
+ aliases=['last', 'best', 'stripped'])
+ wandb_logger.finish_run()
+ else:
+ dist.destroy_process_group()
+ torch.cuda.empty_cache()
+ return results
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default='yolo7.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default='data/coco.yaml', help='data.yaml path')
+ parser.add_argument('--hyp', type=str, default='data/hyp.scratch.p5.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300)
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs')
+ parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='[train, test] image sizes')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--notest', action='store_true', help='only test final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
+ parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--adam', action='store_true', help='use torch.optim.Adam() optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')
+ parser.add_argument('--workers', type=int, default=8, help='maximum number of dataloader workers')
+ parser.add_argument('--project', default='runs/train', help='save to project/name')
+ parser.add_argument('--entity', default=None, help='W&B entity')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--linear-lr', action='store_true', help='linear LR')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--upload_dataset', action='store_true', help='Upload dataset as W&B artifact table')
+ parser.add_argument('--bbox_interval', type=int, default=-1, help='Set bounding-box image logging interval for W&B')
+ parser.add_argument('--save_period', type=int, default=-1, help='Log model after every "save_period" epoch')
+ parser.add_argument('--artifact_alias', type=str, default="latest", help='version of dataset artifact to be used')
+ parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone of yolov7=50, first3=0 1 2')
+ parser.add_argument('--v5-metric', action='store_true', help='assume maximum recall as 1.0 in AP calculation')
+ opt = parser.parse_args()
+
+ # Set DDP variables
+ opt.world_size = int(os.environ['WORLD_SIZE']) if 'WORLD_SIZE' in os.environ else 1
+ opt.global_rank = int(os.environ['RANK']) if 'RANK' in os.environ else -1
+ set_logging(opt.global_rank)
+ #if opt.global_rank in [-1, 0]:
+ # check_git_status()
+ # check_requirements()
+
+ # Resume
+ wandb_run = check_wandb_resume(opt)
+ if opt.resume and not wandb_run: # resume an interrupted run
+ ckpt = opt.resume if isinstance(opt.resume, str) else get_latest_run() # specified or most recent path
+ assert os.path.isfile(ckpt), 'ERROR: --resume checkpoint does not exist'
+ apriori = opt.global_rank, opt.local_rank
+ with open(Path(ckpt).parent.parent / 'opt.yaml') as f:
+ opt = argparse.Namespace(**yaml.load(f, Loader=yaml.SafeLoader)) # replace
+ opt.cfg, opt.weights, opt.resume, opt.batch_size, opt.global_rank, opt.local_rank = '', ckpt, True, opt.total_batch_size, *apriori # reinstate
+ logger.info('Resuming training from %s' % ckpt)
+ else:
+ # opt.hyp = opt.hyp or ('hyp.finetune.yaml' if opt.weights else 'hyp.scratch.yaml')
+ opt.data, opt.cfg, opt.hyp = check_file(opt.data), check_file(opt.cfg), check_file(opt.hyp) # check files
+ assert len(opt.cfg) or len(opt.weights), 'either --cfg or --weights must be specified'
+ opt.img_size.extend([opt.img_size[-1]] * (2 - len(opt.img_size))) # extend to 2 sizes (train, test)
+ opt.name = 'evolve' if opt.evolve else opt.name
+ opt.save_dir = increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok | opt.evolve) # increment run
+
+ # DDP mode
+ opt.total_batch_size = opt.batch_size
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if opt.local_rank != -1:
+ assert torch.cuda.device_count() > opt.local_rank
+ torch.cuda.set_device(opt.local_rank)
+ device = torch.device('cuda', opt.local_rank)
+ dist.init_process_group(backend='nccl', init_method='env://') # distributed backend
+ assert opt.batch_size % opt.world_size == 0, '--batch-size must be multiple of CUDA device count'
+ opt.batch_size = opt.total_batch_size // opt.world_size
+
+ # Hyperparameters
+ with open(opt.hyp) as f:
+ hyp = yaml.load(f, Loader=yaml.SafeLoader) # load hyps
+
+ # Train
+ logger.info(opt)
+ if not opt.evolve:
+ tb_writer = None # init loggers
+ if opt.global_rank in [-1, 0]:
+ prefix = colorstr('tensorboard: ')
+ logger.info(f"{prefix}Start with 'tensorboard --logdir {opt.project}', view at http://localhost:6006/")
+ tb_writer = SummaryWriter(opt.save_dir) # Tensorboard
+ train(hyp, opt, device, tb_writer)
+
+ # Evolve hyperparameters (optional)
+ else:
+ # Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)
+ meta = {'lr0': (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
+ 'lrf': (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
+ 'momentum': (0.3, 0.6, 0.98), # SGD momentum/Adam beta1
+ 'weight_decay': (1, 0.0, 0.001), # optimizer weight decay
+ 'warmup_epochs': (1, 0.0, 5.0), # warmup epochs (fractions ok)
+ 'warmup_momentum': (1, 0.0, 0.95), # warmup initial momentum
+ 'warmup_bias_lr': (1, 0.0, 0.2), # warmup initial bias lr
+ 'box': (1, 0.02, 0.2), # box loss gain
+ 'cls': (1, 0.2, 4.0), # cls loss gain
+ 'cls_pw': (1, 0.5, 2.0), # cls BCELoss positive_weight
+ 'obj': (1, 0.2, 4.0), # obj loss gain (scale with pixels)
+ 'obj_pw': (1, 0.5, 2.0), # obj BCELoss positive_weight
+ 'iou_t': (0, 0.1, 0.7), # IoU training threshold
+ 'anchor_t': (1, 2.0, 8.0), # anchor-multiple threshold
+ 'anchors': (2, 2.0, 10.0), # anchors per output grid (0 to ignore)
+ 'fl_gamma': (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
+ 'hsv_h': (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
+ 'hsv_s': (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
+ 'hsv_v': (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)
+ 'degrees': (1, 0.0, 45.0), # image rotation (+/- deg)
+ 'translate': (1, 0.0, 0.9), # image translation (+/- fraction)
+ 'scale': (1, 0.0, 0.9), # image scale (+/- gain)
+ 'shear': (1, 0.0, 10.0), # image shear (+/- deg)
+ 'perspective': (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
+ 'flipud': (1, 0.0, 1.0), # image flip up-down (probability)
+ 'fliplr': (0, 0.0, 1.0), # image flip left-right (probability)
+ 'mosaic': (1, 0.0, 1.0), # image mixup (probability)
+ 'mixup': (1, 0.0, 1.0), # image mixup (probability)
+ 'copy_paste': (1, 0.0, 1.0), # segment copy-paste (probability)
+ 'paste_in': (1, 0.0, 1.0)} # segment copy-paste (probability)
+
+ with open(opt.hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ if 'anchors' not in hyp: # anchors commented in hyp.yaml
+ hyp['anchors'] = 3
+
+ assert opt.local_rank == -1, 'DDP mode not implemented for --evolve'
+ opt.notest, opt.nosave = True, True # only test/save final epoch
+ # ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
+ yaml_file = Path(opt.save_dir) / 'hyp_evolved.yaml' # save best result here
+ if opt.bucket:
+ os.system('gsutil cp gs://%s/evolve.txt .' % opt.bucket) # download evolve.txt if exists
+
+ for _ in range(300): # generations to evolve
+ if Path('evolve.txt').exists(): # if evolve.txt exists: select best hyps and mutate
+ # Select parent(s)
+ parent = 'single' # parent selection method: 'single' or 'weighted'
+ x = np.loadtxt('evolve.txt', ndmin=2)
+ n = min(5, len(x)) # number of previous results to consider
+ x = x[np.argsort(-fitness(x))][:n] # top n mutations
+ w = fitness(x) - fitness(x).min() # weights
+ if parent == 'single' or len(x) == 1:
+ # x = x[random.randint(0, n - 1)] # random selection
+ x = x[random.choices(range(n), weights=w)[0]] # weighted selection
+ elif parent == 'weighted':
+ x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
+
+ # Mutate
+ mp, s = 0.8, 0.2 # mutation probability, sigma
+ npr = np.random
+ npr.seed(int(time.time()))
+ g = np.array([x[0] for x in meta.values()]) # gains 0-1
+ ng = len(meta)
+ v = np.ones(ng)
+ while all(v == 1): # mutate until a change occurs (prevent duplicates)
+ v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
+ for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
+ hyp[k] = float(x[i + 7] * v[i]) # mutate
+
+ # Constrain to limits
+ for k, v in meta.items():
+ hyp[k] = max(hyp[k], v[1]) # lower limit
+ hyp[k] = min(hyp[k], v[2]) # upper limit
+ hyp[k] = round(hyp[k], 5) # significant digits
+
+ # Train mutation
+ results = train(hyp.copy(), opt, device)
+
+ # Write mutation results
+ print_mutation(hyp.copy(), results, yaml_file, opt.bucket)
+
+ # Plot results
+ plot_evolution(yaml_file)
+ print(f'Hyperparameter evolution complete. Best results saved as: {yaml_file}\n'
+ f'Command to train a new model with these hyperparameters: $ python train.py --hyp {yaml_file}')
diff --git a/ipex/train_aux.py b/ipex/train_aux.py
new file mode 100644
index 000000000..0e8053f85
--- /dev/null
+++ b/ipex/train_aux.py
@@ -0,0 +1,699 @@
+import argparse
+import logging
+import math
+import os
+import random
+import time
+from copy import deepcopy
+from pathlib import Path
+from threading import Thread
+
+import numpy as np
+import torch.distributed as dist
+import torch.nn as nn
+import torch.nn.functional as F
+import torch.optim as optim
+import torch.optim.lr_scheduler as lr_scheduler
+import torch.utils.data
+import yaml
+from torch.cuda import amp
+from torch.nn.parallel import DistributedDataParallel as DDP
+from torch.utils.tensorboard import SummaryWriter
+from tqdm import tqdm
+
+import test # import test.py to get mAP after each epoch
+from models.experimental import attempt_load
+from models.yolo import Model
+from utils.autoanchor import check_anchors
+from utils.datasets import create_dataloader
+from utils.general import labels_to_class_weights, increment_path, labels_to_image_weights, init_seeds, \
+ fitness, strip_optimizer, get_latest_run, check_dataset, check_file, check_git_status, check_img_size, \
+ check_requirements, print_mutation, set_logging, one_cycle, colorstr
+from utils.google_utils import attempt_download
+from utils.loss import ComputeLoss, ComputeLossAuxOTA
+from utils.plots import plot_images, plot_labels, plot_results, plot_evolution
+from utils.torch_utils import ModelEMA, select_device, intersect_dicts, torch_distributed_zero_first, is_parallel
+from utils.wandb_logging.wandb_utils import WandbLogger, check_wandb_resume
+
+logger = logging.getLogger(__name__)
+
+
+def train(hyp, opt, device, tb_writer=None):
+ logger.info(colorstr('hyperparameters: ') + ', '.join(f'{k}={v}' for k, v in hyp.items()))
+ save_dir, epochs, batch_size, total_batch_size, weights, rank = \
+ Path(opt.save_dir), opt.epochs, opt.batch_size, opt.total_batch_size, opt.weights, opt.global_rank
+
+ # Directories
+ wdir = save_dir / 'weights'
+ wdir.mkdir(parents=True, exist_ok=True) # make dir
+ last = wdir / 'last.pt'
+ best = wdir / 'best.pt'
+ results_file = save_dir / 'results.txt'
+
+ # Save run settings
+ with open(save_dir / 'hyp.yaml', 'w') as f:
+ yaml.dump(hyp, f, sort_keys=False)
+ with open(save_dir / 'opt.yaml', 'w') as f:
+ yaml.dump(vars(opt), f, sort_keys=False)
+
+ # Configure
+ plots = not opt.evolve # create plots
+ cuda = device.type != 'cpu'
+ init_seeds(2 + rank)
+ with open(opt.data) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ is_coco = opt.data.endswith('coco.yaml')
+
+ # Logging- Doing this before checking the dataset. Might update data_dict
+ loggers = {'wandb': None} # loggers dict
+ if rank in [-1, 0]:
+ opt.hyp = hyp # add hyperparameters
+ run_id = torch.load(weights).get('wandb_id') if weights.endswith('.pt') and os.path.isfile(weights) else None
+ wandb_logger = WandbLogger(opt, Path(opt.save_dir).stem, run_id, data_dict)
+ loggers['wandb'] = wandb_logger.wandb
+ data_dict = wandb_logger.data_dict
+ if wandb_logger.wandb:
+ weights, epochs, hyp = opt.weights, opt.epochs, opt.hyp # WandbLogger might update weights, epochs if resuming
+
+ nc = 1 if opt.single_cls else int(data_dict['nc']) # number of classes
+ names = ['item'] if opt.single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
+ assert len(names) == nc, '%g names found for nc=%g dataset in %s' % (len(names), nc, opt.data) # check
+
+ # Model
+ pretrained = weights.endswith('.pt')
+ if pretrained:
+ with torch_distributed_zero_first(rank):
+ attempt_download(weights) # download if not found locally
+ ckpt = torch.load(weights, map_location=device) # load checkpoint
+ model = Model(opt.cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ exclude = ['anchor'] if (opt.cfg or hyp.get('anchors')) and not opt.resume else [] # exclude keys
+ state_dict = ckpt['model'].float().state_dict() # to FP32
+ state_dict = intersect_dicts(state_dict, model.state_dict(), exclude=exclude) # intersect
+ model.load_state_dict(state_dict, strict=False) # load
+ logger.info('Transferred %g/%g items from %s' % (len(state_dict), len(model.state_dict()), weights)) # report
+ else:
+ model = Model(opt.cfg, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ with torch_distributed_zero_first(rank):
+ check_dataset(data_dict) # check
+ train_path = data_dict['train']
+ test_path = data_dict['val']
+
+ # Freeze
+ freeze = [] # parameter names to freeze (full or partial)
+ for k, v in model.named_parameters():
+ v.requires_grad = True # train all layers
+ if any(x in k for x in freeze):
+ print('freezing %s' % k)
+ v.requires_grad = False
+
+ # Optimizer
+ nbs = 64 # nominal batch size
+ accumulate = max(round(nbs / total_batch_size), 1) # accumulate loss before optimizing
+ hyp['weight_decay'] *= total_batch_size * accumulate / nbs # scale weight_decay
+ logger.info(f"Scaled weight_decay = {hyp['weight_decay']}")
+
+ pg0, pg1, pg2 = [], [], [] # optimizer parameter groups
+ for k, v in model.named_modules():
+ if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter):
+ pg2.append(v.bias) # biases
+ if isinstance(v, nn.BatchNorm2d):
+ pg0.append(v.weight) # no decay
+ elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter):
+ pg1.append(v.weight) # apply decay
+ if hasattr(v, 'im'):
+ if hasattr(v.im, 'implicit'):
+ pg0.append(v.im.implicit)
+ else:
+ for iv in v.im:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'imc'):
+ if hasattr(v.imc, 'implicit'):
+ pg0.append(v.imc.implicit)
+ else:
+ for iv in v.imc:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'imb'):
+ if hasattr(v.imb, 'implicit'):
+ pg0.append(v.imb.implicit)
+ else:
+ for iv in v.imb:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'imo'):
+ if hasattr(v.imo, 'implicit'):
+ pg0.append(v.imo.implicit)
+ else:
+ for iv in v.imo:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'ia'):
+ if hasattr(v.ia, 'implicit'):
+ pg0.append(v.ia.implicit)
+ else:
+ for iv in v.ia:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'attn'):
+ if hasattr(v.attn, 'logit_scale'):
+ pg0.append(v.attn.logit_scale)
+ if hasattr(v.attn, 'q_bias'):
+ pg0.append(v.attn.q_bias)
+ if hasattr(v.attn, 'v_bias'):
+ pg0.append(v.attn.v_bias)
+ if hasattr(v.attn, 'relative_position_bias_table'):
+ pg0.append(v.attn.relative_position_bias_table)
+ if hasattr(v, 'rbr_dense'):
+ if hasattr(v.rbr_dense, 'weight_rbr_origin'):
+ pg0.append(v.rbr_dense.weight_rbr_origin)
+ if hasattr(v.rbr_dense, 'weight_rbr_avg_conv'):
+ pg0.append(v.rbr_dense.weight_rbr_avg_conv)
+ if hasattr(v.rbr_dense, 'weight_rbr_pfir_conv'):
+ pg0.append(v.rbr_dense.weight_rbr_pfir_conv)
+ if hasattr(v.rbr_dense, 'weight_rbr_1x1_kxk_idconv1'):
+ pg0.append(v.rbr_dense.weight_rbr_1x1_kxk_idconv1)
+ if hasattr(v.rbr_dense, 'weight_rbr_1x1_kxk_conv2'):
+ pg0.append(v.rbr_dense.weight_rbr_1x1_kxk_conv2)
+ if hasattr(v.rbr_dense, 'weight_rbr_gconv_dw'):
+ pg0.append(v.rbr_dense.weight_rbr_gconv_dw)
+ if hasattr(v.rbr_dense, 'weight_rbr_gconv_pw'):
+ pg0.append(v.rbr_dense.weight_rbr_gconv_pw)
+ if hasattr(v.rbr_dense, 'vector'):
+ pg0.append(v.rbr_dense.vector)
+
+ if opt.adam:
+ optimizer = optim.Adam(pg0, lr=hyp['lr0'], betas=(hyp['momentum'], 0.999)) # adjust beta1 to momentum
+ else:
+ optimizer = optim.SGD(pg0, lr=hyp['lr0'], momentum=hyp['momentum'], nesterov=True)
+
+ optimizer.add_param_group({'params': pg1, 'weight_decay': hyp['weight_decay']}) # add pg1 with weight_decay
+ optimizer.add_param_group({'params': pg2}) # add pg2 (biases)
+ logger.info('Optimizer groups: %g .bias, %g conv.weight, %g other' % (len(pg2), len(pg1), len(pg0)))
+ del pg0, pg1, pg2
+
+ # Scheduler https://arxiv.org/pdf/1812.01187.pdf
+ # https://pytorch.org/docs/stable/_modules/torch/optim/lr_scheduler.html#OneCycleLR
+ if opt.linear_lr:
+ lf = lambda x: (1 - x / (epochs - 1)) * (1.0 - hyp['lrf']) + hyp['lrf'] # linear
+ else:
+ lf = one_cycle(1, hyp['lrf'], epochs) # cosine 1->hyp['lrf']
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
+ # plot_lr_scheduler(optimizer, scheduler, epochs)
+
+ # EMA
+ ema = ModelEMA(model) if rank in [-1, 0] else None
+
+ # Resume
+ start_epoch, best_fitness = 0, 0.0
+ if pretrained:
+ # Optimizer
+ if ckpt['optimizer'] is not None:
+ optimizer.load_state_dict(ckpt['optimizer'])
+ best_fitness = ckpt['best_fitness']
+
+ # EMA
+ if ema and ckpt.get('ema'):
+ ema.ema.load_state_dict(ckpt['ema'].float().state_dict())
+ ema.updates = ckpt['updates']
+
+ # Results
+ if ckpt.get('training_results') is not None:
+ results_file.write_text(ckpt['training_results']) # write results.txt
+
+ # Epochs
+ start_epoch = ckpt['epoch'] + 1
+ if opt.resume:
+ assert start_epoch > 0, '%s training to %g epochs is finished, nothing to resume.' % (weights, epochs)
+ if epochs < start_epoch:
+ logger.info('%s has been trained for %g epochs. Fine-tuning for %g additional epochs.' %
+ (weights, ckpt['epoch'], epochs))
+ epochs += ckpt['epoch'] # finetune additional epochs
+
+ del ckpt, state_dict
+
+ # Image sizes
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ nl = model.model[-1].nl # number of detection layers (used for scaling hyp['obj'])
+ imgsz, imgsz_test = [check_img_size(x, gs) for x in opt.img_size] # verify imgsz are gs-multiples
+
+ # DP mode
+ if cuda and rank == -1 and torch.cuda.device_count() > 1:
+ model = torch.nn.DataParallel(model)
+
+ # SyncBatchNorm
+ if opt.sync_bn and cuda and rank != -1:
+ model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
+ logger.info('Using SyncBatchNorm()')
+
+ # Trainloader
+ dataloader, dataset = create_dataloader(train_path, imgsz, batch_size, gs, opt,
+ hyp=hyp, augment=True, cache=opt.cache_images, rect=opt.rect, rank=rank,
+ world_size=opt.world_size, workers=opt.workers,
+ image_weights=opt.image_weights, quad=opt.quad, prefix=colorstr('train: '))
+ mlc = np.concatenate(dataset.labels, 0)[:, 0].max() # max label class
+ nb = len(dataloader) # number of batches
+ assert mlc < nc, 'Label class %g exceeds nc=%g in %s. Possible class labels are 0-%g' % (mlc, nc, opt.data, nc - 1)
+
+ # Process 0
+ if rank in [-1, 0]:
+ testloader = create_dataloader(test_path, imgsz_test, batch_size * 2, gs, opt, # testloader
+ hyp=hyp, cache=opt.cache_images and not opt.notest, rect=True, rank=-1,
+ world_size=opt.world_size, workers=opt.workers,
+ pad=0.5, prefix=colorstr('val: '))[0]
+
+ if not opt.resume:
+ labels = np.concatenate(dataset.labels, 0)
+ c = torch.tensor(labels[:, 0]) # classes
+ # cf = torch.bincount(c.long(), minlength=nc) + 1. # frequency
+ # model._initialize_biases(cf.to(device))
+ if plots:
+ #plot_labels(labels, names, save_dir, loggers)
+ if tb_writer:
+ tb_writer.add_histogram('classes', c, 0)
+
+ # Anchors
+ if not opt.noautoanchor:
+ check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz)
+ model.half().float() # pre-reduce anchor precision
+
+ # DDP mode
+ if cuda and rank != -1:
+ model = DDP(model, device_ids=[opt.local_rank], output_device=opt.local_rank,
+ # nn.MultiheadAttention incompatibility with DDP https://github.com/pytorch/pytorch/issues/26698
+ find_unused_parameters=any(isinstance(layer, nn.MultiheadAttention) for layer in model.modules()))
+
+ # Model parameters
+ hyp['box'] *= 3. / nl # scale to layers
+ hyp['cls'] *= nc / 80. * 3. / nl # scale to classes and layers
+ hyp['obj'] *= (imgsz / 640) ** 2 * 3. / nl # scale to image size and layers
+ hyp['label_smoothing'] = opt.label_smoothing
+ model.nc = nc # attach number of classes to model
+ model.hyp = hyp # attach hyperparameters to model
+ model.gr = 1.0 # iou loss ratio (obj_loss = 1.0 or iou)
+ model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
+ model.names = names
+
+ # Start training
+ t0 = time.time()
+ nw = max(round(hyp['warmup_epochs'] * nb), 1000) # number of warmup iterations, max(3 epochs, 1k iterations)
+ # nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
+ maps = np.zeros(nc) # mAP per class
+ results = (0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
+ scheduler.last_epoch = start_epoch - 1 # do not move
+ scaler = amp.GradScaler(enabled=cuda)
+ compute_loss_ota = ComputeLossAuxOTA(model) # init loss class
+ compute_loss = ComputeLoss(model) # init loss class
+ logger.info(f'Image sizes {imgsz} train, {imgsz_test} test\n'
+ f'Using {dataloader.num_workers} dataloader workers\n'
+ f'Logging results to {save_dir}\n'
+ f'Starting training for {epochs} epochs...')
+ torch.save(model, wdir / 'init.pt')
+ for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
+ model.train()
+
+ # Update image weights (optional)
+ if opt.image_weights:
+ # Generate indices
+ if rank in [-1, 0]:
+ cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
+ iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
+ dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
+ # Broadcast if DDP
+ if rank != -1:
+ indices = (torch.tensor(dataset.indices) if rank == 0 else torch.zeros(dataset.n)).int()
+ dist.broadcast(indices, 0)
+ if rank != 0:
+ dataset.indices = indices.cpu().numpy()
+
+ # Update mosaic border
+ # b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
+ # dataset.mosaic_border = [b - imgsz, -b] # height, width borders
+
+ mloss = torch.zeros(4, device=device) # mean losses
+ if rank != -1:
+ dataloader.sampler.set_epoch(epoch)
+ pbar = enumerate(dataloader)
+ logger.info(('\n' + '%10s' * 8) % ('Epoch', 'gpu_mem', 'box', 'obj', 'cls', 'total', 'labels', 'img_size'))
+ if rank in [-1, 0]:
+ pbar = tqdm(pbar, total=nb) # progress bar
+ optimizer.zero_grad()
+ for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
+ ni = i + nb * epoch # number integrated batches (since train start)
+ imgs = imgs.to(device, non_blocking=True).float() / 255.0 # uint8 to float32, 0-255 to 0.0-1.0
+
+ # Warmup
+ if ni <= nw:
+ xi = [0, nw] # x interp
+ # model.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
+ accumulate = max(1, np.interp(ni, xi, [1, nbs / total_batch_size]).round())
+ for j, x in enumerate(optimizer.param_groups):
+ # bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
+ x['lr'] = np.interp(ni, xi, [hyp['warmup_bias_lr'] if j == 2 else 0.0, x['initial_lr'] * lf(epoch)])
+ if 'momentum' in x:
+ x['momentum'] = np.interp(ni, xi, [hyp['warmup_momentum'], hyp['momentum']])
+
+ # Multi-scale
+ if opt.multi_scale:
+ sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
+ sf = sz / max(imgs.shape[2:]) # scale factor
+ if sf != 1:
+ ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
+ imgs = F.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)
+
+ # Forward
+ with amp.autocast(enabled=cuda):
+ pred = model(imgs) # forward
+ loss, loss_items = compute_loss_ota(pred, targets.to(device), imgs) # loss scaled by batch_size
+ if rank != -1:
+ loss *= opt.world_size # gradient averaged between devices in DDP mode
+ if opt.quad:
+ loss *= 4.
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize
+ if ni % accumulate == 0:
+ scaler.step(optimizer) # optimizer.step
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+
+ # Print
+ if rank in [-1, 0]:
+ mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
+ mem = '%.3gG' % (torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0) # (GB)
+ s = ('%10s' * 2 + '%10.4g' * 6) % (
+ '%g/%g' % (epoch, epochs - 1), mem, *mloss, targets.shape[0], imgs.shape[-1])
+ pbar.set_description(s)
+
+ # Plot
+ if plots and ni < 10:
+ f = save_dir / f'train_batch{ni}.jpg' # filename
+ Thread(target=plot_images, args=(imgs, targets, paths, f), daemon=True).start()
+ # if tb_writer:
+ # tb_writer.add_image(f, result, dataformats='HWC', global_step=epoch)
+ # tb_writer.add_graph(torch.jit.trace(model, imgs, strict=False), []) # add model graph
+ elif plots and ni == 10 and wandb_logger.wandb:
+ wandb_logger.log({"Mosaics": [wandb_logger.wandb.Image(str(x), caption=x.name) for x in
+ save_dir.glob('train*.jpg') if x.exists()]})
+
+ # end batch ------------------------------------------------------------------------------------------------
+ # end epoch ----------------------------------------------------------------------------------------------------
+
+ # Scheduler
+ lr = [x['lr'] for x in optimizer.param_groups] # for tensorboard
+ scheduler.step()
+
+ # DDP process 0 or single-GPU
+ if rank in [-1, 0]:
+ # mAP
+ ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'gr', 'names', 'stride', 'class_weights'])
+ final_epoch = epoch + 1 == epochs
+ if not opt.notest or final_epoch: # Calculate mAP
+ wandb_logger.current_epoch = epoch + 1
+ results, maps, times = test.test(data_dict,
+ batch_size=batch_size * 2,
+ imgsz=imgsz_test,
+ model=ema.ema,
+ single_cls=opt.single_cls,
+ dataloader=testloader,
+ save_dir=save_dir,
+ verbose=nc < 50 and final_epoch,
+ plots=plots and final_epoch,
+ wandb_logger=wandb_logger,
+ compute_loss=compute_loss,
+ is_coco=is_coco,
+ v5_metric=opt.v5_metric)
+
+ # Write
+ with open(results_file, 'a') as f:
+ f.write(s + '%10.4g' * 7 % results + '\n') # append metrics, val_loss
+ if len(opt.name) and opt.bucket:
+ os.system('gsutil cp %s gs://%s/results/results%s.txt' % (results_file, opt.bucket, opt.name))
+
+ # Log
+ tags = ['train/box_loss', 'train/obj_loss', 'train/cls_loss', # train loss
+ 'metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/mAP_0.5:0.95',
+ 'val/box_loss', 'val/obj_loss', 'val/cls_loss', # val loss
+ 'x/lr0', 'x/lr1', 'x/lr2'] # params
+ for x, tag in zip(list(mloss[:-1]) + list(results) + lr, tags):
+ if tb_writer:
+ tb_writer.add_scalar(tag, x, epoch) # tensorboard
+ if wandb_logger.wandb:
+ wandb_logger.log({tag: x}) # W&B
+
+ # Update best mAP
+ fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
+ if fi > best_fitness:
+ best_fitness = fi
+ wandb_logger.end_epoch(best_result=best_fitness == fi)
+
+ # Save model
+ if (not opt.nosave) or (final_epoch and not opt.evolve): # if save
+ ckpt = {'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'training_results': results_file.read_text(),
+ 'model': deepcopy(model.module if is_parallel(model) else model).half(),
+ 'ema': deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': optimizer.state_dict(),
+ 'wandb_id': wandb_logger.wandb_run.id if wandb_logger.wandb else None}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fi:
+ torch.save(ckpt, best)
+ if (best_fitness == fi) and (epoch >= 200):
+ torch.save(ckpt, wdir / 'best_{:03d}.pt'.format(epoch))
+ if epoch == 0:
+ torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
+ elif ((epoch+1) % 25) == 0:
+ torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
+ elif epoch >= (epochs-5):
+ torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
+ if wandb_logger.wandb:
+ if ((epoch + 1) % opt.save_period == 0 and not final_epoch) and opt.save_period != -1:
+ wandb_logger.log_model(
+ last.parent, opt, epoch, fi, best_model=best_fitness == fi)
+ del ckpt
+
+ # end epoch ----------------------------------------------------------------------------------------------------
+ # end training
+ if rank in [-1, 0]:
+ # Plots
+ if plots:
+ plot_results(save_dir=save_dir) # save as results.png
+ if wandb_logger.wandb:
+ files = ['results.png', 'confusion_matrix.png', *[f'{x}_curve.png' for x in ('F1', 'PR', 'P', 'R')]]
+ wandb_logger.log({"Results": [wandb_logger.wandb.Image(str(save_dir / f), caption=f) for f in files
+ if (save_dir / f).exists()]})
+ # Test best.pt
+ logger.info('%g epochs completed in %.3f hours.\n' % (epoch - start_epoch + 1, (time.time() - t0) / 3600))
+ if opt.data.endswith('coco.yaml') and nc == 80: # if COCO
+ for m in (last, best) if best.exists() else (last): # speed, mAP tests
+ results, _, _ = test.test(opt.data,
+ batch_size=batch_size * 2,
+ imgsz=imgsz_test,
+ conf_thres=0.001,
+ iou_thres=0.7,
+ model=attempt_load(m, device).half(),
+ single_cls=opt.single_cls,
+ dataloader=testloader,
+ save_dir=save_dir,
+ save_json=True,
+ plots=False,
+ is_coco=is_coco,
+ v5_metric=opt.v5_metric)
+
+ # Strip optimizers
+ final = best if best.exists() else last # final model
+ for f in last, best:
+ if f.exists():
+ strip_optimizer(f) # strip optimizers
+ if opt.bucket:
+ os.system(f'gsutil cp {final} gs://{opt.bucket}/weights') # upload
+ if wandb_logger.wandb and not opt.evolve: # Log the stripped model
+ wandb_logger.wandb.log_artifact(str(final), type='model',
+ name='run_' + wandb_logger.wandb_run.id + '_model',
+ aliases=['last', 'best', 'stripped'])
+ wandb_logger.finish_run()
+ else:
+ dist.destroy_process_group()
+ torch.cuda.empty_cache()
+ return results
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default='yolo7.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default='data/coco.yaml', help='data.yaml path')
+ parser.add_argument('--hyp', type=str, default='data/hyp.scratch.p5.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300)
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs')
+ parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='[train, test] image sizes')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--notest', action='store_true', help='only test final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
+ parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--adam', action='store_true', help='use torch.optim.Adam() optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')
+ parser.add_argument('--workers', type=int, default=8, help='maximum number of dataloader workers')
+ parser.add_argument('--project', default='runs/train', help='save to project/name')
+ parser.add_argument('--entity', default=None, help='W&B entity')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--linear-lr', action='store_true', help='linear LR')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--upload_dataset', action='store_true', help='Upload dataset as W&B artifact table')
+ parser.add_argument('--bbox_interval', type=int, default=-1, help='Set bounding-box image logging interval for W&B')
+ parser.add_argument('--save_period', type=int, default=-1, help='Log model after every "save_period" epoch')
+ parser.add_argument('--artifact_alias', type=str, default="latest", help='version of dataset artifact to be used')
+ parser.add_argument('--v5-metric', action='store_true', help='assume maximum recall as 1.0 in AP calculation')
+ opt = parser.parse_args()
+
+ # Set DDP variables
+ opt.world_size = int(os.environ['WORLD_SIZE']) if 'WORLD_SIZE' in os.environ else 1
+ opt.global_rank = int(os.environ['RANK']) if 'RANK' in os.environ else -1
+ set_logging(opt.global_rank)
+ #if opt.global_rank in [-1, 0]:
+ # check_git_status()
+ # check_requirements()
+
+ # Resume
+ wandb_run = check_wandb_resume(opt)
+ if opt.resume and not wandb_run: # resume an interrupted run
+ ckpt = opt.resume if isinstance(opt.resume, str) else get_latest_run() # specified or most recent path
+ assert os.path.isfile(ckpt), 'ERROR: --resume checkpoint does not exist'
+ apriori = opt.global_rank, opt.local_rank
+ with open(Path(ckpt).parent.parent / 'opt.yaml') as f:
+ opt = argparse.Namespace(**yaml.load(f, Loader=yaml.SafeLoader)) # replace
+ opt.cfg, opt.weights, opt.resume, opt.batch_size, opt.global_rank, opt.local_rank = '', ckpt, True, opt.total_batch_size, *apriori # reinstate
+ logger.info('Resuming training from %s' % ckpt)
+ else:
+ # opt.hyp = opt.hyp or ('hyp.finetune.yaml' if opt.weights else 'hyp.scratch.yaml')
+ opt.data, opt.cfg, opt.hyp = check_file(opt.data), check_file(opt.cfg), check_file(opt.hyp) # check files
+ assert len(opt.cfg) or len(opt.weights), 'either --cfg or --weights must be specified'
+ opt.img_size.extend([opt.img_size[-1]] * (2 - len(opt.img_size))) # extend to 2 sizes (train, test)
+ opt.name = 'evolve' if opt.evolve else opt.name
+ opt.save_dir = increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok | opt.evolve) # increment run
+
+ # DDP mode
+ opt.total_batch_size = opt.batch_size
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if opt.local_rank != -1:
+ assert torch.cuda.device_count() > opt.local_rank
+ torch.cuda.set_device(opt.local_rank)
+ device = torch.device('cuda', opt.local_rank)
+ dist.init_process_group(backend='nccl', init_method='env://') # distributed backend
+ assert opt.batch_size % opt.world_size == 0, '--batch-size must be multiple of CUDA device count'
+ opt.batch_size = opt.total_batch_size // opt.world_size
+
+ # Hyperparameters
+ with open(opt.hyp) as f:
+ hyp = yaml.load(f, Loader=yaml.SafeLoader) # load hyps
+
+ # Train
+ logger.info(opt)
+ if not opt.evolve:
+ tb_writer = None # init loggers
+ if opt.global_rank in [-1, 0]:
+ prefix = colorstr('tensorboard: ')
+ logger.info(f"{prefix}Start with 'tensorboard --logdir {opt.project}', view at http://localhost:6006/")
+ tb_writer = SummaryWriter(opt.save_dir) # Tensorboard
+ train(hyp, opt, device, tb_writer)
+
+ # Evolve hyperparameters (optional)
+ else:
+ # Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)
+ meta = {'lr0': (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
+ 'lrf': (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
+ 'momentum': (0.3, 0.6, 0.98), # SGD momentum/Adam beta1
+ 'weight_decay': (1, 0.0, 0.001), # optimizer weight decay
+ 'warmup_epochs': (1, 0.0, 5.0), # warmup epochs (fractions ok)
+ 'warmup_momentum': (1, 0.0, 0.95), # warmup initial momentum
+ 'warmup_bias_lr': (1, 0.0, 0.2), # warmup initial bias lr
+ 'box': (1, 0.02, 0.2), # box loss gain
+ 'cls': (1, 0.2, 4.0), # cls loss gain
+ 'cls_pw': (1, 0.5, 2.0), # cls BCELoss positive_weight
+ 'obj': (1, 0.2, 4.0), # obj loss gain (scale with pixels)
+ 'obj_pw': (1, 0.5, 2.0), # obj BCELoss positive_weight
+ 'iou_t': (0, 0.1, 0.7), # IoU training threshold
+ 'anchor_t': (1, 2.0, 8.0), # anchor-multiple threshold
+ 'anchors': (2, 2.0, 10.0), # anchors per output grid (0 to ignore)
+ 'fl_gamma': (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
+ 'hsv_h': (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
+ 'hsv_s': (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
+ 'hsv_v': (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)
+ 'degrees': (1, 0.0, 45.0), # image rotation (+/- deg)
+ 'translate': (1, 0.0, 0.9), # image translation (+/- fraction)
+ 'scale': (1, 0.0, 0.9), # image scale (+/- gain)
+ 'shear': (1, 0.0, 10.0), # image shear (+/- deg)
+ 'perspective': (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
+ 'flipud': (1, 0.0, 1.0), # image flip up-down (probability)
+ 'fliplr': (0, 0.0, 1.0), # image flip left-right (probability)
+ 'mosaic': (1, 0.0, 1.0), # image mixup (probability)
+ 'mixup': (1, 0.0, 1.0)} # image mixup (probability)
+
+ with open(opt.hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ if 'anchors' not in hyp: # anchors commented in hyp.yaml
+ hyp['anchors'] = 3
+
+ assert opt.local_rank == -1, 'DDP mode not implemented for --evolve'
+ opt.notest, opt.nosave = True, True # only test/save final epoch
+ # ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
+ yaml_file = Path(opt.save_dir) / 'hyp_evolved.yaml' # save best result here
+ if opt.bucket:
+ os.system('gsutil cp gs://%s/evolve.txt .' % opt.bucket) # download evolve.txt if exists
+
+ for _ in range(300): # generations to evolve
+ if Path('evolve.txt').exists(): # if evolve.txt exists: select best hyps and mutate
+ # Select parent(s)
+ parent = 'single' # parent selection method: 'single' or 'weighted'
+ x = np.loadtxt('evolve.txt', ndmin=2)
+ n = min(5, len(x)) # number of previous results to consider
+ x = x[np.argsort(-fitness(x))][:n] # top n mutations
+ w = fitness(x) - fitness(x).min() # weights
+ if parent == 'single' or len(x) == 1:
+ # x = x[random.randint(0, n - 1)] # random selection
+ x = x[random.choices(range(n), weights=w)[0]] # weighted selection
+ elif parent == 'weighted':
+ x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
+
+ # Mutate
+ mp, s = 0.8, 0.2 # mutation probability, sigma
+ npr = np.random
+ npr.seed(int(time.time()))
+ g = np.array([x[0] for x in meta.values()]) # gains 0-1
+ ng = len(meta)
+ v = np.ones(ng)
+ while all(v == 1): # mutate until a change occurs (prevent duplicates)
+ v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
+ for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
+ hyp[k] = float(x[i + 7] * v[i]) # mutate
+
+ # Constrain to limits
+ for k, v in meta.items():
+ hyp[k] = max(hyp[k], v[1]) # lower limit
+ hyp[k] = min(hyp[k], v[2]) # upper limit
+ hyp[k] = round(hyp[k], 5) # significant digits
+
+ # Train mutation
+ results = train(hyp.copy(), opt, device)
+
+ # Write mutation results
+ print_mutation(hyp.copy(), results, yaml_file, opt.bucket)
+
+ # Plot results
+ plot_evolution(yaml_file)
+ print(f'Hyperparameter evolution complete. Best results saved as: {yaml_file}\n'
+ f'Command to train a new model with these hyperparameters: $ python train.py --hyp {yaml_file}')
diff --git a/ipex/utils/__init__.py b/ipex/utils/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/ipex/utils/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/ipex/utils/activations.py b/ipex/utils/activations.py
new file mode 100644
index 000000000..aa3ddf071
--- /dev/null
+++ b/ipex/utils/activations.py
@@ -0,0 +1,72 @@
+# Activation functions
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+
+# SiLU https://arxiv.org/pdf/1606.08415.pdf ----------------------------------------------------------------------------
+class SiLU(nn.Module): # export-friendly version of nn.SiLU()
+ @staticmethod
+ def forward(x):
+ return x * torch.sigmoid(x)
+
+
+class Hardswish(nn.Module): # export-friendly version of nn.Hardswish()
+ @staticmethod
+ def forward(x):
+ # return x * F.hardsigmoid(x) # for torchscript and CoreML
+ return x * F.hardtanh(x + 3, 0., 6.) / 6. # for torchscript, CoreML and ONNX
+
+
+class MemoryEfficientSwish(nn.Module):
+ class F(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x * torch.sigmoid(x)
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ return grad_output * (sx * (1 + x * (1 - sx)))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+# Mish https://github.com/digantamisra98/Mish --------------------------------------------------------------------------
+class Mish(nn.Module):
+ @staticmethod
+ def forward(x):
+ return x * F.softplus(x).tanh()
+
+
+class MemoryEfficientMish(nn.Module):
+ class F(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ fx = F.softplus(x).tanh()
+ return grad_output * (fx + x * sx * (1 - fx * fx))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+# FReLU https://arxiv.org/abs/2007.11824 -------------------------------------------------------------------------------
+class FReLU(nn.Module):
+ def __init__(self, c1, k=3): # ch_in, kernel
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
+ self.bn = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ return torch.max(x, self.bn(self.conv(x)))
diff --git a/ipex/utils/add_nms.py b/ipex/utils/add_nms.py
new file mode 100644
index 000000000..0a1f7976a
--- /dev/null
+++ b/ipex/utils/add_nms.py
@@ -0,0 +1,155 @@
+import numpy as np
+import onnx
+from onnx import shape_inference
+try:
+ import onnx_graphsurgeon as gs
+except Exception as e:
+ print('Import onnx_graphsurgeon failure: %s' % e)
+
+import logging
+
+LOGGER = logging.getLogger(__name__)
+
+class RegisterNMS(object):
+ def __init__(
+ self,
+ onnx_model_path: str,
+ precision: str = "fp32",
+ ):
+
+ self.graph = gs.import_onnx(onnx.load(onnx_model_path))
+ assert self.graph
+ LOGGER.info("ONNX graph created successfully")
+ # Fold constants via ONNX-GS that PyTorch2ONNX may have missed
+ self.graph.fold_constants()
+ self.precision = precision
+ self.batch_size = 1
+ def infer(self):
+ """
+ Sanitize the graph by cleaning any unconnected nodes, do a topological resort,
+ and fold constant inputs values. When possible, run shape inference on the
+ ONNX graph to determine tensor shapes.
+ """
+ for _ in range(3):
+ count_before = len(self.graph.nodes)
+
+ self.graph.cleanup().toposort()
+ try:
+ for node in self.graph.nodes:
+ for o in node.outputs:
+ o.shape = None
+ model = gs.export_onnx(self.graph)
+ model = shape_inference.infer_shapes(model)
+ self.graph = gs.import_onnx(model)
+ except Exception as e:
+ LOGGER.info(f"Shape inference could not be performed at this time:\n{e}")
+ try:
+ self.graph.fold_constants(fold_shapes=True)
+ except TypeError as e:
+ LOGGER.error(
+ "This version of ONNX GraphSurgeon does not support folding shapes, "
+ f"please upgrade your onnx_graphsurgeon module. Error:\n{e}"
+ )
+ raise
+
+ count_after = len(self.graph.nodes)
+ if count_before == count_after:
+ # No new folding occurred in this iteration, so we can stop for now.
+ break
+
+ def save(self, output_path):
+ """
+ Save the ONNX model to the given location.
+ Args:
+ output_path: Path pointing to the location where to write
+ out the updated ONNX model.
+ """
+ self.graph.cleanup().toposort()
+ model = gs.export_onnx(self.graph)
+ onnx.save(model, output_path)
+ LOGGER.info(f"Saved ONNX model to {output_path}")
+
+ def register_nms(
+ self,
+ *,
+ score_thresh: float = 0.25,
+ nms_thresh: float = 0.45,
+ detections_per_img: int = 100,
+ ):
+ """
+ Register the ``EfficientNMS_TRT`` plugin node.
+ NMS expects these shapes for its input tensors:
+ - box_net: [batch_size, number_boxes, 4]
+ - class_net: [batch_size, number_boxes, number_labels]
+ Args:
+ score_thresh (float): The scalar threshold for score (low scoring boxes are removed).
+ nms_thresh (float): The scalar threshold for IOU (new boxes that have high IOU
+ overlap with previously selected boxes are removed).
+ detections_per_img (int): Number of best detections to keep after NMS.
+ """
+
+ self.infer()
+ # Find the concat node at the end of the network
+ op_inputs = self.graph.outputs
+ op = "EfficientNMS_TRT"
+ attrs = {
+ "plugin_version": "1",
+ "background_class": -1, # no background class
+ "max_output_boxes": detections_per_img,
+ "score_threshold": score_thresh,
+ "iou_threshold": nms_thresh,
+ "score_activation": False,
+ "box_coding": 0,
+ }
+
+ if self.precision == "fp32":
+ dtype_output = np.float32
+ elif self.precision == "fp16":
+ dtype_output = np.float16
+ else:
+ raise NotImplementedError(f"Currently not supports precision: {self.precision}")
+
+ # NMS Outputs
+ output_num_detections = gs.Variable(
+ name="num_dets",
+ dtype=np.int32,
+ shape=[self.batch_size, 1],
+ ) # A scalar indicating the number of valid detections per batch image.
+ output_boxes = gs.Variable(
+ name="det_boxes",
+ dtype=dtype_output,
+ shape=[self.batch_size, detections_per_img, 4],
+ )
+ output_scores = gs.Variable(
+ name="det_scores",
+ dtype=dtype_output,
+ shape=[self.batch_size, detections_per_img],
+ )
+ output_labels = gs.Variable(
+ name="det_classes",
+ dtype=np.int32,
+ shape=[self.batch_size, detections_per_img],
+ )
+
+ op_outputs = [output_num_detections, output_boxes, output_scores, output_labels]
+
+ # Create the NMS Plugin node with the selected inputs. The outputs of the node will also
+ # become the final outputs of the graph.
+ self.graph.layer(op=op, name="batched_nms", inputs=op_inputs, outputs=op_outputs, attrs=attrs)
+ LOGGER.info(f"Created NMS plugin '{op}' with attributes: {attrs}")
+
+ self.graph.outputs = op_outputs
+
+ self.infer()
+
+ def save(self, output_path):
+ """
+ Save the ONNX model to the given location.
+ Args:
+ output_path: Path pointing to the location where to write
+ out the updated ONNX model.
+ """
+ self.graph.cleanup().toposort()
+ model = gs.export_onnx(self.graph)
+ onnx.save(model, output_path)
+ LOGGER.info(f"Saved ONNX model to {output_path}")
diff --git a/ipex/utils/autoanchor.py b/ipex/utils/autoanchor.py
new file mode 100644
index 000000000..f491032e5
--- /dev/null
+++ b/ipex/utils/autoanchor.py
@@ -0,0 +1,160 @@
+# Auto-anchor utils
+
+import numpy as np
+import torch
+import yaml
+from scipy.cluster.vq import kmeans
+from tqdm import tqdm
+
+from utils.general import colorstr
+
+
+def check_anchor_order(m):
+ # Check anchor order against stride order for YOLO Detect() module m, and correct if necessary
+ a = m.anchor_grid.prod(-1).view(-1) # anchor area
+ da = a[-1] - a[0] # delta a
+ ds = m.stride[-1] - m.stride[0] # delta s
+ if da.sign() != ds.sign(): # same order
+ print('Reversing anchor order')
+ m.anchors[:] = m.anchors.flip(0)
+ m.anchor_grid[:] = m.anchor_grid.flip(0)
+
+
+def check_anchors(dataset, model, thr=4.0, imgsz=640):
+ # Check anchor fit to data, recompute if necessary
+ prefix = colorstr('autoanchor: ')
+ print(f'\n{prefix}Analyzing anchors... ', end='')
+ m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
+ shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
+ wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
+
+ def metric(k): # compute metric
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1. / r).min(2)[0] # ratio metric
+ best = x.max(1)[0] # best_x
+ aat = (x > 1. / thr).float().sum(1).mean() # anchors above threshold
+ bpr = (best > 1. / thr).float().mean() # best possible recall
+ return bpr, aat
+
+ anchors = m.anchor_grid.clone().cpu().view(-1, 2) # current anchors
+ bpr, aat = metric(anchors)
+ print(f'anchors/target = {aat:.2f}, Best Possible Recall (BPR) = {bpr:.4f}', end='')
+ if bpr < 0.98: # threshold to recompute
+ print('. Attempting to improve anchors, please wait...')
+ na = m.anchor_grid.numel() // 2 # number of anchors
+ try:
+ anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
+ except Exception as e:
+ print(f'{prefix}ERROR: {e}')
+ new_bpr = metric(anchors)[0]
+ if new_bpr > bpr: # replace anchors
+ anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
+ m.anchor_grid[:] = anchors.clone().view_as(m.anchor_grid) # for inference
+ check_anchor_order(m)
+ m.anchors[:] = anchors.clone().view_as(m.anchors) / m.stride.to(m.anchors.device).view(-1, 1, 1) # loss
+ print(f'{prefix}New anchors saved to model. Update model *.yaml to use these anchors in the future.')
+ else:
+ print(f'{prefix}Original anchors better than new anchors. Proceeding with original anchors.')
+ print('') # newline
+
+
+def kmean_anchors(path='./data/coco.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
+ """ Creates kmeans-evolved anchors from training dataset
+
+ Arguments:
+ path: path to dataset *.yaml, or a loaded dataset
+ n: number of anchors
+ img_size: image size used for training
+ thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
+ gen: generations to evolve anchors using genetic algorithm
+ verbose: print all results
+
+ Return:
+ k: kmeans evolved anchors
+
+ Usage:
+ from utils.autoanchor import *; _ = kmean_anchors()
+ """
+ thr = 1. / thr
+ prefix = colorstr('autoanchor: ')
+
+ def metric(k, wh): # compute metrics
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1. / r).min(2)[0] # ratio metric
+ # x = wh_iou(wh, torch.tensor(k)) # iou metric
+ return x, x.max(1)[0] # x, best_x
+
+ def anchor_fitness(k): # mutation fitness
+ _, best = metric(torch.tensor(k, dtype=torch.float32), wh)
+ return (best * (best > thr).float()).mean() # fitness
+
+ def print_results(k):
+ k = k[np.argsort(k.prod(1))] # sort small to large
+ x, best = metric(k, wh0)
+ bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
+ print(f'{prefix}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr')
+ print(f'{prefix}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, '
+ f'past_thr={x[x > thr].mean():.3f}-mean: ', end='')
+ for i, x in enumerate(k):
+ print('%i,%i' % (round(x[0]), round(x[1])), end=', ' if i < len(k) - 1 else '\n') # use in *.cfg
+ return k
+
+ if isinstance(path, str): # *.yaml file
+ with open(path) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # model dict
+ from utils.datasets import LoadImagesAndLabels
+ dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
+ else:
+ dataset = path # dataset
+
+ # Get label wh
+ shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
+
+ # Filter
+ i = (wh0 < 3.0).any(1).sum()
+ if i:
+ print(f'{prefix}WARNING: Extremely small objects found. {i} of {len(wh0)} labels are < 3 pixels in size.')
+ wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ # wh = wh * (np.random.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
+
+ # Kmeans calculation
+ print(f'{prefix}Running kmeans for {n} anchors on {len(wh)} points...')
+ s = wh.std(0) # sigmas for whitening
+ k, dist = kmeans(wh / s, n, iter=30) # points, mean distance
+ assert len(k) == n, print(f'{prefix}ERROR: scipy.cluster.vq.kmeans requested {n} points but returned only {len(k)}')
+ k *= s
+ wh = torch.tensor(wh, dtype=torch.float32) # filtered
+ wh0 = torch.tensor(wh0, dtype=torch.float32) # unfiltered
+ k = print_results(k)
+
+ # Plot
+ # k, d = [None] * 20, [None] * 20
+ # for i in tqdm(range(1, 21)):
+ # k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
+ # ax = ax.ravel()
+ # ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
+ # ax[0].hist(wh[wh[:, 0]<100, 0],400)
+ # ax[1].hist(wh[wh[:, 1]<100, 1],400)
+ # fig.savefig('wh.png', dpi=200)
+
+ # Evolve
+ npr = np.random
+ f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
+ pbar = tqdm(range(gen), desc=f'{prefix}Evolving anchors with Genetic Algorithm:') # progress bar
+ for _ in pbar:
+ v = np.ones(sh)
+ while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
+ v = ((npr.random(sh) < mp) * npr.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
+ kg = (k.copy() * v).clip(min=2.0)
+ fg = anchor_fitness(kg)
+ if fg > f:
+ f, k = fg, kg.copy()
+ pbar.desc = f'{prefix}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
+ if verbose:
+ print_results(k)
+
+ return print_results(k)
diff --git a/ipex/utils/aws/__init__.py b/ipex/utils/aws/__init__.py
new file mode 100644
index 000000000..e9691f241
--- /dev/null
+++ b/ipex/utils/aws/__init__.py
@@ -0,0 +1 @@
+#init
\ No newline at end of file
diff --git a/ipex/utils/aws/mime.sh b/ipex/utils/aws/mime.sh
new file mode 100644
index 000000000..c319a83cf
--- /dev/null
+++ b/ipex/utils/aws/mime.sh
@@ -0,0 +1,26 @@
+# AWS EC2 instance startup 'MIME' script https://aws.amazon.com/premiumsupport/knowledge-center/execute-user-data-ec2/
+# This script will run on every instance restart, not only on first start
+# --- DO NOT COPY ABOVE COMMENTS WHEN PASTING INTO USERDATA ---
+
+Content-Type: multipart/mixed; boundary="//"
+MIME-Version: 1.0
+
+--//
+Content-Type: text/cloud-config; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="cloud-config.txt"
+
+#cloud-config
+cloud_final_modules:
+- [scripts-user, always]
+
+--//
+Content-Type: text/x-shellscript; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="userdata.txt"
+
+#!/bin/bash
+# --- paste contents of userdata.sh here ---
+--//
diff --git a/ipex/utils/aws/resume.py b/ipex/utils/aws/resume.py
new file mode 100644
index 000000000..338685b19
--- /dev/null
+++ b/ipex/utils/aws/resume.py
@@ -0,0 +1,37 @@
+# Resume all interrupted trainings in yolor/ dir including DDP trainings
+# Usage: $ python utils/aws/resume.py
+
+import os
+import sys
+from pathlib import Path
+
+import torch
+import yaml
+
+sys.path.append('./') # to run '$ python *.py' files in subdirectories
+
+port = 0 # --master_port
+path = Path('').resolve()
+for last in path.rglob('*/**/last.pt'):
+ ckpt = torch.load(last)
+ if ckpt['optimizer'] is None:
+ continue
+
+ # Load opt.yaml
+ with open(last.parent.parent / 'opt.yaml') as f:
+ opt = yaml.load(f, Loader=yaml.SafeLoader)
+
+ # Get device count
+ d = opt['device'].split(',') # devices
+ nd = len(d) # number of devices
+ ddp = nd > 1 or (nd == 0 and torch.cuda.device_count() > 1) # distributed data parallel
+
+ if ddp: # multi-GPU
+ port += 1
+ cmd = f'python -m torch.distributed.launch --nproc_per_node {nd} --master_port {port} train.py --resume {last}'
+ else: # single-GPU
+ cmd = f'python train.py --resume {last}'
+
+ cmd += ' > /dev/null 2>&1 &' # redirect output to dev/null and run in daemon thread
+ print(cmd)
+ os.system(cmd)
diff --git a/ipex/utils/aws/userdata.sh b/ipex/utils/aws/userdata.sh
new file mode 100644
index 000000000..5a99d4bec
--- /dev/null
+++ b/ipex/utils/aws/userdata.sh
@@ -0,0 +1,27 @@
+#!/bin/bash
+# AWS EC2 instance startup script https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/user-data.html
+# This script will run only once on first instance start (for a re-start script see mime.sh)
+# /home/ubuntu (ubuntu) or /home/ec2-user (amazon-linux) is working dir
+# Use >300 GB SSD
+
+cd home/ubuntu
+if [ ! -d yolor ]; then
+ echo "Running first-time script." # install dependencies, download COCO, pull Docker
+ git clone -b main https://github.com/WongKinYiu/yolov7 && sudo chmod -R 777 yolov7
+ cd yolov7
+ bash data/scripts/get_coco.sh && echo "Data done." &
+ sudo docker pull nvcr.io/nvidia/pytorch:21.08-py3 && echo "Docker done." &
+ python -m pip install --upgrade pip && pip install -r requirements.txt && python detect.py && echo "Requirements done." &
+ wait && echo "All tasks done." # finish background tasks
+else
+ echo "Running re-start script." # resume interrupted runs
+ i=0
+ list=$(sudo docker ps -qa) # container list i.e. $'one\ntwo\nthree\nfour'
+ while IFS= read -r id; do
+ ((i++))
+ echo "restarting container $i: $id"
+ sudo docker start $id
+ # sudo docker exec -it $id python train.py --resume # single-GPU
+ sudo docker exec -d $id python utils/aws/resume.py # multi-scenario
+ done <<<"$list"
+fi
diff --git a/ipex/utils/datasets.py b/ipex/utils/datasets.py
new file mode 100644
index 000000000..026ef68fe
--- /dev/null
+++ b/ipex/utils/datasets.py
@@ -0,0 +1,1329 @@
+# Dataset utils and dataloaders
+
+import glob
+import logging
+import math
+import os
+import random
+import shutil
+import time
+from itertools import repeat
+from multiprocessing.pool import ThreadPool
+from pathlib import Path
+from threading import Thread
+
+import cv2
+import numpy as np
+import torch
+import torch.nn.functional as F
+from PIL import Image, ExifTags
+from torch.utils.data import Dataset
+from tqdm import tqdm
+
+import pickle
+from copy import deepcopy
+#from pycocotools import mask as maskUtils
+from torchvision.utils import save_image
+from torchvision.ops import roi_pool, roi_align, ps_roi_pool, ps_roi_align
+
+from utils.general import check_requirements, xyxy2xywh, xywh2xyxy, xywhn2xyxy, xyn2xy, segment2box, segments2boxes, \
+ resample_segments, clean_str
+from utils.torch_utils import torch_distributed_zero_first
+
+# Parameters
+help_url = 'https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
+img_formats = ['bmp', 'jpg', 'jpeg', 'png', 'tif', 'tiff', 'dng', 'webp', 'mpo'] # acceptable image suffixes
+vid_formats = ['mov', 'avi', 'mp4', 'mpg', 'mpeg', 'm4v', 'wmv', 'mkv'] # acceptable video suffixes
+logger = logging.getLogger(__name__)
+
+# Get orientation exif tag
+for orientation in ExifTags.TAGS.keys():
+ if ExifTags.TAGS[orientation] == 'Orientation':
+ break
+
+
+def get_hash(files):
+ # Returns a single hash value of a list of files
+ return sum(os.path.getsize(f) for f in files if os.path.isfile(f))
+
+
+def exif_size(img):
+ # Returns exif-corrected PIL size
+ s = img.size # (width, height)
+ try:
+ rotation = dict(img._getexif().items())[orientation]
+ if rotation == 6: # rotation 270
+ s = (s[1], s[0])
+ elif rotation == 8: # rotation 90
+ s = (s[1], s[0])
+ except:
+ pass
+
+ return s
+
+
+def create_dataloader(path, imgsz, batch_size, stride, opt, hyp=None, augment=False, cache=False, pad=0.0, rect=False,
+ rank=-1, world_size=1, workers=8, image_weights=False, quad=False, prefix=''):
+ # Make sure only the first process in DDP process the dataset first, and the following others can use the cache
+ with torch_distributed_zero_first(rank):
+ dataset = LoadImagesAndLabels(path, imgsz, batch_size,
+ augment=augment, # augment images
+ hyp=hyp, # augmentation hyperparameters
+ rect=rect, # rectangular training
+ cache_images=cache,
+ single_cls=opt.single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix)
+
+ batch_size = min(batch_size, len(dataset))
+ nw = min([os.cpu_count() // world_size, batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = torch.utils.data.distributed.DistributedSampler(dataset) if rank != -1 else None
+ loader = torch.utils.data.DataLoader if image_weights else InfiniteDataLoader
+ # Use torch.utils.data.DataLoader() if dataset.properties will update during training else InfiniteDataLoader()
+ dataloader = loader(dataset,
+ batch_size=batch_size,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn)
+ return dataloader, dataset
+
+
+class InfiniteDataLoader(torch.utils.data.dataloader.DataLoader):
+ """ Dataloader that reuses workers
+
+ Uses same syntax as vanilla DataLoader
+ """
+
+ def __init__(self, *args, **kwargs):
+ super().__init__(*args, **kwargs)
+ object.__setattr__(self, 'batch_sampler', _RepeatSampler(self.batch_sampler))
+ self.iterator = super().__iter__()
+
+ def __len__(self):
+ return len(self.batch_sampler.sampler)
+
+ def __iter__(self):
+ for i in range(len(self)):
+ yield next(self.iterator)
+
+
+class _RepeatSampler(object):
+ """ Sampler that repeats forever
+
+ Args:
+ sampler (Sampler)
+ """
+
+ def __init__(self, sampler):
+ self.sampler = sampler
+
+ def __iter__(self):
+ while True:
+ yield from iter(self.sampler)
+
+
+class LoadImages: # for inference
+ def __init__(self, path, img_size=640, stride=32):
+ p = str(Path(path).absolute()) # os-agnostic absolute path
+ if '*' in p:
+ files = sorted(glob.glob(p, recursive=True)) # glob
+ elif os.path.isdir(p):
+ files = sorted(glob.glob(os.path.join(p, '*.*'))) # dir
+ elif os.path.isfile(p):
+ files = [p] # files
+ else:
+ raise Exception(f'ERROR: {p} does not exist')
+
+ images = [x for x in files if x.split('.')[-1].lower() in img_formats]
+ videos = [x for x in files if x.split('.')[-1].lower() in vid_formats]
+ ni, nv = len(images), len(videos)
+
+ self.img_size = img_size
+ self.stride = stride
+ self.files = images + videos
+ self.nf = ni + nv # number of files
+ self.video_flag = [False] * ni + [True] * nv
+ self.mode = 'image'
+ if any(videos):
+ self.new_video(videos[0]) # new video
+ else:
+ self.cap = None
+ assert self.nf > 0, f'No images or videos found in {p}. ' \
+ f'Supported formats are:\nimages: {img_formats}\nvideos: {vid_formats}'
+
+ def __iter__(self):
+ self.count = 0
+ return self
+
+ def __next__(self):
+ if self.count == self.nf:
+ raise StopIteration
+ path = self.files[self.count]
+ if "\\" in path:
+ path = path.replace("\\", "/")
+ path = path.replace("\t", "/t")
+
+ if self.video_flag[self.count]:
+ # Read video
+ self.mode = 'video'
+ ret_val, img0 = self.cap.read()
+ if not ret_val:
+ self.count += 1
+ self.cap.release()
+ if self.count == self.nf: # last video
+ raise StopIteration
+ else:
+ path = self.files[self.count]
+ if "\\" in path:
+ path = path.replace("\\", "/")
+ path = path.replace("\t", "/t")
+ self.new_video(path)
+ ret_val, img0 = self.cap.read()
+
+ self.frame += 1
+ print(f'video {self.count + 1}/{self.nf} ({self.frame}/{self.nframes}) {path}: ', end='')
+
+ else:
+ # Read image
+ self.count += 1
+ img0 = cv2.imread(path) # BGR
+ assert img0 is not None, 'Image Not Found ' + path
+ #print(f'image {self.count}/{self.nf} {path}: ', end='')
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return path, img, img0, self.cap
+
+ def new_video(self, path):
+ self.frame = 0
+ self.cap = cv2.VideoCapture(path)
+ self.nframes = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
+
+ def __len__(self):
+ return self.nf # number of files
+
+
+class LoadWebcam: # for inference
+ def __init__(self, pipe='0', img_size=640, stride=32):
+ self.img_size = img_size
+ self.stride = stride
+
+ if pipe.isnumeric():
+ pipe = eval(pipe) # local camera
+ # pipe = 'rtsp://192.168.1.64/1' # IP camera
+ # pipe = 'rtsp://username:password@192.168.1.64/1' # IP camera with login
+ # pipe = 'http://wmccpinetop.axiscam.net/mjpg/video.mjpg' # IP golf camera
+
+ self.pipe = pipe
+ self.cap = cv2.VideoCapture(pipe) # video capture object
+ self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ self.cap.release()
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Read frame
+ if self.pipe == 0: # local camera
+ ret_val, img0 = self.cap.read()
+ img0 = cv2.flip(img0, 1) # flip left-right
+ else: # IP camera
+ n = 0
+ while True:
+ n += 1
+ self.cap.grab()
+ if n % 30 == 0: # skip frames
+ ret_val, img0 = self.cap.retrieve()
+ if ret_val:
+ break
+
+ # Print
+ assert ret_val, f'Camera Error {self.pipe}'
+ img_path = 'webcam.jpg'
+ print(f'webcam {self.count}: ', end='')
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return img_path, img, img0, None
+
+ def __len__(self):
+ return 0
+
+
+class LoadStreams: # multiple IP or RTSP cameras
+ def __init__(self, sources='streams.txt', img_size=640, stride=32):
+ self.mode = 'stream'
+ self.img_size = img_size
+ self.stride = stride
+
+ if os.path.isfile(sources):
+ with open(sources, 'r') as f:
+ sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
+ else:
+ sources = [sources]
+
+ n = len(sources)
+ self.imgs = [None] * n
+ self.sources = [clean_str(x) for x in sources] # clean source names for later
+ for i, s in enumerate(sources):
+ # Start the thread to read frames from the video stream
+ print(f'{i + 1}/{n}: {s}... ', end='')
+ url = eval(s) if s.isnumeric() else s
+ if 'youtube.com/' in str(url) or 'youtu.be/' in str(url): # if source is YouTube video
+ check_requirements(('pafy', 'youtube_dl'))
+ import pafy
+ url = pafy.new(url).getbest(preftype="mp4").url
+ cap = cv2.VideoCapture(url)
+ assert cap.isOpened(), f'Failed to open {s}'
+ w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ self.fps = cap.get(cv2.CAP_PROP_FPS) % 100
+
+ _, self.imgs[i] = cap.read() # guarantee first frame
+ thread = Thread(target=self.update, args=([i, cap]), daemon=True)
+ print(f' success ({w}x{h} at {self.fps:.2f} FPS).')
+ thread.start()
+ print('') # newline
+
+ # check for common shapes
+ s = np.stack([letterbox(x, self.img_size, stride=self.stride)[0].shape for x in self.imgs], 0) # shapes
+ self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
+ if not self.rect:
+ print('WARNING: Different stream shapes detected. For optimal performance supply similarly-shaped streams.')
+
+ def update(self, index, cap):
+ # Read next stream frame in a daemon thread
+ n = 0
+ while cap.isOpened():
+ n += 1
+ # _, self.imgs[index] = cap.read()
+ cap.grab()
+ if n == 4: # read every 4th frame
+ success, im = cap.retrieve()
+ self.imgs[index] = im if success else self.imgs[index] * 0
+ n = 0
+ time.sleep(1 / self.fps) # wait time
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ img0 = self.imgs.copy()
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Letterbox
+ img = [letterbox(x, self.img_size, auto=self.rect, stride=self.stride)[0] for x in img0]
+
+ # Stack
+ img = np.stack(img, 0)
+
+ # Convert
+ img = img[:, :, :, ::-1].transpose(0, 3, 1, 2) # BGR to RGB, to bsx3x416x416
+ img = np.ascontiguousarray(img)
+
+ return self.sources, img, img0, None
+
+ def __len__(self):
+ return 0 # 1E12 frames = 32 streams at 30 FPS for 30 years
+
+
+def img2label_paths(img_paths):
+ # Define label paths as a function of image paths
+ sa, sb = os.sep + 'images' + os.sep, os.sep + 'labels' + os.sep # /images/, /labels/ substrings
+ return ['txt'.join(x.replace(sa, sb, 1).rsplit(x.split('.')[-1], 1)) for x in img_paths]
+
+
+class LoadImagesAndLabels(Dataset): # for training/testing
+ def __init__(self, path, img_size=640, batch_size=16, augment=False, hyp=None, rect=False, image_weights=False,
+ cache_images=False, single_cls=False, stride=32, pad=0.0, prefix=''):
+ self.img_size = img_size
+ self.augment = augment
+ self.hyp = hyp
+ self.image_weights = image_weights
+ self.rect = False if image_weights else rect
+ self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
+ self.mosaic_border = [-img_size // 2, -img_size // 2]
+ self.stride = stride
+ self.path = path
+ #self.albumentations = Albumentations() if augment else None
+
+ try:
+ f = [] # image files
+ for p in path if isinstance(path, list) else [path]:
+ p = Path(p) # os-agnostic
+ if p.is_dir(): # dir
+ f += glob.glob(str(p / '**' / '*.*'), recursive=True)
+ # f = list(p.rglob('**/*.*')) # pathlib
+ elif p.is_file(): # file
+ with open(p, 'r') as t:
+ t = t.read().strip().splitlines()
+ parent = str(p.parent) + os.sep
+ f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
+ # f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
+ else:
+ raise Exception(f'{prefix}{p} does not exist')
+ self.img_files = sorted([x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in img_formats])
+ # self.img_files = sorted([x for x in f if x.suffix[1:].lower() in img_formats]) # pathlib
+ assert self.img_files, f'{prefix}No images found'
+ except Exception as e:
+ raise Exception(f'{prefix}Error loading data from {path}: {e}\nSee {help_url}')
+
+ # Check cache
+ self.label_files = img2label_paths(self.img_files) # labels
+ cache_path = (p if p.is_file() else Path(self.label_files[0]).parent).with_suffix('.cache') # cached labels
+ if cache_path.is_file():
+ cache, exists = torch.load(cache_path), True # load
+ #if cache['hash'] != get_hash(self.label_files + self.img_files) or 'version' not in cache: # changed
+ # cache, exists = self.cache_labels(cache_path, prefix), False # re-cache
+ else:
+ cache, exists = self.cache_labels(cache_path, prefix), False # cache
+
+ # Display cache
+ nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupted, total
+ if exists:
+ d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupted"
+ tqdm(None, desc=prefix + d, total=n, initial=n) # display cache results
+ assert nf > 0 or not augment, f'{prefix}No labels in {cache_path}. Can not train without labels. See {help_url}'
+
+ # Read cache
+ cache.pop('hash') # remove hash
+ cache.pop('version') # remove version
+ labels, shapes, self.segments = zip(*cache.values())
+ self.labels = list(labels)
+ self.shapes = np.array(shapes, dtype=np.float64)
+ self.img_files = list(cache.keys()) # update
+ self.label_files = img2label_paths(cache.keys()) # update
+ if single_cls:
+ for x in self.labels:
+ x[:, 0] = 0
+
+ n = len(shapes) # number of images
+ bi = np.floor(np.arange(n) / batch_size).astype(int) # batch index
+ nb = bi[-1] + 1 # number of batches
+ self.batch = bi # batch index of image
+ self.n = n
+ self.indices = range(n)
+
+ # Rectangular Training
+ if self.rect:
+ # Sort by aspect ratio
+ s = self.shapes # wh
+ ar = s[:, 1] / s[:, 0] # aspect ratio
+ irect = ar.argsort()
+ self.img_files = [self.img_files[i] for i in irect]
+ self.label_files = [self.label_files[i] for i in irect]
+ self.labels = [self.labels[i] for i in irect]
+ self.shapes = s[irect] # wh
+ ar = ar[irect]
+
+ # Set training image shapes
+ shapes = [[1, 1]] * nb
+ for i in range(nb):
+ ari = ar[bi == i]
+ mini, maxi = ari.min(), ari.max()
+ if maxi < 1:
+ shapes[i] = [maxi, 1]
+ elif mini > 1:
+ shapes[i] = [1, 1 / mini]
+
+ self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(int) * stride
+
+ # Cache images into memory for faster training (WARNING: large datasets may exceed system RAM)
+ self.imgs = [None] * n
+ if cache_images:
+ if cache_images == 'disk':
+ self.im_cache_dir = Path(Path(self.img_files[0]).parent.as_posix() + '_npy')
+ self.img_npy = [self.im_cache_dir / Path(f).with_suffix('.npy').name for f in self.img_files]
+ self.im_cache_dir.mkdir(parents=True, exist_ok=True)
+ gb = 0 # Gigabytes of cached images
+ self.img_hw0, self.img_hw = [None] * n, [None] * n
+ results = ThreadPool(8).imap(lambda x: load_image(*x), zip(repeat(self), range(n)))
+ pbar = tqdm(enumerate(results), total=n)
+ for i, x in pbar:
+ if cache_images == 'disk':
+ if not self.img_npy[i].exists():
+ np.save(self.img_npy[i].as_posix(), x[0])
+ gb += self.img_npy[i].stat().st_size
+ else:
+ self.imgs[i], self.img_hw0[i], self.img_hw[i] = x
+ gb += self.imgs[i].nbytes
+ pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB)'
+ pbar.close()
+
+ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
+ # Cache dataset labels, check images and read shapes
+ x = {} # dict
+ nm, nf, ne, nc = 0, 0, 0, 0 # number missing, found, empty, duplicate
+ pbar = tqdm(zip(self.img_files, self.label_files), desc='Scanning images', total=len(self.img_files))
+ for i, (im_file, lb_file) in enumerate(pbar):
+ try:
+ # verify images
+ im = Image.open(im_file)
+ im.verify() # PIL verify
+ shape = exif_size(im) # image size
+ segments = [] # instance segments
+ assert (shape[0] > 9) & (shape[1] > 9), f'image size {shape} <10 pixels'
+ assert im.format.lower() in img_formats, f'invalid image format {im.format}'
+
+ # verify labels
+ if os.path.isfile(lb_file):
+ nf += 1 # label found
+ with open(lb_file, 'r') as f:
+ l = [x.split() for x in f.read().strip().splitlines()]
+ if any([len(x) > 8 for x in l]): # is segment
+ classes = np.array([x[0] for x in l], dtype=np.float32)
+ segments = [np.array(x[1:], dtype=np.float32).reshape(-1, 2) for x in l] # (cls, xy1...)
+ l = np.concatenate((classes.reshape(-1, 1), segments2boxes(segments)), 1) # (cls, xywh)
+ l = np.array(l, dtype=np.float32)
+ if len(l):
+ assert l.shape[1] == 5, 'labels require 5 columns each'
+ assert (l >= 0).all(), 'negative labels'
+ assert (l[:, 1:] <= 1).all(), 'non-normalized or out of bounds coordinate labels'
+ assert np.unique(l, axis=0).shape[0] == l.shape[0], 'duplicate labels'
+ else:
+ ne += 1 # label empty
+ l = np.zeros((0, 5), dtype=np.float32)
+ else:
+ nm += 1 # label missing
+ l = np.zeros((0, 5), dtype=np.float32)
+ x[im_file] = [l, shape, segments]
+ except Exception as e:
+ nc += 1
+ print(f'{prefix}WARNING: Ignoring corrupted image and/or label {im_file}: {e}')
+
+ pbar.desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels... " \
+ f"{nf} found, {nm} missing, {ne} empty, {nc} corrupted"
+ pbar.close()
+
+ if nf == 0:
+ print(f'{prefix}WARNING: No labels found in {path}. See {help_url}')
+
+ x['hash'] = get_hash(self.label_files + self.img_files)
+ x['results'] = nf, nm, ne, nc, i + 1
+ x['version'] = 0.1 # cache version
+ torch.save(x, path) # save for next time
+ logging.info(f'{prefix}New cache created: {path}')
+ return x
+
+ def __len__(self):
+ return len(self.img_files)
+
+ # def __iter__(self):
+ # self.count = -1
+ # print('ran dataset iter')
+ # #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
+ # return self
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ if mosaic:
+ # Load mosaic
+ if random.random() < 0.8:
+ img, labels = load_mosaic(self, index)
+ else:
+ img, labels = load_mosaic9(self, index)
+ shapes = None
+
+ # MixUp https://arxiv.org/pdf/1710.09412.pdf
+ if random.random() < hyp['mixup']:
+ if random.random() < 0.8:
+ img2, labels2 = load_mosaic(self, random.randint(0, len(self.labels) - 1))
+ else:
+ img2, labels2 = load_mosaic9(self, random.randint(0, len(self.labels) - 1))
+ r = np.random.beta(8.0, 8.0) # mixup ratio, alpha=beta=8.0
+ img = (img * r + img2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = load_image(self, index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ # Augment imagespace
+ if not mosaic:
+ img, labels = random_perspective(img, labels,
+ degrees=hyp['degrees'],
+ translate=hyp['translate'],
+ scale=hyp['scale'],
+ shear=hyp['shear'],
+ perspective=hyp['perspective'])
+
+
+ #img, labels = self.albumentations(img, labels)
+
+ # Augment colorspace
+ augment_hsv(img, hgain=hyp['hsv_h'], sgain=hyp['hsv_s'], vgain=hyp['hsv_v'])
+
+ # Apply cutouts
+ # if random.random() < 0.9:
+ # labels = cutout(img, labels)
+
+ if random.random() < hyp['paste_in']:
+ sample_labels, sample_images, sample_masks = [], [], []
+ while len(sample_labels) < 30:
+ sample_labels_, sample_images_, sample_masks_ = load_samples(self, random.randint(0, len(self.labels) - 1))
+ sample_labels += sample_labels_
+ sample_images += sample_images_
+ sample_masks += sample_masks_
+ #print(len(sample_labels))
+ if len(sample_labels) == 0:
+ break
+ labels = pastein(img, labels, sample_labels, sample_images, sample_masks)
+
+ nL = len(labels) # number of labels
+ if nL:
+ labels[:, 1:5] = xyxy2xywh(labels[:, 1:5]) # convert xyxy to xywh
+ labels[:, [2, 4]] /= img.shape[0] # normalized height 0-1
+ labels[:, [1, 3]] /= img.shape[1] # normalized width 0-1
+
+ if self.augment:
+ # flip up-down
+ if random.random() < hyp['flipud']:
+ img = np.flipud(img)
+ if nL:
+ labels[:, 2] = 1 - labels[:, 2]
+
+ # flip left-right
+ if random.random() < hyp['fliplr']:
+ img = np.fliplr(img)
+ if nL:
+ labels[:, 1] = 1 - labels[:, 1]
+
+ labels_out = torch.zeros((nL, 6))
+ if nL:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return torch.from_numpy(img), labels_out, self.img_files[index], shapes
+
+ @staticmethod
+ def collate_fn(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ for i, l in enumerate(label):
+ l[:, 0] = i # add target image index for build_targets()
+ return torch.stack(img, 0), torch.cat(label, 0), path, shapes
+
+ @staticmethod
+ def collate_fn4(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ n = len(shapes) // 4
+ img4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
+
+ ho = torch.tensor([[0., 0, 0, 1, 0, 0]])
+ wo = torch.tensor([[0., 0, 1, 0, 0, 0]])
+ s = torch.tensor([[1, 1, .5, .5, .5, .5]]) # scale
+ for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
+ i *= 4
+ if random.random() < 0.5:
+ im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2., mode='bilinear', align_corners=False)[
+ 0].type(img[i].type())
+ l = label[i]
+ else:
+ im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
+ l = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
+ img4.append(im)
+ label4.append(l)
+
+ for i, l in enumerate(label4):
+ l[:, 0] = i # add target image index for build_targets()
+
+ return torch.stack(img4, 0), torch.cat(label4, 0), path4, shapes4
+
+
+# Ancillary functions --------------------------------------------------------------------------------------------------
+def load_image(self, index):
+ # loads 1 image from dataset, returns img, original hw, resized hw
+ img = self.imgs[index]
+ if img is None: # not cached
+ path = self.img_files[index]
+ if "\\" in path:
+ path = path.replace("\\", "/")
+ path = path.replace("\t", "/t")
+ img = cv2.imread(path) # BGR
+ assert img is not None, 'Image Not Found ' + path
+ h0, w0 = img.shape[:2] # orig hw
+ r = self.img_size / max(h0, w0) # resize image to img_size
+ if r != 1: # always resize down, only resize up if training with augmentation
+ interp = cv2.INTER_AREA if r < 1 and not self.augment else cv2.INTER_LINEAR
+ img = cv2.resize(img, (int(w0 * r), int(h0 * r)), interpolation=interp)
+ return img, (h0, w0), img.shape[:2] # img, hw_original, hw_resized
+ else:
+ return self.imgs[index], self.img_hw0[index], self.img_hw[index] # img, hw_original, hw_resized
+
+
+def augment_hsv(img, hgain=0.5, sgain=0.5, vgain=0.5):
+ r = np.random.uniform(-1, 1, 3) * [hgain, sgain, vgain] + 1 # random gains
+ hue, sat, val = cv2.split(cv2.cvtColor(img, cv2.COLOR_BGR2HSV))
+ dtype = img.dtype # uint8
+
+ x = np.arange(0, 256, dtype=np.int16)
+ lut_hue = ((x * r[0]) % 180).astype(dtype)
+ lut_sat = np.clip(x * r[1], 0, 255).astype(dtype)
+ lut_val = np.clip(x * r[2], 0, 255).astype(dtype)
+
+ img_hsv = cv2.merge((cv2.LUT(hue, lut_hue), cv2.LUT(sat, lut_sat), cv2.LUT(val, lut_val))).astype(dtype)
+ cv2.cvtColor(img_hsv, cv2.COLOR_HSV2BGR, dst=img) # no return needed
+
+
+def hist_equalize(img, clahe=True, bgr=False):
+ # Equalize histogram on BGR image 'img' with img.shape(n,m,3) and range 0-255
+ yuv = cv2.cvtColor(img, cv2.COLOR_BGR2YUV if bgr else cv2.COLOR_RGB2YUV)
+ if clahe:
+ c = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
+ yuv[:, :, 0] = c.apply(yuv[:, :, 0])
+ else:
+ yuv[:, :, 0] = cv2.equalizeHist(yuv[:, :, 0]) # equalize Y channel histogram
+ return cv2.cvtColor(yuv, cv2.COLOR_YUV2BGR if bgr else cv2.COLOR_YUV2RGB) # convert YUV image to RGB
+
+
+def load_mosaic(self, index):
+ # loads images in a 4-mosaic
+
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ #img4, labels4, segments4 = remove_background(img4, labels4, segments4)
+ #sample_segments(img4, labels4, segments4, probability=self.hyp['copy_paste'])
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, probability=self.hyp['copy_paste'])
+ img4, labels4 = random_perspective(img4, labels4, segments4,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img4, labels4
+
+
+def load_mosaic9(self, index):
+ # loads images in a 9-mosaic
+
+ labels9, segments9 = [], []
+ s = self.img_size
+ indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img9
+ if i == 0: # center
+ img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ h0, w0 = h, w
+ c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
+ elif i == 1: # top
+ c = s, s - h, s + w, s
+ elif i == 2: # top right
+ c = s + wp, s - h, s + wp + w, s
+ elif i == 3: # right
+ c = s + w0, s, s + w0 + w, s + h
+ elif i == 4: # bottom right
+ c = s + w0, s + hp, s + w0 + w, s + hp + h
+ elif i == 5: # bottom
+ c = s + w0 - w, s + h0, s + w0, s + h0 + h
+ elif i == 6: # bottom left
+ c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
+ elif i == 7: # left
+ c = s - w, s + h0 - h, s, s + h0
+ elif i == 8: # top left
+ c = s - w, s + h0 - hp - h, s, s + h0 - hp
+
+ padx, pady = c[:2]
+ x1, y1, x2, y2 = [max(x, 0) for x in c] # allocate coords
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
+ labels9.append(labels)
+ segments9.extend(segments)
+
+ # Image
+ img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
+ hp, wp = h, w # height, width previous
+
+ # Offset
+ yc, xc = [int(random.uniform(0, s)) for _ in self.mosaic_border] # mosaic center x, y
+ img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
+
+ # Concat/clip labels
+ labels9 = np.concatenate(labels9, 0)
+ labels9[:, [1, 3]] -= xc
+ labels9[:, [2, 4]] -= yc
+ c = np.array([xc, yc]) # centers
+ segments9 = [x - c for x in segments9]
+
+ for x in (labels9[:, 1:], *segments9):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img9, labels9 = replicate(img9, labels9) # replicate
+
+ # Augment
+ #img9, labels9, segments9 = remove_background(img9, labels9, segments9)
+ img9, labels9, segments9 = copy_paste(img9, labels9, segments9, probability=self.hyp['copy_paste'])
+ img9, labels9 = random_perspective(img9, labels9, segments9,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img9, labels9
+
+
+def load_samples(self, index):
+ # loads images in a 4-mosaic
+
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ #img4, labels4, segments4 = remove_background(img4, labels4, segments4)
+ sample_labels, sample_images, sample_masks = sample_segments(img4, labels4, segments4, probability=0.5)
+
+ return sample_labels, sample_images, sample_masks
+
+
+def copy_paste(img, labels, segments, probability=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ if probability and n:
+ h, w, c = img.shape # height, width, channels
+ im_new = np.zeros(img.shape, np.uint8)
+ for j in random.sample(range(n), k=round(probability * n)):
+ l, s = labels[j], segments[j]
+ box = w - l[3], l[2], w - l[1], l[4]
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
+ labels = np.concatenate((labels, [[l[0], *box]]), 0)
+ segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=img, src2=im_new)
+ result = cv2.flip(result, 1) # augment segments (flip left-right)
+ i = result > 0 # pixels to replace
+ # i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
+ img[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+
+ return img, labels, segments
+
+
+def remove_background(img, labels, segments):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ h, w, c = img.shape # height, width, channels
+ im_new = np.zeros(img.shape, np.uint8)
+ img_new = np.ones(img.shape, np.uint8) * 114
+ for j in range(n):
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=img, src2=im_new)
+
+ i = result > 0 # pixels to replace
+ img_new[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+
+ return img_new, labels, segments
+
+
+def sample_segments(img, labels, segments, probability=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ sample_labels = []
+ sample_images = []
+ sample_masks = []
+ if probability and n:
+ h, w, c = img.shape # height, width, channels
+ for j in random.sample(range(n), k=round(probability * n)):
+ l, s = labels[j], segments[j]
+ box = l[1].astype(int).clip(0,w-1), l[2].astype(int).clip(0,h-1), l[3].astype(int).clip(0,w-1), l[4].astype(int).clip(0,h-1)
+
+ #print(box)
+ if (box[2] <= box[0]) or (box[3] <= box[1]):
+ continue
+
+ sample_labels.append(l[0])
+
+ mask = np.zeros(img.shape, np.uint8)
+
+ cv2.drawContours(mask, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+ sample_masks.append(mask[box[1]:box[3],box[0]:box[2],:])
+
+ result = cv2.bitwise_and(src1=img, src2=mask)
+ i = result > 0 # pixels to replace
+ mask[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+ #print(box)
+ sample_images.append(mask[box[1]:box[3],box[0]:box[2],:])
+
+ return sample_labels, sample_images, sample_masks
+
+
+def replicate(img, labels):
+ # Replicate labels
+ h, w = img.shape[:2]
+ boxes = labels[:, 1:].astype(int)
+ x1, y1, x2, y2 = boxes.T
+ s = ((x2 - x1) + (y2 - y1)) / 2 # side length (pixels)
+ for i in s.argsort()[:round(s.size * 0.5)]: # smallest indices
+ x1b, y1b, x2b, y2b = boxes[i]
+ bh, bw = y2b - y1b, x2b - x1b
+ yc, xc = int(random.uniform(0, h - bh)), int(random.uniform(0, w - bw)) # offset x, y
+ x1a, y1a, x2a, y2a = [xc, yc, xc + bw, yc + bh]
+ img[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ labels = np.append(labels, [[labels[i, 0], x1a, y1a, x2a, y2a]], axis=0)
+
+ return img, labels
+
+
+def letterbox(img, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
+ # Resize and pad image while meeting stride-multiple constraints
+ shape = img.shape[:2] # current shape [height, width]
+ if isinstance(new_shape, int):
+ new_shape = (new_shape, new_shape)
+
+ # Scale ratio (new / old)
+ r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
+ if not scaleup: # only scale down, do not scale up (for better test mAP)
+ r = min(r, 1.0)
+
+ # Compute padding
+ ratio = r, r # width, height ratios
+ new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
+ dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
+ if auto: # minimum rectangle
+ dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
+ elif scaleFill: # stretch
+ dw, dh = 0.0, 0.0
+ new_unpad = (new_shape[1], new_shape[0])
+ ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
+
+ dw /= 2 # divide padding into 2 sides
+ dh /= 2
+
+ if shape[::-1] != new_unpad: # resize
+ img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
+ top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
+ left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
+ img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
+ return img, ratio, (dw, dh)
+
+
+def random_perspective(img, targets=(), segments=(), degrees=10, translate=.1, scale=.1, shear=10, perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = img.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = img.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -img.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -img.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1.1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
+ T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ img = cv2.warpPerspective(img, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ img = cv2.warpAffine(img, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(img[:, :, ::-1]) # base
+ # ax[1].imshow(img2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ if n:
+ use_segments = any(x.any() for x in segments)
+ new = np.zeros((n, 4))
+ if use_segments: # warp segments
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+
+ else: # warp boxes
+ xy = np.ones((n * 4, 3))
+ xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
+
+ # create new boxes
+ x = xy[:, [0, 2, 4, 6]]
+ y = xy[:, [1, 3, 5, 7]]
+ new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
+
+ # clip
+ new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
+ new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+
+ return img, targets
+
+
+def box_candidates(box1, box2, wh_thr=2, ar_thr=20, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
+ # Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
+ w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
+ w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
+ ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
+ return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
+
+
+def bbox_ioa(box1, box2):
+ # Returns the intersection over box2 area given box1, box2. box1 is 4, box2 is nx4. boxes are x1y1x2y2
+ box2 = box2.transpose()
+
+ # Get the coordinates of bounding boxes
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+
+ # Intersection area
+ inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
+ (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)
+
+ # box2 area
+ box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + 1e-16
+
+ # Intersection over box2 area
+ return inter_area / box2_area
+
+
+def cutout(image, labels):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ h, w = image.shape[:2]
+
+ # create random masks
+ scales = [0.5] * 1 + [0.25] * 2 + [0.125] * 4 + [0.0625] * 8 + [0.03125] * 16 # image size fraction
+ for s in scales:
+ mask_h = random.randint(1, int(h * s))
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ # apply random color mask
+ image[ymin:ymax, xmin:xmax] = [random.randint(64, 191) for _ in range(3)]
+
+ # return unobscured labels
+ if len(labels) and s > 0.03:
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ labels = labels[ioa < 0.60] # remove >60% obscured labels
+
+ return labels
+
+
+def pastein(image, labels, sample_labels, sample_images, sample_masks):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ h, w = image.shape[:2]
+
+ # create random masks
+ scales = [0.75] * 2 + [0.5] * 4 + [0.25] * 4 + [0.125] * 4 + [0.0625] * 6 # image size fraction
+ for s in scales:
+ if random.random() < 0.2:
+ continue
+ mask_h = random.randint(1, int(h * s))
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ if len(labels):
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ else:
+ ioa = np.zeros(1)
+
+ if (ioa < 0.30).all() and len(sample_labels) and (xmax > xmin+20) and (ymax > ymin+20): # allow 30% obscuration of existing labels
+ sel_ind = random.randint(0, len(sample_labels)-1)
+ #print(len(sample_labels))
+ #print(sel_ind)
+ #print((xmax-xmin, ymax-ymin))
+ #print(image[ymin:ymax, xmin:xmax].shape)
+ #print([[sample_labels[sel_ind], *box]])
+ #print(labels.shape)
+ hs, ws, cs = sample_images[sel_ind].shape
+ r_scale = min((ymax-ymin)/hs, (xmax-xmin)/ws)
+ r_w = int(ws*r_scale)
+ r_h = int(hs*r_scale)
+
+ if (r_w > 10) and (r_h > 10):
+ r_mask = cv2.resize(sample_masks[sel_ind], (r_w, r_h))
+ r_image = cv2.resize(sample_images[sel_ind], (r_w, r_h))
+ temp_crop = image[ymin:ymin+r_h, xmin:xmin+r_w]
+ m_ind = r_mask > 0
+ if m_ind.astype(np.int32).sum() > 60:
+ temp_crop[m_ind] = r_image[m_ind]
+ #print(sample_labels[sel_ind])
+ #print(sample_images[sel_ind].shape)
+ #print(temp_crop.shape)
+ box = np.array([xmin, ymin, xmin+r_w, ymin+r_h], dtype=np.float32)
+ if len(labels):
+ labels = np.concatenate((labels, [[sample_labels[sel_ind], *box]]), 0)
+ else:
+ labels = np.array([[sample_labels[sel_ind], *box]])
+
+ image[ymin:ymin+r_h, xmin:xmin+r_w] = temp_crop
+
+ return labels
+
+class Albumentations:
+ # YOLOv5 Albumentations class (optional, only used if package is installed)
+ def __init__(self):
+ self.transform = None
+ import albumentations as A
+
+ self.transform = A.Compose([
+ A.CLAHE(p=0.01),
+ A.RandomBrightnessContrast(brightness_limit=0.2, contrast_limit=0.2, p=0.01),
+ A.RandomGamma(gamma_limit=[80, 120], p=0.01),
+ A.Blur(p=0.01),
+ A.MedianBlur(p=0.01),
+ A.ToGray(p=0.01),
+ A.ImageCompression(quality_lower=75, p=0.01),],
+ bbox_params=A.BboxParams(format='pascal_voc', label_fields=['class_labels']))
+
+ #logging.info(colorstr('albumentations: ') + ', '.join(f'{x}' for x in self.transform.transforms if x.p))
+
+ def __call__(self, im, labels, p=1.0):
+ if self.transform and random.random() < p:
+ new = self.transform(image=im, bboxes=labels[:, 1:], class_labels=labels[:, 0]) # transformed
+ im, labels = new['image'], np.array([[c, *b] for c, b in zip(new['class_labels'], new['bboxes'])])
+ return im, labels
+
+
+def create_folder(path='./new'):
+ # Create folder
+ if os.path.exists(path):
+ shutil.rmtree(path) # delete output folder
+ os.makedirs(path) # make new output folder
+
+
+def flatten_recursive(path='../coco'):
+ # Flatten a recursive directory by bringing all files to top level
+ new_path = Path(path + '_flat')
+ create_folder(new_path)
+ for file in tqdm(glob.glob(str(Path(path)) + '/**/*.*', recursive=True)):
+ shutil.copyfile(file, new_path / Path(file).name)
+
+
+def extract_boxes(path='../coco/'): # from utils.datasets import *; extract_boxes('../coco128')
+ # Convert detection dataset into classification dataset, with one directory per class
+
+ path = Path(path) # images dir
+ shutil.rmtree(path / 'classifier') if (path / 'classifier').is_dir() else None # remove existing
+ files = list(path.rglob('*.*'))
+ n = len(files) # number of files
+ for im_file in tqdm(files, total=n):
+ if im_file.suffix[1:] in img_formats:
+ # image
+ im = cv2.imread(str(im_file))[..., ::-1] # BGR to RGB
+ h, w = im.shape[:2]
+
+ # labels
+ lb_file = Path(img2label_paths([str(im_file)])[0])
+ if Path(lb_file).exists():
+ with open(lb_file, 'r') as f:
+ lb = np.array([x.split() for x in f.read().strip().splitlines()], dtype=np.float32) # labels
+
+ for j, x in enumerate(lb):
+ c = int(x[0]) # class
+ f = (path / 'classifier') / f'{c}' / f'{path.stem}_{im_file.stem}_{j}.jpg' # new filename
+ if not f.parent.is_dir():
+ f.parent.mkdir(parents=True)
+
+ b = x[1:] * [w, h, w, h] # box
+ # b[2:] = b[2:].max() # rectangle to square
+ b[2:] = b[2:] * 1.2 + 3 # pad
+ b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
+
+ b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
+ b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
+ assert cv2.imwrite(str(f), im[b[1]:b[3], b[0]:b[2]]), f'box failure in {f}'
+
+
+def autosplit(path='../coco', weights=(0.9, 0.1, 0.0), annotated_only=False):
+ """ Autosplit a dataset into train/val/test splits and save path/autosplit_*.txt files
+ Usage: from utils.datasets import *; autosplit('../coco')
+ Arguments
+ path: Path to images directory
+ weights: Train, val, test weights (list)
+ annotated_only: Only use images with an annotated txt file
+ """
+ path = Path(path) # images dir
+ files = sum([list(path.rglob(f"*.{img_ext}")) for img_ext in img_formats], []) # image files only
+ n = len(files) # number of files
+ indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
+
+ txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
+ [(path / x).unlink() for x in txt if (path / x).exists()] # remove existing
+
+ print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
+ for i, img in tqdm(zip(indices, files), total=n):
+ if not annotated_only or Path(img2label_paths([str(img)])[0]).exists(): # check label
+ with open(path / txt[i], 'a') as f:
+ f.write(str(img) + '\n') # add image to txt file
+
+
+def load_segmentations(self, index):
+ key = '/work/handsomejw66/coco17/' + self.img_files[index]
+ #print(key)
+ # /work/handsomejw66/coco17/
+ return self.segs[key]
diff --git a/ipex/utils/general.py b/ipex/utils/general.py
new file mode 100644
index 000000000..decdcc64e
--- /dev/null
+++ b/ipex/utils/general.py
@@ -0,0 +1,892 @@
+# YOLOR general utils
+
+import glob
+import logging
+import math
+import os
+import platform
+import random
+import re
+import subprocess
+import time
+from pathlib import Path
+
+import cv2
+import numpy as np
+import pandas as pd
+import torch
+import torchvision
+import yaml
+
+from utils.google_utils import gsutil_getsize
+from utils.metrics import fitness
+from utils.torch_utils import init_torch_seeds
+
+# Settings
+torch.set_printoptions(linewidth=320, precision=5, profile='long')
+np.set_printoptions(linewidth=320, formatter={'float_kind': '{:11.5g}'.format}) # format short g, %precision=5
+pd.options.display.max_columns = 10
+cv2.setNumThreads(0) # prevent OpenCV from multithreading (incompatible with PyTorch DataLoader)
+os.environ['NUMEXPR_MAX_THREADS'] = str(min(os.cpu_count(), 8)) # NumExpr max threads
+
+
+def set_logging(rank=-1):
+ logging.basicConfig(
+ format="%(message)s",
+ level=logging.INFO if rank in [-1, 0] else logging.WARN)
+
+
+def init_seeds(seed=0):
+ # Initialize random number generator (RNG) seeds
+ random.seed(seed)
+ np.random.seed(seed)
+ init_torch_seeds(seed)
+
+
+def get_latest_run(search_dir='.'):
+ # Return path to most recent 'last.pt' in /runs (i.e. to --resume from)
+ last_list = glob.glob(f'{search_dir}/**/last*.pt', recursive=True)
+ return max(last_list, key=os.path.getctime) if last_list else ''
+
+
+def isdocker():
+ # Is environment a Docker container
+ return Path('/workspace').exists() # or Path('/.dockerenv').exists()
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+def check_online():
+ # Check internet connectivity
+ import socket
+ try:
+ socket.create_connection(("1.1.1.1", 443), 5) # check host accesability
+ return True
+ except OSError:
+ return False
+
+
+def check_git_status():
+ # Recommend 'git pull' if code is out of date
+ print(colorstr('github: '), end='')
+ try:
+ assert Path('.git').exists(), 'skipping check (not a git repository)'
+ assert not isdocker(), 'skipping check (Docker image)'
+ assert check_online(), 'skipping check (offline)'
+
+ cmd = 'git fetch && git config --get remote.origin.url'
+ url = subprocess.check_output(cmd, shell=True).decode().strip().rstrip('.git') # github repo url
+ branch = subprocess.check_output('git rev-parse --abbrev-ref HEAD', shell=True).decode().strip() # checked out
+ n = int(subprocess.check_output(f'git rev-list {branch}..origin/master --count', shell=True)) # commits behind
+ if n > 0:
+ s = f"⚠️ WARNING: code is out of date by {n} commit{'s' * (n > 1)}. " \
+ f"Use 'git pull' to update or 'git clone {url}' to download latest."
+ else:
+ s = f'up to date with {url} ✅'
+ print(emojis(s)) # emoji-safe
+ except Exception as e:
+ print(e)
+
+
+def check_requirements(requirements='requirements.txt', exclude=()):
+ # Check installed dependencies meet requirements (pass *.txt file or list of packages)
+ import pkg_resources as pkg
+ prefix = colorstr('red', 'bold', 'requirements:')
+ if isinstance(requirements, (str, Path)): # requirements.txt file
+ file = Path(requirements)
+ if not file.exists():
+ print(f"{prefix} {file.resolve()} not found, check failed.")
+ return
+ requirements = [f'{x.name}{x.specifier}' for x in pkg.parse_requirements(file.open()) if x.name not in exclude]
+ else: # list or tuple of packages
+ requirements = [x for x in requirements if x not in exclude]
+
+ n = 0 # number of packages updates
+ for r in requirements:
+ try:
+ pkg.require(r)
+ except Exception as e: # DistributionNotFound or VersionConflict if requirements not met
+ n += 1
+ print(f"{prefix} {e.req} not found and is required by YOLOR, attempting auto-update...")
+ print(subprocess.check_output(f"pip install '{e.req}'", shell=True).decode())
+
+ if n: # if packages updated
+ source = file.resolve() if 'file' in locals() else requirements
+ s = f"{prefix} {n} package{'s' * (n > 1)} updated per {source}\n" \
+ f"{prefix} ⚠️ {colorstr('bold', 'Restart runtime or rerun command for updates to take effect')}\n"
+ print(emojis(s)) # emoji-safe
+
+
+def check_img_size(img_size, s=32):
+ # Verify img_size is a multiple of stride s
+ new_size = make_divisible(img_size, int(s)) # ceil gs-multiple
+ if new_size != img_size:
+ print('WARNING: --img-size %g must be multiple of max stride %g, updating to %g' % (img_size, s, new_size))
+ return new_size
+
+
+def check_imshow():
+ # Check if environment supports image displays
+ try:
+ assert not isdocker(), 'cv2.imshow() is disabled in Docker environments'
+ cv2.imshow('test', np.zeros((1, 1, 3)))
+ cv2.waitKey(1)
+ cv2.destroyAllWindows()
+ cv2.waitKey(1)
+ return True
+ except Exception as e:
+ print(f'WARNING: Environment does not support cv2.imshow() or PIL Image.show() image displays\n{e}')
+ return False
+
+
+def check_file(file):
+ # Search for file if not found
+ if Path(file).is_file() or file == '':
+ return file
+ else:
+ files = glob.glob('./**/' + file, recursive=True) # find file
+ assert len(files), f'File Not Found: {file}' # assert file was found
+ assert len(files) == 1, f"Multiple files match '{file}', specify exact path: {files}" # assert unique
+ return files[0] # return file
+
+
+def check_dataset(dict):
+ # Download dataset if not found locally
+ val, s = dict.get('val'), dict.get('download')
+ if val and len(val):
+ val = [Path(x).resolve() for x in (val if isinstance(val, list) else [val])] # val path
+ if not all(x.exists() for x in val):
+ print('\nWARNING: Dataset not found, nonexistent paths: %s' % [str(x) for x in val if not x.exists()])
+ if s and len(s): # download script
+ print('Downloading %s ...' % s)
+ if s.startswith('http') and s.endswith('.zip'): # URL
+ f = Path(s).name # filename
+ torch.hub.download_url_to_file(s, f)
+ r = os.system('unzip -q %s -d ../ && rm %s' % (f, f)) # unzip
+ else: # bash script
+ r = os.system(s)
+ print('Dataset autodownload %s\n' % ('success' if r == 0 else 'failure')) # analyze return value
+ else:
+ raise Exception('Dataset not found.')
+
+
+def make_divisible(x, divisor):
+ # Returns x evenly divisible by divisor
+ return math.ceil(x / divisor) * divisor
+
+
+def clean_str(s):
+ # Cleans a string by replacing special characters with underscore _
+ return re.sub(pattern="[|@#!¡·$€%&()=?¿^*;:,¨´><+]", repl="_", string=s)
+
+
+def one_cycle(y1=0.0, y2=1.0, steps=100):
+ # lambda function for sinusoidal ramp from y1 to y2
+ return lambda x: ((1 - math.cos(x * math.pi / steps)) / 2) * (y2 - y1) + y1
+
+
+def colorstr(*input):
+ # Colors a string https://en.wikipedia.org/wiki/ANSI_escape_code, i.e. colorstr('blue', 'hello world')
+ *args, string = input if len(input) > 1 else ('blue', 'bold', input[0]) # color arguments, string
+ colors = {'black': '\033[30m', # basic colors
+ 'red': '\033[31m',
+ 'green': '\033[32m',
+ 'yellow': '\033[33m',
+ 'blue': '\033[34m',
+ 'magenta': '\033[35m',
+ 'cyan': '\033[36m',
+ 'white': '\033[37m',
+ 'bright_black': '\033[90m', # bright colors
+ 'bright_red': '\033[91m',
+ 'bright_green': '\033[92m',
+ 'bright_yellow': '\033[93m',
+ 'bright_blue': '\033[94m',
+ 'bright_magenta': '\033[95m',
+ 'bright_cyan': '\033[96m',
+ 'bright_white': '\033[97m',
+ 'end': '\033[0m', # misc
+ 'bold': '\033[1m',
+ 'underline': '\033[4m'}
+ return ''.join(colors[x] for x in args) + f'{string}' + colors['end']
+
+
+def labels_to_class_weights(labels, nc=80):
+ # Get class weights (inverse frequency) from training labels
+ if labels[0] is None: # no labels loaded
+ return torch.Tensor()
+
+ labels = np.concatenate(labels, 0) # labels.shape = (866643, 5) for COCO
+ classes = labels[:, 0].astype(np.int32) # labels = [class xywh]
+ weights = np.bincount(classes, minlength=nc) # occurrences per class
+
+ # Prepend gridpoint count (for uCE training)
+ # gpi = ((320 / 32 * np.array([1, 2, 4])) ** 2 * 3).sum() # gridpoints per image
+ # weights = np.hstack([gpi * len(labels) - weights.sum() * 9, weights * 9]) ** 0.5 # prepend gridpoints to start
+
+ weights[weights == 0] = 1 # replace empty bins with 1
+ weights = 1 / weights # number of targets per class
+ weights /= weights.sum() # normalize
+ return torch.from_numpy(weights)
+
+
+def labels_to_image_weights(labels, nc=80, class_weights=np.ones(80)):
+ # Produces image weights based on class_weights and image contents
+ class_counts = np.array([np.bincount(x[:, 0].astype(np.int32), minlength=nc) for x in labels])
+ image_weights = (class_weights.reshape(1, nc) * class_counts).sum(1)
+ # index = random.choices(range(n), weights=image_weights, k=1) # weight image sample
+ return image_weights
+
+
+def coco80_to_coco91_class(): # converts 80-index (val2014) to 91-index (paper)
+ # https://tech.amikelive.com/node-718/what-object-categories-labels-are-in-coco-dataset/
+ # a = np.loadtxt('data/coco.names', dtype='str', delimiter='\n')
+ # b = np.loadtxt('data/coco_paper.names', dtype='str', delimiter='\n')
+ # x1 = [list(a[i] == b).index(True) + 1 for i in range(80)] # darknet to coco
+ # x2 = [list(b[i] == a).index(True) if any(b[i] == a) else None for i in range(91)] # coco to darknet
+ x = [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 27, 28, 31, 32, 33, 34,
+ 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63,
+ 64, 65, 67, 70, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 84, 85, 86, 87, 88, 89, 90]
+ return x
+
+
+def xyxy2xywh(x):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = (x[:, 0] + x[:, 2]) / 2 # x center
+ y[:, 1] = (x[:, 1] + x[:, 3]) / 2 # y center
+ y[:, 2] = x[:, 2] - x[:, 0] # width
+ y[:, 3] = x[:, 3] - x[:, 1] # height
+ return y
+
+
+def xywh2xyxy(x):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
+ y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
+ y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
+ y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
+ return y
+
+
+def xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):
+ # Convert nx4 boxes from [x, y, w, h] normalized to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * (x[:, 0] - x[:, 2] / 2) + padw # top left x
+ y[:, 1] = h * (x[:, 1] - x[:, 3] / 2) + padh # top left y
+ y[:, 2] = w * (x[:, 0] + x[:, 2] / 2) + padw # bottom right x
+ y[:, 3] = h * (x[:, 1] + x[:, 3] / 2) + padh # bottom right y
+ return y
+
+
+def xyn2xy(x, w=640, h=640, padw=0, padh=0):
+ # Convert normalized segments into pixel segments, shape (n,2)
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * x[:, 0] + padw # top left x
+ y[:, 1] = h * x[:, 1] + padh # top left y
+ return y
+
+
+def segment2box(segment, width=640, height=640):
+ # Convert 1 segment label to 1 box label, applying inside-image constraint, i.e. (xy1, xy2, ...) to (xyxy)
+ x, y = segment.T # segment xy
+ inside = (x >= 0) & (y >= 0) & (x <= width) & (y <= height)
+ x, y, = x[inside], y[inside]
+ return np.array([x.min(), y.min(), x.max(), y.max()]) if any(x) else np.zeros((1, 4)) # xyxy
+
+
+def segments2boxes(segments):
+ # Convert segment labels to box labels, i.e. (cls, xy1, xy2, ...) to (cls, xywh)
+ boxes = []
+ for s in segments:
+ x, y = s.T # segment xy
+ boxes.append([x.min(), y.min(), x.max(), y.max()]) # cls, xyxy
+ return xyxy2xywh(np.array(boxes)) # cls, xywh
+
+
+def resample_segments(segments, n=1000):
+ # Up-sample an (n,2) segment
+ for i, s in enumerate(segments):
+ s = np.concatenate((s, s[0:1, :]), axis=0)
+ x = np.linspace(0, len(s) - 1, n)
+ xp = np.arange(len(s))
+ segments[i] = np.concatenate([np.interp(x, xp, s[:, i]) for i in range(2)]).reshape(2, -1).T # segment xy
+ return segments
+
+
+def scale_coords(img1_shape, coords, img0_shape, ratio_pad=None):
+ # Rescale coords (xyxy) from img1_shape to img0_shape
+ if ratio_pad is None: # calculate from img0_shape
+ gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
+ pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
+ else:
+ gain = ratio_pad[0][0]
+ pad = ratio_pad[1]
+
+ coords[:, [0, 2]] -= pad[0] # x padding
+ coords[:, [1, 3]] -= pad[1] # y padding
+ coords[:, :4] /= gain
+ clip_coords(coords, img0_shape)
+ return coords
+
+
+def clip_coords(boxes, img_shape):
+ # Clip bounding xyxy bounding boxes to image shape (height, width)
+ boxes[:, 0].clamp_(0, img_shape[1]) # x1
+ boxes[:, 1].clamp_(0, img_shape[0]) # y1
+ boxes[:, 2].clamp_(0, img_shape[1]) # x2
+ boxes[:, 3].clamp_(0, img_shape[0]) # y2
+
+
+def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
+ box2 = box2.T
+
+ # Get the coordinates of bounding boxes
+ if x1y1x2y2: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ else: # transform from xywh to xyxy
+ b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
+ b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
+ b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
+ b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ iou = inter / union
+
+ if GIoU or DIoU or CIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
+ (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
+ if DIoU:
+ return iou - rho2 / c2 # DIoU
+ elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
+ with torch.no_grad():
+ alpha = v / (v - iou + (1 + eps))
+ return iou - (rho2 / c2 + v * alpha) # CIoU
+ else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ c_area = cw * ch + eps # convex area
+ return iou - (c_area - union) / c_area # GIoU
+ else:
+ return iou # IoU
+
+
+
+
+def bbox_alpha_iou(box1, box2, x1y1x2y2=False, GIoU=False, DIoU=False, CIoU=False, alpha=2, eps=1e-9):
+ # Returns tsqrt_he IoU of box1 to box2. box1 is 4, box2 is nx4
+ box2 = box2.T
+
+ # Get the coordinates of bounding boxes
+ if x1y1x2y2: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ else: # transform from xywh to xyxy
+ b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
+ b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
+ b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
+ b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ # change iou into pow(iou+eps)
+ # iou = inter / union
+ iou = torch.pow(inter/union + eps, alpha)
+ # beta = 2 * alpha
+ if GIoU or DIoU or CIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal
+ rho_x = torch.abs(b2_x1 + b2_x2 - b1_x1 - b1_x2)
+ rho_y = torch.abs(b2_y1 + b2_y2 - b1_y1 - b1_y2)
+ rho2 = ((rho_x ** 2 + rho_y ** 2) / 4) ** alpha # center distance
+ if DIoU:
+ return iou - rho2 / c2 # DIoU
+ elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
+ with torch.no_grad():
+ alpha_ciou = v / ((1 + eps) - inter / union + v)
+ # return iou - (rho2 / c2 + v * alpha_ciou) # CIoU
+ return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
+ else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ # c_area = cw * ch + eps # convex area
+ # return iou - (c_area - union) / c_area # GIoU
+ c_area = torch.max(cw * ch + eps, union) # convex area
+ return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU
+ else:
+ return iou # torch.log(iou+eps) or iou
+
+
+def box_iou(box1, box2):
+ # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ box1 (Tensor[N, 4])
+ box2 (Tensor[M, 4])
+ Returns:
+ iou (Tensor[N, M]): the NxM matrix containing the pairwise
+ IoU values for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ return inter / (area1[:, None] + area2 - inter) # iou = inter / (area1 + area2 - inter)
+
+
+def wh_iou(wh1, wh2):
+ # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
+ wh1 = wh1[:, None] # [N,1,2]
+ wh2 = wh2[None] # [1,M,2]
+ inter = torch.min(wh1, wh2).prod(2) # [N,M]
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter) # iou = inter / (area1 + area2 - inter)
+
+
+def box_giou(box1, box2):
+ """
+ Return generalized intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise generalized IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ areai = whi[:, :, 0] * whi[:, :, 1]
+
+ return iou - (areai - union) / areai
+
+
+def box_ciou(box1, box2, eps: float = 1e-7):
+ """
+ Return complete intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ eps (float, optional): small number to prevent division by zero. Default: 1e-7
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise complete IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ diagonal_distance_squared = (whi[:, :, 0] ** 2) + (whi[:, :, 1] ** 2) + eps
+
+ # centers of boxes
+ x_p = (box1[:, None, 0] + box1[:, None, 2]) / 2
+ y_p = (box1[:, None, 1] + box1[:, None, 3]) / 2
+ x_g = (box2[:, 0] + box2[:, 2]) / 2
+ y_g = (box2[:, 1] + box2[:, 3]) / 2
+ # The distance between boxes' centers squared.
+ centers_distance_squared = (x_p - x_g) ** 2 + (y_p - y_g) ** 2
+
+ w_pred = box1[:, None, 2] - box1[:, None, 0]
+ h_pred = box1[:, None, 3] - box1[:, None, 1]
+
+ w_gt = box2[:, 2] - box2[:, 0]
+ h_gt = box2[:, 3] - box2[:, 1]
+
+ v = (4 / (torch.pi ** 2)) * torch.pow((torch.atan(w_gt / h_gt) - torch.atan(w_pred / h_pred)), 2)
+ with torch.no_grad():
+ alpha = v / (1 - iou + v + eps)
+ return iou - (centers_distance_squared / diagonal_distance_squared) - alpha * v
+
+
+def box_diou(box1, box2, eps: float = 1e-7):
+ """
+ Return distance intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ eps (float, optional): small number to prevent division by zero. Default: 1e-7
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise distance IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ diagonal_distance_squared = (whi[:, :, 0] ** 2) + (whi[:, :, 1] ** 2) + eps
+
+ # centers of boxes
+ x_p = (box1[:, None, 0] + box1[:, None, 2]) / 2
+ y_p = (box1[:, None, 1] + box1[:, None, 3]) / 2
+ x_g = (box2[:, 0] + box2[:, 2]) / 2
+ y_g = (box2[:, 1] + box2[:, 3]) / 2
+ # The distance between boxes' centers squared.
+ centers_distance_squared = (x_p - x_g) ** 2 + (y_p - y_g) ** 2
+
+ # The distance IoU is the IoU penalized by a normalized
+ # distance between boxes' centers squared.
+ return iou - (centers_distance_squared / diagonal_distance_squared)
+
+
+def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
+ labels=()):
+ """Runs Non-Maximum Suppression (NMS) on inference results
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+
+ nc = prediction.shape[2] - 5 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Settings
+ min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
+ max_det = 300 # maximum number of detections per image
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 10.0 # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0, 6), device=prediction.device)] * prediction.shape[0]
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ l = labels[xi]
+ v = torch.zeros((len(l), nc + 5), device=x.device)
+ v[:, :4] = l[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ if nc == 1:
+ x[:, 5:] = x[:, 4:5] # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ print(f'WARNING: NMS time limit {time_limit}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def non_max_suppression_kpt(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
+ labels=(), kpt_label=False, nc=None, nkpt=None):
+ """Runs Non-Maximum Suppression (NMS) on inference results
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+ if nc is None:
+ nc = prediction.shape[2] - 5 if not kpt_label else prediction.shape[2] - 56 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Settings
+ min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
+ max_det = 300 # maximum number of detections per image
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 10.0 # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0,6), device=prediction.device)] * prediction.shape[0]
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ l = labels[xi]
+ v = torch.zeros((len(l), nc + 5), device=x.device)
+ v[:, :4] = l[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ x[:, 5:5+nc] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ if not kpt_label:
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+ else:
+ kpts = x[:, 6:]
+ conf, j = x[:, 5:6].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float(), kpts), 1)[conf.view(-1) > conf_thres]
+
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ print(f'WARNING: NMS time limit {time_limit}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def strip_optimizer(f='best.pt', s=''): # from utils.general import *; strip_optimizer()
+ # Strip optimizer from 'f' to finalize training, optionally save as 's'
+ x = torch.load(f, map_location=torch.device('cpu'))
+ if x.get('ema'):
+ x['model'] = x['ema'] # replace model with ema
+ for k in 'optimizer', 'training_results', 'wandb_id', 'ema', 'updates': # keys
+ x[k] = None
+ x['epoch'] = -1
+ x['model'].half() # to FP16
+ for p in x['model'].parameters():
+ p.requires_grad = False
+ torch.save(x, s or f)
+ mb = os.path.getsize(s or f) / 1E6 # filesize
+ print(f"Optimizer stripped from {f},{(' saved as %s,' % s) if s else ''} {mb:.1f}MB")
+
+
+def print_mutation(hyp, results, yaml_file='hyp_evolved.yaml', bucket=''):
+ # Print mutation results to evolve.txt (for use with train.py --evolve)
+ a = '%10s' * len(hyp) % tuple(hyp.keys()) # hyperparam keys
+ b = '%10.3g' * len(hyp) % tuple(hyp.values()) # hyperparam values
+ c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
+ print('\n%s\n%s\nEvolved fitness: %s\n' % (a, b, c))
+
+ if bucket:
+ url = 'gs://%s/evolve.txt' % bucket
+ if gsutil_getsize(url) > (os.path.getsize('evolve.txt') if os.path.exists('evolve.txt') else 0):
+ os.system('gsutil cp %s .' % url) # download evolve.txt if larger than local
+
+ with open('evolve.txt', 'a') as f: # append result
+ f.write(c + b + '\n')
+ x = np.unique(np.loadtxt('evolve.txt', ndmin=2), axis=0) # load unique rows
+ x = x[np.argsort(-fitness(x))] # sort
+ np.savetxt('evolve.txt', x, '%10.3g') # save sort by fitness
+
+ # Save yaml
+ for i, k in enumerate(hyp.keys()):
+ hyp[k] = float(x[0, i + 7])
+ with open(yaml_file, 'w') as f:
+ results = tuple(x[0, :7])
+ c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
+ f.write('# Hyperparameter Evolution Results\n# Generations: %g\n# Metrics: ' % len(x) + c + '\n\n')
+ yaml.dump(hyp, f, sort_keys=False)
+
+ if bucket:
+ os.system('gsutil cp evolve.txt %s gs://%s' % (yaml_file, bucket)) # upload
+
+
+def apply_classifier(x, model, img, im0):
+ # applies a second stage classifier to yolo outputs
+ im0 = [im0] if isinstance(im0, np.ndarray) else im0
+ for i, d in enumerate(x): # per image
+ if d is not None and len(d):
+ d = d.clone()
+
+ # Reshape and pad cutouts
+ b = xyxy2xywh(d[:, :4]) # boxes
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # rectangle to square
+ b[:, 2:] = b[:, 2:] * 1.3 + 30 # pad
+ d[:, :4] = xywh2xyxy(b).long()
+
+ # Rescale boxes from img_size to im0 size
+ scale_coords(img.shape[2:], d[:, :4], im0[i].shape)
+
+ # Classes
+ pred_cls1 = d[:, 5].long()
+ ims = []
+ for j, a in enumerate(d): # per item
+ cutout = im0[i][int(a[1]):int(a[3]), int(a[0]):int(a[2])]
+ im = cv2.resize(cutout, (224, 224)) # BGR
+ # cv2.imwrite('test%i.jpg' % j, cutout)
+
+ im = im[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ im = np.ascontiguousarray(im, dtype=np.float32) # uint8 to float32
+ im /= 255.0 # 0 - 255 to 0.0 - 1.0
+ ims.append(im)
+
+ pred_cls2 = model(torch.Tensor(ims).to(d.device)).argmax(1) # classifier prediction
+ x[i] = x[i][pred_cls1 == pred_cls2] # retain matching class detections
+
+ return x
+
+
+def increment_path(path, exist_ok=True, sep=''):
+ # Increment path, i.e. runs/exp --> runs/exp{sep}0, runs/exp{sep}1 etc.
+ path = Path(path) # os-agnostic
+ if (path.exists() and exist_ok) or (not path.exists()):
+ return str(path)
+ else:
+ dirs = glob.glob(f"{path}{sep}*") # similar paths
+ matches = [re.search(rf"%s{sep}(\d+)" % path.stem, d) for d in dirs]
+ i = [int(m.groups()[0]) for m in matches if m] # indices
+ n = max(i) + 1 if i else 2 # increment number
+ return f"{path}{sep}{n}" # update path
diff --git a/ipex/utils/google_app_engine/Dockerfile b/ipex/utils/google_app_engine/Dockerfile
new file mode 100644
index 000000000..0155618f4
--- /dev/null
+++ b/ipex/utils/google_app_engine/Dockerfile
@@ -0,0 +1,25 @@
+FROM gcr.io/google-appengine/python
+
+# Create a virtualenv for dependencies. This isolates these packages from
+# system-level packages.
+# Use -p python3 or -p python3.7 to select python version. Default is version 2.
+RUN virtualenv /env -p python3
+
+# Setting these environment variables are the same as running
+# source /env/bin/activate.
+ENV VIRTUAL_ENV /env
+ENV PATH /env/bin:$PATH
+
+RUN apt-get update && apt-get install -y python-opencv
+
+# Copy the application's requirements.txt and run pip to install all
+# dependencies into the virtualenv.
+ADD requirements.txt /app/requirements.txt
+RUN pip install -r /app/requirements.txt
+
+# Add the application source code.
+ADD . /app
+
+# Run a WSGI server to serve the application. gunicorn must be declared as
+# a dependency in requirements.txt.
+CMD gunicorn -b :$PORT main:app
diff --git a/ipex/utils/google_app_engine/additional_requirements.txt b/ipex/utils/google_app_engine/additional_requirements.txt
new file mode 100644
index 000000000..5fcc30524
--- /dev/null
+++ b/ipex/utils/google_app_engine/additional_requirements.txt
@@ -0,0 +1,4 @@
+# add these requirements in your app on top of the existing ones
+pip==18.1
+Flask==1.0.2
+gunicorn==19.9.0
diff --git a/ipex/utils/google_app_engine/app.yaml b/ipex/utils/google_app_engine/app.yaml
new file mode 100644
index 000000000..69b8f68b3
--- /dev/null
+++ b/ipex/utils/google_app_engine/app.yaml
@@ -0,0 +1,14 @@
+runtime: custom
+env: flex
+
+service: yolorapp
+
+liveness_check:
+ initial_delay_sec: 600
+
+manual_scaling:
+ instances: 1
+resources:
+ cpu: 1
+ memory_gb: 4
+ disk_size_gb: 20
\ No newline at end of file
diff --git a/ipex/utils/google_utils.py b/ipex/utils/google_utils.py
new file mode 100644
index 000000000..f363408e6
--- /dev/null
+++ b/ipex/utils/google_utils.py
@@ -0,0 +1,123 @@
+# Google utils: https://cloud.google.com/storage/docs/reference/libraries
+
+import os
+import platform
+import subprocess
+import time
+from pathlib import Path
+
+import requests
+import torch
+
+
+def gsutil_getsize(url=''):
+ # gs://bucket/file size https://cloud.google.com/storage/docs/gsutil/commands/du
+ s = subprocess.check_output(f'gsutil du {url}', shell=True).decode('utf-8')
+ return eval(s.split(' ')[0]) if len(s) else 0 # bytes
+
+
+def attempt_download(file, repo='WongKinYiu/yolov7'):
+ # Attempt file download if does not exist
+ file = Path(str(file).strip().replace("'", '').lower())
+
+ if not file.exists():
+ try:
+ response = requests.get(f'https://api.github.com/repos/{repo}/releases/latest').json() # github api
+ assets = [x['name'] for x in response['assets']] # release assets
+ tag = response['tag_name'] # i.e. 'v1.0'
+ except: # fallback plan
+ assets = ['yolov7.pt', 'yolov7-tiny.pt', 'yolov7x.pt', 'yolov7-d6.pt', 'yolov7-e6.pt',
+ 'yolov7-e6e.pt', 'yolov7-w6.pt']
+ tag = subprocess.check_output('git tag', shell=True).decode().split()[-1]
+
+ name = file.name
+ if name in assets:
+ msg = f'{file} missing, try downloading from https://github.com/{repo}/releases/'
+ redundant = False # second download option
+ try: # GitHub
+ url = f'https://github.com/{repo}/releases/download/{tag}/{name}'
+ print(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, file)
+ assert file.exists() and file.stat().st_size > 1E6 # check
+ except Exception as e: # GCP
+ print(f'Download error: {e}')
+ assert redundant, 'No secondary mirror'
+ url = f'https://storage.googleapis.com/{repo}/ckpt/{name}'
+ print(f'Downloading {url} to {file}...')
+ os.system(f'curl -L {url} -o {file}') # torch.hub.download_url_to_file(url, weights)
+ finally:
+ if not file.exists() or file.stat().st_size < 1E6: # check
+ file.unlink(missing_ok=True) # remove partial downloads
+ print(f'ERROR: Download failure: {msg}')
+ print('')
+ return
+
+
+def gdrive_download(id='', file='tmp.zip'):
+ # Downloads a file from Google Drive. from yolov7.utils.google_utils import *; gdrive_download()
+ t = time.time()
+ file = Path(file)
+ cookie = Path('cookie') # gdrive cookie
+ print(f'Downloading https://drive.google.com/uc?export=download&id={id} as {file}... ', end='')
+ file.unlink(missing_ok=True) # remove existing file
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Attempt file download
+ out = "NUL" if platform.system() == "Windows" else "/dev/null"
+ os.system(f'curl -c ./cookie -s -L "drive.google.com/uc?export=download&id={id}" > {out}')
+ if os.path.exists('cookie'): # large file
+ s = f'curl -Lb ./cookie "drive.google.com/uc?export=download&confirm={get_token()}&id={id}" -o {file}'
+ else: # small file
+ s = f'curl -s -L -o {file} "drive.google.com/uc?export=download&id={id}"'
+ r = os.system(s) # execute, capture return
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Error check
+ if r != 0:
+ file.unlink(missing_ok=True) # remove partial
+ print('Download error ') # raise Exception('Download error')
+ return r
+
+ # Unzip if archive
+ if file.suffix == '.zip':
+ print('unzipping... ', end='')
+ os.system(f'unzip -q {file}') # unzip
+ file.unlink() # remove zip to free space
+
+ print(f'Done ({time.time() - t:.1f}s)')
+ return r
+
+
+def get_token(cookie="./cookie"):
+ with open(cookie) as f:
+ for line in f:
+ if "download" in line:
+ return line.split()[-1]
+ return ""
+
+# def upload_blob(bucket_name, source_file_name, destination_blob_name):
+# # Uploads a file to a bucket
+# # https://cloud.google.com/storage/docs/uploading-objects#storage-upload-object-python
+#
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(destination_blob_name)
+#
+# blob.upload_from_filename(source_file_name)
+#
+# print('File {} uploaded to {}.'.format(
+# source_file_name,
+# destination_blob_name))
+#
+#
+# def download_blob(bucket_name, source_blob_name, destination_file_name):
+# # Uploads a blob from a bucket
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(source_blob_name)
+#
+# blob.download_to_filename(destination_file_name)
+#
+# print('Blob {} downloaded to {}.'.format(
+# source_blob_name,
+# destination_file_name))
diff --git a/ipex/utils/loss.py b/ipex/utils/loss.py
new file mode 100644
index 000000000..2b1d968f8
--- /dev/null
+++ b/ipex/utils/loss.py
@@ -0,0 +1,1697 @@
+# Loss functions
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+from utils.general import bbox_iou, bbox_alpha_iou, box_iou, box_giou, box_diou, box_ciou, xywh2xyxy
+from utils.torch_utils import is_parallel
+
+
+def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
+ # return positive, negative label smoothing BCE targets
+ return 1.0 - 0.5 * eps, 0.5 * eps
+
+
+class BCEBlurWithLogitsLoss(nn.Module):
+ # BCEwithLogitLoss() with reduced missing label effects.
+ def __init__(self, alpha=0.05):
+ super(BCEBlurWithLogitsLoss, self).__init__()
+ self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
+ self.alpha = alpha
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ pred = torch.sigmoid(pred) # prob from logits
+ dx = pred - true # reduce only missing label effects
+ # dx = (pred - true).abs() # reduce missing label and false label effects
+ alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
+ loss *= alpha_factor
+ return loss.mean()
+
+
+class SigmoidBin(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, bin_count=10, min=0.0, max=1.0, reg_scale = 2.0, use_loss_regression=True, use_fw_regression=True, BCE_weight=1.0, smooth_eps=0.0):
+ super(SigmoidBin, self).__init__()
+
+ self.bin_count = bin_count
+ self.length = bin_count + 1
+ self.min = min
+ self.max = max
+ self.scale = float(max - min)
+ self.shift = self.scale / 2.0
+
+ self.use_loss_regression = use_loss_regression
+ self.use_fw_regression = use_fw_regression
+ self.reg_scale = reg_scale
+ self.BCE_weight = BCE_weight
+
+ start = min + (self.scale/2.0) / self.bin_count
+ end = max - (self.scale/2.0) / self.bin_count
+ step = self.scale / self.bin_count
+ self.step = step
+ #print(f" start = {start}, end = {end}, step = {step} ")
+
+ bins = torch.range(start, end + 0.0001, step).float()
+ self.register_buffer('bins', bins)
+
+
+ self.cp = 1.0 - 0.5 * smooth_eps
+ self.cn = 0.5 * smooth_eps
+
+ self.BCEbins = nn.BCEWithLogitsLoss(pos_weight=torch.Tensor([BCE_weight]))
+ self.MSELoss = nn.MSELoss()
+
+ def get_length(self):
+ return self.length
+
+ def forward(self, pred):
+ assert pred.shape[-1] == self.length, 'pred.shape[-1]=%d is not equal to self.length=%d' % (pred.shape[-1], self.length)
+
+ pred_reg = (pred[..., 0] * self.reg_scale - self.reg_scale/2.0) * self.step
+ pred_bin = pred[..., 1:(1+self.bin_count)]
+
+ _, bin_idx = torch.max(pred_bin, dim=-1)
+ bin_bias = self.bins[bin_idx]
+
+ if self.use_fw_regression:
+ result = pred_reg + bin_bias
+ else:
+ result = bin_bias
+ result = result.clamp(min=self.min, max=self.max)
+
+ return result
+
+
+ def training_loss(self, pred, target):
+ assert pred.shape[-1] == self.length, 'pred.shape[-1]=%d is not equal to self.length=%d' % (pred.shape[-1], self.length)
+ assert pred.shape[0] == target.shape[0], 'pred.shape=%d is not equal to the target.shape=%d' % (pred.shape[0], target.shape[0])
+ device = pred.device
+
+ pred_reg = (pred[..., 0].sigmoid() * self.reg_scale - self.reg_scale/2.0) * self.step
+ pred_bin = pred[..., 1:(1+self.bin_count)]
+
+ diff_bin_target = torch.abs(target[..., None] - self.bins)
+ _, bin_idx = torch.min(diff_bin_target, dim=-1)
+
+ bin_bias = self.bins[bin_idx]
+ bin_bias.requires_grad = False
+ result = pred_reg + bin_bias
+
+ target_bins = torch.full_like(pred_bin, self.cn, device=device) # targets
+ n = pred.shape[0]
+ target_bins[range(n), bin_idx] = self.cp
+
+ loss_bin = self.BCEbins(pred_bin, target_bins) # BCE
+
+ if self.use_loss_regression:
+ loss_regression = self.MSELoss(result, target) # MSE
+ loss = loss_bin + loss_regression
+ else:
+ loss = loss_bin
+
+ out_result = result.clamp(min=self.min, max=self.max)
+
+ return loss, out_result
+
+
+class FocalLoss(nn.Module):
+ # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(FocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ # p_t = torch.exp(-loss)
+ # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
+
+ # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = (1.0 - p_t) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class QFocalLoss(nn.Module):
+ # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(QFocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = torch.abs(true - pred_prob) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+class RankSort(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, delta_RS=0.50, eps=1e-10):
+
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets > 0.)
+ fg_logits = logits[fg_labels]
+ fg_targets = targets[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta_RS
+ relevant_bg_labels=((targets==0) & (logits>=threshold_logit))
+
+ relevant_bg_logits = logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ sorting_error=torch.zeros(fg_num).cuda()
+ ranking_error=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ # Difference Transforms (x_ij)
+ fg_relations=fg_logits-fg_logits[ii]
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+
+ if delta_RS > 0:
+ fg_relations=torch.clamp(fg_relations/(2*delta_RS)+0.5,min=0,max=1)
+ bg_relations=torch.clamp(bg_relations/(2*delta_RS)+0.5,min=0,max=1)
+ else:
+ fg_relations = (fg_relations >= 0).float()
+ bg_relations = (bg_relations >= 0).float()
+
+ # Rank of ii among pos and false positive number (bg with larger scores)
+ rank_pos=torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+
+ # Rank of ii among all examples
+ rank=rank_pos+FP_num
+
+ # Ranking error of example ii. target_ranking_error is always 0. (Eq. 7)
+ ranking_error[ii]=FP_num/rank
+
+ # Current sorting error of example ii. (Eq. 7)
+ current_sorting_error = torch.sum(fg_relations*(1-fg_targets))/rank_pos
+
+ #Find examples in the target sorted order for example ii
+ iou_relations = (fg_targets >= fg_targets[ii])
+ target_sorted_order = iou_relations * fg_relations
+
+ #The rank of ii among positives in sorted order
+ rank_pos_target = torch.sum(target_sorted_order)
+
+ #Compute target sorting error. (Eq. 8)
+ #Since target ranking error is 0, this is also total target error
+ target_sorting_error= torch.sum(target_sorted_order*(1-fg_targets))/rank_pos_target
+
+ #Compute sorting error on example ii
+ sorting_error[ii] = current_sorting_error - target_sorting_error
+
+ #Identity Update for Ranking Error
+ if FP_num > eps:
+ #For ii the update is the ranking error
+ fg_grad[ii] -= ranking_error[ii]
+ #For negatives, distribute error via ranking pmf (i.e. bg_relations/FP_num)
+ relevant_bg_grad += (bg_relations*(ranking_error[ii]/FP_num))
+
+ #Find the positives that are misranked (the cause of the error)
+ #These are the ones with smaller IoU but larger logits
+ missorted_examples = (~ iou_relations) * fg_relations
+
+ #Denominotor of sorting pmf
+ sorting_pmf_denom = torch.sum(missorted_examples)
+
+ #Identity Update for Sorting Error
+ if sorting_pmf_denom > eps:
+ #For ii the update is the sorting error
+ fg_grad[ii] -= sorting_error[ii]
+ #For positives, distribute error via sorting pmf (i.e. missorted_examples/sorting_pmf_denom)
+ fg_grad += (missorted_examples*(sorting_error[ii]/sorting_pmf_denom))
+
+ #Normalize gradients by number of positives
+ classification_grads[fg_labels]= (fg_grad/fg_num)
+ classification_grads[relevant_bg_labels]= (relevant_bg_grad/fg_num)
+
+ ctx.save_for_backward(classification_grads)
+
+ return ranking_error.mean(), sorting_error.mean()
+
+ @staticmethod
+ def backward(ctx, out_grad1, out_grad2):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None, None
+
+class aLRPLoss(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, regression_losses, delta=1., eps=1e-5):
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets == 1)
+ fg_logits = logits[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta
+
+ #Get valid bg logits
+ relevant_bg_labels=((targets==0)&(logits>=threshold_logit))
+ relevant_bg_logits=logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ rank=torch.zeros(fg_num).cuda()
+ prec=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ max_prec=0
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ #x_ij s as score differences with fgs
+ fg_relations=fg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with fgs
+ fg_relations=torch.clamp(fg_relations/(2*delta)+0.5,min=0,max=1)
+ #Discard i=j in the summation in rank_pos
+ fg_relations[ii]=0
+
+ #x_ij s as score differences with bgs
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with bgs
+ bg_relations=torch.clamp(bg_relations/(2*delta)+0.5,min=0,max=1)
+
+ #Compute the rank of the example within fgs and number of bgs with larger scores
+ rank_pos=1+torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+ #Store the total since it is normalizer also for aLRP Regression error
+ rank[ii]=rank_pos+FP_num
+
+ #Compute precision for this example to compute classification loss
+ prec[ii]=rank_pos/rank[ii]
+ #For stability, set eps to a infinitesmall value (e.g. 1e-6), then compute grads
+ if FP_num > eps:
+ fg_grad[ii] = -(torch.sum(fg_relations*regression_losses)+FP_num)/rank[ii]
+ relevant_bg_grad += (bg_relations*(-fg_grad[ii]/FP_num))
+
+ #aLRP with grad formulation fg gradient
+ classification_grads[fg_labels]= fg_grad
+ #aLRP with grad formulation bg gradient
+ classification_grads[relevant_bg_labels]= relevant_bg_grad
+
+ classification_grads /= (fg_num)
+
+ cls_loss=1-prec.mean()
+ ctx.save_for_backward(classification_grads)
+
+ return cls_loss, rank, order
+
+ @staticmethod
+ def backward(ctx, out_grad1, out_grad2, out_grad3):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None, None, None
+
+
+class APLoss(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, delta=1.):
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets == 1)
+ fg_logits = logits[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta
+
+ #Get valid bg logits
+ relevant_bg_labels=((targets==0)&(logits>=threshold_logit))
+ relevant_bg_logits=logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ rank=torch.zeros(fg_num).cuda()
+ prec=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ max_prec=0
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ #x_ij s as score differences with fgs
+ fg_relations=fg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with fgs
+ fg_relations=torch.clamp(fg_relations/(2*delta)+0.5,min=0,max=1)
+ #Discard i=j in the summation in rank_pos
+ fg_relations[ii]=0
+
+ #x_ij s as score differences with bgs
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with bgs
+ bg_relations=torch.clamp(bg_relations/(2*delta)+0.5,min=0,max=1)
+
+ #Compute the rank of the example within fgs and number of bgs with larger scores
+ rank_pos=1+torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+ #Store the total since it is normalizer also for aLRP Regression error
+ rank[ii]=rank_pos+FP_num
+
+ #Compute precision for this example
+ current_prec=rank_pos/rank[ii]
+
+ #Compute interpolated AP and store gradients for relevant bg examples
+ if (max_prec<=current_prec):
+ max_prec=current_prec
+ relevant_bg_grad += (bg_relations/rank[ii])
+ else:
+ relevant_bg_grad += (bg_relations/rank[ii])*(((1-max_prec)/(1-current_prec)))
+
+ #Store fg gradients
+ fg_grad[ii]=-(1-max_prec)
+ prec[ii]=max_prec
+
+ #aLRP with grad formulation fg gradient
+ classification_grads[fg_labels]= fg_grad
+ #aLRP with grad formulation bg gradient
+ classification_grads[relevant_bg_labels]= relevant_bg_grad
+
+ classification_grads /= fg_num
+
+ cls_loss=1-prec.mean()
+ ctx.save_for_backward(classification_grads)
+
+ return cls_loss
+
+ @staticmethod
+ def backward(ctx, out_grad1):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLoss, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ #self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.1, .05]) # P3-P7
+ #self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.5, 0.4, .1]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), tcls[i]] = self.cp
+ #t[t==self.cp] = iou.detach().clamp(0).type(t.dtype)
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch = [], [], [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+
+ return tcls, tbox, indices, anch
+
+
+class ComputeLossOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p, targets, imgs)
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p]
+
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ #pxy = ps[:, :2].sigmoid() * 3. - 1.
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ #indices, anch = self.find_positive(p, targets)
+ indices, anch = self.find_3_positive(p, targets)
+ #indices, anch = self.find_4_positive(p, targets)
+ #indices, anch = self.find_5_positive(p, targets)
+ #indices, anch = self.find_9_positive(p, targets)
+ device = torch.device(targets.device)
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append((torch.ones(size=(len(b),)) * i).to(device))
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(10, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost, device=device)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = (matching_matrix.sum(0) > 0.0).to(device)
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+
+class ComputeLossBinOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossBinOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+ #MSEangle = nn.MSELoss().to(device)
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride', 'bin_count':
+ setattr(self, k, getattr(det, k))
+
+ #xy_bin_sigmoid = SigmoidBin(bin_count=11, min=-0.5, max=1.5, use_loss_regression=False).to(device)
+ wh_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0, use_loss_regression=False).to(device)
+ #angle_bin_sigmoid = SigmoidBin(bin_count=31, min=-1.1, max=1.1, use_loss_regression=False).to(device)
+ self.wh_bin_sigmoid = wh_bin_sigmoid
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p, targets, imgs)
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p]
+
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ obj_idx = self.wh_bin_sigmoid.get_length()*2 + 2 # x,y, w-bce, h-bce # xy_bin_sigmoid.get_length()*2
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+
+ #pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ ##pxy = ps[:, :2].sigmoid() * 3. - 1.
+ #pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ #pbox = torch.cat((pxy, pwh), 1) # predicted box
+
+ #x_loss, px = xy_bin_sigmoid.training_loss(ps[..., 0:12], tbox[i][..., 0])
+ #y_loss, py = xy_bin_sigmoid.training_loss(ps[..., 12:24], tbox[i][..., 1])
+ w_loss, pw = self.wh_bin_sigmoid.training_loss(ps[..., 2:(3+self.bin_count)], selected_tbox[..., 2] / anchors[i][..., 0])
+ h_loss, ph = self.wh_bin_sigmoid.training_loss(ps[..., (3+self.bin_count):obj_idx], selected_tbox[..., 3] / anchors[i][..., 1])
+
+ pw *= anchors[i][..., 0]
+ ph *= anchors[i][..., 1]
+
+ px = ps[:, 0].sigmoid() * 2. - 0.5
+ py = ps[:, 1].sigmoid() * 2. - 0.5
+
+ lbox += w_loss + h_loss # + x_loss + y_loss
+
+ #print(f"\n px = {px.shape}, py = {py.shape}, pw = {pw.shape}, ph = {ph.shape} \n")
+
+ pbox = torch.cat((px.unsqueeze(1), py.unsqueeze(1), pw.unsqueeze(1), ph.unsqueeze(1)), 1).to(device) # predicted box
+
+
+
+
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, (1+obj_idx):], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, (1+obj_idx):], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., obj_idx], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ #indices, anch = self.find_positive(p, targets)
+ indices, anch = self.find_3_positive(p, targets)
+ #indices, anch = self.find_4_positive(p, targets)
+ #indices, anch = self.find_5_positive(p, targets)
+ #indices, anch = self.find_9_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ obj_idx = self.wh_bin_sigmoid.get_length()*2 + 2
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, obj_idx:(obj_idx+1)])
+ p_cls.append(fg_pred[:, (obj_idx+1):])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pw = self.wh_bin_sigmoid.forward(fg_pred[..., 2:(3+self.bin_count)].sigmoid()) * anch[i][idx][:, 0] * self.stride[i]
+ ph = self.wh_bin_sigmoid.forward(fg_pred[..., (3+self.bin_count):obj_idx].sigmoid()) * anch[i][idx][:, 1] * self.stride[i]
+
+ pxywh = torch.cat([pxy, pw.unsqueeze(1), ph.unsqueeze(1)], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(10, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+
+class ComputeLossAuxOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossAuxOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs_aux, as_aux_, gjs_aux, gis_aux, targets_aux, anchors_aux = self.build_targets2(p[:self.nl], targets, imgs)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p[:self.nl], targets, imgs)
+ pre_gen_gains_aux = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p[:self.nl]]
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p[:self.nl]]
+
+
+ # Losses
+ for i in range(self.nl): # layer index, layer predictions
+ pi = p[i]
+ pi_aux = p[i+self.nl]
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ b_aux, a_aux, gj_aux, gi_aux = bs_aux[i], as_aux_[i], gjs_aux[i], gis_aux[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+ tobj_aux = torch.zeros_like(pi_aux[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ n_aux = b_aux.shape[0] # number of targets
+ if n_aux:
+ ps_aux = pi_aux[b_aux, a_aux, gj_aux, gi_aux] # prediction subset corresponding to targets
+ grid_aux = torch.stack([gi_aux, gj_aux], dim=1)
+ pxy_aux = ps_aux[:, :2].sigmoid() * 2. - 0.5
+ #pxy_aux = ps_aux[:, :2].sigmoid() * 3. - 1.
+ pwh_aux = (ps_aux[:, 2:4].sigmoid() * 2) ** 2 * anchors_aux[i]
+ pbox_aux = torch.cat((pxy_aux, pwh_aux), 1) # predicted box
+ selected_tbox_aux = targets_aux[i][:, 2:6] * pre_gen_gains_aux[i]
+ selected_tbox_aux[:, :2] -= grid_aux
+ iou_aux = bbox_iou(pbox_aux.T, selected_tbox_aux, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += 0.25 * (1.0 - iou_aux).mean() # iou loss
+
+ # Objectness
+ tobj_aux[b_aux, a_aux, gj_aux, gi_aux] = (1.0 - self.gr) + self.gr * iou_aux.detach().clamp(0).type(tobj_aux.dtype) # iou ratio
+
+ # Classification
+ selected_tcls_aux = targets_aux[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t_aux = torch.full_like(ps_aux[:, 5:], self.cn, device=device) # targets
+ t_aux[range(n_aux), selected_tcls_aux] = self.cp
+ lcls += 0.25 * self.BCEcls(ps_aux[:, 5:], t_aux) # BCE
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ obji_aux = self.BCEobj(pi_aux[..., 4], tobj_aux)
+ lobj += obji * self.balance[i] + 0.25 * obji_aux * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ indices, anch = self.find_3_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(20, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def build_targets2(self, p, targets, imgs):
+
+ indices, anch = self.find_5_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(20, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_5_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 1.0 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
diff --git a/ipex/utils/metrics.py b/ipex/utils/metrics.py
new file mode 100644
index 000000000..6d2f53647
--- /dev/null
+++ b/ipex/utils/metrics.py
@@ -0,0 +1,227 @@
+# Model validation metrics
+
+from pathlib import Path
+
+import matplotlib.pyplot as plt
+import numpy as np
+import torch
+
+from . import general
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
+ return (x[:, :4] * w).sum(1)
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, v5_metric=False, plot=False, save_dir='.', names=()):
+ """ Compute the average precision, given the recall and precision curves.
+ Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
+ # Arguments
+ tp: True positives (nparray, nx1 or nx10).
+ conf: Objectness value from 0-1 (nparray).
+ pred_cls: Predicted object classes (nparray).
+ target_cls: True object classes (nparray).
+ plot: Plot precision-recall curve at mAP@0.5
+ save_dir: Plot save directory
+ # Returns
+ The average precision as computed in py-faster-rcnn.
+ """
+
+ # Sort by objectness
+ i = np.argsort(-conf)
+ tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
+
+ # Find unique classes
+ unique_classes = np.unique(target_cls)
+ nc = unique_classes.shape[0] # number of classes, number of detections
+
+ # Create Precision-Recall curve and compute AP for each class
+ px, py = np.linspace(0, 1, 1000), [] # for plotting
+ ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
+ for ci, c in enumerate(unique_classes):
+ i = pred_cls == c
+ n_l = (target_cls == c).sum() # number of labels
+ n_p = i.sum() # number of predictions
+
+ if n_p == 0 or n_l == 0:
+ continue
+ else:
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + 1e-16) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j], v5_metric=v5_metric)
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+
+ # Compute F1 (harmonic mean of precision and recall)
+ f1 = 2 * p * r / (p + r + 1e-16)
+ if plot:
+ plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
+
+ i = f1.mean(0).argmax() # max F1 index
+ return p[:, i], r[:, i], ap, f1[:, i], unique_classes.astype('int32')
+
+
+def compute_ap(recall, precision, v5_metric=False):
+ """ Compute the average precision, given the recall and precision curves
+ # Arguments
+ recall: The recall curve (list)
+ precision: The precision curve (list)
+ v5_metric: Assume maximum recall to be 1.0, as in YOLOv5, MMDetetion etc.
+ # Returns
+ Average precision, precision curve, recall curve
+ """
+
+ # Append sentinel values to beginning and end
+ if v5_metric: # New YOLOv5 metric, same as MMDetection and Detectron2 repositories
+ mrec = np.concatenate(([0.], recall, [1.0]))
+ else: # Old YOLOv5 metric, i.e. default YOLOv7 metric
+ mrec = np.concatenate(([0.], recall, [recall[-1] + 0.01]))
+ mpre = np.concatenate(([1.], precision, [0.]))
+
+ # Compute the precision envelope
+ mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
+
+ # Integrate area under curve
+ method = 'interp' # methods: 'continuous', 'interp'
+ if method == 'interp':
+ x = np.linspace(0, 1, 101) # 101-point interp (COCO)
+ ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
+ else: # 'continuous'
+ i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
+ ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
+
+ return ap, mpre, mrec
+
+
+class ConfusionMatrix:
+ # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
+ def __init__(self, nc, conf=0.25, iou_thres=0.45):
+ self.matrix = np.zeros((nc + 1, nc + 1))
+ self.nc = nc # number of classes
+ self.conf = conf
+ self.iou_thres = iou_thres
+
+ def process_batch(self, detections, labels):
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ None, updates confusion matrix accordingly
+ """
+ detections = detections[detections[:, 4] > self.conf]
+ gt_classes = labels[:, 0].int()
+ detection_classes = detections[:, 5].int()
+ iou = general.box_iou(labels[:, 1:], detections[:, :4])
+
+ x = torch.where(iou > self.iou_thres)
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ else:
+ matches = np.zeros((0, 3))
+
+ n = matches.shape[0] > 0
+ m0, m1, _ = matches.transpose().astype(np.int16)
+ for i, gc in enumerate(gt_classes):
+ j = m0 == i
+ if n and sum(j) == 1:
+ self.matrix[gc, detection_classes[m1[j]]] += 1 # correct
+ else:
+ self.matrix[self.nc, gc] += 1 # background FP
+
+ if n:
+ for i, dc in enumerate(detection_classes):
+ if not any(m1 == i):
+ self.matrix[dc, self.nc] += 1 # background FN
+
+ def matrix(self):
+ return self.matrix
+
+ def plot(self, save_dir='', names=()):
+ try:
+ import seaborn as sn
+
+ array = self.matrix / (self.matrix.sum(0).reshape(1, self.nc + 1) + 1E-6) # normalize
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig = plt.figure(figsize=(12, 9), tight_layout=True)
+ sn.set(font_scale=1.0 if self.nc < 50 else 0.8) # for label size
+ labels = (0 < len(names) < 99) and len(names) == self.nc # apply names to ticklabels
+ sn.heatmap(array, annot=self.nc < 30, annot_kws={"size": 8}, cmap='Blues', fmt='.2f', square=True,
+ xticklabels=names + ['background FP'] if labels else "auto",
+ yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
+ fig.axes[0].set_xlabel('True')
+ fig.axes[0].set_ylabel('Predicted')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ except Exception as e:
+ pass
+
+ def print(self):
+ for i in range(self.nc + 1):
+ print(' '.join(map(str, self.matrix[i])))
+
+
+# Plots ----------------------------------------------------------------------------------------------------------------
+
+def plot_pr_curve(px, py, ap, save_dir='pr_curve.png', names=()):
+ # Precision-recall curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+ py = np.stack(py, axis=1)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py.T):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)
+ else:
+ ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)
+
+ ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())
+ ax.set_xlabel('Recall')
+ ax.set_ylabel('Precision')
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
+
+
+def plot_mc_curve(px, py, save_dir='mc_curve.png', names=(), xlabel='Confidence', ylabel='Metric'):
+ # Metric-confidence curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)
+ else:
+ ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
+
+ y = py.mean(0)
+ ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
+ ax.set_xlabel(xlabel)
+ ax.set_ylabel(ylabel)
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
diff --git a/ipex/utils/plots.py b/ipex/utils/plots.py
new file mode 100644
index 000000000..fdd8d0e85
--- /dev/null
+++ b/ipex/utils/plots.py
@@ -0,0 +1,489 @@
+# Plotting utils
+
+import glob
+import math
+import os
+import random
+from copy import copy
+from pathlib import Path
+
+import cv2
+import matplotlib
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import seaborn as sns
+import torch
+import yaml
+from PIL import Image, ImageDraw, ImageFont
+from scipy.signal import butter, filtfilt
+
+from utils.general import xywh2xyxy, xyxy2xywh
+from utils.metrics import fitness
+
+# Settings
+matplotlib.rc('font', **{'size': 11})
+matplotlib.use('Agg') # for writing to files only
+
+
+def color_list():
+ # Return first 10 plt colors as (r,g,b) https://stackoverflow.com/questions/51350872/python-from-color-name-to-rgb
+ def hex2rgb(h):
+ return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))
+
+ return [hex2rgb(h) for h in matplotlib.colors.TABLEAU_COLORS.values()] # or BASE_ (8), CSS4_ (148), XKCD_ (949)
+
+
+def hist2d(x, y, n=100):
+ # 2d histogram used in labels.png and evolve.png
+ xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
+ hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
+ xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
+ yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
+ return np.log(hist[xidx, yidx])
+
+
+def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
+ # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
+ def butter_lowpass(cutoff, fs, order):
+ nyq = 0.5 * fs
+ normal_cutoff = cutoff / nyq
+ return butter(order, normal_cutoff, btype='low', analog=False)
+
+ b, a = butter_lowpass(cutoff, fs, order=order)
+ return filtfilt(b, a, data) # forward-backward filter
+
+
+def plot_one_box(x, img, color=None, label=None, line_thickness=3):
+ # Plots one bounding box on image img
+ tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
+ color = color or [random.randint(0, 255) for _ in range(3)]
+ c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
+ cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
+ if label:
+ tf = max(tl - 1, 1) # font thickness
+ t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
+ c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
+ cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
+ cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
+
+
+def plot_one_box_PIL(box, img, color=None, label=None, line_thickness=None):
+ img = Image.fromarray(img)
+ draw = ImageDraw.Draw(img)
+ line_thickness = line_thickness or max(int(min(img.size) / 200), 2)
+ draw.rectangle(box, width=line_thickness, outline=tuple(color)) # plot
+ if label:
+ fontsize = max(round(max(img.size) / 40), 12)
+ font = ImageFont.truetype("Arial.ttf", fontsize)
+ txt_width, txt_height = font.getsize(label)
+ draw.rectangle([box[0], box[1] - txt_height + 4, box[0] + txt_width, box[1]], fill=tuple(color))
+ draw.text((box[0], box[1] - txt_height + 1), label, fill=(255, 255, 255), font=font)
+ return np.asarray(img)
+
+
+def plot_wh_methods(): # from utils.plots import *; plot_wh_methods()
+ # Compares the two methods for width-height anchor multiplication
+ # https://github.com/ultralytics/yolov3/issues/168
+ x = np.arange(-4.0, 4.0, .1)
+ ya = np.exp(x)
+ yb = torch.sigmoid(torch.from_numpy(x)).numpy() * 2
+
+ fig = plt.figure(figsize=(6, 3), tight_layout=True)
+ plt.plot(x, ya, '.-', label='YOLOv3')
+ plt.plot(x, yb ** 2, '.-', label='YOLOR ^2')
+ plt.plot(x, yb ** 1.6, '.-', label='YOLOR ^1.6')
+ plt.xlim(left=-4, right=4)
+ plt.ylim(bottom=0, top=6)
+ plt.xlabel('input')
+ plt.ylabel('output')
+ plt.grid()
+ plt.legend()
+ fig.savefig('comparison.png', dpi=200)
+
+
+def output_to_target(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ for *box, conf, cls in o.cpu().numpy():
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])
+ return np.array(targets)
+
+
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=640, max_subplots=16):
+ # Plot image grid with labels
+
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+
+ # un-normalise
+ if np.max(images[0]) <= 1:
+ images *= 255
+
+ tl = 3 # line thickness
+ tf = max(tl - 1, 1) # font thickness
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+
+ # Check if we should resize
+ scale_factor = max_size / max(h, w)
+ if scale_factor < 1:
+ h = math.ceil(scale_factor * h)
+ w = math.ceil(scale_factor * w)
+
+ colors = color_list() # list of colors
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, img in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+
+ block_x = int(w * (i // ns))
+ block_y = int(h * (i % ns))
+
+ img = img.transpose(1, 2, 0)
+ if scale_factor < 1:
+ img = cv2.resize(img, (w, h))
+
+ mosaic[block_y:block_y + h, block_x:block_x + w, :] = img
+ if len(targets) > 0:
+ image_targets = targets[targets[:, 0] == i]
+ boxes = xywh2xyxy(image_targets[:, 2:6]).T
+ classes = image_targets[:, 1].astype('int')
+ labels = image_targets.shape[1] == 6 # labels if no conf column
+ conf = None if labels else image_targets[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale_factor < 1: # absolute coords need scale if image scales
+ boxes *= scale_factor
+ boxes[[0, 2]] += block_x
+ boxes[[1, 3]] += block_y
+ for j, box in enumerate(boxes.T):
+ cls = int(classes[j])
+ color = colors[cls % len(colors)]
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = '%s' % cls if labels else '%s %.1f' % (cls, conf[j])
+ plot_one_box(box, mosaic, label=label, color=color, line_thickness=tl)
+
+ # Draw image filename labels
+ if paths:
+ label = Path(paths[i]).name[:40] # trim to 40 char
+ t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
+ cv2.putText(mosaic, label, (block_x + 5, block_y + t_size[1] + 5), 0, tl / 3, [220, 220, 220], thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ # Image border
+ cv2.rectangle(mosaic, (block_x, block_y), (block_x + w, block_y + h), (255, 255, 255), thickness=3)
+
+ if fname:
+ r = min(1280. / max(h, w) / ns, 1.0) # ratio to limit image size
+ mosaic = cv2.resize(mosaic, (int(ns * w * r), int(ns * h * r)), interpolation=cv2.INTER_AREA)
+ # cv2.imwrite(fname, cv2.cvtColor(mosaic, cv2.COLOR_BGR2RGB)) # cv2 save
+ Image.fromarray(mosaic).save(fname) # PIL save
+ return mosaic
+
+
+def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):
+ # Plot LR simulating training for full epochs
+ optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
+ y = []
+ for _ in range(epochs):
+ scheduler.step()
+ y.append(optimizer.param_groups[0]['lr'])
+ plt.plot(y, '.-', label='LR')
+ plt.xlabel('epoch')
+ plt.ylabel('LR')
+ plt.grid()
+ plt.xlim(0, epochs)
+ plt.ylim(0)
+ plt.savefig(Path(save_dir) / 'LR.png', dpi=200)
+ plt.close()
+
+
+def plot_test_txt(): # from utils.plots import *; plot_test()
+ # Plot test.txt histograms
+ x = np.loadtxt('test.txt', dtype=np.float32)
+ box = xyxy2xywh(x[:, :4])
+ cx, cy = box[:, 0], box[:, 1]
+
+ fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
+ ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
+ ax.set_aspect('equal')
+ plt.savefig('hist2d.png', dpi=300)
+
+ fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
+ ax[0].hist(cx, bins=600)
+ ax[1].hist(cy, bins=600)
+ plt.savefig('hist1d.png', dpi=200)
+
+
+def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
+ # Plot targets.txt histograms
+ x = np.loadtxt('targets.txt', dtype=np.float32).T
+ s = ['x targets', 'y targets', 'width targets', 'height targets']
+ fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(4):
+ ax[i].hist(x[i], bins=100, label='%.3g +/- %.3g' % (x[i].mean(), x[i].std()))
+ ax[i].legend()
+ ax[i].set_title(s[i])
+ plt.savefig('targets.jpg', dpi=200)
+
+
+def plot_study_txt(path='', x=None): # from utils.plots import *; plot_study_txt()
+ # Plot study.txt generated by test.py
+ fig, ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)
+ # ax = ax.ravel()
+
+ fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
+ # for f in [Path(path) / f'study_coco_{x}.txt' for x in ['yolor-p6', 'yolor-w6', 'yolor-e6', 'yolor-d6']]:
+ for f in sorted(Path(path).glob('study*.txt')):
+ y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
+ x = np.arange(y.shape[1]) if x is None else np.array(x)
+ s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_inference (ms/img)', 't_NMS (ms/img)', 't_total (ms/img)']
+ # for i in range(7):
+ # ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)
+ # ax[i].set_title(s[i])
+
+ j = y[3].argmax() + 1
+ ax2.plot(y[6, 1:j], y[3, 1:j] * 1E2, '.-', linewidth=2, markersize=8,
+ label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
+
+ ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
+ 'k.-', linewidth=2, markersize=8, alpha=.25, label='EfficientDet')
+
+ ax2.grid(alpha=0.2)
+ ax2.set_yticks(np.arange(20, 60, 5))
+ ax2.set_xlim(0, 57)
+ ax2.set_ylim(30, 55)
+ ax2.set_xlabel('GPU Speed (ms/img)')
+ ax2.set_ylabel('COCO AP val')
+ ax2.legend(loc='lower right')
+ plt.savefig(str(Path(path).name) + '.png', dpi=300)
+
+
+def plot_labels(labels, names=(), save_dir=Path(''), loggers=None):
+ # plot dataset labels
+ print('Plotting labels... ')
+ c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
+ nc = int(c.max() + 1) # number of classes
+ colors = color_list()
+ x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])
+
+ # seaborn correlogram
+ sns.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
+ plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)
+ plt.close()
+
+ # matplotlib labels
+ matplotlib.use('svg') # faster
+ ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
+ ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
+ ax[0].set_ylabel('instances')
+ if 0 < len(names) < 30:
+ ax[0].set_xticks(range(len(names)))
+ ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ else:
+ ax[0].set_xlabel('classes')
+ sns.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
+ sns.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)
+
+ # rectangles
+ labels[:, 1:3] = 0.5 # center
+ labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
+ img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
+ for cls, *box in labels[:1000]:
+ ImageDraw.Draw(img).rectangle(box, width=1, outline=colors[int(cls) % 10]) # plot
+ ax[1].imshow(img)
+ ax[1].axis('off')
+
+ for a in [0, 1, 2, 3]:
+ for s in ['top', 'right', 'left', 'bottom']:
+ ax[a].spines[s].set_visible(False)
+
+ plt.savefig(save_dir / 'labels.jpg', dpi=200)
+ matplotlib.use('Agg')
+ plt.close()
+
+ # loggers
+ for k, v in loggers.items() or {}:
+ if k == 'wandb' and v:
+ v.log({"Labels": [v.Image(str(x), caption=x.name) for x in save_dir.glob('*labels*.jpg')]}, commit=False)
+
+
+def plot_evolution(yaml_file='data/hyp.finetune.yaml'): # from utils.plots import *; plot_evolution()
+ # Plot hyperparameter evolution results in evolve.txt
+ with open(yaml_file) as f:
+ hyp = yaml.load(f, Loader=yaml.SafeLoader)
+ x = np.loadtxt('evolve.txt', ndmin=2)
+ f = fitness(x)
+ # weights = (f - f.min()) ** 2 # for weighted results
+ plt.figure(figsize=(10, 12), tight_layout=True)
+ matplotlib.rc('font', **{'size': 8})
+ for i, (k, v) in enumerate(hyp.items()):
+ y = x[:, i + 7]
+ # mu = (y * weights).sum() / weights.sum() # best weighted result
+ mu = y[f.argmax()] # best single result
+ plt.subplot(6, 5, i + 1)
+ plt.scatter(y, f, c=hist2d(y, f, 20), cmap='viridis', alpha=.8, edgecolors='none')
+ plt.plot(mu, f.max(), 'k+', markersize=15)
+ plt.title('%s = %.3g' % (k, mu), fontdict={'size': 9}) # limit to 40 characters
+ if i % 5 != 0:
+ plt.yticks([])
+ print('%15s: %.3g' % (k, mu))
+ plt.savefig('evolve.png', dpi=200)
+ print('\nPlot saved as evolve.png')
+
+
+def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
+ # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()
+ ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
+ s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']
+ files = list(Path(save_dir).glob('frames*.txt'))
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
+ n = results.shape[1] # number of rows
+ x = np.arange(start, min(stop, n) if stop else n)
+ results = results[:, x]
+ t = (results[0] - results[0].min()) # set t0=0s
+ results[0] = x
+ for i, a in enumerate(ax):
+ if i < len(results):
+ label = labels[fi] if len(labels) else f.stem.replace('frames_', '')
+ a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)
+ a.set_title(s[i])
+ a.set_xlabel('time (s)')
+ # if fi == len(files) - 1:
+ # a.set_ylim(bottom=0)
+ for side in ['top', 'right']:
+ a.spines[side].set_visible(False)
+ else:
+ a.remove()
+ except Exception as e:
+ print('Warning: Plotting error for %s; %s' % (f, e))
+
+ ax[1].legend()
+ plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
+
+
+def plot_results_overlay(start=0, stop=0): # from utils.plots import *; plot_results_overlay()
+ # Plot training 'results*.txt', overlaying train and val losses
+ s = ['train', 'train', 'train', 'Precision', 'mAP@0.5', 'val', 'val', 'val', 'Recall', 'mAP@0.5:0.95'] # legends
+ t = ['Box', 'Objectness', 'Classification', 'P-R', 'mAP-F1'] # titles
+ for f in sorted(glob.glob('results*.txt') + glob.glob('../../Downloads/results*.txt')):
+ results = np.loadtxt(f, usecols=[2, 3, 4, 8, 9, 12, 13, 14, 10, 11], ndmin=2).T
+ n = results.shape[1] # number of rows
+ x = range(start, min(stop, n) if stop else n)
+ fig, ax = plt.subplots(1, 5, figsize=(14, 3.5), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(5):
+ for j in [i, i + 5]:
+ y = results[j, x]
+ ax[i].plot(x, y, marker='.', label=s[j])
+ # y_smooth = butter_lowpass_filtfilt(y)
+ # ax[i].plot(x, np.gradient(y_smooth), marker='.', label=s[j])
+
+ ax[i].set_title(t[i])
+ ax[i].legend()
+ ax[i].set_ylabel(f) if i == 0 else None # add filename
+ fig.savefig(f.replace('.txt', '.png'), dpi=200)
+
+
+def plot_results(start=0, stop=0, bucket='', id=(), labels=(), save_dir=''):
+ # Plot training 'results*.txt'. from utils.plots import *; plot_results(save_dir='runs/train/exp')
+ fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
+ ax = ax.ravel()
+ s = ['Box', 'Objectness', 'Classification', 'Precision', 'Recall',
+ 'val Box', 'val Objectness', 'val Classification', 'mAP@0.5', 'mAP@0.5:0.95']
+ if bucket:
+ # files = ['https://storage.googleapis.com/%s/results%g.txt' % (bucket, x) for x in id]
+ files = ['results%g.txt' % x for x in id]
+ c = ('gsutil cp ' + '%s ' * len(files) + '.') % tuple('gs://%s/results%g.txt' % (bucket, x) for x in id)
+ os.system(c)
+ else:
+ files = list(Path(save_dir).glob('results*.txt'))
+ assert len(files), 'No results.txt files found in %s, nothing to plot.' % os.path.abspath(save_dir)
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, usecols=[2, 3, 4, 8, 9, 12, 13, 14, 10, 11], ndmin=2).T
+ n = results.shape[1] # number of rows
+ x = range(start, min(stop, n) if stop else n)
+ for i in range(10):
+ y = results[i, x]
+ if i in [0, 1, 2, 5, 6, 7]:
+ y[y == 0] = np.nan # don't show zero loss values
+ # y /= y[0] # normalize
+ label = labels[fi] if len(labels) else f.stem
+ ax[i].plot(x, y, marker='.', label=label, linewidth=2, markersize=8)
+ ax[i].set_title(s[i])
+ # if i in [5, 6, 7]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print('Warning: Plotting error for %s; %s' % (f, e))
+
+ ax[1].legend()
+ fig.savefig(Path(save_dir) / 'results.png', dpi=200)
+
+
+def output_to_keypoint(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ kpts = o[:,6:]
+ o = o[:,:6]
+ for index, (*box, conf, cls) in enumerate(o.detach().cpu().numpy()):
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf, *list(kpts.detach().cpu().numpy()[index])])
+ return np.array(targets)
+
+
+def plot_skeleton_kpts(im, kpts, steps, orig_shape=None):
+ #Plot the skeleton and keypointsfor coco datatset
+ palette = np.array([[255, 128, 0], [255, 153, 51], [255, 178, 102],
+ [230, 230, 0], [255, 153, 255], [153, 204, 255],
+ [255, 102, 255], [255, 51, 255], [102, 178, 255],
+ [51, 153, 255], [255, 153, 153], [255, 102, 102],
+ [255, 51, 51], [153, 255, 153], [102, 255, 102],
+ [51, 255, 51], [0, 255, 0], [0, 0, 255], [255, 0, 0],
+ [255, 255, 255]])
+
+ skeleton = [[16, 14], [14, 12], [17, 15], [15, 13], [12, 13], [6, 12],
+ [7, 13], [6, 7], [6, 8], [7, 9], [8, 10], [9, 11], [2, 3],
+ [1, 2], [1, 3], [2, 4], [3, 5], [4, 6], [5, 7]]
+
+ pose_limb_color = palette[[9, 9, 9, 9, 7, 7, 7, 0, 0, 0, 0, 0, 16, 16, 16, 16, 16, 16, 16]]
+ pose_kpt_color = palette[[16, 16, 16, 16, 16, 0, 0, 0, 0, 0, 0, 9, 9, 9, 9, 9, 9]]
+ radius = 5
+ num_kpts = len(kpts) // steps
+
+ for kid in range(num_kpts):
+ r, g, b = pose_kpt_color[kid]
+ x_coord, y_coord = kpts[steps * kid], kpts[steps * kid + 1]
+ if not (x_coord % 640 == 0 or y_coord % 640 == 0):
+ if steps == 3:
+ conf = kpts[steps * kid + 2]
+ if conf < 0.5:
+ continue
+ cv2.circle(im, (int(x_coord), int(y_coord)), radius, (int(r), int(g), int(b)), -1)
+
+ for sk_id, sk in enumerate(skeleton):
+ r, g, b = pose_limb_color[sk_id]
+ pos1 = (int(kpts[(sk[0]-1)*steps]), int(kpts[(sk[0]-1)*steps+1]))
+ pos2 = (int(kpts[(sk[1]-1)*steps]), int(kpts[(sk[1]-1)*steps+1]))
+ if steps == 3:
+ conf1 = kpts[(sk[0]-1)*steps+2]
+ conf2 = kpts[(sk[1]-1)*steps+2]
+ if conf1<0.5 or conf2<0.5:
+ continue
+ if pos1[0]%640 == 0 or pos1[1]%640==0 or pos1[0]<0 or pos1[1]<0:
+ continue
+ if pos2[0] % 640 == 0 or pos2[1] % 640 == 0 or pos2[0]<0 or pos2[1]<0:
+ continue
+ cv2.line(im, pos1, pos2, (int(r), int(g), int(b)), thickness=2)
diff --git a/ipex/utils/torch_utils.py b/ipex/utils/torch_utils.py
new file mode 100644
index 000000000..1e631b555
--- /dev/null
+++ b/ipex/utils/torch_utils.py
@@ -0,0 +1,374 @@
+# YOLOR PyTorch utils
+
+import datetime
+import logging
+import math
+import os
+import platform
+import subprocess
+import time
+from contextlib import contextmanager
+from copy import deepcopy
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+import torch.nn as nn
+import torch.nn.functional as F
+import torchvision
+
+try:
+ import thop # for FLOPS computation
+except ImportError:
+ thop = None
+logger = logging.getLogger(__name__)
+
+
+@contextmanager
+def torch_distributed_zero_first(local_rank: int):
+ """
+ Decorator to make all processes in distributed training wait for each local_master to do something.
+ """
+ if local_rank not in [-1, 0]:
+ torch.distributed.barrier()
+ yield
+ if local_rank == 0:
+ torch.distributed.barrier()
+
+
+def init_torch_seeds(seed=0):
+ # Speed-reproducibility tradeoff https://pytorch.org/docs/stable/notes/randomness.html
+ torch.manual_seed(seed)
+ if seed == 0: # slower, more reproducible
+ cudnn.benchmark, cudnn.deterministic = False, True
+ else: # faster, less reproducible
+ cudnn.benchmark, cudnn.deterministic = True, False
+
+
+def date_modified(path=__file__):
+ # return human-readable file modification date, i.e. '2021-3-26'
+ t = datetime.datetime.fromtimestamp(Path(path).stat().st_mtime)
+ return f'{t.year}-{t.month}-{t.day}'
+
+
+def git_describe(path=Path(__file__).parent): # path must be a directory
+ # return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
+ s = f'git -C {path} describe --tags --long --always'
+ try:
+ return subprocess.check_output(s, shell=True, stderr=subprocess.STDOUT).decode()[:-1]
+ except subprocess.CalledProcessError as e:
+ return '' # not a git repository
+
+
+def select_device(device='', batch_size=None):
+ # device = 'cpu' or '0' or '0,1,2,3'
+ s = f'YOLOR 🚀 {git_describe() or date_modified()} torch {torch.__version__} ' # string
+ cpu = device.lower() == 'cpu'
+ if cpu:
+ os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
+ elif device: # non-cpu device requested
+ os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable
+ assert torch.cuda.is_available(), f'CUDA unavailable, invalid device {device} requested' # check availability
+
+ cuda = not cpu and torch.cuda.is_available()
+ if cuda:
+ n = torch.cuda.device_count()
+ if n > 1 and batch_size: # check that batch_size is compatible with device_count
+ assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
+ space = ' ' * len(s)
+ for i, d in enumerate(device.split(',') if device else range(n)):
+ p = torch.cuda.get_device_properties(i)
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / 1024 ** 2}MB)\n" # bytes to MB
+ else:
+ s += 'CPU\n'
+
+ logger.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe
+ return torch.device('cuda:0' if cuda else 'cpu')
+
+
+def time_synchronized():
+ # pytorch-accurate time
+ if torch.cuda.is_available():
+ torch.cuda.synchronize()
+ return time.time()
+
+
+def profile(x, ops, n=100, device=None):
+ # profile a pytorch module or list of modules. Example usage:
+ # x = torch.randn(16, 3, 640, 640) # input
+ # m1 = lambda x: x * torch.sigmoid(x)
+ # m2 = nn.SiLU()
+ # profile(x, [m1, m2], n=100) # profile speed over 100 iterations
+
+ device = device or torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
+ x = x.to(device)
+ x.requires_grad = True
+ print(torch.__version__, device.type, torch.cuda.get_device_properties(0) if device.type == 'cuda' else '')
+ print(f"\n{'Params':>12s}{'GFLOPS':>12s}{'forward (ms)':>16s}{'backward (ms)':>16s}{'input':>24s}{'output':>24s}")
+ for m in ops if isinstance(ops, list) else [ops]:
+ m = m.to(device) if hasattr(m, 'to') else m # device
+ m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m # type
+ dtf, dtb, t = 0., 0., [0., 0., 0.] # dt forward, backward
+ try:
+ flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPS
+ except:
+ flops = 0
+
+ for _ in range(n):
+ t[0] = time_synchronized()
+ y = m(x)
+ t[1] = time_synchronized()
+ try:
+ _ = y.sum().backward()
+ t[2] = time_synchronized()
+ except: # no backward method
+ t[2] = float('nan')
+ dtf += (t[1] - t[0]) * 1000 / n # ms per op forward
+ dtb += (t[2] - t[1]) * 1000 / n # ms per op backward
+
+ s_in = tuple(x.shape) if isinstance(x, torch.Tensor) else 'list'
+ s_out = tuple(y.shape) if isinstance(y, torch.Tensor) else 'list'
+ p = sum(list(x.numel() for x in m.parameters())) if isinstance(m, nn.Module) else 0 # parameters
+ print(f'{p:12}{flops:12.4g}{dtf:16.4g}{dtb:16.4g}{str(s_in):>24s}{str(s_out):>24s}')
+
+
+def is_parallel(model):
+ return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
+
+
+def intersect_dicts(da, db, exclude=()):
+ # Dictionary intersection of matching keys and shapes, omitting 'exclude' keys, using da values
+ return {k: v for k, v in da.items() if k in db and not any(x in k for x in exclude) and v.shape == db[k].shape}
+
+
+def initialize_weights(model):
+ for m in model.modules():
+ t = type(m)
+ if t is nn.Conv2d:
+ pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
+ elif t is nn.BatchNorm2d:
+ m.eps = 1e-3
+ m.momentum = 0.03
+ elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6]:
+ m.inplace = True
+
+
+def find_modules(model, mclass=nn.Conv2d):
+ # Finds layer indices matching module class 'mclass'
+ return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
+
+
+def sparsity(model):
+ # Return global model sparsity
+ a, b = 0., 0.
+ for p in model.parameters():
+ a += p.numel()
+ b += (p == 0).sum()
+ return b / a
+
+
+def prune(model, amount=0.3):
+ # Prune model to requested global sparsity
+ import torch.nn.utils.prune as prune
+ print('Pruning model... ', end='')
+ for name, m in model.named_modules():
+ if isinstance(m, nn.Conv2d):
+ prune.l1_unstructured(m, name='weight', amount=amount) # prune
+ prune.remove(m, 'weight') # make permanent
+ print(' %.3g global sparsity' % sparsity(model))
+
+
+def fuse_conv_and_bn(conv, bn):
+ # Fuse convolution and batchnorm layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
+ fusedconv = nn.Conv2d(conv.in_channels,
+ conv.out_channels,
+ kernel_size=conv.kernel_size,
+ stride=conv.stride,
+ padding=conv.padding,
+ groups=conv.groups,
+ bias=True).requires_grad_(False).to(conv.weight.device)
+
+ # prepare filters
+ w_conv = conv.weight.clone().view(conv.out_channels, -1)
+ w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
+ fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
+
+ # prepare spatial bias
+ b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
+ b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
+ fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
+
+ return fusedconv
+
+
+def model_info(model, verbose=False, img_size=640):
+ # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
+ n_p = sum(x.numel() for x in model.parameters()) # number parameters
+ n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
+ if verbose:
+ print('%5s %40s %9s %12s %20s %10s %10s' % ('layer', 'name', 'gradient', 'parameters', 'shape', 'mu', 'sigma'))
+ for i, (name, p) in enumerate(model.named_parameters()):
+ name = name.replace('module_list.', '')
+ print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
+ (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
+
+ try: # FLOPS
+ from thop import profile
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32
+ img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input
+ flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPS
+ img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float
+ fs = ', %.1f GFLOPS' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPS
+ except (ImportError, Exception):
+ fs = ''
+
+ logger.info(f"Model Summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
+
+
+def load_classifier(name='resnet101', n=2):
+ # Loads a pretrained model reshaped to n-class output
+ model = torchvision.models.__dict__[name](pretrained=True)
+
+ # ResNet model properties
+ # input_size = [3, 224, 224]
+ # input_space = 'RGB'
+ # input_range = [0, 1]
+ # mean = [0.485, 0.456, 0.406]
+ # std = [0.229, 0.224, 0.225]
+
+ # Reshape output to n classes
+ filters = model.fc.weight.shape[1]
+ model.fc.bias = nn.Parameter(torch.zeros(n), requires_grad=True)
+ model.fc.weight = nn.Parameter(torch.zeros(n, filters), requires_grad=True)
+ model.fc.out_features = n
+ return model
+
+
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # scales img(bs,3,y,x) by ratio constrained to gs-multiple
+ if ratio == 1.0:
+ return img
+ else:
+ h, w = img.shape[2:]
+ s = (int(h * ratio), int(w * ratio)) # new size
+ img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
+ if not same_shape: # pad/crop img
+ h, w = [math.ceil(x * ratio / gs) * gs for x in (h, w)]
+ return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
+
+
+def copy_attr(a, b, include=(), exclude=()):
+ # Copy attributes from b to a, options to only include [...] and to exclude [...]
+ for k, v in b.__dict__.items():
+ if (len(include) and k not in include) or k.startswith('_') or k in exclude:
+ continue
+ else:
+ setattr(a, k, v)
+
+
+class ModelEMA:
+ """ Model Exponential Moving Average from https://github.com/rwightman/pytorch-image-models
+ Keep a moving average of everything in the model state_dict (parameters and buffers).
+ This is intended to allow functionality like
+ https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
+ A smoothed version of the weights is necessary for some training schemes to perform well.
+ This class is sensitive where it is initialized in the sequence of model init,
+ GPU assignment and distributed training wrappers.
+ """
+
+ def __init__(self, model, decay=0.9999, updates=0):
+ # Create EMA
+ self.ema = deepcopy(model.module if is_parallel(model) else model).eval() # FP32 EMA
+ # if next(model.parameters()).device.type != 'cpu':
+ # self.ema.half() # FP16 EMA
+ self.updates = updates # number of EMA updates
+ self.decay = lambda x: decay * (1 - math.exp(-x / 2000)) # decay exponential ramp (to help early epochs)
+ for p in self.ema.parameters():
+ p.requires_grad_(False)
+
+ def update(self, model):
+ # Update EMA parameters
+ with torch.no_grad():
+ self.updates += 1
+ d = self.decay(self.updates)
+
+ msd = model.module.state_dict() if is_parallel(model) else model.state_dict() # model state_dict
+ for k, v in self.ema.state_dict().items():
+ if v.dtype.is_floating_point:
+ v *= d
+ v += (1. - d) * msd[k].detach()
+
+ def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
+ # Update EMA attributes
+ copy_attr(self.ema, model, include, exclude)
+
+
+class BatchNormXd(torch.nn.modules.batchnorm._BatchNorm):
+ def _check_input_dim(self, input):
+ # The only difference between BatchNorm1d, BatchNorm2d, BatchNorm3d, etc
+ # is this method that is overwritten by the sub-class
+ # This original goal of this method was for tensor sanity checks
+ # If you're ok bypassing those sanity checks (eg. if you trust your inference
+ # to provide the right dimensional inputs), then you can just use this method
+ # for easy conversion from SyncBatchNorm
+ # (unfortunately, SyncBatchNorm does not store the original class - if it did
+ # we could return the one that was originally created)
+ return
+
+def revert_sync_batchnorm(module):
+ # this is very similar to the function that it is trying to revert:
+ # https://github.com/pytorch/pytorch/blob/c8b3686a3e4ba63dc59e5dcfe5db3430df256833/torch/nn/modules/batchnorm.py#L679
+ module_output = module
+ if isinstance(module, torch.nn.modules.batchnorm.SyncBatchNorm):
+ new_cls = BatchNormXd
+ module_output = BatchNormXd(module.num_features,
+ module.eps, module.momentum,
+ module.affine,
+ module.track_running_stats)
+ if module.affine:
+ with torch.no_grad():
+ module_output.weight = module.weight
+ module_output.bias = module.bias
+ module_output.running_mean = module.running_mean
+ module_output.running_var = module.running_var
+ module_output.num_batches_tracked = module.num_batches_tracked
+ if hasattr(module, "qconfig"):
+ module_output.qconfig = module.qconfig
+ for name, child in module.named_children():
+ module_output.add_module(name, revert_sync_batchnorm(child))
+ del module
+ return module_output
+
+
+class TracedModel(nn.Module):
+
+ def __init__(self, model=None, device=None, img_size=(640,640)):
+ super(TracedModel, self).__init__()
+
+ print(" Convert model to Traced-model... ")
+ self.stride = model.stride
+ self.names = model.names
+ self.model = model
+
+ self.model = revert_sync_batchnorm(self.model)
+ self.model.to('cpu')
+ self.model.eval()
+
+ self.detect_layer = self.model.model[-1]
+ self.model.traced = True
+
+ rand_example = torch.rand(1, 3, img_size, img_size)
+
+ traced_script_module = torch.jit.trace(self.model, rand_example, strict=False)
+ #traced_script_module = torch.jit.script(self.model)
+ traced_script_module.save("traced_model.pt")
+ print(" traced_script_module saved! ")
+ self.model = traced_script_module
+ self.model.to(device)
+ self.detect_layer.to(device)
+ print(" model is traced! \n")
+
+ def forward(self, x, augment=False, profile=False):
+ out = self.model(x)
+ out = self.detect_layer(out)
+ return out
\ No newline at end of file
diff --git a/ipex/utils/wandb_logging/__init__.py b/ipex/utils/wandb_logging/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/ipex/utils/wandb_logging/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/ipex/utils/wandb_logging/log_dataset.py b/ipex/utils/wandb_logging/log_dataset.py
new file mode 100644
index 000000000..74cd6c6cd
--- /dev/null
+++ b/ipex/utils/wandb_logging/log_dataset.py
@@ -0,0 +1,24 @@
+import argparse
+
+import yaml
+
+from wandb_utils import WandbLogger
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ with open(opt.data) as f:
+ data = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ logger = WandbLogger(opt, '', None, data, job_type='Dataset Creation')
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOR', help='name of W&B Project')
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/ipex/utils/wandb_logging/wandb_utils.py b/ipex/utils/wandb_logging/wandb_utils.py
new file mode 100644
index 000000000..aec7c5f48
--- /dev/null
+++ b/ipex/utils/wandb_logging/wandb_utils.py
@@ -0,0 +1,306 @@
+import json
+import sys
+from pathlib import Path
+
+import torch
+import yaml
+from tqdm import tqdm
+
+sys.path.append(str(Path(__file__).parent.parent.parent)) # add utils/ to path
+from utils.datasets import LoadImagesAndLabels
+from utils.datasets import img2label_paths
+from utils.general import colorstr, xywh2xyxy, check_dataset
+
+try:
+ import wandb
+ from wandb import init, finish
+except ImportError:
+ wandb = None
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):
+ return from_string[len(prefix):]
+
+
+def check_wandb_config_file(data_config_file):
+ wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path
+ if Path(wandb_config).is_file():
+ return wandb_config
+ return data_config_file
+
+
+def get_run_info(run_path):
+ run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))
+ run_id = run_path.stem
+ project = run_path.parent.stem
+ model_artifact_name = 'run_' + run_id + '_model'
+ return run_id, project, model_artifact_name
+
+
+def check_wandb_resume(opt):
+ process_wandb_config_ddp_mode(opt) if opt.global_rank not in [-1, 0] else None
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ if opt.global_rank not in [-1, 0]: # For resuming DDP runs
+ run_id, project, model_artifact_name = get_run_info(opt.resume)
+ api = wandb.Api()
+ artifact = api.artifact(project + '/' + model_artifact_name + ':latest')
+ modeldir = artifact.download()
+ opt.weights = str(Path(modeldir) / "last.pt")
+ return True
+ return None
+
+
+def process_wandb_config_ddp_mode(opt):
+ with open(opt.data) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ train_dir, val_dir = None, None
+ if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)
+ train_dir = train_artifact.download()
+ train_path = Path(train_dir) / 'data/images/'
+ data_dict['train'] = str(train_path)
+
+ if isinstance(data_dict['val'], str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ val_artifact = api.artifact(remove_prefix(data_dict['val']) + ':' + opt.artifact_alias)
+ val_dir = val_artifact.download()
+ val_path = Path(val_dir) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ if train_dir or val_dir:
+ ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')
+ with open(ddp_data_path, 'w') as f:
+ yaml.dump(data_dict, f)
+ opt.data = ddp_data_path
+
+
+class WandbLogger():
+ def __init__(self, opt, name, run_id, data_dict, job_type='Training'):
+ # Pre-training routine --
+ self.job_type = job_type
+ self.wandb, self.wandb_run, self.data_dict = wandb, None if not wandb else wandb.run, data_dict
+ # It's more elegant to stick to 1 wandb.init call, but useful config data is overwritten in the WandbLogger's wandb.init call
+ if isinstance(opt.resume, str): # checks resume from artifact
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ run_id, project, model_artifact_name = get_run_info(opt.resume)
+ model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name
+ assert wandb, 'install wandb to resume wandb runs'
+ # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config
+ self.wandb_run = wandb.init(id=run_id, project=project, resume='allow')
+ opt.resume = model_artifact_name
+ elif self.wandb:
+ self.wandb_run = wandb.init(config=opt,
+ resume="allow",
+ project='YOLOR' if opt.project == 'runs/train' else Path(opt.project).stem,
+ name=name,
+ job_type=job_type,
+ id=run_id) if not wandb.run else wandb.run
+ if self.wandb_run:
+ if self.job_type == 'Training':
+ if not opt.resume:
+ wandb_data_dict = self.check_and_upload_dataset(opt) if opt.upload_dataset else data_dict
+ # Info useful for resuming from artifacts
+ self.wandb_run.config.opt = vars(opt)
+ self.wandb_run.config.data_dict = wandb_data_dict
+ self.data_dict = self.setup_training(opt, data_dict)
+ if self.job_type == 'Dataset Creation':
+ self.data_dict = self.check_and_upload_dataset(opt)
+ else:
+ prefix = colorstr('wandb: ')
+ print(f"{prefix}Install Weights & Biases for YOLOR logging with 'pip install wandb' (recommended)")
+
+ def check_and_upload_dataset(self, opt):
+ assert wandb, 'Install wandb to upload dataset'
+ check_dataset(self.data_dict)
+ config_path = self.log_dataset_artifact(opt.data,
+ opt.single_cls,
+ 'YOLOR' if opt.project == 'runs/train' else Path(opt.project).stem)
+ print("Created dataset config file ", config_path)
+ with open(config_path) as f:
+ wandb_data_dict = yaml.load(f, Loader=yaml.SafeLoader)
+ return wandb_data_dict
+
+ def setup_training(self, opt, data_dict):
+ self.log_dict, self.current_epoch, self.log_imgs = {}, 0, 16 # Logging Constants
+ self.bbox_interval = opt.bbox_interval
+ if isinstance(opt.resume, str):
+ modeldir, _ = self.download_model_artifact(opt)
+ if modeldir:
+ self.weights = Path(modeldir) / "last.pt"
+ config = self.wandb_run.config
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp = str(
+ self.weights), config.save_period, config.total_batch_size, config.bbox_interval, config.epochs, \
+ config.opt['hyp']
+ data_dict = dict(self.wandb_run.config.data_dict) # eliminates the need for config file to resume
+ if 'val_artifact' not in self.__dict__: # If --upload_dataset is set, use the existing artifact, don't download
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(data_dict.get('train'),
+ opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(data_dict.get('val'),
+ opt.artifact_alias)
+ self.result_artifact, self.result_table, self.val_table, self.weights = None, None, None, None
+ if self.train_artifact_path is not None:
+ train_path = Path(self.train_artifact_path) / 'data/images/'
+ data_dict['train'] = str(train_path)
+ if self.val_artifact_path is not None:
+ val_path = Path(self.val_artifact_path) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ self.val_table = self.val_artifact.get("val")
+ self.map_val_table_path()
+ if self.val_artifact is not None:
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+ self.result_table = wandb.Table(["epoch", "id", "prediction", "avg_confidence"])
+ if opt.bbox_interval == -1:
+ self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ return data_dict
+
+ def download_dataset_artifact(self, path, alias):
+ if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):
+ dataset_artifact = wandb.use_artifact(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + ":" + alias)
+ assert dataset_artifact is not None, "'Error: W&B dataset artifact doesn\'t exist'"
+ datadir = dataset_artifact.download()
+ return datadir, dataset_artifact
+ return None, None
+
+ def download_model_artifact(self, opt):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
+ assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
+ modeldir = model_artifact.download()
+ epochs_trained = model_artifact.metadata.get('epochs_trained')
+ total_epochs = model_artifact.metadata.get('total_epochs')
+ assert epochs_trained < total_epochs, 'training to %g epochs is finished, nothing to resume.' % (
+ total_epochs)
+ return modeldir, model_artifact
+ return None, None
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model', type='model', metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score
+ })
+ model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
+ wandb.log_artifact(model_artifact,
+ aliases=['latest', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
+ print("Saving model artifact on epoch ", epoch + 1)
+
+ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):
+ with open(data_file) as f:
+ data = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])
+ names = {k: v for k, v in enumerate(names)} # to index dictionary
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['train']), names, name='train') if data.get('train') else None
+ self.val_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['val']), names, name='val') if data.get('val') else None
+ if data.get('train'):
+ data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
+ if data.get('val'):
+ data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
+ path = data_file if overwrite_config else '_wandb.'.join(data_file.rsplit('.', 1)) # updated data.yaml path
+ data.pop('download', None)
+ with open(path, 'w') as f:
+ yaml.dump(data, f)
+
+ if self.job_type == 'Training': # builds correct artifact pipeline graph
+ self.wandb_run.use_artifact(self.val_artifact)
+ self.wandb_run.use_artifact(self.train_artifact)
+ self.val_artifact.wait()
+ self.val_table = self.val_artifact.get('val')
+ self.map_val_table_path()
+ else:
+ self.wandb_run.log_artifact(self.train_artifact)
+ self.wandb_run.log_artifact(self.val_artifact)
+ return path
+
+ def map_val_table_path(self):
+ self.val_table_map = {}
+ print("Mapping dataset")
+ for i, data in enumerate(tqdm(self.val_table.data)):
+ self.val_table_map[data[3]] = data[0]
+
+ def create_dataset_table(self, dataset, class_to_id, name='dataset'):
+ # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
+ artifact = wandb.Artifact(name=name, type="dataset")
+ img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
+ img_files = tqdm(dataset.img_files) if not img_files else img_files
+ for img_file in img_files:
+ if Path(img_file).is_dir():
+ artifact.add_dir(img_file, name='data/images')
+ labels_path = 'labels'.join(dataset.path.rsplit('images', 1))
+ artifact.add_dir(labels_path, name='data/labels')
+ else:
+ artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
+ label_file = Path(img2label_paths([img_file])[0])
+ artifact.add_file(str(label_file),
+ name='data/labels/' + label_file.name) if label_file.exists() else None
+ table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
+ for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
+ height, width = shapes[0]
+ labels[:, 2:] = (xywh2xyxy(labels[:, 2:].view(-1, 4))) * torch.Tensor([width, height, width, height])
+ box_data, img_classes = [], {}
+ for cls, *xyxy in labels[:, 1:].tolist():
+ cls = int(cls)
+ box_data.append({"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls]),
+ "scores": {"acc": 1},
+ "domain": "pixel"})
+ img_classes[cls] = class_to_id[cls]
+ boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
+ table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), json.dumps(img_classes),
+ Path(paths).name)
+ artifact.add(table, name)
+ return artifact
+
+ def log_training_progress(self, predn, path, names):
+ if self.val_table and self.result_table:
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])
+ box_data = []
+ total_conf = 0
+ for *xyxy, conf, cls in predn.tolist():
+ if conf >= 0.25:
+ box_data.append(
+ {"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": "%s %.3f" % (names[cls], conf),
+ "scores": {"class_score": conf},
+ "domain": "pixel"})
+ total_conf = total_conf + conf
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ id = self.val_table_map[Path(path).name]
+ self.result_table.add_data(self.current_epoch,
+ id,
+ wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
+ total_conf / max(1, len(box_data))
+ )
+
+ def log(self, log_dict):
+ if self.wandb_run:
+ for key, value in log_dict.items():
+ self.log_dict[key] = value
+
+ def end_epoch(self, best_result=False):
+ if self.wandb_run:
+ wandb.log(self.log_dict)
+ self.log_dict = {}
+ if self.result_artifact:
+ train_results = wandb.JoinedTable(self.val_table, self.result_table, "id")
+ self.result_artifact.add(train_results, 'result')
+ wandb.log_artifact(self.result_artifact, aliases=['latest', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
+ self.result_table = wandb.Table(["epoch", "id", "prediction", "avg_confidence"])
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+
+ def finish_run(self):
+ if self.wandb_run:
+ if self.log_dict:
+ wandb.log(self.log_dict)
+ wandb.run.finish()
diff --git a/ipex/yolov7-seg.pt b/ipex/yolov7-seg.pt
new file mode 100644
index 000000000..80a4d6e01
Binary files /dev/null and b/ipex/yolov7-seg.pt differ
diff --git a/ipex/yolov7.pt b/ipex/yolov7.pt
new file mode 100644
index 000000000..f52d35444
Binary files /dev/null and b/ipex/yolov7.pt differ
diff --git a/oneAPI_ODAV_APP/Data/Data/sample.json b/oneAPI_ODAV_APP/Data/Data/sample.json
new file mode 100644
index 000000000..98a2e69e0
--- /dev/null
+++ b/oneAPI_ODAV_APP/Data/Data/sample.json
@@ -0,0 +1,17 @@
+{
+ "data": [
+ {
+ "userid": "raj713335",
+ "image_url": "Data/Saved_Images/20230608190900.jpg",
+ "w_cord": 0.5150375939849624,
+ "x_cord": 0.5583333333333333,
+ "y_cord": 0.6511278195488722,
+ "z_cord": 0.32,
+ "latitude": 22.529,
+ "longitude": 88.368,
+ "class_of_image": 2,
+ "auto": "No",
+ "uploaded": "No"
+ }
+ ]
+}
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/Data/Images/Background/background.jpg b/oneAPI_ODAV_APP/Data/Images/Background/background.jpg
new file mode 100644
index 000000000..a9e483604
Binary files /dev/null and b/oneAPI_ODAV_APP/Data/Images/Background/background.jpg differ
diff --git a/oneAPI_ODAV_APP/Data/Images/Background/background_2.jpg b/oneAPI_ODAV_APP/Data/Images/Background/background_2.jpg
new file mode 100644
index 000000000..71e80433c
Binary files /dev/null and b/oneAPI_ODAV_APP/Data/Images/Background/background_2.jpg differ
diff --git a/oneAPI_ODAV_APP/Data/Images/Background/load.gif b/oneAPI_ODAV_APP/Data/Images/Background/load.gif
new file mode 100644
index 000000000..0d94ca727
Binary files /dev/null and b/oneAPI_ODAV_APP/Data/Images/Background/load.gif differ
diff --git a/oneAPI_ODAV_APP/Data/Images/Background/logo.png b/oneAPI_ODAV_APP/Data/Images/Background/logo.png
new file mode 100644
index 000000000..9b4ba7a39
Binary files /dev/null and b/oneAPI_ODAV_APP/Data/Images/Background/logo.png differ
diff --git a/oneAPI_ODAV_APP/Data/Images/Background/no_image.jpg b/oneAPI_ODAV_APP/Data/Images/Background/no_image.jpg
new file mode 100644
index 000000000..0d85156cc
Binary files /dev/null and b/oneAPI_ODAV_APP/Data/Images/Background/no_image.jpg differ
diff --git a/oneAPI_ODAV_APP/Data/Images/icons/favicon.ico b/oneAPI_ODAV_APP/Data/Images/icons/favicon.ico
new file mode 100644
index 000000000..6f55c8a52
Binary files /dev/null and b/oneAPI_ODAV_APP/Data/Images/icons/favicon.ico differ
diff --git a/oneAPI_ODAV_APP/Data/Keys/config.ini b/oneAPI_ODAV_APP/Data/Keys/config.ini
new file mode 100644
index 000000000..7517444db
--- /dev/null
+++ b/oneAPI_ODAV_APP/Data/Keys/config.ini
@@ -0,0 +1,4 @@
+[TOKEN]
+token = 1362521589:AAETxO9b_8NLgVpCVe4yD4I5q9U2SwPeYbw
+up_url = raj713335
+
diff --git a/oneAPI_ODAV_APP/Data/Keys/pyinstallerx.txt b/oneAPI_ODAV_APP/Data/Keys/pyinstallerx.txt
new file mode 100644
index 000000000..e9f03365f
--- /dev/null
+++ b/oneAPI_ODAV_APP/Data/Keys/pyinstallerx.txt
@@ -0,0 +1 @@
+pyinstaller -i "favicon.ico" --onefile -w --hiddenimport=EasyTkinter --hiddenimport=Pillow --hiddenimport=opencv-python --hiddenimport=requests--hiddenimport=Configparser --hiddenimport=PyAutoGUI --hiddenimport=numpy --hiddenimport=pandas --hiddenimport=urllib3 --hiddenimport=tensorflow --hiddenimport=scikit-learn --hiddenimport=wget --hiddenimport=pygame --hiddenimport=dlib --hiddenimport=imutils --hiddenimport=deepface --hiddenimport=keras --hiddenimport=cvlib --name Neom home.py
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/Data/Saved_Images/20230608190900.jpg b/oneAPI_ODAV_APP/Data/Saved_Images/20230608190900.jpg
new file mode 100644
index 000000000..e37eaf7a0
Binary files /dev/null and b/oneAPI_ODAV_APP/Data/Saved_Images/20230608190900.jpg differ
diff --git a/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM.py b/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM.py
new file mode 100644
index 000000000..a6a23d7f0
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM.py
@@ -0,0 +1,252 @@
+import torch
+
+def AI_DASH_CAM(source="0", model_weights="../Model/yolov7.pt"):
+
+ import random
+ import numpy as np
+ import cv2
+ from datetime import datetime
+ import torch
+ import torch.backends.cudnn as cudnn
+
+ from models.experimental import attempt_load
+ from utils.datasets import LoadStreams, LoadImages
+ from utils.general import check_img_size, check_requirements, check_imshow, non_max_suppression, apply_classifier, \
+ scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path
+ from utils.plots import plot_one_box
+ from utils.torch_utils import select_device, load_classifier, time_synchronized, TracedModel
+
+ device = 'cuda' if torch.cuda.is_available() else 'cpu'
+ weights = model_weights
+ img_size = 640
+ iou_thres = 0.45
+ conf_thres = 0.5
+
+ font = cv2.FONT_HERSHEY_SIMPLEX
+
+ webcam = source.isnumeric()
+
+ # Initialize
+ set_logging()
+ device = select_device(device)
+ half = device.type != 'cpu' # half precision only supported on CUDA
+
+ # Load model
+ model = attempt_load(weights, map_location=device) # load FP32 model
+ stride = int(model.stride.max()) # model stride
+ imgsz = check_img_size(img_size, s=stride) # check img_size
+
+ if half:
+ model.half() # to FP16
+
+ # Set Dataloader
+ if webcam:
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride)
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride)
+
+ # Get names and colors
+ names = model.module.names if hasattr(model, 'module') else model.names
+
+ # colors = [(255, 255, 255), (255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255), (255, 0, 255)
+ # , (155, 255, 100), (255, 155, 100), (155, 100, 255), (155, 155, 100)]
+
+ colors = [[random.randint(0, 255) for _ in range(3)] for _ in names]
+
+ colors[0:11] = [(255, 255, 255), (255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255), (255, 0, 255)
+ , (155, 255, 100), (255, 155, 100), (155, 100, 255), (155, 155, 100)]
+
+ # Run inference
+ if device.type != 'cpu':
+ model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
+ old_img_w = old_img_h = imgsz
+ old_img_b = 1
+
+ TOTAL = 0
+ person = 0
+ bicycle = 0
+ car = 0
+ motorcycle = 0
+ bus = 0
+ truck = 0
+ traffic_light = 0
+ stop_sign = 0
+ parking_meter = 0
+ potted_plant = 0
+ clock = 0
+
+
+ for path, img, im0s, vid_cap in dataset:
+
+ img = torch.from_numpy(img).to(device)
+ img = img.half() if half else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ if img.ndimension() == 3:
+ img = img.unsqueeze(0)
+
+ # Warmup
+ if device.type != 'cpu' and (
+ old_img_b != img.shape[0] or old_img_h != img.shape[2] or old_img_w != img.shape[3]):
+ old_img_b = img.shape[0]
+ old_img_h = img.shape[2]
+ old_img_w = img.shape[3]
+
+ with torch.no_grad(): # Calculating gradients would cause a GPU memory leak
+ pred = model(img)[0]
+
+ # Apply NMS
+ pred = non_max_suppression(pred, conf_thres, iou_thres)
+
+ # Process detections
+ current_frame = 0
+ for i, det in enumerate(pred): # detections per image
+
+ if webcam: # batch_size >= 1
+ p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.count
+ else:
+ p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)
+
+ im0 = cv2.resize(im0, (640, 480))
+
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
+
+ for c in det[:, -1].unique():
+ n = (det[:, -1] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ label = f'{names[int(cls)]} {conf:.2f}'
+ TOTAL += 1
+ labelx = names[int(cls)]
+ current_frame += 1
+ #plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=1)
+ if labelx == 'person':
+ plot_one_box(xyxy, im0, label=label, color=colors[0], line_thickness=1)
+ person += 1
+ elif labelx == 'bicycle':
+ plot_one_box(xyxy, im0, label=label, color=colors[1], line_thickness=1)
+ bicycle += 1
+ elif labelx == 'car':
+ plot_one_box(xyxy, im0, label=label, color=colors[2], line_thickness=1)
+ car += 1
+ elif labelx == 'motorcycle':
+ plot_one_box(xyxy, im0, label=label, color=colors[3], line_thickness=1)
+ motorcycle += 1
+ elif labelx == 'bus':
+ plot_one_box(xyxy, im0, label=label, color=colors[4], line_thickness=1)
+ bus += 1
+ elif labelx == 'truck':
+ plot_one_box(xyxy, im0, label=label, color=colors[5], line_thickness=1)
+ truck += 1
+ elif labelx == 'traffic light':
+ plot_one_box(xyxy, im0, label=label, color=colors[6], line_thickness=1)
+ traffic_light += 1
+ elif labelx == 'stop sign':
+ plot_one_box(xyxy, im0, label=label, color=colors[7], line_thickness=1)
+ stop_sign += 1
+ elif labelx == 'parking meter':
+ plot_one_box(xyxy, im0, label=label, color=colors[8], line_thickness=1)
+ parking_meter += 1
+ elif labelx == 'potted plant':
+ plot_one_box(xyxy, im0, label=label, color=colors[9], line_thickness=1)
+ potted_plant += 1
+ elif labelx == 'clock':
+ plot_one_box(xyxy, im0, label=label, color=colors[10], line_thickness=1)
+ clock += 1
+ else:
+ plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=1)
+
+
+
+ (H, W) = im0.shape[:2]
+
+ print(" ")
+
+
+ cv2.putText(im0, "oneAPI ODAV", (250, 40),
+ font, 0.7 * 1, (0, 255, 0), 2)
+ cv2.rectangle(im0, (20, 50), (W - 20, 15), (0, 255, 0), 2)
+
+
+
+
+ sub_img = im0[H - 300: H, 0:200]
+ black_rect = np.ones(sub_img.shape, dtype=np.uint8) * 0
+
+ res = cv2.addWeighted(sub_img, 0.8, black_rect, 0.2, 1.0)
+
+ im0[H - 300:H + 40, 0:200] = res
+
+ cv2.putText(im0, str("PERSON: " + str(person)), (30, H - 280),
+ font, 0.4 * 1, colors[0], 1)
+ cv2.rectangle(im0, (10, H - 280), (20, H-285), colors[0], 7)
+
+ cv2.putText(im0, str("BICYCLE: " + str(bicycle)), (30, H - 255),
+ font, 0.4 * 1, colors[1], 1)
+ cv2.rectangle(im0, (10, H - 255), (20, H - 260), colors[1], 7)
+
+ cv2.putText(im0, str("CAR: " + str(car)), (30, H - 230),
+ font, 0.4 * 1, colors[2], 1)
+ cv2.rectangle(im0, (10, H - 230), (20, H - 235), colors[2], 7)
+
+ cv2.putText(im0, str("MOTORCYCLE: " + str(motorcycle)), (30, H - 205),
+ font, 0.4 * 1, colors[3], 1)
+ cv2.rectangle(im0, (10, H - 205), (20, H - 210), colors[3], 7)
+
+ cv2.putText(im0, str("BUS: " + str(bus)), (30, H - 180),
+ font, 0.4 * 1, colors[4], 1)
+ cv2.rectangle(im0, (10, H - 180), (20, H - 185), colors[4], 7)
+
+ cv2.putText(im0, str("TRUCK: " + str(truck)), (30, H - 155),
+ font, 0.4 * 1, colors[5], 1)
+ cv2.rectangle(im0, (10, H - 155), (20, H - 160), colors[5], 7)
+
+ cv2.putText(im0, str("TRAFFIC LIGHT: " + str(traffic_light)), (30, H - 130),
+ font, 0.4 * 1, colors[6], 1)
+ cv2.rectangle(im0, (10, H - 130), (20, H - 135), colors[6], 7)
+
+ cv2.putText(im0, str("STOP SIGN: " + str(stop_sign)), (30, H - 105),
+ font, 0.4 * 1, colors[7], 1)
+ cv2.rectangle(im0, (10, H - 105), (20, H - 100), colors[7], 7)
+
+ cv2.putText(im0, str("PARKING METER: " + str(parking_meter)), (30, H - 80),
+ font, 0.4 * 1, colors[8], 1)
+ cv2.rectangle(im0, (10, H - 80), (20, H - 85), colors[8], 7)
+
+ cv2.putText(im0, str("POTTED PLANT: " + str(potted_plant)), (30, H - 55),
+ font, 0.4 * 1, colors[9], 1)
+ cv2.rectangle(im0, (10, H - 55), (20, H - 60), colors[9], 7)
+
+ cv2.putText(im0, str("CLOCK: " + str(clock)), (30, H - 30),
+ font, 0.4 * 1, colors[10], 1)
+ cv2.rectangle(im0, (10, H - 30), (20, H - 35), colors[10], 7)
+
+ cv2.putText(im0, str("TOTAL: " + str(TOTAL)), (30, H - 5),
+ font, 0.4 * 1, (0, 0, 0), 1)
+
+ cv2.putText(im0, str("CURRENT FRAME: " + str(current_frame)), (W - 225, H - 35),
+ font, 0.7 * 1, (0, 0, 255), 2)
+
+ now = datetime.now()
+
+ timex = str(now.strftime("%d/%m/%Y %H:%M:%S"))
+ cv2.putText(im0, timex, (W - 200, H - 10),
+ font, 0.5 * 1, (255, 255, 255), 1)
+
+ cv2.namedWindow("Output", cv2.WINDOW_NORMAL)
+ cv2.setWindowProperty("Output", cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN)
+ cv2.imshow("Output", im0)
+
+ if (cv2.waitKey(1) & 0xFF == ord('q')):
+ break
+
+
+ cv2.destroyAllWindows()
+
+# if __name__ == '__main__':
+# with torch.no_grad():
+# AI_DASH_CAM("../TEST_VIDEO/Visual_Pollution.mp4")
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM_IMAGE.py b/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM_IMAGE.py
new file mode 100644
index 000000000..3c86fa575
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM_IMAGE.py
@@ -0,0 +1,249 @@
+import torch
+
+def AI_DASH_CAM_IMAGE(source="0", model_weights="../Model/yolov7.pt"):
+
+ import random
+ import numpy as np
+ import cv2
+ from datetime import datetime
+ import torch
+ import torch.backends.cudnn as cudnn
+
+ from models.experimental import attempt_load
+ from utils.datasets import LoadStreams, LoadImages
+ from utils.general import check_img_size, check_requirements, check_imshow, non_max_suppression, apply_classifier, \
+ scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path
+ from utils.plots import plot_one_box
+ from utils.torch_utils import select_device, load_classifier, time_synchronized, TracedModel
+
+ device = 'cuda' if torch.cuda.is_available() else 'cpu'
+ weights = model_weights
+ img_size = 640
+ iou_thres = 0.45
+ conf_thres = 0.5
+
+ font = cv2.FONT_HERSHEY_SIMPLEX
+
+ webcam = source.isnumeric()
+
+ # Initialize
+ set_logging()
+ device = select_device(device)
+ half = device.type != 'cpu' # half precision only supported on CUDA
+
+ # Load model
+ model = attempt_load(weights, map_location=device) # load FP32 model
+ stride = int(model.stride.max()) # model stride
+ imgsz = check_img_size(img_size, s=stride) # check img_size
+
+ if half:
+ model.half() # to FP16
+
+ # Set Dataloader
+ if webcam:
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride)
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride)
+
+ # Get names and colors
+ names = model.module.names if hasattr(model, 'module') else model.names
+
+ # colors = [(255, 255, 255), (255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255), (255, 0, 255)
+ # , (155, 255, 100), (255, 155, 100), (155, 100, 255), (155, 155, 100)]
+
+ colors = [[random.randint(0, 255) for _ in range(3)] for _ in names]
+
+ colors[0:11] = [(255, 255, 255), (255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255), (255, 0, 255)
+ , (155, 255, 100), (255, 155, 100), (155, 100, 255), (155, 155, 100)]
+
+ # Run inference
+ if device.type != 'cpu':
+ model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
+ old_img_w = old_img_h = imgsz
+ old_img_b = 1
+
+ TOTAL = 0
+ person = 0
+ bicycle = 0
+ car = 0
+ motorcycle = 0
+ bus = 0
+ truck = 0
+ traffic_light = 0
+ stop_sign = 0
+ parking_meter = 0
+ potted_plant = 0
+ clock = 0
+
+
+ for path, img, im0s, vid_cap in dataset:
+
+ img = torch.from_numpy(img).to(device)
+ img = img.half() if half else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ if img.ndimension() == 3:
+ img = img.unsqueeze(0)
+
+ # Warmup
+ if device.type != 'cpu' and (
+ old_img_b != img.shape[0] or old_img_h != img.shape[2] or old_img_w != img.shape[3]):
+ old_img_b = img.shape[0]
+ old_img_h = img.shape[2]
+ old_img_w = img.shape[3]
+
+ with torch.no_grad(): # Calculating gradients would cause a GPU memory leak
+ pred = model(img)[0]
+
+ # Apply NMS
+ pred = non_max_suppression(pred, conf_thres, iou_thres)
+
+ # Process detections
+ current_frame = 0
+ for i, det in enumerate(pred): # detections per image
+
+ if webcam: # batch_size >= 1
+ p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.count
+ else:
+ p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)
+
+ im0 = cv2.resize(im0, (640, 480))
+
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
+
+ for c in det[:, -1].unique():
+ n = (det[:, -1] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ label = f'{names[int(cls)]} {conf:.2f}'
+ TOTAL += 1
+ labelx = names[int(cls)]
+ current_frame += 1
+ # plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=1)
+ if labelx == 'person':
+ plot_one_box(xyxy, im0, label=label, color=colors[0], line_thickness=1)
+ person += 1
+ elif labelx == 'bicycle':
+ plot_one_box(xyxy, im0, label=label, color=colors[1], line_thickness=1)
+ bicycle += 1
+ elif labelx == 'car':
+ plot_one_box(xyxy, im0, label=label, color=colors[2], line_thickness=1)
+ car += 1
+ elif labelx == 'motorcycle':
+ plot_one_box(xyxy, im0, label=label, color=colors[3], line_thickness=1)
+ motorcycle += 1
+ elif labelx == 'bus':
+ plot_one_box(xyxy, im0, label=label, color=colors[4], line_thickness=1)
+ bus += 1
+ elif labelx == 'truck':
+ plot_one_box(xyxy, im0, label=label, color=colors[5], line_thickness=1)
+ truck += 1
+ elif labelx == 'traffic light':
+ plot_one_box(xyxy, im0, label=label, color=colors[6], line_thickness=1)
+ traffic_light += 1
+ elif labelx == 'stop sign':
+ plot_one_box(xyxy, im0, label=label, color=colors[7], line_thickness=1)
+ stop_sign += 1
+ elif labelx == 'parking meter':
+ plot_one_box(xyxy, im0, label=label, color=colors[8], line_thickness=1)
+ parking_meter += 1
+ elif labelx == 'potted plant':
+ plot_one_box(xyxy, im0, label=label, color=colors[9], line_thickness=1)
+ potted_plant += 1
+ elif labelx == 'clock':
+ plot_one_box(xyxy, im0, label=label, color=colors[10], line_thickness=1)
+ clock += 1
+ else:
+ plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=1)
+
+ (H, W) = im0.shape[:2]
+
+ print(" ")
+
+
+ cv2.putText(im0, "oneAPI ODAV", (250, 40),
+ font, 0.7 * 1, (255, 255, 255), 2)
+ cv2.rectangle(im0, (20, 50), (W - 20, 15), (255, 255, 255), 2)
+
+
+
+
+ sub_img = im0[H - 300: H, 0:200]
+ black_rect = np.ones(sub_img.shape, dtype=np.uint8) * 0
+
+ res = cv2.addWeighted(sub_img, 0.8, black_rect, 0.2, 1.0)
+
+ im0[H - 300:H + 40, 0:200] = res
+
+ cv2.putText(im0, str("PERSON: " + str(person)), (30, H - 280),
+ font, 0.4 * 1, colors[0], 1)
+ cv2.rectangle(im0, (10, H - 280), (20, H - 285), colors[0], 7)
+
+ cv2.putText(im0, str("BICYCLE: " + str(bicycle)), (30, H - 255),
+ font, 0.4 * 1, colors[1], 1)
+ cv2.rectangle(im0, (10, H - 255), (20, H - 260), colors[1], 7)
+
+ cv2.putText(im0, str("CAR: " + str(car)), (30, H - 230),
+ font, 0.4 * 1, colors[2], 1)
+ cv2.rectangle(im0, (10, H - 230), (20, H - 235), colors[2], 7)
+
+ cv2.putText(im0, str("MOTORCYCLE: " + str(motorcycle)), (30, H - 205),
+ font, 0.4 * 1, colors[3], 1)
+ cv2.rectangle(im0, (10, H - 205), (20, H - 210), colors[3], 7)
+
+ cv2.putText(im0, str("BUS: " + str(bus)), (30, H - 180),
+ font, 0.4 * 1, colors[4], 1)
+ cv2.rectangle(im0, (10, H - 180), (20, H - 185), colors[4], 7)
+
+ cv2.putText(im0, str("TRUCK: " + str(truck)), (30, H - 155),
+ font, 0.4 * 1, colors[5], 1)
+ cv2.rectangle(im0, (10, H - 155), (20, H - 160), colors[5], 7)
+
+ cv2.putText(im0, str("TRAFFIC LIGHT: " + str(traffic_light)), (30, H - 130),
+ font, 0.4 * 1, colors[6], 1)
+ cv2.rectangle(im0, (10, H - 130), (20, H - 135), colors[6], 7)
+
+ cv2.putText(im0, str("STOP SIGN: " + str(stop_sign)), (30, H - 105),
+ font, 0.4 * 1, colors[7], 1)
+ cv2.rectangle(im0, (10, H - 105), (20, H - 100), colors[7], 7)
+
+ cv2.putText(im0, str("PARKING METER: " + str(parking_meter)), (30, H - 80),
+ font, 0.4 * 1, colors[8], 1)
+ cv2.rectangle(im0, (10, H - 80), (20, H - 85), colors[8], 7)
+
+ cv2.putText(im0, str("POTTED PLANT: " + str(potted_plant)), (30, H - 55),
+ font, 0.4 * 1, colors[9], 1)
+ cv2.rectangle(im0, (10, H - 55), (20, H - 60), colors[9], 7)
+
+ cv2.putText(im0, str("CLOCK: " + str(clock)), (30, H - 30),
+ font, 0.4 * 1, colors[10], 1)
+ cv2.rectangle(im0, (10, H - 30), (20, H - 35), colors[10], 7)
+
+ cv2.putText(im0, str("TOTAL: " + str(TOTAL)), (30, H - 5),
+ font, 0.4 * 1, (0, 0, 0), 1)
+
+ cv2.putText(im0, str("CURRENT FRAME: " + str(current_frame)), (W - 225, H - 35),
+ font, 0.7 * 1, (0, 0, 255), 2)
+
+ now = datetime.now()
+
+ timex = str(now.strftime("%d/%m/%Y %H:%M:%S"))
+ cv2.putText(im0, timex, (W - 200, H - 10),
+ font, 0.5 * 1, (255, 255, 255), 1)
+
+ cv2.namedWindow("Output", cv2.WINDOW_NORMAL)
+ cv2.setWindowProperty("Output", cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN)
+ cv2.imshow("Output", im0)
+
+ cv2.waitKey(5000)
+
+
+ cv2.destroyAllWindows()
+
+# if __name__ == '__main__':
+# with torch.no_grad():
+# AI_DASH_CAM_IMAGE("../TEST_VIDEO/test3.png")
diff --git a/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM_SEG.py b/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM_SEG.py
new file mode 100644
index 000000000..5982f19cd
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM_SEG.py
@@ -0,0 +1,245 @@
+import torch
+
+def AI_DASH_CAM_SEG(source="0", model_weights="../Model/yolov7.pt"):
+
+ import matplotlib.pyplot as plt
+ import torch
+ import cv2
+ import yaml
+ from torchvision import transforms
+ import numpy as np
+
+ from utils.datasets import letterbox
+ from utils.general import non_max_suppression_mask_conf
+
+ from detectron2.modeling.poolers import ROIPooler
+ from detectron2.structures import Boxes
+ from detectron2.utils.memory import retry_if_cuda_oom
+ from detectron2.layers import paste_masks_in_image
+
+ device = 'cuda' if torch.cuda.is_available() else 'cpu'
+ weights = model_weights
+ img_size = 640
+ iou_thres = 0.45
+ conf_thres = 0.5
+
+ font = cv2.FONT_HERSHEY_SIMPLEX
+
+ webcam = source.isnumeric()
+
+ # Initialize
+ set_logging()
+ device = select_device(device)
+ half = device.type != 'cpu' # half precision only supported on CUDA
+
+ # Load model
+ model = attempt_load(weights, map_location=device) # load FP32 model
+ stride = int(model.stride.max()) # model stride
+ imgsz = check_img_size(img_size, s=stride) # check img_size
+
+ if half:
+ model.half() # to FP16
+
+ # Set Dataloader
+ if webcam:
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride)
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride)
+
+ # Get names and colors
+ names = model.module.names if hasattr(model, 'module') else model.names
+
+ colors = [(255, 255, 255), (255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255), (255, 0, 255)
+ , (155, 255, 100), (255, 155, 100), (155, 100, 255), (155, 155, 100)]
+
+ # Run inference
+ if device.type != 'cpu':
+ model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
+ old_img_w = old_img_h = imgsz
+ old_img_b = 1
+
+ TOTAL = 0
+ GRAFFITI = 0
+ FADED_SIGNAGE = 0
+ POTHOLES = 0
+ GARBAGE = 0
+ CONSTRUCTION_ROAD = 0
+ BROKEN_SIGNAGE = 0
+ BAD_STREETLIGHT = 0
+ BAD_BILLBOARD = 0
+ SAND_ON_ROAD = 0
+ CLUTTER_SIDEWALK = 0
+ UNKEPT_FACADE = 0
+
+
+ for path, img, im0s, vid_cap in dataset:
+
+ img = torch.from_numpy(img).to(device)
+ img = img.half() if half else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ if img.ndimension() == 3:
+ img = img.unsqueeze(0)
+
+ # Warmup
+ if device.type != 'cpu' and (
+ old_img_b != img.shape[0] or old_img_h != img.shape[2] or old_img_w != img.shape[3]):
+ old_img_b = img.shape[0]
+ old_img_h = img.shape[2]
+ old_img_w = img.shape[3]
+
+ with torch.no_grad(): # Calculating gradients would cause a GPU memory leak
+ pred = model(img)[0]
+
+ # Apply NMS
+ pred = non_max_suppression(pred, conf_thres, iou_thres)
+
+ # Process detections
+ current_frame_potholes = 0
+ for i, det in enumerate(pred): # detections per image
+
+ if webcam: # batch_size >= 1
+ p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.count
+ else:
+ p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)
+
+ im0 = cv2.resize(im0, (640, 480))
+
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
+
+ for c in det[:, -1].unique():
+ n = (det[:, -1] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ label = f'{names[int(cls)]} {conf:.2f}'
+ TOTAL += 1
+ labelx = names[int(cls)]
+ current_frame_potholes += 1
+ plot_one_box(xyxy, im0, label=label, color=colors[0], line_thickness=1)
+ if labelx == 'GRAFFITI':
+ plot_one_box(xyxy, im0, label=label, color=colors[0], line_thickness=1)
+ GRAFFITI += 1
+ elif labelx == 'FADED SIGNAGE':
+ plot_one_box(xyxy, im0, label=label, color=colors[1], line_thickness=1)
+ FADED_SIGNAGE += 1
+ elif labelx == 'POTHOLES':
+ plot_one_box(xyxy, im0, label=label, color=colors[2], line_thickness=1)
+ POTHOLES += 1
+ elif labelx == 'GARBAGE':
+ plot_one_box(xyxy, im0, label=label, color=colors[3], line_thickness=1)
+ GARBAGE += 1
+ elif labelx == 'CONSTRUCTION ROAD':
+ plot_one_box(xyxy, im0, label=label, color=colors[4], line_thickness=1)
+ CONSTRUCTION_ROAD += 1
+ elif labelx == 'BROKEN SIGNAGE':
+ plot_one_box(xyxy, im0, label=label, color=colors[5], line_thickness=1)
+ BROKEN_SIGNAGE += 1
+ elif labelx == 'BAD STREETLIGHT':
+ plot_one_box(xyxy, im0, label=label, color=colors[6], line_thickness=1)
+ BAD_STREETLIGHT += 1
+ elif labelx == 'BAD BILLBOARD':
+ plot_one_box(xyxy, im0, label=label, color=colors[7], line_thickness=1)
+ BAD_BILLBOARD += 1
+ elif labelx == 'SAND ON ROAD':
+ plot_one_box(xyxy, im0, label=label, color=colors[8], line_thickness=1)
+ SAND_ON_ROAD += 1
+ elif labelx == 'CLUTTER SIDEWALK':
+ plot_one_box(xyxy, im0, label=label, color=colors[9], line_thickness=1)
+ CLUTTER_SIDEWALK += 1
+ elif labelx == 'UNKEPT FACADE':
+ plot_one_box(xyxy, im0, label=label, color=colors[10], line_thickness=1)
+ UNKEPT_FACADE += 1
+
+
+ (H, W) = im0.shape[:2]
+
+ print(" ")
+
+
+ cv2.putText(im0, "oneAPI ODAV", (250, 40),
+ font, 0.7 * 1, (255, 255, 255), 2)
+ cv2.rectangle(im0, (20, 50), (W - 20, 15), (255, 255, 255), 2)
+
+
+
+
+ sub_img = im0[H - 300: H, 0:200]
+ black_rect = np.ones(sub_img.shape, dtype=np.uint8) * 0
+
+ res = cv2.addWeighted(sub_img, 0.8, black_rect, 0.2, 1.0)
+
+ im0[H - 300:H + 40, 0:200] = res
+
+ cv2.putText(im0, str("GRAFFITI: " + str(GRAFFITI)), (30, H - 280),
+ font, 0.4 * 1, colors[0], 1)
+ cv2.rectangle(im0, (10, H - 280), (20, H-285), colors[0], 7)
+
+ cv2.putText(im0, str("FADED SIGNAGE: " + str(FADED_SIGNAGE)), (30, H - 255),
+ font, 0.4 * 1, colors[1], 1)
+ cv2.rectangle(im0, (10, H - 255), (20, H - 260), colors[1], 7)
+
+ cv2.putText(im0, str("POTHOLES: " + str(POTHOLES)), (30, H - 230),
+ font, 0.4 * 1, colors[2], 1)
+ cv2.rectangle(im0, (10, H - 230), (20, H - 235), colors[2], 7)
+
+ cv2.putText(im0, str("GARBAGE: " + str(GARBAGE)), (30, H - 205),
+ font, 0.4 * 1, colors[3], 1)
+ cv2.rectangle(im0, (10, H - 205), (20, H - 210), colors[3], 7)
+
+ cv2.putText(im0, str("CONSTRUCTION ROAD: " + str(CONSTRUCTION_ROAD)), (30, H - 180),
+ font, 0.4 * 1, colors[4], 1)
+ cv2.rectangle(im0, (10, H - 180), (20, H - 185), colors[4], 7)
+
+ cv2.putText(im0, str("BROKEN SIGNAGE: " + str(BROKEN_SIGNAGE)), (30, H - 155),
+ font, 0.4 * 1, colors[5], 1)
+ cv2.rectangle(im0, (10, H - 155), (20, H - 160), colors[5], 7)
+
+ cv2.putText(im0, str("BAD STREETLIGHT: " + str(BAD_STREETLIGHT)), (30, H - 130),
+ font, 0.4 * 1, colors[6], 1)
+ cv2.rectangle(im0, (10, H - 130), (20, H - 135), colors[6], 7)
+
+ cv2.putText(im0, str("BAD BILLBOARD: " + str(BAD_BILLBOARD)), (30, H - 105),
+ font, 0.4 * 1, colors[7], 1)
+ cv2.rectangle(im0, (10, H - 105), (20, H - 100), colors[7], 7)
+
+ cv2.putText(im0, str("SAND ON ROAD: " + str(SAND_ON_ROAD)), (30, H - 80),
+ font, 0.4 * 1, colors[8], 1)
+ cv2.rectangle(im0, (10, H - 80), (20, H - 85), colors[8], 7)
+
+ cv2.putText(im0, str("CLUTTER SIDEWALK: " + str(CLUTTER_SIDEWALK)), (30, H - 55),
+ font, 0.4 * 1, colors[9], 1)
+ cv2.rectangle(im0, (10, H - 55), (20, H - 60), colors[9], 7)
+
+ cv2.putText(im0, str("UNKEPT FACADE: " + str(UNKEPT_FACADE)), (30, H - 30),
+ font, 0.4 * 1, colors[10], 1)
+ cv2.rectangle(im0, (10, H - 30), (20, H - 35), colors[10], 7)
+
+ cv2.putText(im0, str("TOTAL: " + str(TOTAL)), (30, H - 5),
+ font, 0.4 * 1, (0, 0, 0), 1)
+
+ cv2.putText(im0, str("CURRENT FRAME: " + str(current_frame_potholes)), (W - 225, H - 35),
+ font, 0.7 * 1, (0, 0, 255), 2)
+
+ now = datetime.now()
+
+ timex = str(now.strftime("%d/%m/%Y %H:%M:%S"))
+ cv2.putText(im0, timex, (W - 200, H - 10),
+ font, 0.5 * 1, (255, 255, 255), 1)
+
+ cv2.namedWindow("Output", cv2.WINDOW_NORMAL)
+ cv2.setWindowProperty("Output", cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN)
+ cv2.imshow("Output", im0)
+
+ if (cv2.waitKey(1) & 0xFF == ord('q')):
+ break
+
+
+ cv2.destroyAllWindows()
+
+# if __name__ == '__main__':
+# with torch.no_grad():
+# AI_DASH_CAM("../TEST_VIDEO/Visual_Pollution.mp4")
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/ENGINES/AI_POTHOLES_DETECTION.py b/oneAPI_ODAV_APP/ENGINES/AI_POTHOLES_DETECTION.py
new file mode 100644
index 000000000..7dc05feb5
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/AI_POTHOLES_DETECTION.py
@@ -0,0 +1,196 @@
+import torch
+
+def AI_POTHOLES_DETECTION(source="0", model_weights="../Model/potholes_detector.pt"):
+
+ from pathlib import Path
+ import numpy as np
+
+
+ import cv2
+ from datetime import datetime
+ import torch
+ import torch.backends.cudnn as cudnn
+
+
+ from models.experimental import attempt_load
+ from utils.datasets import LoadStreams, LoadImages
+ from utils.general import check_img_size, check_requirements, check_imshow, non_max_suppression, apply_classifier, \
+ scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path
+ from utils.plots import plot_one_box
+ from utils.torch_utils import select_device, load_classifier, time_synchronized, TracedModel
+
+ device = 'cuda' if torch.cuda.is_available() else 'cpu'
+ weights = model_weights
+ img_size = 640
+ iou_thres = 0.45
+ conf_thres = 0.5
+
+ font = cv2.FONT_HERSHEY_SIMPLEX
+
+ webcam = source.isnumeric()
+
+ # Initialize
+ set_logging()
+ device = select_device(device)
+ half = device.type != 'cpu' # half precision only supported on CUDA
+
+ # Load model
+ model = attempt_load(weights, map_location=device) # load FP32 model
+ stride = int(model.stride.max()) # model stride
+ imgsz = check_img_size(img_size, s=stride) # check img_size
+
+ if half:
+ model.half() # to FP16
+
+ # Set Dataloader
+ if webcam:
+ view_img = check_imshow()
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride)
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride)
+
+ # Get names and colors
+ names = model.module.names if hasattr(model, 'module') else model.names
+ # colors = [[random.randint(0, 255) for _ in range(3)] for _ in names]
+ colors = [(0, 255, 0), (0, 255, 255), (0, 0, 255)]
+
+ # Run inference
+ if device.type != 'cpu':
+ model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
+ old_img_w = old_img_h = imgsz
+ old_img_b = 1
+
+ pot_holes = 0
+ high = 0
+ medium = 0
+ low = 0
+ for path, img, im0s, vid_cap in dataset:
+
+ img = torch.from_numpy(img).to(device)
+ img = img.half() if half else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ if img.ndimension() == 3:
+ img = img.unsqueeze(0)
+
+ # Warmup
+ if device.type != 'cpu' and (
+ old_img_b != img.shape[0] or old_img_h != img.shape[2] or old_img_w != img.shape[3]):
+ old_img_b = img.shape[0]
+ old_img_h = img.shape[2]
+ old_img_w = img.shape[3]
+
+ # Inference
+ t1 = time_synchronized()
+ with torch.no_grad(): # Calculating gradients would cause a GPU memory leak
+ pred = model(img)[0]
+ t2 = time_synchronized()
+
+ # Apply NMS
+ pred = non_max_suppression(pred, conf_thres, iou_thres)
+ t3 = time_synchronized()
+
+ # Process detections
+ current_frame_potholes = 0
+ for i, det in enumerate(pred): # detections per image
+
+ if webcam: # batch_size >= 1
+ p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.count
+ else:
+ p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)
+
+ im0 = cv2.resize(im0, (640, 480))
+
+ gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
+
+ # Print results
+ for c in det[:, -1].unique():
+ n = (det[:, -1] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ label = f'{names[int(cls)]} {conf:.2f}'
+ print(xyxy)
+ pot_holes += 1
+ current_frame_potholes += 1
+ mul = (int(xyxy[2])*int(xyxy[3]))
+ print("sumx", mul)
+ if mul <= 40000:
+ plot_one_box(xyxy, im0, label=label, color=colors[0], line_thickness=1)
+ low += 1
+ elif mul > 40000 and mul < 70000:
+ plot_one_box(xyxy, im0, label=label, color=colors[1], line_thickness=1)
+ medium += 1
+ else:
+ plot_one_box(xyxy, im0, label=label, color=colors[2], line_thickness=1)
+ high += 1
+
+
+
+
+
+ (H, W) = im0.shape[:2]
+
+ print(H, W)
+
+ cv2.putText(im0, "Neom (PotHoles Detection System)", (110, 40),
+ font, 0.7 * 1, (255, 255, 255), 2)
+ cv2.rectangle(im0, (20, 50), (W - 20, 15), (255, 255, 255), 2)
+
+ cv2.putText(im0, "RISK ANALYSIS", (30, 85),
+ font, 0.4 * 1, (255, 255, 255), 1)
+ cv2.putText(im0, "-- GREEN : SAFE", (H-20, 85),
+ font, 0.4 * 1, (0, 255, 0), 1)
+ cv2.putText(im0, "-- YELLOW : Drive Slowly ", (H - 200, 85),
+ font, 0.4 * 1, (0, 255, 255), 1)
+ cv2.putText(im0, "-- RED: UNSAFE", (H-320, 85),
+ font, 0.4 * 1, (0, 0, 255), 1)
+
+ tot_str = "Total Potholes Detected: " + str(pot_holes)
+ high_str = "Risky Potholes Detected: " + str(high)
+ med_str = "Unsafe Pothole Detected: " + str(medium)
+ safe_str = "Safe Pothole Detected: " + str(low)
+
+
+ sub_img = im0[H - 100: H, 0:260]
+ black_rect = np.ones(sub_img.shape, dtype=np.uint8) * 0
+
+ res = cv2.addWeighted(sub_img, 0.8, black_rect, 0.2, 1.0)
+
+ im0[H - 100:H + 40, 0:260] = res
+
+
+ cv2.putText(im0, tot_str, (10, H - 80),
+ font, 0.5 * 1, (255, 255, 255), 1)
+ cv2.putText(im0, high_str, (10, H - 55),
+ font, 0.5 * 1, (0, 255, 0), 1)
+ cv2.putText(im0, med_str, (10, H - 30),
+ font, 0.5 * 1, (0, 120, 255), 1)
+ cv2.putText(im0, safe_str, (10, H - 5),
+ font, 0.5 * 1, (0, 0, 150), 1)
+
+ cv2.putText(im0, str("CURRENT FRAME: " + str(current_frame_potholes)), (W - 225, H - 35),
+ font, 0.7 * 1, (0, 0, 255), 2)
+
+ now = datetime.now()
+
+ timex = str(now.strftime("%d/%m/%Y %H:%M:%S"))
+ cv2.putText(im0, timex, (W - 200, H - 10),
+ font, 0.5 * 1, (255, 255, 255), 1)
+
+ cv2.namedWindow("Output", cv2.WINDOW_NORMAL)
+ cv2.setWindowProperty("Output", cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN)
+ cv2.imshow("Output", im0)
+
+ if (cv2.waitKey(1) & 0xFF == ord('q')):
+ break
+
+ cv2.destroyAllWindows()
+
+# if __name__ == '__main__':
+# with torch.no_grad():
+# AI_POTHOLES_DETECTION("../TEST_VIDEO/potholes.mp4")
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/ENGINES/models/__init__.py b/oneAPI_ODAV_APP/ENGINES/models/__init__.py
new file mode 100644
index 000000000..a6131c10e
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/models/__init__.py
@@ -0,0 +1 @@
+# init
diff --git a/oneAPI_ODAV_APP/ENGINES/models/common.py b/oneAPI_ODAV_APP/ENGINES/models/common.py
new file mode 100644
index 000000000..015cc788a
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/models/common.py
@@ -0,0 +1,2020 @@
+import math
+from copy import copy
+from pathlib import Path
+
+
+import numpy as np
+import pandas as pd
+import requests
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+from torchvision.ops import DeformConv2d
+from PIL import Image
+from torch.cuda import amp
+
+from utils.datasets import letterbox
+from utils.general import non_max_suppression, make_divisible, scale_coords, increment_path, xyxy2xywh
+from utils.plots import color_list, plot_one_box
+from utils.torch_utils import time_synchronized
+
+
+##### basic ####
+
+def autopad(k, p=None): # kernel, padding
+ # Pad to 'same'
+ if p is None:
+ p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
+ return p
+
+
+class MP(nn.Module):
+ def __init__(self, k=2):
+ super(MP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class SP(nn.Module):
+ def __init__(self, k=3, s=1):
+ super(SP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=s, padding=k // 2)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class ReOrg(nn.Module):
+ def __init__(self):
+ super(ReOrg, self).__init__()
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1)
+
+
+class Concat(nn.Module):
+ def __init__(self, dimension=1):
+ super(Concat, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return torch.cat(x, self.d)
+
+
+class Chuncat(nn.Module):
+ def __init__(self, dimension=1):
+ super(Chuncat, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ x1 = []
+ x2 = []
+ for xi in x:
+ xi1, xi2 = xi.chunk(2, self.d)
+ x1.append(xi1)
+ x2.append(xi2)
+ return torch.cat(x1+x2, self.d)
+
+
+class Shortcut(nn.Module):
+ def __init__(self, dimension=0):
+ super(Shortcut, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return x[0]+x[1]
+
+
+class Foldcut(nn.Module):
+ def __init__(self, dimension=0):
+ super(Foldcut, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ x1, x2 = x.chunk(2, self.d)
+ return x1+x2
+
+
+class Conv(nn.Module):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Conv, self).__init__()
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ def forward(self, x):
+ return self.act(self.bn(self.conv(x)))
+
+ def fuseforward(self, x):
+ return self.act(self.conv(x))
+
+
+class RobustConv(nn.Module):
+ # Robust convolution (use high kernel size 7-11 for: downsampling and other layers). Train for 300 - 450 epochs.
+ def __init__(self, c1, c2, k=7, s=1, p=None, g=1, act=True, layer_scale_init_value=1e-6): # ch_in, ch_out, kernel, stride, padding, groups
+ super(RobustConv, self).__init__()
+ self.conv_dw = Conv(c1, c1, k=k, s=s, p=p, g=c1, act=act)
+ self.conv1x1 = nn.Conv2d(c1, c2, 1, 1, 0, groups=1, bias=True)
+ self.gamma = nn.Parameter(layer_scale_init_value * torch.ones(c2)) if layer_scale_init_value > 0 else None
+
+ def forward(self, x):
+ x = x.to(memory_format=torch.channels_last)
+ x = self.conv1x1(self.conv_dw(x))
+ if self.gamma is not None:
+ x = x.mul(self.gamma.reshape(1, -1, 1, 1))
+ return x
+
+
+class RobustConv2(nn.Module):
+ # Robust convolution 2 (use [32, 5, 2] or [32, 7, 4] or [32, 11, 8] for one of the paths in CSP).
+ def __init__(self, c1, c2, k=7, s=4, p=None, g=1, act=True, layer_scale_init_value=1e-6): # ch_in, ch_out, kernel, stride, padding, groups
+ super(RobustConv2, self).__init__()
+ self.conv_strided = Conv(c1, c1, k=k, s=s, p=p, g=c1, act=act)
+ self.conv_deconv = nn.ConvTranspose2d(in_channels=c1, out_channels=c2, kernel_size=s, stride=s,
+ padding=0, bias=True, dilation=1, groups=1
+ )
+ self.gamma = nn.Parameter(layer_scale_init_value * torch.ones(c2)) if layer_scale_init_value > 0 else None
+
+ def forward(self, x):
+ x = self.conv_deconv(self.conv_strided(x))
+ if self.gamma is not None:
+ x = x.mul(self.gamma.reshape(1, -1, 1, 1))
+ return x
+
+
+def DWConv(c1, c2, k=1, s=1, act=True):
+ # Depthwise convolution
+ return Conv(c1, c2, k, s, g=math.gcd(c1, c2), act=act)
+
+
+class GhostConv(nn.Module):
+ # Ghost Convolution https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
+ super(GhostConv, self).__init__()
+ c_ = c2 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, k, s, None, g, act)
+ self.cv2 = Conv(c_, c_, 5, 1, None, c_, act)
+
+ def forward(self, x):
+ y = self.cv1(x)
+ return torch.cat([y, self.cv2(y)], 1)
+
+
+class Stem(nn.Module):
+ # Stem
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Stem, self).__init__()
+ c_ = int(c2/2) # hidden channels
+ self.cv1 = Conv(c1, c_, 3, 2)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 2)
+ self.pool = torch.nn.MaxPool2d(2, stride=2)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ return self.cv4(torch.cat((self.cv3(self.cv2(x)), self.pool(x)), dim=1))
+
+
+class DownC(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, n=1, k=2):
+ super(DownC, self).__init__()
+ c_ = int(c1) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2//2, 3, k)
+ self.cv3 = Conv(c1, c2//2, 1, 1)
+ self.mp = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return torch.cat((self.cv2(self.cv1(x)), self.cv3(self.mp(x))), dim=1)
+
+
+class SPP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, k=(5, 9, 13)):
+ super(SPP, self).__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+
+ def forward(self, x):
+ x = self.cv1(x)
+ return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))
+
+
+class Bottleneck(nn.Module):
+ # Darknet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super(Bottleneck, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2, 3, 1, g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class Res(nn.Module):
+ # ResNet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super(Res, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 3, 1, g=g)
+ self.cv3 = Conv(c_, c2, 1, 1)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv3(self.cv2(self.cv1(x))) if self.add else self.cv3(self.cv2(self.cv1(x)))
+
+
+class ResX(Res):
+ # ResNet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=32, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+
+
+class Ghost(nn.Module):
+ # Ghost Bottleneck https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride
+ super(Ghost, self).__init__()
+ c_ = c2 // 2
+ self.conv = nn.Sequential(GhostConv(c1, c_, 1, 1), # pw
+ DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw
+ GhostConv(c_, c2, 1, 1, act=False)) # pw-linear
+ self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False),
+ Conv(c1, c2, 1, 1, act=False)) if s == 2 else nn.Identity()
+
+ def forward(self, x):
+ return self.conv(x) + self.shortcut(x)
+
+##### end of basic #####
+
+
+##### cspnet #####
+
+class SPPCSPC(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super(SPPCSPC, self).__init__()
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 1)
+ self.cv4 = Conv(c_, c_, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+ self.cv5 = Conv(4 * c_, c_, 1, 1)
+ self.cv6 = Conv(c_, c_, 3, 1)
+ self.cv7 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x1 = self.cv4(self.cv3(self.cv1(x)))
+ y1 = self.cv6(self.cv5(torch.cat([x1] + [m(x1) for m in self.m], 1)))
+ y2 = self.cv2(x)
+ return self.cv7(torch.cat((y1, y2), dim=1))
+
+class GhostSPPCSPC(SPPCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super().__init__(c1, c2, n, shortcut, g, e, k)
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = GhostConv(c1, c_, 1, 1)
+ self.cv2 = GhostConv(c1, c_, 1, 1)
+ self.cv3 = GhostConv(c_, c_, 3, 1)
+ self.cv4 = GhostConv(c_, c_, 1, 1)
+ self.cv5 = GhostConv(4 * c_, c_, 1, 1)
+ self.cv6 = GhostConv(c_, c_, 3, 1)
+ self.cv7 = GhostConv(2 * c_, c2, 1, 1)
+
+
+class GhostStem(Stem):
+ # Stem
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__(c1, c2, k, s, p, g, act)
+ c_ = int(c2/2) # hidden channels
+ self.cv1 = GhostConv(c1, c_, 3, 2)
+ self.cv2 = GhostConv(c_, c_, 1, 1)
+ self.cv3 = GhostConv(c_, c_, 3, 2)
+ self.cv4 = GhostConv(2 * c_, c2, 1, 1)
+
+
+class BottleneckCSPA(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class BottleneckCSPB(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class BottleneckCSPC(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+
+class ResCSPA(BottleneckCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResCSPB(BottleneckCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResCSPC(BottleneckCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResXCSPA(ResCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class ResXCSPB(ResCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class ResXCSPC(ResCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class GhostCSPA(BottleneckCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+
+class GhostCSPB(BottleneckCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+
+class GhostCSPC(BottleneckCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+##### end of cspnet #####
+
+
+##### yolor #####
+
+class ImplicitA(nn.Module):
+ def __init__(self, channel, mean=0., std=.02):
+ super(ImplicitA, self).__init__()
+ self.channel = channel
+ self.mean = mean
+ self.std = std
+ self.implicit = nn.Parameter(torch.zeros(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=self.mean, std=self.std)
+
+ def forward(self, x):
+ return self.implicit + x
+
+
+class ImplicitM(nn.Module):
+ def __init__(self, channel, mean=1., std=.02):
+ super(ImplicitM, self).__init__()
+ self.channel = channel
+ self.mean = mean
+ self.std = std
+ self.implicit = nn.Parameter(torch.ones(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=self.mean, std=self.std)
+
+ def forward(self, x):
+ return self.implicit * x
+
+##### end of yolor #####
+
+
+##### repvgg #####
+
+class RepConv(nn.Module):
+ # Represented convolution
+ # https://arxiv.org/abs/2101.03697
+
+ def __init__(self, c1, c2, k=3, s=1, p=None, g=1, act=True, deploy=False):
+ super(RepConv, self).__init__()
+
+ self.deploy = deploy
+ self.groups = g
+ self.in_channels = c1
+ self.out_channels = c2
+
+ assert k == 3
+ assert autopad(k, p) == 1
+
+ padding_11 = autopad(k, p) - k // 2
+
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ if deploy:
+ self.rbr_reparam = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=True)
+
+ else:
+ self.rbr_identity = (nn.BatchNorm2d(num_features=c1) if c2 == c1 and s == 1 else None)
+
+ self.rbr_dense = nn.Sequential(
+ nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False),
+ nn.BatchNorm2d(num_features=c2),
+ )
+
+ self.rbr_1x1 = nn.Sequential(
+ nn.Conv2d( c1, c2, 1, s, padding_11, groups=g, bias=False),
+ nn.BatchNorm2d(num_features=c2),
+ )
+
+ def forward(self, inputs):
+ if hasattr(self, "rbr_reparam"):
+ return self.act(self.rbr_reparam(inputs))
+
+ if self.rbr_identity is None:
+ id_out = 0
+ else:
+ id_out = self.rbr_identity(inputs)
+
+ return self.act(self.rbr_dense(inputs) + self.rbr_1x1(inputs) + id_out)
+
+ def get_equivalent_kernel_bias(self):
+ kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense)
+ kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1)
+ kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity)
+ return (
+ kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1) + kernelid,
+ bias3x3 + bias1x1 + biasid,
+ )
+
+ def _pad_1x1_to_3x3_tensor(self, kernel1x1):
+ if kernel1x1 is None:
+ return 0
+ else:
+ return nn.functional.pad(kernel1x1, [1, 1, 1, 1])
+
+ def _fuse_bn_tensor(self, branch):
+ if branch is None:
+ return 0, 0
+ if isinstance(branch, nn.Sequential):
+ kernel = branch[0].weight
+ running_mean = branch[1].running_mean
+ running_var = branch[1].running_var
+ gamma = branch[1].weight
+ beta = branch[1].bias
+ eps = branch[1].eps
+ else:
+ assert isinstance(branch, nn.BatchNorm2d)
+ if not hasattr(self, "id_tensor"):
+ input_dim = self.in_channels // self.groups
+ kernel_value = np.zeros(
+ (self.in_channels, input_dim, 3, 3), dtype=np.float32
+ )
+ for i in range(self.in_channels):
+ kernel_value[i, i % input_dim, 1, 1] = 1
+ self.id_tensor = torch.from_numpy(kernel_value).to(branch.weight.device)
+ kernel = self.id_tensor
+ running_mean = branch.running_mean
+ running_var = branch.running_var
+ gamma = branch.weight
+ beta = branch.bias
+ eps = branch.eps
+ std = (running_var + eps).sqrt()
+ t = (gamma / std).reshape(-1, 1, 1, 1)
+ return kernel * t, beta - running_mean * gamma / std
+
+ def repvgg_convert(self):
+ kernel, bias = self.get_equivalent_kernel_bias()
+ return (
+ kernel.detach().cpu().numpy(),
+ bias.detach().cpu().numpy(),
+ )
+
+ def fuse_conv_bn(self, conv, bn):
+
+ std = (bn.running_var + bn.eps).sqrt()
+ bias = bn.bias - bn.running_mean * bn.weight / std
+
+ t = (bn.weight / std).reshape(-1, 1, 1, 1)
+ weights = conv.weight * t
+
+ bn = nn.Identity()
+ conv = nn.Conv2d(in_channels = conv.in_channels,
+ out_channels = conv.out_channels,
+ kernel_size = conv.kernel_size,
+ stride=conv.stride,
+ padding = conv.padding,
+ dilation = conv.dilation,
+ groups = conv.groups,
+ bias = True,
+ padding_mode = conv.padding_mode)
+
+ conv.weight = torch.nn.Parameter(weights)
+ conv.bias = torch.nn.Parameter(bias)
+ return conv
+
+ def fuse_repvgg_block(self):
+ if self.deploy:
+ return
+ print(f"RepConv.fuse_repvgg_block")
+
+ self.rbr_dense = self.fuse_conv_bn(self.rbr_dense[0], self.rbr_dense[1])
+
+ self.rbr_1x1 = self.fuse_conv_bn(self.rbr_1x1[0], self.rbr_1x1[1])
+ rbr_1x1_bias = self.rbr_1x1.bias
+ weight_1x1_expanded = torch.nn.functional.pad(self.rbr_1x1.weight, [1, 1, 1, 1])
+
+ # Fuse self.rbr_identity
+ if (isinstance(self.rbr_identity, nn.BatchNorm2d) or isinstance(self.rbr_identity, nn.modules.batchnorm.SyncBatchNorm)):
+ # print(f"fuse: rbr_identity == BatchNorm2d or SyncBatchNorm")
+ identity_conv_1x1 = nn.Conv2d(
+ in_channels=self.in_channels,
+ out_channels=self.out_channels,
+ kernel_size=1,
+ stride=1,
+ padding=0,
+ groups=self.groups,
+ bias=False)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.to(self.rbr_1x1.weight.data.device)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.squeeze().squeeze()
+ # print(f" identity_conv_1x1.weight = {identity_conv_1x1.weight.shape}")
+ identity_conv_1x1.weight.data.fill_(0.0)
+ identity_conv_1x1.weight.data.fill_diagonal_(1.0)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.unsqueeze(2).unsqueeze(3)
+ # print(f" identity_conv_1x1.weight = {identity_conv_1x1.weight.shape}")
+
+ identity_conv_1x1 = self.fuse_conv_bn(identity_conv_1x1, self.rbr_identity)
+ bias_identity_expanded = identity_conv_1x1.bias
+ weight_identity_expanded = torch.nn.functional.pad(identity_conv_1x1.weight, [1, 1, 1, 1])
+ else:
+ # print(f"fuse: rbr_identity != BatchNorm2d, rbr_identity = {self.rbr_identity}")
+ bias_identity_expanded = torch.nn.Parameter( torch.zeros_like(rbr_1x1_bias) )
+ weight_identity_expanded = torch.nn.Parameter( torch.zeros_like(weight_1x1_expanded) )
+
+
+ #print(f"self.rbr_1x1.weight = {self.rbr_1x1.weight.shape}, ")
+ #print(f"weight_1x1_expanded = {weight_1x1_expanded.shape}, ")
+ #print(f"self.rbr_dense.weight = {self.rbr_dense.weight.shape}, ")
+
+ self.rbr_dense.weight = torch.nn.Parameter(self.rbr_dense.weight + weight_1x1_expanded + weight_identity_expanded)
+ self.rbr_dense.bias = torch.nn.Parameter(self.rbr_dense.bias + rbr_1x1_bias + bias_identity_expanded)
+
+ self.rbr_reparam = self.rbr_dense
+ self.deploy = True
+
+ if self.rbr_identity is not None:
+ del self.rbr_identity
+ self.rbr_identity = None
+
+ if self.rbr_1x1 is not None:
+ del self.rbr_1x1
+ self.rbr_1x1 = None
+
+ if self.rbr_dense is not None:
+ del self.rbr_dense
+ self.rbr_dense = None
+
+
+class RepBottleneck(Bottleneck):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut=True, g=1, e=0.5)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c2, 3, 1, g=g)
+
+
+class RepBottleneckCSPA(BottleneckCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepBottleneckCSPB(BottleneckCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepBottleneckCSPC(BottleneckCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepRes(Res):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c_, 3, 1, g=g)
+
+
+class RepResCSPA(ResCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResCSPB(ResCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResCSPC(ResCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResX(ResX):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=32, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c_, 3, 1, g=g)
+
+
+class RepResXCSPA(ResXCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResXCSPB(ResXCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResXCSPC(ResXCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+##### end of repvgg #####
+
+
+##### transformer #####
+
+class TransformerLayer(nn.Module):
+ # Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance)
+ def __init__(self, c, num_heads):
+ super().__init__()
+ self.q = nn.Linear(c, c, bias=False)
+ self.k = nn.Linear(c, c, bias=False)
+ self.v = nn.Linear(c, c, bias=False)
+ self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads)
+ self.fc1 = nn.Linear(c, c, bias=False)
+ self.fc2 = nn.Linear(c, c, bias=False)
+
+ def forward(self, x):
+ x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x
+ x = self.fc2(self.fc1(x)) + x
+ return x
+
+
+class TransformerBlock(nn.Module):
+ # Vision Transformer https://arxiv.org/abs/2010.11929
+ def __init__(self, c1, c2, num_heads, num_layers):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+ self.linear = nn.Linear(c2, c2) # learnable position embedding
+ self.tr = nn.Sequential(*[TransformerLayer(c2, num_heads) for _ in range(num_layers)])
+ self.c2 = c2
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ b, _, w, h = x.shape
+ p = x.flatten(2)
+ p = p.unsqueeze(0)
+ p = p.transpose(0, 3)
+ p = p.squeeze(3)
+ e = self.linear(p)
+ x = p + e
+
+ x = self.tr(x)
+ x = x.unsqueeze(3)
+ x = x.transpose(0, 3)
+ x = x.reshape(b, self.c2, w, h)
+ return x
+
+##### end of transformer #####
+
+
+##### yolov5 #####
+
+class Focus(nn.Module):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Focus, self).__init__()
+ self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
+ # self.contract = Contract(gain=2)
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
+ # return self.conv(self.contract(x))
+
+
+class SPPF(nn.Module):
+ # Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
+ def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * 4, c2, 1, 1)
+ self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(torch.cat([x, y1, y2, self.m(y2)], 1))
+
+
+class Contract(nn.Module):
+ # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ N, C, H, W = x.size() # assert (H / s == 0) and (W / s == 0), 'Indivisible gain'
+ s = self.gain
+ x = x.view(N, C, H // s, s, W // s, s) # x(1,64,40,2,40,2)
+ x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
+ return x.view(N, C * s * s, H // s, W // s) # x(1,256,40,40)
+
+
+class Expand(nn.Module):
+ # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ N, C, H, W = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
+ s = self.gain
+ x = x.view(N, s, s, C // s ** 2, H, W) # x(1,2,2,16,80,80)
+ x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
+ return x.view(N, C // s ** 2, H * s, W * s) # x(1,16,160,160)
+
+
+class NMS(nn.Module):
+ # Non-Maximum Suppression (NMS) module
+ conf = 0.25 # confidence threshold
+ iou = 0.45 # IoU threshold
+ classes = None # (optional list) filter by class
+
+ def __init__(self):
+ super(NMS, self).__init__()
+
+ def forward(self, x):
+ return non_max_suppression(x[0], conf_thres=self.conf, iou_thres=self.iou, classes=self.classes)
+
+
+class autoShape(nn.Module):
+ # input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS
+ conf = 0.25 # NMS confidence threshold
+ iou = 0.45 # NMS IoU threshold
+ classes = None # (optional list) filter by class
+
+ def __init__(self, model):
+ super(autoShape, self).__init__()
+ self.model = model.eval()
+
+ def autoshape(self):
+ print('autoShape already enabled, skipping... ') # model already converted to model.autoshape()
+ return self
+
+ @torch.no_grad()
+ def forward(self, imgs, size=640, augment=False, profile=False):
+ # Inference from various sources. For height=640, width=1280, RGB images example inputs are:
+ # filename: imgs = 'data/samples/zidane.jpg'
+ # URI: = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/zidane.jpg'
+ # OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3)
+ # PIL: = Image.open('image.jpg') # HWC x(640,1280,3)
+ # numpy: = np.zeros((640,1280,3)) # HWC
+ # torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values)
+ # multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images
+
+ t = [time_synchronized()]
+ p = next(self.model.parameters()) # for device and type
+ if isinstance(imgs, torch.Tensor): # torch
+ with amp.autocast(enabled=p.device.type != 'cpu'):
+ return self.model(imgs.to(p.device).type_as(p), augment, profile) # inference
+
+ # Pre-process
+ n, imgs = (len(imgs), imgs) if isinstance(imgs, list) else (1, [imgs]) # number of images, list of images
+ shape0, shape1, files = [], [], [] # image and inference shapes, filenames
+ for i, im in enumerate(imgs):
+ f = f'image{i}' # filename
+ if isinstance(im, str): # filename or uri
+ im, f = np.asarray(Image.open(requests.get(im, stream=True).raw if im.startswith('http') else im)), im
+ elif isinstance(im, Image.Image): # PIL Image
+ im, f = np.asarray(im), getattr(im, 'filename', f) or f
+ files.append(Path(f).with_suffix('.jpg').name)
+ if im.shape[0] < 5: # image in CHW
+ im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1)
+ im = im[:, :, :3] if im.ndim == 3 else np.tile(im[:, :, None], 3) # enforce 3ch input
+ s = im.shape[:2] # HWC
+ shape0.append(s) # image shape
+ g = (size / max(s)) # gain
+ shape1.append([y * g for y in s])
+ imgs[i] = im # update
+ shape1 = [make_divisible(x, int(self.stride.max())) for x in np.stack(shape1, 0).max(0)] # inference shape
+ x = [letterbox(im, new_shape=shape1, auto=False)[0] for im in imgs] # pad
+ x = np.stack(x, 0) if n > 1 else x[0][None] # stack
+ x = np.ascontiguousarray(x.transpose((0, 3, 1, 2))) # BHWC to BCHW
+ x = torch.from_numpy(x).to(p.device).type_as(p) / 255. # uint8 to fp16/32
+ t.append(time_synchronized())
+
+ with amp.autocast(enabled=p.device.type != 'cpu'):
+ # Inference
+ y = self.model(x, augment, profile)[0] # forward
+ t.append(time_synchronized())
+
+ # Post-process
+ y = non_max_suppression(y, conf_thres=self.conf, iou_thres=self.iou, classes=self.classes) # NMS
+ for i in range(n):
+ scale_coords(shape1, y[i][:, :4], shape0[i])
+
+ t.append(time_synchronized())
+ return Detections(imgs, y, files, t, self.names, x.shape)
+
+
+class Detections:
+ # detections class for YOLOv5 inference results
+ def __init__(self, imgs, pred, files, times=None, names=None, shape=None):
+ super(Detections, self).__init__()
+ d = pred[0].device # device
+ gn = [torch.tensor([*[im.shape[i] for i in [1, 0, 1, 0]], 1., 1.], device=d) for im in imgs] # normalizations
+ self.imgs = imgs # list of images as numpy arrays
+ self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls)
+ self.names = names # class names
+ self.files = files # image filenames
+ self.xyxy = pred # xyxy pixels
+ self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels
+ self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized
+ self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized
+ self.n = len(self.pred) # number of images (batch size)
+ self.t = tuple((times[i + 1] - times[i]) * 1000 / self.n for i in range(3)) # timestamps (ms)
+ self.s = shape # inference BCHW shape
+
+ def display(self, pprint=False, show=False, save=False, render=False, save_dir=''):
+ colors = color_list()
+ for i, (img, pred) in enumerate(zip(self.imgs, self.pred)):
+ str = f'image {i + 1}/{len(self.pred)}: {img.shape[0]}x{img.shape[1]} '
+ if pred is not None:
+ for c in pred[:, -1].unique():
+ n = (pred[:, -1] == c).sum() # detections per class
+ str += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string
+ if show or save or render:
+ for *box, conf, cls in pred: # xyxy, confidence, class
+ label = f'{self.names[int(cls)]} {conf:.2f}'
+ plot_one_box(box, img, label=label, color=colors[int(cls) % 10])
+ img = Image.fromarray(img.astype(np.uint8)) if isinstance(img, np.ndarray) else img # from np
+ if pprint:
+ print(str.rstrip(', '))
+ if show:
+ img.show(self.files[i]) # show
+ if save:
+ f = self.files[i]
+ img.save(Path(save_dir) / f) # save
+ print(f"{'Saved' * (i == 0)} {f}", end=',' if i < self.n - 1 else f' to {save_dir}\n')
+ if render:
+ self.imgs[i] = np.asarray(img)
+
+ def print(self):
+ self.display(pprint=True) # print results
+ print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {tuple(self.s)}' % self.t)
+
+ def show(self):
+ self.display(show=True) # show results
+
+ def save(self, save_dir='runs/hub/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/hub/exp') # increment save_dir
+ Path(save_dir).mkdir(parents=True, exist_ok=True)
+ self.display(save=True, save_dir=save_dir) # save results
+
+ def render(self):
+ self.display(render=True) # render results
+ return self.imgs
+
+ def pandas(self):
+ # return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0])
+ new = copy(self) # return copy
+ ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns
+ cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns
+ for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]):
+ a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update
+ setattr(new, k, [pd.DataFrame(x, columns=c) for x in a])
+ return new
+
+ def tolist(self):
+ # return a list of Detections objects, i.e. 'for result in results.tolist():'
+ x = [Detections([self.imgs[i]], [self.pred[i]], self.names, self.s) for i in range(self.n)]
+ for d in x:
+ for k in ['imgs', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']:
+ setattr(d, k, getattr(d, k)[0]) # pop out of list
+ return x
+
+ def __len__(self):
+ return self.n
+
+
+class Classify(nn.Module):
+ # Classification head, i.e. x(b,c1,20,20) to x(b,c2)
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Classify, self).__init__()
+ self.aap = nn.AdaptiveAvgPool2d(1) # to x(b,c1,1,1)
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g) # to x(b,c2,1,1)
+ self.flat = nn.Flatten()
+
+ def forward(self, x):
+ z = torch.cat([self.aap(y) for y in (x if isinstance(x, list) else [x])], 1) # cat if list
+ return self.flat(self.conv(z)) # flatten to x(b,c2)
+
+##### end of yolov5 ######
+
+
+##### orepa #####
+
+def transI_fusebn(kernel, bn):
+ gamma = bn.weight
+ std = (bn.running_var + bn.eps).sqrt()
+ return kernel * ((gamma / std).reshape(-1, 1, 1, 1)), bn.bias - bn.running_mean * gamma / std
+
+
+class ConvBN(nn.Module):
+ def __init__(self, in_channels, out_channels, kernel_size,
+ stride=1, padding=0, dilation=1, groups=1, deploy=False, nonlinear=None):
+ super().__init__()
+ if nonlinear is None:
+ self.nonlinear = nn.Identity()
+ else:
+ self.nonlinear = nonlinear
+ if deploy:
+ self.conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
+ stride=stride, padding=padding, dilation=dilation, groups=groups, bias=True)
+ else:
+ self.conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
+ stride=stride, padding=padding, dilation=dilation, groups=groups, bias=False)
+ self.bn = nn.BatchNorm2d(num_features=out_channels)
+
+ def forward(self, x):
+ if hasattr(self, 'bn'):
+ return self.nonlinear(self.bn(self.conv(x)))
+ else:
+ return self.nonlinear(self.conv(x))
+
+ def switch_to_deploy(self):
+ kernel, bias = transI_fusebn(self.conv.weight, self.bn)
+ conv = nn.Conv2d(in_channels=self.conv.in_channels, out_channels=self.conv.out_channels, kernel_size=self.conv.kernel_size,
+ stride=self.conv.stride, padding=self.conv.padding, dilation=self.conv.dilation, groups=self.conv.groups, bias=True)
+ conv.weight.data = kernel
+ conv.bias.data = bias
+ for para in self.parameters():
+ para.detach_()
+ self.__delattr__('conv')
+ self.__delattr__('bn')
+ self.conv = conv
+
+class OREPA_3x3_RepConv(nn.Module):
+
+ def __init__(self, in_channels, out_channels, kernel_size,
+ stride=1, padding=0, dilation=1, groups=1,
+ internal_channels_1x1_3x3=None,
+ deploy=False, nonlinear=None, single_init=False):
+ super(OREPA_3x3_RepConv, self).__init__()
+ self.deploy = deploy
+
+ if nonlinear is None:
+ self.nonlinear = nn.Identity()
+ else:
+ self.nonlinear = nonlinear
+
+ self.kernel_size = kernel_size
+ self.in_channels = in_channels
+ self.out_channels = out_channels
+ self.groups = groups
+ assert padding == kernel_size // 2
+
+ self.stride = stride
+ self.padding = padding
+ self.dilation = dilation
+
+ self.branch_counter = 0
+
+ self.weight_rbr_origin = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), kernel_size, kernel_size))
+ nn.init.kaiming_uniform_(self.weight_rbr_origin, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+
+ if groups < out_channels:
+ self.weight_rbr_avg_conv = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), 1, 1))
+ self.weight_rbr_pfir_conv = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_avg_conv, a=1.0)
+ nn.init.kaiming_uniform_(self.weight_rbr_pfir_conv, a=1.0)
+ self.weight_rbr_avg_conv.data
+ self.weight_rbr_pfir_conv.data
+ self.register_buffer('weight_rbr_avg_avg', torch.ones(kernel_size, kernel_size).mul(1.0/kernel_size/kernel_size))
+ self.branch_counter += 1
+
+ else:
+ raise NotImplementedError
+ self.branch_counter += 1
+
+ if internal_channels_1x1_3x3 is None:
+ internal_channels_1x1_3x3 = in_channels if groups < out_channels else 2 * in_channels # For mobilenet, it is better to have 2X internal channels
+
+ if internal_channels_1x1_3x3 == in_channels:
+ self.weight_rbr_1x1_kxk_idconv1 = nn.Parameter(torch.zeros(in_channels, int(in_channels/self.groups), 1, 1))
+ id_value = np.zeros((in_channels, int(in_channels/self.groups), 1, 1))
+ for i in range(in_channels):
+ id_value[i, i % int(in_channels/self.groups), 0, 0] = 1
+ id_tensor = torch.from_numpy(id_value).type_as(self.weight_rbr_1x1_kxk_idconv1)
+ self.register_buffer('id_tensor', id_tensor)
+
+ else:
+ self.weight_rbr_1x1_kxk_conv1 = nn.Parameter(torch.Tensor(internal_channels_1x1_3x3, int(in_channels/self.groups), 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_1x1_kxk_conv1, a=math.sqrt(1.0))
+ self.weight_rbr_1x1_kxk_conv2 = nn.Parameter(torch.Tensor(out_channels, int(internal_channels_1x1_3x3/self.groups), kernel_size, kernel_size))
+ nn.init.kaiming_uniform_(self.weight_rbr_1x1_kxk_conv2, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+ expand_ratio = 8
+ self.weight_rbr_gconv_dw = nn.Parameter(torch.Tensor(in_channels*expand_ratio, 1, kernel_size, kernel_size))
+ self.weight_rbr_gconv_pw = nn.Parameter(torch.Tensor(out_channels, in_channels*expand_ratio, 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_gconv_dw, a=math.sqrt(1.0))
+ nn.init.kaiming_uniform_(self.weight_rbr_gconv_pw, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+ if out_channels == in_channels and stride == 1:
+ self.branch_counter += 1
+
+ self.vector = nn.Parameter(torch.Tensor(self.branch_counter, self.out_channels))
+ self.bn = nn.BatchNorm2d(out_channels)
+
+ self.fre_init()
+
+ nn.init.constant_(self.vector[0, :], 0.25) #origin
+ nn.init.constant_(self.vector[1, :], 0.25) #avg
+ nn.init.constant_(self.vector[2, :], 0.0) #prior
+ nn.init.constant_(self.vector[3, :], 0.5) #1x1_kxk
+ nn.init.constant_(self.vector[4, :], 0.5) #dws_conv
+
+
+ def fre_init(self):
+ prior_tensor = torch.Tensor(self.out_channels, self.kernel_size, self.kernel_size)
+ half_fg = self.out_channels/2
+ for i in range(self.out_channels):
+ for h in range(3):
+ for w in range(3):
+ if i < half_fg:
+ prior_tensor[i, h, w] = math.cos(math.pi*(h+0.5)*(i+1)/3)
+ else:
+ prior_tensor[i, h, w] = math.cos(math.pi*(w+0.5)*(i+1-half_fg)/3)
+
+ self.register_buffer('weight_rbr_prior', prior_tensor)
+
+ def weight_gen(self):
+
+ weight_rbr_origin = torch.einsum('oihw,o->oihw', self.weight_rbr_origin, self.vector[0, :])
+
+ weight_rbr_avg = torch.einsum('oihw,o->oihw', torch.einsum('oihw,hw->oihw', self.weight_rbr_avg_conv, self.weight_rbr_avg_avg), self.vector[1, :])
+
+ weight_rbr_pfir = torch.einsum('oihw,o->oihw', torch.einsum('oihw,ohw->oihw', self.weight_rbr_pfir_conv, self.weight_rbr_prior), self.vector[2, :])
+
+ weight_rbr_1x1_kxk_conv1 = None
+ if hasattr(self, 'weight_rbr_1x1_kxk_idconv1'):
+ weight_rbr_1x1_kxk_conv1 = (self.weight_rbr_1x1_kxk_idconv1 + self.id_tensor).squeeze()
+ elif hasattr(self, 'weight_rbr_1x1_kxk_conv1'):
+ weight_rbr_1x1_kxk_conv1 = self.weight_rbr_1x1_kxk_conv1.squeeze()
+ else:
+ raise NotImplementedError
+ weight_rbr_1x1_kxk_conv2 = self.weight_rbr_1x1_kxk_conv2
+
+ if self.groups > 1:
+ g = self.groups
+ t, ig = weight_rbr_1x1_kxk_conv1.size()
+ o, tg, h, w = weight_rbr_1x1_kxk_conv2.size()
+ weight_rbr_1x1_kxk_conv1 = weight_rbr_1x1_kxk_conv1.view(g, int(t/g), ig)
+ weight_rbr_1x1_kxk_conv2 = weight_rbr_1x1_kxk_conv2.view(g, int(o/g), tg, h, w)
+ weight_rbr_1x1_kxk = torch.einsum('gti,gothw->goihw', weight_rbr_1x1_kxk_conv1, weight_rbr_1x1_kxk_conv2).view(o, ig, h, w)
+ else:
+ weight_rbr_1x1_kxk = torch.einsum('ti,othw->oihw', weight_rbr_1x1_kxk_conv1, weight_rbr_1x1_kxk_conv2)
+
+ weight_rbr_1x1_kxk = torch.einsum('oihw,o->oihw', weight_rbr_1x1_kxk, self.vector[3, :])
+
+ weight_rbr_gconv = self.dwsc2full(self.weight_rbr_gconv_dw, self.weight_rbr_gconv_pw, self.in_channels)
+ weight_rbr_gconv = torch.einsum('oihw,o->oihw', weight_rbr_gconv, self.vector[4, :])
+
+ weight = weight_rbr_origin + weight_rbr_avg + weight_rbr_1x1_kxk + weight_rbr_pfir + weight_rbr_gconv
+
+ return weight
+
+ def dwsc2full(self, weight_dw, weight_pw, groups):
+
+ t, ig, h, w = weight_dw.size()
+ o, _, _, _ = weight_pw.size()
+ tg = int(t/groups)
+ i = int(ig*groups)
+ weight_dw = weight_dw.view(groups, tg, ig, h, w)
+ weight_pw = weight_pw.squeeze().view(o, groups, tg)
+
+ weight_dsc = torch.einsum('gtihw,ogt->ogihw', weight_dw, weight_pw)
+ return weight_dsc.view(o, i, h, w)
+
+ def forward(self, inputs):
+ weight = self.weight_gen()
+ out = F.conv2d(inputs, weight, bias=None, stride=self.stride, padding=self.padding, dilation=self.dilation, groups=self.groups)
+
+ return self.nonlinear(self.bn(out))
+
+class RepConv_OREPA(nn.Module):
+
+ def __init__(self, c1, c2, k=3, s=1, padding=1, dilation=1, groups=1, padding_mode='zeros', deploy=False, use_se=False, nonlinear=nn.SiLU()):
+ super(RepConv_OREPA, self).__init__()
+ self.deploy = deploy
+ self.groups = groups
+ self.in_channels = c1
+ self.out_channels = c2
+
+ self.padding = padding
+ self.dilation = dilation
+ self.groups = groups
+
+ assert k == 3
+ assert padding == 1
+
+ padding_11 = padding - k // 2
+
+ if nonlinear is None:
+ self.nonlinearity = nn.Identity()
+ else:
+ self.nonlinearity = nonlinear
+
+ if use_se:
+ self.se = SEBlock(self.out_channels, internal_neurons=self.out_channels // 16)
+ else:
+ self.se = nn.Identity()
+
+ if deploy:
+ self.rbr_reparam = nn.Conv2d(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=k, stride=s,
+ padding=padding, dilation=dilation, groups=groups, bias=True, padding_mode=padding_mode)
+
+ else:
+ self.rbr_identity = nn.BatchNorm2d(num_features=self.in_channels) if self.out_channels == self.in_channels and s == 1 else None
+ self.rbr_dense = OREPA_3x3_RepConv(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=k, stride=s, padding=padding, groups=groups, dilation=1)
+ self.rbr_1x1 = ConvBN(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=1, stride=s, padding=padding_11, groups=groups, dilation=1)
+ print('RepVGG Block, identity = ', self.rbr_identity)
+
+
+ def forward(self, inputs):
+ if hasattr(self, 'rbr_reparam'):
+ return self.nonlinearity(self.se(self.rbr_reparam(inputs)))
+
+ if self.rbr_identity is None:
+ id_out = 0
+ else:
+ id_out = self.rbr_identity(inputs)
+
+ out1 = self.rbr_dense(inputs)
+ out2 = self.rbr_1x1(inputs)
+ out3 = id_out
+ out = out1 + out2 + out3
+
+ return self.nonlinearity(self.se(out))
+
+
+ # Optional. This improves the accuracy and facilitates quantization.
+ # 1. Cancel the original weight decay on rbr_dense.conv.weight and rbr_1x1.conv.weight.
+ # 2. Use like this.
+ # loss = criterion(....)
+ # for every RepVGGBlock blk:
+ # loss += weight_decay_coefficient * 0.5 * blk.get_cust_L2()
+ # optimizer.zero_grad()
+ # loss.backward()
+
+ # Not used for OREPA
+ def get_custom_L2(self):
+ K3 = self.rbr_dense.weight_gen()
+ K1 = self.rbr_1x1.conv.weight
+ t3 = (self.rbr_dense.bn.weight / ((self.rbr_dense.bn.running_var + self.rbr_dense.bn.eps).sqrt())).reshape(-1, 1, 1, 1).detach()
+ t1 = (self.rbr_1x1.bn.weight / ((self.rbr_1x1.bn.running_var + self.rbr_1x1.bn.eps).sqrt())).reshape(-1, 1, 1, 1).detach()
+
+ l2_loss_circle = (K3 ** 2).sum() - (K3[:, :, 1:2, 1:2] ** 2).sum() # The L2 loss of the "circle" of weights in 3x3 kernel. Use regular L2 on them.
+ eq_kernel = K3[:, :, 1:2, 1:2] * t3 + K1 * t1 # The equivalent resultant central point of 3x3 kernel.
+ l2_loss_eq_kernel = (eq_kernel ** 2 / (t3 ** 2 + t1 ** 2)).sum() # Normalize for an L2 coefficient comparable to regular L2.
+ return l2_loss_eq_kernel + l2_loss_circle
+
+ def get_equivalent_kernel_bias(self):
+ kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense)
+ kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1)
+ kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity)
+ return kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1) + kernelid, bias3x3 + bias1x1 + biasid
+
+ def _pad_1x1_to_3x3_tensor(self, kernel1x1):
+ if kernel1x1 is None:
+ return 0
+ else:
+ return torch.nn.functional.pad(kernel1x1, [1,1,1,1])
+
+ def _fuse_bn_tensor(self, branch):
+ if branch is None:
+ return 0, 0
+ if not isinstance(branch, nn.BatchNorm2d):
+ if isinstance(branch, OREPA_3x3_RepConv):
+ kernel = branch.weight_gen()
+ elif isinstance(branch, ConvBN):
+ kernel = branch.conv.weight
+ else:
+ raise NotImplementedError
+ running_mean = branch.bn.running_mean
+ running_var = branch.bn.running_var
+ gamma = branch.bn.weight
+ beta = branch.bn.bias
+ eps = branch.bn.eps
+ else:
+ if not hasattr(self, 'id_tensor'):
+ input_dim = self.in_channels // self.groups
+ kernel_value = np.zeros((self.in_channels, input_dim, 3, 3), dtype=np.float32)
+ for i in range(self.in_channels):
+ kernel_value[i, i % input_dim, 1, 1] = 1
+ self.id_tensor = torch.from_numpy(kernel_value).to(branch.weight.device)
+ kernel = self.id_tensor
+ running_mean = branch.running_mean
+ running_var = branch.running_var
+ gamma = branch.weight
+ beta = branch.bias
+ eps = branch.eps
+ std = (running_var + eps).sqrt()
+ t = (gamma / std).reshape(-1, 1, 1, 1)
+ return kernel * t, beta - running_mean * gamma / std
+
+ def switch_to_deploy(self):
+ if hasattr(self, 'rbr_reparam'):
+ return
+ print(f"RepConv_OREPA.switch_to_deploy")
+ kernel, bias = self.get_equivalent_kernel_bias()
+ self.rbr_reparam = nn.Conv2d(in_channels=self.rbr_dense.in_channels, out_channels=self.rbr_dense.out_channels,
+ kernel_size=self.rbr_dense.kernel_size, stride=self.rbr_dense.stride,
+ padding=self.rbr_dense.padding, dilation=self.rbr_dense.dilation, groups=self.rbr_dense.groups, bias=True)
+ self.rbr_reparam.weight.data = kernel
+ self.rbr_reparam.bias.data = bias
+ for para in self.parameters():
+ para.detach_()
+ self.__delattr__('rbr_dense')
+ self.__delattr__('rbr_1x1')
+ if hasattr(self, 'rbr_identity'):
+ self.__delattr__('rbr_identity')
+
+##### end of orepa #####
+
+
+##### swin transformer #####
+
+class WindowAttention(nn.Module):
+
+ def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):
+
+ super().__init__()
+ self.dim = dim
+ self.window_size = window_size # Wh, Ww
+ self.num_heads = num_heads
+ head_dim = dim // num_heads
+ self.scale = qk_scale or head_dim ** -0.5
+
+ # define a parameter table of relative position bias
+ self.relative_position_bias_table = nn.Parameter(
+ torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nH
+
+ # get pair-wise relative position index for each token inside the window
+ coords_h = torch.arange(self.window_size[0])
+ coords_w = torch.arange(self.window_size[1])
+ coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
+ coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
+ relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
+ relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
+ relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
+ relative_coords[:, :, 1] += self.window_size[1] - 1
+ relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
+ relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
+ self.register_buffer("relative_position_index", relative_position_index)
+
+ self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
+ self.attn_drop = nn.Dropout(attn_drop)
+ self.proj = nn.Linear(dim, dim)
+ self.proj_drop = nn.Dropout(proj_drop)
+
+ nn.init.normal_(self.relative_position_bias_table, std=.02)
+ self.softmax = nn.Softmax(dim=-1)
+
+ def forward(self, x, mask=None):
+
+ B_, N, C = x.shape
+ qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
+ q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
+
+ q = q * self.scale
+ attn = (q @ k.transpose(-2, -1))
+
+ relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(
+ self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
+ relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
+ attn = attn + relative_position_bias.unsqueeze(0)
+
+ if mask is not None:
+ nW = mask.shape[0]
+ attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
+ attn = attn.view(-1, self.num_heads, N, N)
+ attn = self.softmax(attn)
+ else:
+ attn = self.softmax(attn)
+
+ attn = self.attn_drop(attn)
+
+ # print(attn.dtype, v.dtype)
+ try:
+ x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
+ except:
+ #print(attn.dtype, v.dtype)
+ x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)
+ x = self.proj(x)
+ x = self.proj_drop(x)
+ return x
+
+class Mlp(nn.Module):
+
+ def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):
+ super().__init__()
+ out_features = out_features or in_features
+ hidden_features = hidden_features or in_features
+ self.fc1 = nn.Linear(in_features, hidden_features)
+ self.act = act_layer()
+ self.fc2 = nn.Linear(hidden_features, out_features)
+ self.drop = nn.Dropout(drop)
+
+ def forward(self, x):
+ x = self.fc1(x)
+ x = self.act(x)
+ x = self.drop(x)
+ x = self.fc2(x)
+ x = self.drop(x)
+ return x
+
+def window_partition(x, window_size):
+
+ B, H, W, C = x.shape
+ assert H % window_size == 0, 'feature map h and w can not divide by window size'
+ x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
+ windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
+ return windows
+
+def window_reverse(windows, window_size, H, W):
+
+ B = int(windows.shape[0] / (H * W / window_size / window_size))
+ x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
+ x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
+ return x
+
+
+class SwinTransformerLayer(nn.Module):
+
+ def __init__(self, dim, num_heads, window_size=8, shift_size=0,
+ mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0.,
+ act_layer=nn.SiLU, norm_layer=nn.LayerNorm):
+ super().__init__()
+ self.dim = dim
+ self.num_heads = num_heads
+ self.window_size = window_size
+ self.shift_size = shift_size
+ self.mlp_ratio = mlp_ratio
+ # if min(self.input_resolution) <= self.window_size:
+ # # if window size is larger than input resolution, we don't partition windows
+ # self.shift_size = 0
+ # self.window_size = min(self.input_resolution)
+ assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
+
+ self.norm1 = norm_layer(dim)
+ self.attn = WindowAttention(
+ dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,
+ qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)
+
+ self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
+ self.norm2 = norm_layer(dim)
+ mlp_hidden_dim = int(dim * mlp_ratio)
+ self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
+
+ def create_mask(self, H, W):
+ # calculate attention mask for SW-MSA
+ img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
+ h_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ w_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ cnt = 0
+ for h in h_slices:
+ for w in w_slices:
+ img_mask[:, h, w, :] = cnt
+ cnt += 1
+
+ mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
+ mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
+ attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
+ attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
+
+ return attn_mask
+
+ def forward(self, x):
+ # reshape x[b c h w] to x[b l c]
+ _, _, H_, W_ = x.shape
+
+ Padding = False
+ if min(H_, W_) < self.window_size or H_ % self.window_size!=0 or W_ % self.window_size!=0:
+ Padding = True
+ # print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')
+ pad_r = (self.window_size - W_ % self.window_size) % self.window_size
+ pad_b = (self.window_size - H_ % self.window_size) % self.window_size
+ x = F.pad(x, (0, pad_r, 0, pad_b))
+
+ # print('2', x.shape)
+ B, C, H, W = x.shape
+ L = H * W
+ x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c
+
+ # create mask from init to forward
+ if self.shift_size > 0:
+ attn_mask = self.create_mask(H, W).to(x.device)
+ else:
+ attn_mask = None
+
+ shortcut = x
+ x = self.norm1(x)
+ x = x.view(B, H, W, C)
+
+ # cyclic shift
+ if self.shift_size > 0:
+ shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
+ else:
+ shifted_x = x
+
+ # partition windows
+ x_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, C
+ x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
+
+ # W-MSA/SW-MSA
+ attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C
+
+ # merge windows
+ attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
+ shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' C
+
+ # reverse cyclic shift
+ if self.shift_size > 0:
+ x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
+ else:
+ x = shifted_x
+ x = x.view(B, H * W, C)
+
+ # FFN
+ x = shortcut + self.drop_path(x)
+ x = x + self.drop_path(self.mlp(self.norm2(x)))
+
+ x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w
+
+ if Padding:
+ x = x[:, :, :H_, :W_] # reverse padding
+
+ return x
+
+
+class SwinTransformerBlock(nn.Module):
+ def __init__(self, c1, c2, num_heads, num_layers, window_size=8):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+
+ # remove input_resolution
+ self.blocks = nn.Sequential(*[SwinTransformerLayer(dim=c2, num_heads=num_heads, window_size=window_size,
+ shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)])
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ x = self.blocks(x)
+ return x
+
+
+class STCSPA(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class STCSPB(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class STCSPC(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+##### end of swin transformer #####
+
+
+##### swin transformer v2 #####
+
+class WindowAttention_v2(nn.Module):
+
+ def __init__(self, dim, window_size, num_heads, qkv_bias=True, attn_drop=0., proj_drop=0.,
+ pretrained_window_size=[0, 0]):
+
+ super().__init__()
+ self.dim = dim
+ self.window_size = window_size # Wh, Ww
+ self.pretrained_window_size = pretrained_window_size
+ self.num_heads = num_heads
+
+ self.logit_scale = nn.Parameter(torch.log(10 * torch.ones((num_heads, 1, 1))), requires_grad=True)
+
+ # mlp to generate continuous relative position bias
+ self.cpb_mlp = nn.Sequential(nn.Linear(2, 512, bias=True),
+ nn.ReLU(inplace=True),
+ nn.Linear(512, num_heads, bias=False))
+
+ # get relative_coords_table
+ relative_coords_h = torch.arange(-(self.window_size[0] - 1), self.window_size[0], dtype=torch.float32)
+ relative_coords_w = torch.arange(-(self.window_size[1] - 1), self.window_size[1], dtype=torch.float32)
+ relative_coords_table = torch.stack(
+ torch.meshgrid([relative_coords_h,
+ relative_coords_w])).permute(1, 2, 0).contiguous().unsqueeze(0) # 1, 2*Wh-1, 2*Ww-1, 2
+ if pretrained_window_size[0] > 0:
+ relative_coords_table[:, :, :, 0] /= (pretrained_window_size[0] - 1)
+ relative_coords_table[:, :, :, 1] /= (pretrained_window_size[1] - 1)
+ else:
+ relative_coords_table[:, :, :, 0] /= (self.window_size[0] - 1)
+ relative_coords_table[:, :, :, 1] /= (self.window_size[1] - 1)
+ relative_coords_table *= 8 # normalize to -8, 8
+ relative_coords_table = torch.sign(relative_coords_table) * torch.log2(
+ torch.abs(relative_coords_table) + 1.0) / np.log2(8)
+
+ self.register_buffer("relative_coords_table", relative_coords_table)
+
+ # get pair-wise relative position index for each token inside the window
+ coords_h = torch.arange(self.window_size[0])
+ coords_w = torch.arange(self.window_size[1])
+ coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
+ coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
+ relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
+ relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
+ relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
+ relative_coords[:, :, 1] += self.window_size[1] - 1
+ relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
+ relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
+ self.register_buffer("relative_position_index", relative_position_index)
+
+ self.qkv = nn.Linear(dim, dim * 3, bias=False)
+ if qkv_bias:
+ self.q_bias = nn.Parameter(torch.zeros(dim))
+ self.v_bias = nn.Parameter(torch.zeros(dim))
+ else:
+ self.q_bias = None
+ self.v_bias = None
+ self.attn_drop = nn.Dropout(attn_drop)
+ self.proj = nn.Linear(dim, dim)
+ self.proj_drop = nn.Dropout(proj_drop)
+ self.softmax = nn.Softmax(dim=-1)
+
+ def forward(self, x, mask=None):
+
+ B_, N, C = x.shape
+ qkv_bias = None
+ if self.q_bias is not None:
+ qkv_bias = torch.cat((self.q_bias, torch.zeros_like(self.v_bias, requires_grad=False), self.v_bias))
+ qkv = F.linear(input=x, weight=self.qkv.weight, bias=qkv_bias)
+ qkv = qkv.reshape(B_, N, 3, self.num_heads, -1).permute(2, 0, 3, 1, 4)
+ q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
+
+ # cosine attention
+ attn = (F.normalize(q, dim=-1) @ F.normalize(k, dim=-1).transpose(-2, -1))
+ logit_scale = torch.clamp(self.logit_scale, max=torch.log(torch.tensor(1. / 0.01))).exp()
+ attn = attn * logit_scale
+
+ relative_position_bias_table = self.cpb_mlp(self.relative_coords_table).view(-1, self.num_heads)
+ relative_position_bias = relative_position_bias_table[self.relative_position_index.view(-1)].view(
+ self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
+ relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
+ relative_position_bias = 16 * torch.sigmoid(relative_position_bias)
+ attn = attn + relative_position_bias.unsqueeze(0)
+
+ if mask is not None:
+ nW = mask.shape[0]
+ attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
+ attn = attn.view(-1, self.num_heads, N, N)
+ attn = self.softmax(attn)
+ else:
+ attn = self.softmax(attn)
+
+ attn = self.attn_drop(attn)
+
+ try:
+ x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
+ except:
+ x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)
+
+ x = self.proj(x)
+ x = self.proj_drop(x)
+ return x
+
+ def extra_repr(self) -> str:
+ return f'dim={self.dim}, window_size={self.window_size}, ' \
+ f'pretrained_window_size={self.pretrained_window_size}, num_heads={self.num_heads}'
+
+ def flops(self, N):
+ # calculate flops for 1 window with token length of N
+ flops = 0
+ # qkv = self.qkv(x)
+ flops += N * self.dim * 3 * self.dim
+ # attn = (q @ k.transpose(-2, -1))
+ flops += self.num_heads * N * (self.dim // self.num_heads) * N
+ # x = (attn @ v)
+ flops += self.num_heads * N * N * (self.dim // self.num_heads)
+ # x = self.proj(x)
+ flops += N * self.dim * self.dim
+ return flops
+
+class Mlp_v2(nn.Module):
+ def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):
+ super().__init__()
+ out_features = out_features or in_features
+ hidden_features = hidden_features or in_features
+ self.fc1 = nn.Linear(in_features, hidden_features)
+ self.act = act_layer()
+ self.fc2 = nn.Linear(hidden_features, out_features)
+ self.drop = nn.Dropout(drop)
+
+ def forward(self, x):
+ x = self.fc1(x)
+ x = self.act(x)
+ x = self.drop(x)
+ x = self.fc2(x)
+ x = self.drop(x)
+ return x
+
+
+def window_partition_v2(x, window_size):
+
+ B, H, W, C = x.shape
+ x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
+ windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
+ return windows
+
+
+def window_reverse_v2(windows, window_size, H, W):
+
+ B = int(windows.shape[0] / (H * W / window_size / window_size))
+ x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
+ x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
+ return x
+
+
+class SwinTransformerLayer_v2(nn.Module):
+
+ def __init__(self, dim, num_heads, window_size=7, shift_size=0,
+ mlp_ratio=4., qkv_bias=True, drop=0., attn_drop=0., drop_path=0.,
+ act_layer=nn.SiLU, norm_layer=nn.LayerNorm, pretrained_window_size=0):
+ super().__init__()
+ self.dim = dim
+ #self.input_resolution = input_resolution
+ self.num_heads = num_heads
+ self.window_size = window_size
+ self.shift_size = shift_size
+ self.mlp_ratio = mlp_ratio
+ #if min(self.input_resolution) <= self.window_size:
+ # # if window size is larger than input resolution, we don't partition windows
+ # self.shift_size = 0
+ # self.window_size = min(self.input_resolution)
+ assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
+
+ self.norm1 = norm_layer(dim)
+ self.attn = WindowAttention_v2(
+ dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,
+ qkv_bias=qkv_bias, attn_drop=attn_drop, proj_drop=drop,
+ pretrained_window_size=(pretrained_window_size, pretrained_window_size))
+
+ self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
+ self.norm2 = norm_layer(dim)
+ mlp_hidden_dim = int(dim * mlp_ratio)
+ self.mlp = Mlp_v2(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
+
+ def create_mask(self, H, W):
+ # calculate attention mask for SW-MSA
+ img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
+ h_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ w_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ cnt = 0
+ for h in h_slices:
+ for w in w_slices:
+ img_mask[:, h, w, :] = cnt
+ cnt += 1
+
+ mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
+ mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
+ attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
+ attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
+
+ return attn_mask
+
+ def forward(self, x):
+ # reshape x[b c h w] to x[b l c]
+ _, _, H_, W_ = x.shape
+
+ Padding = False
+ if min(H_, W_) < self.window_size or H_ % self.window_size!=0 or W_ % self.window_size!=0:
+ Padding = True
+ # print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')
+ pad_r = (self.window_size - W_ % self.window_size) % self.window_size
+ pad_b = (self.window_size - H_ % self.window_size) % self.window_size
+ x = F.pad(x, (0, pad_r, 0, pad_b))
+
+ # print('2', x.shape)
+ B, C, H, W = x.shape
+ L = H * W
+ x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c
+
+ # create mask from init to forward
+ if self.shift_size > 0:
+ attn_mask = self.create_mask(H, W).to(x.device)
+ else:
+ attn_mask = None
+
+ shortcut = x
+ x = x.view(B, H, W, C)
+
+ # cyclic shift
+ if self.shift_size > 0:
+ shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
+ else:
+ shifted_x = x
+
+ # partition windows
+ x_windows = window_partition_v2(shifted_x, self.window_size) # nW*B, window_size, window_size, C
+ x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
+
+ # W-MSA/SW-MSA
+ attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C
+
+ # merge windows
+ attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
+ shifted_x = window_reverse_v2(attn_windows, self.window_size, H, W) # B H' W' C
+
+ # reverse cyclic shift
+ if self.shift_size > 0:
+ x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
+ else:
+ x = shifted_x
+ x = x.view(B, H * W, C)
+ x = shortcut + self.drop_path(self.norm1(x))
+
+ # FFN
+ x = x + self.drop_path(self.norm2(self.mlp(x)))
+ x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w
+
+ if Padding:
+ x = x[:, :, :H_, :W_] # reverse padding
+
+ return x
+
+ def extra_repr(self) -> str:
+ return f"dim={self.dim}, input_resolution={self.input_resolution}, num_heads={self.num_heads}, " \
+ f"window_size={self.window_size}, shift_size={self.shift_size}, mlp_ratio={self.mlp_ratio}"
+
+ def flops(self):
+ flops = 0
+ H, W = self.input_resolution
+ # norm1
+ flops += self.dim * H * W
+ # W-MSA/SW-MSA
+ nW = H * W / self.window_size / self.window_size
+ flops += nW * self.attn.flops(self.window_size * self.window_size)
+ # mlp
+ flops += 2 * H * W * self.dim * self.dim * self.mlp_ratio
+ # norm2
+ flops += self.dim * H * W
+ return flops
+
+
+class SwinTransformer2Block(nn.Module):
+ def __init__(self, c1, c2, num_heads, num_layers, window_size=7):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+
+ # remove input_resolution
+ self.blocks = nn.Sequential(*[SwinTransformerLayer_v2(dim=c2, num_heads=num_heads, window_size=window_size,
+ shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)])
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ x = self.blocks(x)
+ return x
+
+
+class ST2CSPA(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class ST2CSPB(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class ST2CSPC(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+##### end of swin transformer v2 #####
diff --git a/oneAPI_ODAV_APP/ENGINES/models/experimental.py b/oneAPI_ODAV_APP/ENGINES/models/experimental.py
new file mode 100644
index 000000000..7ee57156b
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/models/experimental.py
@@ -0,0 +1,273 @@
+import numpy as np
+import random
+import torch
+import torch.nn as nn
+
+
+from models.common import Conv, DWConv
+from utils.google_utils import attempt_download
+
+
+class CrossConv(nn.Module):
+ # Cross Convolution Downsample
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False):
+ # ch_in, ch_out, kernel, stride, groups, expansion, shortcut
+ super(CrossConv, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, (1, k), (1, s))
+ self.cv2 = Conv(c_, c2, (k, 1), (s, 1), g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class Sum(nn.Module):
+ # Weighted sum of 2 or more layers https://arxiv.org/abs/1911.09070
+ def __init__(self, n, weight=False): # n: number of inputs
+ super(Sum, self).__init__()
+ self.weight = weight # apply weights boolean
+ self.iter = range(n - 1) # iter object
+ if weight:
+ self.w = nn.Parameter(-torch.arange(1., n) / 2, requires_grad=True) # layer weights
+
+ def forward(self, x):
+ y = x[0] # no weight
+ if self.weight:
+ w = torch.sigmoid(self.w) * 2
+ for i in self.iter:
+ y = y + x[i + 1] * w[i]
+ else:
+ for i in self.iter:
+ y = y + x[i + 1]
+ return y
+
+
+class MixConv2d(nn.Module):
+ # Mixed Depthwise Conv https://arxiv.org/abs/1907.09595
+ def __init__(self, c1, c2, k=(1, 3), s=1, equal_ch=True):
+ super(MixConv2d, self).__init__()
+ groups = len(k)
+ if equal_ch: # equal c_ per group
+ i = torch.linspace(0, groups - 1E-6, c2).floor() # c2 indices
+ c_ = [(i == g).sum() for g in range(groups)] # intermediate channels
+ else: # equal weight.numel() per group
+ b = [c2] + [0] * groups
+ a = np.eye(groups + 1, groups, k=-1)
+ a -= np.roll(a, 1, axis=1)
+ a *= np.array(k) ** 2
+ a[0] = 1
+ c_ = np.linalg.lstsq(a, b, rcond=None)[0].round() # solve for equal weight indices, ax = b
+
+ self.m = nn.ModuleList([nn.Conv2d(c1, int(c_[g]), k[g], s, k[g] // 2, bias=False) for g in range(groups)])
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.LeakyReLU(0.1, inplace=True)
+
+ def forward(self, x):
+ return x + self.act(self.bn(torch.cat([m(x) for m in self.m], 1)))
+
+
+class Ensemble(nn.ModuleList):
+ # Ensemble of models
+ def __init__(self):
+ super(Ensemble, self).__init__()
+
+ def forward(self, x, augment=False):
+ y = []
+ for module in self:
+ y.append(module(x, augment)[0])
+ # y = torch.stack(y).max(0)[0] # max ensemble
+ # y = torch.stack(y).mean(0) # mean ensemble
+ y = torch.cat(y, 1) # nms ensemble
+ return y, None # inference, train output
+
+
+
+
+
+class ORT_NMS(torch.autograd.Function):
+ '''ONNX-Runtime NMS operation'''
+ @staticmethod
+ def forward(ctx,
+ boxes,
+ scores,
+ max_output_boxes_per_class=torch.tensor([100]),
+ iou_threshold=torch.tensor([0.45]),
+ score_threshold=torch.tensor([0.25])):
+ device = boxes.device
+ batch = scores.shape[0]
+ num_det = random.randint(0, 100)
+ batches = torch.randint(0, batch, (num_det,)).sort()[0].to(device)
+ idxs = torch.arange(100, 100 + num_det).to(device)
+ zeros = torch.zeros((num_det,), dtype=torch.int64).to(device)
+ selected_indices = torch.cat([batches[None], zeros[None], idxs[None]], 0).T.contiguous()
+ selected_indices = selected_indices.to(torch.int64)
+ return selected_indices
+
+ @staticmethod
+ def symbolic(g, boxes, scores, max_output_boxes_per_class, iou_threshold, score_threshold):
+ return g.op("NonMaxSuppression", boxes, scores, max_output_boxes_per_class, iou_threshold, score_threshold)
+
+
+class TRT_NMS(torch.autograd.Function):
+ '''TensorRT NMS operation'''
+ @staticmethod
+ def forward(
+ ctx,
+ boxes,
+ scores,
+ background_class=-1,
+ box_coding=1,
+ iou_threshold=0.45,
+ max_output_boxes=100,
+ plugin_version="1",
+ score_activation=0,
+ score_threshold=0.25,
+ ):
+ batch_size, num_boxes, num_classes = scores.shape
+ num_det = torch.randint(0, max_output_boxes, (batch_size, 1), dtype=torch.int32)
+ det_boxes = torch.randn(batch_size, max_output_boxes, 4)
+ det_scores = torch.randn(batch_size, max_output_boxes)
+ det_classes = torch.randint(0, num_classes, (batch_size, max_output_boxes), dtype=torch.int32)
+ return num_det, det_boxes, det_scores, det_classes
+
+ @staticmethod
+ def symbolic(g,
+ boxes,
+ scores,
+ background_class=-1,
+ box_coding=1,
+ iou_threshold=0.45,
+ max_output_boxes=100,
+ plugin_version="1",
+ score_activation=0,
+ score_threshold=0.25):
+ out = g.op("TRT::EfficientNMS_TRT",
+ boxes,
+ scores,
+ background_class_i=background_class,
+ box_coding_i=box_coding,
+ iou_threshold_f=iou_threshold,
+ max_output_boxes_i=max_output_boxes,
+ plugin_version_s=plugin_version,
+ score_activation_i=score_activation,
+ score_threshold_f=score_threshold,
+ outputs=4)
+ nums, boxes, scores, classes = out
+ return nums, boxes, scores, classes
+
+
+class ONNX_ORT(nn.Module):
+ '''onnx module with ONNX-Runtime NMS operation.'''
+ def __init__(self, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=640, device=None, n_classes=80):
+ super().__init__()
+ self.device = device if device else torch.device("cpu")
+ self.max_obj = torch.tensor([max_obj]).to(device)
+ self.iou_threshold = torch.tensor([iou_thres]).to(device)
+ self.score_threshold = torch.tensor([score_thres]).to(device)
+ self.max_wh = max_wh # if max_wh != 0 : non-agnostic else : agnostic
+ self.convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=self.device)
+ self.n_classes=n_classes
+
+ def forward(self, x):
+ boxes = x[:, :, :4]
+ conf = x[:, :, 4:5]
+ scores = x[:, :, 5:]
+ if self.n_classes == 1:
+ scores = conf # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ scores *= conf # conf = obj_conf * cls_conf
+ boxes @= self.convert_matrix
+ max_score, category_id = scores.max(2, keepdim=True)
+ dis = category_id.float() * self.max_wh
+ nmsbox = boxes + dis
+ max_score_tp = max_score.transpose(1, 2).contiguous()
+ selected_indices = ORT_NMS.apply(nmsbox, max_score_tp, self.max_obj, self.iou_threshold, self.score_threshold)
+ X, Y = selected_indices[:, 0], selected_indices[:, 2]
+ selected_boxes = boxes[X, Y, :]
+ selected_categories = category_id[X, Y, :].float()
+ selected_scores = max_score[X, Y, :]
+ X = X.unsqueeze(1).float()
+ return torch.cat([X, selected_boxes, selected_categories, selected_scores], 1)
+
+class ONNX_TRT(nn.Module):
+ '''onnx module with TensorRT NMS operation.'''
+ def __init__(self, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=None ,device=None, n_classes=80):
+ super().__init__()
+ assert max_wh is None
+ self.device = device if device else torch.device('cpu')
+ self.background_class = -1,
+ self.box_coding = 1,
+ self.iou_threshold = iou_thres
+ self.max_obj = max_obj
+ self.plugin_version = '1'
+ self.score_activation = 0
+ self.score_threshold = score_thres
+ self.n_classes=n_classes
+
+ def forward(self, x):
+ boxes = x[:, :, :4]
+ conf = x[:, :, 4:5]
+ scores = x[:, :, 5:]
+ if self.n_classes == 1:
+ scores = conf # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ scores *= conf # conf = obj_conf * cls_conf
+ num_det, det_boxes, det_scores, det_classes = TRT_NMS.apply(boxes, scores, self.background_class, self.box_coding,
+ self.iou_threshold, self.max_obj,
+ self.plugin_version, self.score_activation,
+ self.score_threshold)
+ return num_det, det_boxes, det_scores, det_classes
+
+
+class End2End(nn.Module):
+ '''export onnx or tensorrt model with NMS operation.'''
+ def __init__(self, model, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=None, device=None, n_classes=80):
+ super().__init__()
+ device = device if device else torch.device('cpu')
+ assert isinstance(max_wh,(int)) or max_wh is None
+ self.model = model.to(device)
+ self.model.model[-1].end2end = True
+ self.patch_model = ONNX_TRT if max_wh is None else ONNX_ORT
+ self.end2end = self.patch_model(max_obj, iou_thres, score_thres, max_wh, device, n_classes)
+ self.end2end.eval()
+
+ def forward(self, x):
+ x = self.model(x)
+ x = self.end2end(x)
+ return x
+
+
+
+
+
+def attempt_load(weights, map_location=None):
+ # Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a
+ model = Ensemble()
+ for w in weights if isinstance(weights, list) else [weights]:
+ attempt_download(w)
+ ckpt = torch.load(w, map_location=map_location) # load
+ model.append(ckpt['ema' if ckpt.get('ema') else 'model'].float().fuse().eval()) # FP32 model
+
+ # Compatibility updates
+ for m in model.modules():
+ if type(m) in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
+ m.inplace = True # pytorch 1.7.0 compatibility
+ elif type(m) is nn.Upsample:
+ m.recompute_scale_factor = None # torch 1.11.0 compatibility
+ elif type(m) is Conv:
+ m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatibility
+
+ if len(model) == 1:
+ return model[-1] # return model
+ else:
+ print('Ensemble created with %s\n' % weights)
+ for k in ['names', 'stride']:
+ setattr(model, k, getattr(model[-1], k))
+ return model # return ensemble
+
+
diff --git a/oneAPI_ODAV_APP/ENGINES/models/yolo.py b/oneAPI_ODAV_APP/ENGINES/models/yolo.py
new file mode 100644
index 000000000..222a962e2
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/models/yolo.py
@@ -0,0 +1,844 @@
+import argparse
+import logging
+import sys
+from copy import deepcopy
+
+
+sys.path.append('./') # to run '$ python *.py' files in subdirectories
+logger = logging.getLogger(__name__)
+import torch
+from models.common import *
+from models.experimental import *
+from utils.autoanchor import check_anchor_order
+from utils.general import make_divisible, check_file, set_logging
+from utils.torch_utils import time_synchronized, fuse_conv_and_bn, model_info, scale_img, initialize_weights, \
+ select_device, copy_attr
+from utils.loss import SigmoidBin
+
+try:
+ import thop # for FLOPS computation
+except ImportError:
+ thop = None
+
+
+class Detect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(Detect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IDetect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(IDetect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ def fuseforward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ def fuse(self):
+ print("IDetect.fuse")
+ # fuse ImplicitA and Convolution
+ for i in range(len(self.m)):
+ c1,c2,_,_ = self.m[i].weight.shape
+ c1_,c2_, _,_ = self.ia[i].implicit.shape
+ self.m[i].bias += torch.matmul(self.m[i].weight.reshape(c1,c2),self.ia[i].implicit.reshape(c2_,c1_)).squeeze(1)
+
+ # fuse ImplicitM and Convolution
+ for i in range(len(self.m)):
+ c1,c2, _,_ = self.im[i].implicit.shape
+ self.m[i].bias *= self.im[i].implicit.reshape(c2)
+ self.m[i].weight *= self.im[i].implicit.transpose(0,1)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IKeypoint(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, nc=80, anchors=(), nkpt=17, ch=(), inplace=True, dw_conv_kpt=False): # detection layer
+ super(IKeypoint, self).__init__()
+ self.nc = nc # number of classes
+ self.nkpt = nkpt
+ self.dw_conv_kpt = dw_conv_kpt
+ self.no_det=(nc + 5) # number of outputs per anchor for box and class
+ self.no_kpt = 3*self.nkpt ## number of outputs per anchor for keypoints
+ self.no = self.no_det+self.no_kpt
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ self.flip_test = False
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no_det * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no_det * self.na) for _ in ch)
+
+ if self.nkpt is not None:
+ if self.dw_conv_kpt: #keypoint head is slightly more complex
+ self.m_kpt = nn.ModuleList(
+ nn.Sequential(DWConv(x, x, k=3), Conv(x,x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), Conv(x,x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), nn.Conv2d(x, self.no_kpt * self.na, 1)) for x in ch)
+ else: #keypoint head is a single convolution
+ self.m_kpt = nn.ModuleList(nn.Conv2d(x, self.no_kpt * self.na, 1) for x in ch)
+
+ self.inplace = inplace # use in-place ops (e.g. slice assignment)
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ if self.nkpt is None or self.nkpt==0:
+ x[i] = self.im[i](self.m[i](self.ia[i](x[i]))) # conv
+ else :
+ x[i] = torch.cat((self.im[i](self.m[i](self.ia[i](x[i]))), self.m_kpt[i](x[i])), axis=1)
+
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+ x_det = x[i][..., :6]
+ x_kpt = x[i][..., 6:]
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+ kpt_grid_x = self.grid[i][..., 0:1]
+ kpt_grid_y = self.grid[i][..., 1:2]
+
+ if self.nkpt == 0:
+ y = x[i].sigmoid()
+ else:
+ y = x_det.sigmoid()
+
+ if self.inplace:
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i].view(1, self.na, 1, 1, 2) # wh
+ if self.nkpt != 0:
+ x_kpt[..., 0::3] = (x_kpt[..., ::3] * 2. - 0.5 + kpt_grid_x.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ x_kpt[..., 1::3] = (x_kpt[..., 1::3] * 2. - 0.5 + kpt_grid_y.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #x_kpt[..., 0::3] = (x_kpt[..., ::3] + kpt_grid_x.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = (x_kpt[..., 1::3] + kpt_grid_y.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #print('=============')
+ #print(self.anchor_grid[i].shape)
+ #print(self.anchor_grid[i][...,0].unsqueeze(4).shape)
+ #print(x_kpt[..., 0::3].shape)
+ #x_kpt[..., 0::3] = ((x_kpt[..., 0::3].tanh() * 2.) ** 3 * self.anchor_grid[i][...,0].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_x.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = ((x_kpt[..., 1::3].tanh() * 2.) ** 3 * self.anchor_grid[i][...,1].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_y.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 0::3] = (((x_kpt[..., 0::3].sigmoid() * 4.) ** 2 - 8.) * self.anchor_grid[i][...,0].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_x.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = (((x_kpt[..., 1::3].sigmoid() * 4.) ** 2 - 8.) * self.anchor_grid[i][...,1].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_y.repeat(1,1,1,1,17) * self.stride[i] # xy
+ x_kpt[..., 2::3] = x_kpt[..., 2::3].sigmoid()
+
+ y = torch.cat((xy, wh, y[..., 4:], x_kpt), dim = -1)
+
+ else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ if self.nkpt != 0:
+ y[..., 6:] = (y[..., 6:] * 2. - 0.5 + self.grid[i].repeat((1,1,1,1,self.nkpt))) * self.stride[i] # xy
+ y = torch.cat((xy, wh, y[..., 4:]), -1)
+
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+
+class IAuxDetect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(IAuxDetect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[:self.nl]) # output conv
+ self.m2 = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[self.nl:]) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch[:self.nl])
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch[:self.nl])
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ x[i+self.nl] = self.m2[i](x[i+self.nl])
+ x[i+self.nl] = x[i+self.nl].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x[:self.nl])
+
+ def fuseforward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i].data # wh
+ y = torch.cat((xy, wh, y[..., 4:]), -1)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ def fuse(self):
+ print("IAuxDetect.fuse")
+ # fuse ImplicitA and Convolution
+ for i in range(len(self.m)):
+ c1,c2,_,_ = self.m[i].weight.shape
+ c1_,c2_, _,_ = self.ia[i].implicit.shape
+ self.m[i].bias += torch.matmul(self.m[i].weight.reshape(c1,c2),self.ia[i].implicit.reshape(c2_,c1_)).squeeze(1)
+
+ # fuse ImplicitM and Convolution
+ for i in range(len(self.m)):
+ c1,c2, _,_ = self.im[i].implicit.shape
+ self.m[i].bias *= self.im[i].implicit.reshape(c2)
+ self.m[i].weight *= self.im[i].implicit.transpose(0,1)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IBin(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, nc=80, anchors=(), ch=(), bin_count=21): # detection layer
+ super(IBin, self).__init__()
+ self.nc = nc # number of classes
+ self.bin_count = bin_count
+
+ self.w_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0)
+ self.h_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0)
+ # classes, x,y,obj
+ self.no = nc + 3 + \
+ self.w_bin_sigmoid.get_length() + self.h_bin_sigmoid.get_length() # w-bce, h-bce
+ # + self.x_bin_sigmoid.get_length() + self.y_bin_sigmoid.get_length()
+
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
+
+ def forward(self, x):
+
+ #self.x_bin_sigmoid.use_fw_regression = True
+ #self.y_bin_sigmoid.use_fw_regression = True
+ self.w_bin_sigmoid.use_fw_regression = True
+ self.h_bin_sigmoid.use_fw_regression = True
+
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ #y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+
+
+ #px = (self.x_bin_sigmoid.forward(y[..., 0:12]) + self.grid[i][..., 0]) * self.stride[i]
+ #py = (self.y_bin_sigmoid.forward(y[..., 12:24]) + self.grid[i][..., 1]) * self.stride[i]
+
+ pw = self.w_bin_sigmoid.forward(y[..., 2:24]) * self.anchor_grid[i][..., 0]
+ ph = self.h_bin_sigmoid.forward(y[..., 24:46]) * self.anchor_grid[i][..., 1]
+
+ #y[..., 0] = px
+ #y[..., 1] = py
+ y[..., 2] = pw
+ y[..., 3] = ph
+
+ y = torch.cat((y[..., 0:4], y[..., 46:]), dim=-1)
+
+ z.append(y.view(bs, -1, y.shape[-1]))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+
+class Model(nn.Module):
+ def __init__(self, cfg='yolor-csp-c.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classes
+ super(Model, self).__init__()
+ self.traced = False
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg) as f:
+ self.yaml = yaml.load(f, Loader=yaml.SafeLoader) # model dict
+
+ # Define model
+ ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels
+ if nc and nc != self.yaml['nc']:
+ logger.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ if anchors:
+ logger.info(f'Overriding model.yaml anchors with anchors={anchors}')
+ self.yaml['anchors'] = round(anchors) # override yaml value
+ self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist
+ self.names = [str(i) for i in range(self.yaml['nc'])] # default names
+ # print([x.shape for x in self.forward(torch.zeros(1, ch, 64, 64))])
+
+ # Build strides, anchors
+ m = self.model[-1] # Detect()
+ if isinstance(m, Detect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IDetect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IAuxDetect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))[:4]]) # forward
+ #print(m.stride)
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_aux_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IBin):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases_bin() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IKeypoint):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases_kpt() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+
+ # Init weights, biases
+ initialize_weights(self)
+ self.info()
+ logger.info('')
+
+ def forward(self, x, augment=False, profile=False):
+ if augment:
+ img_size = x.shape[-2:] # height, width
+ s = [1, 0.83, 0.67] # scales
+ f = [None, 3, None] # flips (2-ud, 3-lr)
+ y = [] # outputs
+ for si, fi in zip(s, f):
+ xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
+ yi = self.forward_once(xi)[0] # forward
+ # cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # save
+ yi[..., :4] /= si # de-scale
+ if fi == 2:
+ yi[..., 1] = img_size[0] - yi[..., 1] # de-flip ud
+ elif fi == 3:
+ yi[..., 0] = img_size[1] - yi[..., 0] # de-flip lr
+ y.append(yi)
+ return torch.cat(y, 1), None # augmented inference, train
+ else:
+ return self.forward_once(x, profile) # single-scale inference, train
+
+ def forward_once(self, x, profile=False):
+ y, dt = [], [] # outputs
+ for m in self.model:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+
+ if not hasattr(self, 'traced'):
+ self.traced=False
+
+ if self.traced:
+ if isinstance(m, Detect) or isinstance(m, IDetect) or isinstance(m, IAuxDetect) or isinstance(m, IKeypoint):
+ break
+
+ if profile:
+ c = isinstance(m, (Detect, IDetect, IAuxDetect, IBin))
+ o = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPS
+ for _ in range(10):
+ m(x.copy() if c else x)
+ t = time_synchronized()
+ for _ in range(10):
+ m(x.copy() if c else x)
+ dt.append((time_synchronized() - t) * 100)
+ print('%10.1f%10.0f%10.1fms %-40s' % (o, m.np, dt[-1], m.type))
+
+ x = m(x) # run
+
+ y.append(x if m.i in self.save else None) # save output
+
+ if profile:
+ print('%.1fms total' % sum(dt))
+ return x
+
+ def _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _initialize_aux_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, mi2, s in zip(m.m, m.m2, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+ b2 = mi2.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b2.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b2.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi2.bias = torch.nn.Parameter(b2.view(-1), requires_grad=True)
+
+ def _initialize_biases_bin(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Bin() module
+ bc = m.bin_count
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ old = b[:, (0,1,2,bc+3)].data
+ obj_idx = 2*bc+4
+ b[:, :obj_idx].data += math.log(0.6 / (bc + 1 - 0.99))
+ b[:, obj_idx].data += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b[:, (obj_idx+1):].data += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ b[:, (0,1,2,bc+3)].data = old
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _initialize_biases_kpt(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _print_biases(self):
+ m = self.model[-1] # Detect() module
+ for mi in m.m: # from
+ b = mi.bias.detach().view(m.na, -1).T # conv.bias(255) to (3,85)
+ print(('%6g Conv2d.bias:' + '%10.3g' * 6) % (mi.weight.shape[1], *b[:5].mean(1).tolist(), b[5:].mean()))
+
+ # def _print_weights(self):
+ # for m in self.model.modules():
+ # if type(m) is Bottleneck:
+ # print('%10.3g' % (m.w.detach().sigmoid() * 2)) # shortcut weights
+
+ def fuse(self): # fuse model Conv2d() + BatchNorm2d() layers
+ print('Fusing layers... ')
+ for m in self.model.modules():
+ if isinstance(m, RepConv):
+ #print(f" fuse_repvgg_block")
+ m.fuse_repvgg_block()
+ elif isinstance(m, RepConv_OREPA):
+ #print(f" switch_to_deploy")
+ m.switch_to_deploy()
+ elif type(m) is Conv and hasattr(m, 'bn'):
+ m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
+ delattr(m, 'bn') # remove batchnorm
+ m.forward = m.fuseforward # update forward
+ elif isinstance(m, (IDetect, IAuxDetect)):
+ m.fuse()
+ m.forward = m.fuseforward
+ self.info()
+ return self
+
+ def nms(self, mode=True): # add or remove NMS module
+ present = type(self.model[-1]) is NMS # last layer is NMS
+ if mode and not present:
+ print('Adding NMS... ')
+ m = NMS() # module
+ m.f = -1 # from
+ m.i = self.model[-1].i + 1 # index
+ self.model.add_module(name='%s' % m.i, module=m) # add
+ self.eval()
+ elif not mode and present:
+ print('Removing NMS... ')
+ self.model = self.model[:-1] # remove
+ return self
+
+ def autoshape(self): # add autoShape module
+ print('Adding autoShape... ')
+ m = autoShape(self) # wrap model
+ copy_attr(m, self, include=('yaml', 'nc', 'hyp', 'names', 'stride'), exclude=()) # copy attributes
+ return m
+
+ def info(self, verbose=False, img_size=640): # print model information
+ model_info(self, verbose, img_size)
+
+
+def parse_model(d, ch): # model_dict, input_channels(3)
+ logger.info('\n%3s%18s%3s%10s %-40s%-30s' % ('', 'from', 'n', 'params', 'module', 'arguments'))
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ try:
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+ except:
+ pass
+
+ n = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in [nn.Conv2d, Conv, RobustConv, RobustConv2, DWConv, GhostConv, RepConv, RepConv_OREPA, DownC,
+ SPP, SPPF, SPPCSPC, GhostSPPCSPC, MixConv2d, Focus, Stem, GhostStem, CrossConv,
+ Bottleneck, BottleneckCSPA, BottleneckCSPB, BottleneckCSPC,
+ RepBottleneck, RepBottleneckCSPA, RepBottleneckCSPB, RepBottleneckCSPC,
+ Res, ResCSPA, ResCSPB, ResCSPC,
+ RepRes, RepResCSPA, RepResCSPB, RepResCSPC,
+ ResX, ResXCSPA, ResXCSPB, ResXCSPC,
+ RepResX, RepResXCSPA, RepResXCSPB, RepResXCSPC,
+ Ghost, GhostCSPA, GhostCSPB, GhostCSPC,
+ SwinTransformerBlock, STCSPA, STCSPB, STCSPC,
+ SwinTransformer2Block, ST2CSPA, ST2CSPB, ST2CSPC]:
+ c1, c2 = ch[f], args[0]
+ if c2 != no: # if not output
+ c2 = make_divisible(c2 * gw, 8)
+
+ args = [c1, c2, *args[1:]]
+ if m in [DownC, SPPCSPC, GhostSPPCSPC,
+ BottleneckCSPA, BottleneckCSPB, BottleneckCSPC,
+ RepBottleneckCSPA, RepBottleneckCSPB, RepBottleneckCSPC,
+ ResCSPA, ResCSPB, ResCSPC,
+ RepResCSPA, RepResCSPB, RepResCSPC,
+ ResXCSPA, ResXCSPB, ResXCSPC,
+ RepResXCSPA, RepResXCSPB, RepResXCSPC,
+ GhostCSPA, GhostCSPB, GhostCSPC,
+ STCSPA, STCSPB, STCSPC,
+ ST2CSPA, ST2CSPB, ST2CSPC]:
+ args.insert(2, n) # number of repeats
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum([ch[x] for x in f])
+ elif m is Chuncat:
+ c2 = sum([ch[x] for x in f])
+ elif m is Shortcut:
+ c2 = ch[f[0]]
+ elif m is Foldcut:
+ c2 = ch[f] // 2
+ elif m in [Detect, IDetect, IAuxDetect, IBin, IKeypoint]:
+ args.append([ch[x] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ elif m is ReOrg:
+ c2 = ch[f] * 4
+ elif m is Contract:
+ c2 = ch[f] * args[0] ** 2
+ elif m is Expand:
+ c2 = ch[f] // args[0] ** 2
+ else:
+ c2 = ch[f]
+
+ m_ = nn.Sequential(*[m(*args) for _ in range(n)]) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum([x.numel() for x in m_.parameters()]) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ logger.info('%3s%18s%3s%10.0f %-40s%-30s' % (i, f, n, np, t, args)) # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ if i == 0:
+ ch = []
+ ch.append(c2)
+ return nn.Sequential(*layers), sorted(save)
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--cfg', type=str, default='yolor-csp-c.yaml', help='model.yaml')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--profile', action='store_true', help='profile model speed')
+ opt = parser.parse_args()
+ opt.cfg = check_file(opt.cfg) # check file
+ set_logging()
+ device = select_device(opt.device)
+
+ # Create model
+ model = Model(opt.cfg).to(device)
+ model.train()
+
+ if opt.profile:
+ img = torch.rand(1, 3, 640, 640).to(device)
+ y = model(img, profile=True)
+
+ # Profile
+ # img = torch.rand(8 if torch.cuda.is_available() else 1, 3, 640, 640).to(device)
+ # y = model(img, profile=True)
+
+ # Tensorboard
+ # from torch.utils.tensorboard import SummaryWriter
+ # tb_writer = SummaryWriter()
+ # print("Run 'tensorboard --logdir=models/runs' to view tensorboard at http://localhost:6006/")
+ # tb_writer.add_graph(model.model, img) # add model to tensorboard
+ # tb_writer.add_image('test', img[0], dataformats='CWH') # add model to tensorboard
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/__init__.py b/oneAPI_ODAV_APP/ENGINES/utils/__init__.py
new file mode 100644
index 000000000..a6131c10e
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/__init__.py
@@ -0,0 +1 @@
+# init
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/activations.py b/oneAPI_ODAV_APP/ENGINES/utils/activations.py
new file mode 100644
index 000000000..5ad1735d7
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/activations.py
@@ -0,0 +1,73 @@
+# Activation functions
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+
+# SiLU https://arxiv.org/pdf/1606.08415.pdf ----------------------------------------------------------------------------
+class SiLU(nn.Module): # export-friendly version of nn.SiLU()
+ @staticmethod
+ def forward(x):
+ return x * torch.sigmoid(x)
+
+
+
+class Hardswish(nn.Module): # export-friendly version of nn.Hardswish()
+ @staticmethod
+ def forward(x):
+ # return x * F.hardsigmoid(x) # for torchscript and CoreML
+ return x * F.hardtanh(x + 3, 0., 6.) / 6. # for torchscript, CoreML and ONNX
+
+
+class MemoryEfficientSwish(nn.Module):
+ class F(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x * torch.sigmoid(x)
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ return grad_output * (sx * (1 + x * (1 - sx)))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+# Mish https://github.com/digantamisra98/Mish --------------------------------------------------------------------------
+class Mish(nn.Module):
+ @staticmethod
+ def forward(x):
+ return x * F.softplus(x).tanh()
+
+
+class MemoryEfficientMish(nn.Module):
+ class F(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ fx = F.softplus(x).tanh()
+ return grad_output * (fx + x * sx * (1 - fx * fx))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+# FReLU https://arxiv.org/abs/2007.11824 -------------------------------------------------------------------------------
+class FReLU(nn.Module):
+ def __init__(self, c1, k=3): # ch_in, kernel
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
+ self.bn = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ return torch.max(x, self.bn(self.conv(x)))
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/add_nms.py b/oneAPI_ODAV_APP/ENGINES/utils/add_nms.py
new file mode 100644
index 000000000..30318d94e
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/add_nms.py
@@ -0,0 +1,156 @@
+import numpy as np
+import onnx
+from onnx import shape_inference
+try:
+ import onnx_graphsurgeon as gs
+except Exception as e:
+ print('Import onnx_graphsurgeon failure: %s' % e)
+
+import logging
+
+
+LOGGER = logging.getLogger(__name__)
+
+class RegisterNMS(object):
+ def __init__(
+ self,
+ onnx_model_path: str,
+ precision: str = "fp32",
+ ):
+
+ self.graph = gs.import_onnx(onnx.load(onnx_model_path))
+ assert self.graph
+ LOGGER.info("ONNX graph created successfully")
+ # Fold constants via ONNX-GS that PyTorch2ONNX may have missed
+ self.graph.fold_constants()
+ self.precision = precision
+ self.batch_size = 1
+ def infer(self):
+ """
+ Sanitize the graph by cleaning any unconnected nodes, do a topological resort,
+ and fold constant inputs values. When possible, run shape inference on the
+ ONNX graph to determine tensor shapes.
+ """
+ for _ in range(3):
+ count_before = len(self.graph.nodes)
+
+ self.graph.cleanup().toposort()
+ try:
+ for node in self.graph.nodes:
+ for o in node.outputs:
+ o.shape = None
+ model = gs.export_onnx(self.graph)
+ model = shape_inference.infer_shapes(model)
+ self.graph = gs.import_onnx(model)
+ except Exception as e:
+ LOGGER.info(f"Shape inference could not be performed at this time:\n{e}")
+ try:
+ self.graph.fold_constants(fold_shapes=True)
+ except TypeError as e:
+ LOGGER.error(
+ "This version of ONNX GraphSurgeon does not support folding shapes, "
+ f"please upgrade your onnx_graphsurgeon module. Error:\n{e}"
+ )
+ raise
+
+ count_after = len(self.graph.nodes)
+ if count_before == count_after:
+ # No new folding occurred in this iteration, so we can stop for now.
+ break
+
+ def save(self, output_path):
+ """
+ Save the ONNX model to the given location.
+ Args:
+ output_path: Path pointing to the location where to write
+ out the updated ONNX model.
+ """
+ self.graph.cleanup().toposort()
+ model = gs.export_onnx(self.graph)
+ onnx.save(model, output_path)
+ LOGGER.info(f"Saved ONNX model to {output_path}")
+
+ def register_nms(
+ self,
+ *,
+ score_thresh: float = 0.25,
+ nms_thresh: float = 0.45,
+ detections_per_img: int = 100,
+ ):
+ """
+ Register the ``EfficientNMS_TRT`` plugin node.
+ NMS expects these shapes for its input tensors:
+ - box_net: [batch_size, number_boxes, 4]
+ - class_net: [batch_size, number_boxes, number_labels]
+ Args:
+ score_thresh (float): The scalar threshold for score (low scoring boxes are removed).
+ nms_thresh (float): The scalar threshold for IOU (new boxes that have high IOU
+ overlap with previously selected boxes are removed).
+ detections_per_img (int): Number of best detections to keep after NMS.
+ """
+
+ self.infer()
+ # Find the concat node at the end of the network
+ op_inputs = self.graph.outputs
+ op = "EfficientNMS_TRT"
+ attrs = {
+ "plugin_version": "1",
+ "background_class": -1, # no background class
+ "max_output_boxes": detections_per_img,
+ "score_threshold": score_thresh,
+ "iou_threshold": nms_thresh,
+ "score_activation": False,
+ "box_coding": 0,
+ }
+
+ if self.precision == "fp32":
+ dtype_output = np.float32
+ elif self.precision == "fp16":
+ dtype_output = np.float16
+ else:
+ raise NotImplementedError(f"Currently not supports precision: {self.precision}")
+
+ # NMS Outputs
+ output_num_detections = gs.Variable(
+ name="num_dets",
+ dtype=np.int32,
+ shape=[self.batch_size, 1],
+ ) # A scalar indicating the number of valid detections per batch image.
+ output_boxes = gs.Variable(
+ name="det_boxes",
+ dtype=dtype_output,
+ shape=[self.batch_size, detections_per_img, 4],
+ )
+ output_scores = gs.Variable(
+ name="det_scores",
+ dtype=dtype_output,
+ shape=[self.batch_size, detections_per_img],
+ )
+ output_labels = gs.Variable(
+ name="det_classes",
+ dtype=np.int32,
+ shape=[self.batch_size, detections_per_img],
+ )
+
+ op_outputs = [output_num_detections, output_boxes, output_scores, output_labels]
+
+ # Create the NMS Plugin node with the selected inputs. The outputs of the node will also
+ # become the final outputs of the graph.
+ self.graph.layer(op=op, name="batched_nms", inputs=op_inputs, outputs=op_outputs, attrs=attrs)
+ LOGGER.info(f"Created NMS plugin '{op}' with attributes: {attrs}")
+
+ self.graph.outputs = op_outputs
+
+ self.infer()
+
+ def save(self, output_path):
+ """
+ Save the ONNX model to the given location.
+ Args:
+ output_path: Path pointing to the location where to write
+ out the updated ONNX model.
+ """
+ self.graph.cleanup().toposort()
+ model = gs.export_onnx(self.graph)
+ onnx.save(model, output_path)
+ LOGGER.info(f"Saved ONNX model to {output_path}")
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/autoanchor.py b/oneAPI_ODAV_APP/ENGINES/utils/autoanchor.py
new file mode 100644
index 000000000..2f4bb24ac
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/autoanchor.py
@@ -0,0 +1,161 @@
+# Auto-anchor utils
+
+import numpy as np
+import torch
+import yaml
+from scipy.cluster.vq import kmeans
+from tqdm import tqdm
+
+from utils.general import colorstr
+
+
+
+def check_anchor_order(m):
+ # Check anchor order against stride order for YOLO Detect() module m, and correct if necessary
+ a = m.anchor_grid.prod(-1).view(-1) # anchor area
+ da = a[-1] - a[0] # delta a
+ ds = m.stride[-1] - m.stride[0] # delta s
+ if da.sign() != ds.sign(): # same order
+ print('Reversing anchor order')
+ m.anchors[:] = m.anchors.flip(0)
+ m.anchor_grid[:] = m.anchor_grid.flip(0)
+
+
+def check_anchors(dataset, model, thr=4.0, imgsz=640):
+ # Check anchor fit to data, recompute if necessary
+ prefix = colorstr('autoanchor: ')
+ print(f'\n{prefix}Analyzing anchors... ', end='')
+ m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
+ shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
+ wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
+
+ def metric(k): # compute metric
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1. / r).min(2)[0] # ratio metric
+ best = x.max(1)[0] # best_x
+ aat = (x > 1. / thr).float().sum(1).mean() # anchors above threshold
+ bpr = (best > 1. / thr).float().mean() # best possible recall
+ return bpr, aat
+
+ anchors = m.anchor_grid.clone().cpu().view(-1, 2) # current anchors
+ bpr, aat = metric(anchors)
+ print(f'anchors/target = {aat:.2f}, Best Possible Recall (BPR) = {bpr:.4f}', end='')
+ if bpr < 0.98: # threshold to recompute
+ print('. Attempting to improve anchors, please wait...')
+ na = m.anchor_grid.numel() // 2 # number of anchors
+ try:
+ anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
+ except Exception as e:
+ print(f'{prefix}ERROR: {e}')
+ new_bpr = metric(anchors)[0]
+ if new_bpr > bpr: # replace anchors
+ anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
+ m.anchor_grid[:] = anchors.clone().view_as(m.anchor_grid) # for inference
+ check_anchor_order(m)
+ m.anchors[:] = anchors.clone().view_as(m.anchors) / m.stride.to(m.anchors.device).view(-1, 1, 1) # loss
+ print(f'{prefix}New anchors saved to model. Update model *.yaml to use these anchors in the future.')
+ else:
+ print(f'{prefix}Original anchors better than new anchors. Proceeding with original anchors.')
+ print('') # newline
+
+
+def kmean_anchors(path='./data/coco.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
+ """ Creates kmeans-evolved anchors from training dataset
+
+ Arguments:
+ path: path to dataset *.yaml, or a loaded dataset
+ n: number of anchors
+ img_size: image size used for training
+ thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
+ gen: generations to evolve anchors using genetic algorithm
+ verbose: print all results
+
+ Return:
+ k: kmeans evolved anchors
+
+ Usage:
+ from utils.autoanchor import *; _ = kmean_anchors()
+ """
+ thr = 1. / thr
+ prefix = colorstr('autoanchor: ')
+
+ def metric(k, wh): # compute metrics
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1. / r).min(2)[0] # ratio metric
+ # x = wh_iou(wh, torch.tensor(k)) # iou metric
+ return x, x.max(1)[0] # x, best_x
+
+ def anchor_fitness(k): # mutation fitness
+ _, best = metric(torch.tensor(k, dtype=torch.float32), wh)
+ return (best * (best > thr).float()).mean() # fitness
+
+ def print_results(k):
+ k = k[np.argsort(k.prod(1))] # sort small to large
+ x, best = metric(k, wh0)
+ bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
+ print(f'{prefix}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr')
+ print(f'{prefix}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, '
+ f'past_thr={x[x > thr].mean():.3f}-mean: ', end='')
+ for i, x in enumerate(k):
+ print('%i,%i' % (round(x[0]), round(x[1])), end=', ' if i < len(k) - 1 else '\n') # use in *.cfg
+ return k
+
+ if isinstance(path, str): # *.yaml file
+ with open(path) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # model dict
+ from utils.datasets import LoadImagesAndLabels
+ dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
+ else:
+ dataset = path # dataset
+
+ # Get label wh
+ shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
+
+ # Filter
+ i = (wh0 < 3.0).any(1).sum()
+ if i:
+ print(f'{prefix}WARNING: Extremely small objects found. {i} of {len(wh0)} labels are < 3 pixels in size.')
+ wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ # wh = wh * (np.random.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
+
+ # Kmeans calculation
+ print(f'{prefix}Running kmeans for {n} anchors on {len(wh)} points...')
+ s = wh.std(0) # sigmas for whitening
+ k, dist = kmeans(wh / s, n, iter=30) # points, mean distance
+ assert len(k) == n, print(f'{prefix}ERROR: scipy.cluster.vq.kmeans requested {n} points but returned only {len(k)}')
+ k *= s
+ wh = torch.tensor(wh, dtype=torch.float32) # filtered
+ wh0 = torch.tensor(wh0, dtype=torch.float32) # unfiltered
+ k = print_results(k)
+
+ # Plot
+ # k, d = [None] * 20, [None] * 20
+ # for i in tqdm(range(1, 21)):
+ # k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
+ # ax = ax.ravel()
+ # ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
+ # ax[0].hist(wh[wh[:, 0]<100, 0],400)
+ # ax[1].hist(wh[wh[:, 1]<100, 1],400)
+ # fig.savefig('wh.png', dpi=200)
+
+ # Evolve
+ npr = np.random
+ f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
+ pbar = tqdm(range(gen), desc=f'{prefix}Evolving anchors with Genetic Algorithm:') # progress bar
+ for _ in pbar:
+ v = np.ones(sh)
+ while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
+ v = ((npr.random(sh) < mp) * npr.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
+ kg = (k.copy() * v).clip(min=2.0)
+ fg = anchor_fitness(kg)
+ if fg > f:
+ f, k = fg, kg.copy()
+ pbar.desc = f'{prefix}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
+ if verbose:
+ print_results(k)
+
+ return print_results(k)
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/aws/__init__.py b/oneAPI_ODAV_APP/ENGINES/utils/aws/__init__.py
new file mode 100644
index 000000000..e2cbd5382
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/aws/__init__.py
@@ -0,0 +1 @@
+#init
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/aws/mime.sh b/oneAPI_ODAV_APP/ENGINES/utils/aws/mime.sh
new file mode 100644
index 000000000..cd595644c
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/aws/mime.sh
@@ -0,0 +1,27 @@
+# AWS EC2 instance startup 'MIME' script https://aws.amazon.com/premiumsupport/knowledge-center/execute-user-data-ec2/
+# This script will run on every instance restart, not only on first start
+# --- DO NOT COPY ABOVE COMMENTS WHEN PASTING INTO USERDATA ---
+
+
+Content-Type: multipart/mixed; boundary="//"
+MIME-Version: 1.0
+
+--//
+Content-Type: text/cloud-config; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="cloud-config.txt"
+
+#cloud-config
+cloud_final_modules:
+- [scripts-user, always]
+
+--//
+Content-Type: text/x-shellscript; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="userdata.txt"
+
+#!/bin/bash
+# --- paste contents of userdata.sh here ---
+--//
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/aws/resume.py b/oneAPI_ODAV_APP/ENGINES/utils/aws/resume.py
new file mode 100644
index 000000000..ce7dcde6f
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/aws/resume.py
@@ -0,0 +1,38 @@
+# Resume all interrupted trainings in yolor/ dir including DDP trainings
+# Usage: $ python utils/aws/resume.py
+
+import os
+import sys
+from pathlib import Path
+
+import torch
+import yaml
+
+
+sys.path.append('./') # to run '$ python *.py' files in subdirectories
+
+port = 0 # --master_port
+path = Path('').resolve()
+for last in path.rglob('*/**/last.pt'):
+ ckpt = torch.load(last)
+ if ckpt['optimizer'] is None:
+ continue
+
+ # Load opt.yaml
+ with open(last.parent.parent / 'opt.yaml') as f:
+ opt = yaml.load(f, Loader=yaml.SafeLoader)
+
+ # Get device count
+ d = opt['device'].split(',') # devices
+ nd = len(d) # number of devices
+ ddp = nd > 1 or (nd == 0 and torch.cuda.device_count() > 1) # distributed data parallel
+
+ if ddp: # multi-GPU
+ port += 1
+ cmd = f'python -m torch.distributed.launch --nproc_per_node {nd} --master_port {port} train.py --resume {last}'
+ else: # single-GPU
+ cmd = f'python train.py --resume {last}'
+
+ cmd += ' > /dev/null 2>&1 &' # redirect output to dev/null and run in daemon thread
+ print(cmd)
+ os.system(cmd)
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/aws/userdata.sh b/oneAPI_ODAV_APP/ENGINES/utils/aws/userdata.sh
new file mode 100644
index 000000000..da731b9f5
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/aws/userdata.sh
@@ -0,0 +1,28 @@
+#!/bin/bash
+# AWS EC2 instance startup script https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/user-data.html
+# This script will run only once on first instance start (for a re-start script see mime.sh)
+# /home/ubuntu (ubuntu) or /home/ec2-user (amazon-linux) is working dir
+# Use >300 GB SSD
+
+
+cd home/ubuntu
+if [ ! -d yolor ]; then
+ echo "Running first-time script." # install dependencies, download COCO, pull Docker
+ git clone -b main https://github.com/WongKinYiu/yolov7 && sudo chmod -R 777 yolov7
+ cd yolov7
+ bash data/scripts/get_coco.sh && echo "Data done." &
+ sudo docker pull nvcr.io/nvidia/pytorch:21.08-py3 && echo "Docker done." &
+ python -m pip install --upgrade pip && pip install -r requirements.txt && python detect.py && echo "Requirements done." &
+ wait && echo "All tasks done." # finish background tasks
+else
+ echo "Running re-start script." # resume interrupted runs
+ i=0
+ list=$(sudo docker ps -qa) # container list i.e. $'one\ntwo\nthree\nfour'
+ while IFS= read -r id; do
+ ((i++))
+ echo "restarting container $i: $id"
+ sudo docker start $id
+ # sudo docker exec -it $id python train.py --resume # single-GPU
+ sudo docker exec -d $id python utils/aws/resume.py # multi-scenario
+ done <<<"$list"
+fi
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/datasets.py b/oneAPI_ODAV_APP/ENGINES/utils/datasets.py
new file mode 100644
index 000000000..d471515ec
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/datasets.py
@@ -0,0 +1,1321 @@
+# Dataset utils and dataloaders
+
+import glob
+import logging
+import math
+import os
+import random
+import shutil
+import time
+from itertools import repeat
+from multiprocessing.pool import ThreadPool
+from pathlib import Path
+from threading import Thread
+
+import cv2
+import numpy as np
+import torch
+import torch.nn.functional as F
+from PIL import Image, ExifTags
+from torch.utils.data import Dataset
+from tqdm import tqdm
+
+import pickle
+from copy import deepcopy
+#from pycocotools import mask as maskUtils
+from torchvision.utils import save_image
+from torchvision.ops import roi_pool, roi_align, ps_roi_pool, ps_roi_align
+
+from utils.general import check_requirements, xyxy2xywh, xywh2xyxy, xywhn2xyxy, xyn2xy, segment2box, segments2boxes, \
+ resample_segments, clean_str
+from utils.torch_utils import torch_distributed_zero_first
+
+
+# Parameters
+help_url = 'https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
+img_formats = ['bmp', 'jpg', 'jpeg', 'png', 'tif', 'tiff', 'dng', 'webp', 'mpo'] # acceptable image suffixes
+vid_formats = ['mov', 'avi', 'mp4', 'mpg', 'mpeg', 'm4v', 'wmv', 'mkv'] # acceptable video suffixes
+logger = logging.getLogger(__name__)
+
+# Get orientation exif tag
+for orientation in ExifTags.TAGS.keys():
+ if ExifTags.TAGS[orientation] == 'Orientation':
+ break
+
+
+def get_hash(files):
+ # Returns a single hash value of a list of files
+ return sum(os.path.getsize(f) for f in files if os.path.isfile(f))
+
+
+def exif_size(img):
+ # Returns exif-corrected PIL size
+ s = img.size # (width, height)
+ try:
+ rotation = dict(img._getexif().items())[orientation]
+ if rotation == 6: # rotation 270
+ s = (s[1], s[0])
+ elif rotation == 8: # rotation 90
+ s = (s[1], s[0])
+ except:
+ pass
+
+ return s
+
+
+def create_dataloader(path, imgsz, batch_size, stride, opt, hyp=None, augment=False, cache=False, pad=0.0, rect=False,
+ rank=-1, world_size=1, workers=8, image_weights=False, quad=False, prefix=''):
+ # Make sure only the first process in DDP process the dataset first, and the following others can use the cache
+ with torch_distributed_zero_first(rank):
+ dataset = LoadImagesAndLabels(path, imgsz, batch_size,
+ augment=augment, # augment images
+ hyp=hyp, # augmentation hyperparameters
+ rect=rect, # rectangular training
+ cache_images=cache,
+ single_cls=opt.single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix)
+
+ batch_size = min(batch_size, len(dataset))
+ nw = min([os.cpu_count() // world_size, batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = torch.utils.data.distributed.DistributedSampler(dataset) if rank != -1 else None
+ loader = torch.utils.data.DataLoader if image_weights else InfiniteDataLoader
+ # Use torch.utils.data.DataLoader() if dataset.properties will update during training else InfiniteDataLoader()
+ dataloader = loader(dataset,
+ batch_size=batch_size,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn)
+ return dataloader, dataset
+
+
+class InfiniteDataLoader(torch.utils.data.dataloader.DataLoader):
+ """ Dataloader that reuses workers
+
+ Uses same syntax as vanilla DataLoader
+ """
+
+ def __init__(self, *args, **kwargs):
+ super().__init__(*args, **kwargs)
+ object.__setattr__(self, 'batch_sampler', _RepeatSampler(self.batch_sampler))
+ self.iterator = super().__iter__()
+
+ def __len__(self):
+ return len(self.batch_sampler.sampler)
+
+ def __iter__(self):
+ for i in range(len(self)):
+ yield next(self.iterator)
+
+
+class _RepeatSampler(object):
+ """ Sampler that repeats forever
+
+ Args:
+ sampler (Sampler)
+ """
+
+ def __init__(self, sampler):
+ self.sampler = sampler
+
+ def __iter__(self):
+ while True:
+ yield from iter(self.sampler)
+
+
+class LoadImages: # for inference
+ def __init__(self, path, img_size=640, stride=32):
+ p = str(Path(path).absolute()) # os-agnostic absolute path
+ if '*' in p:
+ files = sorted(glob.glob(p, recursive=True)) # glob
+ elif os.path.isdir(p):
+ files = sorted(glob.glob(os.path.join(p, '*.*'))) # dir
+ elif os.path.isfile(p):
+ files = [p] # files
+ else:
+ raise Exception(f'ERROR: {p} does not exist')
+
+ images = [x for x in files if x.split('.')[-1].lower() in img_formats]
+ videos = [x for x in files if x.split('.')[-1].lower() in vid_formats]
+ ni, nv = len(images), len(videos)
+
+ self.img_size = img_size
+ self.stride = stride
+ self.files = images + videos
+ self.nf = ni + nv # number of files
+ self.video_flag = [False] * ni + [True] * nv
+ self.mode = 'image'
+ if any(videos):
+ self.new_video(videos[0]) # new video
+ else:
+ self.cap = None
+ assert self.nf > 0, f'No images or videos found in {p}. ' \
+ f'Supported formats are:\nimages: {img_formats}\nvideos: {vid_formats}'
+
+ def __iter__(self):
+ self.count = 0
+ return self
+
+ def __next__(self):
+ if self.count == self.nf:
+ raise StopIteration
+ path = self.files[self.count]
+
+ if self.video_flag[self.count]:
+ # Read video
+ self.mode = 'video'
+ ret_val, img0 = self.cap.read()
+ if not ret_val:
+ self.count += 1
+ self.cap.release()
+ if self.count == self.nf: # last video
+ raise StopIteration
+ else:
+ path = self.files[self.count]
+ self.new_video(path)
+ ret_val, img0 = self.cap.read()
+
+ self.frame += 1
+ print(f'video {self.count + 1}/{self.nf} ({self.frame}/{self.nframes}) {path}: ', end='')
+
+ else:
+ # Read image
+ self.count += 1
+ img0 = cv2.imread(path) # BGR
+ assert img0 is not None, 'Image Not Found ' + path
+ #print(f'image {self.count}/{self.nf} {path}: ', end='')
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return path, img, img0, self.cap
+
+ def new_video(self, path):
+ self.frame = 0
+ self.cap = cv2.VideoCapture(path)
+ self.nframes = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
+
+ def __len__(self):
+ return self.nf # number of files
+
+
+class LoadWebcam: # for inference
+ def __init__(self, pipe='0', img_size=640, stride=32):
+ self.img_size = img_size
+ self.stride = stride
+
+ if pipe.isnumeric():
+ pipe = eval(pipe) # local camera
+ # pipe = 'rtsp://192.168.1.64/1' # IP camera
+ # pipe = 'rtsp://username:password@192.168.1.64/1' # IP camera with login
+ # pipe = 'http://wmccpinetop.axiscam.net/mjpg/video.mjpg' # IP golf camera
+
+ self.pipe = pipe
+ self.cap = cv2.VideoCapture(pipe) # video capture object
+ self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ self.cap.release()
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Read frame
+ if self.pipe == 0: # local camera
+ ret_val, img0 = self.cap.read()
+ img0 = cv2.flip(img0, 1) # flip left-right
+ else: # IP camera
+ n = 0
+ while True:
+ n += 1
+ self.cap.grab()
+ if n % 30 == 0: # skip frames
+ ret_val, img0 = self.cap.retrieve()
+ if ret_val:
+ break
+
+ # Print
+ assert ret_val, f'Camera Error {self.pipe}'
+ img_path = 'webcam.jpg'
+ print(f'webcam {self.count}: ', end='')
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return img_path, img, img0, None
+
+ def __len__(self):
+ return 0
+
+
+class LoadStreams: # multiple IP or RTSP cameras
+ def __init__(self, sources='streams.txt', img_size=640, stride=32):
+ self.mode = 'stream'
+ self.img_size = img_size
+ self.stride = stride
+
+ if os.path.isfile(sources):
+ with open(sources, 'r') as f:
+ sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
+ else:
+ sources = [sources]
+
+ n = len(sources)
+ self.imgs = [None] * n
+ self.sources = [clean_str(x) for x in sources] # clean source names for later
+ for i, s in enumerate(sources):
+ # Start the thread to read frames from the video stream
+ print(f'{i + 1}/{n}: {s}... ', end='')
+ url = eval(s) if s.isnumeric() else s
+ if 'youtube.com/' in str(url) or 'youtu.be/' in str(url): # if source is YouTube video
+ check_requirements(('pafy', 'youtube_dl'))
+ import pafy
+ url = pafy.new(url).getbest(preftype="mp4").url
+ cap = cv2.VideoCapture(url)
+ assert cap.isOpened(), f'Failed to open {s}'
+ w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ self.fps = cap.get(cv2.CAP_PROP_FPS) % 100
+
+ _, self.imgs[i] = cap.read() # guarantee first frame
+ thread = Thread(target=self.update, args=([i, cap]), daemon=True)
+ print(f' success ({w}x{h} at {self.fps:.2f} FPS).')
+ thread.start()
+ print('') # newline
+
+ # check for common shapes
+ s = np.stack([letterbox(x, self.img_size, stride=self.stride)[0].shape for x in self.imgs], 0) # shapes
+ self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
+ if not self.rect:
+ print('WARNING: Different stream shapes detected. For optimal performance supply similarly-shaped streams.')
+
+ def update(self, index, cap):
+ # Read next stream frame in a daemon thread
+ n = 0
+ while cap.isOpened():
+ n += 1
+ # _, self.imgs[index] = cap.read()
+ cap.grab()
+ if n == 4: # read every 4th frame
+ success, im = cap.retrieve()
+ self.imgs[index] = im if success else self.imgs[index] * 0
+ n = 0
+ time.sleep(1 / self.fps) # wait time
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ img0 = self.imgs.copy()
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Letterbox
+ img = [letterbox(x, self.img_size, auto=self.rect, stride=self.stride)[0] for x in img0]
+
+ # Stack
+ img = np.stack(img, 0)
+
+ # Convert
+ img = img[:, :, :, ::-1].transpose(0, 3, 1, 2) # BGR to RGB, to bsx3x416x416
+ img = np.ascontiguousarray(img)
+
+ return self.sources, img, img0, None
+
+ def __len__(self):
+ return 0 # 1E12 frames = 32 streams at 30 FPS for 30 years
+
+
+def img2label_paths(img_paths):
+ # Define label paths as a function of image paths
+ sa, sb = os.sep + 'images' + os.sep, os.sep + 'labels' + os.sep # /images/, /labels/ substrings
+ return ['txt'.join(x.replace(sa, sb, 1).rsplit(x.split('.')[-1], 1)) for x in img_paths]
+
+
+class LoadImagesAndLabels(Dataset): # for training/testing
+ def __init__(self, path, img_size=640, batch_size=16, augment=False, hyp=None, rect=False, image_weights=False,
+ cache_images=False, single_cls=False, stride=32, pad=0.0, prefix=''):
+ self.img_size = img_size
+ self.augment = augment
+ self.hyp = hyp
+ self.image_weights = image_weights
+ self.rect = False if image_weights else rect
+ self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
+ self.mosaic_border = [-img_size // 2, -img_size // 2]
+ self.stride = stride
+ self.path = path
+ #self.albumentations = Albumentations() if augment else None
+
+ try:
+ f = [] # image files
+ for p in path if isinstance(path, list) else [path]:
+ p = Path(p) # os-agnostic
+ if p.is_dir(): # dir
+ f += glob.glob(str(p / '**' / '*.*'), recursive=True)
+ # f = list(p.rglob('**/*.*')) # pathlib
+ elif p.is_file(): # file
+ with open(p, 'r') as t:
+ t = t.read().strip().splitlines()
+ parent = str(p.parent) + os.sep
+ f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
+ # f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
+ else:
+ raise Exception(f'{prefix}{p} does not exist')
+ self.img_files = sorted([x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in img_formats])
+ # self.img_files = sorted([x for x in f if x.suffix[1:].lower() in img_formats]) # pathlib
+ assert self.img_files, f'{prefix}No images found'
+ except Exception as e:
+ raise Exception(f'{prefix}Error loading data from {path}: {e}\nSee {help_url}')
+
+ # Check cache
+ self.label_files = img2label_paths(self.img_files) # labels
+ cache_path = (p if p.is_file() else Path(self.label_files[0]).parent).with_suffix('.cache') # cached labels
+ if cache_path.is_file():
+ cache, exists = torch.load(cache_path), True # load
+ #if cache['hash'] != get_hash(self.label_files + self.img_files) or 'version' not in cache: # changed
+ # cache, exists = self.cache_labels(cache_path, prefix), False # re-cache
+ else:
+ cache, exists = self.cache_labels(cache_path, prefix), False # cache
+
+ # Display cache
+ nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupted, total
+ if exists:
+ d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupted"
+ tqdm(None, desc=prefix + d, total=n, initial=n) # display cache results
+ assert nf > 0 or not augment, f'{prefix}No labels in {cache_path}. Can not train without labels. See {help_url}'
+
+ # Read cache
+ cache.pop('hash') # remove hash
+ cache.pop('version') # remove version
+ labels, shapes, self.segments = zip(*cache.values())
+ self.labels = list(labels)
+ self.shapes = np.array(shapes, dtype=np.float64)
+ self.img_files = list(cache.keys()) # update
+ self.label_files = img2label_paths(cache.keys()) # update
+ if single_cls:
+ for x in self.labels:
+ x[:, 0] = 0
+
+ n = len(shapes) # number of images
+ bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
+ nb = bi[-1] + 1 # number of batches
+ self.batch = bi # batch index of image
+ self.n = n
+ self.indices = range(n)
+
+ # Rectangular Training
+ if self.rect:
+ # Sort by aspect ratio
+ s = self.shapes # wh
+ ar = s[:, 1] / s[:, 0] # aspect ratio
+ irect = ar.argsort()
+ self.img_files = [self.img_files[i] for i in irect]
+ self.label_files = [self.label_files[i] for i in irect]
+ self.labels = [self.labels[i] for i in irect]
+ self.shapes = s[irect] # wh
+ ar = ar[irect]
+
+ # Set training image shapes
+ shapes = [[1, 1]] * nb
+ for i in range(nb):
+ ari = ar[bi == i]
+ mini, maxi = ari.min(), ari.max()
+ if maxi < 1:
+ shapes[i] = [maxi, 1]
+ elif mini > 1:
+ shapes[i] = [1, 1 / mini]
+
+ self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(np.int) * stride
+
+ # Cache images into memory for faster training (WARNING: large datasets may exceed system RAM)
+ self.imgs = [None] * n
+ if cache_images:
+ if cache_images == 'disk':
+ self.im_cache_dir = Path(Path(self.img_files[0]).parent.as_posix() + '_npy')
+ self.img_npy = [self.im_cache_dir / Path(f).with_suffix('.npy').name for f in self.img_files]
+ self.im_cache_dir.mkdir(parents=True, exist_ok=True)
+ gb = 0 # Gigabytes of cached images
+ self.img_hw0, self.img_hw = [None] * n, [None] * n
+ results = ThreadPool(8).imap(lambda x: load_image(*x), zip(repeat(self), range(n)))
+ pbar = tqdm(enumerate(results), total=n)
+ for i, x in pbar:
+ if cache_images == 'disk':
+ if not self.img_npy[i].exists():
+ np.save(self.img_npy[i].as_posix(), x[0])
+ gb += self.img_npy[i].stat().st_size
+ else:
+ self.imgs[i], self.img_hw0[i], self.img_hw[i] = x
+ gb += self.imgs[i].nbytes
+ pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB)'
+ pbar.close()
+
+ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
+ # Cache dataset labels, check images and read shapes
+ x = {} # dict
+ nm, nf, ne, nc = 0, 0, 0, 0 # number missing, found, empty, duplicate
+ pbar = tqdm(zip(self.img_files, self.label_files), desc='Scanning images', total=len(self.img_files))
+ for i, (im_file, lb_file) in enumerate(pbar):
+ try:
+ # verify images
+ im = Image.open(im_file)
+ im.verify() # PIL verify
+ shape = exif_size(im) # image size
+ segments = [] # instance segments
+ assert (shape[0] > 9) & (shape[1] > 9), f'image size {shape} <10 pixels'
+ assert im.format.lower() in img_formats, f'invalid image format {im.format}'
+
+ # verify labels
+ if os.path.isfile(lb_file):
+ nf += 1 # label found
+ with open(lb_file, 'r') as f:
+ l = [x.split() for x in f.read().strip().splitlines()]
+ if any([len(x) > 8 for x in l]): # is segment
+ classes = np.array([x[0] for x in l], dtype=np.float32)
+ segments = [np.array(x[1:], dtype=np.float32).reshape(-1, 2) for x in l] # (cls, xy1...)
+ l = np.concatenate((classes.reshape(-1, 1), segments2boxes(segments)), 1) # (cls, xywh)
+ l = np.array(l, dtype=np.float32)
+ if len(l):
+ assert l.shape[1] == 5, 'labels require 5 columns each'
+ assert (l >= 0).all(), 'negative labels'
+ assert (l[:, 1:] <= 1).all(), 'non-normalized or out of bounds coordinate labels'
+ assert np.unique(l, axis=0).shape[0] == l.shape[0], 'duplicate labels'
+ else:
+ ne += 1 # label empty
+ l = np.zeros((0, 5), dtype=np.float32)
+ else:
+ nm += 1 # label missing
+ l = np.zeros((0, 5), dtype=np.float32)
+ x[im_file] = [l, shape, segments]
+ except Exception as e:
+ nc += 1
+ print(f'{prefix}WARNING: Ignoring corrupted image and/or label {im_file}: {e}')
+
+ pbar.desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels... " \
+ f"{nf} found, {nm} missing, {ne} empty, {nc} corrupted"
+ pbar.close()
+
+ if nf == 0:
+ print(f'{prefix}WARNING: No labels found in {path}. See {help_url}')
+
+ x['hash'] = get_hash(self.label_files + self.img_files)
+ x['results'] = nf, nm, ne, nc, i + 1
+ x['version'] = 0.1 # cache version
+ torch.save(x, path) # save for next time
+ logging.info(f'{prefix}New cache created: {path}')
+ return x
+
+ def __len__(self):
+ return len(self.img_files)
+
+ # def __iter__(self):
+ # self.count = -1
+ # print('ran dataset iter')
+ # #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
+ # return self
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ if mosaic:
+ # Load mosaic
+ if random.random() < 0.8:
+ img, labels = load_mosaic(self, index)
+ else:
+ img, labels = load_mosaic9(self, index)
+ shapes = None
+
+ # MixUp https://arxiv.org/pdf/1710.09412.pdf
+ if random.random() < hyp['mixup']:
+ if random.random() < 0.8:
+ img2, labels2 = load_mosaic(self, random.randint(0, len(self.labels) - 1))
+ else:
+ img2, labels2 = load_mosaic9(self, random.randint(0, len(self.labels) - 1))
+ r = np.random.beta(8.0, 8.0) # mixup ratio, alpha=beta=8.0
+ img = (img * r + img2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = load_image(self, index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ # Augment imagespace
+ if not mosaic:
+ img, labels = random_perspective(img, labels,
+ degrees=hyp['degrees'],
+ translate=hyp['translate'],
+ scale=hyp['scale'],
+ shear=hyp['shear'],
+ perspective=hyp['perspective'])
+
+
+ #img, labels = self.albumentations(img, labels)
+
+ # Augment colorspace
+ augment_hsv(img, hgain=hyp['hsv_h'], sgain=hyp['hsv_s'], vgain=hyp['hsv_v'])
+
+ # Apply cutouts
+ # if random.random() < 0.9:
+ # labels = cutout(img, labels)
+
+ if random.random() < hyp['paste_in']:
+ sample_labels, sample_images, sample_masks = [], [], []
+ while len(sample_labels) < 30:
+ sample_labels_, sample_images_, sample_masks_ = load_samples(self, random.randint(0, len(self.labels) - 1))
+ sample_labels += sample_labels_
+ sample_images += sample_images_
+ sample_masks += sample_masks_
+ #print(len(sample_labels))
+ if len(sample_labels) == 0:
+ break
+ labels = pastein(img, labels, sample_labels, sample_images, sample_masks)
+
+ nL = len(labels) # number of labels
+ if nL:
+ labels[:, 1:5] = xyxy2xywh(labels[:, 1:5]) # convert xyxy to xywh
+ labels[:, [2, 4]] /= img.shape[0] # normalized height 0-1
+ labels[:, [1, 3]] /= img.shape[1] # normalized width 0-1
+
+ if self.augment:
+ # flip up-down
+ if random.random() < hyp['flipud']:
+ img = np.flipud(img)
+ if nL:
+ labels[:, 2] = 1 - labels[:, 2]
+
+ # flip left-right
+ if random.random() < hyp['fliplr']:
+ img = np.fliplr(img)
+ if nL:
+ labels[:, 1] = 1 - labels[:, 1]
+
+ labels_out = torch.zeros((nL, 6))
+ if nL:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return torch.from_numpy(img), labels_out, self.img_files[index], shapes
+
+ @staticmethod
+ def collate_fn(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ for i, l in enumerate(label):
+ l[:, 0] = i # add target image index for build_targets()
+ return torch.stack(img, 0), torch.cat(label, 0), path, shapes
+
+ @staticmethod
+ def collate_fn4(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ n = len(shapes) // 4
+ img4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
+
+ ho = torch.tensor([[0., 0, 0, 1, 0, 0]])
+ wo = torch.tensor([[0., 0, 1, 0, 0, 0]])
+ s = torch.tensor([[1, 1, .5, .5, .5, .5]]) # scale
+ for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
+ i *= 4
+ if random.random() < 0.5:
+ im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2., mode='bilinear', align_corners=False)[
+ 0].type(img[i].type())
+ l = label[i]
+ else:
+ im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
+ l = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
+ img4.append(im)
+ label4.append(l)
+
+ for i, l in enumerate(label4):
+ l[:, 0] = i # add target image index for build_targets()
+
+ return torch.stack(img4, 0), torch.cat(label4, 0), path4, shapes4
+
+
+# Ancillary functions --------------------------------------------------------------------------------------------------
+def load_image(self, index):
+ # loads 1 image from dataset, returns img, original hw, resized hw
+ img = self.imgs[index]
+ if img is None: # not cached
+ path = self.img_files[index]
+ img = cv2.imread(path) # BGR
+ assert img is not None, 'Image Not Found ' + path
+ h0, w0 = img.shape[:2] # orig hw
+ r = self.img_size / max(h0, w0) # resize image to img_size
+ if r != 1: # always resize down, only resize up if training with augmentation
+ interp = cv2.INTER_AREA if r < 1 and not self.augment else cv2.INTER_LINEAR
+ img = cv2.resize(img, (int(w0 * r), int(h0 * r)), interpolation=interp)
+ return img, (h0, w0), img.shape[:2] # img, hw_original, hw_resized
+ else:
+ return self.imgs[index], self.img_hw0[index], self.img_hw[index] # img, hw_original, hw_resized
+
+
+def augment_hsv(img, hgain=0.5, sgain=0.5, vgain=0.5):
+ r = np.random.uniform(-1, 1, 3) * [hgain, sgain, vgain] + 1 # random gains
+ hue, sat, val = cv2.split(cv2.cvtColor(img, cv2.COLOR_BGR2HSV))
+ dtype = img.dtype # uint8
+
+ x = np.arange(0, 256, dtype=np.int16)
+ lut_hue = ((x * r[0]) % 180).astype(dtype)
+ lut_sat = np.clip(x * r[1], 0, 255).astype(dtype)
+ lut_val = np.clip(x * r[2], 0, 255).astype(dtype)
+
+ img_hsv = cv2.merge((cv2.LUT(hue, lut_hue), cv2.LUT(sat, lut_sat), cv2.LUT(val, lut_val))).astype(dtype)
+ cv2.cvtColor(img_hsv, cv2.COLOR_HSV2BGR, dst=img) # no return needed
+
+
+def hist_equalize(img, clahe=True, bgr=False):
+ # Equalize histogram on BGR image 'img' with img.shape(n,m,3) and range 0-255
+ yuv = cv2.cvtColor(img, cv2.COLOR_BGR2YUV if bgr else cv2.COLOR_RGB2YUV)
+ if clahe:
+ c = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
+ yuv[:, :, 0] = c.apply(yuv[:, :, 0])
+ else:
+ yuv[:, :, 0] = cv2.equalizeHist(yuv[:, :, 0]) # equalize Y channel histogram
+ return cv2.cvtColor(yuv, cv2.COLOR_YUV2BGR if bgr else cv2.COLOR_YUV2RGB) # convert YUV image to RGB
+
+
+def load_mosaic(self, index):
+ # loads images in a 4-mosaic
+
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ #img4, labels4, segments4 = remove_background(img4, labels4, segments4)
+ #sample_segments(img4, labels4, segments4, probability=self.hyp['copy_paste'])
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, probability=self.hyp['copy_paste'])
+ img4, labels4 = random_perspective(img4, labels4, segments4,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img4, labels4
+
+
+def load_mosaic9(self, index):
+ # loads images in a 9-mosaic
+
+ labels9, segments9 = [], []
+ s = self.img_size
+ indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img9
+ if i == 0: # center
+ img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ h0, w0 = h, w
+ c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
+ elif i == 1: # top
+ c = s, s - h, s + w, s
+ elif i == 2: # top right
+ c = s + wp, s - h, s + wp + w, s
+ elif i == 3: # right
+ c = s + w0, s, s + w0 + w, s + h
+ elif i == 4: # bottom right
+ c = s + w0, s + hp, s + w0 + w, s + hp + h
+ elif i == 5: # bottom
+ c = s + w0 - w, s + h0, s + w0, s + h0 + h
+ elif i == 6: # bottom left
+ c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
+ elif i == 7: # left
+ c = s - w, s + h0 - h, s, s + h0
+ elif i == 8: # top left
+ c = s - w, s + h0 - hp - h, s, s + h0 - hp
+
+ padx, pady = c[:2]
+ x1, y1, x2, y2 = [max(x, 0) for x in c] # allocate coords
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
+ labels9.append(labels)
+ segments9.extend(segments)
+
+ # Image
+ img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
+ hp, wp = h, w # height, width previous
+
+ # Offset
+ yc, xc = [int(random.uniform(0, s)) for _ in self.mosaic_border] # mosaic center x, y
+ img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
+
+ # Concat/clip labels
+ labels9 = np.concatenate(labels9, 0)
+ labels9[:, [1, 3]] -= xc
+ labels9[:, [2, 4]] -= yc
+ c = np.array([xc, yc]) # centers
+ segments9 = [x - c for x in segments9]
+
+ for x in (labels9[:, 1:], *segments9):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img9, labels9 = replicate(img9, labels9) # replicate
+
+ # Augment
+ #img9, labels9, segments9 = remove_background(img9, labels9, segments9)
+ img9, labels9, segments9 = copy_paste(img9, labels9, segments9, probability=self.hyp['copy_paste'])
+ img9, labels9 = random_perspective(img9, labels9, segments9,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img9, labels9
+
+
+def load_samples(self, index):
+ # loads images in a 4-mosaic
+
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ #img4, labels4, segments4 = remove_background(img4, labels4, segments4)
+ sample_labels, sample_images, sample_masks = sample_segments(img4, labels4, segments4, probability=0.5)
+
+ return sample_labels, sample_images, sample_masks
+
+
+def copy_paste(img, labels, segments, probability=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ if probability and n:
+ h, w, c = img.shape # height, width, channels
+ im_new = np.zeros(img.shape, np.uint8)
+ for j in random.sample(range(n), k=round(probability * n)):
+ l, s = labels[j], segments[j]
+ box = w - l[3], l[2], w - l[1], l[4]
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
+ labels = np.concatenate((labels, [[l[0], *box]]), 0)
+ segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=img, src2=im_new)
+ result = cv2.flip(result, 1) # augment segments (flip left-right)
+ i = result > 0 # pixels to replace
+ # i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
+ img[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+
+ return img, labels, segments
+
+
+def remove_background(img, labels, segments):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ h, w, c = img.shape # height, width, channels
+ im_new = np.zeros(img.shape, np.uint8)
+ img_new = np.ones(img.shape, np.uint8) * 114
+ for j in range(n):
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=img, src2=im_new)
+
+ i = result > 0 # pixels to replace
+ img_new[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+
+ return img_new, labels, segments
+
+
+def sample_segments(img, labels, segments, probability=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ sample_labels = []
+ sample_images = []
+ sample_masks = []
+ if probability and n:
+ h, w, c = img.shape # height, width, channels
+ for j in random.sample(range(n), k=round(probability * n)):
+ l, s = labels[j], segments[j]
+ box = l[1].astype(int).clip(0,w-1), l[2].astype(int).clip(0,h-1), l[3].astype(int).clip(0,w-1), l[4].astype(int).clip(0,h-1)
+
+ #print(box)
+ if (box[2] <= box[0]) or (box[3] <= box[1]):
+ continue
+
+ sample_labels.append(l[0])
+
+ mask = np.zeros(img.shape, np.uint8)
+
+ cv2.drawContours(mask, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+ sample_masks.append(mask[box[1]:box[3],box[0]:box[2],:])
+
+ result = cv2.bitwise_and(src1=img, src2=mask)
+ i = result > 0 # pixels to replace
+ mask[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+ #print(box)
+ sample_images.append(mask[box[1]:box[3],box[0]:box[2],:])
+
+ return sample_labels, sample_images, sample_masks
+
+
+def replicate(img, labels):
+ # Replicate labels
+ h, w = img.shape[:2]
+ boxes = labels[:, 1:].astype(int)
+ x1, y1, x2, y2 = boxes.T
+ s = ((x2 - x1) + (y2 - y1)) / 2 # side length (pixels)
+ for i in s.argsort()[:round(s.size * 0.5)]: # smallest indices
+ x1b, y1b, x2b, y2b = boxes[i]
+ bh, bw = y2b - y1b, x2b - x1b
+ yc, xc = int(random.uniform(0, h - bh)), int(random.uniform(0, w - bw)) # offset x, y
+ x1a, y1a, x2a, y2a = [xc, yc, xc + bw, yc + bh]
+ img[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ labels = np.append(labels, [[labels[i, 0], x1a, y1a, x2a, y2a]], axis=0)
+
+ return img, labels
+
+
+def letterbox(img, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
+ # Resize and pad image while meeting stride-multiple constraints
+ shape = img.shape[:2] # current shape [height, width]
+ if isinstance(new_shape, int):
+ new_shape = (new_shape, new_shape)
+
+ # Scale ratio (new / old)
+ r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
+ if not scaleup: # only scale down, do not scale up (for better test mAP)
+ r = min(r, 1.0)
+
+ # Compute padding
+ ratio = r, r # width, height ratios
+ new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
+ dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
+ if auto: # minimum rectangle
+ dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
+ elif scaleFill: # stretch
+ dw, dh = 0.0, 0.0
+ new_unpad = (new_shape[1], new_shape[0])
+ ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
+
+ dw /= 2 # divide padding into 2 sides
+ dh /= 2
+
+ if shape[::-1] != new_unpad: # resize
+ img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
+ top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
+ left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
+ img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
+ return img, ratio, (dw, dh)
+
+
+def random_perspective(img, targets=(), segments=(), degrees=10, translate=.1, scale=.1, shear=10, perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = img.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = img.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -img.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -img.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1.1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
+ T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ img = cv2.warpPerspective(img, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ img = cv2.warpAffine(img, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(img[:, :, ::-1]) # base
+ # ax[1].imshow(img2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ if n:
+ use_segments = any(x.any() for x in segments)
+ new = np.zeros((n, 4))
+ if use_segments: # warp segments
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+
+ else: # warp boxes
+ xy = np.ones((n * 4, 3))
+ xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
+
+ # create new boxes
+ x = xy[:, [0, 2, 4, 6]]
+ y = xy[:, [1, 3, 5, 7]]
+ new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
+
+ # clip
+ new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
+ new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+
+ return img, targets
+
+
+def box_candidates(box1, box2, wh_thr=2, ar_thr=20, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
+ # Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
+ w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
+ w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
+ ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
+ return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
+
+
+def bbox_ioa(box1, box2):
+ # Returns the intersection over box2 area given box1, box2. box1 is 4, box2 is nx4. boxes are x1y1x2y2
+ box2 = box2.transpose()
+
+ # Get the coordinates of bounding boxes
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+
+ # Intersection area
+ inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
+ (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)
+
+ # box2 area
+ box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + 1e-16
+
+ # Intersection over box2 area
+ return inter_area / box2_area
+
+
+def cutout(image, labels):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ h, w = image.shape[:2]
+
+ # create random masks
+ scales = [0.5] * 1 + [0.25] * 2 + [0.125] * 4 + [0.0625] * 8 + [0.03125] * 16 # image size fraction
+ for s in scales:
+ mask_h = random.randint(1, int(h * s))
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ # apply random color mask
+ image[ymin:ymax, xmin:xmax] = [random.randint(64, 191) for _ in range(3)]
+
+ # return unobscured labels
+ if len(labels) and s > 0.03:
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ labels = labels[ioa < 0.60] # remove >60% obscured labels
+
+ return labels
+
+
+def pastein(image, labels, sample_labels, sample_images, sample_masks):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ h, w = image.shape[:2]
+
+ # create random masks
+ scales = [0.75] * 2 + [0.5] * 4 + [0.25] * 4 + [0.125] * 4 + [0.0625] * 6 # image size fraction
+ for s in scales:
+ if random.random() < 0.2:
+ continue
+ mask_h = random.randint(1, int(h * s))
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ if len(labels):
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ else:
+ ioa = np.zeros(1)
+
+ if (ioa < 0.30).all() and len(sample_labels) and (xmax > xmin+20) and (ymax > ymin+20): # allow 30% obscuration of existing labels
+ sel_ind = random.randint(0, len(sample_labels)-1)
+ #print(len(sample_labels))
+ #print(sel_ind)
+ #print((xmax-xmin, ymax-ymin))
+ #print(image[ymin:ymax, xmin:xmax].shape)
+ #print([[sample_labels[sel_ind], *box]])
+ #print(labels.shape)
+ hs, ws, cs = sample_images[sel_ind].shape
+ r_scale = min((ymax-ymin)/hs, (xmax-xmin)/ws)
+ r_w = int(ws*r_scale)
+ r_h = int(hs*r_scale)
+
+ if (r_w > 10) and (r_h > 10):
+ r_mask = cv2.resize(sample_masks[sel_ind], (r_w, r_h))
+ r_image = cv2.resize(sample_images[sel_ind], (r_w, r_h))
+ temp_crop = image[ymin:ymin+r_h, xmin:xmin+r_w]
+ m_ind = r_mask > 0
+ if m_ind.astype(np.int).sum() > 60:
+ temp_crop[m_ind] = r_image[m_ind]
+ #print(sample_labels[sel_ind])
+ #print(sample_images[sel_ind].shape)
+ #print(temp_crop.shape)
+ box = np.array([xmin, ymin, xmin+r_w, ymin+r_h], dtype=np.float32)
+ if len(labels):
+ labels = np.concatenate((labels, [[sample_labels[sel_ind], *box]]), 0)
+ else:
+ labels = np.array([[sample_labels[sel_ind], *box]])
+
+ image[ymin:ymin+r_h, xmin:xmin+r_w] = temp_crop
+
+ return labels
+
+class Albumentations:
+ # YOLOv5 Albumentations class (optional, only used if package is installed)
+ def __init__(self):
+ self.transform = None
+ import albumentations as A
+
+ self.transform = A.Compose([
+ A.CLAHE(p=0.01),
+ A.RandomBrightnessContrast(brightness_limit=0.2, contrast_limit=0.2, p=0.01),
+ A.RandomGamma(gamma_limit=[80, 120], p=0.01),
+ A.Blur(p=0.01),
+ A.MedianBlur(p=0.01),
+ A.ToGray(p=0.01),
+ A.ImageCompression(quality_lower=75, p=0.01),],
+ bbox_params=A.BboxParams(format='pascal_voc', label_fields=['class_labels']))
+
+ #logging.info(colorstr('albumentations: ') + ', '.join(f'{x}' for x in self.transform.transforms if x.p))
+
+ def __call__(self, im, labels, p=1.0):
+ if self.transform and random.random() < p:
+ new = self.transform(image=im, bboxes=labels[:, 1:], class_labels=labels[:, 0]) # transformed
+ im, labels = new['image'], np.array([[c, *b] for c, b in zip(new['class_labels'], new['bboxes'])])
+ return im, labels
+
+
+def create_folder(path='./new'):
+ # Create folder
+ if os.path.exists(path):
+ shutil.rmtree(path) # delete output folder
+ os.makedirs(path) # make new output folder
+
+
+def flatten_recursive(path='../coco'):
+ # Flatten a recursive directory by bringing all files to top level
+ new_path = Path(path + '_flat')
+ create_folder(new_path)
+ for file in tqdm(glob.glob(str(Path(path)) + '/**/*.*', recursive=True)):
+ shutil.copyfile(file, new_path / Path(file).name)
+
+
+def extract_boxes(path='../coco/'): # from utils.datasets import *; extract_boxes('../coco128')
+ # Convert detection dataset into classification dataset, with one directory per class
+
+ path = Path(path) # images dir
+ shutil.rmtree(path / 'classifier') if (path / 'classifier').is_dir() else None # remove existing
+ files = list(path.rglob('*.*'))
+ n = len(files) # number of files
+ for im_file in tqdm(files, total=n):
+ if im_file.suffix[1:] in img_formats:
+ # image
+ im = cv2.imread(str(im_file))[..., ::-1] # BGR to RGB
+ h, w = im.shape[:2]
+
+ # labels
+ lb_file = Path(img2label_paths([str(im_file)])[0])
+ if Path(lb_file).exists():
+ with open(lb_file, 'r') as f:
+ lb = np.array([x.split() for x in f.read().strip().splitlines()], dtype=np.float32) # labels
+
+ for j, x in enumerate(lb):
+ c = int(x[0]) # class
+ f = (path / 'classifier') / f'{c}' / f'{path.stem}_{im_file.stem}_{j}.jpg' # new filename
+ if not f.parent.is_dir():
+ f.parent.mkdir(parents=True)
+
+ b = x[1:] * [w, h, w, h] # box
+ # b[2:] = b[2:].max() # rectangle to square
+ b[2:] = b[2:] * 1.2 + 3 # pad
+ b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
+
+ b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
+ b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
+ assert cv2.imwrite(str(f), im[b[1]:b[3], b[0]:b[2]]), f'box failure in {f}'
+
+
+def autosplit(path='../coco', weights=(0.9, 0.1, 0.0), annotated_only=False):
+ """ Autosplit a dataset into train/val/test splits and save path/autosplit_*.txt files
+ Usage: from utils.datasets import *; autosplit('../coco')
+ Arguments
+ path: Path to images directory
+ weights: Train, val, test weights (list)
+ annotated_only: Only use images with an annotated txt file
+ """
+ path = Path(path) # images dir
+ files = sum([list(path.rglob(f"*.{img_ext}")) for img_ext in img_formats], []) # image files only
+ n = len(files) # number of files
+ indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
+
+ txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
+ [(path / x).unlink() for x in txt if (path / x).exists()] # remove existing
+
+ print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
+ for i, img in tqdm(zip(indices, files), total=n):
+ if not annotated_only or Path(img2label_paths([str(img)])[0]).exists(): # check label
+ with open(path / txt[i], 'a') as f:
+ f.write(str(img) + '\n') # add image to txt file
+
+
+def load_segmentations(self, index):
+ key = '/work/handsomejw66/coco17/' + self.img_files[index]
+ #print(key)
+ # /work/handsomejw66/coco17/
+ return self.segs[key]
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/general.py b/oneAPI_ODAV_APP/ENGINES/utils/general.py
new file mode 100644
index 000000000..cca7a97eb
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/general.py
@@ -0,0 +1,893 @@
+# YOLOR general utils
+
+import glob
+import logging
+import math
+import os
+import platform
+import random
+import re
+import subprocess
+import time
+from pathlib import Path
+
+import cv2
+import numpy as np
+import pandas as pd
+import torch
+import torchvision
+import yaml
+
+from utils.google_utils import gsutil_getsize
+from utils.metrics import fitness
+from utils.torch_utils import init_torch_seeds
+
+
+# Settings
+torch.set_printoptions(linewidth=320, precision=5, profile='long')
+np.set_printoptions(linewidth=320, formatter={'float_kind': '{:11.5g}'.format}) # format short g, %precision=5
+pd.options.display.max_columns = 10
+cv2.setNumThreads(0) # prevent OpenCV from multithreading (incompatible with PyTorch DataLoader)
+os.environ['NUMEXPR_MAX_THREADS'] = str(min(os.cpu_count(), 8)) # NumExpr max threads
+
+
+def set_logging(rank=-1):
+ logging.basicConfig(
+ format="%(message)s",
+ level=logging.INFO if rank in [-1, 0] else logging.WARN)
+
+
+def init_seeds(seed=0):
+ # Initialize random number generator (RNG) seeds
+ random.seed(seed)
+ np.random.seed(seed)
+ init_torch_seeds(seed)
+
+
+def get_latest_run(search_dir='.'):
+ # Return path to most recent 'last.pt' in /runs (i.e. to --resume from)
+ last_list = glob.glob(f'{search_dir}/**/last*.pt', recursive=True)
+ return max(last_list, key=os.path.getctime) if last_list else ''
+
+
+def isdocker():
+ # Is environment a Docker container
+ return Path('/workspace').exists() # or Path('/.dockerenv').exists()
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+def check_online():
+ # Check internet connectivity
+ import socket
+ try:
+ socket.create_connection(("1.1.1.1", 443), 5) # check host accesability
+ return True
+ except OSError:
+ return False
+
+
+def check_git_status():
+ # Recommend 'git pull' if code is out of date
+ print(colorstr('github: '), end='')
+ try:
+ assert Path('.git').exists(), 'skipping check (not a git repository)'
+ assert not isdocker(), 'skipping check (Docker image)'
+ assert check_online(), 'skipping check (offline)'
+
+ cmd = 'git fetch && git config --get remote.origin.url'
+ url = subprocess.check_output(cmd, shell=True).decode().strip().rstrip('.git') # github repo url
+ branch = subprocess.check_output('git rev-parse --abbrev-ref HEAD', shell=True).decode().strip() # checked out
+ n = int(subprocess.check_output(f'git rev-list {branch}..origin/master --count', shell=True)) # commits behind
+ if n > 0:
+ s = f"⚠️ WARNING: code is out of date by {n} commit{'s' * (n > 1)}. " \
+ f"Use 'git pull' to update or 'git clone {url}' to download latest."
+ else:
+ s = f'up to date with {url} ✅'
+ print(emojis(s)) # emoji-safe
+ except Exception as e:
+ print(e)
+
+
+def check_requirements(requirements='requirements.txt', exclude=()):
+ # Check installed dependencies meet requirements (pass *.txt file or list of packages)
+ import pkg_resources as pkg
+ prefix = colorstr('red', 'bold', 'requirements:')
+ if isinstance(requirements, (str, Path)): # requirements.txt file
+ file = Path(requirements)
+ if not file.exists():
+ print(f"{prefix} {file.resolve()} not found, check failed.")
+ return
+ requirements = [f'{x.name}{x.specifier}' for x in pkg.parse_requirements(file.open()) if x.name not in exclude]
+ else: # list or tuple of packages
+ requirements = [x for x in requirements if x not in exclude]
+
+ n = 0 # number of packages updates
+ for r in requirements:
+ try:
+ pkg.require(r)
+ except Exception as e: # DistributionNotFound or VersionConflict if requirements not met
+ n += 1
+ print(f"{prefix} {e.req} not found and is required by YOLOR, attempting auto-update...")
+ print(subprocess.check_output(f"pip install '{e.req}'", shell=True).decode())
+
+ if n: # if packages updated
+ source = file.resolve() if 'file' in locals() else requirements
+ s = f"{prefix} {n} package{'s' * (n > 1)} updated per {source}\n" \
+ f"{prefix} ⚠️ {colorstr('bold', 'Restart runtime or rerun command for updates to take effect')}\n"
+ print(emojis(s)) # emoji-safe
+
+
+def check_img_size(img_size, s=32):
+ # Verify img_size is a multiple of stride s
+ new_size = make_divisible(img_size, int(s)) # ceil gs-multiple
+ if new_size != img_size:
+ print('WARNING: --img-size %g must be multiple of max stride %g, updating to %g' % (img_size, s, new_size))
+ return new_size
+
+
+def check_imshow():
+ # Check if environment supports image displays
+ try:
+ assert not isdocker(), 'cv2.imshow() is disabled in Docker environments'
+ cv2.imshow('test', np.zeros((1, 1, 3)))
+ cv2.waitKey(1)
+ cv2.destroyAllWindows()
+ cv2.waitKey(1)
+ return True
+ except Exception as e:
+ print(f'WARNING: Environment does not support cv2.imshow() or PIL Image.show() image displays\n{e}')
+ return False
+
+
+def check_file(file):
+ # Search for file if not found
+ if Path(file).is_file() or file == '':
+ return file
+ else:
+ files = glob.glob('./**/' + file, recursive=True) # find file
+ assert len(files), f'File Not Found: {file}' # assert file was found
+ assert len(files) == 1, f"Multiple files match '{file}', specify exact path: {files}" # assert unique
+ return files[0] # return file
+
+
+def check_dataset(dict):
+ # Download dataset if not found locally
+ val, s = dict.get('val'), dict.get('download')
+ if val and len(val):
+ val = [Path(x).resolve() for x in (val if isinstance(val, list) else [val])] # val path
+ if not all(x.exists() for x in val):
+ print('\nWARNING: Dataset not found, nonexistent paths: %s' % [str(x) for x in val if not x.exists()])
+ if s and len(s): # download script
+ print('Downloading %s ...' % s)
+ if s.startswith('http') and s.endswith('.zip'): # URL
+ f = Path(s).name # filename
+ torch.hub.download_url_to_file(s, f)
+ r = os.system('unzip -q %s -d ../ && rm %s' % (f, f)) # unzip
+ else: # bash script
+ r = os.system(s)
+ print('Dataset autodownload %s\n' % ('success' if r == 0 else 'failure')) # analyze return value
+ else:
+ raise Exception('Dataset not found.')
+
+
+def make_divisible(x, divisor):
+ # Returns x evenly divisible by divisor
+ return math.ceil(x / divisor) * divisor
+
+
+def clean_str(s):
+ # Cleans a string by replacing special characters with underscore _
+ return re.sub(pattern="[|@#!¡·$€%&()=?¿^*;:,¨´><+]", repl="_", string=s)
+
+
+def one_cycle(y1=0.0, y2=1.0, steps=100):
+ # lambda function for sinusoidal ramp from y1 to y2
+ return lambda x: ((1 - math.cos(x * math.pi / steps)) / 2) * (y2 - y1) + y1
+
+
+def colorstr(*input):
+ # Colors a string https://en.wikipedia.org/wiki/ANSI_escape_code, i.e. colorstr('blue', 'hello world')
+ *args, string = input if len(input) > 1 else ('blue', 'bold', input[0]) # color arguments, string
+ colors = {'black': '\033[30m', # basic colors
+ 'red': '\033[31m',
+ 'green': '\033[32m',
+ 'yellow': '\033[33m',
+ 'blue': '\033[34m',
+ 'magenta': '\033[35m',
+ 'cyan': '\033[36m',
+ 'white': '\033[37m',
+ 'bright_black': '\033[90m', # bright colors
+ 'bright_red': '\033[91m',
+ 'bright_green': '\033[92m',
+ 'bright_yellow': '\033[93m',
+ 'bright_blue': '\033[94m',
+ 'bright_magenta': '\033[95m',
+ 'bright_cyan': '\033[96m',
+ 'bright_white': '\033[97m',
+ 'end': '\033[0m', # misc
+ 'bold': '\033[1m',
+ 'underline': '\033[4m'}
+ return ''.join(colors[x] for x in args) + f'{string}' + colors['end']
+
+
+def labels_to_class_weights(labels, nc=80):
+ # Get class weights (inverse frequency) from training labels
+ if labels[0] is None: # no labels loaded
+ return torch.Tensor()
+
+ labels = np.concatenate(labels, 0) # labels.shape = (866643, 5) for COCO
+ classes = labels[:, 0].astype(np.int) # labels = [class xywh]
+ weights = np.bincount(classes, minlength=nc) # occurrences per class
+
+ # Prepend gridpoint count (for uCE training)
+ # gpi = ((320 / 32 * np.array([1, 2, 4])) ** 2 * 3).sum() # gridpoints per image
+ # weights = np.hstack([gpi * len(labels) - weights.sum() * 9, weights * 9]) ** 0.5 # prepend gridpoints to start
+
+ weights[weights == 0] = 1 # replace empty bins with 1
+ weights = 1 / weights # number of targets per class
+ weights /= weights.sum() # normalize
+ return torch.from_numpy(weights)
+
+
+def labels_to_image_weights(labels, nc=80, class_weights=np.ones(80)):
+ # Produces image weights based on class_weights and image contents
+ class_counts = np.array([np.bincount(x[:, 0].astype(np.int), minlength=nc) for x in labels])
+ image_weights = (class_weights.reshape(1, nc) * class_counts).sum(1)
+ # index = random.choices(range(n), weights=image_weights, k=1) # weight image sample
+ return image_weights
+
+
+def coco80_to_coco91_class(): # converts 80-index (val2014) to 91-index (paper)
+ # https://tech.amikelive.com/node-718/what-object-categories-labels-are-in-coco-dataset/
+ # a = np.loadtxt('data/coco.names', dtype='str', delimiter='\n')
+ # b = np.loadtxt('data/coco_paper.names', dtype='str', delimiter='\n')
+ # x1 = [list(a[i] == b).index(True) + 1 for i in range(80)] # darknet to coco
+ # x2 = [list(b[i] == a).index(True) if any(b[i] == a) else None for i in range(91)] # coco to darknet
+ x = [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 27, 28, 31, 32, 33, 34,
+ 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63,
+ 64, 65, 67, 70, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 84, 85, 86, 87, 88, 89, 90]
+ return x
+
+
+def xyxy2xywh(x):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = (x[:, 0] + x[:, 2]) / 2 # x center
+ y[:, 1] = (x[:, 1] + x[:, 3]) / 2 # y center
+ y[:, 2] = x[:, 2] - x[:, 0] # width
+ y[:, 3] = x[:, 3] - x[:, 1] # height
+ return y
+
+
+def xywh2xyxy(x):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
+ y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
+ y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
+ y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
+ return y
+
+
+def xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):
+ # Convert nx4 boxes from [x, y, w, h] normalized to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * (x[:, 0] - x[:, 2] / 2) + padw # top left x
+ y[:, 1] = h * (x[:, 1] - x[:, 3] / 2) + padh # top left y
+ y[:, 2] = w * (x[:, 0] + x[:, 2] / 2) + padw # bottom right x
+ y[:, 3] = h * (x[:, 1] + x[:, 3] / 2) + padh # bottom right y
+ return y
+
+
+def xyn2xy(x, w=640, h=640, padw=0, padh=0):
+ # Convert normalized segments into pixel segments, shape (n,2)
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * x[:, 0] + padw # top left x
+ y[:, 1] = h * x[:, 1] + padh # top left y
+ return y
+
+
+def segment2box(segment, width=640, height=640):
+ # Convert 1 segment label to 1 box label, applying inside-image constraint, i.e. (xy1, xy2, ...) to (xyxy)
+ x, y = segment.T # segment xy
+ inside = (x >= 0) & (y >= 0) & (x <= width) & (y <= height)
+ x, y, = x[inside], y[inside]
+ return np.array([x.min(), y.min(), x.max(), y.max()]) if any(x) else np.zeros((1, 4)) # xyxy
+
+
+def segments2boxes(segments):
+ # Convert segment labels to box labels, i.e. (cls, xy1, xy2, ...) to (cls, xywh)
+ boxes = []
+ for s in segments:
+ x, y = s.T # segment xy
+ boxes.append([x.min(), y.min(), x.max(), y.max()]) # cls, xyxy
+ return xyxy2xywh(np.array(boxes)) # cls, xywh
+
+
+def resample_segments(segments, n=1000):
+ # Up-sample an (n,2) segment
+ for i, s in enumerate(segments):
+ s = np.concatenate((s, s[0:1, :]), axis=0)
+ x = np.linspace(0, len(s) - 1, n)
+ xp = np.arange(len(s))
+ segments[i] = np.concatenate([np.interp(x, xp, s[:, i]) for i in range(2)]).reshape(2, -1).T # segment xy
+ return segments
+
+
+def scale_coords(img1_shape, coords, img0_shape, ratio_pad=None):
+ # Rescale coords (xyxy) from img1_shape to img0_shape
+ if ratio_pad is None: # calculate from img0_shape
+ gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
+ pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
+ else:
+ gain = ratio_pad[0][0]
+ pad = ratio_pad[1]
+
+ coords[:, [0, 2]] -= pad[0] # x padding
+ coords[:, [1, 3]] -= pad[1] # y padding
+ coords[:, :4] /= gain
+ clip_coords(coords, img0_shape)
+ return coords
+
+
+def clip_coords(boxes, img_shape):
+ # Clip bounding xyxy bounding boxes to image shape (height, width)
+ boxes[:, 0].clamp_(0, img_shape[1]) # x1
+ boxes[:, 1].clamp_(0, img_shape[0]) # y1
+ boxes[:, 2].clamp_(0, img_shape[1]) # x2
+ boxes[:, 3].clamp_(0, img_shape[0]) # y2
+
+
+def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
+ box2 = box2.T
+
+ # Get the coordinates of bounding boxes
+ if x1y1x2y2: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ else: # transform from xywh to xyxy
+ b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
+ b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
+ b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
+ b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ iou = inter / union
+
+ if GIoU or DIoU or CIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
+ (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
+ if DIoU:
+ return iou - rho2 / c2 # DIoU
+ elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
+ with torch.no_grad():
+ alpha = v / (v - iou + (1 + eps))
+ return iou - (rho2 / c2 + v * alpha) # CIoU
+ else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ c_area = cw * ch + eps # convex area
+ return iou - (c_area - union) / c_area # GIoU
+ else:
+ return iou # IoU
+
+
+
+
+def bbox_alpha_iou(box1, box2, x1y1x2y2=False, GIoU=False, DIoU=False, CIoU=False, alpha=2, eps=1e-9):
+ # Returns tsqrt_he IoU of box1 to box2. box1 is 4, box2 is nx4
+ box2 = box2.T
+
+ # Get the coordinates of bounding boxes
+ if x1y1x2y2: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ else: # transform from xywh to xyxy
+ b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
+ b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
+ b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
+ b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ # change iou into pow(iou+eps)
+ # iou = inter / union
+ iou = torch.pow(inter/union + eps, alpha)
+ # beta = 2 * alpha
+ if GIoU or DIoU or CIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal
+ rho_x = torch.abs(b2_x1 + b2_x2 - b1_x1 - b1_x2)
+ rho_y = torch.abs(b2_y1 + b2_y2 - b1_y1 - b1_y2)
+ rho2 = ((rho_x ** 2 + rho_y ** 2) / 4) ** alpha # center distance
+ if DIoU:
+ return iou - rho2 / c2 # DIoU
+ elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
+ with torch.no_grad():
+ alpha_ciou = v / ((1 + eps) - inter / union + v)
+ # return iou - (rho2 / c2 + v * alpha_ciou) # CIoU
+ return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
+ else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ # c_area = cw * ch + eps # convex area
+ # return iou - (c_area - union) / c_area # GIoU
+ c_area = torch.max(cw * ch + eps, union) # convex area
+ return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU
+ else:
+ return iou # torch.log(iou+eps) or iou
+
+
+def box_iou(box1, box2):
+ # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ box1 (Tensor[N, 4])
+ box2 (Tensor[M, 4])
+ Returns:
+ iou (Tensor[N, M]): the NxM matrix containing the pairwise
+ IoU values for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ return inter / (area1[:, None] + area2 - inter) # iou = inter / (area1 + area2 - inter)
+
+
+def wh_iou(wh1, wh2):
+ # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
+ wh1 = wh1[:, None] # [N,1,2]
+ wh2 = wh2[None] # [1,M,2]
+ inter = torch.min(wh1, wh2).prod(2) # [N,M]
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter) # iou = inter / (area1 + area2 - inter)
+
+
+def box_giou(box1, box2):
+ """
+ Return generalized intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise generalized IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ areai = whi[:, :, 0] * whi[:, :, 1]
+
+ return iou - (areai - union) / areai
+
+
+def box_ciou(box1, box2, eps: float = 1e-7):
+ """
+ Return complete intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ eps (float, optional): small number to prevent division by zero. Default: 1e-7
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise complete IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ diagonal_distance_squared = (whi[:, :, 0] ** 2) + (whi[:, :, 1] ** 2) + eps
+
+ # centers of boxes
+ x_p = (box1[:, None, 0] + box1[:, None, 2]) / 2
+ y_p = (box1[:, None, 1] + box1[:, None, 3]) / 2
+ x_g = (box2[:, 0] + box2[:, 2]) / 2
+ y_g = (box2[:, 1] + box2[:, 3]) / 2
+ # The distance between boxes' centers squared.
+ centers_distance_squared = (x_p - x_g) ** 2 + (y_p - y_g) ** 2
+
+ w_pred = box1[:, None, 2] - box1[:, None, 0]
+ h_pred = box1[:, None, 3] - box1[:, None, 1]
+
+ w_gt = box2[:, 2] - box2[:, 0]
+ h_gt = box2[:, 3] - box2[:, 1]
+
+ v = (4 / (torch.pi ** 2)) * torch.pow((torch.atan(w_gt / h_gt) - torch.atan(w_pred / h_pred)), 2)
+ with torch.no_grad():
+ alpha = v / (1 - iou + v + eps)
+ return iou - (centers_distance_squared / diagonal_distance_squared) - alpha * v
+
+
+def box_diou(box1, box2, eps: float = 1e-7):
+ """
+ Return distance intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ eps (float, optional): small number to prevent division by zero. Default: 1e-7
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise distance IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ diagonal_distance_squared = (whi[:, :, 0] ** 2) + (whi[:, :, 1] ** 2) + eps
+
+ # centers of boxes
+ x_p = (box1[:, None, 0] + box1[:, None, 2]) / 2
+ y_p = (box1[:, None, 1] + box1[:, None, 3]) / 2
+ x_g = (box2[:, 0] + box2[:, 2]) / 2
+ y_g = (box2[:, 1] + box2[:, 3]) / 2
+ # The distance between boxes' centers squared.
+ centers_distance_squared = (x_p - x_g) ** 2 + (y_p - y_g) ** 2
+
+ # The distance IoU is the IoU penalized by a normalized
+ # distance between boxes' centers squared.
+ return iou - (centers_distance_squared / diagonal_distance_squared)
+
+
+def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
+ labels=()):
+ """Runs Non-Maximum Suppression (NMS) on inference results
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+
+ nc = prediction.shape[2] - 5 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Settings
+ min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
+ max_det = 300 # maximum number of detections per image
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 10.0 # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0, 6), device=prediction.device)] * prediction.shape[0]
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ l = labels[xi]
+ v = torch.zeros((len(l), nc + 5), device=x.device)
+ v[:, :4] = l[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ if nc == 1:
+ x[:, 5:] = x[:, 4:5] # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ print(f'WARNING: NMS time limit {time_limit}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def non_max_suppression_kpt(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
+ labels=(), kpt_label=False, nc=None, nkpt=None):
+ """Runs Non-Maximum Suppression (NMS) on inference results
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+ if nc is None:
+ nc = prediction.shape[2] - 5 if not kpt_label else prediction.shape[2] - 56 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Settings
+ min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
+ max_det = 300 # maximum number of detections per image
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 10.0 # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0,6), device=prediction.device)] * prediction.shape[0]
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ l = labels[xi]
+ v = torch.zeros((len(l), nc + 5), device=x.device)
+ v[:, :4] = l[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ x[:, 5:5+nc] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ if not kpt_label:
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+ else:
+ kpts = x[:, 6:]
+ conf, j = x[:, 5:6].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float(), kpts), 1)[conf.view(-1) > conf_thres]
+
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ print(f'WARNING: NMS time limit {time_limit}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def strip_optimizer(f='best.pt', s=''): # from utils.general import *; strip_optimizer()
+ # Strip optimizer from 'f' to finalize training, optionally save as 's'
+ x = torch.load(f, map_location=torch.device('cpu'))
+ if x.get('ema'):
+ x['model'] = x['ema'] # replace model with ema
+ for k in 'optimizer', 'training_results', 'wandb_id', 'ema', 'updates': # keys
+ x[k] = None
+ x['epoch'] = -1
+ x['model'].half() # to FP16
+ for p in x['model'].parameters():
+ p.requires_grad = False
+ torch.save(x, s or f)
+ mb = os.path.getsize(s or f) / 1E6 # filesize
+ print(f"Optimizer stripped from {f},{(' saved as %s,' % s) if s else ''} {mb:.1f}MB")
+
+
+def print_mutation(hyp, results, yaml_file='hyp_evolved.yaml', bucket=''):
+ # Print mutation results to evolve.txt (for use with train.py --evolve)
+ a = '%10s' * len(hyp) % tuple(hyp.keys()) # hyperparam keys
+ b = '%10.3g' * len(hyp) % tuple(hyp.values()) # hyperparam values
+ c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
+ print('\n%s\n%s\nEvolved fitness: %s\n' % (a, b, c))
+
+ if bucket:
+ url = 'gs://%s/evolve.txt' % bucket
+ if gsutil_getsize(url) > (os.path.getsize('evolve.txt') if os.path.exists('evolve.txt') else 0):
+ os.system('gsutil cp %s .' % url) # download evolve.txt if larger than local
+
+ with open('evolve.txt', 'a') as f: # append result
+ f.write(c + b + '\n')
+ x = np.unique(np.loadtxt('evolve.txt', ndmin=2), axis=0) # load unique rows
+ x = x[np.argsort(-fitness(x))] # sort
+ np.savetxt('evolve.txt', x, '%10.3g') # save sort by fitness
+
+ # Save yaml
+ for i, k in enumerate(hyp.keys()):
+ hyp[k] = float(x[0, i + 7])
+ with open(yaml_file, 'w') as f:
+ results = tuple(x[0, :7])
+ c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
+ f.write('# Hyperparameter Evolution Results\n# Generations: %g\n# Metrics: ' % len(x) + c + '\n\n')
+ yaml.dump(hyp, f, sort_keys=False)
+
+ if bucket:
+ os.system('gsutil cp evolve.txt %s gs://%s' % (yaml_file, bucket)) # upload
+
+
+def apply_classifier(x, model, img, im0):
+ # applies a second stage classifier to yolo outputs
+ im0 = [im0] if isinstance(im0, np.ndarray) else im0
+ for i, d in enumerate(x): # per image
+ if d is not None and len(d):
+ d = d.clone()
+
+ # Reshape and pad cutouts
+ b = xyxy2xywh(d[:, :4]) # boxes
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # rectangle to square
+ b[:, 2:] = b[:, 2:] * 1.3 + 30 # pad
+ d[:, :4] = xywh2xyxy(b).long()
+
+ # Rescale boxes from img_size to im0 size
+ scale_coords(img.shape[2:], d[:, :4], im0[i].shape)
+
+ # Classes
+ pred_cls1 = d[:, 5].long()
+ ims = []
+ for j, a in enumerate(d): # per item
+ cutout = im0[i][int(a[1]):int(a[3]), int(a[0]):int(a[2])]
+ im = cv2.resize(cutout, (224, 224)) # BGR
+ # cv2.imwrite('test%i.jpg' % j, cutout)
+
+ im = im[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ im = np.ascontiguousarray(im, dtype=np.float32) # uint8 to float32
+ im /= 255.0 # 0 - 255 to 0.0 - 1.0
+ ims.append(im)
+
+ pred_cls2 = model(torch.Tensor(ims).to(d.device)).argmax(1) # classifier prediction
+ x[i] = x[i][pred_cls1 == pred_cls2] # retain matching class detections
+
+ return x
+
+
+def increment_path(path, exist_ok=True, sep=''):
+ # Increment path, i.e. runs/exp --> runs/exp{sep}0, runs/exp{sep}1 etc.
+ path = Path(path) # os-agnostic
+ if (path.exists() and exist_ok) or (not path.exists()):
+ return str(path)
+ else:
+ dirs = glob.glob(f"{path}{sep}*") # similar paths
+ matches = [re.search(rf"%s{sep}(\d+)" % path.stem, d) for d in dirs]
+ i = [int(m.groups()[0]) for m in matches if m] # indices
+ n = max(i) + 1 if i else 2 # increment number
+ return f"{path}{sep}{n}" # update path
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/Dockerfile b/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/Dockerfile
new file mode 100644
index 000000000..8d6040f26
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/Dockerfile
@@ -0,0 +1,26 @@
+FROM gcr.io/google-appengine/python
+
+
+# Create a virtualenv for dependencies. This isolates these packages from
+# system-level packages.
+# Use -p python3 or -p python3.7 to select python version. Default is version 2.
+RUN virtualenv /env -p python3
+
+# Setting these environment variables are the same as running
+# source /env/bin/activate.
+ENV VIRTUAL_ENV /env
+ENV PATH /env/bin:$PATH
+
+RUN apt-get update && apt-get install -y python-opencv
+
+# Copy the application's requirements.txt and run pip to install all
+# dependencies into the virtualenv.
+ADD requirements.txt /app/requirements.txt
+RUN pip install -r /app/requirements.txt
+
+# Add the application source code.
+ADD . /app
+
+# Run a WSGI server to serve the application. gunicorn must be declared as
+# a dependency in requirements.txt.
+CMD gunicorn -b :$PORT main:app
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/additional_requirements.txt b/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/additional_requirements.txt
new file mode 100644
index 000000000..a40b65907
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/additional_requirements.txt
@@ -0,0 +1,5 @@
+# add these requirements in your app on top of the existing ones
+pip==18.1
+Flask==1.0.2
+gunicorn==19.9.0
+
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/app.yaml b/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/app.yaml
new file mode 100644
index 000000000..61bfcdfe7
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/app.yaml
@@ -0,0 +1,14 @@
+runtime: custom
+env: flex
+
+service: yolorapp
+
+liveness_check:
+ initial_delay_sec: 600
+
+manual_scaling:
+ instances: 1
+resources:
+ cpu: 1
+ memory_gb: 4
+ disk_size_gb: 20
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/google_utils.py b/oneAPI_ODAV_APP/ENGINES/utils/google_utils.py
new file mode 100644
index 000000000..b2a818336
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/google_utils.py
@@ -0,0 +1,124 @@
+# Google utils: https://cloud.google.com/storage/docs/reference/libraries
+
+import os
+import platform
+import subprocess
+import time
+from pathlib import Path
+
+import requests
+import torch
+
+
+
+def gsutil_getsize(url=''):
+ # gs://bucket/file size https://cloud.google.com/storage/docs/gsutil/commands/du
+ s = subprocess.check_output(f'gsutil du {url}', shell=True).decode('utf-8')
+ return eval(s.split(' ')[0]) if len(s) else 0 # bytes
+
+
+def attempt_download(file, repo='WongKinYiu/yolov7'):
+ # Attempt file download if does not exist
+ file = Path(str(file).strip().replace("'", '').lower())
+
+ if not file.exists():
+ try:
+ response = requests.get(f'https://api.github.com/repos/{repo}/releases/latest').json() # github api
+ assets = [x['name'] for x in response['assets']] # release assets
+ tag = response['tag_name'] # i.e. 'v1.0'
+ except: # fallback plan
+ assets = ['yolov7.pt', 'yolov7-tiny.pt', 'yolov7x.pt', 'yolov7-d6.pt', 'yolov7-e6.pt',
+ 'yolov7-e6e.pt', 'yolov7-w6.pt']
+ tag = subprocess.check_output('git tag', shell=True).decode().split()[-1]
+
+ name = file.name
+ if name in assets:
+ msg = f'{file} missing, try downloading from https://github.com/{repo}/releases/'
+ redundant = False # second download option
+ try: # GitHub
+ url = f'https://github.com/{repo}/releases/download/{tag}/{name}'
+ print(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, file)
+ assert file.exists() and file.stat().st_size > 1E6 # check
+ except Exception as e: # GCP
+ print(f'Download error: {e}')
+ assert redundant, 'No secondary mirror'
+ url = f'https://storage.googleapis.com/{repo}/ckpt/{name}'
+ print(f'Downloading {url} to {file}...')
+ os.system(f'curl -L {url} -o {file}') # torch.hub.download_url_to_file(url, weights)
+ finally:
+ if not file.exists() or file.stat().st_size < 1E6: # check
+ file.unlink(missing_ok=True) # remove partial downloads
+ print(f'ERROR: Download failure: {msg}')
+ print('')
+ return
+
+
+def gdrive_download(id='', file='tmp.zip'):
+ # Downloads a file from Google Drive. from yolov7.utils.google_utils import *; gdrive_download()
+ t = time.time()
+ file = Path(file)
+ cookie = Path('cookie') # gdrive cookie
+ print(f'Downloading https://drive.google.com/uc?export=download&id={id} as {file}... ', end='')
+ file.unlink(missing_ok=True) # remove existing file
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Attempt file download
+ out = "NUL" if platform.system() == "Windows" else "/dev/null"
+ os.system(f'curl -c ./cookie -s -L "drive.google.com/uc?export=download&id={id}" > {out}')
+ if os.path.exists('cookie'): # large file
+ s = f'curl -Lb ./cookie "drive.google.com/uc?export=download&confirm={get_token()}&id={id}" -o {file}'
+ else: # small file
+ s = f'curl -s -L -o {file} "drive.google.com/uc?export=download&id={id}"'
+ r = os.system(s) # execute, capture return
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Error check
+ if r != 0:
+ file.unlink(missing_ok=True) # remove partial
+ print('Download error ') # raise Exception('Download error')
+ return r
+
+ # Unzip if archive
+ if file.suffix == '.zip':
+ print('unzipping... ', end='')
+ os.system(f'unzip -q {file}') # unzip
+ file.unlink() # remove zip to free space
+
+ print(f'Done ({time.time() - t:.1f}s)')
+ return r
+
+
+def get_token(cookie="./cookie"):
+ with open(cookie) as f:
+ for line in f:
+ if "download" in line:
+ return line.split()[-1]
+ return ""
+
+# def upload_blob(bucket_name, source_file_name, destination_blob_name):
+# # Uploads a file to a bucket
+# # https://cloud.google.com/storage/docs/uploading-objects#storage-upload-object-python
+#
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(destination_blob_name)
+#
+# blob.upload_from_filename(source_file_name)
+#
+# print('File {} uploaded to {}.'.format(
+# source_file_name,
+# destination_blob_name))
+#
+#
+# def download_blob(bucket_name, source_blob_name, destination_file_name):
+# # Uploads a blob from a bucket
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(source_blob_name)
+#
+# blob.download_to_filename(destination_file_name)
+#
+# print('Blob {} downloaded to {}.'.format(
+# source_blob_name,
+# destination_file_name))
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/loss.py b/oneAPI_ODAV_APP/ENGINES/utils/loss.py
new file mode 100644
index 000000000..8468e3dbb
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/loss.py
@@ -0,0 +1,1698 @@
+# Loss functions
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+from utils.general import bbox_iou, bbox_alpha_iou, box_iou, box_giou, box_diou, box_ciou, xywh2xyxy
+from utils.torch_utils import is_parallel
+
+
+
+def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
+ # return positive, negative label smoothing BCE targets
+ return 1.0 - 0.5 * eps, 0.5 * eps
+
+
+class BCEBlurWithLogitsLoss(nn.Module):
+ # BCEwithLogitLoss() with reduced missing label effects.
+ def __init__(self, alpha=0.05):
+ super(BCEBlurWithLogitsLoss, self).__init__()
+ self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
+ self.alpha = alpha
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ pred = torch.sigmoid(pred) # prob from logits
+ dx = pred - true # reduce only missing label effects
+ # dx = (pred - true).abs() # reduce missing label and false label effects
+ alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
+ loss *= alpha_factor
+ return loss.mean()
+
+
+class SigmoidBin(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, bin_count=10, min=0.0, max=1.0, reg_scale = 2.0, use_loss_regression=True, use_fw_regression=True, BCE_weight=1.0, smooth_eps=0.0):
+ super(SigmoidBin, self).__init__()
+
+ self.bin_count = bin_count
+ self.length = bin_count + 1
+ self.min = min
+ self.max = max
+ self.scale = float(max - min)
+ self.shift = self.scale / 2.0
+
+ self.use_loss_regression = use_loss_regression
+ self.use_fw_regression = use_fw_regression
+ self.reg_scale = reg_scale
+ self.BCE_weight = BCE_weight
+
+ start = min + (self.scale/2.0) / self.bin_count
+ end = max - (self.scale/2.0) / self.bin_count
+ step = self.scale / self.bin_count
+ self.step = step
+ #print(f" start = {start}, end = {end}, step = {step} ")
+
+ bins = torch.range(start, end + 0.0001, step).float()
+ self.register_buffer('bins', bins)
+
+
+ self.cp = 1.0 - 0.5 * smooth_eps
+ self.cn = 0.5 * smooth_eps
+
+ self.BCEbins = nn.BCEWithLogitsLoss(pos_weight=torch.Tensor([BCE_weight]))
+ self.MSELoss = nn.MSELoss()
+
+ def get_length(self):
+ return self.length
+
+ def forward(self, pred):
+ assert pred.shape[-1] == self.length, 'pred.shape[-1]=%d is not equal to self.length=%d' % (pred.shape[-1], self.length)
+
+ pred_reg = (pred[..., 0] * self.reg_scale - self.reg_scale/2.0) * self.step
+ pred_bin = pred[..., 1:(1+self.bin_count)]
+
+ _, bin_idx = torch.max(pred_bin, dim=-1)
+ bin_bias = self.bins[bin_idx]
+
+ if self.use_fw_regression:
+ result = pred_reg + bin_bias
+ else:
+ result = bin_bias
+ result = result.clamp(min=self.min, max=self.max)
+
+ return result
+
+
+ def training_loss(self, pred, target):
+ assert pred.shape[-1] == self.length, 'pred.shape[-1]=%d is not equal to self.length=%d' % (pred.shape[-1], self.length)
+ assert pred.shape[0] == target.shape[0], 'pred.shape=%d is not equal to the target.shape=%d' % (pred.shape[0], target.shape[0])
+ device = pred.device
+
+ pred_reg = (pred[..., 0].sigmoid() * self.reg_scale - self.reg_scale/2.0) * self.step
+ pred_bin = pred[..., 1:(1+self.bin_count)]
+
+ diff_bin_target = torch.abs(target[..., None] - self.bins)
+ _, bin_idx = torch.min(diff_bin_target, dim=-1)
+
+ bin_bias = self.bins[bin_idx]
+ bin_bias.requires_grad = False
+ result = pred_reg + bin_bias
+
+ target_bins = torch.full_like(pred_bin, self.cn, device=device) # targets
+ n = pred.shape[0]
+ target_bins[range(n), bin_idx] = self.cp
+
+ loss_bin = self.BCEbins(pred_bin, target_bins) # BCE
+
+ if self.use_loss_regression:
+ loss_regression = self.MSELoss(result, target) # MSE
+ loss = loss_bin + loss_regression
+ else:
+ loss = loss_bin
+
+ out_result = result.clamp(min=self.min, max=self.max)
+
+ return loss, out_result
+
+
+class FocalLoss(nn.Module):
+ # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(FocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ # p_t = torch.exp(-loss)
+ # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
+
+ # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = (1.0 - p_t) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class QFocalLoss(nn.Module):
+ # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(QFocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = torch.abs(true - pred_prob) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+class RankSort(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, delta_RS=0.50, eps=1e-10):
+
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets > 0.)
+ fg_logits = logits[fg_labels]
+ fg_targets = targets[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta_RS
+ relevant_bg_labels=((targets==0) & (logits>=threshold_logit))
+
+ relevant_bg_logits = logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ sorting_error=torch.zeros(fg_num).cuda()
+ ranking_error=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ # Difference Transforms (x_ij)
+ fg_relations=fg_logits-fg_logits[ii]
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+
+ if delta_RS > 0:
+ fg_relations=torch.clamp(fg_relations/(2*delta_RS)+0.5,min=0,max=1)
+ bg_relations=torch.clamp(bg_relations/(2*delta_RS)+0.5,min=0,max=1)
+ else:
+ fg_relations = (fg_relations >= 0).float()
+ bg_relations = (bg_relations >= 0).float()
+
+ # Rank of ii among pos and false positive number (bg with larger scores)
+ rank_pos=torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+
+ # Rank of ii among all examples
+ rank=rank_pos+FP_num
+
+ # Ranking error of example ii. target_ranking_error is always 0. (Eq. 7)
+ ranking_error[ii]=FP_num/rank
+
+ # Current sorting error of example ii. (Eq. 7)
+ current_sorting_error = torch.sum(fg_relations*(1-fg_targets))/rank_pos
+
+ #Find examples in the target sorted order for example ii
+ iou_relations = (fg_targets >= fg_targets[ii])
+ target_sorted_order = iou_relations * fg_relations
+
+ #The rank of ii among positives in sorted order
+ rank_pos_target = torch.sum(target_sorted_order)
+
+ #Compute target sorting error. (Eq. 8)
+ #Since target ranking error is 0, this is also total target error
+ target_sorting_error= torch.sum(target_sorted_order*(1-fg_targets))/rank_pos_target
+
+ #Compute sorting error on example ii
+ sorting_error[ii] = current_sorting_error - target_sorting_error
+
+ #Identity Update for Ranking Error
+ if FP_num > eps:
+ #For ii the update is the ranking error
+ fg_grad[ii] -= ranking_error[ii]
+ #For negatives, distribute error via ranking pmf (i.e. bg_relations/FP_num)
+ relevant_bg_grad += (bg_relations*(ranking_error[ii]/FP_num))
+
+ #Find the positives that are misranked (the cause of the error)
+ #These are the ones with smaller IoU but larger logits
+ missorted_examples = (~ iou_relations) * fg_relations
+
+ #Denominotor of sorting pmf
+ sorting_pmf_denom = torch.sum(missorted_examples)
+
+ #Identity Update for Sorting Error
+ if sorting_pmf_denom > eps:
+ #For ii the update is the sorting error
+ fg_grad[ii] -= sorting_error[ii]
+ #For positives, distribute error via sorting pmf (i.e. missorted_examples/sorting_pmf_denom)
+ fg_grad += (missorted_examples*(sorting_error[ii]/sorting_pmf_denom))
+
+ #Normalize gradients by number of positives
+ classification_grads[fg_labels]= (fg_grad/fg_num)
+ classification_grads[relevant_bg_labels]= (relevant_bg_grad/fg_num)
+
+ ctx.save_for_backward(classification_grads)
+
+ return ranking_error.mean(), sorting_error.mean()
+
+ @staticmethod
+ def backward(ctx, out_grad1, out_grad2):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None, None
+
+class aLRPLoss(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, regression_losses, delta=1., eps=1e-5):
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets == 1)
+ fg_logits = logits[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta
+
+ #Get valid bg logits
+ relevant_bg_labels=((targets==0)&(logits>=threshold_logit))
+ relevant_bg_logits=logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ rank=torch.zeros(fg_num).cuda()
+ prec=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ max_prec=0
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ #x_ij s as score differences with fgs
+ fg_relations=fg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with fgs
+ fg_relations=torch.clamp(fg_relations/(2*delta)+0.5,min=0,max=1)
+ #Discard i=j in the summation in rank_pos
+ fg_relations[ii]=0
+
+ #x_ij s as score differences with bgs
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with bgs
+ bg_relations=torch.clamp(bg_relations/(2*delta)+0.5,min=0,max=1)
+
+ #Compute the rank of the example within fgs and number of bgs with larger scores
+ rank_pos=1+torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+ #Store the total since it is normalizer also for aLRP Regression error
+ rank[ii]=rank_pos+FP_num
+
+ #Compute precision for this example to compute classification loss
+ prec[ii]=rank_pos/rank[ii]
+ #For stability, set eps to a infinitesmall value (e.g. 1e-6), then compute grads
+ if FP_num > eps:
+ fg_grad[ii] = -(torch.sum(fg_relations*regression_losses)+FP_num)/rank[ii]
+ relevant_bg_grad += (bg_relations*(-fg_grad[ii]/FP_num))
+
+ #aLRP with grad formulation fg gradient
+ classification_grads[fg_labels]= fg_grad
+ #aLRP with grad formulation bg gradient
+ classification_grads[relevant_bg_labels]= relevant_bg_grad
+
+ classification_grads /= (fg_num)
+
+ cls_loss=1-prec.mean()
+ ctx.save_for_backward(classification_grads)
+
+ return cls_loss, rank, order
+
+ @staticmethod
+ def backward(ctx, out_grad1, out_grad2, out_grad3):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None, None, None
+
+
+class APLoss(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, delta=1.):
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets == 1)
+ fg_logits = logits[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta
+
+ #Get valid bg logits
+ relevant_bg_labels=((targets==0)&(logits>=threshold_logit))
+ relevant_bg_logits=logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ rank=torch.zeros(fg_num).cuda()
+ prec=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ max_prec=0
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ #x_ij s as score differences with fgs
+ fg_relations=fg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with fgs
+ fg_relations=torch.clamp(fg_relations/(2*delta)+0.5,min=0,max=1)
+ #Discard i=j in the summation in rank_pos
+ fg_relations[ii]=0
+
+ #x_ij s as score differences with bgs
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with bgs
+ bg_relations=torch.clamp(bg_relations/(2*delta)+0.5,min=0,max=1)
+
+ #Compute the rank of the example within fgs and number of bgs with larger scores
+ rank_pos=1+torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+ #Store the total since it is normalizer also for aLRP Regression error
+ rank[ii]=rank_pos+FP_num
+
+ #Compute precision for this example
+ current_prec=rank_pos/rank[ii]
+
+ #Compute interpolated AP and store gradients for relevant bg examples
+ if (max_prec<=current_prec):
+ max_prec=current_prec
+ relevant_bg_grad += (bg_relations/rank[ii])
+ else:
+ relevant_bg_grad += (bg_relations/rank[ii])*(((1-max_prec)/(1-current_prec)))
+
+ #Store fg gradients
+ fg_grad[ii]=-(1-max_prec)
+ prec[ii]=max_prec
+
+ #aLRP with grad formulation fg gradient
+ classification_grads[fg_labels]= fg_grad
+ #aLRP with grad formulation bg gradient
+ classification_grads[relevant_bg_labels]= relevant_bg_grad
+
+ classification_grads /= fg_num
+
+ cls_loss=1-prec.mean()
+ ctx.save_for_backward(classification_grads)
+
+ return cls_loss
+
+ @staticmethod
+ def backward(ctx, out_grad1):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLoss, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ #self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.1, .05]) # P3-P7
+ #self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.5, 0.4, .1]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), tcls[i]] = self.cp
+ #t[t==self.cp] = iou.detach().clamp(0).type(t.dtype)
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch = [], [], [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+
+ return tcls, tbox, indices, anch
+
+
+class ComputeLossOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p, targets, imgs)
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p]
+
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ #pxy = ps[:, :2].sigmoid() * 3. - 1.
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ #indices, anch = self.find_positive(p, targets)
+ indices, anch = self.find_3_positive(p, targets)
+ #indices, anch = self.find_4_positive(p, targets)
+ #indices, anch = self.find_5_positive(p, targets)
+ #indices, anch = self.find_9_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(10, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+
+class ComputeLossBinOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossBinOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+ #MSEangle = nn.MSELoss().to(device)
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride', 'bin_count':
+ setattr(self, k, getattr(det, k))
+
+ #xy_bin_sigmoid = SigmoidBin(bin_count=11, min=-0.5, max=1.5, use_loss_regression=False).to(device)
+ wh_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0, use_loss_regression=False).to(device)
+ #angle_bin_sigmoid = SigmoidBin(bin_count=31, min=-1.1, max=1.1, use_loss_regression=False).to(device)
+ self.wh_bin_sigmoid = wh_bin_sigmoid
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p, targets, imgs)
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p]
+
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ obj_idx = self.wh_bin_sigmoid.get_length()*2 + 2 # x,y, w-bce, h-bce # xy_bin_sigmoid.get_length()*2
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+
+ #pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ ##pxy = ps[:, :2].sigmoid() * 3. - 1.
+ #pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ #pbox = torch.cat((pxy, pwh), 1) # predicted box
+
+ #x_loss, px = xy_bin_sigmoid.training_loss(ps[..., 0:12], tbox[i][..., 0])
+ #y_loss, py = xy_bin_sigmoid.training_loss(ps[..., 12:24], tbox[i][..., 1])
+ w_loss, pw = self.wh_bin_sigmoid.training_loss(ps[..., 2:(3+self.bin_count)], selected_tbox[..., 2] / anchors[i][..., 0])
+ h_loss, ph = self.wh_bin_sigmoid.training_loss(ps[..., (3+self.bin_count):obj_idx], selected_tbox[..., 3] / anchors[i][..., 1])
+
+ pw *= anchors[i][..., 0]
+ ph *= anchors[i][..., 1]
+
+ px = ps[:, 0].sigmoid() * 2. - 0.5
+ py = ps[:, 1].sigmoid() * 2. - 0.5
+
+ lbox += w_loss + h_loss # + x_loss + y_loss
+
+ #print(f"\n px = {px.shape}, py = {py.shape}, pw = {pw.shape}, ph = {ph.shape} \n")
+
+ pbox = torch.cat((px.unsqueeze(1), py.unsqueeze(1), pw.unsqueeze(1), ph.unsqueeze(1)), 1).to(device) # predicted box
+
+
+
+
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, (1+obj_idx):], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, (1+obj_idx):], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., obj_idx], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ #indices, anch = self.find_positive(p, targets)
+ indices, anch = self.find_3_positive(p, targets)
+ #indices, anch = self.find_4_positive(p, targets)
+ #indices, anch = self.find_5_positive(p, targets)
+ #indices, anch = self.find_9_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ obj_idx = self.wh_bin_sigmoid.get_length()*2 + 2
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, obj_idx:(obj_idx+1)])
+ p_cls.append(fg_pred[:, (obj_idx+1):])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pw = self.wh_bin_sigmoid.forward(fg_pred[..., 2:(3+self.bin_count)].sigmoid()) * anch[i][idx][:, 0] * self.stride[i]
+ ph = self.wh_bin_sigmoid.forward(fg_pred[..., (3+self.bin_count):obj_idx].sigmoid()) * anch[i][idx][:, 1] * self.stride[i]
+
+ pxywh = torch.cat([pxy, pw.unsqueeze(1), ph.unsqueeze(1)], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(10, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+
+class ComputeLossAuxOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossAuxOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs_aux, as_aux_, gjs_aux, gis_aux, targets_aux, anchors_aux = self.build_targets2(p[:self.nl], targets, imgs)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p[:self.nl], targets, imgs)
+ pre_gen_gains_aux = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p[:self.nl]]
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p[:self.nl]]
+
+
+ # Losses
+ for i in range(self.nl): # layer index, layer predictions
+ pi = p[i]
+ pi_aux = p[i+self.nl]
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ b_aux, a_aux, gj_aux, gi_aux = bs_aux[i], as_aux_[i], gjs_aux[i], gis_aux[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+ tobj_aux = torch.zeros_like(pi_aux[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ n_aux = b_aux.shape[0] # number of targets
+ if n_aux:
+ ps_aux = pi_aux[b_aux, a_aux, gj_aux, gi_aux] # prediction subset corresponding to targets
+ grid_aux = torch.stack([gi_aux, gj_aux], dim=1)
+ pxy_aux = ps_aux[:, :2].sigmoid() * 2. - 0.5
+ #pxy_aux = ps_aux[:, :2].sigmoid() * 3. - 1.
+ pwh_aux = (ps_aux[:, 2:4].sigmoid() * 2) ** 2 * anchors_aux[i]
+ pbox_aux = torch.cat((pxy_aux, pwh_aux), 1) # predicted box
+ selected_tbox_aux = targets_aux[i][:, 2:6] * pre_gen_gains_aux[i]
+ selected_tbox_aux[:, :2] -= grid_aux
+ iou_aux = bbox_iou(pbox_aux.T, selected_tbox_aux, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += 0.25 * (1.0 - iou_aux).mean() # iou loss
+
+ # Objectness
+ tobj_aux[b_aux, a_aux, gj_aux, gi_aux] = (1.0 - self.gr) + self.gr * iou_aux.detach().clamp(0).type(tobj_aux.dtype) # iou ratio
+
+ # Classification
+ selected_tcls_aux = targets_aux[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t_aux = torch.full_like(ps_aux[:, 5:], self.cn, device=device) # targets
+ t_aux[range(n_aux), selected_tcls_aux] = self.cp
+ lcls += 0.25 * self.BCEcls(ps_aux[:, 5:], t_aux) # BCE
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ obji_aux = self.BCEobj(pi_aux[..., 4], tobj_aux)
+ lobj += obji * self.balance[i] + 0.25 * obji_aux * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ indices, anch = self.find_3_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(20, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def build_targets2(self, p, targets, imgs):
+
+ indices, anch = self.find_5_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(20, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_5_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 1.0 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/metrics.py b/oneAPI_ODAV_APP/ENGINES/utils/metrics.py
new file mode 100644
index 000000000..180e33e3b
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/metrics.py
@@ -0,0 +1,228 @@
+# Model validation metrics
+
+from pathlib import Path
+
+import matplotlib.pyplot as plt
+import numpy as np
+import torch
+
+from . import general
+
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
+ return (x[:, :4] * w).sum(1)
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, v5_metric=False, plot=False, save_dir='.', names=()):
+ """ Compute the average precision, given the recall and precision curves.
+ Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
+ # Arguments
+ tp: True positives (nparray, nx1 or nx10).
+ conf: Objectness value from 0-1 (nparray).
+ pred_cls: Predicted object classes (nparray).
+ target_cls: True object classes (nparray).
+ plot: Plot precision-recall curve at mAP@0.5
+ save_dir: Plot save directory
+ # Returns
+ The average precision as computed in py-faster-rcnn.
+ """
+
+ # Sort by objectness
+ i = np.argsort(-conf)
+ tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
+
+ # Find unique classes
+ unique_classes = np.unique(target_cls)
+ nc = unique_classes.shape[0] # number of classes, number of detections
+
+ # Create Precision-Recall curve and compute AP for each class
+ px, py = np.linspace(0, 1, 1000), [] # for plotting
+ ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
+ for ci, c in enumerate(unique_classes):
+ i = pred_cls == c
+ n_l = (target_cls == c).sum() # number of labels
+ n_p = i.sum() # number of predictions
+
+ if n_p == 0 or n_l == 0:
+ continue
+ else:
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + 1e-16) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j], v5_metric=v5_metric)
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+
+ # Compute F1 (harmonic mean of precision and recall)
+ f1 = 2 * p * r / (p + r + 1e-16)
+ if plot:
+ plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
+
+ i = f1.mean(0).argmax() # max F1 index
+ return p[:, i], r[:, i], ap, f1[:, i], unique_classes.astype('int32')
+
+
+def compute_ap(recall, precision, v5_metric=False):
+ """ Compute the average precision, given the recall and precision curves
+ # Arguments
+ recall: The recall curve (list)
+ precision: The precision curve (list)
+ v5_metric: Assume maximum recall to be 1.0, as in YOLOv5, MMDetetion etc.
+ # Returns
+ Average precision, precision curve, recall curve
+ """
+
+ # Append sentinel values to beginning and end
+ if v5_metric: # New YOLOv5 metric, same as MMDetection and Detectron2 repositories
+ mrec = np.concatenate(([0.], recall, [1.0]))
+ else: # Old YOLOv5 metric, i.e. default YOLOv7 metric
+ mrec = np.concatenate(([0.], recall, [recall[-1] + 0.01]))
+ mpre = np.concatenate(([1.], precision, [0.]))
+
+ # Compute the precision envelope
+ mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
+
+ # Integrate area under curve
+ method = 'interp' # methods: 'continuous', 'interp'
+ if method == 'interp':
+ x = np.linspace(0, 1, 101) # 101-point interp (COCO)
+ ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
+ else: # 'continuous'
+ i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
+ ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
+
+ return ap, mpre, mrec
+
+
+class ConfusionMatrix:
+ # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
+ def __init__(self, nc, conf=0.25, iou_thres=0.45):
+ self.matrix = np.zeros((nc + 1, nc + 1))
+ self.nc = nc # number of classes
+ self.conf = conf
+ self.iou_thres = iou_thres
+
+ def process_batch(self, detections, labels):
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ None, updates confusion matrix accordingly
+ """
+ detections = detections[detections[:, 4] > self.conf]
+ gt_classes = labels[:, 0].int()
+ detection_classes = detections[:, 5].int()
+ iou = general.box_iou(labels[:, 1:], detections[:, :4])
+
+ x = torch.where(iou > self.iou_thres)
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ else:
+ matches = np.zeros((0, 3))
+
+ n = matches.shape[0] > 0
+ m0, m1, _ = matches.transpose().astype(np.int16)
+ for i, gc in enumerate(gt_classes):
+ j = m0 == i
+ if n and sum(j) == 1:
+ self.matrix[gc, detection_classes[m1[j]]] += 1 # correct
+ else:
+ self.matrix[self.nc, gc] += 1 # background FP
+
+ if n:
+ for i, dc in enumerate(detection_classes):
+ if not any(m1 == i):
+ self.matrix[dc, self.nc] += 1 # background FN
+
+ def matrix(self):
+ return self.matrix
+
+ def plot(self, save_dir='', names=()):
+ try:
+ import seaborn as sn
+
+ array = self.matrix / (self.matrix.sum(0).reshape(1, self.nc + 1) + 1E-6) # normalize
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig = plt.figure(figsize=(12, 9), tight_layout=True)
+ sn.set(font_scale=1.0 if self.nc < 50 else 0.8) # for label size
+ labels = (0 < len(names) < 99) and len(names) == self.nc # apply names to ticklabels
+ sn.heatmap(array, annot=self.nc < 30, annot_kws={"size": 8}, cmap='Blues', fmt='.2f', square=True,
+ xticklabels=names + ['background FP'] if labels else "auto",
+ yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
+ fig.axes[0].set_xlabel('True')
+ fig.axes[0].set_ylabel('Predicted')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ except Exception as e:
+ pass
+
+ def print(self):
+ for i in range(self.nc + 1):
+ print(' '.join(map(str, self.matrix[i])))
+
+
+# Plots ----------------------------------------------------------------------------------------------------------------
+
+def plot_pr_curve(px, py, ap, save_dir='pr_curve.png', names=()):
+ # Precision-recall curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+ py = np.stack(py, axis=1)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py.T):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)
+ else:
+ ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)
+
+ ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())
+ ax.set_xlabel('Recall')
+ ax.set_ylabel('Precision')
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
+
+
+def plot_mc_curve(px, py, save_dir='mc_curve.png', names=(), xlabel='Confidence', ylabel='Metric'):
+ # Metric-confidence curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)
+ else:
+ ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
+
+ y = py.mean(0)
+ ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
+ ax.set_xlabel(xlabel)
+ ax.set_ylabel(ylabel)
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/plots.py b/oneAPI_ODAV_APP/ENGINES/utils/plots.py
new file mode 100644
index 000000000..0a1c5f311
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/plots.py
@@ -0,0 +1,490 @@
+# Plotting utils
+
+import glob
+import math
+import os
+import random
+from copy import copy
+from pathlib import Path
+
+import cv2
+import matplotlib
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import seaborn as sns
+import torch
+import yaml
+from PIL import Image, ImageDraw, ImageFont
+from scipy.signal import butter, filtfilt
+
+from utils.general import xywh2xyxy, xyxy2xywh
+from utils.metrics import fitness
+
+
+# Settings
+matplotlib.rc('font', **{'size': 11})
+matplotlib.use('Agg') # for writing to files only
+
+
+def color_list():
+ # Return first 10 plt colors as (r,g,b) https://stackoverflow.com/questions/51350872/python-from-color-name-to-rgb
+ def hex2rgb(h):
+ return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))
+
+ return [hex2rgb(h) for h in matplotlib.colors.TABLEAU_COLORS.values()] # or BASE_ (8), CSS4_ (148), XKCD_ (949)
+
+
+def hist2d(x, y, n=100):
+ # 2d histogram used in labels.png and evolve.png
+ xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
+ hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
+ xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
+ yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
+ return np.log(hist[xidx, yidx])
+
+
+def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
+ # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
+ def butter_lowpass(cutoff, fs, order):
+ nyq = 0.5 * fs
+ normal_cutoff = cutoff / nyq
+ return butter(order, normal_cutoff, btype='low', analog=False)
+
+ b, a = butter_lowpass(cutoff, fs, order=order)
+ return filtfilt(b, a, data) # forward-backward filter
+
+
+def plot_one_box(x, img, color=None, label=None, line_thickness=3):
+ # Plots one bounding box on image img
+ tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
+ color = color or [random.randint(0, 255) for _ in range(3)]
+ c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
+ cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
+ if label:
+ tf = max(tl - 1, 1) # font thickness
+ t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
+ c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
+ cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
+ cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
+
+
+def plot_one_box_PIL(box, img, color=None, label=None, line_thickness=None):
+ img = Image.fromarray(img)
+ draw = ImageDraw.Draw(img)
+ line_thickness = line_thickness or max(int(min(img.size) / 200), 2)
+ draw.rectangle(box, width=line_thickness, outline=tuple(color)) # plot
+ if label:
+ fontsize = max(round(max(img.size) / 40), 12)
+ font = ImageFont.truetype("Arial.ttf", fontsize)
+ txt_width, txt_height = font.getsize(label)
+ draw.rectangle([box[0], box[1] - txt_height + 4, box[0] + txt_width, box[1]], fill=tuple(color))
+ draw.text((box[0], box[1] - txt_height + 1), label, fill=(255, 255, 255), font=font)
+ return np.asarray(img)
+
+
+def plot_wh_methods(): # from utils.plots import *; plot_wh_methods()
+ # Compares the two methods for width-height anchor multiplication
+ # https://github.com/ultralytics/yolov3/issues/168
+ x = np.arange(-4.0, 4.0, .1)
+ ya = np.exp(x)
+ yb = torch.sigmoid(torch.from_numpy(x)).numpy() * 2
+
+ fig = plt.figure(figsize=(6, 3), tight_layout=True)
+ plt.plot(x, ya, '.-', label='YOLOv3')
+ plt.plot(x, yb ** 2, '.-', label='YOLOR ^2')
+ plt.plot(x, yb ** 1.6, '.-', label='YOLOR ^1.6')
+ plt.xlim(left=-4, right=4)
+ plt.ylim(bottom=0, top=6)
+ plt.xlabel('input')
+ plt.ylabel('output')
+ plt.grid()
+ plt.legend()
+ fig.savefig('comparison.png', dpi=200)
+
+
+def output_to_target(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ for *box, conf, cls in o.cpu().numpy():
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])
+ return np.array(targets)
+
+
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=640, max_subplots=16):
+ # Plot image grid with labels
+
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+
+ # un-normalise
+ if np.max(images[0]) <= 1:
+ images *= 255
+
+ tl = 3 # line thickness
+ tf = max(tl - 1, 1) # font thickness
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+
+ # Check if we should resize
+ scale_factor = max_size / max(h, w)
+ if scale_factor < 1:
+ h = math.ceil(scale_factor * h)
+ w = math.ceil(scale_factor * w)
+
+ colors = color_list() # list of colors
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, img in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+
+ block_x = int(w * (i // ns))
+ block_y = int(h * (i % ns))
+
+ img = img.transpose(1, 2, 0)
+ if scale_factor < 1:
+ img = cv2.resize(img, (w, h))
+
+ mosaic[block_y:block_y + h, block_x:block_x + w, :] = img
+ if len(targets) > 0:
+ image_targets = targets[targets[:, 0] == i]
+ boxes = xywh2xyxy(image_targets[:, 2:6]).T
+ classes = image_targets[:, 1].astype('int')
+ labels = image_targets.shape[1] == 6 # labels if no conf column
+ conf = None if labels else image_targets[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale_factor < 1: # absolute coords need scale if image scales
+ boxes *= scale_factor
+ boxes[[0, 2]] += block_x
+ boxes[[1, 3]] += block_y
+ for j, box in enumerate(boxes.T):
+ cls = int(classes[j])
+ color = colors[cls % len(colors)]
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = '%s' % cls if labels else '%s %.1f' % (cls, conf[j])
+ plot_one_box(box, mosaic, label=label, color=color, line_thickness=tl)
+
+ # Draw image filename labels
+ if paths:
+ label = Path(paths[i]).name[:40] # trim to 40 char
+ t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
+ cv2.putText(mosaic, label, (block_x + 5, block_y + t_size[1] + 5), 0, tl / 3, [220, 220, 220], thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ # Image border
+ cv2.rectangle(mosaic, (block_x, block_y), (block_x + w, block_y + h), (255, 255, 255), thickness=3)
+
+ if fname:
+ r = min(1280. / max(h, w) / ns, 1.0) # ratio to limit image size
+ mosaic = cv2.resize(mosaic, (int(ns * w * r), int(ns * h * r)), interpolation=cv2.INTER_AREA)
+ # cv2.imwrite(fname, cv2.cvtColor(mosaic, cv2.COLOR_BGR2RGB)) # cv2 save
+ Image.fromarray(mosaic).save(fname) # PIL save
+ return mosaic
+
+
+def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):
+ # Plot LR simulating training for full epochs
+ optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
+ y = []
+ for _ in range(epochs):
+ scheduler.step()
+ y.append(optimizer.param_groups[0]['lr'])
+ plt.plot(y, '.-', label='LR')
+ plt.xlabel('epoch')
+ plt.ylabel('LR')
+ plt.grid()
+ plt.xlim(0, epochs)
+ plt.ylim(0)
+ plt.savefig(Path(save_dir) / 'LR.png', dpi=200)
+ plt.close()
+
+
+def plot_test_txt(): # from utils.plots import *; plot_test()
+ # Plot test.txt histograms
+ x = np.loadtxt('test.txt', dtype=np.float32)
+ box = xyxy2xywh(x[:, :4])
+ cx, cy = box[:, 0], box[:, 1]
+
+ fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
+ ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
+ ax.set_aspect('equal')
+ plt.savefig('hist2d.png', dpi=300)
+
+ fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
+ ax[0].hist(cx, bins=600)
+ ax[1].hist(cy, bins=600)
+ plt.savefig('hist1d.png', dpi=200)
+
+
+def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
+ # Plot targets.txt histograms
+ x = np.loadtxt('targets.txt', dtype=np.float32).T
+ s = ['x targets', 'y targets', 'width targets', 'height targets']
+ fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(4):
+ ax[i].hist(x[i], bins=100, label='%.3g +/- %.3g' % (x[i].mean(), x[i].std()))
+ ax[i].legend()
+ ax[i].set_title(s[i])
+ plt.savefig('targets.jpg', dpi=200)
+
+
+def plot_study_txt(path='', x=None): # from utils.plots import *; plot_study_txt()
+ # Plot study.txt generated by test.py
+ fig, ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)
+ # ax = ax.ravel()
+
+ fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
+ # for f in [Path(path) / f'study_coco_{x}.txt' for x in ['yolor-p6', 'yolor-w6', 'yolor-e6', 'yolor-d6']]:
+ for f in sorted(Path(path).glob('study*.txt')):
+ y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
+ x = np.arange(y.shape[1]) if x is None else np.array(x)
+ s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_inference (ms/img)', 't_NMS (ms/img)', 't_total (ms/img)']
+ # for i in range(7):
+ # ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)
+ # ax[i].set_title(s[i])
+
+ j = y[3].argmax() + 1
+ ax2.plot(y[6, 1:j], y[3, 1:j] * 1E2, '.-', linewidth=2, markersize=8,
+ label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
+
+ ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
+ 'k.-', linewidth=2, markersize=8, alpha=.25, label='EfficientDet')
+
+ ax2.grid(alpha=0.2)
+ ax2.set_yticks(np.arange(20, 60, 5))
+ ax2.set_xlim(0, 57)
+ ax2.set_ylim(30, 55)
+ ax2.set_xlabel('GPU Speed (ms/img)')
+ ax2.set_ylabel('COCO AP val')
+ ax2.legend(loc='lower right')
+ plt.savefig(str(Path(path).name) + '.png', dpi=300)
+
+
+def plot_labels(labels, names=(), save_dir=Path(''), loggers=None):
+ # plot dataset labels
+ print('Plotting labels... ')
+ c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
+ nc = int(c.max() + 1) # number of classes
+ colors = color_list()
+ x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])
+
+ # seaborn correlogram
+ sns.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
+ plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)
+ plt.close()
+
+ # matplotlib labels
+ matplotlib.use('svg') # faster
+ ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
+ ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
+ ax[0].set_ylabel('instances')
+ if 0 < len(names) < 30:
+ ax[0].set_xticks(range(len(names)))
+ ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ else:
+ ax[0].set_xlabel('classes')
+ sns.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
+ sns.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)
+
+ # rectangles
+ labels[:, 1:3] = 0.5 # center
+ labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
+ img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
+ for cls, *box in labels[:1000]:
+ ImageDraw.Draw(img).rectangle(box, width=1, outline=colors[int(cls) % 10]) # plot
+ ax[1].imshow(img)
+ ax[1].axis('off')
+
+ for a in [0, 1, 2, 3]:
+ for s in ['top', 'right', 'left', 'bottom']:
+ ax[a].spines[s].set_visible(False)
+
+ plt.savefig(save_dir / 'labels.jpg', dpi=200)
+ matplotlib.use('Agg')
+ plt.close()
+
+ # loggers
+ for k, v in loggers.items() or {}:
+ if k == 'wandb' and v:
+ v.log({"Labels": [v.Image(str(x), caption=x.name) for x in save_dir.glob('*labels*.jpg')]}, commit=False)
+
+
+def plot_evolution(yaml_file='data/hyp.finetune.yaml'): # from utils.plots import *; plot_evolution()
+ # Plot hyperparameter evolution results in evolve.txt
+ with open(yaml_file) as f:
+ hyp = yaml.load(f, Loader=yaml.SafeLoader)
+ x = np.loadtxt('evolve.txt', ndmin=2)
+ f = fitness(x)
+ # weights = (f - f.min()) ** 2 # for weighted results
+ plt.figure(figsize=(10, 12), tight_layout=True)
+ matplotlib.rc('font', **{'size': 8})
+ for i, (k, v) in enumerate(hyp.items()):
+ y = x[:, i + 7]
+ # mu = (y * weights).sum() / weights.sum() # best weighted result
+ mu = y[f.argmax()] # best single result
+ plt.subplot(6, 5, i + 1)
+ plt.scatter(y, f, c=hist2d(y, f, 20), cmap='viridis', alpha=.8, edgecolors='none')
+ plt.plot(mu, f.max(), 'k+', markersize=15)
+ plt.title('%s = %.3g' % (k, mu), fontdict={'size': 9}) # limit to 40 characters
+ if i % 5 != 0:
+ plt.yticks([])
+ print('%15s: %.3g' % (k, mu))
+ plt.savefig('evolve.png', dpi=200)
+ print('\nPlot saved as evolve.png')
+
+
+def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
+ # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()
+ ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
+ s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']
+ files = list(Path(save_dir).glob('frames*.txt'))
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
+ n = results.shape[1] # number of rows
+ x = np.arange(start, min(stop, n) if stop else n)
+ results = results[:, x]
+ t = (results[0] - results[0].min()) # set t0=0s
+ results[0] = x
+ for i, a in enumerate(ax):
+ if i < len(results):
+ label = labels[fi] if len(labels) else f.stem.replace('frames_', '')
+ a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)
+ a.set_title(s[i])
+ a.set_xlabel('time (s)')
+ # if fi == len(files) - 1:
+ # a.set_ylim(bottom=0)
+ for side in ['top', 'right']:
+ a.spines[side].set_visible(False)
+ else:
+ a.remove()
+ except Exception as e:
+ print('Warning: Plotting error for %s; %s' % (f, e))
+
+ ax[1].legend()
+ plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
+
+
+def plot_results_overlay(start=0, stop=0): # from utils.plots import *; plot_results_overlay()
+ # Plot training 'results*.txt', overlaying train and val losses
+ s = ['train', 'train', 'train', 'Precision', 'mAP@0.5', 'val', 'val', 'val', 'Recall', 'mAP@0.5:0.95'] # legends
+ t = ['Box', 'Objectness', 'Classification', 'P-R', 'mAP-F1'] # titles
+ for f in sorted(glob.glob('results*.txt') + glob.glob('../../Downloads/results*.txt')):
+ results = np.loadtxt(f, usecols=[2, 3, 4, 8, 9, 12, 13, 14, 10, 11], ndmin=2).T
+ n = results.shape[1] # number of rows
+ x = range(start, min(stop, n) if stop else n)
+ fig, ax = plt.subplots(1, 5, figsize=(14, 3.5), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(5):
+ for j in [i, i + 5]:
+ y = results[j, x]
+ ax[i].plot(x, y, marker='.', label=s[j])
+ # y_smooth = butter_lowpass_filtfilt(y)
+ # ax[i].plot(x, np.gradient(y_smooth), marker='.', label=s[j])
+
+ ax[i].set_title(t[i])
+ ax[i].legend()
+ ax[i].set_ylabel(f) if i == 0 else None # add filename
+ fig.savefig(f.replace('.txt', '.png'), dpi=200)
+
+
+def plot_results(start=0, stop=0, bucket='', id=(), labels=(), save_dir=''):
+ # Plot training 'results*.txt'. from utils.plots import *; plot_results(save_dir='runs/train/exp')
+ fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
+ ax = ax.ravel()
+ s = ['Box', 'Objectness', 'Classification', 'Precision', 'Recall',
+ 'val Box', 'val Objectness', 'val Classification', 'mAP@0.5', 'mAP@0.5:0.95']
+ if bucket:
+ # files = ['https://storage.googleapis.com/%s/results%g.txt' % (bucket, x) for x in id]
+ files = ['results%g.txt' % x for x in id]
+ c = ('gsutil cp ' + '%s ' * len(files) + '.') % tuple('gs://%s/results%g.txt' % (bucket, x) for x in id)
+ os.system(c)
+ else:
+ files = list(Path(save_dir).glob('results*.txt'))
+ assert len(files), 'No results.txt files found in %s, nothing to plot.' % os.path.abspath(save_dir)
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, usecols=[2, 3, 4, 8, 9, 12, 13, 14, 10, 11], ndmin=2).T
+ n = results.shape[1] # number of rows
+ x = range(start, min(stop, n) if stop else n)
+ for i in range(10):
+ y = results[i, x]
+ if i in [0, 1, 2, 5, 6, 7]:
+ y[y == 0] = np.nan # don't show zero loss values
+ # y /= y[0] # normalize
+ label = labels[fi] if len(labels) else f.stem
+ ax[i].plot(x, y, marker='.', label=label, linewidth=2, markersize=8)
+ ax[i].set_title(s[i])
+ # if i in [5, 6, 7]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print('Warning: Plotting error for %s; %s' % (f, e))
+
+ ax[1].legend()
+ fig.savefig(Path(save_dir) / 'results.png', dpi=200)
+
+
+def output_to_keypoint(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ kpts = o[:,6:]
+ o = o[:,:6]
+ for index, (*box, conf, cls) in enumerate(o.detach().cpu().numpy()):
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf, *list(kpts.detach().cpu().numpy()[index])])
+ return np.array(targets)
+
+
+def plot_skeleton_kpts(im, kpts, steps, orig_shape=None):
+ #Plot the skeleton and keypointsfor coco datatset
+ palette = np.array([[255, 128, 0], [255, 153, 51], [255, 178, 102],
+ [230, 230, 0], [255, 153, 255], [153, 204, 255],
+ [255, 102, 255], [255, 51, 255], [102, 178, 255],
+ [51, 153, 255], [255, 153, 153], [255, 102, 102],
+ [255, 51, 51], [153, 255, 153], [102, 255, 102],
+ [51, 255, 51], [0, 255, 0], [0, 0, 255], [255, 0, 0],
+ [255, 255, 255]])
+
+ skeleton = [[16, 14], [14, 12], [17, 15], [15, 13], [12, 13], [6, 12],
+ [7, 13], [6, 7], [6, 8], [7, 9], [8, 10], [9, 11], [2, 3],
+ [1, 2], [1, 3], [2, 4], [3, 5], [4, 6], [5, 7]]
+
+ pose_limb_color = palette[[9, 9, 9, 9, 7, 7, 7, 0, 0, 0, 0, 0, 16, 16, 16, 16, 16, 16, 16]]
+ pose_kpt_color = palette[[16, 16, 16, 16, 16, 0, 0, 0, 0, 0, 0, 9, 9, 9, 9, 9, 9]]
+ radius = 5
+ num_kpts = len(kpts) // steps
+
+ for kid in range(num_kpts):
+ r, g, b = pose_kpt_color[kid]
+ x_coord, y_coord = kpts[steps * kid], kpts[steps * kid + 1]
+ if not (x_coord % 640 == 0 or y_coord % 640 == 0):
+ if steps == 3:
+ conf = kpts[steps * kid + 2]
+ if conf < 0.5:
+ continue
+ cv2.circle(im, (int(x_coord), int(y_coord)), radius, (int(r), int(g), int(b)), -1)
+
+ for sk_id, sk in enumerate(skeleton):
+ r, g, b = pose_limb_color[sk_id]
+ pos1 = (int(kpts[(sk[0]-1)*steps]), int(kpts[(sk[0]-1)*steps+1]))
+ pos2 = (int(kpts[(sk[1]-1)*steps]), int(kpts[(sk[1]-1)*steps+1]))
+ if steps == 3:
+ conf1 = kpts[(sk[0]-1)*steps+2]
+ conf2 = kpts[(sk[1]-1)*steps+2]
+ if conf1<0.5 or conf2<0.5:
+ continue
+ if pos1[0]%640 == 0 or pos1[1]%640==0 or pos1[0]<0 or pos1[1]<0:
+ continue
+ if pos2[0] % 640 == 0 or pos2[1] % 640 == 0 or pos2[0]<0 or pos2[1]<0:
+ continue
+ cv2.line(im, pos1, pos2, (int(r), int(g), int(b)), thickness=2)
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/torch_utils.py b/oneAPI_ODAV_APP/ENGINES/utils/torch_utils.py
new file mode 100644
index 000000000..311884e43
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/torch_utils.py
@@ -0,0 +1,375 @@
+# YOLOR PyTorch utils
+
+import datetime
+import logging
+import math
+import os
+import platform
+import subprocess
+import time
+from contextlib import contextmanager
+from copy import deepcopy
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+import torch.nn as nn
+import torch.nn.functional as F
+import torchvision
+
+
+try:
+ import thop # for FLOPS computation
+except ImportError:
+ thop = None
+logger = logging.getLogger(__name__)
+
+
+@contextmanager
+def torch_distributed_zero_first(local_rank: int):
+ """
+ Decorator to make all processes in distributed training wait for each local_master to do something.
+ """
+ if local_rank not in [-1, 0]:
+ torch.distributed.barrier()
+ yield
+ if local_rank == 0:
+ torch.distributed.barrier()
+
+
+def init_torch_seeds(seed=0):
+ # Speed-reproducibility tradeoff https://pytorch.org/docs/stable/notes/randomness.html
+ torch.manual_seed(seed)
+ if seed == 0: # slower, more reproducible
+ cudnn.benchmark, cudnn.deterministic = False, True
+ else: # faster, less reproducible
+ cudnn.benchmark, cudnn.deterministic = True, False
+
+
+def date_modified(path=__file__):
+ # return human-readable file modification date, i.e. '2021-3-26'
+ t = datetime.datetime.fromtimestamp(Path(path).stat().st_mtime)
+ return f'{t.year}-{t.month}-{t.day}'
+
+
+def git_describe(path=Path(__file__).parent): # path must be a directory
+ # return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
+ s = f'git -C {path} describe --tags --long --always'
+ try:
+ return subprocess.check_output(s, shell=True, stderr=subprocess.STDOUT).decode()[:-1]
+ except subprocess.CalledProcessError as e:
+ return '' # not a git repository
+
+
+def select_device(device='', batch_size=None):
+ # device = 'cpu' or '0' or '0,1,2,3'
+ s = f'YOLOR 🚀 {git_describe() or date_modified()} torch {torch.__version__} ' # string
+ cpu = device.lower() == 'cpu'
+ if cpu:
+ os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
+ elif device: # non-cpu device requested
+ os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable
+ assert torch.cuda.is_available(), f'CUDA unavailable, invalid device {device} requested' # check availability
+
+ cuda = not cpu and torch.cuda.is_available()
+ if cuda:
+ n = torch.cuda.device_count()
+ if n > 1 and batch_size: # check that batch_size is compatible with device_count
+ assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
+ space = ' ' * len(s)
+ for i, d in enumerate(device.split(',') if device else range(n)):
+ p = torch.cuda.get_device_properties(i)
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / 1024 ** 2}MB)\n" # bytes to MB
+ else:
+ s += 'CPU\n'
+
+ logger.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe
+ return torch.device('cuda:0' if cuda else 'cpu')
+
+
+def time_synchronized():
+ # pytorch-accurate time
+ if torch.cuda.is_available():
+ torch.cuda.synchronize()
+ return time.time()
+
+
+def profile(x, ops, n=100, device=None):
+ # profile a pytorch module or list of modules. Example usage:
+ # x = torch.randn(16, 3, 640, 640) # input
+ # m1 = lambda x: x * torch.sigmoid(x)
+ # m2 = nn.SiLU()
+ # profile(x, [m1, m2], n=100) # profile speed over 100 iterations
+
+ device = device or torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
+ x = x.to(device)
+ x.requires_grad = True
+ print(torch.__version__, device.type, torch.cuda.get_device_properties(0) if device.type == 'cuda' else '')
+ print(f"\n{'Params':>12s}{'GFLOPS':>12s}{'forward (ms)':>16s}{'backward (ms)':>16s}{'input':>24s}{'output':>24s}")
+ for m in ops if isinstance(ops, list) else [ops]:
+ m = m.to(device) if hasattr(m, 'to') else m # device
+ m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m # type
+ dtf, dtb, t = 0., 0., [0., 0., 0.] # dt forward, backward
+ try:
+ flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPS
+ except:
+ flops = 0
+
+ for _ in range(n):
+ t[0] = time_synchronized()
+ y = m(x)
+ t[1] = time_synchronized()
+ try:
+ _ = y.sum().backward()
+ t[2] = time_synchronized()
+ except: # no backward method
+ t[2] = float('nan')
+ dtf += (t[1] - t[0]) * 1000 / n # ms per op forward
+ dtb += (t[2] - t[1]) * 1000 / n # ms per op backward
+
+ s_in = tuple(x.shape) if isinstance(x, torch.Tensor) else 'list'
+ s_out = tuple(y.shape) if isinstance(y, torch.Tensor) else 'list'
+ p = sum(list(x.numel() for x in m.parameters())) if isinstance(m, nn.Module) else 0 # parameters
+ print(f'{p:12}{flops:12.4g}{dtf:16.4g}{dtb:16.4g}{str(s_in):>24s}{str(s_out):>24s}')
+
+
+def is_parallel(model):
+ return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
+
+
+def intersect_dicts(da, db, exclude=()):
+ # Dictionary intersection of matching keys and shapes, omitting 'exclude' keys, using da values
+ return {k: v for k, v in da.items() if k in db and not any(x in k for x in exclude) and v.shape == db[k].shape}
+
+
+def initialize_weights(model):
+ for m in model.modules():
+ t = type(m)
+ if t is nn.Conv2d:
+ pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
+ elif t is nn.BatchNorm2d:
+ m.eps = 1e-3
+ m.momentum = 0.03
+ elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6]:
+ m.inplace = True
+
+
+def find_modules(model, mclass=nn.Conv2d):
+ # Finds layer indices matching module class 'mclass'
+ return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
+
+
+def sparsity(model):
+ # Return global model sparsity
+ a, b = 0., 0.
+ for p in model.parameters():
+ a += p.numel()
+ b += (p == 0).sum()
+ return b / a
+
+
+def prune(model, amount=0.3):
+ # Prune model to requested global sparsity
+ import torch.nn.utils.prune as prune
+ print('Pruning model... ', end='')
+ for name, m in model.named_modules():
+ if isinstance(m, nn.Conv2d):
+ prune.l1_unstructured(m, name='weight', amount=amount) # prune
+ prune.remove(m, 'weight') # make permanent
+ print(' %.3g global sparsity' % sparsity(model))
+
+
+def fuse_conv_and_bn(conv, bn):
+ # Fuse convolution and batchnorm layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
+ fusedconv = nn.Conv2d(conv.in_channels,
+ conv.out_channels,
+ kernel_size=conv.kernel_size,
+ stride=conv.stride,
+ padding=conv.padding,
+ groups=conv.groups,
+ bias=True).requires_grad_(False).to(conv.weight.device)
+
+ # prepare filters
+ w_conv = conv.weight.clone().view(conv.out_channels, -1)
+ w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
+ fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
+
+ # prepare spatial bias
+ b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
+ b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
+ fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
+
+ return fusedconv
+
+
+def model_info(model, verbose=False, img_size=640):
+ # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
+ n_p = sum(x.numel() for x in model.parameters()) # number parameters
+ n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
+ if verbose:
+ print('%5s %40s %9s %12s %20s %10s %10s' % ('layer', 'name', 'gradient', 'parameters', 'shape', 'mu', 'sigma'))
+ for i, (name, p) in enumerate(model.named_parameters()):
+ name = name.replace('module_list.', '')
+ print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
+ (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
+
+ try: # FLOPS
+ from thop import profile
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32
+ img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input
+ flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPS
+ img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float
+ fs = ', %.1f GFLOPS' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPS
+ except (ImportError, Exception):
+ fs = ''
+
+ logger.info(f"Model Summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
+
+
+def load_classifier(name='resnet101', n=2):
+ # Loads a pretrained model reshaped to n-class output
+ model = torchvision.models.__dict__[name](pretrained=True)
+
+ # ResNet model properties
+ # input_size = [3, 224, 224]
+ # input_space = 'RGB'
+ # input_range = [0, 1]
+ # mean = [0.485, 0.456, 0.406]
+ # std = [0.229, 0.224, 0.225]
+
+ # Reshape output to n classes
+ filters = model.fc.weight.shape[1]
+ model.fc.bias = nn.Parameter(torch.zeros(n), requires_grad=True)
+ model.fc.weight = nn.Parameter(torch.zeros(n, filters), requires_grad=True)
+ model.fc.out_features = n
+ return model
+
+
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # scales img(bs,3,y,x) by ratio constrained to gs-multiple
+ if ratio == 1.0:
+ return img
+ else:
+ h, w = img.shape[2:]
+ s = (int(h * ratio), int(w * ratio)) # new size
+ img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
+ if not same_shape: # pad/crop img
+ h, w = [math.ceil(x * ratio / gs) * gs for x in (h, w)]
+ return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
+
+
+def copy_attr(a, b, include=(), exclude=()):
+ # Copy attributes from b to a, options to only include [...] and to exclude [...]
+ for k, v in b.__dict__.items():
+ if (len(include) and k not in include) or k.startswith('_') or k in exclude:
+ continue
+ else:
+ setattr(a, k, v)
+
+
+class ModelEMA:
+ """ Model Exponential Moving Average from https://github.com/rwightman/pytorch-image-models
+ Keep a moving average of everything in the model state_dict (parameters and buffers).
+ This is intended to allow functionality like
+ https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
+ A smoothed version of the weights is necessary for some training schemes to perform well.
+ This class is sensitive where it is initialized in the sequence of model init,
+ GPU assignment and distributed training wrappers.
+ """
+
+ def __init__(self, model, decay=0.9999, updates=0):
+ # Create EMA
+ self.ema = deepcopy(model.module if is_parallel(model) else model).eval() # FP32 EMA
+ # if next(model.parameters()).device.type != 'cpu':
+ # self.ema.half() # FP16 EMA
+ self.updates = updates # number of EMA updates
+ self.decay = lambda x: decay * (1 - math.exp(-x / 2000)) # decay exponential ramp (to help early epochs)
+ for p in self.ema.parameters():
+ p.requires_grad_(False)
+
+ def update(self, model):
+ # Update EMA parameters
+ with torch.no_grad():
+ self.updates += 1
+ d = self.decay(self.updates)
+
+ msd = model.module.state_dict() if is_parallel(model) else model.state_dict() # model state_dict
+ for k, v in self.ema.state_dict().items():
+ if v.dtype.is_floating_point:
+ v *= d
+ v += (1. - d) * msd[k].detach()
+
+ def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
+ # Update EMA attributes
+ copy_attr(self.ema, model, include, exclude)
+
+
+class BatchNormXd(torch.nn.modules.batchnorm._BatchNorm):
+ def _check_input_dim(self, input):
+ # The only difference between BatchNorm1d, BatchNorm2d, BatchNorm3d, etc
+ # is this method that is overwritten by the sub-class
+ # This original goal of this method was for tensor sanity checks
+ # If you're ok bypassing those sanity checks (eg. if you trust your inference
+ # to provide the right dimensional inputs), then you can just use this method
+ # for easy conversion from SyncBatchNorm
+ # (unfortunately, SyncBatchNorm does not store the original class - if it did
+ # we could return the one that was originally created)
+ return
+
+def revert_sync_batchnorm(module):
+ # this is very similar to the function that it is trying to revert:
+ # https://github.com/pytorch/pytorch/blob/c8b3686a3e4ba63dc59e5dcfe5db3430df256833/torch/nn/modules/batchnorm.py#L679
+ module_output = module
+ if isinstance(module, torch.nn.modules.batchnorm.SyncBatchNorm):
+ new_cls = BatchNormXd
+ module_output = BatchNormXd(module.num_features,
+ module.eps, module.momentum,
+ module.affine,
+ module.track_running_stats)
+ if module.affine:
+ with torch.no_grad():
+ module_output.weight = module.weight
+ module_output.bias = module.bias
+ module_output.running_mean = module.running_mean
+ module_output.running_var = module.running_var
+ module_output.num_batches_tracked = module.num_batches_tracked
+ if hasattr(module, "qconfig"):
+ module_output.qconfig = module.qconfig
+ for name, child in module.named_children():
+ module_output.add_module(name, revert_sync_batchnorm(child))
+ del module
+ return module_output
+
+
+class TracedModel(nn.Module):
+
+ def __init__(self, model=None, device=None, img_size=(640,640)):
+ super(TracedModel, self).__init__()
+
+ print(" Convert model to Traced-model... ")
+ self.stride = model.stride
+ self.names = model.names
+ self.model = model
+
+ self.model = revert_sync_batchnorm(self.model)
+ self.model.to('cpu')
+ self.model.eval()
+
+ self.detect_layer = self.model.model[-1]
+ self.model.traced = True
+
+ rand_example = torch.rand(1, 3, img_size, img_size)
+
+ traced_script_module = torch.jit.trace(self.model, rand_example, strict=False)
+ #traced_script_module = torch.jit.script(self.model)
+ traced_script_module.save("traced_model.pt")
+ print(" traced_script_module saved! ")
+ self.model = traced_script_module
+ self.model.to(device)
+ self.detect_layer.to(device)
+ print(" model is traced! \n")
+
+ def forward(self, x, augment=False, profile=False):
+ out = self.model(x)
+ out = self.detect_layer(out)
+ return out
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/__init__.py b/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/__init__.py
new file mode 100644
index 000000000..a6131c10e
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/__init__.py
@@ -0,0 +1 @@
+# init
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/log_dataset.py b/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/log_dataset.py
new file mode 100644
index 000000000..600598f3e
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/log_dataset.py
@@ -0,0 +1,25 @@
+import argparse
+
+import yaml
+
+
+from wandb_utils import WandbLogger
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ with open(opt.data) as f:
+ data = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ logger = WandbLogger(opt, '', None, data, job_type='Dataset Creation')
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOR', help='name of W&B Project')
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/wandb_utils.py b/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/wandb_utils.py
new file mode 100644
index 000000000..22eb58533
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/wandb_utils.py
@@ -0,0 +1,307 @@
+import json
+import sys
+from pathlib import Path
+
+
+import torch
+import yaml
+from tqdm import tqdm
+
+sys.path.append(str(Path(__file__).parent.parent.parent)) # add utils/ to path
+from utils.datasets import LoadImagesAndLabels
+from utils.datasets import img2label_paths
+from utils.general import colorstr, xywh2xyxy, check_dataset
+
+try:
+ import wandb
+ from wandb import init, finish
+except ImportError:
+ wandb = None
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):
+ return from_string[len(prefix):]
+
+
+def check_wandb_config_file(data_config_file):
+ wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path
+ if Path(wandb_config).is_file():
+ return wandb_config
+ return data_config_file
+
+
+def get_run_info(run_path):
+ run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))
+ run_id = run_path.stem
+ project = run_path.parent.stem
+ model_artifact_name = 'run_' + run_id + '_model'
+ return run_id, project, model_artifact_name
+
+
+def check_wandb_resume(opt):
+ process_wandb_config_ddp_mode(opt) if opt.global_rank not in [-1, 0] else None
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ if opt.global_rank not in [-1, 0]: # For resuming DDP runs
+ run_id, project, model_artifact_name = get_run_info(opt.resume)
+ api = wandb.Api()
+ artifact = api.artifact(project + '/' + model_artifact_name + ':latest')
+ modeldir = artifact.download()
+ opt.weights = str(Path(modeldir) / "last.pt")
+ return True
+ return None
+
+
+def process_wandb_config_ddp_mode(opt):
+ with open(opt.data) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ train_dir, val_dir = None, None
+ if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)
+ train_dir = train_artifact.download()
+ train_path = Path(train_dir) / 'data/images/'
+ data_dict['train'] = str(train_path)
+
+ if isinstance(data_dict['val'], str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ val_artifact = api.artifact(remove_prefix(data_dict['val']) + ':' + opt.artifact_alias)
+ val_dir = val_artifact.download()
+ val_path = Path(val_dir) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ if train_dir or val_dir:
+ ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')
+ with open(ddp_data_path, 'w') as f:
+ yaml.dump(data_dict, f)
+ opt.data = ddp_data_path
+
+
+class WandbLogger():
+ def __init__(self, opt, name, run_id, data_dict, job_type='Training'):
+ # Pre-training routine --
+ self.job_type = job_type
+ self.wandb, self.wandb_run, self.data_dict = wandb, None if not wandb else wandb.run, data_dict
+ # It's more elegant to stick to 1 wandb.init call, but useful config data is overwritten in the WandbLogger's wandb.init call
+ if isinstance(opt.resume, str): # checks resume from artifact
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ run_id, project, model_artifact_name = get_run_info(opt.resume)
+ model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name
+ assert wandb, 'install wandb to resume wandb runs'
+ # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config
+ self.wandb_run = wandb.init(id=run_id, project=project, resume='allow')
+ opt.resume = model_artifact_name
+ elif self.wandb:
+ self.wandb_run = wandb.init(config=opt,
+ resume="allow",
+ project='YOLOR' if opt.project == 'runs/train' else Path(opt.project).stem,
+ name=name,
+ job_type=job_type,
+ id=run_id) if not wandb.run else wandb.run
+ if self.wandb_run:
+ if self.job_type == 'Training':
+ if not opt.resume:
+ wandb_data_dict = self.check_and_upload_dataset(opt) if opt.upload_dataset else data_dict
+ # Info useful for resuming from artifacts
+ self.wandb_run.config.opt = vars(opt)
+ self.wandb_run.config.data_dict = wandb_data_dict
+ self.data_dict = self.setup_training(opt, data_dict)
+ if self.job_type == 'Dataset Creation':
+ self.data_dict = self.check_and_upload_dataset(opt)
+ else:
+ prefix = colorstr('wandb: ')
+ print(f"{prefix}Install Weights & Biases for YOLOR logging with 'pip install wandb' (recommended)")
+
+ def check_and_upload_dataset(self, opt):
+ assert wandb, 'Install wandb to upload dataset'
+ check_dataset(self.data_dict)
+ config_path = self.log_dataset_artifact(opt.data,
+ opt.single_cls,
+ 'YOLOR' if opt.project == 'runs/train' else Path(opt.project).stem)
+ print("Created dataset config file ", config_path)
+ with open(config_path) as f:
+ wandb_data_dict = yaml.load(f, Loader=yaml.SafeLoader)
+ return wandb_data_dict
+
+ def setup_training(self, opt, data_dict):
+ self.log_dict, self.current_epoch, self.log_imgs = {}, 0, 16 # Logging Constants
+ self.bbox_interval = opt.bbox_interval
+ if isinstance(opt.resume, str):
+ modeldir, _ = self.download_model_artifact(opt)
+ if modeldir:
+ self.weights = Path(modeldir) / "last.pt"
+ config = self.wandb_run.config
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp = str(
+ self.weights), config.save_period, config.total_batch_size, config.bbox_interval, config.epochs, \
+ config.opt['hyp']
+ data_dict = dict(self.wandb_run.config.data_dict) # eliminates the need for config file to resume
+ if 'val_artifact' not in self.__dict__: # If --upload_dataset is set, use the existing artifact, don't download
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(data_dict.get('train'),
+ opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(data_dict.get('val'),
+ opt.artifact_alias)
+ self.result_artifact, self.result_table, self.val_table, self.weights = None, None, None, None
+ if self.train_artifact_path is not None:
+ train_path = Path(self.train_artifact_path) / 'data/images/'
+ data_dict['train'] = str(train_path)
+ if self.val_artifact_path is not None:
+ val_path = Path(self.val_artifact_path) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ self.val_table = self.val_artifact.get("val")
+ self.map_val_table_path()
+ if self.val_artifact is not None:
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+ self.result_table = wandb.Table(["epoch", "id", "prediction", "avg_confidence"])
+ if opt.bbox_interval == -1:
+ self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ return data_dict
+
+ def download_dataset_artifact(self, path, alias):
+ if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):
+ dataset_artifact = wandb.use_artifact(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + ":" + alias)
+ assert dataset_artifact is not None, "'Error: W&B dataset artifact doesn\'t exist'"
+ datadir = dataset_artifact.download()
+ return datadir, dataset_artifact
+ return None, None
+
+ def download_model_artifact(self, opt):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
+ assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
+ modeldir = model_artifact.download()
+ epochs_trained = model_artifact.metadata.get('epochs_trained')
+ total_epochs = model_artifact.metadata.get('total_epochs')
+ assert epochs_trained < total_epochs, 'training to %g epochs is finished, nothing to resume.' % (
+ total_epochs)
+ return modeldir, model_artifact
+ return None, None
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model', type='model', metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score
+ })
+ model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
+ wandb.log_artifact(model_artifact,
+ aliases=['latest', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
+ print("Saving model artifact on epoch ", epoch + 1)
+
+ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):
+ with open(data_file) as f:
+ data = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])
+ names = {k: v for k, v in enumerate(names)} # to index dictionary
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['train']), names, name='train') if data.get('train') else None
+ self.val_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['val']), names, name='val') if data.get('val') else None
+ if data.get('train'):
+ data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
+ if data.get('val'):
+ data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
+ path = data_file if overwrite_config else '_wandb.'.join(data_file.rsplit('.', 1)) # updated data.yaml path
+ data.pop('download', None)
+ with open(path, 'w') as f:
+ yaml.dump(data, f)
+
+ if self.job_type == 'Training': # builds correct artifact pipeline graph
+ self.wandb_run.use_artifact(self.val_artifact)
+ self.wandb_run.use_artifact(self.train_artifact)
+ self.val_artifact.wait()
+ self.val_table = self.val_artifact.get('val')
+ self.map_val_table_path()
+ else:
+ self.wandb_run.log_artifact(self.train_artifact)
+ self.wandb_run.log_artifact(self.val_artifact)
+ return path
+
+ def map_val_table_path(self):
+ self.val_table_map = {}
+ print("Mapping dataset")
+ for i, data in enumerate(tqdm(self.val_table.data)):
+ self.val_table_map[data[3]] = data[0]
+
+ def create_dataset_table(self, dataset, class_to_id, name='dataset'):
+ # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
+ artifact = wandb.Artifact(name=name, type="dataset")
+ img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
+ img_files = tqdm(dataset.img_files) if not img_files else img_files
+ for img_file in img_files:
+ if Path(img_file).is_dir():
+ artifact.add_dir(img_file, name='data/images')
+ labels_path = 'labels'.join(dataset.path.rsplit('images', 1))
+ artifact.add_dir(labels_path, name='data/labels')
+ else:
+ artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
+ label_file = Path(img2label_paths([img_file])[0])
+ artifact.add_file(str(label_file),
+ name='data/labels/' + label_file.name) if label_file.exists() else None
+ table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
+ for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
+ height, width = shapes[0]
+ labels[:, 2:] = (xywh2xyxy(labels[:, 2:].view(-1, 4))) * torch.Tensor([width, height, width, height])
+ box_data, img_classes = [], {}
+ for cls, *xyxy in labels[:, 1:].tolist():
+ cls = int(cls)
+ box_data.append({"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls]),
+ "scores": {"acc": 1},
+ "domain": "pixel"})
+ img_classes[cls] = class_to_id[cls]
+ boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
+ table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), json.dumps(img_classes),
+ Path(paths).name)
+ artifact.add(table, name)
+ return artifact
+
+ def log_training_progress(self, predn, path, names):
+ if self.val_table and self.result_table:
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])
+ box_data = []
+ total_conf = 0
+ for *xyxy, conf, cls in predn.tolist():
+ if conf >= 0.25:
+ box_data.append(
+ {"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": "%s %.3f" % (names[cls], conf),
+ "scores": {"class_score": conf},
+ "domain": "pixel"})
+ total_conf = total_conf + conf
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ id = self.val_table_map[Path(path).name]
+ self.result_table.add_data(self.current_epoch,
+ id,
+ wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
+ total_conf / max(1, len(box_data))
+ )
+
+ def log(self, log_dict):
+ if self.wandb_run:
+ for key, value in log_dict.items():
+ self.log_dict[key] = value
+
+ def end_epoch(self, best_result=False):
+ if self.wandb_run:
+ wandb.log(self.log_dict)
+ self.log_dict = {}
+ if self.result_artifact:
+ train_results = wandb.JoinedTable(self.val_table, self.result_table, "id")
+ self.result_artifact.add(train_results, 'result')
+ wandb.log_artifact(self.result_artifact, aliases=['latest', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
+ self.result_table = wandb.Table(["epoch", "id", "prediction", "avg_confidence"])
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+
+ def finish_run(self):
+ if self.wandb_run:
+ if self.log_dict:
+ wandb.log(self.log_dict)
+ wandb.run.finish()
diff --git a/oneAPI_ODAV_APP/Model/read.txt b/oneAPI_ODAV_APP/Model/read.txt
new file mode 100644
index 000000000..7391e9086
--- /dev/null
+++ b/oneAPI_ODAV_APP/Model/read.txt
@@ -0,0 +1,2 @@
+Download the Trained Models and Test_Video Folder from google Drive link given below and extract it inside Neom_App Folder
+https://drive.google.com/file/d/1YXf8kMjowu28J5Z_ZPXoRIDABRKzmHis/view?usp=sharing
diff --git a/oneAPI_ODAV_APP/TEST_VIDEO/Visual_Pollution.mp4 b/oneAPI_ODAV_APP/TEST_VIDEO/Visual_Pollution.mp4
new file mode 100644
index 000000000..d5720a69f
Binary files /dev/null and b/oneAPI_ODAV_APP/TEST_VIDEO/Visual_Pollution.mp4 differ
diff --git a/oneAPI_ODAV_APP/favicon.ico b/oneAPI_ODAV_APP/favicon.ico
new file mode 100644
index 000000000..6f55c8a52
Binary files /dev/null and b/oneAPI_ODAV_APP/favicon.ico differ
diff --git a/oneAPI_ODAV_APP/home.py b/oneAPI_ODAV_APP/home.py
new file mode 100644
index 000000000..d5ecb4c5f
--- /dev/null
+++ b/oneAPI_ODAV_APP/home.py
@@ -0,0 +1,866 @@
+import tkinter as tk
+import tkinter.ttk as ttk
+from tkinter import messagebox, Frame, filedialog, Label, DISABLED, ACTIVE
+from PIL import Image, ImageTk, ImageGrab
+import configparser
+import json
+import pybboxes as pbx
+import geocoder
+import time
+import cv2
+from datetime import datetime
+
+
+class CreateToolTip(object):
+
+ def __init__(self, widget, text='widget info'):
+ self.waittime = 500
+ self.wraplength = 180
+ self.widget = widget
+ self.text = text
+ self.widget.bind("", self.enter)
+ self.widget.bind("", self.leave)
+ self.widget.bind("", self.leave)
+ self.id = None
+ self.tw = None
+
+ def enter(self, event=None):
+ self.schedule()
+
+ def leave(self, event=None):
+ self.unschedule()
+ self.hidetip()
+
+ def schedule(self):
+ self.unschedule()
+ self.id = self.widget.after(self.waittime, self.showtip)
+
+ def unschedule(self):
+ id = self.id
+ self.id = None
+ if id:
+ self.widget.after_cancel(id)
+
+ def showtip(self, event=None):
+ x = y = 0
+ x, y, cx, cy = self.widget.bbox("insert")
+ x += self.widget.winfo_rootx() + 25
+ y += self.widget.winfo_rooty() + 20
+ self.tw = tk.Toplevel(self.widget)
+ self.tw.wm_overrideredirect(True)
+ self.tw.wm_geometry("+%d+%d" % (x, y))
+ label = tk.Label(self.tw, text=self.text, justify='left',
+ background="#ffffff", relief='solid', borderwidth=1,
+ wraplength=self.wraplength)
+ label.pack(ipadx=1)
+
+ def hidetip(self):
+ tw = self.tw
+ self.tw = None
+ if tw:
+ tw.destroy()
+
+
+focus_area = []
+
+
+class MousePositionTracker(tk.Frame):
+ """ Tkinter Canvas mouse position widget. """
+
+ def __init__(self, canvas):
+ self.canvas = canvas
+ self.canv_width = self.canvas.cget('width')
+ self.canv_height = self.canvas.cget('height')
+ self.reset()
+
+ # Create canvas cross-hair lines.
+ xhair_opts = dict(dash=(3, 2), fill='white', state=tk.HIDDEN)
+ self.lines = (self.canvas.create_line(0, 0, 0, self.canv_height, **xhair_opts),
+ self.canvas.create_line(0, 0, self.canv_width, 0, **xhair_opts))
+
+ def cur_selection(self):
+ return (self.start, self.end)
+
+ def begin(self, event):
+ self.hide()
+ self.start = (event.x, event.y) # Remember position (no drawing).
+
+ def update(self, event):
+ self.end = (event.x, event.y)
+ self._update(event)
+ self._command(self.start, (event.x, event.y)) # User callback.
+
+ def _update(self, event):
+ # Update cross-hair lines.
+ self.canvas.coords(self.lines[0], event.x, 0, event.x, self.canv_height)
+ self.canvas.coords(self.lines[1], 0, event.y, self.canv_width, event.y)
+ self.show()
+
+ def reset(self):
+ self.start = self.end = None
+
+ def hide(self):
+ self.canvas.itemconfigure(self.lines[0], state=tk.HIDDEN)
+ self.canvas.itemconfigure(self.lines[1], state=tk.HIDDEN)
+
+ def show(self):
+ self.canvas.itemconfigure(self.lines[0], state=tk.NORMAL)
+ self.canvas.itemconfigure(self.lines[1], state=tk.NORMAL)
+
+ def autodraw(self, command=lambda *args: None):
+ """Setup automatic drawing; supports command option"""
+ self.reset()
+ self._command = command
+ self.canvas.bind("", self.begin)
+ self.canvas.bind("", self.update)
+ self.canvas.bind("", self.quit)
+
+ def quit(self, event):
+ self.hide() # Hide cross-hairs.
+ self.reset()
+
+
+class SelectionObject:
+ """ Widget to display a rectangular area on given canvas defined by two points
+ representing its diagonal.
+ """
+
+ def __init__(self, canvas, select_opts):
+ # Create attributes needed to display selection.
+ self.canvas = canvas
+ self.select_opts1 = select_opts
+ self.width = self.canvas.cget('width')
+ self.height = self.canvas.cget('height')
+
+ # Options for areas outside rectanglar selection.
+ select_opts1 = self.select_opts1.copy() # Avoid modifying passed argument.
+ select_opts1.update(state=tk.HIDDEN) # Hide initially.
+ # Separate options for area inside rectanglar selection.
+ select_opts2 = dict(dash=(2, 2), fill='', outline='white', state=tk.HIDDEN)
+
+ # Initial extrema of inner and outer rectangles.
+ imin_x, imin_y, imax_x, imax_y = 0, 0, 1, 1
+ omin_x, omin_y, omax_x, omax_y = 0, 0, self.width, self.height
+
+ self.rects = (
+ # Area *outside* selection (inner) rectangle.
+ self.canvas.create_rectangle(omin_x, omin_y, omax_x, imin_y, **select_opts1),
+ self.canvas.create_rectangle(omin_x, imin_y, imin_x, imax_y, **select_opts1),
+ self.canvas.create_rectangle(imax_x, imin_y, omax_x, imax_y, **select_opts1),
+ self.canvas.create_rectangle(omin_x, imax_y, omax_x, omax_y, **select_opts1),
+ # Inner rectangle.
+ self.canvas.create_rectangle(imin_x, imin_y, imax_x, imax_y, **select_opts2)
+ )
+
+ def update(self, start, end):
+ # Current extrema of inner and outer rectangles.
+ imin_x, imin_y, imax_x, imax_y = self._get_coords(start, end)
+ omin_x, omin_y, omax_x, omax_y = 0, 0, self.width, self.height
+
+ # Update coords of all rectangles based on these extrema.
+ self.canvas.coords(self.rects[0], omin_x, omin_y, omax_x, imin_y),
+ self.canvas.coords(self.rects[1], omin_x, imin_y, imin_x, imax_y),
+ self.canvas.coords(self.rects[2], imax_x, imin_y, omax_x, imax_y),
+ self.canvas.coords(self.rects[3], omin_x, imax_y, omax_x, omax_y),
+ self.canvas.coords(self.rects[4], imin_x, imin_y, imax_x, imax_y),
+
+ for rect in self.rects: # Make sure all are now visible.
+ self.canvas.itemconfigure(rect, state=tk.NORMAL)
+
+ def _get_coords(self, start, end):
+ """ Determine coords of a polygon defined by the start and
+ end points one of the diagonals of a rectangular area.
+ """
+
+ focus_area = [min((start[0], end[0])), min((start[1], end[1])), max((start[0], end[0])),
+ max((start[1], end[1]))]
+
+ return (focus_area)
+
+ def hide(self):
+ for rect in self.rects:
+ self.canvas.itemconfigure(rect, state=tk.HIDDEN)
+
+
+version = '1.0.1'
+
+
+def main():
+ def loading():
+ rootx = tk.Tk()
+ rootx.iconbitmap(default='Data/Images/icons/favicon.ico')
+ rootx.image = tk.PhotoImage(file='Data/Images/Background/load.gif')
+ labelx = tk.Label(rootx, image=rootx.image, bg='white')
+ rootx.overrideredirect(True)
+ rootx.geometry("+600+100")
+ rootx.wm_attributes("-topmost", True)
+ rootx.wm_attributes("-disabled", True)
+ rootx.wm_attributes("-transparentcolor", "white")
+ labelx.pack()
+ labelx.after(500, lambda: labelx.destroy())
+ rootx.after(500, lambda: rootx.destroy()) # Destroy the widget after 0.5 seconds
+ labelx.mainloop()
+
+ for i in range(0, 1):
+ loading()
+
+ def display():
+
+ class Store_DATA_IN_INI:
+
+ def __init__(self, win):
+
+ load = cv2.imread('Data/Images/Background/background.jpg', 1)
+ cv2imagex1 = cv2.cvtColor(load, cv2.COLOR_BGR2RGBA)
+ load = Image.fromarray(cv2imagex1)
+ regx = tk.Tk()
+ load = load.resize((int(regx.winfo_screenwidth()), int(regx.winfo_screenheight())), Image.LANCZOS)
+
+ render = ImageTk.PhotoImage(load)
+ img = tk.Label(image=render)
+ img.image = render
+ img.place(x=-1, y=0)
+
+ load = cv2.imread('Data/Images/Background/logo.png', 1)
+ cv2imagex1 = cv2.cvtColor(load, cv2.COLOR_BGR2RGBA)
+ load = Image.fromarray(cv2imagex1)
+ load = load.resize((int(250), int(160)), Image.LANCZOS)
+ render = ImageTk.PhotoImage(load)
+ img = tk.Label(image=render)
+ img.image = render
+ img.place(x=1665, y=0)
+
+ self.b0 = tk.Button(win,
+ bg='#f7421e',
+ fg='#b7f731',
+ relief='flat',
+ width=20, command=self.quit)
+ self.b0.place(x=0, y=0, width=150, height=150)
+
+ self.b0b = tk.Button(win,
+ bg='#33ff00',
+ fg='#b7f731',
+ relief='flat',
+ width=100, command=self.settings)
+ self.b0b.place(x=1770, y=950, width=150, height=150)
+
+ self.b1 = ttk.Button(win, text='Live Dash Cam with Segmentation', width=20, command=self.pot_holes)
+ self.b1.place(x=90, y=470, width=300, height=100)
+
+ self.b2 = ttk.Button(win, text='Uploaded Data Viewer', width=20, command=self.data_viewer)
+ self.b2.place(x=300, y=780, width=300, height=100)
+
+ self.b3 = ttk.Button(win, text='Live Dash Cam', width=20, command=self.dash_cam)
+ self.b3.place(x=1400, y=220, width=300, height=100)
+
+ self.b4 = ttk.Button(win, text='Detect Picture', width=20, command=self.label_picture)
+ self.b4.place(x=1480, y=530, width=300, height=100)
+
+ regx.destroy()
+
+ def settings(self):
+
+ class TOKENS:
+
+ def __init__(self, tokens):
+
+ config = configparser.ConfigParser()
+ config.read('Data/Keys/config.ini')
+ config_token = config.items('TOKEN')
+ TOKEN = str(config_token[0][1])
+ UP_URL = str(config_token[1][1])
+
+ self.lbl = tk.Label(tokens, text="TOKEN", font=("Helvetica", 30, 'bold'), bg='white')
+ self.lbl.place(x=60, y=70)
+
+ self.txtfld1 = ttk.Combobox(tokens, font=("Helvetica", 30, 'bold'))
+ self.txtfld1.place(x=220, y=70, width=550)
+ self.txtfld1.set(TOKEN)
+
+ self.lb2 = tk.Label(tokens, text="USER", font=("Helvetica", 30, 'bold'), bg='white')
+ self.lb2.place(x=60, y=170)
+
+ self.txtfld2 = ttk.Combobox(tokens, font=("Helvetica", 30, 'bold'))
+ self.txtfld2.place(x=220, y=170, width=550)
+ self.txtfld2.set(UP_URL)
+
+ self.btn = ttk.Button(tokens, text="UPDATE", width=20, command=self.token_validate)
+ self.btn.place(x=500, y=250, width=270, height=50)
+
+ def token_validate(self):
+ if (str(self.txtfld1.get()) != "") and (str(self.txtfld2.get()) != ""):
+
+ config = configparser.ConfigParser()
+ config.write('Data/Keys/config.ini')
+
+ file = open('Data/Keys/config.ini', "w+")
+
+ config.add_section('TOKEN')
+ config.set('TOKEN', 'TOKEN', str(self.txtfld1.get()))
+ config.set('TOKEN', 'UP_URL', str(self.txtfld2.get()))
+
+ config.write(file)
+ file.close()
+
+ tk.messagebox.showinfo("Success", "Updated Successfully")
+
+ tokens_user_login.destroy()
+
+ else:
+ tk.messagebox.showerror("Error", "EMPTY VALUES")
+
+ @staticmethod
+ def quit():
+ tokens_user_login.destroy()
+
+ tokens_user_login = tk.Tk()
+ tokens_user_login.config(background='white')
+ tokens_user_login.attributes('-alpha', 0.9)
+
+ TOKENS(tokens_user_login)
+ tokens_user_login.iconbitmap(default='Data/Images/icons/favicon.ico')
+ tokens_user_login.title('oneAPI_ODAV Car Dashboard Settings ' + version)
+ tokens_user_login.geometry("850x350")
+ tokens_user_login.mainloop()
+
+ @staticmethod
+ def quit():
+ window_user_login1.destroy()
+ exit(0)
+
+ def pot_holes(self):
+ import torch
+ with torch.no_grad():
+ from ENGINES import AI_POTHOLES_DETECTION
+ AI_POTHOLES_DETECTION.AI_POTHOLES_DETECTION(source="TEST_VIDEO/testx.mp4",
+ model_weights="Model/yolov7.pt")
+ # window_user_login1.destroy()
+ # second(user_key=user_key, job="HOSTEL ENVIRONMENT")
+
+ def data_viewer(self):
+ window_user_login1.destroy()
+ data_viewer()
+
+ def dash_cam(self):
+ import torch
+ with torch.no_grad():
+ from ENGINES import AI_DASH_CAM
+ AI_DASH_CAM.AI_DASH_CAM(source="TEST_VIDEO/testx.mp4",
+ model_weights="Model/yolov7.pt")
+ # window_user_login1.destroy()
+ # second(user_key=user_key, job="BUS ENVIRONMENT")
+
+ def label_picture(self):
+ filename = filedialog.askopenfilename(initialdir="/",
+ title="Select a image File",
+ filetypes=(("Image files",
+ "*.jpg"),
+ ("Image files",
+ "*.jpeg*"),
+ ("Image files",
+ "*.png*")
+ ))
+ import torch
+ from ENGINES import AI_DASH_CAM_IMAGE
+ AI_DASH_CAM_IMAGE.AI_DASH_CAM_IMAGE(filename, model_weights="Model/yolov7.pt")
+ # second(user_key=user_key, job="EXAM ENVIRONMENT")
+
+ @staticmethod
+ def start(self):
+ window_user_login1.destroy()
+ # second(user_key=user_key, job="START ENVIRONMENT")
+
+ window_user_login1 = tk.Tk()
+ window_user_login1.config(background='#EFEFEF')
+ window_user_login1.attributes('-fullscreen', True)
+
+ Store_DATA_IN_INI(window_user_login1)
+ window_user_login1.iconbitmap(default='Data/Images/icons/favicon.ico')
+ window_user_login1.title('oneAPI_ADAV')
+ window_user_login1.mainloop()
+
+ def data_viewer():
+
+ class View_Image(tk.Frame):
+
+ # Default selection object options.
+ SELECT_OPTS = dict(dash=(2, 2), stipple='gray25', fill='red',
+ outline='')
+
+ def __init__(self, win, *args, **kwargs):
+ super().__init__(win, *args, **kwargs)
+
+ self.label_class = {0: 'person', 1: 'bicycle', 2: 'car', 3: 'motorcycle', 4: 'airplane', 5: 'bus',
+ 6: 'train', 7: 'truck', 8: 'boat', 9: 'traffic light',
+ 10: 'fire hydrant', 11: 'stop sign', 12: 'parking meter', 13: 'bench', 14: 'bird',
+ 15: 'cat', 16: 'dog', 17: 'horse', 18: 'sheep', 19: 'cow',
+ 20: 'elephant', 21: 'bear', 22: 'zebra', 23: 'giraffe', 24: 'backpack',
+ 25: 'umbrella',
+ 26: 'handbag', 27: 'tie', 28: 'suitcase', 29: 'frisbee',
+ 30: 'skis', 31: 'snowboard', 32: 'sports ball', 33: 'kite', 34: 'baseball bat',
+ 35: 'baseball glove', 36: 'skateboard', 37: 'surfboard',
+ 38: 'tennis racket', 39: 'bottle', 40: 'wine glass', 41: 'cup', 42: 'fork',
+ 43: 'knife',
+ 44: 'spoon', 45: 'bowl', 46: 'banana', 47: 'apple',
+ 48: 'sandwich', 49: 'orange', 50: 'broccoli', 51: 'carrot', 52: 'hot dog',
+ 53: 'pizza',
+ 54: 'donut', 55: 'cake', 56: 'chair', 57: 'couch',
+ 58: 'potted plant', 59: 'bed', 60: 'dining table', 61: 'toilet', 62: 'tv',
+ 63: 'laptop',
+ 64: 'mouse', 65: 'remote', 66: 'keyboard', 67: 'cell phone',
+ 68: 'microwave', 69: 'oven', 70: 'toaster', 71: 'sink', 72: 'refrigerator',
+ 73: 'book',
+ 74: 'clock', 75: 'vase', 76: 'scissors', 77: 'teddy bear',
+ 78: 'hair drier', 79: 'toothbrush'}
+
+ self.image_class = {'person': 0, 'bicycle': 1, 'car': 2, 'motorcycle': 3, 'airplane': 4, 'bus': 5,
+ 'train': 6, 'truck': 7, 'boat': 8, 'traffic light': 9,
+ 'fire hydrant': 10, 'stop sign': 11, 'parking meter': 12, 'bench': 13, 'bird': 14,
+ 'cat': 15, 'dog': 16, 'horse': 17, 'sheep': 18, 'cow': 19,
+ 'elephant': 20, 'bear': 21, 'zebra': 22, 'giraffe': 23, 'backpack': 24,
+ 'umbrella': 25,
+ 'handbag': 26, 'tie': 27, 'suitcase': 28, 'frisbee': 29,
+ 'skis': 30, 'snowboard': 31, 'sports ball': 32, 'kite': 33, 'baseball bat': 34,
+ 'baseball glove': 35, 'skateboard': 36, 'surfboard': 37,
+ 'tennis racket': 38, 'bottle': 39, 'wine glass': 40, 'cup': 41, 'fork': 42,
+ 'knife': 43,
+ 'spoon': 44, 'bowl': 45, 'banana': 46, 'apple': 47,
+ 'sandwich': 48, 'orange': 49, 'broccoli': 50, 'carrot': 51, 'hot dog': 52,
+ 'pizza': 53,
+ 'donut': 54, 'cake': 55, 'chair': 56, 'couch': 57,
+ 'potted plant': 58, 'bed': 59, 'dining table': 60, 'toilet': 61, 'tv': 62,
+ 'laptop': 63,
+ 'mouse': 64, 'remote': 65, 'keyboard': 66, 'cell phone': 67,
+ 'microwave': 68, 'oven': 69, 'toaster': 70, 'sink': 71, 'refrigerator': 72,
+ 'book': 73,
+ 'clock': 74, 'vase': 75, 'scissors': 76, 'teddy bear': 77,
+ 'hair drier': 78, 'toothbrush': 79}
+
+ selected_values = ["", "", "", "", "", "", "", "", "", "", ""]
+
+ def on_drag(start, end, **kwarg): # Must accept these arguments.
+ self.selection_obj.update(start, end)
+ focus_area = self.selection_obj._get_coords(start, end)
+
+ print(focus_area)
+
+ x1, y1, x2, y2 = pbx.convert_bbox(focus_area, from_type="voc", to_type="yolo",
+ image_size=(665, 600))
+
+ print(x1, y1, x2, y2)
+
+ if x1 != 0.5 and y1 != 0.5 and x2 != 1.0 and y2 != 1.0:
+ self.txtfld3.set(str(x1))
+ self.txtfld4.set(str(y1))
+ self.txtfld5.set(str(x2))
+ self.txtfld6.set(str(y2))
+
+ def open_image_file():
+ filename = filedialog.askopenfilename(initialdir="/",
+ title="Select a image File",
+ filetypes=(("Image files",
+ "*.jpg"),
+ ("Image files",
+ "*.jpeg*"),
+ ("Image files",
+ "*.png*")
+ ))
+ new_camera(filename)
+
+ def new_camera(path=0):
+
+ vid = cv2.VideoCapture(path)
+
+ # Declare the width and height in variables
+ wi, hi = 665, 600
+
+ # Set the width and height
+ vid.set(cv2.CAP_PROP_FRAME_WIDTH, wi)
+ vid.set(cv2.CAP_PROP_FRAME_HEIGHT, hi)
+
+ _, frame = vid.read()
+
+ # Convert image from one color space to other
+ opencv_image = cv2.cvtColor(frame, cv2.COLOR_BGR2RGBA)
+
+ # Capture the latest frame and transform to image
+ captured_image = Image.fromarray(opencv_image).resize((665, 600), Image.LANCZOS)
+
+ # Convert captured image to photoimage
+ photo_image = ImageTk.PhotoImage(image=captured_image)
+
+ self.canvas = tk.Canvas(win, width=wi, height=hi,
+ scrollregion=(0, 0, 500, 500))
+ self.canvas.place(x=1250, y=150)
+
+ self.canvas.create_image(0, 0, image=photo_image, anchor=tk.NW)
+ self.canvas.img = photo_image # Keep reference.
+
+ # Create selection object to show current selection boundaries.
+ self.selection_obj = SelectionObject(self.canvas, self.SELECT_OPTS)
+
+ # Callback function to update it given two points of its diagonal.
+
+ # Create mouse position tracker that uses the function.
+ self.posn_tracker = MousePositionTracker(self.canvas)
+ self.posn_tracker.autodraw(command=on_drag) # Enable callbacks.
+
+ latitude, longitude = geocoder.ip('me').latlng
+
+ config = configparser.ConfigParser()
+ config.read('Data/Keys/config.ini')
+ config_token = config.items('TOKEN')
+ UP_URL = str(config_token[1][1])
+
+ self.txtfld1.set(UP_URL)
+ self.txtfld2.set("")
+ self.txtfld3.set("")
+ self.txtfld4.set("")
+ self.txtfld5.set("")
+ self.txtfld6.set("")
+ self.txtfld7.set(latitude)
+ self.txtfld8.set(longitude)
+
+ self.btn_submit.config(state=ACTIVE)
+ vid.release()
+
+ def selectItem(a):
+ curItem = self.tree.focus()
+
+ selected_values = (self.tree.item(curItem)['values'])
+
+ path = selected_values[2]
+
+ if path == "":
+ path = "Data/Images/Background/no_image.jpg"
+
+ imgx = ImageTk.PhotoImage(Image.open(path))
+
+ width = imgx.width() / 665
+ height = imgx.height() / 600
+
+ wi, hi = imgx.width(), imgx.height()
+
+ img = ImageTk.PhotoImage(Image.open(path).resize((665, 600), Image.LANCZOS))
+
+ self.canvas = tk.Canvas(win, width=img.width(), height=img.height(),
+ scrollregion=(0, 0, 500, 500))
+ self.canvas.place(x=1250, y=150)
+
+ self.canvas.create_image(0, 0, image=img, anchor=tk.NW)
+ self.canvas.img = img # Keep reference.
+
+ # Create selection object to show current selection boundaries.
+ self.selection_obj = SelectionObject(self.canvas, self.SELECT_OPTS)
+
+ # Callback function to update it given two points of its diagonal.
+
+ # Create mouse position tracker that uses the function.
+ self.posn_tracker = MousePositionTracker(self.canvas)
+ self.posn_tracker.autodraw(command=on_drag) # Enable callbacks.
+
+ center_X = (float(selected_values[3]) * wi) / width
+ center_y = (float(selected_values[4]) * hi) / height
+ widthx = (float(selected_values[5]) * wi) / width
+ heightx = (float(selected_values[6]) * hi) / height
+
+ x = int(center_X - (widthx / 2))
+ y = int(center_y - (heightx / 2))
+
+ on_drag((int(x), int(y)), (x + int(widthx), int(y + heightx)))
+
+ self.txtfld1.set(selected_values[1])
+ self.txtfld2.set(selected_values[9])
+ self.txtfld3.set(selected_values[3])
+ self.txtfld4.set(selected_values[4])
+ self.txtfld5.set(selected_values[5])
+ self.txtfld6.set(selected_values[6])
+ self.txtfld7.set(selected_values[7])
+ self.txtfld8.set(selected_values[8])
+
+ if selected_values[11] == "Yes":
+ self.btn_submit.config(state=DISABLED)
+ else:
+ self.btn_submit.config(state=ACTIVE)
+
+ def validate():
+ try:
+ on_drag((int(0), int(0)), (665, 600))
+ time.sleep(1)
+ now = datetime.now()
+ filename = "Data/Saved_Images/" + str(now.strftime("%Y%m%d%H%M%S") + str(".jpg"))
+ ImageGrab.grab(bbox=(
+ self.canvas.winfo_rootx(),
+ self.canvas.winfo_rooty(),
+ self.canvas.winfo_rootx() + self.canvas.winfo_width(),
+ self.canvas.winfo_rooty() + self.canvas.winfo_height()
+ )).save(filename)
+
+ json_data = {
+ "userid": str(self.txtfld1.get()),
+ "image_url": filename,
+ "w_cord": float(self.txtfld3.get()),
+ "x_cord": float(self.txtfld4.get()),
+ "y_cord": float(self.txtfld5.get()),
+ "z_cord": float(self.txtfld6.get()),
+ "latitude": float(self.txtfld7.get()),
+ "longitude": float(self.txtfld8.get()),
+ "class_of_image": self.image_class[str(self.txtfld2.get())],
+ "auto": "No",
+ "uploaded": "No"
+ }
+
+ print(json_data)
+
+ with open('Data/Data/sample.json', 'r+') as openfile:
+ # Reading from json file
+ json_object = json.load(openfile)
+ json_object["data"].append(json_data)
+ openfile.seek(0)
+ json.dump(json_object, openfile, indent=4)
+
+ print(json_data)
+
+ messagebox.showinfo("Successfully", "The data saved into Json Data successfully")
+ load_tree()
+ except Exception:
+ print(Exception)
+ messagebox.showerror("Operation failed", "The data cannot be saved. Entered data invalid")
+
+ def load_tree():
+
+ self.temp_values = []
+
+ with open('Data/Data/sample.json', 'r') as openfile:
+ # Reading from json file
+ json_object = json.load(openfile)
+ for each in json_object["data"]:
+ self.temp_values.append([each["userid"], each["image_url"], each["w_cord"], each["x_cord"],
+ each["y_cord"], each["z_cord"], each["latitude"],
+ each["longitude"],
+ each["class_of_image"], each["auto"], each["uploaded"]])
+
+ self.frame = Frame(win)
+ self.frame.place(x=20, y=755)
+
+ self.tree = ttk.Treeview(self.frame, columns=(1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12), height=14,
+ show="headings")
+ self.tree.pack(side='left')
+ self.tree.bind('', selectItem)
+
+ self.val = ["serial No", "User Id", "Image Url", "W Coordinate", "X Coordinate", "Y Coordinate",
+ "Z Coordinate", "Latitude", "Longitude", "Class Of Image", "Auto", "Uploaded"]
+
+ for ii in range(1, len(self.val) + 1):
+ self.tree.heading(ii, text=self.val[ii - 1])
+
+ for ii in range(1, len(self.val) + 1):
+ self.tree.column(ii, width=156, anchor='center')
+
+ self.scroll1 = ttk.Scrollbar(self.frame, orient="vertical", command=self.tree.yview)
+ self.scroll1.pack(side='right', fill='y')
+
+ for i in range(len(self.temp_values) - 1, -1, -1):
+ if str(self.temp_values[i][10]) == "Yes":
+ self.tree.insert('', 'end', values=(str(i),
+ str(self.temp_values[i][0]),
+ str(self.temp_values[i][1]),
+ str(self.temp_values[i][2])
+ , str(self.temp_values[i][3]),
+ str(self.temp_values[i][4]),
+ str(self.temp_values[i][5]),
+ str(self.temp_values[i][6]),
+ str(self.temp_values[i][7]),
+ str(self.label_class[self.temp_values[i][8]]),
+ str(self.temp_values[i][9]),
+ str(self.temp_values[i][10])),
+ tags=('odd',))
+ else:
+ self.tree.insert('', 'end', values=(str(i),
+ str(self.temp_values[i][0]),
+ str(self.temp_values[i][1]),
+ str(self.temp_values[i][2])
+ , str(self.temp_values[i][3]),
+ str(self.temp_values[i][4]),
+ str(self.temp_values[i][5]),
+ str(self.temp_values[i][6]),
+ str(self.temp_values[i][7]),
+ str(self.label_class[self.temp_values[i][8]]),
+ str(self.temp_values[i][9]),
+ str(self.temp_values[i][10])),
+ tags=('even',))
+
+ self.tree.tag_configure('odd', background='#CCFF99')
+ self.tree.tag_configure('even', background='#FFFF99')
+
+ load = cv2.imread('Data/Images/Background/background_2.jpg', 1)
+ cv2imagex1 = cv2.cvtColor(load, cv2.COLOR_BGR2RGBA)
+ load = Image.fromarray(cv2imagex1)
+ load = load.resize((int(1920), int(1080)), Image.LANCZOS)
+ render = ImageTk.PhotoImage(load)
+ img = tk.Label(image=render)
+ img.image = render
+ img.place(x=0, y=0)
+
+ load = cv2.imread('Data/Images/Background/logo.png', 1)
+ cv2imagex1 = cv2.cvtColor(load, cv2.COLOR_BGR2RGBA)
+ load = Image.fromarray(cv2imagex1)
+ load = load.resize((int(250), int(160)), Image.LANCZOS)
+ render = ImageTk.PhotoImage(load)
+ img = tk.Label(image=render)
+ img.image = render
+ img.place(x=1515, y=0)
+
+ path = "Data/Images/Background/no_image.jpg"
+ imgx = ImageTk.PhotoImage(Image.open(path))
+
+ width = int(imgx.width() // 665)
+ height = int(imgx.height() // 600)
+
+ img = ImageTk.PhotoImage(Image.open(path).resize((665, 600), Image.LANCZOS))
+
+ self.canvas = tk.Canvas(win, width=img.width(), height=img.height(),
+ scrollregion=(0, 0, 500, 500))
+ self.canvas.place(x=1250, y=150)
+
+ self.canvas.create_image(0, 0, image=img, anchor=tk.NW)
+ self.canvas.img = img # Keep reference.
+
+ # LABEL AND TEXT BOX TO ENTER DETAILS OF ALL ELEMENTS OF A STATION
+ self.lb_title = Label(win, text="Image Data Captured",
+ font=("Ariel", 40, "bold"), bg='#F7F7F9')
+ self.lb_title.place(x=420, y=200)
+
+ self.lb1 = Label(win, text="User Id", font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb1.place(x=60, y=350)
+
+ self.txtfld1 = ttk.Combobox(win, font=("Helvetica", 20), )
+ self.txtfld1.place(x=300, y=350)
+ self.txtfld1.set(selected_values[1])
+ self.txtfld1.configure(state=DISABLED)
+
+ self.lb2 = Label(win, text="Image Class", fg='black', font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb2.place(x=650, y=350)
+
+ self.txtfld2 = ttk.Combobox(win, font=("Helvetica", 20),
+ values=['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus',
+ 'train', 'truck', 'boat', 'traffic light',
+ 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird',
+ 'cat', 'dog', 'horse', 'sheep', 'cow',
+ 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella',
+ 'handbag', 'tie', 'suitcase', 'frisbee',
+ 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat',
+ 'baseball glove', 'skateboard', 'surfboard',
+ 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife',
+ 'spoon', 'bowl', 'banana', 'apple',
+ 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza',
+ 'donut', 'cake', 'chair', 'couch',
+ 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop',
+ 'mouse', 'remote', 'keyboard', 'cell phone',
+ 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book',
+ 'clock', 'vase', 'scissors', 'teddy bear',
+ 'hair drier', 'toothbrush'])
+ self.txtfld2.place(x=890, y=350)
+ self.txtfld2.set(selected_values[9])
+
+ self.lb3 = Label(win, text="W Coordinate", fg='black', font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb3.place(x=60, y=425)
+
+ self.txtfld3 = ttk.Combobox(win, font=("Helvetica", 20))
+ self.txtfld3.place(x=300, y=425)
+ self.txtfld3.set(selected_values[3])
+ self.txtfld3.config(state=DISABLED)
+
+ self.lb4 = Label(win, text="X Coordinate", fg='black', font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb4.place(x=650, y=425)
+
+ self.txtfld4 = ttk.Combobox(win, font=("Helvetica", 20))
+ self.txtfld4.place(x=890, y=425)
+ self.txtfld4.set(selected_values[4])
+ self.txtfld4.config(state=DISABLED)
+
+ self.lb5 = Label(win, text="Y Coordinate", fg='black', font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb5.place(x=60, y=500)
+
+ self.txtfld5 = ttk.Combobox(win, font=("Helvetica", 20))
+ self.txtfld5.place(x=300, y=500)
+ self.txtfld5.set(selected_values[5])
+ self.txtfld5.config(state=DISABLED)
+
+ self.lb6 = Label(win, text="Z Coordinate", fg='black', font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb6.place(x=650, y=500)
+
+ self.txtfld6 = ttk.Combobox(win, font=("Helvetica", 20))
+ self.txtfld6.place(x=890, y=500)
+ self.txtfld6.set(selected_values[6])
+ self.txtfld6.config(state=DISABLED)
+
+ self.lb7 = Label(win, text="Latitude", fg='black', font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb7.place(x=60, y=575)
+
+ self.txtfld7 = ttk.Combobox(win, font=("Helvetica", 20))
+ self.txtfld7.place(x=300, y=575)
+ self.txtfld7.set(selected_values[7])
+ self.txtfld7.config(state=DISABLED)
+
+ self.lb8 = Label(win, text="Longitude", fg='black', font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb8.place(x=650, y=575)
+
+ self.txtfld8 = ttk.Combobox(win, font=("Helvetica", 20))
+ self.txtfld8.place(x=890, y=575)
+ self.txtfld8.set(selected_values[8])
+ self.txtfld8.config(state=DISABLED)
+
+ load_tree()
+
+ self.btn_submit = ttk.Button(win, text="SUBMIT", command=validate)
+ self.btn_submit.place(x=540, y=660, width=250, height=60)
+
+ s = ttk.Style()
+ s.configure('my.TButton', font=('Aerial', 18, 'bold'))
+
+ self.btn_edit_images = ttk.Button(win, text="IMAGES", style='my.TButton', width=20,
+ command=open_image_file)
+ self.btn_edit_images.place(x=150, y=0, width=300, height=150)
+
+ self.btn_new_camera = ttk.Button(win, text="CAMERA", style='my.TButton', width=20, command=new_camera)
+ self.btn_new_camera.place(x=450, y=0, width=300, height=150)
+
+ self.b0 = tk.Button(win,
+ bg='#33ff00',
+ fg='#b7f731',
+ relief='flat',
+ width=20, command=self.back)
+ self.b0.place(x=0, y=0, width=150, height=150)
+
+ self.b0r = tk.Button(win,
+ bg='#f7421e',
+ fg='#b7f731',
+ relief='flat',
+ width=20, command=self.quit)
+ self.b0r.place(x=1770, y=0, width=150, height=150)
+
+ @staticmethod
+ def quit():
+ window_user_login3.destroy()
+ exit(0)
+
+ @staticmethod
+ def back():
+ window_user_login3.destroy()
+ display()
+
+ window_user_login3 = tk.Tk()
+ window_user_login3.config(background='#EFEFEF')
+ window_user_login3.attributes('-fullscreen', True)
+
+ View_Image(window_user_login3)
+ window_user_login3.iconbitmap(default='Data/Images/icons/favicon.ico')
+ window_user_login3.title('oneAPI_ODAV')
+ window_user_login3.mainloop()
+
+ display()
+
+
+if __name__ == '__main__':
+ main()
diff --git a/oneAPI_ODAV_APP/models/__init__.py b/oneAPI_ODAV_APP/models/__init__.py
new file mode 100644
index 000000000..a6131c10e
--- /dev/null
+++ b/oneAPI_ODAV_APP/models/__init__.py
@@ -0,0 +1 @@
+# init
diff --git a/oneAPI_ODAV_APP/models/common.py b/oneAPI_ODAV_APP/models/common.py
new file mode 100644
index 000000000..015cc788a
--- /dev/null
+++ b/oneAPI_ODAV_APP/models/common.py
@@ -0,0 +1,2020 @@
+import math
+from copy import copy
+from pathlib import Path
+
+
+import numpy as np
+import pandas as pd
+import requests
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+from torchvision.ops import DeformConv2d
+from PIL import Image
+from torch.cuda import amp
+
+from utils.datasets import letterbox
+from utils.general import non_max_suppression, make_divisible, scale_coords, increment_path, xyxy2xywh
+from utils.plots import color_list, plot_one_box
+from utils.torch_utils import time_synchronized
+
+
+##### basic ####
+
+def autopad(k, p=None): # kernel, padding
+ # Pad to 'same'
+ if p is None:
+ p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
+ return p
+
+
+class MP(nn.Module):
+ def __init__(self, k=2):
+ super(MP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class SP(nn.Module):
+ def __init__(self, k=3, s=1):
+ super(SP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=s, padding=k // 2)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class ReOrg(nn.Module):
+ def __init__(self):
+ super(ReOrg, self).__init__()
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1)
+
+
+class Concat(nn.Module):
+ def __init__(self, dimension=1):
+ super(Concat, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return torch.cat(x, self.d)
+
+
+class Chuncat(nn.Module):
+ def __init__(self, dimension=1):
+ super(Chuncat, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ x1 = []
+ x2 = []
+ for xi in x:
+ xi1, xi2 = xi.chunk(2, self.d)
+ x1.append(xi1)
+ x2.append(xi2)
+ return torch.cat(x1+x2, self.d)
+
+
+class Shortcut(nn.Module):
+ def __init__(self, dimension=0):
+ super(Shortcut, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return x[0]+x[1]
+
+
+class Foldcut(nn.Module):
+ def __init__(self, dimension=0):
+ super(Foldcut, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ x1, x2 = x.chunk(2, self.d)
+ return x1+x2
+
+
+class Conv(nn.Module):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Conv, self).__init__()
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ def forward(self, x):
+ return self.act(self.bn(self.conv(x)))
+
+ def fuseforward(self, x):
+ return self.act(self.conv(x))
+
+
+class RobustConv(nn.Module):
+ # Robust convolution (use high kernel size 7-11 for: downsampling and other layers). Train for 300 - 450 epochs.
+ def __init__(self, c1, c2, k=7, s=1, p=None, g=1, act=True, layer_scale_init_value=1e-6): # ch_in, ch_out, kernel, stride, padding, groups
+ super(RobustConv, self).__init__()
+ self.conv_dw = Conv(c1, c1, k=k, s=s, p=p, g=c1, act=act)
+ self.conv1x1 = nn.Conv2d(c1, c2, 1, 1, 0, groups=1, bias=True)
+ self.gamma = nn.Parameter(layer_scale_init_value * torch.ones(c2)) if layer_scale_init_value > 0 else None
+
+ def forward(self, x):
+ x = x.to(memory_format=torch.channels_last)
+ x = self.conv1x1(self.conv_dw(x))
+ if self.gamma is not None:
+ x = x.mul(self.gamma.reshape(1, -1, 1, 1))
+ return x
+
+
+class RobustConv2(nn.Module):
+ # Robust convolution 2 (use [32, 5, 2] or [32, 7, 4] or [32, 11, 8] for one of the paths in CSP).
+ def __init__(self, c1, c2, k=7, s=4, p=None, g=1, act=True, layer_scale_init_value=1e-6): # ch_in, ch_out, kernel, stride, padding, groups
+ super(RobustConv2, self).__init__()
+ self.conv_strided = Conv(c1, c1, k=k, s=s, p=p, g=c1, act=act)
+ self.conv_deconv = nn.ConvTranspose2d(in_channels=c1, out_channels=c2, kernel_size=s, stride=s,
+ padding=0, bias=True, dilation=1, groups=1
+ )
+ self.gamma = nn.Parameter(layer_scale_init_value * torch.ones(c2)) if layer_scale_init_value > 0 else None
+
+ def forward(self, x):
+ x = self.conv_deconv(self.conv_strided(x))
+ if self.gamma is not None:
+ x = x.mul(self.gamma.reshape(1, -1, 1, 1))
+ return x
+
+
+def DWConv(c1, c2, k=1, s=1, act=True):
+ # Depthwise convolution
+ return Conv(c1, c2, k, s, g=math.gcd(c1, c2), act=act)
+
+
+class GhostConv(nn.Module):
+ # Ghost Convolution https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
+ super(GhostConv, self).__init__()
+ c_ = c2 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, k, s, None, g, act)
+ self.cv2 = Conv(c_, c_, 5, 1, None, c_, act)
+
+ def forward(self, x):
+ y = self.cv1(x)
+ return torch.cat([y, self.cv2(y)], 1)
+
+
+class Stem(nn.Module):
+ # Stem
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Stem, self).__init__()
+ c_ = int(c2/2) # hidden channels
+ self.cv1 = Conv(c1, c_, 3, 2)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 2)
+ self.pool = torch.nn.MaxPool2d(2, stride=2)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ return self.cv4(torch.cat((self.cv3(self.cv2(x)), self.pool(x)), dim=1))
+
+
+class DownC(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, n=1, k=2):
+ super(DownC, self).__init__()
+ c_ = int(c1) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2//2, 3, k)
+ self.cv3 = Conv(c1, c2//2, 1, 1)
+ self.mp = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return torch.cat((self.cv2(self.cv1(x)), self.cv3(self.mp(x))), dim=1)
+
+
+class SPP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, k=(5, 9, 13)):
+ super(SPP, self).__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+
+ def forward(self, x):
+ x = self.cv1(x)
+ return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))
+
+
+class Bottleneck(nn.Module):
+ # Darknet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super(Bottleneck, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2, 3, 1, g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class Res(nn.Module):
+ # ResNet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super(Res, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 3, 1, g=g)
+ self.cv3 = Conv(c_, c2, 1, 1)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv3(self.cv2(self.cv1(x))) if self.add else self.cv3(self.cv2(self.cv1(x)))
+
+
+class ResX(Res):
+ # ResNet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=32, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+
+
+class Ghost(nn.Module):
+ # Ghost Bottleneck https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride
+ super(Ghost, self).__init__()
+ c_ = c2 // 2
+ self.conv = nn.Sequential(GhostConv(c1, c_, 1, 1), # pw
+ DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw
+ GhostConv(c_, c2, 1, 1, act=False)) # pw-linear
+ self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False),
+ Conv(c1, c2, 1, 1, act=False)) if s == 2 else nn.Identity()
+
+ def forward(self, x):
+ return self.conv(x) + self.shortcut(x)
+
+##### end of basic #####
+
+
+##### cspnet #####
+
+class SPPCSPC(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super(SPPCSPC, self).__init__()
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 1)
+ self.cv4 = Conv(c_, c_, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+ self.cv5 = Conv(4 * c_, c_, 1, 1)
+ self.cv6 = Conv(c_, c_, 3, 1)
+ self.cv7 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x1 = self.cv4(self.cv3(self.cv1(x)))
+ y1 = self.cv6(self.cv5(torch.cat([x1] + [m(x1) for m in self.m], 1)))
+ y2 = self.cv2(x)
+ return self.cv7(torch.cat((y1, y2), dim=1))
+
+class GhostSPPCSPC(SPPCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super().__init__(c1, c2, n, shortcut, g, e, k)
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = GhostConv(c1, c_, 1, 1)
+ self.cv2 = GhostConv(c1, c_, 1, 1)
+ self.cv3 = GhostConv(c_, c_, 3, 1)
+ self.cv4 = GhostConv(c_, c_, 1, 1)
+ self.cv5 = GhostConv(4 * c_, c_, 1, 1)
+ self.cv6 = GhostConv(c_, c_, 3, 1)
+ self.cv7 = GhostConv(2 * c_, c2, 1, 1)
+
+
+class GhostStem(Stem):
+ # Stem
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__(c1, c2, k, s, p, g, act)
+ c_ = int(c2/2) # hidden channels
+ self.cv1 = GhostConv(c1, c_, 3, 2)
+ self.cv2 = GhostConv(c_, c_, 1, 1)
+ self.cv3 = GhostConv(c_, c_, 3, 2)
+ self.cv4 = GhostConv(2 * c_, c2, 1, 1)
+
+
+class BottleneckCSPA(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class BottleneckCSPB(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class BottleneckCSPC(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+
+class ResCSPA(BottleneckCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResCSPB(BottleneckCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResCSPC(BottleneckCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResXCSPA(ResCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class ResXCSPB(ResCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class ResXCSPC(ResCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class GhostCSPA(BottleneckCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+
+class GhostCSPB(BottleneckCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+
+class GhostCSPC(BottleneckCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+##### end of cspnet #####
+
+
+##### yolor #####
+
+class ImplicitA(nn.Module):
+ def __init__(self, channel, mean=0., std=.02):
+ super(ImplicitA, self).__init__()
+ self.channel = channel
+ self.mean = mean
+ self.std = std
+ self.implicit = nn.Parameter(torch.zeros(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=self.mean, std=self.std)
+
+ def forward(self, x):
+ return self.implicit + x
+
+
+class ImplicitM(nn.Module):
+ def __init__(self, channel, mean=1., std=.02):
+ super(ImplicitM, self).__init__()
+ self.channel = channel
+ self.mean = mean
+ self.std = std
+ self.implicit = nn.Parameter(torch.ones(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=self.mean, std=self.std)
+
+ def forward(self, x):
+ return self.implicit * x
+
+##### end of yolor #####
+
+
+##### repvgg #####
+
+class RepConv(nn.Module):
+ # Represented convolution
+ # https://arxiv.org/abs/2101.03697
+
+ def __init__(self, c1, c2, k=3, s=1, p=None, g=1, act=True, deploy=False):
+ super(RepConv, self).__init__()
+
+ self.deploy = deploy
+ self.groups = g
+ self.in_channels = c1
+ self.out_channels = c2
+
+ assert k == 3
+ assert autopad(k, p) == 1
+
+ padding_11 = autopad(k, p) - k // 2
+
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ if deploy:
+ self.rbr_reparam = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=True)
+
+ else:
+ self.rbr_identity = (nn.BatchNorm2d(num_features=c1) if c2 == c1 and s == 1 else None)
+
+ self.rbr_dense = nn.Sequential(
+ nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False),
+ nn.BatchNorm2d(num_features=c2),
+ )
+
+ self.rbr_1x1 = nn.Sequential(
+ nn.Conv2d( c1, c2, 1, s, padding_11, groups=g, bias=False),
+ nn.BatchNorm2d(num_features=c2),
+ )
+
+ def forward(self, inputs):
+ if hasattr(self, "rbr_reparam"):
+ return self.act(self.rbr_reparam(inputs))
+
+ if self.rbr_identity is None:
+ id_out = 0
+ else:
+ id_out = self.rbr_identity(inputs)
+
+ return self.act(self.rbr_dense(inputs) + self.rbr_1x1(inputs) + id_out)
+
+ def get_equivalent_kernel_bias(self):
+ kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense)
+ kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1)
+ kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity)
+ return (
+ kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1) + kernelid,
+ bias3x3 + bias1x1 + biasid,
+ )
+
+ def _pad_1x1_to_3x3_tensor(self, kernel1x1):
+ if kernel1x1 is None:
+ return 0
+ else:
+ return nn.functional.pad(kernel1x1, [1, 1, 1, 1])
+
+ def _fuse_bn_tensor(self, branch):
+ if branch is None:
+ return 0, 0
+ if isinstance(branch, nn.Sequential):
+ kernel = branch[0].weight
+ running_mean = branch[1].running_mean
+ running_var = branch[1].running_var
+ gamma = branch[1].weight
+ beta = branch[1].bias
+ eps = branch[1].eps
+ else:
+ assert isinstance(branch, nn.BatchNorm2d)
+ if not hasattr(self, "id_tensor"):
+ input_dim = self.in_channels // self.groups
+ kernel_value = np.zeros(
+ (self.in_channels, input_dim, 3, 3), dtype=np.float32
+ )
+ for i in range(self.in_channels):
+ kernel_value[i, i % input_dim, 1, 1] = 1
+ self.id_tensor = torch.from_numpy(kernel_value).to(branch.weight.device)
+ kernel = self.id_tensor
+ running_mean = branch.running_mean
+ running_var = branch.running_var
+ gamma = branch.weight
+ beta = branch.bias
+ eps = branch.eps
+ std = (running_var + eps).sqrt()
+ t = (gamma / std).reshape(-1, 1, 1, 1)
+ return kernel * t, beta - running_mean * gamma / std
+
+ def repvgg_convert(self):
+ kernel, bias = self.get_equivalent_kernel_bias()
+ return (
+ kernel.detach().cpu().numpy(),
+ bias.detach().cpu().numpy(),
+ )
+
+ def fuse_conv_bn(self, conv, bn):
+
+ std = (bn.running_var + bn.eps).sqrt()
+ bias = bn.bias - bn.running_mean * bn.weight / std
+
+ t = (bn.weight / std).reshape(-1, 1, 1, 1)
+ weights = conv.weight * t
+
+ bn = nn.Identity()
+ conv = nn.Conv2d(in_channels = conv.in_channels,
+ out_channels = conv.out_channels,
+ kernel_size = conv.kernel_size,
+ stride=conv.stride,
+ padding = conv.padding,
+ dilation = conv.dilation,
+ groups = conv.groups,
+ bias = True,
+ padding_mode = conv.padding_mode)
+
+ conv.weight = torch.nn.Parameter(weights)
+ conv.bias = torch.nn.Parameter(bias)
+ return conv
+
+ def fuse_repvgg_block(self):
+ if self.deploy:
+ return
+ print(f"RepConv.fuse_repvgg_block")
+
+ self.rbr_dense = self.fuse_conv_bn(self.rbr_dense[0], self.rbr_dense[1])
+
+ self.rbr_1x1 = self.fuse_conv_bn(self.rbr_1x1[0], self.rbr_1x1[1])
+ rbr_1x1_bias = self.rbr_1x1.bias
+ weight_1x1_expanded = torch.nn.functional.pad(self.rbr_1x1.weight, [1, 1, 1, 1])
+
+ # Fuse self.rbr_identity
+ if (isinstance(self.rbr_identity, nn.BatchNorm2d) or isinstance(self.rbr_identity, nn.modules.batchnorm.SyncBatchNorm)):
+ # print(f"fuse: rbr_identity == BatchNorm2d or SyncBatchNorm")
+ identity_conv_1x1 = nn.Conv2d(
+ in_channels=self.in_channels,
+ out_channels=self.out_channels,
+ kernel_size=1,
+ stride=1,
+ padding=0,
+ groups=self.groups,
+ bias=False)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.to(self.rbr_1x1.weight.data.device)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.squeeze().squeeze()
+ # print(f" identity_conv_1x1.weight = {identity_conv_1x1.weight.shape}")
+ identity_conv_1x1.weight.data.fill_(0.0)
+ identity_conv_1x1.weight.data.fill_diagonal_(1.0)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.unsqueeze(2).unsqueeze(3)
+ # print(f" identity_conv_1x1.weight = {identity_conv_1x1.weight.shape}")
+
+ identity_conv_1x1 = self.fuse_conv_bn(identity_conv_1x1, self.rbr_identity)
+ bias_identity_expanded = identity_conv_1x1.bias
+ weight_identity_expanded = torch.nn.functional.pad(identity_conv_1x1.weight, [1, 1, 1, 1])
+ else:
+ # print(f"fuse: rbr_identity != BatchNorm2d, rbr_identity = {self.rbr_identity}")
+ bias_identity_expanded = torch.nn.Parameter( torch.zeros_like(rbr_1x1_bias) )
+ weight_identity_expanded = torch.nn.Parameter( torch.zeros_like(weight_1x1_expanded) )
+
+
+ #print(f"self.rbr_1x1.weight = {self.rbr_1x1.weight.shape}, ")
+ #print(f"weight_1x1_expanded = {weight_1x1_expanded.shape}, ")
+ #print(f"self.rbr_dense.weight = {self.rbr_dense.weight.shape}, ")
+
+ self.rbr_dense.weight = torch.nn.Parameter(self.rbr_dense.weight + weight_1x1_expanded + weight_identity_expanded)
+ self.rbr_dense.bias = torch.nn.Parameter(self.rbr_dense.bias + rbr_1x1_bias + bias_identity_expanded)
+
+ self.rbr_reparam = self.rbr_dense
+ self.deploy = True
+
+ if self.rbr_identity is not None:
+ del self.rbr_identity
+ self.rbr_identity = None
+
+ if self.rbr_1x1 is not None:
+ del self.rbr_1x1
+ self.rbr_1x1 = None
+
+ if self.rbr_dense is not None:
+ del self.rbr_dense
+ self.rbr_dense = None
+
+
+class RepBottleneck(Bottleneck):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut=True, g=1, e=0.5)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c2, 3, 1, g=g)
+
+
+class RepBottleneckCSPA(BottleneckCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepBottleneckCSPB(BottleneckCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepBottleneckCSPC(BottleneckCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepRes(Res):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c_, 3, 1, g=g)
+
+
+class RepResCSPA(ResCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResCSPB(ResCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResCSPC(ResCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResX(ResX):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=32, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c_, 3, 1, g=g)
+
+
+class RepResXCSPA(ResXCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResXCSPB(ResXCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResXCSPC(ResXCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+##### end of repvgg #####
+
+
+##### transformer #####
+
+class TransformerLayer(nn.Module):
+ # Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance)
+ def __init__(self, c, num_heads):
+ super().__init__()
+ self.q = nn.Linear(c, c, bias=False)
+ self.k = nn.Linear(c, c, bias=False)
+ self.v = nn.Linear(c, c, bias=False)
+ self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads)
+ self.fc1 = nn.Linear(c, c, bias=False)
+ self.fc2 = nn.Linear(c, c, bias=False)
+
+ def forward(self, x):
+ x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x
+ x = self.fc2(self.fc1(x)) + x
+ return x
+
+
+class TransformerBlock(nn.Module):
+ # Vision Transformer https://arxiv.org/abs/2010.11929
+ def __init__(self, c1, c2, num_heads, num_layers):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+ self.linear = nn.Linear(c2, c2) # learnable position embedding
+ self.tr = nn.Sequential(*[TransformerLayer(c2, num_heads) for _ in range(num_layers)])
+ self.c2 = c2
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ b, _, w, h = x.shape
+ p = x.flatten(2)
+ p = p.unsqueeze(0)
+ p = p.transpose(0, 3)
+ p = p.squeeze(3)
+ e = self.linear(p)
+ x = p + e
+
+ x = self.tr(x)
+ x = x.unsqueeze(3)
+ x = x.transpose(0, 3)
+ x = x.reshape(b, self.c2, w, h)
+ return x
+
+##### end of transformer #####
+
+
+##### yolov5 #####
+
+class Focus(nn.Module):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Focus, self).__init__()
+ self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
+ # self.contract = Contract(gain=2)
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
+ # return self.conv(self.contract(x))
+
+
+class SPPF(nn.Module):
+ # Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
+ def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * 4, c2, 1, 1)
+ self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(torch.cat([x, y1, y2, self.m(y2)], 1))
+
+
+class Contract(nn.Module):
+ # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ N, C, H, W = x.size() # assert (H / s == 0) and (W / s == 0), 'Indivisible gain'
+ s = self.gain
+ x = x.view(N, C, H // s, s, W // s, s) # x(1,64,40,2,40,2)
+ x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
+ return x.view(N, C * s * s, H // s, W // s) # x(1,256,40,40)
+
+
+class Expand(nn.Module):
+ # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ N, C, H, W = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
+ s = self.gain
+ x = x.view(N, s, s, C // s ** 2, H, W) # x(1,2,2,16,80,80)
+ x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
+ return x.view(N, C // s ** 2, H * s, W * s) # x(1,16,160,160)
+
+
+class NMS(nn.Module):
+ # Non-Maximum Suppression (NMS) module
+ conf = 0.25 # confidence threshold
+ iou = 0.45 # IoU threshold
+ classes = None # (optional list) filter by class
+
+ def __init__(self):
+ super(NMS, self).__init__()
+
+ def forward(self, x):
+ return non_max_suppression(x[0], conf_thres=self.conf, iou_thres=self.iou, classes=self.classes)
+
+
+class autoShape(nn.Module):
+ # input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS
+ conf = 0.25 # NMS confidence threshold
+ iou = 0.45 # NMS IoU threshold
+ classes = None # (optional list) filter by class
+
+ def __init__(self, model):
+ super(autoShape, self).__init__()
+ self.model = model.eval()
+
+ def autoshape(self):
+ print('autoShape already enabled, skipping... ') # model already converted to model.autoshape()
+ return self
+
+ @torch.no_grad()
+ def forward(self, imgs, size=640, augment=False, profile=False):
+ # Inference from various sources. For height=640, width=1280, RGB images example inputs are:
+ # filename: imgs = 'data/samples/zidane.jpg'
+ # URI: = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/zidane.jpg'
+ # OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3)
+ # PIL: = Image.open('image.jpg') # HWC x(640,1280,3)
+ # numpy: = np.zeros((640,1280,3)) # HWC
+ # torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values)
+ # multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images
+
+ t = [time_synchronized()]
+ p = next(self.model.parameters()) # for device and type
+ if isinstance(imgs, torch.Tensor): # torch
+ with amp.autocast(enabled=p.device.type != 'cpu'):
+ return self.model(imgs.to(p.device).type_as(p), augment, profile) # inference
+
+ # Pre-process
+ n, imgs = (len(imgs), imgs) if isinstance(imgs, list) else (1, [imgs]) # number of images, list of images
+ shape0, shape1, files = [], [], [] # image and inference shapes, filenames
+ for i, im in enumerate(imgs):
+ f = f'image{i}' # filename
+ if isinstance(im, str): # filename or uri
+ im, f = np.asarray(Image.open(requests.get(im, stream=True).raw if im.startswith('http') else im)), im
+ elif isinstance(im, Image.Image): # PIL Image
+ im, f = np.asarray(im), getattr(im, 'filename', f) or f
+ files.append(Path(f).with_suffix('.jpg').name)
+ if im.shape[0] < 5: # image in CHW
+ im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1)
+ im = im[:, :, :3] if im.ndim == 3 else np.tile(im[:, :, None], 3) # enforce 3ch input
+ s = im.shape[:2] # HWC
+ shape0.append(s) # image shape
+ g = (size / max(s)) # gain
+ shape1.append([y * g for y in s])
+ imgs[i] = im # update
+ shape1 = [make_divisible(x, int(self.stride.max())) for x in np.stack(shape1, 0).max(0)] # inference shape
+ x = [letterbox(im, new_shape=shape1, auto=False)[0] for im in imgs] # pad
+ x = np.stack(x, 0) if n > 1 else x[0][None] # stack
+ x = np.ascontiguousarray(x.transpose((0, 3, 1, 2))) # BHWC to BCHW
+ x = torch.from_numpy(x).to(p.device).type_as(p) / 255. # uint8 to fp16/32
+ t.append(time_synchronized())
+
+ with amp.autocast(enabled=p.device.type != 'cpu'):
+ # Inference
+ y = self.model(x, augment, profile)[0] # forward
+ t.append(time_synchronized())
+
+ # Post-process
+ y = non_max_suppression(y, conf_thres=self.conf, iou_thres=self.iou, classes=self.classes) # NMS
+ for i in range(n):
+ scale_coords(shape1, y[i][:, :4], shape0[i])
+
+ t.append(time_synchronized())
+ return Detections(imgs, y, files, t, self.names, x.shape)
+
+
+class Detections:
+ # detections class for YOLOv5 inference results
+ def __init__(self, imgs, pred, files, times=None, names=None, shape=None):
+ super(Detections, self).__init__()
+ d = pred[0].device # device
+ gn = [torch.tensor([*[im.shape[i] for i in [1, 0, 1, 0]], 1., 1.], device=d) for im in imgs] # normalizations
+ self.imgs = imgs # list of images as numpy arrays
+ self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls)
+ self.names = names # class names
+ self.files = files # image filenames
+ self.xyxy = pred # xyxy pixels
+ self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels
+ self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized
+ self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized
+ self.n = len(self.pred) # number of images (batch size)
+ self.t = tuple((times[i + 1] - times[i]) * 1000 / self.n for i in range(3)) # timestamps (ms)
+ self.s = shape # inference BCHW shape
+
+ def display(self, pprint=False, show=False, save=False, render=False, save_dir=''):
+ colors = color_list()
+ for i, (img, pred) in enumerate(zip(self.imgs, self.pred)):
+ str = f'image {i + 1}/{len(self.pred)}: {img.shape[0]}x{img.shape[1]} '
+ if pred is not None:
+ for c in pred[:, -1].unique():
+ n = (pred[:, -1] == c).sum() # detections per class
+ str += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string
+ if show or save or render:
+ for *box, conf, cls in pred: # xyxy, confidence, class
+ label = f'{self.names[int(cls)]} {conf:.2f}'
+ plot_one_box(box, img, label=label, color=colors[int(cls) % 10])
+ img = Image.fromarray(img.astype(np.uint8)) if isinstance(img, np.ndarray) else img # from np
+ if pprint:
+ print(str.rstrip(', '))
+ if show:
+ img.show(self.files[i]) # show
+ if save:
+ f = self.files[i]
+ img.save(Path(save_dir) / f) # save
+ print(f"{'Saved' * (i == 0)} {f}", end=',' if i < self.n - 1 else f' to {save_dir}\n')
+ if render:
+ self.imgs[i] = np.asarray(img)
+
+ def print(self):
+ self.display(pprint=True) # print results
+ print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {tuple(self.s)}' % self.t)
+
+ def show(self):
+ self.display(show=True) # show results
+
+ def save(self, save_dir='runs/hub/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/hub/exp') # increment save_dir
+ Path(save_dir).mkdir(parents=True, exist_ok=True)
+ self.display(save=True, save_dir=save_dir) # save results
+
+ def render(self):
+ self.display(render=True) # render results
+ return self.imgs
+
+ def pandas(self):
+ # return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0])
+ new = copy(self) # return copy
+ ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns
+ cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns
+ for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]):
+ a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update
+ setattr(new, k, [pd.DataFrame(x, columns=c) for x in a])
+ return new
+
+ def tolist(self):
+ # return a list of Detections objects, i.e. 'for result in results.tolist():'
+ x = [Detections([self.imgs[i]], [self.pred[i]], self.names, self.s) for i in range(self.n)]
+ for d in x:
+ for k in ['imgs', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']:
+ setattr(d, k, getattr(d, k)[0]) # pop out of list
+ return x
+
+ def __len__(self):
+ return self.n
+
+
+class Classify(nn.Module):
+ # Classification head, i.e. x(b,c1,20,20) to x(b,c2)
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Classify, self).__init__()
+ self.aap = nn.AdaptiveAvgPool2d(1) # to x(b,c1,1,1)
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g) # to x(b,c2,1,1)
+ self.flat = nn.Flatten()
+
+ def forward(self, x):
+ z = torch.cat([self.aap(y) for y in (x if isinstance(x, list) else [x])], 1) # cat if list
+ return self.flat(self.conv(z)) # flatten to x(b,c2)
+
+##### end of yolov5 ######
+
+
+##### orepa #####
+
+def transI_fusebn(kernel, bn):
+ gamma = bn.weight
+ std = (bn.running_var + bn.eps).sqrt()
+ return kernel * ((gamma / std).reshape(-1, 1, 1, 1)), bn.bias - bn.running_mean * gamma / std
+
+
+class ConvBN(nn.Module):
+ def __init__(self, in_channels, out_channels, kernel_size,
+ stride=1, padding=0, dilation=1, groups=1, deploy=False, nonlinear=None):
+ super().__init__()
+ if nonlinear is None:
+ self.nonlinear = nn.Identity()
+ else:
+ self.nonlinear = nonlinear
+ if deploy:
+ self.conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
+ stride=stride, padding=padding, dilation=dilation, groups=groups, bias=True)
+ else:
+ self.conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
+ stride=stride, padding=padding, dilation=dilation, groups=groups, bias=False)
+ self.bn = nn.BatchNorm2d(num_features=out_channels)
+
+ def forward(self, x):
+ if hasattr(self, 'bn'):
+ return self.nonlinear(self.bn(self.conv(x)))
+ else:
+ return self.nonlinear(self.conv(x))
+
+ def switch_to_deploy(self):
+ kernel, bias = transI_fusebn(self.conv.weight, self.bn)
+ conv = nn.Conv2d(in_channels=self.conv.in_channels, out_channels=self.conv.out_channels, kernel_size=self.conv.kernel_size,
+ stride=self.conv.stride, padding=self.conv.padding, dilation=self.conv.dilation, groups=self.conv.groups, bias=True)
+ conv.weight.data = kernel
+ conv.bias.data = bias
+ for para in self.parameters():
+ para.detach_()
+ self.__delattr__('conv')
+ self.__delattr__('bn')
+ self.conv = conv
+
+class OREPA_3x3_RepConv(nn.Module):
+
+ def __init__(self, in_channels, out_channels, kernel_size,
+ stride=1, padding=0, dilation=1, groups=1,
+ internal_channels_1x1_3x3=None,
+ deploy=False, nonlinear=None, single_init=False):
+ super(OREPA_3x3_RepConv, self).__init__()
+ self.deploy = deploy
+
+ if nonlinear is None:
+ self.nonlinear = nn.Identity()
+ else:
+ self.nonlinear = nonlinear
+
+ self.kernel_size = kernel_size
+ self.in_channels = in_channels
+ self.out_channels = out_channels
+ self.groups = groups
+ assert padding == kernel_size // 2
+
+ self.stride = stride
+ self.padding = padding
+ self.dilation = dilation
+
+ self.branch_counter = 0
+
+ self.weight_rbr_origin = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), kernel_size, kernel_size))
+ nn.init.kaiming_uniform_(self.weight_rbr_origin, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+
+ if groups < out_channels:
+ self.weight_rbr_avg_conv = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), 1, 1))
+ self.weight_rbr_pfir_conv = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_avg_conv, a=1.0)
+ nn.init.kaiming_uniform_(self.weight_rbr_pfir_conv, a=1.0)
+ self.weight_rbr_avg_conv.data
+ self.weight_rbr_pfir_conv.data
+ self.register_buffer('weight_rbr_avg_avg', torch.ones(kernel_size, kernel_size).mul(1.0/kernel_size/kernel_size))
+ self.branch_counter += 1
+
+ else:
+ raise NotImplementedError
+ self.branch_counter += 1
+
+ if internal_channels_1x1_3x3 is None:
+ internal_channels_1x1_3x3 = in_channels if groups < out_channels else 2 * in_channels # For mobilenet, it is better to have 2X internal channels
+
+ if internal_channels_1x1_3x3 == in_channels:
+ self.weight_rbr_1x1_kxk_idconv1 = nn.Parameter(torch.zeros(in_channels, int(in_channels/self.groups), 1, 1))
+ id_value = np.zeros((in_channels, int(in_channels/self.groups), 1, 1))
+ for i in range(in_channels):
+ id_value[i, i % int(in_channels/self.groups), 0, 0] = 1
+ id_tensor = torch.from_numpy(id_value).type_as(self.weight_rbr_1x1_kxk_idconv1)
+ self.register_buffer('id_tensor', id_tensor)
+
+ else:
+ self.weight_rbr_1x1_kxk_conv1 = nn.Parameter(torch.Tensor(internal_channels_1x1_3x3, int(in_channels/self.groups), 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_1x1_kxk_conv1, a=math.sqrt(1.0))
+ self.weight_rbr_1x1_kxk_conv2 = nn.Parameter(torch.Tensor(out_channels, int(internal_channels_1x1_3x3/self.groups), kernel_size, kernel_size))
+ nn.init.kaiming_uniform_(self.weight_rbr_1x1_kxk_conv2, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+ expand_ratio = 8
+ self.weight_rbr_gconv_dw = nn.Parameter(torch.Tensor(in_channels*expand_ratio, 1, kernel_size, kernel_size))
+ self.weight_rbr_gconv_pw = nn.Parameter(torch.Tensor(out_channels, in_channels*expand_ratio, 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_gconv_dw, a=math.sqrt(1.0))
+ nn.init.kaiming_uniform_(self.weight_rbr_gconv_pw, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+ if out_channels == in_channels and stride == 1:
+ self.branch_counter += 1
+
+ self.vector = nn.Parameter(torch.Tensor(self.branch_counter, self.out_channels))
+ self.bn = nn.BatchNorm2d(out_channels)
+
+ self.fre_init()
+
+ nn.init.constant_(self.vector[0, :], 0.25) #origin
+ nn.init.constant_(self.vector[1, :], 0.25) #avg
+ nn.init.constant_(self.vector[2, :], 0.0) #prior
+ nn.init.constant_(self.vector[3, :], 0.5) #1x1_kxk
+ nn.init.constant_(self.vector[4, :], 0.5) #dws_conv
+
+
+ def fre_init(self):
+ prior_tensor = torch.Tensor(self.out_channels, self.kernel_size, self.kernel_size)
+ half_fg = self.out_channels/2
+ for i in range(self.out_channels):
+ for h in range(3):
+ for w in range(3):
+ if i < half_fg:
+ prior_tensor[i, h, w] = math.cos(math.pi*(h+0.5)*(i+1)/3)
+ else:
+ prior_tensor[i, h, w] = math.cos(math.pi*(w+0.5)*(i+1-half_fg)/3)
+
+ self.register_buffer('weight_rbr_prior', prior_tensor)
+
+ def weight_gen(self):
+
+ weight_rbr_origin = torch.einsum('oihw,o->oihw', self.weight_rbr_origin, self.vector[0, :])
+
+ weight_rbr_avg = torch.einsum('oihw,o->oihw', torch.einsum('oihw,hw->oihw', self.weight_rbr_avg_conv, self.weight_rbr_avg_avg), self.vector[1, :])
+
+ weight_rbr_pfir = torch.einsum('oihw,o->oihw', torch.einsum('oihw,ohw->oihw', self.weight_rbr_pfir_conv, self.weight_rbr_prior), self.vector[2, :])
+
+ weight_rbr_1x1_kxk_conv1 = None
+ if hasattr(self, 'weight_rbr_1x1_kxk_idconv1'):
+ weight_rbr_1x1_kxk_conv1 = (self.weight_rbr_1x1_kxk_idconv1 + self.id_tensor).squeeze()
+ elif hasattr(self, 'weight_rbr_1x1_kxk_conv1'):
+ weight_rbr_1x1_kxk_conv1 = self.weight_rbr_1x1_kxk_conv1.squeeze()
+ else:
+ raise NotImplementedError
+ weight_rbr_1x1_kxk_conv2 = self.weight_rbr_1x1_kxk_conv2
+
+ if self.groups > 1:
+ g = self.groups
+ t, ig = weight_rbr_1x1_kxk_conv1.size()
+ o, tg, h, w = weight_rbr_1x1_kxk_conv2.size()
+ weight_rbr_1x1_kxk_conv1 = weight_rbr_1x1_kxk_conv1.view(g, int(t/g), ig)
+ weight_rbr_1x1_kxk_conv2 = weight_rbr_1x1_kxk_conv2.view(g, int(o/g), tg, h, w)
+ weight_rbr_1x1_kxk = torch.einsum('gti,gothw->goihw', weight_rbr_1x1_kxk_conv1, weight_rbr_1x1_kxk_conv2).view(o, ig, h, w)
+ else:
+ weight_rbr_1x1_kxk = torch.einsum('ti,othw->oihw', weight_rbr_1x1_kxk_conv1, weight_rbr_1x1_kxk_conv2)
+
+ weight_rbr_1x1_kxk = torch.einsum('oihw,o->oihw', weight_rbr_1x1_kxk, self.vector[3, :])
+
+ weight_rbr_gconv = self.dwsc2full(self.weight_rbr_gconv_dw, self.weight_rbr_gconv_pw, self.in_channels)
+ weight_rbr_gconv = torch.einsum('oihw,o->oihw', weight_rbr_gconv, self.vector[4, :])
+
+ weight = weight_rbr_origin + weight_rbr_avg + weight_rbr_1x1_kxk + weight_rbr_pfir + weight_rbr_gconv
+
+ return weight
+
+ def dwsc2full(self, weight_dw, weight_pw, groups):
+
+ t, ig, h, w = weight_dw.size()
+ o, _, _, _ = weight_pw.size()
+ tg = int(t/groups)
+ i = int(ig*groups)
+ weight_dw = weight_dw.view(groups, tg, ig, h, w)
+ weight_pw = weight_pw.squeeze().view(o, groups, tg)
+
+ weight_dsc = torch.einsum('gtihw,ogt->ogihw', weight_dw, weight_pw)
+ return weight_dsc.view(o, i, h, w)
+
+ def forward(self, inputs):
+ weight = self.weight_gen()
+ out = F.conv2d(inputs, weight, bias=None, stride=self.stride, padding=self.padding, dilation=self.dilation, groups=self.groups)
+
+ return self.nonlinear(self.bn(out))
+
+class RepConv_OREPA(nn.Module):
+
+ def __init__(self, c1, c2, k=3, s=1, padding=1, dilation=1, groups=1, padding_mode='zeros', deploy=False, use_se=False, nonlinear=nn.SiLU()):
+ super(RepConv_OREPA, self).__init__()
+ self.deploy = deploy
+ self.groups = groups
+ self.in_channels = c1
+ self.out_channels = c2
+
+ self.padding = padding
+ self.dilation = dilation
+ self.groups = groups
+
+ assert k == 3
+ assert padding == 1
+
+ padding_11 = padding - k // 2
+
+ if nonlinear is None:
+ self.nonlinearity = nn.Identity()
+ else:
+ self.nonlinearity = nonlinear
+
+ if use_se:
+ self.se = SEBlock(self.out_channels, internal_neurons=self.out_channels // 16)
+ else:
+ self.se = nn.Identity()
+
+ if deploy:
+ self.rbr_reparam = nn.Conv2d(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=k, stride=s,
+ padding=padding, dilation=dilation, groups=groups, bias=True, padding_mode=padding_mode)
+
+ else:
+ self.rbr_identity = nn.BatchNorm2d(num_features=self.in_channels) if self.out_channels == self.in_channels and s == 1 else None
+ self.rbr_dense = OREPA_3x3_RepConv(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=k, stride=s, padding=padding, groups=groups, dilation=1)
+ self.rbr_1x1 = ConvBN(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=1, stride=s, padding=padding_11, groups=groups, dilation=1)
+ print('RepVGG Block, identity = ', self.rbr_identity)
+
+
+ def forward(self, inputs):
+ if hasattr(self, 'rbr_reparam'):
+ return self.nonlinearity(self.se(self.rbr_reparam(inputs)))
+
+ if self.rbr_identity is None:
+ id_out = 0
+ else:
+ id_out = self.rbr_identity(inputs)
+
+ out1 = self.rbr_dense(inputs)
+ out2 = self.rbr_1x1(inputs)
+ out3 = id_out
+ out = out1 + out2 + out3
+
+ return self.nonlinearity(self.se(out))
+
+
+ # Optional. This improves the accuracy and facilitates quantization.
+ # 1. Cancel the original weight decay on rbr_dense.conv.weight and rbr_1x1.conv.weight.
+ # 2. Use like this.
+ # loss = criterion(....)
+ # for every RepVGGBlock blk:
+ # loss += weight_decay_coefficient * 0.5 * blk.get_cust_L2()
+ # optimizer.zero_grad()
+ # loss.backward()
+
+ # Not used for OREPA
+ def get_custom_L2(self):
+ K3 = self.rbr_dense.weight_gen()
+ K1 = self.rbr_1x1.conv.weight
+ t3 = (self.rbr_dense.bn.weight / ((self.rbr_dense.bn.running_var + self.rbr_dense.bn.eps).sqrt())).reshape(-1, 1, 1, 1).detach()
+ t1 = (self.rbr_1x1.bn.weight / ((self.rbr_1x1.bn.running_var + self.rbr_1x1.bn.eps).sqrt())).reshape(-1, 1, 1, 1).detach()
+
+ l2_loss_circle = (K3 ** 2).sum() - (K3[:, :, 1:2, 1:2] ** 2).sum() # The L2 loss of the "circle" of weights in 3x3 kernel. Use regular L2 on them.
+ eq_kernel = K3[:, :, 1:2, 1:2] * t3 + K1 * t1 # The equivalent resultant central point of 3x3 kernel.
+ l2_loss_eq_kernel = (eq_kernel ** 2 / (t3 ** 2 + t1 ** 2)).sum() # Normalize for an L2 coefficient comparable to regular L2.
+ return l2_loss_eq_kernel + l2_loss_circle
+
+ def get_equivalent_kernel_bias(self):
+ kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense)
+ kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1)
+ kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity)
+ return kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1) + kernelid, bias3x3 + bias1x1 + biasid
+
+ def _pad_1x1_to_3x3_tensor(self, kernel1x1):
+ if kernel1x1 is None:
+ return 0
+ else:
+ return torch.nn.functional.pad(kernel1x1, [1,1,1,1])
+
+ def _fuse_bn_tensor(self, branch):
+ if branch is None:
+ return 0, 0
+ if not isinstance(branch, nn.BatchNorm2d):
+ if isinstance(branch, OREPA_3x3_RepConv):
+ kernel = branch.weight_gen()
+ elif isinstance(branch, ConvBN):
+ kernel = branch.conv.weight
+ else:
+ raise NotImplementedError
+ running_mean = branch.bn.running_mean
+ running_var = branch.bn.running_var
+ gamma = branch.bn.weight
+ beta = branch.bn.bias
+ eps = branch.bn.eps
+ else:
+ if not hasattr(self, 'id_tensor'):
+ input_dim = self.in_channels // self.groups
+ kernel_value = np.zeros((self.in_channels, input_dim, 3, 3), dtype=np.float32)
+ for i in range(self.in_channels):
+ kernel_value[i, i % input_dim, 1, 1] = 1
+ self.id_tensor = torch.from_numpy(kernel_value).to(branch.weight.device)
+ kernel = self.id_tensor
+ running_mean = branch.running_mean
+ running_var = branch.running_var
+ gamma = branch.weight
+ beta = branch.bias
+ eps = branch.eps
+ std = (running_var + eps).sqrt()
+ t = (gamma / std).reshape(-1, 1, 1, 1)
+ return kernel * t, beta - running_mean * gamma / std
+
+ def switch_to_deploy(self):
+ if hasattr(self, 'rbr_reparam'):
+ return
+ print(f"RepConv_OREPA.switch_to_deploy")
+ kernel, bias = self.get_equivalent_kernel_bias()
+ self.rbr_reparam = nn.Conv2d(in_channels=self.rbr_dense.in_channels, out_channels=self.rbr_dense.out_channels,
+ kernel_size=self.rbr_dense.kernel_size, stride=self.rbr_dense.stride,
+ padding=self.rbr_dense.padding, dilation=self.rbr_dense.dilation, groups=self.rbr_dense.groups, bias=True)
+ self.rbr_reparam.weight.data = kernel
+ self.rbr_reparam.bias.data = bias
+ for para in self.parameters():
+ para.detach_()
+ self.__delattr__('rbr_dense')
+ self.__delattr__('rbr_1x1')
+ if hasattr(self, 'rbr_identity'):
+ self.__delattr__('rbr_identity')
+
+##### end of orepa #####
+
+
+##### swin transformer #####
+
+class WindowAttention(nn.Module):
+
+ def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):
+
+ super().__init__()
+ self.dim = dim
+ self.window_size = window_size # Wh, Ww
+ self.num_heads = num_heads
+ head_dim = dim // num_heads
+ self.scale = qk_scale or head_dim ** -0.5
+
+ # define a parameter table of relative position bias
+ self.relative_position_bias_table = nn.Parameter(
+ torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nH
+
+ # get pair-wise relative position index for each token inside the window
+ coords_h = torch.arange(self.window_size[0])
+ coords_w = torch.arange(self.window_size[1])
+ coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
+ coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
+ relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
+ relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
+ relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
+ relative_coords[:, :, 1] += self.window_size[1] - 1
+ relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
+ relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
+ self.register_buffer("relative_position_index", relative_position_index)
+
+ self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
+ self.attn_drop = nn.Dropout(attn_drop)
+ self.proj = nn.Linear(dim, dim)
+ self.proj_drop = nn.Dropout(proj_drop)
+
+ nn.init.normal_(self.relative_position_bias_table, std=.02)
+ self.softmax = nn.Softmax(dim=-1)
+
+ def forward(self, x, mask=None):
+
+ B_, N, C = x.shape
+ qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
+ q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
+
+ q = q * self.scale
+ attn = (q @ k.transpose(-2, -1))
+
+ relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(
+ self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
+ relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
+ attn = attn + relative_position_bias.unsqueeze(0)
+
+ if mask is not None:
+ nW = mask.shape[0]
+ attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
+ attn = attn.view(-1, self.num_heads, N, N)
+ attn = self.softmax(attn)
+ else:
+ attn = self.softmax(attn)
+
+ attn = self.attn_drop(attn)
+
+ # print(attn.dtype, v.dtype)
+ try:
+ x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
+ except:
+ #print(attn.dtype, v.dtype)
+ x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)
+ x = self.proj(x)
+ x = self.proj_drop(x)
+ return x
+
+class Mlp(nn.Module):
+
+ def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):
+ super().__init__()
+ out_features = out_features or in_features
+ hidden_features = hidden_features or in_features
+ self.fc1 = nn.Linear(in_features, hidden_features)
+ self.act = act_layer()
+ self.fc2 = nn.Linear(hidden_features, out_features)
+ self.drop = nn.Dropout(drop)
+
+ def forward(self, x):
+ x = self.fc1(x)
+ x = self.act(x)
+ x = self.drop(x)
+ x = self.fc2(x)
+ x = self.drop(x)
+ return x
+
+def window_partition(x, window_size):
+
+ B, H, W, C = x.shape
+ assert H % window_size == 0, 'feature map h and w can not divide by window size'
+ x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
+ windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
+ return windows
+
+def window_reverse(windows, window_size, H, W):
+
+ B = int(windows.shape[0] / (H * W / window_size / window_size))
+ x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
+ x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
+ return x
+
+
+class SwinTransformerLayer(nn.Module):
+
+ def __init__(self, dim, num_heads, window_size=8, shift_size=0,
+ mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0.,
+ act_layer=nn.SiLU, norm_layer=nn.LayerNorm):
+ super().__init__()
+ self.dim = dim
+ self.num_heads = num_heads
+ self.window_size = window_size
+ self.shift_size = shift_size
+ self.mlp_ratio = mlp_ratio
+ # if min(self.input_resolution) <= self.window_size:
+ # # if window size is larger than input resolution, we don't partition windows
+ # self.shift_size = 0
+ # self.window_size = min(self.input_resolution)
+ assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
+
+ self.norm1 = norm_layer(dim)
+ self.attn = WindowAttention(
+ dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,
+ qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)
+
+ self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
+ self.norm2 = norm_layer(dim)
+ mlp_hidden_dim = int(dim * mlp_ratio)
+ self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
+
+ def create_mask(self, H, W):
+ # calculate attention mask for SW-MSA
+ img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
+ h_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ w_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ cnt = 0
+ for h in h_slices:
+ for w in w_slices:
+ img_mask[:, h, w, :] = cnt
+ cnt += 1
+
+ mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
+ mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
+ attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
+ attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
+
+ return attn_mask
+
+ def forward(self, x):
+ # reshape x[b c h w] to x[b l c]
+ _, _, H_, W_ = x.shape
+
+ Padding = False
+ if min(H_, W_) < self.window_size or H_ % self.window_size!=0 or W_ % self.window_size!=0:
+ Padding = True
+ # print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')
+ pad_r = (self.window_size - W_ % self.window_size) % self.window_size
+ pad_b = (self.window_size - H_ % self.window_size) % self.window_size
+ x = F.pad(x, (0, pad_r, 0, pad_b))
+
+ # print('2', x.shape)
+ B, C, H, W = x.shape
+ L = H * W
+ x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c
+
+ # create mask from init to forward
+ if self.shift_size > 0:
+ attn_mask = self.create_mask(H, W).to(x.device)
+ else:
+ attn_mask = None
+
+ shortcut = x
+ x = self.norm1(x)
+ x = x.view(B, H, W, C)
+
+ # cyclic shift
+ if self.shift_size > 0:
+ shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
+ else:
+ shifted_x = x
+
+ # partition windows
+ x_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, C
+ x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
+
+ # W-MSA/SW-MSA
+ attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C
+
+ # merge windows
+ attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
+ shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' C
+
+ # reverse cyclic shift
+ if self.shift_size > 0:
+ x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
+ else:
+ x = shifted_x
+ x = x.view(B, H * W, C)
+
+ # FFN
+ x = shortcut + self.drop_path(x)
+ x = x + self.drop_path(self.mlp(self.norm2(x)))
+
+ x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w
+
+ if Padding:
+ x = x[:, :, :H_, :W_] # reverse padding
+
+ return x
+
+
+class SwinTransformerBlock(nn.Module):
+ def __init__(self, c1, c2, num_heads, num_layers, window_size=8):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+
+ # remove input_resolution
+ self.blocks = nn.Sequential(*[SwinTransformerLayer(dim=c2, num_heads=num_heads, window_size=window_size,
+ shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)])
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ x = self.blocks(x)
+ return x
+
+
+class STCSPA(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class STCSPB(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class STCSPC(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+##### end of swin transformer #####
+
+
+##### swin transformer v2 #####
+
+class WindowAttention_v2(nn.Module):
+
+ def __init__(self, dim, window_size, num_heads, qkv_bias=True, attn_drop=0., proj_drop=0.,
+ pretrained_window_size=[0, 0]):
+
+ super().__init__()
+ self.dim = dim
+ self.window_size = window_size # Wh, Ww
+ self.pretrained_window_size = pretrained_window_size
+ self.num_heads = num_heads
+
+ self.logit_scale = nn.Parameter(torch.log(10 * torch.ones((num_heads, 1, 1))), requires_grad=True)
+
+ # mlp to generate continuous relative position bias
+ self.cpb_mlp = nn.Sequential(nn.Linear(2, 512, bias=True),
+ nn.ReLU(inplace=True),
+ nn.Linear(512, num_heads, bias=False))
+
+ # get relative_coords_table
+ relative_coords_h = torch.arange(-(self.window_size[0] - 1), self.window_size[0], dtype=torch.float32)
+ relative_coords_w = torch.arange(-(self.window_size[1] - 1), self.window_size[1], dtype=torch.float32)
+ relative_coords_table = torch.stack(
+ torch.meshgrid([relative_coords_h,
+ relative_coords_w])).permute(1, 2, 0).contiguous().unsqueeze(0) # 1, 2*Wh-1, 2*Ww-1, 2
+ if pretrained_window_size[0] > 0:
+ relative_coords_table[:, :, :, 0] /= (pretrained_window_size[0] - 1)
+ relative_coords_table[:, :, :, 1] /= (pretrained_window_size[1] - 1)
+ else:
+ relative_coords_table[:, :, :, 0] /= (self.window_size[0] - 1)
+ relative_coords_table[:, :, :, 1] /= (self.window_size[1] - 1)
+ relative_coords_table *= 8 # normalize to -8, 8
+ relative_coords_table = torch.sign(relative_coords_table) * torch.log2(
+ torch.abs(relative_coords_table) + 1.0) / np.log2(8)
+
+ self.register_buffer("relative_coords_table", relative_coords_table)
+
+ # get pair-wise relative position index for each token inside the window
+ coords_h = torch.arange(self.window_size[0])
+ coords_w = torch.arange(self.window_size[1])
+ coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
+ coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
+ relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
+ relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
+ relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
+ relative_coords[:, :, 1] += self.window_size[1] - 1
+ relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
+ relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
+ self.register_buffer("relative_position_index", relative_position_index)
+
+ self.qkv = nn.Linear(dim, dim * 3, bias=False)
+ if qkv_bias:
+ self.q_bias = nn.Parameter(torch.zeros(dim))
+ self.v_bias = nn.Parameter(torch.zeros(dim))
+ else:
+ self.q_bias = None
+ self.v_bias = None
+ self.attn_drop = nn.Dropout(attn_drop)
+ self.proj = nn.Linear(dim, dim)
+ self.proj_drop = nn.Dropout(proj_drop)
+ self.softmax = nn.Softmax(dim=-1)
+
+ def forward(self, x, mask=None):
+
+ B_, N, C = x.shape
+ qkv_bias = None
+ if self.q_bias is not None:
+ qkv_bias = torch.cat((self.q_bias, torch.zeros_like(self.v_bias, requires_grad=False), self.v_bias))
+ qkv = F.linear(input=x, weight=self.qkv.weight, bias=qkv_bias)
+ qkv = qkv.reshape(B_, N, 3, self.num_heads, -1).permute(2, 0, 3, 1, 4)
+ q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
+
+ # cosine attention
+ attn = (F.normalize(q, dim=-1) @ F.normalize(k, dim=-1).transpose(-2, -1))
+ logit_scale = torch.clamp(self.logit_scale, max=torch.log(torch.tensor(1. / 0.01))).exp()
+ attn = attn * logit_scale
+
+ relative_position_bias_table = self.cpb_mlp(self.relative_coords_table).view(-1, self.num_heads)
+ relative_position_bias = relative_position_bias_table[self.relative_position_index.view(-1)].view(
+ self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
+ relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
+ relative_position_bias = 16 * torch.sigmoid(relative_position_bias)
+ attn = attn + relative_position_bias.unsqueeze(0)
+
+ if mask is not None:
+ nW = mask.shape[0]
+ attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
+ attn = attn.view(-1, self.num_heads, N, N)
+ attn = self.softmax(attn)
+ else:
+ attn = self.softmax(attn)
+
+ attn = self.attn_drop(attn)
+
+ try:
+ x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
+ except:
+ x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)
+
+ x = self.proj(x)
+ x = self.proj_drop(x)
+ return x
+
+ def extra_repr(self) -> str:
+ return f'dim={self.dim}, window_size={self.window_size}, ' \
+ f'pretrained_window_size={self.pretrained_window_size}, num_heads={self.num_heads}'
+
+ def flops(self, N):
+ # calculate flops for 1 window with token length of N
+ flops = 0
+ # qkv = self.qkv(x)
+ flops += N * self.dim * 3 * self.dim
+ # attn = (q @ k.transpose(-2, -1))
+ flops += self.num_heads * N * (self.dim // self.num_heads) * N
+ # x = (attn @ v)
+ flops += self.num_heads * N * N * (self.dim // self.num_heads)
+ # x = self.proj(x)
+ flops += N * self.dim * self.dim
+ return flops
+
+class Mlp_v2(nn.Module):
+ def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):
+ super().__init__()
+ out_features = out_features or in_features
+ hidden_features = hidden_features or in_features
+ self.fc1 = nn.Linear(in_features, hidden_features)
+ self.act = act_layer()
+ self.fc2 = nn.Linear(hidden_features, out_features)
+ self.drop = nn.Dropout(drop)
+
+ def forward(self, x):
+ x = self.fc1(x)
+ x = self.act(x)
+ x = self.drop(x)
+ x = self.fc2(x)
+ x = self.drop(x)
+ return x
+
+
+def window_partition_v2(x, window_size):
+
+ B, H, W, C = x.shape
+ x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
+ windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
+ return windows
+
+
+def window_reverse_v2(windows, window_size, H, W):
+
+ B = int(windows.shape[0] / (H * W / window_size / window_size))
+ x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
+ x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
+ return x
+
+
+class SwinTransformerLayer_v2(nn.Module):
+
+ def __init__(self, dim, num_heads, window_size=7, shift_size=0,
+ mlp_ratio=4., qkv_bias=True, drop=0., attn_drop=0., drop_path=0.,
+ act_layer=nn.SiLU, norm_layer=nn.LayerNorm, pretrained_window_size=0):
+ super().__init__()
+ self.dim = dim
+ #self.input_resolution = input_resolution
+ self.num_heads = num_heads
+ self.window_size = window_size
+ self.shift_size = shift_size
+ self.mlp_ratio = mlp_ratio
+ #if min(self.input_resolution) <= self.window_size:
+ # # if window size is larger than input resolution, we don't partition windows
+ # self.shift_size = 0
+ # self.window_size = min(self.input_resolution)
+ assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
+
+ self.norm1 = norm_layer(dim)
+ self.attn = WindowAttention_v2(
+ dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,
+ qkv_bias=qkv_bias, attn_drop=attn_drop, proj_drop=drop,
+ pretrained_window_size=(pretrained_window_size, pretrained_window_size))
+
+ self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
+ self.norm2 = norm_layer(dim)
+ mlp_hidden_dim = int(dim * mlp_ratio)
+ self.mlp = Mlp_v2(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
+
+ def create_mask(self, H, W):
+ # calculate attention mask for SW-MSA
+ img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
+ h_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ w_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ cnt = 0
+ for h in h_slices:
+ for w in w_slices:
+ img_mask[:, h, w, :] = cnt
+ cnt += 1
+
+ mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
+ mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
+ attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
+ attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
+
+ return attn_mask
+
+ def forward(self, x):
+ # reshape x[b c h w] to x[b l c]
+ _, _, H_, W_ = x.shape
+
+ Padding = False
+ if min(H_, W_) < self.window_size or H_ % self.window_size!=0 or W_ % self.window_size!=0:
+ Padding = True
+ # print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')
+ pad_r = (self.window_size - W_ % self.window_size) % self.window_size
+ pad_b = (self.window_size - H_ % self.window_size) % self.window_size
+ x = F.pad(x, (0, pad_r, 0, pad_b))
+
+ # print('2', x.shape)
+ B, C, H, W = x.shape
+ L = H * W
+ x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c
+
+ # create mask from init to forward
+ if self.shift_size > 0:
+ attn_mask = self.create_mask(H, W).to(x.device)
+ else:
+ attn_mask = None
+
+ shortcut = x
+ x = x.view(B, H, W, C)
+
+ # cyclic shift
+ if self.shift_size > 0:
+ shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
+ else:
+ shifted_x = x
+
+ # partition windows
+ x_windows = window_partition_v2(shifted_x, self.window_size) # nW*B, window_size, window_size, C
+ x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
+
+ # W-MSA/SW-MSA
+ attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C
+
+ # merge windows
+ attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
+ shifted_x = window_reverse_v2(attn_windows, self.window_size, H, W) # B H' W' C
+
+ # reverse cyclic shift
+ if self.shift_size > 0:
+ x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
+ else:
+ x = shifted_x
+ x = x.view(B, H * W, C)
+ x = shortcut + self.drop_path(self.norm1(x))
+
+ # FFN
+ x = x + self.drop_path(self.norm2(self.mlp(x)))
+ x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w
+
+ if Padding:
+ x = x[:, :, :H_, :W_] # reverse padding
+
+ return x
+
+ def extra_repr(self) -> str:
+ return f"dim={self.dim}, input_resolution={self.input_resolution}, num_heads={self.num_heads}, " \
+ f"window_size={self.window_size}, shift_size={self.shift_size}, mlp_ratio={self.mlp_ratio}"
+
+ def flops(self):
+ flops = 0
+ H, W = self.input_resolution
+ # norm1
+ flops += self.dim * H * W
+ # W-MSA/SW-MSA
+ nW = H * W / self.window_size / self.window_size
+ flops += nW * self.attn.flops(self.window_size * self.window_size)
+ # mlp
+ flops += 2 * H * W * self.dim * self.dim * self.mlp_ratio
+ # norm2
+ flops += self.dim * H * W
+ return flops
+
+
+class SwinTransformer2Block(nn.Module):
+ def __init__(self, c1, c2, num_heads, num_layers, window_size=7):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+
+ # remove input_resolution
+ self.blocks = nn.Sequential(*[SwinTransformerLayer_v2(dim=c2, num_heads=num_heads, window_size=window_size,
+ shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)])
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ x = self.blocks(x)
+ return x
+
+
+class ST2CSPA(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class ST2CSPB(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class ST2CSPC(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+##### end of swin transformer v2 #####
diff --git a/oneAPI_ODAV_APP/models/experimental.py b/oneAPI_ODAV_APP/models/experimental.py
new file mode 100644
index 000000000..7ee57156b
--- /dev/null
+++ b/oneAPI_ODAV_APP/models/experimental.py
@@ -0,0 +1,273 @@
+import numpy as np
+import random
+import torch
+import torch.nn as nn
+
+
+from models.common import Conv, DWConv
+from utils.google_utils import attempt_download
+
+
+class CrossConv(nn.Module):
+ # Cross Convolution Downsample
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False):
+ # ch_in, ch_out, kernel, stride, groups, expansion, shortcut
+ super(CrossConv, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, (1, k), (1, s))
+ self.cv2 = Conv(c_, c2, (k, 1), (s, 1), g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class Sum(nn.Module):
+ # Weighted sum of 2 or more layers https://arxiv.org/abs/1911.09070
+ def __init__(self, n, weight=False): # n: number of inputs
+ super(Sum, self).__init__()
+ self.weight = weight # apply weights boolean
+ self.iter = range(n - 1) # iter object
+ if weight:
+ self.w = nn.Parameter(-torch.arange(1., n) / 2, requires_grad=True) # layer weights
+
+ def forward(self, x):
+ y = x[0] # no weight
+ if self.weight:
+ w = torch.sigmoid(self.w) * 2
+ for i in self.iter:
+ y = y + x[i + 1] * w[i]
+ else:
+ for i in self.iter:
+ y = y + x[i + 1]
+ return y
+
+
+class MixConv2d(nn.Module):
+ # Mixed Depthwise Conv https://arxiv.org/abs/1907.09595
+ def __init__(self, c1, c2, k=(1, 3), s=1, equal_ch=True):
+ super(MixConv2d, self).__init__()
+ groups = len(k)
+ if equal_ch: # equal c_ per group
+ i = torch.linspace(0, groups - 1E-6, c2).floor() # c2 indices
+ c_ = [(i == g).sum() for g in range(groups)] # intermediate channels
+ else: # equal weight.numel() per group
+ b = [c2] + [0] * groups
+ a = np.eye(groups + 1, groups, k=-1)
+ a -= np.roll(a, 1, axis=1)
+ a *= np.array(k) ** 2
+ a[0] = 1
+ c_ = np.linalg.lstsq(a, b, rcond=None)[0].round() # solve for equal weight indices, ax = b
+
+ self.m = nn.ModuleList([nn.Conv2d(c1, int(c_[g]), k[g], s, k[g] // 2, bias=False) for g in range(groups)])
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.LeakyReLU(0.1, inplace=True)
+
+ def forward(self, x):
+ return x + self.act(self.bn(torch.cat([m(x) for m in self.m], 1)))
+
+
+class Ensemble(nn.ModuleList):
+ # Ensemble of models
+ def __init__(self):
+ super(Ensemble, self).__init__()
+
+ def forward(self, x, augment=False):
+ y = []
+ for module in self:
+ y.append(module(x, augment)[0])
+ # y = torch.stack(y).max(0)[0] # max ensemble
+ # y = torch.stack(y).mean(0) # mean ensemble
+ y = torch.cat(y, 1) # nms ensemble
+ return y, None # inference, train output
+
+
+
+
+
+class ORT_NMS(torch.autograd.Function):
+ '''ONNX-Runtime NMS operation'''
+ @staticmethod
+ def forward(ctx,
+ boxes,
+ scores,
+ max_output_boxes_per_class=torch.tensor([100]),
+ iou_threshold=torch.tensor([0.45]),
+ score_threshold=torch.tensor([0.25])):
+ device = boxes.device
+ batch = scores.shape[0]
+ num_det = random.randint(0, 100)
+ batches = torch.randint(0, batch, (num_det,)).sort()[0].to(device)
+ idxs = torch.arange(100, 100 + num_det).to(device)
+ zeros = torch.zeros((num_det,), dtype=torch.int64).to(device)
+ selected_indices = torch.cat([batches[None], zeros[None], idxs[None]], 0).T.contiguous()
+ selected_indices = selected_indices.to(torch.int64)
+ return selected_indices
+
+ @staticmethod
+ def symbolic(g, boxes, scores, max_output_boxes_per_class, iou_threshold, score_threshold):
+ return g.op("NonMaxSuppression", boxes, scores, max_output_boxes_per_class, iou_threshold, score_threshold)
+
+
+class TRT_NMS(torch.autograd.Function):
+ '''TensorRT NMS operation'''
+ @staticmethod
+ def forward(
+ ctx,
+ boxes,
+ scores,
+ background_class=-1,
+ box_coding=1,
+ iou_threshold=0.45,
+ max_output_boxes=100,
+ plugin_version="1",
+ score_activation=0,
+ score_threshold=0.25,
+ ):
+ batch_size, num_boxes, num_classes = scores.shape
+ num_det = torch.randint(0, max_output_boxes, (batch_size, 1), dtype=torch.int32)
+ det_boxes = torch.randn(batch_size, max_output_boxes, 4)
+ det_scores = torch.randn(batch_size, max_output_boxes)
+ det_classes = torch.randint(0, num_classes, (batch_size, max_output_boxes), dtype=torch.int32)
+ return num_det, det_boxes, det_scores, det_classes
+
+ @staticmethod
+ def symbolic(g,
+ boxes,
+ scores,
+ background_class=-1,
+ box_coding=1,
+ iou_threshold=0.45,
+ max_output_boxes=100,
+ plugin_version="1",
+ score_activation=0,
+ score_threshold=0.25):
+ out = g.op("TRT::EfficientNMS_TRT",
+ boxes,
+ scores,
+ background_class_i=background_class,
+ box_coding_i=box_coding,
+ iou_threshold_f=iou_threshold,
+ max_output_boxes_i=max_output_boxes,
+ plugin_version_s=plugin_version,
+ score_activation_i=score_activation,
+ score_threshold_f=score_threshold,
+ outputs=4)
+ nums, boxes, scores, classes = out
+ return nums, boxes, scores, classes
+
+
+class ONNX_ORT(nn.Module):
+ '''onnx module with ONNX-Runtime NMS operation.'''
+ def __init__(self, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=640, device=None, n_classes=80):
+ super().__init__()
+ self.device = device if device else torch.device("cpu")
+ self.max_obj = torch.tensor([max_obj]).to(device)
+ self.iou_threshold = torch.tensor([iou_thres]).to(device)
+ self.score_threshold = torch.tensor([score_thres]).to(device)
+ self.max_wh = max_wh # if max_wh != 0 : non-agnostic else : agnostic
+ self.convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=self.device)
+ self.n_classes=n_classes
+
+ def forward(self, x):
+ boxes = x[:, :, :4]
+ conf = x[:, :, 4:5]
+ scores = x[:, :, 5:]
+ if self.n_classes == 1:
+ scores = conf # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ scores *= conf # conf = obj_conf * cls_conf
+ boxes @= self.convert_matrix
+ max_score, category_id = scores.max(2, keepdim=True)
+ dis = category_id.float() * self.max_wh
+ nmsbox = boxes + dis
+ max_score_tp = max_score.transpose(1, 2).contiguous()
+ selected_indices = ORT_NMS.apply(nmsbox, max_score_tp, self.max_obj, self.iou_threshold, self.score_threshold)
+ X, Y = selected_indices[:, 0], selected_indices[:, 2]
+ selected_boxes = boxes[X, Y, :]
+ selected_categories = category_id[X, Y, :].float()
+ selected_scores = max_score[X, Y, :]
+ X = X.unsqueeze(1).float()
+ return torch.cat([X, selected_boxes, selected_categories, selected_scores], 1)
+
+class ONNX_TRT(nn.Module):
+ '''onnx module with TensorRT NMS operation.'''
+ def __init__(self, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=None ,device=None, n_classes=80):
+ super().__init__()
+ assert max_wh is None
+ self.device = device if device else torch.device('cpu')
+ self.background_class = -1,
+ self.box_coding = 1,
+ self.iou_threshold = iou_thres
+ self.max_obj = max_obj
+ self.plugin_version = '1'
+ self.score_activation = 0
+ self.score_threshold = score_thres
+ self.n_classes=n_classes
+
+ def forward(self, x):
+ boxes = x[:, :, :4]
+ conf = x[:, :, 4:5]
+ scores = x[:, :, 5:]
+ if self.n_classes == 1:
+ scores = conf # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ scores *= conf # conf = obj_conf * cls_conf
+ num_det, det_boxes, det_scores, det_classes = TRT_NMS.apply(boxes, scores, self.background_class, self.box_coding,
+ self.iou_threshold, self.max_obj,
+ self.plugin_version, self.score_activation,
+ self.score_threshold)
+ return num_det, det_boxes, det_scores, det_classes
+
+
+class End2End(nn.Module):
+ '''export onnx or tensorrt model with NMS operation.'''
+ def __init__(self, model, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=None, device=None, n_classes=80):
+ super().__init__()
+ device = device if device else torch.device('cpu')
+ assert isinstance(max_wh,(int)) or max_wh is None
+ self.model = model.to(device)
+ self.model.model[-1].end2end = True
+ self.patch_model = ONNX_TRT if max_wh is None else ONNX_ORT
+ self.end2end = self.patch_model(max_obj, iou_thres, score_thres, max_wh, device, n_classes)
+ self.end2end.eval()
+
+ def forward(self, x):
+ x = self.model(x)
+ x = self.end2end(x)
+ return x
+
+
+
+
+
+def attempt_load(weights, map_location=None):
+ # Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a
+ model = Ensemble()
+ for w in weights if isinstance(weights, list) else [weights]:
+ attempt_download(w)
+ ckpt = torch.load(w, map_location=map_location) # load
+ model.append(ckpt['ema' if ckpt.get('ema') else 'model'].float().fuse().eval()) # FP32 model
+
+ # Compatibility updates
+ for m in model.modules():
+ if type(m) in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
+ m.inplace = True # pytorch 1.7.0 compatibility
+ elif type(m) is nn.Upsample:
+ m.recompute_scale_factor = None # torch 1.11.0 compatibility
+ elif type(m) is Conv:
+ m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatibility
+
+ if len(model) == 1:
+ return model[-1] # return model
+ else:
+ print('Ensemble created with %s\n' % weights)
+ for k in ['names', 'stride']:
+ setattr(model, k, getattr(model[-1], k))
+ return model # return ensemble
+
+
diff --git a/oneAPI_ODAV_APP/models/yolo.py b/oneAPI_ODAV_APP/models/yolo.py
new file mode 100644
index 000000000..222a962e2
--- /dev/null
+++ b/oneAPI_ODAV_APP/models/yolo.py
@@ -0,0 +1,844 @@
+import argparse
+import logging
+import sys
+from copy import deepcopy
+
+
+sys.path.append('./') # to run '$ python *.py' files in subdirectories
+logger = logging.getLogger(__name__)
+import torch
+from models.common import *
+from models.experimental import *
+from utils.autoanchor import check_anchor_order
+from utils.general import make_divisible, check_file, set_logging
+from utils.torch_utils import time_synchronized, fuse_conv_and_bn, model_info, scale_img, initialize_weights, \
+ select_device, copy_attr
+from utils.loss import SigmoidBin
+
+try:
+ import thop # for FLOPS computation
+except ImportError:
+ thop = None
+
+
+class Detect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(Detect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IDetect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(IDetect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ def fuseforward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ def fuse(self):
+ print("IDetect.fuse")
+ # fuse ImplicitA and Convolution
+ for i in range(len(self.m)):
+ c1,c2,_,_ = self.m[i].weight.shape
+ c1_,c2_, _,_ = self.ia[i].implicit.shape
+ self.m[i].bias += torch.matmul(self.m[i].weight.reshape(c1,c2),self.ia[i].implicit.reshape(c2_,c1_)).squeeze(1)
+
+ # fuse ImplicitM and Convolution
+ for i in range(len(self.m)):
+ c1,c2, _,_ = self.im[i].implicit.shape
+ self.m[i].bias *= self.im[i].implicit.reshape(c2)
+ self.m[i].weight *= self.im[i].implicit.transpose(0,1)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IKeypoint(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, nc=80, anchors=(), nkpt=17, ch=(), inplace=True, dw_conv_kpt=False): # detection layer
+ super(IKeypoint, self).__init__()
+ self.nc = nc # number of classes
+ self.nkpt = nkpt
+ self.dw_conv_kpt = dw_conv_kpt
+ self.no_det=(nc + 5) # number of outputs per anchor for box and class
+ self.no_kpt = 3*self.nkpt ## number of outputs per anchor for keypoints
+ self.no = self.no_det+self.no_kpt
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ self.flip_test = False
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no_det * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no_det * self.na) for _ in ch)
+
+ if self.nkpt is not None:
+ if self.dw_conv_kpt: #keypoint head is slightly more complex
+ self.m_kpt = nn.ModuleList(
+ nn.Sequential(DWConv(x, x, k=3), Conv(x,x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), Conv(x,x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), nn.Conv2d(x, self.no_kpt * self.na, 1)) for x in ch)
+ else: #keypoint head is a single convolution
+ self.m_kpt = nn.ModuleList(nn.Conv2d(x, self.no_kpt * self.na, 1) for x in ch)
+
+ self.inplace = inplace # use in-place ops (e.g. slice assignment)
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ if self.nkpt is None or self.nkpt==0:
+ x[i] = self.im[i](self.m[i](self.ia[i](x[i]))) # conv
+ else :
+ x[i] = torch.cat((self.im[i](self.m[i](self.ia[i](x[i]))), self.m_kpt[i](x[i])), axis=1)
+
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+ x_det = x[i][..., :6]
+ x_kpt = x[i][..., 6:]
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+ kpt_grid_x = self.grid[i][..., 0:1]
+ kpt_grid_y = self.grid[i][..., 1:2]
+
+ if self.nkpt == 0:
+ y = x[i].sigmoid()
+ else:
+ y = x_det.sigmoid()
+
+ if self.inplace:
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i].view(1, self.na, 1, 1, 2) # wh
+ if self.nkpt != 0:
+ x_kpt[..., 0::3] = (x_kpt[..., ::3] * 2. - 0.5 + kpt_grid_x.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ x_kpt[..., 1::3] = (x_kpt[..., 1::3] * 2. - 0.5 + kpt_grid_y.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #x_kpt[..., 0::3] = (x_kpt[..., ::3] + kpt_grid_x.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = (x_kpt[..., 1::3] + kpt_grid_y.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #print('=============')
+ #print(self.anchor_grid[i].shape)
+ #print(self.anchor_grid[i][...,0].unsqueeze(4).shape)
+ #print(x_kpt[..., 0::3].shape)
+ #x_kpt[..., 0::3] = ((x_kpt[..., 0::3].tanh() * 2.) ** 3 * self.anchor_grid[i][...,0].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_x.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = ((x_kpt[..., 1::3].tanh() * 2.) ** 3 * self.anchor_grid[i][...,1].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_y.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 0::3] = (((x_kpt[..., 0::3].sigmoid() * 4.) ** 2 - 8.) * self.anchor_grid[i][...,0].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_x.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = (((x_kpt[..., 1::3].sigmoid() * 4.) ** 2 - 8.) * self.anchor_grid[i][...,1].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_y.repeat(1,1,1,1,17) * self.stride[i] # xy
+ x_kpt[..., 2::3] = x_kpt[..., 2::3].sigmoid()
+
+ y = torch.cat((xy, wh, y[..., 4:], x_kpt), dim = -1)
+
+ else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ if self.nkpt != 0:
+ y[..., 6:] = (y[..., 6:] * 2. - 0.5 + self.grid[i].repeat((1,1,1,1,self.nkpt))) * self.stride[i] # xy
+ y = torch.cat((xy, wh, y[..., 4:]), -1)
+
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+
+class IAuxDetect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(IAuxDetect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[:self.nl]) # output conv
+ self.m2 = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[self.nl:]) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch[:self.nl])
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch[:self.nl])
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ x[i+self.nl] = self.m2[i](x[i+self.nl])
+ x[i+self.nl] = x[i+self.nl].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x[:self.nl])
+
+ def fuseforward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i].data # wh
+ y = torch.cat((xy, wh, y[..., 4:]), -1)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ def fuse(self):
+ print("IAuxDetect.fuse")
+ # fuse ImplicitA and Convolution
+ for i in range(len(self.m)):
+ c1,c2,_,_ = self.m[i].weight.shape
+ c1_,c2_, _,_ = self.ia[i].implicit.shape
+ self.m[i].bias += torch.matmul(self.m[i].weight.reshape(c1,c2),self.ia[i].implicit.reshape(c2_,c1_)).squeeze(1)
+
+ # fuse ImplicitM and Convolution
+ for i in range(len(self.m)):
+ c1,c2, _,_ = self.im[i].implicit.shape
+ self.m[i].bias *= self.im[i].implicit.reshape(c2)
+ self.m[i].weight *= self.im[i].implicit.transpose(0,1)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IBin(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, nc=80, anchors=(), ch=(), bin_count=21): # detection layer
+ super(IBin, self).__init__()
+ self.nc = nc # number of classes
+ self.bin_count = bin_count
+
+ self.w_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0)
+ self.h_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0)
+ # classes, x,y,obj
+ self.no = nc + 3 + \
+ self.w_bin_sigmoid.get_length() + self.h_bin_sigmoid.get_length() # w-bce, h-bce
+ # + self.x_bin_sigmoid.get_length() + self.y_bin_sigmoid.get_length()
+
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
+
+ def forward(self, x):
+
+ #self.x_bin_sigmoid.use_fw_regression = True
+ #self.y_bin_sigmoid.use_fw_regression = True
+ self.w_bin_sigmoid.use_fw_regression = True
+ self.h_bin_sigmoid.use_fw_regression = True
+
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ #y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+
+
+ #px = (self.x_bin_sigmoid.forward(y[..., 0:12]) + self.grid[i][..., 0]) * self.stride[i]
+ #py = (self.y_bin_sigmoid.forward(y[..., 12:24]) + self.grid[i][..., 1]) * self.stride[i]
+
+ pw = self.w_bin_sigmoid.forward(y[..., 2:24]) * self.anchor_grid[i][..., 0]
+ ph = self.h_bin_sigmoid.forward(y[..., 24:46]) * self.anchor_grid[i][..., 1]
+
+ #y[..., 0] = px
+ #y[..., 1] = py
+ y[..., 2] = pw
+ y[..., 3] = ph
+
+ y = torch.cat((y[..., 0:4], y[..., 46:]), dim=-1)
+
+ z.append(y.view(bs, -1, y.shape[-1]))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+
+class Model(nn.Module):
+ def __init__(self, cfg='yolor-csp-c.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classes
+ super(Model, self).__init__()
+ self.traced = False
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg) as f:
+ self.yaml = yaml.load(f, Loader=yaml.SafeLoader) # model dict
+
+ # Define model
+ ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels
+ if nc and nc != self.yaml['nc']:
+ logger.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ if anchors:
+ logger.info(f'Overriding model.yaml anchors with anchors={anchors}')
+ self.yaml['anchors'] = round(anchors) # override yaml value
+ self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist
+ self.names = [str(i) for i in range(self.yaml['nc'])] # default names
+ # print([x.shape for x in self.forward(torch.zeros(1, ch, 64, 64))])
+
+ # Build strides, anchors
+ m = self.model[-1] # Detect()
+ if isinstance(m, Detect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IDetect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IAuxDetect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))[:4]]) # forward
+ #print(m.stride)
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_aux_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IBin):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases_bin() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IKeypoint):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases_kpt() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+
+ # Init weights, biases
+ initialize_weights(self)
+ self.info()
+ logger.info('')
+
+ def forward(self, x, augment=False, profile=False):
+ if augment:
+ img_size = x.shape[-2:] # height, width
+ s = [1, 0.83, 0.67] # scales
+ f = [None, 3, None] # flips (2-ud, 3-lr)
+ y = [] # outputs
+ for si, fi in zip(s, f):
+ xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
+ yi = self.forward_once(xi)[0] # forward
+ # cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # save
+ yi[..., :4] /= si # de-scale
+ if fi == 2:
+ yi[..., 1] = img_size[0] - yi[..., 1] # de-flip ud
+ elif fi == 3:
+ yi[..., 0] = img_size[1] - yi[..., 0] # de-flip lr
+ y.append(yi)
+ return torch.cat(y, 1), None # augmented inference, train
+ else:
+ return self.forward_once(x, profile) # single-scale inference, train
+
+ def forward_once(self, x, profile=False):
+ y, dt = [], [] # outputs
+ for m in self.model:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+
+ if not hasattr(self, 'traced'):
+ self.traced=False
+
+ if self.traced:
+ if isinstance(m, Detect) or isinstance(m, IDetect) or isinstance(m, IAuxDetect) or isinstance(m, IKeypoint):
+ break
+
+ if profile:
+ c = isinstance(m, (Detect, IDetect, IAuxDetect, IBin))
+ o = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPS
+ for _ in range(10):
+ m(x.copy() if c else x)
+ t = time_synchronized()
+ for _ in range(10):
+ m(x.copy() if c else x)
+ dt.append((time_synchronized() - t) * 100)
+ print('%10.1f%10.0f%10.1fms %-40s' % (o, m.np, dt[-1], m.type))
+
+ x = m(x) # run
+
+ y.append(x if m.i in self.save else None) # save output
+
+ if profile:
+ print('%.1fms total' % sum(dt))
+ return x
+
+ def _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _initialize_aux_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, mi2, s in zip(m.m, m.m2, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+ b2 = mi2.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b2.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b2.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi2.bias = torch.nn.Parameter(b2.view(-1), requires_grad=True)
+
+ def _initialize_biases_bin(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Bin() module
+ bc = m.bin_count
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ old = b[:, (0,1,2,bc+3)].data
+ obj_idx = 2*bc+4
+ b[:, :obj_idx].data += math.log(0.6 / (bc + 1 - 0.99))
+ b[:, obj_idx].data += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b[:, (obj_idx+1):].data += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ b[:, (0,1,2,bc+3)].data = old
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _initialize_biases_kpt(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _print_biases(self):
+ m = self.model[-1] # Detect() module
+ for mi in m.m: # from
+ b = mi.bias.detach().view(m.na, -1).T # conv.bias(255) to (3,85)
+ print(('%6g Conv2d.bias:' + '%10.3g' * 6) % (mi.weight.shape[1], *b[:5].mean(1).tolist(), b[5:].mean()))
+
+ # def _print_weights(self):
+ # for m in self.model.modules():
+ # if type(m) is Bottleneck:
+ # print('%10.3g' % (m.w.detach().sigmoid() * 2)) # shortcut weights
+
+ def fuse(self): # fuse model Conv2d() + BatchNorm2d() layers
+ print('Fusing layers... ')
+ for m in self.model.modules():
+ if isinstance(m, RepConv):
+ #print(f" fuse_repvgg_block")
+ m.fuse_repvgg_block()
+ elif isinstance(m, RepConv_OREPA):
+ #print(f" switch_to_deploy")
+ m.switch_to_deploy()
+ elif type(m) is Conv and hasattr(m, 'bn'):
+ m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
+ delattr(m, 'bn') # remove batchnorm
+ m.forward = m.fuseforward # update forward
+ elif isinstance(m, (IDetect, IAuxDetect)):
+ m.fuse()
+ m.forward = m.fuseforward
+ self.info()
+ return self
+
+ def nms(self, mode=True): # add or remove NMS module
+ present = type(self.model[-1]) is NMS # last layer is NMS
+ if mode and not present:
+ print('Adding NMS... ')
+ m = NMS() # module
+ m.f = -1 # from
+ m.i = self.model[-1].i + 1 # index
+ self.model.add_module(name='%s' % m.i, module=m) # add
+ self.eval()
+ elif not mode and present:
+ print('Removing NMS... ')
+ self.model = self.model[:-1] # remove
+ return self
+
+ def autoshape(self): # add autoShape module
+ print('Adding autoShape... ')
+ m = autoShape(self) # wrap model
+ copy_attr(m, self, include=('yaml', 'nc', 'hyp', 'names', 'stride'), exclude=()) # copy attributes
+ return m
+
+ def info(self, verbose=False, img_size=640): # print model information
+ model_info(self, verbose, img_size)
+
+
+def parse_model(d, ch): # model_dict, input_channels(3)
+ logger.info('\n%3s%18s%3s%10s %-40s%-30s' % ('', 'from', 'n', 'params', 'module', 'arguments'))
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ try:
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+ except:
+ pass
+
+ n = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in [nn.Conv2d, Conv, RobustConv, RobustConv2, DWConv, GhostConv, RepConv, RepConv_OREPA, DownC,
+ SPP, SPPF, SPPCSPC, GhostSPPCSPC, MixConv2d, Focus, Stem, GhostStem, CrossConv,
+ Bottleneck, BottleneckCSPA, BottleneckCSPB, BottleneckCSPC,
+ RepBottleneck, RepBottleneckCSPA, RepBottleneckCSPB, RepBottleneckCSPC,
+ Res, ResCSPA, ResCSPB, ResCSPC,
+ RepRes, RepResCSPA, RepResCSPB, RepResCSPC,
+ ResX, ResXCSPA, ResXCSPB, ResXCSPC,
+ RepResX, RepResXCSPA, RepResXCSPB, RepResXCSPC,
+ Ghost, GhostCSPA, GhostCSPB, GhostCSPC,
+ SwinTransformerBlock, STCSPA, STCSPB, STCSPC,
+ SwinTransformer2Block, ST2CSPA, ST2CSPB, ST2CSPC]:
+ c1, c2 = ch[f], args[0]
+ if c2 != no: # if not output
+ c2 = make_divisible(c2 * gw, 8)
+
+ args = [c1, c2, *args[1:]]
+ if m in [DownC, SPPCSPC, GhostSPPCSPC,
+ BottleneckCSPA, BottleneckCSPB, BottleneckCSPC,
+ RepBottleneckCSPA, RepBottleneckCSPB, RepBottleneckCSPC,
+ ResCSPA, ResCSPB, ResCSPC,
+ RepResCSPA, RepResCSPB, RepResCSPC,
+ ResXCSPA, ResXCSPB, ResXCSPC,
+ RepResXCSPA, RepResXCSPB, RepResXCSPC,
+ GhostCSPA, GhostCSPB, GhostCSPC,
+ STCSPA, STCSPB, STCSPC,
+ ST2CSPA, ST2CSPB, ST2CSPC]:
+ args.insert(2, n) # number of repeats
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum([ch[x] for x in f])
+ elif m is Chuncat:
+ c2 = sum([ch[x] for x in f])
+ elif m is Shortcut:
+ c2 = ch[f[0]]
+ elif m is Foldcut:
+ c2 = ch[f] // 2
+ elif m in [Detect, IDetect, IAuxDetect, IBin, IKeypoint]:
+ args.append([ch[x] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ elif m is ReOrg:
+ c2 = ch[f] * 4
+ elif m is Contract:
+ c2 = ch[f] * args[0] ** 2
+ elif m is Expand:
+ c2 = ch[f] // args[0] ** 2
+ else:
+ c2 = ch[f]
+
+ m_ = nn.Sequential(*[m(*args) for _ in range(n)]) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum([x.numel() for x in m_.parameters()]) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ logger.info('%3s%18s%3s%10.0f %-40s%-30s' % (i, f, n, np, t, args)) # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ if i == 0:
+ ch = []
+ ch.append(c2)
+ return nn.Sequential(*layers), sorted(save)
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--cfg', type=str, default='yolor-csp-c.yaml', help='model.yaml')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--profile', action='store_true', help='profile model speed')
+ opt = parser.parse_args()
+ opt.cfg = check_file(opt.cfg) # check file
+ set_logging()
+ device = select_device(opt.device)
+
+ # Create model
+ model = Model(opt.cfg).to(device)
+ model.train()
+
+ if opt.profile:
+ img = torch.rand(1, 3, 640, 640).to(device)
+ y = model(img, profile=True)
+
+ # Profile
+ # img = torch.rand(8 if torch.cuda.is_available() else 1, 3, 640, 640).to(device)
+ # y = model(img, profile=True)
+
+ # Tensorboard
+ # from torch.utils.tensorboard import SummaryWriter
+ # tb_writer = SummaryWriter()
+ # print("Run 'tensorboard --logdir=models/runs' to view tensorboard at http://localhost:6006/")
+ # tb_writer.add_graph(model.model, img) # add model to tensorboard
+ # tb_writer.add_image('test', img[0], dataformats='CWH') # add model to tensorboard
diff --git a/oneAPI_ODAV_APP/requirements.txt b/oneAPI_ODAV_APP/requirements.txt
new file mode 100644
index 000000000..b8a8c3dc8
--- /dev/null
+++ b/oneAPI_ODAV_APP/requirements.txt
@@ -0,0 +1,47 @@
+EasyTkinter==1.1.0
+Pillow==9.4.0
+opencv-python==4.7.0.68
+pybboxes==0.1.6
+geocoder==1.38.1
+# detectron2
+
+# Usage: pip install -r requirements.txt
+
+# Base ----------------------------------------
+matplotlib>=3.2.2
+numpy>=1.18.5
+PyYAML>=5.3.1
+requests>=2.23.0
+scipy>=1.4.1
+tqdm>=4.41.0
+protobuf<4.21.3
+
+# Logging -------------------------------------
+tensorboard>=2.4.1
+# wandb
+
+# Plotting ------------------------------------
+pandas>=1.1.4
+seaborn>=0.11.0
+
+# Export --------------------------------------
+# coremltools>=4.1 # CoreML export
+# onnx>=1.9.0 # ONNX export
+# onnx-simplifier>=0.3.6 # ONNX simplifier
+# scikit-learn==0.19.2 # CoreML quantization
+# tensorflow>=2.4.1 # TFLite export
+# tensorflowjs>=3.9.0 # TF.js export
+# openvino-dev # OpenVINO export
+
+# Extras --------------------------------------
+ipython # interactive notebook
+psutil # system utilization
+thop # FLOPs computation
+# albumentations>=1.0.3
+# pycocotools>=2.0 # COCO mAP
+# roboflow
+
+
+requests==2.25.0
+configparser==5.0.1
+PyAutoGUI==0.9.52
diff --git a/oneAPI_ODAV_APP/requirements_gpu.txt b/oneAPI_ODAV_APP/requirements_gpu.txt
new file mode 100644
index 000000000..4e565bbfa
--- /dev/null
+++ b/oneAPI_ODAV_APP/requirements_gpu.txt
@@ -0,0 +1,6 @@
+# For Torch GPU
+
+-i https://download.pytorch.org/whl/cu113
+
+torch==1.11.0+cu113
+torchvision==0.12.0+cu113
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/utils/__init__.py b/oneAPI_ODAV_APP/utils/__init__.py
new file mode 100644
index 000000000..a6131c10e
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/__init__.py
@@ -0,0 +1 @@
+# init
diff --git a/oneAPI_ODAV_APP/utils/activations.py b/oneAPI_ODAV_APP/utils/activations.py
new file mode 100644
index 000000000..5ad1735d7
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/activations.py
@@ -0,0 +1,73 @@
+# Activation functions
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+
+# SiLU https://arxiv.org/pdf/1606.08415.pdf ----------------------------------------------------------------------------
+class SiLU(nn.Module): # export-friendly version of nn.SiLU()
+ @staticmethod
+ def forward(x):
+ return x * torch.sigmoid(x)
+
+
+
+class Hardswish(nn.Module): # export-friendly version of nn.Hardswish()
+ @staticmethod
+ def forward(x):
+ # return x * F.hardsigmoid(x) # for torchscript and CoreML
+ return x * F.hardtanh(x + 3, 0., 6.) / 6. # for torchscript, CoreML and ONNX
+
+
+class MemoryEfficientSwish(nn.Module):
+ class F(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x * torch.sigmoid(x)
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ return grad_output * (sx * (1 + x * (1 - sx)))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+# Mish https://github.com/digantamisra98/Mish --------------------------------------------------------------------------
+class Mish(nn.Module):
+ @staticmethod
+ def forward(x):
+ return x * F.softplus(x).tanh()
+
+
+class MemoryEfficientMish(nn.Module):
+ class F(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ fx = F.softplus(x).tanh()
+ return grad_output * (fx + x * sx * (1 - fx * fx))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+# FReLU https://arxiv.org/abs/2007.11824 -------------------------------------------------------------------------------
+class FReLU(nn.Module):
+ def __init__(self, c1, k=3): # ch_in, kernel
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
+ self.bn = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ return torch.max(x, self.bn(self.conv(x)))
diff --git a/oneAPI_ODAV_APP/utils/add_nms.py b/oneAPI_ODAV_APP/utils/add_nms.py
new file mode 100644
index 000000000..30318d94e
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/add_nms.py
@@ -0,0 +1,156 @@
+import numpy as np
+import onnx
+from onnx import shape_inference
+try:
+ import onnx_graphsurgeon as gs
+except Exception as e:
+ print('Import onnx_graphsurgeon failure: %s' % e)
+
+import logging
+
+
+LOGGER = logging.getLogger(__name__)
+
+class RegisterNMS(object):
+ def __init__(
+ self,
+ onnx_model_path: str,
+ precision: str = "fp32",
+ ):
+
+ self.graph = gs.import_onnx(onnx.load(onnx_model_path))
+ assert self.graph
+ LOGGER.info("ONNX graph created successfully")
+ # Fold constants via ONNX-GS that PyTorch2ONNX may have missed
+ self.graph.fold_constants()
+ self.precision = precision
+ self.batch_size = 1
+ def infer(self):
+ """
+ Sanitize the graph by cleaning any unconnected nodes, do a topological resort,
+ and fold constant inputs values. When possible, run shape inference on the
+ ONNX graph to determine tensor shapes.
+ """
+ for _ in range(3):
+ count_before = len(self.graph.nodes)
+
+ self.graph.cleanup().toposort()
+ try:
+ for node in self.graph.nodes:
+ for o in node.outputs:
+ o.shape = None
+ model = gs.export_onnx(self.graph)
+ model = shape_inference.infer_shapes(model)
+ self.graph = gs.import_onnx(model)
+ except Exception as e:
+ LOGGER.info(f"Shape inference could not be performed at this time:\n{e}")
+ try:
+ self.graph.fold_constants(fold_shapes=True)
+ except TypeError as e:
+ LOGGER.error(
+ "This version of ONNX GraphSurgeon does not support folding shapes, "
+ f"please upgrade your onnx_graphsurgeon module. Error:\n{e}"
+ )
+ raise
+
+ count_after = len(self.graph.nodes)
+ if count_before == count_after:
+ # No new folding occurred in this iteration, so we can stop for now.
+ break
+
+ def save(self, output_path):
+ """
+ Save the ONNX model to the given location.
+ Args:
+ output_path: Path pointing to the location where to write
+ out the updated ONNX model.
+ """
+ self.graph.cleanup().toposort()
+ model = gs.export_onnx(self.graph)
+ onnx.save(model, output_path)
+ LOGGER.info(f"Saved ONNX model to {output_path}")
+
+ def register_nms(
+ self,
+ *,
+ score_thresh: float = 0.25,
+ nms_thresh: float = 0.45,
+ detections_per_img: int = 100,
+ ):
+ """
+ Register the ``EfficientNMS_TRT`` plugin node.
+ NMS expects these shapes for its input tensors:
+ - box_net: [batch_size, number_boxes, 4]
+ - class_net: [batch_size, number_boxes, number_labels]
+ Args:
+ score_thresh (float): The scalar threshold for score (low scoring boxes are removed).
+ nms_thresh (float): The scalar threshold for IOU (new boxes that have high IOU
+ overlap with previously selected boxes are removed).
+ detections_per_img (int): Number of best detections to keep after NMS.
+ """
+
+ self.infer()
+ # Find the concat node at the end of the network
+ op_inputs = self.graph.outputs
+ op = "EfficientNMS_TRT"
+ attrs = {
+ "plugin_version": "1",
+ "background_class": -1, # no background class
+ "max_output_boxes": detections_per_img,
+ "score_threshold": score_thresh,
+ "iou_threshold": nms_thresh,
+ "score_activation": False,
+ "box_coding": 0,
+ }
+
+ if self.precision == "fp32":
+ dtype_output = np.float32
+ elif self.precision == "fp16":
+ dtype_output = np.float16
+ else:
+ raise NotImplementedError(f"Currently not supports precision: {self.precision}")
+
+ # NMS Outputs
+ output_num_detections = gs.Variable(
+ name="num_dets",
+ dtype=np.int32,
+ shape=[self.batch_size, 1],
+ ) # A scalar indicating the number of valid detections per batch image.
+ output_boxes = gs.Variable(
+ name="det_boxes",
+ dtype=dtype_output,
+ shape=[self.batch_size, detections_per_img, 4],
+ )
+ output_scores = gs.Variable(
+ name="det_scores",
+ dtype=dtype_output,
+ shape=[self.batch_size, detections_per_img],
+ )
+ output_labels = gs.Variable(
+ name="det_classes",
+ dtype=np.int32,
+ shape=[self.batch_size, detections_per_img],
+ )
+
+ op_outputs = [output_num_detections, output_boxes, output_scores, output_labels]
+
+ # Create the NMS Plugin node with the selected inputs. The outputs of the node will also
+ # become the final outputs of the graph.
+ self.graph.layer(op=op, name="batched_nms", inputs=op_inputs, outputs=op_outputs, attrs=attrs)
+ LOGGER.info(f"Created NMS plugin '{op}' with attributes: {attrs}")
+
+ self.graph.outputs = op_outputs
+
+ self.infer()
+
+ def save(self, output_path):
+ """
+ Save the ONNX model to the given location.
+ Args:
+ output_path: Path pointing to the location where to write
+ out the updated ONNX model.
+ """
+ self.graph.cleanup().toposort()
+ model = gs.export_onnx(self.graph)
+ onnx.save(model, output_path)
+ LOGGER.info(f"Saved ONNX model to {output_path}")
diff --git a/oneAPI_ODAV_APP/utils/autoanchor.py b/oneAPI_ODAV_APP/utils/autoanchor.py
new file mode 100644
index 000000000..2f4bb24ac
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/autoanchor.py
@@ -0,0 +1,161 @@
+# Auto-anchor utils
+
+import numpy as np
+import torch
+import yaml
+from scipy.cluster.vq import kmeans
+from tqdm import tqdm
+
+from utils.general import colorstr
+
+
+
+def check_anchor_order(m):
+ # Check anchor order against stride order for YOLO Detect() module m, and correct if necessary
+ a = m.anchor_grid.prod(-1).view(-1) # anchor area
+ da = a[-1] - a[0] # delta a
+ ds = m.stride[-1] - m.stride[0] # delta s
+ if da.sign() != ds.sign(): # same order
+ print('Reversing anchor order')
+ m.anchors[:] = m.anchors.flip(0)
+ m.anchor_grid[:] = m.anchor_grid.flip(0)
+
+
+def check_anchors(dataset, model, thr=4.0, imgsz=640):
+ # Check anchor fit to data, recompute if necessary
+ prefix = colorstr('autoanchor: ')
+ print(f'\n{prefix}Analyzing anchors... ', end='')
+ m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
+ shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
+ wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
+
+ def metric(k): # compute metric
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1. / r).min(2)[0] # ratio metric
+ best = x.max(1)[0] # best_x
+ aat = (x > 1. / thr).float().sum(1).mean() # anchors above threshold
+ bpr = (best > 1. / thr).float().mean() # best possible recall
+ return bpr, aat
+
+ anchors = m.anchor_grid.clone().cpu().view(-1, 2) # current anchors
+ bpr, aat = metric(anchors)
+ print(f'anchors/target = {aat:.2f}, Best Possible Recall (BPR) = {bpr:.4f}', end='')
+ if bpr < 0.98: # threshold to recompute
+ print('. Attempting to improve anchors, please wait...')
+ na = m.anchor_grid.numel() // 2 # number of anchors
+ try:
+ anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
+ except Exception as e:
+ print(f'{prefix}ERROR: {e}')
+ new_bpr = metric(anchors)[0]
+ if new_bpr > bpr: # replace anchors
+ anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
+ m.anchor_grid[:] = anchors.clone().view_as(m.anchor_grid) # for inference
+ check_anchor_order(m)
+ m.anchors[:] = anchors.clone().view_as(m.anchors) / m.stride.to(m.anchors.device).view(-1, 1, 1) # loss
+ print(f'{prefix}New anchors saved to model. Update model *.yaml to use these anchors in the future.')
+ else:
+ print(f'{prefix}Original anchors better than new anchors. Proceeding with original anchors.')
+ print('') # newline
+
+
+def kmean_anchors(path='./data/coco.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
+ """ Creates kmeans-evolved anchors from training dataset
+
+ Arguments:
+ path: path to dataset *.yaml, or a loaded dataset
+ n: number of anchors
+ img_size: image size used for training
+ thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
+ gen: generations to evolve anchors using genetic algorithm
+ verbose: print all results
+
+ Return:
+ k: kmeans evolved anchors
+
+ Usage:
+ from utils.autoanchor import *; _ = kmean_anchors()
+ """
+ thr = 1. / thr
+ prefix = colorstr('autoanchor: ')
+
+ def metric(k, wh): # compute metrics
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1. / r).min(2)[0] # ratio metric
+ # x = wh_iou(wh, torch.tensor(k)) # iou metric
+ return x, x.max(1)[0] # x, best_x
+
+ def anchor_fitness(k): # mutation fitness
+ _, best = metric(torch.tensor(k, dtype=torch.float32), wh)
+ return (best * (best > thr).float()).mean() # fitness
+
+ def print_results(k):
+ k = k[np.argsort(k.prod(1))] # sort small to large
+ x, best = metric(k, wh0)
+ bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
+ print(f'{prefix}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr')
+ print(f'{prefix}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, '
+ f'past_thr={x[x > thr].mean():.3f}-mean: ', end='')
+ for i, x in enumerate(k):
+ print('%i,%i' % (round(x[0]), round(x[1])), end=', ' if i < len(k) - 1 else '\n') # use in *.cfg
+ return k
+
+ if isinstance(path, str): # *.yaml file
+ with open(path) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # model dict
+ from utils.datasets import LoadImagesAndLabels
+ dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
+ else:
+ dataset = path # dataset
+
+ # Get label wh
+ shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
+
+ # Filter
+ i = (wh0 < 3.0).any(1).sum()
+ if i:
+ print(f'{prefix}WARNING: Extremely small objects found. {i} of {len(wh0)} labels are < 3 pixels in size.')
+ wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ # wh = wh * (np.random.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
+
+ # Kmeans calculation
+ print(f'{prefix}Running kmeans for {n} anchors on {len(wh)} points...')
+ s = wh.std(0) # sigmas for whitening
+ k, dist = kmeans(wh / s, n, iter=30) # points, mean distance
+ assert len(k) == n, print(f'{prefix}ERROR: scipy.cluster.vq.kmeans requested {n} points but returned only {len(k)}')
+ k *= s
+ wh = torch.tensor(wh, dtype=torch.float32) # filtered
+ wh0 = torch.tensor(wh0, dtype=torch.float32) # unfiltered
+ k = print_results(k)
+
+ # Plot
+ # k, d = [None] * 20, [None] * 20
+ # for i in tqdm(range(1, 21)):
+ # k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
+ # ax = ax.ravel()
+ # ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
+ # ax[0].hist(wh[wh[:, 0]<100, 0],400)
+ # ax[1].hist(wh[wh[:, 1]<100, 1],400)
+ # fig.savefig('wh.png', dpi=200)
+
+ # Evolve
+ npr = np.random
+ f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
+ pbar = tqdm(range(gen), desc=f'{prefix}Evolving anchors with Genetic Algorithm:') # progress bar
+ for _ in pbar:
+ v = np.ones(sh)
+ while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
+ v = ((npr.random(sh) < mp) * npr.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
+ kg = (k.copy() * v).clip(min=2.0)
+ fg = anchor_fitness(kg)
+ if fg > f:
+ f, k = fg, kg.copy()
+ pbar.desc = f'{prefix}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
+ if verbose:
+ print_results(k)
+
+ return print_results(k)
diff --git a/oneAPI_ODAV_APP/utils/aws/__init__.py b/oneAPI_ODAV_APP/utils/aws/__init__.py
new file mode 100644
index 000000000..e2cbd5382
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/aws/__init__.py
@@ -0,0 +1 @@
+#init
diff --git a/oneAPI_ODAV_APP/utils/aws/mime.sh b/oneAPI_ODAV_APP/utils/aws/mime.sh
new file mode 100644
index 000000000..cd595644c
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/aws/mime.sh
@@ -0,0 +1,27 @@
+# AWS EC2 instance startup 'MIME' script https://aws.amazon.com/premiumsupport/knowledge-center/execute-user-data-ec2/
+# This script will run on every instance restart, not only on first start
+# --- DO NOT COPY ABOVE COMMENTS WHEN PASTING INTO USERDATA ---
+
+
+Content-Type: multipart/mixed; boundary="//"
+MIME-Version: 1.0
+
+--//
+Content-Type: text/cloud-config; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="cloud-config.txt"
+
+#cloud-config
+cloud_final_modules:
+- [scripts-user, always]
+
+--//
+Content-Type: text/x-shellscript; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="userdata.txt"
+
+#!/bin/bash
+# --- paste contents of userdata.sh here ---
+--//
diff --git a/oneAPI_ODAV_APP/utils/aws/resume.py b/oneAPI_ODAV_APP/utils/aws/resume.py
new file mode 100644
index 000000000..ce7dcde6f
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/aws/resume.py
@@ -0,0 +1,38 @@
+# Resume all interrupted trainings in yolor/ dir including DDP trainings
+# Usage: $ python utils/aws/resume.py
+
+import os
+import sys
+from pathlib import Path
+
+import torch
+import yaml
+
+
+sys.path.append('./') # to run '$ python *.py' files in subdirectories
+
+port = 0 # --master_port
+path = Path('').resolve()
+for last in path.rglob('*/**/last.pt'):
+ ckpt = torch.load(last)
+ if ckpt['optimizer'] is None:
+ continue
+
+ # Load opt.yaml
+ with open(last.parent.parent / 'opt.yaml') as f:
+ opt = yaml.load(f, Loader=yaml.SafeLoader)
+
+ # Get device count
+ d = opt['device'].split(',') # devices
+ nd = len(d) # number of devices
+ ddp = nd > 1 or (nd == 0 and torch.cuda.device_count() > 1) # distributed data parallel
+
+ if ddp: # multi-GPU
+ port += 1
+ cmd = f'python -m torch.distributed.launch --nproc_per_node {nd} --master_port {port} train.py --resume {last}'
+ else: # single-GPU
+ cmd = f'python train.py --resume {last}'
+
+ cmd += ' > /dev/null 2>&1 &' # redirect output to dev/null and run in daemon thread
+ print(cmd)
+ os.system(cmd)
diff --git a/oneAPI_ODAV_APP/utils/aws/userdata.sh b/oneAPI_ODAV_APP/utils/aws/userdata.sh
new file mode 100644
index 000000000..da731b9f5
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/aws/userdata.sh
@@ -0,0 +1,28 @@
+#!/bin/bash
+# AWS EC2 instance startup script https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/user-data.html
+# This script will run only once on first instance start (for a re-start script see mime.sh)
+# /home/ubuntu (ubuntu) or /home/ec2-user (amazon-linux) is working dir
+# Use >300 GB SSD
+
+
+cd home/ubuntu
+if [ ! -d yolor ]; then
+ echo "Running first-time script." # install dependencies, download COCO, pull Docker
+ git clone -b main https://github.com/WongKinYiu/yolov7 && sudo chmod -R 777 yolov7
+ cd yolov7
+ bash data/scripts/get_coco.sh && echo "Data done." &
+ sudo docker pull nvcr.io/nvidia/pytorch:21.08-py3 && echo "Docker done." &
+ python -m pip install --upgrade pip && pip install -r requirements.txt && python detect.py && echo "Requirements done." &
+ wait && echo "All tasks done." # finish background tasks
+else
+ echo "Running re-start script." # resume interrupted runs
+ i=0
+ list=$(sudo docker ps -qa) # container list i.e. $'one\ntwo\nthree\nfour'
+ while IFS= read -r id; do
+ ((i++))
+ echo "restarting container $i: $id"
+ sudo docker start $id
+ # sudo docker exec -it $id python train.py --resume # single-GPU
+ sudo docker exec -d $id python utils/aws/resume.py # multi-scenario
+ done <<<"$list"
+fi
diff --git a/oneAPI_ODAV_APP/utils/datasets.py b/oneAPI_ODAV_APP/utils/datasets.py
new file mode 100644
index 000000000..d471515ec
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/datasets.py
@@ -0,0 +1,1321 @@
+# Dataset utils and dataloaders
+
+import glob
+import logging
+import math
+import os
+import random
+import shutil
+import time
+from itertools import repeat
+from multiprocessing.pool import ThreadPool
+from pathlib import Path
+from threading import Thread
+
+import cv2
+import numpy as np
+import torch
+import torch.nn.functional as F
+from PIL import Image, ExifTags
+from torch.utils.data import Dataset
+from tqdm import tqdm
+
+import pickle
+from copy import deepcopy
+#from pycocotools import mask as maskUtils
+from torchvision.utils import save_image
+from torchvision.ops import roi_pool, roi_align, ps_roi_pool, ps_roi_align
+
+from utils.general import check_requirements, xyxy2xywh, xywh2xyxy, xywhn2xyxy, xyn2xy, segment2box, segments2boxes, \
+ resample_segments, clean_str
+from utils.torch_utils import torch_distributed_zero_first
+
+
+# Parameters
+help_url = 'https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
+img_formats = ['bmp', 'jpg', 'jpeg', 'png', 'tif', 'tiff', 'dng', 'webp', 'mpo'] # acceptable image suffixes
+vid_formats = ['mov', 'avi', 'mp4', 'mpg', 'mpeg', 'm4v', 'wmv', 'mkv'] # acceptable video suffixes
+logger = logging.getLogger(__name__)
+
+# Get orientation exif tag
+for orientation in ExifTags.TAGS.keys():
+ if ExifTags.TAGS[orientation] == 'Orientation':
+ break
+
+
+def get_hash(files):
+ # Returns a single hash value of a list of files
+ return sum(os.path.getsize(f) for f in files if os.path.isfile(f))
+
+
+def exif_size(img):
+ # Returns exif-corrected PIL size
+ s = img.size # (width, height)
+ try:
+ rotation = dict(img._getexif().items())[orientation]
+ if rotation == 6: # rotation 270
+ s = (s[1], s[0])
+ elif rotation == 8: # rotation 90
+ s = (s[1], s[0])
+ except:
+ pass
+
+ return s
+
+
+def create_dataloader(path, imgsz, batch_size, stride, opt, hyp=None, augment=False, cache=False, pad=0.0, rect=False,
+ rank=-1, world_size=1, workers=8, image_weights=False, quad=False, prefix=''):
+ # Make sure only the first process in DDP process the dataset first, and the following others can use the cache
+ with torch_distributed_zero_first(rank):
+ dataset = LoadImagesAndLabels(path, imgsz, batch_size,
+ augment=augment, # augment images
+ hyp=hyp, # augmentation hyperparameters
+ rect=rect, # rectangular training
+ cache_images=cache,
+ single_cls=opt.single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix)
+
+ batch_size = min(batch_size, len(dataset))
+ nw = min([os.cpu_count() // world_size, batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = torch.utils.data.distributed.DistributedSampler(dataset) if rank != -1 else None
+ loader = torch.utils.data.DataLoader if image_weights else InfiniteDataLoader
+ # Use torch.utils.data.DataLoader() if dataset.properties will update during training else InfiniteDataLoader()
+ dataloader = loader(dataset,
+ batch_size=batch_size,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn)
+ return dataloader, dataset
+
+
+class InfiniteDataLoader(torch.utils.data.dataloader.DataLoader):
+ """ Dataloader that reuses workers
+
+ Uses same syntax as vanilla DataLoader
+ """
+
+ def __init__(self, *args, **kwargs):
+ super().__init__(*args, **kwargs)
+ object.__setattr__(self, 'batch_sampler', _RepeatSampler(self.batch_sampler))
+ self.iterator = super().__iter__()
+
+ def __len__(self):
+ return len(self.batch_sampler.sampler)
+
+ def __iter__(self):
+ for i in range(len(self)):
+ yield next(self.iterator)
+
+
+class _RepeatSampler(object):
+ """ Sampler that repeats forever
+
+ Args:
+ sampler (Sampler)
+ """
+
+ def __init__(self, sampler):
+ self.sampler = sampler
+
+ def __iter__(self):
+ while True:
+ yield from iter(self.sampler)
+
+
+class LoadImages: # for inference
+ def __init__(self, path, img_size=640, stride=32):
+ p = str(Path(path).absolute()) # os-agnostic absolute path
+ if '*' in p:
+ files = sorted(glob.glob(p, recursive=True)) # glob
+ elif os.path.isdir(p):
+ files = sorted(glob.glob(os.path.join(p, '*.*'))) # dir
+ elif os.path.isfile(p):
+ files = [p] # files
+ else:
+ raise Exception(f'ERROR: {p} does not exist')
+
+ images = [x for x in files if x.split('.')[-1].lower() in img_formats]
+ videos = [x for x in files if x.split('.')[-1].lower() in vid_formats]
+ ni, nv = len(images), len(videos)
+
+ self.img_size = img_size
+ self.stride = stride
+ self.files = images + videos
+ self.nf = ni + nv # number of files
+ self.video_flag = [False] * ni + [True] * nv
+ self.mode = 'image'
+ if any(videos):
+ self.new_video(videos[0]) # new video
+ else:
+ self.cap = None
+ assert self.nf > 0, f'No images or videos found in {p}. ' \
+ f'Supported formats are:\nimages: {img_formats}\nvideos: {vid_formats}'
+
+ def __iter__(self):
+ self.count = 0
+ return self
+
+ def __next__(self):
+ if self.count == self.nf:
+ raise StopIteration
+ path = self.files[self.count]
+
+ if self.video_flag[self.count]:
+ # Read video
+ self.mode = 'video'
+ ret_val, img0 = self.cap.read()
+ if not ret_val:
+ self.count += 1
+ self.cap.release()
+ if self.count == self.nf: # last video
+ raise StopIteration
+ else:
+ path = self.files[self.count]
+ self.new_video(path)
+ ret_val, img0 = self.cap.read()
+
+ self.frame += 1
+ print(f'video {self.count + 1}/{self.nf} ({self.frame}/{self.nframes}) {path}: ', end='')
+
+ else:
+ # Read image
+ self.count += 1
+ img0 = cv2.imread(path) # BGR
+ assert img0 is not None, 'Image Not Found ' + path
+ #print(f'image {self.count}/{self.nf} {path}: ', end='')
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return path, img, img0, self.cap
+
+ def new_video(self, path):
+ self.frame = 0
+ self.cap = cv2.VideoCapture(path)
+ self.nframes = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
+
+ def __len__(self):
+ return self.nf # number of files
+
+
+class LoadWebcam: # for inference
+ def __init__(self, pipe='0', img_size=640, stride=32):
+ self.img_size = img_size
+ self.stride = stride
+
+ if pipe.isnumeric():
+ pipe = eval(pipe) # local camera
+ # pipe = 'rtsp://192.168.1.64/1' # IP camera
+ # pipe = 'rtsp://username:password@192.168.1.64/1' # IP camera with login
+ # pipe = 'http://wmccpinetop.axiscam.net/mjpg/video.mjpg' # IP golf camera
+
+ self.pipe = pipe
+ self.cap = cv2.VideoCapture(pipe) # video capture object
+ self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ self.cap.release()
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Read frame
+ if self.pipe == 0: # local camera
+ ret_val, img0 = self.cap.read()
+ img0 = cv2.flip(img0, 1) # flip left-right
+ else: # IP camera
+ n = 0
+ while True:
+ n += 1
+ self.cap.grab()
+ if n % 30 == 0: # skip frames
+ ret_val, img0 = self.cap.retrieve()
+ if ret_val:
+ break
+
+ # Print
+ assert ret_val, f'Camera Error {self.pipe}'
+ img_path = 'webcam.jpg'
+ print(f'webcam {self.count}: ', end='')
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return img_path, img, img0, None
+
+ def __len__(self):
+ return 0
+
+
+class LoadStreams: # multiple IP or RTSP cameras
+ def __init__(self, sources='streams.txt', img_size=640, stride=32):
+ self.mode = 'stream'
+ self.img_size = img_size
+ self.stride = stride
+
+ if os.path.isfile(sources):
+ with open(sources, 'r') as f:
+ sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
+ else:
+ sources = [sources]
+
+ n = len(sources)
+ self.imgs = [None] * n
+ self.sources = [clean_str(x) for x in sources] # clean source names for later
+ for i, s in enumerate(sources):
+ # Start the thread to read frames from the video stream
+ print(f'{i + 1}/{n}: {s}... ', end='')
+ url = eval(s) if s.isnumeric() else s
+ if 'youtube.com/' in str(url) or 'youtu.be/' in str(url): # if source is YouTube video
+ check_requirements(('pafy', 'youtube_dl'))
+ import pafy
+ url = pafy.new(url).getbest(preftype="mp4").url
+ cap = cv2.VideoCapture(url)
+ assert cap.isOpened(), f'Failed to open {s}'
+ w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ self.fps = cap.get(cv2.CAP_PROP_FPS) % 100
+
+ _, self.imgs[i] = cap.read() # guarantee first frame
+ thread = Thread(target=self.update, args=([i, cap]), daemon=True)
+ print(f' success ({w}x{h} at {self.fps:.2f} FPS).')
+ thread.start()
+ print('') # newline
+
+ # check for common shapes
+ s = np.stack([letterbox(x, self.img_size, stride=self.stride)[0].shape for x in self.imgs], 0) # shapes
+ self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
+ if not self.rect:
+ print('WARNING: Different stream shapes detected. For optimal performance supply similarly-shaped streams.')
+
+ def update(self, index, cap):
+ # Read next stream frame in a daemon thread
+ n = 0
+ while cap.isOpened():
+ n += 1
+ # _, self.imgs[index] = cap.read()
+ cap.grab()
+ if n == 4: # read every 4th frame
+ success, im = cap.retrieve()
+ self.imgs[index] = im if success else self.imgs[index] * 0
+ n = 0
+ time.sleep(1 / self.fps) # wait time
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ img0 = self.imgs.copy()
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Letterbox
+ img = [letterbox(x, self.img_size, auto=self.rect, stride=self.stride)[0] for x in img0]
+
+ # Stack
+ img = np.stack(img, 0)
+
+ # Convert
+ img = img[:, :, :, ::-1].transpose(0, 3, 1, 2) # BGR to RGB, to bsx3x416x416
+ img = np.ascontiguousarray(img)
+
+ return self.sources, img, img0, None
+
+ def __len__(self):
+ return 0 # 1E12 frames = 32 streams at 30 FPS for 30 years
+
+
+def img2label_paths(img_paths):
+ # Define label paths as a function of image paths
+ sa, sb = os.sep + 'images' + os.sep, os.sep + 'labels' + os.sep # /images/, /labels/ substrings
+ return ['txt'.join(x.replace(sa, sb, 1).rsplit(x.split('.')[-1], 1)) for x in img_paths]
+
+
+class LoadImagesAndLabels(Dataset): # for training/testing
+ def __init__(self, path, img_size=640, batch_size=16, augment=False, hyp=None, rect=False, image_weights=False,
+ cache_images=False, single_cls=False, stride=32, pad=0.0, prefix=''):
+ self.img_size = img_size
+ self.augment = augment
+ self.hyp = hyp
+ self.image_weights = image_weights
+ self.rect = False if image_weights else rect
+ self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
+ self.mosaic_border = [-img_size // 2, -img_size // 2]
+ self.stride = stride
+ self.path = path
+ #self.albumentations = Albumentations() if augment else None
+
+ try:
+ f = [] # image files
+ for p in path if isinstance(path, list) else [path]:
+ p = Path(p) # os-agnostic
+ if p.is_dir(): # dir
+ f += glob.glob(str(p / '**' / '*.*'), recursive=True)
+ # f = list(p.rglob('**/*.*')) # pathlib
+ elif p.is_file(): # file
+ with open(p, 'r') as t:
+ t = t.read().strip().splitlines()
+ parent = str(p.parent) + os.sep
+ f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
+ # f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
+ else:
+ raise Exception(f'{prefix}{p} does not exist')
+ self.img_files = sorted([x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in img_formats])
+ # self.img_files = sorted([x for x in f if x.suffix[1:].lower() in img_formats]) # pathlib
+ assert self.img_files, f'{prefix}No images found'
+ except Exception as e:
+ raise Exception(f'{prefix}Error loading data from {path}: {e}\nSee {help_url}')
+
+ # Check cache
+ self.label_files = img2label_paths(self.img_files) # labels
+ cache_path = (p if p.is_file() else Path(self.label_files[0]).parent).with_suffix('.cache') # cached labels
+ if cache_path.is_file():
+ cache, exists = torch.load(cache_path), True # load
+ #if cache['hash'] != get_hash(self.label_files + self.img_files) or 'version' not in cache: # changed
+ # cache, exists = self.cache_labels(cache_path, prefix), False # re-cache
+ else:
+ cache, exists = self.cache_labels(cache_path, prefix), False # cache
+
+ # Display cache
+ nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupted, total
+ if exists:
+ d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupted"
+ tqdm(None, desc=prefix + d, total=n, initial=n) # display cache results
+ assert nf > 0 or not augment, f'{prefix}No labels in {cache_path}. Can not train without labels. See {help_url}'
+
+ # Read cache
+ cache.pop('hash') # remove hash
+ cache.pop('version') # remove version
+ labels, shapes, self.segments = zip(*cache.values())
+ self.labels = list(labels)
+ self.shapes = np.array(shapes, dtype=np.float64)
+ self.img_files = list(cache.keys()) # update
+ self.label_files = img2label_paths(cache.keys()) # update
+ if single_cls:
+ for x in self.labels:
+ x[:, 0] = 0
+
+ n = len(shapes) # number of images
+ bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
+ nb = bi[-1] + 1 # number of batches
+ self.batch = bi # batch index of image
+ self.n = n
+ self.indices = range(n)
+
+ # Rectangular Training
+ if self.rect:
+ # Sort by aspect ratio
+ s = self.shapes # wh
+ ar = s[:, 1] / s[:, 0] # aspect ratio
+ irect = ar.argsort()
+ self.img_files = [self.img_files[i] for i in irect]
+ self.label_files = [self.label_files[i] for i in irect]
+ self.labels = [self.labels[i] for i in irect]
+ self.shapes = s[irect] # wh
+ ar = ar[irect]
+
+ # Set training image shapes
+ shapes = [[1, 1]] * nb
+ for i in range(nb):
+ ari = ar[bi == i]
+ mini, maxi = ari.min(), ari.max()
+ if maxi < 1:
+ shapes[i] = [maxi, 1]
+ elif mini > 1:
+ shapes[i] = [1, 1 / mini]
+
+ self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(np.int) * stride
+
+ # Cache images into memory for faster training (WARNING: large datasets may exceed system RAM)
+ self.imgs = [None] * n
+ if cache_images:
+ if cache_images == 'disk':
+ self.im_cache_dir = Path(Path(self.img_files[0]).parent.as_posix() + '_npy')
+ self.img_npy = [self.im_cache_dir / Path(f).with_suffix('.npy').name for f in self.img_files]
+ self.im_cache_dir.mkdir(parents=True, exist_ok=True)
+ gb = 0 # Gigabytes of cached images
+ self.img_hw0, self.img_hw = [None] * n, [None] * n
+ results = ThreadPool(8).imap(lambda x: load_image(*x), zip(repeat(self), range(n)))
+ pbar = tqdm(enumerate(results), total=n)
+ for i, x in pbar:
+ if cache_images == 'disk':
+ if not self.img_npy[i].exists():
+ np.save(self.img_npy[i].as_posix(), x[0])
+ gb += self.img_npy[i].stat().st_size
+ else:
+ self.imgs[i], self.img_hw0[i], self.img_hw[i] = x
+ gb += self.imgs[i].nbytes
+ pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB)'
+ pbar.close()
+
+ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
+ # Cache dataset labels, check images and read shapes
+ x = {} # dict
+ nm, nf, ne, nc = 0, 0, 0, 0 # number missing, found, empty, duplicate
+ pbar = tqdm(zip(self.img_files, self.label_files), desc='Scanning images', total=len(self.img_files))
+ for i, (im_file, lb_file) in enumerate(pbar):
+ try:
+ # verify images
+ im = Image.open(im_file)
+ im.verify() # PIL verify
+ shape = exif_size(im) # image size
+ segments = [] # instance segments
+ assert (shape[0] > 9) & (shape[1] > 9), f'image size {shape} <10 pixels'
+ assert im.format.lower() in img_formats, f'invalid image format {im.format}'
+
+ # verify labels
+ if os.path.isfile(lb_file):
+ nf += 1 # label found
+ with open(lb_file, 'r') as f:
+ l = [x.split() for x in f.read().strip().splitlines()]
+ if any([len(x) > 8 for x in l]): # is segment
+ classes = np.array([x[0] for x in l], dtype=np.float32)
+ segments = [np.array(x[1:], dtype=np.float32).reshape(-1, 2) for x in l] # (cls, xy1...)
+ l = np.concatenate((classes.reshape(-1, 1), segments2boxes(segments)), 1) # (cls, xywh)
+ l = np.array(l, dtype=np.float32)
+ if len(l):
+ assert l.shape[1] == 5, 'labels require 5 columns each'
+ assert (l >= 0).all(), 'negative labels'
+ assert (l[:, 1:] <= 1).all(), 'non-normalized or out of bounds coordinate labels'
+ assert np.unique(l, axis=0).shape[0] == l.shape[0], 'duplicate labels'
+ else:
+ ne += 1 # label empty
+ l = np.zeros((0, 5), dtype=np.float32)
+ else:
+ nm += 1 # label missing
+ l = np.zeros((0, 5), dtype=np.float32)
+ x[im_file] = [l, shape, segments]
+ except Exception as e:
+ nc += 1
+ print(f'{prefix}WARNING: Ignoring corrupted image and/or label {im_file}: {e}')
+
+ pbar.desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels... " \
+ f"{nf} found, {nm} missing, {ne} empty, {nc} corrupted"
+ pbar.close()
+
+ if nf == 0:
+ print(f'{prefix}WARNING: No labels found in {path}. See {help_url}')
+
+ x['hash'] = get_hash(self.label_files + self.img_files)
+ x['results'] = nf, nm, ne, nc, i + 1
+ x['version'] = 0.1 # cache version
+ torch.save(x, path) # save for next time
+ logging.info(f'{prefix}New cache created: {path}')
+ return x
+
+ def __len__(self):
+ return len(self.img_files)
+
+ # def __iter__(self):
+ # self.count = -1
+ # print('ran dataset iter')
+ # #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
+ # return self
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ if mosaic:
+ # Load mosaic
+ if random.random() < 0.8:
+ img, labels = load_mosaic(self, index)
+ else:
+ img, labels = load_mosaic9(self, index)
+ shapes = None
+
+ # MixUp https://arxiv.org/pdf/1710.09412.pdf
+ if random.random() < hyp['mixup']:
+ if random.random() < 0.8:
+ img2, labels2 = load_mosaic(self, random.randint(0, len(self.labels) - 1))
+ else:
+ img2, labels2 = load_mosaic9(self, random.randint(0, len(self.labels) - 1))
+ r = np.random.beta(8.0, 8.0) # mixup ratio, alpha=beta=8.0
+ img = (img * r + img2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = load_image(self, index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ # Augment imagespace
+ if not mosaic:
+ img, labels = random_perspective(img, labels,
+ degrees=hyp['degrees'],
+ translate=hyp['translate'],
+ scale=hyp['scale'],
+ shear=hyp['shear'],
+ perspective=hyp['perspective'])
+
+
+ #img, labels = self.albumentations(img, labels)
+
+ # Augment colorspace
+ augment_hsv(img, hgain=hyp['hsv_h'], sgain=hyp['hsv_s'], vgain=hyp['hsv_v'])
+
+ # Apply cutouts
+ # if random.random() < 0.9:
+ # labels = cutout(img, labels)
+
+ if random.random() < hyp['paste_in']:
+ sample_labels, sample_images, sample_masks = [], [], []
+ while len(sample_labels) < 30:
+ sample_labels_, sample_images_, sample_masks_ = load_samples(self, random.randint(0, len(self.labels) - 1))
+ sample_labels += sample_labels_
+ sample_images += sample_images_
+ sample_masks += sample_masks_
+ #print(len(sample_labels))
+ if len(sample_labels) == 0:
+ break
+ labels = pastein(img, labels, sample_labels, sample_images, sample_masks)
+
+ nL = len(labels) # number of labels
+ if nL:
+ labels[:, 1:5] = xyxy2xywh(labels[:, 1:5]) # convert xyxy to xywh
+ labels[:, [2, 4]] /= img.shape[0] # normalized height 0-1
+ labels[:, [1, 3]] /= img.shape[1] # normalized width 0-1
+
+ if self.augment:
+ # flip up-down
+ if random.random() < hyp['flipud']:
+ img = np.flipud(img)
+ if nL:
+ labels[:, 2] = 1 - labels[:, 2]
+
+ # flip left-right
+ if random.random() < hyp['fliplr']:
+ img = np.fliplr(img)
+ if nL:
+ labels[:, 1] = 1 - labels[:, 1]
+
+ labels_out = torch.zeros((nL, 6))
+ if nL:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return torch.from_numpy(img), labels_out, self.img_files[index], shapes
+
+ @staticmethod
+ def collate_fn(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ for i, l in enumerate(label):
+ l[:, 0] = i # add target image index for build_targets()
+ return torch.stack(img, 0), torch.cat(label, 0), path, shapes
+
+ @staticmethod
+ def collate_fn4(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ n = len(shapes) // 4
+ img4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
+
+ ho = torch.tensor([[0., 0, 0, 1, 0, 0]])
+ wo = torch.tensor([[0., 0, 1, 0, 0, 0]])
+ s = torch.tensor([[1, 1, .5, .5, .5, .5]]) # scale
+ for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
+ i *= 4
+ if random.random() < 0.5:
+ im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2., mode='bilinear', align_corners=False)[
+ 0].type(img[i].type())
+ l = label[i]
+ else:
+ im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
+ l = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
+ img4.append(im)
+ label4.append(l)
+
+ for i, l in enumerate(label4):
+ l[:, 0] = i # add target image index for build_targets()
+
+ return torch.stack(img4, 0), torch.cat(label4, 0), path4, shapes4
+
+
+# Ancillary functions --------------------------------------------------------------------------------------------------
+def load_image(self, index):
+ # loads 1 image from dataset, returns img, original hw, resized hw
+ img = self.imgs[index]
+ if img is None: # not cached
+ path = self.img_files[index]
+ img = cv2.imread(path) # BGR
+ assert img is not None, 'Image Not Found ' + path
+ h0, w0 = img.shape[:2] # orig hw
+ r = self.img_size / max(h0, w0) # resize image to img_size
+ if r != 1: # always resize down, only resize up if training with augmentation
+ interp = cv2.INTER_AREA if r < 1 and not self.augment else cv2.INTER_LINEAR
+ img = cv2.resize(img, (int(w0 * r), int(h0 * r)), interpolation=interp)
+ return img, (h0, w0), img.shape[:2] # img, hw_original, hw_resized
+ else:
+ return self.imgs[index], self.img_hw0[index], self.img_hw[index] # img, hw_original, hw_resized
+
+
+def augment_hsv(img, hgain=0.5, sgain=0.5, vgain=0.5):
+ r = np.random.uniform(-1, 1, 3) * [hgain, sgain, vgain] + 1 # random gains
+ hue, sat, val = cv2.split(cv2.cvtColor(img, cv2.COLOR_BGR2HSV))
+ dtype = img.dtype # uint8
+
+ x = np.arange(0, 256, dtype=np.int16)
+ lut_hue = ((x * r[0]) % 180).astype(dtype)
+ lut_sat = np.clip(x * r[1], 0, 255).astype(dtype)
+ lut_val = np.clip(x * r[2], 0, 255).astype(dtype)
+
+ img_hsv = cv2.merge((cv2.LUT(hue, lut_hue), cv2.LUT(sat, lut_sat), cv2.LUT(val, lut_val))).astype(dtype)
+ cv2.cvtColor(img_hsv, cv2.COLOR_HSV2BGR, dst=img) # no return needed
+
+
+def hist_equalize(img, clahe=True, bgr=False):
+ # Equalize histogram on BGR image 'img' with img.shape(n,m,3) and range 0-255
+ yuv = cv2.cvtColor(img, cv2.COLOR_BGR2YUV if bgr else cv2.COLOR_RGB2YUV)
+ if clahe:
+ c = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
+ yuv[:, :, 0] = c.apply(yuv[:, :, 0])
+ else:
+ yuv[:, :, 0] = cv2.equalizeHist(yuv[:, :, 0]) # equalize Y channel histogram
+ return cv2.cvtColor(yuv, cv2.COLOR_YUV2BGR if bgr else cv2.COLOR_YUV2RGB) # convert YUV image to RGB
+
+
+def load_mosaic(self, index):
+ # loads images in a 4-mosaic
+
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ #img4, labels4, segments4 = remove_background(img4, labels4, segments4)
+ #sample_segments(img4, labels4, segments4, probability=self.hyp['copy_paste'])
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, probability=self.hyp['copy_paste'])
+ img4, labels4 = random_perspective(img4, labels4, segments4,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img4, labels4
+
+
+def load_mosaic9(self, index):
+ # loads images in a 9-mosaic
+
+ labels9, segments9 = [], []
+ s = self.img_size
+ indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img9
+ if i == 0: # center
+ img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ h0, w0 = h, w
+ c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
+ elif i == 1: # top
+ c = s, s - h, s + w, s
+ elif i == 2: # top right
+ c = s + wp, s - h, s + wp + w, s
+ elif i == 3: # right
+ c = s + w0, s, s + w0 + w, s + h
+ elif i == 4: # bottom right
+ c = s + w0, s + hp, s + w0 + w, s + hp + h
+ elif i == 5: # bottom
+ c = s + w0 - w, s + h0, s + w0, s + h0 + h
+ elif i == 6: # bottom left
+ c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
+ elif i == 7: # left
+ c = s - w, s + h0 - h, s, s + h0
+ elif i == 8: # top left
+ c = s - w, s + h0 - hp - h, s, s + h0 - hp
+
+ padx, pady = c[:2]
+ x1, y1, x2, y2 = [max(x, 0) for x in c] # allocate coords
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
+ labels9.append(labels)
+ segments9.extend(segments)
+
+ # Image
+ img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
+ hp, wp = h, w # height, width previous
+
+ # Offset
+ yc, xc = [int(random.uniform(0, s)) for _ in self.mosaic_border] # mosaic center x, y
+ img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
+
+ # Concat/clip labels
+ labels9 = np.concatenate(labels9, 0)
+ labels9[:, [1, 3]] -= xc
+ labels9[:, [2, 4]] -= yc
+ c = np.array([xc, yc]) # centers
+ segments9 = [x - c for x in segments9]
+
+ for x in (labels9[:, 1:], *segments9):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img9, labels9 = replicate(img9, labels9) # replicate
+
+ # Augment
+ #img9, labels9, segments9 = remove_background(img9, labels9, segments9)
+ img9, labels9, segments9 = copy_paste(img9, labels9, segments9, probability=self.hyp['copy_paste'])
+ img9, labels9 = random_perspective(img9, labels9, segments9,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img9, labels9
+
+
+def load_samples(self, index):
+ # loads images in a 4-mosaic
+
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ #img4, labels4, segments4 = remove_background(img4, labels4, segments4)
+ sample_labels, sample_images, sample_masks = sample_segments(img4, labels4, segments4, probability=0.5)
+
+ return sample_labels, sample_images, sample_masks
+
+
+def copy_paste(img, labels, segments, probability=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ if probability and n:
+ h, w, c = img.shape # height, width, channels
+ im_new = np.zeros(img.shape, np.uint8)
+ for j in random.sample(range(n), k=round(probability * n)):
+ l, s = labels[j], segments[j]
+ box = w - l[3], l[2], w - l[1], l[4]
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
+ labels = np.concatenate((labels, [[l[0], *box]]), 0)
+ segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=img, src2=im_new)
+ result = cv2.flip(result, 1) # augment segments (flip left-right)
+ i = result > 0 # pixels to replace
+ # i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
+ img[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+
+ return img, labels, segments
+
+
+def remove_background(img, labels, segments):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ h, w, c = img.shape # height, width, channels
+ im_new = np.zeros(img.shape, np.uint8)
+ img_new = np.ones(img.shape, np.uint8) * 114
+ for j in range(n):
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=img, src2=im_new)
+
+ i = result > 0 # pixels to replace
+ img_new[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+
+ return img_new, labels, segments
+
+
+def sample_segments(img, labels, segments, probability=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ sample_labels = []
+ sample_images = []
+ sample_masks = []
+ if probability and n:
+ h, w, c = img.shape # height, width, channels
+ for j in random.sample(range(n), k=round(probability * n)):
+ l, s = labels[j], segments[j]
+ box = l[1].astype(int).clip(0,w-1), l[2].astype(int).clip(0,h-1), l[3].astype(int).clip(0,w-1), l[4].astype(int).clip(0,h-1)
+
+ #print(box)
+ if (box[2] <= box[0]) or (box[3] <= box[1]):
+ continue
+
+ sample_labels.append(l[0])
+
+ mask = np.zeros(img.shape, np.uint8)
+
+ cv2.drawContours(mask, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+ sample_masks.append(mask[box[1]:box[3],box[0]:box[2],:])
+
+ result = cv2.bitwise_and(src1=img, src2=mask)
+ i = result > 0 # pixels to replace
+ mask[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+ #print(box)
+ sample_images.append(mask[box[1]:box[3],box[0]:box[2],:])
+
+ return sample_labels, sample_images, sample_masks
+
+
+def replicate(img, labels):
+ # Replicate labels
+ h, w = img.shape[:2]
+ boxes = labels[:, 1:].astype(int)
+ x1, y1, x2, y2 = boxes.T
+ s = ((x2 - x1) + (y2 - y1)) / 2 # side length (pixels)
+ for i in s.argsort()[:round(s.size * 0.5)]: # smallest indices
+ x1b, y1b, x2b, y2b = boxes[i]
+ bh, bw = y2b - y1b, x2b - x1b
+ yc, xc = int(random.uniform(0, h - bh)), int(random.uniform(0, w - bw)) # offset x, y
+ x1a, y1a, x2a, y2a = [xc, yc, xc + bw, yc + bh]
+ img[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ labels = np.append(labels, [[labels[i, 0], x1a, y1a, x2a, y2a]], axis=0)
+
+ return img, labels
+
+
+def letterbox(img, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
+ # Resize and pad image while meeting stride-multiple constraints
+ shape = img.shape[:2] # current shape [height, width]
+ if isinstance(new_shape, int):
+ new_shape = (new_shape, new_shape)
+
+ # Scale ratio (new / old)
+ r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
+ if not scaleup: # only scale down, do not scale up (for better test mAP)
+ r = min(r, 1.0)
+
+ # Compute padding
+ ratio = r, r # width, height ratios
+ new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
+ dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
+ if auto: # minimum rectangle
+ dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
+ elif scaleFill: # stretch
+ dw, dh = 0.0, 0.0
+ new_unpad = (new_shape[1], new_shape[0])
+ ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
+
+ dw /= 2 # divide padding into 2 sides
+ dh /= 2
+
+ if shape[::-1] != new_unpad: # resize
+ img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
+ top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
+ left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
+ img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
+ return img, ratio, (dw, dh)
+
+
+def random_perspective(img, targets=(), segments=(), degrees=10, translate=.1, scale=.1, shear=10, perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = img.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = img.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -img.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -img.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1.1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
+ T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ img = cv2.warpPerspective(img, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ img = cv2.warpAffine(img, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(img[:, :, ::-1]) # base
+ # ax[1].imshow(img2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ if n:
+ use_segments = any(x.any() for x in segments)
+ new = np.zeros((n, 4))
+ if use_segments: # warp segments
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+
+ else: # warp boxes
+ xy = np.ones((n * 4, 3))
+ xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
+
+ # create new boxes
+ x = xy[:, [0, 2, 4, 6]]
+ y = xy[:, [1, 3, 5, 7]]
+ new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
+
+ # clip
+ new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
+ new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+
+ return img, targets
+
+
+def box_candidates(box1, box2, wh_thr=2, ar_thr=20, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
+ # Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
+ w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
+ w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
+ ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
+ return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
+
+
+def bbox_ioa(box1, box2):
+ # Returns the intersection over box2 area given box1, box2. box1 is 4, box2 is nx4. boxes are x1y1x2y2
+ box2 = box2.transpose()
+
+ # Get the coordinates of bounding boxes
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+
+ # Intersection area
+ inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
+ (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)
+
+ # box2 area
+ box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + 1e-16
+
+ # Intersection over box2 area
+ return inter_area / box2_area
+
+
+def cutout(image, labels):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ h, w = image.shape[:2]
+
+ # create random masks
+ scales = [0.5] * 1 + [0.25] * 2 + [0.125] * 4 + [0.0625] * 8 + [0.03125] * 16 # image size fraction
+ for s in scales:
+ mask_h = random.randint(1, int(h * s))
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ # apply random color mask
+ image[ymin:ymax, xmin:xmax] = [random.randint(64, 191) for _ in range(3)]
+
+ # return unobscured labels
+ if len(labels) and s > 0.03:
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ labels = labels[ioa < 0.60] # remove >60% obscured labels
+
+ return labels
+
+
+def pastein(image, labels, sample_labels, sample_images, sample_masks):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ h, w = image.shape[:2]
+
+ # create random masks
+ scales = [0.75] * 2 + [0.5] * 4 + [0.25] * 4 + [0.125] * 4 + [0.0625] * 6 # image size fraction
+ for s in scales:
+ if random.random() < 0.2:
+ continue
+ mask_h = random.randint(1, int(h * s))
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ if len(labels):
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ else:
+ ioa = np.zeros(1)
+
+ if (ioa < 0.30).all() and len(sample_labels) and (xmax > xmin+20) and (ymax > ymin+20): # allow 30% obscuration of existing labels
+ sel_ind = random.randint(0, len(sample_labels)-1)
+ #print(len(sample_labels))
+ #print(sel_ind)
+ #print((xmax-xmin, ymax-ymin))
+ #print(image[ymin:ymax, xmin:xmax].shape)
+ #print([[sample_labels[sel_ind], *box]])
+ #print(labels.shape)
+ hs, ws, cs = sample_images[sel_ind].shape
+ r_scale = min((ymax-ymin)/hs, (xmax-xmin)/ws)
+ r_w = int(ws*r_scale)
+ r_h = int(hs*r_scale)
+
+ if (r_w > 10) and (r_h > 10):
+ r_mask = cv2.resize(sample_masks[sel_ind], (r_w, r_h))
+ r_image = cv2.resize(sample_images[sel_ind], (r_w, r_h))
+ temp_crop = image[ymin:ymin+r_h, xmin:xmin+r_w]
+ m_ind = r_mask > 0
+ if m_ind.astype(np.int).sum() > 60:
+ temp_crop[m_ind] = r_image[m_ind]
+ #print(sample_labels[sel_ind])
+ #print(sample_images[sel_ind].shape)
+ #print(temp_crop.shape)
+ box = np.array([xmin, ymin, xmin+r_w, ymin+r_h], dtype=np.float32)
+ if len(labels):
+ labels = np.concatenate((labels, [[sample_labels[sel_ind], *box]]), 0)
+ else:
+ labels = np.array([[sample_labels[sel_ind], *box]])
+
+ image[ymin:ymin+r_h, xmin:xmin+r_w] = temp_crop
+
+ return labels
+
+class Albumentations:
+ # YOLOv5 Albumentations class (optional, only used if package is installed)
+ def __init__(self):
+ self.transform = None
+ import albumentations as A
+
+ self.transform = A.Compose([
+ A.CLAHE(p=0.01),
+ A.RandomBrightnessContrast(brightness_limit=0.2, contrast_limit=0.2, p=0.01),
+ A.RandomGamma(gamma_limit=[80, 120], p=0.01),
+ A.Blur(p=0.01),
+ A.MedianBlur(p=0.01),
+ A.ToGray(p=0.01),
+ A.ImageCompression(quality_lower=75, p=0.01),],
+ bbox_params=A.BboxParams(format='pascal_voc', label_fields=['class_labels']))
+
+ #logging.info(colorstr('albumentations: ') + ', '.join(f'{x}' for x in self.transform.transforms if x.p))
+
+ def __call__(self, im, labels, p=1.0):
+ if self.transform and random.random() < p:
+ new = self.transform(image=im, bboxes=labels[:, 1:], class_labels=labels[:, 0]) # transformed
+ im, labels = new['image'], np.array([[c, *b] for c, b in zip(new['class_labels'], new['bboxes'])])
+ return im, labels
+
+
+def create_folder(path='./new'):
+ # Create folder
+ if os.path.exists(path):
+ shutil.rmtree(path) # delete output folder
+ os.makedirs(path) # make new output folder
+
+
+def flatten_recursive(path='../coco'):
+ # Flatten a recursive directory by bringing all files to top level
+ new_path = Path(path + '_flat')
+ create_folder(new_path)
+ for file in tqdm(glob.glob(str(Path(path)) + '/**/*.*', recursive=True)):
+ shutil.copyfile(file, new_path / Path(file).name)
+
+
+def extract_boxes(path='../coco/'): # from utils.datasets import *; extract_boxes('../coco128')
+ # Convert detection dataset into classification dataset, with one directory per class
+
+ path = Path(path) # images dir
+ shutil.rmtree(path / 'classifier') if (path / 'classifier').is_dir() else None # remove existing
+ files = list(path.rglob('*.*'))
+ n = len(files) # number of files
+ for im_file in tqdm(files, total=n):
+ if im_file.suffix[1:] in img_formats:
+ # image
+ im = cv2.imread(str(im_file))[..., ::-1] # BGR to RGB
+ h, w = im.shape[:2]
+
+ # labels
+ lb_file = Path(img2label_paths([str(im_file)])[0])
+ if Path(lb_file).exists():
+ with open(lb_file, 'r') as f:
+ lb = np.array([x.split() for x in f.read().strip().splitlines()], dtype=np.float32) # labels
+
+ for j, x in enumerate(lb):
+ c = int(x[0]) # class
+ f = (path / 'classifier') / f'{c}' / f'{path.stem}_{im_file.stem}_{j}.jpg' # new filename
+ if not f.parent.is_dir():
+ f.parent.mkdir(parents=True)
+
+ b = x[1:] * [w, h, w, h] # box
+ # b[2:] = b[2:].max() # rectangle to square
+ b[2:] = b[2:] * 1.2 + 3 # pad
+ b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
+
+ b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
+ b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
+ assert cv2.imwrite(str(f), im[b[1]:b[3], b[0]:b[2]]), f'box failure in {f}'
+
+
+def autosplit(path='../coco', weights=(0.9, 0.1, 0.0), annotated_only=False):
+ """ Autosplit a dataset into train/val/test splits and save path/autosplit_*.txt files
+ Usage: from utils.datasets import *; autosplit('../coco')
+ Arguments
+ path: Path to images directory
+ weights: Train, val, test weights (list)
+ annotated_only: Only use images with an annotated txt file
+ """
+ path = Path(path) # images dir
+ files = sum([list(path.rglob(f"*.{img_ext}")) for img_ext in img_formats], []) # image files only
+ n = len(files) # number of files
+ indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
+
+ txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
+ [(path / x).unlink() for x in txt if (path / x).exists()] # remove existing
+
+ print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
+ for i, img in tqdm(zip(indices, files), total=n):
+ if not annotated_only or Path(img2label_paths([str(img)])[0]).exists(): # check label
+ with open(path / txt[i], 'a') as f:
+ f.write(str(img) + '\n') # add image to txt file
+
+
+def load_segmentations(self, index):
+ key = '/work/handsomejw66/coco17/' + self.img_files[index]
+ #print(key)
+ # /work/handsomejw66/coco17/
+ return self.segs[key]
diff --git a/oneAPI_ODAV_APP/utils/general.py b/oneAPI_ODAV_APP/utils/general.py
new file mode 100644
index 000000000..cca7a97eb
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/general.py
@@ -0,0 +1,893 @@
+# YOLOR general utils
+
+import glob
+import logging
+import math
+import os
+import platform
+import random
+import re
+import subprocess
+import time
+from pathlib import Path
+
+import cv2
+import numpy as np
+import pandas as pd
+import torch
+import torchvision
+import yaml
+
+from utils.google_utils import gsutil_getsize
+from utils.metrics import fitness
+from utils.torch_utils import init_torch_seeds
+
+
+# Settings
+torch.set_printoptions(linewidth=320, precision=5, profile='long')
+np.set_printoptions(linewidth=320, formatter={'float_kind': '{:11.5g}'.format}) # format short g, %precision=5
+pd.options.display.max_columns = 10
+cv2.setNumThreads(0) # prevent OpenCV from multithreading (incompatible with PyTorch DataLoader)
+os.environ['NUMEXPR_MAX_THREADS'] = str(min(os.cpu_count(), 8)) # NumExpr max threads
+
+
+def set_logging(rank=-1):
+ logging.basicConfig(
+ format="%(message)s",
+ level=logging.INFO if rank in [-1, 0] else logging.WARN)
+
+
+def init_seeds(seed=0):
+ # Initialize random number generator (RNG) seeds
+ random.seed(seed)
+ np.random.seed(seed)
+ init_torch_seeds(seed)
+
+
+def get_latest_run(search_dir='.'):
+ # Return path to most recent 'last.pt' in /runs (i.e. to --resume from)
+ last_list = glob.glob(f'{search_dir}/**/last*.pt', recursive=True)
+ return max(last_list, key=os.path.getctime) if last_list else ''
+
+
+def isdocker():
+ # Is environment a Docker container
+ return Path('/workspace').exists() # or Path('/.dockerenv').exists()
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+def check_online():
+ # Check internet connectivity
+ import socket
+ try:
+ socket.create_connection(("1.1.1.1", 443), 5) # check host accesability
+ return True
+ except OSError:
+ return False
+
+
+def check_git_status():
+ # Recommend 'git pull' if code is out of date
+ print(colorstr('github: '), end='')
+ try:
+ assert Path('.git').exists(), 'skipping check (not a git repository)'
+ assert not isdocker(), 'skipping check (Docker image)'
+ assert check_online(), 'skipping check (offline)'
+
+ cmd = 'git fetch && git config --get remote.origin.url'
+ url = subprocess.check_output(cmd, shell=True).decode().strip().rstrip('.git') # github repo url
+ branch = subprocess.check_output('git rev-parse --abbrev-ref HEAD', shell=True).decode().strip() # checked out
+ n = int(subprocess.check_output(f'git rev-list {branch}..origin/master --count', shell=True)) # commits behind
+ if n > 0:
+ s = f"⚠️ WARNING: code is out of date by {n} commit{'s' * (n > 1)}. " \
+ f"Use 'git pull' to update or 'git clone {url}' to download latest."
+ else:
+ s = f'up to date with {url} ✅'
+ print(emojis(s)) # emoji-safe
+ except Exception as e:
+ print(e)
+
+
+def check_requirements(requirements='requirements.txt', exclude=()):
+ # Check installed dependencies meet requirements (pass *.txt file or list of packages)
+ import pkg_resources as pkg
+ prefix = colorstr('red', 'bold', 'requirements:')
+ if isinstance(requirements, (str, Path)): # requirements.txt file
+ file = Path(requirements)
+ if not file.exists():
+ print(f"{prefix} {file.resolve()} not found, check failed.")
+ return
+ requirements = [f'{x.name}{x.specifier}' for x in pkg.parse_requirements(file.open()) if x.name not in exclude]
+ else: # list or tuple of packages
+ requirements = [x for x in requirements if x not in exclude]
+
+ n = 0 # number of packages updates
+ for r in requirements:
+ try:
+ pkg.require(r)
+ except Exception as e: # DistributionNotFound or VersionConflict if requirements not met
+ n += 1
+ print(f"{prefix} {e.req} not found and is required by YOLOR, attempting auto-update...")
+ print(subprocess.check_output(f"pip install '{e.req}'", shell=True).decode())
+
+ if n: # if packages updated
+ source = file.resolve() if 'file' in locals() else requirements
+ s = f"{prefix} {n} package{'s' * (n > 1)} updated per {source}\n" \
+ f"{prefix} ⚠️ {colorstr('bold', 'Restart runtime or rerun command for updates to take effect')}\n"
+ print(emojis(s)) # emoji-safe
+
+
+def check_img_size(img_size, s=32):
+ # Verify img_size is a multiple of stride s
+ new_size = make_divisible(img_size, int(s)) # ceil gs-multiple
+ if new_size != img_size:
+ print('WARNING: --img-size %g must be multiple of max stride %g, updating to %g' % (img_size, s, new_size))
+ return new_size
+
+
+def check_imshow():
+ # Check if environment supports image displays
+ try:
+ assert not isdocker(), 'cv2.imshow() is disabled in Docker environments'
+ cv2.imshow('test', np.zeros((1, 1, 3)))
+ cv2.waitKey(1)
+ cv2.destroyAllWindows()
+ cv2.waitKey(1)
+ return True
+ except Exception as e:
+ print(f'WARNING: Environment does not support cv2.imshow() or PIL Image.show() image displays\n{e}')
+ return False
+
+
+def check_file(file):
+ # Search for file if not found
+ if Path(file).is_file() or file == '':
+ return file
+ else:
+ files = glob.glob('./**/' + file, recursive=True) # find file
+ assert len(files), f'File Not Found: {file}' # assert file was found
+ assert len(files) == 1, f"Multiple files match '{file}', specify exact path: {files}" # assert unique
+ return files[0] # return file
+
+
+def check_dataset(dict):
+ # Download dataset if not found locally
+ val, s = dict.get('val'), dict.get('download')
+ if val and len(val):
+ val = [Path(x).resolve() for x in (val if isinstance(val, list) else [val])] # val path
+ if not all(x.exists() for x in val):
+ print('\nWARNING: Dataset not found, nonexistent paths: %s' % [str(x) for x in val if not x.exists()])
+ if s and len(s): # download script
+ print('Downloading %s ...' % s)
+ if s.startswith('http') and s.endswith('.zip'): # URL
+ f = Path(s).name # filename
+ torch.hub.download_url_to_file(s, f)
+ r = os.system('unzip -q %s -d ../ && rm %s' % (f, f)) # unzip
+ else: # bash script
+ r = os.system(s)
+ print('Dataset autodownload %s\n' % ('success' if r == 0 else 'failure')) # analyze return value
+ else:
+ raise Exception('Dataset not found.')
+
+
+def make_divisible(x, divisor):
+ # Returns x evenly divisible by divisor
+ return math.ceil(x / divisor) * divisor
+
+
+def clean_str(s):
+ # Cleans a string by replacing special characters with underscore _
+ return re.sub(pattern="[|@#!¡·$€%&()=?¿^*;:,¨´><+]", repl="_", string=s)
+
+
+def one_cycle(y1=0.0, y2=1.0, steps=100):
+ # lambda function for sinusoidal ramp from y1 to y2
+ return lambda x: ((1 - math.cos(x * math.pi / steps)) / 2) * (y2 - y1) + y1
+
+
+def colorstr(*input):
+ # Colors a string https://en.wikipedia.org/wiki/ANSI_escape_code, i.e. colorstr('blue', 'hello world')
+ *args, string = input if len(input) > 1 else ('blue', 'bold', input[0]) # color arguments, string
+ colors = {'black': '\033[30m', # basic colors
+ 'red': '\033[31m',
+ 'green': '\033[32m',
+ 'yellow': '\033[33m',
+ 'blue': '\033[34m',
+ 'magenta': '\033[35m',
+ 'cyan': '\033[36m',
+ 'white': '\033[37m',
+ 'bright_black': '\033[90m', # bright colors
+ 'bright_red': '\033[91m',
+ 'bright_green': '\033[92m',
+ 'bright_yellow': '\033[93m',
+ 'bright_blue': '\033[94m',
+ 'bright_magenta': '\033[95m',
+ 'bright_cyan': '\033[96m',
+ 'bright_white': '\033[97m',
+ 'end': '\033[0m', # misc
+ 'bold': '\033[1m',
+ 'underline': '\033[4m'}
+ return ''.join(colors[x] for x in args) + f'{string}' + colors['end']
+
+
+def labels_to_class_weights(labels, nc=80):
+ # Get class weights (inverse frequency) from training labels
+ if labels[0] is None: # no labels loaded
+ return torch.Tensor()
+
+ labels = np.concatenate(labels, 0) # labels.shape = (866643, 5) for COCO
+ classes = labels[:, 0].astype(np.int) # labels = [class xywh]
+ weights = np.bincount(classes, minlength=nc) # occurrences per class
+
+ # Prepend gridpoint count (for uCE training)
+ # gpi = ((320 / 32 * np.array([1, 2, 4])) ** 2 * 3).sum() # gridpoints per image
+ # weights = np.hstack([gpi * len(labels) - weights.sum() * 9, weights * 9]) ** 0.5 # prepend gridpoints to start
+
+ weights[weights == 0] = 1 # replace empty bins with 1
+ weights = 1 / weights # number of targets per class
+ weights /= weights.sum() # normalize
+ return torch.from_numpy(weights)
+
+
+def labels_to_image_weights(labels, nc=80, class_weights=np.ones(80)):
+ # Produces image weights based on class_weights and image contents
+ class_counts = np.array([np.bincount(x[:, 0].astype(np.int), minlength=nc) for x in labels])
+ image_weights = (class_weights.reshape(1, nc) * class_counts).sum(1)
+ # index = random.choices(range(n), weights=image_weights, k=1) # weight image sample
+ return image_weights
+
+
+def coco80_to_coco91_class(): # converts 80-index (val2014) to 91-index (paper)
+ # https://tech.amikelive.com/node-718/what-object-categories-labels-are-in-coco-dataset/
+ # a = np.loadtxt('data/coco.names', dtype='str', delimiter='\n')
+ # b = np.loadtxt('data/coco_paper.names', dtype='str', delimiter='\n')
+ # x1 = [list(a[i] == b).index(True) + 1 for i in range(80)] # darknet to coco
+ # x2 = [list(b[i] == a).index(True) if any(b[i] == a) else None for i in range(91)] # coco to darknet
+ x = [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 27, 28, 31, 32, 33, 34,
+ 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63,
+ 64, 65, 67, 70, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 84, 85, 86, 87, 88, 89, 90]
+ return x
+
+
+def xyxy2xywh(x):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = (x[:, 0] + x[:, 2]) / 2 # x center
+ y[:, 1] = (x[:, 1] + x[:, 3]) / 2 # y center
+ y[:, 2] = x[:, 2] - x[:, 0] # width
+ y[:, 3] = x[:, 3] - x[:, 1] # height
+ return y
+
+
+def xywh2xyxy(x):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
+ y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
+ y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
+ y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
+ return y
+
+
+def xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):
+ # Convert nx4 boxes from [x, y, w, h] normalized to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * (x[:, 0] - x[:, 2] / 2) + padw # top left x
+ y[:, 1] = h * (x[:, 1] - x[:, 3] / 2) + padh # top left y
+ y[:, 2] = w * (x[:, 0] + x[:, 2] / 2) + padw # bottom right x
+ y[:, 3] = h * (x[:, 1] + x[:, 3] / 2) + padh # bottom right y
+ return y
+
+
+def xyn2xy(x, w=640, h=640, padw=0, padh=0):
+ # Convert normalized segments into pixel segments, shape (n,2)
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * x[:, 0] + padw # top left x
+ y[:, 1] = h * x[:, 1] + padh # top left y
+ return y
+
+
+def segment2box(segment, width=640, height=640):
+ # Convert 1 segment label to 1 box label, applying inside-image constraint, i.e. (xy1, xy2, ...) to (xyxy)
+ x, y = segment.T # segment xy
+ inside = (x >= 0) & (y >= 0) & (x <= width) & (y <= height)
+ x, y, = x[inside], y[inside]
+ return np.array([x.min(), y.min(), x.max(), y.max()]) if any(x) else np.zeros((1, 4)) # xyxy
+
+
+def segments2boxes(segments):
+ # Convert segment labels to box labels, i.e. (cls, xy1, xy2, ...) to (cls, xywh)
+ boxes = []
+ for s in segments:
+ x, y = s.T # segment xy
+ boxes.append([x.min(), y.min(), x.max(), y.max()]) # cls, xyxy
+ return xyxy2xywh(np.array(boxes)) # cls, xywh
+
+
+def resample_segments(segments, n=1000):
+ # Up-sample an (n,2) segment
+ for i, s in enumerate(segments):
+ s = np.concatenate((s, s[0:1, :]), axis=0)
+ x = np.linspace(0, len(s) - 1, n)
+ xp = np.arange(len(s))
+ segments[i] = np.concatenate([np.interp(x, xp, s[:, i]) for i in range(2)]).reshape(2, -1).T # segment xy
+ return segments
+
+
+def scale_coords(img1_shape, coords, img0_shape, ratio_pad=None):
+ # Rescale coords (xyxy) from img1_shape to img0_shape
+ if ratio_pad is None: # calculate from img0_shape
+ gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
+ pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
+ else:
+ gain = ratio_pad[0][0]
+ pad = ratio_pad[1]
+
+ coords[:, [0, 2]] -= pad[0] # x padding
+ coords[:, [1, 3]] -= pad[1] # y padding
+ coords[:, :4] /= gain
+ clip_coords(coords, img0_shape)
+ return coords
+
+
+def clip_coords(boxes, img_shape):
+ # Clip bounding xyxy bounding boxes to image shape (height, width)
+ boxes[:, 0].clamp_(0, img_shape[1]) # x1
+ boxes[:, 1].clamp_(0, img_shape[0]) # y1
+ boxes[:, 2].clamp_(0, img_shape[1]) # x2
+ boxes[:, 3].clamp_(0, img_shape[0]) # y2
+
+
+def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
+ box2 = box2.T
+
+ # Get the coordinates of bounding boxes
+ if x1y1x2y2: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ else: # transform from xywh to xyxy
+ b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
+ b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
+ b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
+ b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ iou = inter / union
+
+ if GIoU or DIoU or CIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
+ (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
+ if DIoU:
+ return iou - rho2 / c2 # DIoU
+ elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
+ with torch.no_grad():
+ alpha = v / (v - iou + (1 + eps))
+ return iou - (rho2 / c2 + v * alpha) # CIoU
+ else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ c_area = cw * ch + eps # convex area
+ return iou - (c_area - union) / c_area # GIoU
+ else:
+ return iou # IoU
+
+
+
+
+def bbox_alpha_iou(box1, box2, x1y1x2y2=False, GIoU=False, DIoU=False, CIoU=False, alpha=2, eps=1e-9):
+ # Returns tsqrt_he IoU of box1 to box2. box1 is 4, box2 is nx4
+ box2 = box2.T
+
+ # Get the coordinates of bounding boxes
+ if x1y1x2y2: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ else: # transform from xywh to xyxy
+ b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
+ b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
+ b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
+ b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ # change iou into pow(iou+eps)
+ # iou = inter / union
+ iou = torch.pow(inter/union + eps, alpha)
+ # beta = 2 * alpha
+ if GIoU or DIoU or CIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal
+ rho_x = torch.abs(b2_x1 + b2_x2 - b1_x1 - b1_x2)
+ rho_y = torch.abs(b2_y1 + b2_y2 - b1_y1 - b1_y2)
+ rho2 = ((rho_x ** 2 + rho_y ** 2) / 4) ** alpha # center distance
+ if DIoU:
+ return iou - rho2 / c2 # DIoU
+ elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
+ with torch.no_grad():
+ alpha_ciou = v / ((1 + eps) - inter / union + v)
+ # return iou - (rho2 / c2 + v * alpha_ciou) # CIoU
+ return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
+ else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ # c_area = cw * ch + eps # convex area
+ # return iou - (c_area - union) / c_area # GIoU
+ c_area = torch.max(cw * ch + eps, union) # convex area
+ return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU
+ else:
+ return iou # torch.log(iou+eps) or iou
+
+
+def box_iou(box1, box2):
+ # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ box1 (Tensor[N, 4])
+ box2 (Tensor[M, 4])
+ Returns:
+ iou (Tensor[N, M]): the NxM matrix containing the pairwise
+ IoU values for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ return inter / (area1[:, None] + area2 - inter) # iou = inter / (area1 + area2 - inter)
+
+
+def wh_iou(wh1, wh2):
+ # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
+ wh1 = wh1[:, None] # [N,1,2]
+ wh2 = wh2[None] # [1,M,2]
+ inter = torch.min(wh1, wh2).prod(2) # [N,M]
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter) # iou = inter / (area1 + area2 - inter)
+
+
+def box_giou(box1, box2):
+ """
+ Return generalized intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise generalized IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ areai = whi[:, :, 0] * whi[:, :, 1]
+
+ return iou - (areai - union) / areai
+
+
+def box_ciou(box1, box2, eps: float = 1e-7):
+ """
+ Return complete intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ eps (float, optional): small number to prevent division by zero. Default: 1e-7
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise complete IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ diagonal_distance_squared = (whi[:, :, 0] ** 2) + (whi[:, :, 1] ** 2) + eps
+
+ # centers of boxes
+ x_p = (box1[:, None, 0] + box1[:, None, 2]) / 2
+ y_p = (box1[:, None, 1] + box1[:, None, 3]) / 2
+ x_g = (box2[:, 0] + box2[:, 2]) / 2
+ y_g = (box2[:, 1] + box2[:, 3]) / 2
+ # The distance between boxes' centers squared.
+ centers_distance_squared = (x_p - x_g) ** 2 + (y_p - y_g) ** 2
+
+ w_pred = box1[:, None, 2] - box1[:, None, 0]
+ h_pred = box1[:, None, 3] - box1[:, None, 1]
+
+ w_gt = box2[:, 2] - box2[:, 0]
+ h_gt = box2[:, 3] - box2[:, 1]
+
+ v = (4 / (torch.pi ** 2)) * torch.pow((torch.atan(w_gt / h_gt) - torch.atan(w_pred / h_pred)), 2)
+ with torch.no_grad():
+ alpha = v / (1 - iou + v + eps)
+ return iou - (centers_distance_squared / diagonal_distance_squared) - alpha * v
+
+
+def box_diou(box1, box2, eps: float = 1e-7):
+ """
+ Return distance intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ eps (float, optional): small number to prevent division by zero. Default: 1e-7
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise distance IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ diagonal_distance_squared = (whi[:, :, 0] ** 2) + (whi[:, :, 1] ** 2) + eps
+
+ # centers of boxes
+ x_p = (box1[:, None, 0] + box1[:, None, 2]) / 2
+ y_p = (box1[:, None, 1] + box1[:, None, 3]) / 2
+ x_g = (box2[:, 0] + box2[:, 2]) / 2
+ y_g = (box2[:, 1] + box2[:, 3]) / 2
+ # The distance between boxes' centers squared.
+ centers_distance_squared = (x_p - x_g) ** 2 + (y_p - y_g) ** 2
+
+ # The distance IoU is the IoU penalized by a normalized
+ # distance between boxes' centers squared.
+ return iou - (centers_distance_squared / diagonal_distance_squared)
+
+
+def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
+ labels=()):
+ """Runs Non-Maximum Suppression (NMS) on inference results
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+
+ nc = prediction.shape[2] - 5 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Settings
+ min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
+ max_det = 300 # maximum number of detections per image
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 10.0 # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0, 6), device=prediction.device)] * prediction.shape[0]
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ l = labels[xi]
+ v = torch.zeros((len(l), nc + 5), device=x.device)
+ v[:, :4] = l[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ if nc == 1:
+ x[:, 5:] = x[:, 4:5] # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ print(f'WARNING: NMS time limit {time_limit}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def non_max_suppression_kpt(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
+ labels=(), kpt_label=False, nc=None, nkpt=None):
+ """Runs Non-Maximum Suppression (NMS) on inference results
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+ if nc is None:
+ nc = prediction.shape[2] - 5 if not kpt_label else prediction.shape[2] - 56 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Settings
+ min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
+ max_det = 300 # maximum number of detections per image
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 10.0 # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0,6), device=prediction.device)] * prediction.shape[0]
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ l = labels[xi]
+ v = torch.zeros((len(l), nc + 5), device=x.device)
+ v[:, :4] = l[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ x[:, 5:5+nc] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ if not kpt_label:
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+ else:
+ kpts = x[:, 6:]
+ conf, j = x[:, 5:6].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float(), kpts), 1)[conf.view(-1) > conf_thres]
+
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ print(f'WARNING: NMS time limit {time_limit}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def strip_optimizer(f='best.pt', s=''): # from utils.general import *; strip_optimizer()
+ # Strip optimizer from 'f' to finalize training, optionally save as 's'
+ x = torch.load(f, map_location=torch.device('cpu'))
+ if x.get('ema'):
+ x['model'] = x['ema'] # replace model with ema
+ for k in 'optimizer', 'training_results', 'wandb_id', 'ema', 'updates': # keys
+ x[k] = None
+ x['epoch'] = -1
+ x['model'].half() # to FP16
+ for p in x['model'].parameters():
+ p.requires_grad = False
+ torch.save(x, s or f)
+ mb = os.path.getsize(s or f) / 1E6 # filesize
+ print(f"Optimizer stripped from {f},{(' saved as %s,' % s) if s else ''} {mb:.1f}MB")
+
+
+def print_mutation(hyp, results, yaml_file='hyp_evolved.yaml', bucket=''):
+ # Print mutation results to evolve.txt (for use with train.py --evolve)
+ a = '%10s' * len(hyp) % tuple(hyp.keys()) # hyperparam keys
+ b = '%10.3g' * len(hyp) % tuple(hyp.values()) # hyperparam values
+ c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
+ print('\n%s\n%s\nEvolved fitness: %s\n' % (a, b, c))
+
+ if bucket:
+ url = 'gs://%s/evolve.txt' % bucket
+ if gsutil_getsize(url) > (os.path.getsize('evolve.txt') if os.path.exists('evolve.txt') else 0):
+ os.system('gsutil cp %s .' % url) # download evolve.txt if larger than local
+
+ with open('evolve.txt', 'a') as f: # append result
+ f.write(c + b + '\n')
+ x = np.unique(np.loadtxt('evolve.txt', ndmin=2), axis=0) # load unique rows
+ x = x[np.argsort(-fitness(x))] # sort
+ np.savetxt('evolve.txt', x, '%10.3g') # save sort by fitness
+
+ # Save yaml
+ for i, k in enumerate(hyp.keys()):
+ hyp[k] = float(x[0, i + 7])
+ with open(yaml_file, 'w') as f:
+ results = tuple(x[0, :7])
+ c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
+ f.write('# Hyperparameter Evolution Results\n# Generations: %g\n# Metrics: ' % len(x) + c + '\n\n')
+ yaml.dump(hyp, f, sort_keys=False)
+
+ if bucket:
+ os.system('gsutil cp evolve.txt %s gs://%s' % (yaml_file, bucket)) # upload
+
+
+def apply_classifier(x, model, img, im0):
+ # applies a second stage classifier to yolo outputs
+ im0 = [im0] if isinstance(im0, np.ndarray) else im0
+ for i, d in enumerate(x): # per image
+ if d is not None and len(d):
+ d = d.clone()
+
+ # Reshape and pad cutouts
+ b = xyxy2xywh(d[:, :4]) # boxes
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # rectangle to square
+ b[:, 2:] = b[:, 2:] * 1.3 + 30 # pad
+ d[:, :4] = xywh2xyxy(b).long()
+
+ # Rescale boxes from img_size to im0 size
+ scale_coords(img.shape[2:], d[:, :4], im0[i].shape)
+
+ # Classes
+ pred_cls1 = d[:, 5].long()
+ ims = []
+ for j, a in enumerate(d): # per item
+ cutout = im0[i][int(a[1]):int(a[3]), int(a[0]):int(a[2])]
+ im = cv2.resize(cutout, (224, 224)) # BGR
+ # cv2.imwrite('test%i.jpg' % j, cutout)
+
+ im = im[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ im = np.ascontiguousarray(im, dtype=np.float32) # uint8 to float32
+ im /= 255.0 # 0 - 255 to 0.0 - 1.0
+ ims.append(im)
+
+ pred_cls2 = model(torch.Tensor(ims).to(d.device)).argmax(1) # classifier prediction
+ x[i] = x[i][pred_cls1 == pred_cls2] # retain matching class detections
+
+ return x
+
+
+def increment_path(path, exist_ok=True, sep=''):
+ # Increment path, i.e. runs/exp --> runs/exp{sep}0, runs/exp{sep}1 etc.
+ path = Path(path) # os-agnostic
+ if (path.exists() and exist_ok) or (not path.exists()):
+ return str(path)
+ else:
+ dirs = glob.glob(f"{path}{sep}*") # similar paths
+ matches = [re.search(rf"%s{sep}(\d+)" % path.stem, d) for d in dirs]
+ i = [int(m.groups()[0]) for m in matches if m] # indices
+ n = max(i) + 1 if i else 2 # increment number
+ return f"{path}{sep}{n}" # update path
diff --git a/oneAPI_ODAV_APP/utils/google_app_engine/Dockerfile b/oneAPI_ODAV_APP/utils/google_app_engine/Dockerfile
new file mode 100644
index 000000000..8d6040f26
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/google_app_engine/Dockerfile
@@ -0,0 +1,26 @@
+FROM gcr.io/google-appengine/python
+
+
+# Create a virtualenv for dependencies. This isolates these packages from
+# system-level packages.
+# Use -p python3 or -p python3.7 to select python version. Default is version 2.
+RUN virtualenv /env -p python3
+
+# Setting these environment variables are the same as running
+# source /env/bin/activate.
+ENV VIRTUAL_ENV /env
+ENV PATH /env/bin:$PATH
+
+RUN apt-get update && apt-get install -y python-opencv
+
+# Copy the application's requirements.txt and run pip to install all
+# dependencies into the virtualenv.
+ADD requirements.txt /app/requirements.txt
+RUN pip install -r /app/requirements.txt
+
+# Add the application source code.
+ADD . /app
+
+# Run a WSGI server to serve the application. gunicorn must be declared as
+# a dependency in requirements.txt.
+CMD gunicorn -b :$PORT main:app
diff --git a/oneAPI_ODAV_APP/utils/google_app_engine/additional_requirements.txt b/oneAPI_ODAV_APP/utils/google_app_engine/additional_requirements.txt
new file mode 100644
index 000000000..a40b65907
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/google_app_engine/additional_requirements.txt
@@ -0,0 +1,5 @@
+# add these requirements in your app on top of the existing ones
+pip==18.1
+Flask==1.0.2
+gunicorn==19.9.0
+
diff --git a/oneAPI_ODAV_APP/utils/google_app_engine/app.yaml b/oneAPI_ODAV_APP/utils/google_app_engine/app.yaml
new file mode 100644
index 000000000..61bfcdfe7
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/google_app_engine/app.yaml
@@ -0,0 +1,14 @@
+runtime: custom
+env: flex
+
+service: yolorapp
+
+liveness_check:
+ initial_delay_sec: 600
+
+manual_scaling:
+ instances: 1
+resources:
+ cpu: 1
+ memory_gb: 4
+ disk_size_gb: 20
diff --git a/oneAPI_ODAV_APP/utils/google_utils.py b/oneAPI_ODAV_APP/utils/google_utils.py
new file mode 100644
index 000000000..b2a818336
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/google_utils.py
@@ -0,0 +1,124 @@
+# Google utils: https://cloud.google.com/storage/docs/reference/libraries
+
+import os
+import platform
+import subprocess
+import time
+from pathlib import Path
+
+import requests
+import torch
+
+
+
+def gsutil_getsize(url=''):
+ # gs://bucket/file size https://cloud.google.com/storage/docs/gsutil/commands/du
+ s = subprocess.check_output(f'gsutil du {url}', shell=True).decode('utf-8')
+ return eval(s.split(' ')[0]) if len(s) else 0 # bytes
+
+
+def attempt_download(file, repo='WongKinYiu/yolov7'):
+ # Attempt file download if does not exist
+ file = Path(str(file).strip().replace("'", '').lower())
+
+ if not file.exists():
+ try:
+ response = requests.get(f'https://api.github.com/repos/{repo}/releases/latest').json() # github api
+ assets = [x['name'] for x in response['assets']] # release assets
+ tag = response['tag_name'] # i.e. 'v1.0'
+ except: # fallback plan
+ assets = ['yolov7.pt', 'yolov7-tiny.pt', 'yolov7x.pt', 'yolov7-d6.pt', 'yolov7-e6.pt',
+ 'yolov7-e6e.pt', 'yolov7-w6.pt']
+ tag = subprocess.check_output('git tag', shell=True).decode().split()[-1]
+
+ name = file.name
+ if name in assets:
+ msg = f'{file} missing, try downloading from https://github.com/{repo}/releases/'
+ redundant = False # second download option
+ try: # GitHub
+ url = f'https://github.com/{repo}/releases/download/{tag}/{name}'
+ print(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, file)
+ assert file.exists() and file.stat().st_size > 1E6 # check
+ except Exception as e: # GCP
+ print(f'Download error: {e}')
+ assert redundant, 'No secondary mirror'
+ url = f'https://storage.googleapis.com/{repo}/ckpt/{name}'
+ print(f'Downloading {url} to {file}...')
+ os.system(f'curl -L {url} -o {file}') # torch.hub.download_url_to_file(url, weights)
+ finally:
+ if not file.exists() or file.stat().st_size < 1E6: # check
+ file.unlink(missing_ok=True) # remove partial downloads
+ print(f'ERROR: Download failure: {msg}')
+ print('')
+ return
+
+
+def gdrive_download(id='', file='tmp.zip'):
+ # Downloads a file from Google Drive. from yolov7.utils.google_utils import *; gdrive_download()
+ t = time.time()
+ file = Path(file)
+ cookie = Path('cookie') # gdrive cookie
+ print(f'Downloading https://drive.google.com/uc?export=download&id={id} as {file}... ', end='')
+ file.unlink(missing_ok=True) # remove existing file
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Attempt file download
+ out = "NUL" if platform.system() == "Windows" else "/dev/null"
+ os.system(f'curl -c ./cookie -s -L "drive.google.com/uc?export=download&id={id}" > {out}')
+ if os.path.exists('cookie'): # large file
+ s = f'curl -Lb ./cookie "drive.google.com/uc?export=download&confirm={get_token()}&id={id}" -o {file}'
+ else: # small file
+ s = f'curl -s -L -o {file} "drive.google.com/uc?export=download&id={id}"'
+ r = os.system(s) # execute, capture return
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Error check
+ if r != 0:
+ file.unlink(missing_ok=True) # remove partial
+ print('Download error ') # raise Exception('Download error')
+ return r
+
+ # Unzip if archive
+ if file.suffix == '.zip':
+ print('unzipping... ', end='')
+ os.system(f'unzip -q {file}') # unzip
+ file.unlink() # remove zip to free space
+
+ print(f'Done ({time.time() - t:.1f}s)')
+ return r
+
+
+def get_token(cookie="./cookie"):
+ with open(cookie) as f:
+ for line in f:
+ if "download" in line:
+ return line.split()[-1]
+ return ""
+
+# def upload_blob(bucket_name, source_file_name, destination_blob_name):
+# # Uploads a file to a bucket
+# # https://cloud.google.com/storage/docs/uploading-objects#storage-upload-object-python
+#
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(destination_blob_name)
+#
+# blob.upload_from_filename(source_file_name)
+#
+# print('File {} uploaded to {}.'.format(
+# source_file_name,
+# destination_blob_name))
+#
+#
+# def download_blob(bucket_name, source_blob_name, destination_file_name):
+# # Uploads a blob from a bucket
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(source_blob_name)
+#
+# blob.download_to_filename(destination_file_name)
+#
+# print('Blob {} downloaded to {}.'.format(
+# source_blob_name,
+# destination_file_name))
diff --git a/oneAPI_ODAV_APP/utils/loss.py b/oneAPI_ODAV_APP/utils/loss.py
new file mode 100644
index 000000000..8468e3dbb
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/loss.py
@@ -0,0 +1,1698 @@
+# Loss functions
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+from utils.general import bbox_iou, bbox_alpha_iou, box_iou, box_giou, box_diou, box_ciou, xywh2xyxy
+from utils.torch_utils import is_parallel
+
+
+
+def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
+ # return positive, negative label smoothing BCE targets
+ return 1.0 - 0.5 * eps, 0.5 * eps
+
+
+class BCEBlurWithLogitsLoss(nn.Module):
+ # BCEwithLogitLoss() with reduced missing label effects.
+ def __init__(self, alpha=0.05):
+ super(BCEBlurWithLogitsLoss, self).__init__()
+ self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
+ self.alpha = alpha
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ pred = torch.sigmoid(pred) # prob from logits
+ dx = pred - true # reduce only missing label effects
+ # dx = (pred - true).abs() # reduce missing label and false label effects
+ alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
+ loss *= alpha_factor
+ return loss.mean()
+
+
+class SigmoidBin(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, bin_count=10, min=0.0, max=1.0, reg_scale = 2.0, use_loss_regression=True, use_fw_regression=True, BCE_weight=1.0, smooth_eps=0.0):
+ super(SigmoidBin, self).__init__()
+
+ self.bin_count = bin_count
+ self.length = bin_count + 1
+ self.min = min
+ self.max = max
+ self.scale = float(max - min)
+ self.shift = self.scale / 2.0
+
+ self.use_loss_regression = use_loss_regression
+ self.use_fw_regression = use_fw_regression
+ self.reg_scale = reg_scale
+ self.BCE_weight = BCE_weight
+
+ start = min + (self.scale/2.0) / self.bin_count
+ end = max - (self.scale/2.0) / self.bin_count
+ step = self.scale / self.bin_count
+ self.step = step
+ #print(f" start = {start}, end = {end}, step = {step} ")
+
+ bins = torch.range(start, end + 0.0001, step).float()
+ self.register_buffer('bins', bins)
+
+
+ self.cp = 1.0 - 0.5 * smooth_eps
+ self.cn = 0.5 * smooth_eps
+
+ self.BCEbins = nn.BCEWithLogitsLoss(pos_weight=torch.Tensor([BCE_weight]))
+ self.MSELoss = nn.MSELoss()
+
+ def get_length(self):
+ return self.length
+
+ def forward(self, pred):
+ assert pred.shape[-1] == self.length, 'pred.shape[-1]=%d is not equal to self.length=%d' % (pred.shape[-1], self.length)
+
+ pred_reg = (pred[..., 0] * self.reg_scale - self.reg_scale/2.0) * self.step
+ pred_bin = pred[..., 1:(1+self.bin_count)]
+
+ _, bin_idx = torch.max(pred_bin, dim=-1)
+ bin_bias = self.bins[bin_idx]
+
+ if self.use_fw_regression:
+ result = pred_reg + bin_bias
+ else:
+ result = bin_bias
+ result = result.clamp(min=self.min, max=self.max)
+
+ return result
+
+
+ def training_loss(self, pred, target):
+ assert pred.shape[-1] == self.length, 'pred.shape[-1]=%d is not equal to self.length=%d' % (pred.shape[-1], self.length)
+ assert pred.shape[0] == target.shape[0], 'pred.shape=%d is not equal to the target.shape=%d' % (pred.shape[0], target.shape[0])
+ device = pred.device
+
+ pred_reg = (pred[..., 0].sigmoid() * self.reg_scale - self.reg_scale/2.0) * self.step
+ pred_bin = pred[..., 1:(1+self.bin_count)]
+
+ diff_bin_target = torch.abs(target[..., None] - self.bins)
+ _, bin_idx = torch.min(diff_bin_target, dim=-1)
+
+ bin_bias = self.bins[bin_idx]
+ bin_bias.requires_grad = False
+ result = pred_reg + bin_bias
+
+ target_bins = torch.full_like(pred_bin, self.cn, device=device) # targets
+ n = pred.shape[0]
+ target_bins[range(n), bin_idx] = self.cp
+
+ loss_bin = self.BCEbins(pred_bin, target_bins) # BCE
+
+ if self.use_loss_regression:
+ loss_regression = self.MSELoss(result, target) # MSE
+ loss = loss_bin + loss_regression
+ else:
+ loss = loss_bin
+
+ out_result = result.clamp(min=self.min, max=self.max)
+
+ return loss, out_result
+
+
+class FocalLoss(nn.Module):
+ # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(FocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ # p_t = torch.exp(-loss)
+ # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
+
+ # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = (1.0 - p_t) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class QFocalLoss(nn.Module):
+ # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(QFocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = torch.abs(true - pred_prob) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+class RankSort(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, delta_RS=0.50, eps=1e-10):
+
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets > 0.)
+ fg_logits = logits[fg_labels]
+ fg_targets = targets[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta_RS
+ relevant_bg_labels=((targets==0) & (logits>=threshold_logit))
+
+ relevant_bg_logits = logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ sorting_error=torch.zeros(fg_num).cuda()
+ ranking_error=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ # Difference Transforms (x_ij)
+ fg_relations=fg_logits-fg_logits[ii]
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+
+ if delta_RS > 0:
+ fg_relations=torch.clamp(fg_relations/(2*delta_RS)+0.5,min=0,max=1)
+ bg_relations=torch.clamp(bg_relations/(2*delta_RS)+0.5,min=0,max=1)
+ else:
+ fg_relations = (fg_relations >= 0).float()
+ bg_relations = (bg_relations >= 0).float()
+
+ # Rank of ii among pos and false positive number (bg with larger scores)
+ rank_pos=torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+
+ # Rank of ii among all examples
+ rank=rank_pos+FP_num
+
+ # Ranking error of example ii. target_ranking_error is always 0. (Eq. 7)
+ ranking_error[ii]=FP_num/rank
+
+ # Current sorting error of example ii. (Eq. 7)
+ current_sorting_error = torch.sum(fg_relations*(1-fg_targets))/rank_pos
+
+ #Find examples in the target sorted order for example ii
+ iou_relations = (fg_targets >= fg_targets[ii])
+ target_sorted_order = iou_relations * fg_relations
+
+ #The rank of ii among positives in sorted order
+ rank_pos_target = torch.sum(target_sorted_order)
+
+ #Compute target sorting error. (Eq. 8)
+ #Since target ranking error is 0, this is also total target error
+ target_sorting_error= torch.sum(target_sorted_order*(1-fg_targets))/rank_pos_target
+
+ #Compute sorting error on example ii
+ sorting_error[ii] = current_sorting_error - target_sorting_error
+
+ #Identity Update for Ranking Error
+ if FP_num > eps:
+ #For ii the update is the ranking error
+ fg_grad[ii] -= ranking_error[ii]
+ #For negatives, distribute error via ranking pmf (i.e. bg_relations/FP_num)
+ relevant_bg_grad += (bg_relations*(ranking_error[ii]/FP_num))
+
+ #Find the positives that are misranked (the cause of the error)
+ #These are the ones with smaller IoU but larger logits
+ missorted_examples = (~ iou_relations) * fg_relations
+
+ #Denominotor of sorting pmf
+ sorting_pmf_denom = torch.sum(missorted_examples)
+
+ #Identity Update for Sorting Error
+ if sorting_pmf_denom > eps:
+ #For ii the update is the sorting error
+ fg_grad[ii] -= sorting_error[ii]
+ #For positives, distribute error via sorting pmf (i.e. missorted_examples/sorting_pmf_denom)
+ fg_grad += (missorted_examples*(sorting_error[ii]/sorting_pmf_denom))
+
+ #Normalize gradients by number of positives
+ classification_grads[fg_labels]= (fg_grad/fg_num)
+ classification_grads[relevant_bg_labels]= (relevant_bg_grad/fg_num)
+
+ ctx.save_for_backward(classification_grads)
+
+ return ranking_error.mean(), sorting_error.mean()
+
+ @staticmethod
+ def backward(ctx, out_grad1, out_grad2):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None, None
+
+class aLRPLoss(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, regression_losses, delta=1., eps=1e-5):
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets == 1)
+ fg_logits = logits[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta
+
+ #Get valid bg logits
+ relevant_bg_labels=((targets==0)&(logits>=threshold_logit))
+ relevant_bg_logits=logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ rank=torch.zeros(fg_num).cuda()
+ prec=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ max_prec=0
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ #x_ij s as score differences with fgs
+ fg_relations=fg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with fgs
+ fg_relations=torch.clamp(fg_relations/(2*delta)+0.5,min=0,max=1)
+ #Discard i=j in the summation in rank_pos
+ fg_relations[ii]=0
+
+ #x_ij s as score differences with bgs
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with bgs
+ bg_relations=torch.clamp(bg_relations/(2*delta)+0.5,min=0,max=1)
+
+ #Compute the rank of the example within fgs and number of bgs with larger scores
+ rank_pos=1+torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+ #Store the total since it is normalizer also for aLRP Regression error
+ rank[ii]=rank_pos+FP_num
+
+ #Compute precision for this example to compute classification loss
+ prec[ii]=rank_pos/rank[ii]
+ #For stability, set eps to a infinitesmall value (e.g. 1e-6), then compute grads
+ if FP_num > eps:
+ fg_grad[ii] = -(torch.sum(fg_relations*regression_losses)+FP_num)/rank[ii]
+ relevant_bg_grad += (bg_relations*(-fg_grad[ii]/FP_num))
+
+ #aLRP with grad formulation fg gradient
+ classification_grads[fg_labels]= fg_grad
+ #aLRP with grad formulation bg gradient
+ classification_grads[relevant_bg_labels]= relevant_bg_grad
+
+ classification_grads /= (fg_num)
+
+ cls_loss=1-prec.mean()
+ ctx.save_for_backward(classification_grads)
+
+ return cls_loss, rank, order
+
+ @staticmethod
+ def backward(ctx, out_grad1, out_grad2, out_grad3):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None, None, None
+
+
+class APLoss(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, delta=1.):
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets == 1)
+ fg_logits = logits[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta
+
+ #Get valid bg logits
+ relevant_bg_labels=((targets==0)&(logits>=threshold_logit))
+ relevant_bg_logits=logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ rank=torch.zeros(fg_num).cuda()
+ prec=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ max_prec=0
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ #x_ij s as score differences with fgs
+ fg_relations=fg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with fgs
+ fg_relations=torch.clamp(fg_relations/(2*delta)+0.5,min=0,max=1)
+ #Discard i=j in the summation in rank_pos
+ fg_relations[ii]=0
+
+ #x_ij s as score differences with bgs
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with bgs
+ bg_relations=torch.clamp(bg_relations/(2*delta)+0.5,min=0,max=1)
+
+ #Compute the rank of the example within fgs and number of bgs with larger scores
+ rank_pos=1+torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+ #Store the total since it is normalizer also for aLRP Regression error
+ rank[ii]=rank_pos+FP_num
+
+ #Compute precision for this example
+ current_prec=rank_pos/rank[ii]
+
+ #Compute interpolated AP and store gradients for relevant bg examples
+ if (max_prec<=current_prec):
+ max_prec=current_prec
+ relevant_bg_grad += (bg_relations/rank[ii])
+ else:
+ relevant_bg_grad += (bg_relations/rank[ii])*(((1-max_prec)/(1-current_prec)))
+
+ #Store fg gradients
+ fg_grad[ii]=-(1-max_prec)
+ prec[ii]=max_prec
+
+ #aLRP with grad formulation fg gradient
+ classification_grads[fg_labels]= fg_grad
+ #aLRP with grad formulation bg gradient
+ classification_grads[relevant_bg_labels]= relevant_bg_grad
+
+ classification_grads /= fg_num
+
+ cls_loss=1-prec.mean()
+ ctx.save_for_backward(classification_grads)
+
+ return cls_loss
+
+ @staticmethod
+ def backward(ctx, out_grad1):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLoss, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ #self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.1, .05]) # P3-P7
+ #self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.5, 0.4, .1]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), tcls[i]] = self.cp
+ #t[t==self.cp] = iou.detach().clamp(0).type(t.dtype)
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch = [], [], [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+
+ return tcls, tbox, indices, anch
+
+
+class ComputeLossOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p, targets, imgs)
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p]
+
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ #pxy = ps[:, :2].sigmoid() * 3. - 1.
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ #indices, anch = self.find_positive(p, targets)
+ indices, anch = self.find_3_positive(p, targets)
+ #indices, anch = self.find_4_positive(p, targets)
+ #indices, anch = self.find_5_positive(p, targets)
+ #indices, anch = self.find_9_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(10, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+
+class ComputeLossBinOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossBinOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+ #MSEangle = nn.MSELoss().to(device)
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride', 'bin_count':
+ setattr(self, k, getattr(det, k))
+
+ #xy_bin_sigmoid = SigmoidBin(bin_count=11, min=-0.5, max=1.5, use_loss_regression=False).to(device)
+ wh_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0, use_loss_regression=False).to(device)
+ #angle_bin_sigmoid = SigmoidBin(bin_count=31, min=-1.1, max=1.1, use_loss_regression=False).to(device)
+ self.wh_bin_sigmoid = wh_bin_sigmoid
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p, targets, imgs)
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p]
+
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ obj_idx = self.wh_bin_sigmoid.get_length()*2 + 2 # x,y, w-bce, h-bce # xy_bin_sigmoid.get_length()*2
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+
+ #pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ ##pxy = ps[:, :2].sigmoid() * 3. - 1.
+ #pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ #pbox = torch.cat((pxy, pwh), 1) # predicted box
+
+ #x_loss, px = xy_bin_sigmoid.training_loss(ps[..., 0:12], tbox[i][..., 0])
+ #y_loss, py = xy_bin_sigmoid.training_loss(ps[..., 12:24], tbox[i][..., 1])
+ w_loss, pw = self.wh_bin_sigmoid.training_loss(ps[..., 2:(3+self.bin_count)], selected_tbox[..., 2] / anchors[i][..., 0])
+ h_loss, ph = self.wh_bin_sigmoid.training_loss(ps[..., (3+self.bin_count):obj_idx], selected_tbox[..., 3] / anchors[i][..., 1])
+
+ pw *= anchors[i][..., 0]
+ ph *= anchors[i][..., 1]
+
+ px = ps[:, 0].sigmoid() * 2. - 0.5
+ py = ps[:, 1].sigmoid() * 2. - 0.5
+
+ lbox += w_loss + h_loss # + x_loss + y_loss
+
+ #print(f"\n px = {px.shape}, py = {py.shape}, pw = {pw.shape}, ph = {ph.shape} \n")
+
+ pbox = torch.cat((px.unsqueeze(1), py.unsqueeze(1), pw.unsqueeze(1), ph.unsqueeze(1)), 1).to(device) # predicted box
+
+
+
+
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, (1+obj_idx):], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, (1+obj_idx):], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., obj_idx], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ #indices, anch = self.find_positive(p, targets)
+ indices, anch = self.find_3_positive(p, targets)
+ #indices, anch = self.find_4_positive(p, targets)
+ #indices, anch = self.find_5_positive(p, targets)
+ #indices, anch = self.find_9_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ obj_idx = self.wh_bin_sigmoid.get_length()*2 + 2
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, obj_idx:(obj_idx+1)])
+ p_cls.append(fg_pred[:, (obj_idx+1):])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pw = self.wh_bin_sigmoid.forward(fg_pred[..., 2:(3+self.bin_count)].sigmoid()) * anch[i][idx][:, 0] * self.stride[i]
+ ph = self.wh_bin_sigmoid.forward(fg_pred[..., (3+self.bin_count):obj_idx].sigmoid()) * anch[i][idx][:, 1] * self.stride[i]
+
+ pxywh = torch.cat([pxy, pw.unsqueeze(1), ph.unsqueeze(1)], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(10, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+
+class ComputeLossAuxOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossAuxOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs_aux, as_aux_, gjs_aux, gis_aux, targets_aux, anchors_aux = self.build_targets2(p[:self.nl], targets, imgs)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p[:self.nl], targets, imgs)
+ pre_gen_gains_aux = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p[:self.nl]]
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p[:self.nl]]
+
+
+ # Losses
+ for i in range(self.nl): # layer index, layer predictions
+ pi = p[i]
+ pi_aux = p[i+self.nl]
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ b_aux, a_aux, gj_aux, gi_aux = bs_aux[i], as_aux_[i], gjs_aux[i], gis_aux[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+ tobj_aux = torch.zeros_like(pi_aux[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ n_aux = b_aux.shape[0] # number of targets
+ if n_aux:
+ ps_aux = pi_aux[b_aux, a_aux, gj_aux, gi_aux] # prediction subset corresponding to targets
+ grid_aux = torch.stack([gi_aux, gj_aux], dim=1)
+ pxy_aux = ps_aux[:, :2].sigmoid() * 2. - 0.5
+ #pxy_aux = ps_aux[:, :2].sigmoid() * 3. - 1.
+ pwh_aux = (ps_aux[:, 2:4].sigmoid() * 2) ** 2 * anchors_aux[i]
+ pbox_aux = torch.cat((pxy_aux, pwh_aux), 1) # predicted box
+ selected_tbox_aux = targets_aux[i][:, 2:6] * pre_gen_gains_aux[i]
+ selected_tbox_aux[:, :2] -= grid_aux
+ iou_aux = bbox_iou(pbox_aux.T, selected_tbox_aux, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += 0.25 * (1.0 - iou_aux).mean() # iou loss
+
+ # Objectness
+ tobj_aux[b_aux, a_aux, gj_aux, gi_aux] = (1.0 - self.gr) + self.gr * iou_aux.detach().clamp(0).type(tobj_aux.dtype) # iou ratio
+
+ # Classification
+ selected_tcls_aux = targets_aux[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t_aux = torch.full_like(ps_aux[:, 5:], self.cn, device=device) # targets
+ t_aux[range(n_aux), selected_tcls_aux] = self.cp
+ lcls += 0.25 * self.BCEcls(ps_aux[:, 5:], t_aux) # BCE
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ obji_aux = self.BCEobj(pi_aux[..., 4], tobj_aux)
+ lobj += obji * self.balance[i] + 0.25 * obji_aux * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ indices, anch = self.find_3_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(20, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def build_targets2(self, p, targets, imgs):
+
+ indices, anch = self.find_5_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(20, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_5_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 1.0 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
diff --git a/oneAPI_ODAV_APP/utils/metrics.py b/oneAPI_ODAV_APP/utils/metrics.py
new file mode 100644
index 000000000..180e33e3b
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/metrics.py
@@ -0,0 +1,228 @@
+# Model validation metrics
+
+from pathlib import Path
+
+import matplotlib.pyplot as plt
+import numpy as np
+import torch
+
+from . import general
+
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
+ return (x[:, :4] * w).sum(1)
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, v5_metric=False, plot=False, save_dir='.', names=()):
+ """ Compute the average precision, given the recall and precision curves.
+ Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
+ # Arguments
+ tp: True positives (nparray, nx1 or nx10).
+ conf: Objectness value from 0-1 (nparray).
+ pred_cls: Predicted object classes (nparray).
+ target_cls: True object classes (nparray).
+ plot: Plot precision-recall curve at mAP@0.5
+ save_dir: Plot save directory
+ # Returns
+ The average precision as computed in py-faster-rcnn.
+ """
+
+ # Sort by objectness
+ i = np.argsort(-conf)
+ tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
+
+ # Find unique classes
+ unique_classes = np.unique(target_cls)
+ nc = unique_classes.shape[0] # number of classes, number of detections
+
+ # Create Precision-Recall curve and compute AP for each class
+ px, py = np.linspace(0, 1, 1000), [] # for plotting
+ ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
+ for ci, c in enumerate(unique_classes):
+ i = pred_cls == c
+ n_l = (target_cls == c).sum() # number of labels
+ n_p = i.sum() # number of predictions
+
+ if n_p == 0 or n_l == 0:
+ continue
+ else:
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + 1e-16) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j], v5_metric=v5_metric)
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+
+ # Compute F1 (harmonic mean of precision and recall)
+ f1 = 2 * p * r / (p + r + 1e-16)
+ if plot:
+ plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
+
+ i = f1.mean(0).argmax() # max F1 index
+ return p[:, i], r[:, i], ap, f1[:, i], unique_classes.astype('int32')
+
+
+def compute_ap(recall, precision, v5_metric=False):
+ """ Compute the average precision, given the recall and precision curves
+ # Arguments
+ recall: The recall curve (list)
+ precision: The precision curve (list)
+ v5_metric: Assume maximum recall to be 1.0, as in YOLOv5, MMDetetion etc.
+ # Returns
+ Average precision, precision curve, recall curve
+ """
+
+ # Append sentinel values to beginning and end
+ if v5_metric: # New YOLOv5 metric, same as MMDetection and Detectron2 repositories
+ mrec = np.concatenate(([0.], recall, [1.0]))
+ else: # Old YOLOv5 metric, i.e. default YOLOv7 metric
+ mrec = np.concatenate(([0.], recall, [recall[-1] + 0.01]))
+ mpre = np.concatenate(([1.], precision, [0.]))
+
+ # Compute the precision envelope
+ mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
+
+ # Integrate area under curve
+ method = 'interp' # methods: 'continuous', 'interp'
+ if method == 'interp':
+ x = np.linspace(0, 1, 101) # 101-point interp (COCO)
+ ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
+ else: # 'continuous'
+ i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
+ ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
+
+ return ap, mpre, mrec
+
+
+class ConfusionMatrix:
+ # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
+ def __init__(self, nc, conf=0.25, iou_thres=0.45):
+ self.matrix = np.zeros((nc + 1, nc + 1))
+ self.nc = nc # number of classes
+ self.conf = conf
+ self.iou_thres = iou_thres
+
+ def process_batch(self, detections, labels):
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ None, updates confusion matrix accordingly
+ """
+ detections = detections[detections[:, 4] > self.conf]
+ gt_classes = labels[:, 0].int()
+ detection_classes = detections[:, 5].int()
+ iou = general.box_iou(labels[:, 1:], detections[:, :4])
+
+ x = torch.where(iou > self.iou_thres)
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ else:
+ matches = np.zeros((0, 3))
+
+ n = matches.shape[0] > 0
+ m0, m1, _ = matches.transpose().astype(np.int16)
+ for i, gc in enumerate(gt_classes):
+ j = m0 == i
+ if n and sum(j) == 1:
+ self.matrix[gc, detection_classes[m1[j]]] += 1 # correct
+ else:
+ self.matrix[self.nc, gc] += 1 # background FP
+
+ if n:
+ for i, dc in enumerate(detection_classes):
+ if not any(m1 == i):
+ self.matrix[dc, self.nc] += 1 # background FN
+
+ def matrix(self):
+ return self.matrix
+
+ def plot(self, save_dir='', names=()):
+ try:
+ import seaborn as sn
+
+ array = self.matrix / (self.matrix.sum(0).reshape(1, self.nc + 1) + 1E-6) # normalize
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig = plt.figure(figsize=(12, 9), tight_layout=True)
+ sn.set(font_scale=1.0 if self.nc < 50 else 0.8) # for label size
+ labels = (0 < len(names) < 99) and len(names) == self.nc # apply names to ticklabels
+ sn.heatmap(array, annot=self.nc < 30, annot_kws={"size": 8}, cmap='Blues', fmt='.2f', square=True,
+ xticklabels=names + ['background FP'] if labels else "auto",
+ yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
+ fig.axes[0].set_xlabel('True')
+ fig.axes[0].set_ylabel('Predicted')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ except Exception as e:
+ pass
+
+ def print(self):
+ for i in range(self.nc + 1):
+ print(' '.join(map(str, self.matrix[i])))
+
+
+# Plots ----------------------------------------------------------------------------------------------------------------
+
+def plot_pr_curve(px, py, ap, save_dir='pr_curve.png', names=()):
+ # Precision-recall curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+ py = np.stack(py, axis=1)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py.T):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)
+ else:
+ ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)
+
+ ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())
+ ax.set_xlabel('Recall')
+ ax.set_ylabel('Precision')
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
+
+
+def plot_mc_curve(px, py, save_dir='mc_curve.png', names=(), xlabel='Confidence', ylabel='Metric'):
+ # Metric-confidence curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)
+ else:
+ ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
+
+ y = py.mean(0)
+ ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
+ ax.set_xlabel(xlabel)
+ ax.set_ylabel(ylabel)
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
diff --git a/oneAPI_ODAV_APP/utils/plots.py b/oneAPI_ODAV_APP/utils/plots.py
new file mode 100644
index 000000000..0a1c5f311
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/plots.py
@@ -0,0 +1,490 @@
+# Plotting utils
+
+import glob
+import math
+import os
+import random
+from copy import copy
+from pathlib import Path
+
+import cv2
+import matplotlib
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import seaborn as sns
+import torch
+import yaml
+from PIL import Image, ImageDraw, ImageFont
+from scipy.signal import butter, filtfilt
+
+from utils.general import xywh2xyxy, xyxy2xywh
+from utils.metrics import fitness
+
+
+# Settings
+matplotlib.rc('font', **{'size': 11})
+matplotlib.use('Agg') # for writing to files only
+
+
+def color_list():
+ # Return first 10 plt colors as (r,g,b) https://stackoverflow.com/questions/51350872/python-from-color-name-to-rgb
+ def hex2rgb(h):
+ return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))
+
+ return [hex2rgb(h) for h in matplotlib.colors.TABLEAU_COLORS.values()] # or BASE_ (8), CSS4_ (148), XKCD_ (949)
+
+
+def hist2d(x, y, n=100):
+ # 2d histogram used in labels.png and evolve.png
+ xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
+ hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
+ xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
+ yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
+ return np.log(hist[xidx, yidx])
+
+
+def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
+ # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
+ def butter_lowpass(cutoff, fs, order):
+ nyq = 0.5 * fs
+ normal_cutoff = cutoff / nyq
+ return butter(order, normal_cutoff, btype='low', analog=False)
+
+ b, a = butter_lowpass(cutoff, fs, order=order)
+ return filtfilt(b, a, data) # forward-backward filter
+
+
+def plot_one_box(x, img, color=None, label=None, line_thickness=3):
+ # Plots one bounding box on image img
+ tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
+ color = color or [random.randint(0, 255) for _ in range(3)]
+ c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
+ cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
+ if label:
+ tf = max(tl - 1, 1) # font thickness
+ t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
+ c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
+ cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
+ cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
+
+
+def plot_one_box_PIL(box, img, color=None, label=None, line_thickness=None):
+ img = Image.fromarray(img)
+ draw = ImageDraw.Draw(img)
+ line_thickness = line_thickness or max(int(min(img.size) / 200), 2)
+ draw.rectangle(box, width=line_thickness, outline=tuple(color)) # plot
+ if label:
+ fontsize = max(round(max(img.size) / 40), 12)
+ font = ImageFont.truetype("Arial.ttf", fontsize)
+ txt_width, txt_height = font.getsize(label)
+ draw.rectangle([box[0], box[1] - txt_height + 4, box[0] + txt_width, box[1]], fill=tuple(color))
+ draw.text((box[0], box[1] - txt_height + 1), label, fill=(255, 255, 255), font=font)
+ return np.asarray(img)
+
+
+def plot_wh_methods(): # from utils.plots import *; plot_wh_methods()
+ # Compares the two methods for width-height anchor multiplication
+ # https://github.com/ultralytics/yolov3/issues/168
+ x = np.arange(-4.0, 4.0, .1)
+ ya = np.exp(x)
+ yb = torch.sigmoid(torch.from_numpy(x)).numpy() * 2
+
+ fig = plt.figure(figsize=(6, 3), tight_layout=True)
+ plt.plot(x, ya, '.-', label='YOLOv3')
+ plt.plot(x, yb ** 2, '.-', label='YOLOR ^2')
+ plt.plot(x, yb ** 1.6, '.-', label='YOLOR ^1.6')
+ plt.xlim(left=-4, right=4)
+ plt.ylim(bottom=0, top=6)
+ plt.xlabel('input')
+ plt.ylabel('output')
+ plt.grid()
+ plt.legend()
+ fig.savefig('comparison.png', dpi=200)
+
+
+def output_to_target(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ for *box, conf, cls in o.cpu().numpy():
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])
+ return np.array(targets)
+
+
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=640, max_subplots=16):
+ # Plot image grid with labels
+
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+
+ # un-normalise
+ if np.max(images[0]) <= 1:
+ images *= 255
+
+ tl = 3 # line thickness
+ tf = max(tl - 1, 1) # font thickness
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+
+ # Check if we should resize
+ scale_factor = max_size / max(h, w)
+ if scale_factor < 1:
+ h = math.ceil(scale_factor * h)
+ w = math.ceil(scale_factor * w)
+
+ colors = color_list() # list of colors
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, img in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+
+ block_x = int(w * (i // ns))
+ block_y = int(h * (i % ns))
+
+ img = img.transpose(1, 2, 0)
+ if scale_factor < 1:
+ img = cv2.resize(img, (w, h))
+
+ mosaic[block_y:block_y + h, block_x:block_x + w, :] = img
+ if len(targets) > 0:
+ image_targets = targets[targets[:, 0] == i]
+ boxes = xywh2xyxy(image_targets[:, 2:6]).T
+ classes = image_targets[:, 1].astype('int')
+ labels = image_targets.shape[1] == 6 # labels if no conf column
+ conf = None if labels else image_targets[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale_factor < 1: # absolute coords need scale if image scales
+ boxes *= scale_factor
+ boxes[[0, 2]] += block_x
+ boxes[[1, 3]] += block_y
+ for j, box in enumerate(boxes.T):
+ cls = int(classes[j])
+ color = colors[cls % len(colors)]
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = '%s' % cls if labels else '%s %.1f' % (cls, conf[j])
+ plot_one_box(box, mosaic, label=label, color=color, line_thickness=tl)
+
+ # Draw image filename labels
+ if paths:
+ label = Path(paths[i]).name[:40] # trim to 40 char
+ t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
+ cv2.putText(mosaic, label, (block_x + 5, block_y + t_size[1] + 5), 0, tl / 3, [220, 220, 220], thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ # Image border
+ cv2.rectangle(mosaic, (block_x, block_y), (block_x + w, block_y + h), (255, 255, 255), thickness=3)
+
+ if fname:
+ r = min(1280. / max(h, w) / ns, 1.0) # ratio to limit image size
+ mosaic = cv2.resize(mosaic, (int(ns * w * r), int(ns * h * r)), interpolation=cv2.INTER_AREA)
+ # cv2.imwrite(fname, cv2.cvtColor(mosaic, cv2.COLOR_BGR2RGB)) # cv2 save
+ Image.fromarray(mosaic).save(fname) # PIL save
+ return mosaic
+
+
+def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):
+ # Plot LR simulating training for full epochs
+ optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
+ y = []
+ for _ in range(epochs):
+ scheduler.step()
+ y.append(optimizer.param_groups[0]['lr'])
+ plt.plot(y, '.-', label='LR')
+ plt.xlabel('epoch')
+ plt.ylabel('LR')
+ plt.grid()
+ plt.xlim(0, epochs)
+ plt.ylim(0)
+ plt.savefig(Path(save_dir) / 'LR.png', dpi=200)
+ plt.close()
+
+
+def plot_test_txt(): # from utils.plots import *; plot_test()
+ # Plot test.txt histograms
+ x = np.loadtxt('test.txt', dtype=np.float32)
+ box = xyxy2xywh(x[:, :4])
+ cx, cy = box[:, 0], box[:, 1]
+
+ fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
+ ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
+ ax.set_aspect('equal')
+ plt.savefig('hist2d.png', dpi=300)
+
+ fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
+ ax[0].hist(cx, bins=600)
+ ax[1].hist(cy, bins=600)
+ plt.savefig('hist1d.png', dpi=200)
+
+
+def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
+ # Plot targets.txt histograms
+ x = np.loadtxt('targets.txt', dtype=np.float32).T
+ s = ['x targets', 'y targets', 'width targets', 'height targets']
+ fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(4):
+ ax[i].hist(x[i], bins=100, label='%.3g +/- %.3g' % (x[i].mean(), x[i].std()))
+ ax[i].legend()
+ ax[i].set_title(s[i])
+ plt.savefig('targets.jpg', dpi=200)
+
+
+def plot_study_txt(path='', x=None): # from utils.plots import *; plot_study_txt()
+ # Plot study.txt generated by test.py
+ fig, ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)
+ # ax = ax.ravel()
+
+ fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
+ # for f in [Path(path) / f'study_coco_{x}.txt' for x in ['yolor-p6', 'yolor-w6', 'yolor-e6', 'yolor-d6']]:
+ for f in sorted(Path(path).glob('study*.txt')):
+ y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
+ x = np.arange(y.shape[1]) if x is None else np.array(x)
+ s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_inference (ms/img)', 't_NMS (ms/img)', 't_total (ms/img)']
+ # for i in range(7):
+ # ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)
+ # ax[i].set_title(s[i])
+
+ j = y[3].argmax() + 1
+ ax2.plot(y[6, 1:j], y[3, 1:j] * 1E2, '.-', linewidth=2, markersize=8,
+ label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
+
+ ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
+ 'k.-', linewidth=2, markersize=8, alpha=.25, label='EfficientDet')
+
+ ax2.grid(alpha=0.2)
+ ax2.set_yticks(np.arange(20, 60, 5))
+ ax2.set_xlim(0, 57)
+ ax2.set_ylim(30, 55)
+ ax2.set_xlabel('GPU Speed (ms/img)')
+ ax2.set_ylabel('COCO AP val')
+ ax2.legend(loc='lower right')
+ plt.savefig(str(Path(path).name) + '.png', dpi=300)
+
+
+def plot_labels(labels, names=(), save_dir=Path(''), loggers=None):
+ # plot dataset labels
+ print('Plotting labels... ')
+ c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
+ nc = int(c.max() + 1) # number of classes
+ colors = color_list()
+ x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])
+
+ # seaborn correlogram
+ sns.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
+ plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)
+ plt.close()
+
+ # matplotlib labels
+ matplotlib.use('svg') # faster
+ ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
+ ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
+ ax[0].set_ylabel('instances')
+ if 0 < len(names) < 30:
+ ax[0].set_xticks(range(len(names)))
+ ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ else:
+ ax[0].set_xlabel('classes')
+ sns.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
+ sns.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)
+
+ # rectangles
+ labels[:, 1:3] = 0.5 # center
+ labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
+ img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
+ for cls, *box in labels[:1000]:
+ ImageDraw.Draw(img).rectangle(box, width=1, outline=colors[int(cls) % 10]) # plot
+ ax[1].imshow(img)
+ ax[1].axis('off')
+
+ for a in [0, 1, 2, 3]:
+ for s in ['top', 'right', 'left', 'bottom']:
+ ax[a].spines[s].set_visible(False)
+
+ plt.savefig(save_dir / 'labels.jpg', dpi=200)
+ matplotlib.use('Agg')
+ plt.close()
+
+ # loggers
+ for k, v in loggers.items() or {}:
+ if k == 'wandb' and v:
+ v.log({"Labels": [v.Image(str(x), caption=x.name) for x in save_dir.glob('*labels*.jpg')]}, commit=False)
+
+
+def plot_evolution(yaml_file='data/hyp.finetune.yaml'): # from utils.plots import *; plot_evolution()
+ # Plot hyperparameter evolution results in evolve.txt
+ with open(yaml_file) as f:
+ hyp = yaml.load(f, Loader=yaml.SafeLoader)
+ x = np.loadtxt('evolve.txt', ndmin=2)
+ f = fitness(x)
+ # weights = (f - f.min()) ** 2 # for weighted results
+ plt.figure(figsize=(10, 12), tight_layout=True)
+ matplotlib.rc('font', **{'size': 8})
+ for i, (k, v) in enumerate(hyp.items()):
+ y = x[:, i + 7]
+ # mu = (y * weights).sum() / weights.sum() # best weighted result
+ mu = y[f.argmax()] # best single result
+ plt.subplot(6, 5, i + 1)
+ plt.scatter(y, f, c=hist2d(y, f, 20), cmap='viridis', alpha=.8, edgecolors='none')
+ plt.plot(mu, f.max(), 'k+', markersize=15)
+ plt.title('%s = %.3g' % (k, mu), fontdict={'size': 9}) # limit to 40 characters
+ if i % 5 != 0:
+ plt.yticks([])
+ print('%15s: %.3g' % (k, mu))
+ plt.savefig('evolve.png', dpi=200)
+ print('\nPlot saved as evolve.png')
+
+
+def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
+ # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()
+ ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
+ s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']
+ files = list(Path(save_dir).glob('frames*.txt'))
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
+ n = results.shape[1] # number of rows
+ x = np.arange(start, min(stop, n) if stop else n)
+ results = results[:, x]
+ t = (results[0] - results[0].min()) # set t0=0s
+ results[0] = x
+ for i, a in enumerate(ax):
+ if i < len(results):
+ label = labels[fi] if len(labels) else f.stem.replace('frames_', '')
+ a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)
+ a.set_title(s[i])
+ a.set_xlabel('time (s)')
+ # if fi == len(files) - 1:
+ # a.set_ylim(bottom=0)
+ for side in ['top', 'right']:
+ a.spines[side].set_visible(False)
+ else:
+ a.remove()
+ except Exception as e:
+ print('Warning: Plotting error for %s; %s' % (f, e))
+
+ ax[1].legend()
+ plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
+
+
+def plot_results_overlay(start=0, stop=0): # from utils.plots import *; plot_results_overlay()
+ # Plot training 'results*.txt', overlaying train and val losses
+ s = ['train', 'train', 'train', 'Precision', 'mAP@0.5', 'val', 'val', 'val', 'Recall', 'mAP@0.5:0.95'] # legends
+ t = ['Box', 'Objectness', 'Classification', 'P-R', 'mAP-F1'] # titles
+ for f in sorted(glob.glob('results*.txt') + glob.glob('../../Downloads/results*.txt')):
+ results = np.loadtxt(f, usecols=[2, 3, 4, 8, 9, 12, 13, 14, 10, 11], ndmin=2).T
+ n = results.shape[1] # number of rows
+ x = range(start, min(stop, n) if stop else n)
+ fig, ax = plt.subplots(1, 5, figsize=(14, 3.5), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(5):
+ for j in [i, i + 5]:
+ y = results[j, x]
+ ax[i].plot(x, y, marker='.', label=s[j])
+ # y_smooth = butter_lowpass_filtfilt(y)
+ # ax[i].plot(x, np.gradient(y_smooth), marker='.', label=s[j])
+
+ ax[i].set_title(t[i])
+ ax[i].legend()
+ ax[i].set_ylabel(f) if i == 0 else None # add filename
+ fig.savefig(f.replace('.txt', '.png'), dpi=200)
+
+
+def plot_results(start=0, stop=0, bucket='', id=(), labels=(), save_dir=''):
+ # Plot training 'results*.txt'. from utils.plots import *; plot_results(save_dir='runs/train/exp')
+ fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
+ ax = ax.ravel()
+ s = ['Box', 'Objectness', 'Classification', 'Precision', 'Recall',
+ 'val Box', 'val Objectness', 'val Classification', 'mAP@0.5', 'mAP@0.5:0.95']
+ if bucket:
+ # files = ['https://storage.googleapis.com/%s/results%g.txt' % (bucket, x) for x in id]
+ files = ['results%g.txt' % x for x in id]
+ c = ('gsutil cp ' + '%s ' * len(files) + '.') % tuple('gs://%s/results%g.txt' % (bucket, x) for x in id)
+ os.system(c)
+ else:
+ files = list(Path(save_dir).glob('results*.txt'))
+ assert len(files), 'No results.txt files found in %s, nothing to plot.' % os.path.abspath(save_dir)
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, usecols=[2, 3, 4, 8, 9, 12, 13, 14, 10, 11], ndmin=2).T
+ n = results.shape[1] # number of rows
+ x = range(start, min(stop, n) if stop else n)
+ for i in range(10):
+ y = results[i, x]
+ if i in [0, 1, 2, 5, 6, 7]:
+ y[y == 0] = np.nan # don't show zero loss values
+ # y /= y[0] # normalize
+ label = labels[fi] if len(labels) else f.stem
+ ax[i].plot(x, y, marker='.', label=label, linewidth=2, markersize=8)
+ ax[i].set_title(s[i])
+ # if i in [5, 6, 7]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print('Warning: Plotting error for %s; %s' % (f, e))
+
+ ax[1].legend()
+ fig.savefig(Path(save_dir) / 'results.png', dpi=200)
+
+
+def output_to_keypoint(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ kpts = o[:,6:]
+ o = o[:,:6]
+ for index, (*box, conf, cls) in enumerate(o.detach().cpu().numpy()):
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf, *list(kpts.detach().cpu().numpy()[index])])
+ return np.array(targets)
+
+
+def plot_skeleton_kpts(im, kpts, steps, orig_shape=None):
+ #Plot the skeleton and keypointsfor coco datatset
+ palette = np.array([[255, 128, 0], [255, 153, 51], [255, 178, 102],
+ [230, 230, 0], [255, 153, 255], [153, 204, 255],
+ [255, 102, 255], [255, 51, 255], [102, 178, 255],
+ [51, 153, 255], [255, 153, 153], [255, 102, 102],
+ [255, 51, 51], [153, 255, 153], [102, 255, 102],
+ [51, 255, 51], [0, 255, 0], [0, 0, 255], [255, 0, 0],
+ [255, 255, 255]])
+
+ skeleton = [[16, 14], [14, 12], [17, 15], [15, 13], [12, 13], [6, 12],
+ [7, 13], [6, 7], [6, 8], [7, 9], [8, 10], [9, 11], [2, 3],
+ [1, 2], [1, 3], [2, 4], [3, 5], [4, 6], [5, 7]]
+
+ pose_limb_color = palette[[9, 9, 9, 9, 7, 7, 7, 0, 0, 0, 0, 0, 16, 16, 16, 16, 16, 16, 16]]
+ pose_kpt_color = palette[[16, 16, 16, 16, 16, 0, 0, 0, 0, 0, 0, 9, 9, 9, 9, 9, 9]]
+ radius = 5
+ num_kpts = len(kpts) // steps
+
+ for kid in range(num_kpts):
+ r, g, b = pose_kpt_color[kid]
+ x_coord, y_coord = kpts[steps * kid], kpts[steps * kid + 1]
+ if not (x_coord % 640 == 0 or y_coord % 640 == 0):
+ if steps == 3:
+ conf = kpts[steps * kid + 2]
+ if conf < 0.5:
+ continue
+ cv2.circle(im, (int(x_coord), int(y_coord)), radius, (int(r), int(g), int(b)), -1)
+
+ for sk_id, sk in enumerate(skeleton):
+ r, g, b = pose_limb_color[sk_id]
+ pos1 = (int(kpts[(sk[0]-1)*steps]), int(kpts[(sk[0]-1)*steps+1]))
+ pos2 = (int(kpts[(sk[1]-1)*steps]), int(kpts[(sk[1]-1)*steps+1]))
+ if steps == 3:
+ conf1 = kpts[(sk[0]-1)*steps+2]
+ conf2 = kpts[(sk[1]-1)*steps+2]
+ if conf1<0.5 or conf2<0.5:
+ continue
+ if pos1[0]%640 == 0 or pos1[1]%640==0 or pos1[0]<0 or pos1[1]<0:
+ continue
+ if pos2[0] % 640 == 0 or pos2[1] % 640 == 0 or pos2[0]<0 or pos2[1]<0:
+ continue
+ cv2.line(im, pos1, pos2, (int(r), int(g), int(b)), thickness=2)
diff --git a/oneAPI_ODAV_APP/utils/torch_utils.py b/oneAPI_ODAV_APP/utils/torch_utils.py
new file mode 100644
index 000000000..311884e43
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/torch_utils.py
@@ -0,0 +1,375 @@
+# YOLOR PyTorch utils
+
+import datetime
+import logging
+import math
+import os
+import platform
+import subprocess
+import time
+from contextlib import contextmanager
+from copy import deepcopy
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+import torch.nn as nn
+import torch.nn.functional as F
+import torchvision
+
+
+try:
+ import thop # for FLOPS computation
+except ImportError:
+ thop = None
+logger = logging.getLogger(__name__)
+
+
+@contextmanager
+def torch_distributed_zero_first(local_rank: int):
+ """
+ Decorator to make all processes in distributed training wait for each local_master to do something.
+ """
+ if local_rank not in [-1, 0]:
+ torch.distributed.barrier()
+ yield
+ if local_rank == 0:
+ torch.distributed.barrier()
+
+
+def init_torch_seeds(seed=0):
+ # Speed-reproducibility tradeoff https://pytorch.org/docs/stable/notes/randomness.html
+ torch.manual_seed(seed)
+ if seed == 0: # slower, more reproducible
+ cudnn.benchmark, cudnn.deterministic = False, True
+ else: # faster, less reproducible
+ cudnn.benchmark, cudnn.deterministic = True, False
+
+
+def date_modified(path=__file__):
+ # return human-readable file modification date, i.e. '2021-3-26'
+ t = datetime.datetime.fromtimestamp(Path(path).stat().st_mtime)
+ return f'{t.year}-{t.month}-{t.day}'
+
+
+def git_describe(path=Path(__file__).parent): # path must be a directory
+ # return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
+ s = f'git -C {path} describe --tags --long --always'
+ try:
+ return subprocess.check_output(s, shell=True, stderr=subprocess.STDOUT).decode()[:-1]
+ except subprocess.CalledProcessError as e:
+ return '' # not a git repository
+
+
+def select_device(device='', batch_size=None):
+ # device = 'cpu' or '0' or '0,1,2,3'
+ s = f'YOLOR 🚀 {git_describe() or date_modified()} torch {torch.__version__} ' # string
+ cpu = device.lower() == 'cpu'
+ if cpu:
+ os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
+ elif device: # non-cpu device requested
+ os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable
+ assert torch.cuda.is_available(), f'CUDA unavailable, invalid device {device} requested' # check availability
+
+ cuda = not cpu and torch.cuda.is_available()
+ if cuda:
+ n = torch.cuda.device_count()
+ if n > 1 and batch_size: # check that batch_size is compatible with device_count
+ assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
+ space = ' ' * len(s)
+ for i, d in enumerate(device.split(',') if device else range(n)):
+ p = torch.cuda.get_device_properties(i)
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / 1024 ** 2}MB)\n" # bytes to MB
+ else:
+ s += 'CPU\n'
+
+ logger.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe
+ return torch.device('cuda:0' if cuda else 'cpu')
+
+
+def time_synchronized():
+ # pytorch-accurate time
+ if torch.cuda.is_available():
+ torch.cuda.synchronize()
+ return time.time()
+
+
+def profile(x, ops, n=100, device=None):
+ # profile a pytorch module or list of modules. Example usage:
+ # x = torch.randn(16, 3, 640, 640) # input
+ # m1 = lambda x: x * torch.sigmoid(x)
+ # m2 = nn.SiLU()
+ # profile(x, [m1, m2], n=100) # profile speed over 100 iterations
+
+ device = device or torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
+ x = x.to(device)
+ x.requires_grad = True
+ print(torch.__version__, device.type, torch.cuda.get_device_properties(0) if device.type == 'cuda' else '')
+ print(f"\n{'Params':>12s}{'GFLOPS':>12s}{'forward (ms)':>16s}{'backward (ms)':>16s}{'input':>24s}{'output':>24s}")
+ for m in ops if isinstance(ops, list) else [ops]:
+ m = m.to(device) if hasattr(m, 'to') else m # device
+ m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m # type
+ dtf, dtb, t = 0., 0., [0., 0., 0.] # dt forward, backward
+ try:
+ flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPS
+ except:
+ flops = 0
+
+ for _ in range(n):
+ t[0] = time_synchronized()
+ y = m(x)
+ t[1] = time_synchronized()
+ try:
+ _ = y.sum().backward()
+ t[2] = time_synchronized()
+ except: # no backward method
+ t[2] = float('nan')
+ dtf += (t[1] - t[0]) * 1000 / n # ms per op forward
+ dtb += (t[2] - t[1]) * 1000 / n # ms per op backward
+
+ s_in = tuple(x.shape) if isinstance(x, torch.Tensor) else 'list'
+ s_out = tuple(y.shape) if isinstance(y, torch.Tensor) else 'list'
+ p = sum(list(x.numel() for x in m.parameters())) if isinstance(m, nn.Module) else 0 # parameters
+ print(f'{p:12}{flops:12.4g}{dtf:16.4g}{dtb:16.4g}{str(s_in):>24s}{str(s_out):>24s}')
+
+
+def is_parallel(model):
+ return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
+
+
+def intersect_dicts(da, db, exclude=()):
+ # Dictionary intersection of matching keys and shapes, omitting 'exclude' keys, using da values
+ return {k: v for k, v in da.items() if k in db and not any(x in k for x in exclude) and v.shape == db[k].shape}
+
+
+def initialize_weights(model):
+ for m in model.modules():
+ t = type(m)
+ if t is nn.Conv2d:
+ pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
+ elif t is nn.BatchNorm2d:
+ m.eps = 1e-3
+ m.momentum = 0.03
+ elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6]:
+ m.inplace = True
+
+
+def find_modules(model, mclass=nn.Conv2d):
+ # Finds layer indices matching module class 'mclass'
+ return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
+
+
+def sparsity(model):
+ # Return global model sparsity
+ a, b = 0., 0.
+ for p in model.parameters():
+ a += p.numel()
+ b += (p == 0).sum()
+ return b / a
+
+
+def prune(model, amount=0.3):
+ # Prune model to requested global sparsity
+ import torch.nn.utils.prune as prune
+ print('Pruning model... ', end='')
+ for name, m in model.named_modules():
+ if isinstance(m, nn.Conv2d):
+ prune.l1_unstructured(m, name='weight', amount=amount) # prune
+ prune.remove(m, 'weight') # make permanent
+ print(' %.3g global sparsity' % sparsity(model))
+
+
+def fuse_conv_and_bn(conv, bn):
+ # Fuse convolution and batchnorm layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
+ fusedconv = nn.Conv2d(conv.in_channels,
+ conv.out_channels,
+ kernel_size=conv.kernel_size,
+ stride=conv.stride,
+ padding=conv.padding,
+ groups=conv.groups,
+ bias=True).requires_grad_(False).to(conv.weight.device)
+
+ # prepare filters
+ w_conv = conv.weight.clone().view(conv.out_channels, -1)
+ w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
+ fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
+
+ # prepare spatial bias
+ b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
+ b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
+ fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
+
+ return fusedconv
+
+
+def model_info(model, verbose=False, img_size=640):
+ # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
+ n_p = sum(x.numel() for x in model.parameters()) # number parameters
+ n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
+ if verbose:
+ print('%5s %40s %9s %12s %20s %10s %10s' % ('layer', 'name', 'gradient', 'parameters', 'shape', 'mu', 'sigma'))
+ for i, (name, p) in enumerate(model.named_parameters()):
+ name = name.replace('module_list.', '')
+ print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
+ (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
+
+ try: # FLOPS
+ from thop import profile
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32
+ img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input
+ flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPS
+ img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float
+ fs = ', %.1f GFLOPS' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPS
+ except (ImportError, Exception):
+ fs = ''
+
+ logger.info(f"Model Summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
+
+
+def load_classifier(name='resnet101', n=2):
+ # Loads a pretrained model reshaped to n-class output
+ model = torchvision.models.__dict__[name](pretrained=True)
+
+ # ResNet model properties
+ # input_size = [3, 224, 224]
+ # input_space = 'RGB'
+ # input_range = [0, 1]
+ # mean = [0.485, 0.456, 0.406]
+ # std = [0.229, 0.224, 0.225]
+
+ # Reshape output to n classes
+ filters = model.fc.weight.shape[1]
+ model.fc.bias = nn.Parameter(torch.zeros(n), requires_grad=True)
+ model.fc.weight = nn.Parameter(torch.zeros(n, filters), requires_grad=True)
+ model.fc.out_features = n
+ return model
+
+
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # scales img(bs,3,y,x) by ratio constrained to gs-multiple
+ if ratio == 1.0:
+ return img
+ else:
+ h, w = img.shape[2:]
+ s = (int(h * ratio), int(w * ratio)) # new size
+ img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
+ if not same_shape: # pad/crop img
+ h, w = [math.ceil(x * ratio / gs) * gs for x in (h, w)]
+ return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
+
+
+def copy_attr(a, b, include=(), exclude=()):
+ # Copy attributes from b to a, options to only include [...] and to exclude [...]
+ for k, v in b.__dict__.items():
+ if (len(include) and k not in include) or k.startswith('_') or k in exclude:
+ continue
+ else:
+ setattr(a, k, v)
+
+
+class ModelEMA:
+ """ Model Exponential Moving Average from https://github.com/rwightman/pytorch-image-models
+ Keep a moving average of everything in the model state_dict (parameters and buffers).
+ This is intended to allow functionality like
+ https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
+ A smoothed version of the weights is necessary for some training schemes to perform well.
+ This class is sensitive where it is initialized in the sequence of model init,
+ GPU assignment and distributed training wrappers.
+ """
+
+ def __init__(self, model, decay=0.9999, updates=0):
+ # Create EMA
+ self.ema = deepcopy(model.module if is_parallel(model) else model).eval() # FP32 EMA
+ # if next(model.parameters()).device.type != 'cpu':
+ # self.ema.half() # FP16 EMA
+ self.updates = updates # number of EMA updates
+ self.decay = lambda x: decay * (1 - math.exp(-x / 2000)) # decay exponential ramp (to help early epochs)
+ for p in self.ema.parameters():
+ p.requires_grad_(False)
+
+ def update(self, model):
+ # Update EMA parameters
+ with torch.no_grad():
+ self.updates += 1
+ d = self.decay(self.updates)
+
+ msd = model.module.state_dict() if is_parallel(model) else model.state_dict() # model state_dict
+ for k, v in self.ema.state_dict().items():
+ if v.dtype.is_floating_point:
+ v *= d
+ v += (1. - d) * msd[k].detach()
+
+ def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
+ # Update EMA attributes
+ copy_attr(self.ema, model, include, exclude)
+
+
+class BatchNormXd(torch.nn.modules.batchnorm._BatchNorm):
+ def _check_input_dim(self, input):
+ # The only difference between BatchNorm1d, BatchNorm2d, BatchNorm3d, etc
+ # is this method that is overwritten by the sub-class
+ # This original goal of this method was for tensor sanity checks
+ # If you're ok bypassing those sanity checks (eg. if you trust your inference
+ # to provide the right dimensional inputs), then you can just use this method
+ # for easy conversion from SyncBatchNorm
+ # (unfortunately, SyncBatchNorm does not store the original class - if it did
+ # we could return the one that was originally created)
+ return
+
+def revert_sync_batchnorm(module):
+ # this is very similar to the function that it is trying to revert:
+ # https://github.com/pytorch/pytorch/blob/c8b3686a3e4ba63dc59e5dcfe5db3430df256833/torch/nn/modules/batchnorm.py#L679
+ module_output = module
+ if isinstance(module, torch.nn.modules.batchnorm.SyncBatchNorm):
+ new_cls = BatchNormXd
+ module_output = BatchNormXd(module.num_features,
+ module.eps, module.momentum,
+ module.affine,
+ module.track_running_stats)
+ if module.affine:
+ with torch.no_grad():
+ module_output.weight = module.weight
+ module_output.bias = module.bias
+ module_output.running_mean = module.running_mean
+ module_output.running_var = module.running_var
+ module_output.num_batches_tracked = module.num_batches_tracked
+ if hasattr(module, "qconfig"):
+ module_output.qconfig = module.qconfig
+ for name, child in module.named_children():
+ module_output.add_module(name, revert_sync_batchnorm(child))
+ del module
+ return module_output
+
+
+class TracedModel(nn.Module):
+
+ def __init__(self, model=None, device=None, img_size=(640,640)):
+ super(TracedModel, self).__init__()
+
+ print(" Convert model to Traced-model... ")
+ self.stride = model.stride
+ self.names = model.names
+ self.model = model
+
+ self.model = revert_sync_batchnorm(self.model)
+ self.model.to('cpu')
+ self.model.eval()
+
+ self.detect_layer = self.model.model[-1]
+ self.model.traced = True
+
+ rand_example = torch.rand(1, 3, img_size, img_size)
+
+ traced_script_module = torch.jit.trace(self.model, rand_example, strict=False)
+ #traced_script_module = torch.jit.script(self.model)
+ traced_script_module.save("traced_model.pt")
+ print(" traced_script_module saved! ")
+ self.model = traced_script_module
+ self.model.to(device)
+ self.detect_layer.to(device)
+ print(" model is traced! \n")
+
+ def forward(self, x, augment=False, profile=False):
+ out = self.model(x)
+ out = self.detect_layer(out)
+ return out
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/utils/wandb_logging/__init__.py b/oneAPI_ODAV_APP/utils/wandb_logging/__init__.py
new file mode 100644
index 000000000..a6131c10e
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/wandb_logging/__init__.py
@@ -0,0 +1 @@
+# init
diff --git a/oneAPI_ODAV_APP/utils/wandb_logging/log_dataset.py b/oneAPI_ODAV_APP/utils/wandb_logging/log_dataset.py
new file mode 100644
index 000000000..600598f3e
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/wandb_logging/log_dataset.py
@@ -0,0 +1,25 @@
+import argparse
+
+import yaml
+
+
+from wandb_utils import WandbLogger
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ with open(opt.data) as f:
+ data = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ logger = WandbLogger(opt, '', None, data, job_type='Dataset Creation')
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOR', help='name of W&B Project')
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/oneAPI_ODAV_APP/utils/wandb_logging/wandb_utils.py b/oneAPI_ODAV_APP/utils/wandb_logging/wandb_utils.py
new file mode 100644
index 000000000..22eb58533
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/wandb_logging/wandb_utils.py
@@ -0,0 +1,307 @@
+import json
+import sys
+from pathlib import Path
+
+
+import torch
+import yaml
+from tqdm import tqdm
+
+sys.path.append(str(Path(__file__).parent.parent.parent)) # add utils/ to path
+from utils.datasets import LoadImagesAndLabels
+from utils.datasets import img2label_paths
+from utils.general import colorstr, xywh2xyxy, check_dataset
+
+try:
+ import wandb
+ from wandb import init, finish
+except ImportError:
+ wandb = None
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):
+ return from_string[len(prefix):]
+
+
+def check_wandb_config_file(data_config_file):
+ wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path
+ if Path(wandb_config).is_file():
+ return wandb_config
+ return data_config_file
+
+
+def get_run_info(run_path):
+ run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))
+ run_id = run_path.stem
+ project = run_path.parent.stem
+ model_artifact_name = 'run_' + run_id + '_model'
+ return run_id, project, model_artifact_name
+
+
+def check_wandb_resume(opt):
+ process_wandb_config_ddp_mode(opt) if opt.global_rank not in [-1, 0] else None
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ if opt.global_rank not in [-1, 0]: # For resuming DDP runs
+ run_id, project, model_artifact_name = get_run_info(opt.resume)
+ api = wandb.Api()
+ artifact = api.artifact(project + '/' + model_artifact_name + ':latest')
+ modeldir = artifact.download()
+ opt.weights = str(Path(modeldir) / "last.pt")
+ return True
+ return None
+
+
+def process_wandb_config_ddp_mode(opt):
+ with open(opt.data) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ train_dir, val_dir = None, None
+ if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)
+ train_dir = train_artifact.download()
+ train_path = Path(train_dir) / 'data/images/'
+ data_dict['train'] = str(train_path)
+
+ if isinstance(data_dict['val'], str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ val_artifact = api.artifact(remove_prefix(data_dict['val']) + ':' + opt.artifact_alias)
+ val_dir = val_artifact.download()
+ val_path = Path(val_dir) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ if train_dir or val_dir:
+ ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')
+ with open(ddp_data_path, 'w') as f:
+ yaml.dump(data_dict, f)
+ opt.data = ddp_data_path
+
+
+class WandbLogger():
+ def __init__(self, opt, name, run_id, data_dict, job_type='Training'):
+ # Pre-training routine --
+ self.job_type = job_type
+ self.wandb, self.wandb_run, self.data_dict = wandb, None if not wandb else wandb.run, data_dict
+ # It's more elegant to stick to 1 wandb.init call, but useful config data is overwritten in the WandbLogger's wandb.init call
+ if isinstance(opt.resume, str): # checks resume from artifact
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ run_id, project, model_artifact_name = get_run_info(opt.resume)
+ model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name
+ assert wandb, 'install wandb to resume wandb runs'
+ # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config
+ self.wandb_run = wandb.init(id=run_id, project=project, resume='allow')
+ opt.resume = model_artifact_name
+ elif self.wandb:
+ self.wandb_run = wandb.init(config=opt,
+ resume="allow",
+ project='YOLOR' if opt.project == 'runs/train' else Path(opt.project).stem,
+ name=name,
+ job_type=job_type,
+ id=run_id) if not wandb.run else wandb.run
+ if self.wandb_run:
+ if self.job_type == 'Training':
+ if not opt.resume:
+ wandb_data_dict = self.check_and_upload_dataset(opt) if opt.upload_dataset else data_dict
+ # Info useful for resuming from artifacts
+ self.wandb_run.config.opt = vars(opt)
+ self.wandb_run.config.data_dict = wandb_data_dict
+ self.data_dict = self.setup_training(opt, data_dict)
+ if self.job_type == 'Dataset Creation':
+ self.data_dict = self.check_and_upload_dataset(opt)
+ else:
+ prefix = colorstr('wandb: ')
+ print(f"{prefix}Install Weights & Biases for YOLOR logging with 'pip install wandb' (recommended)")
+
+ def check_and_upload_dataset(self, opt):
+ assert wandb, 'Install wandb to upload dataset'
+ check_dataset(self.data_dict)
+ config_path = self.log_dataset_artifact(opt.data,
+ opt.single_cls,
+ 'YOLOR' if opt.project == 'runs/train' else Path(opt.project).stem)
+ print("Created dataset config file ", config_path)
+ with open(config_path) as f:
+ wandb_data_dict = yaml.load(f, Loader=yaml.SafeLoader)
+ return wandb_data_dict
+
+ def setup_training(self, opt, data_dict):
+ self.log_dict, self.current_epoch, self.log_imgs = {}, 0, 16 # Logging Constants
+ self.bbox_interval = opt.bbox_interval
+ if isinstance(opt.resume, str):
+ modeldir, _ = self.download_model_artifact(opt)
+ if modeldir:
+ self.weights = Path(modeldir) / "last.pt"
+ config = self.wandb_run.config
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp = str(
+ self.weights), config.save_period, config.total_batch_size, config.bbox_interval, config.epochs, \
+ config.opt['hyp']
+ data_dict = dict(self.wandb_run.config.data_dict) # eliminates the need for config file to resume
+ if 'val_artifact' not in self.__dict__: # If --upload_dataset is set, use the existing artifact, don't download
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(data_dict.get('train'),
+ opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(data_dict.get('val'),
+ opt.artifact_alias)
+ self.result_artifact, self.result_table, self.val_table, self.weights = None, None, None, None
+ if self.train_artifact_path is not None:
+ train_path = Path(self.train_artifact_path) / 'data/images/'
+ data_dict['train'] = str(train_path)
+ if self.val_artifact_path is not None:
+ val_path = Path(self.val_artifact_path) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ self.val_table = self.val_artifact.get("val")
+ self.map_val_table_path()
+ if self.val_artifact is not None:
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+ self.result_table = wandb.Table(["epoch", "id", "prediction", "avg_confidence"])
+ if opt.bbox_interval == -1:
+ self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ return data_dict
+
+ def download_dataset_artifact(self, path, alias):
+ if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):
+ dataset_artifact = wandb.use_artifact(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + ":" + alias)
+ assert dataset_artifact is not None, "'Error: W&B dataset artifact doesn\'t exist'"
+ datadir = dataset_artifact.download()
+ return datadir, dataset_artifact
+ return None, None
+
+ def download_model_artifact(self, opt):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
+ assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
+ modeldir = model_artifact.download()
+ epochs_trained = model_artifact.metadata.get('epochs_trained')
+ total_epochs = model_artifact.metadata.get('total_epochs')
+ assert epochs_trained < total_epochs, 'training to %g epochs is finished, nothing to resume.' % (
+ total_epochs)
+ return modeldir, model_artifact
+ return None, None
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model', type='model', metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score
+ })
+ model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
+ wandb.log_artifact(model_artifact,
+ aliases=['latest', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
+ print("Saving model artifact on epoch ", epoch + 1)
+
+ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):
+ with open(data_file) as f:
+ data = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])
+ names = {k: v for k, v in enumerate(names)} # to index dictionary
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['train']), names, name='train') if data.get('train') else None
+ self.val_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['val']), names, name='val') if data.get('val') else None
+ if data.get('train'):
+ data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
+ if data.get('val'):
+ data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
+ path = data_file if overwrite_config else '_wandb.'.join(data_file.rsplit('.', 1)) # updated data.yaml path
+ data.pop('download', None)
+ with open(path, 'w') as f:
+ yaml.dump(data, f)
+
+ if self.job_type == 'Training': # builds correct artifact pipeline graph
+ self.wandb_run.use_artifact(self.val_artifact)
+ self.wandb_run.use_artifact(self.train_artifact)
+ self.val_artifact.wait()
+ self.val_table = self.val_artifact.get('val')
+ self.map_val_table_path()
+ else:
+ self.wandb_run.log_artifact(self.train_artifact)
+ self.wandb_run.log_artifact(self.val_artifact)
+ return path
+
+ def map_val_table_path(self):
+ self.val_table_map = {}
+ print("Mapping dataset")
+ for i, data in enumerate(tqdm(self.val_table.data)):
+ self.val_table_map[data[3]] = data[0]
+
+ def create_dataset_table(self, dataset, class_to_id, name='dataset'):
+ # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
+ artifact = wandb.Artifact(name=name, type="dataset")
+ img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
+ img_files = tqdm(dataset.img_files) if not img_files else img_files
+ for img_file in img_files:
+ if Path(img_file).is_dir():
+ artifact.add_dir(img_file, name='data/images')
+ labels_path = 'labels'.join(dataset.path.rsplit('images', 1))
+ artifact.add_dir(labels_path, name='data/labels')
+ else:
+ artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
+ label_file = Path(img2label_paths([img_file])[0])
+ artifact.add_file(str(label_file),
+ name='data/labels/' + label_file.name) if label_file.exists() else None
+ table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
+ for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
+ height, width = shapes[0]
+ labels[:, 2:] = (xywh2xyxy(labels[:, 2:].view(-1, 4))) * torch.Tensor([width, height, width, height])
+ box_data, img_classes = [], {}
+ for cls, *xyxy in labels[:, 1:].tolist():
+ cls = int(cls)
+ box_data.append({"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls]),
+ "scores": {"acc": 1},
+ "domain": "pixel"})
+ img_classes[cls] = class_to_id[cls]
+ boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
+ table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), json.dumps(img_classes),
+ Path(paths).name)
+ artifact.add(table, name)
+ return artifact
+
+ def log_training_progress(self, predn, path, names):
+ if self.val_table and self.result_table:
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])
+ box_data = []
+ total_conf = 0
+ for *xyxy, conf, cls in predn.tolist():
+ if conf >= 0.25:
+ box_data.append(
+ {"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": "%s %.3f" % (names[cls], conf),
+ "scores": {"class_score": conf},
+ "domain": "pixel"})
+ total_conf = total_conf + conf
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ id = self.val_table_map[Path(path).name]
+ self.result_table.add_data(self.current_epoch,
+ id,
+ wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
+ total_conf / max(1, len(box_data))
+ )
+
+ def log(self, log_dict):
+ if self.wandb_run:
+ for key, value in log_dict.items():
+ self.log_dict[key] = value
+
+ def end_epoch(self, best_result=False):
+ if self.wandb_run:
+ wandb.log(self.log_dict)
+ self.log_dict = {}
+ if self.result_artifact:
+ train_results = wandb.JoinedTable(self.val_table, self.result_table, "id")
+ self.result_artifact.add(train_results, 'result')
+ wandb.log_artifact(self.result_artifact, aliases=['latest', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
+ self.result_table = wandb.Table(["epoch", "id", "prediction", "avg_confidence"])
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+
+ def finish_run(self):
+ if self.wandb_run:
+ if self.log_dict:
+ wandb.log(self.log_dict)
+ wandb.run.finish()
diff --git a/results/instance-segmentation/horses.jpg b/results/instance-segmentation/horses.jpg
new file mode 100644
index 000000000..a3b9648ea
Binary files /dev/null and b/results/instance-segmentation/horses.jpg differ
diff --git a/results/instance-segmentation/instance.mp4 b/results/instance-segmentation/instance.mp4
new file mode 100644
index 000000000..a64d1f30c
Binary files /dev/null and b/results/instance-segmentation/instance.mp4 differ
diff --git a/results/instance-segmentation/readme.md b/results/instance-segmentation/readme.md
new file mode 100644
index 000000000..9b6019000
--- /dev/null
+++ b/results/instance-segmentation/readme.md
@@ -0,0 +1,4 @@
+- To run the instance segmentation
+``` python ipex/seg/segment/predict.py --weights yolov7-seg.pt --source https://www.youtube.com/watch?v=A46cuxIPUSs&t=15s ```
+- Results saved at
+``` seg/runs/predict-seg/exp ```
diff --git a/yolov7_seg/README.md b/yolov7_seg/README.md
new file mode 100644
index 000000000..4ba85cfc2
--- /dev/null
+++ b/yolov7_seg/README.md
@@ -0,0 +1,17 @@
+# yolov7
+
+Implementation of "YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors"
+
+This implimentation is based on [yolov5](https://github.com/ultralytics/yolov5).
+
+## Object detection
+
+[code](./det)
+
+## Instance segmentation
+
+[code](./seg)
+
+## Image classification
+
+[code](./det)
diff --git a/yolov7_seg/cls/LICENSE b/yolov7_seg/cls/LICENSE
new file mode 100644
index 000000000..d96f36bb0
--- /dev/null
+++ b/yolov7_seg/cls/LICENSE
@@ -0,0 +1,674 @@
+GNU GENERAL PUBLIC LICENSE
+ Version 3, 29 June 2007
+
+ Copyright (C) 2007 Free Software Foundation, Inc.
+ Everyone is permitted to copy and distribute verbatim copies
+ of this license document, but changing it is not allowed.
+
+ Preamble
+
+ The GNU General Public License is a free, copyleft license for
+software and other kinds of works.
+
+ The licenses for most software and other practical works are designed
+to take away your freedom to share and change the works. By contrast,
+the GNU General Public License is intended to guarantee your freedom to
+share and change all versions of a program--to make sure it remains free
+software for all its users. We, the Free Software Foundation, use the
+GNU General Public License for most of our software; it applies also to
+any other work released this way by its authors. You can apply it to
+your programs, too.
+
+ When we speak of free software, we are referring to freedom, not
+price. Our General Public Licenses are designed to make sure that you
+have the freedom to distribute copies of free software (and charge for
+them if you wish), that you receive source code or can get it if you
+want it, that you can change the software or use pieces of it in new
+free programs, and that you know you can do these things.
+
+ To protect your rights, we need to prevent others from denying you
+these rights or asking you to surrender the rights. Therefore, you have
+certain responsibilities if you distribute copies of the software, or if
+you modify it: responsibilities to respect the freedom of others.
+
+ For example, if you distribute copies of such a program, whether
+gratis or for a fee, you must pass on to the recipients the same
+freedoms that you received. You must make sure that they, too, receive
+or can get the source code. And you must show them these terms so they
+know their rights.
+
+ Developers that use the GNU GPL protect your rights with two steps:
+(1) assert copyright on the software, and (2) offer you this License
+giving you legal permission to copy, distribute and/or modify it.
+
+ For the developers' and authors' protection, the GPL clearly explains
+that there is no warranty for this free software. For both users' and
+authors' sake, the GPL requires that modified versions be marked as
+changed, so that their problems will not be attributed erroneously to
+authors of previous versions.
+
+ Some devices are designed to deny users access to install or run
+modified versions of the software inside them, although the manufacturer
+can do so. This is fundamentally incompatible with the aim of
+protecting users' freedom to change the software. The systematic
+pattern of such abuse occurs in the area of products for individuals to
+use, which is precisely where it is most unacceptable. Therefore, we
+have designed this version of the GPL to prohibit the practice for those
+products. If such problems arise substantially in other domains, we
+stand ready to extend this provision to those domains in future versions
+of the GPL, as needed to protect the freedom of users.
+
+ Finally, every program is threatened constantly by software patents.
+States should not allow patents to restrict development and use of
+software on general-purpose computers, but in those that do, we wish to
+avoid the special danger that patents applied to a free program could
+make it effectively proprietary. To prevent this, the GPL assures that
+patents cannot be used to render the program non-free.
+
+ The precise terms and conditions for copying, distribution and
+modification follow.
+
+ TERMS AND CONDITIONS
+
+ 0. Definitions.
+
+ "This License" refers to version 3 of the GNU General Public License.
+
+ "Copyright" also means copyright-like laws that apply to other kinds of
+works, such as semiconductor masks.
+
+ "The Program" refers to any copyrightable work licensed under this
+License. Each licensee is addressed as "you". "Licensees" and
+"recipients" may be individuals or organizations.
+
+ To "modify" a work means to copy from or adapt all or part of the work
+in a fashion requiring copyright permission, other than the making of an
+exact copy. The resulting work is called a "modified version" of the
+earlier work or a work "based on" the earlier work.
+
+ A "covered work" means either the unmodified Program or a work based
+on the Program.
+
+ To "propagate" a work means to do anything with it that, without
+permission, would make you directly or secondarily liable for
+infringement under applicable copyright law, except executing it on a
+computer or modifying a private copy. Propagation includes copying,
+distribution (with or without modification), making available to the
+public, and in some countries other activities as well.
+
+ To "convey" a work means any kind of propagation that enables other
+parties to make or receive copies. Mere interaction with a user through
+a computer network, with no transfer of a copy, is not conveying.
+
+ An interactive user interface displays "Appropriate Legal Notices"
+to the extent that it includes a convenient and prominently visible
+feature that (1) displays an appropriate copyright notice, and (2)
+tells the user that there is no warranty for the work (except to the
+extent that warranties are provided), that licensees may convey the
+work under this License, and how to view a copy of this License. If
+the interface presents a list of user commands or options, such as a
+menu, a prominent item in the list meets this criterion.
+
+ 1. Source Code.
+
+ The "source code" for a work means the preferred form of the work
+for making modifications to it. "Object code" means any non-source
+form of a work.
+
+ A "Standard Interface" means an interface that either is an official
+standard defined by a recognized standards body, or, in the case of
+interfaces specified for a particular programming language, one that
+is widely used among developers working in that language.
+
+ The "System Libraries" of an executable work include anything, other
+than the work as a whole, that (a) is included in the normal form of
+packaging a Major Component, but which is not part of that Major
+Component, and (b) serves only to enable use of the work with that
+Major Component, or to implement a Standard Interface for which an
+implementation is available to the public in source code form. A
+"Major Component", in this context, means a major essential component
+(kernel, window system, and so on) of the specific operating system
+(if any) on which the executable work runs, or a compiler used to
+produce the work, or an object code interpreter used to run it.
+
+ The "Corresponding Source" for a work in object code form means all
+the source code needed to generate, install, and (for an executable
+work) run the object code and to modify the work, including scripts to
+control those activities. However, it does not include the work's
+System Libraries, or general-purpose tools or generally available free
+programs which are used unmodified in performing those activities but
+which are not part of the work. For example, Corresponding Source
+includes interface definition files associated with source files for
+the work, and the source code for shared libraries and dynamically
+linked subprograms that the work is specifically designed to require,
+such as by intimate data communication or control flow between those
+subprograms and other parts of the work.
+
+ The Corresponding Source need not include anything that users
+can regenerate automatically from other parts of the Corresponding
+Source.
+
+ The Corresponding Source for a work in source code form is that
+same work.
+
+ 2. Basic Permissions.
+
+ All rights granted under this License are granted for the term of
+copyright on the Program, and are irrevocable provided the stated
+conditions are met. This License explicitly affirms your unlimited
+permission to run the unmodified Program. The output from running a
+covered work is covered by this License only if the output, given its
+content, constitutes a covered work. This License acknowledges your
+rights of fair use or other equivalent, as provided by copyright law.
+
+ You may make, run and propagate covered works that you do not
+convey, without conditions so long as your license otherwise remains
+in force. You may convey covered works to others for the sole purpose
+of having them make modifications exclusively for you, or provide you
+with facilities for running those works, provided that you comply with
+the terms of this License in conveying all material for which you do
+not control copyright. Those thus making or running the covered works
+for you must do so exclusively on your behalf, under your direction
+and control, on terms that prohibit them from making any copies of
+your copyrighted material outside their relationship with you.
+
+ Conveying under any other circumstances is permitted solely under
+the conditions stated below. Sublicensing is not allowed; section 10
+makes it unnecessary.
+
+ 3. Protecting Users' Legal Rights From Anti-Circumvention Law.
+
+ No covered work shall be deemed part of an effective technological
+measure under any applicable law fulfilling obligations under article
+11 of the WIPO copyright treaty adopted on 20 December 1996, or
+similar laws prohibiting or restricting circumvention of such
+measures.
+
+ When you convey a covered work, you waive any legal power to forbid
+circumvention of technological measures to the extent such circumvention
+is effected by exercising rights under this License with respect to
+the covered work, and you disclaim any intention to limit operation or
+modification of the work as a means of enforcing, against the work's
+users, your or third parties' legal rights to forbid circumvention of
+technological measures.
+
+ 4. Conveying Verbatim Copies.
+
+ You may convey verbatim copies of the Program's source code as you
+receive it, in any medium, provided that you conspicuously and
+appropriately publish on each copy an appropriate copyright notice;
+keep intact all notices stating that this License and any
+non-permissive terms added in accord with section 7 apply to the code;
+keep intact all notices of the absence of any warranty; and give all
+recipients a copy of this License along with the Program.
+
+ You may charge any price or no price for each copy that you convey,
+and you may offer support or warranty protection for a fee.
+
+ 5. Conveying Modified Source Versions.
+
+ You may convey a work based on the Program, or the modifications to
+produce it from the Program, in the form of source code under the
+terms of section 4, provided that you also meet all of these conditions:
+
+ a) The work must carry prominent notices stating that you modified
+ it, and giving a relevant date.
+
+ b) The work must carry prominent notices stating that it is
+ released under this License and any conditions added under section
+ 7. This requirement modifies the requirement in section 4 to
+ "keep intact all notices".
+
+ c) You must license the entire work, as a whole, under this
+ License to anyone who comes into possession of a copy. This
+ License will therefore apply, along with any applicable section 7
+ additional terms, to the whole of the work, and all its parts,
+ regardless of how they are packaged. This License gives no
+ permission to license the work in any other way, but it does not
+ invalidate such permission if you have separately received it.
+
+ d) If the work has interactive user interfaces, each must display
+ Appropriate Legal Notices; however, if the Program has interactive
+ interfaces that do not display Appropriate Legal Notices, your
+ work need not make them do so.
+
+ A compilation of a covered work with other separate and independent
+works, which are not by their nature extensions of the covered work,
+and which are not combined with it such as to form a larger program,
+in or on a volume of a storage or distribution medium, is called an
+"aggregate" if the compilation and its resulting copyright are not
+used to limit the access or legal rights of the compilation's users
+beyond what the individual works permit. Inclusion of a covered work
+in an aggregate does not cause this License to apply to the other
+parts of the aggregate.
+
+ 6. Conveying Non-Source Forms.
+
+ You may convey a covered work in object code form under the terms
+of sections 4 and 5, provided that you also convey the
+machine-readable Corresponding Source under the terms of this License,
+in one of these ways:
+
+ a) Convey the object code in, or embodied in, a physical product
+ (including a physical distribution medium), accompanied by the
+ Corresponding Source fixed on a durable physical medium
+ customarily used for software interchange.
+
+ b) Convey the object code in, or embodied in, a physical product
+ (including a physical distribution medium), accompanied by a
+ written offer, valid for at least three years and valid for as
+ long as you offer spare parts or customer support for that product
+ model, to give anyone who possesses the object code either (1) a
+ copy of the Corresponding Source for all the software in the
+ product that is covered by this License, on a durable physical
+ medium customarily used for software interchange, for a price no
+ more than your reasonable cost of physically performing this
+ conveying of source, or (2) access to copy the
+ Corresponding Source from a network server at no charge.
+
+ c) Convey individual copies of the object code with a copy of the
+ written offer to provide the Corresponding Source. This
+ alternative is allowed only occasionally and noncommercially, and
+ only if you received the object code with such an offer, in accord
+ with subsection 6b.
+
+ d) Convey the object code by offering access from a designated
+ place (gratis or for a charge), and offer equivalent access to the
+ Corresponding Source in the same way through the same place at no
+ further charge. You need not require recipients to copy the
+ Corresponding Source along with the object code. If the place to
+ copy the object code is a network server, the Corresponding Source
+ may be on a different server (operated by you or a third party)
+ that supports equivalent copying facilities, provided you maintain
+ clear directions next to the object code saying where to find the
+ Corresponding Source. Regardless of what server hosts the
+ Corresponding Source, you remain obligated to ensure that it is
+ available for as long as needed to satisfy these requirements.
+
+ e) Convey the object code using peer-to-peer transmission, provided
+ you inform other peers where the object code and Corresponding
+ Source of the work are being offered to the general public at no
+ charge under subsection 6d.
+
+ A separable portion of the object code, whose source code is excluded
+from the Corresponding Source as a System Library, need not be
+included in conveying the object code work.
+
+ A "User Product" is either (1) a "consumer product", which means any
+tangible personal property which is normally used for personal, family,
+or household purposes, or (2) anything designed or sold for incorporation
+into a dwelling. In determining whether a product is a consumer product,
+doubtful cases shall be resolved in favor of coverage. For a particular
+product received by a particular user, "normally used" refers to a
+typical or common use of that class of product, regardless of the status
+of the particular user or of the way in which the particular user
+actually uses, or expects or is expected to use, the product. A product
+is a consumer product regardless of whether the product has substantial
+commercial, industrial or non-consumer uses, unless such uses represent
+the only significant mode of use of the product.
+
+ "Installation Information" for a User Product means any methods,
+procedures, authorization keys, or other information required to install
+and execute modified versions of a covered work in that User Product from
+a modified version of its Corresponding Source. The information must
+suffice to ensure that the continued functioning of the modified object
+code is in no case prevented or interfered with solely because
+modification has been made.
+
+ If you convey an object code work under this section in, or with, or
+specifically for use in, a User Product, and the conveying occurs as
+part of a transaction in which the right of possession and use of the
+User Product is transferred to the recipient in perpetuity or for a
+fixed term (regardless of how the transaction is characterized), the
+Corresponding Source conveyed under this section must be accompanied
+by the Installation Information. But this requirement does not apply
+if neither you nor any third party retains the ability to install
+modified object code on the User Product (for example, the work has
+been installed in ROM).
+
+ The requirement to provide Installation Information does not include a
+requirement to continue to provide support service, warranty, or updates
+for a work that has been modified or installed by the recipient, or for
+the User Product in which it has been modified or installed. Access to a
+network may be denied when the modification itself materially and
+adversely affects the operation of the network or violates the rules and
+protocols for communication across the network.
+
+ Corresponding Source conveyed, and Installation Information provided,
+in accord with this section must be in a format that is publicly
+documented (and with an implementation available to the public in
+source code form), and must require no special password or key for
+unpacking, reading or copying.
+
+ 7. Additional Terms.
+
+ "Additional permissions" are terms that supplement the terms of this
+License by making exceptions from one or more of its conditions.
+Additional permissions that are applicable to the entire Program shall
+be treated as though they were included in this License, to the extent
+that they are valid under applicable law. If additional permissions
+apply only to part of the Program, that part may be used separately
+under those permissions, but the entire Program remains governed by
+this License without regard to the additional permissions.
+
+ When you convey a copy of a covered work, you may at your option
+remove any additional permissions from that copy, or from any part of
+it. (Additional permissions may be written to require their own
+removal in certain cases when you modify the work.) You may place
+additional permissions on material, added by you to a covered work,
+for which you have or can give appropriate copyright permission.
+
+ Notwithstanding any other provision of this License, for material you
+add to a covered work, you may (if authorized by the copyright holders of
+that material) supplement the terms of this License with terms:
+
+ a) Disclaiming warranty or limiting liability differently from the
+ terms of sections 15 and 16 of this License; or
+
+ b) Requiring preservation of specified reasonable legal notices or
+ author attributions in that material or in the Appropriate Legal
+ Notices displayed by works containing it; or
+
+ c) Prohibiting misrepresentation of the origin of that material, or
+ requiring that modified versions of such material be marked in
+ reasonable ways as different from the original version; or
+
+ d) Limiting the use for publicity purposes of names of licensors or
+ authors of the material; or
+
+ e) Declining to grant rights under trademark law for use of some
+ trade names, trademarks, or service marks; or
+
+ f) Requiring indemnification of licensors and authors of that
+ material by anyone who conveys the material (or modified versions of
+ it) with contractual assumptions of liability to the recipient, for
+ any liability that these contractual assumptions directly impose on
+ those licensors and authors.
+
+ All other non-permissive additional terms are considered "further
+restrictions" within the meaning of section 10. If the Program as you
+received it, or any part of it, contains a notice stating that it is
+governed by this License along with a term that is a further
+restriction, you may remove that term. If a license document contains
+a further restriction but permits relicensing or conveying under this
+License, you may add to a covered work material governed by the terms
+of that license document, provided that the further restriction does
+not survive such relicensing or conveying.
+
+ If you add terms to a covered work in accord with this section, you
+must place, in the relevant source files, a statement of the
+additional terms that apply to those files, or a notice indicating
+where to find the applicable terms.
+
+ Additional terms, permissive or non-permissive, may be stated in the
+form of a separately written license, or stated as exceptions;
+the above requirements apply either way.
+
+ 8. Termination.
+
+ You may not propagate or modify a covered work except as expressly
+provided under this License. Any attempt otherwise to propagate or
+modify it is void, and will automatically terminate your rights under
+this License (including any patent licenses granted under the third
+paragraph of section 11).
+
+ However, if you cease all violation of this License, then your
+license from a particular copyright holder is reinstated (a)
+provisionally, unless and until the copyright holder explicitly and
+finally terminates your license, and (b) permanently, if the copyright
+holder fails to notify you of the violation by some reasonable means
+prior to 60 days after the cessation.
+
+ Moreover, your license from a particular copyright holder is
+reinstated permanently if the copyright holder notifies you of the
+violation by some reasonable means, this is the first time you have
+received notice of violation of this License (for any work) from that
+copyright holder, and you cure the violation prior to 30 days after
+your receipt of the notice.
+
+ Termination of your rights under this section does not terminate the
+licenses of parties who have received copies or rights from you under
+this License. If your rights have been terminated and not permanently
+reinstated, you do not qualify to receive new licenses for the same
+material under section 10.
+
+ 9. Acceptance Not Required for Having Copies.
+
+ You are not required to accept this License in order to receive or
+run a copy of the Program. Ancillary propagation of a covered work
+occurring solely as a consequence of using peer-to-peer transmission
+to receive a copy likewise does not require acceptance. However,
+nothing other than this License grants you permission to propagate or
+modify any covered work. These actions infringe copyright if you do
+not accept this License. Therefore, by modifying or propagating a
+covered work, you indicate your acceptance of this License to do so.
+
+ 10. Automatic Licensing of Downstream Recipients.
+
+ Each time you convey a covered work, the recipient automatically
+receives a license from the original licensors, to run, modify and
+propagate that work, subject to this License. You are not responsible
+for enforcing compliance by third parties with this License.
+
+ An "entity transaction" is a transaction transferring control of an
+organization, or substantially all assets of one, or subdividing an
+organization, or merging organizations. If propagation of a covered
+work results from an entity transaction, each party to that
+transaction who receives a copy of the work also receives whatever
+licenses to the work the party's predecessor in interest had or could
+give under the previous paragraph, plus a right to possession of the
+Corresponding Source of the work from the predecessor in interest, if
+the predecessor has it or can get it with reasonable efforts.
+
+ You may not impose any further restrictions on the exercise of the
+rights granted or affirmed under this License. For example, you may
+not impose a license fee, royalty, or other charge for exercise of
+rights granted under this License, and you may not initiate litigation
+(including a cross-claim or counterclaim in a lawsuit) alleging that
+any patent claim is infringed by making, using, selling, offering for
+sale, or importing the Program or any portion of it.
+
+ 11. Patents.
+
+ A "contributor" is a copyright holder who authorizes use under this
+License of the Program or a work on which the Program is based. The
+work thus licensed is called the contributor's "contributor version".
+
+ A contributor's "essential patent claims" are all patent claims
+owned or controlled by the contributor, whether already acquired or
+hereafter acquired, that would be infringed by some manner, permitted
+by this License, of making, using, or selling its contributor version,
+but do not include claims that would be infringed only as a
+consequence of further modification of the contributor version. For
+purposes of this definition, "control" includes the right to grant
+patent sublicenses in a manner consistent with the requirements of
+this License.
+
+ Each contributor grants you a non-exclusive, worldwide, royalty-free
+patent license under the contributor's essential patent claims, to
+make, use, sell, offer for sale, import and otherwise run, modify and
+propagate the contents of its contributor version.
+
+ In the following three paragraphs, a "patent license" is any express
+agreement or commitment, however denominated, not to enforce a patent
+(such as an express permission to practice a patent or covenant not to
+sue for patent infringement). To "grant" such a patent license to a
+party means to make such an agreement or commitment not to enforce a
+patent against the party.
+
+ If you convey a covered work, knowingly relying on a patent license,
+and the Corresponding Source of the work is not available for anyone
+to copy, free of charge and under the terms of this License, through a
+publicly available network server or other readily accessible means,
+then you must either (1) cause the Corresponding Source to be so
+available, or (2) arrange to deprive yourself of the benefit of the
+patent license for this particular work, or (3) arrange, in a manner
+consistent with the requirements of this License, to extend the patent
+license to downstream recipients. "Knowingly relying" means you have
+actual knowledge that, but for the patent license, your conveying the
+covered work in a country, or your recipient's use of the covered work
+in a country, would infringe one or more identifiable patents in that
+country that you have reason to believe are valid.
+
+ If, pursuant to or in connection with a single transaction or
+arrangement, you convey, or propagate by procuring conveyance of, a
+covered work, and grant a patent license to some of the parties
+receiving the covered work authorizing them to use, propagate, modify
+or convey a specific copy of the covered work, then the patent license
+you grant is automatically extended to all recipients of the covered
+work and works based on it.
+
+ A patent license is "discriminatory" if it does not include within
+the scope of its coverage, prohibits the exercise of, or is
+conditioned on the non-exercise of one or more of the rights that are
+specifically granted under this License. You may not convey a covered
+work if you are a party to an arrangement with a third party that is
+in the business of distributing software, under which you make payment
+to the third party based on the extent of your activity of conveying
+the work, and under which the third party grants, to any of the
+parties who would receive the covered work from you, a discriminatory
+patent license (a) in connection with copies of the covered work
+conveyed by you (or copies made from those copies), or (b) primarily
+for and in connection with specific products or compilations that
+contain the covered work, unless you entered into that arrangement,
+or that patent license was granted, prior to 28 March 2007.
+
+ Nothing in this License shall be construed as excluding or limiting
+any implied license or other defenses to infringement that may
+otherwise be available to you under applicable patent law.
+
+ 12. No Surrender of Others' Freedom.
+
+ If conditions are imposed on you (whether by court order, agreement or
+otherwise) that contradict the conditions of this License, they do not
+excuse you from the conditions of this License. If you cannot convey a
+covered work so as to satisfy simultaneously your obligations under this
+License and any other pertinent obligations, then as a consequence you may
+not convey it at all. For example, if you agree to terms that obligate you
+to collect a royalty for further conveying from those to whom you convey
+the Program, the only way you could satisfy both those terms and this
+License would be to refrain entirely from conveying the Program.
+
+ 13. Use with the GNU Affero General Public License.
+
+ Notwithstanding any other provision of this License, you have
+permission to link or combine any covered work with a work licensed
+under version 3 of the GNU Affero General Public License into a single
+combined work, and to convey the resulting work. The terms of this
+License will continue to apply to the part which is the covered work,
+but the special requirements of the GNU Affero General Public License,
+section 13, concerning interaction through a network will apply to the
+combination as such.
+
+ 14. Revised Versions of this License.
+
+ The Free Software Foundation may publish revised and/or new versions of
+the GNU General Public License from time to time. Such new versions will
+be similar in spirit to the present version, but may differ in detail to
+address new problems or concerns.
+
+ Each version is given a distinguishing version number. If the
+Program specifies that a certain numbered version of the GNU General
+Public License "or any later version" applies to it, you have the
+option of following the terms and conditions either of that numbered
+version or of any later version published by the Free Software
+Foundation. If the Program does not specify a version number of the
+GNU General Public License, you may choose any version ever published
+by the Free Software Foundation.
+
+ If the Program specifies that a proxy can decide which future
+versions of the GNU General Public License can be used, that proxy's
+public statement of acceptance of a version permanently authorizes you
+to choose that version for the Program.
+
+ Later license versions may give you additional or different
+permissions. However, no additional obligations are imposed on any
+author or copyright holder as a result of your choosing to follow a
+later version.
+
+ 15. Disclaimer of Warranty.
+
+ THERE IS NO WARRANTY FOR THE PROGRAM, TO THE EXTENT PERMITTED BY
+APPLICABLE LAW. EXCEPT WHEN OTHERWISE STATED IN WRITING THE COPYRIGHT
+HOLDERS AND/OR OTHER PARTIES PROVIDE THE PROGRAM "AS IS" WITHOUT WARRANTY
+OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING, BUT NOT LIMITED TO,
+THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
+PURPOSE. THE ENTIRE RISK AS TO THE QUALITY AND PERFORMANCE OF THE PROGRAM
+IS WITH YOU. SHOULD THE PROGRAM PROVE DEFECTIVE, YOU ASSUME THE COST OF
+ALL NECESSARY SERVICING, REPAIR OR CORRECTION.
+
+ 16. Limitation of Liability.
+
+ IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW OR AGREED TO IN WRITING
+WILL ANY COPYRIGHT HOLDER, OR ANY OTHER PARTY WHO MODIFIES AND/OR CONVEYS
+THE PROGRAM AS PERMITTED ABOVE, BE LIABLE TO YOU FOR DAMAGES, INCLUDING ANY
+GENERAL, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING OUT OF THE
+USE OR INABILITY TO USE THE PROGRAM (INCLUDING BUT NOT LIMITED TO LOSS OF
+DATA OR DATA BEING RENDERED INACCURATE OR LOSSES SUSTAINED BY YOU OR THIRD
+PARTIES OR A FAILURE OF THE PROGRAM TO OPERATE WITH ANY OTHER PROGRAMS),
+EVEN IF SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE POSSIBILITY OF
+SUCH DAMAGES.
+
+ 17. Interpretation of Sections 15 and 16.
+
+ If the disclaimer of warranty and limitation of liability provided
+above cannot be given local legal effect according to their terms,
+reviewing courts shall apply local law that most closely approximates
+an absolute waiver of all civil liability in connection with the
+Program, unless a warranty or assumption of liability accompanies a
+copy of the Program in return for a fee.
+
+ END OF TERMS AND CONDITIONS
+
+ How to Apply These Terms to Your New Programs
+
+ If you develop a new program, and you want it to be of the greatest
+possible use to the public, the best way to achieve this is to make it
+free software which everyone can redistribute and change under these terms.
+
+ To do so, attach the following notices to the program. It is safest
+to attach them to the start of each source file to most effectively
+state the exclusion of warranty; and each file should have at least
+the "copyright" line and a pointer to where the full notice is found.
+
+
+ Copyright (C)
+
+ This program is free software: you can redistribute it and/or modify
+ it under the terms of the GNU General Public License as published by
+ the Free Software Foundation, either version 3 of the License, or
+ (at your option) any later version.
+
+ This program is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
+ GNU General Public License for more details.
+
+ You should have received a copy of the GNU General Public License
+ along with this program. If not, see .
+
+Also add information on how to contact you by electronic and paper mail.
+
+ If the program does terminal interaction, make it output a short
+notice like this when it starts in an interactive mode:
+
+ Copyright (C)
+ This program comes with ABSOLUTELY NO WARRANTY; for details type `show w'.
+ This is free software, and you are welcome to redistribute it
+ under certain conditions; type `show c' for details.
+
+The hypothetical commands `show w' and `show c' should show the appropriate
+parts of the General Public License. Of course, your program's commands
+might be different; for a GUI interface, you would use an "about box".
+
+ You should also get your employer (if you work as a programmer) or school,
+if any, to sign a "copyright disclaimer" for the program, if necessary.
+For more information on this, and how to apply and follow the GNU GPL, see
+.
+
+ The GNU General Public License does not permit incorporating your program
+into proprietary programs. If your program is a subroutine library, you
+may consider it more useful to permit linking proprietary applications with
+the library. If this is what you want to do, use the GNU Lesser General
+Public License instead of this License. But first, please read
+.
diff --git a/yolov7_seg/cls/README.md b/yolov7_seg/cls/README.md
new file mode 100644
index 000000000..ff3812f68
--- /dev/null
+++ b/yolov7_seg/cls/README.md
@@ -0,0 +1,29 @@
+# yolov7
+
+Implementation of "YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors"
+
+This implimentation is based on [yolov5](https://github.com/ultralytics/yolov5).
+
+All of installation, data preparation, and usage are as same as yolov5.
+
+## Training
+
+``` shell
+python classifier.py --pretrained False --data imagenet --epochs 90 --img 224 --batch 256 --model yolov7 --name yolov7-cls --lr0 0.1 --optimizer SGD
+```
+
+## Results
+
+[`yolov7-cls.pt`](https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7-cls.pt)
+
+```
+Top-1: 78.3%
+Top-5: 94.1%
+```
+
+[`yolov7-clsn.pt`](https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7-clsn.pt)
+
+```
+Top-1: 78.2%
+Top-5: 94.3%
+```
diff --git a/yolov7_seg/cls/classifier.py b/yolov7_seg/cls/classifier.py
new file mode 100644
index 000000000..b36112387
--- /dev/null
+++ b/yolov7_seg/cls/classifier.py
@@ -0,0 +1,433 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Train a YOLOv5 classifier model on a classification dataset
+
+Usage - train:
+ $ python classifier.py --model yolov5s --data cifar100 --epochs 5 --img 224 --batch 128
+ $ python -m torch.distributed.run --nproc_per_node 4 --master_port 1 classifier.py --model yolov5s --data imagenet --epochs 5 --img 224 --device 4,5,6,7
+
+Usage - inference:
+ from classifier import *
+
+ model = torch.load('path/to/best.pt', map_location=torch.device('cpu'))['model'].float()
+ files = Path('../datasets/mnist/test/7').glob('*.png') # images from dir
+ for f in list(files)[:10]: # first 10 images
+ classify(model, size=128, file=f)
+"""
+
+import argparse
+import math
+import os
+import subprocess
+import sys
+import time
+from copy import deepcopy
+from datetime import datetime
+from pathlib import Path
+
+import torch
+import torch.distributed as dist
+import torch.hub as hub
+import torch.nn as nn
+import torch.optim.lr_scheduler as lr_scheduler
+import torchvision
+from torch.cuda import amp
+from tqdm import tqdm
+from models.yolo import Model
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from utils.augmentations import denormalize, normalize
+from utils.dataloaders import create_classification_dataloader
+from utils.general import (LOGGER, check_git_status, check_requirements, colorstr, download, emojis, increment_path,
+ init_seeds, print_args)
+from utils.loggers import GenericLogger
+from utils.torch_utils import (ModelEMA, model_info, select_device, smart_DDP, smart_hub_load, smart_optimizer,
+ torch_distributed_zero_first, update_classifier_model)
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+
+def train(opt, device):
+ init_seeds(opt.seed + 1 + RANK, deterministic=True)
+ save_dir, data, bs, epochs, nw, imgsz, pretrained = \
+ Path(opt.save_dir), Path(opt.data), opt.batch_size, opt.epochs, min(os.cpu_count() - 1, opt.workers), \
+ opt.imgsz, str(opt.pretrained).lower() == 'true'
+ cuda = device.type != 'cpu'
+
+ # Directories
+ wdir = save_dir / 'weights'
+ wdir.mkdir(parents=True, exist_ok=True) # make dir
+ last, best = wdir / 'last.pt', wdir / 'best.pt'
+
+ # Logger
+ logger = GenericLogger(opt=opt, console_logger=LOGGER) if RANK in {-1, 0} else None
+
+ # Download Dataset
+ with torch_distributed_zero_first(LOCAL_RANK):
+ data_dir = data if data.is_dir() else (FILE.parents[1] / 'datasets' / data)
+ if not data_dir.is_dir():
+ LOGGER.info(emojis(f'\nDataset not found ⚠️, missing path {data_dir}, attempting download...'))
+ t = time.time()
+ if data == 'imagenet':
+ subprocess.run(f"bash {ROOT / 'data/scripts/get_imagenet.sh'}", shell=True, check=True)
+ else:
+ url = f'https://github.com/ultralytics/yolov5/releases/download/v1.0/{data}.zip'
+ download(url, dir=data_dir.parent)
+ s = f"Dataset download success ✅ ({time.time() - t:.1f}s), saved to {colorstr('bold', data_dir)}\n"
+ LOGGER.info(emojis(s))
+
+ # Dataloaders
+ nc = len([x for x in (data_dir / 'train').glob('*') if x.is_dir()]) # number of classes
+ trainloader = create_classification_dataloader(path=data_dir / 'train',
+ imgsz=imgsz,
+ batch_size=bs // WORLD_SIZE,
+ augment=True,
+ cache=opt.cache,
+ rank=LOCAL_RANK,
+ workers=nw)
+
+ test_dir = data_dir / 'test' if (data_dir / 'test').exists() else data_dir / 'val' # data/test or data/val
+ if RANK in {-1, 0}:
+ testloader = create_classification_dataloader(path=test_dir,
+ imgsz=imgsz,
+ batch_size=bs // WORLD_SIZE * 2,
+ augment=False,
+ cache=opt.cache,
+ rank=-1,
+ workers=nw)
+
+ # Initialize
+ names = trainloader.dataset.classes # class names
+ LOGGER.info(f'Training {opt.model} on {data} dataset with {nc} classes...')
+
+ # Model
+ repo1, repo2 = 'ultralytics/yolov5', 'pytorch/vision'
+ with torch_distributed_zero_first(LOCAL_RANK):
+ if opt.model == 'list':
+ m = hub.list(repo1) + hub.list(repo2) # models
+ LOGGER.info('\nAvailable models. Usage: python classifier.py --model MODEL\n' + '\n'.join(m))
+ return
+ elif opt.model.startswith('yolov5'): # YOLOv5 models, i.e. yolov5s, yolov5m
+ from models.yolo import ClassificationModel
+ #model = smart_hub_load(repo1,
+ # opt.model,
+ # pretrained=pretrained,
+ # _verbose=False,
+ # autoshape=False,
+ # device='cpu') # detection model
+ model = Model('models/yolov5l.yaml', ch=3, nc=80, anchors=3).to(device)
+ model = ClassificationModel(model=model, nc=nc, cutoff=opt.cutoff or 10) # classification model
+ #print(model)
+ elif opt.model.startswith('yolov7'): # YOLOv5 models, i.e. yolov5s, yolov5m
+ from models.yolo import ClassificationModel
+ model = Model('models/yolov7.yaml', ch=3, nc=80, anchors=3).to(device)
+ #print(model.save)
+ model = ClassificationModel(model=model, nc=nc, cutoff=opt.cutoff or 52) # classification model
+ #model = ClassificationModel(model=model, nc=nc, cutoff=opt.cutoff or 52) # classification model
+ #print(model)
+ elif opt.model in torchvision.models.__dict__: # TorchVision models i.e. resnet50, efficientnet_b0
+ model = torchvision.models.__dict__[opt.model](weights='IMAGENET1K_V1' if pretrained else None)
+ update_classifier_model(model, nc) # update class count
+ else:
+ m = hub.list(repo1) + hub.list(repo2) # models
+ raise ModuleNotFoundError(f'--model {opt.model} not found. Available models are: \n' + '\n'.join(m))
+ for p in model.parameters():
+ p.requires_grad = True # for training
+ for m in model.modules():
+ if isinstance(m, torch.nn.Dropout) and opt.dropout is not None:
+ m.p = opt.dropout # set dropout
+ model = model.to(device)
+ model.names = names # attach class names
+
+ # Info
+ if RANK in {-1, 0}:
+ model_info(model)
+ if opt.verbose:
+ LOGGER.info(model)
+ images, labels = next(iter(trainloader))
+ file = imshow(denormalize(images[:25]), labels[:25], names=names, f=save_dir / 'train_images.jpg')
+ logger.log_images(file, name='Train Examples')
+ logger.log_graph(model, imgsz) # log model
+
+ # Optimizer
+ optimizer = smart_optimizer(model, opt.optimizer, opt.lr0, momentum=0.9, decay=5e-5)
+
+ # Scheduler
+ lrf = 0.01 # final lr (fraction of lr0)
+ # lf = lambda x: ((1 + math.cos(x * math.pi / epochs)) / 2) * (1 - lrf) + lrf # cosine
+ lf = lambda x: (1 - x / epochs) * (1 - lrf) + lrf # linear
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
+ # scheduler = lr_scheduler.OneCycleLR(optimizer, max_lr=lr0, total_steps=epochs, pct_start=0.1,
+ # final_div_factor=1 / 25 / lrf)
+
+ # EMA
+ ema = ModelEMA(model) if RANK in {-1, 0} else None
+
+ # DDP mode
+ if cuda and RANK != -1:
+ model = smart_DDP(model)
+
+ # Train
+ t0 = time.time()
+ criterion = nn.CrossEntropyLoss(label_smoothing=opt.label_smoothing) # loss function
+ best_fitness = 0.0
+ scaler = amp.GradScaler(enabled=cuda)
+ val = test_dir.stem # 'val' or 'test'
+ LOGGER.info(f'Image sizes {imgsz} train, {imgsz} test\n'
+ f'Using {nw * WORLD_SIZE} dataloader workers\n'
+ f"Logging results to {colorstr('bold', save_dir)}\n"
+ f'Starting training for {epochs} epochs...\n\n'
+ f"{'Epoch':>10}{'GPU_mem':>10}{'train_loss':>12}{f'{val}_loss':>12}{'top1_acc':>12}{'top5_acc':>12}")
+ for epoch in range(epochs): # loop over the dataset multiple times
+ tloss, vloss, fitness = 0.0, 0.0, 0.0 # train loss, val loss, fitness
+ model.train()
+ if RANK != -1:
+ trainloader.sampler.set_epoch(epoch)
+ pbar = enumerate(trainloader)
+ if RANK in {-1, 0}:
+ pbar = tqdm(enumerate(trainloader), total=len(trainloader), bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}')
+ for i, (images, labels) in pbar: # progress bar
+ images, labels = images.to(device, non_blocking=True), labels.to(device)
+
+ # Forward
+ with amp.autocast(enabled=cuda): # stability issues when enabled
+ loss = criterion(model(images), labels)
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize
+ scaler.unscale_(optimizer) # unscale gradients
+ torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=10.0) # clip gradients
+ scaler.step(optimizer)
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+
+ if RANK in {-1, 0}:
+ # Print
+ tloss = (tloss * i + loss.item()) / (i + 1) # update mean losses
+ mem = '%.3gG' % (torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0) # (GB)
+ pbar.desc = f"{f'{epoch + 1}/{epochs}':>10}{mem:>10}{tloss:>12.3g}" + ' ' * 36
+
+ # Test
+ if i == len(pbar) - 1: # last batch
+ top1, top5, vloss = test(ema.ema, testloader, names, criterion, pbar=pbar) # test accuracy, loss
+ fitness = top1 # define fitness as top1 accuracy
+
+ # Scheduler
+ scheduler.step()
+
+ # Log metrics
+ if RANK in {-1, 0}:
+ # Best fitness
+ if fitness > best_fitness:
+ best_fitness = fitness
+
+ # Log
+ metrics = {
+ "train/loss": tloss,
+ f"{val}/loss": vloss,
+ "metrics/accuracy_top1": top1,
+ "metrics/accuracy_top5": top5,
+ "lr/0": optimizer.param_groups[0]['lr']} # learning rate
+ logger.log_metrics(metrics, epoch)
+
+ # Save model
+ final_epoch = epoch + 1 == epochs
+ if (not opt.nosave) or final_epoch:
+ ckpt = {
+ 'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'model': deepcopy(ema.ema).half(), # deepcopy(de_parallel(model)).half(),
+ 'ema': None, # deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': None, # optimizer.state_dict(),
+ 'date': datetime.now().isoformat()}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fitness:
+ torch.save(ckpt, best)
+ del ckpt
+
+ # Train complete
+ if RANK in {-1, 0} and final_epoch:
+ LOGGER.info(f'\nTraining complete {(time.time() - t0) / 3600:.3f} hours.'
+ f"\nResults saved to {colorstr('bold', save_dir)}")
+
+ # Show predictions
+ images, labels = (x[:25] for x in next(iter(testloader))) # first 25 images and labels
+ pred = torch.max(ema.ema(images.to(device)), 1)[1]
+ file = imshow(denormalize(images), labels, pred, names, verbose=True, f=save_dir / 'test_images.jpg')
+ meta = {"epochs": epochs, "top1_acc": best_fitness, "date": datetime.now().isoformat()}
+ logger.log_images(file, name='Test Examples (true-predicted)', epoch=epoch)
+ logger.log_model(best, epochs, metadata=meta)
+
+
+@torch.no_grad()
+def test(model, dataloader, names, criterion=None, verbose=False, pbar=None):
+ model.eval()
+ device = next(model.parameters()).device
+ pred, targets, loss = [], [], 0
+ n = len(dataloader) # number of batches
+ action = 'validating' if dataloader.dataset.root.stem == 'val' else 'testing'
+ desc = f"{pbar.desc[:-36]}{action:>36}"
+ bar = tqdm(dataloader, desc, n, False, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}', position=0)
+ with amp.autocast(enabled=device.type != 'cpu'):
+ for images, labels in bar:
+ images, labels = images.to(device, non_blocking=True), labels.to(device)
+ y = model(images)
+ pred.append(y.argsort(1, descending=True)[:, :5])
+ targets.append(labels)
+ if criterion:
+ loss += criterion(y, labels)
+
+ loss /= n
+ pred, targets = torch.cat(pred), torch.cat(targets)
+ correct = (targets[:, None] == pred).float()
+ acc = torch.stack((correct[:, 0], correct.max(1).values), dim=1) # (top1, top5) accuracy
+ top1, top5 = acc.mean(0).tolist()
+
+ if pbar:
+ pbar.desc = f"{pbar.desc[:-36]}{loss:>12.3g}{top1:>12.3g}{top5:>12.3g}"
+ if verbose: # all classes
+ LOGGER.info(f"{'Class':>20}{'Images':>12}{'top1_acc':>12}{'top5_acc':>12}")
+ LOGGER.info(f"{'all':>20}{targets.shape[0]:>12}{top1:>12.3g}{top5:>12.3g}")
+ for i, c in enumerate(names):
+ aci = acc[targets == i]
+ top1i, top5i = aci.mean(0).tolist()
+ LOGGER.info(f"{c:>20}{aci.shape[0]:>12}{top1i:>12.3g}{top5i:>12.3g}")
+
+ return top1, top5, loss
+
+
+@torch.no_grad()
+def classify(model, size=128, file='../datasets/mnist/test/3/30.png', plot=False):
+ # YOLOv5 classification model inference
+ import cv2
+ import numpy as np
+ import torch.nn.functional as F
+
+ resize = torch.nn.Upsample(size=(size, size), mode='bilinear', align_corners=False) # image resize
+
+ # Image
+ im = cv2.imread(str(file))[..., ::-1] # HWC, BGR to RGB
+ im = np.ascontiguousarray(np.asarray(im).transpose((2, 0, 1))) # HWC to CHW
+ im = torch.tensor(im).float().unsqueeze(0) / 255.0 # to Tensor, to BCWH, rescale
+ im = resize(im)
+
+ # Inference
+ results = model(normalize(im))
+ p = F.softmax(results, dim=1) # probabilities
+ i = p.argmax() # max index
+ LOGGER.info(f'{file} prediction: {i} ({p[0, i]:.2f})')
+
+ # Plot
+ if plot:
+ imshow(im, f=Path(file).name)
+
+ return p
+
+
+def imshow(img, labels=None, pred=None, names=None, nmax=25, verbose=False, f=Path('images.jpg')):
+ # Show classification image grid with labels (optional) and predictions (optional)
+ import matplotlib.pyplot as plt
+
+ names = names or [f'class{i}' for i in range(1000)]
+ blocks = torch.chunk(img.cpu(), len(img), dim=0) # select batch index 0, block by channels
+ n = min(len(blocks), nmax) # number of plots
+ m = min(8, round(n ** 0.5)) # 8 x 8 default
+ fig, ax = plt.subplots(math.ceil(n / m), m) # 8 rows x n/8 cols
+ ax = ax.ravel() if m > 1 else [ax]
+ # plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze().permute((1, 2, 0)).numpy().clip(0.0, 1.0))
+ ax[i].axis('off')
+ if labels is not None:
+ s = names[labels[i]] + (f'—{names[pred[i]]}' if pred is not None else '')
+ ax[i].set_title(s, fontsize=8, verticalalignment='top')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ LOGGER.info(colorstr('imshow: ') + f"examples saved to {f}")
+ if verbose:
+ if labels is not None:
+ LOGGER.info('True: ' + ' '.join(f'{names[i]:3s}' for i in labels[:nmax]))
+ if pred is not None:
+ LOGGER.info('Predicted:' + ' '.join(f'{names[i]:3s}' for i in pred[:nmax]))
+ return f
+
+
+def parse_opt(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--model', type=str, default='yolov5s', help='initial weights path')
+ parser.add_argument('--data', type=str, default='mnist', help='cifar10, cifar100, mnist or fashion-mnist')
+ parser.add_argument('--epochs', type=int, default=90)
+ parser.add_argument('--batch-size', type=int, default=64, help='total batch size for all GPUs')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=224, help='train, val image size (pixels)')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default='runs/train', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--pretrained', nargs='?', const=True, default=True, help='start from i.e. --pretrained False')
+ parser.add_argument('--optimizer', choices=['SGD', 'Adam', 'AdamW', 'RMSProp'], default='Adam', help='optimizer')
+ parser.add_argument('--lr0', type=float, default=0.001, help='initial learning rate')
+ parser.add_argument('--label-smoothing', type=float, default=0.1, help='Label smoothing epsilon')
+ parser.add_argument('--cutoff', type=int, default=None, help='Model layer cutoff index for Classify() head')
+ parser.add_argument('--dropout', type=float, default=None, help='Dropout (fraction)')
+ parser.add_argument('--verbose', action='store_true', help='Verbose mode')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def main(opt):
+ # Checks
+ if RANK in {-1, 0}:
+ print_args(vars(opt))
+ #check_git_status()
+ #check_requirements()
+
+ # DDP mode
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if LOCAL_RANK != -1:
+ assert opt.batch_size != -1, 'AutoBatch is coming soon for classification, please pass a valid --batch-size'
+ assert opt.batch_size % WORLD_SIZE == 0, f'--batch-size {opt.batch_size} must be multiple of WORLD_SIZE'
+ assert torch.cuda.device_count() > LOCAL_RANK, 'insufficient CUDA devices for DDP command'
+ torch.cuda.set_device(LOCAL_RANK)
+ device = torch.device('cuda', LOCAL_RANK)
+ dist.init_process_group(backend="nccl" if dist.is_nccl_available() else "gloo")
+
+ # Parameters
+ opt.save_dir = increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok) # increment run
+
+ # Train
+ train(opt, device)
+ if WORLD_SIZE > 1 and RANK == 0:
+ LOGGER.info('Destroying process group... ')
+ dist.destroy_process_group()
+
+
+def run(**kwargs):
+ # Usage: import classifier; classifier.run(data=mnist, imgsz=320, model='yolov5m')
+ opt = parse_opt(True)
+ for k, v in kwargs.items():
+ setattr(opt, k, v)
+ main(opt)
+ return opt
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/cls/data/hyps/hyp.scratch-high.yaml b/yolov7_seg/cls/data/hyps/hyp.scratch-high.yaml
new file mode 100644
index 000000000..9ba0d0826
--- /dev/null
+++ b/yolov7_seg/cls/data/hyps/hyp.scratch-high.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for high-augmentation COCO training from scratch
+# python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.3 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 0.7 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.9 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.1 # image mixup (probability)
+copy_paste: 0.1 # segment copy-paste (probability)
diff --git a/yolov7_seg/cls/data/hyps/hyp.scratch-low.yaml b/yolov7_seg/cls/data/hyps/hyp.scratch-low.yaml
new file mode 100644
index 000000000..dcf0f6495
--- /dev/null
+++ b/yolov7_seg/cls/data/hyps/hyp.scratch-low.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for low-augmentation COCO training from scratch
+# python train.py --batch 64 --cfg yolov5n6.yaml --weights '' --data coco.yaml --img 640 --epochs 300 --linear
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.01 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.5 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 1.0 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.5 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.0 # image mixup (probability)
+copy_paste: 0.0 # segment copy-paste (probability)
diff --git a/yolov7_seg/cls/data/hyps/hyp.scratch-med.yaml b/yolov7_seg/cls/data/hyps/hyp.scratch-med.yaml
new file mode 100644
index 000000000..6dcfc2dc1
--- /dev/null
+++ b/yolov7_seg/cls/data/hyps/hyp.scratch-med.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for medium-augmentation COCO training from scratch
+# python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.3 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 0.7 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.9 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.1 # image mixup (probability)
+copy_paste: 0.0 # segment copy-paste (probability)
diff --git a/yolov7_seg/cls/data/scripts/get_coco.sh b/yolov7_seg/cls/data/scripts/get_coco.sh
new file mode 100644
index 000000000..be3cae83f
--- /dev/null
+++ b/yolov7_seg/cls/data/scripts/get_coco.sh
@@ -0,0 +1,27 @@
+#!/bin/bash
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Download COCO 2017 dataset http://cocodataset.org
+# Example usage: bash data/scripts/get_coco.sh
+# parent
+# ├── yolov5
+# └── datasets
+# └── coco ← downloads here
+
+# Download/unzip labels
+d='../datasets' # unzip directory
+url=https://github.com/ultralytics/yolov5/releases/download/v1.0/
+f='coco2017labels.zip' # or 'coco2017labels-segments.zip', 68 MB
+echo 'Downloading' $url$f ' ...'
+curl -L $url$f -o $f && unzip -q $f -d $d && rm $f &
+
+# Download/unzip images
+d='../datasets/coco/images' # unzip directory
+url=http://images.cocodataset.org/zips/
+f1='train2017.zip' # 19G, 118k images
+f2='val2017.zip' # 1G, 5k images
+f3='test2017.zip' # 7G, 41k images (optional)
+for f in $f1 $f2; do
+ echo 'Downloading' $url$f '...'
+ curl -L $url$f -o $f && unzip -q $f -d $d && rm $f &
+done
+wait # finish background tasks
diff --git a/yolov7_seg/cls/data/scripts/get_imagenet.sh b/yolov7_seg/cls/data/scripts/get_imagenet.sh
new file mode 100644
index 000000000..655eaf5fe
--- /dev/null
+++ b/yolov7_seg/cls/data/scripts/get_imagenet.sh
@@ -0,0 +1,34 @@
+#!/bin/bash
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Download ILSVRC2012 ImageNet dataset https://image-net.org
+# Example usage: bash data/scripts/get_imagenet.sh
+# parent
+# ├── yolov5
+# └── datasets
+# └── imagenet ← downloads here
+
+# Download
+d='../datasets/imagenet' # unzip directory
+mkdir -p $d && cd $d
+wget https://image-net.org/data/ILSVRC/2012/ILSVRC2012_img_val.tar # 6.3G, 50000 images
+wget https://image-net.org/data/ILSVRC/2012/ILSVRC2012_img_train.tar # 138G, 1281167 images
+
+# Extract train
+mkdir train && mv ILSVRC2012_img_train.tar train/ && cd train
+tar -xvf ILSVRC2012_img_train.tar && rm -f ILSVRC2012_img_train.tar
+find . -name "*.tar" | while read NAME; do
+ mkdir -p "${NAME%.tar}"
+ tar -xvf "${NAME}" -C "${NAME%.tar}"
+ rm -f "${NAME}"
+done
+cd ..
+
+# Extract val and move images into subdirectories
+mkdir val && mv ILSVRC2012_img_val.tar val/ && cd val && tar -xvf ILSVRC2012_img_val.tar
+wget -qO- https://raw.githubusercontent.com/soumith/imagenetloader.torch/master/valprep.sh | bash
+
+# Delete corrupted image (optional: PNG under JPEG name that may cause dataloaders to fail)
+# rm train/n04266014/n04266014_10835.JPEG
+
+# TFRecords (optional)
+# wget https://raw.githubusercontent.com/tensorflow/models/master/research/slim/datasets/imagenet_lsvrc_2015_synsets.txt
diff --git a/yolov7_seg/cls/detect.py b/yolov7_seg/cls/detect.py
new file mode 100644
index 000000000..dfd70933c
--- /dev/null
+++ b/yolov7_seg/cls/detect.py
@@ -0,0 +1,257 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run inference on images, videos, directories, streams, etc.
+
+Usage - sources:
+ $ python path/to/detect.py --weights yolov5s.pt --source 0 # webcam
+ img.jpg # image
+ vid.mp4 # video
+ path/ # directory
+ path/*.jpg # glob
+ 'https://youtu.be/Zgi9g1ksQHc' # YouTube
+ 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
+
+Usage - formats:
+ $ python path/to/detect.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import os
+import platform
+import sys
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.dataloaders import IMG_FORMATS, VID_FORMATS, LoadImages, LoadStreams
+from utils.general import (LOGGER, check_file, check_img_size, check_imshow, check_requirements, colorstr, cv2,
+ increment_path, non_max_suppression, print_args, scale_coords, strip_optimizer, xyxy2xywh)
+from utils.plots import Annotator, colors, save_one_box
+from utils.torch_utils import select_device, time_sync
+
+
+@torch.no_grad()
+def run(
+ weights=ROOT / 'yolov5s.pt', # model.pt path(s)
+ source=ROOT / 'data/images', # file/dir/URL/glob, 0 for webcam
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ imgsz=(640, 640), # inference size (height, width)
+ conf_thres=0.25, # confidence threshold
+ iou_thres=0.45, # NMS IOU threshold
+ max_det=1000, # maximum detections per image
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ view_img=False, # show results
+ save_txt=False, # save results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_crop=False, # save cropped prediction boxes
+ nosave=False, # do not save images/videos
+ classes=None, # filter by class: --class 0, or --class 0 2 3
+ agnostic_nms=False, # class-agnostic NMS
+ augment=False, # augmented inference
+ visualize=False, # visualize features
+ update=False, # update all models
+ project=ROOT / 'runs/detect', # save results to project/name
+ name='exp', # save results to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ line_thickness=3, # bounding box thickness (pixels)
+ hide_labels=False, # hide labels
+ hide_conf=False, # hide confidences
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+):
+ source = str(source)
+ save_img = not nosave and not source.endswith('.txt') # save inference images
+ is_file = Path(source).suffix[1:] in (IMG_FORMATS + VID_FORMATS)
+ is_url = source.lower().startswith(('rtsp://', 'rtmp://', 'http://', 'https://'))
+ webcam = source.isnumeric() or source.endswith('.txt') or (is_url and not is_file)
+ if is_url and is_file:
+ source = check_file(source) # download
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ device = select_device(device)
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, names, pt = model.stride, model.names, model.pt
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+
+ # Dataloader
+ if webcam:
+ view_img = check_imshow()
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride, auto=pt)
+ bs = len(dataset) # batch_size
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt)
+ bs = 1 # batch_size
+ vid_path, vid_writer = [None] * bs, [None] * bs
+
+ # Run inference
+ model.warmup(imgsz=(1 if pt else bs, 3, *imgsz)) # warmup
+ seen, windows, dt = 0, [], [0.0, 0.0, 0.0]
+ for path, im, im0s, vid_cap, s in dataset:
+ t1 = time_sync()
+ im = torch.from_numpy(im).to(device)
+ im = im.half() if model.fp16 else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ if len(im.shape) == 3:
+ im = im[None] # expand for batch dim
+ t2 = time_sync()
+ dt[0] += t2 - t1
+
+ # Inference
+ visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False
+ pred = model(im, augment=augment, visualize=visualize)
+ t3 = time_sync()
+ dt[1] += t3 - t2
+
+ # NMS
+ pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det)
+ dt[2] += time_sync() - t3
+
+ # Second-stage classifier (optional)
+ # pred = utils.general.apply_classifier(pred, classifier_model, im, im0s)
+
+ # Process predictions
+ for i, det in enumerate(pred): # per image
+ seen += 1
+ if webcam: # batch_size >= 1
+ p, im0, frame = path[i], im0s[i].copy(), dataset.count
+ s += f'{i}: '
+ else:
+ p, im0, frame = path, im0s.copy(), getattr(dataset, 'frame', 0)
+
+ p = Path(p) # to Path
+ save_path = str(save_dir / p.name) # im.jpg
+ txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # im.txt
+ s += '%gx%g ' % im.shape[2:] # print string
+ gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
+ imc = im0.copy() if save_crop else im0 # for save_crop
+ annotator = Annotator(im0, line_width=line_thickness, example=str(names))
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(im.shape[2:], det[:, :4], im0.shape).round()
+
+ # Print results
+ for c in det[:, -1].unique():
+ n = (det[:, -1] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ if save_txt: # Write to file
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(f'{txt_path}.txt', 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+ if save_img or save_crop or view_img: # Add bbox to image
+ c = int(cls) # integer class
+ label = None if hide_labels else (names[c] if hide_conf else f'{names[c]} {conf:.2f}')
+ annotator.box_label(xyxy, label, color=colors(c, True))
+ if save_crop:
+ save_one_box(xyxy, imc, file=save_dir / 'crops' / names[c] / f'{p.stem}.jpg', BGR=True)
+
+ # Stream results
+ im0 = annotator.result()
+ if view_img:
+ if platform.system() == 'Linux' and p not in windows:
+ windows.append(p)
+ cv2.namedWindow(str(p), cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO) # allow window resize (Linux)
+ cv2.resizeWindow(str(p), im0.shape[1], im0.shape[0])
+ cv2.imshow(str(p), im0)
+ cv2.waitKey(1) # 1 millisecond
+
+ # Save results (image with detections)
+ if save_img:
+ if dataset.mode == 'image':
+ cv2.imwrite(save_path, im0)
+ else: # 'video' or 'stream'
+ if vid_path[i] != save_path: # new video
+ vid_path[i] = save_path
+ if isinstance(vid_writer[i], cv2.VideoWriter):
+ vid_writer[i].release() # release previous video writer
+ if vid_cap: # video
+ fps = vid_cap.get(cv2.CAP_PROP_FPS)
+ w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ else: # stream
+ fps, w, h = 30, im0.shape[1], im0.shape[0]
+ save_path = str(Path(save_path).with_suffix('.mp4')) # force *.mp4 suffix on results videos
+ vid_writer[i] = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
+ vid_writer[i].write(im0)
+
+ # Print time (inference-only)
+ LOGGER.info(f'{s}Done. ({t3 - t2:.3f}s)')
+
+ # Print results
+ t = tuple(x / seen * 1E3 for x in dt) # speeds per image
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {(1, 3, *imgsz)}' % t)
+ if save_txt or save_img:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ if update:
+ strip_optimizer(weights[0]) # update model (to fix SourceChangeWarning)
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)')
+ parser.add_argument('--source', type=str, default=ROOT / 'data/images', help='file/dir/URL/glob, 0 for webcam')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='(optional) dataset.yaml path')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=1000, help='maximum detections per image')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--view-img', action='store_true', help='show results')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-crop', action='store_true', help='save cropped prediction boxes')
+ parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
+ parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --classes 0, or --classes 0 2 3')
+ parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--visualize', action='store_true', help='visualize features')
+ parser.add_argument('--update', action='store_true', help='update all models')
+ parser.add_argument('--project', default=ROOT / 'runs/detect', help='save results to project/name')
+ parser.add_argument('--name', default='exp', help='save results to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--line-thickness', default=3, type=int, help='bounding box thickness (pixels)')
+ parser.add_argument('--hide-labels', default=False, action='store_true', help='hide labels')
+ parser.add_argument('--hide-conf', default=False, action='store_true', help='hide confidences')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/cls/export.py b/yolov7_seg/cls/export.py
new file mode 100644
index 000000000..ea5702e02
--- /dev/null
+++ b/yolov7_seg/cls/export.py
@@ -0,0 +1,618 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Export a YOLOv5 PyTorch model to other formats. TensorFlow exports authored by https://github.com/zldrobit
+
+Format | `export.py --include` | Model
+--- | --- | ---
+PyTorch | - | yolov5s.pt
+TorchScript | `torchscript` | yolov5s.torchscript
+ONNX | `onnx` | yolov5s.onnx
+OpenVINO | `openvino` | yolov5s_openvino_model/
+TensorRT | `engine` | yolov5s.engine
+CoreML | `coreml` | yolov5s.mlmodel
+TensorFlow SavedModel | `saved_model` | yolov5s_saved_model/
+TensorFlow GraphDef | `pb` | yolov5s.pb
+TensorFlow Lite | `tflite` | yolov5s.tflite
+TensorFlow Edge TPU | `edgetpu` | yolov5s_edgetpu.tflite
+TensorFlow.js | `tfjs` | yolov5s_web_model/
+
+Requirements:
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu # CPU
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime-gpu openvino-dev tensorflow # GPU
+
+Usage:
+ $ python path/to/export.py --weights yolov5s.pt --include torchscript onnx openvino engine coreml tflite ...
+
+Inference:
+ $ python path/to/detect.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+
+TensorFlow.js:
+ $ cd .. && git clone https://github.com/zldrobit/tfjs-yolov5-example.git && cd tfjs-yolov5-example
+ $ npm install
+ $ ln -s ../../yolov5/yolov5s_web_model public/yolov5s_web_model
+ $ npm start
+"""
+
+import argparse
+import json
+import os
+import platform
+import subprocess
+import sys
+import time
+import warnings
+from pathlib import Path
+
+import pandas as pd
+import torch
+import yaml
+from torch.utils.mobile_optimizer import optimize_for_mobile
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+if platform.system() != 'Windows':
+ ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.experimental import attempt_load
+from models.yolo import Detect
+from utils.dataloaders import LoadImages
+from utils.general import (LOGGER, check_dataset, check_img_size, check_requirements, check_version, check_yaml,
+ colorstr, file_size, print_args, url2file)
+from utils.torch_utils import select_device
+
+
+def export_formats():
+ # YOLOv5 export formats
+ x = [
+ ['PyTorch', '-', '.pt', True, True],
+ ['TorchScript', 'torchscript', '.torchscript', True, True],
+ ['ONNX', 'onnx', '.onnx', True, True],
+ ['OpenVINO', 'openvino', '_openvino_model', True, False],
+ ['TensorRT', 'engine', '.engine', False, True],
+ ['CoreML', 'coreml', '.mlmodel', True, False],
+ ['TensorFlow SavedModel', 'saved_model', '_saved_model', True, True],
+ ['TensorFlow GraphDef', 'pb', '.pb', True, True],
+ ['TensorFlow Lite', 'tflite', '.tflite', True, False],
+ ['TensorFlow Edge TPU', 'edgetpu', '_edgetpu.tflite', False, False],
+ ['TensorFlow.js', 'tfjs', '_web_model', False, False],]
+ return pd.DataFrame(x, columns=['Format', 'Argument', 'Suffix', 'CPU', 'GPU'])
+
+
+def export_torchscript(model, im, file, optimize, prefix=colorstr('TorchScript:')):
+ # YOLOv5 TorchScript model export
+ try:
+ LOGGER.info(f'\n{prefix} starting export with torch {torch.__version__}...')
+ f = file.with_suffix('.torchscript')
+
+ ts = torch.jit.trace(model, im, strict=False)
+ d = {"shape": im.shape, "stride": int(max(model.stride)), "names": model.names}
+ extra_files = {'config.txt': json.dumps(d)} # torch._C.ExtraFilesMap()
+ if optimize: # https://pytorch.org/tutorials/recipes/mobile_interpreter.html
+ optimize_for_mobile(ts)._save_for_lite_interpreter(str(f), _extra_files=extra_files)
+ else:
+ ts.save(str(f), _extra_files=extra_files)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'{prefix} export failure: {e}')
+
+
+def export_onnx(model, im, file, opset, train, dynamic, simplify, prefix=colorstr('ONNX:')):
+ # YOLOv5 ONNX export
+ try:
+ check_requirements(('onnx',))
+ import onnx
+
+ LOGGER.info(f'\n{prefix} starting export with onnx {onnx.__version__}...')
+ f = file.with_suffix('.onnx')
+
+ torch.onnx.export(
+ model.cpu() if dynamic else model, # --dynamic only compatible with cpu
+ im.cpu() if dynamic else im,
+ f,
+ verbose=False,
+ opset_version=opset,
+ training=torch.onnx.TrainingMode.TRAINING if train else torch.onnx.TrainingMode.EVAL,
+ do_constant_folding=not train,
+ input_names=['images'],
+ output_names=['output'],
+ dynamic_axes={
+ 'images': {
+ 0: 'batch',
+ 2: 'height',
+ 3: 'width'}, # shape(1,3,640,640)
+ 'output': {
+ 0: 'batch',
+ 1: 'anchors'} # shape(1,25200,85)
+ } if dynamic else None)
+
+ # Checks
+ model_onnx = onnx.load(f) # load onnx model
+ onnx.checker.check_model(model_onnx) # check onnx model
+
+ # Metadata
+ d = {'stride': int(max(model.stride)), 'names': model.names}
+ for k, v in d.items():
+ meta = model_onnx.metadata_props.add()
+ meta.key, meta.value = k, str(v)
+ onnx.save(model_onnx, f)
+
+ # Simplify
+ if simplify:
+ try:
+ cuda = torch.cuda.is_available()
+ check_requirements(('onnxruntime-gpu' if cuda else 'onnxruntime', 'onnx-simplifier>=0.4.1'))
+ import onnxsim
+
+ LOGGER.info(f'{prefix} simplifying with onnx-simplifier {onnxsim.__version__}...')
+ model_onnx, check = onnxsim.simplify(model_onnx)
+ assert check, 'assert check failed'
+ onnx.save(model_onnx, f)
+ except Exception as e:
+ LOGGER.info(f'{prefix} simplifier failure: {e}')
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'{prefix} export failure: {e}')
+
+
+def export_openvino(model, file, half, prefix=colorstr('OpenVINO:')):
+ # YOLOv5 OpenVINO export
+ try:
+ check_requirements(('openvino-dev',)) # requires openvino-dev: https://pypi.org/project/openvino-dev/
+ import openvino.inference_engine as ie
+
+ LOGGER.info(f'\n{prefix} starting export with openvino {ie.__version__}...')
+ f = str(file).replace('.pt', f'_openvino_model{os.sep}')
+
+ cmd = f"mo --input_model {file.with_suffix('.onnx')} --output_dir {f} --data_type {'FP16' if half else 'FP32'}"
+ subprocess.check_output(cmd.split()) # export
+ with open(Path(f) / file.with_suffix('.yaml').name, 'w') as g:
+ yaml.dump({'stride': int(max(model.stride)), 'names': model.names}, g) # add metadata.yaml
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_coreml(model, im, file, int8, half, prefix=colorstr('CoreML:')):
+ # YOLOv5 CoreML export
+ try:
+ check_requirements(('coremltools',))
+ import coremltools as ct
+
+ LOGGER.info(f'\n{prefix} starting export with coremltools {ct.__version__}...')
+ f = file.with_suffix('.mlmodel')
+
+ ts = torch.jit.trace(model, im, strict=False) # TorchScript model
+ ct_model = ct.convert(ts, inputs=[ct.ImageType('image', shape=im.shape, scale=1 / 255, bias=[0, 0, 0])])
+ bits, mode = (8, 'kmeans_lut') if int8 else (16, 'linear') if half else (32, None)
+ if bits < 32:
+ if platform.system() == 'Darwin': # quantization only supported on macOS
+ with warnings.catch_warnings():
+ warnings.filterwarnings("ignore", category=DeprecationWarning) # suppress numpy==1.20 float warning
+ ct_model = ct.models.neural_network.quantization_utils.quantize_weights(ct_model, bits, mode)
+ else:
+ print(f'{prefix} quantization only supported on macOS, skipping...')
+ ct_model.save(f)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return ct_model, f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+ return None, None
+
+
+def export_engine(model, im, file, train, half, dynamic, simplify, workspace=4, verbose=False):
+ # YOLOv5 TensorRT export https://developer.nvidia.com/tensorrt
+ prefix = colorstr('TensorRT:')
+ try:
+ assert im.device.type != 'cpu', 'export running on CPU but must be on GPU, i.e. `python export.py --device 0`'
+ try:
+ import tensorrt as trt
+ except Exception:
+ if platform.system() == 'Linux':
+ check_requirements(('nvidia-tensorrt',), cmds=('-U --index-url https://pypi.ngc.nvidia.com',))
+ import tensorrt as trt
+
+ if trt.__version__[0] == '7': # TensorRT 7 handling https://github.com/ultralytics/yolov5/issues/6012
+ grid = model.model[-1].anchor_grid
+ model.model[-1].anchor_grid = [a[..., :1, :1, :] for a in grid]
+ export_onnx(model, im, file, 12, train, dynamic, simplify) # opset 12
+ model.model[-1].anchor_grid = grid
+ else: # TensorRT >= 8
+ check_version(trt.__version__, '8.0.0', hard=True) # require tensorrt>=8.0.0
+ export_onnx(model, im, file, 13, train, dynamic, simplify) # opset 13
+ onnx = file.with_suffix('.onnx')
+
+ LOGGER.info(f'\n{prefix} starting export with TensorRT {trt.__version__}...')
+ assert onnx.exists(), f'failed to export ONNX file: {onnx}'
+ f = file.with_suffix('.engine') # TensorRT engine file
+ logger = trt.Logger(trt.Logger.INFO)
+ if verbose:
+ logger.min_severity = trt.Logger.Severity.VERBOSE
+
+ builder = trt.Builder(logger)
+ config = builder.create_builder_config()
+ config.max_workspace_size = workspace * 1 << 30
+ # config.set_memory_pool_limit(trt.MemoryPoolType.WORKSPACE, workspace << 30) # fix TRT 8.4 deprecation notice
+
+ flag = (1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH))
+ network = builder.create_network(flag)
+ parser = trt.OnnxParser(network, logger)
+ if not parser.parse_from_file(str(onnx)):
+ raise RuntimeError(f'failed to load ONNX file: {onnx}')
+
+ inputs = [network.get_input(i) for i in range(network.num_inputs)]
+ outputs = [network.get_output(i) for i in range(network.num_outputs)]
+ LOGGER.info(f'{prefix} Network Description:')
+ for inp in inputs:
+ LOGGER.info(f'{prefix}\tinput "{inp.name}" with shape {inp.shape} and dtype {inp.dtype}')
+ for out in outputs:
+ LOGGER.info(f'{prefix}\toutput "{out.name}" with shape {out.shape} and dtype {out.dtype}')
+
+ if dynamic:
+ if im.shape[0] <= 1:
+ LOGGER.warning(f"{prefix}WARNING: --dynamic model requires maximum --batch-size argument")
+ profile = builder.create_optimization_profile()
+ for inp in inputs:
+ profile.set_shape(inp.name, (1, *im.shape[1:]), (max(1, im.shape[0] // 2), *im.shape[1:]), im.shape)
+ config.add_optimization_profile(profile)
+
+ LOGGER.info(f'{prefix} building FP{16 if builder.platform_has_fast_fp16 and half else 32} engine in {f}')
+ if builder.platform_has_fast_fp16 and half:
+ config.set_flag(trt.BuilderFlag.FP16)
+ with builder.build_engine(network, config) as engine, open(f, 'wb') as t:
+ t.write(engine.serialize())
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_saved_model(model,
+ im,
+ file,
+ dynamic,
+ tf_nms=False,
+ agnostic_nms=False,
+ topk_per_class=100,
+ topk_all=100,
+ iou_thres=0.45,
+ conf_thres=0.25,
+ keras=False,
+ prefix=colorstr('TensorFlow SavedModel:')):
+ # YOLOv5 TensorFlow SavedModel export
+ try:
+ import tensorflow as tf
+ from tensorflow.python.framework.convert_to_constants import convert_variables_to_constants_v2
+
+ from models.tf import TFDetect, TFModel
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ f = str(file).replace('.pt', '_saved_model')
+ batch_size, ch, *imgsz = list(im.shape) # BCHW
+
+ tf_model = TFModel(cfg=model.yaml, model=model, nc=model.nc, imgsz=imgsz)
+ im = tf.zeros((batch_size, *imgsz, ch)) # BHWC order for TensorFlow
+ _ = tf_model.predict(im, tf_nms, agnostic_nms, topk_per_class, topk_all, iou_thres, conf_thres)
+ inputs = tf.keras.Input(shape=(*imgsz, ch), batch_size=None if dynamic else batch_size)
+ outputs = tf_model.predict(inputs, tf_nms, agnostic_nms, topk_per_class, topk_all, iou_thres, conf_thres)
+ keras_model = tf.keras.Model(inputs=inputs, outputs=outputs)
+ keras_model.trainable = False
+ keras_model.summary()
+ if keras:
+ keras_model.save(f, save_format='tf')
+ else:
+ spec = tf.TensorSpec(keras_model.inputs[0].shape, keras_model.inputs[0].dtype)
+ m = tf.function(lambda x: keras_model(x)) # full model
+ m = m.get_concrete_function(spec)
+ frozen_func = convert_variables_to_constants_v2(m)
+ tfm = tf.Module()
+ tfm.__call__ = tf.function(lambda x: frozen_func(x)[:4] if tf_nms else frozen_func(x)[0], [spec])
+ tfm.__call__(im)
+ tf.saved_model.save(tfm,
+ f,
+ options=tf.saved_model.SaveOptions(experimental_custom_gradients=False)
+ if check_version(tf.__version__, '2.6') else tf.saved_model.SaveOptions())
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return keras_model, f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+ return None, None
+
+
+def export_pb(keras_model, file, prefix=colorstr('TensorFlow GraphDef:')):
+ # YOLOv5 TensorFlow GraphDef *.pb export https://github.com/leimao/Frozen_Graph_TensorFlow
+ try:
+ import tensorflow as tf
+ from tensorflow.python.framework.convert_to_constants import convert_variables_to_constants_v2
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ f = file.with_suffix('.pb')
+
+ m = tf.function(lambda x: keras_model(x)) # full model
+ m = m.get_concrete_function(tf.TensorSpec(keras_model.inputs[0].shape, keras_model.inputs[0].dtype))
+ frozen_func = convert_variables_to_constants_v2(m)
+ frozen_func.graph.as_graph_def()
+ tf.io.write_graph(graph_or_graph_def=frozen_func.graph, logdir=str(f.parent), name=f.name, as_text=False)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_tflite(keras_model, im, file, int8, data, nms, agnostic_nms, prefix=colorstr('TensorFlow Lite:')):
+ # YOLOv5 TensorFlow Lite export
+ try:
+ import tensorflow as tf
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ batch_size, ch, *imgsz = list(im.shape) # BCHW
+ f = str(file).replace('.pt', '-fp16.tflite')
+
+ converter = tf.lite.TFLiteConverter.from_keras_model(keras_model)
+ converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS]
+ converter.target_spec.supported_types = [tf.float16]
+ converter.optimizations = [tf.lite.Optimize.DEFAULT]
+ if int8:
+ from models.tf import representative_dataset_gen
+ dataset = LoadImages(check_dataset(check_yaml(data))['train'], img_size=imgsz, auto=False)
+ converter.representative_dataset = lambda: representative_dataset_gen(dataset, ncalib=100)
+ converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS_INT8]
+ converter.target_spec.supported_types = []
+ converter.inference_input_type = tf.uint8 # or tf.int8
+ converter.inference_output_type = tf.uint8 # or tf.int8
+ converter.experimental_new_quantizer = True
+ f = str(file).replace('.pt', '-int8.tflite')
+ if nms or agnostic_nms:
+ converter.target_spec.supported_ops.append(tf.lite.OpsSet.SELECT_TF_OPS)
+
+ tflite_model = converter.convert()
+ open(f, "wb").write(tflite_model)
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_edgetpu(file, prefix=colorstr('Edge TPU:')):
+ # YOLOv5 Edge TPU export https://coral.ai/docs/edgetpu/models-intro/
+ try:
+ cmd = 'edgetpu_compiler --version'
+ help_url = 'https://coral.ai/docs/edgetpu/compiler/'
+ assert platform.system() == 'Linux', f'export only supported on Linux. See {help_url}'
+ if subprocess.run(f'{cmd} >/dev/null', shell=True).returncode != 0:
+ LOGGER.info(f'\n{prefix} export requires Edge TPU compiler. Attempting install from {help_url}')
+ sudo = subprocess.run('sudo --version >/dev/null', shell=True).returncode == 0 # sudo installed on system
+ for c in (
+ 'curl https://packages.cloud.google.com/apt/doc/apt-key.gpg | sudo apt-key add -',
+ 'echo "deb https://packages.cloud.google.com/apt coral-edgetpu-stable main" | sudo tee /etc/apt/sources.list.d/coral-edgetpu.list',
+ 'sudo apt-get update', 'sudo apt-get install edgetpu-compiler'):
+ subprocess.run(c if sudo else c.replace('sudo ', ''), shell=True, check=True)
+ ver = subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1]
+
+ LOGGER.info(f'\n{prefix} starting export with Edge TPU compiler {ver}...')
+ f = str(file).replace('.pt', '-int8_edgetpu.tflite') # Edge TPU model
+ f_tfl = str(file).replace('.pt', '-int8.tflite') # TFLite model
+
+ cmd = f"edgetpu_compiler -s -o {file.parent} {f_tfl}"
+ subprocess.run(cmd.split(), check=True)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_tfjs(file, prefix=colorstr('TensorFlow.js:')):
+ # YOLOv5 TensorFlow.js export
+ try:
+ check_requirements(('tensorflowjs',))
+ import re
+
+ import tensorflowjs as tfjs
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflowjs {tfjs.__version__}...')
+ f = str(file).replace('.pt', '_web_model') # js dir
+ f_pb = file.with_suffix('.pb') # *.pb path
+ f_json = f'{f}/model.json' # *.json path
+
+ cmd = f'tensorflowjs_converter --input_format=tf_frozen_model ' \
+ f'--output_node_names=Identity,Identity_1,Identity_2,Identity_3 {f_pb} {f}'
+ subprocess.run(cmd.split())
+
+ with open(f_json) as j:
+ json = j.read()
+ with open(f_json, 'w') as j: # sort JSON Identity_* in ascending order
+ subst = re.sub(
+ r'{"outputs": {"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}}}', r'{"outputs": {"Identity": {"name": "Identity"}, '
+ r'"Identity_1": {"name": "Identity_1"}, '
+ r'"Identity_2": {"name": "Identity_2"}, '
+ r'"Identity_3": {"name": "Identity_3"}}}', json)
+ j.write(subst)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+@torch.no_grad()
+def run(
+ data=ROOT / 'data/coco128.yaml', # 'dataset.yaml path'
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=(640, 640), # image (height, width)
+ batch_size=1, # batch size
+ device='cpu', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ include=('torchscript', 'onnx'), # include formats
+ half=False, # FP16 half-precision export
+ inplace=False, # set YOLOv5 Detect() inplace=True
+ train=False, # model.train() mode
+ keras=False, # use Keras
+ optimize=False, # TorchScript: optimize for mobile
+ int8=False, # CoreML/TF INT8 quantization
+ dynamic=False, # ONNX/TF/TensorRT: dynamic axes
+ simplify=False, # ONNX: simplify model
+ opset=12, # ONNX: opset version
+ verbose=False, # TensorRT: verbose log
+ workspace=4, # TensorRT: workspace size (GB)
+ nms=False, # TF: add NMS to model
+ agnostic_nms=False, # TF: add agnostic NMS to model
+ topk_per_class=100, # TF.js NMS: topk per class to keep
+ topk_all=100, # TF.js NMS: topk for all classes to keep
+ iou_thres=0.45, # TF.js NMS: IoU threshold
+ conf_thres=0.25, # TF.js NMS: confidence threshold
+):
+ t = time.time()
+ include = [x.lower() for x in include] # to lowercase
+ fmts = tuple(export_formats()['Argument'][1:]) # --include arguments
+ flags = [x in include for x in fmts]
+ assert sum(flags) == len(include), f'ERROR: Invalid --include {include}, valid --include arguments are {fmts}'
+ jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs = flags # export booleans
+ file = Path(url2file(weights) if str(weights).startswith(('http:/', 'https:/')) else weights) # PyTorch weights
+
+ # Load PyTorch model
+ device = select_device(device)
+ if half:
+ assert device.type != 'cpu' or coreml, '--half only compatible with GPU export, i.e. use --device 0'
+ assert not dynamic, '--half not compatible with --dynamic, i.e. use either --half or --dynamic but not both'
+ model = attempt_load(weights, device=device, inplace=True, fuse=True) # load FP32 model
+ nc, names = model.nc, model.names # number of classes, class names
+
+ # Checks
+ imgsz *= 2 if len(imgsz) == 1 else 1 # expand
+ assert nc == len(names), f'Model class count {nc} != len(names) {len(names)}'
+ if optimize:
+ assert device.type == 'cpu', '--optimize not compatible with cuda devices, i.e. use --device cpu'
+
+ # Input
+ gs = int(max(model.stride)) # grid size (max stride)
+ imgsz = [check_img_size(x, gs) for x in imgsz] # verify img_size are gs-multiples
+ im = torch.zeros(batch_size, 3, *imgsz).to(device) # image size(1,3,320,192) BCHW iDetection
+
+ # Update model
+ model.train() if train else model.eval() # training mode = no Detect() layer grid construction
+ for k, m in model.named_modules():
+ if isinstance(m, Detect):
+ m.inplace = inplace
+ m.onnx_dynamic = dynamic
+ m.export = True
+
+ for _ in range(2):
+ y = model(im) # dry runs
+ if half and not coreml:
+ im, model = im.half(), model.half() # to FP16
+ shape = tuple(y[0].shape) # model output shape
+ LOGGER.info(f"\n{colorstr('PyTorch:')} starting from {file} with output shape {shape} ({file_size(file):.1f} MB)")
+
+ # Exports
+ f = [''] * 10 # exported filenames
+ warnings.filterwarnings(action='ignore', category=torch.jit.TracerWarning) # suppress TracerWarning
+ if jit:
+ f[0] = export_torchscript(model, im, file, optimize)
+ if engine: # TensorRT required before ONNX
+ f[1] = export_engine(model, im, file, train, half, dynamic, simplify, workspace, verbose)
+ if onnx or xml: # OpenVINO requires ONNX
+ f[2] = export_onnx(model, im, file, opset, train, dynamic, simplify)
+ if xml: # OpenVINO
+ f[3] = export_openvino(model, file, half)
+ if coreml:
+ _, f[4] = export_coreml(model, im, file, int8, half)
+
+ # TensorFlow Exports
+ if any((saved_model, pb, tflite, edgetpu, tfjs)):
+ if int8 or edgetpu: # TFLite --int8 bug https://github.com/ultralytics/yolov5/issues/5707
+ check_requirements(('flatbuffers==1.12',)) # required before `import tensorflow`
+ assert not tflite or not tfjs, 'TFLite and TF.js models must be exported separately, please pass only one type.'
+ model, f[5] = export_saved_model(model.cpu(),
+ im,
+ file,
+ dynamic,
+ tf_nms=nms or agnostic_nms or tfjs,
+ agnostic_nms=agnostic_nms or tfjs,
+ topk_per_class=topk_per_class,
+ topk_all=topk_all,
+ iou_thres=iou_thres,
+ conf_thres=conf_thres,
+ keras=keras)
+ if pb or tfjs: # pb prerequisite to tfjs
+ f[6] = export_pb(model, file)
+ if tflite or edgetpu:
+ f[7] = export_tflite(model, im, file, int8=int8 or edgetpu, data=data, nms=nms, agnostic_nms=agnostic_nms)
+ if edgetpu:
+ f[8] = export_edgetpu(file)
+ if tfjs:
+ f[9] = export_tfjs(file)
+
+ # Finish
+ f = [str(x) for x in f if x] # filter out '' and None
+ if any(f):
+ h = '--half' if half else '' # --half FP16 inference arg
+ LOGGER.info(f'\nExport complete ({time.time() - t:.2f}s)'
+ f"\nResults saved to {colorstr('bold', file.parent.resolve())}"
+ f"\nDetect: python detect.py --weights {f[-1]} {h}"
+ f"\nValidate: python val.py --weights {f[-1]} {h}"
+ f"\nPyTorch Hub: model = torch.hub.load('ultralytics/yolov5', 'custom', '{f[-1]}')"
+ f"\nVisualize: https://netron.app")
+ return f # return list of exported files/dirs
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model.pt path(s)')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640, 640], help='image (h, w)')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--device', default='cpu', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--half', action='store_true', help='FP16 half-precision export')
+ parser.add_argument('--inplace', action='store_true', help='set YOLOv5 Detect() inplace=True')
+ parser.add_argument('--train', action='store_true', help='model.train() mode')
+ parser.add_argument('--keras', action='store_true', help='TF: use Keras')
+ parser.add_argument('--optimize', action='store_true', help='TorchScript: optimize for mobile')
+ parser.add_argument('--int8', action='store_true', help='CoreML/TF INT8 quantization')
+ parser.add_argument('--dynamic', action='store_true', help='ONNX/TF/TensorRT: dynamic axes')
+ parser.add_argument('--simplify', action='store_true', help='ONNX: simplify model')
+ parser.add_argument('--opset', type=int, default=12, help='ONNX: opset version')
+ parser.add_argument('--verbose', action='store_true', help='TensorRT: verbose log')
+ parser.add_argument('--workspace', type=int, default=4, help='TensorRT: workspace size (GB)')
+ parser.add_argument('--nms', action='store_true', help='TF: add NMS to model')
+ parser.add_argument('--agnostic-nms', action='store_true', help='TF: add agnostic NMS to model')
+ parser.add_argument('--topk-per-class', type=int, default=100, help='TF.js NMS: topk per class to keep')
+ parser.add_argument('--topk-all', type=int, default=100, help='TF.js NMS: topk for all classes to keep')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='TF.js NMS: IoU threshold')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='TF.js NMS: confidence threshold')
+ parser.add_argument('--include',
+ nargs='+',
+ default=['torchscript', 'onnx'],
+ help='torchscript, onnx, openvino, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ for opt.weights in (opt.weights if isinstance(opt.weights, list) else [opt.weights]):
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/cls/hubconf.py b/yolov7_seg/cls/hubconf.py
new file mode 100644
index 000000000..37beeacd2
--- /dev/null
+++ b/yolov7_seg/cls/hubconf.py
@@ -0,0 +1,160 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+PyTorch Hub models https://pytorch.org/hub/ultralytics_yolov5/
+
+Usage:
+ import torch
+ model = torch.hub.load('ultralytics/yolov5', 'yolov5s')
+ model = torch.hub.load('ultralytics/yolov5:master', 'custom', 'path/to/yolov5s.onnx') # file from branch
+"""
+
+import torch
+
+
+def _create(name, pretrained=True, channels=3, classes=80, autoshape=True, verbose=True, device=None):
+ """Creates or loads a YOLOv5 model
+
+ Arguments:
+ name (str): model name 'yolov5s' or path 'path/to/best.pt'
+ pretrained (bool): load pretrained weights into the model
+ channels (int): number of input channels
+ classes (int): number of model classes
+ autoshape (bool): apply YOLOv5 .autoshape() wrapper to model
+ verbose (bool): print all information to screen
+ device (str, torch.device, None): device to use for model parameters
+
+ Returns:
+ YOLOv5 model
+ """
+ from pathlib import Path
+
+ from models.common import AutoShape, DetectMultiBackend
+ from models.experimental import attempt_load
+ from models.yolo import Model
+ from utils.downloads import attempt_download
+ from utils.general import LOGGER, check_requirements, intersect_dicts, logging
+ from utils.torch_utils import select_device
+
+ if not verbose:
+ LOGGER.setLevel(logging.WARNING)
+ check_requirements(exclude=('tensorboard', 'thop', 'opencv-python'))
+ name = Path(name)
+ path = name.with_suffix('.pt') if name.suffix == '' and not name.is_dir() else name # checkpoint path
+ try:
+ device = select_device(device)
+ if pretrained and channels == 3 and classes == 80:
+ try:
+ model = DetectMultiBackend(path, device=device, fuse=autoshape) # detection model
+ if autoshape:
+ model = AutoShape(model) # for file/URI/PIL/cv2/np inputs and NMS
+ except Exception:
+ model = attempt_load(path, device=device, fuse=False) # arbitrary model
+ else:
+ cfg = list((Path(__file__).parent / 'models').rglob(f'{path.stem}.yaml'))[0] # model.yaml path
+ model = Model(cfg, channels, classes) # create model
+ if pretrained:
+ ckpt = torch.load(attempt_download(path), map_location=device) # load
+ csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
+ csd = intersect_dicts(csd, model.state_dict(), exclude=['anchors']) # intersect
+ model.load_state_dict(csd, strict=False) # load
+ if len(ckpt['model'].names) == classes:
+ model.names = ckpt['model'].names # set class names attribute
+ if not verbose:
+ LOGGER.setLevel(logging.INFO) # reset to default
+ return model.to(device)
+
+ except Exception as e:
+ help_url = 'https://github.com/ultralytics/yolov5/issues/36'
+ s = f'{e}. Cache may be out of date, try `force_reload=True` or see {help_url} for help.'
+ raise Exception(s) from e
+
+
+def custom(path='path/to/model.pt', autoshape=True, _verbose=True, device=None):
+ # YOLOv5 custom or local model
+ return _create(path, autoshape=autoshape, verbose=_verbose, device=device)
+
+
+def yolov5n(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-nano model https://github.com/ultralytics/yolov5
+ return _create('yolov5n', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5s(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-small model https://github.com/ultralytics/yolov5
+ return _create('yolov5s', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5m(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-medium model https://github.com/ultralytics/yolov5
+ return _create('yolov5m', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5l(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-large model https://github.com/ultralytics/yolov5
+ return _create('yolov5l', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5x(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-xlarge model https://github.com/ultralytics/yolov5
+ return _create('yolov5x', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5n6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-nano-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5n6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5s6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-small-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5s6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5m6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-medium-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5m6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5l6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-large-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5l6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5x6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-xlarge-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5x6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+if __name__ == '__main__':
+ import argparse
+ from pathlib import Path
+
+ import numpy as np
+ from PIL import Image
+
+ from utils.general import cv2, print_args
+
+ # Argparser
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--model', type=str, default='yolov5s', help='model name')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+
+ # Model
+ model = _create(name=opt.model, pretrained=True, channels=3, classes=80, autoshape=True, verbose=True)
+ # model = custom(path='path/to/model.pt') # custom
+
+ # Images
+ imgs = [
+ 'data/images/zidane.jpg', # filename
+ Path('data/images/zidane.jpg'), # Path
+ 'https://ultralytics.com/images/zidane.jpg', # URI
+ cv2.imread('data/images/bus.jpg')[:, :, ::-1], # OpenCV
+ Image.open('data/images/bus.jpg'), # PIL
+ np.zeros((320, 640, 3))] # numpy
+
+ # Inference
+ results = model(imgs, size=320) # batched inference
+
+ # Results
+ results.print()
+ results.save()
diff --git a/yolov7_seg/cls/models/__init__.py b/yolov7_seg/cls/models/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/yolov7_seg/cls/models/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/yolov7_seg/cls/models/common.py b/yolov7_seg/cls/models/common.py
new file mode 100644
index 000000000..a65a416ad
--- /dev/null
+++ b/yolov7_seg/cls/models/common.py
@@ -0,0 +1,836 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Common modules
+"""
+
+import json
+import math
+import platform
+import warnings
+from collections import OrderedDict, namedtuple
+from copy import copy
+from pathlib import Path
+
+import cv2
+import numpy as np
+import pandas as pd
+import requests
+import torch
+import torch.nn as nn
+import yaml
+from PIL import Image
+from torch.cuda import amp
+
+from utils.dataloaders import exif_transpose, letterbox
+from utils.general import (LOGGER, check_requirements, check_suffix, check_version, colorstr, increment_path,
+ make_divisible, non_max_suppression, scale_coords, xywh2xyxy, xyxy2xywh)
+from utils.plots import Annotator, colors, save_one_box
+from utils.torch_utils import copy_attr, time_sync
+
+
+class ImplicitA(nn.Module):
+ def __init__(self, channel):
+ super(ImplicitA, self).__init__()
+ self.channel = channel
+ self.implicit = nn.Parameter(torch.zeros(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, std=.02)
+
+ def forward(self, x):
+ return self.implicit + x
+
+
+class ImplicitM(nn.Module):
+ def __init__(self, channel):
+ super(ImplicitM, self).__init__()
+ self.channel = channel
+ self.implicit = nn.Parameter(torch.ones(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=1., std=.02)
+
+ def forward(self, x):
+ return self.implicit * x
+
+
+class MP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, k=2):
+ super(MP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class SP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, k=3, s=1):
+ super(SP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=s, padding=k // 2)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class ReOrg(nn.Module):
+ def __init__(self):
+ super(ReOrg, self).__init__()
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1)
+
+
+def autopad(k, p=None): # kernel, padding
+ # Pad to 'same'
+ if p is None:
+ p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
+ return p
+
+
+class Conv(nn.Module):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ def forward(self, x):
+ return self.act(self.bn(self.conv(x)))
+
+ def forward_fuse(self, x):
+ return self.act(self.conv(x))
+
+
+class DWConv(Conv):
+ # Depth-wise convolution class
+ def __init__(self, c1, c2, k=1, s=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__(c1, c2, k, s, g=math.gcd(c1, c2), act=act)
+
+
+class DWConvTranspose2d(nn.ConvTranspose2d):
+ # Depth-wise transpose convolution class
+ def __init__(self, c1, c2, k=1, s=1, p1=0, p2=0): # ch_in, ch_out, kernel, stride, padding, padding_out
+ super().__init__(c1, c2, k, s, p1, p2, groups=math.gcd(c1, c2))
+
+
+class TransformerLayer(nn.Module):
+ # Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance)
+ def __init__(self, c, num_heads):
+ super().__init__()
+ self.q = nn.Linear(c, c, bias=False)
+ self.k = nn.Linear(c, c, bias=False)
+ self.v = nn.Linear(c, c, bias=False)
+ self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads)
+ self.fc1 = nn.Linear(c, c, bias=False)
+ self.fc2 = nn.Linear(c, c, bias=False)
+
+ def forward(self, x):
+ x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x
+ x = self.fc2(self.fc1(x)) + x
+ return x
+
+
+class TransformerBlock(nn.Module):
+ # Vision Transformer https://arxiv.org/abs/2010.11929
+ def __init__(self, c1, c2, num_heads, num_layers):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+ self.linear = nn.Linear(c2, c2) # learnable position embedding
+ self.tr = nn.Sequential(*(TransformerLayer(c2, num_heads) for _ in range(num_layers)))
+ self.c2 = c2
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ b, _, w, h = x.shape
+ p = x.flatten(2).permute(2, 0, 1)
+ return self.tr(p + self.linear(p)).permute(1, 2, 0).reshape(b, self.c2, w, h)
+
+
+class Bottleneck(nn.Module):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2, 3, 1, g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class BottleneckCSP(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False)
+ self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(cv2, cv3)
+ self.act = nn.SiLU()
+ self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(self.act(self.bn(torch.cat((y1, y2), 1))))
+
+
+class CrossConv(nn.Module):
+ # Cross Convolution Downsample
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False):
+ # ch_in, ch_out, kernel, stride, groups, expansion, shortcut
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, (1, k), (1, s))
+ self.cv2 = Conv(c_, c2, (k, 1), (s, 1), g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class C3(nn.Module):
+ # CSP Bottleneck with 3 convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)
+ self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
+
+ def forward(self, x):
+ return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))
+
+
+class C3x(C3):
+ # C3 module with cross-convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = nn.Sequential(*(CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)))
+
+
+class C3TR(C3):
+ # C3 module with TransformerBlock()
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = TransformerBlock(c_, c_, 4, n)
+
+
+class C3SPP(C3):
+ # C3 module with SPP()
+ def __init__(self, c1, c2, k=(5, 9, 13), n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = SPP(c_, c_, k)
+
+
+class C3Ghost(C3):
+ # C3 module with GhostBottleneck()
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*(GhostBottleneck(c_, c_) for _ in range(n)))
+
+
+class SPP(nn.Module):
+ # Spatial Pyramid Pooling (SPP) layer https://arxiv.org/abs/1406.4729
+ def __init__(self, c1, c2, k=(5, 9, 13)):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+
+ def forward(self, x):
+ x = self.cv1(x)
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
+ return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))
+
+
+class SPPF(nn.Module):
+ # Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
+ def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * 4, c2, 1, 1)
+ self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(torch.cat((x, y1, y2, self.m(y2)), 1))
+
+
+class SPPCSPC(nn.Module):
+ # CSP SPP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super(SPPCSPC, self).__init__()
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 1)
+ self.cv4 = Conv(c_, c_, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+ self.cv5 = Conv(4 * c_, c_, 1, 1)
+ self.cv6 = Conv(c_, c_, 3, 1)
+ self.cv7 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x1 = self.cv4(self.cv3(self.cv1(x)))
+ y1 = self.cv6(self.cv5(torch.cat([x1] + [m(x1) for m in self.m], 1)))
+ y2 = self.cv2(x)
+ return self.cv7(torch.cat((y1, y2), dim=1))
+
+
+class Focus(nn.Module):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
+ # self.contract = Contract(gain=2)
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return self.conv(torch.cat((x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]), 1))
+ # return self.conv(self.contract(x))
+
+
+class GhostConv(nn.Module):
+ # Ghost Convolution https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
+ super().__init__()
+ c_ = c2 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, k, s, None, g, act)
+ self.cv2 = Conv(c_, c_, 5, 1, None, c_, act)
+
+ def forward(self, x):
+ y = self.cv1(x)
+ return torch.cat((y, self.cv2(y)), 1)
+
+
+class GhostBottleneck(nn.Module):
+ # Ghost Bottleneck https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride
+ super().__init__()
+ c_ = c2 // 2
+ self.conv = nn.Sequential(
+ GhostConv(c1, c_, 1, 1), # pw
+ DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw
+ GhostConv(c_, c2, 1, 1, act=False)) # pw-linear
+ self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False), Conv(c1, c2, 1, 1,
+ act=False)) if s == 2 else nn.Identity()
+
+ def forward(self, x):
+ return self.conv(x) + self.shortcut(x)
+
+
+class Contract(nn.Module):
+ # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ b, c, h, w = x.size() # assert (h / s == 0) and (W / s == 0), 'Indivisible gain'
+ s = self.gain
+ x = x.view(b, c, h // s, s, w // s, s) # x(1,64,40,2,40,2)
+ x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
+ return x.view(b, c * s * s, h // s, w // s) # x(1,256,40,40)
+
+
+class Expand(nn.Module):
+ # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ b, c, h, w = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
+ s = self.gain
+ x = x.view(b, s, s, c // s ** 2, h, w) # x(1,2,2,16,80,80)
+ x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
+ return x.view(b, c // s ** 2, h * s, w * s) # x(1,16,160,160)
+
+
+class Concat(nn.Module):
+ # Concatenate a list of tensors along dimension
+ def __init__(self, dimension=1):
+ super().__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return torch.cat(x, self.d)
+
+
+class DetectMultiBackend(nn.Module):
+ # YOLOv5 MultiBackend class for python inference on various backends
+ def __init__(self, weights='yolov5s.pt', device=torch.device('cpu'), dnn=False, data=None, fp16=False, fuse=True):
+ # Usage:
+ # PyTorch: weights = *.pt
+ # TorchScript: *.torchscript
+ # ONNX Runtime: *.onnx
+ # ONNX OpenCV DNN: *.onnx with --dnn
+ # OpenVINO: *.xml
+ # CoreML: *.mlmodel
+ # TensorRT: *.engine
+ # TensorFlow SavedModel: *_saved_model
+ # TensorFlow GraphDef: *.pb
+ # TensorFlow Lite: *.tflite
+ # TensorFlow Edge TPU: *_edgetpu.tflite
+ from models.experimental import attempt_download, attempt_load # scoped to avoid circular import
+
+ super().__init__()
+ w = str(weights[0] if isinstance(weights, list) else weights)
+ pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs = self.model_type(w) # get backend
+ w = attempt_download(w) # download if not local
+ fp16 &= (pt or jit or onnx or engine) and device.type != 'cpu' # FP16
+ stride, names = 32, [f'class{i}' for i in range(1000)] # assign defaults
+ if data: # assign class names (optional)
+ with open(data, errors='ignore') as f:
+ names = yaml.safe_load(f)['names']
+
+ if pt: # PyTorch
+ model = attempt_load(weights if isinstance(weights, list) else w, device=device, inplace=True, fuse=fuse)
+ stride = max(int(model.stride.max()), 32) # model stride
+ names = model.module.names if hasattr(model, 'module') else model.names # get class names
+ model.half() if fp16 else model.float()
+ self.model = model # explicitly assign for to(), cpu(), cuda(), half()
+ elif jit: # TorchScript
+ LOGGER.info(f'Loading {w} for TorchScript inference...')
+ extra_files = {'config.txt': ''} # model metadata
+ model = torch.jit.load(w, _extra_files=extra_files)
+ model.half() if fp16 else model.float()
+ if extra_files['config.txt']:
+ d = json.loads(extra_files['config.txt']) # extra_files dict
+ stride, names = int(d['stride']), d['names']
+ elif dnn: # ONNX OpenCV DNN
+ LOGGER.info(f'Loading {w} for ONNX OpenCV DNN inference...')
+ check_requirements(('opencv-python>=4.5.4',))
+ net = cv2.dnn.readNetFromONNX(w)
+ elif onnx: # ONNX Runtime
+ LOGGER.info(f'Loading {w} for ONNX Runtime inference...')
+ cuda = torch.cuda.is_available()
+ check_requirements(('onnx', 'onnxruntime-gpu' if cuda else 'onnxruntime'))
+ import onnxruntime
+ providers = ['CUDAExecutionProvider', 'CPUExecutionProvider'] if cuda else ['CPUExecutionProvider']
+ session = onnxruntime.InferenceSession(w, providers=providers)
+ meta = session.get_modelmeta().custom_metadata_map # metadata
+ if 'stride' in meta:
+ stride, names = int(meta['stride']), eval(meta['names'])
+ elif xml: # OpenVINO
+ LOGGER.info(f'Loading {w} for OpenVINO inference...')
+ check_requirements(('openvino',)) # requires openvino-dev: https://pypi.org/project/openvino-dev/
+ from openvino.runtime import Core, Layout, get_batch
+ ie = Core()
+ if not Path(w).is_file(): # if not *.xml
+ w = next(Path(w).glob('*.xml')) # get *.xml file from *_openvino_model dir
+ network = ie.read_model(model=w, weights=Path(w).with_suffix('.bin'))
+ if network.get_parameters()[0].get_layout().empty:
+ network.get_parameters()[0].set_layout(Layout("NCHW"))
+ batch_dim = get_batch(network)
+ if batch_dim.is_static:
+ batch_size = batch_dim.get_length()
+ executable_network = ie.compile_model(network, device_name="CPU") # device_name="MYRIAD" for Intel NCS2
+ output_layer = next(iter(executable_network.outputs))
+ meta = Path(w).with_suffix('.yaml')
+ if meta.exists():
+ stride, names = self._load_metadata(meta) # load metadata
+ elif engine: # TensorRT
+ LOGGER.info(f'Loading {w} for TensorRT inference...')
+ import tensorrt as trt # https://developer.nvidia.com/nvidia-tensorrt-download
+ check_version(trt.__version__, '7.0.0', hard=True) # require tensorrt>=7.0.0
+ Binding = namedtuple('Binding', ('name', 'dtype', 'shape', 'data', 'ptr'))
+ logger = trt.Logger(trt.Logger.INFO)
+ with open(w, 'rb') as f, trt.Runtime(logger) as runtime:
+ model = runtime.deserialize_cuda_engine(f.read())
+ context = model.create_execution_context()
+ bindings = OrderedDict()
+ fp16 = False # default updated below
+ dynamic = False
+ for index in range(model.num_bindings):
+ name = model.get_binding_name(index)
+ dtype = trt.nptype(model.get_binding_dtype(index))
+ if model.binding_is_input(index):
+ if -1 in tuple(model.get_binding_shape(index)): # dynamic
+ dynamic = True
+ context.set_binding_shape(index, tuple(model.get_profile_shape(0, index)[2]))
+ if dtype == np.float16:
+ fp16 = True
+ shape = tuple(context.get_binding_shape(index))
+ data = torch.from_numpy(np.empty(shape, dtype=np.dtype(dtype))).to(device)
+ bindings[name] = Binding(name, dtype, shape, data, int(data.data_ptr()))
+ binding_addrs = OrderedDict((n, d.ptr) for n, d in bindings.items())
+ batch_size = bindings['images'].shape[0] # if dynamic, this is instead max batch size
+ elif coreml: # CoreML
+ LOGGER.info(f'Loading {w} for CoreML inference...')
+ import coremltools as ct
+ model = ct.models.MLModel(w)
+ else: # TensorFlow (SavedModel, GraphDef, Lite, Edge TPU)
+ if saved_model: # SavedModel
+ LOGGER.info(f'Loading {w} for TensorFlow SavedModel inference...')
+ import tensorflow as tf
+ keras = False # assume TF1 saved_model
+ model = tf.keras.models.load_model(w) if keras else tf.saved_model.load(w)
+ elif pb: # GraphDef https://www.tensorflow.org/guide/migrate#a_graphpb_or_graphpbtxt
+ LOGGER.info(f'Loading {w} for TensorFlow GraphDef inference...')
+ import tensorflow as tf
+
+ def wrap_frozen_graph(gd, inputs, outputs):
+ x = tf.compat.v1.wrap_function(lambda: tf.compat.v1.import_graph_def(gd, name=""), []) # wrapped
+ ge = x.graph.as_graph_element
+ return x.prune(tf.nest.map_structure(ge, inputs), tf.nest.map_structure(ge, outputs))
+
+ gd = tf.Graph().as_graph_def() # graph_def
+ with open(w, 'rb') as f:
+ gd.ParseFromString(f.read())
+ frozen_func = wrap_frozen_graph(gd, inputs="x:0", outputs="Identity:0")
+ elif tflite or edgetpu: # https://www.tensorflow.org/lite/guide/python#install_tensorflow_lite_for_python
+ try: # https://coral.ai/docs/edgetpu/tflite-python/#update-existing-tf-lite-code-for-the-edge-tpu
+ from tflite_runtime.interpreter import Interpreter, load_delegate
+ except ImportError:
+ import tensorflow as tf
+ Interpreter, load_delegate = tf.lite.Interpreter, tf.lite.experimental.load_delegate,
+ if edgetpu: # Edge TPU https://coral.ai/software/#edgetpu-runtime
+ LOGGER.info(f'Loading {w} for TensorFlow Lite Edge TPU inference...')
+ delegate = {
+ 'Linux': 'libedgetpu.so.1',
+ 'Darwin': 'libedgetpu.1.dylib',
+ 'Windows': 'edgetpu.dll'}[platform.system()]
+ interpreter = Interpreter(model_path=w, experimental_delegates=[load_delegate(delegate)])
+ else: # Lite
+ LOGGER.info(f'Loading {w} for TensorFlow Lite inference...')
+ interpreter = Interpreter(model_path=w) # load TFLite model
+ interpreter.allocate_tensors() # allocate
+ input_details = interpreter.get_input_details() # inputs
+ output_details = interpreter.get_output_details() # outputs
+ elif tfjs:
+ raise Exception('ERROR: YOLOv5 TF.js inference is not supported')
+ else:
+ raise Exception(f'ERROR: {w} is not a supported format')
+ self.__dict__.update(locals()) # assign all variables to self
+
+ def forward(self, im, augment=False, visualize=False, val=False):
+ # YOLOv5 MultiBackend inference
+ b, ch, h, w = im.shape # batch, channel, height, width
+ if self.fp16 and im.dtype != torch.float16:
+ im = im.half() # to FP16
+
+ if self.pt: # PyTorch
+ y = self.model(im, augment=augment, visualize=visualize)[0]
+ elif self.jit: # TorchScript
+ y = self.model(im)[0]
+ elif self.dnn: # ONNX OpenCV DNN
+ im = im.cpu().numpy() # torch to numpy
+ self.net.setInput(im)
+ y = self.net.forward()
+ elif self.onnx: # ONNX Runtime
+ im = im.cpu().numpy() # torch to numpy
+ y = self.session.run([self.session.get_outputs()[0].name], {self.session.get_inputs()[0].name: im})[0]
+ elif self.xml: # OpenVINO
+ im = im.cpu().numpy() # FP32
+ y = self.executable_network([im])[self.output_layer]
+ elif self.engine: # TensorRT
+ if self.dynamic and im.shape != self.bindings['images'].shape:
+ i_in, i_out = (self.model.get_binding_index(x) for x in ('images', 'output'))
+ self.context.set_binding_shape(i_in, im.shape) # reshape if dynamic
+ self.bindings['images'] = self.bindings['images']._replace(shape=im.shape)
+ self.bindings['output'].data.resize_(tuple(self.context.get_binding_shape(i_out)))
+ s = self.bindings['images'].shape
+ assert im.shape == s, f"input size {im.shape} {'>' if self.dynamic else 'not equal to'} max model size {s}"
+ self.binding_addrs['images'] = int(im.data_ptr())
+ self.context.execute_v2(list(self.binding_addrs.values()))
+ y = self.bindings['output'].data
+ elif self.coreml: # CoreML
+ im = im.permute(0, 2, 3, 1).cpu().numpy() # torch BCHW to numpy BHWC shape(1,320,192,3)
+ im = Image.fromarray((im[0] * 255).astype('uint8'))
+ # im = im.resize((192, 320), Image.ANTIALIAS)
+ y = self.model.predict({'image': im}) # coordinates are xywh normalized
+ if 'confidence' in y:
+ box = xywh2xyxy(y['coordinates'] * [[w, h, w, h]]) # xyxy pixels
+ conf, cls = y['confidence'].max(1), y['confidence'].argmax(1).astype(np.float)
+ y = np.concatenate((box, conf.reshape(-1, 1), cls.reshape(-1, 1)), 1)
+ else:
+ k = 'var_' + str(sorted(int(k.replace('var_', '')) for k in y)[-1]) # output key
+ y = y[k] # output
+ else: # TensorFlow (SavedModel, GraphDef, Lite, Edge TPU)
+ im = im.permute(0, 2, 3, 1).cpu().numpy() # torch BCHW to numpy BHWC shape(1,320,192,3)
+ if self.saved_model: # SavedModel
+ y = (self.model(im, training=False) if self.keras else self.model(im)).numpy()
+ elif self.pb: # GraphDef
+ y = self.frozen_func(x=self.tf.constant(im)).numpy()
+ else: # Lite or Edge TPU
+ input, output = self.input_details[0], self.output_details[0]
+ int8 = input['dtype'] == np.uint8 # is TFLite quantized uint8 model
+ if int8:
+ scale, zero_point = input['quantization']
+ im = (im / scale + zero_point).astype(np.uint8) # de-scale
+ self.interpreter.set_tensor(input['index'], im)
+ self.interpreter.invoke()
+ y = self.interpreter.get_tensor(output['index'])
+ if int8:
+ scale, zero_point = output['quantization']
+ y = (y.astype(np.float32) - zero_point) * scale # re-scale
+ y[..., :4] *= [w, h, w, h] # xywh normalized to pixels
+
+ if isinstance(y, np.ndarray):
+ y = torch.tensor(y, device=self.device)
+ return (y, []) if val else y
+
+ def warmup(self, imgsz=(1, 3, 640, 640)):
+ # Warmup model by running inference once
+ warmup_types = self.pt, self.jit, self.onnx, self.engine, self.saved_model, self.pb
+ if any(warmup_types) and self.device.type != 'cpu':
+ im = torch.zeros(*imgsz, dtype=torch.half if self.fp16 else torch.float, device=self.device) # input
+ for _ in range(2 if self.jit else 1): #
+ self.forward(im) # warmup
+
+ @staticmethod
+ def model_type(p='path/to/model.pt'):
+ # Return model type from model path, i.e. path='path/to/model.onnx' -> type=onnx
+ from export import export_formats
+ suffixes = list(export_formats().Suffix) + ['.xml'] # export suffixes
+ check_suffix(p, suffixes) # checks
+ p = Path(p).name # eliminate trailing separators
+ pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs, xml2 = (s in p for s in suffixes)
+ xml |= xml2 # *_openvino_model or *.xml
+ tflite &= not edgetpu # *.tflite
+ return pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs
+
+ @staticmethod
+ def _load_metadata(f='path/to/meta.yaml'):
+ # Load metadata from meta.yaml if it exists
+ with open(f, errors='ignore') as f:
+ d = yaml.safe_load(f)
+ return d['stride'], d['names'] # assign stride, names
+
+
+class AutoShape(nn.Module):
+ # YOLOv5 input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS
+ conf = 0.25 # NMS confidence threshold
+ iou = 0.45 # NMS IoU threshold
+ agnostic = False # NMS class-agnostic
+ multi_label = False # NMS multiple labels per box
+ classes = None # (optional list) filter by class, i.e. = [0, 15, 16] for COCO persons, cats and dogs
+ max_det = 1000 # maximum number of detections per image
+ amp = False # Automatic Mixed Precision (AMP) inference
+
+ def __init__(self, model, verbose=True):
+ super().__init__()
+ if verbose:
+ LOGGER.info('Adding AutoShape... ')
+ copy_attr(self, model, include=('yaml', 'nc', 'hyp', 'names', 'stride', 'abc'), exclude=()) # copy attributes
+ self.dmb = isinstance(model, DetectMultiBackend) # DetectMultiBackend() instance
+ self.pt = not self.dmb or model.pt # PyTorch model
+ self.model = model.eval()
+ if self.pt:
+ m = self.model.model.model[-1] if self.dmb else self.model.model[-1] # Detect()
+ m.inplace = False # Detect.inplace=False for safe multithread inference
+
+ def _apply(self, fn):
+ # Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers
+ self = super()._apply(fn)
+ if self.pt:
+ m = self.model.model.model[-1] if self.dmb else self.model.model[-1] # Detect()
+ m.stride = fn(m.stride)
+ m.grid = list(map(fn, m.grid))
+ if isinstance(m.anchor_grid, list):
+ m.anchor_grid = list(map(fn, m.anchor_grid))
+ return self
+
+ @torch.no_grad()
+ def forward(self, imgs, size=640, augment=False, profile=False):
+ # Inference from various sources. For height=640, width=1280, RGB images example inputs are:
+ # file: imgs = 'data/images/zidane.jpg' # str or PosixPath
+ # URI: = 'https://ultralytics.com/images/zidane.jpg'
+ # OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3)
+ # PIL: = Image.open('image.jpg') or ImageGrab.grab() # HWC x(640,1280,3)
+ # numpy: = np.zeros((640,1280,3)) # HWC
+ # torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values)
+ # multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images
+
+ t = [time_sync()]
+ p = next(self.model.parameters()) if self.pt else torch.zeros(1, device=self.model.device) # for device, type
+ autocast = self.amp and (p.device.type != 'cpu') # Automatic Mixed Precision (AMP) inference
+ if isinstance(imgs, torch.Tensor): # torch
+ with amp.autocast(autocast):
+ return self.model(imgs.to(p.device).type_as(p), augment, profile) # inference
+
+ # Pre-process
+ n, imgs = (len(imgs), list(imgs)) if isinstance(imgs, (list, tuple)) else (1, [imgs]) # number, list of images
+ shape0, shape1, files = [], [], [] # image and inference shapes, filenames
+ for i, im in enumerate(imgs):
+ f = f'image{i}' # filename
+ if isinstance(im, (str, Path)): # filename or uri
+ im, f = Image.open(requests.get(im, stream=True).raw if str(im).startswith('http') else im), im
+ im = np.asarray(exif_transpose(im))
+ elif isinstance(im, Image.Image): # PIL Image
+ im, f = np.asarray(exif_transpose(im)), getattr(im, 'filename', f) or f
+ files.append(Path(f).with_suffix('.jpg').name)
+ if im.shape[0] < 5: # image in CHW
+ im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1)
+ im = im[..., :3] if im.ndim == 3 else np.tile(im[..., None], 3) # enforce 3ch input
+ s = im.shape[:2] # HWC
+ shape0.append(s) # image shape
+ g = (size / max(s)) # gain
+ shape1.append([y * g for y in s])
+ imgs[i] = im if im.data.contiguous else np.ascontiguousarray(im) # update
+ shape1 = [make_divisible(x, self.stride) if self.pt else size for x in np.array(shape1).max(0)] # inf shape
+ x = [letterbox(im, shape1, auto=False)[0] for im in imgs] # pad
+ x = np.ascontiguousarray(np.array(x).transpose((0, 3, 1, 2))) # stack and BHWC to BCHW
+ x = torch.from_numpy(x).to(p.device).type_as(p) / 255 # uint8 to fp16/32
+ t.append(time_sync())
+
+ with amp.autocast(autocast):
+ # Inference
+ y = self.model(x, augment, profile) # forward
+ t.append(time_sync())
+
+ # Post-process
+ y = non_max_suppression(y if self.dmb else y[0],
+ self.conf,
+ self.iou,
+ self.classes,
+ self.agnostic,
+ self.multi_label,
+ max_det=self.max_det) # NMS
+ for i in range(n):
+ scale_coords(shape1, y[i][:, :4], shape0[i])
+
+ t.append(time_sync())
+ return Detections(imgs, y, files, t, self.names, x.shape)
+
+
+class Detections:
+ # YOLOv5 detections class for inference results
+ def __init__(self, imgs, pred, files, times=(0, 0, 0, 0), names=None, shape=None):
+ super().__init__()
+ d = pred[0].device # device
+ gn = [torch.tensor([*(im.shape[i] for i in [1, 0, 1, 0]), 1, 1], device=d) for im in imgs] # normalizations
+ self.imgs = imgs # list of images as numpy arrays
+ self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls)
+ self.names = names # class names
+ self.files = files # image filenames
+ self.times = times # profiling times
+ self.xyxy = pred # xyxy pixels
+ self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels
+ self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized
+ self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized
+ self.n = len(self.pred) # number of images (batch size)
+ self.t = tuple((times[i + 1] - times[i]) * 1000 / self.n for i in range(3)) # timestamps (ms)
+ self.s = shape # inference BCHW shape
+
+ def display(self, pprint=False, show=False, save=False, crop=False, render=False, labels=True, save_dir=Path('')):
+ crops = []
+ for i, (im, pred) in enumerate(zip(self.imgs, self.pred)):
+ s = f'image {i + 1}/{len(self.pred)}: {im.shape[0]}x{im.shape[1]} ' # string
+ if pred.shape[0]:
+ for c in pred[:, -1].unique():
+ n = (pred[:, -1] == c).sum() # detections per class
+ s += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string
+ if show or save or render or crop:
+ annotator = Annotator(im, example=str(self.names))
+ for *box, conf, cls in reversed(pred): # xyxy, confidence, class
+ label = f'{self.names[int(cls)]} {conf:.2f}'
+ if crop:
+ file = save_dir / 'crops' / self.names[int(cls)] / self.files[i] if save else None
+ crops.append({
+ 'box': box,
+ 'conf': conf,
+ 'cls': cls,
+ 'label': label,
+ 'im': save_one_box(box, im, file=file, save=save)})
+ else: # all others
+ annotator.box_label(box, label if labels else '', color=colors(cls))
+ im = annotator.im
+ else:
+ s += '(no detections)'
+
+ im = Image.fromarray(im.astype(np.uint8)) if isinstance(im, np.ndarray) else im # from np
+ if pprint:
+ print(s.rstrip(', '))
+ if show:
+ im.show(self.files[i]) # show
+ if save:
+ f = self.files[i]
+ im.save(save_dir / f) # save
+ if i == self.n - 1:
+ LOGGER.info(f"Saved {self.n} image{'s' * (self.n > 1)} to {colorstr('bold', save_dir)}")
+ if render:
+ self.imgs[i] = np.asarray(im)
+ if crop:
+ if save:
+ LOGGER.info(f'Saved results to {save_dir}\n')
+ return crops
+
+ def print(self):
+ self.display(pprint=True) # print results
+ print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {tuple(self.s)}' % self.t)
+
+ def show(self, labels=True):
+ self.display(show=True, labels=labels) # show results
+
+ def save(self, labels=True, save_dir='runs/detect/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) # increment save_dir
+ self.display(save=True, labels=labels, save_dir=save_dir) # save results
+
+ def crop(self, save=True, save_dir='runs/detect/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) if save else None
+ return self.display(crop=True, save=save, save_dir=save_dir) # crop results
+
+ def render(self, labels=True):
+ self.display(render=True, labels=labels) # render results
+ return self.imgs
+
+ def pandas(self):
+ # return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0])
+ new = copy(self) # return copy
+ ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns
+ cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns
+ for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]):
+ a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update
+ setattr(new, k, [pd.DataFrame(x, columns=c) for x in a])
+ return new
+
+ def tolist(self):
+ # return a list of Detections objects, i.e. 'for result in results.tolist():'
+ r = range(self.n) # iterable
+ x = [Detections([self.imgs[i]], [self.pred[i]], [self.files[i]], self.times, self.names, self.s) for i in r]
+ # for d in x:
+ # for k in ['imgs', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']:
+ # setattr(d, k, getattr(d, k)[0]) # pop out of list
+ return x
+
+ def __len__(self):
+ return self.n # override len(results)
+
+ def __str__(self):
+ self.print() # override print(results)
+ return ''
+
+
+class Classify(nn.Module):
+ # Classification head, i.e. x(b,c1,20,20) to x(b,c2)
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ c_ = 1280 # efficientnet_b0 size
+ self.conv = Conv(c1, c_, k, s, autopad(k, p), g)
+ self.pool = nn.AdaptiveAvgPool2d(1) # to x(b,c_,1,1)
+ self.drop = nn.Dropout(p=0.0, inplace=True)
+ self.linear = nn.Linear(c_, c2) # to x(b,c2)
+
+ def forward(self, x):
+ if isinstance(x, list):
+ x = torch.cat(x, 1)
+ return self.linear(self.drop(self.pool(self.conv(x)).flatten(1)))
diff --git a/yolov7_seg/cls/models/experimental.py b/yolov7_seg/cls/models/experimental.py
new file mode 100644
index 000000000..374c4a065
--- /dev/null
+++ b/yolov7_seg/cls/models/experimental.py
@@ -0,0 +1,105 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Experimental modules
+"""
+import math
+
+import numpy as np
+import torch
+import torch.nn as nn
+
+from models.common import Conv
+from utils.downloads import attempt_download
+
+
+class Sum(nn.Module):
+ # Weighted sum of 2 or more layers https://arxiv.org/abs/1911.09070
+ def __init__(self, n, weight=False): # n: number of inputs
+ super().__init__()
+ self.weight = weight # apply weights boolean
+ self.iter = range(n - 1) # iter object
+ if weight:
+ self.w = nn.Parameter(-torch.arange(1.0, n) / 2, requires_grad=True) # layer weights
+
+ def forward(self, x):
+ y = x[0] # no weight
+ if self.weight:
+ w = torch.sigmoid(self.w) * 2
+ for i in self.iter:
+ y = y + x[i + 1] * w[i]
+ else:
+ for i in self.iter:
+ y = y + x[i + 1]
+ return y
+
+
+class MixConv2d(nn.Module):
+ # Mixed Depth-wise Conv https://arxiv.org/abs/1907.09595
+ def __init__(self, c1, c2, k=(1, 3), s=1, equal_ch=True): # ch_in, ch_out, kernel, stride, ch_strategy
+ super().__init__()
+ n = len(k) # number of convolutions
+ if equal_ch: # equal c_ per group
+ i = torch.linspace(0, n - 1E-6, c2).floor() # c2 indices
+ c_ = [(i == g).sum() for g in range(n)] # intermediate channels
+ else: # equal weight.numel() per group
+ b = [c2] + [0] * n
+ a = np.eye(n + 1, n, k=-1)
+ a -= np.roll(a, 1, axis=1)
+ a *= np.array(k) ** 2
+ a[0] = 1
+ c_ = np.linalg.lstsq(a, b, rcond=None)[0].round() # solve for equal weight indices, ax = b
+
+ self.m = nn.ModuleList([
+ nn.Conv2d(c1, int(c_), k, s, k // 2, groups=math.gcd(c1, int(c_)), bias=False) for k, c_ in zip(k, c_)])
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU()
+
+ def forward(self, x):
+ return self.act(self.bn(torch.cat([m(x) for m in self.m], 1)))
+
+
+class Ensemble(nn.ModuleList):
+ # Ensemble of models
+ def __init__(self):
+ super().__init__()
+
+ def forward(self, x, augment=False, profile=False, visualize=False):
+ y = [module(x, augment, profile, visualize)[0] for module in self]
+ # y = torch.stack(y).max(0)[0] # max ensemble
+ # y = torch.stack(y).mean(0) # mean ensemble
+ y = torch.cat(y, 1) # nms ensemble
+ return y, None # inference, train output
+
+
+def attempt_load(weights, device=None, inplace=True, fuse=True):
+ # Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a
+ from models.yolo import Detect, Model
+
+ model = Ensemble()
+ for w in weights if isinstance(weights, list) else [weights]:
+ ckpt = torch.load(attempt_download(w), map_location='cpu') # load
+ ckpt = (ckpt.get('ema') or ckpt['model']).to(device).float() # FP32 model
+ model.append(ckpt.fuse().eval() if fuse else ckpt.eval()) # fused or un-fused model in eval mode
+
+ # Compatibility updates
+ for m in model.modules():
+ t = type(m)
+ if t in (nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU, Detect, Model):
+ m.inplace = inplace # torch 1.7.0 compatibility
+ if t is Detect and not isinstance(m.anchor_grid, list):
+ delattr(m, 'anchor_grid')
+ setattr(m, 'anchor_grid', [torch.zeros(1)] * m.nl)
+ elif t is nn.Upsample and not hasattr(m, 'recompute_scale_factor'):
+ m.recompute_scale_factor = None # torch 1.11.0 compatibility
+
+ # Return model
+ if len(model) == 1:
+ return model[-1]
+
+ # Return detection ensemble
+ print(f'Ensemble created with {weights}\n')
+ for k in 'names', 'nc', 'yaml':
+ setattr(model, k, getattr(model[0], k))
+ model.stride = model[torch.argmax(torch.tensor([m.stride.max() for m in model])).int()].stride # max stride
+ assert all(model[0].nc == m.nc for m in model), f'Models have different class counts: {[m.nc for m in model]}'
+ return model
diff --git a/yolov7_seg/cls/models/hub/yolov3-spp.yaml b/yolov7_seg/cls/models/hub/yolov3-spp.yaml
new file mode 100644
index 000000000..299d76669
--- /dev/null
+++ b/yolov7_seg/cls/models/hub/yolov3-spp.yaml
@@ -0,0 +1,51 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,13, 16,30, 33,23] # P3/8
+ - [30,61, 62,45, 59,119] # P4/16
+ - [116,90, 156,198, 373,326] # P5/32
+
+# darknet53 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Bottleneck, [64]],
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 2, Bottleneck, [128]],
+ [-1, 1, Conv, [256, 3, 2]], # 5-P3/8
+ [-1, 8, Bottleneck, [256]],
+ [-1, 1, Conv, [512, 3, 2]], # 7-P4/16
+ [-1, 8, Bottleneck, [512]],
+ [-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
+ [-1, 4, Bottleneck, [1024]], # 10
+ ]
+
+# YOLOv3-SPP head
+head:
+ [[-1, 1, Bottleneck, [1024, False]],
+ [-1, 1, SPP, [512, [5, 9, 13]]],
+ [-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 6], 1, Concat, [1]], # cat backbone P3
+ [-1, 1, Bottleneck, [256, False]],
+ [-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)
+
+ [[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
+ ]
diff --git a/yolov7_seg/cls/models/hub/yolov3-tiny.yaml b/yolov7_seg/cls/models/hub/yolov3-tiny.yaml
new file mode 100644
index 000000000..f9ac6b177
--- /dev/null
+++ b/yolov7_seg/cls/models/hub/yolov3-tiny.yaml
@@ -0,0 +1,41 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,14, 23,27, 37,58] # P4/16
+ - [81,82, 135,169, 344,319] # P5/32
+
+# YOLOv3-tiny backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [16, 3, 1]], # 0
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 1-P1/2
+ [-1, 1, Conv, [32, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 3-P2/4
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 5-P3/8
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 7-P4/16
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 9-P5/32
+ [-1, 1, Conv, [512, 3, 1]],
+ [-1, 1, nn.ZeroPad2d, [[0, 1, 0, 1]]], # 11
+ [-1, 1, nn.MaxPool2d, [2, 1, 0]], # 12
+ ]
+
+# YOLOv3-tiny head
+head:
+ [[-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Conv, [256, 3, 1]], # 19 (P4/16-medium)
+
+ [[19, 15], 1, Detect, [nc, anchors]], # Detect(P4, P5)
+ ]
diff --git a/yolov7_seg/cls/models/hub/yolov3.yaml b/yolov7_seg/cls/models/hub/yolov3.yaml
new file mode 100644
index 000000000..22b29d22c
--- /dev/null
+++ b/yolov7_seg/cls/models/hub/yolov3.yaml
@@ -0,0 +1,51 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,13, 16,30, 33,23] # P3/8
+ - [30,61, 62,45, 59,119] # P4/16
+ - [116,90, 156,198, 373,326] # P5/32
+
+# darknet53 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Bottleneck, [64]],
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 2, Bottleneck, [128]],
+ [-1, 1, Conv, [256, 3, 2]], # 5-P3/8
+ [-1, 8, Bottleneck, [256]],
+ [-1, 1, Conv, [512, 3, 2]], # 7-P4/16
+ [-1, 8, Bottleneck, [512]],
+ [-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
+ [-1, 4, Bottleneck, [1024]], # 10
+ ]
+
+# YOLOv3 head
+head:
+ [[-1, 1, Bottleneck, [1024, False]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 6], 1, Concat, [1]], # cat backbone P3
+ [-1, 1, Bottleneck, [256, False]],
+ [-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)
+
+ [[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
+ ]
diff --git a/yolov7_seg/cls/models/tf.py b/yolov7_seg/cls/models/tf.py
new file mode 100644
index 000000000..fb2cf814a
--- /dev/null
+++ b/yolov7_seg/cls/models/tf.py
@@ -0,0 +1,574 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+TensorFlow, Keras and TFLite versions of YOLOv5
+Authored by https://github.com/zldrobit in PR https://github.com/ultralytics/yolov5/pull/1127
+
+Usage:
+ $ python models/tf.py --weights yolov5s.pt
+
+Export:
+ $ python path/to/export.py --weights yolov5s.pt --include saved_model pb tflite tfjs
+"""
+
+import argparse
+import sys
+from copy import deepcopy
+from pathlib import Path
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+# ROOT = ROOT.relative_to(Path.cwd()) # relative
+
+import numpy as np
+import tensorflow as tf
+import torch
+import torch.nn as nn
+from tensorflow import keras
+
+from models.common import (C3, SPP, SPPF, Bottleneck, BottleneckCSP, C3x, Concat, Conv, CrossConv, DWConv,
+ DWConvTranspose2d, Focus, autopad)
+from models.experimental import MixConv2d, attempt_load
+from models.yolo import Detect
+from utils.activations import SiLU
+from utils.general import LOGGER, make_divisible, print_args
+
+
+class TFBN(keras.layers.Layer):
+ # TensorFlow BatchNormalization wrapper
+ def __init__(self, w=None):
+ super().__init__()
+ self.bn = keras.layers.BatchNormalization(
+ beta_initializer=keras.initializers.Constant(w.bias.numpy()),
+ gamma_initializer=keras.initializers.Constant(w.weight.numpy()),
+ moving_mean_initializer=keras.initializers.Constant(w.running_mean.numpy()),
+ moving_variance_initializer=keras.initializers.Constant(w.running_var.numpy()),
+ epsilon=w.eps)
+
+ def call(self, inputs):
+ return self.bn(inputs)
+
+
+class TFPad(keras.layers.Layer):
+ # Pad inputs in spatial dimensions 1 and 2
+ def __init__(self, pad):
+ super().__init__()
+ if isinstance(pad, int):
+ self.pad = tf.constant([[0, 0], [pad, pad], [pad, pad], [0, 0]])
+ else: # tuple/list
+ self.pad = tf.constant([[0, 0], [pad[0], pad[0]], [pad[1], pad[1]], [0, 0]])
+
+ def call(self, inputs):
+ return tf.pad(inputs, self.pad, mode='constant', constant_values=0)
+
+
+class TFConv(keras.layers.Layer):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert g == 1, "TF v2.2 Conv2D does not support 'groups' argument"
+ # TensorFlow convolution padding is inconsistent with PyTorch (e.g. k=3 s=2 'SAME' padding)
+ # see https://stackoverflow.com/questions/52975843/comparing-conv2d-with-padding-between-tensorflow-and-pytorch
+ conv = keras.layers.Conv2D(
+ filters=c2,
+ kernel_size=k,
+ strides=s,
+ padding='SAME' if s == 1 else 'VALID',
+ use_bias=not hasattr(w, 'bn'),
+ kernel_initializer=keras.initializers.Constant(w.conv.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer='zeros' if hasattr(w, 'bn') else keras.initializers.Constant(w.conv.bias.numpy()))
+ self.conv = conv if s == 1 else keras.Sequential([TFPad(autopad(k, p)), conv])
+ self.bn = TFBN(w.bn) if hasattr(w, 'bn') else tf.identity
+ self.act = activations(w.act) if act else tf.identity
+
+ def call(self, inputs):
+ return self.act(self.bn(self.conv(inputs)))
+
+
+class TFDWConv(keras.layers.Layer):
+ # Depthwise convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, act=True, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert c2 % c1 == 0, f'TFDWConv() output={c2} must be a multiple of input={c1} channels'
+ conv = keras.layers.DepthwiseConv2D(
+ kernel_size=k,
+ depth_multiplier=c2 // c1,
+ strides=s,
+ padding='SAME' if s == 1 else 'VALID',
+ use_bias=not hasattr(w, 'bn'),
+ depthwise_initializer=keras.initializers.Constant(w.conv.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer='zeros' if hasattr(w, 'bn') else keras.initializers.Constant(w.conv.bias.numpy()))
+ self.conv = conv if s == 1 else keras.Sequential([TFPad(autopad(k, p)), conv])
+ self.bn = TFBN(w.bn) if hasattr(w, 'bn') else tf.identity
+ self.act = activations(w.act) if act else tf.identity
+
+ def call(self, inputs):
+ return self.act(self.bn(self.conv(inputs)))
+
+
+class TFDWConvTranspose2d(keras.layers.Layer):
+ # Depthwise ConvTranspose2d
+ def __init__(self, c1, c2, k=1, s=1, p1=0, p2=0, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert c1 == c2, f'TFDWConv() output={c2} must be equal to input={c1} channels'
+ assert k == 4 and p1 == 1, 'TFDWConv() only valid for k=4 and p1=1'
+ weight, bias = w.weight.permute(2, 3, 1, 0).numpy(), w.bias.numpy()
+ self.c1 = c1
+ self.conv = [
+ keras.layers.Conv2DTranspose(filters=1,
+ kernel_size=k,
+ strides=s,
+ padding='VALID',
+ output_padding=p2,
+ use_bias=True,
+ kernel_initializer=keras.initializers.Constant(weight[..., i:i + 1]),
+ bias_initializer=keras.initializers.Constant(bias[i])) for i in range(c1)]
+
+ def call(self, inputs):
+ return tf.concat([m(x) for m, x in zip(self.conv, tf.split(inputs, self.c1, 3))], 3)[:, 1:-1, 1:-1]
+
+
+class TFFocus(keras.layers.Layer):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True, w=None):
+ # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = TFConv(c1 * 4, c2, k, s, p, g, act, w.conv)
+
+ def call(self, inputs): # x(b,w,h,c) -> y(b,w/2,h/2,4c)
+ # inputs = inputs / 255 # normalize 0-255 to 0-1
+ inputs = [inputs[:, ::2, ::2, :], inputs[:, 1::2, ::2, :], inputs[:, ::2, 1::2, :], inputs[:, 1::2, 1::2, :]]
+ return self.conv(tf.concat(inputs, 3))
+
+
+class TFBottleneck(keras.layers.Layer):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5, w=None): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_, c2, 3, 1, g=g, w=w.cv2)
+ self.add = shortcut and c1 == c2
+
+ def call(self, inputs):
+ return inputs + self.cv2(self.cv1(inputs)) if self.add else self.cv2(self.cv1(inputs))
+
+
+class TFCrossConv(keras.layers.Layer):
+ # Cross Convolution
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False, w=None):
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, (1, k), (1, s), w=w.cv1)
+ self.cv2 = TFConv(c_, c2, (k, 1), (s, 1), g=g, w=w.cv2)
+ self.add = shortcut and c1 == c2
+
+ def call(self, inputs):
+ return inputs + self.cv2(self.cv1(inputs)) if self.add else self.cv2(self.cv1(inputs))
+
+
+class TFConv2d(keras.layers.Layer):
+ # Substitution for PyTorch nn.Conv2D
+ def __init__(self, c1, c2, k, s=1, g=1, bias=True, w=None):
+ super().__init__()
+ assert g == 1, "TF v2.2 Conv2D does not support 'groups' argument"
+ self.conv = keras.layers.Conv2D(filters=c2,
+ kernel_size=k,
+ strides=s,
+ padding='VALID',
+ use_bias=bias,
+ kernel_initializer=keras.initializers.Constant(
+ w.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer=keras.initializers.Constant(w.bias.numpy()) if bias else None)
+
+ def call(self, inputs):
+ return self.conv(inputs)
+
+
+class TFBottleneckCSP(keras.layers.Layer):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv2d(c1, c_, 1, 1, bias=False, w=w.cv2)
+ self.cv3 = TFConv2d(c_, c_, 1, 1, bias=False, w=w.cv3)
+ self.cv4 = TFConv(2 * c_, c2, 1, 1, w=w.cv4)
+ self.bn = TFBN(w.bn)
+ self.act = lambda x: keras.activations.swish(x)
+ self.m = keras.Sequential([TFBottleneck(c_, c_, shortcut, g, e=1.0, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ y1 = self.cv3(self.m(self.cv1(inputs)))
+ y2 = self.cv2(inputs)
+ return self.cv4(self.act(self.bn(tf.concat((y1, y2), axis=3))))
+
+
+class TFC3(keras.layers.Layer):
+ # CSP Bottleneck with 3 convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c1, c_, 1, 1, w=w.cv2)
+ self.cv3 = TFConv(2 * c_, c2, 1, 1, w=w.cv3)
+ self.m = keras.Sequential([TFBottleneck(c_, c_, shortcut, g, e=1.0, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ return self.cv3(tf.concat((self.m(self.cv1(inputs)), self.cv2(inputs)), axis=3))
+
+
+class TFC3x(keras.layers.Layer):
+ # 3 module with cross-convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c1, c_, 1, 1, w=w.cv2)
+ self.cv3 = TFConv(2 * c_, c2, 1, 1, w=w.cv3)
+ self.m = keras.Sequential([
+ TFCrossConv(c_, c_, k=3, s=1, g=g, e=1.0, shortcut=shortcut, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ return self.cv3(tf.concat((self.m(self.cv1(inputs)), self.cv2(inputs)), axis=3))
+
+
+class TFSPP(keras.layers.Layer):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, k=(5, 9, 13), w=None):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_ * (len(k) + 1), c2, 1, 1, w=w.cv2)
+ self.m = [keras.layers.MaxPool2D(pool_size=x, strides=1, padding='SAME') for x in k]
+
+ def call(self, inputs):
+ x = self.cv1(inputs)
+ return self.cv2(tf.concat([x] + [m(x) for m in self.m], 3))
+
+
+class TFSPPF(keras.layers.Layer):
+ # Spatial pyramid pooling-Fast layer
+ def __init__(self, c1, c2, k=5, w=None):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_ * 4, c2, 1, 1, w=w.cv2)
+ self.m = keras.layers.MaxPool2D(pool_size=k, strides=1, padding='SAME')
+
+ def call(self, inputs):
+ x = self.cv1(inputs)
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(tf.concat([x, y1, y2, self.m(y2)], 3))
+
+
+class TFDetect(keras.layers.Layer):
+ # TF YOLOv5 Detect layer
+ def __init__(self, nc=80, anchors=(), ch=(), imgsz=(640, 640), w=None): # detection layer
+ super().__init__()
+ self.stride = tf.convert_to_tensor(w.stride.numpy(), dtype=tf.float32)
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [tf.zeros(1)] * self.nl # init grid
+ self.anchors = tf.convert_to_tensor(w.anchors.numpy(), dtype=tf.float32)
+ self.anchor_grid = tf.reshape(self.anchors * tf.reshape(self.stride, [self.nl, 1, 1]), [self.nl, 1, -1, 1, 2])
+ self.m = [TFConv2d(x, self.no * self.na, 1, w=w.m[i]) for i, x in enumerate(ch)]
+ self.training = False # set to False after building model
+ self.imgsz = imgsz
+ for i in range(self.nl):
+ ny, nx = self.imgsz[0] // self.stride[i], self.imgsz[1] // self.stride[i]
+ self.grid[i] = self._make_grid(nx, ny)
+
+ def call(self, inputs):
+ z = [] # inference output
+ x = []
+ for i in range(self.nl):
+ x.append(self.m[i](inputs[i]))
+ # x(bs,20,20,255) to x(bs,3,20,20,85)
+ ny, nx = self.imgsz[0] // self.stride[i], self.imgsz[1] // self.stride[i]
+ x[i] = tf.reshape(x[i], [-1, ny * nx, self.na, self.no])
+
+ if not self.training: # inference
+ y = tf.sigmoid(x[i])
+ grid = tf.transpose(self.grid[i], [0, 2, 1, 3]) - 0.5
+ anchor_grid = tf.transpose(self.anchor_grid[i], [0, 2, 1, 3]) * 4
+ xy = (y[..., 0:2] * 2 + grid) * self.stride[i] # xy
+ wh = y[..., 2:4] ** 2 * anchor_grid
+ # Normalize xywh to 0-1 to reduce calibration error
+ xy /= tf.constant([[self.imgsz[1], self.imgsz[0]]], dtype=tf.float32)
+ wh /= tf.constant([[self.imgsz[1], self.imgsz[0]]], dtype=tf.float32)
+ y = tf.concat([xy, wh, y[..., 4:]], -1)
+ z.append(tf.reshape(y, [-1, self.na * ny * nx, self.no]))
+
+ return tf.transpose(x, [0, 2, 1, 3]) if self.training else (tf.concat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ # yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ # return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+ xv, yv = tf.meshgrid(tf.range(nx), tf.range(ny))
+ return tf.cast(tf.reshape(tf.stack([xv, yv], 2), [1, 1, ny * nx, 2]), dtype=tf.float32)
+
+
+class TFUpsample(keras.layers.Layer):
+ # TF version of torch.nn.Upsample()
+ def __init__(self, size, scale_factor, mode, w=None): # warning: all arguments needed including 'w'
+ super().__init__()
+ assert scale_factor == 2, "scale_factor must be 2"
+ self.upsample = lambda x: tf.image.resize(x, (x.shape[1] * 2, x.shape[2] * 2), method=mode)
+ # self.upsample = keras.layers.UpSampling2D(size=scale_factor, interpolation=mode)
+ # with default arguments: align_corners=False, half_pixel_centers=False
+ # self.upsample = lambda x: tf.raw_ops.ResizeNearestNeighbor(images=x,
+ # size=(x.shape[1] * 2, x.shape[2] * 2))
+
+ def call(self, inputs):
+ return self.upsample(inputs)
+
+
+class TFConcat(keras.layers.Layer):
+ # TF version of torch.concat()
+ def __init__(self, dimension=1, w=None):
+ super().__init__()
+ assert dimension == 1, "convert only NCHW to NHWC concat"
+ self.d = 3
+
+ def call(self, inputs):
+ return tf.concat(inputs, self.d)
+
+
+def parse_model(d, ch, model, imgsz): # model_dict, input_channels(3)
+ LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m_str = m
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ try:
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+ except NameError:
+ pass
+
+ n = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in [
+ nn.Conv2d, Conv, DWConv, DWConvTranspose2d, Bottleneck, SPP, SPPF, MixConv2d, Focus, CrossConv,
+ BottleneckCSP, C3, C3x]:
+ c1, c2 = ch[f], args[0]
+ c2 = make_divisible(c2 * gw, 8) if c2 != no else c2
+
+ args = [c1, c2, *args[1:]]
+ if m in [BottleneckCSP, C3, C3x]:
+ args.insert(2, n)
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum(ch[-1 if x == -1 else x + 1] for x in f)
+ elif m is Detect:
+ args.append([ch[x + 1] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ args.append(imgsz)
+ else:
+ c2 = ch[f]
+
+ tf_m = eval('TF' + m_str.replace('nn.', ''))
+ m_ = keras.Sequential([tf_m(*args, w=model.model[i][j]) for j in range(n)]) if n > 1 \
+ else tf_m(*args, w=model.model[i]) # module
+
+ torch_m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum(x.numel() for x in torch_m_.parameters()) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ LOGGER.info(f'{i:>3}{str(f):>18}{str(n):>3}{np:>10} {t:<40}{str(args):<30}') # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ ch.append(c2)
+ return keras.Sequential(layers), sorted(save)
+
+
+class TFModel:
+ # TF YOLOv5 model
+ def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None, model=None, imgsz=(640, 640)): # model, channels, classes
+ super().__init__()
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg) as f:
+ self.yaml = yaml.load(f, Loader=yaml.FullLoader) # model dict
+
+ # Define model
+ if nc and nc != self.yaml['nc']:
+ LOGGER.info(f"Overriding {cfg} nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ self.model, self.savelist = parse_model(deepcopy(self.yaml), ch=[ch], model=model, imgsz=imgsz)
+
+ def predict(self,
+ inputs,
+ tf_nms=False,
+ agnostic_nms=False,
+ topk_per_class=100,
+ topk_all=100,
+ iou_thres=0.45,
+ conf_thres=0.25):
+ y = [] # outputs
+ x = inputs
+ for m in self.model.layers:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+
+ x = m(x) # run
+ y.append(x if m.i in self.savelist else None) # save output
+
+ # Add TensorFlow NMS
+ if tf_nms:
+ boxes = self._xywh2xyxy(x[0][..., :4])
+ probs = x[0][:, :, 4:5]
+ classes = x[0][:, :, 5:]
+ scores = probs * classes
+ if agnostic_nms:
+ nms = AgnosticNMS()((boxes, classes, scores), topk_all, iou_thres, conf_thres)
+ else:
+ boxes = tf.expand_dims(boxes, 2)
+ nms = tf.image.combined_non_max_suppression(boxes,
+ scores,
+ topk_per_class,
+ topk_all,
+ iou_thres,
+ conf_thres,
+ clip_boxes=False)
+ return nms, x[1]
+ return x[0] # output only first tensor [1,6300,85] = [xywh, conf, class0, class1, ...]
+ # x = x[0][0] # [x(1,6300,85), ...] to x(6300,85)
+ # xywh = x[..., :4] # x(6300,4) boxes
+ # conf = x[..., 4:5] # x(6300,1) confidences
+ # cls = tf.reshape(tf.cast(tf.argmax(x[..., 5:], axis=1), tf.float32), (-1, 1)) # x(6300,1) classes
+ # return tf.concat([conf, cls, xywh], 1)
+
+ @staticmethod
+ def _xywh2xyxy(xywh):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ x, y, w, h = tf.split(xywh, num_or_size_splits=4, axis=-1)
+ return tf.concat([x - w / 2, y - h / 2, x + w / 2, y + h / 2], axis=-1)
+
+
+class AgnosticNMS(keras.layers.Layer):
+ # TF Agnostic NMS
+ def call(self, input, topk_all, iou_thres, conf_thres):
+ # wrap map_fn to avoid TypeSpec related error https://stackoverflow.com/a/65809989/3036450
+ return tf.map_fn(lambda x: self._nms(x, topk_all, iou_thres, conf_thres),
+ input,
+ fn_output_signature=(tf.float32, tf.float32, tf.float32, tf.int32),
+ name='agnostic_nms')
+
+ @staticmethod
+ def _nms(x, topk_all=100, iou_thres=0.45, conf_thres=0.25): # agnostic NMS
+ boxes, classes, scores = x
+ class_inds = tf.cast(tf.argmax(classes, axis=-1), tf.float32)
+ scores_inp = tf.reduce_max(scores, -1)
+ selected_inds = tf.image.non_max_suppression(boxes,
+ scores_inp,
+ max_output_size=topk_all,
+ iou_threshold=iou_thres,
+ score_threshold=conf_thres)
+ selected_boxes = tf.gather(boxes, selected_inds)
+ padded_boxes = tf.pad(selected_boxes,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]], [0, 0]],
+ mode="CONSTANT",
+ constant_values=0.0)
+ selected_scores = tf.gather(scores_inp, selected_inds)
+ padded_scores = tf.pad(selected_scores,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]]],
+ mode="CONSTANT",
+ constant_values=-1.0)
+ selected_classes = tf.gather(class_inds, selected_inds)
+ padded_classes = tf.pad(selected_classes,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]]],
+ mode="CONSTANT",
+ constant_values=-1.0)
+ valid_detections = tf.shape(selected_inds)[0]
+ return padded_boxes, padded_scores, padded_classes, valid_detections
+
+
+def activations(act=nn.SiLU):
+ # Returns TF activation from input PyTorch activation
+ if isinstance(act, nn.LeakyReLU):
+ return lambda x: keras.activations.relu(x, alpha=0.1)
+ elif isinstance(act, nn.Hardswish):
+ return lambda x: x * tf.nn.relu6(x + 3) * 0.166666667
+ elif isinstance(act, (nn.SiLU, SiLU)):
+ return lambda x: keras.activations.swish(x)
+ else:
+ raise Exception(f'no matching TensorFlow activation found for PyTorch activation {act}')
+
+
+def representative_dataset_gen(dataset, ncalib=100):
+ # Representative dataset generator for use with converter.representative_dataset, returns a generator of np arrays
+ for n, (path, img, im0s, vid_cap, string) in enumerate(dataset):
+ im = np.transpose(img, [1, 2, 0])
+ im = np.expand_dims(im, axis=0).astype(np.float32)
+ im /= 255
+ yield [im]
+ if n >= ncalib:
+ break
+
+
+def run(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=(640, 640), # inference size h,w
+ batch_size=1, # batch size
+ dynamic=False, # dynamic batch size
+):
+ # PyTorch model
+ im = torch.zeros((batch_size, 3, *imgsz)) # BCHW image
+ model = attempt_load(weights, device=torch.device('cpu'), inplace=True, fuse=False)
+ _ = model(im) # inference
+ model.info()
+
+ # TensorFlow model
+ im = tf.zeros((batch_size, *imgsz, 3)) # BHWC image
+ tf_model = TFModel(cfg=model.yaml, model=model, nc=model.nc, imgsz=imgsz)
+ _ = tf_model.predict(im) # inference
+
+ # Keras model
+ im = keras.Input(shape=(*imgsz, 3), batch_size=None if dynamic else batch_size)
+ keras_model = keras.Model(inputs=im, outputs=tf_model.predict(im))
+ keras_model.summary()
+
+ LOGGER.info('PyTorch, TensorFlow and Keras models successfully verified.\nUse export.py for TF model export.')
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='weights path')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--dynamic', action='store_true', help='dynamic batch size')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/cls/models/yolo.py b/yolov7_seg/cls/models/yolo.py
new file mode 100644
index 000000000..12340b822
--- /dev/null
+++ b/yolov7_seg/cls/models/yolo.py
@@ -0,0 +1,368 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+YOLO-specific modules
+
+Usage:
+ $ python path/to/models/yolo.py --cfg yolov5s.yaml
+"""
+
+import argparse
+import contextlib
+import os
+import platform
+import sys
+from copy import deepcopy
+from pathlib import Path
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+if platform.system() != 'Windows':
+ ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import *
+from models.experimental import *
+from utils.autoanchor import check_anchor_order
+from utils.general import LOGGER, check_version, check_yaml, make_divisible, print_args
+from utils.plots import feature_visualization
+from utils.torch_utils import (fuse_conv_and_bn, initialize_weights, model_info, profile, scale_img, select_device,
+ time_sync)
+
+try:
+ import thop # for FLOPs computation
+except ImportError:
+ thop = None
+
+
+class Detect(nn.Module):
+ stride = None # strides computed during build
+ onnx_dynamic = False # ONNX export parameter
+ export = False # export mode
+
+ def __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layer
+ super().__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ self.anchor_grid = [torch.zeros(1)] * self.nl # init anchor grid
+ self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+ self.inplace = inplace # use inplace ops (e.g. slice assignment)
+
+ def forward(self, x):
+ z = [] # inference output
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
+
+ y = x[i].sigmoid()
+ if self.inplace:
+ y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy
+ wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
+
+ def _make_grid(self, nx=20, ny=20, i=0):
+ d = self.anchors[i].device
+ t = self.anchors[i].dtype
+ shape = 1, self.na, ny, nx, 2 # grid shape
+ y, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)
+ if check_version(torch.__version__, '1.10.0'): # torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibility
+ yv, xv = torch.meshgrid(y, x, indexing='ij')
+ else:
+ yv, xv = torch.meshgrid(y, x)
+ grid = torch.stack((xv, yv), 2).expand(shape) - 0.5 # add grid offset, i.e. y = 2.0 * x - 0.5
+ anchor_grid = (self.anchors[i] * self.stride[i]).view((1, self.na, 1, 1, 2)).expand(shape)
+ return grid, anchor_grid
+
+
+class BaseModel(nn.Module):
+ # YOLOv5 base model
+ def forward(self, x, profile=False, visualize=False):
+ return self._forward_once(x, profile, visualize) # single-scale inference, train
+
+ def _forward_once(self, x, profile=False, visualize=False):
+ y, dt = [], [] # outputs
+ for m in self.model:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+ #if isinstance(m.f, int):
+ # if x is None:
+ # print(len(y))
+ # for yy in y:
+ # print(yy.shape)
+ # print(x.shape)
+ if profile:
+ self._profile_one_layer(m, x, dt)
+ x = m(x) # run
+ y.append(x if m.i in self.save else None) # save output
+ if visualize:
+ feature_visualization(x, m.type, m.i, save_dir=visualize)
+ return x
+
+ def _profile_one_layer(self, m, x, dt):
+ c = m == self.model[-1] # is final layer, copy input as inplace fix
+ o = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPs
+ t = time_sync()
+ for _ in range(10):
+ m(x.copy() if c else x)
+ dt.append((time_sync() - t) * 100)
+ if m == self.model[0]:
+ LOGGER.info(f"{'time (ms)':>10s} {'GFLOPs':>10s} {'params':>10s} module")
+ LOGGER.info(f'{dt[-1]:10.2f} {o:10.2f} {m.np:10.0f} {m.type}')
+ if c:
+ LOGGER.info(f"{sum(dt):10.2f} {'-':>10s} {'-':>10s} Total")
+
+ def fuse(self): # fuse model Conv2d() + BatchNorm2d() layers
+ LOGGER.info('Fusing layers... ')
+ for m in self.model.modules():
+ if isinstance(m, (Conv, DWConv)) and hasattr(m, 'bn'):
+ m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
+ delattr(m, 'bn') # remove batchnorm
+ m.forward = m.forward_fuse # update forward
+ self.info()
+ return self
+
+ def info(self, verbose=False, img_size=640): # print model information
+ model_info(self, verbose, img_size)
+
+ def _apply(self, fn):
+ # Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers
+ self = super()._apply(fn)
+ m = self.model[-1] # Detect()
+ if isinstance(m, Detect):
+ m.stride = fn(m.stride)
+ m.grid = list(map(fn, m.grid))
+ if isinstance(m.anchor_grid, list):
+ m.anchor_grid = list(map(fn, m.anchor_grid))
+ return self
+
+
+class DetectionModel(BaseModel):
+ # YOLOv5 detection model
+ def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classes
+ super().__init__()
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg, encoding='ascii', errors='ignore') as f:
+ self.yaml = yaml.safe_load(f) # model dict
+
+ # Define model
+ ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels
+ if nc and nc != self.yaml['nc']:
+ LOGGER.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ if anchors:
+ LOGGER.info(f'Overriding model.yaml anchors with anchors={anchors}')
+ self.yaml['anchors'] = round(anchors) # override yaml value
+ self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist
+ self.names = [str(i) for i in range(self.yaml['nc'])] # default names
+ self.inplace = self.yaml.get('inplace', True)
+
+ # Build strides, anchors
+ m = self.model[-1] # Detect()
+ if isinstance(m, Detect):
+ s = 256 # 2x min stride
+ m.inplace = self.inplace
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m) # must be in pixel-space (not grid-space)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+
+ # Init weights, biases
+ initialize_weights(self)
+ self.info()
+ LOGGER.info('')
+
+ def forward(self, x, augment=False, profile=False, visualize=False):
+ if augment:
+ return self._forward_augment(x) # augmented inference, None
+ return self._forward_once(x, profile, visualize) # single-scale inference, train
+
+ def _forward_augment(self, x):
+ img_size = x.shape[-2:] # height, width
+ s = [1, 0.83, 0.67] # scales
+ f = [None, 3, None] # flips (2-ud, 3-lr)
+ y = [] # outputs
+ for si, fi in zip(s, f):
+ xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
+ yi = self._forward_once(xi)[0] # forward
+ # cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # save
+ yi = self._descale_pred(yi, fi, si, img_size)
+ y.append(yi)
+ y = self._clip_augmented(y) # clip augmented tails
+ return torch.cat(y, 1), None # augmented inference, train
+
+ def _descale_pred(self, p, flips, scale, img_size):
+ # de-scale predictions following augmented inference (inverse operation)
+ if self.inplace:
+ p[..., :4] /= scale # de-scale
+ if flips == 2:
+ p[..., 1] = img_size[0] - p[..., 1] # de-flip ud
+ elif flips == 3:
+ p[..., 0] = img_size[1] - p[..., 0] # de-flip lr
+ else:
+ x, y, wh = p[..., 0:1] / scale, p[..., 1:2] / scale, p[..., 2:4] / scale # de-scale
+ if flips == 2:
+ y = img_size[0] - y # de-flip ud
+ elif flips == 3:
+ x = img_size[1] - x # de-flip lr
+ p = torch.cat((x, y, wh, p[..., 4:]), -1)
+ return p
+
+ def _clip_augmented(self, y):
+ # Clip YOLOv5 augmented inference tails
+ nl = self.model[-1].nl # number of detection layers (P3-P5)
+ g = sum(4 ** x for x in range(nl)) # grid points
+ e = 1 # exclude layer count
+ i = (y[0].shape[1] // g) * sum(4 ** x for x in range(e)) # indices
+ y[0] = y[0][:, :-i] # large
+ i = (y[-1].shape[1] // g) * sum(4 ** (nl - 1 - x) for x in range(e)) # indices
+ y[-1] = y[-1][:, i:] # small
+ return y
+
+ def _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1).detach() # conv.bias(255) to (3,85)
+ b[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b[:, 5:] += math.log(0.6 / (m.nc - 0.999999)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+
+Model = DetectionModel # retain YOLOv5 'Model' class for backwards compatibility
+
+
+class ClassificationModel(BaseModel):
+ # YOLOv5 classification model
+ def __init__(self, cfg=None, model=None, nc=1000, cutoff=10): # yaml, model, number of classes, cutoff index
+ super().__init__()
+ self.save = []
+ self._from_detection_model(model, nc, cutoff) if model is not None else self._from_yaml(cfg)
+
+ def _from_detection_model(self, model, nc=1000, cutoff=10):
+ # Create a YOLOv5 classification model from a YOLOv5 detection model
+ if isinstance(model, DetectMultiBackend):
+ model = model.model # unwrap DetectMultiBackend
+ model.model = model.model[:cutoff] # backbone
+ m = model.model[-1] # last layer
+ ch = m.conv.in_channels if hasattr(m, 'conv') else m.cv1.conv.in_channels # ch into module
+ c = Classify(ch, nc) # Classify()
+ c.i, c.f, c.type = m.i, m.f, 'models.common.Classify' # index, from, type
+ model.model[-1] = c # replace
+ self.model = model.model
+ self.stride = model.stride
+ #self.save = []
+ self.save = model.save
+ self.nc = nc
+
+ def _from_yaml(self, cfg):
+ # Create a YOLOv5 classification model from a *.yaml file
+ self.model = None
+
+
+def parse_model(d, ch): # model_dict, input_channels(3)
+ LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ with contextlib.suppress(NameError):
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+
+ n = n_ = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in (Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, MixConv2d, Focus, CrossConv,
+ BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x, SPPCSPC):
+ c1, c2 = ch[f], args[0]
+ if c2 != no: # if not output
+ c2 = make_divisible(c2 * gw, 8)
+
+ args = [c1, c2, *args[1:]]
+ if m in [BottleneckCSP, C3, C3TR, C3Ghost, C3x, SPPCSPC]:
+ args.insert(2, n) # number of repeats
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum(ch[x] for x in f)
+ elif m is Detect:
+ args.append([ch[x] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ elif m is Contract:
+ c2 = ch[f] * args[0] ** 2
+ elif m is Expand:
+ c2 = ch[f] // args[0] ** 2
+ else:
+ c2 = ch[f]
+
+ m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum(x.numel() for x in m_.parameters()) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ LOGGER.info(f'{i:>3}{str(f):>18}{n_:>3}{np:10.0f} {t:<40}{str(args):<30}') # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ if i == 0:
+ ch = []
+ ch.append(c2)
+ return nn.Sequential(*layers), sorted(save)
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--cfg', type=str, default='yolov5s.yaml', help='model.yaml')
+ parser.add_argument('--batch-size', type=int, default=1, help='total batch size for all GPUs')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--profile', action='store_true', help='profile model speed')
+ parser.add_argument('--line-profile', action='store_true', help='profile model speed layer by layer')
+ parser.add_argument('--test', action='store_true', help='test all yolo*.yaml')
+ opt = parser.parse_args()
+ opt.cfg = check_yaml(opt.cfg) # check YAML
+ print_args(vars(opt))
+ device = select_device(opt.device)
+
+ # Create model
+ im = torch.rand(opt.batch_size, 3, 640, 640).to(device)
+ model = Model(opt.cfg).to(device)
+
+ # Options
+ if opt.line_profile: # profile layer by layer
+ model(im, profile=True)
+
+ elif opt.profile: # profile forward-backward
+ results = profile(input=im, ops=[model], n=3)
+
+ elif opt.test: # test all models
+ for cfg in Path(ROOT / 'models').rglob('yolo*.yaml'):
+ try:
+ _ = Model(cfg)
+ except Exception as e:
+ print(f'Error in {cfg}: {e}')
+
+ else: # report fused model summary
+ model.fuse()
diff --git a/yolov7_seg/cls/models/yolov7.yaml b/yolov7_seg/cls/models/yolov7.yaml
new file mode 100644
index 000000000..2454ae821
--- /dev/null
+++ b/yolov7_seg/cls/models/yolov7.yaml
@@ -0,0 +1,140 @@
+# parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+
+# anchors
+anchors:
+ - [12,16, 19,36, 40,28] # P3/8
+ - [36,75, 76,55, 72,146] # P4/16
+ - [142,110, 192,243, 459,401] # P5/32
+
+# yolov7 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Conv, [64, 3, 1]],
+
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 1, Conv, [64, 1, 1]],
+ [-2, 1, Conv, [64, 1, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 11
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [128, 1, 1]],
+ [-3, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 16-P3/8
+ [-1, 1, Conv, [128, 1, 1]],
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [512, 1, 1]], # 24
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-3, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 29-P4/16
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [1024, 1, 1]], # 37
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-3, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [512, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 42-P5/32
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [1024, 1, 1]], # 50
+ ]
+
+# yolov7 head
+head:
+ [[-1, 1, SPPCSPC, [512]], # 51
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [37, 1, Conv, [256, 1, 1]], # route backbone P4
+ [[-1, -2], 1, Concat, [1]],
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 63
+
+ [-1, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [24, 1, Conv, [128, 1, 1]], # route backbone P3
+ [[-1, -2], 1, Concat, [1]],
+
+ [-1, 1, Conv, [128, 1, 1]],
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [128, 1, 1]], # 75
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [128, 1, 1]],
+ [-3, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 2]],
+ [[-1, -3, 63], 1, Concat, [1]],
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 88
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-3, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 2]],
+ [[-1, -3, 51], 1, Concat, [1]],
+
+ [-1, 1, Conv, [512, 1, 1]],
+ [-2, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [512, 1, 1]], # 101
+
+ [75, 1, Conv, [256, 3, 1]],
+ [88, 1, Conv, [512, 3, 1]],
+ [101, 1, Conv, [1024, 3, 1]],
+
+ [[102,103,104], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
+ ]
\ No newline at end of file
diff --git a/yolov7_seg/cls/requirements.txt b/yolov7_seg/cls/requirements.txt
new file mode 100644
index 000000000..0f282135e
--- /dev/null
+++ b/yolov7_seg/cls/requirements.txt
@@ -0,0 +1,43 @@
+# YOLOv5 requirements
+# Usage: pip install -r requirements.txt
+
+# Base ----------------------------------------
+matplotlib>=3.2.2
+numpy>=1.18.5
+opencv-python>=4.1.1
+Pillow>=7.1.2
+PyYAML>=5.3.1
+requests>=2.23.0
+scipy>=1.4.1
+torch>=1.7.0
+torchvision>=0.8.1
+tqdm>=4.64.0
+protobuf<=3.20.1 # https://github.com/ultralytics/yolov5/issues/8012
+
+# Logging -------------------------------------
+tensorboard>=2.4.1
+# wandb
+# clearml
+
+# Plotting ------------------------------------
+pandas>=1.1.4
+seaborn>=0.11.0
+
+# Export --------------------------------------
+# coremltools>=5.2 # CoreML export
+# onnx>=1.9.0 # ONNX export
+# onnx-simplifier>=0.4.1 # ONNX simplifier
+# nvidia-pyindex # TensorRT export
+# nvidia-tensorrt # TensorRT export
+# scikit-learn==0.19.2 # CoreML quantization
+# tensorflow>=2.4.1 # TFLite export (or tensorflow-cpu, tensorflow-aarch64)
+# tensorflowjs>=3.9.0 # TF.js export
+# openvino-dev # OpenVINO export
+
+# Extras --------------------------------------
+ipython # interactive notebook
+psutil # system utilization
+thop>=0.1.1 # FLOPs computation
+# albumentations>=1.0.3
+# pycocotools>=2.0 # COCO mAP
+# roboflow
diff --git a/yolov7_seg/cls/setup.cfg b/yolov7_seg/cls/setup.cfg
new file mode 100644
index 000000000..b6b2e1840
--- /dev/null
+++ b/yolov7_seg/cls/setup.cfg
@@ -0,0 +1,59 @@
+# Project-wide configuration file, can be used for package metadata and other toll configurations
+# Example usage: global configuration for PEP8 (via flake8) setting or default pytest arguments
+# Local usage: pip install pre-commit, pre-commit run --all-files
+
+[metadata]
+license_file = LICENSE
+description_file = README.md
+
+
+[tool:pytest]
+norecursedirs =
+ .git
+ dist
+ build
+addopts =
+ --doctest-modules
+ --durations=25
+ --color=yes
+
+
+[flake8]
+max-line-length = 120
+exclude = .tox,*.egg,build,temp
+select = E,W,F
+doctests = True
+verbose = 2
+# https://pep8.readthedocs.io/en/latest/intro.html#error-codes
+format = pylint
+# see: https://www.flake8rules.com/
+ignore =
+ E731 # Do not assign a lambda expression, use a def
+ F405 # name may be undefined, or defined from star imports: module
+ E402 # module level import not at top of file
+ F401 # module imported but unused
+ W504 # line break after binary operator
+ E127 # continuation line over-indented for visual indent
+ W504 # line break after binary operator
+ E231 # missing whitespace after ‘,’, ‘;’, or ‘:’
+ E501 # line too long
+ F403 # ‘from module import *’ used; unable to detect undefined names
+
+
+[isort]
+# https://pycqa.github.io/isort/docs/configuration/options.html
+line_length = 120
+# see: https://pycqa.github.io/isort/docs/configuration/multi_line_output_modes.html
+multi_line_output = 0
+
+
+[yapf]
+based_on_style = pep8
+spaces_before_comment = 2
+COLUMN_LIMIT = 120
+COALESCE_BRACKETS = True
+SPACES_AROUND_POWER_OPERATOR = True
+SPACE_BETWEEN_ENDING_COMMA_AND_CLOSING_BRACKET = False
+SPLIT_BEFORE_CLOSING_BRACKET = False
+SPLIT_BEFORE_FIRST_ARGUMENT = False
+# EACH_DICT_ENTRY_ON_SEPARATE_LINE = False
diff --git a/yolov7_seg/cls/train.py b/yolov7_seg/cls/train.py
new file mode 100644
index 000000000..53f2a5fe9
--- /dev/null
+++ b/yolov7_seg/cls/train.py
@@ -0,0 +1,634 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Train a YOLOv5 model on a custom dataset.
+
+Models and datasets download automatically from the latest YOLOv5 release.
+Models: https://github.com/ultralytics/yolov5/tree/master/models
+Datasets: https://github.com/ultralytics/yolov5/tree/master/data
+Tutorial: https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data
+
+Usage:
+ $ python path/to/train.py --data coco128.yaml --weights yolov5s.pt --img 640 # from pretrained (RECOMMENDED)
+ $ python path/to/train.py --data coco128.yaml --weights '' --cfg yolov5s.yaml --img 640 # from scratch
+"""
+
+import argparse
+import math
+import os
+import random
+import sys
+import time
+from copy import deepcopy
+from datetime import datetime
+from pathlib import Path
+
+import numpy as np
+import torch
+import torch.distributed as dist
+import torch.nn as nn
+import yaml
+from torch.optim import lr_scheduler
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+import val # for end-of-epoch mAP
+from models.experimental import attempt_load
+from models.yolo import Model
+from utils.autoanchor import check_anchors
+from utils.autobatch import check_train_batch_size
+from utils.callbacks import Callbacks
+from utils.dataloaders import create_dataloader
+from utils.downloads import attempt_download, is_url
+from utils.general import (LOGGER, check_amp, check_dataset, check_file, check_git_status, check_img_size,
+ check_requirements, check_suffix, check_yaml, colorstr, get_latest_run, increment_path,
+ init_seeds, intersect_dicts, labels_to_class_weights, labels_to_image_weights, methods,
+ one_cycle, print_args, print_mutation, strip_optimizer)
+from utils.loggers import Loggers
+from utils.loggers.wandb.wandb_utils import check_wandb_resume
+from utils.loss import ComputeLoss
+from utils.metrics import fitness
+from utils.plots import plot_evolve, plot_labels
+from utils.torch_utils import (EarlyStopping, ModelEMA, de_parallel, select_device, smart_DDP, smart_optimizer,
+ smart_resume, torch_distributed_zero_first)
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+
+def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictionary
+ save_dir, epochs, batch_size, weights, single_cls, evolve, data, cfg, resume, noval, nosave, workers, freeze = \
+ Path(opt.save_dir), opt.epochs, opt.batch_size, opt.weights, opt.single_cls, opt.evolve, opt.data, opt.cfg, \
+ opt.resume, opt.noval, opt.nosave, opt.workers, opt.freeze
+ callbacks.run('on_pretrain_routine_start')
+
+ # Directories
+ w = save_dir / 'weights' # weights dir
+ (w.parent if evolve else w).mkdir(parents=True, exist_ok=True) # make dir
+ last, best = w / 'last.pt', w / 'best.pt'
+
+ # Hyperparameters
+ if isinstance(hyp, str):
+ with open(hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ LOGGER.info(colorstr('hyperparameters: ') + ', '.join(f'{k}={v}' for k, v in hyp.items()))
+ opt.hyp = hyp.copy() # for saving hyps to checkpoints
+
+ # Save run settings
+ if not evolve:
+ with open(save_dir / 'hyp.yaml', 'w') as f:
+ yaml.safe_dump(hyp, f, sort_keys=False)
+ with open(save_dir / 'opt.yaml', 'w') as f:
+ yaml.safe_dump(vars(opt), f, sort_keys=False)
+
+ # Loggers
+ data_dict = None
+ if RANK in {-1, 0}:
+ loggers = Loggers(save_dir, weights, opt, hyp, LOGGER) # loggers instance
+ if loggers.clearml:
+ data_dict = loggers.clearml.data_dict # None if no ClearML dataset or filled in by ClearML
+ if loggers.wandb:
+ data_dict = loggers.wandb.data_dict
+ if resume:
+ weights, epochs, hyp, batch_size = opt.weights, opt.epochs, opt.hyp, opt.batch_size
+
+ # Register actions
+ for k in methods(loggers):
+ callbacks.register_action(k, callback=getattr(loggers, k))
+
+ # Config
+ plots = not evolve and not opt.noplots # create plots
+ cuda = device.type != 'cpu'
+ init_seeds(opt.seed + 1 + RANK, deterministic=True)
+ with torch_distributed_zero_first(LOCAL_RANK):
+ data_dict = data_dict or check_dataset(data) # check if None
+ train_path, val_path = data_dict['train'], data_dict['val']
+ nc = 1 if single_cls else int(data_dict['nc']) # number of classes
+ names = ['item'] if single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
+ assert len(names) == nc, f'{len(names)} names found for nc={nc} dataset in {data}' # check
+ is_coco = isinstance(val_path, str) and val_path.endswith('coco/val2017.txt') # COCO dataset
+
+ # Model
+ check_suffix(weights, '.pt') # check weights
+ pretrained = weights.endswith('.pt')
+ if pretrained:
+ with torch_distributed_zero_first(LOCAL_RANK):
+ weights = attempt_download(weights) # download if not found locally
+ ckpt = torch.load(weights, map_location='cpu') # load checkpoint to CPU to avoid CUDA memory leak
+ model = Model(cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ exclude = ['anchor'] if (cfg or hyp.get('anchors')) and not resume else [] # exclude keys
+ csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
+ csd = intersect_dicts(csd, model.state_dict(), exclude=exclude) # intersect
+ model.load_state_dict(csd, strict=False) # load
+ LOGGER.info(f'Transferred {len(csd)}/{len(model.state_dict())} items from {weights}') # report
+ else:
+ model = Model(cfg, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ amp = check_amp(model) # check AMP
+
+ # Freeze
+ freeze = [f'model.{x}.' for x in (freeze if len(freeze) > 1 else range(freeze[0]))] # layers to freeze
+ for k, v in model.named_parameters():
+ v.requires_grad = True # train all layers
+ # v.register_hook(lambda x: torch.nan_to_num(x)) # NaN to 0 (commented for erratic training results)
+ if any(x in k for x in freeze):
+ LOGGER.info(f'freezing {k}')
+ v.requires_grad = False
+
+ # Image size
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ imgsz = check_img_size(opt.imgsz, gs, floor=gs * 2) # verify imgsz is gs-multiple
+
+ # Batch size
+ if RANK == -1 and batch_size == -1: # single-GPU only, estimate best batch size
+ batch_size = check_train_batch_size(model, imgsz, amp)
+ loggers.on_params_update({"batch_size": batch_size})
+
+ # Optimizer
+ nbs = 64 # nominal batch size
+ accumulate = max(round(nbs / batch_size), 1) # accumulate loss before optimizing
+ hyp['weight_decay'] *= batch_size * accumulate / nbs # scale weight_decay
+ optimizer = smart_optimizer(model, opt.optimizer, hyp['lr0'], hyp['momentum'], hyp['weight_decay'])
+
+ # Scheduler
+ if opt.cos_lr:
+ lf = one_cycle(1, hyp['lrf'], epochs) # cosine 1->hyp['lrf']
+ else:
+ lf = lambda x: (1 - x / epochs) * (1.0 - hyp['lrf']) + hyp['lrf'] # linear
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf) # plot_lr_scheduler(optimizer, scheduler, epochs)
+
+ # EMA
+ ema = ModelEMA(model) if RANK in {-1, 0} else None
+
+ # Resume
+ best_fitness, start_epoch = 0.0, 0
+ if pretrained:
+ best_fitness, start_epoch, epochs = smart_resume(ckpt, optimizer, ema, weights, epochs, resume)
+ del ckpt, csd
+
+ # DP mode
+ if cuda and RANK == -1 and torch.cuda.device_count() > 1:
+ LOGGER.warning('WARNING: DP not recommended, use torch.distributed.run for best DDP Multi-GPU results.\n'
+ 'See Multi-GPU Tutorial at https://github.com/ultralytics/yolov5/issues/475 to get started.')
+ model = torch.nn.DataParallel(model)
+
+ # SyncBatchNorm
+ if opt.sync_bn and cuda and RANK != -1:
+ model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
+ LOGGER.info('Using SyncBatchNorm()')
+
+ # Trainloader
+ train_loader, dataset = create_dataloader(train_path,
+ imgsz,
+ batch_size // WORLD_SIZE,
+ gs,
+ single_cls,
+ hyp=hyp,
+ augment=True,
+ cache=None if opt.cache == 'val' else opt.cache,
+ rect=opt.rect,
+ rank=LOCAL_RANK,
+ workers=workers,
+ image_weights=opt.image_weights,
+ quad=opt.quad,
+ prefix=colorstr('train: '),
+ shuffle=True)
+ labels = np.concatenate(dataset.labels, 0)
+ mlc = int(labels[:, 0].max()) # max label class
+ assert mlc < nc, f'Label class {mlc} exceeds nc={nc} in {data}. Possible class labels are 0-{nc - 1}'
+
+ # Process 0
+ if RANK in {-1, 0}:
+ val_loader = create_dataloader(val_path,
+ imgsz,
+ batch_size // WORLD_SIZE * 2,
+ gs,
+ single_cls,
+ hyp=hyp,
+ cache=None if noval else opt.cache,
+ rect=True,
+ rank=-1,
+ workers=workers * 2,
+ pad=0.5,
+ prefix=colorstr('val: '))[0]
+
+ if not resume:
+ if plots:
+ plot_labels(labels, names, save_dir)
+
+ # Anchors
+ if not opt.noautoanchor:
+ check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz)
+ model.half().float() # pre-reduce anchor precision
+
+ callbacks.run('on_pretrain_routine_end')
+
+ # DDP mode
+ if cuda and RANK != -1:
+ model = smart_DDP(model)
+
+ # Model attributes
+ nl = de_parallel(model).model[-1].nl # number of detection layers (to scale hyps)
+ hyp['box'] *= 3 / nl # scale to layers
+ hyp['cls'] *= nc / 80 * 3 / nl # scale to classes and layers
+ hyp['obj'] *= (imgsz / 640) ** 2 * 3 / nl # scale to image size and layers
+ hyp['label_smoothing'] = opt.label_smoothing
+ model.nc = nc # attach number of classes to model
+ model.hyp = hyp # attach hyperparameters to model
+ model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
+ model.names = names
+
+ # Start training
+ t0 = time.time()
+ nb = len(train_loader) # number of batches
+ nw = max(round(hyp['warmup_epochs'] * nb), 100) # number of warmup iterations, max(3 epochs, 100 iterations)
+ # nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
+ last_opt_step = -1
+ maps = np.zeros(nc) # mAP per class
+ results = (0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
+ scheduler.last_epoch = start_epoch - 1 # do not move
+ scaler = torch.cuda.amp.GradScaler(enabled=amp)
+ stopper, stop = EarlyStopping(patience=opt.patience), False
+ compute_loss = ComputeLoss(model) # init loss class
+ callbacks.run('on_train_start')
+ LOGGER.info(f'Image sizes {imgsz} train, {imgsz} val\n'
+ f'Using {train_loader.num_workers * WORLD_SIZE} dataloader workers\n'
+ f"Logging results to {colorstr('bold', save_dir)}\n"
+ f'Starting training for {epochs} epochs...')
+ for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
+ callbacks.run('on_train_epoch_start')
+ model.train()
+
+ # Update image weights (optional, single-GPU only)
+ if opt.image_weights:
+ cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
+ iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
+ dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
+
+ # Update mosaic border (optional)
+ # b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
+ # dataset.mosaic_border = [b - imgsz, -b] # height, width borders
+
+ mloss = torch.zeros(3, device=device) # mean losses
+ if RANK != -1:
+ train_loader.sampler.set_epoch(epoch)
+ pbar = enumerate(train_loader)
+ LOGGER.info(('\n' + '%10s' * 7) % ('Epoch', 'gpu_mem', 'box', 'obj', 'cls', 'labels', 'img_size'))
+ if RANK in {-1, 0}:
+ pbar = tqdm(pbar, total=nb, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ optimizer.zero_grad()
+ for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
+ callbacks.run('on_train_batch_start')
+ ni = i + nb * epoch # number integrated batches (since train start)
+ imgs = imgs.to(device, non_blocking=True).float() / 255 # uint8 to float32, 0-255 to 0.0-1.0
+
+ # Warmup
+ if ni <= nw:
+ xi = [0, nw] # x interp
+ # compute_loss.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
+ accumulate = max(1, np.interp(ni, xi, [1, nbs / batch_size]).round())
+ for j, x in enumerate(optimizer.param_groups):
+ # bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
+ x['lr'] = np.interp(ni, xi, [hyp['warmup_bias_lr'] if j == 0 else 0.0, x['initial_lr'] * lf(epoch)])
+ if 'momentum' in x:
+ x['momentum'] = np.interp(ni, xi, [hyp['warmup_momentum'], hyp['momentum']])
+
+ # Multi-scale
+ if opt.multi_scale:
+ sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
+ sf = sz / max(imgs.shape[2:]) # scale factor
+ if sf != 1:
+ ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
+ imgs = nn.functional.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)
+
+ # Forward
+ with torch.cuda.amp.autocast(amp):
+ pred = model(imgs) # forward
+ loss, loss_items = compute_loss(pred, targets.to(device)) # loss scaled by batch_size
+ if RANK != -1:
+ loss *= WORLD_SIZE # gradient averaged between devices in DDP mode
+ if opt.quad:
+ loss *= 4.
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize - https://pytorch.org/docs/master/notes/amp_examples.html
+ if ni - last_opt_step >= accumulate:
+ scaler.unscale_(optimizer) # unscale gradients
+ torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=10.0) # clip gradients
+ scaler.step(optimizer) # optimizer.step
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+ last_opt_step = ni
+
+ # Log
+ if RANK in {-1, 0}:
+ mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
+ mem = f'{torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0:.3g}G' # (GB)
+ pbar.set_description(('%10s' * 2 + '%10.4g' * 5) %
+ (f'{epoch}/{epochs - 1}', mem, *mloss, targets.shape[0], imgs.shape[-1]))
+ callbacks.run('on_train_batch_end', ni, model, imgs, targets, paths, plots)
+ if callbacks.stop_training:
+ return
+ # end batch ------------------------------------------------------------------------------------------------
+
+ # Scheduler
+ lr = [x['lr'] for x in optimizer.param_groups] # for loggers
+ scheduler.step()
+
+ if RANK in {-1, 0}:
+ # mAP
+ callbacks.run('on_train_epoch_end', epoch=epoch)
+ ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'names', 'stride', 'class_weights'])
+ final_epoch = (epoch + 1 == epochs) or stopper.possible_stop
+ if not noval or final_epoch: # Calculate mAP
+ results, maps, _ = val.run(data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ half=amp,
+ model=ema.ema,
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ plots=False,
+ callbacks=callbacks,
+ compute_loss=compute_loss)
+
+ # Update best mAP
+ fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
+ stop = stopper(epoch=epoch, fitness=fi) # early stop check
+ if fi > best_fitness:
+ best_fitness = fi
+ log_vals = list(mloss) + list(results) + lr
+ callbacks.run('on_fit_epoch_end', log_vals, epoch, best_fitness, fi)
+
+ # Save model
+ if (not nosave) or (final_epoch and not evolve): # if save
+ ckpt = {
+ 'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'model': deepcopy(de_parallel(model)).half(),
+ 'ema': deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': optimizer.state_dict(),
+ 'wandb_id': loggers.wandb.wandb_run.id if loggers.wandb else None,
+ 'opt': vars(opt),
+ 'date': datetime.now().isoformat()}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fi:
+ torch.save(ckpt, best)
+ if opt.save_period > 0 and epoch % opt.save_period == 0:
+ torch.save(ckpt, w / f'epoch{epoch}.pt')
+ del ckpt
+ callbacks.run('on_model_save', last, epoch, final_epoch, best_fitness, fi)
+
+ # EarlyStopping
+ if RANK != -1: # if DDP training
+ broadcast_list = [stop if RANK == 0 else None]
+ dist.broadcast_object_list(broadcast_list, 0) # broadcast 'stop' to all ranks
+ if RANK != 0:
+ stop = broadcast_list[0]
+ if stop:
+ break # must break all DDP ranks
+
+ # end epoch ----------------------------------------------------------------------------------------------------
+ # end training -----------------------------------------------------------------------------------------------------
+ if RANK in {-1, 0}:
+ LOGGER.info(f'\n{epoch - start_epoch + 1} epochs completed in {(time.time() - t0) / 3600:.3f} hours.')
+ for f in last, best:
+ if f.exists():
+ strip_optimizer(f) # strip optimizers
+ if f is best:
+ LOGGER.info(f'\nValidating {f}...')
+ results, _, _ = val.run(
+ data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ model=attempt_load(f, device).half(),
+ iou_thres=0.65 if is_coco else 0.60, # best pycocotools results at 0.65
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ save_json=is_coco,
+ verbose=True,
+ plots=plots,
+ callbacks=callbacks,
+ compute_loss=compute_loss) # val best model with plots
+ if is_coco:
+ callbacks.run('on_fit_epoch_end', list(mloss) + list(results) + lr, epoch, best_fitness, fi)
+
+ callbacks.run('on_train_end', last, best, plots, epoch, results)
+
+ torch.cuda.empty_cache()
+ return results
+
+
+def parse_opt(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch-low.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300)
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--noval', action='store_true', help='only validate final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable AutoAnchor')
+ parser.add_argument('--noplots', action='store_true', help='save no plot files')
+ parser.add_argument('--evolve', type=int, nargs='?', const=300, help='evolve hyperparameters for x generations')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--optimizer', type=str, choices=['SGD', 'Adam', 'AdamW'], default='SGD', help='optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default=ROOT / 'runs/train', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--cos-lr', action='store_true', help='cosine LR scheduler')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--patience', type=int, default=100, help='EarlyStopping patience (epochs without improvement)')
+ parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone=10, first3=0 1 2')
+ parser.add_argument('--save-period', type=int, default=-1, help='Save checkpoint every x epochs (disabled if < 1)')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+
+ # Weights & Biases arguments
+ parser.add_argument('--entity', default=None, help='W&B: Entity')
+ parser.add_argument('--upload_dataset', nargs='?', const=True, default=False, help='W&B: Upload data, "val" option')
+ parser.add_argument('--bbox_interval', type=int, default=-1, help='W&B: Set bounding-box image logging interval')
+ parser.add_argument('--artifact_alias', type=str, default='latest', help='W&B: Version of dataset artifact to use')
+
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def main(opt, callbacks=Callbacks()):
+ # Checks
+ if RANK in {-1, 0}:
+ print_args(vars(opt))
+ check_git_status()
+ check_requirements()
+
+ # Resume
+ if opt.resume and not (check_wandb_resume(opt) or opt.evolve): # resume from specified or most recent last.pt
+ last = Path(check_file(opt.resume) if isinstance(opt.resume, str) else get_latest_run())
+ opt_yaml = last.parent.parent / 'opt.yaml' # train options yaml
+ opt_data = opt.data # original dataset
+ if opt_yaml.is_file():
+ with open(opt_yaml, errors='ignore') as f:
+ d = yaml.safe_load(f)
+ else:
+ d = torch.load(last, map_location='cpu')['opt']
+ opt = argparse.Namespace(**d) # replace
+ opt.cfg, opt.weights, opt.resume = '', str(last), True # reinstate
+ if is_url(opt_data):
+ opt.data = check_file(opt_data) # avoid HUB resume auth timeout
+ else:
+ opt.data, opt.cfg, opt.hyp, opt.weights, opt.project = \
+ check_file(opt.data), check_yaml(opt.cfg), check_yaml(opt.hyp), str(opt.weights), str(opt.project) # checks
+ assert len(opt.cfg) or len(opt.weights), 'either --cfg or --weights must be specified'
+ if opt.evolve:
+ if opt.project == str(ROOT / 'runs/train'): # if default project name, rename to runs/evolve
+ opt.project = str(ROOT / 'runs/evolve')
+ opt.exist_ok, opt.resume = opt.resume, False # pass resume to exist_ok and disable resume
+ if opt.name == 'cfg':
+ opt.name = Path(opt.cfg).stem # use model.yaml as name
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok))
+
+ # DDP mode
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if LOCAL_RANK != -1:
+ msg = 'is not compatible with YOLOv5 Multi-GPU DDP training'
+ assert not opt.image_weights, f'--image-weights {msg}'
+ assert not opt.evolve, f'--evolve {msg}'
+ assert opt.batch_size != -1, f'AutoBatch with --batch-size -1 {msg}, please pass a valid --batch-size'
+ assert opt.batch_size % WORLD_SIZE == 0, f'--batch-size {opt.batch_size} must be multiple of WORLD_SIZE'
+ assert torch.cuda.device_count() > LOCAL_RANK, 'insufficient CUDA devices for DDP command'
+ torch.cuda.set_device(LOCAL_RANK)
+ device = torch.device('cuda', LOCAL_RANK)
+ dist.init_process_group(backend="nccl" if dist.is_nccl_available() else "gloo")
+
+ # Train
+ if not opt.evolve:
+ train(opt.hyp, opt, device, callbacks)
+ if WORLD_SIZE > 1 and RANK == 0:
+ LOGGER.info('Destroying process group... ')
+ dist.destroy_process_group()
+
+ # Evolve hyperparameters (optional)
+ else:
+ # Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)
+ meta = {
+ 'lr0': (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
+ 'lrf': (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
+ 'momentum': (0.3, 0.6, 0.98), # SGD momentum/Adam beta1
+ 'weight_decay': (1, 0.0, 0.001), # optimizer weight decay
+ 'warmup_epochs': (1, 0.0, 5.0), # warmup epochs (fractions ok)
+ 'warmup_momentum': (1, 0.0, 0.95), # warmup initial momentum
+ 'warmup_bias_lr': (1, 0.0, 0.2), # warmup initial bias lr
+ 'box': (1, 0.02, 0.2), # box loss gain
+ 'cls': (1, 0.2, 4.0), # cls loss gain
+ 'cls_pw': (1, 0.5, 2.0), # cls BCELoss positive_weight
+ 'obj': (1, 0.2, 4.0), # obj loss gain (scale with pixels)
+ 'obj_pw': (1, 0.5, 2.0), # obj BCELoss positive_weight
+ 'iou_t': (0, 0.1, 0.7), # IoU training threshold
+ 'anchor_t': (1, 2.0, 8.0), # anchor-multiple threshold
+ 'anchors': (2, 2.0, 10.0), # anchors per output grid (0 to ignore)
+ 'fl_gamma': (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
+ 'hsv_h': (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
+ 'hsv_s': (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
+ 'hsv_v': (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)
+ 'degrees': (1, 0.0, 45.0), # image rotation (+/- deg)
+ 'translate': (1, 0.0, 0.9), # image translation (+/- fraction)
+ 'scale': (1, 0.0, 0.9), # image scale (+/- gain)
+ 'shear': (1, 0.0, 10.0), # image shear (+/- deg)
+ 'perspective': (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
+ 'flipud': (1, 0.0, 1.0), # image flip up-down (probability)
+ 'fliplr': (0, 0.0, 1.0), # image flip left-right (probability)
+ 'mosaic': (1, 0.0, 1.0), # image mixup (probability)
+ 'mixup': (1, 0.0, 1.0), # image mixup (probability)
+ 'copy_paste': (1, 0.0, 1.0)} # segment copy-paste (probability)
+
+ with open(opt.hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ if 'anchors' not in hyp: # anchors commented in hyp.yaml
+ hyp['anchors'] = 3
+ opt.noval, opt.nosave, save_dir = True, True, Path(opt.save_dir) # only val/save final epoch
+ # ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
+ evolve_yaml, evolve_csv = save_dir / 'hyp_evolve.yaml', save_dir / 'evolve.csv'
+ if opt.bucket:
+ os.system(f'gsutil cp gs://{opt.bucket}/evolve.csv {evolve_csv}') # download evolve.csv if exists
+
+ for _ in range(opt.evolve): # generations to evolve
+ if evolve_csv.exists(): # if evolve.csv exists: select best hyps and mutate
+ # Select parent(s)
+ parent = 'single' # parent selection method: 'single' or 'weighted'
+ x = np.loadtxt(evolve_csv, ndmin=2, delimiter=',', skiprows=1)
+ n = min(5, len(x)) # number of previous results to consider
+ x = x[np.argsort(-fitness(x))][:n] # top n mutations
+ w = fitness(x) - fitness(x).min() + 1E-6 # weights (sum > 0)
+ if parent == 'single' or len(x) == 1:
+ # x = x[random.randint(0, n - 1)] # random selection
+ x = x[random.choices(range(n), weights=w)[0]] # weighted selection
+ elif parent == 'weighted':
+ x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
+
+ # Mutate
+ mp, s = 0.8, 0.2 # mutation probability, sigma
+ npr = np.random
+ npr.seed(int(time.time()))
+ g = np.array([meta[k][0] for k in hyp.keys()]) # gains 0-1
+ ng = len(meta)
+ v = np.ones(ng)
+ while all(v == 1): # mutate until a change occurs (prevent duplicates)
+ v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
+ for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
+ hyp[k] = float(x[i + 7] * v[i]) # mutate
+
+ # Constrain to limits
+ for k, v in meta.items():
+ hyp[k] = max(hyp[k], v[1]) # lower limit
+ hyp[k] = min(hyp[k], v[2]) # upper limit
+ hyp[k] = round(hyp[k], 5) # significant digits
+
+ # Train mutation
+ results = train(hyp.copy(), opt, device, callbacks)
+ callbacks = Callbacks()
+ # Write mutation results
+ print_mutation(results, hyp.copy(), save_dir, opt.bucket)
+
+ # Plot results
+ plot_evolve(evolve_csv)
+ LOGGER.info(f'Hyperparameter evolution finished {opt.evolve} generations\n'
+ f"Results saved to {colorstr('bold', save_dir)}\n"
+ f'Usage example: $ python train.py --hyp {evolve_yaml}')
+
+
+def run(**kwargs):
+ # Usage: import train; train.run(data='coco128.yaml', imgsz=320, weights='yolov5m.pt')
+ opt = parse_opt(True)
+ for k, v in kwargs.items():
+ setattr(opt, k, v)
+ main(opt)
+ return opt
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/cls/utils/__init__.py b/yolov7_seg/cls/utils/__init__.py
new file mode 100644
index 000000000..a63c473a4
--- /dev/null
+++ b/yolov7_seg/cls/utils/__init__.py
@@ -0,0 +1,36 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+utils/initialization
+"""
+
+
+def notebook_init(verbose=True):
+ # Check system software and hardware
+ print('Checking setup...')
+
+ import os
+ import shutil
+
+ from utils.general import check_requirements, emojis, is_colab
+ from utils.torch_utils import select_device # imports
+
+ check_requirements(('psutil', 'IPython'))
+ import psutil
+ from IPython import display # to display images and clear console output
+
+ if is_colab():
+ shutil.rmtree('/content/sample_data', ignore_errors=True) # remove colab /sample_data directory
+
+ # System info
+ if verbose:
+ gb = 1 << 30 # bytes to GiB (1024 ** 3)
+ ram = psutil.virtual_memory().total
+ total, used, free = shutil.disk_usage("/")
+ display.clear_output()
+ s = f'({os.cpu_count()} CPUs, {ram / gb:.1f} GB RAM, {(total - free) / gb:.1f}/{total / gb:.1f} GB disk)'
+ else:
+ s = ''
+
+ select_device(newline=False)
+ print(emojis(f'Setup complete ✅ {s}'))
+ return display
diff --git a/yolov7_seg/cls/utils/activations.py b/yolov7_seg/cls/utils/activations.py
new file mode 100644
index 000000000..03d394e11
--- /dev/null
+++ b/yolov7_seg/cls/utils/activations.py
@@ -0,0 +1,103 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Activation functions
+"""
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+
+class SiLU(nn.Module):
+ # SiLU activation https://arxiv.org/pdf/1606.08415.pdf
+ @staticmethod
+ def forward(x):
+ return x * torch.sigmoid(x)
+
+
+class Hardswish(nn.Module):
+ # Hard-SiLU activation
+ @staticmethod
+ def forward(x):
+ # return x * F.hardsigmoid(x) # for TorchScript and CoreML
+ return x * F.hardtanh(x + 3, 0.0, 6.0) / 6.0 # for TorchScript, CoreML and ONNX
+
+
+class Mish(nn.Module):
+ # Mish activation https://github.com/digantamisra98/Mish
+ @staticmethod
+ def forward(x):
+ return x * F.softplus(x).tanh()
+
+
+class MemoryEfficientMish(nn.Module):
+ # Mish activation memory-efficient
+ class F(torch.autograd.Function):
+
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ fx = F.softplus(x).tanh()
+ return grad_output * (fx + x * sx * (1 - fx * fx))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+class FReLU(nn.Module):
+ # FReLU activation https://arxiv.org/abs/2007.11824
+ def __init__(self, c1, k=3): # ch_in, kernel
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
+ self.bn = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ return torch.max(x, self.bn(self.conv(x)))
+
+
+class AconC(nn.Module):
+ r""" ACON activation (activate or not)
+ AconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is a learnable parameter
+ according to "Activate or Not: Learning Customized Activation" .
+ """
+
+ def __init__(self, c1):
+ super().__init__()
+ self.p1 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.p2 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.beta = nn.Parameter(torch.ones(1, c1, 1, 1))
+
+ def forward(self, x):
+ dpx = (self.p1 - self.p2) * x
+ return dpx * torch.sigmoid(self.beta * dpx) + self.p2 * x
+
+
+class MetaAconC(nn.Module):
+ r""" ACON activation (activate or not)
+ MetaAconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is generated by a small network
+ according to "Activate or Not: Learning Customized Activation" .
+ """
+
+ def __init__(self, c1, k=1, s=1, r=16): # ch_in, kernel, stride, r
+ super().__init__()
+ c2 = max(r, c1 // r)
+ self.p1 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.p2 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.fc1 = nn.Conv2d(c1, c2, k, s, bias=True)
+ self.fc2 = nn.Conv2d(c2, c1, k, s, bias=True)
+ # self.bn1 = nn.BatchNorm2d(c2)
+ # self.bn2 = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ y = x.mean(dim=2, keepdims=True).mean(dim=3, keepdims=True)
+ # batch-size 1 bug/instabilities https://github.com/ultralytics/yolov5/issues/2891
+ # beta = torch.sigmoid(self.bn2(self.fc2(self.bn1(self.fc1(y))))) # bug/unstable
+ beta = torch.sigmoid(self.fc2(self.fc1(y))) # bug patch BN layers removed
+ dpx = (self.p1 - self.p2) * x
+ return dpx * torch.sigmoid(beta * dpx) + self.p2 * x
diff --git a/yolov7_seg/cls/utils/augmentations.py b/yolov7_seg/cls/utils/augmentations.py
new file mode 100644
index 000000000..bced47a5f
--- /dev/null
+++ b/yolov7_seg/cls/utils/augmentations.py
@@ -0,0 +1,347 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Image augmentation functions
+"""
+
+import math
+import random
+
+import cv2
+import numpy as np
+import torchvision.transforms as T
+import torchvision.transforms.functional as TF
+
+from utils.general import LOGGER, check_version, colorstr, resample_segments, segment2box
+from utils.metrics import bbox_ioa
+
+IMAGENET_MEAN = 0.485, 0.456, 0.406 # RGB mean
+IMAGENET_STD = 0.229, 0.224, 0.225 # RGB standard deviation
+
+
+class Albumentations:
+ # YOLOv5 Albumentations class (optional, only used if package is installed)
+ def __init__(self):
+ self.transform = None
+ prefix = colorstr('albumentations: ')
+ try:
+ import albumentations as A
+ check_version(A.__version__, '1.0.3', hard=True) # version requirement
+
+ T = [
+ A.Blur(p=0.01),
+ A.MedianBlur(p=0.01),
+ A.ToGray(p=0.01),
+ A.CLAHE(p=0.01),
+ A.RandomBrightnessContrast(p=0.0),
+ A.RandomGamma(p=0.0),
+ A.ImageCompression(quality_lower=75, p=0.0)] # transforms
+ self.transform = A.Compose(T, bbox_params=A.BboxParams(format='yolo', label_fields=['class_labels']))
+
+ LOGGER.info(prefix + ', '.join(f'{x}'.replace('always_apply=False, ', '') for x in T if x.p))
+ except ImportError: # package not installed, skip
+ pass
+ except Exception as e:
+ LOGGER.info(f'{prefix}{e}')
+
+ def __call__(self, im, labels, p=1.0):
+ if self.transform and random.random() < p:
+ new = self.transform(image=im, bboxes=labels[:, 1:], class_labels=labels[:, 0]) # transformed
+ im, labels = new['image'], np.array([[c, *b] for c, b in zip(new['class_labels'], new['bboxes'])])
+ return im, labels
+
+
+def normalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD):
+ # Denormalize RGB images x per ImageNet stats in BCHW format, i.e. = (x - mean) / std
+ return TF.normalize(x, mean, std, inplace=True)
+
+
+def denormalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD):
+ # Denormalize RGB images x per ImageNet stats in BCHW format, i.e. = x * std + mean
+ for i in range(3):
+ x[:, i] = x[:, i] * std[i] + mean[i]
+ return x
+
+
+def augment_hsv(im, hgain=0.5, sgain=0.5, vgain=0.5):
+ # HSV color-space augmentation
+ if hgain or sgain or vgain:
+ r = np.random.uniform(-1, 1, 3) * [hgain, sgain, vgain] + 1 # random gains
+ hue, sat, val = cv2.split(cv2.cvtColor(im, cv2.COLOR_BGR2HSV))
+ dtype = im.dtype # uint8
+
+ x = np.arange(0, 256, dtype=r.dtype)
+ lut_hue = ((x * r[0]) % 180).astype(dtype)
+ lut_sat = np.clip(x * r[1], 0, 255).astype(dtype)
+ lut_val = np.clip(x * r[2], 0, 255).astype(dtype)
+
+ im_hsv = cv2.merge((cv2.LUT(hue, lut_hue), cv2.LUT(sat, lut_sat), cv2.LUT(val, lut_val)))
+ cv2.cvtColor(im_hsv, cv2.COLOR_HSV2BGR, dst=im) # no return needed
+
+
+def hist_equalize(im, clahe=True, bgr=False):
+ # Equalize histogram on BGR image 'im' with im.shape(n,m,3) and range 0-255
+ yuv = cv2.cvtColor(im, cv2.COLOR_BGR2YUV if bgr else cv2.COLOR_RGB2YUV)
+ if clahe:
+ c = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
+ yuv[:, :, 0] = c.apply(yuv[:, :, 0])
+ else:
+ yuv[:, :, 0] = cv2.equalizeHist(yuv[:, :, 0]) # equalize Y channel histogram
+ return cv2.cvtColor(yuv, cv2.COLOR_YUV2BGR if bgr else cv2.COLOR_YUV2RGB) # convert YUV image to RGB
+
+
+def replicate(im, labels):
+ # Replicate labels
+ h, w = im.shape[:2]
+ boxes = labels[:, 1:].astype(int)
+ x1, y1, x2, y2 = boxes.T
+ s = ((x2 - x1) + (y2 - y1)) / 2 # side length (pixels)
+ for i in s.argsort()[:round(s.size * 0.5)]: # smallest indices
+ x1b, y1b, x2b, y2b = boxes[i]
+ bh, bw = y2b - y1b, x2b - x1b
+ yc, xc = int(random.uniform(0, h - bh)), int(random.uniform(0, w - bw)) # offset x, y
+ x1a, y1a, x2a, y2a = [xc, yc, xc + bw, yc + bh]
+ im[y1a:y2a, x1a:x2a] = im[y1b:y2b, x1b:x2b] # im4[ymin:ymax, xmin:xmax]
+ labels = np.append(labels, [[labels[i, 0], x1a, y1a, x2a, y2a]], axis=0)
+
+ return im, labels
+
+
+def letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
+ # Resize and pad image while meeting stride-multiple constraints
+ shape = im.shape[:2] # current shape [height, width]
+ if isinstance(new_shape, int):
+ new_shape = (new_shape, new_shape)
+
+ # Scale ratio (new / old)
+ r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
+ if not scaleup: # only scale down, do not scale up (for better val mAP)
+ r = min(r, 1.0)
+
+ # Compute padding
+ ratio = r, r # width, height ratios
+ new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
+ dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
+ if auto: # minimum rectangle
+ dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
+ elif scaleFill: # stretch
+ dw, dh = 0.0, 0.0
+ new_unpad = (new_shape[1], new_shape[0])
+ ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
+
+ dw /= 2 # divide padding into 2 sides
+ dh /= 2
+
+ if shape[::-1] != new_unpad: # resize
+ im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
+ top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
+ left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
+ im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
+ return im, ratio, (dw, dh)
+
+
+def random_perspective(im,
+ targets=(),
+ segments=(),
+ degrees=10,
+ translate=.1,
+ scale=.1,
+ shear=10,
+ perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(0.1, 0.1), scale=(0.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = im.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = im.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
+ T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(im[:, :, ::-1]) # base
+ # ax[1].imshow(im2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ if n:
+ use_segments = any(x.any() for x in segments)
+ new = np.zeros((n, 4))
+ if use_segments: # warp segments
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+
+ else: # warp boxes
+ xy = np.ones((n * 4, 3))
+ xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
+
+ # create new boxes
+ x = xy[:, [0, 2, 4, 6]]
+ y = xy[:, [1, 3, 5, 7]]
+ new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
+
+ # clip
+ new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
+ new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+
+ return im, targets
+
+
+def copy_paste(im, labels, segments, p=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ if p and n:
+ h, w, c = im.shape # height, width, channels
+ im_new = np.zeros(im.shape, np.uint8)
+ for j in random.sample(range(n), k=round(p * n)):
+ l, s = labels[j], segments[j]
+ box = w - l[3], l[2], w - l[1], l[4]
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
+ labels = np.concatenate((labels, [[l[0], *box]]), 0)
+ segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=im, src2=im_new)
+ result = cv2.flip(result, 1) # augment segments (flip left-right)
+ i = result > 0 # pixels to replace
+ # i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
+ im[i] = result[i] # cv2.imwrite('debug.jpg', im) # debug
+
+ return im, labels, segments
+
+
+def cutout(im, labels, p=0.5):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ if random.random() < p:
+ h, w = im.shape[:2]
+ scales = [0.5] * 1 + [0.25] * 2 + [0.125] * 4 + [0.0625] * 8 + [0.03125] * 16 # image size fraction
+ for s in scales:
+ mask_h = random.randint(1, int(h * s)) # create random masks
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ # apply random color mask
+ im[ymin:ymax, xmin:xmax] = [random.randint(64, 191) for _ in range(3)]
+
+ # return unobscured labels
+ if len(labels) and s > 0.03:
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ labels = labels[ioa < 0.60] # remove >60% obscured labels
+
+ return labels
+
+
+def mixup(im, labels, im2, labels2):
+ # Applies MixUp augmentation https://arxiv.org/pdf/1710.09412.pdf
+ r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
+ im = (im * r + im2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+ return im, labels
+
+
+def box_candidates(box1, box2, wh_thr=2, ar_thr=100, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
+ # Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
+ w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
+ w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
+ ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
+ return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
+
+
+def classify_albumentations(augment=True,
+ size=224,
+ scale=(0.08, 1.0),
+ hflip=0.5,
+ vflip=0.0,
+ jitter=0.4,
+ mean=IMAGENET_MEAN,
+ std=IMAGENET_STD,
+ auto_aug=False):
+ # YOLOv5 classification Albumentations (optional, only used if package is installed)
+ prefix = colorstr('albumentations: ')
+ try:
+ import albumentations as A
+ from albumentations.pytorch import ToTensorV2
+ check_version(A.__version__, '1.0.3', hard=True) # version requirement
+ if augment: # Resize and crop
+ T = [A.RandomResizedCrop(height=size, width=size, scale=scale)]
+ if auto_aug:
+ # TODO: implement AugMix, AutoAug & RandAug in albumentation
+ LOGGER.info(f'{prefix}auto augmentations are currently not supported')
+ else:
+ if hflip > 0:
+ T += [A.HorizontalFlip(p=hflip)]
+ if vflip > 0:
+ T += [A.VerticalFlip(p=vflip)]
+ if jitter > 0:
+ color_jitter = (float(jitter),) * 3 # repeat value for brightness, contrast, satuaration, 0 hue
+ T += [A.ColorJitter(*color_jitter, 0)]
+ else: # Use fixed crop for eval set (reproducibility)
+ T = [A.SmallestMaxSize(max_size=size), A.CenterCrop(height=size, width=size)]
+ T += [A.Normalize(mean=mean, std=std), ToTensorV2()] # Normalize and convert to Tensor
+ LOGGER.info(prefix + ', '.join(f'{x}'.replace('always_apply=False, ', '') for x in T if x.p))
+ return A.Compose(T)
+
+ except ImportError: # package not installed, skip
+ pass
+ except Exception as e:
+ LOGGER.info(f'{prefix}{e}')
+
+
+def classify_transforms(size=224):
+ # Transforms to apply if albumentations not installed
+ return T.Compose([T.ToTensor(), T.Resize(size), T.CenterCrop(size), T.Normalize(IMAGENET_MEAN, IMAGENET_STD)])
diff --git a/yolov7_seg/cls/utils/autoanchor.py b/yolov7_seg/cls/utils/autoanchor.py
new file mode 100644
index 000000000..c2e82b9e8
--- /dev/null
+++ b/yolov7_seg/cls/utils/autoanchor.py
@@ -0,0 +1,170 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+AutoAnchor utils
+"""
+
+import random
+
+import numpy as np
+import torch
+import yaml
+from tqdm import tqdm
+
+from utils.general import LOGGER, colorstr, emojis
+
+PREFIX = colorstr('AutoAnchor: ')
+
+
+def check_anchor_order(m):
+ # Check anchor order against stride order for YOLOv5 Detect() module m, and correct if necessary
+ a = m.anchors.prod(-1).mean(-1).view(-1) # mean anchor area per output layer
+ da = a[-1] - a[0] # delta a
+ ds = m.stride[-1] - m.stride[0] # delta s
+ if da and (da.sign() != ds.sign()): # same order
+ LOGGER.info(f'{PREFIX}Reversing anchor order')
+ m.anchors[:] = m.anchors.flip(0)
+
+
+def check_anchors(dataset, model, thr=4.0, imgsz=640):
+ # Check anchor fit to data, recompute if necessary
+ m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
+ shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
+ wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
+
+ def metric(k): # compute metric
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1 / r).min(2)[0] # ratio metric
+ best = x.max(1)[0] # best_x
+ aat = (x > 1 / thr).float().sum(1).mean() # anchors above threshold
+ bpr = (best > 1 / thr).float().mean() # best possible recall
+ return bpr, aat
+
+ stride = m.stride.to(m.anchors.device).view(-1, 1, 1) # model strides
+ anchors = m.anchors.clone() * stride # current anchors
+ bpr, aat = metric(anchors.cpu().view(-1, 2))
+ s = f'\n{PREFIX}{aat:.2f} anchors/target, {bpr:.3f} Best Possible Recall (BPR). '
+ if bpr > 0.98: # threshold to recompute
+ LOGGER.info(emojis(f'{s}Current anchors are a good fit to dataset ✅'))
+ else:
+ LOGGER.info(emojis(f'{s}Anchors are a poor fit to dataset ⚠️, attempting to improve...'))
+ na = m.anchors.numel() // 2 # number of anchors
+ try:
+ anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
+ except Exception as e:
+ LOGGER.info(f'{PREFIX}ERROR: {e}')
+ new_bpr = metric(anchors)[0]
+ if new_bpr > bpr: # replace anchors
+ anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
+ m.anchors[:] = anchors.clone().view_as(m.anchors)
+ check_anchor_order(m) # must be in pixel-space (not grid-space)
+ m.anchors /= stride
+ s = f'{PREFIX}Done ✅ (optional: update model *.yaml to use these anchors in the future)'
+ else:
+ s = f'{PREFIX}Done ⚠️ (original anchors better than new anchors, proceeding with original anchors)'
+ LOGGER.info(emojis(s))
+
+
+def kmean_anchors(dataset='./data/coco128.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
+ """ Creates kmeans-evolved anchors from training dataset
+
+ Arguments:
+ dataset: path to data.yaml, or a loaded dataset
+ n: number of anchors
+ img_size: image size used for training
+ thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
+ gen: generations to evolve anchors using genetic algorithm
+ verbose: print all results
+
+ Return:
+ k: kmeans evolved anchors
+
+ Usage:
+ from utils.autoanchor import *; _ = kmean_anchors()
+ """
+ from scipy.cluster.vq import kmeans
+
+ npr = np.random
+ thr = 1 / thr
+
+ def metric(k, wh): # compute metrics
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1 / r).min(2)[0] # ratio metric
+ # x = wh_iou(wh, torch.tensor(k)) # iou metric
+ return x, x.max(1)[0] # x, best_x
+
+ def anchor_fitness(k): # mutation fitness
+ _, best = metric(torch.tensor(k, dtype=torch.float32), wh)
+ return (best * (best > thr).float()).mean() # fitness
+
+ def print_results(k, verbose=True):
+ k = k[np.argsort(k.prod(1))] # sort small to large
+ x, best = metric(k, wh0)
+ bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
+ s = f'{PREFIX}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr\n' \
+ f'{PREFIX}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, ' \
+ f'past_thr={x[x > thr].mean():.3f}-mean: '
+ for x in k:
+ s += '%i,%i, ' % (round(x[0]), round(x[1]))
+ if verbose:
+ LOGGER.info(s[:-2])
+ return k
+
+ if isinstance(dataset, str): # *.yaml file
+ with open(dataset, errors='ignore') as f:
+ data_dict = yaml.safe_load(f) # model dict
+ from utils.dataloaders import LoadImagesAndLabels
+ dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
+
+ # Get label wh
+ shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
+
+ # Filter
+ i = (wh0 < 3.0).any(1).sum()
+ if i:
+ LOGGER.info(f'{PREFIX}WARNING: Extremely small objects found: {i} of {len(wh0)} labels are < 3 pixels in size')
+ wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ # wh = wh * (npr.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
+
+ # Kmeans init
+ try:
+ LOGGER.info(f'{PREFIX}Running kmeans for {n} anchors on {len(wh)} points...')
+ assert n <= len(wh) # apply overdetermined constraint
+ s = wh.std(0) # sigmas for whitening
+ k = kmeans(wh / s, n, iter=30)[0] * s # points
+ assert n == len(k) # kmeans may return fewer points than requested if wh is insufficient or too similar
+ except Exception:
+ LOGGER.warning(f'{PREFIX}WARNING: switching strategies from kmeans to random init')
+ k = np.sort(npr.rand(n * 2)).reshape(n, 2) * img_size # random init
+ wh, wh0 = (torch.tensor(x, dtype=torch.float32) for x in (wh, wh0))
+ k = print_results(k, verbose=False)
+
+ # Plot
+ # k, d = [None] * 20, [None] * 20
+ # for i in tqdm(range(1, 21)):
+ # k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
+ # ax = ax.ravel()
+ # ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
+ # ax[0].hist(wh[wh[:, 0]<100, 0],400)
+ # ax[1].hist(wh[wh[:, 1]<100, 1],400)
+ # fig.savefig('wh.png', dpi=200)
+
+ # Evolve
+ f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
+ pbar = tqdm(range(gen), bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ for _ in pbar:
+ v = np.ones(sh)
+ while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
+ v = ((npr.random(sh) < mp) * random.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
+ kg = (k.copy() * v).clip(min=2.0)
+ fg = anchor_fitness(kg)
+ if fg > f:
+ f, k = fg, kg.copy()
+ pbar.desc = f'{PREFIX}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
+ if verbose:
+ print_results(k, verbose)
+
+ return print_results(k)
diff --git a/yolov7_seg/cls/utils/autobatch.py b/yolov7_seg/cls/utils/autobatch.py
new file mode 100644
index 000000000..e45fd712a
--- /dev/null
+++ b/yolov7_seg/cls/utils/autobatch.py
@@ -0,0 +1,66 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Auto-batch utils
+"""
+
+from copy import deepcopy
+
+import numpy as np
+import torch
+
+from utils.general import LOGGER, colorstr, emojis
+from utils.torch_utils import profile
+
+
+def check_train_batch_size(model, imgsz=640, amp=True):
+ # Check YOLOv5 training batch size
+ with torch.cuda.amp.autocast(amp):
+ return autobatch(deepcopy(model).train(), imgsz) # compute optimal batch size
+
+
+def autobatch(model, imgsz=640, fraction=0.9, batch_size=16):
+ # Automatically estimate best batch size to use `fraction` of available CUDA memory
+ # Usage:
+ # import torch
+ # from utils.autobatch import autobatch
+ # model = torch.hub.load('ultralytics/yolov5', 'yolov5s', autoshape=False)
+ # print(autobatch(model))
+
+ # Check device
+ prefix = colorstr('AutoBatch: ')
+ LOGGER.info(f'{prefix}Computing optimal batch size for --imgsz {imgsz}')
+ device = next(model.parameters()).device # get model device
+ if device.type == 'cpu':
+ LOGGER.info(f'{prefix}CUDA not detected, using default CPU batch-size {batch_size}')
+ return batch_size
+
+ # Inspect CUDA memory
+ gb = 1 << 30 # bytes to GiB (1024 ** 3)
+ d = str(device).upper() # 'CUDA:0'
+ properties = torch.cuda.get_device_properties(device) # device properties
+ t = properties.total_memory / gb # GiB total
+ r = torch.cuda.memory_reserved(device) / gb # GiB reserved
+ a = torch.cuda.memory_allocated(device) / gb # GiB allocated
+ f = t - (r + a) # GiB free
+ LOGGER.info(f'{prefix}{d} ({properties.name}) {t:.2f}G total, {r:.2f}G reserved, {a:.2f}G allocated, {f:.2f}G free')
+
+ # Profile batch sizes
+ batch_sizes = [1, 2, 4, 8, 16]
+ try:
+ img = [torch.zeros(b, 3, imgsz, imgsz) for b in batch_sizes]
+ results = profile(img, model, n=3, device=device)
+ except Exception as e:
+ LOGGER.warning(f'{prefix}{e}')
+
+ # Fit a solution
+ y = [x[2] for x in results if x] # memory [2]
+ p = np.polyfit(batch_sizes[:len(y)], y, deg=1) # first degree polynomial fit
+ b = int((f * fraction - p[1]) / p[0]) # y intercept (optimal batch size)
+ if None in results: # some sizes failed
+ i = results.index(None) # first fail index
+ if b >= batch_sizes[i]: # y intercept above failure point
+ b = batch_sizes[max(i - 1, 0)] # select prior safe point
+
+ fraction = np.polyval(p, b) / t # actual fraction predicted
+ LOGGER.info(emojis(f'{prefix}Using batch-size {b} for {d} {t * fraction:.2f}G/{t:.2f}G ({fraction * 100:.0f}%) ✅'))
+ return b
diff --git a/yolov7_seg/cls/utils/aws/__init__.py b/yolov7_seg/cls/utils/aws/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/yolov7_seg/cls/utils/aws/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/yolov7_seg/cls/utils/aws/mime.sh b/yolov7_seg/cls/utils/aws/mime.sh
new file mode 100644
index 000000000..4a4de18ec
--- /dev/null
+++ b/yolov7_seg/cls/utils/aws/mime.sh
@@ -0,0 +1,26 @@
+# AWS EC2 instance startup 'MIME' script https://aws.amazon.com/premiumsupport/knowledge-center/execute-user-data-ec2/
+# This script will run on every instance restart, not only on first start
+# --- DO NOT COPY ABOVE COMMENTS WHEN PASTING INTO USERDATA ---
+
+Content-Type: multipart/mixed; boundary="//"
+MIME-Version: 1.0
+
+--//
+Content-Type: text/cloud-config; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="cloud-config.txt"
+
+#cloud-config
+cloud_final_modules:
+- [scripts-user, always]
+
+--//
+Content-Type: text/x-shellscript; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="userdata.txt"
+
+#!/bin/bash
+# --- paste contents of userdata.sh here ---
+--//
diff --git a/yolov7_seg/cls/utils/aws/resume.py b/yolov7_seg/cls/utils/aws/resume.py
new file mode 100644
index 000000000..2e7b2d814
--- /dev/null
+++ b/yolov7_seg/cls/utils/aws/resume.py
@@ -0,0 +1,40 @@
+# Resume all interrupted trainings in yolov5/ dir including DDP trainings
+# Usage: $ python utils/aws/resume.py
+
+import os
+import sys
+from pathlib import Path
+
+import torch
+import yaml
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[2] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+port = 0 # --master_port
+path = Path('').resolve()
+for last in path.rglob('*/**/last.pt'):
+ ckpt = torch.load(last)
+ if ckpt['optimizer'] is None:
+ continue
+
+ # Load opt.yaml
+ with open(last.parent.parent / 'opt.yaml', errors='ignore') as f:
+ opt = yaml.safe_load(f)
+
+ # Get device count
+ d = opt['device'].split(',') # devices
+ nd = len(d) # number of devices
+ ddp = nd > 1 or (nd == 0 and torch.cuda.device_count() > 1) # distributed data parallel
+
+ if ddp: # multi-GPU
+ port += 1
+ cmd = f'python -m torch.distributed.run --nproc_per_node {nd} --master_port {port} train.py --resume {last}'
+ else: # single-GPU
+ cmd = f'python train.py --resume {last}'
+
+ cmd += ' > /dev/null 2>&1 &' # redirect output to dev/null and run in daemon thread
+ print(cmd)
+ os.system(cmd)
diff --git a/yolov7_seg/cls/utils/aws/userdata.sh b/yolov7_seg/cls/utils/aws/userdata.sh
new file mode 100644
index 000000000..53527ab84
--- /dev/null
+++ b/yolov7_seg/cls/utils/aws/userdata.sh
@@ -0,0 +1,27 @@
+#!/bin/bash
+# AWS EC2 instance startup script https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/user-data.html
+# This script will run only once on first instance start (for a re-start script see mime.sh)
+# /home/ubuntu (ubuntu) or /home/ec2-user (amazon-linux) is working dir
+# Use >300 GB SSD
+
+cd home/ubuntu
+if [ ! -d yolov5 ]; then
+ echo "Running first-time script." # install dependencies, download COCO, pull Docker
+ git clone https://github.com/ultralytics/yolov5 -b master && sudo chmod -R 777 yolov5
+ cd yolov5
+ bash data/scripts/get_coco.sh && echo "COCO done." &
+ sudo docker pull ultralytics/yolov5:latest && echo "Docker done." &
+ python -m pip install --upgrade pip && pip install -r requirements.txt && python detect.py && echo "Requirements done." &
+ wait && echo "All tasks done." # finish background tasks
+else
+ echo "Running re-start script." # resume interrupted runs
+ i=0
+ list=$(sudo docker ps -qa) # container list i.e. $'one\ntwo\nthree\nfour'
+ while IFS= read -r id; do
+ ((i++))
+ echo "restarting container $i: $id"
+ sudo docker start $id
+ # sudo docker exec -it $id python train.py --resume # single-GPU
+ sudo docker exec -d $id python utils/aws/resume.py # multi-scenario
+ done <<<"$list"
+fi
diff --git a/yolov7_seg/cls/utils/benchmarks.py b/yolov7_seg/cls/utils/benchmarks.py
new file mode 100644
index 000000000..bbb316783
--- /dev/null
+++ b/yolov7_seg/cls/utils/benchmarks.py
@@ -0,0 +1,157 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run YOLOv5 benchmarks on all supported export formats
+
+Format | `export.py --include` | Model
+--- | --- | ---
+PyTorch | - | yolov5s.pt
+TorchScript | `torchscript` | yolov5s.torchscript
+ONNX | `onnx` | yolov5s.onnx
+OpenVINO | `openvino` | yolov5s_openvino_model/
+TensorRT | `engine` | yolov5s.engine
+CoreML | `coreml` | yolov5s.mlmodel
+TensorFlow SavedModel | `saved_model` | yolov5s_saved_model/
+TensorFlow GraphDef | `pb` | yolov5s.pb
+TensorFlow Lite | `tflite` | yolov5s.tflite
+TensorFlow Edge TPU | `edgetpu` | yolov5s_edgetpu.tflite
+TensorFlow.js | `tfjs` | yolov5s_web_model/
+
+Requirements:
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu # CPU
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime-gpu openvino-dev tensorflow # GPU
+ $ pip install -U nvidia-tensorrt --index-url https://pypi.ngc.nvidia.com # TensorRT
+
+Usage:
+ $ python utils/benchmarks.py --weights yolov5s.pt --img 640
+"""
+
+import argparse
+import platform
+import sys
+import time
+from pathlib import Path
+
+import pandas as pd
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+# ROOT = ROOT.relative_to(Path.cwd()) # relative
+
+import export
+import val
+from utils import notebook_init
+from utils.general import LOGGER, check_yaml, file_size, print_args
+from utils.torch_utils import select_device
+
+
+def run(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=640, # inference size (pixels)
+ batch_size=1, # batch size
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ half=False, # use FP16 half-precision inference
+ test=False, # test exports only
+ pt_only=False, # test PyTorch only
+ hard_fail=False, # throw error on benchmark failure
+):
+ y, t = [], time.time()
+ device = select_device(device)
+ for i, (name, f, suffix, cpu, gpu) in export.export_formats().iterrows(): # index, (name, file, suffix, CPU, GPU)
+ try:
+ assert i not in (9, 10), 'inference not supported' # Edge TPU and TF.js are unsupported
+ assert i != 5 or platform.system() == 'Darwin', 'inference only supported on macOS>=10.13' # CoreML
+ if 'cpu' in device.type:
+ assert cpu, 'inference not supported on CPU'
+ if 'cuda' in device.type:
+ assert gpu, 'inference not supported on GPU'
+
+ # Export
+ if f == '-':
+ w = weights # PyTorch format
+ else:
+ w = export.run(weights=weights, imgsz=[imgsz], include=[f], device=device, half=half)[-1] # all others
+ assert suffix in str(w), 'export failed'
+
+ # Validate
+ result = val.run(data, w, batch_size, imgsz, plots=False, device=device, task='benchmark', half=half)
+ metrics = result[0] # metrics (mp, mr, map50, map, *losses(box, obj, cls))
+ speeds = result[2] # times (preprocess, inference, postprocess)
+ y.append([name, round(file_size(w), 1), round(metrics[3], 4), round(speeds[1], 2)]) # MB, mAP, t_inference
+ except Exception as e:
+ if hard_fail:
+ assert type(e) is AssertionError, f'Benchmark --hard-fail for {name}: {e}'
+ LOGGER.warning(f'WARNING: Benchmark failure for {name}: {e}')
+ y.append([name, None, None, None]) # mAP, t_inference
+ if pt_only and i == 0:
+ break # break after PyTorch
+
+ # Print results
+ LOGGER.info('\n')
+ parse_opt()
+ notebook_init() # print system info
+ c = ['Format', 'Size (MB)', 'mAP@0.5:0.95', 'Inference time (ms)'] if map else ['Format', 'Export', '', '']
+ py = pd.DataFrame(y, columns=c)
+ LOGGER.info(f'\nBenchmarks complete ({time.time() - t:.2f}s)')
+ LOGGER.info(str(py if map else py.iloc[:, :2]))
+ return py
+
+
+def test(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=640, # inference size (pixels)
+ batch_size=1, # batch size
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ half=False, # use FP16 half-precision inference
+ test=False, # test exports only
+ pt_only=False, # test PyTorch only
+ hard_fail=False, # throw error on benchmark failure
+):
+ y, t = [], time.time()
+ device = select_device(device)
+ for i, (name, f, suffix, gpu) in export.export_formats().iterrows(): # index, (name, file, suffix, gpu-capable)
+ try:
+ w = weights if f == '-' else \
+ export.run(weights=weights, imgsz=[imgsz], include=[f], device=device, half=half)[-1] # weights
+ assert suffix in str(w), 'export failed'
+ y.append([name, True])
+ except Exception:
+ y.append([name, False]) # mAP, t_inference
+
+ # Print results
+ LOGGER.info('\n')
+ parse_opt()
+ notebook_init() # print system info
+ py = pd.DataFrame(y, columns=['Format', 'Export'])
+ LOGGER.info(f'\nExports complete ({time.time() - t:.2f}s)')
+ LOGGER.info(str(py))
+ return py
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='weights path')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--test', action='store_true', help='test exports only')
+ parser.add_argument('--pt-only', action='store_true', help='test PyTorch only')
+ parser.add_argument('--hard-fail', action='store_true', help='throw error on benchmark failure')
+ opt = parser.parse_args()
+ opt.data = check_yaml(opt.data) # check YAML
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ test(**vars(opt)) if opt.test else run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/cls/utils/callbacks.py b/yolov7_seg/cls/utils/callbacks.py
new file mode 100644
index 000000000..da36a557a
--- /dev/null
+++ b/yolov7_seg/cls/utils/callbacks.py
@@ -0,0 +1,71 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Callback utils
+"""
+
+
+class Callbacks:
+ """"
+ Handles all registered callbacks for YOLOv5 Hooks
+ """
+
+ def __init__(self):
+ # Define the available callbacks
+ self._callbacks = {
+ 'on_pretrain_routine_start': [],
+ 'on_pretrain_routine_end': [],
+ 'on_train_start': [],
+ 'on_train_epoch_start': [],
+ 'on_train_batch_start': [],
+ 'optimizer_step': [],
+ 'on_before_zero_grad': [],
+ 'on_train_batch_end': [],
+ 'on_train_epoch_end': [],
+ 'on_val_start': [],
+ 'on_val_batch_start': [],
+ 'on_val_image_end': [],
+ 'on_val_batch_end': [],
+ 'on_val_end': [],
+ 'on_fit_epoch_end': [], # fit = train + val
+ 'on_model_save': [],
+ 'on_train_end': [],
+ 'on_params_update': [],
+ 'teardown': [],}
+ self.stop_training = False # set True to interrupt training
+
+ def register_action(self, hook, name='', callback=None):
+ """
+ Register a new action to a callback hook
+
+ Args:
+ hook: The callback hook name to register the action to
+ name: The name of the action for later reference
+ callback: The callback to fire
+ """
+ assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
+ assert callable(callback), f"callback '{callback}' is not callable"
+ self._callbacks[hook].append({'name': name, 'callback': callback})
+
+ def get_registered_actions(self, hook=None):
+ """"
+ Returns all the registered actions by callback hook
+
+ Args:
+ hook: The name of the hook to check, defaults to all
+ """
+ return self._callbacks[hook] if hook else self._callbacks
+
+ def run(self, hook, *args, **kwargs):
+ """
+ Loop through the registered actions and fire all callbacks
+
+ Args:
+ hook: The name of the hook to check, defaults to all
+ args: Arguments to receive from YOLOv5
+ kwargs: Keyword Arguments to receive from YOLOv5
+ """
+
+ assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
+
+ for logger in self._callbacks[hook]:
+ logger['callback'](*args, **kwargs)
diff --git a/yolov7_seg/cls/utils/dataloaders.py b/yolov7_seg/cls/utils/dataloaders.py
new file mode 100644
index 000000000..866f490fa
--- /dev/null
+++ b/yolov7_seg/cls/utils/dataloaders.py
@@ -0,0 +1,1157 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Dataloaders and dataset utils
+"""
+
+import contextlib
+import glob
+import hashlib
+import json
+import math
+import os
+import random
+import shutil
+import time
+from itertools import repeat
+from multiprocessing.pool import Pool, ThreadPool
+from pathlib import Path
+from threading import Thread
+from urllib.parse import urlparse
+from zipfile import ZipFile
+
+import numpy as np
+import torch
+import torch.nn.functional as F
+import torchvision
+import yaml
+from PIL import ExifTags, Image, ImageOps
+from torch.utils.data import DataLoader, Dataset, dataloader, distributed
+from tqdm import tqdm
+
+from utils.augmentations import (Albumentations, augment_hsv, classify_albumentations, classify_transforms, copy_paste,
+ letterbox, mixup, random_perspective)
+from utils.general import (DATASETS_DIR, LOGGER, NUM_THREADS, check_dataset, check_requirements, check_yaml, clean_str,
+ cv2, is_colab, is_kaggle, segments2boxes, xyn2xy, xywh2xyxy, xywhn2xyxy, xyxy2xywhn)
+from utils.torch_utils import torch_distributed_zero_first
+
+# Parameters
+HELP_URL = 'https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
+IMG_FORMATS = 'bmp', 'dng', 'jpeg', 'jpg', 'mpo', 'png', 'tif', 'tiff', 'webp' # include image suffixes
+VID_FORMATS = 'asf', 'avi', 'gif', 'm4v', 'mkv', 'mov', 'mp4', 'mpeg', 'mpg', 'ts', 'wmv' # include video suffixes
+BAR_FORMAT = '{l_bar}{bar:10}{r_bar}{bar:-10b}' # tqdm bar format
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+
+# Get orientation exif tag
+for orientation in ExifTags.TAGS.keys():
+ if ExifTags.TAGS[orientation] == 'Orientation':
+ break
+
+
+def get_hash(paths):
+ # Returns a single hash value of a list of paths (files or dirs)
+ size = sum(os.path.getsize(p) for p in paths if os.path.exists(p)) # sizes
+ h = hashlib.md5(str(size).encode()) # hash sizes
+ h.update(''.join(paths).encode()) # hash paths
+ return h.hexdigest() # return hash
+
+
+def exif_size(img):
+ # Returns exif-corrected PIL size
+ s = img.size # (width, height)
+ with contextlib.suppress(Exception):
+ rotation = dict(img._getexif().items())[orientation]
+ if rotation in [6, 8]: # rotation 270 or 90
+ s = (s[1], s[0])
+ return s
+
+
+def exif_transpose(image):
+ """
+ Transpose a PIL image accordingly if it has an EXIF Orientation tag.
+ Inplace version of https://github.com/python-pillow/Pillow/blob/master/src/PIL/ImageOps.py exif_transpose()
+
+ :param image: The image to transpose.
+ :return: An image.
+ """
+ exif = image.getexif()
+ orientation = exif.get(0x0112, 1) # default 1
+ if orientation > 1:
+ method = {
+ 2: Image.FLIP_LEFT_RIGHT,
+ 3: Image.ROTATE_180,
+ 4: Image.FLIP_TOP_BOTTOM,
+ 5: Image.TRANSPOSE,
+ 6: Image.ROTATE_270,
+ 7: Image.TRANSVERSE,
+ 8: Image.ROTATE_90,}.get(orientation)
+ if method is not None:
+ image = image.transpose(method)
+ del exif[0x0112]
+ image.info["exif"] = exif.tobytes()
+ return image
+
+
+def seed_worker(worker_id):
+ # Set dataloader worker seed https://pytorch.org/docs/stable/notes/randomness.html#dataloader
+ worker_seed = torch.initial_seed() % 2 ** 32
+ np.random.seed(worker_seed)
+ random.seed(worker_seed)
+
+
+def create_dataloader(path,
+ imgsz,
+ batch_size,
+ stride,
+ single_cls=False,
+ hyp=None,
+ augment=False,
+ cache=False,
+ pad=0.0,
+ rect=False,
+ rank=-1,
+ workers=8,
+ image_weights=False,
+ quad=False,
+ prefix='',
+ shuffle=False):
+ if rect and shuffle:
+ LOGGER.warning('WARNING: --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ shuffle = False
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = LoadImagesAndLabels(
+ path,
+ imgsz,
+ batch_size,
+ augment=augment, # augmentation
+ hyp=hyp, # hyperparameters
+ rect=rect, # rectangular batches
+ cache_images=cache,
+ single_cls=single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix)
+
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count() # number of CUDA devices
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
+ generator = torch.Generator()
+ generator.manual_seed(0)
+ return loader(dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn,
+ worker_init_fn=seed_worker,
+ generator=generator), dataset
+
+
+class InfiniteDataLoader(dataloader.DataLoader):
+ """ Dataloader that reuses workers
+
+ Uses same syntax as vanilla DataLoader
+ """
+
+ def __init__(self, *args, **kwargs):
+ super().__init__(*args, **kwargs)
+ object.__setattr__(self, 'batch_sampler', _RepeatSampler(self.batch_sampler))
+ self.iterator = super().__iter__()
+
+ def __len__(self):
+ return len(self.batch_sampler.sampler)
+
+ def __iter__(self):
+ for _ in range(len(self)):
+ yield next(self.iterator)
+
+
+class _RepeatSampler:
+ """ Sampler that repeats forever
+
+ Args:
+ sampler (Sampler)
+ """
+
+ def __init__(self, sampler):
+ self.sampler = sampler
+
+ def __iter__(self):
+ while True:
+ yield from iter(self.sampler)
+
+
+class LoadImages:
+ # YOLOv5 image/video dataloader, i.e. `python detect.py --source image.jpg/vid.mp4`
+ def __init__(self, path, img_size=640, stride=32, auto=True):
+ files = []
+ for p in sorted(path) if isinstance(path, (list, tuple)) else [path]:
+ p = str(Path(p).resolve())
+ if '*' in p:
+ files.extend(sorted(glob.glob(p, recursive=True))) # glob
+ elif os.path.isdir(p):
+ files.extend(sorted(glob.glob(os.path.join(p, '*.*')))) # dir
+ elif os.path.isfile(p):
+ files.append(p) # files
+ else:
+ raise FileNotFoundError(f'{p} does not exist')
+
+ images = [x for x in files if x.split('.')[-1].lower() in IMG_FORMATS]
+ videos = [x for x in files if x.split('.')[-1].lower() in VID_FORMATS]
+ ni, nv = len(images), len(videos)
+
+ self.img_size = img_size
+ self.stride = stride
+ self.files = images + videos
+ self.nf = ni + nv # number of files
+ self.video_flag = [False] * ni + [True] * nv
+ self.mode = 'image'
+ self.auto = auto
+ if any(videos):
+ self.new_video(videos[0]) # new video
+ else:
+ self.cap = None
+ assert self.nf > 0, f'No images or videos found in {p}. ' \
+ f'Supported formats are:\nimages: {IMG_FORMATS}\nvideos: {VID_FORMATS}'
+
+ def __iter__(self):
+ self.count = 0
+ return self
+
+ def __next__(self):
+ if self.count == self.nf:
+ raise StopIteration
+ path = self.files[self.count]
+
+ if self.video_flag[self.count]:
+ # Read video
+ self.mode = 'video'
+ ret_val, img0 = self.cap.read()
+ while not ret_val:
+ self.count += 1
+ self.cap.release()
+ if self.count == self.nf: # last video
+ raise StopIteration
+ path = self.files[self.count]
+ self.new_video(path)
+ ret_val, img0 = self.cap.read()
+
+ self.frame += 1
+ s = f'video {self.count + 1}/{self.nf} ({self.frame}/{self.frames}) {path}: '
+
+ else:
+ # Read image
+ self.count += 1
+ img0 = cv2.imread(path) # BGR
+ assert img0 is not None, f'Image Not Found {path}'
+ s = f'image {self.count}/{self.nf} {path}: '
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride, auto=self.auto)[0]
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return path, img, img0, self.cap, s
+
+ def new_video(self, path):
+ self.frame = 0
+ self.cap = cv2.VideoCapture(path)
+ self.frames = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
+
+ def __len__(self):
+ return self.nf # number of files
+
+
+class LoadWebcam: # for inference
+ # YOLOv5 local webcam dataloader, i.e. `python detect.py --source 0`
+ def __init__(self, pipe='0', img_size=640, stride=32):
+ self.img_size = img_size
+ self.stride = stride
+ self.pipe = eval(pipe) if pipe.isnumeric() else pipe
+ self.cap = cv2.VideoCapture(self.pipe) # video capture object
+ self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ self.cap.release()
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Read frame
+ ret_val, img0 = self.cap.read()
+ img0 = cv2.flip(img0, 1) # flip left-right
+
+ # Print
+ assert ret_val, f'Camera Error {self.pipe}'
+ img_path = 'webcam.jpg'
+ s = f'webcam {self.count}: '
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return img_path, img, img0, None, s
+
+ def __len__(self):
+ return 0
+
+
+class LoadStreams:
+ # YOLOv5 streamloader, i.e. `python detect.py --source 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP streams`
+ def __init__(self, sources='streams.txt', img_size=640, stride=32, auto=True):
+ self.mode = 'stream'
+ self.img_size = img_size
+ self.stride = stride
+
+ if os.path.isfile(sources):
+ with open(sources) as f:
+ sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
+ else:
+ sources = [sources]
+
+ n = len(sources)
+ self.imgs, self.fps, self.frames, self.threads = [None] * n, [0] * n, [0] * n, [None] * n
+ self.sources = [clean_str(x) for x in sources] # clean source names for later
+ self.auto = auto
+ for i, s in enumerate(sources): # index, source
+ # Start thread to read frames from video stream
+ st = f'{i + 1}/{n}: {s}... '
+ if urlparse(s).hostname in ('www.youtube.com', 'youtube.com', 'youtu.be'): # if source is YouTube video
+ check_requirements(('pafy', 'youtube_dl==2020.12.2'))
+ import pafy
+ s = pafy.new(s).getbest(preftype="mp4").url # YouTube URL
+ s = eval(s) if s.isnumeric() else s # i.e. s = '0' local webcam
+ if s == 0:
+ assert not is_colab(), '--source 0 webcam unsupported on Colab. Rerun command in a local environment.'
+ assert not is_kaggle(), '--source 0 webcam unsupported on Kaggle. Rerun command in a local environment.'
+ cap = cv2.VideoCapture(s)
+ assert cap.isOpened(), f'{st}Failed to open {s}'
+ w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ fps = cap.get(cv2.CAP_PROP_FPS) # warning: may return 0 or nan
+ self.frames[i] = max(int(cap.get(cv2.CAP_PROP_FRAME_COUNT)), 0) or float('inf') # infinite stream fallback
+ self.fps[i] = max((fps if math.isfinite(fps) else 0) % 100, 0) or 30 # 30 FPS fallback
+
+ _, self.imgs[i] = cap.read() # guarantee first frame
+ self.threads[i] = Thread(target=self.update, args=([i, cap, s]), daemon=True)
+ LOGGER.info(f"{st} Success ({self.frames[i]} frames {w}x{h} at {self.fps[i]:.2f} FPS)")
+ self.threads[i].start()
+ LOGGER.info('') # newline
+
+ # check for common shapes
+ s = np.stack([letterbox(x, self.img_size, stride=self.stride, auto=self.auto)[0].shape for x in self.imgs])
+ self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
+ if not self.rect:
+ LOGGER.warning('WARNING: Stream shapes differ. For optimal performance supply similarly-shaped streams.')
+
+ def update(self, i, cap, stream):
+ # Read stream `i` frames in daemon thread
+ n, f, read = 0, self.frames[i], 1 # frame number, frame array, inference every 'read' frame
+ while cap.isOpened() and n < f:
+ n += 1
+ # _, self.imgs[index] = cap.read()
+ cap.grab()
+ if n % read == 0:
+ success, im = cap.retrieve()
+ if success:
+ self.imgs[i] = im
+ else:
+ LOGGER.warning('WARNING: Video stream unresponsive, please check your IP camera connection.')
+ self.imgs[i] = np.zeros_like(self.imgs[i])
+ cap.open(stream) # re-open stream if signal was lost
+ time.sleep(0.0) # wait time
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if not all(x.is_alive() for x in self.threads) or cv2.waitKey(1) == ord('q'): # q to quit
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Letterbox
+ img0 = self.imgs.copy()
+ img = [letterbox(x, self.img_size, stride=self.stride, auto=self.rect and self.auto)[0] for x in img0]
+
+ # Stack
+ img = np.stack(img, 0)
+
+ # Convert
+ img = img[..., ::-1].transpose((0, 3, 1, 2)) # BGR to RGB, BHWC to BCHW
+ img = np.ascontiguousarray(img)
+
+ return self.sources, img, img0, None, ''
+
+ def __len__(self):
+ return len(self.sources) # 1E12 frames = 32 streams at 30 FPS for 30 years
+
+
+def img2label_paths(img_paths):
+ # Define label paths as a function of image paths
+ sa, sb = f'{os.sep}images{os.sep}', f'{os.sep}labels{os.sep}' # /images/, /labels/ substrings
+ return [sb.join(x.rsplit(sa, 1)).rsplit('.', 1)[0] + '.txt' for x in img_paths]
+
+
+class LoadImagesAndLabels(Dataset):
+ # YOLOv5 train_loader/val_loader, loads images and labels for training and validation
+ cache_version = 0.6 # dataset labels *.cache version
+ rand_interp_methods = [cv2.INTER_NEAREST, cv2.INTER_LINEAR, cv2.INTER_CUBIC, cv2.INTER_AREA, cv2.INTER_LANCZOS4]
+
+ def __init__(self,
+ path,
+ img_size=640,
+ batch_size=16,
+ augment=False,
+ hyp=None,
+ rect=False,
+ image_weights=False,
+ cache_images=False,
+ single_cls=False,
+ stride=32,
+ pad=0.0,
+ prefix=''):
+ self.img_size = img_size
+ self.augment = augment
+ self.hyp = hyp
+ self.image_weights = image_weights
+ self.rect = False if image_weights else rect
+ self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
+ self.mosaic_border = [-img_size // 2, -img_size // 2]
+ self.stride = stride
+ self.path = path
+ self.albumentations = Albumentations() if augment else None
+
+ try:
+ f = [] # image files
+ for p in path if isinstance(path, list) else [path]:
+ p = Path(p) # os-agnostic
+ if p.is_dir(): # dir
+ f += glob.glob(str(p / '**' / '*.*'), recursive=True)
+ # f = list(p.rglob('*.*')) # pathlib
+ elif p.is_file(): # file
+ with open(p) as t:
+ t = t.read().strip().splitlines()
+ parent = str(p.parent) + os.sep
+ f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
+ # f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
+ else:
+ raise FileNotFoundError(f'{prefix}{p} does not exist')
+ self.im_files = sorted(x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in IMG_FORMATS)
+ # self.img_files = sorted([x for x in f if x.suffix[1:].lower() in IMG_FORMATS]) # pathlib
+ assert self.im_files, f'{prefix}No images found'
+ except Exception as e:
+ raise Exception(f'{prefix}Error loading data from {path}: {e}\nSee {HELP_URL}')
+
+ # Check cache
+ self.label_files = img2label_paths(self.im_files) # labels
+ cache_path = (p if p.is_file() else Path(self.label_files[0]).parent).with_suffix('.cache')
+ try:
+ cache, exists = np.load(cache_path, allow_pickle=True).item(), True # load dict
+ assert cache['version'] == self.cache_version # matches current version
+ assert cache['hash'] == get_hash(self.label_files + self.im_files) # identical hash
+ except Exception:
+ cache, exists = self.cache_labels(cache_path, prefix), False # run cache ops
+
+ # Display cache
+ nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupt, total
+ if exists and LOCAL_RANK in {-1, 0}:
+ d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupt"
+ tqdm(None, desc=prefix + d, total=n, initial=n, bar_format=BAR_FORMAT) # display cache results
+ if cache['msgs']:
+ LOGGER.info('\n'.join(cache['msgs'])) # display warnings
+ assert nf > 0 or not augment, f'{prefix}No labels in {cache_path}. Can not train without labels. See {HELP_URL}'
+
+ # Read cache
+ [cache.pop(k) for k in ('hash', 'version', 'msgs')] # remove items
+ labels, shapes, self.segments = zip(*cache.values())
+ self.labels = list(labels)
+ self.shapes = np.array(shapes)
+ self.im_files = list(cache.keys()) # update
+ self.label_files = img2label_paths(cache.keys()) # update
+ n = len(shapes) # number of images
+ bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
+ nb = bi[-1] + 1 # number of batches
+ self.batch = bi # batch index of image
+ self.n = n
+ self.indices = range(n)
+
+ # Update labels
+ include_class = [] # filter labels to include only these classes (optional)
+ include_class_array = np.array(include_class).reshape(1, -1)
+ for i, (label, segment) in enumerate(zip(self.labels, self.segments)):
+ if include_class:
+ j = (label[:, 0:1] == include_class_array).any(1)
+ self.labels[i] = label[j]
+ if segment:
+ self.segments[i] = segment[j]
+ if single_cls: # single-class training, merge all classes into 0
+ self.labels[i][:, 0] = 0
+ if segment:
+ self.segments[i][:, 0] = 0
+
+ # Rectangular Training
+ if self.rect:
+ # Sort by aspect ratio
+ s = self.shapes # wh
+ ar = s[:, 1] / s[:, 0] # aspect ratio
+ irect = ar.argsort()
+ self.im_files = [self.im_files[i] for i in irect]
+ self.label_files = [self.label_files[i] for i in irect]
+ self.labels = [self.labels[i] for i in irect]
+ self.shapes = s[irect] # wh
+ ar = ar[irect]
+
+ # Set training image shapes
+ shapes = [[1, 1]] * nb
+ for i in range(nb):
+ ari = ar[bi == i]
+ mini, maxi = ari.min(), ari.max()
+ if maxi < 1:
+ shapes[i] = [maxi, 1]
+ elif mini > 1:
+ shapes[i] = [1, 1 / mini]
+
+ self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(np.int) * stride
+
+ # Cache images into RAM/disk for faster training (WARNING: large datasets may exceed system resources)
+ self.ims = [None] * n
+ self.npy_files = [Path(f).with_suffix('.npy') for f in self.im_files]
+ if cache_images:
+ gb = 0 # Gigabytes of cached images
+ self.im_hw0, self.im_hw = [None] * n, [None] * n
+ fcn = self.cache_images_to_disk if cache_images == 'disk' else self.load_image
+ results = ThreadPool(NUM_THREADS).imap(fcn, range(n))
+ pbar = tqdm(enumerate(results), total=n, bar_format=BAR_FORMAT, disable=LOCAL_RANK > 0)
+ for i, x in pbar:
+ if cache_images == 'disk':
+ gb += self.npy_files[i].stat().st_size
+ else: # 'ram'
+ self.ims[i], self.im_hw0[i], self.im_hw[i] = x # im, hw_orig, hw_resized = load_image(self, i)
+ gb += self.ims[i].nbytes
+ pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB {cache_images})'
+ pbar.close()
+
+ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
+ # Cache dataset labels, check images and read shapes
+ x = {} # dict
+ nm, nf, ne, nc, msgs = 0, 0, 0, 0, [] # number missing, found, empty, corrupt, messages
+ desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels..."
+ with Pool(NUM_THREADS) as pool:
+ pbar = tqdm(pool.imap(verify_image_label, zip(self.im_files, self.label_files, repeat(prefix))),
+ desc=desc,
+ total=len(self.im_files),
+ bar_format=BAR_FORMAT)
+ for im_file, lb, shape, segments, nm_f, nf_f, ne_f, nc_f, msg in pbar:
+ nm += nm_f
+ nf += nf_f
+ ne += ne_f
+ nc += nc_f
+ if im_file:
+ x[im_file] = [lb, shape, segments]
+ if msg:
+ msgs.append(msg)
+ pbar.desc = f"{desc}{nf} found, {nm} missing, {ne} empty, {nc} corrupt"
+
+ pbar.close()
+ if msgs:
+ LOGGER.info('\n'.join(msgs))
+ if nf == 0:
+ LOGGER.warning(f'{prefix}WARNING: No labels found in {path}. See {HELP_URL}')
+ x['hash'] = get_hash(self.label_files + self.im_files)
+ x['results'] = nf, nm, ne, nc, len(self.im_files)
+ x['msgs'] = msgs # warnings
+ x['version'] = self.cache_version # cache version
+ try:
+ np.save(path, x) # save cache for next time
+ path.with_suffix('.cache.npy').rename(path) # remove .npy suffix
+ LOGGER.info(f'{prefix}New cache created: {path}')
+ except Exception as e:
+ LOGGER.warning(f'{prefix}WARNING: Cache directory {path.parent} is not writeable: {e}') # not writeable
+ return x
+
+ def __len__(self):
+ return len(self.im_files)
+
+ # def __iter__(self):
+ # self.count = -1
+ # print('ran dataset iter')
+ # #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
+ # return self
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ if mosaic:
+ # Load mosaic
+ img, labels = self.load_mosaic(index)
+ shapes = None
+
+ # MixUp augmentation
+ if random.random() < hyp['mixup']:
+ img, labels = mixup(img, labels, *self.load_mosaic(random.randint(0, self.n - 1)))
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = self.load_image(index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ img, labels = random_perspective(img,
+ labels,
+ degrees=hyp['degrees'],
+ translate=hyp['translate'],
+ scale=hyp['scale'],
+ shear=hyp['shear'],
+ perspective=hyp['perspective'])
+
+ nl = len(labels) # number of labels
+ if nl:
+ labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1E-3)
+
+ if self.augment:
+ # Albumentations
+ img, labels = self.albumentations(img, labels)
+ nl = len(labels) # update after albumentations
+
+ # HSV color-space
+ augment_hsv(img, hgain=hyp['hsv_h'], sgain=hyp['hsv_s'], vgain=hyp['hsv_v'])
+
+ # Flip up-down
+ if random.random() < hyp['flipud']:
+ img = np.flipud(img)
+ if nl:
+ labels[:, 2] = 1 - labels[:, 2]
+
+ # Flip left-right
+ if random.random() < hyp['fliplr']:
+ img = np.fliplr(img)
+ if nl:
+ labels[:, 1] = 1 - labels[:, 1]
+
+ # Cutouts
+ # labels = cutout(img, labels, p=0.5)
+ # nl = len(labels) # update after cutout
+
+ labels_out = torch.zeros((nl, 6))
+ if nl:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return torch.from_numpy(img), labels_out, self.im_files[index], shapes
+
+ def load_image(self, i):
+ # Loads 1 image from dataset index 'i', returns (im, original hw, resized hw)
+ im, f, fn = self.ims[i], self.im_files[i], self.npy_files[i],
+ if im is None: # not cached in RAM
+ if fn.exists(): # load npy
+ im = np.load(fn)
+ else: # read image
+ im = cv2.imread(f) # BGR
+ assert im is not None, f'Image Not Found {f}'
+ h0, w0 = im.shape[:2] # orig hw
+ r = self.img_size / max(h0, w0) # ratio
+ if r != 1: # if sizes are not equal
+ interp = cv2.INTER_LINEAR if (self.augment or r > 1) else cv2.INTER_AREA
+ im = cv2.resize(im, (int(w0 * r), int(h0 * r)), interpolation=interp)
+ return im, (h0, w0), im.shape[:2] # im, hw_original, hw_resized
+ return self.ims[i], self.im_hw0[i], self.im_hw[i] # im, hw_original, hw_resized
+
+ def cache_images_to_disk(self, i):
+ # Saves an image as an *.npy file for faster loading
+ f = self.npy_files[i]
+ if not f.exists():
+ np.save(f.as_posix(), cv2.imread(self.im_files[i]))
+
+ def load_mosaic(self, index):
+ # YOLOv5 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ random.shuffle(indices)
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp['copy_paste'])
+ img4, labels4 = random_perspective(img4,
+ labels4,
+ segments4,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img4, labels4
+
+ def load_mosaic9(self, index):
+ # YOLOv5 9-mosaic loader. Loads 1 image + 8 random images into a 9-image mosaic
+ labels9, segments9 = [], []
+ s = self.img_size
+ indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
+ random.shuffle(indices)
+ hp, wp = -1, -1 # height, width previous
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img9
+ if i == 0: # center
+ img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ h0, w0 = h, w
+ c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
+ elif i == 1: # top
+ c = s, s - h, s + w, s
+ elif i == 2: # top right
+ c = s + wp, s - h, s + wp + w, s
+ elif i == 3: # right
+ c = s + w0, s, s + w0 + w, s + h
+ elif i == 4: # bottom right
+ c = s + w0, s + hp, s + w0 + w, s + hp + h
+ elif i == 5: # bottom
+ c = s + w0 - w, s + h0, s + w0, s + h0 + h
+ elif i == 6: # bottom left
+ c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
+ elif i == 7: # left
+ c = s - w, s + h0 - h, s, s + h0
+ elif i == 8: # top left
+ c = s - w, s + h0 - hp - h, s, s + h0 - hp
+
+ padx, pady = c[:2]
+ x1, y1, x2, y2 = (max(x, 0) for x in c) # allocate coords
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
+ labels9.append(labels)
+ segments9.extend(segments)
+
+ # Image
+ img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
+ hp, wp = h, w # height, width previous
+
+ # Offset
+ yc, xc = (int(random.uniform(0, s)) for _ in self.mosaic_border) # mosaic center x, y
+ img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
+
+ # Concat/clip labels
+ labels9 = np.concatenate(labels9, 0)
+ labels9[:, [1, 3]] -= xc
+ labels9[:, [2, 4]] -= yc
+ c = np.array([xc, yc]) # centers
+ segments9 = [x - c for x in segments9]
+
+ for x in (labels9[:, 1:], *segments9):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img9, labels9 = replicate(img9, labels9) # replicate
+
+ # Augment
+ img9, labels9 = random_perspective(img9,
+ labels9,
+ segments9,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img9, labels9
+
+ @staticmethod
+ def collate_fn(batch):
+ im, label, path, shapes = zip(*batch) # transposed
+ for i, lb in enumerate(label):
+ lb[:, 0] = i # add target image index for build_targets()
+ return torch.stack(im, 0), torch.cat(label, 0), path, shapes
+
+ @staticmethod
+ def collate_fn4(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ n = len(shapes) // 4
+ im4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
+
+ ho = torch.tensor([[0.0, 0, 0, 1, 0, 0]])
+ wo = torch.tensor([[0.0, 0, 1, 0, 0, 0]])
+ s = torch.tensor([[1, 1, 0.5, 0.5, 0.5, 0.5]]) # scale
+ for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
+ i *= 4
+ if random.random() < 0.5:
+ im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2.0, mode='bilinear',
+ align_corners=False)[0].type(img[i].type())
+ lb = label[i]
+ else:
+ im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
+ lb = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
+ im4.append(im)
+ label4.append(lb)
+
+ for i, lb in enumerate(label4):
+ lb[:, 0] = i # add target image index for build_targets()
+
+ return torch.stack(im4, 0), torch.cat(label4, 0), path4, shapes4
+
+
+# Ancillary functions --------------------------------------------------------------------------------------------------
+def flatten_recursive(path=DATASETS_DIR / 'coco128'):
+ # Flatten a recursive directory by bringing all files to top level
+ new_path = Path(f'{str(path)}_flat')
+ if os.path.exists(new_path):
+ shutil.rmtree(new_path) # delete output folder
+ os.makedirs(new_path) # make new output folder
+ for file in tqdm(glob.glob(f'{str(Path(path))}/**/*.*', recursive=True)):
+ shutil.copyfile(file, new_path / Path(file).name)
+
+
+def extract_boxes(path=DATASETS_DIR / 'coco128'): # from utils.dataloaders import *; extract_boxes()
+ # Convert detection dataset into classification dataset, with one directory per class
+ path = Path(path) # images dir
+ shutil.rmtree(path / 'classifier') if (path / 'classifier').is_dir() else None # remove existing
+ files = list(path.rglob('*.*'))
+ n = len(files) # number of files
+ for im_file in tqdm(files, total=n):
+ if im_file.suffix[1:] in IMG_FORMATS:
+ # image
+ im = cv2.imread(str(im_file))[..., ::-1] # BGR to RGB
+ h, w = im.shape[:2]
+
+ # labels
+ lb_file = Path(img2label_paths([str(im_file)])[0])
+ if Path(lb_file).exists():
+ with open(lb_file) as f:
+ lb = np.array([x.split() for x in f.read().strip().splitlines()], dtype=np.float32) # labels
+
+ for j, x in enumerate(lb):
+ c = int(x[0]) # class
+ f = (path / 'classifier') / f'{c}' / f'{path.stem}_{im_file.stem}_{j}.jpg' # new filename
+ if not f.parent.is_dir():
+ f.parent.mkdir(parents=True)
+
+ b = x[1:] * [w, h, w, h] # box
+ # b[2:] = b[2:].max() # rectangle to square
+ b[2:] = b[2:] * 1.2 + 3 # pad
+ b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
+
+ b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
+ b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
+ assert cv2.imwrite(str(f), im[b[1]:b[3], b[0]:b[2]]), f'box failure in {f}'
+
+
+def autosplit(path=DATASETS_DIR / 'coco128/images', weights=(0.9, 0.1, 0.0), annotated_only=False):
+ """ Autosplit a dataset into train/val/test splits and save path/autosplit_*.txt files
+ Usage: from utils.dataloaders import *; autosplit()
+ Arguments
+ path: Path to images directory
+ weights: Train, val, test weights (list, tuple)
+ annotated_only: Only use images with an annotated txt file
+ """
+ path = Path(path) # images dir
+ files = sorted(x for x in path.rglob('*.*') if x.suffix[1:].lower() in IMG_FORMATS) # image files only
+ n = len(files) # number of files
+ random.seed(0) # for reproducibility
+ indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
+
+ txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
+ [(path.parent / x).unlink(missing_ok=True) for x in txt] # remove existing
+
+ print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
+ for i, img in tqdm(zip(indices, files), total=n):
+ if not annotated_only or Path(img2label_paths([str(img)])[0]).exists(): # check label
+ with open(path.parent / txt[i], 'a') as f:
+ f.write(f'./{img.relative_to(path.parent).as_posix()}' + '\n') # add image to txt file
+
+
+def verify_image_label(args):
+ # Verify one image-label pair
+ im_file, lb_file, prefix = args
+ nm, nf, ne, nc, msg, segments = 0, 0, 0, 0, '', [] # number (missing, found, empty, corrupt), message, segments
+ try:
+ # verify images
+ im = Image.open(im_file)
+ im.verify() # PIL verify
+ shape = exif_size(im) # image size
+ assert (shape[0] > 9) & (shape[1] > 9), f'image size {shape} <10 pixels'
+ assert im.format.lower() in IMG_FORMATS, f'invalid image format {im.format}'
+ if im.format.lower() in ('jpg', 'jpeg'):
+ with open(im_file, 'rb') as f:
+ f.seek(-2, 2)
+ if f.read() != b'\xff\xd9': # corrupt JPEG
+ ImageOps.exif_transpose(Image.open(im_file)).save(im_file, 'JPEG', subsampling=0, quality=100)
+ msg = f'{prefix}WARNING: {im_file}: corrupt JPEG restored and saved'
+
+ # verify labels
+ if os.path.isfile(lb_file):
+ nf = 1 # label found
+ with open(lb_file) as f:
+ lb = [x.split() for x in f.read().strip().splitlines() if len(x)]
+ if any(len(x) > 6 for x in lb): # is segment
+ classes = np.array([x[0] for x in lb], dtype=np.float32)
+ segments = [np.array(x[1:], dtype=np.float32).reshape(-1, 2) for x in lb] # (cls, xy1...)
+ lb = np.concatenate((classes.reshape(-1, 1), segments2boxes(segments)), 1) # (cls, xywh)
+ lb = np.array(lb, dtype=np.float32)
+ nl = len(lb)
+ if nl:
+ assert lb.shape[1] == 5, f'labels require 5 columns, {lb.shape[1]} columns detected'
+ assert (lb >= 0).all(), f'negative label values {lb[lb < 0]}'
+ assert (lb[:, 1:] <= 1).all(), f'non-normalized or out of bounds coordinates {lb[:, 1:][lb[:, 1:] > 1]}'
+ _, i = np.unique(lb, axis=0, return_index=True)
+ if len(i) < nl: # duplicate row check
+ lb = lb[i] # remove duplicates
+ if segments:
+ #segments = segments[i]
+ segments = [segments[x] for x in i]
+ msg = f'{prefix}WARNING: {im_file}: {nl - len(i)} duplicate labels removed'
+ else:
+ ne = 1 # label empty
+ lb = np.zeros((0, 5), dtype=np.float32)
+ else:
+ nm = 1 # label missing
+ lb = np.zeros((0, 5), dtype=np.float32)
+ return im_file, lb, shape, segments, nm, nf, ne, nc, msg
+ except Exception as e:
+ nc = 1
+ msg = f'{prefix}WARNING: {im_file}: ignoring corrupt image/label: {e}'
+ return [None, None, None, None, nm, nf, ne, nc, msg]
+
+
+class HUBDatasetStats():
+ """ Return dataset statistics dictionary with images and instances counts per split per class
+ To run in parent directory: export PYTHONPATH="$PWD/yolov5"
+ Usage1: from utils.dataloaders import *; HUBDatasetStats('coco128.yaml', autodownload=True)
+ Usage2: from utils.dataloaders import *; HUBDatasetStats('path/to/coco128_with_yaml.zip')
+ Arguments
+ path: Path to data.yaml or data.zip (with data.yaml inside data.zip)
+ autodownload: Attempt to download dataset if not found locally
+ """
+
+ def __init__(self, path='coco128.yaml', autodownload=False):
+ # Initialize class
+ zipped, data_dir, yaml_path = self._unzip(Path(path))
+ try:
+ with open(check_yaml(yaml_path), errors='ignore') as f:
+ data = yaml.safe_load(f) # data dict
+ if zipped:
+ data['path'] = data_dir
+ except Exception as e:
+ raise Exception("error/HUB/dataset_stats/yaml_load") from e
+
+ check_dataset(data, autodownload) # download dataset if missing
+ self.hub_dir = Path(data['path'] + '-hub')
+ self.im_dir = self.hub_dir / 'images'
+ self.im_dir.mkdir(parents=True, exist_ok=True) # makes /images
+ self.stats = {'nc': data['nc'], 'names': data['names']} # statistics dictionary
+ self.data = data
+
+ @staticmethod
+ def _find_yaml(dir):
+ # Return data.yaml file
+ files = list(dir.glob('*.yaml')) or list(dir.rglob('*.yaml')) # try root level first and then recursive
+ assert files, f'No *.yaml file found in {dir}'
+ if len(files) > 1:
+ files = [f for f in files if f.stem == dir.stem] # prefer *.yaml files that match dir name
+ assert files, f'Multiple *.yaml files found in {dir}, only 1 *.yaml file allowed'
+ assert len(files) == 1, f'Multiple *.yaml files found: {files}, only 1 *.yaml file allowed in {dir}'
+ return files[0]
+
+ def _unzip(self, path):
+ # Unzip data.zip
+ if not str(path).endswith('.zip'): # path is data.yaml
+ return False, None, path
+ assert Path(path).is_file(), f'Error unzipping {path}, file not found'
+ ZipFile(path).extractall(path=path.parent) # unzip
+ dir = path.with_suffix('') # dataset directory == zip name
+ assert dir.is_dir(), f'Error unzipping {path}, {dir} not found. path/to/abc.zip MUST unzip to path/to/abc/'
+ return True, str(dir), self._find_yaml(dir) # zipped, data_dir, yaml_path
+
+ def _hub_ops(self, f, max_dim=1920):
+ # HUB ops for 1 image 'f': resize and save at reduced quality in /dataset-hub for web/app viewing
+ f_new = self.im_dir / Path(f).name # dataset-hub image filename
+ try: # use PIL
+ im = Image.open(f)
+ r = max_dim / max(im.height, im.width) # ratio
+ if r < 1.0: # image too large
+ im = im.resize((int(im.width * r), int(im.height * r)))
+ im.save(f_new, 'JPEG', quality=50, optimize=True) # save
+ except Exception as e: # use OpenCV
+ print(f'WARNING: HUB ops PIL failure {f}: {e}')
+ im = cv2.imread(f)
+ im_height, im_width = im.shape[:2]
+ r = max_dim / max(im_height, im_width) # ratio
+ if r < 1.0: # image too large
+ im = cv2.resize(im, (int(im_width * r), int(im_height * r)), interpolation=cv2.INTER_AREA)
+ cv2.imwrite(str(f_new), im)
+
+ def get_json(self, save=False, verbose=False):
+ # Return dataset JSON for Ultralytics HUB
+ def _round(labels):
+ # Update labels to integer class and 6 decimal place floats
+ return [[int(c), *(round(x, 4) for x in points)] for c, *points in labels]
+
+ for split in 'train', 'val', 'test':
+ if self.data.get(split) is None:
+ self.stats[split] = None # i.e. no test set
+ continue
+ dataset = LoadImagesAndLabels(self.data[split]) # load dataset
+ x = np.array([
+ np.bincount(label[:, 0].astype(int), minlength=self.data['nc'])
+ for label in tqdm(dataset.labels, total=dataset.n, desc='Statistics')]) # shape(128x80)
+ self.stats[split] = {
+ 'instance_stats': {
+ 'total': int(x.sum()),
+ 'per_class': x.sum(0).tolist()},
+ 'image_stats': {
+ 'total': dataset.n,
+ 'unlabelled': int(np.all(x == 0, 1).sum()),
+ 'per_class': (x > 0).sum(0).tolist()},
+ 'labels': [{
+ str(Path(k).name): _round(v.tolist())} for k, v in zip(dataset.im_files, dataset.labels)]}
+
+ # Save, print and return
+ if save:
+ stats_path = self.hub_dir / 'stats.json'
+ print(f'Saving {stats_path.resolve()}...')
+ with open(stats_path, 'w') as f:
+ json.dump(self.stats, f) # save stats.json
+ if verbose:
+ print(json.dumps(self.stats, indent=2, sort_keys=False))
+ return self.stats
+
+ def process_images(self):
+ # Compress images for Ultralytics HUB
+ for split in 'train', 'val', 'test':
+ if self.data.get(split) is None:
+ continue
+ dataset = LoadImagesAndLabels(self.data[split]) # load dataset
+ desc = f'{split} images'
+ for _ in tqdm(ThreadPool(NUM_THREADS).imap(self._hub_ops, dataset.im_files), total=dataset.n, desc=desc):
+ pass
+ print(f'Done. All images saved to {self.im_dir}')
+ return self.im_dir
+
+
+# Classification dataloaders -------------------------------------------------------------------------------------------
+class ClassificationDataset(torchvision.datasets.ImageFolder):
+ """
+ YOLOv5 Classification Dataset.
+ Arguments
+ root: Dataset path
+ transform: torchvision transforms, used by default
+ album_transform: Albumentations transforms, used if installed
+ """
+
+ def __init__(self, root, augment, imgsz, cache=False):
+ super().__init__(root=root)
+ self.torch_transforms = classify_transforms(imgsz)
+ self.album_transforms = classify_albumentations(augment, imgsz) if augment else None
+ self.cache_ram = cache is True or cache == 'ram'
+ self.cache_disk = cache == 'disk'
+ self.samples = [list(x) + [Path(x[0]).with_suffix('.npy'), None] for x in self.samples] # file, index, npy, im
+
+ def __getitem__(self, i):
+ f, j, fn, im = self.samples[i] # filename, index, filename.with_suffix('.npy'), image
+ if self.album_transforms:
+ if self.cache_ram and im is None:
+ im = self.samples[i][3] = cv2.imread(f)
+ elif self.cache_disk:
+ if not fn.exists(): # load npy
+ np.save(fn.as_posix(), cv2.imread(f))
+ im = np.load(fn)
+ else: # read image
+ im = cv2.imread(f) # BGR
+ sample = self.album_transforms(image=cv2.cvtColor(im, cv2.COLOR_BGR2RGB))["image"]
+ else:
+ sample = self.torch_transforms(self.loader(f))
+ return sample, j
+
+
+def create_classification_dataloader(path,
+ imgsz=224,
+ batch_size=16,
+ augment=True,
+ cache=False,
+ rank=-1,
+ workers=8,
+ shuffle=True):
+ # Returns Dataloader object to be used with YOLOv5 Classifier
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = ClassificationDataset(root=path, imgsz=imgsz, augment=augment, cache=cache)
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count()
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers])
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ generator = torch.Generator()
+ generator.manual_seed(0)
+ return InfiniteDataLoader(dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ worker_init_fn=seed_worker,
+ generator=generator) # or DataLoader(persistent_workers=True)
diff --git a/yolov7_seg/cls/utils/docker/Dockerfile b/yolov7_seg/cls/utils/docker/Dockerfile
new file mode 100644
index 000000000..d421c20c3
--- /dev/null
+++ b/yolov7_seg/cls/utils/docker/Dockerfile
@@ -0,0 +1,68 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is CUDA-optimized for YOLOv5 single/multi-GPU training and inference
+
+# Start FROM NVIDIA PyTorch image https://ngc.nvidia.com/catalog/containers/nvidia:pytorch
+FROM nvcr.io/nvidia/pytorch:22.07-py3
+RUN rm -rf /opt/pytorch # remove 1.2GB dir
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update && apt install --no-install-recommends -y zip htop screen libgl1-mesa-glx
+
+# Install pip packages
+COPY requirements.txt .
+RUN python -m pip install --upgrade pip wheel
+RUN pip uninstall -y Pillow torchtext # torch torchvision
+RUN pip install --no-cache -r requirements.txt albumentations wandb gsutil notebook Pillow>=9.1.0 \
+ 'opencv-python<4.6.0.66' \
+ --extra-index-url https://download.pytorch.org/whl/cu113
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+# Set environment variables
+ENV OMP_NUM_THREADS=8
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest && sudo docker build -f utils/docker/Dockerfile -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all $t
+
+# Pull and Run with local directory access
+# t=ultralytics/yolov5:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all -v "$(pwd)"/datasets:/usr/src/datasets $t
+
+# Kill all
+# sudo docker kill $(sudo docker ps -q)
+
+# Kill all image-based
+# sudo docker kill $(sudo docker ps -qa --filter ancestor=ultralytics/yolov5:latest)
+
+# Bash into running container
+# sudo docker exec -it 5a9b5863d93d bash
+
+# Bash into stopped container
+# id=$(sudo docker ps -qa) && sudo docker start $id && sudo docker exec -it $id bash
+
+# Clean up
+# docker system prune -a --volumes
+
+# Update Ubuntu drivers
+# https://www.maketecheasier.com/install-nvidia-drivers-ubuntu/
+
+# DDP test
+# python -m torch.distributed.run --nproc_per_node 2 --master_port 1 train.py --epochs 3
+
+# GCP VM from Image
+# docker.io/ultralytics/yolov5:latest
diff --git a/yolov7_seg/cls/utils/docker/Dockerfile-arm64 b/yolov7_seg/cls/utils/docker/Dockerfile-arm64
new file mode 100644
index 000000000..ebcf7ae0b
--- /dev/null
+++ b/yolov7_seg/cls/utils/docker/Dockerfile-arm64
@@ -0,0 +1,42 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest-arm64 image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is aarch64-compatible for Apple M1 and other ARM architectures i.e. Jetson Nano and Raspberry Pi
+
+# Start FROM Ubuntu image https://hub.docker.com/_/ubuntu
+FROM arm64v8/ubuntu:20.04
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update
+RUN DEBIAN_FRONTEND=noninteractive TZ=Etc/UTC apt install -y tzdata
+RUN apt install --no-install-recommends -y python3-pip git zip curl htop gcc \
+ libgl1-mesa-glx libglib2.0-0 libpython3.8-dev
+# RUN alias python=python3
+
+# Install pip packages
+COPY requirements.txt .
+RUN python3 -m pip install --upgrade pip wheel
+RUN pip install --no-cache -r requirements.txt gsutil notebook \
+ tensorflow-aarch64
+ # tensorflowjs \
+ # onnx onnx-simplifier onnxruntime \
+ # coremltools openvino-dev \
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest-M1 && sudo docker build --platform linux/arm64 -f utils/docker/Dockerfile-arm64 -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest-M1 && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
diff --git a/yolov7_seg/cls/utils/docker/Dockerfile-cpu b/yolov7_seg/cls/utils/docker/Dockerfile-cpu
new file mode 100644
index 000000000..e7d4e43eb
--- /dev/null
+++ b/yolov7_seg/cls/utils/docker/Dockerfile-cpu
@@ -0,0 +1,39 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest-cpu image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is CPU-optimized for ONNX, OpenVINO and PyTorch YOLOv5 deployments
+
+# Start FROM Ubuntu image https://hub.docker.com/_/ubuntu
+FROM ubuntu:20.04
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update
+RUN DEBIAN_FRONTEND=noninteractive TZ=Etc/UTC apt install -y tzdata
+RUN apt install --no-install-recommends -y python3-pip git zip curl htop libgl1-mesa-glx libglib2.0-0 libpython3.8-dev
+# RUN alias python=python3
+
+# Install pip packages
+COPY requirements.txt .
+RUN python3 -m pip install --upgrade pip wheel
+RUN pip install --no-cache -r requirements.txt albumentations gsutil notebook \
+ coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu tensorflowjs \
+ --extra-index-url https://download.pytorch.org/whl/cpu
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest-cpu && sudo docker build -f utils/docker/Dockerfile-cpu -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest-cpu && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
diff --git a/yolov7_seg/cls/utils/downloads.py b/yolov7_seg/cls/utils/downloads.py
new file mode 100644
index 000000000..c4c8f8bc2
--- /dev/null
+++ b/yolov7_seg/cls/utils/downloads.py
@@ -0,0 +1,180 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Download utils
+"""
+
+import logging
+import os
+import platform
+import subprocess
+import time
+import urllib
+from pathlib import Path
+from zipfile import ZipFile
+
+import requests
+import torch
+
+
+def is_url(url, check_online=True):
+ # Check if online file exists
+ try:
+ url = str(url)
+ result = urllib.parse.urlparse(url)
+ assert all([result.scheme, result.netloc, result.path]) # check if is url
+ return (urllib.request.urlopen(url).getcode() == 200) if check_online else True # check if exists online
+ except (AssertionError, urllib.request.HTTPError):
+ return False
+
+
+def gsutil_getsize(url=''):
+ # gs://bucket/file size https://cloud.google.com/storage/docs/gsutil/commands/du
+ s = subprocess.check_output(f'gsutil du {url}', shell=True).decode('utf-8')
+ return eval(s.split(' ')[0]) if len(s) else 0 # bytes
+
+
+def safe_download(file, url, url2=None, min_bytes=1E0, error_msg=''):
+ # Attempts to download file from url or url2, checks and removes incomplete downloads < min_bytes
+ from utils.general import LOGGER
+
+ file = Path(file)
+ assert_msg = f"Downloaded file '{file}' does not exist or size is < min_bytes={min_bytes}"
+ try: # url1
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, str(file), progress=LOGGER.level <= logging.INFO)
+ assert file.exists() and file.stat().st_size > min_bytes, assert_msg # check
+ except Exception as e: # url2
+ file.unlink(missing_ok=True) # remove partial downloads
+ LOGGER.info(f'ERROR: {e}\nRe-attempting {url2 or url} to {file}...')
+ os.system(f"curl -L '{url2 or url}' -o '{file}' --retry 3 -C -") # curl download, retry and resume on fail
+ finally:
+ if not file.exists() or file.stat().st_size < min_bytes: # check
+ file.unlink(missing_ok=True) # remove partial downloads
+ LOGGER.info(f"ERROR: {assert_msg}\n{error_msg}")
+ LOGGER.info('')
+
+
+def attempt_download(file, repo='ultralytics/yolov5', release='v6.1'):
+ # Attempt file download from GitHub release assets if not found locally. release = 'latest', 'v6.1', etc.
+ from utils.general import LOGGER
+
+ def github_assets(repository, version='latest'):
+ # Return GitHub repo tag (i.e. 'v6.1') and assets (i.e. ['yolov5s.pt', 'yolov5m.pt', ...])
+ if version != 'latest':
+ version = f'tags/{version}' # i.e. tags/v6.1
+ response = requests.get(f'https://api.github.com/repos/{repository}/releases/{version}').json() # github api
+ return response['tag_name'], [x['name'] for x in response['assets']] # tag, assets
+
+ file = Path(str(file).strip().replace("'", ''))
+ if not file.exists():
+ # URL specified
+ name = Path(urllib.parse.unquote(str(file))).name # decode '%2F' to '/' etc.
+ if str(file).startswith(('http:/', 'https:/')): # download
+ url = str(file).replace(':/', '://') # Pathlib turns :// -> :/
+ file = name.split('?')[0] # parse authentication https://url.com/file.txt?auth...
+ if Path(file).is_file():
+ LOGGER.info(f'Found {url} locally at {file}') # file already exists
+ else:
+ safe_download(file=file, url=url, min_bytes=1E5)
+ return file
+
+ # GitHub assets
+ assets = [
+ 'yolov5n.pt', 'yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt', 'yolov5n6.pt', 'yolov5s6.pt',
+ 'yolov5m6.pt', 'yolov5l6.pt', 'yolov5x6.pt']
+ try:
+ tag, assets = github_assets(repo, release)
+ except Exception:
+ try:
+ tag, assets = github_assets(repo) # latest release
+ except Exception:
+ try:
+ tag = subprocess.check_output('git tag', shell=True, stderr=subprocess.STDOUT).decode().split()[-1]
+ except Exception:
+ tag = release
+
+ file.parent.mkdir(parents=True, exist_ok=True) # make parent dir (if required)
+ if name in assets:
+ url3 = 'https://drive.google.com/drive/folders/1EFQTEUeXWSFww0luse2jB9M1QNZQGwNl' # backup gdrive mirror
+ safe_download(
+ file,
+ url=f'https://github.com/{repo}/releases/download/{tag}/{name}',
+ url2=f'https://storage.googleapis.com/{repo}/{tag}/{name}', # backup url (optional)
+ min_bytes=1E5,
+ error_msg=f'{file} missing, try downloading from https://github.com/{repo}/releases/{tag} or {url3}')
+
+ return str(file)
+
+
+def gdrive_download(id='16TiPfZj7htmTyhntwcZyEEAejOUxuT6m', file='tmp.zip'):
+ # Downloads a file from Google Drive. from yolov5.utils.downloads import *; gdrive_download()
+ t = time.time()
+ file = Path(file)
+ cookie = Path('cookie') # gdrive cookie
+ print(f'Downloading https://drive.google.com/uc?export=download&id={id} as {file}... ', end='')
+ file.unlink(missing_ok=True) # remove existing file
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Attempt file download
+ out = "NUL" if platform.system() == "Windows" else "/dev/null"
+ os.system(f'curl -c ./cookie -s -L "drive.google.com/uc?export=download&id={id}" > {out}')
+ if os.path.exists('cookie'): # large file
+ s = f'curl -Lb ./cookie "drive.google.com/uc?export=download&confirm={get_token()}&id={id}" -o {file}'
+ else: # small file
+ s = f'curl -s -L -o {file} "drive.google.com/uc?export=download&id={id}"'
+ r = os.system(s) # execute, capture return
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Error check
+ if r != 0:
+ file.unlink(missing_ok=True) # remove partial
+ print('Download error ') # raise Exception('Download error')
+ return r
+
+ # Unzip if archive
+ if file.suffix == '.zip':
+ print('unzipping... ', end='')
+ ZipFile(file).extractall(path=file.parent) # unzip
+ file.unlink() # remove zip
+
+ print(f'Done ({time.time() - t:.1f}s)')
+ return r
+
+
+def get_token(cookie="./cookie"):
+ with open(cookie) as f:
+ for line in f:
+ if "download" in line:
+ return line.split()[-1]
+ return ""
+
+
+# Google utils: https://cloud.google.com/storage/docs/reference/libraries ----------------------------------------------
+#
+#
+# def upload_blob(bucket_name, source_file_name, destination_blob_name):
+# # Uploads a file to a bucket
+# # https://cloud.google.com/storage/docs/uploading-objects#storage-upload-object-python
+#
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(destination_blob_name)
+#
+# blob.upload_from_filename(source_file_name)
+#
+# print('File {} uploaded to {}.'.format(
+# source_file_name,
+# destination_blob_name))
+#
+#
+# def download_blob(bucket_name, source_blob_name, destination_file_name):
+# # Uploads a blob from a bucket
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(source_blob_name)
+#
+# blob.download_to_filename(destination_file_name)
+#
+# print('Blob {} downloaded to {}.'.format(
+# source_blob_name,
+# destination_file_name))
diff --git a/yolov7_seg/cls/utils/flask_rest_api/README.md b/yolov7_seg/cls/utils/flask_rest_api/README.md
new file mode 100644
index 000000000..9de4da470
--- /dev/null
+++ b/yolov7_seg/cls/utils/flask_rest_api/README.md
@@ -0,0 +1,73 @@
+# Flask REST API
+
+[REST](https://en.wikipedia.org/wiki/Representational_state_transfer) [API](https://en.wikipedia.org/wiki/API)s are
+commonly used to expose Machine Learning (ML) models to other services. This folder contains an example REST API
+created using Flask to expose the YOLOv5s model from [PyTorch Hub](https://pytorch.org/hub/ultralytics_yolov5/).
+
+## Requirements
+
+[Flask](https://palletsprojects.com/p/flask/) is required. Install with:
+
+```shell
+$ pip install Flask
+```
+
+## Run
+
+After Flask installation run:
+
+```shell
+$ python3 restapi.py --port 5000
+```
+
+Then use [curl](https://curl.se/) to perform a request:
+
+```shell
+$ curl -X POST -F image=@zidane.jpg 'http://localhost:5000/v1/object-detection/yolov5s'
+```
+
+The model inference results are returned as a JSON response:
+
+```json
+[
+ {
+ "class": 0,
+ "confidence": 0.8900438547,
+ "height": 0.9318675399,
+ "name": "person",
+ "width": 0.3264600933,
+ "xcenter": 0.7438579798,
+ "ycenter": 0.5207948685
+ },
+ {
+ "class": 0,
+ "confidence": 0.8440024257,
+ "height": 0.7155083418,
+ "name": "person",
+ "width": 0.6546785235,
+ "xcenter": 0.427829951,
+ "ycenter": 0.6334488392
+ },
+ {
+ "class": 27,
+ "confidence": 0.3771208823,
+ "height": 0.3902671337,
+ "name": "tie",
+ "width": 0.0696444362,
+ "xcenter": 0.3675483763,
+ "ycenter": 0.7991207838
+ },
+ {
+ "class": 27,
+ "confidence": 0.3527112305,
+ "height": 0.1540903747,
+ "name": "tie",
+ "width": 0.0336618312,
+ "xcenter": 0.7814827561,
+ "ycenter": 0.5065554976
+ }
+]
+```
+
+An example python script to perform inference using [requests](https://docs.python-requests.org/en/master/) is given
+in `example_request.py`
diff --git a/yolov7_seg/cls/utils/flask_rest_api/example_request.py b/yolov7_seg/cls/utils/flask_rest_api/example_request.py
new file mode 100644
index 000000000..9c898143e
--- /dev/null
+++ b/yolov7_seg/cls/utils/flask_rest_api/example_request.py
@@ -0,0 +1,19 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Perform test request
+"""
+
+import pprint
+
+import requests
+
+DETECTION_URL = "http://localhost:5000/v1/object-detection/yolov5s"
+IMAGE = "zidane.jpg"
+
+# Read image
+with open(IMAGE, "rb") as f:
+ image_data = f.read()
+
+response = requests.post(DETECTION_URL, files={"image": image_data}).json()
+
+pprint.pprint(response)
diff --git a/yolov7_seg/cls/utils/flask_rest_api/restapi.py b/yolov7_seg/cls/utils/flask_rest_api/restapi.py
new file mode 100644
index 000000000..c333ee2a1
--- /dev/null
+++ b/yolov7_seg/cls/utils/flask_rest_api/restapi.py
@@ -0,0 +1,46 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run a Flask REST API exposing a YOLOv5s model
+"""
+
+import argparse
+import io
+
+import torch
+from flask import Flask, request
+from PIL import Image
+
+app = Flask(__name__)
+
+DETECTION_URL = "/v1/object-detection/yolov5s"
+
+
+@app.route(DETECTION_URL, methods=["POST"])
+def predict():
+ if request.method != "POST":
+ return
+
+ if request.files.get("image"):
+ # Method 1
+ # with request.files["image"] as f:
+ # im = Image.open(io.BytesIO(f.read()))
+
+ # Method 2
+ im_file = request.files["image"]
+ im_bytes = im_file.read()
+ im = Image.open(io.BytesIO(im_bytes))
+
+ results = model(im, size=640) # reduce size=320 for faster inference
+ return results.pandas().xyxy[0].to_json(orient="records")
+
+
+if __name__ == "__main__":
+ parser = argparse.ArgumentParser(description="Flask API exposing YOLOv5 model")
+ parser.add_argument("--port", default=5000, type=int, help="port number")
+ opt = parser.parse_args()
+
+ # Fix known issue urllib.error.HTTPError 403: rate limit exceeded https://github.com/ultralytics/yolov5/pull/7210
+ torch.hub._validate_not_a_forked_repo = lambda a, b, c: True
+
+ model = torch.hub.load("ultralytics/yolov5", "yolov5s", force_reload=True) # force_reload to recache
+ app.run(host="0.0.0.0", port=opt.port) # debug=True causes Restarting with stat
diff --git a/yolov7_seg/cls/utils/general.py b/yolov7_seg/cls/utils/general.py
new file mode 100644
index 000000000..b3ebc3a68
--- /dev/null
+++ b/yolov7_seg/cls/utils/general.py
@@ -0,0 +1,1043 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+General utils
+"""
+
+import contextlib
+import glob
+import inspect
+import logging
+import math
+import os
+import platform
+import random
+import re
+import shutil
+import signal
+import sys
+import threading
+import time
+import urllib
+from datetime import datetime
+from itertools import repeat
+from multiprocessing.pool import ThreadPool
+from pathlib import Path
+from subprocess import check_output
+from typing import Optional
+from zipfile import ZipFile
+
+import cv2
+import numpy as np
+import pandas as pd
+import pkg_resources as pkg
+import torch
+import torchvision
+import yaml
+
+from utils.downloads import gsutil_getsize
+from utils.metrics import box_iou, fitness
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+RANK = int(os.getenv('RANK', -1))
+
+# Settings
+DATASETS_DIR = ROOT.parent / 'datasets' # YOLOv5 datasets directory
+NUM_THREADS = min(8, max(1, os.cpu_count() - 1)) # number of YOLOv5 multiprocessing threads
+AUTOINSTALL = str(os.getenv('YOLOv5_AUTOINSTALL', True)).lower() == 'true' # global auto-install mode
+VERBOSE = str(os.getenv('YOLOv5_VERBOSE', True)).lower() == 'true' # global verbose mode
+FONT = 'Arial.ttf' # https://ultralytics.com/assets/Arial.ttf
+
+torch.set_printoptions(linewidth=320, precision=5, profile='long')
+np.set_printoptions(linewidth=320, formatter={'float_kind': '{:11.5g}'.format}) # format short g, %precision=5
+pd.options.display.max_columns = 10
+cv2.setNumThreads(0) # prevent OpenCV from multithreading (incompatible with PyTorch DataLoader)
+os.environ['NUMEXPR_MAX_THREADS'] = str(NUM_THREADS) # NumExpr max threads
+os.environ['OMP_NUM_THREADS'] = '1' if platform.system() == 'darwin' else str(NUM_THREADS) # OpenMP (PyTorch and SciPy)
+
+
+def is_kaggle():
+ # Is environment a Kaggle Notebook?
+ try:
+ assert os.environ.get('PWD') == '/kaggle/working'
+ assert os.environ.get('KAGGLE_URL_BASE') == 'https://www.kaggle.com'
+ return True
+ except AssertionError:
+ return False
+
+
+def is_writeable(dir, test=False):
+ # Return True if directory has write permissions, test opening a file with write permissions if test=True
+ if not test:
+ return os.access(dir, os.R_OK) # possible issues on Windows
+ file = Path(dir) / 'tmp.txt'
+ try:
+ with open(file, 'w'): # open file with write permissions
+ pass
+ file.unlink() # remove file
+ return True
+ except OSError:
+ return False
+
+
+def set_logging(name=None, verbose=VERBOSE):
+ # Sets level and returns logger
+ if is_kaggle():
+ for h in logging.root.handlers:
+ logging.root.removeHandler(h) # remove all handlers associated with the root logger object
+ rank = int(os.getenv('RANK', -1)) # rank in world for Multi-GPU trainings
+ level = logging.INFO if verbose and rank in {-1, 0} else logging.ERROR
+ log = logging.getLogger(name)
+ log.setLevel(level)
+ handler = logging.StreamHandler()
+ handler.setFormatter(logging.Formatter("%(message)s"))
+ handler.setLevel(level)
+ log.addHandler(handler)
+
+
+set_logging() # run before defining LOGGER
+LOGGER = logging.getLogger("yolov5") # define globally (used in train.py, val.py, detect.py, etc.)
+
+
+def user_config_dir(dir='Ultralytics', env_var='YOLOV5_CONFIG_DIR'):
+ # Return path of user configuration directory. Prefer environment variable if exists. Make dir if required.
+ env = os.getenv(env_var)
+ if env:
+ path = Path(env) # use environment variable
+ else:
+ cfg = {'Windows': 'AppData/Roaming', 'Linux': '.config', 'Darwin': 'Library/Application Support'} # 3 OS dirs
+ path = Path.home() / cfg.get(platform.system(), '') # OS-specific config dir
+ path = (path if is_writeable(path) else Path('/tmp')) / dir # GCP and AWS lambda fix, only /tmp is writeable
+ path.mkdir(exist_ok=True) # make if required
+ return path
+
+
+CONFIG_DIR = user_config_dir() # Ultralytics settings dir
+
+
+class Profile(contextlib.ContextDecorator):
+ # Usage: @Profile() decorator or 'with Profile():' context manager
+ def __enter__(self):
+ self.start = time.time()
+
+ def __exit__(self, type, value, traceback):
+ print(f'Profile results: {time.time() - self.start:.5f}s')
+
+
+class Timeout(contextlib.ContextDecorator):
+ # Usage: @Timeout(seconds) decorator or 'with Timeout(seconds):' context manager
+ def __init__(self, seconds, *, timeout_msg='', suppress_timeout_errors=True):
+ self.seconds = int(seconds)
+ self.timeout_message = timeout_msg
+ self.suppress = bool(suppress_timeout_errors)
+
+ def _timeout_handler(self, signum, frame):
+ raise TimeoutError(self.timeout_message)
+
+ def __enter__(self):
+ if platform.system() != 'Windows': # not supported on Windows
+ signal.signal(signal.SIGALRM, self._timeout_handler) # Set handler for SIGALRM
+ signal.alarm(self.seconds) # start countdown for SIGALRM to be raised
+
+ def __exit__(self, exc_type, exc_val, exc_tb):
+ if platform.system() != 'Windows':
+ signal.alarm(0) # Cancel SIGALRM if it's scheduled
+ if self.suppress and exc_type is TimeoutError: # Suppress TimeoutError
+ return True
+
+
+class WorkingDirectory(contextlib.ContextDecorator):
+ # Usage: @WorkingDirectory(dir) decorator or 'with WorkingDirectory(dir):' context manager
+ def __init__(self, new_dir):
+ self.dir = new_dir # new dir
+ self.cwd = Path.cwd().resolve() # current dir
+
+ def __enter__(self):
+ os.chdir(self.dir)
+
+ def __exit__(self, exc_type, exc_val, exc_tb):
+ os.chdir(self.cwd)
+
+
+def try_except(func):
+ # try-except function. Usage: @try_except decorator
+ def handler(*args, **kwargs):
+ try:
+ func(*args, **kwargs)
+ except Exception as e:
+ print(e)
+
+ return handler
+
+
+def threaded(func):
+ # Multi-threads a target function and returns thread. Usage: @threaded decorator
+ def wrapper(*args, **kwargs):
+ thread = threading.Thread(target=func, args=args, kwargs=kwargs, daemon=True)
+ thread.start()
+ return thread
+
+ return wrapper
+
+
+def methods(instance):
+ # Get class/instance methods
+ return [f for f in dir(instance) if callable(getattr(instance, f)) and not f.startswith("__")]
+
+
+def print_args(args: Optional[dict] = None, show_file=True, show_fcn=False):
+ # Print function arguments (optional args dict)
+ x = inspect.currentframe().f_back # previous frame
+ file, _, fcn, _, _ = inspect.getframeinfo(x)
+ if args is None: # get args automatically
+ args, _, _, frm = inspect.getargvalues(x)
+ args = {k: v for k, v in frm.items() if k in args}
+ s = (f'{Path(file).stem}: ' if show_file else '') + (f'{fcn}: ' if show_fcn else '')
+ LOGGER.info(colorstr(s) + ', '.join(f'{k}={v}' for k, v in args.items()))
+
+
+def init_seeds(seed=0, deterministic=False):
+ # Initialize random number generator (RNG) seeds https://pytorch.org/docs/stable/notes/randomness.html
+ # cudnn seed 0 settings are slower and more reproducible, else faster and less reproducible
+ import torch.backends.cudnn as cudnn
+
+ if deterministic and check_version(torch.__version__, '1.12.0'): # https://github.com/ultralytics/yolov5/pull/8213
+ torch.use_deterministic_algorithms(True)
+ os.environ['CUBLAS_WORKSPACE_CONFIG'] = ':4096:8'
+ os.environ['PYTHONHASHSEED'] = str(seed)
+
+ random.seed(seed)
+ np.random.seed(seed)
+ torch.manual_seed(seed)
+ cudnn.benchmark, cudnn.deterministic = (False, True) if seed == 0 else (True, False)
+ torch.cuda.manual_seed(seed)
+ torch.cuda.manual_seed_all(seed) # for Multi-GPU, exception safe
+
+
+def intersect_dicts(da, db, exclude=()):
+ # Dictionary intersection of matching keys and shapes, omitting 'exclude' keys, using da values
+ return {k: v for k, v in da.items() if k in db and not any(x in k for x in exclude) and v.shape == db[k].shape}
+
+
+def get_latest_run(search_dir='.'):
+ # Return path to most recent 'last.pt' in /runs (i.e. to --resume from)
+ last_list = glob.glob(f'{search_dir}/**/last*.pt', recursive=True)
+ return max(last_list, key=os.path.getctime) if last_list else ''
+
+
+def is_docker() -> bool:
+ """Check if the process runs inside a docker container."""
+ if Path("/.dockerenv").exists():
+ return True
+ try: # check if docker is in control groups
+ with open("/proc/self/cgroup") as file:
+ return any("docker" in line for line in file)
+ except OSError:
+ return False
+
+
+def is_colab():
+ # Is environment a Google Colab instance?
+ try:
+ import google.colab
+ return True
+ except ImportError:
+ return False
+
+
+def is_pip():
+ # Is file in a pip package?
+ return 'site-packages' in Path(__file__).resolve().parts
+
+
+def is_ascii(s=''):
+ # Is string composed of all ASCII (no UTF) characters? (note str().isascii() introduced in python 3.7)
+ s = str(s) # convert list, tuple, None, etc. to str
+ return len(s.encode().decode('ascii', 'ignore')) == len(s)
+
+
+def is_chinese(s='人工智能'):
+ # Is string composed of any Chinese characters?
+ return bool(re.search('[\u4e00-\u9fff]', str(s)))
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+def file_age(path=__file__):
+ # Return days since last file update
+ dt = (datetime.now() - datetime.fromtimestamp(Path(path).stat().st_mtime)) # delta
+ return dt.days # + dt.seconds / 86400 # fractional days
+
+
+def file_date(path=__file__):
+ # Return human-readable file modification date, i.e. '2021-3-26'
+ t = datetime.fromtimestamp(Path(path).stat().st_mtime)
+ return f'{t.year}-{t.month}-{t.day}'
+
+
+def file_size(path):
+ # Return file/dir size (MB)
+ mb = 1 << 20 # bytes to MiB (1024 ** 2)
+ path = Path(path)
+ if path.is_file():
+ return path.stat().st_size / mb
+ elif path.is_dir():
+ return sum(f.stat().st_size for f in path.glob('**/*') if f.is_file()) / mb
+ else:
+ return 0.0
+
+
+def check_online():
+ # Check internet connectivity
+ import socket
+ try:
+ socket.create_connection(("1.1.1.1", 443), 5) # check host accessibility
+ return True
+ except OSError:
+ return False
+
+
+def git_describe(path=ROOT): # path must be a directory
+ # Return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
+ try:
+ assert (Path(path) / '.git').is_dir()
+ return check_output(f'git -C {path} describe --tags --long --always', shell=True).decode()[:-1]
+ except Exception:
+ return ''
+
+
+@try_except
+@WorkingDirectory(ROOT)
+def check_git_status(repo='ultralytics/yolov5'):
+ # YOLOv5 status check, recommend 'git pull' if code is out of date
+ url = f'https://github.com/{repo}'
+ msg = f', for updates see {url}'
+ s = colorstr('github: ') # string
+ assert Path('.git').exists(), s + 'skipping check (not a git repository)' + msg
+ assert check_online(), s + 'skipping check (offline)' + msg
+
+ splits = re.split(pattern=r'\s', string=check_output('git remote -v', shell=True).decode())
+ matches = [repo in s for s in splits]
+ if any(matches):
+ remote = splits[matches.index(True) - 1]
+ else:
+ remote = 'ultralytics'
+ check_output(f'git remote add {remote} {url}', shell=True)
+ check_output(f'git fetch {remote}', shell=True, timeout=5) # git fetch
+ branch = check_output('git rev-parse --abbrev-ref HEAD', shell=True).decode().strip() # checked out
+ n = int(check_output(f'git rev-list {branch}..{remote}/master --count', shell=True)) # commits behind
+ if n > 0:
+ pull = 'git pull' if remote == 'origin' else f'git pull {remote} master'
+ s += f"⚠️ YOLOv5 is out of date by {n} commit{'s' * (n > 1)}. Use `{pull}` or `git clone {url}` to update."
+ else:
+ s += f'up to date with {url} ✅'
+ LOGGER.info(emojis(s)) # emoji-safe
+
+
+def check_python(minimum='3.7.0'):
+ # Check current python version vs. required python version
+ check_version(platform.python_version(), minimum, name='Python ', hard=True)
+
+
+def check_version(current='0.0.0', minimum='0.0.0', name='version ', pinned=False, hard=False, verbose=False):
+ # Check version vs. required version
+ current, minimum = (pkg.parse_version(x) for x in (current, minimum))
+ result = (current == minimum) if pinned else (current >= minimum) # bool
+ s = f'{name}{minimum} required by YOLOv5, but {name}{current} is currently installed' # string
+ if hard:
+ assert result, s # assert min requirements met
+ if verbose and not result:
+ LOGGER.warning(s)
+ return result
+
+
+@try_except
+def check_requirements(requirements=ROOT / 'requirements.txt', exclude=(), install=True, cmds=()):
+ # Check installed dependencies meet requirements (pass *.txt file or list of packages)
+ prefix = colorstr('red', 'bold', 'requirements:')
+ check_python() # check python version
+ if isinstance(requirements, (str, Path)): # requirements.txt file
+ file = Path(requirements)
+ assert file.exists(), f"{prefix} {file.resolve()} not found, check failed."
+ with file.open() as f:
+ requirements = [f'{x.name}{x.specifier}' for x in pkg.parse_requirements(f) if x.name not in exclude]
+ else: # list or tuple of packages
+ requirements = [x for x in requirements if x not in exclude]
+
+ n = 0 # number of packages updates
+ for i, r in enumerate(requirements):
+ try:
+ pkg.require(r)
+ except Exception: # DistributionNotFound or VersionConflict if requirements not met
+ s = f"{prefix} {r} not found and is required by YOLOv5"
+ if install and AUTOINSTALL: # check environment variable
+ LOGGER.info(f"{s}, attempting auto-update...")
+ try:
+ assert check_online(), f"'pip install {r}' skipped (offline)"
+ LOGGER.info(check_output(f'pip install "{r}" {cmds[i] if cmds else ""}', shell=True).decode())
+ n += 1
+ except Exception as e:
+ LOGGER.warning(f'{prefix} {e}')
+ else:
+ LOGGER.info(f'{s}. Please install and rerun your command.')
+
+ if n: # if packages updated
+ source = file.resolve() if 'file' in locals() else requirements
+ s = f"{prefix} {n} package{'s' * (n > 1)} updated per {source}\n" \
+ f"{prefix} ⚠️ {colorstr('bold', 'Restart runtime or rerun command for updates to take effect')}\n"
+ LOGGER.info(emojis(s))
+
+
+def check_img_size(imgsz, s=32, floor=0):
+ # Verify image size is a multiple of stride s in each dimension
+ if isinstance(imgsz, int): # integer i.e. img_size=640
+ new_size = max(make_divisible(imgsz, int(s)), floor)
+ else: # list i.e. img_size=[640, 480]
+ imgsz = list(imgsz) # convert to list if tuple
+ new_size = [max(make_divisible(x, int(s)), floor) for x in imgsz]
+ if new_size != imgsz:
+ LOGGER.warning(f'WARNING: --img-size {imgsz} must be multiple of max stride {s}, updating to {new_size}')
+ return new_size
+
+
+def check_imshow():
+ # Check if environment supports image displays
+ try:
+ assert not is_docker(), 'cv2.imshow() is disabled in Docker environments'
+ assert not is_colab(), 'cv2.imshow() is disabled in Google Colab environments'
+ cv2.imshow('test', np.zeros((1, 1, 3)))
+ cv2.waitKey(1)
+ cv2.destroyAllWindows()
+ cv2.waitKey(1)
+ return True
+ except Exception as e:
+ LOGGER.warning(f'WARNING: Environment does not support cv2.imshow() or PIL Image.show() image displays\n{e}')
+ return False
+
+
+def check_suffix(file='yolov5s.pt', suffix=('.pt',), msg=''):
+ # Check file(s) for acceptable suffix
+ if file and suffix:
+ if isinstance(suffix, str):
+ suffix = [suffix]
+ for f in file if isinstance(file, (list, tuple)) else [file]:
+ s = Path(f).suffix.lower() # file suffix
+ if len(s):
+ assert s in suffix, f"{msg}{f} acceptable suffix is {suffix}"
+
+
+def check_yaml(file, suffix=('.yaml', '.yml')):
+ # Search/download YAML file (if necessary) and return path, checking suffix
+ return check_file(file, suffix)
+
+
+def check_file(file, suffix=''):
+ # Search/download file (if necessary) and return path
+ check_suffix(file, suffix) # optional
+ file = str(file) # convert to str()
+ if Path(file).is_file() or not file: # exists
+ return file
+ elif file.startswith(('http:/', 'https:/')): # download
+ url = file # warning: Pathlib turns :// -> :/
+ file = Path(urllib.parse.unquote(file).split('?')[0]).name # '%2F' to '/', split https://url.com/file.txt?auth
+ if Path(file).is_file():
+ LOGGER.info(f'Found {url} locally at {file}') # file already exists
+ else:
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, file)
+ assert Path(file).exists() and Path(file).stat().st_size > 0, f'File download failed: {url}' # check
+ return file
+ elif file.startswith('clearml://'): # ClearML Dataset ID
+ assert 'clearml' in sys.modules, "ClearML is not installed, so cannot use ClearML dataset. Try running 'pip install clearml'."
+ return file
+ else: # search
+ files = []
+ for d in 'data', 'models', 'utils': # search directories
+ files.extend(glob.glob(str(ROOT / d / '**' / file), recursive=True)) # find file
+ assert len(files), f'File not found: {file}' # assert file was found
+ assert len(files) == 1, f"Multiple files match '{file}', specify exact path: {files}" # assert unique
+ return files[0] # return file
+
+
+def check_font(font=FONT, progress=False):
+ # Download font to CONFIG_DIR if necessary
+ font = Path(font)
+ file = CONFIG_DIR / font.name
+ if not font.exists() and not file.exists():
+ url = "https://ultralytics.com/assets/" + font.name
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, str(file), progress=progress)
+
+
+def check_dataset(data, autodownload=True):
+ # Download, check and/or unzip dataset if not found locally
+
+ # Download (optional)
+ extract_dir = ''
+ if isinstance(data, (str, Path)) and str(data).endswith('.zip'): # i.e. gs://bucket/dir/coco128.zip
+ download(data, dir=DATASETS_DIR, unzip=True, delete=False, curl=False, threads=1)
+ data = next((DATASETS_DIR / Path(data).stem).rglob('*.yaml'))
+ extract_dir, autodownload = data.parent, False
+
+ # Read yaml (optional)
+ if isinstance(data, (str, Path)):
+ with open(data, errors='ignore') as f:
+ data = yaml.safe_load(f) # dictionary
+
+ # Checks
+ for k in 'train', 'val', 'nc':
+ assert k in data, emojis(f"data.yaml '{k}:' field missing ❌")
+ if 'names' not in data:
+ LOGGER.warning(emojis("data.yaml 'names:' field missing ⚠️, assigning default names 'class0', 'class1', etc."))
+ data['names'] = [f'class{i}' for i in range(data['nc'])] # default names
+
+ # Resolve paths
+ path = Path(extract_dir or data.get('path') or '') # optional 'path' default to '.'
+ if not path.is_absolute():
+ path = (ROOT / path).resolve()
+ for k in 'train', 'val', 'test':
+ if data.get(k): # prepend path
+ data[k] = str(path / data[k]) if isinstance(data[k], str) else [str(path / x) for x in data[k]]
+
+ # Parse yaml
+ train, val, test, s = (data.get(x) for x in ('train', 'val', 'test', 'download'))
+ if val:
+ val = [Path(x).resolve() for x in (val if isinstance(val, list) else [val])] # val path
+ if not all(x.exists() for x in val):
+ LOGGER.info(emojis('\nDataset not found ⚠️, missing paths %s' % [str(x) for x in val if not x.exists()]))
+ if not s or not autodownload:
+ raise Exception(emojis('Dataset not found ❌'))
+ t = time.time()
+ root = path.parent if 'path' in data else '..' # unzip directory i.e. '../'
+ if s.startswith('http') and s.endswith('.zip'): # URL
+ f = Path(s).name # filename
+ LOGGER.info(f'Downloading {s} to {f}...')
+ torch.hub.download_url_to_file(s, f)
+ Path(root).mkdir(parents=True, exist_ok=True) # create root
+ ZipFile(f).extractall(path=root) # unzip
+ Path(f).unlink() # remove zip
+ r = None # success
+ elif s.startswith('bash '): # bash script
+ LOGGER.info(f'Running {s} ...')
+ r = os.system(s)
+ else: # python script
+ r = exec(s, {'yaml': data}) # return None
+ dt = f'({round(time.time() - t, 1)}s)'
+ s = f"success ✅ {dt}, saved to {colorstr('bold', root)}" if r in (0, None) else f"failure {dt} ❌"
+ LOGGER.info(emojis(f"Dataset download {s}"))
+ check_font('Arial.ttf' if is_ascii(data['names']) else 'Arial.Unicode.ttf', progress=True) # download fonts
+ return data # dictionary
+
+
+def check_amp(model):
+ # Check PyTorch Automatic Mixed Precision (AMP) functionality. Return True on correct operation
+ from models.common import AutoShape, DetectMultiBackend
+
+ def amp_allclose(model, im):
+ # All close FP32 vs AMP results
+ m = AutoShape(model, verbose=False) # model
+ a = m(im).xywhn[0] # FP32 inference
+ m.amp = True
+ b = m(im).xywhn[0] # AMP inference
+ return a.shape == b.shape and torch.allclose(a, b, atol=0.1) # close to 10% absolute tolerance
+
+ prefix = colorstr('AMP: ')
+ device = next(model.parameters()).device # get model device
+ if device.type == 'cpu':
+ return False # AMP disabled on CPU
+ f = ROOT / 'data' / 'images' / 'bus.jpg' # image to check
+ im = f if f.exists() else 'https://ultralytics.com/images/bus.jpg' if check_online() else np.ones((640, 640, 3))
+ try:
+ assert amp_allclose(model, im) or amp_allclose(DetectMultiBackend('yolov5n.pt', device), im)
+ LOGGER.info(emojis(f'{prefix}checks passed ✅'))
+ return True
+ except Exception:
+ help_url = 'https://github.com/ultralytics/yolov5/issues/7908'
+ LOGGER.warning(emojis(f'{prefix}checks failed ❌, disabling Automatic Mixed Precision. See {help_url}'))
+ return False
+
+
+def url2file(url):
+ # Convert URL to filename, i.e. https://url.com/file.txt?auth -> file.txt
+ url = str(Path(url)).replace(':/', '://') # Pathlib turns :// -> :/
+ return Path(urllib.parse.unquote(url)).name.split('?')[0] # '%2F' to '/', split https://url.com/file.txt?auth
+
+
+def download(url, dir='.', unzip=True, delete=True, curl=False, threads=1, retry=3):
+ # Multi-threaded file download and unzip function, used in data.yaml for autodownload
+ def download_one(url, dir):
+ # Download 1 file
+ success = True
+ f = dir / Path(url).name # filename
+ if Path(url).is_file(): # exists in current path
+ Path(url).rename(f) # move to dir
+ elif not f.exists():
+ LOGGER.info(f'Downloading {url} to {f}...')
+ for i in range(retry + 1):
+ if curl:
+ s = 'sS' if threads > 1 else '' # silent
+ r = os.system(f'curl -{s}L "{url}" -o "{f}" --retry 9 -C -') # curl download with retry, continue
+ success = r == 0
+ else:
+ torch.hub.download_url_to_file(url, f, progress=threads == 1) # torch download
+ success = f.is_file()
+ if success:
+ break
+ elif i < retry:
+ LOGGER.warning(f'Download failure, retrying {i + 1}/{retry} {url}...')
+ else:
+ LOGGER.warning(f'Failed to download {url}...')
+
+ if unzip and success and f.suffix in ('.zip', '.gz'):
+ LOGGER.info(f'Unzipping {f}...')
+ if f.suffix == '.zip':
+ ZipFile(f).extractall(path=dir) # unzip
+ elif f.suffix == '.gz':
+ os.system(f'tar xfz {f} --directory {f.parent}') # unzip
+ if delete:
+ f.unlink() # remove zip
+
+ dir = Path(dir)
+ dir.mkdir(parents=True, exist_ok=True) # make directory
+ if threads > 1:
+ pool = ThreadPool(threads)
+ pool.imap(lambda x: download_one(*x), zip(url, repeat(dir))) # multi-threaded
+ pool.close()
+ pool.join()
+ else:
+ for u in [url] if isinstance(url, (str, Path)) else url:
+ download_one(u, dir)
+
+
+def make_divisible(x, divisor):
+ # Returns nearest x divisible by divisor
+ if isinstance(divisor, torch.Tensor):
+ divisor = int(divisor.max()) # to int
+ return math.ceil(x / divisor) * divisor
+
+
+def clean_str(s):
+ # Cleans a string by replacing special characters with underscore _
+ return re.sub(pattern="[|@#!¡·$€%&()=?¿^*;:,¨´><+]", repl="_", string=s)
+
+
+def one_cycle(y1=0.0, y2=1.0, steps=100):
+ # lambda function for sinusoidal ramp from y1 to y2 https://arxiv.org/pdf/1812.01187.pdf
+ return lambda x: ((1 - math.cos(x * math.pi / steps)) / 2) * (y2 - y1) + y1
+
+
+def colorstr(*input):
+ # Colors a string https://en.wikipedia.org/wiki/ANSI_escape_code, i.e. colorstr('blue', 'hello world')
+ *args, string = input if len(input) > 1 else ('blue', 'bold', input[0]) # color arguments, string
+ colors = {
+ 'black': '\033[30m', # basic colors
+ 'red': '\033[31m',
+ 'green': '\033[32m',
+ 'yellow': '\033[33m',
+ 'blue': '\033[34m',
+ 'magenta': '\033[35m',
+ 'cyan': '\033[36m',
+ 'white': '\033[37m',
+ 'bright_black': '\033[90m', # bright colors
+ 'bright_red': '\033[91m',
+ 'bright_green': '\033[92m',
+ 'bright_yellow': '\033[93m',
+ 'bright_blue': '\033[94m',
+ 'bright_magenta': '\033[95m',
+ 'bright_cyan': '\033[96m',
+ 'bright_white': '\033[97m',
+ 'end': '\033[0m', # misc
+ 'bold': '\033[1m',
+ 'underline': '\033[4m'}
+ return ''.join(colors[x] for x in args) + f'{string}' + colors['end']
+
+
+def labels_to_class_weights(labels, nc=80):
+ # Get class weights (inverse frequency) from training labels
+ if labels[0] is None: # no labels loaded
+ return torch.Tensor()
+
+ labels = np.concatenate(labels, 0) # labels.shape = (866643, 5) for COCO
+ classes = labels[:, 0].astype(int) # labels = [class xywh]
+ weights = np.bincount(classes, minlength=nc) # occurrences per class
+
+ # Prepend gridpoint count (for uCE training)
+ # gpi = ((320 / 32 * np.array([1, 2, 4])) ** 2 * 3).sum() # gridpoints per image
+ # weights = np.hstack([gpi * len(labels) - weights.sum() * 9, weights * 9]) ** 0.5 # prepend gridpoints to start
+
+ weights[weights == 0] = 1 # replace empty bins with 1
+ weights = 1 / weights # number of targets per class
+ weights /= weights.sum() # normalize
+ return torch.from_numpy(weights).float()
+
+
+def labels_to_image_weights(labels, nc=80, class_weights=np.ones(80)):
+ # Produces image weights based on class_weights and image contents
+ # Usage: index = random.choices(range(n), weights=image_weights, k=1) # weighted image sample
+ class_counts = np.array([np.bincount(x[:, 0].astype(int), minlength=nc) for x in labels])
+ return (class_weights.reshape(1, nc) * class_counts).sum(1)
+
+
+def coco80_to_coco91_class(): # converts 80-index (val2014) to 91-index (paper)
+ # https://tech.amikelive.com/node-718/what-object-categories-labels-are-in-coco-dataset/
+ # a = np.loadtxt('data/coco.names', dtype='str', delimiter='\n')
+ # b = np.loadtxt('data/coco_paper.names', dtype='str', delimiter='\n')
+ # x1 = [list(a[i] == b).index(True) + 1 for i in range(80)] # darknet to coco
+ # x2 = [list(b[i] == a).index(True) if any(b[i] == a) else None for i in range(91)] # coco to darknet
+ return [
+ 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 27, 28, 31, 32, 33, 34,
+ 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63,
+ 64, 65, 67, 70, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 84, 85, 86, 87, 88, 89, 90]
+
+
+def xyxy2xywh(x):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = (x[:, 0] + x[:, 2]) / 2 # x center
+ y[:, 1] = (x[:, 1] + x[:, 3]) / 2 # y center
+ y[:, 2] = x[:, 2] - x[:, 0] # width
+ y[:, 3] = x[:, 3] - x[:, 1] # height
+ return y
+
+
+def xywh2xyxy(x):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
+ y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
+ y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
+ y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
+ return y
+
+
+def xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):
+ # Convert nx4 boxes from [x, y, w, h] normalized to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * (x[:, 0] - x[:, 2] / 2) + padw # top left x
+ y[:, 1] = h * (x[:, 1] - x[:, 3] / 2) + padh # top left y
+ y[:, 2] = w * (x[:, 0] + x[:, 2] / 2) + padw # bottom right x
+ y[:, 3] = h * (x[:, 1] + x[:, 3] / 2) + padh # bottom right y
+ return y
+
+
+def xyxy2xywhn(x, w=640, h=640, clip=False, eps=0.0):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] normalized where xy1=top-left, xy2=bottom-right
+ if clip:
+ clip_coords(x, (h - eps, w - eps)) # warning: inplace clip
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = ((x[:, 0] + x[:, 2]) / 2) / w # x center
+ y[:, 1] = ((x[:, 1] + x[:, 3]) / 2) / h # y center
+ y[:, 2] = (x[:, 2] - x[:, 0]) / w # width
+ y[:, 3] = (x[:, 3] - x[:, 1]) / h # height
+ return y
+
+
+def xyn2xy(x, w=640, h=640, padw=0, padh=0):
+ # Convert normalized segments into pixel segments, shape (n,2)
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * x[:, 0] + padw # top left x
+ y[:, 1] = h * x[:, 1] + padh # top left y
+ return y
+
+
+def segment2box(segment, width=640, height=640):
+ # Convert 1 segment label to 1 box label, applying inside-image constraint, i.e. (xy1, xy2, ...) to (xyxy)
+ x, y = segment.T # segment xy
+ inside = (x >= 0) & (y >= 0) & (x <= width) & (y <= height)
+ x, y, = x[inside], y[inside]
+ return np.array([x.min(), y.min(), x.max(), y.max()]) if any(x) else np.zeros((1, 4)) # xyxy
+
+
+def segments2boxes(segments):
+ # Convert segment labels to box labels, i.e. (cls, xy1, xy2, ...) to (cls, xywh)
+ boxes = []
+ for s in segments:
+ x, y = s.T # segment xy
+ boxes.append([x.min(), y.min(), x.max(), y.max()]) # cls, xyxy
+ return xyxy2xywh(np.array(boxes)) # cls, xywh
+
+
+def resample_segments(segments, n=1000):
+ # Up-sample an (n,2) segment
+ for i, s in enumerate(segments):
+ s = np.concatenate((s, s[0:1, :]), axis=0)
+ x = np.linspace(0, len(s) - 1, n)
+ xp = np.arange(len(s))
+ segments[i] = np.concatenate([np.interp(x, xp, s[:, i]) for i in range(2)]).reshape(2, -1).T # segment xy
+ return segments
+
+
+def scale_coords(img1_shape, coords, img0_shape, ratio_pad=None):
+ # Rescale coords (xyxy) from img1_shape to img0_shape
+ if ratio_pad is None: # calculate from img0_shape
+ gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
+ pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
+ else:
+ gain = ratio_pad[0][0]
+ pad = ratio_pad[1]
+
+ coords[:, [0, 2]] -= pad[0] # x padding
+ coords[:, [1, 3]] -= pad[1] # y padding
+ coords[:, :4] /= gain
+ clip_coords(coords, img0_shape)
+ return coords
+
+
+def clip_coords(boxes, shape):
+ # Clip bounding xyxy bounding boxes to image shape (height, width)
+ if isinstance(boxes, torch.Tensor): # faster individually
+ boxes[:, 0].clamp_(0, shape[1]) # x1
+ boxes[:, 1].clamp_(0, shape[0]) # y1
+ boxes[:, 2].clamp_(0, shape[1]) # x2
+ boxes[:, 3].clamp_(0, shape[0]) # y2
+ else: # np.array (faster grouped)
+ boxes[:, [0, 2]] = boxes[:, [0, 2]].clip(0, shape[1]) # x1, x2
+ boxes[:, [1, 3]] = boxes[:, [1, 3]].clip(0, shape[0]) # y1, y2
+
+
+def non_max_suppression(prediction,
+ conf_thres=0.25,
+ iou_thres=0.45,
+ classes=None,
+ agnostic=False,
+ multi_label=False,
+ labels=(),
+ max_det=300):
+ """Non-Maximum Suppression (NMS) on inference results to reject overlapping bounding boxes
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+
+ bs = prediction.shape[0] # batch size
+ nc = prediction.shape[2] - 5 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Checks
+ assert 0 <= conf_thres <= 1, f'Invalid Confidence threshold {conf_thres}, valid values are between 0.0 and 1.0'
+ assert 0 <= iou_thres <= 1, f'Invalid IoU {iou_thres}, valid values are between 0.0 and 1.0'
+
+ # Settings
+ # min_wh = 2 # (pixels) minimum box width and height
+ max_wh = 7680 # (pixels) maximum box width and height
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 0.3 + 0.03 * bs # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0, 6), device=prediction.device)] * bs
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ lb = labels[xi]
+ v = torch.zeros((len(lb), nc + 5), device=x.device)
+ v[:, :4] = lb[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(lb)), lb[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ LOGGER.warning(f'WARNING: NMS time limit {time_limit:.3f}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def strip_optimizer(f='best.pt', s=''): # from utils.general import *; strip_optimizer()
+ # Strip optimizer from 'f' to finalize training, optionally save as 's'
+ x = torch.load(f, map_location=torch.device('cpu'))
+ if x.get('ema'):
+ x['model'] = x['ema'] # replace model with ema
+ for k in 'optimizer', 'best_fitness', 'wandb_id', 'ema', 'updates': # keys
+ x[k] = None
+ x['epoch'] = -1
+ x['model'].half() # to FP16
+ for p in x['model'].parameters():
+ p.requires_grad = False
+ torch.save(x, s or f)
+ mb = os.path.getsize(s or f) / 1E6 # filesize
+ LOGGER.info(f"Optimizer stripped from {f},{f' saved as {s},' if s else ''} {mb:.1f}MB")
+
+
+def print_mutation(results, hyp, save_dir, bucket, prefix=colorstr('evolve: ')):
+ evolve_csv = save_dir / 'evolve.csv'
+ evolve_yaml = save_dir / 'hyp_evolve.yaml'
+ keys = ('metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/mAP_0.5:0.95', 'val/box_loss',
+ 'val/obj_loss', 'val/cls_loss') + tuple(hyp.keys()) # [results + hyps]
+ keys = tuple(x.strip() for x in keys)
+ vals = results + tuple(hyp.values())
+ n = len(keys)
+
+ # Download (optional)
+ if bucket:
+ url = f'gs://{bucket}/evolve.csv'
+ if gsutil_getsize(url) > (evolve_csv.stat().st_size if evolve_csv.exists() else 0):
+ os.system(f'gsutil cp {url} {save_dir}') # download evolve.csv if larger than local
+
+ # Log to evolve.csv
+ s = '' if evolve_csv.exists() else (('%20s,' * n % keys).rstrip(',') + '\n') # add header
+ with open(evolve_csv, 'a') as f:
+ f.write(s + ('%20.5g,' * n % vals).rstrip(',') + '\n')
+
+ # Save yaml
+ with open(evolve_yaml, 'w') as f:
+ data = pd.read_csv(evolve_csv)
+ data = data.rename(columns=lambda x: x.strip()) # strip keys
+ i = np.argmax(fitness(data.values[:, :4])) #
+ generations = len(data)
+ f.write('# YOLOv5 Hyperparameter Evolution Results\n' + f'# Best generation: {i}\n' +
+ f'# Last generation: {generations - 1}\n' + '# ' + ', '.join(f'{x.strip():>20s}' for x in keys[:7]) +
+ '\n' + '# ' + ', '.join(f'{x:>20.5g}' for x in data.values[i, :7]) + '\n\n')
+ yaml.safe_dump(data.loc[i][7:].to_dict(), f, sort_keys=False)
+
+ # Print to screen
+ LOGGER.info(prefix + f'{generations} generations finished, current result:\n' + prefix +
+ ', '.join(f'{x.strip():>20s}' for x in keys) + '\n' + prefix + ', '.join(f'{x:20.5g}'
+ for x in vals) + '\n\n')
+
+ if bucket:
+ os.system(f'gsutil cp {evolve_csv} {evolve_yaml} gs://{bucket}') # upload
+
+
+def apply_classifier(x, model, img, im0):
+ # Apply a second stage classifier to YOLO outputs
+ # Example model = torchvision.models.__dict__['efficientnet_b0'](pretrained=True).to(device).eval()
+ im0 = [im0] if isinstance(im0, np.ndarray) else im0
+ for i, d in enumerate(x): # per image
+ if d is not None and len(d):
+ d = d.clone()
+
+ # Reshape and pad cutouts
+ b = xyxy2xywh(d[:, :4]) # boxes
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # rectangle to square
+ b[:, 2:] = b[:, 2:] * 1.3 + 30 # pad
+ d[:, :4] = xywh2xyxy(b).long()
+
+ # Rescale boxes from img_size to im0 size
+ scale_coords(img.shape[2:], d[:, :4], im0[i].shape)
+
+ # Classes
+ pred_cls1 = d[:, 5].long()
+ ims = []
+ for a in d:
+ cutout = im0[i][int(a[1]):int(a[3]), int(a[0]):int(a[2])]
+ im = cv2.resize(cutout, (224, 224)) # BGR
+
+ im = im[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ im = np.ascontiguousarray(im, dtype=np.float32) # uint8 to float32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ ims.append(im)
+
+ pred_cls2 = model(torch.Tensor(ims).to(d.device)).argmax(1) # classifier prediction
+ x[i] = x[i][pred_cls1 == pred_cls2] # retain matching class detections
+
+ return x
+
+
+def increment_path(path, exist_ok=False, sep='', mkdir=False):
+ # Increment file or directory path, i.e. runs/exp --> runs/exp{sep}2, runs/exp{sep}3, ... etc.
+ path = Path(path) # os-agnostic
+ if path.exists() and not exist_ok:
+ path, suffix = (path.with_suffix(''), path.suffix) if path.is_file() else (path, '')
+
+ # Method 1
+ for n in range(2, 9999):
+ p = f'{path}{sep}{n}{suffix}' # increment path
+ if not os.path.exists(p): #
+ break
+ path = Path(p)
+
+ # Method 2 (deprecated)
+ # dirs = glob.glob(f"{path}{sep}*") # similar paths
+ # matches = [re.search(rf"{path.stem}{sep}(\d+)", d) for d in dirs]
+ # i = [int(m.groups()[0]) for m in matches if m] # indices
+ # n = max(i) + 1 if i else 2 # increment number
+ # path = Path(f"{path}{sep}{n}{suffix}") # increment path
+
+ if mkdir:
+ path.mkdir(parents=True, exist_ok=True) # make directory
+
+ return path
+
+
+# OpenCV Chinese-friendly functions ------------------------------------------------------------------------------------
+imshow_ = cv2.imshow # copy to avoid recursion errors
+
+
+def imread(path, flags=cv2.IMREAD_COLOR):
+ return cv2.imdecode(np.fromfile(path, np.uint8), flags)
+
+
+def imwrite(path, im):
+ try:
+ cv2.imencode(Path(path).suffix, im)[1].tofile(path)
+ return True
+ except Exception:
+ return False
+
+
+def imshow(path, im):
+ imshow_(path.encode('unicode_escape').decode(), im)
+
+
+cv2.imread, cv2.imwrite, cv2.imshow = imread, imwrite, imshow # redefine
+
+# Variables ------------------------------------------------------------------------------------------------------------
+NCOLS = 0 if is_docker() else shutil.get_terminal_size().columns # terminal window size for tqdm
diff --git a/yolov7_seg/cls/utils/google_app_engine/Dockerfile b/yolov7_seg/cls/utils/google_app_engine/Dockerfile
new file mode 100644
index 000000000..d889610b1
--- /dev/null
+++ b/yolov7_seg/cls/utils/google_app_engine/Dockerfile
@@ -0,0 +1,25 @@
+FROM gcr.io/google-appengine/python
+
+# Create a virtualenv for dependencies. This isolates these packages from
+# system-level packages.
+# Use -p python3 or -p python3.7 to select python version. Default is version 2.
+RUN virtualenv /env -p python3
+
+# Setting these environment variables are the same as running
+# source /env/bin/activate.
+ENV VIRTUAL_ENV /env
+ENV PATH /env/bin:$PATH
+
+RUN apt-get update && apt-get install -y python-opencv
+
+# Copy the application's requirements.txt and run pip to install all
+# dependencies into the virtualenv.
+ADD requirements.txt /app/requirements.txt
+RUN pip install -r /app/requirements.txt
+
+# Add the application source code.
+ADD . /app
+
+# Run a WSGI server to serve the application. gunicorn must be declared as
+# a dependency in requirements.txt.
+CMD gunicorn -b :$PORT main:app
diff --git a/yolov7_seg/cls/utils/google_app_engine/additional_requirements.txt b/yolov7_seg/cls/utils/google_app_engine/additional_requirements.txt
new file mode 100644
index 000000000..ed71f8407
--- /dev/null
+++ b/yolov7_seg/cls/utils/google_app_engine/additional_requirements.txt
@@ -0,0 +1,4 @@
+# add these requirements in your app on top of the existing ones
+pip==21.1
+Flask==1.0.2
+gunicorn==19.9.0
diff --git a/yolov7_seg/cls/utils/google_app_engine/app.yaml b/yolov7_seg/cls/utils/google_app_engine/app.yaml
new file mode 100644
index 000000000..1cad968c6
--- /dev/null
+++ b/yolov7_seg/cls/utils/google_app_engine/app.yaml
@@ -0,0 +1,14 @@
+runtime: custom
+env: flex
+
+service: yolov5app
+
+liveness_check:
+ initial_delay_sec: 600
+
+manual_scaling:
+ instances: 1
+resources:
+ cpu: 1
+ memory_gb: 4
+ disk_size_gb: 20
diff --git a/yolov7_seg/cls/utils/loggers/__init__.py b/yolov7_seg/cls/utils/loggers/__init__.py
new file mode 100644
index 000000000..73327c3e5
--- /dev/null
+++ b/yolov7_seg/cls/utils/loggers/__init__.py
@@ -0,0 +1,308 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Logging utils
+"""
+
+import os
+import warnings
+from pathlib import Path
+
+import pkg_resources as pkg
+import torch
+from torch.utils.tensorboard import SummaryWriter
+
+from utils.general import colorstr, cv2, emojis
+from utils.loggers.clearml.clearml_utils import ClearmlLogger
+from utils.loggers.wandb.wandb_utils import WandbLogger
+from utils.plots import plot_images, plot_results
+from utils.torch_utils import de_parallel
+
+LOGGERS = ('csv', 'tb', 'wandb', 'clearml') # *.csv, TensorBoard, Weights & Biases, ClearML
+RANK = int(os.getenv('RANK', -1))
+
+try:
+ import wandb
+
+ assert hasattr(wandb, '__version__') # verify package import not local dir
+ if pkg.parse_version(wandb.__version__) >= pkg.parse_version('0.12.2') and RANK in {0, -1}:
+ try:
+ wandb_login_success = wandb.login(timeout=30)
+ except wandb.errors.UsageError: # known non-TTY terminal issue
+ wandb_login_success = False
+ if not wandb_login_success:
+ wandb = None
+except (ImportError, AssertionError):
+ wandb = None
+
+try:
+ import clearml
+
+ assert hasattr(clearml, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ clearml = None
+
+
+class Loggers():
+ # YOLOv5 Loggers class
+ def __init__(self, save_dir=None, weights=None, opt=None, hyp=None, logger=None, include=LOGGERS):
+ self.save_dir = save_dir
+ self.weights = weights
+ self.opt = opt
+ self.hyp = hyp
+ self.logger = logger # for printing results to console
+ self.include = include
+ self.keys = [
+ 'train/box_loss',
+ 'train/obj_loss',
+ 'train/cls_loss', # train loss
+ 'metrics/precision',
+ 'metrics/recall',
+ 'metrics/mAP_0.5',
+ 'metrics/mAP_0.5:0.95', # metrics
+ 'val/box_loss',
+ 'val/obj_loss',
+ 'val/cls_loss', # val loss
+ 'x/lr0',
+ 'x/lr1',
+ 'x/lr2'] # params
+ self.best_keys = ['best/epoch', 'best/precision', 'best/recall', 'best/mAP_0.5', 'best/mAP_0.5:0.95']
+ for k in LOGGERS:
+ setattr(self, k, None) # init empty logger dictionary
+ self.csv = True # always log to csv
+
+ # Messages
+ if not wandb:
+ prefix = colorstr('Weights & Biases: ')
+ s = f"{prefix}run 'pip install wandb' to automatically track and visualize YOLOv5 🚀 runs in Weights & Biases"
+ self.logger.info(emojis(s))
+ if not clearml:
+ prefix = colorstr('ClearML: ')
+ s = f"{prefix}run 'pip install clearml' to automatically track, visualize and remotely train YOLOv5 🚀 runs in ClearML"
+ self.logger.info(emojis(s))
+
+ # TensorBoard
+ s = self.save_dir
+ if 'tb' in self.include and not self.opt.evolve:
+ prefix = colorstr('TensorBoard: ')
+ self.logger.info(f"{prefix}Start with 'tensorboard --logdir {s.parent}', view at http://localhost:6006/")
+ self.tb = SummaryWriter(str(s))
+
+ # W&B
+ if wandb and 'wandb' in self.include:
+ wandb_artifact_resume = isinstance(self.opt.resume, str) and self.opt.resume.startswith('wandb-artifact://')
+ run_id = torch.load(self.weights).get('wandb_id') if self.opt.resume and not wandb_artifact_resume else None
+ self.opt.hyp = self.hyp # add hyperparameters
+ self.wandb = WandbLogger(self.opt, run_id)
+ # temp warn. because nested artifacts not supported after 0.12.10
+ if pkg.parse_version(wandb.__version__) >= pkg.parse_version('0.12.11'):
+ s = "YOLOv5 temporarily requires wandb version 0.12.10 or below. Some features may not work as expected."
+ self.logger.warning(s)
+ else:
+ self.wandb = None
+
+ # ClearML
+ if clearml and 'clearml' in self.include:
+ self.clearml = ClearmlLogger(self.opt, self.hyp)
+ else:
+ self.clearml = None
+
+ def on_train_start(self):
+ # Callback runs on train start
+ pass
+
+ def on_pretrain_routine_end(self):
+ # Callback runs on pre-train routine end
+ paths = self.save_dir.glob('*labels*.jpg') # training labels
+ if self.wandb:
+ self.wandb.log({"Labels": [wandb.Image(str(x), caption=x.name) for x in paths]})
+ if self.clearml:
+ pass # ClearML saves these images automatically using hooks
+
+ def on_train_batch_end(self, ni, model, imgs, targets, paths, plots):
+ # Callback runs on train batch end
+ # ni: number integrated batches (since train start)
+ if plots:
+ if ni == 0 and not self.opt.sync_bn and self.tb:
+ log_tensorboard_graph(self.tb, model, imgsz=list(imgs.shape[2:4]))
+ if ni < 3:
+ f = self.save_dir / f'train_batch{ni}.jpg' # filename
+ plot_images(imgs, targets, paths, f)
+ if (self.wandb or self.clearml) and ni == 10:
+ files = sorted(self.save_dir.glob('train*.jpg'))
+ if self.wandb:
+ self.wandb.log({'Mosaics': [wandb.Image(str(f), caption=f.name) for f in files if f.exists()]})
+ if self.clearml:
+ self.clearml.log_debug_samples(files, title='Mosaics')
+
+ def on_train_epoch_end(self, epoch):
+ # Callback runs on train epoch end
+ if self.wandb:
+ self.wandb.current_epoch = epoch + 1
+
+ def on_val_image_end(self, pred, predn, path, names, im):
+ # Callback runs on val image end
+ if self.wandb:
+ self.wandb.val_one_image(pred, predn, path, names, im)
+ if self.clearml:
+ self.clearml.log_image_with_boxes(path, pred, names, im)
+
+ def on_val_end(self):
+ # Callback runs on val end
+ if self.wandb or self.clearml:
+ files = sorted(self.save_dir.glob('val*.jpg'))
+ if self.wandb:
+ self.wandb.log({"Validation": [wandb.Image(str(f), caption=f.name) for f in files]})
+ if self.clearml:
+ self.clearml.log_debug_samples(files, title='Validation')
+
+ def on_fit_epoch_end(self, vals, epoch, best_fitness, fi):
+ # Callback runs at the end of each fit (train+val) epoch
+ x = dict(zip(self.keys, vals))
+ if self.csv:
+ file = self.save_dir / 'results.csv'
+ n = len(x) + 1 # number of cols
+ s = '' if file.exists() else (('%20s,' * n % tuple(['epoch'] + self.keys)).rstrip(',') + '\n') # add header
+ with open(file, 'a') as f:
+ f.write(s + ('%20.5g,' * n % tuple([epoch] + vals)).rstrip(',') + '\n')
+
+ if self.tb:
+ for k, v in x.items():
+ self.tb.add_scalar(k, v, epoch)
+ elif self.clearml: # log to ClearML if TensorBoard not used
+ for k, v in x.items():
+ title, series = k.split('/')
+ self.clearml.task.get_logger().report_scalar(title, series, v, epoch)
+
+ if self.wandb:
+ if best_fitness == fi:
+ best_results = [epoch] + vals[3:7]
+ for i, name in enumerate(self.best_keys):
+ self.wandb.wandb_run.summary[name] = best_results[i] # log best results in the summary
+ self.wandb.log(x)
+ self.wandb.end_epoch(best_result=best_fitness == fi)
+
+ if self.clearml:
+ self.clearml.current_epoch_logged_images = set() # reset epoch image limit
+ self.clearml.current_epoch += 1
+
+ def on_model_save(self, last, epoch, final_epoch, best_fitness, fi):
+ # Callback runs on model save event
+ if self.wandb:
+ if ((epoch + 1) % self.opt.save_period == 0 and not final_epoch) and self.opt.save_period != -1:
+ self.wandb.log_model(last.parent, self.opt, epoch, fi, best_model=best_fitness == fi)
+
+ if self.clearml:
+ if ((epoch + 1) % self.opt.save_period == 0 and not final_epoch) and self.opt.save_period != -1:
+ self.clearml.task.update_output_model(model_path=str(last),
+ model_name='Latest Model',
+ auto_delete_file=False)
+
+ def on_train_end(self, last, best, plots, epoch, results):
+ # Callback runs on training end
+ if plots:
+ plot_results(file=self.save_dir / 'results.csv') # save results.png
+ files = ['results.png', 'confusion_matrix.png', *(f'{x}_curve.png' for x in ('F1', 'PR', 'P', 'R'))]
+ files = [(self.save_dir / f) for f in files if (self.save_dir / f).exists()] # filter
+ self.logger.info(f"Results saved to {colorstr('bold', self.save_dir)}")
+
+ if self.tb and not self.clearml: # These images are already captured by ClearML by now, we don't want doubles
+ for f in files:
+ self.tb.add_image(f.stem, cv2.imread(str(f))[..., ::-1], epoch, dataformats='HWC')
+
+ if self.wandb:
+ self.wandb.log(dict(zip(self.keys[3:10], results)))
+ self.wandb.log({"Results": [wandb.Image(str(f), caption=f.name) for f in files]})
+ # Calling wandb.log. TODO: Refactor this into WandbLogger.log_model
+ if not self.opt.evolve:
+ wandb.log_artifact(str(best if best.exists() else last),
+ type='model',
+ name=f'run_{self.wandb.wandb_run.id}_model',
+ aliases=['latest', 'best', 'stripped'])
+ self.wandb.finish_run()
+
+ if self.clearml:
+ # Save the best model here
+ if not self.opt.evolve:
+ self.clearml.task.update_output_model(model_path=str(best if best.exists() else last),
+ name='Best Model')
+
+ def on_params_update(self, params):
+ # Update hyperparams or configs of the experiment
+ # params: A dict containing {param: value} pairs
+ if self.wandb:
+ self.wandb.wandb_run.config.update(params, allow_val_change=True)
+
+
+class GenericLogger:
+ """
+ YOLOv5 General purpose logger for non-task specific logging
+ Usage: from utils.loggers import GenericLogger; logger = GenericLogger(...)
+ Arguments
+ opt: Run arguments
+ console_logger: Console logger
+ include: loggers to include
+ """
+
+ def __init__(self, opt, console_logger, include=('tb', 'wandb')):
+ # init default loggers
+ self.save_dir = opt.save_dir
+ self.include = include
+ self.console_logger = console_logger
+ if 'tb' in self.include:
+ prefix = colorstr('TensorBoard: ')
+ self.console_logger.info(
+ f"{prefix}Start with 'tensorboard --logdir {self.save_dir.parent}', view at http://localhost:6006/")
+ self.tb = SummaryWriter(str(self.save_dir))
+
+ if wandb and 'wandb' in self.include:
+ self.wandb = wandb.init(project="YOLOv5-Classifier" if opt.project == "runs/train" else opt.project,
+ name=None if opt.name == "exp" else opt.name,
+ config=opt)
+ else:
+ self.wandb = None
+
+ def log_metrics(self, metrics_dict, epoch):
+ # Log metrics dictionary to all loggers
+ if self.tb:
+ for k, v in metrics_dict.items():
+ self.tb.add_scalar(k, v, epoch)
+
+ if self.wandb:
+ self.wandb.log(metrics_dict, step=epoch)
+
+ def log_images(self, files, name='Images', epoch=0):
+ # Log images to all loggers
+ files = [Path(f) for f in (files if isinstance(files, (tuple, list)) else [files])] # to Path
+ files = [f for f in files if f.exists()] # filter by exists
+
+ if self.tb:
+ for f in files:
+ self.tb.add_image(f.stem, cv2.imread(str(f))[..., ::-1], epoch, dataformats='HWC')
+
+ if self.wandb:
+ self.wandb.log({name: [wandb.Image(str(f), caption=f.name) for f in files]}, step=epoch)
+
+ def log_graph(self, model, imgsz=(640, 640)):
+ # Log model graph to all loggers
+ if self.tb:
+ log_tensorboard_graph(self.tb, model, imgsz)
+
+ def log_model(self, model_path, epoch=0, metadata={}):
+ # Log model to all loggers
+ if self.wandb:
+ art = wandb.Artifact(name=f"run_{wandb.run.id}_model", type="model", metadata=metadata)
+ art.add_file(str(model_path))
+ wandb.log_artifact(art)
+
+
+def log_tensorboard_graph(tb, model, imgsz=(640, 640)):
+ # Log model graph to TensorBoard
+ try:
+ p = next(model.parameters()) # for device, type
+ imgsz = (imgsz, imgsz) if isinstance(imgsz, int) else imgsz # expand
+ im = torch.zeros((1, 3, *imgsz)).to(p.device).type_as(p) # input image
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress jit trace warning
+ tb.add_graph(torch.jit.trace(de_parallel(model), im, strict=False), [])
+ except Exception:
+ print('WARNING: TensorBoard graph visualization failure')
diff --git a/yolov7_seg/cls/utils/loggers/clearml/README.md b/yolov7_seg/cls/utils/loggers/clearml/README.md
new file mode 100644
index 000000000..5eccb08b9
--- /dev/null
+++ b/yolov7_seg/cls/utils/loggers/clearml/README.md
@@ -0,0 +1,222 @@
+# ClearML Integration
+
+
+
+## About ClearML
+
+[ClearML](https://cutt.ly/yolov5-tutorial-clearml) is an [open-source](https://github.com/allegroai/clearml) toolbox designed to save you time ⏱️.
+
+🔨 Track every YOLOv5 training run in the experiment manager
+
+🔧 Version and easily access your custom training data with the integrated ClearML Data Versioning Tool
+
+🔦 Remotely train and monitor your YOLOv5 training runs using ClearML Agent
+
+🔬 Get the very best mAP using ClearML Hyperparameter Optimization
+
+🔭 Turn your newly trained YOLOv5 model into an API with just a few commands using ClearML Serving
+
+
+
+## Status
+
+
+
+If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.
diff --git a/ipex/seg/utils/loggers/wandb/__init__.py b/ipex/seg/utils/loggers/wandb/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/ipex/seg/utils/loggers/wandb/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/ipex/seg/utils/loggers/wandb/log_dataset.py b/ipex/seg/utils/loggers/wandb/log_dataset.py
new file mode 100644
index 000000000..06e81fb69
--- /dev/null
+++ b/ipex/seg/utils/loggers/wandb/log_dataset.py
@@ -0,0 +1,27 @@
+import argparse
+
+from wandb_utils import WandbLogger
+
+from utils.general import LOGGER
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ logger = WandbLogger(opt, None, job_type='Dataset Creation') # TODO: return value unused
+ if not logger.wandb:
+ LOGGER.info("install wandb using `pip install wandb` to log the dataset")
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOv5', help='name of W&B Project')
+ parser.add_argument('--entity', default=None, help='W&B entity')
+ parser.add_argument('--name', type=str, default='log dataset', help='name of W&B run')
+
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/ipex/seg/utils/loggers/wandb/sweep.py b/ipex/seg/utils/loggers/wandb/sweep.py
new file mode 100644
index 000000000..d49ea6f27
--- /dev/null
+++ b/ipex/seg/utils/loggers/wandb/sweep.py
@@ -0,0 +1,41 @@
+import sys
+from pathlib import Path
+
+import wandb
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from train import parse_opt, train
+from utils.callbacks import Callbacks
+from utils.general import increment_path
+from utils.torch_utils import select_device
+
+
+def sweep():
+ wandb.init()
+ # Get hyp dict from sweep agent. Copy because train() modifies parameters which confused wandb.
+ hyp_dict = vars(wandb.config).get("_items").copy()
+
+ # Workaround: get necessary opt args
+ opt = parse_opt(known=True)
+ opt.batch_size = hyp_dict.get("batch_size")
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
+ opt.epochs = hyp_dict.get("epochs")
+ opt.nosave = True
+ opt.data = hyp_dict.get("data")
+ opt.weights = str(opt.weights)
+ opt.cfg = str(opt.cfg)
+ opt.data = str(opt.data)
+ opt.hyp = str(opt.hyp)
+ opt.project = str(opt.project)
+ device = select_device(opt.device, batch_size=opt.batch_size)
+
+ # train
+ train(hyp_dict, opt, device, callbacks=Callbacks())
+
+
+if __name__ == "__main__":
+ sweep()
diff --git a/ipex/seg/utils/loggers/wandb/sweep.yaml b/ipex/seg/utils/loggers/wandb/sweep.yaml
new file mode 100644
index 000000000..688b1ea02
--- /dev/null
+++ b/ipex/seg/utils/loggers/wandb/sweep.yaml
@@ -0,0 +1,143 @@
+# Hyperparameters for training
+# To set range-
+# Provide min and max values as:
+# parameter:
+#
+# min: scalar
+# max: scalar
+# OR
+#
+# Set a specific list of search space-
+# parameter:
+# values: [scalar1, scalar2, scalar3...]
+#
+# You can use grid, bayesian and hyperopt search strategy
+# For more info on configuring sweeps visit - https://docs.wandb.ai/guides/sweeps/configuration
+
+program: utils/loggers/wandb/sweep.py
+method: random
+metric:
+ name: metrics/mAP_0.5
+ goal: maximize
+
+parameters:
+ # hyperparameters: set either min, max range or values list
+ data:
+ value: "data/coco128.yaml"
+ batch_size:
+ values: [64]
+ epochs:
+ values: [10]
+
+ lr0:
+ distribution: uniform
+ min: 1e-5
+ max: 1e-1
+ lrf:
+ distribution: uniform
+ min: 0.01
+ max: 1.0
+ momentum:
+ distribution: uniform
+ min: 0.6
+ max: 0.98
+ weight_decay:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ warmup_epochs:
+ distribution: uniform
+ min: 0.0
+ max: 5.0
+ warmup_momentum:
+ distribution: uniform
+ min: 0.0
+ max: 0.95
+ warmup_bias_lr:
+ distribution: uniform
+ min: 0.0
+ max: 0.2
+ box:
+ distribution: uniform
+ min: 0.02
+ max: 0.2
+ cls:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ cls_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ obj:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ obj_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ iou_t:
+ distribution: uniform
+ min: 0.1
+ max: 0.7
+ anchor_t:
+ distribution: uniform
+ min: 2.0
+ max: 8.0
+ fl_gamma:
+ distribution: uniform
+ min: 0.0
+ max: 4.0
+ hsv_h:
+ distribution: uniform
+ min: 0.0
+ max: 0.1
+ hsv_s:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ hsv_v:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ degrees:
+ distribution: uniform
+ min: 0.0
+ max: 45.0
+ translate:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ scale:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ shear:
+ distribution: uniform
+ min: 0.0
+ max: 10.0
+ perspective:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ flipud:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ fliplr:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mosaic:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mixup:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ copy_paste:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
diff --git a/ipex/seg/utils/loggers/wandb/wandb_utils.py b/ipex/seg/utils/loggers/wandb/wandb_utils.py
new file mode 100644
index 000000000..e850d2ac8
--- /dev/null
+++ b/ipex/seg/utils/loggers/wandb/wandb_utils.py
@@ -0,0 +1,584 @@
+"""Utilities and tools for tracking runs with Weights & Biases."""
+
+import logging
+import os
+import sys
+from contextlib import contextmanager
+from pathlib import Path
+from typing import Dict
+
+import yaml
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from utils.dataloaders import LoadImagesAndLabels, img2label_paths
+from utils.general import LOGGER, check_dataset, check_file
+
+try:
+ import wandb
+
+ assert hasattr(wandb, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ wandb = None
+
+RANK = int(os.getenv('RANK', -1))
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):
+ return from_string[len(prefix):]
+
+
+def check_wandb_config_file(data_config_file):
+ wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path
+ if Path(wandb_config).is_file():
+ return wandb_config
+ return data_config_file
+
+
+def check_wandb_dataset(data_file):
+ is_trainset_wandb_artifact = False
+ is_valset_wandb_artifact = False
+ if isinstance(data_file, dict):
+ # In that case another dataset manager has already processed it and we don't have to
+ return data_file
+ if check_file(data_file) and data_file.endswith('.yaml'):
+ with open(data_file, errors='ignore') as f:
+ data_dict = yaml.safe_load(f)
+ is_trainset_wandb_artifact = isinstance(data_dict['train'],
+ str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX)
+ is_valset_wandb_artifact = isinstance(data_dict['val'],
+ str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX)
+ if is_trainset_wandb_artifact or is_valset_wandb_artifact:
+ return data_dict
+ else:
+ return check_dataset(data_file)
+
+
+def get_run_info(run_path):
+ run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))
+ run_id = run_path.stem
+ project = run_path.parent.stem
+ entity = run_path.parent.parent.stem
+ model_artifact_name = 'run_' + run_id + '_model'
+ return entity, project, run_id, model_artifact_name
+
+
+def check_wandb_resume(opt):
+ process_wandb_config_ddp_mode(opt) if RANK not in [-1, 0] else None
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ if RANK not in [-1, 0]: # For resuming DDP runs
+ entity, project, run_id, model_artifact_name = get_run_info(opt.resume)
+ api = wandb.Api()
+ artifact = api.artifact(entity + '/' + project + '/' + model_artifact_name + ':latest')
+ modeldir = artifact.download()
+ opt.weights = str(Path(modeldir) / "last.pt")
+ return True
+ return None
+
+
+def process_wandb_config_ddp_mode(opt):
+ with open(check_file(opt.data), errors='ignore') as f:
+ data_dict = yaml.safe_load(f) # data dict
+ train_dir, val_dir = None, None
+ if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)
+ train_dir = train_artifact.download()
+ train_path = Path(train_dir) / 'data/images/'
+ data_dict['train'] = str(train_path)
+
+ if isinstance(data_dict['val'], str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ val_artifact = api.artifact(remove_prefix(data_dict['val']) + ':' + opt.artifact_alias)
+ val_dir = val_artifact.download()
+ val_path = Path(val_dir) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ if train_dir or val_dir:
+ ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')
+ with open(ddp_data_path, 'w') as f:
+ yaml.safe_dump(data_dict, f)
+ opt.data = ddp_data_path
+
+
+class WandbLogger():
+ """Log training runs, datasets, models, and predictions to Weights & Biases.
+
+ This logger sends information to W&B at wandb.ai. By default, this information
+ includes hyperparameters, system configuration and metrics, model metrics,
+ and basic data metrics and analyses.
+
+ By providing additional command line arguments to train.py, datasets,
+ models and predictions can also be logged.
+
+ For more on how this logger is used, see the Weights & Biases documentation:
+ https://docs.wandb.com/guides/integrations/yolov5
+ """
+
+ def __init__(self, opt, run_id=None, job_type='Training'):
+ """
+ - Initialize WandbLogger instance
+ - Upload dataset if opt.upload_dataset is True
+ - Setup training processes if job_type is 'Training'
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ run_id (str) -- Run ID of W&B run to be resumed
+ job_type (str) -- To set the job_type for this run
+
+ """
+ # Pre-training routine --
+ self.job_type = job_type
+ self.wandb, self.wandb_run = wandb, None if not wandb else wandb.run
+ self.val_artifact, self.train_artifact = None, None
+ self.train_artifact_path, self.val_artifact_path = None, None
+ self.result_artifact = None
+ self.val_table, self.result_table = None, None
+ self.bbox_media_panel_images = []
+ self.val_table_path_map = None
+ self.max_imgs_to_log = 16
+ self.wandb_artifact_data_dict = None
+ self.data_dict = None
+ # It's more elegant to stick to 1 wandb.init call,
+ # but useful config data is overwritten in the WandbLogger's wandb.init call
+ if isinstance(opt.resume, str): # checks resume from artifact
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ entity, project, run_id, model_artifact_name = get_run_info(opt.resume)
+ model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name
+ assert wandb, 'install wandb to resume wandb runs'
+ # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config
+ self.wandb_run = wandb.init(id=run_id,
+ project=project,
+ entity=entity,
+ resume='allow',
+ allow_val_change=True)
+ opt.resume = model_artifact_name
+ elif self.wandb:
+ self.wandb_run = wandb.init(config=opt,
+ resume="allow",
+ project='YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem,
+ entity=opt.entity,
+ name=opt.name if opt.name != 'exp' else None,
+ job_type=job_type,
+ id=run_id,
+ allow_val_change=True) if not wandb.run else wandb.run
+ if self.wandb_run:
+ if self.job_type == 'Training':
+ if opt.upload_dataset:
+ if not opt.resume:
+ self.wandb_artifact_data_dict = self.check_and_upload_dataset(opt)
+
+ if isinstance(opt.data, dict):
+ # This means another dataset manager has already processed the dataset info (e.g. ClearML)
+ # and they will have stored the already processed dict in opt.data
+ self.data_dict = opt.data
+ elif opt.resume:
+ # resume from artifact
+ if isinstance(opt.resume, str) and opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ self.data_dict = dict(self.wandb_run.config.data_dict)
+ else: # local resume
+ self.data_dict = check_wandb_dataset(opt.data)
+ else:
+ self.data_dict = check_wandb_dataset(opt.data)
+ self.wandb_artifact_data_dict = self.wandb_artifact_data_dict or self.data_dict
+
+ # write data_dict to config. useful for resuming from artifacts. Do this only when not resuming.
+ self.wandb_run.config.update({'data_dict': self.wandb_artifact_data_dict}, allow_val_change=True)
+ self.setup_training(opt)
+
+ if self.job_type == 'Dataset Creation':
+ self.wandb_run.config.update({"upload_dataset": True})
+ self.data_dict = self.check_and_upload_dataset(opt)
+
+ def check_and_upload_dataset(self, opt):
+ """
+ Check if the dataset format is compatible and upload it as W&B artifact
+
+ arguments:
+ opt (namespace)-- Commandline arguments for current run
+
+ returns:
+ Updated dataset info dictionary where local dataset paths are replaced by WAND_ARFACT_PREFIX links.
+ """
+ assert wandb, 'Install wandb to upload dataset'
+ config_path = self.log_dataset_artifact(opt.data, opt.single_cls,
+ 'YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem)
+ with open(config_path, errors='ignore') as f:
+ wandb_data_dict = yaml.safe_load(f)
+ return wandb_data_dict
+
+ def setup_training(self, opt):
+ """
+ Setup the necessary processes for training YOLO models:
+ - Attempt to download model checkpoint and dataset artifacts if opt.resume stats with WANDB_ARTIFACT_PREFIX
+ - Update data_dict, to contain info of previous run if resumed and the paths of dataset artifact if downloaded
+ - Setup log_dict, initialize bbox_interval
+
+ arguments:
+ opt (namespace) -- commandline arguments for this run
+
+ """
+ self.log_dict, self.current_epoch = {}, 0
+ self.bbox_interval = opt.bbox_interval
+ if isinstance(opt.resume, str):
+ modeldir, _ = self.download_model_artifact(opt)
+ if modeldir:
+ self.weights = Path(modeldir) / "last.pt"
+ config = self.wandb_run.config
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp, opt.imgsz = str(
+ self.weights), config.save_period, config.batch_size, config.bbox_interval, config.epochs,\
+ config.hyp, config.imgsz
+ data_dict = self.data_dict
+ if self.val_artifact is None: # If --upload_dataset is set, use the existing artifact, don't download
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(
+ data_dict.get('train'), opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(
+ data_dict.get('val'), opt.artifact_alias)
+
+ if self.train_artifact_path is not None:
+ train_path = Path(self.train_artifact_path) / 'data/images/'
+ data_dict['train'] = str(train_path)
+ if self.val_artifact_path is not None:
+ val_path = Path(self.val_artifact_path) / 'data/images/'
+ data_dict['val'] = str(val_path)
+
+ if self.val_artifact is not None:
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+ columns = ["epoch", "id", "ground truth", "prediction"]
+ columns.extend(self.data_dict['names'])
+ self.result_table = wandb.Table(columns)
+ self.val_table = self.val_artifact.get("val")
+ if self.val_table_path_map is None:
+ self.map_val_table_path()
+ if opt.bbox_interval == -1:
+ self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ if opt.evolve or opt.noplots:
+ self.bbox_interval = opt.bbox_interval = opt.epochs + 1 # disable bbox_interval
+ train_from_artifact = self.train_artifact_path is not None and self.val_artifact_path is not None
+ # Update the the data_dict to point to local artifacts dir
+ if train_from_artifact:
+ self.data_dict = data_dict
+
+ def download_dataset_artifact(self, path, alias):
+ """
+ download the model checkpoint artifact if the path starts with WANDB_ARTIFACT_PREFIX
+
+ arguments:
+ path -- path of the dataset to be used for training
+ alias (str)-- alias of the artifact to be download/used for training
+
+ returns:
+ (str, wandb.Artifact) -- path of the downladed dataset and it's corresponding artifact object if dataset
+ is found otherwise returns (None, None)
+ """
+ if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):
+ artifact_path = Path(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + ":" + alias)
+ dataset_artifact = wandb.use_artifact(artifact_path.as_posix().replace("\\", "/"))
+ assert dataset_artifact is not None, "'Error: W&B dataset artifact doesn\'t exist'"
+ datadir = dataset_artifact.download()
+ return datadir, dataset_artifact
+ return None, None
+
+ def download_model_artifact(self, opt):
+ """
+ download the model checkpoint artifact if the resume path starts with WANDB_ARTIFACT_PREFIX
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ """
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
+ assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
+ modeldir = model_artifact.download()
+ # epochs_trained = model_artifact.metadata.get('epochs_trained')
+ total_epochs = model_artifact.metadata.get('total_epochs')
+ is_finished = total_epochs is None
+ assert not is_finished, 'training is finished, can only resume incomplete runs.'
+ return modeldir, model_artifact
+ return None, None
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ """
+ Log the model checkpoint as W&B artifact
+
+ arguments:
+ path (Path) -- Path of directory containing the checkpoints
+ opt (namespace) -- Command line arguments for this run
+ epoch (int) -- Current epoch number
+ fitness_score (float) -- fitness score for current epoch
+ best_model (boolean) -- Boolean representing if the current checkpoint is the best yet.
+ """
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model',
+ type='model',
+ metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score})
+ model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
+ wandb.log_artifact(model_artifact,
+ aliases=['latest', 'last', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
+ LOGGER.info(f"Saving model artifact on epoch {epoch + 1}")
+
+ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):
+ """
+ Log the dataset as W&B artifact and return the new data file with W&B links
+
+ arguments:
+ data_file (str) -- the .yaml file with information about the dataset like - path, classes etc.
+ single_class (boolean) -- train multi-class data as single-class
+ project (str) -- project name. Used to construct the artifact path
+ overwrite_config (boolean) -- overwrites the data.yaml file if set to true otherwise creates a new
+ file with _wandb postfix. Eg -> data_wandb.yaml
+
+ returns:
+ the new .yaml file with artifact links. it can be used to start training directly from artifacts
+ """
+ upload_dataset = self.wandb_run.config.upload_dataset
+ log_val_only = isinstance(upload_dataset, str) and upload_dataset == 'val'
+ self.data_dict = check_dataset(data_file) # parse and check
+ data = dict(self.data_dict)
+ nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])
+ names = {k: v for k, v in enumerate(names)} # to index dictionary
+
+ # log train set
+ if not log_val_only:
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(data['train'], rect=True, batch_size=1),
+ names,
+ name='train') if data.get('train') else None
+ if data.get('train'):
+ data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
+
+ self.val_artifact = self.create_dataset_table(
+ LoadImagesAndLabels(data['val'], rect=True, batch_size=1), names, name='val') if data.get('val') else None
+ if data.get('val'):
+ data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
+
+ path = Path(data_file)
+ # create a _wandb.yaml file with artifacts links if both train and test set are logged
+ if not log_val_only:
+ path = (path.stem if overwrite_config else path.stem + '_wandb') + '.yaml' # updated data.yaml path
+ path = ROOT / 'data' / path
+ data.pop('download', None)
+ data.pop('path', None)
+ with open(path, 'w') as f:
+ yaml.safe_dump(data, f)
+ LOGGER.info(f"Created dataset config file {path}")
+
+ if self.job_type == 'Training': # builds correct artifact pipeline graph
+ if not log_val_only:
+ self.wandb_run.log_artifact(
+ self.train_artifact) # calling use_artifact downloads the dataset. NOT NEEDED!
+ self.wandb_run.use_artifact(self.val_artifact)
+ self.val_artifact.wait()
+ self.val_table = self.val_artifact.get('val')
+ self.map_val_table_path()
+ else:
+ self.wandb_run.log_artifact(self.train_artifact)
+ self.wandb_run.log_artifact(self.val_artifact)
+ return path
+
+ def map_val_table_path(self):
+ """
+ Map the validation dataset Table like name of file -> it's id in the W&B Table.
+ Useful for - referencing artifacts for evaluation.
+ """
+ self.val_table_path_map = {}
+ LOGGER.info("Mapping dataset")
+ for i, data in enumerate(tqdm(self.val_table.data)):
+ self.val_table_path_map[data[3]] = data[0]
+
+ def create_dataset_table(self, dataset: LoadImagesAndLabels, class_to_id: Dict[int, str], name: str = 'dataset'):
+ """
+ Create and return W&B artifact containing W&B Table of the dataset.
+
+ arguments:
+ dataset -- instance of LoadImagesAndLabels class used to iterate over the data to build Table
+ class_to_id -- hash map that maps class ids to labels
+ name -- name of the artifact
+
+ returns:
+ dataset artifact to be logged or used
+ """
+ # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
+ artifact = wandb.Artifact(name=name, type="dataset")
+ img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
+ img_files = tqdm(dataset.im_files) if not img_files else img_files
+ for img_file in img_files:
+ if Path(img_file).is_dir():
+ artifact.add_dir(img_file, name='data/images')
+ labels_path = 'labels'.join(dataset.path.rsplit('images', 1))
+ artifact.add_dir(labels_path, name='data/labels')
+ else:
+ artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
+ label_file = Path(img2label_paths([img_file])[0])
+ artifact.add_file(str(label_file), name='data/labels/' +
+ label_file.name) if label_file.exists() else None
+ table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
+ for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
+ box_data, img_classes = [], {}
+ for cls, *xywh in labels[:, 1:].tolist():
+ cls = int(cls)
+ box_data.append({
+ "position": {
+ "middle": [xywh[0], xywh[1]],
+ "width": xywh[2],
+ "height": xywh[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls])})
+ img_classes[cls] = class_to_id[cls]
+ boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
+ table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), list(img_classes.values()),
+ Path(paths).name)
+ artifact.add(table, name)
+ return artifact
+
+ def log_training_progress(self, predn, path, names):
+ """
+ Build evaluation Table. Uses reference from validation dataset table.
+
+ arguments:
+ predn (list): list of predictions in the native space in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ path (str): local path of the current evaluation image
+ names (dict(int, str)): hash map that maps class ids to labels
+ """
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])
+ box_data = []
+ avg_conf_per_class = [0] * len(self.data_dict['names'])
+ pred_class_count = {}
+ for *xyxy, conf, cls in predn.tolist():
+ if conf >= 0.25:
+ cls = int(cls)
+ box_data.append({
+ "position": {
+ "minX": xyxy[0],
+ "minY": xyxy[1],
+ "maxX": xyxy[2],
+ "maxY": xyxy[3]},
+ "class_id": cls,
+ "box_caption": f"{names[cls]} {conf:.3f}",
+ "scores": {
+ "class_score": conf},
+ "domain": "pixel"})
+ avg_conf_per_class[cls] += conf
+
+ if cls in pred_class_count:
+ pred_class_count[cls] += 1
+ else:
+ pred_class_count[cls] = 1
+
+ for pred_class in pred_class_count.keys():
+ avg_conf_per_class[pred_class] = avg_conf_per_class[pred_class] / pred_class_count[pred_class]
+
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ id = self.val_table_path_map[Path(path).name]
+ self.result_table.add_data(self.current_epoch, id, self.val_table.data[id][1],
+ wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
+ *avg_conf_per_class)
+
+ def val_one_image(self, pred, predn, path, names, im):
+ """
+ Log validation data for one image. updates the result Table if validation dataset is uploaded and log bbox media panel
+
+ arguments:
+ pred (list): list of scaled predictions in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ predn (list): list of predictions in the native space - [xmin, ymin, xmax, ymax, confidence, class]
+ path (str): local path of the current evaluation image
+ """
+ if self.val_table and self.result_table: # Log Table if Val dataset is uploaded as artifact
+ self.log_training_progress(predn, path, names)
+
+ if len(self.bbox_media_panel_images) < self.max_imgs_to_log and self.current_epoch > 0:
+ if self.current_epoch % self.bbox_interval == 0:
+ box_data = [{
+ "position": {
+ "minX": xyxy[0],
+ "minY": xyxy[1],
+ "maxX": xyxy[2],
+ "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": f"{names[int(cls)]} {conf:.3f}",
+ "scores": {
+ "class_score": conf},
+ "domain": "pixel"} for *xyxy, conf, cls in pred.tolist()]
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ self.bbox_media_panel_images.append(wandb.Image(im, boxes=boxes, caption=path.name))
+
+ def log(self, log_dict):
+ """
+ save the metrics to the logging dictionary
+
+ arguments:
+ log_dict (Dict) -- metrics/media to be logged in current step
+ """
+ if self.wandb_run:
+ for key, value in log_dict.items():
+ self.log_dict[key] = value
+
+ def end_epoch(self, best_result=False):
+ """
+ commit the log_dict, model artifacts and Tables to W&B and flush the log_dict.
+
+ arguments:
+ best_result (boolean): Boolean representing if the result of this evaluation is best or not
+ """
+ if self.wandb_run:
+ with all_logging_disabled():
+ if self.bbox_media_panel_images:
+ self.log_dict["BoundingBoxDebugger"] = self.bbox_media_panel_images
+ try:
+ wandb.log(self.log_dict)
+ except BaseException as e:
+ LOGGER.info(
+ f"An error occurred in wandb logger. The training will proceed without interruption. More info\n{e}"
+ )
+ self.wandb_run.finish()
+ self.wandb_run = None
+
+ self.log_dict = {}
+ self.bbox_media_panel_images = []
+ if self.result_artifact:
+ self.result_artifact.add(self.result_table, 'result')
+ wandb.log_artifact(self.result_artifact,
+ aliases=[
+ 'latest', 'last', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
+
+ wandb.log({"evaluation": self.result_table})
+ columns = ["epoch", "id", "ground truth", "prediction"]
+ columns.extend(self.data_dict['names'])
+ self.result_table = wandb.Table(columns)
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+
+ def finish_run(self):
+ """
+ Log metrics if any and finish the current W&B run
+ """
+ if self.wandb_run:
+ if self.log_dict:
+ with all_logging_disabled():
+ wandb.log(self.log_dict)
+ wandb.run.finish()
+
+
+@contextmanager
+def all_logging_disabled(highest_level=logging.CRITICAL):
+ """ source - https://gist.github.com/simon-weber/7853144
+ A context manager that will prevent any logging messages triggered during the body from being processed.
+ :param highest_level: the maximum logging level in use.
+ This would only need to be changed if a custom level greater than CRITICAL is defined.
+ """
+ previous_level = logging.root.manager.disable
+ logging.disable(highest_level)
+ try:
+ yield
+ finally:
+ logging.disable(previous_level)
diff --git a/ipex/seg/utils/loss.py b/ipex/seg/utils/loss.py
new file mode 100644
index 000000000..9b9c3d9f8
--- /dev/null
+++ b/ipex/seg/utils/loss.py
@@ -0,0 +1,234 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Loss functions
+"""
+
+import torch
+import torch.nn as nn
+
+from utils.metrics import bbox_iou
+from utils.torch_utils import de_parallel
+
+
+def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
+ # return positive, negative label smoothing BCE targets
+ return 1.0 - 0.5 * eps, 0.5 * eps
+
+
+class BCEBlurWithLogitsLoss(nn.Module):
+ # BCEwithLogitLoss() with reduced missing label effects.
+ def __init__(self, alpha=0.05):
+ super().__init__()
+ self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
+ self.alpha = alpha
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ pred = torch.sigmoid(pred) # prob from logits
+ dx = pred - true # reduce only missing label effects
+ # dx = (pred - true).abs() # reduce missing label and false label effects
+ alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
+ loss *= alpha_factor
+ return loss.mean()
+
+
+class FocalLoss(nn.Module):
+ # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super().__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ # p_t = torch.exp(-loss)
+ # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
+
+ # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = (1.0 - p_t) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class QFocalLoss(nn.Module):
+ # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super().__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = torch.abs(true - pred_prob) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class ComputeLoss:
+ sort_obj_iou = False
+
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ m = de_parallel(model).model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
+ self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
+ self.na = m.na # number of anchors
+ self.nc = m.nc # number of classes
+ self.nl = m.nl # number of layers
+ self.anchors = m.anchors
+ self.device = device
+
+ def __call__(self, p, targets): # predictions, targets
+ lcls = torch.zeros(1, device=self.device) # class loss
+ lbox = torch.zeros(1, device=self.device) # box loss
+ lobj = torch.zeros(1, device=self.device) # object loss
+ tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ # pxy, pwh, _, pcls = pi[b, a, gj, gi].tensor_split((2, 4, 5), dim=1) # faster, requires torch 1.8.0
+ pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions
+
+ # Regression
+ pxy = pxy.sigmoid() * 2 - 0.5
+ pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ iou = iou.detach().clamp(0).type(tobj.dtype)
+ if self.sort_obj_iou:
+ j = iou.argsort()
+ b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
+ if self.gr < 1:
+ iou = (1.0 - self.gr) + self.gr * iou
+ tobj[b, a, gj, gi] = iou # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(pcls, self.cn, device=self.device) # targets
+ t[range(n), tcls[i]] = self.cp
+ lcls += self.BCEcls(pcls, t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch = [], [], [], []
+ gain = torch.ones(7, device=self.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor(
+ [
+ [0, 0],
+ [1, 0],
+ [0, 1],
+ [-1, 0],
+ [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ],
+ device=self.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors, shape = self.anchors[i], p[i].shape
+ gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain # shape(3,n,7)
+ if nt:
+ # Matches
+ r = t[..., 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1 < g) & (gxy > 1)).T
+ l, m = ((gxi % 1 < g) & (gxi > 1)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ bc, gxy, gwh, a = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
+ a, (b, c) = a.long().view(-1), bc.long().T # anchors, image, class
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid indices
+
+ # Append
+ indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+
+ return tcls, tbox, indices, anch
diff --git a/ipex/seg/utils/metrics.py b/ipex/seg/utils/metrics.py
new file mode 100644
index 000000000..7bd252167
--- /dev/null
+++ b/ipex/seg/utils/metrics.py
@@ -0,0 +1,367 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Model validation metrics
+"""
+
+import math
+import warnings
+from pathlib import Path
+
+import matplotlib.pyplot as plt
+import numpy as np
+import torch
+
+from utils import TryExcept, threaded
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
+ return (x[:, :4] * w).sum(1)
+
+
+def smooth(y, f=0.05):
+ # Box filter of fraction f
+ nf = round(len(y) * f * 2) // 2 + 1 # number of filter elements (must be odd)
+ p = np.ones(nf // 2) # ones padding
+ yp = np.concatenate((p * y[0], y, p * y[-1]), 0) # y padded
+ return np.convolve(yp, np.ones(nf) / nf, mode='valid') # y-smoothed
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16, prefix=""):
+ """ Compute the average precision, given the recall and precision curves.
+ Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
+ # Arguments
+ tp: True positives (nparray, nx1 or nx10).
+ conf: Objectness value from 0-1 (nparray).
+ pred_cls: Predicted object classes (nparray).
+ target_cls: True object classes (nparray).
+ plot: Plot precision-recall curve at mAP@0.5
+ save_dir: Plot save directory
+ # Returns
+ The average precision as computed in py-faster-rcnn.
+ """
+
+ # Sort by objectness
+ i = np.argsort(-conf)
+ tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
+
+ # Find unique classes
+ unique_classes, nt = np.unique(target_cls, return_counts=True)
+ nc = unique_classes.shape[0] # number of classes, number of detections
+
+ # Create Precision-Recall curve and compute AP for each class
+ px, py = np.linspace(0, 1, 1000), [] # for plotting
+ ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
+ for ci, c in enumerate(unique_classes):
+ i = pred_cls == c
+ n_l = nt[ci] # number of labels
+ n_p = i.sum() # number of predictions
+ if n_p == 0 or n_l == 0:
+ continue
+
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + eps) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+
+ # Compute F1 (harmonic mean of precision and recall)
+ f1 = 2 * p * r / (p + r + eps)
+ names = [v for k, v in names.items() if k in unique_classes] # list: only classes that have data
+ names = dict(enumerate(names)) # to dict
+ if plot:
+ plot_pr_curve(px, py, ap, Path(save_dir) / f'{prefix}PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / f'{prefix}F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / f'{prefix}P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / f'{prefix}R_curve.png', names, ylabel='Recall')
+
+ i = smooth(f1.mean(0), 0.1).argmax() # max F1 index
+ p, r, f1 = p[:, i], r[:, i], f1[:, i]
+ tp = (r * nt).round() # true positives
+ fp = (tp / (p + eps) - tp).round() # false positives
+ return tp, fp, p, r, f1, ap, unique_classes.astype(int)
+
+
+def compute_ap(recall, precision):
+ """ Compute the average precision, given the recall and precision curves
+ # Arguments
+ recall: The recall curve (list)
+ precision: The precision curve (list)
+ # Returns
+ Average precision, precision curve, recall curve
+ """
+
+ # Append sentinel values to beginning and end
+ mrec = np.concatenate(([0.0], recall, [1.0]))
+ mpre = np.concatenate(([1.0], precision, [0.0]))
+
+ # Compute the precision envelope
+ mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
+
+ # Integrate area under curve
+ method = 'interp' # methods: 'continuous', 'interp'
+ if method == 'interp':
+ x = np.linspace(0, 1, 101) # 101-point interp (COCO)
+ ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
+ else: # 'continuous'
+ i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
+ ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
+
+ return ap, mpre, mrec
+
+
+class ConfusionMatrix:
+ # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
+ def __init__(self, nc, conf=0.25, iou_thres=0.45):
+ self.matrix = np.zeros((nc + 1, nc + 1))
+ self.nc = nc # number of classes
+ self.conf = conf
+ self.iou_thres = iou_thres
+
+ def process_batch(self, detections, labels):
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ None, updates confusion matrix accordingly
+ """
+ if detections is None:
+ gt_classes = labels.int()
+ for gc in gt_classes:
+ self.matrix[self.nc, gc] += 1 # background FN
+ return
+
+ detections = detections[detections[:, 4] > self.conf]
+ gt_classes = labels[:, 0].int()
+ detection_classes = detections[:, 5].int()
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+
+ x = torch.where(iou > self.iou_thres)
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ else:
+ matches = np.zeros((0, 3))
+
+ n = matches.shape[0] > 0
+ m0, m1, _ = matches.transpose().astype(int)
+ for i, gc in enumerate(gt_classes):
+ j = m0 == i
+ if n and sum(j) == 1:
+ self.matrix[detection_classes[m1[j]], gc] += 1 # correct
+ else:
+ self.matrix[self.nc, gc] += 1 # background FP
+
+ if n:
+ for i, dc in enumerate(detection_classes):
+ if not any(m1 == i):
+ self.matrix[dc, self.nc] += 1 # background FN
+
+ def matrix(self):
+ return self.matrix
+
+ def tp_fp(self):
+ tp = self.matrix.diagonal() # true positives
+ fp = self.matrix.sum(1) - tp # false positives
+ # fn = self.matrix.sum(0) - tp # false negatives (missed detections)
+ return tp[:-1], fp[:-1] # remove background class
+
+ @TryExcept('WARNING: ConfusionMatrix plot failure')
+ def plot(self, normalize=True, save_dir='', names=()):
+ import seaborn as sn
+
+ array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-9) if normalize else 1) # normalize columns
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig, ax = plt.subplots(1, 1, figsize=(12, 9), tight_layout=True)
+ nc, nn = self.nc, len(names) # number of classes, names
+ sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size
+ labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
+ sn.heatmap(array,
+ ax=ax,
+ annot=nc < 30,
+ annot_kws={
+ "size": 8},
+ cmap='Blues',
+ fmt='.2f',
+ square=True,
+ vmin=0.0,
+ xticklabels=names + ['background FP'] if labels else "auto",
+ yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
+ ax.set_ylabel('True')
+ ax.set_ylabel('Predicted')
+ ax.set_title('Confusion Matrix')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ plt.close(fig)
+
+ def print(self):
+ for i in range(self.nc + 1):
+ print(' '.join(map(str, self.matrix[i])))
+
+
+def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)
+
+ # Get the coordinates of bounding boxes
+ if xywh: # transform from xywh to xyxy
+ (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, 1), box2.chunk(4, 1)
+ w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
+ b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
+ b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
+ else: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, 1)
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, 1)
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ # IoU
+ iou = inter / union
+ if CIoU or DIoU or GIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2
+ if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
+ with torch.no_grad():
+ alpha = v / (v - iou + (1 + eps))
+ return iou - (rho2 / c2 + v * alpha) # CIoU
+ return iou - rho2 / c2 # DIoU
+ c_area = cw * ch + eps # convex area
+ return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ return iou # IoU
+
+
+def box_area(box):
+ # box = xyxy(4,n)
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+
+def box_iou(box1, box2, eps=1e-7):
+ # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ box1 (Tensor[N, 4])
+ box2 (Tensor[M, 4])
+ Returns:
+ iou (Tensor[N, M]): the NxM matrix containing the pairwise
+ IoU values for every element in boxes1 and boxes2
+ """
+
+ # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
+ (a1, a2), (b1, b2) = box1[:, None].chunk(2, 2), box2.chunk(2, 1)
+ inter = (torch.min(a2, b2) - torch.max(a1, b1)).clamp(0).prod(2)
+
+ # IoU = inter / (area1 + area2 - inter)
+ return inter / (box_area(box1.T)[:, None] + box_area(box2.T) - inter + eps)
+
+
+def bbox_ioa(box1, box2, eps=1e-7):
+ """ Returns the intersection over box2 area given box1, box2. Boxes are x1y1x2y2
+ box1: np.array of shape(4)
+ box2: np.array of shape(nx4)
+ returns: np.array of shape(n)
+ """
+
+ # Get the coordinates of bounding boxes
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.T
+
+ # Intersection area
+ inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
+ (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)
+
+ # box2 area
+ box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + eps
+
+ # Intersection over box2 area
+ return inter_area / box2_area
+
+
+def wh_iou(wh1, wh2, eps=1e-7):
+ # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
+ wh1 = wh1[:, None] # [N,1,2]
+ wh2 = wh2[None] # [1,M,2]
+ inter = torch.min(wh1, wh2).prod(2) # [N,M]
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter + eps) # iou = inter / (area1 + area2 - inter)
+
+
+# Plots ----------------------------------------------------------------------------------------------------------------
+
+
+@threaded
+def plot_pr_curve(px, py, ap, save_dir=Path('pr_curve.png'), names=()):
+ # Precision-recall curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+ py = np.stack(py, axis=1)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py.T):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)
+ else:
+ ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)
+
+ ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())
+ ax.set_xlabel('Recall')
+ ax.set_ylabel('Precision')
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ ax.set_title('Precision-Recall Curve')
+ fig.savefig(save_dir, dpi=250)
+ plt.close(fig)
+
+
+@threaded
+def plot_mc_curve(px, py, save_dir=Path('mc_curve.png'), names=(), xlabel='Confidence', ylabel='Metric'):
+ # Metric-confidence curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)
+ else:
+ ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
+
+ y = smooth(py.mean(0), 0.05)
+ ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
+ ax.set_xlabel(xlabel)
+ ax.set_ylabel(ylabel)
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ ax.set_title(f'{ylabel}-Confidence Curve')
+ fig.savefig(save_dir, dpi=250)
+ plt.close(fig)
diff --git a/ipex/seg/utils/plots.py b/ipex/seg/utils/plots.py
new file mode 100644
index 000000000..dd1c072a8
--- /dev/null
+++ b/ipex/seg/utils/plots.py
@@ -0,0 +1,529 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Plotting utils
+"""
+
+import contextlib
+import math
+import os
+from copy import copy
+from pathlib import Path
+from urllib.error import URLError
+
+import cv2
+import matplotlib
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import seaborn as sn
+import torch
+from PIL import Image, ImageDraw, ImageFont
+
+from utils import TryExcept, threaded
+from utils.general import (CONFIG_DIR, FONT, LOGGER, check_font, check_requirements, clip_coords, increment_path,
+ is_ascii, xywh2xyxy, xyxy2xywh)
+from utils.metrics import fitness
+
+# Settings
+RANK = int(os.getenv('RANK', -1))
+matplotlib.rc('font', **{'size': 11})
+matplotlib.use('Agg') # for writing to files only
+
+
+class Colors:
+ # Ultralytics color palette https://ultralytics.com/
+ def __init__(self):
+ # hex = matplotlib.colors.TABLEAU_COLORS.values()
+ hexs = ('FF3838', 'FF9D97', 'FF701F', 'FFB21D', 'CFD231', '48F90A', '92CC17', '3DDB86', '1A9334', '00D4BB',
+ '2C99A8', '00C2FF', '344593', '6473FF', '0018EC', '8438FF', '520085', 'CB38FF', 'FF95C8', 'FF37C7')
+ self.palette = [self.hex2rgb(f'#{c}') for c in hexs]
+ self.n = len(self.palette)
+
+ def __call__(self, i, bgr=False):
+ c = self.palette[int(i) % self.n]
+ return (c[2], c[1], c[0]) if bgr else c
+
+ @staticmethod
+ def hex2rgb(h): # rgb order (PIL)
+ return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))
+
+
+colors = Colors() # create instance for 'from utils.plots import colors'
+
+
+def check_pil_font(font=FONT, size=10):
+ # Return a PIL TrueType Font, downloading to CONFIG_DIR if necessary
+ font = Path(font)
+ font = font if font.exists() else (CONFIG_DIR / font.name)
+ try:
+ return ImageFont.truetype(str(font) if font.exists() else font.name, size)
+ except Exception: # download if missing
+ try:
+ check_font(font)
+ return ImageFont.truetype(str(font), size)
+ except TypeError:
+ check_requirements('Pillow>=8.4.0') # known issue https://github.com/ultralytics/yolov5/issues/5374
+ except URLError: # not online
+ return ImageFont.load_default()
+
+
+class Annotator:
+ # YOLOv5 Annotator for train/val mosaics and jpgs and detect/hub inference annotations
+ def __init__(self, im, line_width=None, font_size=None, font='Arial.ttf', pil=False, example='abc'):
+ assert im.data.contiguous, 'Image not contiguous. Apply np.ascontiguousarray(im) to Annotator() input images.'
+ non_ascii = not is_ascii(example) # non-latin labels, i.e. asian, arabic, cyrillic
+ self.pil = pil or non_ascii
+ if self.pil: # use PIL
+ self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
+ self.draw = ImageDraw.Draw(self.im)
+ self.font = check_pil_font(font='Arial.Unicode.ttf' if non_ascii else font,
+ size=font_size or max(round(sum(self.im.size) / 2 * 0.035), 12))
+ else: # use cv2
+ self.im = im
+ self.lw = line_width or max(round(sum(im.shape) / 2 * 0.003), 2) # line width
+
+ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 255)):
+ # Add one xyxy box to image with label
+ if self.pil or not is_ascii(label):
+ self.draw.rectangle(box, width=self.lw, outline=color) # box
+ if label:
+ w, h = self.font.getsize(label) # text width, height
+ outside = box[1] - h >= 0 # label fits outside box
+ self.draw.rectangle(
+ (box[0], box[1] - h if outside else box[1], box[0] + w + 1,
+ box[1] + 1 if outside else box[1] + h + 1),
+ fill=color,
+ )
+ # self.draw.text((box[0], box[1]), label, fill=txt_color, font=self.font, anchor='ls') # for PIL>8.0
+ self.draw.text((box[0], box[1] - h if outside else box[1]), label, fill=txt_color, font=self.font)
+ else: # cv2
+ p1, p2 = (int(box[0]), int(box[1])), (int(box[2]), int(box[3]))
+ cv2.rectangle(self.im, p1, p2, color, thickness=self.lw, lineType=cv2.LINE_AA)
+ if label:
+ tf = max(self.lw - 1, 1) # font thickness
+ w, h = cv2.getTextSize(label, 0, fontScale=self.lw / 3, thickness=tf)[0] # text width, height
+ outside = p1[1] - h >= 3
+ p2 = p1[0] + w, p1[1] - h - 3 if outside else p1[1] + h + 3
+ cv2.rectangle(self.im, p1, p2, color, -1, cv2.LINE_AA) # filled
+ cv2.putText(self.im,
+ label, (p1[0], p1[1] - 2 if outside else p1[1] + h + 2),
+ 0,
+ self.lw / 3,
+ txt_color,
+ thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ def rectangle(self, xy, fill=None, outline=None, width=1):
+ # Add rectangle to image (PIL-only)
+ self.draw.rectangle(xy, fill, outline, width)
+
+ def text(self, xy, text, txt_color=(255, 255, 255), anchor='top'):
+ # Add text to image (PIL-only)
+ if anchor == 'bottom': # start y from font bottom
+ w, h = self.font.getsize(text) # text width, height
+ xy[1] += 1 - h
+ self.draw.text(xy, text, fill=txt_color, font=self.font)
+
+ def fromarray(self, im):
+ # Update self.im from a numpy array
+ self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
+ self.draw = ImageDraw.Draw(self.im)
+
+ def result(self):
+ # Return annotated image as array
+ return np.asarray(self.im)
+
+
+def feature_visualization(x, module_type, stage, n=32, save_dir=Path('runs/detect/exp')):
+ """
+ x: Features to be visualized
+ module_type: Module type
+ stage: Module stage within model
+ n: Maximum number of feature maps to plot
+ save_dir: Directory to save results
+ """
+ if 'Detect' not in module_type:
+ batch, channels, height, width = x.shape # batch, channels, height, width
+ if height > 1 and width > 1:
+ f = save_dir / f"stage{stage}_{module_type.split('.')[-1]}_features.png" # filename
+
+ blocks = torch.chunk(x[0].cpu(), channels, dim=0) # select batch index 0, block by channels
+ n = min(n, channels) # number of plots
+ fig, ax = plt.subplots(math.ceil(n / 8), 8, tight_layout=True) # 8 rows x n/8 cols
+ ax = ax.ravel()
+ plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze()) # cmap='gray'
+ ax[i].axis('off')
+
+ LOGGER.info(f'Saving {f}... ({n}/{channels})')
+ plt.title('Features')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ np.save(str(f.with_suffix('.npy')), x[0].cpu().numpy()) # npy save
+
+
+def hist2d(x, y, n=100):
+ # 2d histogram used in labels.png and evolve.png
+ xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
+ hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
+ xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
+ yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
+ return np.log(hist[xidx, yidx])
+
+
+def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
+ from scipy.signal import butter, filtfilt
+
+ # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
+ def butter_lowpass(cutoff, fs, order):
+ nyq = 0.5 * fs
+ normal_cutoff = cutoff / nyq
+ return butter(order, normal_cutoff, btype='low', analog=False)
+
+ b, a = butter_lowpass(cutoff, fs, order=order)
+ return filtfilt(b, a, data) # forward-backward filter
+
+
+def output_to_target(output, max_det=300):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf] for plotting
+ targets = []
+ for i, o in enumerate(output):
+ box, conf, cls = o[:max_det, :6].cpu().split((4, 1, 1), 1)
+ j = torch.full((conf.shape[0], 1), i)
+ targets.append(torch.cat((j, cls, xyxy2xywh(box), conf), 1))
+ return torch.cat(targets, 0).numpy()
+
+
+@threaded
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None):
+ # Plot image grid with labels
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+
+ max_size = 1920 # max image size
+ max_subplots = 16 # max image subplots, i.e. 4x4
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
+
+ # Build Image
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, im in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ im = im.transpose(1, 2, 0)
+ mosaic[y:y + h, x:x + w, :] = im
+
+ # Resize (optional)
+ scale = max_size / ns / max(h, w)
+ if scale < 1:
+ h = math.ceil(scale * h)
+ w = math.ceil(scale * w)
+ mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
+
+ # Annotate
+ fs = int((h + w) * ns * 0.01) # font size
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
+ for i in range(i + 1):
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
+ if paths:
+ annotator.text((x + 5, y + 5), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ if len(targets) > 0:
+ ti = targets[targets[:, 0] == i] # image targets
+ boxes = xywh2xyxy(ti[:, 2:6]).T
+ classes = ti[:, 1].astype('int')
+ labels = ti.shape[1] == 6 # labels if no conf column
+ conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale < 1: # absolute coords need scale if image scales
+ boxes *= scale
+ boxes[[0, 2]] += x
+ boxes[[1, 3]] += y
+ for j, box in enumerate(boxes.T.tolist()):
+ cls = classes[j]
+ color = colors(cls)
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'
+ annotator.box_label(box, label, color=color)
+ annotator.im.save(fname) # save
+
+
+def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):
+ # Plot LR simulating training for full epochs
+ optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
+ y = []
+ for _ in range(epochs):
+ scheduler.step()
+ y.append(optimizer.param_groups[0]['lr'])
+ plt.plot(y, '.-', label='LR')
+ plt.xlabel('epoch')
+ plt.ylabel('LR')
+ plt.grid()
+ plt.xlim(0, epochs)
+ plt.ylim(0)
+ plt.savefig(Path(save_dir) / 'LR.png', dpi=200)
+ plt.close()
+
+
+def plot_val_txt(): # from utils.plots import *; plot_val()
+ # Plot val.txt histograms
+ x = np.loadtxt('val.txt', dtype=np.float32)
+ box = xyxy2xywh(x[:, :4])
+ cx, cy = box[:, 0], box[:, 1]
+
+ fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
+ ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
+ ax.set_aspect('equal')
+ plt.savefig('hist2d.png', dpi=300)
+
+ fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
+ ax[0].hist(cx, bins=600)
+ ax[1].hist(cy, bins=600)
+ plt.savefig('hist1d.png', dpi=200)
+
+
+def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
+ # Plot targets.txt histograms
+ x = np.loadtxt('targets.txt', dtype=np.float32).T
+ s = ['x targets', 'y targets', 'width targets', 'height targets']
+ fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(4):
+ ax[i].hist(x[i], bins=100, label=f'{x[i].mean():.3g} +/- {x[i].std():.3g}')
+ ax[i].legend()
+ ax[i].set_title(s[i])
+ plt.savefig('targets.jpg', dpi=200)
+
+
+def plot_val_study(file='', dir='', x=None): # from utils.plots import *; plot_val_study()
+ # Plot file=study.txt generated by val.py (or plot all study*.txt in dir)
+ save_dir = Path(file).parent if file else Path(dir)
+ plot2 = False # plot additional results
+ if plot2:
+ ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)[1].ravel()
+
+ fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
+ # for f in [save_dir / f'study_coco_{x}.txt' for x in ['yolov5n6', 'yolov5s6', 'yolov5m6', 'yolov5l6', 'yolov5x6']]:
+ for f in sorted(save_dir.glob('study*.txt')):
+ y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
+ x = np.arange(y.shape[1]) if x is None else np.array(x)
+ if plot2:
+ s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_preprocess (ms/img)', 't_inference (ms/img)', 't_NMS (ms/img)']
+ for i in range(7):
+ ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)
+ ax[i].set_title(s[i])
+
+ j = y[3].argmax() + 1
+ ax2.plot(y[5, 1:j],
+ y[3, 1:j] * 1E2,
+ '.-',
+ linewidth=2,
+ markersize=8,
+ label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
+
+ ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
+ 'k.-',
+ linewidth=2,
+ markersize=8,
+ alpha=.25,
+ label='EfficientDet')
+
+ ax2.grid(alpha=0.2)
+ ax2.set_yticks(np.arange(20, 60, 5))
+ ax2.set_xlim(0, 57)
+ ax2.set_ylim(25, 55)
+ ax2.set_xlabel('GPU Speed (ms/img)')
+ ax2.set_ylabel('COCO AP val')
+ ax2.legend(loc='lower right')
+ f = save_dir / 'study.png'
+ print(f'Saving {f}...')
+ plt.savefig(f, dpi=300)
+
+
+@TryExcept() # known issue https://github.com/ultralytics/yolov5/issues/5395
+def plot_labels(labels, names=(), save_dir=Path('')):
+ # plot dataset labels
+ LOGGER.info(f"Plotting labels to {save_dir / 'labels.jpg'}... ")
+ c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
+ nc = int(c.max() + 1) # number of classes
+ x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])
+
+ # seaborn correlogram
+ sn.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
+ plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)
+ plt.close()
+
+ # matplotlib labels
+ matplotlib.use('svg') # faster
+ ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
+ y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
+ with contextlib.suppress(Exception): # color histogram bars by class
+ [y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # known issue #3195
+ ax[0].set_ylabel('instances')
+ if 0 < len(names) < 30:
+ ax[0].set_xticks(range(len(names)))
+ ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ else:
+ ax[0].set_xlabel('classes')
+ sn.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
+ sn.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)
+
+ # rectangles
+ labels[:, 1:3] = 0.5 # center
+ labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
+ img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
+ for cls, *box in labels[:1000]:
+ ImageDraw.Draw(img).rectangle(box, width=1, outline=colors(cls)) # plot
+ ax[1].imshow(img)
+ ax[1].axis('off')
+
+ for a in [0, 1, 2, 3]:
+ for s in ['top', 'right', 'left', 'bottom']:
+ ax[a].spines[s].set_visible(False)
+
+ plt.savefig(save_dir / 'labels.jpg', dpi=200)
+ matplotlib.use('Agg')
+ plt.close()
+
+
+def imshow_cls(im, labels=None, pred=None, names=None, nmax=25, verbose=False, f=Path('images.jpg')):
+ # Show classification image grid with labels (optional) and predictions (optional)
+ from utils.augmentations import denormalize
+
+ names = names or [f'class{i}' for i in range(1000)]
+ blocks = torch.chunk(denormalize(im.clone()).cpu().float(), len(im),
+ dim=0) # select batch index 0, block by channels
+ n = min(len(blocks), nmax) # number of plots
+ m = min(8, round(n ** 0.5)) # 8 x 8 default
+ fig, ax = plt.subplots(math.ceil(n / m), m) # 8 rows x n/8 cols
+ ax = ax.ravel() if m > 1 else [ax]
+ # plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze().permute((1, 2, 0)).numpy().clip(0.0, 1.0))
+ ax[i].axis('off')
+ if labels is not None:
+ s = names[labels[i]] + (f'—{names[pred[i]]}' if pred is not None else '')
+ ax[i].set_title(s, fontsize=8, verticalalignment='top')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ if verbose:
+ LOGGER.info(f"Saving {f}")
+ if labels is not None:
+ LOGGER.info('True: ' + ' '.join(f'{names[i]:3s}' for i in labels[:nmax]))
+ if pred is not None:
+ LOGGER.info('Predicted:' + ' '.join(f'{names[i]:3s}' for i in pred[:nmax]))
+ return f
+
+
+def plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *; plot_evolve()
+ # Plot evolve.csv hyp evolution results
+ evolve_csv = Path(evolve_csv)
+ data = pd.read_csv(evolve_csv)
+ keys = [x.strip() for x in data.columns]
+ x = data.values
+ f = fitness(x)
+ j = np.argmax(f) # max fitness index
+ plt.figure(figsize=(10, 12), tight_layout=True)
+ matplotlib.rc('font', **{'size': 8})
+ print(f'Best results from row {j} of {evolve_csv}:')
+ for i, k in enumerate(keys[7:]):
+ v = x[:, 7 + i]
+ mu = v[j] # best single result
+ plt.subplot(6, 5, i + 1)
+ plt.scatter(v, f, c=hist2d(v, f, 20), cmap='viridis', alpha=.8, edgecolors='none')
+ plt.plot(mu, f.max(), 'k+', markersize=15)
+ plt.title(f'{k} = {mu:.3g}', fontdict={'size': 9}) # limit to 40 characters
+ if i % 5 != 0:
+ plt.yticks([])
+ print(f'{k:>15}: {mu:.3g}')
+ f = evolve_csv.with_suffix('.png') # filename
+ plt.savefig(f, dpi=200)
+ plt.close()
+ print(f'Saved {f}')
+
+
+def plot_results(file='path/to/results.csv', dir=''):
+ # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')
+ save_dir = Path(file).parent if file else Path(dir)
+ fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
+ ax = ax.ravel()
+ files = list(save_dir.glob('results*.csv'))
+ assert len(files), f'No results.csv files found in {save_dir.resolve()}, nothing to plot.'
+ for f in files:
+ try:
+ data = pd.read_csv(f)
+ s = [x.strip() for x in data.columns]
+ x = data.values[:, 0]
+ for i, j in enumerate([1, 2, 3, 4, 5, 8, 9, 10, 6, 7]):
+ y = data.values[:, j].astype('float')
+ # y[y == 0] = np.nan # don't show zero values
+ ax[i].plot(x, y, marker='.', label=f.stem, linewidth=2, markersize=8)
+ ax[i].set_title(s[j], fontsize=12)
+ # if j in [8, 9, 10]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ LOGGER.info(f'Warning: Plotting error for {f}: {e}')
+ ax[1].legend()
+ fig.savefig(save_dir / 'results.png', dpi=200)
+ plt.close()
+
+
+def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
+ # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()
+ ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
+ s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']
+ files = list(Path(save_dir).glob('frames*.txt'))
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
+ n = results.shape[1] # number of rows
+ x = np.arange(start, min(stop, n) if stop else n)
+ results = results[:, x]
+ t = (results[0] - results[0].min()) # set t0=0s
+ results[0] = x
+ for i, a in enumerate(ax):
+ if i < len(results):
+ label = labels[fi] if len(labels) else f.stem.replace('frames_', '')
+ a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)
+ a.set_title(s[i])
+ a.set_xlabel('time (s)')
+ # if fi == len(files) - 1:
+ # a.set_ylim(bottom=0)
+ for side in ['top', 'right']:
+ a.spines[side].set_visible(False)
+ else:
+ a.remove()
+ except Exception as e:
+ print(f'Warning: Plotting error for {f}; {e}')
+ ax[1].legend()
+ plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
+
+
+def save_one_box(xyxy, im, file=Path('im.jpg'), gain=1.02, pad=10, square=False, BGR=False, save=True):
+ # Save image crop as {file} with crop size multiple {gain} and {pad} pixels. Save and/or return crop
+ xyxy = torch.tensor(xyxy).view(-1, 4)
+ b = xyxy2xywh(xyxy) # boxes
+ if square:
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # attempt rectangle to square
+ b[:, 2:] = b[:, 2:] * gain + pad # box wh * gain + pad
+ xyxy = xywh2xyxy(b).long()
+ clip_coords(xyxy, im.shape)
+ crop = im[int(xyxy[0, 1]):int(xyxy[0, 3]), int(xyxy[0, 0]):int(xyxy[0, 2]), ::(1 if BGR else -1)]
+ if save:
+ file.parent.mkdir(parents=True, exist_ok=True) # make directory
+ f = str(increment_path(file).with_suffix('.jpg'))
+ # cv2.imwrite(f, crop) # save BGR, https://github.com/ultralytics/yolov5/issues/7007 chroma subsampling issue
+ Image.fromarray(crop[..., ::-1]).save(f, quality=95, subsampling=0) # save RGB
+ return crop
diff --git a/ipex/seg/utils/segment/__init__.py b/ipex/seg/utils/segment/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/ipex/seg/utils/segment/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/ipex/seg/utils/segment/augmentations.py b/ipex/seg/utils/segment/augmentations.py
new file mode 100644
index 000000000..169addedf
--- /dev/null
+++ b/ipex/seg/utils/segment/augmentations.py
@@ -0,0 +1,104 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Image augmentation functions
+"""
+
+import math
+import random
+
+import cv2
+import numpy as np
+
+from ..augmentations import box_candidates
+from ..general import resample_segments, segment2box
+
+
+def mixup(im, labels, segments, im2, labels2, segments2):
+ # Applies MixUp augmentation https://arxiv.org/pdf/1710.09412.pdf
+ r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
+ im = (im * r + im2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+ segments = np.concatenate((segments, segments2), 0)
+ return im, labels, segments
+
+
+def random_perspective(im,
+ targets=(),
+ segments=(),
+ degrees=10,
+ translate=.1,
+ scale=.1,
+ shear=10,
+ perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = im.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = im.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = (random.uniform(0.5 - translate, 0.5 + translate) * width) # x translation (pixels)
+ T[1, 2] = (random.uniform(0.5 - translate, 0.5 + translate) * height) # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(im[:, :, ::-1]) # base
+ # ax[1].imshow(im2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ new_segments = []
+ if n:
+ new = np.zeros((n, 4))
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]) # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+ new_segments.append(xy)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+ new_segments = np.array(new_segments)[i]
+
+ return im, targets, new_segments
diff --git a/ipex/seg/utils/segment/dataloaders.py b/ipex/seg/utils/segment/dataloaders.py
new file mode 100644
index 000000000..7bdb668ce
--- /dev/null
+++ b/ipex/seg/utils/segment/dataloaders.py
@@ -0,0 +1,331 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Dataloaders
+"""
+
+import os
+import random
+
+import cv2
+import numpy as np
+import torch
+from torch.utils.data import DataLoader, distributed
+
+from ..augmentations import augment_hsv, copy_paste, letterbox
+from ..dataloaders import InfiniteDataLoader, LoadImagesAndLabels, seed_worker
+from ..general import LOGGER, xyn2xy, xywhn2xyxy, xyxy2xywhn
+from ..torch_utils import torch_distributed_zero_first
+from .augmentations import mixup, random_perspective
+
+
+def create_dataloader(path,
+ imgsz,
+ batch_size,
+ stride,
+ single_cls=False,
+ hyp=None,
+ augment=False,
+ cache=False,
+ pad=0.0,
+ rect=False,
+ rank=-1,
+ workers=8,
+ image_weights=False,
+ quad=False,
+ prefix='',
+ shuffle=False,
+ mask_downsample_ratio=1,
+ overlap_mask=False):
+ if rect and shuffle:
+ LOGGER.warning('WARNING: --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ shuffle = False
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = LoadImagesAndLabelsAndMasks(
+ path,
+ imgsz,
+ batch_size,
+ augment=augment, # augmentation
+ hyp=hyp, # hyperparameters
+ rect=rect, # rectangular batches
+ cache_images=cache,
+ single_cls=single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix,
+ downsample_ratio=mask_downsample_ratio,
+ overlap=overlap_mask)
+
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count() # number of CUDA devices
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
+ # generator = torch.Generator()
+ # generator.manual_seed(0)
+ return loader(
+ dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabelsAndMasks.collate_fn4 if quad else LoadImagesAndLabelsAndMasks.collate_fn,
+ worker_init_fn=seed_worker,
+ # generator=generator,
+ ), dataset
+
+
+class LoadImagesAndLabelsAndMasks(LoadImagesAndLabels): # for training/testing
+
+ def __init__(
+ self,
+ path,
+ img_size=640,
+ batch_size=16,
+ augment=False,
+ hyp=None,
+ rect=False,
+ image_weights=False,
+ cache_images=False,
+ single_cls=False,
+ stride=32,
+ pad=0,
+ prefix="",
+ downsample_ratio=1,
+ overlap=False,
+ ):
+ super().__init__(path, img_size, batch_size, augment, hyp, rect, image_weights, cache_images, single_cls,
+ stride, pad, prefix)
+ self.downsample_ratio = downsample_ratio
+ self.overlap = overlap
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ masks = []
+ if mosaic:
+ # Load mosaic
+ img, labels, segments = self.load_mosaic(index)
+ shapes = None
+
+ # MixUp augmentation
+ if random.random() < hyp["mixup"]:
+ img, labels, segments = mixup(img, labels, segments, *self.load_mosaic(random.randint(0, self.n - 1)))
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = self.load_image(index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ # [array, array, ....], array.shape=(num_points, 2), xyxyxyxy
+ segments = self.segments[index].copy()
+ if len(segments):
+ for i_s in range(len(segments)):
+ segments[i_s] = xyn2xy(
+ segments[i_s],
+ ratio[0] * w,
+ ratio[1] * h,
+ padw=pad[0],
+ padh=pad[1],
+ )
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ img, labels, segments = random_perspective(
+ img,
+ labels,
+ segments=segments,
+ degrees=hyp["degrees"],
+ translate=hyp["translate"],
+ scale=hyp["scale"],
+ shear=hyp["shear"],
+ perspective=hyp["perspective"],
+ return_seg=True,
+ )
+
+ nl = len(labels) # number of labels
+ if nl:
+ labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1e-3)
+ if self.overlap:
+ masks, sorted_idx = polygons2masks_overlap(img.shape[:2],
+ segments,
+ downsample_ratio=self.downsample_ratio)
+ masks = masks[None] # (640, 640) -> (1, 640, 640)
+ labels = labels[sorted_idx]
+ else:
+ masks = polygons2masks(img.shape[:2], segments, color=1, downsample_ratio=self.downsample_ratio)
+
+ masks = (torch.from_numpy(masks) if len(masks) else torch.zeros(1 if self.overlap else nl, img.shape[0] //
+ self.downsample_ratio, img.shape[1] //
+ self.downsample_ratio))
+ # TODO: albumentations support
+ if self.augment:
+ # Albumentations
+ # there are some augmentation that won't change boxes and masks,
+ # so just be it for now.
+ img, labels = self.albumentations(img, labels)
+ nl = len(labels) # update after albumentations
+
+ # HSV color-space
+ augment_hsv(img, hgain=hyp["hsv_h"], sgain=hyp["hsv_s"], vgain=hyp["hsv_v"])
+
+ # Flip up-down
+ if random.random() < hyp["flipud"]:
+ img = np.flipud(img)
+ if nl:
+ labels[:, 2] = 1 - labels[:, 2]
+ masks = torch.flip(masks, dims=[1])
+
+ # Flip left-right
+ if random.random() < hyp["fliplr"]:
+ img = np.fliplr(img)
+ if nl:
+ labels[:, 1] = 1 - labels[:, 1]
+ masks = torch.flip(masks, dims=[2])
+
+ # Cutouts # labels = cutout(img, labels, p=0.5)
+
+ labels_out = torch.zeros((nl, 6))
+ if nl:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return (torch.from_numpy(img), labels_out, self.im_files[index], shapes, masks)
+
+ def load_mosaic(self, index):
+ # YOLOv5 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
+
+ # 3 additional image indices
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp["copy_paste"])
+ img4, labels4, segments4 = random_perspective(img4,
+ labels4,
+ segments4,
+ degrees=self.hyp["degrees"],
+ translate=self.hyp["translate"],
+ scale=self.hyp["scale"],
+ shear=self.hyp["shear"],
+ perspective=self.hyp["perspective"],
+ border=self.mosaic_border) # border to remove
+ return img4, labels4, segments4
+
+ @staticmethod
+ def collate_fn(batch):
+ img, label, path, shapes, masks = zip(*batch) # transposed
+ batched_masks = torch.cat(masks, 0)
+ for i, l in enumerate(label):
+ l[:, 0] = i # add target image index for build_targets()
+ return torch.stack(img, 0), torch.cat(label, 0), path, shapes, batched_masks
+
+
+def polygon2mask(img_size, polygons, color=1, downsample_ratio=1):
+ """
+ Args:
+ img_size (tuple): The image size.
+ polygons (np.ndarray): [N, M], N is the number of polygons,
+ M is the number of points(Be divided by 2).
+ """
+ mask = np.zeros(img_size, dtype=np.uint8)
+ polygons = np.asarray(polygons)
+ polygons = polygons.astype(np.int32)
+ shape = polygons.shape
+ polygons = polygons.reshape(shape[0], -1, 2)
+ cv2.fillPoly(mask, polygons, color=color)
+ nh, nw = (img_size[0] // downsample_ratio, img_size[1] // downsample_ratio)
+ # NOTE: fillPoly firstly then resize is trying the keep the same way
+ # of loss calculation when mask-ratio=1.
+ mask = cv2.resize(mask, (nw, nh))
+ return mask
+
+
+def polygons2masks(img_size, polygons, color, downsample_ratio=1):
+ """
+ Args:
+ img_size (tuple): The image size.
+ polygons (list[np.ndarray]): each polygon is [N, M],
+ N is the number of polygons,
+ M is the number of points(Be divided by 2).
+ """
+ masks = []
+ for si in range(len(polygons)):
+ mask = polygon2mask(img_size, [polygons[si].reshape(-1)], color, downsample_ratio)
+ masks.append(mask)
+ return np.array(masks)
+
+
+def polygons2masks_overlap(img_size, segments, downsample_ratio=1):
+ """Return a (640, 640) overlap mask."""
+ masks = np.zeros((img_size[0] // downsample_ratio, img_size[1] // downsample_ratio),
+ dtype=np.int32 if len(segments) > 255 else np.uint8)
+ areas = []
+ ms = []
+ for si in range(len(segments)):
+ mask = polygon2mask(
+ img_size,
+ [segments[si].reshape(-1)],
+ downsample_ratio=downsample_ratio,
+ color=1,
+ )
+ ms.append(mask)
+ areas.append(mask.sum())
+ areas = np.asarray(areas)
+ index = np.argsort(-areas)
+ ms = np.array(ms)[index]
+ for i in range(len(segments)):
+ mask = ms[i] * (i + 1)
+ masks = masks + mask
+ masks = np.clip(masks, a_min=0, a_max=i + 1)
+ return masks, index
diff --git a/ipex/seg/utils/segment/general.py b/ipex/seg/utils/segment/general.py
new file mode 100644
index 000000000..2c62e99b1
--- /dev/null
+++ b/ipex/seg/utils/segment/general.py
@@ -0,0 +1,128 @@
+import cv2
+import torch
+import torch.nn.functional as F
+
+
+def crop(masks, boxes):
+ """
+ "Crop" predicted masks by zeroing out everything not in the predicted bbox.
+ Vectorized by Chong (thanks Chong).
+
+ Args:
+ - masks should be a size [h, w, n] tensor of masks
+ - boxes should be a size [n, 4] tensor of bbox coords in relative point form
+ """
+
+ n, h, w = masks.shape
+ x1, y1, x2, y2 = torch.chunk(boxes[:, :, None], 4, 1) # x1 shape(1,1,n)
+ r = torch.arange(w, device=masks.device, dtype=x1.dtype)[None, None, :] # rows shape(1,w,1)
+ c = torch.arange(h, device=masks.device, dtype=x1.dtype)[None, :, None] # cols shape(h,1,1)
+
+ return masks * ((r >= x1) * (r < x2) * (c >= y1) * (c < y2))
+
+
+def process_mask_upsample(protos, masks_in, bboxes, shape):
+ """
+ Crop after upsample.
+ proto_out: [mask_dim, mask_h, mask_w]
+ out_masks: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape:input_image_size, (h, w)
+
+ return: h, w, n
+ """
+
+ c, mh, mw = protos.shape # CHW
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ masks = crop(masks, bboxes) # CHW
+ return masks.gt_(0.5)
+
+
+def process_mask(protos, masks_in, bboxes, shape, upsample=False):
+ """
+ Crop before upsample.
+ proto_out: [mask_dim, mask_h, mask_w]
+ out_masks: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape:input_image_size, (h, w)
+
+ return: h, w, n
+ """
+
+ c, mh, mw = protos.shape # CHW
+ ih, iw = shape
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw) # CHW
+
+ downsampled_bboxes = bboxes.clone()
+ downsampled_bboxes[:, 0] *= mw / iw
+ downsampled_bboxes[:, 2] *= mw / iw
+ downsampled_bboxes[:, 3] *= mh / ih
+ downsampled_bboxes[:, 1] *= mh / ih
+
+ masks = crop(masks, downsampled_bboxes) # CHW
+ if upsample:
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ return masks.gt_(0.5)
+
+
+def scale_masks(img1_shape, masks, img0_shape, ratio_pad=None):
+ """
+ img1_shape: model input shape, [h, w]
+ img0_shape: origin pic shape, [h, w, 3]
+ masks: [h, w, num]
+ resize for the most time
+ """
+ # Rescale coords (xyxy) from img1_shape to img0_shape
+ if ratio_pad is None: # calculate from img0_shape
+ gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
+ pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
+ else:
+ gain = ratio_pad[0][0]
+ pad = ratio_pad[1]
+ tl_pad = int(pad[1]), int(pad[0]) # y, x
+ br_pad = int(img1_shape[0] - pad[1]), int(img1_shape[1] - pad[0])
+
+ if len(masks.shape) < 2:
+ raise ValueError(f'"len of masks shape" should be 2 or 3, but got {len(masks.shape)}')
+ # masks_h, masks_w, n
+ masks = masks[tl_pad[0]:br_pad[0], tl_pad[1]:br_pad[1]]
+ # 1, n, masks_h, masks_w
+ # masks = masks.permute(2, 0, 1).contiguous()[None, :]
+ # # shape = [1, n, masks_h, masks_w] after F.interpolate, so take first element
+ # masks = F.interpolate(masks, img0_shape[:2], mode='bilinear', align_corners=False)[0]
+ # masks = masks.permute(1, 2, 0).contiguous()
+ # masks_h, masks_w, n
+ masks = cv2.resize(masks, (img0_shape[1], img0_shape[0]))
+
+ # keepdim
+ if len(masks.shape) == 2:
+ masks = masks[:, :, None]
+
+ return masks
+
+
+def mask_iou(mask1, mask2, eps=1e-7):
+ """
+ mask1: [N, n] m1 means number of predicted objects
+ mask2: [M, n] m2 means number of gt objects
+ Note: n means image_w x image_h
+
+ return: masks iou, [N, M]
+ """
+ intersection = torch.matmul(mask1, mask2.t()).clamp(0)
+ union = (mask1.sum(1)[:, None] + mask2.sum(1)[None]) - intersection # (area1 + area2) - intersection
+ return intersection / (union + eps)
+
+
+def masks_iou(mask1, mask2, eps=1e-7):
+ """
+ mask1: [N, n] m1 means number of predicted objects
+ mask2: [N, n] m2 means number of gt objects
+ Note: n means image_w x image_h
+
+ return: masks iou, (N, )
+ """
+ intersection = (mask1 * mask2).sum(1).clamp(0) # (N, )
+ union = (mask1.sum(1) + mask2.sum(1))[None] - intersection # (area1 + area2) - intersection
+ return intersection / (union + eps)
diff --git a/ipex/seg/utils/segment/loss.py b/ipex/seg/utils/segment/loss.py
new file mode 100644
index 000000000..fa1043488
--- /dev/null
+++ b/ipex/seg/utils/segment/loss.py
@@ -0,0 +1,186 @@
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+from ..general import xywh2xyxy
+from ..loss import FocalLoss, smooth_BCE
+from ..metrics import bbox_iou
+from ..torch_utils import de_parallel
+from .general import crop
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False, overlap=False):
+ self.sort_obj_iou = False
+ self.overlap = overlap
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+ self.device = device
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ m = de_parallel(model).model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
+ self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
+ self.na = m.na # number of anchors
+ self.nc = m.nc # number of classes
+ self.nl = m.nl # number of layers
+ self.nm = m.nm # number of masks
+ self.anchors = m.anchors
+ self.device = device
+
+ def __call__(self, preds, targets, masks): # predictions, targets, model
+ p, proto = preds
+ bs, nm, mask_h, mask_w = proto.shape # batch size, number of masks, mask height, mask width
+ lcls = torch.zeros(1, device=self.device)
+ lbox = torch.zeros(1, device=self.device)
+ lobj = torch.zeros(1, device=self.device)
+ lseg = torch.zeros(1, device=self.device)
+ tcls, tbox, indices, anchors, tidxs, xywhn = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ pxy, pwh, _, pcls, pmask = pi[b, a, gj, gi].split((2, 2, 1, self.nc, nm), 1) # subset of predictions
+
+ # Box regression
+ pxy = pxy.sigmoid() * 2 - 0.5
+ pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ iou = iou.detach().clamp(0).type(tobj.dtype)
+ if self.sort_obj_iou:
+ j = iou.argsort()
+ b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
+ if self.gr < 1:
+ iou = (1.0 - self.gr) + self.gr * iou
+ tobj[b, a, gj, gi] = iou # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(pcls, self.cn, device=self.device) # targets
+ t[range(n), tcls[i]] = self.cp
+ lcls += self.BCEcls(pcls, t) # BCE
+
+ # Mask regression
+ if tuple(masks.shape[-2:]) != (mask_h, mask_w): # downsample
+ masks = F.interpolate(masks[None], (mask_h, mask_w), mode="bilinear", align_corners=False)[0]
+ marea = xywhn[i][:, 2:].prod(1) # mask width, height normalized
+ mxyxy = xywh2xyxy(xywhn[i] * torch.tensor([mask_w, mask_h, mask_w, mask_h], device=self.device))
+ for bi in b.unique():
+ j = b == bi # matching index
+ if self.overlap:
+ mask_gti = torch.where(masks[bi][None] == tidxs[i][j].view(-1, 1, 1), 1.0, 0.0)
+ else:
+ mask_gti = masks[tidxs[i]][j]
+ lseg += self.single_mask_loss(mask_gti, pmask[j], proto[bi], mxyxy[j], marea[j])
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp["box"]
+ lobj *= self.hyp["obj"]
+ lcls *= self.hyp["cls"]
+ lseg *= self.hyp["box"] / bs
+
+ loss = lbox + lobj + lcls + lseg
+ return loss * bs, torch.cat((lbox, lseg, lobj, lcls)).detach()
+
+ def single_mask_loss(self, gt_mask, pred, proto, xyxy, area):
+ # Mask loss for one image
+ pred_mask = (pred @ proto.view(self.nm, -1)).view(-1, *proto.shape[1:]) # (n,32) @ (32,80,80) -> (n,80,80)
+ loss = F.binary_cross_entropy_with_logits(pred_mask, gt_mask, reduction="none")
+ return (crop(loss, xyxy).mean(dim=(1, 2)) / area).mean()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch, tidxs, xywhn = [], [], [], [], [], []
+ gain = torch.ones(8, device=self.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ if self.overlap:
+ batch = p[0].shape[0]
+ ti = []
+ for i in range(batch):
+ num = (targets[:, 0] == i).sum() # find number of targets of each image
+ ti.append(torch.arange(num, device=self.device).float().view(1, num).repeat(na, 1) + 1) # (na, num)
+ ti = torch.cat(ti, 1) # (na, nt)
+ else:
+ ti = torch.arange(nt, device=self.device).float().view(1, nt).repeat(na, 1)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None], ti[..., None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor(
+ [
+ [0, 0],
+ [1, 0],
+ [0, 1],
+ [-1, 0],
+ [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ],
+ device=self.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors, shape = self.anchors[i], p[i].shape
+ gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain # shape(3,n,7)
+ if nt:
+ # Matches
+ r = t[..., 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1 < g) & (gxy > 1)).T
+ l, m = ((gxi % 1 < g) & (gxi > 1)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ bc, gxy, gwh, at = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
+ (a, tidx), (b, c) = at.long().T, bc.long().T # anchors, image, class
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid indices
+
+ # Append
+ indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+ tidxs.append(tidx)
+ xywhn.append(torch.cat((gxy, gwh), 1) / gain[2:6]) # xywh normalized
+
+ return tcls, tbox, indices, anch, tidxs, xywhn
diff --git a/ipex/seg/utils/segment/metrics.py b/ipex/seg/utils/segment/metrics.py
new file mode 100644
index 000000000..b09ce23fb
--- /dev/null
+++ b/ipex/seg/utils/segment/metrics.py
@@ -0,0 +1,210 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Model validation metrics
+"""
+
+import numpy as np
+
+from ..metrics import ap_per_class
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9, 0.0, 0.0, 0.1, 0.9]
+ return (x[:, :8] * w).sum(1)
+
+
+def ap_per_class_box_and_mask(
+ tp_m,
+ tp_b,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=False,
+ save_dir=".",
+ names=(),
+):
+ """
+ Args:
+ tp_b: tp of boxes.
+ tp_m: tp of masks.
+ other arguments see `func: ap_per_class`.
+ """
+ results_boxes = ap_per_class(tp_b,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=plot,
+ save_dir=save_dir,
+ names=names,
+ prefix="Box")[2:]
+ results_masks = ap_per_class(tp_m,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=plot,
+ save_dir=save_dir,
+ names=names,
+ prefix="Mask")[2:]
+
+ results = {
+ "boxes": {
+ "p": results_boxes[0],
+ "r": results_boxes[1],
+ "ap": results_boxes[3],
+ "f1": results_boxes[2],
+ "ap_class": results_boxes[4]},
+ "masks": {
+ "p": results_masks[0],
+ "r": results_masks[1],
+ "ap": results_masks[3],
+ "f1": results_masks[2],
+ "ap_class": results_masks[4]}}
+ return results
+
+
+class Metric:
+
+ def __init__(self) -> None:
+ self.p = [] # (nc, )
+ self.r = [] # (nc, )
+ self.f1 = [] # (nc, )
+ self.all_ap = [] # (nc, 10)
+ self.ap_class_index = [] # (nc, )
+
+ @property
+ def ap50(self):
+ """AP@0.5 of all classes.
+ Return:
+ (nc, ) or [].
+ """
+ return self.all_ap[:, 0] if len(self.all_ap) else []
+
+ @property
+ def ap(self):
+ """AP@0.5:0.95
+ Return:
+ (nc, ) or [].
+ """
+ return self.all_ap.mean(1) if len(self.all_ap) else []
+
+ @property
+ def mp(self):
+ """mean precision of all classes.
+ Return:
+ float.
+ """
+ return self.p.mean() if len(self.p) else 0.0
+
+ @property
+ def mr(self):
+ """mean recall of all classes.
+ Return:
+ float.
+ """
+ return self.r.mean() if len(self.r) else 0.0
+
+ @property
+ def map50(self):
+ """Mean AP@0.5 of all classes.
+ Return:
+ float.
+ """
+ return self.all_ap[:, 0].mean() if len(self.all_ap) else 0.0
+
+ @property
+ def map(self):
+ """Mean AP@0.5:0.95 of all classes.
+ Return:
+ float.
+ """
+ return self.all_ap.mean() if len(self.all_ap) else 0.0
+
+ def mean_results(self):
+ """Mean of results, return mp, mr, map50, map"""
+ return (self.mp, self.mr, self.map50, self.map)
+
+ def class_result(self, i):
+ """class-aware result, return p[i], r[i], ap50[i], ap[i]"""
+ return (self.p[i], self.r[i], self.ap50[i], self.ap[i])
+
+ def get_maps(self, nc):
+ maps = np.zeros(nc) + self.map
+ for i, c in enumerate(self.ap_class_index):
+ maps[c] = self.ap[i]
+ return maps
+
+ def update(self, results):
+ """
+ Args:
+ results: tuple(p, r, ap, f1, ap_class)
+ """
+ p, r, all_ap, f1, ap_class_index = results
+ self.p = p
+ self.r = r
+ self.all_ap = all_ap
+ self.f1 = f1
+ self.ap_class_index = ap_class_index
+
+
+class Metrics:
+ """Metric for boxes and masks."""
+
+ def __init__(self) -> None:
+ self.metric_box = Metric()
+ self.metric_mask = Metric()
+
+ def update(self, results):
+ """
+ Args:
+ results: Dict{'boxes': Dict{}, 'masks': Dict{}}
+ """
+ self.metric_box.update(list(results["boxes"].values()))
+ self.metric_mask.update(list(results["masks"].values()))
+
+ def mean_results(self):
+ return self.metric_box.mean_results() + self.metric_mask.mean_results()
+
+ def class_result(self, i):
+ return self.metric_box.class_result(i) + self.metric_mask.class_result(i)
+
+ def get_maps(self, nc):
+ return self.metric_box.get_maps(nc) + self.metric_mask.get_maps(nc)
+
+ @property
+ def ap_class_index(self):
+ # boxes and masks have the same ap_class_index
+ return self.metric_box.ap_class_index
+
+
+KEYS = [
+ "train/box_loss",
+ "train/seg_loss", # train loss
+ "train/obj_loss",
+ "train/cls_loss",
+ "metrics/precision(B)",
+ "metrics/recall(B)",
+ "metrics/mAP_0.5(B)",
+ "metrics/mAP_0.5:0.95(B)", # metrics
+ "metrics/precision(M)",
+ "metrics/recall(M)",
+ "metrics/mAP_0.5(M)",
+ "metrics/mAP_0.5:0.95(M)", # metrics
+ "val/box_loss",
+ "val/seg_loss", # val loss
+ "val/obj_loss",
+ "val/cls_loss",
+ "x/lr0",
+ "x/lr1",
+ "x/lr2",]
+
+BEST_KEYS = [
+ "best/epoch",
+ "best/precision(B)",
+ "best/recall(B)",
+ "best/mAP_0.5(B)",
+ "best/mAP_0.5:0.95(B)",
+ "best/precision(M)",
+ "best/recall(M)",
+ "best/mAP_0.5(M)",
+ "best/mAP_0.5:0.95(M)",]
diff --git a/ipex/seg/utils/segment/plots.py b/ipex/seg/utils/segment/plots.py
new file mode 100644
index 000000000..eac46d985
--- /dev/null
+++ b/ipex/seg/utils/segment/plots.py
@@ -0,0 +1,182 @@
+import contextlib
+import math
+from pathlib import Path
+
+import cv2
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import torch
+
+from .. import threaded
+from ..general import xywh2xyxy
+from ..plots import Annotator, colors
+
+
+def plot_masks(img, masks, colors, alpha=0.5):
+ """
+ Args:
+ img (tensor): img is in cuda, shape: [3, h, w], range: [0, 1]
+ masks (tensor): predicted masks on cuda, shape: [n, h, w]
+ colors (List[List[Int]]): colors for predicted masks, [[r, g, b] * n]
+ Return:
+ ndarray: img after draw masks, shape: [h, w, 3]
+
+ transform colors and send img_gpu to cpu for the most time.
+ """
+ img_gpu = img.clone()
+ num_masks = len(masks)
+ if num_masks == 0:
+ return img.permute(1, 2, 0).contiguous().cpu().numpy() * 255
+
+ # [n, 1, 1, 3]
+ # faster this way to transform colors
+ colors = torch.tensor(colors, device=img.device).float() / 255.0
+ colors = colors[:, None, None, :]
+ # [n, h, w, 1]
+ masks = masks[:, :, :, None]
+ masks_color = masks.repeat(1, 1, 1, 3) * colors * alpha
+ inv_alph_masks = masks * (-alpha) + 1
+ masks_color_summand = masks_color[0]
+ if num_masks > 1:
+ inv_alph_cumul = inv_alph_masks[:(num_masks - 1)].cumprod(dim=0)
+ masks_color_cumul = masks_color[1:] * inv_alph_cumul
+ masks_color_summand += masks_color_cumul.sum(dim=0)
+
+ # print(inv_alph_masks.prod(dim=0).shape) # [h, w, 1]
+ img_gpu = img_gpu.flip(dims=[0]) # filp channel for opencv
+ img_gpu = img_gpu.permute(1, 2, 0).contiguous()
+ # [h, w, 3]
+ img_gpu = img_gpu * inv_alph_masks.prod(dim=0) + masks_color_summand
+ return (img_gpu * 255).byte().cpu().numpy()
+
+
+@threaded
+def plot_images_and_masks(images, targets, masks, paths=None, fname='images.jpg', names=None):
+ # Plot image grid with labels
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+ if isinstance(masks, torch.Tensor):
+ masks = masks.cpu().numpy().astype(int)
+
+ max_size = 1920 # max image size
+ max_subplots = 16 # max image subplots, i.e. 4x4
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
+
+ # Build Image
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, im in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ im = im.transpose(1, 2, 0)
+ mosaic[y:y + h, x:x + w, :] = im
+
+ # Resize (optional)
+ scale = max_size / ns / max(h, w)
+ if scale < 1:
+ h = math.ceil(scale * h)
+ w = math.ceil(scale * w)
+ mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
+
+ # Annotate
+ fs = int((h + w) * ns * 0.01) # font size
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
+ for i in range(i + 1):
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
+ if paths:
+ annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ if len(targets) > 0:
+ idx = targets[:, 0] == i
+ ti = targets[idx] # image targets
+
+ boxes = xywh2xyxy(ti[:, 2:6]).T
+ classes = ti[:, 1].astype('int')
+ labels = ti.shape[1] == 6 # labels if no conf column
+ conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale < 1: # absolute coords need scale if image scales
+ boxes *= scale
+ boxes[[0, 2]] += x
+ boxes[[1, 3]] += y
+ for j, box in enumerate(boxes.T.tolist()):
+ cls = classes[j]
+ color = colors(cls)
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'
+ annotator.box_label(box, label, color=color)
+
+ # Plot masks
+ if len(masks):
+ if masks.max() > 1.0: # mean that masks are overlap
+ image_masks = masks[[i]] # (1, 640, 640)
+ nl = len(ti)
+ index = np.arange(nl).reshape(nl, 1, 1) + 1
+ image_masks = np.repeat(image_masks, nl, axis=0)
+ image_masks = np.where(image_masks == index, 1.0, 0.0)
+ else:
+ image_masks = masks[idx]
+
+ im = np.asarray(annotator.im).copy()
+ for j, box in enumerate(boxes.T.tolist()):
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ color = colors(classes[j])
+ mh, mw = image_masks[j].shape
+ if mh != h or mw != w:
+ mask = image_masks[j].astype(np.uint8)
+ mask = cv2.resize(mask, (w, h))
+ mask = mask.astype(np.bool)
+ else:
+ mask = image_masks[j].astype(np.bool)
+ with contextlib.suppress(Exception):
+ im[y:y + h, x:x + w, :][mask] = im[y:y + h, x:x + w, :][mask] * 0.4 + np.array(color) * 0.6
+ annotator.fromarray(im)
+ annotator.im.save(fname) # save
+
+
+def plot_results_with_masks(file="path/to/results.csv", dir="", best=True):
+ # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')
+ save_dir = Path(file).parent if file else Path(dir)
+ fig, ax = plt.subplots(2, 8, figsize=(18, 6), tight_layout=True)
+ ax = ax.ravel()
+ files = list(save_dir.glob("results*.csv"))
+ assert len(files), f"No results.csv files found in {save_dir.resolve()}, nothing to plot."
+ for f in files:
+ try:
+ data = pd.read_csv(f)
+ index = np.argmax(
+ 0.9 * data.values[:, 8] + 0.1 * data.values[:, 7] + 0.9 * data.values[:, 12] +
+ 0.1 * data.values[:, 11],)
+ s = [x.strip() for x in data.columns]
+ x = data.values[:, 0]
+ for i, j in enumerate([1, 2, 3, 4, 5, 6, 9, 10, 13, 14, 15, 16, 7, 8, 11, 12]):
+ y = data.values[:, j]
+ # y[y == 0] = np.nan # don't show zero values
+ ax[i].plot(x, y, marker=".", label=f.stem, linewidth=2, markersize=2)
+ if best:
+ # best
+ ax[i].scatter(index, y[index], color="r", label=f"best:{index}", marker="*", linewidth=3)
+ ax[i].set_title(s[j] + f"\n{round(y[index], 5)}")
+ else:
+ # last
+ ax[i].scatter(x[-1], y[-1], color="r", label="last", marker="*", linewidth=3)
+ ax[i].set_title(s[j] + f"\n{round(y[-1], 5)}")
+ # if j in [8, 9, 10]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print(f"Warning: Plotting error for {f}: {e}")
+ ax[1].legend()
+ fig.savefig(save_dir / "results.png", dpi=200)
+ plt.close()
diff --git a/ipex/seg/utils/torch_utils.py b/ipex/seg/utils/torch_utils.py
new file mode 100644
index 000000000..d31c9bfef
--- /dev/null
+++ b/ipex/seg/utils/torch_utils.py
@@ -0,0 +1,441 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+PyTorch utils
+"""
+
+import math
+import os
+import platform
+import subprocess
+import time
+import warnings
+from contextlib import contextmanager
+from copy import deepcopy
+from pathlib import Path
+
+import torch
+import torch.distributed as dist
+import torch.nn as nn
+import torch.nn.functional as F
+from torch.nn.parallel import DistributedDataParallel as DDP
+
+from utils.general import LOGGER, check_version, colorstr, file_date, git_describe
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+try:
+ import thop # for FLOPs computation
+except ImportError:
+ thop = None
+
+# Suppress PyTorch warnings
+warnings.filterwarnings('ignore', message='User provided device_type of \'cuda\', but CUDA is not available. Disabling')
+
+
+def smart_inference_mode(torch_1_9=check_version(torch.__version__, '1.9.0')):
+ # Applies torch.inference_mode() decorator if torch>=1.9.0 else torch.no_grad() decorator
+ def decorate(fn):
+ return (torch.inference_mode if torch_1_9 else torch.no_grad)()(fn)
+
+ return decorate
+
+
+def smartCrossEntropyLoss(label_smoothing=0.0):
+ # Returns nn.CrossEntropyLoss with label smoothing enabled for torch>=1.10.0
+ if check_version(torch.__version__, '1.10.0'):
+ return nn.CrossEntropyLoss(label_smoothing=label_smoothing)
+ if label_smoothing > 0:
+ LOGGER.warning(f'WARNING: label smoothing {label_smoothing} requires torch>=1.10.0')
+ return nn.CrossEntropyLoss()
+
+
+def smart_DDP(model):
+ # Model DDP creation with checks
+ assert not check_version(torch.__version__, '1.12.0', pinned=True), \
+ 'torch==1.12.0 torchvision==0.13.0 DDP training is not supported due to a known issue. ' \
+ 'Please upgrade or downgrade torch to use DDP. See https://github.com/ultralytics/yolov5/issues/8395'
+ if check_version(torch.__version__, '1.11.0'):
+ return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK, static_graph=True)
+ else:
+ return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK)
+
+
+def reshape_classifier_output(model, n=1000):
+ # Update a TorchVision classification model to class count 'n' if required
+ from models.common import Classify
+ name, m = list((model.model if hasattr(model, 'model') else model).named_children())[-1] # last module
+ if isinstance(m, Classify): # YOLOv5 Classify() head
+ if m.linear.out_features != n:
+ m.linear = nn.Linear(m.linear.in_features, n)
+ elif isinstance(m, nn.Linear): # ResNet, EfficientNet
+ if m.out_features != n:
+ setattr(model, name, nn.Linear(m.in_features, n))
+ elif isinstance(m, nn.Sequential):
+ types = [type(x) for x in m]
+ if nn.Linear in types:
+ i = types.index(nn.Linear) # nn.Linear index
+ if m[i].out_features != n:
+ m[i] = nn.Linear(m[i].in_features, n)
+ elif nn.Conv2d in types:
+ i = types.index(nn.Conv2d) # nn.Conv2d index
+ if m[i].out_channels != n:
+ m[i] = nn.Conv2d(m[i].in_channels, n, m[i].kernel_size, m[i].stride, bias=m[i].bias)
+
+
+@contextmanager
+def torch_distributed_zero_first(local_rank: int):
+ # Decorator to make all processes in distributed training wait for each local_master to do something
+ if local_rank not in [-1, 0]:
+ dist.barrier(device_ids=[local_rank])
+ yield
+ if local_rank == 0:
+ dist.barrier(device_ids=[0])
+
+
+def device_count():
+ # Returns number of CUDA devices available. Safe version of torch.cuda.device_count(). Supports Linux and Windows
+ assert platform.system() in ('Linux', 'Windows'), 'device_count() only supported on Linux or Windows'
+ try:
+ cmd = 'nvidia-smi -L | wc -l' if platform.system() == 'Linux' else 'nvidia-smi -L | find /c /v ""' # Windows
+ return int(subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1])
+ except Exception:
+ return 0
+
+
+def select_device(device='', batch_size=0, newline=True):
+ # device = None or 'cpu' or 0 or '0' or '0,1,2,3'
+ s = f'YOLOv5 🚀 {git_describe() or file_date()} Python-{platform.python_version()} torch-{torch.__version__} '
+ device = str(device).strip().lower().replace('cuda:', '').replace('none', '') # to string, 'cuda:0' to '0'
+ cpu = device == 'cpu'
+ mps = device == 'mps' # Apple Metal Performance Shaders (MPS)
+ if cpu or mps:
+ os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
+ elif device: # non-cpu device requested
+ os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable - must be before assert is_available()
+ assert torch.cuda.is_available() and torch.cuda.device_count() >= len(device.replace(',', '')), \
+ f"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)"
+
+ if not cpu and not mps and torch.cuda.is_available(): # prefer GPU if available
+ devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7
+ n = len(devices) # device count
+ if n > 1 and batch_size > 0: # check batch_size is divisible by device_count
+ assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
+ space = ' ' * (len(s) + 1)
+ for i, d in enumerate(devices):
+ p = torch.cuda.get_device_properties(i)
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / (1 << 20):.0f}MiB)\n" # bytes to MB
+ arg = 'cuda:0'
+ elif mps and getattr(torch, 'has_mps', False) and torch.backends.mps.is_available(): # prefer MPS if available
+ s += 'MPS\n'
+ arg = 'mps'
+ else: # revert to CPU
+ s += 'CPU\n'
+ arg = 'cpu'
+
+ if not newline:
+ s = s.rstrip()
+ LOGGER.info(s)
+ return torch.device(arg)
+
+
+def time_sync():
+ # PyTorch-accurate time
+ if torch.cuda.is_available():
+ torch.cuda.synchronize()
+ return time.time()
+
+
+def profile(input, ops, n=10, device=None):
+ """ YOLOv5 speed/memory/FLOPs profiler
+ Usage:
+ input = torch.randn(16, 3, 640, 640)
+ m1 = lambda x: x * torch.sigmoid(x)
+ m2 = nn.SiLU()
+ profile(input, [m1, m2], n=100) # profile over 100 iterations
+ """
+ results = []
+ if not isinstance(device, torch.device):
+ device = select_device(device)
+ print(f"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}"
+ f"{'input':>24s}{'output':>24s}")
+
+ for x in input if isinstance(input, list) else [input]:
+ x = x.to(device)
+ x.requires_grad = True
+ for m in ops if isinstance(ops, list) else [ops]:
+ m = m.to(device) if hasattr(m, 'to') else m # device
+ m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m
+ tf, tb, t = 0, 0, [0, 0, 0] # dt forward, backward
+ try:
+ flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPs
+ except Exception:
+ flops = 0
+
+ try:
+ for _ in range(n):
+ t[0] = time_sync()
+ y = m(x)
+ t[1] = time_sync()
+ try:
+ _ = (sum(yi.sum() for yi in y) if isinstance(y, list) else y).sum().backward()
+ t[2] = time_sync()
+ except Exception: # no backward method
+ # print(e) # for debug
+ t[2] = float('nan')
+ tf += (t[1] - t[0]) * 1000 / n # ms per op forward
+ tb += (t[2] - t[1]) * 1000 / n # ms per op backward
+ mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0 # (GB)
+ s_in, s_out = (tuple(x.shape) if isinstance(x, torch.Tensor) else 'list' for x in (x, y)) # shapes
+ p = sum(x.numel() for x in m.parameters()) if isinstance(m, nn.Module) else 0 # parameters
+ print(f'{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}')
+ results.append([p, flops, mem, tf, tb, s_in, s_out])
+ except Exception as e:
+ print(e)
+ results.append(None)
+ torch.cuda.empty_cache()
+ return results
+
+
+def is_parallel(model):
+ # Returns True if model is of type DP or DDP
+ return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
+
+
+def de_parallel(model):
+ # De-parallelize a model: returns single-GPU model if model is of type DP or DDP
+ return model.module if is_parallel(model) else model
+
+
+def initialize_weights(model):
+ for m in model.modules():
+ t = type(m)
+ if t is nn.Conv2d:
+ pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
+ elif t is nn.BatchNorm2d:
+ m.eps = 1e-3
+ m.momentum = 0.03
+ elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
+ m.inplace = True
+
+
+def find_modules(model, mclass=nn.Conv2d):
+ # Finds layer indices matching module class 'mclass'
+ return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
+
+
+def sparsity(model):
+ # Return global model sparsity
+ a, b = 0, 0
+ for p in model.parameters():
+ a += p.numel()
+ b += (p == 0).sum()
+ return b / a
+
+
+def prune(model, amount=0.3):
+ # Prune model to requested global sparsity
+ import torch.nn.utils.prune as prune
+ for name, m in model.named_modules():
+ if isinstance(m, nn.Conv2d):
+ prune.l1_unstructured(m, name='weight', amount=amount) # prune
+ prune.remove(m, 'weight') # make permanent
+ LOGGER.info(f'Model pruned to {sparsity(model):.3g} global sparsity')
+
+
+def fuse_conv_and_bn(conv, bn):
+ # Fuse Conv2d() and BatchNorm2d() layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
+ fusedconv = nn.Conv2d(conv.in_channels,
+ conv.out_channels,
+ kernel_size=conv.kernel_size,
+ stride=conv.stride,
+ padding=conv.padding,
+ groups=conv.groups,
+ bias=True).requires_grad_(False).to(conv.weight.device)
+
+ # Prepare filters
+ w_conv = conv.weight.clone().view(conv.out_channels, -1)
+ w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
+ fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
+
+ # Prepare spatial bias
+ b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
+ b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
+ fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
+
+ return fusedconv
+
+
+def model_info(model, verbose=False, imgsz=640):
+ # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
+ n_p = sum(x.numel() for x in model.parameters()) # number parameters
+ n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
+ if verbose:
+ print(f"{'layer':>5} {'name':>40} {'gradient':>9} {'parameters':>12} {'shape':>20} {'mu':>10} {'sigma':>10}")
+ for i, (name, p) in enumerate(model.named_parameters()):
+ name = name.replace('module_list.', '')
+ print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
+ (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
+
+ try: # FLOPs
+ p = next(model.parameters())
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32 # max stride
+ im = torch.empty((1, p.shape[1], stride, stride), device=p.device) # input image in BCHW format
+ flops = thop.profile(deepcopy(model), inputs=(im,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
+ imgsz = imgsz if isinstance(imgsz, list) else [imgsz, imgsz] # expand if int/float
+ fs = f', {flops * imgsz[0] / stride * imgsz[1] / stride:.1f} GFLOPs' # 640x640 GFLOPs
+ except Exception:
+ fs = ''
+
+ name = Path(model.yaml_file).stem.replace('yolov5', 'YOLOv5') if hasattr(model, 'yaml_file') else 'Model'
+ LOGGER.info(f"{name} summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
+
+
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # Scales img(bs,3,y,x) by ratio constrained to gs-multiple
+ if ratio == 1.0:
+ return img
+ h, w = img.shape[2:]
+ s = (int(h * ratio), int(w * ratio)) # new size
+ img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
+ if not same_shape: # pad/crop img
+ h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))
+ return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
+
+
+def copy_attr(a, b, include=(), exclude=()):
+ # Copy attributes from b to a, options to only include [...] and to exclude [...]
+ for k, v in b.__dict__.items():
+ if (len(include) and k not in include) or k.startswith('_') or k in exclude:
+ continue
+ else:
+ setattr(a, k, v)
+
+
+def smart_optimizer(model, name='Adam', lr=0.001, momentum=0.9, decay=1e-5):
+ # YOLOv5 3-param group optimizer: 0) weights with decay, 1) weights no decay, 2) biases no decay
+ g = [], [], [] # optimizer parameter groups
+ bn = tuple(v for k, v in nn.__dict__.items() if 'Norm' in k) # normalization layers, i.e. BatchNorm2d()
+ for v in model.modules():
+ if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter): # bias (no decay)
+ g[2].append(v.bias)
+ if isinstance(v, bn): # weight (no decay)
+ g[1].append(v.weight)
+ elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter): # weight (with decay)
+ g[0].append(v.weight)
+ if hasattr(v, 'im'):
+ if hasattr(v.im, 'implicit'):
+ g[1].append(v.im.implicit)
+ else:
+ for iv in v.im:
+ g[1].append(iv.implicit)
+ if hasattr(v, 'ia'):
+ if hasattr(v.ia, 'implicit'):
+ g[1].append(v.ia.implicit)
+ else:
+ for iv in v.ia:
+ g[1].append(iv.implicit)
+
+ if name == 'Adam':
+ optimizer = torch.optim.Adam(g[2], lr=lr, betas=(momentum, 0.999)) # adjust beta1 to momentum
+ elif name == 'AdamW':
+ optimizer = torch.optim.AdamW(g[2], lr=lr, betas=(momentum, 0.999), weight_decay=0.0)
+ elif name == 'RMSProp':
+ optimizer = torch.optim.RMSprop(g[2], lr=lr, momentum=momentum)
+ elif name == 'SGD':
+ optimizer = torch.optim.SGD(g[2], lr=lr, momentum=momentum, nesterov=True)
+ else:
+ raise NotImplementedError(f'Optimizer {name} not implemented.')
+
+ optimizer.add_param_group({'params': g[0], 'weight_decay': decay}) # add g0 with weight_decay
+ optimizer.add_param_group({'params': g[1], 'weight_decay': 0.0}) # add g1 (BatchNorm2d weights)
+ LOGGER.info(f"{colorstr('optimizer:')} {type(optimizer).__name__}(lr={lr}) with parameter groups "
+ f"{len(g[1])} weight(decay=0.0), {len(g[0])} weight(decay={decay}), {len(g[2])} bias")
+ return optimizer
+
+
+def smart_hub_load(repo='ultralytics/yolov5', model='yolov5s', **kwargs):
+ # YOLOv5 torch.hub.load() wrapper with smart error/issue handling
+ if check_version(torch.__version__, '1.9.1'):
+ kwargs['skip_validation'] = True # validation causes GitHub API rate limit errors
+ if check_version(torch.__version__, '1.12.0'):
+ kwargs['trust_repo'] = True # argument required starting in torch 0.12
+ try:
+ return torch.hub.load(repo, model, **kwargs)
+ except Exception:
+ return torch.hub.load(repo, model, force_reload=True, **kwargs)
+
+
+def smart_resume(ckpt, optimizer, ema=None, weights='yolov5s.pt', epochs=300, resume=True):
+ # Resume training from a partially trained checkpoint
+ best_fitness = 0.0
+ start_epoch = ckpt['epoch'] + 1
+ if ckpt['optimizer'] is not None:
+ optimizer.load_state_dict(ckpt['optimizer']) # optimizer
+ best_fitness = ckpt['best_fitness']
+ if ema and ckpt.get('ema'):
+ ema.ema.load_state_dict(ckpt['ema'].float().state_dict()) # EMA
+ ema.updates = ckpt['updates']
+ if resume:
+ assert start_epoch > 0, f'{weights} training to {epochs} epochs is finished, nothing to resume.\n' \
+ f"Start a new training without --resume, i.e. 'python train.py --weights {weights}'"
+ LOGGER.info(f'Resuming training from {weights} from epoch {start_epoch} to {epochs} total epochs')
+ if epochs < start_epoch:
+ LOGGER.info(f"{weights} has been trained for {ckpt['epoch']} epochs. Fine-tuning for {epochs} more epochs.")
+ epochs += ckpt['epoch'] # finetune additional epochs
+ return best_fitness, start_epoch, epochs
+
+
+class EarlyStopping:
+ # YOLOv5 simple early stopper
+ def __init__(self, patience=30):
+ self.best_fitness = 0.0 # i.e. mAP
+ self.best_epoch = 0
+ self.patience = patience or float('inf') # epochs to wait after fitness stops improving to stop
+ self.possible_stop = False # possible stop may occur next epoch
+
+ def __call__(self, epoch, fitness):
+ if fitness >= self.best_fitness: # >= 0 to allow for early zero-fitness stage of training
+ self.best_epoch = epoch
+ self.best_fitness = fitness
+ delta = epoch - self.best_epoch # epochs without improvement
+ self.possible_stop = delta >= (self.patience - 1) # possible stop may occur next epoch
+ stop = delta >= self.patience # stop training if patience exceeded
+ if stop:
+ LOGGER.info(f'Stopping training early as no improvement observed in last {self.patience} epochs. '
+ f'Best results observed at epoch {self.best_epoch}, best model saved as best.pt.\n'
+ f'To update EarlyStopping(patience={self.patience}) pass a new patience value, '
+ f'i.e. `python train.py --patience 300` or use `--patience 0` to disable EarlyStopping.')
+ return stop
+
+
+class ModelEMA:
+ """ Updated Exponential Moving Average (EMA) from https://github.com/rwightman/pytorch-image-models
+ Keeps a moving average of everything in the model state_dict (parameters and buffers)
+ For EMA details see https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
+ """
+
+ def __init__(self, model, decay=0.9999, tau=2000, updates=0):
+ # Create EMA
+ self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA
+ self.updates = updates # number of EMA updates
+ self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)
+ for p in self.ema.parameters():
+ p.requires_grad_(False)
+
+ def update(self, model):
+ # Update EMA parameters
+ self.updates += 1
+ d = self.decay(self.updates)
+
+ msd = de_parallel(model).state_dict() # model state_dict
+ for k, v in self.ema.state_dict().items():
+ if v.dtype.is_floating_point: # true for FP16 and FP32
+ v *= d
+ v += (1 - d) * msd[k].detach()
+ # assert v.dtype == msd[k].dtype == torch.float32, f'{k}: EMA {v.dtype} and model {msd[k].dtype} must be FP32'
+
+ def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
+ # Update EMA attributes
+ copy_attr(self.ema, model, include, exclude)
diff --git a/ipex/seg/val.py b/ipex/seg/val.py
new file mode 100644
index 000000000..ebe6aff3b
--- /dev/null
+++ b/ipex/seg/val.py
@@ -0,0 +1,405 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a trained YOLOv5 detection model on a detection dataset
+
+Usage:
+ $ python val.py --weights yolov5s.pt --data coco128.yaml --img 640
+
+Usage - formats:
+ $ python val.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import json
+import os
+import sys
+from pathlib import Path
+
+import numpy as np
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.callbacks import Callbacks
+from utils.dataloaders import create_dataloader
+from utils.general import (LOGGER, Profile, check_dataset, check_img_size, check_requirements, check_yaml,
+ coco80_to_coco91_class, colorstr, increment_path, non_max_suppression, print_args,
+ scale_coords, xywh2xyxy, xyxy2xywh)
+from utils.metrics import ConfusionMatrix, ap_per_class, box_iou
+from utils.plots import output_to_target, plot_images, plot_val_study
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+def save_one_txt(predn, save_conf, shape, file):
+ # Save one txt result
+ gn = torch.tensor(shape)[[1, 0, 1, 0]] # normalization gain whwh
+ for *xyxy, conf, cls in predn.tolist():
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(file, 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+
+def save_one_json(predn, jdict, path, class_map):
+ # Save one JSON result {"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}
+ image_id = int(path.stem) if path.stem.isnumeric() else path.stem
+ box = xyxy2xywh(predn[:, :4]) # xywh
+ box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
+ for p, b in zip(predn.tolist(), box.tolist()):
+ jdict.append({
+ 'image_id': image_id,
+ 'category_id': class_map[int(p[5])],
+ 'bbox': [round(x, 3) for x in b],
+ 'score': round(p[4], 5)})
+
+
+def process_batch(detections, labels, iouv):
+ """
+ Return correct prediction matrix
+ Arguments:
+ detections (array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ correct (array[N, 10]), for 10 IoU levels
+ """
+ correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+ correct_class = labels[:, 0:1] == detections[:, 5]
+ for i in range(len(iouv)):
+ x = torch.where((iou >= iouv[i]) & correct_class) # IoU > threshold and classes match
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detect, iou]
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ # matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ correct[matches[:, 1].astype(int), i] = True
+ return torch.tensor(correct, dtype=torch.bool, device=iouv.device)
+
+
+@smart_inference_mode()
+def run(
+ data,
+ weights=None, # model.pt path(s)
+ batch_size=32, # batch size
+ imgsz=640, # inference size (pixels)
+ conf_thres=0.001, # confidence threshold
+ iou_thres=0.6, # NMS IoU threshold
+ max_det=300, # maximum detections per image
+ task='val', # train, val, test, speed or study
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ workers=8, # max dataloader workers (per RANK in DDP mode)
+ single_cls=False, # treat as single-class dataset
+ augment=False, # augmented inference
+ verbose=False, # verbose output
+ save_txt=False, # save results to *.txt
+ save_hybrid=False, # save label+prediction hybrid results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_json=False, # save a COCO-JSON results file
+ project=ROOT / 'runs/val', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=True, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ model=None,
+ dataloader=None,
+ save_dir=Path(''),
+ plots=True,
+ callbacks=Callbacks(),
+ compute_loss=None,
+):
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ model.half() if half else model.float()
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ if engine:
+ batch_size = model.batch_size
+ else:
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
+
+ # Data
+ data = check_dataset(data) # check
+
+ # Configure
+ model.eval()
+ cuda = device.type != 'cpu'
+ is_coco = isinstance(data.get('val'), str) and data['val'].endswith(f'coco{os.sep}val2017.txt') # COCO dataset
+ nc = 1 if single_cls else int(data['nc']) # number of classes
+ iouv = torch.linspace(0.5, 0.95, 10, device=device) # iou vector for mAP@0.5:0.95
+ niou = iouv.numel()
+
+ # Dataloader
+ if not training:
+ if pt and not single_cls: # check --weights are trained on --data
+ ncm = model.model.nc
+ assert ncm == nc, f'{weights} ({ncm} classes) trained on different --data than what you passed ({nc} ' \
+ f'classes). Pass correct combination of --weights and --data that are trained together.'
+ model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
+ pad = 0.0 if task in ('speed', 'benchmark') else 0.5
+ rect = False if task == 'benchmark' else pt # square inference for benchmarks
+ task = task if task in ('train', 'val', 'test') else 'val' # path to train/val/test images
+ dataloader = create_dataloader(data[task],
+ imgsz,
+ batch_size,
+ stride,
+ single_cls,
+ pad=pad,
+ rect=rect,
+ workers=workers,
+ prefix=colorstr(f'{task}: '))[0]
+
+ seen = 0
+ confusion_matrix = ConfusionMatrix(nc=nc)
+ names = model.names if hasattr(model, 'names') else model.module.names # get class names
+ if isinstance(names, (list, tuple)): # old format
+ names = dict(enumerate(names))
+ class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
+ s = ('%22s' + '%11s' * 6) % ('Class', 'Images', 'Instances', 'P', 'R', 'mAP50', 'mAP50-95')
+ dt, p, r, f1, mp, mr, map50, map = (Profile(), Profile(), Profile()), 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
+ loss = torch.zeros(3, device=device)
+ jdict, stats, ap, ap_class = [], [], [], []
+ callbacks.run('on_val_start')
+ pbar = tqdm(dataloader, desc=s, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ for batch_i, (im, targets, paths, shapes) in enumerate(pbar):
+ callbacks.run('on_val_batch_start')
+ with dt[0]:
+ if cuda:
+ im = im.to(device, non_blocking=True)
+ targets = targets.to(device)
+ im = im.half() if half else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ nb, _, height, width = im.shape # batch size, channels, height, width
+
+ # Inference
+ with dt[1]:
+ out, train_out = model(im) if training else model(im, augment=augment, val=True) # inference, loss outputs
+
+ # Loss
+ if compute_loss:
+ loss += compute_loss([x.float() for x in train_out], targets)[1] # box, obj, cls
+
+ # NMS
+ targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
+ lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
+ with dt[2]:
+ out = non_max_suppression(out,
+ conf_thres,
+ iou_thres,
+ labels=lb,
+ multi_label=True,
+ agnostic=single_cls,
+ max_det=max_det)
+
+ # Metrics
+ for si, pred in enumerate(out):
+ labels = targets[targets[:, 0] == si, 1:]
+ nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
+ path, shape = Path(paths[si]), shapes[si][0]
+ correct = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
+ seen += 1
+
+ if npr == 0:
+ if nl:
+ stats.append((correct, *torch.zeros((2, 0), device=device), labels[:, 0]))
+ if plots:
+ confusion_matrix.process_batch(detections=None, labels=labels[:, 0])
+ continue
+
+ # Predictions
+ if single_cls:
+ pred[:, 5] = 0
+ predn = pred.clone()
+ scale_coords(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
+
+ # Evaluate
+ if nl:
+ tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
+ scale_coords(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
+ labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
+ correct = process_batch(predn, labelsn, iouv)
+ if plots:
+ confusion_matrix.process_batch(predn, labelsn)
+ stats.append((correct, pred[:, 4], pred[:, 5], labels[:, 0])) # (correct, conf, pcls, tcls)
+
+ # Save/log
+ if save_txt:
+ save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / f'{path.stem}.txt')
+ if save_json:
+ save_one_json(predn, jdict, path, class_map) # append to COCO-JSON dictionary
+ callbacks.run('on_val_image_end', pred, predn, path, names, im[si])
+
+ # Plot images
+ if plots and batch_i < 3:
+ plot_images(im, targets, paths, save_dir / f'val_batch{batch_i}_labels.jpg', names) # labels
+ plot_images(im, output_to_target(out), paths, save_dir / f'val_batch{batch_i}_pred.jpg', names) # pred
+
+ callbacks.run('on_val_batch_end')
+
+ # Compute metrics
+ stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
+ if len(stats) and stats[0].any():
+ tp, fp, p, r, f1, ap, ap_class = ap_per_class(*stats, plot=plots, save_dir=save_dir, names=names)
+ ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95
+ mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
+ nt = np.bincount(stats[3].astype(int), minlength=nc) # number of targets per class
+
+ # Print results
+ pf = '%22s' + '%11i' * 2 + '%11.3g' * 4 # print format
+ LOGGER.info(pf % ('all', seen, nt.sum(), mp, mr, map50, map))
+ if nt.sum() == 0:
+ LOGGER.warning(f'WARNING: no labels found in {task} set, can not compute metrics without labels ⚠️')
+
+ # Print results per class
+ if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
+ for i, c in enumerate(ap_class):
+ LOGGER.info(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
+
+ # Print speeds
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
+ if not training:
+ shape = (batch_size, 3, imgsz, imgsz)
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}' % t)
+
+ # Plots
+ if plots:
+ confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
+ callbacks.run('on_val_end')
+
+ # Save JSON
+ if save_json and len(jdict):
+ w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
+ anno_json = str(Path(data.get('path', '../coco')) / 'annotations/instances_val2017.json') # annotations json
+ pred_json = str(save_dir / f"{w}_predictions.json") # predictions json
+ LOGGER.info(f'\nEvaluating pycocotools mAP... saving {pred_json}...')
+ with open(pred_json, 'w') as f:
+ json.dump(jdict, f)
+
+ try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
+ check_requirements(['pycocotools'])
+ from pycocotools.coco import COCO
+ from pycocotools.cocoeval import COCOeval
+
+ anno = COCO(anno_json) # init annotations api
+ pred = anno.loadRes(pred_json) # init predictions api
+ eval = COCOeval(anno, pred, 'bbox')
+ if is_coco:
+ eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.im_files] # image IDs to evaluate
+ eval.evaluate()
+ eval.accumulate()
+ eval.summarize()
+ map, map50 = eval.stats[:2] # update results (mAP@0.5:0.95, mAP@0.5)
+ except Exception as e:
+ LOGGER.info(f'pycocotools unable to run: {e}')
+
+ # Return results
+ model.float() # for training
+ if not training:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ maps = np.zeros(nc) + map
+ for i, c in enumerate(ap_class):
+ maps[c] = ap[i]
+ return (mp, mr, map50, map, *(loss.cpu() / len(dataloader)).tolist()), maps, t
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)')
+ parser.add_argument('--batch-size', type=int, default=32, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=300, help='maximum detections per image')
+ parser.add_argument('--task', default='val', help='train, val, test, speed or study')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--verbose', action='store_true', help='report mAP by class')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-json', action='store_true', help='save a COCO-JSON results file')
+ parser.add_argument('--project', default=ROOT / 'runs/val', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.data = check_yaml(opt.data) # check YAML
+ opt.save_json |= opt.data.endswith('coco.yaml')
+ opt.save_txt |= opt.save_hybrid
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ #check_requirements(requirements=ROOT / 'requirements.txt', exclude=('tensorboard', 'thop'))
+
+ if opt.task in ('train', 'val', 'test'): # run normally
+ if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
+ LOGGER.info(f'WARNING: confidence threshold {opt.conf_thres} > 0.001 produces invalid results ⚠️')
+ if opt.save_hybrid:
+ LOGGER.info('WARNING: --save-hybrid will return high mAP from hybrid labels, not from predictions alone ⚠️')
+ run(**vars(opt))
+
+ else:
+ weights = opt.weights if isinstance(opt.weights, list) else [opt.weights]
+ opt.half = True # FP16 for fastest results
+ if opt.task == 'speed': # speed benchmarks
+ # python val.py --task speed --data coco.yaml --batch 1 --weights yolov5n.pt yolov5s.pt...
+ opt.conf_thres, opt.iou_thres, opt.save_json = 0.25, 0.45, False
+ for opt.weights in weights:
+ run(**vars(opt), plots=False)
+
+ elif opt.task == 'study': # speed vs mAP benchmarks
+ # python val.py --task study --data coco.yaml --iou 0.7 --weights yolov5n.pt yolov5s.pt...
+ for opt.weights in weights:
+ f = f'study_{Path(opt.data).stem}_{Path(opt.weights).stem}.txt' # filename to save to
+ x, y = list(range(256, 1536 + 128, 128)), [] # x axis (image sizes), y axis
+ for opt.imgsz in x: # img-size
+ LOGGER.info(f'\nRunning {f} --imgsz {opt.imgsz}...')
+ r, _, t = run(**vars(opt), plots=False)
+ y.append(r + t) # results and times
+ np.savetxt(f, y, fmt='%10.4g') # save
+ os.system('zip -r study.zip study_*.txt')
+ plot_val_study(x=x) # plot
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/ipex/test.py b/ipex/test.py
new file mode 100644
index 000000000..17b48060b
--- /dev/null
+++ b/ipex/test.py
@@ -0,0 +1,353 @@
+import argparse
+import json
+import os
+from pathlib import Path
+from threading import Thread
+
+import numpy as np
+import torch
+import yaml
+from tqdm import tqdm
+
+from models.experimental import attempt_load
+from utils.datasets import create_dataloader
+from utils.general import coco80_to_coco91_class, check_dataset, check_file, check_img_size, check_requirements, \
+ box_iou, non_max_suppression, scale_coords, xyxy2xywh, xywh2xyxy, set_logging, increment_path, colorstr
+from utils.metrics import ap_per_class, ConfusionMatrix
+from utils.plots import plot_images, output_to_target, plot_study_txt
+from utils.torch_utils import select_device, time_synchronized, TracedModel
+
+
+def test(data,
+ weights=None,
+ batch_size=32,
+ imgsz=640,
+ conf_thres=0.001,
+ iou_thres=0.6, # for NMS
+ save_json=False,
+ single_cls=False,
+ augment=False,
+ verbose=False,
+ model=None,
+ dataloader=None,
+ save_dir=Path(''), # for saving images
+ save_txt=False, # for auto-labelling
+ save_hybrid=False, # for hybrid auto-labelling
+ save_conf=False, # save auto-label confidences
+ plots=True,
+ wandb_logger=None,
+ compute_loss=None,
+ half_precision=True,
+ trace=False,
+ is_coco=False,
+ v5_metric=False):
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device = next(model.parameters()).device # get model device
+
+ else: # called directly
+ set_logging()
+ device = select_device(opt.device, batch_size=batch_size)
+
+ # Directories
+ save_dir = Path(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok)) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = attempt_load(weights, map_location=device) # load FP32 model
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ imgsz = check_img_size(imgsz, s=gs) # check img_size
+
+ if trace:
+ model = TracedModel(model, device, imgsz)
+
+ # Half
+ half = device.type != 'cpu' and half_precision # half precision only supported on CUDA
+ if half:
+ model.half()
+
+ # Configure
+ model.eval()
+ if isinstance(data, str):
+ is_coco = data.endswith('coco.yaml')
+ with open(data) as f:
+ data = yaml.load(f, Loader=yaml.SafeLoader)
+ check_dataset(data) # check
+ nc = 1 if single_cls else int(data['nc']) # number of classes
+ iouv = torch.linspace(0.5, 0.95, 10).to(device) # iou vector for mAP@0.5:0.95
+ niou = iouv.numel()
+
+ # Logging
+ log_imgs = 0
+ if wandb_logger and wandb_logger.wandb:
+ log_imgs = min(wandb_logger.log_imgs, 100)
+ # Dataloader
+ if not training:
+ if device.type != 'cpu':
+ model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
+ task = opt.task if opt.task in ('train', 'val', 'test') else 'val' # path to train/val/test images
+ dataloader = create_dataloader(data[task], imgsz, batch_size, gs, opt, pad=0.5, rect=True,
+ prefix=colorstr(f'{task}: '))[0]
+
+ if v5_metric:
+ print("Testing with YOLOv5 AP metric...")
+
+ seen = 0
+ confusion_matrix = ConfusionMatrix(nc=nc)
+ names = {k: v for k, v in enumerate(model.names if hasattr(model, 'names') else model.module.names)}
+ coco91class = coco80_to_coco91_class()
+ s = ('%20s' + '%12s' * 6) % ('Class', 'Images', 'Labels', 'P', 'R', 'mAP@.5', 'mAP@.5:.95')
+ p, r, f1, mp, mr, map50, map, t0, t1 = 0., 0., 0., 0., 0., 0., 0., 0., 0.
+ loss = torch.zeros(3, device=device)
+ jdict, stats, ap, ap_class, wandb_images = [], [], [], [], []
+ for batch_i, (img, targets, paths, shapes) in enumerate(tqdm(dataloader, desc=s)):
+ img = img.to(device, non_blocking=True)
+ img = img.half() if half else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ targets = targets.to(device)
+ nb, _, height, width = img.shape # batch size, channels, height, width
+
+ with torch.no_grad():
+ # Run model
+ t = time_synchronized()
+ out, train_out = model(img, augment=augment) # inference and training outputs
+ t0 += time_synchronized() - t
+
+ # Compute loss
+ if compute_loss:
+ loss += compute_loss([x.float() for x in train_out], targets)[1][:3] # box, obj, cls
+
+ # Run NMS
+ targets[:, 2:] *= torch.Tensor([width, height, width, height]).to(device) # to pixels
+ lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
+ t = time_synchronized()
+ out = non_max_suppression(out, conf_thres=conf_thres, iou_thres=iou_thres, labels=lb, multi_label=True)
+ t1 += time_synchronized() - t
+
+ # Statistics per image
+ for si, pred in enumerate(out):
+ labels = targets[targets[:, 0] == si, 1:]
+ nl = len(labels)
+ tcls = labels[:, 0].tolist() if nl else [] # target class
+ path = Path(paths[si])
+ seen += 1
+
+ if len(pred) == 0:
+ if nl:
+ stats.append((torch.zeros(0, niou, dtype=torch.bool), torch.Tensor(), torch.Tensor(), tcls))
+ continue
+
+ # Predictions
+ predn = pred.clone()
+ scale_coords(img[si].shape[1:], predn[:, :4], shapes[si][0], shapes[si][1]) # native-space pred
+
+ # Append to text file
+ if save_txt:
+ gn = torch.tensor(shapes[si][0])[[1, 0, 1, 0]] # normalization gain whwh
+ for *xyxy, conf, cls in predn.tolist():
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(save_dir / 'labels' / (path.stem + '.txt'), 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+ # W&B logging - Media Panel Plots
+ if len(wandb_images) < log_imgs and wandb_logger.current_epoch > 0: # Check for test operation
+ if wandb_logger.current_epoch % wandb_logger.bbox_interval == 0:
+ box_data = [{"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": "%s %.3f" % (names[cls], conf),
+ "scores": {"class_score": conf},
+ "domain": "pixel"} for *xyxy, conf, cls in pred.tolist()]
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ wandb_images.append(wandb_logger.wandb.Image(img[si], boxes=boxes, caption=path.name))
+ wandb_logger.log_training_progress(predn, path, names) if wandb_logger and wandb_logger.wandb_run else None
+
+ # Append to pycocotools JSON dictionary
+ if save_json:
+ # [{"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}, ...
+ image_id = int(path.stem) if path.stem.isnumeric() else path.stem
+ box = xyxy2xywh(predn[:, :4]) # xywh
+ box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
+ for p, b in zip(pred.tolist(), box.tolist()):
+ jdict.append({'image_id': image_id,
+ 'category_id': coco91class[int(p[5])] if is_coco else int(p[5]),
+ 'bbox': [round(x, 3) for x in b],
+ 'score': round(p[4], 5)})
+
+ # Assign all predictions as incorrect
+ correct = torch.zeros(pred.shape[0], niou, dtype=torch.bool, device=device)
+ if nl:
+ detected = [] # target indices
+ tcls_tensor = labels[:, 0]
+
+ # target boxes
+ tbox = xywh2xyxy(labels[:, 1:5])
+ scale_coords(img[si].shape[1:], tbox, shapes[si][0], shapes[si][1]) # native-space labels
+ if plots:
+ confusion_matrix.process_batch(predn, torch.cat((labels[:, 0:1], tbox), 1))
+
+ # Per target class
+ for cls in torch.unique(tcls_tensor):
+ ti = (cls == tcls_tensor).nonzero(as_tuple=False).view(-1) # prediction indices
+ pi = (cls == pred[:, 5]).nonzero(as_tuple=False).view(-1) # target indices
+
+ # Search for detections
+ if pi.shape[0]:
+ # Prediction to target ious
+ ious, i = box_iou(predn[pi, :4], tbox[ti]).max(1) # best ious, indices
+
+ # Append detections
+ detected_set = set()
+ for j in (ious > iouv[0]).nonzero(as_tuple=False):
+ d = ti[i[j]] # detected target
+ if d.item() not in detected_set:
+ detected_set.add(d.item())
+ detected.append(d)
+ correct[pi[j]] = ious[j] > iouv # iou_thres is 1xn
+ if len(detected) == nl: # all targets already located in image
+ break
+
+ # Append statistics (correct, conf, pcls, tcls)
+ stats.append((correct.cpu(), pred[:, 4].cpu(), pred[:, 5].cpu(), tcls))
+
+ # Plot images
+ if plots and batch_i < 3:
+ f = save_dir / f'test_batch{batch_i}_labels.jpg' # labels
+ Thread(target=plot_images, args=(img, targets, paths, f, names), daemon=True).start()
+ f = save_dir / f'test_batch{batch_i}_pred.jpg' # predictions
+ Thread(target=plot_images, args=(img, output_to_target(out), paths, f, names), daemon=True).start()
+
+ # Compute statistics
+ stats = [np.concatenate(x, 0) for x in zip(*stats)] # to numpy
+ if len(stats) and stats[0].any():
+ p, r, ap, f1, ap_class = ap_per_class(*stats, plot=plots, v5_metric=v5_metric, save_dir=save_dir, names=names)
+ ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95
+ mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
+ nt = np.bincount(stats[3].astype(np.int64), minlength=nc) # number of targets per class
+ else:
+ nt = torch.zeros(1)
+
+ # Print results
+ pf = '%20s' + '%12i' * 2 + '%12.3g' * 4 # print format
+ print(pf % ('all', seen, nt.sum(), mp, mr, map50, map))
+
+ # Print results per class
+ if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
+ for i, c in enumerate(ap_class):
+ print(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
+
+ # Print speeds
+ t = tuple(x / seen * 1E3 for x in (t0, t1, t0 + t1)) + (imgsz, imgsz, batch_size) # tuple
+ if not training:
+ print('Speed: %.1f/%.1f/%.1f ms inference/NMS/total per %gx%g image at batch-size %g' % t)
+
+ # Plots
+ if plots:
+ confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
+ if wandb_logger and wandb_logger.wandb:
+ val_batches = [wandb_logger.wandb.Image(str(f), caption=f.name) for f in sorted(save_dir.glob('test*.jpg'))]
+ wandb_logger.log({"Validation": val_batches})
+ if wandb_images:
+ wandb_logger.log({"Bounding Box Debugger/Images": wandb_images})
+
+ # Save JSON
+ if save_json and len(jdict):
+ w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
+ anno_json = './coco/annotations/instances_val2017.json' # annotations json
+ pred_json = str(save_dir / f"{w}_predictions.json") # predictions json
+ print('\nEvaluating pycocotools mAP... saving %s...' % pred_json)
+ with open(pred_json, 'w') as f:
+ json.dump(jdict, f)
+
+ try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
+ from pycocotools.coco import COCO
+ from pycocotools.cocoeval import COCOeval
+
+ anno = COCO(anno_json) # init annotations api
+ pred = anno.loadRes(pred_json) # init predictions api
+ eval = COCOeval(anno, pred, 'bbox')
+ if is_coco:
+ eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.img_files] # image IDs to evaluate
+ eval.evaluate()
+ eval.accumulate()
+ eval.summarize()
+ map, map50 = eval.stats[:2] # update results (mAP@0.5:0.95, mAP@0.5)
+ except Exception as e:
+ print(f'pycocotools unable to run: {e}')
+
+ # Return results
+ model.float() # for training
+ if not training:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ print(f"Results saved to {save_dir}{s}")
+ maps = np.zeros(nc) + map
+ for i, c in enumerate(ap_class):
+ maps[c] = ap[i]
+ return (mp, mr, map50, map, *(loss.cpu() / len(dataloader)).tolist()), maps, t
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser(prog='test.py')
+ parser.add_argument('--weights', nargs='+', type=str, default='yolov7.pt', help='model.pt path(s)')
+ parser.add_argument('--data', type=str, default='data/coco.yaml', help='*.data path')
+ parser.add_argument('--batch-size', type=int, default=32, help='size of each image batch')
+ parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--conf-thres', type=float, default=0.001, help='object confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.65, help='IOU threshold for NMS')
+ parser.add_argument('--task', default='val', help='train, val, test, speed or study')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--verbose', action='store_true', help='report mAP by class')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-json', action='store_true', help='save a cocoapi-compatible JSON results file')
+ parser.add_argument('--project', default='runs/test', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--no-trace', action='store_true', help='don`t trace model')
+ parser.add_argument('--v5-metric', action='store_true', help='assume maximum recall as 1.0 in AP calculation')
+ opt = parser.parse_args()
+ opt.save_json |= opt.data.endswith('coco.yaml')
+ opt.data = check_file(opt.data) # check file
+ print(opt)
+ #check_requirements()
+
+ if opt.task in ('train', 'val', 'test'): # run normally
+ test(opt.data,
+ opt.weights,
+ opt.batch_size,
+ opt.img_size,
+ opt.conf_thres,
+ opt.iou_thres,
+ opt.save_json,
+ opt.single_cls,
+ opt.augment,
+ opt.verbose,
+ save_txt=opt.save_txt | opt.save_hybrid,
+ save_hybrid=opt.save_hybrid,
+ save_conf=opt.save_conf,
+ trace=not opt.no_trace,
+ v5_metric=opt.v5_metric
+ )
+
+ elif opt.task == 'speed': # speed benchmarks
+ for w in opt.weights:
+ test(opt.data, w, opt.batch_size, opt.img_size, 0.25, 0.45, save_json=False, plots=False, v5_metric=opt.v5_metric)
+
+ elif opt.task == 'study': # run over a range of settings and save/plot
+ # python test.py --task study --data coco.yaml --iou 0.65 --weights yolov7.pt
+ x = list(range(256, 1536 + 128, 128)) # x axis (image sizes)
+ for w in opt.weights:
+ f = f'study_{Path(opt.data).stem}_{Path(w).stem}.txt' # filename to save to
+ y = [] # y axis
+ for i in x: # img-size
+ print(f'\nRunning {f} point {i}...')
+ r, _, t = test(opt.data, w, opt.batch_size, i, opt.conf_thres, opt.iou_thres, opt.save_json,
+ plots=False, v5_metric=opt.v5_metric)
+ y.append(r + t) # results and times
+ np.savetxt(f, y, fmt='%10.4g') # save
+ os.system('zip -r study.zip study_*.txt')
+ plot_study_txt(x=x) # plot
diff --git a/ipex/train.py b/ipex/train.py
new file mode 100644
index 000000000..418edaf69
--- /dev/null
+++ b/ipex/train.py
@@ -0,0 +1,707 @@
+import argparse
+import logging
+import math
+import os
+import random
+import time
+from copy import deepcopy
+from pathlib import Path
+from threading import Thread
+
+import numpy as np
+import torch.distributed as dist
+import torch.nn as nn
+import torch.nn.functional as F
+import torch.optim as optim
+import torch.optim.lr_scheduler as lr_scheduler
+import torch.utils.data
+import yaml
+from torch.cuda import amp
+from torch.nn.parallel import DistributedDataParallel as DDP
+from torch.utils.tensorboard import SummaryWriter
+from tqdm import tqdm
+
+import test # import test.py to get mAP after each epoch
+from models.experimental import attempt_load
+from models.yolo import Model
+from utils.autoanchor import check_anchors
+from utils.datasets import create_dataloader
+from utils.general import labels_to_class_weights, increment_path, labels_to_image_weights, init_seeds, \
+ fitness, strip_optimizer, get_latest_run, check_dataset, check_file, check_git_status, check_img_size, \
+ check_requirements, print_mutation, set_logging, one_cycle, colorstr
+from utils.google_utils import attempt_download
+from utils.loss import ComputeLoss, ComputeLossOTA
+from utils.plots import plot_images, plot_labels, plot_results, plot_evolution
+from utils.torch_utils import ModelEMA, select_device, intersect_dicts, torch_distributed_zero_first, is_parallel
+from utils.wandb_logging.wandb_utils import WandbLogger, check_wandb_resume
+import intel_extension_for_pytorch as ipex
+
+logger = logging.getLogger(__name__)
+
+
+def train(hyp, opt, device, tb_writer=None):
+ logger.info(colorstr('hyperparameters: ') + ', '.join(f'{k}={v}' for k, v in hyp.items()))
+ save_dir, epochs, batch_size, total_batch_size, weights, rank, freeze = \
+ Path(opt.save_dir), opt.epochs, opt.batch_size, opt.total_batch_size, opt.weights, opt.global_rank, opt.freeze
+
+ # Directories
+ wdir = save_dir / 'weights'
+ wdir.mkdir(parents=True, exist_ok=True) # make dir
+ last = wdir / 'last.pt'
+ best = wdir / 'best.pt'
+ results_file = save_dir / 'results.txt'
+
+ # Save run settings
+ with open(save_dir / 'hyp.yaml', 'w') as f:
+ yaml.dump(hyp, f, sort_keys=False)
+ with open(save_dir / 'opt.yaml', 'w') as f:
+ yaml.dump(vars(opt), f, sort_keys=False)
+
+ # Configure
+ plots = not opt.evolve # create plots
+ cuda = device.type != 'cpu'
+ init_seeds(2 + rank)
+ with open(opt.data) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ is_coco = opt.data.endswith('coco.yaml')
+
+ # Logging- Doing this before checking the dataset. Might update data_dict
+ loggers = {'wandb': None} # loggers dict
+ if rank in [-1, 0]:
+ opt.hyp = hyp # add hyperparameters
+ run_id = torch.load(weights, map_location=device).get('wandb_id') if weights.endswith('.pt') and os.path.isfile(weights) else None
+ wandb_logger = WandbLogger(opt, Path(opt.save_dir).stem, run_id, data_dict)
+ loggers['wandb'] = wandb_logger.wandb
+ data_dict = wandb_logger.data_dict
+ if wandb_logger.wandb:
+ weights, epochs, hyp = opt.weights, opt.epochs, opt.hyp # WandbLogger might update weights, epochs if resuming
+
+ nc = 1 if opt.single_cls else int(data_dict['nc']) # number of classes
+ names = ['item'] if opt.single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
+ assert len(names) == nc, '%g names found for nc=%g dataset in %s' % (len(names), nc, opt.data) # check
+
+ # Model
+ pretrained = weights.endswith('.pt')
+ if pretrained:
+ with torch_distributed_zero_first(rank):
+ attempt_download(weights) # download if not found locally
+ ckpt = torch.load(weights, map_location=device) # load checkpoint
+ model = Model(opt.cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ exclude = ['anchor'] if (opt.cfg or hyp.get('anchors')) and not opt.resume else [] # exclude keys
+ state_dict = ckpt['model'].float().state_dict() # to FP32
+ state_dict = intersect_dicts(state_dict, model.state_dict(), exclude=exclude) # intersect
+ model.load_state_dict(state_dict, strict=False) # load
+ logger.info('Transferred %g/%g items from %s' % (len(state_dict), len(model.state_dict()), weights)) # report
+ else:
+ model = Model(opt.cfg, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ with torch_distributed_zero_first(rank):
+ check_dataset(data_dict) # check
+ train_path = data_dict['train']
+ test_path = data_dict['val']
+
+ # Freeze
+ freeze = [f'model.{x}.' for x in (freeze if len(freeze) > 1 else range(freeze[0]))] # parameter names to freeze (full or partial)
+ for k, v in model.named_parameters():
+ v.requires_grad = True # train all layers
+ if any(x in k for x in freeze):
+ print('freezing %s' % k)
+ v.requires_grad = False
+
+ # Optimizer
+ nbs = 64 # nominal batch size
+ accumulate = max(round(nbs / total_batch_size), 1) # accumulate loss before optimizing
+ hyp['weight_decay'] *= total_batch_size * accumulate / nbs # scale weight_decay
+ logger.info(f"Scaled weight_decay = {hyp['weight_decay']}")
+
+ pg0, pg1, pg2 = [], [], [] # optimizer parameter groups
+ for k, v in model.named_modules():
+ if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter):
+ pg2.append(v.bias) # biases
+ if isinstance(v, nn.BatchNorm2d):
+ pg0.append(v.weight) # no decay
+ elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter):
+ pg1.append(v.weight) # apply decay
+ if hasattr(v, 'im'):
+ if hasattr(v.im, 'implicit'):
+ pg0.append(v.im.implicit)
+ else:
+ for iv in v.im:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'imc'):
+ if hasattr(v.imc, 'implicit'):
+ pg0.append(v.imc.implicit)
+ else:
+ for iv in v.imc:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'imb'):
+ if hasattr(v.imb, 'implicit'):
+ pg0.append(v.imb.implicit)
+ else:
+ for iv in v.imb:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'imo'):
+ if hasattr(v.imo, 'implicit'):
+ pg0.append(v.imo.implicit)
+ else:
+ for iv in v.imo:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'ia'):
+ if hasattr(v.ia, 'implicit'):
+ pg0.append(v.ia.implicit)
+ else:
+ for iv in v.ia:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'attn'):
+ if hasattr(v.attn, 'logit_scale'):
+ pg0.append(v.attn.logit_scale)
+ if hasattr(v.attn, 'q_bias'):
+ pg0.append(v.attn.q_bias)
+ if hasattr(v.attn, 'v_bias'):
+ pg0.append(v.attn.v_bias)
+ if hasattr(v.attn, 'relative_position_bias_table'):
+ pg0.append(v.attn.relative_position_bias_table)
+ if hasattr(v, 'rbr_dense'):
+ if hasattr(v.rbr_dense, 'weight_rbr_origin'):
+ pg0.append(v.rbr_dense.weight_rbr_origin)
+ if hasattr(v.rbr_dense, 'weight_rbr_avg_conv'):
+ pg0.append(v.rbr_dense.weight_rbr_avg_conv)
+ if hasattr(v.rbr_dense, 'weight_rbr_pfir_conv'):
+ pg0.append(v.rbr_dense.weight_rbr_pfir_conv)
+ if hasattr(v.rbr_dense, 'weight_rbr_1x1_kxk_idconv1'):
+ pg0.append(v.rbr_dense.weight_rbr_1x1_kxk_idconv1)
+ if hasattr(v.rbr_dense, 'weight_rbr_1x1_kxk_conv2'):
+ pg0.append(v.rbr_dense.weight_rbr_1x1_kxk_conv2)
+ if hasattr(v.rbr_dense, 'weight_rbr_gconv_dw'):
+ pg0.append(v.rbr_dense.weight_rbr_gconv_dw)
+ if hasattr(v.rbr_dense, 'weight_rbr_gconv_pw'):
+ pg0.append(v.rbr_dense.weight_rbr_gconv_pw)
+ if hasattr(v.rbr_dense, 'vector'):
+ pg0.append(v.rbr_dense.vector)
+
+ if opt.adam:
+ optimizer = optim.Adam(pg0, lr=hyp['lr0'], betas=(hyp['momentum'], 0.999)) # adjust beta1 to momentum
+ else:
+ optimizer = optim.SGD(pg0, lr=hyp['lr0'], momentum=hyp['momentum'], nesterov=True)
+
+ optimizer.add_param_group({'params': pg1, 'weight_decay': hyp['weight_decay']}) # add pg1 with weight_decay
+ optimizer.add_param_group({'params': pg2}) # add pg2 (biases)
+ logger.info('Optimizer groups: %g .bias, %g conv.weight, %g other' % (len(pg2), len(pg1), len(pg0)))
+ del pg0, pg1, pg2
+
+ # Scheduler https://arxiv.org/pdf/1812.01187.pdf
+ # https://pytorch.org/docs/stable/_modules/torch/optim/lr_scheduler.html#OneCycleLR
+ if opt.linear_lr:
+ lf = lambda x: (1 - x / (epochs - 1)) * (1.0 - hyp['lrf']) + hyp['lrf'] # linear
+ else:
+ lf = one_cycle(1, hyp['lrf'], epochs) # cosine 1->hyp['lrf']
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
+ # plot_lr_scheduler(optimizer, scheduler, epochs)
+
+ # EMA
+ ema = ModelEMA(model) if rank in [-1, 0] else None
+
+ # Resume
+ start_epoch, best_fitness = 0, 0.0
+ if pretrained:
+ # Optimizer
+ if ckpt['optimizer'] is not None:
+ optimizer.load_state_dict(ckpt['optimizer'])
+ best_fitness = ckpt['best_fitness']
+
+ # EMA
+ if ema and ckpt.get('ema'):
+ ema.ema.load_state_dict(ckpt['ema'].float().state_dict())
+ ema.updates = ckpt['updates']
+
+ # Results
+ if ckpt.get('training_results') is not None:
+ results_file.write_text(ckpt['training_results']) # write results.txt
+
+ # Epochs
+ start_epoch = ckpt['epoch'] + 1
+ if opt.resume:
+ assert start_epoch > 0, '%s training to %g epochs is finished, nothing to resume.' % (weights, epochs)
+ if epochs < start_epoch:
+ logger.info('%s has been trained for %g epochs. Fine-tuning for %g additional epochs.' %
+ (weights, ckpt['epoch'], epochs))
+ epochs += ckpt['epoch'] # finetune additional epochs
+
+ del ckpt, state_dict
+
+ # Image sizes
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ nl = model.model[-1].nl # number of detection layers (used for scaling hyp['obj'])
+ imgsz, imgsz_test = [check_img_size(x, gs) for x in opt.img_size] # verify imgsz are gs-multiples
+
+ # DP mode
+ if cuda and rank == -1 and torch.cuda.device_count() > 1:
+ model = torch.nn.DataParallel(model)
+
+ # SyncBatchNorm
+ if opt.sync_bn and cuda and rank != -1:
+ model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
+ logger.info('Using SyncBatchNorm()')
+
+ # Trainloader
+ dataloader, dataset = create_dataloader(train_path, imgsz, batch_size, gs, opt,
+ hyp=hyp, augment=True, cache=opt.cache_images, rect=opt.rect, rank=rank,
+ world_size=opt.world_size, workers=opt.workers,
+ image_weights=opt.image_weights, quad=opt.quad, prefix=colorstr('train: '))
+ mlc = np.concatenate(dataset.labels, 0)[:, 0].max() # max label class
+ nb = len(dataloader) # number of batches
+ assert mlc < nc, 'Label class %g exceeds nc=%g in %s. Possible class labels are 0-%g' % (mlc, nc, opt.data, nc - 1)
+
+ # Process 0
+ if rank in [-1, 0]:
+ testloader = create_dataloader(test_path, imgsz_test, batch_size * 2, gs, opt, # testloader
+ hyp=hyp, cache=opt.cache_images and not opt.notest, rect=True, rank=-1,
+ world_size=opt.world_size, workers=opt.workers,
+ pad=0.5, prefix=colorstr('val: '))[0]
+
+ if not opt.resume:
+ labels = np.concatenate(dataset.labels, 0)
+ c = torch.tensor(labels[:, 0]) # classes
+ # cf = torch.bincount(c.long(), minlength=nc) + 1. # frequency
+ # model._initialize_biases(cf.to(device))
+ if plots:
+ #plot_labels(labels, names, save_dir, loggers)
+ if tb_writer:
+ tb_writer.add_histogram('classes', c, 0)
+
+ # Anchors
+ if not opt.noautoanchor:
+ check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz)
+ model.half().float() # pre-reduce anchor precision
+
+ # DDP mode
+ if cuda and rank != -1:
+ model = DDP(model, device_ids=[opt.local_rank], output_device=opt.local_rank,
+ # nn.MultiheadAttention incompatibility with DDP https://github.com/pytorch/pytorch/issues/26698
+ find_unused_parameters=any(isinstance(layer, nn.MultiheadAttention) for layer in model.modules()))
+
+ # Model parameters
+ hyp['box'] *= 3. / nl # scale to layers
+ hyp['cls'] *= nc / 80. * 3. / nl # scale to classes and layers
+ hyp['obj'] *= (imgsz / 640) ** 2 * 3. / nl # scale to image size and layers
+ hyp['label_smoothing'] = opt.label_smoothing
+ model.nc = nc # attach number of classes to model
+ model.hyp = hyp # attach hyperparameters to model
+ model.gr = 1.0 # iou loss ratio (obj_loss = 1.0 or iou)
+ model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
+ model.names = names
+
+ # Start training
+ t0 = time.time()
+ nw = max(round(hyp['warmup_epochs'] * nb), 1000) # number of warmup iterations, max(3 epochs, 1k iterations)
+ # nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
+ maps = np.zeros(nc) # mAP per class
+ results = (0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
+ scheduler.last_epoch = start_epoch - 1 # do not move
+ scaler = amp.GradScaler(enabled=cuda)
+ compute_loss_ota = ComputeLossOTA(model) # init loss class
+ compute_loss = ComputeLoss(model) # init loss class
+ logger.info(f'Image sizes {imgsz} train, {imgsz_test} test\n'
+ f'Using {dataloader.num_workers} dataloader workers\n'
+ f'Logging results to {save_dir}\n'
+ f'Starting training for {epochs} epochs...')
+ torch.save(model, wdir / 'init.pt')
+ for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
+ model, optimizer = ipex.optimize(model, optimizer=optimizer)
+ model.train()
+
+ # Update image weights (optional)
+ if opt.image_weights:
+ # Generate indices
+ if rank in [-1, 0]:
+ cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
+ iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
+ dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
+ # Broadcast if DDP
+ if rank != -1:
+ indices = (torch.tensor(dataset.indices) if rank == 0 else torch.zeros(dataset.n)).int()
+ dist.broadcast(indices, 0)
+ if rank != 0:
+ dataset.indices = indices.cpu().numpy()
+
+ # Update mosaic border
+ # b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
+ # dataset.mosaic_border = [b - imgsz, -b] # height, width borders
+
+ mloss = torch.zeros(4, device=device) # mean losses
+ if rank != -1:
+ dataloader.sampler.set_epoch(epoch)
+ pbar = enumerate(dataloader)
+ logger.info(('\n' + '%10s' * 8) % ('Epoch', 'gpu_mem', 'box', 'obj', 'cls', 'total', 'labels', 'img_size'))
+ if rank in [-1, 0]:
+ pbar = tqdm(pbar, total=nb) # progress bar
+ optimizer.zero_grad()
+ for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
+ ni = i + nb * epoch # number integrated batches (since train start)
+ imgs = imgs.to(device, non_blocking=True).float() / 255.0 # uint8 to float32, 0-255 to 0.0-1.0
+
+ # Warmup
+ if ni <= nw:
+ xi = [0, nw] # x interp
+ # model.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
+ accumulate = max(1, np.interp(ni, xi, [1, nbs / total_batch_size]).round())
+ for j, x in enumerate(optimizer.param_groups):
+ # bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
+ x['lr'] = np.interp(ni, xi, [hyp['warmup_bias_lr'] if j == 2 else 0.0, x['initial_lr'] * lf(epoch)])
+ if 'momentum' in x:
+ x['momentum'] = np.interp(ni, xi, [hyp['warmup_momentum'], hyp['momentum']])
+
+ # Multi-scale
+ if opt.multi_scale:
+ sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
+ sf = sz / max(imgs.shape[2:]) # scale factor
+ if sf != 1:
+ ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
+ imgs = F.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)
+
+ # Forward
+ with amp.autocast(enabled=cuda):
+ pred = model(imgs) # forward
+ if 'loss_ota' not in hyp or hyp['loss_ota'] == 1:
+ loss, loss_items = compute_loss_ota(pred, targets.to(device), imgs) # loss scaled by batch_size
+ else:
+ loss, loss_items = compute_loss(pred, targets.to(device)) # loss scaled by batch_size
+ if rank != -1:
+ loss *= opt.world_size # gradient averaged between devices in DDP mode
+ if opt.quad:
+ loss *= 4.
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize
+ if ni % accumulate == 0:
+ scaler.step(optimizer) # optimizer.step
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+
+ # Print
+ if rank in [-1, 0]:
+ mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
+ mem = '%.3gG' % (torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0) # (GB)
+ s = ('%10s' * 2 + '%10.4g' * 6) % (
+ '%g/%g' % (epoch, epochs - 1), mem, *mloss, targets.shape[0], imgs.shape[-1])
+ pbar.set_description(s)
+
+ # Plot
+ if plots and ni < 10:
+ f = save_dir / f'train_batch{ni}.jpg' # filename
+ Thread(target=plot_images, args=(imgs, targets, paths, f), daemon=True).start()
+ # if tb_writer:
+ # tb_writer.add_image(f, result, dataformats='HWC', global_step=epoch)
+ # tb_writer.add_graph(torch.jit.trace(model, imgs, strict=False), []) # add model graph
+ elif plots and ni == 10 and wandb_logger.wandb:
+ wandb_logger.log({"Mosaics": [wandb_logger.wandb.Image(str(x), caption=x.name) for x in
+ save_dir.glob('train*.jpg') if x.exists()]})
+
+ # end batch ------------------------------------------------------------------------------------------------
+ # end epoch ----------------------------------------------------------------------------------------------------
+
+ # Scheduler
+ lr = [x['lr'] for x in optimizer.param_groups] # for tensorboard
+ scheduler.step()
+
+ # DDP process 0 or single-GPU
+ if rank in [-1, 0]:
+ # mAP
+ ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'gr', 'names', 'stride', 'class_weights'])
+ final_epoch = epoch + 1 == epochs
+ if not opt.notest or final_epoch: # Calculate mAP
+ wandb_logger.current_epoch = epoch + 1
+ results, maps, times = test.test(data_dict,
+ batch_size=batch_size * 2,
+ imgsz=imgsz_test,
+ model=ema.ema,
+ single_cls=opt.single_cls,
+ dataloader=testloader,
+ save_dir=save_dir,
+ verbose=nc < 50 and final_epoch,
+ plots=plots and final_epoch,
+ wandb_logger=wandb_logger,
+ compute_loss=compute_loss,
+ is_coco=is_coco,
+ v5_metric=opt.v5_metric)
+
+ # Write
+ with open(results_file, 'a') as f:
+ f.write(s + '%10.4g' * 7 % results + '\n') # append metrics, val_loss
+ if len(opt.name) and opt.bucket:
+ os.system('gsutil cp %s gs://%s/results/results%s.txt' % (results_file, opt.bucket, opt.name))
+
+ # Log
+ tags = ['train/box_loss', 'train/obj_loss', 'train/cls_loss', # train loss
+ 'metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/mAP_0.5:0.95',
+ 'val/box_loss', 'val/obj_loss', 'val/cls_loss', # val loss
+ 'x/lr0', 'x/lr1', 'x/lr2'] # params
+ for x, tag in zip(list(mloss[:-1]) + list(results) + lr, tags):
+ if tb_writer:
+ tb_writer.add_scalar(tag, x, epoch) # tensorboard
+ if wandb_logger.wandb:
+ wandb_logger.log({tag: x}) # W&B
+
+ # Update best mAP
+ fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
+ if fi > best_fitness:
+ best_fitness = fi
+ wandb_logger.end_epoch(best_result=best_fitness == fi)
+
+ # Save model
+ if (not opt.nosave) or (final_epoch and not opt.evolve): # if save
+ ckpt = {'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'training_results': results_file.read_text(),
+ 'model': deepcopy(model.module if is_parallel(model) else model).half(),
+ 'ema': deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': optimizer.state_dict(),
+ 'wandb_id': wandb_logger.wandb_run.id if wandb_logger.wandb else None}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fi:
+ torch.save(ckpt, best)
+ if (best_fitness == fi) and (epoch >= 200):
+ torch.save(ckpt, wdir / 'best_{:03d}.pt'.format(epoch))
+ if epoch == 0:
+ torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
+ elif ((epoch+1) % 25) == 0:
+ torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
+ elif epoch >= (epochs-5):
+ torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
+ if wandb_logger.wandb:
+ if ((epoch + 1) % opt.save_period == 0 and not final_epoch) and opt.save_period != -1:
+ wandb_logger.log_model(
+ last.parent, opt, epoch, fi, best_model=best_fitness == fi)
+ del ckpt
+
+ # end epoch ----------------------------------------------------------------------------------------------------
+ # end training
+ if rank in [-1, 0]:
+ # Plots
+ if plots:
+ plot_results(save_dir=save_dir) # save as results.png
+ if wandb_logger.wandb:
+ files = ['results.png', 'confusion_matrix.png', *[f'{x}_curve.png' for x in ('F1', 'PR', 'P', 'R')]]
+ wandb_logger.log({"Results": [wandb_logger.wandb.Image(str(save_dir / f), caption=f) for f in files
+ if (save_dir / f).exists()]})
+ # Test best.pt
+ logger.info('%g epochs completed in %.3f hours.\n' % (epoch - start_epoch + 1, (time.time() - t0) / 3600))
+ if opt.data.endswith('coco.yaml') and nc == 80: # if COCO
+ for m in (last, best) if best.exists() else (last): # speed, mAP tests
+ results, _, _ = test.test(opt.data,
+ batch_size=batch_size * 2,
+ imgsz=imgsz_test,
+ conf_thres=0.001,
+ iou_thres=0.7,
+ model=attempt_load(m, device).half(),
+ single_cls=opt.single_cls,
+ dataloader=testloader,
+ save_dir=save_dir,
+ save_json=True,
+ plots=False,
+ is_coco=is_coco,
+ v5_metric=opt.v5_metric)
+
+ # Strip optimizers
+ final = best if best.exists() else last # final model
+ for f in last, best:
+ if f.exists():
+ strip_optimizer(f) # strip optimizers
+ if opt.bucket:
+ os.system(f'gsutil cp {final} gs://{opt.bucket}/weights') # upload
+ if wandb_logger.wandb and not opt.evolve: # Log the stripped model
+ wandb_logger.wandb.log_artifact(str(final), type='model',
+ name='run_' + wandb_logger.wandb_run.id + '_model',
+ aliases=['last', 'best', 'stripped'])
+ wandb_logger.finish_run()
+ else:
+ dist.destroy_process_group()
+ torch.cuda.empty_cache()
+ return results
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default='yolo7.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default='data/coco.yaml', help='data.yaml path')
+ parser.add_argument('--hyp', type=str, default='data/hyp.scratch.p5.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300)
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs')
+ parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='[train, test] image sizes')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--notest', action='store_true', help='only test final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
+ parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--adam', action='store_true', help='use torch.optim.Adam() optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')
+ parser.add_argument('--workers', type=int, default=8, help='maximum number of dataloader workers')
+ parser.add_argument('--project', default='runs/train', help='save to project/name')
+ parser.add_argument('--entity', default=None, help='W&B entity')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--linear-lr', action='store_true', help='linear LR')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--upload_dataset', action='store_true', help='Upload dataset as W&B artifact table')
+ parser.add_argument('--bbox_interval', type=int, default=-1, help='Set bounding-box image logging interval for W&B')
+ parser.add_argument('--save_period', type=int, default=-1, help='Log model after every "save_period" epoch')
+ parser.add_argument('--artifact_alias', type=str, default="latest", help='version of dataset artifact to be used')
+ parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone of yolov7=50, first3=0 1 2')
+ parser.add_argument('--v5-metric', action='store_true', help='assume maximum recall as 1.0 in AP calculation')
+ opt = parser.parse_args()
+
+ # Set DDP variables
+ opt.world_size = int(os.environ['WORLD_SIZE']) if 'WORLD_SIZE' in os.environ else 1
+ opt.global_rank = int(os.environ['RANK']) if 'RANK' in os.environ else -1
+ set_logging(opt.global_rank)
+ #if opt.global_rank in [-1, 0]:
+ # check_git_status()
+ # check_requirements()
+
+ # Resume
+ wandb_run = check_wandb_resume(opt)
+ if opt.resume and not wandb_run: # resume an interrupted run
+ ckpt = opt.resume if isinstance(opt.resume, str) else get_latest_run() # specified or most recent path
+ assert os.path.isfile(ckpt), 'ERROR: --resume checkpoint does not exist'
+ apriori = opt.global_rank, opt.local_rank
+ with open(Path(ckpt).parent.parent / 'opt.yaml') as f:
+ opt = argparse.Namespace(**yaml.load(f, Loader=yaml.SafeLoader)) # replace
+ opt.cfg, opt.weights, opt.resume, opt.batch_size, opt.global_rank, opt.local_rank = '', ckpt, True, opt.total_batch_size, *apriori # reinstate
+ logger.info('Resuming training from %s' % ckpt)
+ else:
+ # opt.hyp = opt.hyp or ('hyp.finetune.yaml' if opt.weights else 'hyp.scratch.yaml')
+ opt.data, opt.cfg, opt.hyp = check_file(opt.data), check_file(opt.cfg), check_file(opt.hyp) # check files
+ assert len(opt.cfg) or len(opt.weights), 'either --cfg or --weights must be specified'
+ opt.img_size.extend([opt.img_size[-1]] * (2 - len(opt.img_size))) # extend to 2 sizes (train, test)
+ opt.name = 'evolve' if opt.evolve else opt.name
+ opt.save_dir = increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok | opt.evolve) # increment run
+
+ # DDP mode
+ opt.total_batch_size = opt.batch_size
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if opt.local_rank != -1:
+ assert torch.cuda.device_count() > opt.local_rank
+ torch.cuda.set_device(opt.local_rank)
+ device = torch.device('cuda', opt.local_rank)
+ dist.init_process_group(backend='nccl', init_method='env://') # distributed backend
+ assert opt.batch_size % opt.world_size == 0, '--batch-size must be multiple of CUDA device count'
+ opt.batch_size = opt.total_batch_size // opt.world_size
+
+ # Hyperparameters
+ with open(opt.hyp) as f:
+ hyp = yaml.load(f, Loader=yaml.SafeLoader) # load hyps
+
+ # Train
+ logger.info(opt)
+ if not opt.evolve:
+ tb_writer = None # init loggers
+ if opt.global_rank in [-1, 0]:
+ prefix = colorstr('tensorboard: ')
+ logger.info(f"{prefix}Start with 'tensorboard --logdir {opt.project}', view at http://localhost:6006/")
+ tb_writer = SummaryWriter(opt.save_dir) # Tensorboard
+ train(hyp, opt, device, tb_writer)
+
+ # Evolve hyperparameters (optional)
+ else:
+ # Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)
+ meta = {'lr0': (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
+ 'lrf': (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
+ 'momentum': (0.3, 0.6, 0.98), # SGD momentum/Adam beta1
+ 'weight_decay': (1, 0.0, 0.001), # optimizer weight decay
+ 'warmup_epochs': (1, 0.0, 5.0), # warmup epochs (fractions ok)
+ 'warmup_momentum': (1, 0.0, 0.95), # warmup initial momentum
+ 'warmup_bias_lr': (1, 0.0, 0.2), # warmup initial bias lr
+ 'box': (1, 0.02, 0.2), # box loss gain
+ 'cls': (1, 0.2, 4.0), # cls loss gain
+ 'cls_pw': (1, 0.5, 2.0), # cls BCELoss positive_weight
+ 'obj': (1, 0.2, 4.0), # obj loss gain (scale with pixels)
+ 'obj_pw': (1, 0.5, 2.0), # obj BCELoss positive_weight
+ 'iou_t': (0, 0.1, 0.7), # IoU training threshold
+ 'anchor_t': (1, 2.0, 8.0), # anchor-multiple threshold
+ 'anchors': (2, 2.0, 10.0), # anchors per output grid (0 to ignore)
+ 'fl_gamma': (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
+ 'hsv_h': (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
+ 'hsv_s': (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
+ 'hsv_v': (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)
+ 'degrees': (1, 0.0, 45.0), # image rotation (+/- deg)
+ 'translate': (1, 0.0, 0.9), # image translation (+/- fraction)
+ 'scale': (1, 0.0, 0.9), # image scale (+/- gain)
+ 'shear': (1, 0.0, 10.0), # image shear (+/- deg)
+ 'perspective': (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
+ 'flipud': (1, 0.0, 1.0), # image flip up-down (probability)
+ 'fliplr': (0, 0.0, 1.0), # image flip left-right (probability)
+ 'mosaic': (1, 0.0, 1.0), # image mixup (probability)
+ 'mixup': (1, 0.0, 1.0), # image mixup (probability)
+ 'copy_paste': (1, 0.0, 1.0), # segment copy-paste (probability)
+ 'paste_in': (1, 0.0, 1.0)} # segment copy-paste (probability)
+
+ with open(opt.hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ if 'anchors' not in hyp: # anchors commented in hyp.yaml
+ hyp['anchors'] = 3
+
+ assert opt.local_rank == -1, 'DDP mode not implemented for --evolve'
+ opt.notest, opt.nosave = True, True # only test/save final epoch
+ # ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
+ yaml_file = Path(opt.save_dir) / 'hyp_evolved.yaml' # save best result here
+ if opt.bucket:
+ os.system('gsutil cp gs://%s/evolve.txt .' % opt.bucket) # download evolve.txt if exists
+
+ for _ in range(300): # generations to evolve
+ if Path('evolve.txt').exists(): # if evolve.txt exists: select best hyps and mutate
+ # Select parent(s)
+ parent = 'single' # parent selection method: 'single' or 'weighted'
+ x = np.loadtxt('evolve.txt', ndmin=2)
+ n = min(5, len(x)) # number of previous results to consider
+ x = x[np.argsort(-fitness(x))][:n] # top n mutations
+ w = fitness(x) - fitness(x).min() # weights
+ if parent == 'single' or len(x) == 1:
+ # x = x[random.randint(0, n - 1)] # random selection
+ x = x[random.choices(range(n), weights=w)[0]] # weighted selection
+ elif parent == 'weighted':
+ x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
+
+ # Mutate
+ mp, s = 0.8, 0.2 # mutation probability, sigma
+ npr = np.random
+ npr.seed(int(time.time()))
+ g = np.array([x[0] for x in meta.values()]) # gains 0-1
+ ng = len(meta)
+ v = np.ones(ng)
+ while all(v == 1): # mutate until a change occurs (prevent duplicates)
+ v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
+ for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
+ hyp[k] = float(x[i + 7] * v[i]) # mutate
+
+ # Constrain to limits
+ for k, v in meta.items():
+ hyp[k] = max(hyp[k], v[1]) # lower limit
+ hyp[k] = min(hyp[k], v[2]) # upper limit
+ hyp[k] = round(hyp[k], 5) # significant digits
+
+ # Train mutation
+ results = train(hyp.copy(), opt, device)
+
+ # Write mutation results
+ print_mutation(hyp.copy(), results, yaml_file, opt.bucket)
+
+ # Plot results
+ plot_evolution(yaml_file)
+ print(f'Hyperparameter evolution complete. Best results saved as: {yaml_file}\n'
+ f'Command to train a new model with these hyperparameters: $ python train.py --hyp {yaml_file}')
diff --git a/ipex/train_aux.py b/ipex/train_aux.py
new file mode 100644
index 000000000..0e8053f85
--- /dev/null
+++ b/ipex/train_aux.py
@@ -0,0 +1,699 @@
+import argparse
+import logging
+import math
+import os
+import random
+import time
+from copy import deepcopy
+from pathlib import Path
+from threading import Thread
+
+import numpy as np
+import torch.distributed as dist
+import torch.nn as nn
+import torch.nn.functional as F
+import torch.optim as optim
+import torch.optim.lr_scheduler as lr_scheduler
+import torch.utils.data
+import yaml
+from torch.cuda import amp
+from torch.nn.parallel import DistributedDataParallel as DDP
+from torch.utils.tensorboard import SummaryWriter
+from tqdm import tqdm
+
+import test # import test.py to get mAP after each epoch
+from models.experimental import attempt_load
+from models.yolo import Model
+from utils.autoanchor import check_anchors
+from utils.datasets import create_dataloader
+from utils.general import labels_to_class_weights, increment_path, labels_to_image_weights, init_seeds, \
+ fitness, strip_optimizer, get_latest_run, check_dataset, check_file, check_git_status, check_img_size, \
+ check_requirements, print_mutation, set_logging, one_cycle, colorstr
+from utils.google_utils import attempt_download
+from utils.loss import ComputeLoss, ComputeLossAuxOTA
+from utils.plots import plot_images, plot_labels, plot_results, plot_evolution
+from utils.torch_utils import ModelEMA, select_device, intersect_dicts, torch_distributed_zero_first, is_parallel
+from utils.wandb_logging.wandb_utils import WandbLogger, check_wandb_resume
+
+logger = logging.getLogger(__name__)
+
+
+def train(hyp, opt, device, tb_writer=None):
+ logger.info(colorstr('hyperparameters: ') + ', '.join(f'{k}={v}' for k, v in hyp.items()))
+ save_dir, epochs, batch_size, total_batch_size, weights, rank = \
+ Path(opt.save_dir), opt.epochs, opt.batch_size, opt.total_batch_size, opt.weights, opt.global_rank
+
+ # Directories
+ wdir = save_dir / 'weights'
+ wdir.mkdir(parents=True, exist_ok=True) # make dir
+ last = wdir / 'last.pt'
+ best = wdir / 'best.pt'
+ results_file = save_dir / 'results.txt'
+
+ # Save run settings
+ with open(save_dir / 'hyp.yaml', 'w') as f:
+ yaml.dump(hyp, f, sort_keys=False)
+ with open(save_dir / 'opt.yaml', 'w') as f:
+ yaml.dump(vars(opt), f, sort_keys=False)
+
+ # Configure
+ plots = not opt.evolve # create plots
+ cuda = device.type != 'cpu'
+ init_seeds(2 + rank)
+ with open(opt.data) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ is_coco = opt.data.endswith('coco.yaml')
+
+ # Logging- Doing this before checking the dataset. Might update data_dict
+ loggers = {'wandb': None} # loggers dict
+ if rank in [-1, 0]:
+ opt.hyp = hyp # add hyperparameters
+ run_id = torch.load(weights).get('wandb_id') if weights.endswith('.pt') and os.path.isfile(weights) else None
+ wandb_logger = WandbLogger(opt, Path(opt.save_dir).stem, run_id, data_dict)
+ loggers['wandb'] = wandb_logger.wandb
+ data_dict = wandb_logger.data_dict
+ if wandb_logger.wandb:
+ weights, epochs, hyp = opt.weights, opt.epochs, opt.hyp # WandbLogger might update weights, epochs if resuming
+
+ nc = 1 if opt.single_cls else int(data_dict['nc']) # number of classes
+ names = ['item'] if opt.single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
+ assert len(names) == nc, '%g names found for nc=%g dataset in %s' % (len(names), nc, opt.data) # check
+
+ # Model
+ pretrained = weights.endswith('.pt')
+ if pretrained:
+ with torch_distributed_zero_first(rank):
+ attempt_download(weights) # download if not found locally
+ ckpt = torch.load(weights, map_location=device) # load checkpoint
+ model = Model(opt.cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ exclude = ['anchor'] if (opt.cfg or hyp.get('anchors')) and not opt.resume else [] # exclude keys
+ state_dict = ckpt['model'].float().state_dict() # to FP32
+ state_dict = intersect_dicts(state_dict, model.state_dict(), exclude=exclude) # intersect
+ model.load_state_dict(state_dict, strict=False) # load
+ logger.info('Transferred %g/%g items from %s' % (len(state_dict), len(model.state_dict()), weights)) # report
+ else:
+ model = Model(opt.cfg, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ with torch_distributed_zero_first(rank):
+ check_dataset(data_dict) # check
+ train_path = data_dict['train']
+ test_path = data_dict['val']
+
+ # Freeze
+ freeze = [] # parameter names to freeze (full or partial)
+ for k, v in model.named_parameters():
+ v.requires_grad = True # train all layers
+ if any(x in k for x in freeze):
+ print('freezing %s' % k)
+ v.requires_grad = False
+
+ # Optimizer
+ nbs = 64 # nominal batch size
+ accumulate = max(round(nbs / total_batch_size), 1) # accumulate loss before optimizing
+ hyp['weight_decay'] *= total_batch_size * accumulate / nbs # scale weight_decay
+ logger.info(f"Scaled weight_decay = {hyp['weight_decay']}")
+
+ pg0, pg1, pg2 = [], [], [] # optimizer parameter groups
+ for k, v in model.named_modules():
+ if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter):
+ pg2.append(v.bias) # biases
+ if isinstance(v, nn.BatchNorm2d):
+ pg0.append(v.weight) # no decay
+ elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter):
+ pg1.append(v.weight) # apply decay
+ if hasattr(v, 'im'):
+ if hasattr(v.im, 'implicit'):
+ pg0.append(v.im.implicit)
+ else:
+ for iv in v.im:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'imc'):
+ if hasattr(v.imc, 'implicit'):
+ pg0.append(v.imc.implicit)
+ else:
+ for iv in v.imc:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'imb'):
+ if hasattr(v.imb, 'implicit'):
+ pg0.append(v.imb.implicit)
+ else:
+ for iv in v.imb:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'imo'):
+ if hasattr(v.imo, 'implicit'):
+ pg0.append(v.imo.implicit)
+ else:
+ for iv in v.imo:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'ia'):
+ if hasattr(v.ia, 'implicit'):
+ pg0.append(v.ia.implicit)
+ else:
+ for iv in v.ia:
+ pg0.append(iv.implicit)
+ if hasattr(v, 'attn'):
+ if hasattr(v.attn, 'logit_scale'):
+ pg0.append(v.attn.logit_scale)
+ if hasattr(v.attn, 'q_bias'):
+ pg0.append(v.attn.q_bias)
+ if hasattr(v.attn, 'v_bias'):
+ pg0.append(v.attn.v_bias)
+ if hasattr(v.attn, 'relative_position_bias_table'):
+ pg0.append(v.attn.relative_position_bias_table)
+ if hasattr(v, 'rbr_dense'):
+ if hasattr(v.rbr_dense, 'weight_rbr_origin'):
+ pg0.append(v.rbr_dense.weight_rbr_origin)
+ if hasattr(v.rbr_dense, 'weight_rbr_avg_conv'):
+ pg0.append(v.rbr_dense.weight_rbr_avg_conv)
+ if hasattr(v.rbr_dense, 'weight_rbr_pfir_conv'):
+ pg0.append(v.rbr_dense.weight_rbr_pfir_conv)
+ if hasattr(v.rbr_dense, 'weight_rbr_1x1_kxk_idconv1'):
+ pg0.append(v.rbr_dense.weight_rbr_1x1_kxk_idconv1)
+ if hasattr(v.rbr_dense, 'weight_rbr_1x1_kxk_conv2'):
+ pg0.append(v.rbr_dense.weight_rbr_1x1_kxk_conv2)
+ if hasattr(v.rbr_dense, 'weight_rbr_gconv_dw'):
+ pg0.append(v.rbr_dense.weight_rbr_gconv_dw)
+ if hasattr(v.rbr_dense, 'weight_rbr_gconv_pw'):
+ pg0.append(v.rbr_dense.weight_rbr_gconv_pw)
+ if hasattr(v.rbr_dense, 'vector'):
+ pg0.append(v.rbr_dense.vector)
+
+ if opt.adam:
+ optimizer = optim.Adam(pg0, lr=hyp['lr0'], betas=(hyp['momentum'], 0.999)) # adjust beta1 to momentum
+ else:
+ optimizer = optim.SGD(pg0, lr=hyp['lr0'], momentum=hyp['momentum'], nesterov=True)
+
+ optimizer.add_param_group({'params': pg1, 'weight_decay': hyp['weight_decay']}) # add pg1 with weight_decay
+ optimizer.add_param_group({'params': pg2}) # add pg2 (biases)
+ logger.info('Optimizer groups: %g .bias, %g conv.weight, %g other' % (len(pg2), len(pg1), len(pg0)))
+ del pg0, pg1, pg2
+
+ # Scheduler https://arxiv.org/pdf/1812.01187.pdf
+ # https://pytorch.org/docs/stable/_modules/torch/optim/lr_scheduler.html#OneCycleLR
+ if opt.linear_lr:
+ lf = lambda x: (1 - x / (epochs - 1)) * (1.0 - hyp['lrf']) + hyp['lrf'] # linear
+ else:
+ lf = one_cycle(1, hyp['lrf'], epochs) # cosine 1->hyp['lrf']
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
+ # plot_lr_scheduler(optimizer, scheduler, epochs)
+
+ # EMA
+ ema = ModelEMA(model) if rank in [-1, 0] else None
+
+ # Resume
+ start_epoch, best_fitness = 0, 0.0
+ if pretrained:
+ # Optimizer
+ if ckpt['optimizer'] is not None:
+ optimizer.load_state_dict(ckpt['optimizer'])
+ best_fitness = ckpt['best_fitness']
+
+ # EMA
+ if ema and ckpt.get('ema'):
+ ema.ema.load_state_dict(ckpt['ema'].float().state_dict())
+ ema.updates = ckpt['updates']
+
+ # Results
+ if ckpt.get('training_results') is not None:
+ results_file.write_text(ckpt['training_results']) # write results.txt
+
+ # Epochs
+ start_epoch = ckpt['epoch'] + 1
+ if opt.resume:
+ assert start_epoch > 0, '%s training to %g epochs is finished, nothing to resume.' % (weights, epochs)
+ if epochs < start_epoch:
+ logger.info('%s has been trained for %g epochs. Fine-tuning for %g additional epochs.' %
+ (weights, ckpt['epoch'], epochs))
+ epochs += ckpt['epoch'] # finetune additional epochs
+
+ del ckpt, state_dict
+
+ # Image sizes
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ nl = model.model[-1].nl # number of detection layers (used for scaling hyp['obj'])
+ imgsz, imgsz_test = [check_img_size(x, gs) for x in opt.img_size] # verify imgsz are gs-multiples
+
+ # DP mode
+ if cuda and rank == -1 and torch.cuda.device_count() > 1:
+ model = torch.nn.DataParallel(model)
+
+ # SyncBatchNorm
+ if opt.sync_bn and cuda and rank != -1:
+ model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
+ logger.info('Using SyncBatchNorm()')
+
+ # Trainloader
+ dataloader, dataset = create_dataloader(train_path, imgsz, batch_size, gs, opt,
+ hyp=hyp, augment=True, cache=opt.cache_images, rect=opt.rect, rank=rank,
+ world_size=opt.world_size, workers=opt.workers,
+ image_weights=opt.image_weights, quad=opt.quad, prefix=colorstr('train: '))
+ mlc = np.concatenate(dataset.labels, 0)[:, 0].max() # max label class
+ nb = len(dataloader) # number of batches
+ assert mlc < nc, 'Label class %g exceeds nc=%g in %s. Possible class labels are 0-%g' % (mlc, nc, opt.data, nc - 1)
+
+ # Process 0
+ if rank in [-1, 0]:
+ testloader = create_dataloader(test_path, imgsz_test, batch_size * 2, gs, opt, # testloader
+ hyp=hyp, cache=opt.cache_images and not opt.notest, rect=True, rank=-1,
+ world_size=opt.world_size, workers=opt.workers,
+ pad=0.5, prefix=colorstr('val: '))[0]
+
+ if not opt.resume:
+ labels = np.concatenate(dataset.labels, 0)
+ c = torch.tensor(labels[:, 0]) # classes
+ # cf = torch.bincount(c.long(), minlength=nc) + 1. # frequency
+ # model._initialize_biases(cf.to(device))
+ if plots:
+ #plot_labels(labels, names, save_dir, loggers)
+ if tb_writer:
+ tb_writer.add_histogram('classes', c, 0)
+
+ # Anchors
+ if not opt.noautoanchor:
+ check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz)
+ model.half().float() # pre-reduce anchor precision
+
+ # DDP mode
+ if cuda and rank != -1:
+ model = DDP(model, device_ids=[opt.local_rank], output_device=opt.local_rank,
+ # nn.MultiheadAttention incompatibility with DDP https://github.com/pytorch/pytorch/issues/26698
+ find_unused_parameters=any(isinstance(layer, nn.MultiheadAttention) for layer in model.modules()))
+
+ # Model parameters
+ hyp['box'] *= 3. / nl # scale to layers
+ hyp['cls'] *= nc / 80. * 3. / nl # scale to classes and layers
+ hyp['obj'] *= (imgsz / 640) ** 2 * 3. / nl # scale to image size and layers
+ hyp['label_smoothing'] = opt.label_smoothing
+ model.nc = nc # attach number of classes to model
+ model.hyp = hyp # attach hyperparameters to model
+ model.gr = 1.0 # iou loss ratio (obj_loss = 1.0 or iou)
+ model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
+ model.names = names
+
+ # Start training
+ t0 = time.time()
+ nw = max(round(hyp['warmup_epochs'] * nb), 1000) # number of warmup iterations, max(3 epochs, 1k iterations)
+ # nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
+ maps = np.zeros(nc) # mAP per class
+ results = (0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
+ scheduler.last_epoch = start_epoch - 1 # do not move
+ scaler = amp.GradScaler(enabled=cuda)
+ compute_loss_ota = ComputeLossAuxOTA(model) # init loss class
+ compute_loss = ComputeLoss(model) # init loss class
+ logger.info(f'Image sizes {imgsz} train, {imgsz_test} test\n'
+ f'Using {dataloader.num_workers} dataloader workers\n'
+ f'Logging results to {save_dir}\n'
+ f'Starting training for {epochs} epochs...')
+ torch.save(model, wdir / 'init.pt')
+ for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
+ model.train()
+
+ # Update image weights (optional)
+ if opt.image_weights:
+ # Generate indices
+ if rank in [-1, 0]:
+ cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
+ iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
+ dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
+ # Broadcast if DDP
+ if rank != -1:
+ indices = (torch.tensor(dataset.indices) if rank == 0 else torch.zeros(dataset.n)).int()
+ dist.broadcast(indices, 0)
+ if rank != 0:
+ dataset.indices = indices.cpu().numpy()
+
+ # Update mosaic border
+ # b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
+ # dataset.mosaic_border = [b - imgsz, -b] # height, width borders
+
+ mloss = torch.zeros(4, device=device) # mean losses
+ if rank != -1:
+ dataloader.sampler.set_epoch(epoch)
+ pbar = enumerate(dataloader)
+ logger.info(('\n' + '%10s' * 8) % ('Epoch', 'gpu_mem', 'box', 'obj', 'cls', 'total', 'labels', 'img_size'))
+ if rank in [-1, 0]:
+ pbar = tqdm(pbar, total=nb) # progress bar
+ optimizer.zero_grad()
+ for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
+ ni = i + nb * epoch # number integrated batches (since train start)
+ imgs = imgs.to(device, non_blocking=True).float() / 255.0 # uint8 to float32, 0-255 to 0.0-1.0
+
+ # Warmup
+ if ni <= nw:
+ xi = [0, nw] # x interp
+ # model.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
+ accumulate = max(1, np.interp(ni, xi, [1, nbs / total_batch_size]).round())
+ for j, x in enumerate(optimizer.param_groups):
+ # bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
+ x['lr'] = np.interp(ni, xi, [hyp['warmup_bias_lr'] if j == 2 else 0.0, x['initial_lr'] * lf(epoch)])
+ if 'momentum' in x:
+ x['momentum'] = np.interp(ni, xi, [hyp['warmup_momentum'], hyp['momentum']])
+
+ # Multi-scale
+ if opt.multi_scale:
+ sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
+ sf = sz / max(imgs.shape[2:]) # scale factor
+ if sf != 1:
+ ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
+ imgs = F.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)
+
+ # Forward
+ with amp.autocast(enabled=cuda):
+ pred = model(imgs) # forward
+ loss, loss_items = compute_loss_ota(pred, targets.to(device), imgs) # loss scaled by batch_size
+ if rank != -1:
+ loss *= opt.world_size # gradient averaged between devices in DDP mode
+ if opt.quad:
+ loss *= 4.
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize
+ if ni % accumulate == 0:
+ scaler.step(optimizer) # optimizer.step
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+
+ # Print
+ if rank in [-1, 0]:
+ mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
+ mem = '%.3gG' % (torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0) # (GB)
+ s = ('%10s' * 2 + '%10.4g' * 6) % (
+ '%g/%g' % (epoch, epochs - 1), mem, *mloss, targets.shape[0], imgs.shape[-1])
+ pbar.set_description(s)
+
+ # Plot
+ if plots and ni < 10:
+ f = save_dir / f'train_batch{ni}.jpg' # filename
+ Thread(target=plot_images, args=(imgs, targets, paths, f), daemon=True).start()
+ # if tb_writer:
+ # tb_writer.add_image(f, result, dataformats='HWC', global_step=epoch)
+ # tb_writer.add_graph(torch.jit.trace(model, imgs, strict=False), []) # add model graph
+ elif plots and ni == 10 and wandb_logger.wandb:
+ wandb_logger.log({"Mosaics": [wandb_logger.wandb.Image(str(x), caption=x.name) for x in
+ save_dir.glob('train*.jpg') if x.exists()]})
+
+ # end batch ------------------------------------------------------------------------------------------------
+ # end epoch ----------------------------------------------------------------------------------------------------
+
+ # Scheduler
+ lr = [x['lr'] for x in optimizer.param_groups] # for tensorboard
+ scheduler.step()
+
+ # DDP process 0 or single-GPU
+ if rank in [-1, 0]:
+ # mAP
+ ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'gr', 'names', 'stride', 'class_weights'])
+ final_epoch = epoch + 1 == epochs
+ if not opt.notest or final_epoch: # Calculate mAP
+ wandb_logger.current_epoch = epoch + 1
+ results, maps, times = test.test(data_dict,
+ batch_size=batch_size * 2,
+ imgsz=imgsz_test,
+ model=ema.ema,
+ single_cls=opt.single_cls,
+ dataloader=testloader,
+ save_dir=save_dir,
+ verbose=nc < 50 and final_epoch,
+ plots=plots and final_epoch,
+ wandb_logger=wandb_logger,
+ compute_loss=compute_loss,
+ is_coco=is_coco,
+ v5_metric=opt.v5_metric)
+
+ # Write
+ with open(results_file, 'a') as f:
+ f.write(s + '%10.4g' * 7 % results + '\n') # append metrics, val_loss
+ if len(opt.name) and opt.bucket:
+ os.system('gsutil cp %s gs://%s/results/results%s.txt' % (results_file, opt.bucket, opt.name))
+
+ # Log
+ tags = ['train/box_loss', 'train/obj_loss', 'train/cls_loss', # train loss
+ 'metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/mAP_0.5:0.95',
+ 'val/box_loss', 'val/obj_loss', 'val/cls_loss', # val loss
+ 'x/lr0', 'x/lr1', 'x/lr2'] # params
+ for x, tag in zip(list(mloss[:-1]) + list(results) + lr, tags):
+ if tb_writer:
+ tb_writer.add_scalar(tag, x, epoch) # tensorboard
+ if wandb_logger.wandb:
+ wandb_logger.log({tag: x}) # W&B
+
+ # Update best mAP
+ fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
+ if fi > best_fitness:
+ best_fitness = fi
+ wandb_logger.end_epoch(best_result=best_fitness == fi)
+
+ # Save model
+ if (not opt.nosave) or (final_epoch and not opt.evolve): # if save
+ ckpt = {'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'training_results': results_file.read_text(),
+ 'model': deepcopy(model.module if is_parallel(model) else model).half(),
+ 'ema': deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': optimizer.state_dict(),
+ 'wandb_id': wandb_logger.wandb_run.id if wandb_logger.wandb else None}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fi:
+ torch.save(ckpt, best)
+ if (best_fitness == fi) and (epoch >= 200):
+ torch.save(ckpt, wdir / 'best_{:03d}.pt'.format(epoch))
+ if epoch == 0:
+ torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
+ elif ((epoch+1) % 25) == 0:
+ torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
+ elif epoch >= (epochs-5):
+ torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
+ if wandb_logger.wandb:
+ if ((epoch + 1) % opt.save_period == 0 and not final_epoch) and opt.save_period != -1:
+ wandb_logger.log_model(
+ last.parent, opt, epoch, fi, best_model=best_fitness == fi)
+ del ckpt
+
+ # end epoch ----------------------------------------------------------------------------------------------------
+ # end training
+ if rank in [-1, 0]:
+ # Plots
+ if plots:
+ plot_results(save_dir=save_dir) # save as results.png
+ if wandb_logger.wandb:
+ files = ['results.png', 'confusion_matrix.png', *[f'{x}_curve.png' for x in ('F1', 'PR', 'P', 'R')]]
+ wandb_logger.log({"Results": [wandb_logger.wandb.Image(str(save_dir / f), caption=f) for f in files
+ if (save_dir / f).exists()]})
+ # Test best.pt
+ logger.info('%g epochs completed in %.3f hours.\n' % (epoch - start_epoch + 1, (time.time() - t0) / 3600))
+ if opt.data.endswith('coco.yaml') and nc == 80: # if COCO
+ for m in (last, best) if best.exists() else (last): # speed, mAP tests
+ results, _, _ = test.test(opt.data,
+ batch_size=batch_size * 2,
+ imgsz=imgsz_test,
+ conf_thres=0.001,
+ iou_thres=0.7,
+ model=attempt_load(m, device).half(),
+ single_cls=opt.single_cls,
+ dataloader=testloader,
+ save_dir=save_dir,
+ save_json=True,
+ plots=False,
+ is_coco=is_coco,
+ v5_metric=opt.v5_metric)
+
+ # Strip optimizers
+ final = best if best.exists() else last # final model
+ for f in last, best:
+ if f.exists():
+ strip_optimizer(f) # strip optimizers
+ if opt.bucket:
+ os.system(f'gsutil cp {final} gs://{opt.bucket}/weights') # upload
+ if wandb_logger.wandb and not opt.evolve: # Log the stripped model
+ wandb_logger.wandb.log_artifact(str(final), type='model',
+ name='run_' + wandb_logger.wandb_run.id + '_model',
+ aliases=['last', 'best', 'stripped'])
+ wandb_logger.finish_run()
+ else:
+ dist.destroy_process_group()
+ torch.cuda.empty_cache()
+ return results
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default='yolo7.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default='data/coco.yaml', help='data.yaml path')
+ parser.add_argument('--hyp', type=str, default='data/hyp.scratch.p5.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300)
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs')
+ parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='[train, test] image sizes')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--notest', action='store_true', help='only test final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
+ parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--adam', action='store_true', help='use torch.optim.Adam() optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')
+ parser.add_argument('--workers', type=int, default=8, help='maximum number of dataloader workers')
+ parser.add_argument('--project', default='runs/train', help='save to project/name')
+ parser.add_argument('--entity', default=None, help='W&B entity')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--linear-lr', action='store_true', help='linear LR')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--upload_dataset', action='store_true', help='Upload dataset as W&B artifact table')
+ parser.add_argument('--bbox_interval', type=int, default=-1, help='Set bounding-box image logging interval for W&B')
+ parser.add_argument('--save_period', type=int, default=-1, help='Log model after every "save_period" epoch')
+ parser.add_argument('--artifact_alias', type=str, default="latest", help='version of dataset artifact to be used')
+ parser.add_argument('--v5-metric', action='store_true', help='assume maximum recall as 1.0 in AP calculation')
+ opt = parser.parse_args()
+
+ # Set DDP variables
+ opt.world_size = int(os.environ['WORLD_SIZE']) if 'WORLD_SIZE' in os.environ else 1
+ opt.global_rank = int(os.environ['RANK']) if 'RANK' in os.environ else -1
+ set_logging(opt.global_rank)
+ #if opt.global_rank in [-1, 0]:
+ # check_git_status()
+ # check_requirements()
+
+ # Resume
+ wandb_run = check_wandb_resume(opt)
+ if opt.resume and not wandb_run: # resume an interrupted run
+ ckpt = opt.resume if isinstance(opt.resume, str) else get_latest_run() # specified or most recent path
+ assert os.path.isfile(ckpt), 'ERROR: --resume checkpoint does not exist'
+ apriori = opt.global_rank, opt.local_rank
+ with open(Path(ckpt).parent.parent / 'opt.yaml') as f:
+ opt = argparse.Namespace(**yaml.load(f, Loader=yaml.SafeLoader)) # replace
+ opt.cfg, opt.weights, opt.resume, opt.batch_size, opt.global_rank, opt.local_rank = '', ckpt, True, opt.total_batch_size, *apriori # reinstate
+ logger.info('Resuming training from %s' % ckpt)
+ else:
+ # opt.hyp = opt.hyp or ('hyp.finetune.yaml' if opt.weights else 'hyp.scratch.yaml')
+ opt.data, opt.cfg, opt.hyp = check_file(opt.data), check_file(opt.cfg), check_file(opt.hyp) # check files
+ assert len(opt.cfg) or len(opt.weights), 'either --cfg or --weights must be specified'
+ opt.img_size.extend([opt.img_size[-1]] * (2 - len(opt.img_size))) # extend to 2 sizes (train, test)
+ opt.name = 'evolve' if opt.evolve else opt.name
+ opt.save_dir = increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok | opt.evolve) # increment run
+
+ # DDP mode
+ opt.total_batch_size = opt.batch_size
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if opt.local_rank != -1:
+ assert torch.cuda.device_count() > opt.local_rank
+ torch.cuda.set_device(opt.local_rank)
+ device = torch.device('cuda', opt.local_rank)
+ dist.init_process_group(backend='nccl', init_method='env://') # distributed backend
+ assert opt.batch_size % opt.world_size == 0, '--batch-size must be multiple of CUDA device count'
+ opt.batch_size = opt.total_batch_size // opt.world_size
+
+ # Hyperparameters
+ with open(opt.hyp) as f:
+ hyp = yaml.load(f, Loader=yaml.SafeLoader) # load hyps
+
+ # Train
+ logger.info(opt)
+ if not opt.evolve:
+ tb_writer = None # init loggers
+ if opt.global_rank in [-1, 0]:
+ prefix = colorstr('tensorboard: ')
+ logger.info(f"{prefix}Start with 'tensorboard --logdir {opt.project}', view at http://localhost:6006/")
+ tb_writer = SummaryWriter(opt.save_dir) # Tensorboard
+ train(hyp, opt, device, tb_writer)
+
+ # Evolve hyperparameters (optional)
+ else:
+ # Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)
+ meta = {'lr0': (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
+ 'lrf': (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
+ 'momentum': (0.3, 0.6, 0.98), # SGD momentum/Adam beta1
+ 'weight_decay': (1, 0.0, 0.001), # optimizer weight decay
+ 'warmup_epochs': (1, 0.0, 5.0), # warmup epochs (fractions ok)
+ 'warmup_momentum': (1, 0.0, 0.95), # warmup initial momentum
+ 'warmup_bias_lr': (1, 0.0, 0.2), # warmup initial bias lr
+ 'box': (1, 0.02, 0.2), # box loss gain
+ 'cls': (1, 0.2, 4.0), # cls loss gain
+ 'cls_pw': (1, 0.5, 2.0), # cls BCELoss positive_weight
+ 'obj': (1, 0.2, 4.0), # obj loss gain (scale with pixels)
+ 'obj_pw': (1, 0.5, 2.0), # obj BCELoss positive_weight
+ 'iou_t': (0, 0.1, 0.7), # IoU training threshold
+ 'anchor_t': (1, 2.0, 8.0), # anchor-multiple threshold
+ 'anchors': (2, 2.0, 10.0), # anchors per output grid (0 to ignore)
+ 'fl_gamma': (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
+ 'hsv_h': (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
+ 'hsv_s': (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
+ 'hsv_v': (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)
+ 'degrees': (1, 0.0, 45.0), # image rotation (+/- deg)
+ 'translate': (1, 0.0, 0.9), # image translation (+/- fraction)
+ 'scale': (1, 0.0, 0.9), # image scale (+/- gain)
+ 'shear': (1, 0.0, 10.0), # image shear (+/- deg)
+ 'perspective': (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
+ 'flipud': (1, 0.0, 1.0), # image flip up-down (probability)
+ 'fliplr': (0, 0.0, 1.0), # image flip left-right (probability)
+ 'mosaic': (1, 0.0, 1.0), # image mixup (probability)
+ 'mixup': (1, 0.0, 1.0)} # image mixup (probability)
+
+ with open(opt.hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ if 'anchors' not in hyp: # anchors commented in hyp.yaml
+ hyp['anchors'] = 3
+
+ assert opt.local_rank == -1, 'DDP mode not implemented for --evolve'
+ opt.notest, opt.nosave = True, True # only test/save final epoch
+ # ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
+ yaml_file = Path(opt.save_dir) / 'hyp_evolved.yaml' # save best result here
+ if opt.bucket:
+ os.system('gsutil cp gs://%s/evolve.txt .' % opt.bucket) # download evolve.txt if exists
+
+ for _ in range(300): # generations to evolve
+ if Path('evolve.txt').exists(): # if evolve.txt exists: select best hyps and mutate
+ # Select parent(s)
+ parent = 'single' # parent selection method: 'single' or 'weighted'
+ x = np.loadtxt('evolve.txt', ndmin=2)
+ n = min(5, len(x)) # number of previous results to consider
+ x = x[np.argsort(-fitness(x))][:n] # top n mutations
+ w = fitness(x) - fitness(x).min() # weights
+ if parent == 'single' or len(x) == 1:
+ # x = x[random.randint(0, n - 1)] # random selection
+ x = x[random.choices(range(n), weights=w)[0]] # weighted selection
+ elif parent == 'weighted':
+ x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
+
+ # Mutate
+ mp, s = 0.8, 0.2 # mutation probability, sigma
+ npr = np.random
+ npr.seed(int(time.time()))
+ g = np.array([x[0] for x in meta.values()]) # gains 0-1
+ ng = len(meta)
+ v = np.ones(ng)
+ while all(v == 1): # mutate until a change occurs (prevent duplicates)
+ v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
+ for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
+ hyp[k] = float(x[i + 7] * v[i]) # mutate
+
+ # Constrain to limits
+ for k, v in meta.items():
+ hyp[k] = max(hyp[k], v[1]) # lower limit
+ hyp[k] = min(hyp[k], v[2]) # upper limit
+ hyp[k] = round(hyp[k], 5) # significant digits
+
+ # Train mutation
+ results = train(hyp.copy(), opt, device)
+
+ # Write mutation results
+ print_mutation(hyp.copy(), results, yaml_file, opt.bucket)
+
+ # Plot results
+ plot_evolution(yaml_file)
+ print(f'Hyperparameter evolution complete. Best results saved as: {yaml_file}\n'
+ f'Command to train a new model with these hyperparameters: $ python train.py --hyp {yaml_file}')
diff --git a/ipex/utils/__init__.py b/ipex/utils/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/ipex/utils/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/ipex/utils/activations.py b/ipex/utils/activations.py
new file mode 100644
index 000000000..aa3ddf071
--- /dev/null
+++ b/ipex/utils/activations.py
@@ -0,0 +1,72 @@
+# Activation functions
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+
+# SiLU https://arxiv.org/pdf/1606.08415.pdf ----------------------------------------------------------------------------
+class SiLU(nn.Module): # export-friendly version of nn.SiLU()
+ @staticmethod
+ def forward(x):
+ return x * torch.sigmoid(x)
+
+
+class Hardswish(nn.Module): # export-friendly version of nn.Hardswish()
+ @staticmethod
+ def forward(x):
+ # return x * F.hardsigmoid(x) # for torchscript and CoreML
+ return x * F.hardtanh(x + 3, 0., 6.) / 6. # for torchscript, CoreML and ONNX
+
+
+class MemoryEfficientSwish(nn.Module):
+ class F(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x * torch.sigmoid(x)
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ return grad_output * (sx * (1 + x * (1 - sx)))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+# Mish https://github.com/digantamisra98/Mish --------------------------------------------------------------------------
+class Mish(nn.Module):
+ @staticmethod
+ def forward(x):
+ return x * F.softplus(x).tanh()
+
+
+class MemoryEfficientMish(nn.Module):
+ class F(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ fx = F.softplus(x).tanh()
+ return grad_output * (fx + x * sx * (1 - fx * fx))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+# FReLU https://arxiv.org/abs/2007.11824 -------------------------------------------------------------------------------
+class FReLU(nn.Module):
+ def __init__(self, c1, k=3): # ch_in, kernel
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
+ self.bn = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ return torch.max(x, self.bn(self.conv(x)))
diff --git a/ipex/utils/add_nms.py b/ipex/utils/add_nms.py
new file mode 100644
index 000000000..0a1f7976a
--- /dev/null
+++ b/ipex/utils/add_nms.py
@@ -0,0 +1,155 @@
+import numpy as np
+import onnx
+from onnx import shape_inference
+try:
+ import onnx_graphsurgeon as gs
+except Exception as e:
+ print('Import onnx_graphsurgeon failure: %s' % e)
+
+import logging
+
+LOGGER = logging.getLogger(__name__)
+
+class RegisterNMS(object):
+ def __init__(
+ self,
+ onnx_model_path: str,
+ precision: str = "fp32",
+ ):
+
+ self.graph = gs.import_onnx(onnx.load(onnx_model_path))
+ assert self.graph
+ LOGGER.info("ONNX graph created successfully")
+ # Fold constants via ONNX-GS that PyTorch2ONNX may have missed
+ self.graph.fold_constants()
+ self.precision = precision
+ self.batch_size = 1
+ def infer(self):
+ """
+ Sanitize the graph by cleaning any unconnected nodes, do a topological resort,
+ and fold constant inputs values. When possible, run shape inference on the
+ ONNX graph to determine tensor shapes.
+ """
+ for _ in range(3):
+ count_before = len(self.graph.nodes)
+
+ self.graph.cleanup().toposort()
+ try:
+ for node in self.graph.nodes:
+ for o in node.outputs:
+ o.shape = None
+ model = gs.export_onnx(self.graph)
+ model = shape_inference.infer_shapes(model)
+ self.graph = gs.import_onnx(model)
+ except Exception as e:
+ LOGGER.info(f"Shape inference could not be performed at this time:\n{e}")
+ try:
+ self.graph.fold_constants(fold_shapes=True)
+ except TypeError as e:
+ LOGGER.error(
+ "This version of ONNX GraphSurgeon does not support folding shapes, "
+ f"please upgrade your onnx_graphsurgeon module. Error:\n{e}"
+ )
+ raise
+
+ count_after = len(self.graph.nodes)
+ if count_before == count_after:
+ # No new folding occurred in this iteration, so we can stop for now.
+ break
+
+ def save(self, output_path):
+ """
+ Save the ONNX model to the given location.
+ Args:
+ output_path: Path pointing to the location where to write
+ out the updated ONNX model.
+ """
+ self.graph.cleanup().toposort()
+ model = gs.export_onnx(self.graph)
+ onnx.save(model, output_path)
+ LOGGER.info(f"Saved ONNX model to {output_path}")
+
+ def register_nms(
+ self,
+ *,
+ score_thresh: float = 0.25,
+ nms_thresh: float = 0.45,
+ detections_per_img: int = 100,
+ ):
+ """
+ Register the ``EfficientNMS_TRT`` plugin node.
+ NMS expects these shapes for its input tensors:
+ - box_net: [batch_size, number_boxes, 4]
+ - class_net: [batch_size, number_boxes, number_labels]
+ Args:
+ score_thresh (float): The scalar threshold for score (low scoring boxes are removed).
+ nms_thresh (float): The scalar threshold for IOU (new boxes that have high IOU
+ overlap with previously selected boxes are removed).
+ detections_per_img (int): Number of best detections to keep after NMS.
+ """
+
+ self.infer()
+ # Find the concat node at the end of the network
+ op_inputs = self.graph.outputs
+ op = "EfficientNMS_TRT"
+ attrs = {
+ "plugin_version": "1",
+ "background_class": -1, # no background class
+ "max_output_boxes": detections_per_img,
+ "score_threshold": score_thresh,
+ "iou_threshold": nms_thresh,
+ "score_activation": False,
+ "box_coding": 0,
+ }
+
+ if self.precision == "fp32":
+ dtype_output = np.float32
+ elif self.precision == "fp16":
+ dtype_output = np.float16
+ else:
+ raise NotImplementedError(f"Currently not supports precision: {self.precision}")
+
+ # NMS Outputs
+ output_num_detections = gs.Variable(
+ name="num_dets",
+ dtype=np.int32,
+ shape=[self.batch_size, 1],
+ ) # A scalar indicating the number of valid detections per batch image.
+ output_boxes = gs.Variable(
+ name="det_boxes",
+ dtype=dtype_output,
+ shape=[self.batch_size, detections_per_img, 4],
+ )
+ output_scores = gs.Variable(
+ name="det_scores",
+ dtype=dtype_output,
+ shape=[self.batch_size, detections_per_img],
+ )
+ output_labels = gs.Variable(
+ name="det_classes",
+ dtype=np.int32,
+ shape=[self.batch_size, detections_per_img],
+ )
+
+ op_outputs = [output_num_detections, output_boxes, output_scores, output_labels]
+
+ # Create the NMS Plugin node with the selected inputs. The outputs of the node will also
+ # become the final outputs of the graph.
+ self.graph.layer(op=op, name="batched_nms", inputs=op_inputs, outputs=op_outputs, attrs=attrs)
+ LOGGER.info(f"Created NMS plugin '{op}' with attributes: {attrs}")
+
+ self.graph.outputs = op_outputs
+
+ self.infer()
+
+ def save(self, output_path):
+ """
+ Save the ONNX model to the given location.
+ Args:
+ output_path: Path pointing to the location where to write
+ out the updated ONNX model.
+ """
+ self.graph.cleanup().toposort()
+ model = gs.export_onnx(self.graph)
+ onnx.save(model, output_path)
+ LOGGER.info(f"Saved ONNX model to {output_path}")
diff --git a/ipex/utils/autoanchor.py b/ipex/utils/autoanchor.py
new file mode 100644
index 000000000..f491032e5
--- /dev/null
+++ b/ipex/utils/autoanchor.py
@@ -0,0 +1,160 @@
+# Auto-anchor utils
+
+import numpy as np
+import torch
+import yaml
+from scipy.cluster.vq import kmeans
+from tqdm import tqdm
+
+from utils.general import colorstr
+
+
+def check_anchor_order(m):
+ # Check anchor order against stride order for YOLO Detect() module m, and correct if necessary
+ a = m.anchor_grid.prod(-1).view(-1) # anchor area
+ da = a[-1] - a[0] # delta a
+ ds = m.stride[-1] - m.stride[0] # delta s
+ if da.sign() != ds.sign(): # same order
+ print('Reversing anchor order')
+ m.anchors[:] = m.anchors.flip(0)
+ m.anchor_grid[:] = m.anchor_grid.flip(0)
+
+
+def check_anchors(dataset, model, thr=4.0, imgsz=640):
+ # Check anchor fit to data, recompute if necessary
+ prefix = colorstr('autoanchor: ')
+ print(f'\n{prefix}Analyzing anchors... ', end='')
+ m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
+ shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
+ wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
+
+ def metric(k): # compute metric
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1. / r).min(2)[0] # ratio metric
+ best = x.max(1)[0] # best_x
+ aat = (x > 1. / thr).float().sum(1).mean() # anchors above threshold
+ bpr = (best > 1. / thr).float().mean() # best possible recall
+ return bpr, aat
+
+ anchors = m.anchor_grid.clone().cpu().view(-1, 2) # current anchors
+ bpr, aat = metric(anchors)
+ print(f'anchors/target = {aat:.2f}, Best Possible Recall (BPR) = {bpr:.4f}', end='')
+ if bpr < 0.98: # threshold to recompute
+ print('. Attempting to improve anchors, please wait...')
+ na = m.anchor_grid.numel() // 2 # number of anchors
+ try:
+ anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
+ except Exception as e:
+ print(f'{prefix}ERROR: {e}')
+ new_bpr = metric(anchors)[0]
+ if new_bpr > bpr: # replace anchors
+ anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
+ m.anchor_grid[:] = anchors.clone().view_as(m.anchor_grid) # for inference
+ check_anchor_order(m)
+ m.anchors[:] = anchors.clone().view_as(m.anchors) / m.stride.to(m.anchors.device).view(-1, 1, 1) # loss
+ print(f'{prefix}New anchors saved to model. Update model *.yaml to use these anchors in the future.')
+ else:
+ print(f'{prefix}Original anchors better than new anchors. Proceeding with original anchors.')
+ print('') # newline
+
+
+def kmean_anchors(path='./data/coco.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
+ """ Creates kmeans-evolved anchors from training dataset
+
+ Arguments:
+ path: path to dataset *.yaml, or a loaded dataset
+ n: number of anchors
+ img_size: image size used for training
+ thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
+ gen: generations to evolve anchors using genetic algorithm
+ verbose: print all results
+
+ Return:
+ k: kmeans evolved anchors
+
+ Usage:
+ from utils.autoanchor import *; _ = kmean_anchors()
+ """
+ thr = 1. / thr
+ prefix = colorstr('autoanchor: ')
+
+ def metric(k, wh): # compute metrics
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1. / r).min(2)[0] # ratio metric
+ # x = wh_iou(wh, torch.tensor(k)) # iou metric
+ return x, x.max(1)[0] # x, best_x
+
+ def anchor_fitness(k): # mutation fitness
+ _, best = metric(torch.tensor(k, dtype=torch.float32), wh)
+ return (best * (best > thr).float()).mean() # fitness
+
+ def print_results(k):
+ k = k[np.argsort(k.prod(1))] # sort small to large
+ x, best = metric(k, wh0)
+ bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
+ print(f'{prefix}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr')
+ print(f'{prefix}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, '
+ f'past_thr={x[x > thr].mean():.3f}-mean: ', end='')
+ for i, x in enumerate(k):
+ print('%i,%i' % (round(x[0]), round(x[1])), end=', ' if i < len(k) - 1 else '\n') # use in *.cfg
+ return k
+
+ if isinstance(path, str): # *.yaml file
+ with open(path) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # model dict
+ from utils.datasets import LoadImagesAndLabels
+ dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
+ else:
+ dataset = path # dataset
+
+ # Get label wh
+ shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
+
+ # Filter
+ i = (wh0 < 3.0).any(1).sum()
+ if i:
+ print(f'{prefix}WARNING: Extremely small objects found. {i} of {len(wh0)} labels are < 3 pixels in size.')
+ wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ # wh = wh * (np.random.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
+
+ # Kmeans calculation
+ print(f'{prefix}Running kmeans for {n} anchors on {len(wh)} points...')
+ s = wh.std(0) # sigmas for whitening
+ k, dist = kmeans(wh / s, n, iter=30) # points, mean distance
+ assert len(k) == n, print(f'{prefix}ERROR: scipy.cluster.vq.kmeans requested {n} points but returned only {len(k)}')
+ k *= s
+ wh = torch.tensor(wh, dtype=torch.float32) # filtered
+ wh0 = torch.tensor(wh0, dtype=torch.float32) # unfiltered
+ k = print_results(k)
+
+ # Plot
+ # k, d = [None] * 20, [None] * 20
+ # for i in tqdm(range(1, 21)):
+ # k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
+ # ax = ax.ravel()
+ # ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
+ # ax[0].hist(wh[wh[:, 0]<100, 0],400)
+ # ax[1].hist(wh[wh[:, 1]<100, 1],400)
+ # fig.savefig('wh.png', dpi=200)
+
+ # Evolve
+ npr = np.random
+ f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
+ pbar = tqdm(range(gen), desc=f'{prefix}Evolving anchors with Genetic Algorithm:') # progress bar
+ for _ in pbar:
+ v = np.ones(sh)
+ while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
+ v = ((npr.random(sh) < mp) * npr.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
+ kg = (k.copy() * v).clip(min=2.0)
+ fg = anchor_fitness(kg)
+ if fg > f:
+ f, k = fg, kg.copy()
+ pbar.desc = f'{prefix}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
+ if verbose:
+ print_results(k)
+
+ return print_results(k)
diff --git a/ipex/utils/aws/__init__.py b/ipex/utils/aws/__init__.py
new file mode 100644
index 000000000..e9691f241
--- /dev/null
+++ b/ipex/utils/aws/__init__.py
@@ -0,0 +1 @@
+#init
\ No newline at end of file
diff --git a/ipex/utils/aws/mime.sh b/ipex/utils/aws/mime.sh
new file mode 100644
index 000000000..c319a83cf
--- /dev/null
+++ b/ipex/utils/aws/mime.sh
@@ -0,0 +1,26 @@
+# AWS EC2 instance startup 'MIME' script https://aws.amazon.com/premiumsupport/knowledge-center/execute-user-data-ec2/
+# This script will run on every instance restart, not only on first start
+# --- DO NOT COPY ABOVE COMMENTS WHEN PASTING INTO USERDATA ---
+
+Content-Type: multipart/mixed; boundary="//"
+MIME-Version: 1.0
+
+--//
+Content-Type: text/cloud-config; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="cloud-config.txt"
+
+#cloud-config
+cloud_final_modules:
+- [scripts-user, always]
+
+--//
+Content-Type: text/x-shellscript; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="userdata.txt"
+
+#!/bin/bash
+# --- paste contents of userdata.sh here ---
+--//
diff --git a/ipex/utils/aws/resume.py b/ipex/utils/aws/resume.py
new file mode 100644
index 000000000..338685b19
--- /dev/null
+++ b/ipex/utils/aws/resume.py
@@ -0,0 +1,37 @@
+# Resume all interrupted trainings in yolor/ dir including DDP trainings
+# Usage: $ python utils/aws/resume.py
+
+import os
+import sys
+from pathlib import Path
+
+import torch
+import yaml
+
+sys.path.append('./') # to run '$ python *.py' files in subdirectories
+
+port = 0 # --master_port
+path = Path('').resolve()
+for last in path.rglob('*/**/last.pt'):
+ ckpt = torch.load(last)
+ if ckpt['optimizer'] is None:
+ continue
+
+ # Load opt.yaml
+ with open(last.parent.parent / 'opt.yaml') as f:
+ opt = yaml.load(f, Loader=yaml.SafeLoader)
+
+ # Get device count
+ d = opt['device'].split(',') # devices
+ nd = len(d) # number of devices
+ ddp = nd > 1 or (nd == 0 and torch.cuda.device_count() > 1) # distributed data parallel
+
+ if ddp: # multi-GPU
+ port += 1
+ cmd = f'python -m torch.distributed.launch --nproc_per_node {nd} --master_port {port} train.py --resume {last}'
+ else: # single-GPU
+ cmd = f'python train.py --resume {last}'
+
+ cmd += ' > /dev/null 2>&1 &' # redirect output to dev/null and run in daemon thread
+ print(cmd)
+ os.system(cmd)
diff --git a/ipex/utils/aws/userdata.sh b/ipex/utils/aws/userdata.sh
new file mode 100644
index 000000000..5a99d4bec
--- /dev/null
+++ b/ipex/utils/aws/userdata.sh
@@ -0,0 +1,27 @@
+#!/bin/bash
+# AWS EC2 instance startup script https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/user-data.html
+# This script will run only once on first instance start (for a re-start script see mime.sh)
+# /home/ubuntu (ubuntu) or /home/ec2-user (amazon-linux) is working dir
+# Use >300 GB SSD
+
+cd home/ubuntu
+if [ ! -d yolor ]; then
+ echo "Running first-time script." # install dependencies, download COCO, pull Docker
+ git clone -b main https://github.com/WongKinYiu/yolov7 && sudo chmod -R 777 yolov7
+ cd yolov7
+ bash data/scripts/get_coco.sh && echo "Data done." &
+ sudo docker pull nvcr.io/nvidia/pytorch:21.08-py3 && echo "Docker done." &
+ python -m pip install --upgrade pip && pip install -r requirements.txt && python detect.py && echo "Requirements done." &
+ wait && echo "All tasks done." # finish background tasks
+else
+ echo "Running re-start script." # resume interrupted runs
+ i=0
+ list=$(sudo docker ps -qa) # container list i.e. $'one\ntwo\nthree\nfour'
+ while IFS= read -r id; do
+ ((i++))
+ echo "restarting container $i: $id"
+ sudo docker start $id
+ # sudo docker exec -it $id python train.py --resume # single-GPU
+ sudo docker exec -d $id python utils/aws/resume.py # multi-scenario
+ done <<<"$list"
+fi
diff --git a/ipex/utils/datasets.py b/ipex/utils/datasets.py
new file mode 100644
index 000000000..026ef68fe
--- /dev/null
+++ b/ipex/utils/datasets.py
@@ -0,0 +1,1329 @@
+# Dataset utils and dataloaders
+
+import glob
+import logging
+import math
+import os
+import random
+import shutil
+import time
+from itertools import repeat
+from multiprocessing.pool import ThreadPool
+from pathlib import Path
+from threading import Thread
+
+import cv2
+import numpy as np
+import torch
+import torch.nn.functional as F
+from PIL import Image, ExifTags
+from torch.utils.data import Dataset
+from tqdm import tqdm
+
+import pickle
+from copy import deepcopy
+#from pycocotools import mask as maskUtils
+from torchvision.utils import save_image
+from torchvision.ops import roi_pool, roi_align, ps_roi_pool, ps_roi_align
+
+from utils.general import check_requirements, xyxy2xywh, xywh2xyxy, xywhn2xyxy, xyn2xy, segment2box, segments2boxes, \
+ resample_segments, clean_str
+from utils.torch_utils import torch_distributed_zero_first
+
+# Parameters
+help_url = 'https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
+img_formats = ['bmp', 'jpg', 'jpeg', 'png', 'tif', 'tiff', 'dng', 'webp', 'mpo'] # acceptable image suffixes
+vid_formats = ['mov', 'avi', 'mp4', 'mpg', 'mpeg', 'm4v', 'wmv', 'mkv'] # acceptable video suffixes
+logger = logging.getLogger(__name__)
+
+# Get orientation exif tag
+for orientation in ExifTags.TAGS.keys():
+ if ExifTags.TAGS[orientation] == 'Orientation':
+ break
+
+
+def get_hash(files):
+ # Returns a single hash value of a list of files
+ return sum(os.path.getsize(f) for f in files if os.path.isfile(f))
+
+
+def exif_size(img):
+ # Returns exif-corrected PIL size
+ s = img.size # (width, height)
+ try:
+ rotation = dict(img._getexif().items())[orientation]
+ if rotation == 6: # rotation 270
+ s = (s[1], s[0])
+ elif rotation == 8: # rotation 90
+ s = (s[1], s[0])
+ except:
+ pass
+
+ return s
+
+
+def create_dataloader(path, imgsz, batch_size, stride, opt, hyp=None, augment=False, cache=False, pad=0.0, rect=False,
+ rank=-1, world_size=1, workers=8, image_weights=False, quad=False, prefix=''):
+ # Make sure only the first process in DDP process the dataset first, and the following others can use the cache
+ with torch_distributed_zero_first(rank):
+ dataset = LoadImagesAndLabels(path, imgsz, batch_size,
+ augment=augment, # augment images
+ hyp=hyp, # augmentation hyperparameters
+ rect=rect, # rectangular training
+ cache_images=cache,
+ single_cls=opt.single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix)
+
+ batch_size = min(batch_size, len(dataset))
+ nw = min([os.cpu_count() // world_size, batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = torch.utils.data.distributed.DistributedSampler(dataset) if rank != -1 else None
+ loader = torch.utils.data.DataLoader if image_weights else InfiniteDataLoader
+ # Use torch.utils.data.DataLoader() if dataset.properties will update during training else InfiniteDataLoader()
+ dataloader = loader(dataset,
+ batch_size=batch_size,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn)
+ return dataloader, dataset
+
+
+class InfiniteDataLoader(torch.utils.data.dataloader.DataLoader):
+ """ Dataloader that reuses workers
+
+ Uses same syntax as vanilla DataLoader
+ """
+
+ def __init__(self, *args, **kwargs):
+ super().__init__(*args, **kwargs)
+ object.__setattr__(self, 'batch_sampler', _RepeatSampler(self.batch_sampler))
+ self.iterator = super().__iter__()
+
+ def __len__(self):
+ return len(self.batch_sampler.sampler)
+
+ def __iter__(self):
+ for i in range(len(self)):
+ yield next(self.iterator)
+
+
+class _RepeatSampler(object):
+ """ Sampler that repeats forever
+
+ Args:
+ sampler (Sampler)
+ """
+
+ def __init__(self, sampler):
+ self.sampler = sampler
+
+ def __iter__(self):
+ while True:
+ yield from iter(self.sampler)
+
+
+class LoadImages: # for inference
+ def __init__(self, path, img_size=640, stride=32):
+ p = str(Path(path).absolute()) # os-agnostic absolute path
+ if '*' in p:
+ files = sorted(glob.glob(p, recursive=True)) # glob
+ elif os.path.isdir(p):
+ files = sorted(glob.glob(os.path.join(p, '*.*'))) # dir
+ elif os.path.isfile(p):
+ files = [p] # files
+ else:
+ raise Exception(f'ERROR: {p} does not exist')
+
+ images = [x for x in files if x.split('.')[-1].lower() in img_formats]
+ videos = [x for x in files if x.split('.')[-1].lower() in vid_formats]
+ ni, nv = len(images), len(videos)
+
+ self.img_size = img_size
+ self.stride = stride
+ self.files = images + videos
+ self.nf = ni + nv # number of files
+ self.video_flag = [False] * ni + [True] * nv
+ self.mode = 'image'
+ if any(videos):
+ self.new_video(videos[0]) # new video
+ else:
+ self.cap = None
+ assert self.nf > 0, f'No images or videos found in {p}. ' \
+ f'Supported formats are:\nimages: {img_formats}\nvideos: {vid_formats}'
+
+ def __iter__(self):
+ self.count = 0
+ return self
+
+ def __next__(self):
+ if self.count == self.nf:
+ raise StopIteration
+ path = self.files[self.count]
+ if "\\" in path:
+ path = path.replace("\\", "/")
+ path = path.replace("\t", "/t")
+
+ if self.video_flag[self.count]:
+ # Read video
+ self.mode = 'video'
+ ret_val, img0 = self.cap.read()
+ if not ret_val:
+ self.count += 1
+ self.cap.release()
+ if self.count == self.nf: # last video
+ raise StopIteration
+ else:
+ path = self.files[self.count]
+ if "\\" in path:
+ path = path.replace("\\", "/")
+ path = path.replace("\t", "/t")
+ self.new_video(path)
+ ret_val, img0 = self.cap.read()
+
+ self.frame += 1
+ print(f'video {self.count + 1}/{self.nf} ({self.frame}/{self.nframes}) {path}: ', end='')
+
+ else:
+ # Read image
+ self.count += 1
+ img0 = cv2.imread(path) # BGR
+ assert img0 is not None, 'Image Not Found ' + path
+ #print(f'image {self.count}/{self.nf} {path}: ', end='')
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return path, img, img0, self.cap
+
+ def new_video(self, path):
+ self.frame = 0
+ self.cap = cv2.VideoCapture(path)
+ self.nframes = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
+
+ def __len__(self):
+ return self.nf # number of files
+
+
+class LoadWebcam: # for inference
+ def __init__(self, pipe='0', img_size=640, stride=32):
+ self.img_size = img_size
+ self.stride = stride
+
+ if pipe.isnumeric():
+ pipe = eval(pipe) # local camera
+ # pipe = 'rtsp://192.168.1.64/1' # IP camera
+ # pipe = 'rtsp://username:password@192.168.1.64/1' # IP camera with login
+ # pipe = 'http://wmccpinetop.axiscam.net/mjpg/video.mjpg' # IP golf camera
+
+ self.pipe = pipe
+ self.cap = cv2.VideoCapture(pipe) # video capture object
+ self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ self.cap.release()
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Read frame
+ if self.pipe == 0: # local camera
+ ret_val, img0 = self.cap.read()
+ img0 = cv2.flip(img0, 1) # flip left-right
+ else: # IP camera
+ n = 0
+ while True:
+ n += 1
+ self.cap.grab()
+ if n % 30 == 0: # skip frames
+ ret_val, img0 = self.cap.retrieve()
+ if ret_val:
+ break
+
+ # Print
+ assert ret_val, f'Camera Error {self.pipe}'
+ img_path = 'webcam.jpg'
+ print(f'webcam {self.count}: ', end='')
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return img_path, img, img0, None
+
+ def __len__(self):
+ return 0
+
+
+class LoadStreams: # multiple IP or RTSP cameras
+ def __init__(self, sources='streams.txt', img_size=640, stride=32):
+ self.mode = 'stream'
+ self.img_size = img_size
+ self.stride = stride
+
+ if os.path.isfile(sources):
+ with open(sources, 'r') as f:
+ sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
+ else:
+ sources = [sources]
+
+ n = len(sources)
+ self.imgs = [None] * n
+ self.sources = [clean_str(x) for x in sources] # clean source names for later
+ for i, s in enumerate(sources):
+ # Start the thread to read frames from the video stream
+ print(f'{i + 1}/{n}: {s}... ', end='')
+ url = eval(s) if s.isnumeric() else s
+ if 'youtube.com/' in str(url) or 'youtu.be/' in str(url): # if source is YouTube video
+ check_requirements(('pafy', 'youtube_dl'))
+ import pafy
+ url = pafy.new(url).getbest(preftype="mp4").url
+ cap = cv2.VideoCapture(url)
+ assert cap.isOpened(), f'Failed to open {s}'
+ w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ self.fps = cap.get(cv2.CAP_PROP_FPS) % 100
+
+ _, self.imgs[i] = cap.read() # guarantee first frame
+ thread = Thread(target=self.update, args=([i, cap]), daemon=True)
+ print(f' success ({w}x{h} at {self.fps:.2f} FPS).')
+ thread.start()
+ print('') # newline
+
+ # check for common shapes
+ s = np.stack([letterbox(x, self.img_size, stride=self.stride)[0].shape for x in self.imgs], 0) # shapes
+ self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
+ if not self.rect:
+ print('WARNING: Different stream shapes detected. For optimal performance supply similarly-shaped streams.')
+
+ def update(self, index, cap):
+ # Read next stream frame in a daemon thread
+ n = 0
+ while cap.isOpened():
+ n += 1
+ # _, self.imgs[index] = cap.read()
+ cap.grab()
+ if n == 4: # read every 4th frame
+ success, im = cap.retrieve()
+ self.imgs[index] = im if success else self.imgs[index] * 0
+ n = 0
+ time.sleep(1 / self.fps) # wait time
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ img0 = self.imgs.copy()
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Letterbox
+ img = [letterbox(x, self.img_size, auto=self.rect, stride=self.stride)[0] for x in img0]
+
+ # Stack
+ img = np.stack(img, 0)
+
+ # Convert
+ img = img[:, :, :, ::-1].transpose(0, 3, 1, 2) # BGR to RGB, to bsx3x416x416
+ img = np.ascontiguousarray(img)
+
+ return self.sources, img, img0, None
+
+ def __len__(self):
+ return 0 # 1E12 frames = 32 streams at 30 FPS for 30 years
+
+
+def img2label_paths(img_paths):
+ # Define label paths as a function of image paths
+ sa, sb = os.sep + 'images' + os.sep, os.sep + 'labels' + os.sep # /images/, /labels/ substrings
+ return ['txt'.join(x.replace(sa, sb, 1).rsplit(x.split('.')[-1], 1)) for x in img_paths]
+
+
+class LoadImagesAndLabels(Dataset): # for training/testing
+ def __init__(self, path, img_size=640, batch_size=16, augment=False, hyp=None, rect=False, image_weights=False,
+ cache_images=False, single_cls=False, stride=32, pad=0.0, prefix=''):
+ self.img_size = img_size
+ self.augment = augment
+ self.hyp = hyp
+ self.image_weights = image_weights
+ self.rect = False if image_weights else rect
+ self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
+ self.mosaic_border = [-img_size // 2, -img_size // 2]
+ self.stride = stride
+ self.path = path
+ #self.albumentations = Albumentations() if augment else None
+
+ try:
+ f = [] # image files
+ for p in path if isinstance(path, list) else [path]:
+ p = Path(p) # os-agnostic
+ if p.is_dir(): # dir
+ f += glob.glob(str(p / '**' / '*.*'), recursive=True)
+ # f = list(p.rglob('**/*.*')) # pathlib
+ elif p.is_file(): # file
+ with open(p, 'r') as t:
+ t = t.read().strip().splitlines()
+ parent = str(p.parent) + os.sep
+ f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
+ # f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
+ else:
+ raise Exception(f'{prefix}{p} does not exist')
+ self.img_files = sorted([x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in img_formats])
+ # self.img_files = sorted([x for x in f if x.suffix[1:].lower() in img_formats]) # pathlib
+ assert self.img_files, f'{prefix}No images found'
+ except Exception as e:
+ raise Exception(f'{prefix}Error loading data from {path}: {e}\nSee {help_url}')
+
+ # Check cache
+ self.label_files = img2label_paths(self.img_files) # labels
+ cache_path = (p if p.is_file() else Path(self.label_files[0]).parent).with_suffix('.cache') # cached labels
+ if cache_path.is_file():
+ cache, exists = torch.load(cache_path), True # load
+ #if cache['hash'] != get_hash(self.label_files + self.img_files) or 'version' not in cache: # changed
+ # cache, exists = self.cache_labels(cache_path, prefix), False # re-cache
+ else:
+ cache, exists = self.cache_labels(cache_path, prefix), False # cache
+
+ # Display cache
+ nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupted, total
+ if exists:
+ d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupted"
+ tqdm(None, desc=prefix + d, total=n, initial=n) # display cache results
+ assert nf > 0 or not augment, f'{prefix}No labels in {cache_path}. Can not train without labels. See {help_url}'
+
+ # Read cache
+ cache.pop('hash') # remove hash
+ cache.pop('version') # remove version
+ labels, shapes, self.segments = zip(*cache.values())
+ self.labels = list(labels)
+ self.shapes = np.array(shapes, dtype=np.float64)
+ self.img_files = list(cache.keys()) # update
+ self.label_files = img2label_paths(cache.keys()) # update
+ if single_cls:
+ for x in self.labels:
+ x[:, 0] = 0
+
+ n = len(shapes) # number of images
+ bi = np.floor(np.arange(n) / batch_size).astype(int) # batch index
+ nb = bi[-1] + 1 # number of batches
+ self.batch = bi # batch index of image
+ self.n = n
+ self.indices = range(n)
+
+ # Rectangular Training
+ if self.rect:
+ # Sort by aspect ratio
+ s = self.shapes # wh
+ ar = s[:, 1] / s[:, 0] # aspect ratio
+ irect = ar.argsort()
+ self.img_files = [self.img_files[i] for i in irect]
+ self.label_files = [self.label_files[i] for i in irect]
+ self.labels = [self.labels[i] for i in irect]
+ self.shapes = s[irect] # wh
+ ar = ar[irect]
+
+ # Set training image shapes
+ shapes = [[1, 1]] * nb
+ for i in range(nb):
+ ari = ar[bi == i]
+ mini, maxi = ari.min(), ari.max()
+ if maxi < 1:
+ shapes[i] = [maxi, 1]
+ elif mini > 1:
+ shapes[i] = [1, 1 / mini]
+
+ self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(int) * stride
+
+ # Cache images into memory for faster training (WARNING: large datasets may exceed system RAM)
+ self.imgs = [None] * n
+ if cache_images:
+ if cache_images == 'disk':
+ self.im_cache_dir = Path(Path(self.img_files[0]).parent.as_posix() + '_npy')
+ self.img_npy = [self.im_cache_dir / Path(f).with_suffix('.npy').name for f in self.img_files]
+ self.im_cache_dir.mkdir(parents=True, exist_ok=True)
+ gb = 0 # Gigabytes of cached images
+ self.img_hw0, self.img_hw = [None] * n, [None] * n
+ results = ThreadPool(8).imap(lambda x: load_image(*x), zip(repeat(self), range(n)))
+ pbar = tqdm(enumerate(results), total=n)
+ for i, x in pbar:
+ if cache_images == 'disk':
+ if not self.img_npy[i].exists():
+ np.save(self.img_npy[i].as_posix(), x[0])
+ gb += self.img_npy[i].stat().st_size
+ else:
+ self.imgs[i], self.img_hw0[i], self.img_hw[i] = x
+ gb += self.imgs[i].nbytes
+ pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB)'
+ pbar.close()
+
+ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
+ # Cache dataset labels, check images and read shapes
+ x = {} # dict
+ nm, nf, ne, nc = 0, 0, 0, 0 # number missing, found, empty, duplicate
+ pbar = tqdm(zip(self.img_files, self.label_files), desc='Scanning images', total=len(self.img_files))
+ for i, (im_file, lb_file) in enumerate(pbar):
+ try:
+ # verify images
+ im = Image.open(im_file)
+ im.verify() # PIL verify
+ shape = exif_size(im) # image size
+ segments = [] # instance segments
+ assert (shape[0] > 9) & (shape[1] > 9), f'image size {shape} <10 pixels'
+ assert im.format.lower() in img_formats, f'invalid image format {im.format}'
+
+ # verify labels
+ if os.path.isfile(lb_file):
+ nf += 1 # label found
+ with open(lb_file, 'r') as f:
+ l = [x.split() for x in f.read().strip().splitlines()]
+ if any([len(x) > 8 for x in l]): # is segment
+ classes = np.array([x[0] for x in l], dtype=np.float32)
+ segments = [np.array(x[1:], dtype=np.float32).reshape(-1, 2) for x in l] # (cls, xy1...)
+ l = np.concatenate((classes.reshape(-1, 1), segments2boxes(segments)), 1) # (cls, xywh)
+ l = np.array(l, dtype=np.float32)
+ if len(l):
+ assert l.shape[1] == 5, 'labels require 5 columns each'
+ assert (l >= 0).all(), 'negative labels'
+ assert (l[:, 1:] <= 1).all(), 'non-normalized or out of bounds coordinate labels'
+ assert np.unique(l, axis=0).shape[0] == l.shape[0], 'duplicate labels'
+ else:
+ ne += 1 # label empty
+ l = np.zeros((0, 5), dtype=np.float32)
+ else:
+ nm += 1 # label missing
+ l = np.zeros((0, 5), dtype=np.float32)
+ x[im_file] = [l, shape, segments]
+ except Exception as e:
+ nc += 1
+ print(f'{prefix}WARNING: Ignoring corrupted image and/or label {im_file}: {e}')
+
+ pbar.desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels... " \
+ f"{nf} found, {nm} missing, {ne} empty, {nc} corrupted"
+ pbar.close()
+
+ if nf == 0:
+ print(f'{prefix}WARNING: No labels found in {path}. See {help_url}')
+
+ x['hash'] = get_hash(self.label_files + self.img_files)
+ x['results'] = nf, nm, ne, nc, i + 1
+ x['version'] = 0.1 # cache version
+ torch.save(x, path) # save for next time
+ logging.info(f'{prefix}New cache created: {path}')
+ return x
+
+ def __len__(self):
+ return len(self.img_files)
+
+ # def __iter__(self):
+ # self.count = -1
+ # print('ran dataset iter')
+ # #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
+ # return self
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ if mosaic:
+ # Load mosaic
+ if random.random() < 0.8:
+ img, labels = load_mosaic(self, index)
+ else:
+ img, labels = load_mosaic9(self, index)
+ shapes = None
+
+ # MixUp https://arxiv.org/pdf/1710.09412.pdf
+ if random.random() < hyp['mixup']:
+ if random.random() < 0.8:
+ img2, labels2 = load_mosaic(self, random.randint(0, len(self.labels) - 1))
+ else:
+ img2, labels2 = load_mosaic9(self, random.randint(0, len(self.labels) - 1))
+ r = np.random.beta(8.0, 8.0) # mixup ratio, alpha=beta=8.0
+ img = (img * r + img2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = load_image(self, index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ # Augment imagespace
+ if not mosaic:
+ img, labels = random_perspective(img, labels,
+ degrees=hyp['degrees'],
+ translate=hyp['translate'],
+ scale=hyp['scale'],
+ shear=hyp['shear'],
+ perspective=hyp['perspective'])
+
+
+ #img, labels = self.albumentations(img, labels)
+
+ # Augment colorspace
+ augment_hsv(img, hgain=hyp['hsv_h'], sgain=hyp['hsv_s'], vgain=hyp['hsv_v'])
+
+ # Apply cutouts
+ # if random.random() < 0.9:
+ # labels = cutout(img, labels)
+
+ if random.random() < hyp['paste_in']:
+ sample_labels, sample_images, sample_masks = [], [], []
+ while len(sample_labels) < 30:
+ sample_labels_, sample_images_, sample_masks_ = load_samples(self, random.randint(0, len(self.labels) - 1))
+ sample_labels += sample_labels_
+ sample_images += sample_images_
+ sample_masks += sample_masks_
+ #print(len(sample_labels))
+ if len(sample_labels) == 0:
+ break
+ labels = pastein(img, labels, sample_labels, sample_images, sample_masks)
+
+ nL = len(labels) # number of labels
+ if nL:
+ labels[:, 1:5] = xyxy2xywh(labels[:, 1:5]) # convert xyxy to xywh
+ labels[:, [2, 4]] /= img.shape[0] # normalized height 0-1
+ labels[:, [1, 3]] /= img.shape[1] # normalized width 0-1
+
+ if self.augment:
+ # flip up-down
+ if random.random() < hyp['flipud']:
+ img = np.flipud(img)
+ if nL:
+ labels[:, 2] = 1 - labels[:, 2]
+
+ # flip left-right
+ if random.random() < hyp['fliplr']:
+ img = np.fliplr(img)
+ if nL:
+ labels[:, 1] = 1 - labels[:, 1]
+
+ labels_out = torch.zeros((nL, 6))
+ if nL:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return torch.from_numpy(img), labels_out, self.img_files[index], shapes
+
+ @staticmethod
+ def collate_fn(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ for i, l in enumerate(label):
+ l[:, 0] = i # add target image index for build_targets()
+ return torch.stack(img, 0), torch.cat(label, 0), path, shapes
+
+ @staticmethod
+ def collate_fn4(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ n = len(shapes) // 4
+ img4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
+
+ ho = torch.tensor([[0., 0, 0, 1, 0, 0]])
+ wo = torch.tensor([[0., 0, 1, 0, 0, 0]])
+ s = torch.tensor([[1, 1, .5, .5, .5, .5]]) # scale
+ for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
+ i *= 4
+ if random.random() < 0.5:
+ im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2., mode='bilinear', align_corners=False)[
+ 0].type(img[i].type())
+ l = label[i]
+ else:
+ im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
+ l = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
+ img4.append(im)
+ label4.append(l)
+
+ for i, l in enumerate(label4):
+ l[:, 0] = i # add target image index for build_targets()
+
+ return torch.stack(img4, 0), torch.cat(label4, 0), path4, shapes4
+
+
+# Ancillary functions --------------------------------------------------------------------------------------------------
+def load_image(self, index):
+ # loads 1 image from dataset, returns img, original hw, resized hw
+ img = self.imgs[index]
+ if img is None: # not cached
+ path = self.img_files[index]
+ if "\\" in path:
+ path = path.replace("\\", "/")
+ path = path.replace("\t", "/t")
+ img = cv2.imread(path) # BGR
+ assert img is not None, 'Image Not Found ' + path
+ h0, w0 = img.shape[:2] # orig hw
+ r = self.img_size / max(h0, w0) # resize image to img_size
+ if r != 1: # always resize down, only resize up if training with augmentation
+ interp = cv2.INTER_AREA if r < 1 and not self.augment else cv2.INTER_LINEAR
+ img = cv2.resize(img, (int(w0 * r), int(h0 * r)), interpolation=interp)
+ return img, (h0, w0), img.shape[:2] # img, hw_original, hw_resized
+ else:
+ return self.imgs[index], self.img_hw0[index], self.img_hw[index] # img, hw_original, hw_resized
+
+
+def augment_hsv(img, hgain=0.5, sgain=0.5, vgain=0.5):
+ r = np.random.uniform(-1, 1, 3) * [hgain, sgain, vgain] + 1 # random gains
+ hue, sat, val = cv2.split(cv2.cvtColor(img, cv2.COLOR_BGR2HSV))
+ dtype = img.dtype # uint8
+
+ x = np.arange(0, 256, dtype=np.int16)
+ lut_hue = ((x * r[0]) % 180).astype(dtype)
+ lut_sat = np.clip(x * r[1], 0, 255).astype(dtype)
+ lut_val = np.clip(x * r[2], 0, 255).astype(dtype)
+
+ img_hsv = cv2.merge((cv2.LUT(hue, lut_hue), cv2.LUT(sat, lut_sat), cv2.LUT(val, lut_val))).astype(dtype)
+ cv2.cvtColor(img_hsv, cv2.COLOR_HSV2BGR, dst=img) # no return needed
+
+
+def hist_equalize(img, clahe=True, bgr=False):
+ # Equalize histogram on BGR image 'img' with img.shape(n,m,3) and range 0-255
+ yuv = cv2.cvtColor(img, cv2.COLOR_BGR2YUV if bgr else cv2.COLOR_RGB2YUV)
+ if clahe:
+ c = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
+ yuv[:, :, 0] = c.apply(yuv[:, :, 0])
+ else:
+ yuv[:, :, 0] = cv2.equalizeHist(yuv[:, :, 0]) # equalize Y channel histogram
+ return cv2.cvtColor(yuv, cv2.COLOR_YUV2BGR if bgr else cv2.COLOR_YUV2RGB) # convert YUV image to RGB
+
+
+def load_mosaic(self, index):
+ # loads images in a 4-mosaic
+
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ #img4, labels4, segments4 = remove_background(img4, labels4, segments4)
+ #sample_segments(img4, labels4, segments4, probability=self.hyp['copy_paste'])
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, probability=self.hyp['copy_paste'])
+ img4, labels4 = random_perspective(img4, labels4, segments4,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img4, labels4
+
+
+def load_mosaic9(self, index):
+ # loads images in a 9-mosaic
+
+ labels9, segments9 = [], []
+ s = self.img_size
+ indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img9
+ if i == 0: # center
+ img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ h0, w0 = h, w
+ c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
+ elif i == 1: # top
+ c = s, s - h, s + w, s
+ elif i == 2: # top right
+ c = s + wp, s - h, s + wp + w, s
+ elif i == 3: # right
+ c = s + w0, s, s + w0 + w, s + h
+ elif i == 4: # bottom right
+ c = s + w0, s + hp, s + w0 + w, s + hp + h
+ elif i == 5: # bottom
+ c = s + w0 - w, s + h0, s + w0, s + h0 + h
+ elif i == 6: # bottom left
+ c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
+ elif i == 7: # left
+ c = s - w, s + h0 - h, s, s + h0
+ elif i == 8: # top left
+ c = s - w, s + h0 - hp - h, s, s + h0 - hp
+
+ padx, pady = c[:2]
+ x1, y1, x2, y2 = [max(x, 0) for x in c] # allocate coords
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
+ labels9.append(labels)
+ segments9.extend(segments)
+
+ # Image
+ img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
+ hp, wp = h, w # height, width previous
+
+ # Offset
+ yc, xc = [int(random.uniform(0, s)) for _ in self.mosaic_border] # mosaic center x, y
+ img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
+
+ # Concat/clip labels
+ labels9 = np.concatenate(labels9, 0)
+ labels9[:, [1, 3]] -= xc
+ labels9[:, [2, 4]] -= yc
+ c = np.array([xc, yc]) # centers
+ segments9 = [x - c for x in segments9]
+
+ for x in (labels9[:, 1:], *segments9):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img9, labels9 = replicate(img9, labels9) # replicate
+
+ # Augment
+ #img9, labels9, segments9 = remove_background(img9, labels9, segments9)
+ img9, labels9, segments9 = copy_paste(img9, labels9, segments9, probability=self.hyp['copy_paste'])
+ img9, labels9 = random_perspective(img9, labels9, segments9,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img9, labels9
+
+
+def load_samples(self, index):
+ # loads images in a 4-mosaic
+
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ #img4, labels4, segments4 = remove_background(img4, labels4, segments4)
+ sample_labels, sample_images, sample_masks = sample_segments(img4, labels4, segments4, probability=0.5)
+
+ return sample_labels, sample_images, sample_masks
+
+
+def copy_paste(img, labels, segments, probability=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ if probability and n:
+ h, w, c = img.shape # height, width, channels
+ im_new = np.zeros(img.shape, np.uint8)
+ for j in random.sample(range(n), k=round(probability * n)):
+ l, s = labels[j], segments[j]
+ box = w - l[3], l[2], w - l[1], l[4]
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
+ labels = np.concatenate((labels, [[l[0], *box]]), 0)
+ segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=img, src2=im_new)
+ result = cv2.flip(result, 1) # augment segments (flip left-right)
+ i = result > 0 # pixels to replace
+ # i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
+ img[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+
+ return img, labels, segments
+
+
+def remove_background(img, labels, segments):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ h, w, c = img.shape # height, width, channels
+ im_new = np.zeros(img.shape, np.uint8)
+ img_new = np.ones(img.shape, np.uint8) * 114
+ for j in range(n):
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=img, src2=im_new)
+
+ i = result > 0 # pixels to replace
+ img_new[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+
+ return img_new, labels, segments
+
+
+def sample_segments(img, labels, segments, probability=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ sample_labels = []
+ sample_images = []
+ sample_masks = []
+ if probability and n:
+ h, w, c = img.shape # height, width, channels
+ for j in random.sample(range(n), k=round(probability * n)):
+ l, s = labels[j], segments[j]
+ box = l[1].astype(int).clip(0,w-1), l[2].astype(int).clip(0,h-1), l[3].astype(int).clip(0,w-1), l[4].astype(int).clip(0,h-1)
+
+ #print(box)
+ if (box[2] <= box[0]) or (box[3] <= box[1]):
+ continue
+
+ sample_labels.append(l[0])
+
+ mask = np.zeros(img.shape, np.uint8)
+
+ cv2.drawContours(mask, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+ sample_masks.append(mask[box[1]:box[3],box[0]:box[2],:])
+
+ result = cv2.bitwise_and(src1=img, src2=mask)
+ i = result > 0 # pixels to replace
+ mask[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+ #print(box)
+ sample_images.append(mask[box[1]:box[3],box[0]:box[2],:])
+
+ return sample_labels, sample_images, sample_masks
+
+
+def replicate(img, labels):
+ # Replicate labels
+ h, w = img.shape[:2]
+ boxes = labels[:, 1:].astype(int)
+ x1, y1, x2, y2 = boxes.T
+ s = ((x2 - x1) + (y2 - y1)) / 2 # side length (pixels)
+ for i in s.argsort()[:round(s.size * 0.5)]: # smallest indices
+ x1b, y1b, x2b, y2b = boxes[i]
+ bh, bw = y2b - y1b, x2b - x1b
+ yc, xc = int(random.uniform(0, h - bh)), int(random.uniform(0, w - bw)) # offset x, y
+ x1a, y1a, x2a, y2a = [xc, yc, xc + bw, yc + bh]
+ img[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ labels = np.append(labels, [[labels[i, 0], x1a, y1a, x2a, y2a]], axis=0)
+
+ return img, labels
+
+
+def letterbox(img, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
+ # Resize and pad image while meeting stride-multiple constraints
+ shape = img.shape[:2] # current shape [height, width]
+ if isinstance(new_shape, int):
+ new_shape = (new_shape, new_shape)
+
+ # Scale ratio (new / old)
+ r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
+ if not scaleup: # only scale down, do not scale up (for better test mAP)
+ r = min(r, 1.0)
+
+ # Compute padding
+ ratio = r, r # width, height ratios
+ new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
+ dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
+ if auto: # minimum rectangle
+ dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
+ elif scaleFill: # stretch
+ dw, dh = 0.0, 0.0
+ new_unpad = (new_shape[1], new_shape[0])
+ ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
+
+ dw /= 2 # divide padding into 2 sides
+ dh /= 2
+
+ if shape[::-1] != new_unpad: # resize
+ img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
+ top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
+ left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
+ img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
+ return img, ratio, (dw, dh)
+
+
+def random_perspective(img, targets=(), segments=(), degrees=10, translate=.1, scale=.1, shear=10, perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = img.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = img.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -img.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -img.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1.1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
+ T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ img = cv2.warpPerspective(img, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ img = cv2.warpAffine(img, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(img[:, :, ::-1]) # base
+ # ax[1].imshow(img2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ if n:
+ use_segments = any(x.any() for x in segments)
+ new = np.zeros((n, 4))
+ if use_segments: # warp segments
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+
+ else: # warp boxes
+ xy = np.ones((n * 4, 3))
+ xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
+
+ # create new boxes
+ x = xy[:, [0, 2, 4, 6]]
+ y = xy[:, [1, 3, 5, 7]]
+ new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
+
+ # clip
+ new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
+ new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+
+ return img, targets
+
+
+def box_candidates(box1, box2, wh_thr=2, ar_thr=20, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
+ # Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
+ w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
+ w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
+ ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
+ return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
+
+
+def bbox_ioa(box1, box2):
+ # Returns the intersection over box2 area given box1, box2. box1 is 4, box2 is nx4. boxes are x1y1x2y2
+ box2 = box2.transpose()
+
+ # Get the coordinates of bounding boxes
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+
+ # Intersection area
+ inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
+ (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)
+
+ # box2 area
+ box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + 1e-16
+
+ # Intersection over box2 area
+ return inter_area / box2_area
+
+
+def cutout(image, labels):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ h, w = image.shape[:2]
+
+ # create random masks
+ scales = [0.5] * 1 + [0.25] * 2 + [0.125] * 4 + [0.0625] * 8 + [0.03125] * 16 # image size fraction
+ for s in scales:
+ mask_h = random.randint(1, int(h * s))
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ # apply random color mask
+ image[ymin:ymax, xmin:xmax] = [random.randint(64, 191) for _ in range(3)]
+
+ # return unobscured labels
+ if len(labels) and s > 0.03:
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ labels = labels[ioa < 0.60] # remove >60% obscured labels
+
+ return labels
+
+
+def pastein(image, labels, sample_labels, sample_images, sample_masks):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ h, w = image.shape[:2]
+
+ # create random masks
+ scales = [0.75] * 2 + [0.5] * 4 + [0.25] * 4 + [0.125] * 4 + [0.0625] * 6 # image size fraction
+ for s in scales:
+ if random.random() < 0.2:
+ continue
+ mask_h = random.randint(1, int(h * s))
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ if len(labels):
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ else:
+ ioa = np.zeros(1)
+
+ if (ioa < 0.30).all() and len(sample_labels) and (xmax > xmin+20) and (ymax > ymin+20): # allow 30% obscuration of existing labels
+ sel_ind = random.randint(0, len(sample_labels)-1)
+ #print(len(sample_labels))
+ #print(sel_ind)
+ #print((xmax-xmin, ymax-ymin))
+ #print(image[ymin:ymax, xmin:xmax].shape)
+ #print([[sample_labels[sel_ind], *box]])
+ #print(labels.shape)
+ hs, ws, cs = sample_images[sel_ind].shape
+ r_scale = min((ymax-ymin)/hs, (xmax-xmin)/ws)
+ r_w = int(ws*r_scale)
+ r_h = int(hs*r_scale)
+
+ if (r_w > 10) and (r_h > 10):
+ r_mask = cv2.resize(sample_masks[sel_ind], (r_w, r_h))
+ r_image = cv2.resize(sample_images[sel_ind], (r_w, r_h))
+ temp_crop = image[ymin:ymin+r_h, xmin:xmin+r_w]
+ m_ind = r_mask > 0
+ if m_ind.astype(np.int32).sum() > 60:
+ temp_crop[m_ind] = r_image[m_ind]
+ #print(sample_labels[sel_ind])
+ #print(sample_images[sel_ind].shape)
+ #print(temp_crop.shape)
+ box = np.array([xmin, ymin, xmin+r_w, ymin+r_h], dtype=np.float32)
+ if len(labels):
+ labels = np.concatenate((labels, [[sample_labels[sel_ind], *box]]), 0)
+ else:
+ labels = np.array([[sample_labels[sel_ind], *box]])
+
+ image[ymin:ymin+r_h, xmin:xmin+r_w] = temp_crop
+
+ return labels
+
+class Albumentations:
+ # YOLOv5 Albumentations class (optional, only used if package is installed)
+ def __init__(self):
+ self.transform = None
+ import albumentations as A
+
+ self.transform = A.Compose([
+ A.CLAHE(p=0.01),
+ A.RandomBrightnessContrast(brightness_limit=0.2, contrast_limit=0.2, p=0.01),
+ A.RandomGamma(gamma_limit=[80, 120], p=0.01),
+ A.Blur(p=0.01),
+ A.MedianBlur(p=0.01),
+ A.ToGray(p=0.01),
+ A.ImageCompression(quality_lower=75, p=0.01),],
+ bbox_params=A.BboxParams(format='pascal_voc', label_fields=['class_labels']))
+
+ #logging.info(colorstr('albumentations: ') + ', '.join(f'{x}' for x in self.transform.transforms if x.p))
+
+ def __call__(self, im, labels, p=1.0):
+ if self.transform and random.random() < p:
+ new = self.transform(image=im, bboxes=labels[:, 1:], class_labels=labels[:, 0]) # transformed
+ im, labels = new['image'], np.array([[c, *b] for c, b in zip(new['class_labels'], new['bboxes'])])
+ return im, labels
+
+
+def create_folder(path='./new'):
+ # Create folder
+ if os.path.exists(path):
+ shutil.rmtree(path) # delete output folder
+ os.makedirs(path) # make new output folder
+
+
+def flatten_recursive(path='../coco'):
+ # Flatten a recursive directory by bringing all files to top level
+ new_path = Path(path + '_flat')
+ create_folder(new_path)
+ for file in tqdm(glob.glob(str(Path(path)) + '/**/*.*', recursive=True)):
+ shutil.copyfile(file, new_path / Path(file).name)
+
+
+def extract_boxes(path='../coco/'): # from utils.datasets import *; extract_boxes('../coco128')
+ # Convert detection dataset into classification dataset, with one directory per class
+
+ path = Path(path) # images dir
+ shutil.rmtree(path / 'classifier') if (path / 'classifier').is_dir() else None # remove existing
+ files = list(path.rglob('*.*'))
+ n = len(files) # number of files
+ for im_file in tqdm(files, total=n):
+ if im_file.suffix[1:] in img_formats:
+ # image
+ im = cv2.imread(str(im_file))[..., ::-1] # BGR to RGB
+ h, w = im.shape[:2]
+
+ # labels
+ lb_file = Path(img2label_paths([str(im_file)])[0])
+ if Path(lb_file).exists():
+ with open(lb_file, 'r') as f:
+ lb = np.array([x.split() for x in f.read().strip().splitlines()], dtype=np.float32) # labels
+
+ for j, x in enumerate(lb):
+ c = int(x[0]) # class
+ f = (path / 'classifier') / f'{c}' / f'{path.stem}_{im_file.stem}_{j}.jpg' # new filename
+ if not f.parent.is_dir():
+ f.parent.mkdir(parents=True)
+
+ b = x[1:] * [w, h, w, h] # box
+ # b[2:] = b[2:].max() # rectangle to square
+ b[2:] = b[2:] * 1.2 + 3 # pad
+ b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
+
+ b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
+ b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
+ assert cv2.imwrite(str(f), im[b[1]:b[3], b[0]:b[2]]), f'box failure in {f}'
+
+
+def autosplit(path='../coco', weights=(0.9, 0.1, 0.0), annotated_only=False):
+ """ Autosplit a dataset into train/val/test splits and save path/autosplit_*.txt files
+ Usage: from utils.datasets import *; autosplit('../coco')
+ Arguments
+ path: Path to images directory
+ weights: Train, val, test weights (list)
+ annotated_only: Only use images with an annotated txt file
+ """
+ path = Path(path) # images dir
+ files = sum([list(path.rglob(f"*.{img_ext}")) for img_ext in img_formats], []) # image files only
+ n = len(files) # number of files
+ indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
+
+ txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
+ [(path / x).unlink() for x in txt if (path / x).exists()] # remove existing
+
+ print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
+ for i, img in tqdm(zip(indices, files), total=n):
+ if not annotated_only or Path(img2label_paths([str(img)])[0]).exists(): # check label
+ with open(path / txt[i], 'a') as f:
+ f.write(str(img) + '\n') # add image to txt file
+
+
+def load_segmentations(self, index):
+ key = '/work/handsomejw66/coco17/' + self.img_files[index]
+ #print(key)
+ # /work/handsomejw66/coco17/
+ return self.segs[key]
diff --git a/ipex/utils/general.py b/ipex/utils/general.py
new file mode 100644
index 000000000..decdcc64e
--- /dev/null
+++ b/ipex/utils/general.py
@@ -0,0 +1,892 @@
+# YOLOR general utils
+
+import glob
+import logging
+import math
+import os
+import platform
+import random
+import re
+import subprocess
+import time
+from pathlib import Path
+
+import cv2
+import numpy as np
+import pandas as pd
+import torch
+import torchvision
+import yaml
+
+from utils.google_utils import gsutil_getsize
+from utils.metrics import fitness
+from utils.torch_utils import init_torch_seeds
+
+# Settings
+torch.set_printoptions(linewidth=320, precision=5, profile='long')
+np.set_printoptions(linewidth=320, formatter={'float_kind': '{:11.5g}'.format}) # format short g, %precision=5
+pd.options.display.max_columns = 10
+cv2.setNumThreads(0) # prevent OpenCV from multithreading (incompatible with PyTorch DataLoader)
+os.environ['NUMEXPR_MAX_THREADS'] = str(min(os.cpu_count(), 8)) # NumExpr max threads
+
+
+def set_logging(rank=-1):
+ logging.basicConfig(
+ format="%(message)s",
+ level=logging.INFO if rank in [-1, 0] else logging.WARN)
+
+
+def init_seeds(seed=0):
+ # Initialize random number generator (RNG) seeds
+ random.seed(seed)
+ np.random.seed(seed)
+ init_torch_seeds(seed)
+
+
+def get_latest_run(search_dir='.'):
+ # Return path to most recent 'last.pt' in /runs (i.e. to --resume from)
+ last_list = glob.glob(f'{search_dir}/**/last*.pt', recursive=True)
+ return max(last_list, key=os.path.getctime) if last_list else ''
+
+
+def isdocker():
+ # Is environment a Docker container
+ return Path('/workspace').exists() # or Path('/.dockerenv').exists()
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+def check_online():
+ # Check internet connectivity
+ import socket
+ try:
+ socket.create_connection(("1.1.1.1", 443), 5) # check host accesability
+ return True
+ except OSError:
+ return False
+
+
+def check_git_status():
+ # Recommend 'git pull' if code is out of date
+ print(colorstr('github: '), end='')
+ try:
+ assert Path('.git').exists(), 'skipping check (not a git repository)'
+ assert not isdocker(), 'skipping check (Docker image)'
+ assert check_online(), 'skipping check (offline)'
+
+ cmd = 'git fetch && git config --get remote.origin.url'
+ url = subprocess.check_output(cmd, shell=True).decode().strip().rstrip('.git') # github repo url
+ branch = subprocess.check_output('git rev-parse --abbrev-ref HEAD', shell=True).decode().strip() # checked out
+ n = int(subprocess.check_output(f'git rev-list {branch}..origin/master --count', shell=True)) # commits behind
+ if n > 0:
+ s = f"⚠️ WARNING: code is out of date by {n} commit{'s' * (n > 1)}. " \
+ f"Use 'git pull' to update or 'git clone {url}' to download latest."
+ else:
+ s = f'up to date with {url} ✅'
+ print(emojis(s)) # emoji-safe
+ except Exception as e:
+ print(e)
+
+
+def check_requirements(requirements='requirements.txt', exclude=()):
+ # Check installed dependencies meet requirements (pass *.txt file or list of packages)
+ import pkg_resources as pkg
+ prefix = colorstr('red', 'bold', 'requirements:')
+ if isinstance(requirements, (str, Path)): # requirements.txt file
+ file = Path(requirements)
+ if not file.exists():
+ print(f"{prefix} {file.resolve()} not found, check failed.")
+ return
+ requirements = [f'{x.name}{x.specifier}' for x in pkg.parse_requirements(file.open()) if x.name not in exclude]
+ else: # list or tuple of packages
+ requirements = [x for x in requirements if x not in exclude]
+
+ n = 0 # number of packages updates
+ for r in requirements:
+ try:
+ pkg.require(r)
+ except Exception as e: # DistributionNotFound or VersionConflict if requirements not met
+ n += 1
+ print(f"{prefix} {e.req} not found and is required by YOLOR, attempting auto-update...")
+ print(subprocess.check_output(f"pip install '{e.req}'", shell=True).decode())
+
+ if n: # if packages updated
+ source = file.resolve() if 'file' in locals() else requirements
+ s = f"{prefix} {n} package{'s' * (n > 1)} updated per {source}\n" \
+ f"{prefix} ⚠️ {colorstr('bold', 'Restart runtime or rerun command for updates to take effect')}\n"
+ print(emojis(s)) # emoji-safe
+
+
+def check_img_size(img_size, s=32):
+ # Verify img_size is a multiple of stride s
+ new_size = make_divisible(img_size, int(s)) # ceil gs-multiple
+ if new_size != img_size:
+ print('WARNING: --img-size %g must be multiple of max stride %g, updating to %g' % (img_size, s, new_size))
+ return new_size
+
+
+def check_imshow():
+ # Check if environment supports image displays
+ try:
+ assert not isdocker(), 'cv2.imshow() is disabled in Docker environments'
+ cv2.imshow('test', np.zeros((1, 1, 3)))
+ cv2.waitKey(1)
+ cv2.destroyAllWindows()
+ cv2.waitKey(1)
+ return True
+ except Exception as e:
+ print(f'WARNING: Environment does not support cv2.imshow() or PIL Image.show() image displays\n{e}')
+ return False
+
+
+def check_file(file):
+ # Search for file if not found
+ if Path(file).is_file() or file == '':
+ return file
+ else:
+ files = glob.glob('./**/' + file, recursive=True) # find file
+ assert len(files), f'File Not Found: {file}' # assert file was found
+ assert len(files) == 1, f"Multiple files match '{file}', specify exact path: {files}" # assert unique
+ return files[0] # return file
+
+
+def check_dataset(dict):
+ # Download dataset if not found locally
+ val, s = dict.get('val'), dict.get('download')
+ if val and len(val):
+ val = [Path(x).resolve() for x in (val if isinstance(val, list) else [val])] # val path
+ if not all(x.exists() for x in val):
+ print('\nWARNING: Dataset not found, nonexistent paths: %s' % [str(x) for x in val if not x.exists()])
+ if s and len(s): # download script
+ print('Downloading %s ...' % s)
+ if s.startswith('http') and s.endswith('.zip'): # URL
+ f = Path(s).name # filename
+ torch.hub.download_url_to_file(s, f)
+ r = os.system('unzip -q %s -d ../ && rm %s' % (f, f)) # unzip
+ else: # bash script
+ r = os.system(s)
+ print('Dataset autodownload %s\n' % ('success' if r == 0 else 'failure')) # analyze return value
+ else:
+ raise Exception('Dataset not found.')
+
+
+def make_divisible(x, divisor):
+ # Returns x evenly divisible by divisor
+ return math.ceil(x / divisor) * divisor
+
+
+def clean_str(s):
+ # Cleans a string by replacing special characters with underscore _
+ return re.sub(pattern="[|@#!¡·$€%&()=?¿^*;:,¨´><+]", repl="_", string=s)
+
+
+def one_cycle(y1=0.0, y2=1.0, steps=100):
+ # lambda function for sinusoidal ramp from y1 to y2
+ return lambda x: ((1 - math.cos(x * math.pi / steps)) / 2) * (y2 - y1) + y1
+
+
+def colorstr(*input):
+ # Colors a string https://en.wikipedia.org/wiki/ANSI_escape_code, i.e. colorstr('blue', 'hello world')
+ *args, string = input if len(input) > 1 else ('blue', 'bold', input[0]) # color arguments, string
+ colors = {'black': '\033[30m', # basic colors
+ 'red': '\033[31m',
+ 'green': '\033[32m',
+ 'yellow': '\033[33m',
+ 'blue': '\033[34m',
+ 'magenta': '\033[35m',
+ 'cyan': '\033[36m',
+ 'white': '\033[37m',
+ 'bright_black': '\033[90m', # bright colors
+ 'bright_red': '\033[91m',
+ 'bright_green': '\033[92m',
+ 'bright_yellow': '\033[93m',
+ 'bright_blue': '\033[94m',
+ 'bright_magenta': '\033[95m',
+ 'bright_cyan': '\033[96m',
+ 'bright_white': '\033[97m',
+ 'end': '\033[0m', # misc
+ 'bold': '\033[1m',
+ 'underline': '\033[4m'}
+ return ''.join(colors[x] for x in args) + f'{string}' + colors['end']
+
+
+def labels_to_class_weights(labels, nc=80):
+ # Get class weights (inverse frequency) from training labels
+ if labels[0] is None: # no labels loaded
+ return torch.Tensor()
+
+ labels = np.concatenate(labels, 0) # labels.shape = (866643, 5) for COCO
+ classes = labels[:, 0].astype(np.int32) # labels = [class xywh]
+ weights = np.bincount(classes, minlength=nc) # occurrences per class
+
+ # Prepend gridpoint count (for uCE training)
+ # gpi = ((320 / 32 * np.array([1, 2, 4])) ** 2 * 3).sum() # gridpoints per image
+ # weights = np.hstack([gpi * len(labels) - weights.sum() * 9, weights * 9]) ** 0.5 # prepend gridpoints to start
+
+ weights[weights == 0] = 1 # replace empty bins with 1
+ weights = 1 / weights # number of targets per class
+ weights /= weights.sum() # normalize
+ return torch.from_numpy(weights)
+
+
+def labels_to_image_weights(labels, nc=80, class_weights=np.ones(80)):
+ # Produces image weights based on class_weights and image contents
+ class_counts = np.array([np.bincount(x[:, 0].astype(np.int32), minlength=nc) for x in labels])
+ image_weights = (class_weights.reshape(1, nc) * class_counts).sum(1)
+ # index = random.choices(range(n), weights=image_weights, k=1) # weight image sample
+ return image_weights
+
+
+def coco80_to_coco91_class(): # converts 80-index (val2014) to 91-index (paper)
+ # https://tech.amikelive.com/node-718/what-object-categories-labels-are-in-coco-dataset/
+ # a = np.loadtxt('data/coco.names', dtype='str', delimiter='\n')
+ # b = np.loadtxt('data/coco_paper.names', dtype='str', delimiter='\n')
+ # x1 = [list(a[i] == b).index(True) + 1 for i in range(80)] # darknet to coco
+ # x2 = [list(b[i] == a).index(True) if any(b[i] == a) else None for i in range(91)] # coco to darknet
+ x = [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 27, 28, 31, 32, 33, 34,
+ 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63,
+ 64, 65, 67, 70, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 84, 85, 86, 87, 88, 89, 90]
+ return x
+
+
+def xyxy2xywh(x):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = (x[:, 0] + x[:, 2]) / 2 # x center
+ y[:, 1] = (x[:, 1] + x[:, 3]) / 2 # y center
+ y[:, 2] = x[:, 2] - x[:, 0] # width
+ y[:, 3] = x[:, 3] - x[:, 1] # height
+ return y
+
+
+def xywh2xyxy(x):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
+ y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
+ y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
+ y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
+ return y
+
+
+def xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):
+ # Convert nx4 boxes from [x, y, w, h] normalized to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * (x[:, 0] - x[:, 2] / 2) + padw # top left x
+ y[:, 1] = h * (x[:, 1] - x[:, 3] / 2) + padh # top left y
+ y[:, 2] = w * (x[:, 0] + x[:, 2] / 2) + padw # bottom right x
+ y[:, 3] = h * (x[:, 1] + x[:, 3] / 2) + padh # bottom right y
+ return y
+
+
+def xyn2xy(x, w=640, h=640, padw=0, padh=0):
+ # Convert normalized segments into pixel segments, shape (n,2)
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * x[:, 0] + padw # top left x
+ y[:, 1] = h * x[:, 1] + padh # top left y
+ return y
+
+
+def segment2box(segment, width=640, height=640):
+ # Convert 1 segment label to 1 box label, applying inside-image constraint, i.e. (xy1, xy2, ...) to (xyxy)
+ x, y = segment.T # segment xy
+ inside = (x >= 0) & (y >= 0) & (x <= width) & (y <= height)
+ x, y, = x[inside], y[inside]
+ return np.array([x.min(), y.min(), x.max(), y.max()]) if any(x) else np.zeros((1, 4)) # xyxy
+
+
+def segments2boxes(segments):
+ # Convert segment labels to box labels, i.e. (cls, xy1, xy2, ...) to (cls, xywh)
+ boxes = []
+ for s in segments:
+ x, y = s.T # segment xy
+ boxes.append([x.min(), y.min(), x.max(), y.max()]) # cls, xyxy
+ return xyxy2xywh(np.array(boxes)) # cls, xywh
+
+
+def resample_segments(segments, n=1000):
+ # Up-sample an (n,2) segment
+ for i, s in enumerate(segments):
+ s = np.concatenate((s, s[0:1, :]), axis=0)
+ x = np.linspace(0, len(s) - 1, n)
+ xp = np.arange(len(s))
+ segments[i] = np.concatenate([np.interp(x, xp, s[:, i]) for i in range(2)]).reshape(2, -1).T # segment xy
+ return segments
+
+
+def scale_coords(img1_shape, coords, img0_shape, ratio_pad=None):
+ # Rescale coords (xyxy) from img1_shape to img0_shape
+ if ratio_pad is None: # calculate from img0_shape
+ gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
+ pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
+ else:
+ gain = ratio_pad[0][0]
+ pad = ratio_pad[1]
+
+ coords[:, [0, 2]] -= pad[0] # x padding
+ coords[:, [1, 3]] -= pad[1] # y padding
+ coords[:, :4] /= gain
+ clip_coords(coords, img0_shape)
+ return coords
+
+
+def clip_coords(boxes, img_shape):
+ # Clip bounding xyxy bounding boxes to image shape (height, width)
+ boxes[:, 0].clamp_(0, img_shape[1]) # x1
+ boxes[:, 1].clamp_(0, img_shape[0]) # y1
+ boxes[:, 2].clamp_(0, img_shape[1]) # x2
+ boxes[:, 3].clamp_(0, img_shape[0]) # y2
+
+
+def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
+ box2 = box2.T
+
+ # Get the coordinates of bounding boxes
+ if x1y1x2y2: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ else: # transform from xywh to xyxy
+ b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
+ b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
+ b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
+ b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ iou = inter / union
+
+ if GIoU or DIoU or CIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
+ (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
+ if DIoU:
+ return iou - rho2 / c2 # DIoU
+ elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
+ with torch.no_grad():
+ alpha = v / (v - iou + (1 + eps))
+ return iou - (rho2 / c2 + v * alpha) # CIoU
+ else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ c_area = cw * ch + eps # convex area
+ return iou - (c_area - union) / c_area # GIoU
+ else:
+ return iou # IoU
+
+
+
+
+def bbox_alpha_iou(box1, box2, x1y1x2y2=False, GIoU=False, DIoU=False, CIoU=False, alpha=2, eps=1e-9):
+ # Returns tsqrt_he IoU of box1 to box2. box1 is 4, box2 is nx4
+ box2 = box2.T
+
+ # Get the coordinates of bounding boxes
+ if x1y1x2y2: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ else: # transform from xywh to xyxy
+ b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
+ b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
+ b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
+ b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ # change iou into pow(iou+eps)
+ # iou = inter / union
+ iou = torch.pow(inter/union + eps, alpha)
+ # beta = 2 * alpha
+ if GIoU or DIoU or CIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal
+ rho_x = torch.abs(b2_x1 + b2_x2 - b1_x1 - b1_x2)
+ rho_y = torch.abs(b2_y1 + b2_y2 - b1_y1 - b1_y2)
+ rho2 = ((rho_x ** 2 + rho_y ** 2) / 4) ** alpha # center distance
+ if DIoU:
+ return iou - rho2 / c2 # DIoU
+ elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
+ with torch.no_grad():
+ alpha_ciou = v / ((1 + eps) - inter / union + v)
+ # return iou - (rho2 / c2 + v * alpha_ciou) # CIoU
+ return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
+ else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ # c_area = cw * ch + eps # convex area
+ # return iou - (c_area - union) / c_area # GIoU
+ c_area = torch.max(cw * ch + eps, union) # convex area
+ return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU
+ else:
+ return iou # torch.log(iou+eps) or iou
+
+
+def box_iou(box1, box2):
+ # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ box1 (Tensor[N, 4])
+ box2 (Tensor[M, 4])
+ Returns:
+ iou (Tensor[N, M]): the NxM matrix containing the pairwise
+ IoU values for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ return inter / (area1[:, None] + area2 - inter) # iou = inter / (area1 + area2 - inter)
+
+
+def wh_iou(wh1, wh2):
+ # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
+ wh1 = wh1[:, None] # [N,1,2]
+ wh2 = wh2[None] # [1,M,2]
+ inter = torch.min(wh1, wh2).prod(2) # [N,M]
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter) # iou = inter / (area1 + area2 - inter)
+
+
+def box_giou(box1, box2):
+ """
+ Return generalized intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise generalized IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ areai = whi[:, :, 0] * whi[:, :, 1]
+
+ return iou - (areai - union) / areai
+
+
+def box_ciou(box1, box2, eps: float = 1e-7):
+ """
+ Return complete intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ eps (float, optional): small number to prevent division by zero. Default: 1e-7
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise complete IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ diagonal_distance_squared = (whi[:, :, 0] ** 2) + (whi[:, :, 1] ** 2) + eps
+
+ # centers of boxes
+ x_p = (box1[:, None, 0] + box1[:, None, 2]) / 2
+ y_p = (box1[:, None, 1] + box1[:, None, 3]) / 2
+ x_g = (box2[:, 0] + box2[:, 2]) / 2
+ y_g = (box2[:, 1] + box2[:, 3]) / 2
+ # The distance between boxes' centers squared.
+ centers_distance_squared = (x_p - x_g) ** 2 + (y_p - y_g) ** 2
+
+ w_pred = box1[:, None, 2] - box1[:, None, 0]
+ h_pred = box1[:, None, 3] - box1[:, None, 1]
+
+ w_gt = box2[:, 2] - box2[:, 0]
+ h_gt = box2[:, 3] - box2[:, 1]
+
+ v = (4 / (torch.pi ** 2)) * torch.pow((torch.atan(w_gt / h_gt) - torch.atan(w_pred / h_pred)), 2)
+ with torch.no_grad():
+ alpha = v / (1 - iou + v + eps)
+ return iou - (centers_distance_squared / diagonal_distance_squared) - alpha * v
+
+
+def box_diou(box1, box2, eps: float = 1e-7):
+ """
+ Return distance intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ eps (float, optional): small number to prevent division by zero. Default: 1e-7
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise distance IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ diagonal_distance_squared = (whi[:, :, 0] ** 2) + (whi[:, :, 1] ** 2) + eps
+
+ # centers of boxes
+ x_p = (box1[:, None, 0] + box1[:, None, 2]) / 2
+ y_p = (box1[:, None, 1] + box1[:, None, 3]) / 2
+ x_g = (box2[:, 0] + box2[:, 2]) / 2
+ y_g = (box2[:, 1] + box2[:, 3]) / 2
+ # The distance between boxes' centers squared.
+ centers_distance_squared = (x_p - x_g) ** 2 + (y_p - y_g) ** 2
+
+ # The distance IoU is the IoU penalized by a normalized
+ # distance between boxes' centers squared.
+ return iou - (centers_distance_squared / diagonal_distance_squared)
+
+
+def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
+ labels=()):
+ """Runs Non-Maximum Suppression (NMS) on inference results
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+
+ nc = prediction.shape[2] - 5 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Settings
+ min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
+ max_det = 300 # maximum number of detections per image
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 10.0 # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0, 6), device=prediction.device)] * prediction.shape[0]
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ l = labels[xi]
+ v = torch.zeros((len(l), nc + 5), device=x.device)
+ v[:, :4] = l[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ if nc == 1:
+ x[:, 5:] = x[:, 4:5] # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ print(f'WARNING: NMS time limit {time_limit}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def non_max_suppression_kpt(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
+ labels=(), kpt_label=False, nc=None, nkpt=None):
+ """Runs Non-Maximum Suppression (NMS) on inference results
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+ if nc is None:
+ nc = prediction.shape[2] - 5 if not kpt_label else prediction.shape[2] - 56 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Settings
+ min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
+ max_det = 300 # maximum number of detections per image
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 10.0 # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0,6), device=prediction.device)] * prediction.shape[0]
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ l = labels[xi]
+ v = torch.zeros((len(l), nc + 5), device=x.device)
+ v[:, :4] = l[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ x[:, 5:5+nc] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ if not kpt_label:
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+ else:
+ kpts = x[:, 6:]
+ conf, j = x[:, 5:6].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float(), kpts), 1)[conf.view(-1) > conf_thres]
+
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ print(f'WARNING: NMS time limit {time_limit}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def strip_optimizer(f='best.pt', s=''): # from utils.general import *; strip_optimizer()
+ # Strip optimizer from 'f' to finalize training, optionally save as 's'
+ x = torch.load(f, map_location=torch.device('cpu'))
+ if x.get('ema'):
+ x['model'] = x['ema'] # replace model with ema
+ for k in 'optimizer', 'training_results', 'wandb_id', 'ema', 'updates': # keys
+ x[k] = None
+ x['epoch'] = -1
+ x['model'].half() # to FP16
+ for p in x['model'].parameters():
+ p.requires_grad = False
+ torch.save(x, s or f)
+ mb = os.path.getsize(s or f) / 1E6 # filesize
+ print(f"Optimizer stripped from {f},{(' saved as %s,' % s) if s else ''} {mb:.1f}MB")
+
+
+def print_mutation(hyp, results, yaml_file='hyp_evolved.yaml', bucket=''):
+ # Print mutation results to evolve.txt (for use with train.py --evolve)
+ a = '%10s' * len(hyp) % tuple(hyp.keys()) # hyperparam keys
+ b = '%10.3g' * len(hyp) % tuple(hyp.values()) # hyperparam values
+ c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
+ print('\n%s\n%s\nEvolved fitness: %s\n' % (a, b, c))
+
+ if bucket:
+ url = 'gs://%s/evolve.txt' % bucket
+ if gsutil_getsize(url) > (os.path.getsize('evolve.txt') if os.path.exists('evolve.txt') else 0):
+ os.system('gsutil cp %s .' % url) # download evolve.txt if larger than local
+
+ with open('evolve.txt', 'a') as f: # append result
+ f.write(c + b + '\n')
+ x = np.unique(np.loadtxt('evolve.txt', ndmin=2), axis=0) # load unique rows
+ x = x[np.argsort(-fitness(x))] # sort
+ np.savetxt('evolve.txt', x, '%10.3g') # save sort by fitness
+
+ # Save yaml
+ for i, k in enumerate(hyp.keys()):
+ hyp[k] = float(x[0, i + 7])
+ with open(yaml_file, 'w') as f:
+ results = tuple(x[0, :7])
+ c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
+ f.write('# Hyperparameter Evolution Results\n# Generations: %g\n# Metrics: ' % len(x) + c + '\n\n')
+ yaml.dump(hyp, f, sort_keys=False)
+
+ if bucket:
+ os.system('gsutil cp evolve.txt %s gs://%s' % (yaml_file, bucket)) # upload
+
+
+def apply_classifier(x, model, img, im0):
+ # applies a second stage classifier to yolo outputs
+ im0 = [im0] if isinstance(im0, np.ndarray) else im0
+ for i, d in enumerate(x): # per image
+ if d is not None and len(d):
+ d = d.clone()
+
+ # Reshape and pad cutouts
+ b = xyxy2xywh(d[:, :4]) # boxes
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # rectangle to square
+ b[:, 2:] = b[:, 2:] * 1.3 + 30 # pad
+ d[:, :4] = xywh2xyxy(b).long()
+
+ # Rescale boxes from img_size to im0 size
+ scale_coords(img.shape[2:], d[:, :4], im0[i].shape)
+
+ # Classes
+ pred_cls1 = d[:, 5].long()
+ ims = []
+ for j, a in enumerate(d): # per item
+ cutout = im0[i][int(a[1]):int(a[3]), int(a[0]):int(a[2])]
+ im = cv2.resize(cutout, (224, 224)) # BGR
+ # cv2.imwrite('test%i.jpg' % j, cutout)
+
+ im = im[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ im = np.ascontiguousarray(im, dtype=np.float32) # uint8 to float32
+ im /= 255.0 # 0 - 255 to 0.0 - 1.0
+ ims.append(im)
+
+ pred_cls2 = model(torch.Tensor(ims).to(d.device)).argmax(1) # classifier prediction
+ x[i] = x[i][pred_cls1 == pred_cls2] # retain matching class detections
+
+ return x
+
+
+def increment_path(path, exist_ok=True, sep=''):
+ # Increment path, i.e. runs/exp --> runs/exp{sep}0, runs/exp{sep}1 etc.
+ path = Path(path) # os-agnostic
+ if (path.exists() and exist_ok) or (not path.exists()):
+ return str(path)
+ else:
+ dirs = glob.glob(f"{path}{sep}*") # similar paths
+ matches = [re.search(rf"%s{sep}(\d+)" % path.stem, d) for d in dirs]
+ i = [int(m.groups()[0]) for m in matches if m] # indices
+ n = max(i) + 1 if i else 2 # increment number
+ return f"{path}{sep}{n}" # update path
diff --git a/ipex/utils/google_app_engine/Dockerfile b/ipex/utils/google_app_engine/Dockerfile
new file mode 100644
index 000000000..0155618f4
--- /dev/null
+++ b/ipex/utils/google_app_engine/Dockerfile
@@ -0,0 +1,25 @@
+FROM gcr.io/google-appengine/python
+
+# Create a virtualenv for dependencies. This isolates these packages from
+# system-level packages.
+# Use -p python3 or -p python3.7 to select python version. Default is version 2.
+RUN virtualenv /env -p python3
+
+# Setting these environment variables are the same as running
+# source /env/bin/activate.
+ENV VIRTUAL_ENV /env
+ENV PATH /env/bin:$PATH
+
+RUN apt-get update && apt-get install -y python-opencv
+
+# Copy the application's requirements.txt and run pip to install all
+# dependencies into the virtualenv.
+ADD requirements.txt /app/requirements.txt
+RUN pip install -r /app/requirements.txt
+
+# Add the application source code.
+ADD . /app
+
+# Run a WSGI server to serve the application. gunicorn must be declared as
+# a dependency in requirements.txt.
+CMD gunicorn -b :$PORT main:app
diff --git a/ipex/utils/google_app_engine/additional_requirements.txt b/ipex/utils/google_app_engine/additional_requirements.txt
new file mode 100644
index 000000000..5fcc30524
--- /dev/null
+++ b/ipex/utils/google_app_engine/additional_requirements.txt
@@ -0,0 +1,4 @@
+# add these requirements in your app on top of the existing ones
+pip==18.1
+Flask==1.0.2
+gunicorn==19.9.0
diff --git a/ipex/utils/google_app_engine/app.yaml b/ipex/utils/google_app_engine/app.yaml
new file mode 100644
index 000000000..69b8f68b3
--- /dev/null
+++ b/ipex/utils/google_app_engine/app.yaml
@@ -0,0 +1,14 @@
+runtime: custom
+env: flex
+
+service: yolorapp
+
+liveness_check:
+ initial_delay_sec: 600
+
+manual_scaling:
+ instances: 1
+resources:
+ cpu: 1
+ memory_gb: 4
+ disk_size_gb: 20
\ No newline at end of file
diff --git a/ipex/utils/google_utils.py b/ipex/utils/google_utils.py
new file mode 100644
index 000000000..f363408e6
--- /dev/null
+++ b/ipex/utils/google_utils.py
@@ -0,0 +1,123 @@
+# Google utils: https://cloud.google.com/storage/docs/reference/libraries
+
+import os
+import platform
+import subprocess
+import time
+from pathlib import Path
+
+import requests
+import torch
+
+
+def gsutil_getsize(url=''):
+ # gs://bucket/file size https://cloud.google.com/storage/docs/gsutil/commands/du
+ s = subprocess.check_output(f'gsutil du {url}', shell=True).decode('utf-8')
+ return eval(s.split(' ')[0]) if len(s) else 0 # bytes
+
+
+def attempt_download(file, repo='WongKinYiu/yolov7'):
+ # Attempt file download if does not exist
+ file = Path(str(file).strip().replace("'", '').lower())
+
+ if not file.exists():
+ try:
+ response = requests.get(f'https://api.github.com/repos/{repo}/releases/latest').json() # github api
+ assets = [x['name'] for x in response['assets']] # release assets
+ tag = response['tag_name'] # i.e. 'v1.0'
+ except: # fallback plan
+ assets = ['yolov7.pt', 'yolov7-tiny.pt', 'yolov7x.pt', 'yolov7-d6.pt', 'yolov7-e6.pt',
+ 'yolov7-e6e.pt', 'yolov7-w6.pt']
+ tag = subprocess.check_output('git tag', shell=True).decode().split()[-1]
+
+ name = file.name
+ if name in assets:
+ msg = f'{file} missing, try downloading from https://github.com/{repo}/releases/'
+ redundant = False # second download option
+ try: # GitHub
+ url = f'https://github.com/{repo}/releases/download/{tag}/{name}'
+ print(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, file)
+ assert file.exists() and file.stat().st_size > 1E6 # check
+ except Exception as e: # GCP
+ print(f'Download error: {e}')
+ assert redundant, 'No secondary mirror'
+ url = f'https://storage.googleapis.com/{repo}/ckpt/{name}'
+ print(f'Downloading {url} to {file}...')
+ os.system(f'curl -L {url} -o {file}') # torch.hub.download_url_to_file(url, weights)
+ finally:
+ if not file.exists() or file.stat().st_size < 1E6: # check
+ file.unlink(missing_ok=True) # remove partial downloads
+ print(f'ERROR: Download failure: {msg}')
+ print('')
+ return
+
+
+def gdrive_download(id='', file='tmp.zip'):
+ # Downloads a file from Google Drive. from yolov7.utils.google_utils import *; gdrive_download()
+ t = time.time()
+ file = Path(file)
+ cookie = Path('cookie') # gdrive cookie
+ print(f'Downloading https://drive.google.com/uc?export=download&id={id} as {file}... ', end='')
+ file.unlink(missing_ok=True) # remove existing file
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Attempt file download
+ out = "NUL" if platform.system() == "Windows" else "/dev/null"
+ os.system(f'curl -c ./cookie -s -L "drive.google.com/uc?export=download&id={id}" > {out}')
+ if os.path.exists('cookie'): # large file
+ s = f'curl -Lb ./cookie "drive.google.com/uc?export=download&confirm={get_token()}&id={id}" -o {file}'
+ else: # small file
+ s = f'curl -s -L -o {file} "drive.google.com/uc?export=download&id={id}"'
+ r = os.system(s) # execute, capture return
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Error check
+ if r != 0:
+ file.unlink(missing_ok=True) # remove partial
+ print('Download error ') # raise Exception('Download error')
+ return r
+
+ # Unzip if archive
+ if file.suffix == '.zip':
+ print('unzipping... ', end='')
+ os.system(f'unzip -q {file}') # unzip
+ file.unlink() # remove zip to free space
+
+ print(f'Done ({time.time() - t:.1f}s)')
+ return r
+
+
+def get_token(cookie="./cookie"):
+ with open(cookie) as f:
+ for line in f:
+ if "download" in line:
+ return line.split()[-1]
+ return ""
+
+# def upload_blob(bucket_name, source_file_name, destination_blob_name):
+# # Uploads a file to a bucket
+# # https://cloud.google.com/storage/docs/uploading-objects#storage-upload-object-python
+#
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(destination_blob_name)
+#
+# blob.upload_from_filename(source_file_name)
+#
+# print('File {} uploaded to {}.'.format(
+# source_file_name,
+# destination_blob_name))
+#
+#
+# def download_blob(bucket_name, source_blob_name, destination_file_name):
+# # Uploads a blob from a bucket
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(source_blob_name)
+#
+# blob.download_to_filename(destination_file_name)
+#
+# print('Blob {} downloaded to {}.'.format(
+# source_blob_name,
+# destination_file_name))
diff --git a/ipex/utils/loss.py b/ipex/utils/loss.py
new file mode 100644
index 000000000..2b1d968f8
--- /dev/null
+++ b/ipex/utils/loss.py
@@ -0,0 +1,1697 @@
+# Loss functions
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+from utils.general import bbox_iou, bbox_alpha_iou, box_iou, box_giou, box_diou, box_ciou, xywh2xyxy
+from utils.torch_utils import is_parallel
+
+
+def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
+ # return positive, negative label smoothing BCE targets
+ return 1.0 - 0.5 * eps, 0.5 * eps
+
+
+class BCEBlurWithLogitsLoss(nn.Module):
+ # BCEwithLogitLoss() with reduced missing label effects.
+ def __init__(self, alpha=0.05):
+ super(BCEBlurWithLogitsLoss, self).__init__()
+ self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
+ self.alpha = alpha
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ pred = torch.sigmoid(pred) # prob from logits
+ dx = pred - true # reduce only missing label effects
+ # dx = (pred - true).abs() # reduce missing label and false label effects
+ alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
+ loss *= alpha_factor
+ return loss.mean()
+
+
+class SigmoidBin(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, bin_count=10, min=0.0, max=1.0, reg_scale = 2.0, use_loss_regression=True, use_fw_regression=True, BCE_weight=1.0, smooth_eps=0.0):
+ super(SigmoidBin, self).__init__()
+
+ self.bin_count = bin_count
+ self.length = bin_count + 1
+ self.min = min
+ self.max = max
+ self.scale = float(max - min)
+ self.shift = self.scale / 2.0
+
+ self.use_loss_regression = use_loss_regression
+ self.use_fw_regression = use_fw_regression
+ self.reg_scale = reg_scale
+ self.BCE_weight = BCE_weight
+
+ start = min + (self.scale/2.0) / self.bin_count
+ end = max - (self.scale/2.0) / self.bin_count
+ step = self.scale / self.bin_count
+ self.step = step
+ #print(f" start = {start}, end = {end}, step = {step} ")
+
+ bins = torch.range(start, end + 0.0001, step).float()
+ self.register_buffer('bins', bins)
+
+
+ self.cp = 1.0 - 0.5 * smooth_eps
+ self.cn = 0.5 * smooth_eps
+
+ self.BCEbins = nn.BCEWithLogitsLoss(pos_weight=torch.Tensor([BCE_weight]))
+ self.MSELoss = nn.MSELoss()
+
+ def get_length(self):
+ return self.length
+
+ def forward(self, pred):
+ assert pred.shape[-1] == self.length, 'pred.shape[-1]=%d is not equal to self.length=%d' % (pred.shape[-1], self.length)
+
+ pred_reg = (pred[..., 0] * self.reg_scale - self.reg_scale/2.0) * self.step
+ pred_bin = pred[..., 1:(1+self.bin_count)]
+
+ _, bin_idx = torch.max(pred_bin, dim=-1)
+ bin_bias = self.bins[bin_idx]
+
+ if self.use_fw_regression:
+ result = pred_reg + bin_bias
+ else:
+ result = bin_bias
+ result = result.clamp(min=self.min, max=self.max)
+
+ return result
+
+
+ def training_loss(self, pred, target):
+ assert pred.shape[-1] == self.length, 'pred.shape[-1]=%d is not equal to self.length=%d' % (pred.shape[-1], self.length)
+ assert pred.shape[0] == target.shape[0], 'pred.shape=%d is not equal to the target.shape=%d' % (pred.shape[0], target.shape[0])
+ device = pred.device
+
+ pred_reg = (pred[..., 0].sigmoid() * self.reg_scale - self.reg_scale/2.0) * self.step
+ pred_bin = pred[..., 1:(1+self.bin_count)]
+
+ diff_bin_target = torch.abs(target[..., None] - self.bins)
+ _, bin_idx = torch.min(diff_bin_target, dim=-1)
+
+ bin_bias = self.bins[bin_idx]
+ bin_bias.requires_grad = False
+ result = pred_reg + bin_bias
+
+ target_bins = torch.full_like(pred_bin, self.cn, device=device) # targets
+ n = pred.shape[0]
+ target_bins[range(n), bin_idx] = self.cp
+
+ loss_bin = self.BCEbins(pred_bin, target_bins) # BCE
+
+ if self.use_loss_regression:
+ loss_regression = self.MSELoss(result, target) # MSE
+ loss = loss_bin + loss_regression
+ else:
+ loss = loss_bin
+
+ out_result = result.clamp(min=self.min, max=self.max)
+
+ return loss, out_result
+
+
+class FocalLoss(nn.Module):
+ # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(FocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ # p_t = torch.exp(-loss)
+ # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
+
+ # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = (1.0 - p_t) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class QFocalLoss(nn.Module):
+ # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(QFocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = torch.abs(true - pred_prob) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+class RankSort(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, delta_RS=0.50, eps=1e-10):
+
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets > 0.)
+ fg_logits = logits[fg_labels]
+ fg_targets = targets[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta_RS
+ relevant_bg_labels=((targets==0) & (logits>=threshold_logit))
+
+ relevant_bg_logits = logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ sorting_error=torch.zeros(fg_num).cuda()
+ ranking_error=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ # Difference Transforms (x_ij)
+ fg_relations=fg_logits-fg_logits[ii]
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+
+ if delta_RS > 0:
+ fg_relations=torch.clamp(fg_relations/(2*delta_RS)+0.5,min=0,max=1)
+ bg_relations=torch.clamp(bg_relations/(2*delta_RS)+0.5,min=0,max=1)
+ else:
+ fg_relations = (fg_relations >= 0).float()
+ bg_relations = (bg_relations >= 0).float()
+
+ # Rank of ii among pos and false positive number (bg with larger scores)
+ rank_pos=torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+
+ # Rank of ii among all examples
+ rank=rank_pos+FP_num
+
+ # Ranking error of example ii. target_ranking_error is always 0. (Eq. 7)
+ ranking_error[ii]=FP_num/rank
+
+ # Current sorting error of example ii. (Eq. 7)
+ current_sorting_error = torch.sum(fg_relations*(1-fg_targets))/rank_pos
+
+ #Find examples in the target sorted order for example ii
+ iou_relations = (fg_targets >= fg_targets[ii])
+ target_sorted_order = iou_relations * fg_relations
+
+ #The rank of ii among positives in sorted order
+ rank_pos_target = torch.sum(target_sorted_order)
+
+ #Compute target sorting error. (Eq. 8)
+ #Since target ranking error is 0, this is also total target error
+ target_sorting_error= torch.sum(target_sorted_order*(1-fg_targets))/rank_pos_target
+
+ #Compute sorting error on example ii
+ sorting_error[ii] = current_sorting_error - target_sorting_error
+
+ #Identity Update for Ranking Error
+ if FP_num > eps:
+ #For ii the update is the ranking error
+ fg_grad[ii] -= ranking_error[ii]
+ #For negatives, distribute error via ranking pmf (i.e. bg_relations/FP_num)
+ relevant_bg_grad += (bg_relations*(ranking_error[ii]/FP_num))
+
+ #Find the positives that are misranked (the cause of the error)
+ #These are the ones with smaller IoU but larger logits
+ missorted_examples = (~ iou_relations) * fg_relations
+
+ #Denominotor of sorting pmf
+ sorting_pmf_denom = torch.sum(missorted_examples)
+
+ #Identity Update for Sorting Error
+ if sorting_pmf_denom > eps:
+ #For ii the update is the sorting error
+ fg_grad[ii] -= sorting_error[ii]
+ #For positives, distribute error via sorting pmf (i.e. missorted_examples/sorting_pmf_denom)
+ fg_grad += (missorted_examples*(sorting_error[ii]/sorting_pmf_denom))
+
+ #Normalize gradients by number of positives
+ classification_grads[fg_labels]= (fg_grad/fg_num)
+ classification_grads[relevant_bg_labels]= (relevant_bg_grad/fg_num)
+
+ ctx.save_for_backward(classification_grads)
+
+ return ranking_error.mean(), sorting_error.mean()
+
+ @staticmethod
+ def backward(ctx, out_grad1, out_grad2):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None, None
+
+class aLRPLoss(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, regression_losses, delta=1., eps=1e-5):
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets == 1)
+ fg_logits = logits[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta
+
+ #Get valid bg logits
+ relevant_bg_labels=((targets==0)&(logits>=threshold_logit))
+ relevant_bg_logits=logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ rank=torch.zeros(fg_num).cuda()
+ prec=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ max_prec=0
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ #x_ij s as score differences with fgs
+ fg_relations=fg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with fgs
+ fg_relations=torch.clamp(fg_relations/(2*delta)+0.5,min=0,max=1)
+ #Discard i=j in the summation in rank_pos
+ fg_relations[ii]=0
+
+ #x_ij s as score differences with bgs
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with bgs
+ bg_relations=torch.clamp(bg_relations/(2*delta)+0.5,min=0,max=1)
+
+ #Compute the rank of the example within fgs and number of bgs with larger scores
+ rank_pos=1+torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+ #Store the total since it is normalizer also for aLRP Regression error
+ rank[ii]=rank_pos+FP_num
+
+ #Compute precision for this example to compute classification loss
+ prec[ii]=rank_pos/rank[ii]
+ #For stability, set eps to a infinitesmall value (e.g. 1e-6), then compute grads
+ if FP_num > eps:
+ fg_grad[ii] = -(torch.sum(fg_relations*regression_losses)+FP_num)/rank[ii]
+ relevant_bg_grad += (bg_relations*(-fg_grad[ii]/FP_num))
+
+ #aLRP with grad formulation fg gradient
+ classification_grads[fg_labels]= fg_grad
+ #aLRP with grad formulation bg gradient
+ classification_grads[relevant_bg_labels]= relevant_bg_grad
+
+ classification_grads /= (fg_num)
+
+ cls_loss=1-prec.mean()
+ ctx.save_for_backward(classification_grads)
+
+ return cls_loss, rank, order
+
+ @staticmethod
+ def backward(ctx, out_grad1, out_grad2, out_grad3):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None, None, None
+
+
+class APLoss(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, delta=1.):
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets == 1)
+ fg_logits = logits[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta
+
+ #Get valid bg logits
+ relevant_bg_labels=((targets==0)&(logits>=threshold_logit))
+ relevant_bg_logits=logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ rank=torch.zeros(fg_num).cuda()
+ prec=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ max_prec=0
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ #x_ij s as score differences with fgs
+ fg_relations=fg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with fgs
+ fg_relations=torch.clamp(fg_relations/(2*delta)+0.5,min=0,max=1)
+ #Discard i=j in the summation in rank_pos
+ fg_relations[ii]=0
+
+ #x_ij s as score differences with bgs
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with bgs
+ bg_relations=torch.clamp(bg_relations/(2*delta)+0.5,min=0,max=1)
+
+ #Compute the rank of the example within fgs and number of bgs with larger scores
+ rank_pos=1+torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+ #Store the total since it is normalizer also for aLRP Regression error
+ rank[ii]=rank_pos+FP_num
+
+ #Compute precision for this example
+ current_prec=rank_pos/rank[ii]
+
+ #Compute interpolated AP and store gradients for relevant bg examples
+ if (max_prec<=current_prec):
+ max_prec=current_prec
+ relevant_bg_grad += (bg_relations/rank[ii])
+ else:
+ relevant_bg_grad += (bg_relations/rank[ii])*(((1-max_prec)/(1-current_prec)))
+
+ #Store fg gradients
+ fg_grad[ii]=-(1-max_prec)
+ prec[ii]=max_prec
+
+ #aLRP with grad formulation fg gradient
+ classification_grads[fg_labels]= fg_grad
+ #aLRP with grad formulation bg gradient
+ classification_grads[relevant_bg_labels]= relevant_bg_grad
+
+ classification_grads /= fg_num
+
+ cls_loss=1-prec.mean()
+ ctx.save_for_backward(classification_grads)
+
+ return cls_loss
+
+ @staticmethod
+ def backward(ctx, out_grad1):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLoss, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ #self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.1, .05]) # P3-P7
+ #self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.5, 0.4, .1]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), tcls[i]] = self.cp
+ #t[t==self.cp] = iou.detach().clamp(0).type(t.dtype)
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch = [], [], [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+
+ return tcls, tbox, indices, anch
+
+
+class ComputeLossOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p, targets, imgs)
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p]
+
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ #pxy = ps[:, :2].sigmoid() * 3. - 1.
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ #indices, anch = self.find_positive(p, targets)
+ indices, anch = self.find_3_positive(p, targets)
+ #indices, anch = self.find_4_positive(p, targets)
+ #indices, anch = self.find_5_positive(p, targets)
+ #indices, anch = self.find_9_positive(p, targets)
+ device = torch.device(targets.device)
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append((torch.ones(size=(len(b),)) * i).to(device))
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(10, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost, device=device)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = (matching_matrix.sum(0) > 0.0).to(device)
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+
+class ComputeLossBinOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossBinOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+ #MSEangle = nn.MSELoss().to(device)
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride', 'bin_count':
+ setattr(self, k, getattr(det, k))
+
+ #xy_bin_sigmoid = SigmoidBin(bin_count=11, min=-0.5, max=1.5, use_loss_regression=False).to(device)
+ wh_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0, use_loss_regression=False).to(device)
+ #angle_bin_sigmoid = SigmoidBin(bin_count=31, min=-1.1, max=1.1, use_loss_regression=False).to(device)
+ self.wh_bin_sigmoid = wh_bin_sigmoid
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p, targets, imgs)
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p]
+
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ obj_idx = self.wh_bin_sigmoid.get_length()*2 + 2 # x,y, w-bce, h-bce # xy_bin_sigmoid.get_length()*2
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+
+ #pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ ##pxy = ps[:, :2].sigmoid() * 3. - 1.
+ #pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ #pbox = torch.cat((pxy, pwh), 1) # predicted box
+
+ #x_loss, px = xy_bin_sigmoid.training_loss(ps[..., 0:12], tbox[i][..., 0])
+ #y_loss, py = xy_bin_sigmoid.training_loss(ps[..., 12:24], tbox[i][..., 1])
+ w_loss, pw = self.wh_bin_sigmoid.training_loss(ps[..., 2:(3+self.bin_count)], selected_tbox[..., 2] / anchors[i][..., 0])
+ h_loss, ph = self.wh_bin_sigmoid.training_loss(ps[..., (3+self.bin_count):obj_idx], selected_tbox[..., 3] / anchors[i][..., 1])
+
+ pw *= anchors[i][..., 0]
+ ph *= anchors[i][..., 1]
+
+ px = ps[:, 0].sigmoid() * 2. - 0.5
+ py = ps[:, 1].sigmoid() * 2. - 0.5
+
+ lbox += w_loss + h_loss # + x_loss + y_loss
+
+ #print(f"\n px = {px.shape}, py = {py.shape}, pw = {pw.shape}, ph = {ph.shape} \n")
+
+ pbox = torch.cat((px.unsqueeze(1), py.unsqueeze(1), pw.unsqueeze(1), ph.unsqueeze(1)), 1).to(device) # predicted box
+
+
+
+
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, (1+obj_idx):], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, (1+obj_idx):], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., obj_idx], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ #indices, anch = self.find_positive(p, targets)
+ indices, anch = self.find_3_positive(p, targets)
+ #indices, anch = self.find_4_positive(p, targets)
+ #indices, anch = self.find_5_positive(p, targets)
+ #indices, anch = self.find_9_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ obj_idx = self.wh_bin_sigmoid.get_length()*2 + 2
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, obj_idx:(obj_idx+1)])
+ p_cls.append(fg_pred[:, (obj_idx+1):])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pw = self.wh_bin_sigmoid.forward(fg_pred[..., 2:(3+self.bin_count)].sigmoid()) * anch[i][idx][:, 0] * self.stride[i]
+ ph = self.wh_bin_sigmoid.forward(fg_pred[..., (3+self.bin_count):obj_idx].sigmoid()) * anch[i][idx][:, 1] * self.stride[i]
+
+ pxywh = torch.cat([pxy, pw.unsqueeze(1), ph.unsqueeze(1)], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(10, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+
+class ComputeLossAuxOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossAuxOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs_aux, as_aux_, gjs_aux, gis_aux, targets_aux, anchors_aux = self.build_targets2(p[:self.nl], targets, imgs)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p[:self.nl], targets, imgs)
+ pre_gen_gains_aux = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p[:self.nl]]
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p[:self.nl]]
+
+
+ # Losses
+ for i in range(self.nl): # layer index, layer predictions
+ pi = p[i]
+ pi_aux = p[i+self.nl]
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ b_aux, a_aux, gj_aux, gi_aux = bs_aux[i], as_aux_[i], gjs_aux[i], gis_aux[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+ tobj_aux = torch.zeros_like(pi_aux[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ n_aux = b_aux.shape[0] # number of targets
+ if n_aux:
+ ps_aux = pi_aux[b_aux, a_aux, gj_aux, gi_aux] # prediction subset corresponding to targets
+ grid_aux = torch.stack([gi_aux, gj_aux], dim=1)
+ pxy_aux = ps_aux[:, :2].sigmoid() * 2. - 0.5
+ #pxy_aux = ps_aux[:, :2].sigmoid() * 3. - 1.
+ pwh_aux = (ps_aux[:, 2:4].sigmoid() * 2) ** 2 * anchors_aux[i]
+ pbox_aux = torch.cat((pxy_aux, pwh_aux), 1) # predicted box
+ selected_tbox_aux = targets_aux[i][:, 2:6] * pre_gen_gains_aux[i]
+ selected_tbox_aux[:, :2] -= grid_aux
+ iou_aux = bbox_iou(pbox_aux.T, selected_tbox_aux, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += 0.25 * (1.0 - iou_aux).mean() # iou loss
+
+ # Objectness
+ tobj_aux[b_aux, a_aux, gj_aux, gi_aux] = (1.0 - self.gr) + self.gr * iou_aux.detach().clamp(0).type(tobj_aux.dtype) # iou ratio
+
+ # Classification
+ selected_tcls_aux = targets_aux[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t_aux = torch.full_like(ps_aux[:, 5:], self.cn, device=device) # targets
+ t_aux[range(n_aux), selected_tcls_aux] = self.cp
+ lcls += 0.25 * self.BCEcls(ps_aux[:, 5:], t_aux) # BCE
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ obji_aux = self.BCEobj(pi_aux[..., 4], tobj_aux)
+ lobj += obji * self.balance[i] + 0.25 * obji_aux * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ indices, anch = self.find_3_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(20, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def build_targets2(self, p, targets, imgs):
+
+ indices, anch = self.find_5_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(20, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_5_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 1.0 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
diff --git a/ipex/utils/metrics.py b/ipex/utils/metrics.py
new file mode 100644
index 000000000..6d2f53647
--- /dev/null
+++ b/ipex/utils/metrics.py
@@ -0,0 +1,227 @@
+# Model validation metrics
+
+from pathlib import Path
+
+import matplotlib.pyplot as plt
+import numpy as np
+import torch
+
+from . import general
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
+ return (x[:, :4] * w).sum(1)
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, v5_metric=False, plot=False, save_dir='.', names=()):
+ """ Compute the average precision, given the recall and precision curves.
+ Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
+ # Arguments
+ tp: True positives (nparray, nx1 or nx10).
+ conf: Objectness value from 0-1 (nparray).
+ pred_cls: Predicted object classes (nparray).
+ target_cls: True object classes (nparray).
+ plot: Plot precision-recall curve at mAP@0.5
+ save_dir: Plot save directory
+ # Returns
+ The average precision as computed in py-faster-rcnn.
+ """
+
+ # Sort by objectness
+ i = np.argsort(-conf)
+ tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
+
+ # Find unique classes
+ unique_classes = np.unique(target_cls)
+ nc = unique_classes.shape[0] # number of classes, number of detections
+
+ # Create Precision-Recall curve and compute AP for each class
+ px, py = np.linspace(0, 1, 1000), [] # for plotting
+ ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
+ for ci, c in enumerate(unique_classes):
+ i = pred_cls == c
+ n_l = (target_cls == c).sum() # number of labels
+ n_p = i.sum() # number of predictions
+
+ if n_p == 0 or n_l == 0:
+ continue
+ else:
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + 1e-16) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j], v5_metric=v5_metric)
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+
+ # Compute F1 (harmonic mean of precision and recall)
+ f1 = 2 * p * r / (p + r + 1e-16)
+ if plot:
+ plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
+
+ i = f1.mean(0).argmax() # max F1 index
+ return p[:, i], r[:, i], ap, f1[:, i], unique_classes.astype('int32')
+
+
+def compute_ap(recall, precision, v5_metric=False):
+ """ Compute the average precision, given the recall and precision curves
+ # Arguments
+ recall: The recall curve (list)
+ precision: The precision curve (list)
+ v5_metric: Assume maximum recall to be 1.0, as in YOLOv5, MMDetetion etc.
+ # Returns
+ Average precision, precision curve, recall curve
+ """
+
+ # Append sentinel values to beginning and end
+ if v5_metric: # New YOLOv5 metric, same as MMDetection and Detectron2 repositories
+ mrec = np.concatenate(([0.], recall, [1.0]))
+ else: # Old YOLOv5 metric, i.e. default YOLOv7 metric
+ mrec = np.concatenate(([0.], recall, [recall[-1] + 0.01]))
+ mpre = np.concatenate(([1.], precision, [0.]))
+
+ # Compute the precision envelope
+ mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
+
+ # Integrate area under curve
+ method = 'interp' # methods: 'continuous', 'interp'
+ if method == 'interp':
+ x = np.linspace(0, 1, 101) # 101-point interp (COCO)
+ ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
+ else: # 'continuous'
+ i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
+ ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
+
+ return ap, mpre, mrec
+
+
+class ConfusionMatrix:
+ # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
+ def __init__(self, nc, conf=0.25, iou_thres=0.45):
+ self.matrix = np.zeros((nc + 1, nc + 1))
+ self.nc = nc # number of classes
+ self.conf = conf
+ self.iou_thres = iou_thres
+
+ def process_batch(self, detections, labels):
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ None, updates confusion matrix accordingly
+ """
+ detections = detections[detections[:, 4] > self.conf]
+ gt_classes = labels[:, 0].int()
+ detection_classes = detections[:, 5].int()
+ iou = general.box_iou(labels[:, 1:], detections[:, :4])
+
+ x = torch.where(iou > self.iou_thres)
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ else:
+ matches = np.zeros((0, 3))
+
+ n = matches.shape[0] > 0
+ m0, m1, _ = matches.transpose().astype(np.int16)
+ for i, gc in enumerate(gt_classes):
+ j = m0 == i
+ if n and sum(j) == 1:
+ self.matrix[gc, detection_classes[m1[j]]] += 1 # correct
+ else:
+ self.matrix[self.nc, gc] += 1 # background FP
+
+ if n:
+ for i, dc in enumerate(detection_classes):
+ if not any(m1 == i):
+ self.matrix[dc, self.nc] += 1 # background FN
+
+ def matrix(self):
+ return self.matrix
+
+ def plot(self, save_dir='', names=()):
+ try:
+ import seaborn as sn
+
+ array = self.matrix / (self.matrix.sum(0).reshape(1, self.nc + 1) + 1E-6) # normalize
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig = plt.figure(figsize=(12, 9), tight_layout=True)
+ sn.set(font_scale=1.0 if self.nc < 50 else 0.8) # for label size
+ labels = (0 < len(names) < 99) and len(names) == self.nc # apply names to ticklabels
+ sn.heatmap(array, annot=self.nc < 30, annot_kws={"size": 8}, cmap='Blues', fmt='.2f', square=True,
+ xticklabels=names + ['background FP'] if labels else "auto",
+ yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
+ fig.axes[0].set_xlabel('True')
+ fig.axes[0].set_ylabel('Predicted')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ except Exception as e:
+ pass
+
+ def print(self):
+ for i in range(self.nc + 1):
+ print(' '.join(map(str, self.matrix[i])))
+
+
+# Plots ----------------------------------------------------------------------------------------------------------------
+
+def plot_pr_curve(px, py, ap, save_dir='pr_curve.png', names=()):
+ # Precision-recall curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+ py = np.stack(py, axis=1)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py.T):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)
+ else:
+ ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)
+
+ ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())
+ ax.set_xlabel('Recall')
+ ax.set_ylabel('Precision')
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
+
+
+def plot_mc_curve(px, py, save_dir='mc_curve.png', names=(), xlabel='Confidence', ylabel='Metric'):
+ # Metric-confidence curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)
+ else:
+ ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
+
+ y = py.mean(0)
+ ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
+ ax.set_xlabel(xlabel)
+ ax.set_ylabel(ylabel)
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
diff --git a/ipex/utils/plots.py b/ipex/utils/plots.py
new file mode 100644
index 000000000..fdd8d0e85
--- /dev/null
+++ b/ipex/utils/plots.py
@@ -0,0 +1,489 @@
+# Plotting utils
+
+import glob
+import math
+import os
+import random
+from copy import copy
+from pathlib import Path
+
+import cv2
+import matplotlib
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import seaborn as sns
+import torch
+import yaml
+from PIL import Image, ImageDraw, ImageFont
+from scipy.signal import butter, filtfilt
+
+from utils.general import xywh2xyxy, xyxy2xywh
+from utils.metrics import fitness
+
+# Settings
+matplotlib.rc('font', **{'size': 11})
+matplotlib.use('Agg') # for writing to files only
+
+
+def color_list():
+ # Return first 10 plt colors as (r,g,b) https://stackoverflow.com/questions/51350872/python-from-color-name-to-rgb
+ def hex2rgb(h):
+ return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))
+
+ return [hex2rgb(h) for h in matplotlib.colors.TABLEAU_COLORS.values()] # or BASE_ (8), CSS4_ (148), XKCD_ (949)
+
+
+def hist2d(x, y, n=100):
+ # 2d histogram used in labels.png and evolve.png
+ xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
+ hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
+ xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
+ yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
+ return np.log(hist[xidx, yidx])
+
+
+def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
+ # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
+ def butter_lowpass(cutoff, fs, order):
+ nyq = 0.5 * fs
+ normal_cutoff = cutoff / nyq
+ return butter(order, normal_cutoff, btype='low', analog=False)
+
+ b, a = butter_lowpass(cutoff, fs, order=order)
+ return filtfilt(b, a, data) # forward-backward filter
+
+
+def plot_one_box(x, img, color=None, label=None, line_thickness=3):
+ # Plots one bounding box on image img
+ tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
+ color = color or [random.randint(0, 255) for _ in range(3)]
+ c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
+ cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
+ if label:
+ tf = max(tl - 1, 1) # font thickness
+ t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
+ c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
+ cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
+ cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
+
+
+def plot_one_box_PIL(box, img, color=None, label=None, line_thickness=None):
+ img = Image.fromarray(img)
+ draw = ImageDraw.Draw(img)
+ line_thickness = line_thickness or max(int(min(img.size) / 200), 2)
+ draw.rectangle(box, width=line_thickness, outline=tuple(color)) # plot
+ if label:
+ fontsize = max(round(max(img.size) / 40), 12)
+ font = ImageFont.truetype("Arial.ttf", fontsize)
+ txt_width, txt_height = font.getsize(label)
+ draw.rectangle([box[0], box[1] - txt_height + 4, box[0] + txt_width, box[1]], fill=tuple(color))
+ draw.text((box[0], box[1] - txt_height + 1), label, fill=(255, 255, 255), font=font)
+ return np.asarray(img)
+
+
+def plot_wh_methods(): # from utils.plots import *; plot_wh_methods()
+ # Compares the two methods for width-height anchor multiplication
+ # https://github.com/ultralytics/yolov3/issues/168
+ x = np.arange(-4.0, 4.0, .1)
+ ya = np.exp(x)
+ yb = torch.sigmoid(torch.from_numpy(x)).numpy() * 2
+
+ fig = plt.figure(figsize=(6, 3), tight_layout=True)
+ plt.plot(x, ya, '.-', label='YOLOv3')
+ plt.plot(x, yb ** 2, '.-', label='YOLOR ^2')
+ plt.plot(x, yb ** 1.6, '.-', label='YOLOR ^1.6')
+ plt.xlim(left=-4, right=4)
+ plt.ylim(bottom=0, top=6)
+ plt.xlabel('input')
+ plt.ylabel('output')
+ plt.grid()
+ plt.legend()
+ fig.savefig('comparison.png', dpi=200)
+
+
+def output_to_target(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ for *box, conf, cls in o.cpu().numpy():
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])
+ return np.array(targets)
+
+
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=640, max_subplots=16):
+ # Plot image grid with labels
+
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+
+ # un-normalise
+ if np.max(images[0]) <= 1:
+ images *= 255
+
+ tl = 3 # line thickness
+ tf = max(tl - 1, 1) # font thickness
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+
+ # Check if we should resize
+ scale_factor = max_size / max(h, w)
+ if scale_factor < 1:
+ h = math.ceil(scale_factor * h)
+ w = math.ceil(scale_factor * w)
+
+ colors = color_list() # list of colors
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, img in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+
+ block_x = int(w * (i // ns))
+ block_y = int(h * (i % ns))
+
+ img = img.transpose(1, 2, 0)
+ if scale_factor < 1:
+ img = cv2.resize(img, (w, h))
+
+ mosaic[block_y:block_y + h, block_x:block_x + w, :] = img
+ if len(targets) > 0:
+ image_targets = targets[targets[:, 0] == i]
+ boxes = xywh2xyxy(image_targets[:, 2:6]).T
+ classes = image_targets[:, 1].astype('int')
+ labels = image_targets.shape[1] == 6 # labels if no conf column
+ conf = None if labels else image_targets[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale_factor < 1: # absolute coords need scale if image scales
+ boxes *= scale_factor
+ boxes[[0, 2]] += block_x
+ boxes[[1, 3]] += block_y
+ for j, box in enumerate(boxes.T):
+ cls = int(classes[j])
+ color = colors[cls % len(colors)]
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = '%s' % cls if labels else '%s %.1f' % (cls, conf[j])
+ plot_one_box(box, mosaic, label=label, color=color, line_thickness=tl)
+
+ # Draw image filename labels
+ if paths:
+ label = Path(paths[i]).name[:40] # trim to 40 char
+ t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
+ cv2.putText(mosaic, label, (block_x + 5, block_y + t_size[1] + 5), 0, tl / 3, [220, 220, 220], thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ # Image border
+ cv2.rectangle(mosaic, (block_x, block_y), (block_x + w, block_y + h), (255, 255, 255), thickness=3)
+
+ if fname:
+ r = min(1280. / max(h, w) / ns, 1.0) # ratio to limit image size
+ mosaic = cv2.resize(mosaic, (int(ns * w * r), int(ns * h * r)), interpolation=cv2.INTER_AREA)
+ # cv2.imwrite(fname, cv2.cvtColor(mosaic, cv2.COLOR_BGR2RGB)) # cv2 save
+ Image.fromarray(mosaic).save(fname) # PIL save
+ return mosaic
+
+
+def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):
+ # Plot LR simulating training for full epochs
+ optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
+ y = []
+ for _ in range(epochs):
+ scheduler.step()
+ y.append(optimizer.param_groups[0]['lr'])
+ plt.plot(y, '.-', label='LR')
+ plt.xlabel('epoch')
+ plt.ylabel('LR')
+ plt.grid()
+ plt.xlim(0, epochs)
+ plt.ylim(0)
+ plt.savefig(Path(save_dir) / 'LR.png', dpi=200)
+ plt.close()
+
+
+def plot_test_txt(): # from utils.plots import *; plot_test()
+ # Plot test.txt histograms
+ x = np.loadtxt('test.txt', dtype=np.float32)
+ box = xyxy2xywh(x[:, :4])
+ cx, cy = box[:, 0], box[:, 1]
+
+ fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
+ ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
+ ax.set_aspect('equal')
+ plt.savefig('hist2d.png', dpi=300)
+
+ fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
+ ax[0].hist(cx, bins=600)
+ ax[1].hist(cy, bins=600)
+ plt.savefig('hist1d.png', dpi=200)
+
+
+def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
+ # Plot targets.txt histograms
+ x = np.loadtxt('targets.txt', dtype=np.float32).T
+ s = ['x targets', 'y targets', 'width targets', 'height targets']
+ fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(4):
+ ax[i].hist(x[i], bins=100, label='%.3g +/- %.3g' % (x[i].mean(), x[i].std()))
+ ax[i].legend()
+ ax[i].set_title(s[i])
+ plt.savefig('targets.jpg', dpi=200)
+
+
+def plot_study_txt(path='', x=None): # from utils.plots import *; plot_study_txt()
+ # Plot study.txt generated by test.py
+ fig, ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)
+ # ax = ax.ravel()
+
+ fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
+ # for f in [Path(path) / f'study_coco_{x}.txt' for x in ['yolor-p6', 'yolor-w6', 'yolor-e6', 'yolor-d6']]:
+ for f in sorted(Path(path).glob('study*.txt')):
+ y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
+ x = np.arange(y.shape[1]) if x is None else np.array(x)
+ s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_inference (ms/img)', 't_NMS (ms/img)', 't_total (ms/img)']
+ # for i in range(7):
+ # ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)
+ # ax[i].set_title(s[i])
+
+ j = y[3].argmax() + 1
+ ax2.plot(y[6, 1:j], y[3, 1:j] * 1E2, '.-', linewidth=2, markersize=8,
+ label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
+
+ ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
+ 'k.-', linewidth=2, markersize=8, alpha=.25, label='EfficientDet')
+
+ ax2.grid(alpha=0.2)
+ ax2.set_yticks(np.arange(20, 60, 5))
+ ax2.set_xlim(0, 57)
+ ax2.set_ylim(30, 55)
+ ax2.set_xlabel('GPU Speed (ms/img)')
+ ax2.set_ylabel('COCO AP val')
+ ax2.legend(loc='lower right')
+ plt.savefig(str(Path(path).name) + '.png', dpi=300)
+
+
+def plot_labels(labels, names=(), save_dir=Path(''), loggers=None):
+ # plot dataset labels
+ print('Plotting labels... ')
+ c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
+ nc = int(c.max() + 1) # number of classes
+ colors = color_list()
+ x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])
+
+ # seaborn correlogram
+ sns.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
+ plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)
+ plt.close()
+
+ # matplotlib labels
+ matplotlib.use('svg') # faster
+ ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
+ ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
+ ax[0].set_ylabel('instances')
+ if 0 < len(names) < 30:
+ ax[0].set_xticks(range(len(names)))
+ ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ else:
+ ax[0].set_xlabel('classes')
+ sns.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
+ sns.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)
+
+ # rectangles
+ labels[:, 1:3] = 0.5 # center
+ labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
+ img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
+ for cls, *box in labels[:1000]:
+ ImageDraw.Draw(img).rectangle(box, width=1, outline=colors[int(cls) % 10]) # plot
+ ax[1].imshow(img)
+ ax[1].axis('off')
+
+ for a in [0, 1, 2, 3]:
+ for s in ['top', 'right', 'left', 'bottom']:
+ ax[a].spines[s].set_visible(False)
+
+ plt.savefig(save_dir / 'labels.jpg', dpi=200)
+ matplotlib.use('Agg')
+ plt.close()
+
+ # loggers
+ for k, v in loggers.items() or {}:
+ if k == 'wandb' and v:
+ v.log({"Labels": [v.Image(str(x), caption=x.name) for x in save_dir.glob('*labels*.jpg')]}, commit=False)
+
+
+def plot_evolution(yaml_file='data/hyp.finetune.yaml'): # from utils.plots import *; plot_evolution()
+ # Plot hyperparameter evolution results in evolve.txt
+ with open(yaml_file) as f:
+ hyp = yaml.load(f, Loader=yaml.SafeLoader)
+ x = np.loadtxt('evolve.txt', ndmin=2)
+ f = fitness(x)
+ # weights = (f - f.min()) ** 2 # for weighted results
+ plt.figure(figsize=(10, 12), tight_layout=True)
+ matplotlib.rc('font', **{'size': 8})
+ for i, (k, v) in enumerate(hyp.items()):
+ y = x[:, i + 7]
+ # mu = (y * weights).sum() / weights.sum() # best weighted result
+ mu = y[f.argmax()] # best single result
+ plt.subplot(6, 5, i + 1)
+ plt.scatter(y, f, c=hist2d(y, f, 20), cmap='viridis', alpha=.8, edgecolors='none')
+ plt.plot(mu, f.max(), 'k+', markersize=15)
+ plt.title('%s = %.3g' % (k, mu), fontdict={'size': 9}) # limit to 40 characters
+ if i % 5 != 0:
+ plt.yticks([])
+ print('%15s: %.3g' % (k, mu))
+ plt.savefig('evolve.png', dpi=200)
+ print('\nPlot saved as evolve.png')
+
+
+def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
+ # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()
+ ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
+ s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']
+ files = list(Path(save_dir).glob('frames*.txt'))
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
+ n = results.shape[1] # number of rows
+ x = np.arange(start, min(stop, n) if stop else n)
+ results = results[:, x]
+ t = (results[0] - results[0].min()) # set t0=0s
+ results[0] = x
+ for i, a in enumerate(ax):
+ if i < len(results):
+ label = labels[fi] if len(labels) else f.stem.replace('frames_', '')
+ a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)
+ a.set_title(s[i])
+ a.set_xlabel('time (s)')
+ # if fi == len(files) - 1:
+ # a.set_ylim(bottom=0)
+ for side in ['top', 'right']:
+ a.spines[side].set_visible(False)
+ else:
+ a.remove()
+ except Exception as e:
+ print('Warning: Plotting error for %s; %s' % (f, e))
+
+ ax[1].legend()
+ plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
+
+
+def plot_results_overlay(start=0, stop=0): # from utils.plots import *; plot_results_overlay()
+ # Plot training 'results*.txt', overlaying train and val losses
+ s = ['train', 'train', 'train', 'Precision', 'mAP@0.5', 'val', 'val', 'val', 'Recall', 'mAP@0.5:0.95'] # legends
+ t = ['Box', 'Objectness', 'Classification', 'P-R', 'mAP-F1'] # titles
+ for f in sorted(glob.glob('results*.txt') + glob.glob('../../Downloads/results*.txt')):
+ results = np.loadtxt(f, usecols=[2, 3, 4, 8, 9, 12, 13, 14, 10, 11], ndmin=2).T
+ n = results.shape[1] # number of rows
+ x = range(start, min(stop, n) if stop else n)
+ fig, ax = plt.subplots(1, 5, figsize=(14, 3.5), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(5):
+ for j in [i, i + 5]:
+ y = results[j, x]
+ ax[i].plot(x, y, marker='.', label=s[j])
+ # y_smooth = butter_lowpass_filtfilt(y)
+ # ax[i].plot(x, np.gradient(y_smooth), marker='.', label=s[j])
+
+ ax[i].set_title(t[i])
+ ax[i].legend()
+ ax[i].set_ylabel(f) if i == 0 else None # add filename
+ fig.savefig(f.replace('.txt', '.png'), dpi=200)
+
+
+def plot_results(start=0, stop=0, bucket='', id=(), labels=(), save_dir=''):
+ # Plot training 'results*.txt'. from utils.plots import *; plot_results(save_dir='runs/train/exp')
+ fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
+ ax = ax.ravel()
+ s = ['Box', 'Objectness', 'Classification', 'Precision', 'Recall',
+ 'val Box', 'val Objectness', 'val Classification', 'mAP@0.5', 'mAP@0.5:0.95']
+ if bucket:
+ # files = ['https://storage.googleapis.com/%s/results%g.txt' % (bucket, x) for x in id]
+ files = ['results%g.txt' % x for x in id]
+ c = ('gsutil cp ' + '%s ' * len(files) + '.') % tuple('gs://%s/results%g.txt' % (bucket, x) for x in id)
+ os.system(c)
+ else:
+ files = list(Path(save_dir).glob('results*.txt'))
+ assert len(files), 'No results.txt files found in %s, nothing to plot.' % os.path.abspath(save_dir)
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, usecols=[2, 3, 4, 8, 9, 12, 13, 14, 10, 11], ndmin=2).T
+ n = results.shape[1] # number of rows
+ x = range(start, min(stop, n) if stop else n)
+ for i in range(10):
+ y = results[i, x]
+ if i in [0, 1, 2, 5, 6, 7]:
+ y[y == 0] = np.nan # don't show zero loss values
+ # y /= y[0] # normalize
+ label = labels[fi] if len(labels) else f.stem
+ ax[i].plot(x, y, marker='.', label=label, linewidth=2, markersize=8)
+ ax[i].set_title(s[i])
+ # if i in [5, 6, 7]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print('Warning: Plotting error for %s; %s' % (f, e))
+
+ ax[1].legend()
+ fig.savefig(Path(save_dir) / 'results.png', dpi=200)
+
+
+def output_to_keypoint(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ kpts = o[:,6:]
+ o = o[:,:6]
+ for index, (*box, conf, cls) in enumerate(o.detach().cpu().numpy()):
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf, *list(kpts.detach().cpu().numpy()[index])])
+ return np.array(targets)
+
+
+def plot_skeleton_kpts(im, kpts, steps, orig_shape=None):
+ #Plot the skeleton and keypointsfor coco datatset
+ palette = np.array([[255, 128, 0], [255, 153, 51], [255, 178, 102],
+ [230, 230, 0], [255, 153, 255], [153, 204, 255],
+ [255, 102, 255], [255, 51, 255], [102, 178, 255],
+ [51, 153, 255], [255, 153, 153], [255, 102, 102],
+ [255, 51, 51], [153, 255, 153], [102, 255, 102],
+ [51, 255, 51], [0, 255, 0], [0, 0, 255], [255, 0, 0],
+ [255, 255, 255]])
+
+ skeleton = [[16, 14], [14, 12], [17, 15], [15, 13], [12, 13], [6, 12],
+ [7, 13], [6, 7], [6, 8], [7, 9], [8, 10], [9, 11], [2, 3],
+ [1, 2], [1, 3], [2, 4], [3, 5], [4, 6], [5, 7]]
+
+ pose_limb_color = palette[[9, 9, 9, 9, 7, 7, 7, 0, 0, 0, 0, 0, 16, 16, 16, 16, 16, 16, 16]]
+ pose_kpt_color = palette[[16, 16, 16, 16, 16, 0, 0, 0, 0, 0, 0, 9, 9, 9, 9, 9, 9]]
+ radius = 5
+ num_kpts = len(kpts) // steps
+
+ for kid in range(num_kpts):
+ r, g, b = pose_kpt_color[kid]
+ x_coord, y_coord = kpts[steps * kid], kpts[steps * kid + 1]
+ if not (x_coord % 640 == 0 or y_coord % 640 == 0):
+ if steps == 3:
+ conf = kpts[steps * kid + 2]
+ if conf < 0.5:
+ continue
+ cv2.circle(im, (int(x_coord), int(y_coord)), radius, (int(r), int(g), int(b)), -1)
+
+ for sk_id, sk in enumerate(skeleton):
+ r, g, b = pose_limb_color[sk_id]
+ pos1 = (int(kpts[(sk[0]-1)*steps]), int(kpts[(sk[0]-1)*steps+1]))
+ pos2 = (int(kpts[(sk[1]-1)*steps]), int(kpts[(sk[1]-1)*steps+1]))
+ if steps == 3:
+ conf1 = kpts[(sk[0]-1)*steps+2]
+ conf2 = kpts[(sk[1]-1)*steps+2]
+ if conf1<0.5 or conf2<0.5:
+ continue
+ if pos1[0]%640 == 0 or pos1[1]%640==0 or pos1[0]<0 or pos1[1]<0:
+ continue
+ if pos2[0] % 640 == 0 or pos2[1] % 640 == 0 or pos2[0]<0 or pos2[1]<0:
+ continue
+ cv2.line(im, pos1, pos2, (int(r), int(g), int(b)), thickness=2)
diff --git a/ipex/utils/torch_utils.py b/ipex/utils/torch_utils.py
new file mode 100644
index 000000000..1e631b555
--- /dev/null
+++ b/ipex/utils/torch_utils.py
@@ -0,0 +1,374 @@
+# YOLOR PyTorch utils
+
+import datetime
+import logging
+import math
+import os
+import platform
+import subprocess
+import time
+from contextlib import contextmanager
+from copy import deepcopy
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+import torch.nn as nn
+import torch.nn.functional as F
+import torchvision
+
+try:
+ import thop # for FLOPS computation
+except ImportError:
+ thop = None
+logger = logging.getLogger(__name__)
+
+
+@contextmanager
+def torch_distributed_zero_first(local_rank: int):
+ """
+ Decorator to make all processes in distributed training wait for each local_master to do something.
+ """
+ if local_rank not in [-1, 0]:
+ torch.distributed.barrier()
+ yield
+ if local_rank == 0:
+ torch.distributed.barrier()
+
+
+def init_torch_seeds(seed=0):
+ # Speed-reproducibility tradeoff https://pytorch.org/docs/stable/notes/randomness.html
+ torch.manual_seed(seed)
+ if seed == 0: # slower, more reproducible
+ cudnn.benchmark, cudnn.deterministic = False, True
+ else: # faster, less reproducible
+ cudnn.benchmark, cudnn.deterministic = True, False
+
+
+def date_modified(path=__file__):
+ # return human-readable file modification date, i.e. '2021-3-26'
+ t = datetime.datetime.fromtimestamp(Path(path).stat().st_mtime)
+ return f'{t.year}-{t.month}-{t.day}'
+
+
+def git_describe(path=Path(__file__).parent): # path must be a directory
+ # return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
+ s = f'git -C {path} describe --tags --long --always'
+ try:
+ return subprocess.check_output(s, shell=True, stderr=subprocess.STDOUT).decode()[:-1]
+ except subprocess.CalledProcessError as e:
+ return '' # not a git repository
+
+
+def select_device(device='', batch_size=None):
+ # device = 'cpu' or '0' or '0,1,2,3'
+ s = f'YOLOR 🚀 {git_describe() or date_modified()} torch {torch.__version__} ' # string
+ cpu = device.lower() == 'cpu'
+ if cpu:
+ os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
+ elif device: # non-cpu device requested
+ os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable
+ assert torch.cuda.is_available(), f'CUDA unavailable, invalid device {device} requested' # check availability
+
+ cuda = not cpu and torch.cuda.is_available()
+ if cuda:
+ n = torch.cuda.device_count()
+ if n > 1 and batch_size: # check that batch_size is compatible with device_count
+ assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
+ space = ' ' * len(s)
+ for i, d in enumerate(device.split(',') if device else range(n)):
+ p = torch.cuda.get_device_properties(i)
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / 1024 ** 2}MB)\n" # bytes to MB
+ else:
+ s += 'CPU\n'
+
+ logger.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe
+ return torch.device('cuda:0' if cuda else 'cpu')
+
+
+def time_synchronized():
+ # pytorch-accurate time
+ if torch.cuda.is_available():
+ torch.cuda.synchronize()
+ return time.time()
+
+
+def profile(x, ops, n=100, device=None):
+ # profile a pytorch module or list of modules. Example usage:
+ # x = torch.randn(16, 3, 640, 640) # input
+ # m1 = lambda x: x * torch.sigmoid(x)
+ # m2 = nn.SiLU()
+ # profile(x, [m1, m2], n=100) # profile speed over 100 iterations
+
+ device = device or torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
+ x = x.to(device)
+ x.requires_grad = True
+ print(torch.__version__, device.type, torch.cuda.get_device_properties(0) if device.type == 'cuda' else '')
+ print(f"\n{'Params':>12s}{'GFLOPS':>12s}{'forward (ms)':>16s}{'backward (ms)':>16s}{'input':>24s}{'output':>24s}")
+ for m in ops if isinstance(ops, list) else [ops]:
+ m = m.to(device) if hasattr(m, 'to') else m # device
+ m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m # type
+ dtf, dtb, t = 0., 0., [0., 0., 0.] # dt forward, backward
+ try:
+ flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPS
+ except:
+ flops = 0
+
+ for _ in range(n):
+ t[0] = time_synchronized()
+ y = m(x)
+ t[1] = time_synchronized()
+ try:
+ _ = y.sum().backward()
+ t[2] = time_synchronized()
+ except: # no backward method
+ t[2] = float('nan')
+ dtf += (t[1] - t[0]) * 1000 / n # ms per op forward
+ dtb += (t[2] - t[1]) * 1000 / n # ms per op backward
+
+ s_in = tuple(x.shape) if isinstance(x, torch.Tensor) else 'list'
+ s_out = tuple(y.shape) if isinstance(y, torch.Tensor) else 'list'
+ p = sum(list(x.numel() for x in m.parameters())) if isinstance(m, nn.Module) else 0 # parameters
+ print(f'{p:12}{flops:12.4g}{dtf:16.4g}{dtb:16.4g}{str(s_in):>24s}{str(s_out):>24s}')
+
+
+def is_parallel(model):
+ return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
+
+
+def intersect_dicts(da, db, exclude=()):
+ # Dictionary intersection of matching keys and shapes, omitting 'exclude' keys, using da values
+ return {k: v for k, v in da.items() if k in db and not any(x in k for x in exclude) and v.shape == db[k].shape}
+
+
+def initialize_weights(model):
+ for m in model.modules():
+ t = type(m)
+ if t is nn.Conv2d:
+ pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
+ elif t is nn.BatchNorm2d:
+ m.eps = 1e-3
+ m.momentum = 0.03
+ elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6]:
+ m.inplace = True
+
+
+def find_modules(model, mclass=nn.Conv2d):
+ # Finds layer indices matching module class 'mclass'
+ return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
+
+
+def sparsity(model):
+ # Return global model sparsity
+ a, b = 0., 0.
+ for p in model.parameters():
+ a += p.numel()
+ b += (p == 0).sum()
+ return b / a
+
+
+def prune(model, amount=0.3):
+ # Prune model to requested global sparsity
+ import torch.nn.utils.prune as prune
+ print('Pruning model... ', end='')
+ for name, m in model.named_modules():
+ if isinstance(m, nn.Conv2d):
+ prune.l1_unstructured(m, name='weight', amount=amount) # prune
+ prune.remove(m, 'weight') # make permanent
+ print(' %.3g global sparsity' % sparsity(model))
+
+
+def fuse_conv_and_bn(conv, bn):
+ # Fuse convolution and batchnorm layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
+ fusedconv = nn.Conv2d(conv.in_channels,
+ conv.out_channels,
+ kernel_size=conv.kernel_size,
+ stride=conv.stride,
+ padding=conv.padding,
+ groups=conv.groups,
+ bias=True).requires_grad_(False).to(conv.weight.device)
+
+ # prepare filters
+ w_conv = conv.weight.clone().view(conv.out_channels, -1)
+ w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
+ fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
+
+ # prepare spatial bias
+ b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
+ b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
+ fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
+
+ return fusedconv
+
+
+def model_info(model, verbose=False, img_size=640):
+ # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
+ n_p = sum(x.numel() for x in model.parameters()) # number parameters
+ n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
+ if verbose:
+ print('%5s %40s %9s %12s %20s %10s %10s' % ('layer', 'name', 'gradient', 'parameters', 'shape', 'mu', 'sigma'))
+ for i, (name, p) in enumerate(model.named_parameters()):
+ name = name.replace('module_list.', '')
+ print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
+ (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
+
+ try: # FLOPS
+ from thop import profile
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32
+ img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input
+ flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPS
+ img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float
+ fs = ', %.1f GFLOPS' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPS
+ except (ImportError, Exception):
+ fs = ''
+
+ logger.info(f"Model Summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
+
+
+def load_classifier(name='resnet101', n=2):
+ # Loads a pretrained model reshaped to n-class output
+ model = torchvision.models.__dict__[name](pretrained=True)
+
+ # ResNet model properties
+ # input_size = [3, 224, 224]
+ # input_space = 'RGB'
+ # input_range = [0, 1]
+ # mean = [0.485, 0.456, 0.406]
+ # std = [0.229, 0.224, 0.225]
+
+ # Reshape output to n classes
+ filters = model.fc.weight.shape[1]
+ model.fc.bias = nn.Parameter(torch.zeros(n), requires_grad=True)
+ model.fc.weight = nn.Parameter(torch.zeros(n, filters), requires_grad=True)
+ model.fc.out_features = n
+ return model
+
+
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # scales img(bs,3,y,x) by ratio constrained to gs-multiple
+ if ratio == 1.0:
+ return img
+ else:
+ h, w = img.shape[2:]
+ s = (int(h * ratio), int(w * ratio)) # new size
+ img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
+ if not same_shape: # pad/crop img
+ h, w = [math.ceil(x * ratio / gs) * gs for x in (h, w)]
+ return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
+
+
+def copy_attr(a, b, include=(), exclude=()):
+ # Copy attributes from b to a, options to only include [...] and to exclude [...]
+ for k, v in b.__dict__.items():
+ if (len(include) and k not in include) or k.startswith('_') or k in exclude:
+ continue
+ else:
+ setattr(a, k, v)
+
+
+class ModelEMA:
+ """ Model Exponential Moving Average from https://github.com/rwightman/pytorch-image-models
+ Keep a moving average of everything in the model state_dict (parameters and buffers).
+ This is intended to allow functionality like
+ https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
+ A smoothed version of the weights is necessary for some training schemes to perform well.
+ This class is sensitive where it is initialized in the sequence of model init,
+ GPU assignment and distributed training wrappers.
+ """
+
+ def __init__(self, model, decay=0.9999, updates=0):
+ # Create EMA
+ self.ema = deepcopy(model.module if is_parallel(model) else model).eval() # FP32 EMA
+ # if next(model.parameters()).device.type != 'cpu':
+ # self.ema.half() # FP16 EMA
+ self.updates = updates # number of EMA updates
+ self.decay = lambda x: decay * (1 - math.exp(-x / 2000)) # decay exponential ramp (to help early epochs)
+ for p in self.ema.parameters():
+ p.requires_grad_(False)
+
+ def update(self, model):
+ # Update EMA parameters
+ with torch.no_grad():
+ self.updates += 1
+ d = self.decay(self.updates)
+
+ msd = model.module.state_dict() if is_parallel(model) else model.state_dict() # model state_dict
+ for k, v in self.ema.state_dict().items():
+ if v.dtype.is_floating_point:
+ v *= d
+ v += (1. - d) * msd[k].detach()
+
+ def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
+ # Update EMA attributes
+ copy_attr(self.ema, model, include, exclude)
+
+
+class BatchNormXd(torch.nn.modules.batchnorm._BatchNorm):
+ def _check_input_dim(self, input):
+ # The only difference between BatchNorm1d, BatchNorm2d, BatchNorm3d, etc
+ # is this method that is overwritten by the sub-class
+ # This original goal of this method was for tensor sanity checks
+ # If you're ok bypassing those sanity checks (eg. if you trust your inference
+ # to provide the right dimensional inputs), then you can just use this method
+ # for easy conversion from SyncBatchNorm
+ # (unfortunately, SyncBatchNorm does not store the original class - if it did
+ # we could return the one that was originally created)
+ return
+
+def revert_sync_batchnorm(module):
+ # this is very similar to the function that it is trying to revert:
+ # https://github.com/pytorch/pytorch/blob/c8b3686a3e4ba63dc59e5dcfe5db3430df256833/torch/nn/modules/batchnorm.py#L679
+ module_output = module
+ if isinstance(module, torch.nn.modules.batchnorm.SyncBatchNorm):
+ new_cls = BatchNormXd
+ module_output = BatchNormXd(module.num_features,
+ module.eps, module.momentum,
+ module.affine,
+ module.track_running_stats)
+ if module.affine:
+ with torch.no_grad():
+ module_output.weight = module.weight
+ module_output.bias = module.bias
+ module_output.running_mean = module.running_mean
+ module_output.running_var = module.running_var
+ module_output.num_batches_tracked = module.num_batches_tracked
+ if hasattr(module, "qconfig"):
+ module_output.qconfig = module.qconfig
+ for name, child in module.named_children():
+ module_output.add_module(name, revert_sync_batchnorm(child))
+ del module
+ return module_output
+
+
+class TracedModel(nn.Module):
+
+ def __init__(self, model=None, device=None, img_size=(640,640)):
+ super(TracedModel, self).__init__()
+
+ print(" Convert model to Traced-model... ")
+ self.stride = model.stride
+ self.names = model.names
+ self.model = model
+
+ self.model = revert_sync_batchnorm(self.model)
+ self.model.to('cpu')
+ self.model.eval()
+
+ self.detect_layer = self.model.model[-1]
+ self.model.traced = True
+
+ rand_example = torch.rand(1, 3, img_size, img_size)
+
+ traced_script_module = torch.jit.trace(self.model, rand_example, strict=False)
+ #traced_script_module = torch.jit.script(self.model)
+ traced_script_module.save("traced_model.pt")
+ print(" traced_script_module saved! ")
+ self.model = traced_script_module
+ self.model.to(device)
+ self.detect_layer.to(device)
+ print(" model is traced! \n")
+
+ def forward(self, x, augment=False, profile=False):
+ out = self.model(x)
+ out = self.detect_layer(out)
+ return out
\ No newline at end of file
diff --git a/ipex/utils/wandb_logging/__init__.py b/ipex/utils/wandb_logging/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/ipex/utils/wandb_logging/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/ipex/utils/wandb_logging/log_dataset.py b/ipex/utils/wandb_logging/log_dataset.py
new file mode 100644
index 000000000..74cd6c6cd
--- /dev/null
+++ b/ipex/utils/wandb_logging/log_dataset.py
@@ -0,0 +1,24 @@
+import argparse
+
+import yaml
+
+from wandb_utils import WandbLogger
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ with open(opt.data) as f:
+ data = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ logger = WandbLogger(opt, '', None, data, job_type='Dataset Creation')
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOR', help='name of W&B Project')
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/ipex/utils/wandb_logging/wandb_utils.py b/ipex/utils/wandb_logging/wandb_utils.py
new file mode 100644
index 000000000..aec7c5f48
--- /dev/null
+++ b/ipex/utils/wandb_logging/wandb_utils.py
@@ -0,0 +1,306 @@
+import json
+import sys
+from pathlib import Path
+
+import torch
+import yaml
+from tqdm import tqdm
+
+sys.path.append(str(Path(__file__).parent.parent.parent)) # add utils/ to path
+from utils.datasets import LoadImagesAndLabels
+from utils.datasets import img2label_paths
+from utils.general import colorstr, xywh2xyxy, check_dataset
+
+try:
+ import wandb
+ from wandb import init, finish
+except ImportError:
+ wandb = None
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):
+ return from_string[len(prefix):]
+
+
+def check_wandb_config_file(data_config_file):
+ wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path
+ if Path(wandb_config).is_file():
+ return wandb_config
+ return data_config_file
+
+
+def get_run_info(run_path):
+ run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))
+ run_id = run_path.stem
+ project = run_path.parent.stem
+ model_artifact_name = 'run_' + run_id + '_model'
+ return run_id, project, model_artifact_name
+
+
+def check_wandb_resume(opt):
+ process_wandb_config_ddp_mode(opt) if opt.global_rank not in [-1, 0] else None
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ if opt.global_rank not in [-1, 0]: # For resuming DDP runs
+ run_id, project, model_artifact_name = get_run_info(opt.resume)
+ api = wandb.Api()
+ artifact = api.artifact(project + '/' + model_artifact_name + ':latest')
+ modeldir = artifact.download()
+ opt.weights = str(Path(modeldir) / "last.pt")
+ return True
+ return None
+
+
+def process_wandb_config_ddp_mode(opt):
+ with open(opt.data) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ train_dir, val_dir = None, None
+ if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)
+ train_dir = train_artifact.download()
+ train_path = Path(train_dir) / 'data/images/'
+ data_dict['train'] = str(train_path)
+
+ if isinstance(data_dict['val'], str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ val_artifact = api.artifact(remove_prefix(data_dict['val']) + ':' + opt.artifact_alias)
+ val_dir = val_artifact.download()
+ val_path = Path(val_dir) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ if train_dir or val_dir:
+ ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')
+ with open(ddp_data_path, 'w') as f:
+ yaml.dump(data_dict, f)
+ opt.data = ddp_data_path
+
+
+class WandbLogger():
+ def __init__(self, opt, name, run_id, data_dict, job_type='Training'):
+ # Pre-training routine --
+ self.job_type = job_type
+ self.wandb, self.wandb_run, self.data_dict = wandb, None if not wandb else wandb.run, data_dict
+ # It's more elegant to stick to 1 wandb.init call, but useful config data is overwritten in the WandbLogger's wandb.init call
+ if isinstance(opt.resume, str): # checks resume from artifact
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ run_id, project, model_artifact_name = get_run_info(opt.resume)
+ model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name
+ assert wandb, 'install wandb to resume wandb runs'
+ # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config
+ self.wandb_run = wandb.init(id=run_id, project=project, resume='allow')
+ opt.resume = model_artifact_name
+ elif self.wandb:
+ self.wandb_run = wandb.init(config=opt,
+ resume="allow",
+ project='YOLOR' if opt.project == 'runs/train' else Path(opt.project).stem,
+ name=name,
+ job_type=job_type,
+ id=run_id) if not wandb.run else wandb.run
+ if self.wandb_run:
+ if self.job_type == 'Training':
+ if not opt.resume:
+ wandb_data_dict = self.check_and_upload_dataset(opt) if opt.upload_dataset else data_dict
+ # Info useful for resuming from artifacts
+ self.wandb_run.config.opt = vars(opt)
+ self.wandb_run.config.data_dict = wandb_data_dict
+ self.data_dict = self.setup_training(opt, data_dict)
+ if self.job_type == 'Dataset Creation':
+ self.data_dict = self.check_and_upload_dataset(opt)
+ else:
+ prefix = colorstr('wandb: ')
+ print(f"{prefix}Install Weights & Biases for YOLOR logging with 'pip install wandb' (recommended)")
+
+ def check_and_upload_dataset(self, opt):
+ assert wandb, 'Install wandb to upload dataset'
+ check_dataset(self.data_dict)
+ config_path = self.log_dataset_artifact(opt.data,
+ opt.single_cls,
+ 'YOLOR' if opt.project == 'runs/train' else Path(opt.project).stem)
+ print("Created dataset config file ", config_path)
+ with open(config_path) as f:
+ wandb_data_dict = yaml.load(f, Loader=yaml.SafeLoader)
+ return wandb_data_dict
+
+ def setup_training(self, opt, data_dict):
+ self.log_dict, self.current_epoch, self.log_imgs = {}, 0, 16 # Logging Constants
+ self.bbox_interval = opt.bbox_interval
+ if isinstance(opt.resume, str):
+ modeldir, _ = self.download_model_artifact(opt)
+ if modeldir:
+ self.weights = Path(modeldir) / "last.pt"
+ config = self.wandb_run.config
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp = str(
+ self.weights), config.save_period, config.total_batch_size, config.bbox_interval, config.epochs, \
+ config.opt['hyp']
+ data_dict = dict(self.wandb_run.config.data_dict) # eliminates the need for config file to resume
+ if 'val_artifact' not in self.__dict__: # If --upload_dataset is set, use the existing artifact, don't download
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(data_dict.get('train'),
+ opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(data_dict.get('val'),
+ opt.artifact_alias)
+ self.result_artifact, self.result_table, self.val_table, self.weights = None, None, None, None
+ if self.train_artifact_path is not None:
+ train_path = Path(self.train_artifact_path) / 'data/images/'
+ data_dict['train'] = str(train_path)
+ if self.val_artifact_path is not None:
+ val_path = Path(self.val_artifact_path) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ self.val_table = self.val_artifact.get("val")
+ self.map_val_table_path()
+ if self.val_artifact is not None:
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+ self.result_table = wandb.Table(["epoch", "id", "prediction", "avg_confidence"])
+ if opt.bbox_interval == -1:
+ self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ return data_dict
+
+ def download_dataset_artifact(self, path, alias):
+ if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):
+ dataset_artifact = wandb.use_artifact(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + ":" + alias)
+ assert dataset_artifact is not None, "'Error: W&B dataset artifact doesn\'t exist'"
+ datadir = dataset_artifact.download()
+ return datadir, dataset_artifact
+ return None, None
+
+ def download_model_artifact(self, opt):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
+ assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
+ modeldir = model_artifact.download()
+ epochs_trained = model_artifact.metadata.get('epochs_trained')
+ total_epochs = model_artifact.metadata.get('total_epochs')
+ assert epochs_trained < total_epochs, 'training to %g epochs is finished, nothing to resume.' % (
+ total_epochs)
+ return modeldir, model_artifact
+ return None, None
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model', type='model', metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score
+ })
+ model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
+ wandb.log_artifact(model_artifact,
+ aliases=['latest', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
+ print("Saving model artifact on epoch ", epoch + 1)
+
+ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):
+ with open(data_file) as f:
+ data = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])
+ names = {k: v for k, v in enumerate(names)} # to index dictionary
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['train']), names, name='train') if data.get('train') else None
+ self.val_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['val']), names, name='val') if data.get('val') else None
+ if data.get('train'):
+ data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
+ if data.get('val'):
+ data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
+ path = data_file if overwrite_config else '_wandb.'.join(data_file.rsplit('.', 1)) # updated data.yaml path
+ data.pop('download', None)
+ with open(path, 'w') as f:
+ yaml.dump(data, f)
+
+ if self.job_type == 'Training': # builds correct artifact pipeline graph
+ self.wandb_run.use_artifact(self.val_artifact)
+ self.wandb_run.use_artifact(self.train_artifact)
+ self.val_artifact.wait()
+ self.val_table = self.val_artifact.get('val')
+ self.map_val_table_path()
+ else:
+ self.wandb_run.log_artifact(self.train_artifact)
+ self.wandb_run.log_artifact(self.val_artifact)
+ return path
+
+ def map_val_table_path(self):
+ self.val_table_map = {}
+ print("Mapping dataset")
+ for i, data in enumerate(tqdm(self.val_table.data)):
+ self.val_table_map[data[3]] = data[0]
+
+ def create_dataset_table(self, dataset, class_to_id, name='dataset'):
+ # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
+ artifact = wandb.Artifact(name=name, type="dataset")
+ img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
+ img_files = tqdm(dataset.img_files) if not img_files else img_files
+ for img_file in img_files:
+ if Path(img_file).is_dir():
+ artifact.add_dir(img_file, name='data/images')
+ labels_path = 'labels'.join(dataset.path.rsplit('images', 1))
+ artifact.add_dir(labels_path, name='data/labels')
+ else:
+ artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
+ label_file = Path(img2label_paths([img_file])[0])
+ artifact.add_file(str(label_file),
+ name='data/labels/' + label_file.name) if label_file.exists() else None
+ table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
+ for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
+ height, width = shapes[0]
+ labels[:, 2:] = (xywh2xyxy(labels[:, 2:].view(-1, 4))) * torch.Tensor([width, height, width, height])
+ box_data, img_classes = [], {}
+ for cls, *xyxy in labels[:, 1:].tolist():
+ cls = int(cls)
+ box_data.append({"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls]),
+ "scores": {"acc": 1},
+ "domain": "pixel"})
+ img_classes[cls] = class_to_id[cls]
+ boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
+ table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), json.dumps(img_classes),
+ Path(paths).name)
+ artifact.add(table, name)
+ return artifact
+
+ def log_training_progress(self, predn, path, names):
+ if self.val_table and self.result_table:
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])
+ box_data = []
+ total_conf = 0
+ for *xyxy, conf, cls in predn.tolist():
+ if conf >= 0.25:
+ box_data.append(
+ {"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": "%s %.3f" % (names[cls], conf),
+ "scores": {"class_score": conf},
+ "domain": "pixel"})
+ total_conf = total_conf + conf
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ id = self.val_table_map[Path(path).name]
+ self.result_table.add_data(self.current_epoch,
+ id,
+ wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
+ total_conf / max(1, len(box_data))
+ )
+
+ def log(self, log_dict):
+ if self.wandb_run:
+ for key, value in log_dict.items():
+ self.log_dict[key] = value
+
+ def end_epoch(self, best_result=False):
+ if self.wandb_run:
+ wandb.log(self.log_dict)
+ self.log_dict = {}
+ if self.result_artifact:
+ train_results = wandb.JoinedTable(self.val_table, self.result_table, "id")
+ self.result_artifact.add(train_results, 'result')
+ wandb.log_artifact(self.result_artifact, aliases=['latest', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
+ self.result_table = wandb.Table(["epoch", "id", "prediction", "avg_confidence"])
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+
+ def finish_run(self):
+ if self.wandb_run:
+ if self.log_dict:
+ wandb.log(self.log_dict)
+ wandb.run.finish()
diff --git a/ipex/yolov7-seg.pt b/ipex/yolov7-seg.pt
new file mode 100644
index 000000000..80a4d6e01
Binary files /dev/null and b/ipex/yolov7-seg.pt differ
diff --git a/ipex/yolov7.pt b/ipex/yolov7.pt
new file mode 100644
index 000000000..f52d35444
Binary files /dev/null and b/ipex/yolov7.pt differ
diff --git a/oneAPI_ODAV_APP/Data/Data/sample.json b/oneAPI_ODAV_APP/Data/Data/sample.json
new file mode 100644
index 000000000..98a2e69e0
--- /dev/null
+++ b/oneAPI_ODAV_APP/Data/Data/sample.json
@@ -0,0 +1,17 @@
+{
+ "data": [
+ {
+ "userid": "raj713335",
+ "image_url": "Data/Saved_Images/20230608190900.jpg",
+ "w_cord": 0.5150375939849624,
+ "x_cord": 0.5583333333333333,
+ "y_cord": 0.6511278195488722,
+ "z_cord": 0.32,
+ "latitude": 22.529,
+ "longitude": 88.368,
+ "class_of_image": 2,
+ "auto": "No",
+ "uploaded": "No"
+ }
+ ]
+}
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/Data/Images/Background/background.jpg b/oneAPI_ODAV_APP/Data/Images/Background/background.jpg
new file mode 100644
index 000000000..a9e483604
Binary files /dev/null and b/oneAPI_ODAV_APP/Data/Images/Background/background.jpg differ
diff --git a/oneAPI_ODAV_APP/Data/Images/Background/background_2.jpg b/oneAPI_ODAV_APP/Data/Images/Background/background_2.jpg
new file mode 100644
index 000000000..71e80433c
Binary files /dev/null and b/oneAPI_ODAV_APP/Data/Images/Background/background_2.jpg differ
diff --git a/oneAPI_ODAV_APP/Data/Images/Background/load.gif b/oneAPI_ODAV_APP/Data/Images/Background/load.gif
new file mode 100644
index 000000000..0d94ca727
Binary files /dev/null and b/oneAPI_ODAV_APP/Data/Images/Background/load.gif differ
diff --git a/oneAPI_ODAV_APP/Data/Images/Background/logo.png b/oneAPI_ODAV_APP/Data/Images/Background/logo.png
new file mode 100644
index 000000000..9b4ba7a39
Binary files /dev/null and b/oneAPI_ODAV_APP/Data/Images/Background/logo.png differ
diff --git a/oneAPI_ODAV_APP/Data/Images/Background/no_image.jpg b/oneAPI_ODAV_APP/Data/Images/Background/no_image.jpg
new file mode 100644
index 000000000..0d85156cc
Binary files /dev/null and b/oneAPI_ODAV_APP/Data/Images/Background/no_image.jpg differ
diff --git a/oneAPI_ODAV_APP/Data/Images/icons/favicon.ico b/oneAPI_ODAV_APP/Data/Images/icons/favicon.ico
new file mode 100644
index 000000000..6f55c8a52
Binary files /dev/null and b/oneAPI_ODAV_APP/Data/Images/icons/favicon.ico differ
diff --git a/oneAPI_ODAV_APP/Data/Keys/config.ini b/oneAPI_ODAV_APP/Data/Keys/config.ini
new file mode 100644
index 000000000..7517444db
--- /dev/null
+++ b/oneAPI_ODAV_APP/Data/Keys/config.ini
@@ -0,0 +1,4 @@
+[TOKEN]
+token = 1362521589:AAETxO9b_8NLgVpCVe4yD4I5q9U2SwPeYbw
+up_url = raj713335
+
diff --git a/oneAPI_ODAV_APP/Data/Keys/pyinstallerx.txt b/oneAPI_ODAV_APP/Data/Keys/pyinstallerx.txt
new file mode 100644
index 000000000..e9f03365f
--- /dev/null
+++ b/oneAPI_ODAV_APP/Data/Keys/pyinstallerx.txt
@@ -0,0 +1 @@
+pyinstaller -i "favicon.ico" --onefile -w --hiddenimport=EasyTkinter --hiddenimport=Pillow --hiddenimport=opencv-python --hiddenimport=requests--hiddenimport=Configparser --hiddenimport=PyAutoGUI --hiddenimport=numpy --hiddenimport=pandas --hiddenimport=urllib3 --hiddenimport=tensorflow --hiddenimport=scikit-learn --hiddenimport=wget --hiddenimport=pygame --hiddenimport=dlib --hiddenimport=imutils --hiddenimport=deepface --hiddenimport=keras --hiddenimport=cvlib --name Neom home.py
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/Data/Saved_Images/20230608190900.jpg b/oneAPI_ODAV_APP/Data/Saved_Images/20230608190900.jpg
new file mode 100644
index 000000000..e37eaf7a0
Binary files /dev/null and b/oneAPI_ODAV_APP/Data/Saved_Images/20230608190900.jpg differ
diff --git a/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM.py b/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM.py
new file mode 100644
index 000000000..a6a23d7f0
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM.py
@@ -0,0 +1,252 @@
+import torch
+
+def AI_DASH_CAM(source="0", model_weights="../Model/yolov7.pt"):
+
+ import random
+ import numpy as np
+ import cv2
+ from datetime import datetime
+ import torch
+ import torch.backends.cudnn as cudnn
+
+ from models.experimental import attempt_load
+ from utils.datasets import LoadStreams, LoadImages
+ from utils.general import check_img_size, check_requirements, check_imshow, non_max_suppression, apply_classifier, \
+ scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path
+ from utils.plots import plot_one_box
+ from utils.torch_utils import select_device, load_classifier, time_synchronized, TracedModel
+
+ device = 'cuda' if torch.cuda.is_available() else 'cpu'
+ weights = model_weights
+ img_size = 640
+ iou_thres = 0.45
+ conf_thres = 0.5
+
+ font = cv2.FONT_HERSHEY_SIMPLEX
+
+ webcam = source.isnumeric()
+
+ # Initialize
+ set_logging()
+ device = select_device(device)
+ half = device.type != 'cpu' # half precision only supported on CUDA
+
+ # Load model
+ model = attempt_load(weights, map_location=device) # load FP32 model
+ stride = int(model.stride.max()) # model stride
+ imgsz = check_img_size(img_size, s=stride) # check img_size
+
+ if half:
+ model.half() # to FP16
+
+ # Set Dataloader
+ if webcam:
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride)
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride)
+
+ # Get names and colors
+ names = model.module.names if hasattr(model, 'module') else model.names
+
+ # colors = [(255, 255, 255), (255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255), (255, 0, 255)
+ # , (155, 255, 100), (255, 155, 100), (155, 100, 255), (155, 155, 100)]
+
+ colors = [[random.randint(0, 255) for _ in range(3)] for _ in names]
+
+ colors[0:11] = [(255, 255, 255), (255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255), (255, 0, 255)
+ , (155, 255, 100), (255, 155, 100), (155, 100, 255), (155, 155, 100)]
+
+ # Run inference
+ if device.type != 'cpu':
+ model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
+ old_img_w = old_img_h = imgsz
+ old_img_b = 1
+
+ TOTAL = 0
+ person = 0
+ bicycle = 0
+ car = 0
+ motorcycle = 0
+ bus = 0
+ truck = 0
+ traffic_light = 0
+ stop_sign = 0
+ parking_meter = 0
+ potted_plant = 0
+ clock = 0
+
+
+ for path, img, im0s, vid_cap in dataset:
+
+ img = torch.from_numpy(img).to(device)
+ img = img.half() if half else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ if img.ndimension() == 3:
+ img = img.unsqueeze(0)
+
+ # Warmup
+ if device.type != 'cpu' and (
+ old_img_b != img.shape[0] or old_img_h != img.shape[2] or old_img_w != img.shape[3]):
+ old_img_b = img.shape[0]
+ old_img_h = img.shape[2]
+ old_img_w = img.shape[3]
+
+ with torch.no_grad(): # Calculating gradients would cause a GPU memory leak
+ pred = model(img)[0]
+
+ # Apply NMS
+ pred = non_max_suppression(pred, conf_thres, iou_thres)
+
+ # Process detections
+ current_frame = 0
+ for i, det in enumerate(pred): # detections per image
+
+ if webcam: # batch_size >= 1
+ p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.count
+ else:
+ p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)
+
+ im0 = cv2.resize(im0, (640, 480))
+
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
+
+ for c in det[:, -1].unique():
+ n = (det[:, -1] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ label = f'{names[int(cls)]} {conf:.2f}'
+ TOTAL += 1
+ labelx = names[int(cls)]
+ current_frame += 1
+ #plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=1)
+ if labelx == 'person':
+ plot_one_box(xyxy, im0, label=label, color=colors[0], line_thickness=1)
+ person += 1
+ elif labelx == 'bicycle':
+ plot_one_box(xyxy, im0, label=label, color=colors[1], line_thickness=1)
+ bicycle += 1
+ elif labelx == 'car':
+ plot_one_box(xyxy, im0, label=label, color=colors[2], line_thickness=1)
+ car += 1
+ elif labelx == 'motorcycle':
+ plot_one_box(xyxy, im0, label=label, color=colors[3], line_thickness=1)
+ motorcycle += 1
+ elif labelx == 'bus':
+ plot_one_box(xyxy, im0, label=label, color=colors[4], line_thickness=1)
+ bus += 1
+ elif labelx == 'truck':
+ plot_one_box(xyxy, im0, label=label, color=colors[5], line_thickness=1)
+ truck += 1
+ elif labelx == 'traffic light':
+ plot_one_box(xyxy, im0, label=label, color=colors[6], line_thickness=1)
+ traffic_light += 1
+ elif labelx == 'stop sign':
+ plot_one_box(xyxy, im0, label=label, color=colors[7], line_thickness=1)
+ stop_sign += 1
+ elif labelx == 'parking meter':
+ plot_one_box(xyxy, im0, label=label, color=colors[8], line_thickness=1)
+ parking_meter += 1
+ elif labelx == 'potted plant':
+ plot_one_box(xyxy, im0, label=label, color=colors[9], line_thickness=1)
+ potted_plant += 1
+ elif labelx == 'clock':
+ plot_one_box(xyxy, im0, label=label, color=colors[10], line_thickness=1)
+ clock += 1
+ else:
+ plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=1)
+
+
+
+ (H, W) = im0.shape[:2]
+
+ print(" ")
+
+
+ cv2.putText(im0, "oneAPI ODAV", (250, 40),
+ font, 0.7 * 1, (0, 255, 0), 2)
+ cv2.rectangle(im0, (20, 50), (W - 20, 15), (0, 255, 0), 2)
+
+
+
+
+ sub_img = im0[H - 300: H, 0:200]
+ black_rect = np.ones(sub_img.shape, dtype=np.uint8) * 0
+
+ res = cv2.addWeighted(sub_img, 0.8, black_rect, 0.2, 1.0)
+
+ im0[H - 300:H + 40, 0:200] = res
+
+ cv2.putText(im0, str("PERSON: " + str(person)), (30, H - 280),
+ font, 0.4 * 1, colors[0], 1)
+ cv2.rectangle(im0, (10, H - 280), (20, H-285), colors[0], 7)
+
+ cv2.putText(im0, str("BICYCLE: " + str(bicycle)), (30, H - 255),
+ font, 0.4 * 1, colors[1], 1)
+ cv2.rectangle(im0, (10, H - 255), (20, H - 260), colors[1], 7)
+
+ cv2.putText(im0, str("CAR: " + str(car)), (30, H - 230),
+ font, 0.4 * 1, colors[2], 1)
+ cv2.rectangle(im0, (10, H - 230), (20, H - 235), colors[2], 7)
+
+ cv2.putText(im0, str("MOTORCYCLE: " + str(motorcycle)), (30, H - 205),
+ font, 0.4 * 1, colors[3], 1)
+ cv2.rectangle(im0, (10, H - 205), (20, H - 210), colors[3], 7)
+
+ cv2.putText(im0, str("BUS: " + str(bus)), (30, H - 180),
+ font, 0.4 * 1, colors[4], 1)
+ cv2.rectangle(im0, (10, H - 180), (20, H - 185), colors[4], 7)
+
+ cv2.putText(im0, str("TRUCK: " + str(truck)), (30, H - 155),
+ font, 0.4 * 1, colors[5], 1)
+ cv2.rectangle(im0, (10, H - 155), (20, H - 160), colors[5], 7)
+
+ cv2.putText(im0, str("TRAFFIC LIGHT: " + str(traffic_light)), (30, H - 130),
+ font, 0.4 * 1, colors[6], 1)
+ cv2.rectangle(im0, (10, H - 130), (20, H - 135), colors[6], 7)
+
+ cv2.putText(im0, str("STOP SIGN: " + str(stop_sign)), (30, H - 105),
+ font, 0.4 * 1, colors[7], 1)
+ cv2.rectangle(im0, (10, H - 105), (20, H - 100), colors[7], 7)
+
+ cv2.putText(im0, str("PARKING METER: " + str(parking_meter)), (30, H - 80),
+ font, 0.4 * 1, colors[8], 1)
+ cv2.rectangle(im0, (10, H - 80), (20, H - 85), colors[8], 7)
+
+ cv2.putText(im0, str("POTTED PLANT: " + str(potted_plant)), (30, H - 55),
+ font, 0.4 * 1, colors[9], 1)
+ cv2.rectangle(im0, (10, H - 55), (20, H - 60), colors[9], 7)
+
+ cv2.putText(im0, str("CLOCK: " + str(clock)), (30, H - 30),
+ font, 0.4 * 1, colors[10], 1)
+ cv2.rectangle(im0, (10, H - 30), (20, H - 35), colors[10], 7)
+
+ cv2.putText(im0, str("TOTAL: " + str(TOTAL)), (30, H - 5),
+ font, 0.4 * 1, (0, 0, 0), 1)
+
+ cv2.putText(im0, str("CURRENT FRAME: " + str(current_frame)), (W - 225, H - 35),
+ font, 0.7 * 1, (0, 0, 255), 2)
+
+ now = datetime.now()
+
+ timex = str(now.strftime("%d/%m/%Y %H:%M:%S"))
+ cv2.putText(im0, timex, (W - 200, H - 10),
+ font, 0.5 * 1, (255, 255, 255), 1)
+
+ cv2.namedWindow("Output", cv2.WINDOW_NORMAL)
+ cv2.setWindowProperty("Output", cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN)
+ cv2.imshow("Output", im0)
+
+ if (cv2.waitKey(1) & 0xFF == ord('q')):
+ break
+
+
+ cv2.destroyAllWindows()
+
+# if __name__ == '__main__':
+# with torch.no_grad():
+# AI_DASH_CAM("../TEST_VIDEO/Visual_Pollution.mp4")
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM_IMAGE.py b/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM_IMAGE.py
new file mode 100644
index 000000000..3c86fa575
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM_IMAGE.py
@@ -0,0 +1,249 @@
+import torch
+
+def AI_DASH_CAM_IMAGE(source="0", model_weights="../Model/yolov7.pt"):
+
+ import random
+ import numpy as np
+ import cv2
+ from datetime import datetime
+ import torch
+ import torch.backends.cudnn as cudnn
+
+ from models.experimental import attempt_load
+ from utils.datasets import LoadStreams, LoadImages
+ from utils.general import check_img_size, check_requirements, check_imshow, non_max_suppression, apply_classifier, \
+ scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path
+ from utils.plots import plot_one_box
+ from utils.torch_utils import select_device, load_classifier, time_synchronized, TracedModel
+
+ device = 'cuda' if torch.cuda.is_available() else 'cpu'
+ weights = model_weights
+ img_size = 640
+ iou_thres = 0.45
+ conf_thres = 0.5
+
+ font = cv2.FONT_HERSHEY_SIMPLEX
+
+ webcam = source.isnumeric()
+
+ # Initialize
+ set_logging()
+ device = select_device(device)
+ half = device.type != 'cpu' # half precision only supported on CUDA
+
+ # Load model
+ model = attempt_load(weights, map_location=device) # load FP32 model
+ stride = int(model.stride.max()) # model stride
+ imgsz = check_img_size(img_size, s=stride) # check img_size
+
+ if half:
+ model.half() # to FP16
+
+ # Set Dataloader
+ if webcam:
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride)
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride)
+
+ # Get names and colors
+ names = model.module.names if hasattr(model, 'module') else model.names
+
+ # colors = [(255, 255, 255), (255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255), (255, 0, 255)
+ # , (155, 255, 100), (255, 155, 100), (155, 100, 255), (155, 155, 100)]
+
+ colors = [[random.randint(0, 255) for _ in range(3)] for _ in names]
+
+ colors[0:11] = [(255, 255, 255), (255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255), (255, 0, 255)
+ , (155, 255, 100), (255, 155, 100), (155, 100, 255), (155, 155, 100)]
+
+ # Run inference
+ if device.type != 'cpu':
+ model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
+ old_img_w = old_img_h = imgsz
+ old_img_b = 1
+
+ TOTAL = 0
+ person = 0
+ bicycle = 0
+ car = 0
+ motorcycle = 0
+ bus = 0
+ truck = 0
+ traffic_light = 0
+ stop_sign = 0
+ parking_meter = 0
+ potted_plant = 0
+ clock = 0
+
+
+ for path, img, im0s, vid_cap in dataset:
+
+ img = torch.from_numpy(img).to(device)
+ img = img.half() if half else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ if img.ndimension() == 3:
+ img = img.unsqueeze(0)
+
+ # Warmup
+ if device.type != 'cpu' and (
+ old_img_b != img.shape[0] or old_img_h != img.shape[2] or old_img_w != img.shape[3]):
+ old_img_b = img.shape[0]
+ old_img_h = img.shape[2]
+ old_img_w = img.shape[3]
+
+ with torch.no_grad(): # Calculating gradients would cause a GPU memory leak
+ pred = model(img)[0]
+
+ # Apply NMS
+ pred = non_max_suppression(pred, conf_thres, iou_thres)
+
+ # Process detections
+ current_frame = 0
+ for i, det in enumerate(pred): # detections per image
+
+ if webcam: # batch_size >= 1
+ p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.count
+ else:
+ p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)
+
+ im0 = cv2.resize(im0, (640, 480))
+
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
+
+ for c in det[:, -1].unique():
+ n = (det[:, -1] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ label = f'{names[int(cls)]} {conf:.2f}'
+ TOTAL += 1
+ labelx = names[int(cls)]
+ current_frame += 1
+ # plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=1)
+ if labelx == 'person':
+ plot_one_box(xyxy, im0, label=label, color=colors[0], line_thickness=1)
+ person += 1
+ elif labelx == 'bicycle':
+ plot_one_box(xyxy, im0, label=label, color=colors[1], line_thickness=1)
+ bicycle += 1
+ elif labelx == 'car':
+ plot_one_box(xyxy, im0, label=label, color=colors[2], line_thickness=1)
+ car += 1
+ elif labelx == 'motorcycle':
+ plot_one_box(xyxy, im0, label=label, color=colors[3], line_thickness=1)
+ motorcycle += 1
+ elif labelx == 'bus':
+ plot_one_box(xyxy, im0, label=label, color=colors[4], line_thickness=1)
+ bus += 1
+ elif labelx == 'truck':
+ plot_one_box(xyxy, im0, label=label, color=colors[5], line_thickness=1)
+ truck += 1
+ elif labelx == 'traffic light':
+ plot_one_box(xyxy, im0, label=label, color=colors[6], line_thickness=1)
+ traffic_light += 1
+ elif labelx == 'stop sign':
+ plot_one_box(xyxy, im0, label=label, color=colors[7], line_thickness=1)
+ stop_sign += 1
+ elif labelx == 'parking meter':
+ plot_one_box(xyxy, im0, label=label, color=colors[8], line_thickness=1)
+ parking_meter += 1
+ elif labelx == 'potted plant':
+ plot_one_box(xyxy, im0, label=label, color=colors[9], line_thickness=1)
+ potted_plant += 1
+ elif labelx == 'clock':
+ plot_one_box(xyxy, im0, label=label, color=colors[10], line_thickness=1)
+ clock += 1
+ else:
+ plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=1)
+
+ (H, W) = im0.shape[:2]
+
+ print(" ")
+
+
+ cv2.putText(im0, "oneAPI ODAV", (250, 40),
+ font, 0.7 * 1, (255, 255, 255), 2)
+ cv2.rectangle(im0, (20, 50), (W - 20, 15), (255, 255, 255), 2)
+
+
+
+
+ sub_img = im0[H - 300: H, 0:200]
+ black_rect = np.ones(sub_img.shape, dtype=np.uint8) * 0
+
+ res = cv2.addWeighted(sub_img, 0.8, black_rect, 0.2, 1.0)
+
+ im0[H - 300:H + 40, 0:200] = res
+
+ cv2.putText(im0, str("PERSON: " + str(person)), (30, H - 280),
+ font, 0.4 * 1, colors[0], 1)
+ cv2.rectangle(im0, (10, H - 280), (20, H - 285), colors[0], 7)
+
+ cv2.putText(im0, str("BICYCLE: " + str(bicycle)), (30, H - 255),
+ font, 0.4 * 1, colors[1], 1)
+ cv2.rectangle(im0, (10, H - 255), (20, H - 260), colors[1], 7)
+
+ cv2.putText(im0, str("CAR: " + str(car)), (30, H - 230),
+ font, 0.4 * 1, colors[2], 1)
+ cv2.rectangle(im0, (10, H - 230), (20, H - 235), colors[2], 7)
+
+ cv2.putText(im0, str("MOTORCYCLE: " + str(motorcycle)), (30, H - 205),
+ font, 0.4 * 1, colors[3], 1)
+ cv2.rectangle(im0, (10, H - 205), (20, H - 210), colors[3], 7)
+
+ cv2.putText(im0, str("BUS: " + str(bus)), (30, H - 180),
+ font, 0.4 * 1, colors[4], 1)
+ cv2.rectangle(im0, (10, H - 180), (20, H - 185), colors[4], 7)
+
+ cv2.putText(im0, str("TRUCK: " + str(truck)), (30, H - 155),
+ font, 0.4 * 1, colors[5], 1)
+ cv2.rectangle(im0, (10, H - 155), (20, H - 160), colors[5], 7)
+
+ cv2.putText(im0, str("TRAFFIC LIGHT: " + str(traffic_light)), (30, H - 130),
+ font, 0.4 * 1, colors[6], 1)
+ cv2.rectangle(im0, (10, H - 130), (20, H - 135), colors[6], 7)
+
+ cv2.putText(im0, str("STOP SIGN: " + str(stop_sign)), (30, H - 105),
+ font, 0.4 * 1, colors[7], 1)
+ cv2.rectangle(im0, (10, H - 105), (20, H - 100), colors[7], 7)
+
+ cv2.putText(im0, str("PARKING METER: " + str(parking_meter)), (30, H - 80),
+ font, 0.4 * 1, colors[8], 1)
+ cv2.rectangle(im0, (10, H - 80), (20, H - 85), colors[8], 7)
+
+ cv2.putText(im0, str("POTTED PLANT: " + str(potted_plant)), (30, H - 55),
+ font, 0.4 * 1, colors[9], 1)
+ cv2.rectangle(im0, (10, H - 55), (20, H - 60), colors[9], 7)
+
+ cv2.putText(im0, str("CLOCK: " + str(clock)), (30, H - 30),
+ font, 0.4 * 1, colors[10], 1)
+ cv2.rectangle(im0, (10, H - 30), (20, H - 35), colors[10], 7)
+
+ cv2.putText(im0, str("TOTAL: " + str(TOTAL)), (30, H - 5),
+ font, 0.4 * 1, (0, 0, 0), 1)
+
+ cv2.putText(im0, str("CURRENT FRAME: " + str(current_frame)), (W - 225, H - 35),
+ font, 0.7 * 1, (0, 0, 255), 2)
+
+ now = datetime.now()
+
+ timex = str(now.strftime("%d/%m/%Y %H:%M:%S"))
+ cv2.putText(im0, timex, (W - 200, H - 10),
+ font, 0.5 * 1, (255, 255, 255), 1)
+
+ cv2.namedWindow("Output", cv2.WINDOW_NORMAL)
+ cv2.setWindowProperty("Output", cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN)
+ cv2.imshow("Output", im0)
+
+ cv2.waitKey(5000)
+
+
+ cv2.destroyAllWindows()
+
+# if __name__ == '__main__':
+# with torch.no_grad():
+# AI_DASH_CAM_IMAGE("../TEST_VIDEO/test3.png")
diff --git a/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM_SEG.py b/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM_SEG.py
new file mode 100644
index 000000000..5982f19cd
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/AI_DASH_CAM_SEG.py
@@ -0,0 +1,245 @@
+import torch
+
+def AI_DASH_CAM_SEG(source="0", model_weights="../Model/yolov7.pt"):
+
+ import matplotlib.pyplot as plt
+ import torch
+ import cv2
+ import yaml
+ from torchvision import transforms
+ import numpy as np
+
+ from utils.datasets import letterbox
+ from utils.general import non_max_suppression_mask_conf
+
+ from detectron2.modeling.poolers import ROIPooler
+ from detectron2.structures import Boxes
+ from detectron2.utils.memory import retry_if_cuda_oom
+ from detectron2.layers import paste_masks_in_image
+
+ device = 'cuda' if torch.cuda.is_available() else 'cpu'
+ weights = model_weights
+ img_size = 640
+ iou_thres = 0.45
+ conf_thres = 0.5
+
+ font = cv2.FONT_HERSHEY_SIMPLEX
+
+ webcam = source.isnumeric()
+
+ # Initialize
+ set_logging()
+ device = select_device(device)
+ half = device.type != 'cpu' # half precision only supported on CUDA
+
+ # Load model
+ model = attempt_load(weights, map_location=device) # load FP32 model
+ stride = int(model.stride.max()) # model stride
+ imgsz = check_img_size(img_size, s=stride) # check img_size
+
+ if half:
+ model.half() # to FP16
+
+ # Set Dataloader
+ if webcam:
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride)
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride)
+
+ # Get names and colors
+ names = model.module.names if hasattr(model, 'module') else model.names
+
+ colors = [(255, 255, 255), (255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255), (255, 0, 255)
+ , (155, 255, 100), (255, 155, 100), (155, 100, 255), (155, 155, 100)]
+
+ # Run inference
+ if device.type != 'cpu':
+ model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
+ old_img_w = old_img_h = imgsz
+ old_img_b = 1
+
+ TOTAL = 0
+ GRAFFITI = 0
+ FADED_SIGNAGE = 0
+ POTHOLES = 0
+ GARBAGE = 0
+ CONSTRUCTION_ROAD = 0
+ BROKEN_SIGNAGE = 0
+ BAD_STREETLIGHT = 0
+ BAD_BILLBOARD = 0
+ SAND_ON_ROAD = 0
+ CLUTTER_SIDEWALK = 0
+ UNKEPT_FACADE = 0
+
+
+ for path, img, im0s, vid_cap in dataset:
+
+ img = torch.from_numpy(img).to(device)
+ img = img.half() if half else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ if img.ndimension() == 3:
+ img = img.unsqueeze(0)
+
+ # Warmup
+ if device.type != 'cpu' and (
+ old_img_b != img.shape[0] or old_img_h != img.shape[2] or old_img_w != img.shape[3]):
+ old_img_b = img.shape[0]
+ old_img_h = img.shape[2]
+ old_img_w = img.shape[3]
+
+ with torch.no_grad(): # Calculating gradients would cause a GPU memory leak
+ pred = model(img)[0]
+
+ # Apply NMS
+ pred = non_max_suppression(pred, conf_thres, iou_thres)
+
+ # Process detections
+ current_frame_potholes = 0
+ for i, det in enumerate(pred): # detections per image
+
+ if webcam: # batch_size >= 1
+ p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.count
+ else:
+ p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)
+
+ im0 = cv2.resize(im0, (640, 480))
+
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
+
+ for c in det[:, -1].unique():
+ n = (det[:, -1] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ label = f'{names[int(cls)]} {conf:.2f}'
+ TOTAL += 1
+ labelx = names[int(cls)]
+ current_frame_potholes += 1
+ plot_one_box(xyxy, im0, label=label, color=colors[0], line_thickness=1)
+ if labelx == 'GRAFFITI':
+ plot_one_box(xyxy, im0, label=label, color=colors[0], line_thickness=1)
+ GRAFFITI += 1
+ elif labelx == 'FADED SIGNAGE':
+ plot_one_box(xyxy, im0, label=label, color=colors[1], line_thickness=1)
+ FADED_SIGNAGE += 1
+ elif labelx == 'POTHOLES':
+ plot_one_box(xyxy, im0, label=label, color=colors[2], line_thickness=1)
+ POTHOLES += 1
+ elif labelx == 'GARBAGE':
+ plot_one_box(xyxy, im0, label=label, color=colors[3], line_thickness=1)
+ GARBAGE += 1
+ elif labelx == 'CONSTRUCTION ROAD':
+ plot_one_box(xyxy, im0, label=label, color=colors[4], line_thickness=1)
+ CONSTRUCTION_ROAD += 1
+ elif labelx == 'BROKEN SIGNAGE':
+ plot_one_box(xyxy, im0, label=label, color=colors[5], line_thickness=1)
+ BROKEN_SIGNAGE += 1
+ elif labelx == 'BAD STREETLIGHT':
+ plot_one_box(xyxy, im0, label=label, color=colors[6], line_thickness=1)
+ BAD_STREETLIGHT += 1
+ elif labelx == 'BAD BILLBOARD':
+ plot_one_box(xyxy, im0, label=label, color=colors[7], line_thickness=1)
+ BAD_BILLBOARD += 1
+ elif labelx == 'SAND ON ROAD':
+ plot_one_box(xyxy, im0, label=label, color=colors[8], line_thickness=1)
+ SAND_ON_ROAD += 1
+ elif labelx == 'CLUTTER SIDEWALK':
+ plot_one_box(xyxy, im0, label=label, color=colors[9], line_thickness=1)
+ CLUTTER_SIDEWALK += 1
+ elif labelx == 'UNKEPT FACADE':
+ plot_one_box(xyxy, im0, label=label, color=colors[10], line_thickness=1)
+ UNKEPT_FACADE += 1
+
+
+ (H, W) = im0.shape[:2]
+
+ print(" ")
+
+
+ cv2.putText(im0, "oneAPI ODAV", (250, 40),
+ font, 0.7 * 1, (255, 255, 255), 2)
+ cv2.rectangle(im0, (20, 50), (W - 20, 15), (255, 255, 255), 2)
+
+
+
+
+ sub_img = im0[H - 300: H, 0:200]
+ black_rect = np.ones(sub_img.shape, dtype=np.uint8) * 0
+
+ res = cv2.addWeighted(sub_img, 0.8, black_rect, 0.2, 1.0)
+
+ im0[H - 300:H + 40, 0:200] = res
+
+ cv2.putText(im0, str("GRAFFITI: " + str(GRAFFITI)), (30, H - 280),
+ font, 0.4 * 1, colors[0], 1)
+ cv2.rectangle(im0, (10, H - 280), (20, H-285), colors[0], 7)
+
+ cv2.putText(im0, str("FADED SIGNAGE: " + str(FADED_SIGNAGE)), (30, H - 255),
+ font, 0.4 * 1, colors[1], 1)
+ cv2.rectangle(im0, (10, H - 255), (20, H - 260), colors[1], 7)
+
+ cv2.putText(im0, str("POTHOLES: " + str(POTHOLES)), (30, H - 230),
+ font, 0.4 * 1, colors[2], 1)
+ cv2.rectangle(im0, (10, H - 230), (20, H - 235), colors[2], 7)
+
+ cv2.putText(im0, str("GARBAGE: " + str(GARBAGE)), (30, H - 205),
+ font, 0.4 * 1, colors[3], 1)
+ cv2.rectangle(im0, (10, H - 205), (20, H - 210), colors[3], 7)
+
+ cv2.putText(im0, str("CONSTRUCTION ROAD: " + str(CONSTRUCTION_ROAD)), (30, H - 180),
+ font, 0.4 * 1, colors[4], 1)
+ cv2.rectangle(im0, (10, H - 180), (20, H - 185), colors[4], 7)
+
+ cv2.putText(im0, str("BROKEN SIGNAGE: " + str(BROKEN_SIGNAGE)), (30, H - 155),
+ font, 0.4 * 1, colors[5], 1)
+ cv2.rectangle(im0, (10, H - 155), (20, H - 160), colors[5], 7)
+
+ cv2.putText(im0, str("BAD STREETLIGHT: " + str(BAD_STREETLIGHT)), (30, H - 130),
+ font, 0.4 * 1, colors[6], 1)
+ cv2.rectangle(im0, (10, H - 130), (20, H - 135), colors[6], 7)
+
+ cv2.putText(im0, str("BAD BILLBOARD: " + str(BAD_BILLBOARD)), (30, H - 105),
+ font, 0.4 * 1, colors[7], 1)
+ cv2.rectangle(im0, (10, H - 105), (20, H - 100), colors[7], 7)
+
+ cv2.putText(im0, str("SAND ON ROAD: " + str(SAND_ON_ROAD)), (30, H - 80),
+ font, 0.4 * 1, colors[8], 1)
+ cv2.rectangle(im0, (10, H - 80), (20, H - 85), colors[8], 7)
+
+ cv2.putText(im0, str("CLUTTER SIDEWALK: " + str(CLUTTER_SIDEWALK)), (30, H - 55),
+ font, 0.4 * 1, colors[9], 1)
+ cv2.rectangle(im0, (10, H - 55), (20, H - 60), colors[9], 7)
+
+ cv2.putText(im0, str("UNKEPT FACADE: " + str(UNKEPT_FACADE)), (30, H - 30),
+ font, 0.4 * 1, colors[10], 1)
+ cv2.rectangle(im0, (10, H - 30), (20, H - 35), colors[10], 7)
+
+ cv2.putText(im0, str("TOTAL: " + str(TOTAL)), (30, H - 5),
+ font, 0.4 * 1, (0, 0, 0), 1)
+
+ cv2.putText(im0, str("CURRENT FRAME: " + str(current_frame_potholes)), (W - 225, H - 35),
+ font, 0.7 * 1, (0, 0, 255), 2)
+
+ now = datetime.now()
+
+ timex = str(now.strftime("%d/%m/%Y %H:%M:%S"))
+ cv2.putText(im0, timex, (W - 200, H - 10),
+ font, 0.5 * 1, (255, 255, 255), 1)
+
+ cv2.namedWindow("Output", cv2.WINDOW_NORMAL)
+ cv2.setWindowProperty("Output", cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN)
+ cv2.imshow("Output", im0)
+
+ if (cv2.waitKey(1) & 0xFF == ord('q')):
+ break
+
+
+ cv2.destroyAllWindows()
+
+# if __name__ == '__main__':
+# with torch.no_grad():
+# AI_DASH_CAM("../TEST_VIDEO/Visual_Pollution.mp4")
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/ENGINES/AI_POTHOLES_DETECTION.py b/oneAPI_ODAV_APP/ENGINES/AI_POTHOLES_DETECTION.py
new file mode 100644
index 000000000..7dc05feb5
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/AI_POTHOLES_DETECTION.py
@@ -0,0 +1,196 @@
+import torch
+
+def AI_POTHOLES_DETECTION(source="0", model_weights="../Model/potholes_detector.pt"):
+
+ from pathlib import Path
+ import numpy as np
+
+
+ import cv2
+ from datetime import datetime
+ import torch
+ import torch.backends.cudnn as cudnn
+
+
+ from models.experimental import attempt_load
+ from utils.datasets import LoadStreams, LoadImages
+ from utils.general import check_img_size, check_requirements, check_imshow, non_max_suppression, apply_classifier, \
+ scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path
+ from utils.plots import plot_one_box
+ from utils.torch_utils import select_device, load_classifier, time_synchronized, TracedModel
+
+ device = 'cuda' if torch.cuda.is_available() else 'cpu'
+ weights = model_weights
+ img_size = 640
+ iou_thres = 0.45
+ conf_thres = 0.5
+
+ font = cv2.FONT_HERSHEY_SIMPLEX
+
+ webcam = source.isnumeric()
+
+ # Initialize
+ set_logging()
+ device = select_device(device)
+ half = device.type != 'cpu' # half precision only supported on CUDA
+
+ # Load model
+ model = attempt_load(weights, map_location=device) # load FP32 model
+ stride = int(model.stride.max()) # model stride
+ imgsz = check_img_size(img_size, s=stride) # check img_size
+
+ if half:
+ model.half() # to FP16
+
+ # Set Dataloader
+ if webcam:
+ view_img = check_imshow()
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride)
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride)
+
+ # Get names and colors
+ names = model.module.names if hasattr(model, 'module') else model.names
+ # colors = [[random.randint(0, 255) for _ in range(3)] for _ in names]
+ colors = [(0, 255, 0), (0, 255, 255), (0, 0, 255)]
+
+ # Run inference
+ if device.type != 'cpu':
+ model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
+ old_img_w = old_img_h = imgsz
+ old_img_b = 1
+
+ pot_holes = 0
+ high = 0
+ medium = 0
+ low = 0
+ for path, img, im0s, vid_cap in dataset:
+
+ img = torch.from_numpy(img).to(device)
+ img = img.half() if half else img.float() # uint8 to fp16/32
+ img /= 255.0 # 0 - 255 to 0.0 - 1.0
+ if img.ndimension() == 3:
+ img = img.unsqueeze(0)
+
+ # Warmup
+ if device.type != 'cpu' and (
+ old_img_b != img.shape[0] or old_img_h != img.shape[2] or old_img_w != img.shape[3]):
+ old_img_b = img.shape[0]
+ old_img_h = img.shape[2]
+ old_img_w = img.shape[3]
+
+ # Inference
+ t1 = time_synchronized()
+ with torch.no_grad(): # Calculating gradients would cause a GPU memory leak
+ pred = model(img)[0]
+ t2 = time_synchronized()
+
+ # Apply NMS
+ pred = non_max_suppression(pred, conf_thres, iou_thres)
+ t3 = time_synchronized()
+
+ # Process detections
+ current_frame_potholes = 0
+ for i, det in enumerate(pred): # detections per image
+
+ if webcam: # batch_size >= 1
+ p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.count
+ else:
+ p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)
+
+ im0 = cv2.resize(im0, (640, 480))
+
+ gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
+
+ # Print results
+ for c in det[:, -1].unique():
+ n = (det[:, -1] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ label = f'{names[int(cls)]} {conf:.2f}'
+ print(xyxy)
+ pot_holes += 1
+ current_frame_potholes += 1
+ mul = (int(xyxy[2])*int(xyxy[3]))
+ print("sumx", mul)
+ if mul <= 40000:
+ plot_one_box(xyxy, im0, label=label, color=colors[0], line_thickness=1)
+ low += 1
+ elif mul > 40000 and mul < 70000:
+ plot_one_box(xyxy, im0, label=label, color=colors[1], line_thickness=1)
+ medium += 1
+ else:
+ plot_one_box(xyxy, im0, label=label, color=colors[2], line_thickness=1)
+ high += 1
+
+
+
+
+
+ (H, W) = im0.shape[:2]
+
+ print(H, W)
+
+ cv2.putText(im0, "Neom (PotHoles Detection System)", (110, 40),
+ font, 0.7 * 1, (255, 255, 255), 2)
+ cv2.rectangle(im0, (20, 50), (W - 20, 15), (255, 255, 255), 2)
+
+ cv2.putText(im0, "RISK ANALYSIS", (30, 85),
+ font, 0.4 * 1, (255, 255, 255), 1)
+ cv2.putText(im0, "-- GREEN : SAFE", (H-20, 85),
+ font, 0.4 * 1, (0, 255, 0), 1)
+ cv2.putText(im0, "-- YELLOW : Drive Slowly ", (H - 200, 85),
+ font, 0.4 * 1, (0, 255, 255), 1)
+ cv2.putText(im0, "-- RED: UNSAFE", (H-320, 85),
+ font, 0.4 * 1, (0, 0, 255), 1)
+
+ tot_str = "Total Potholes Detected: " + str(pot_holes)
+ high_str = "Risky Potholes Detected: " + str(high)
+ med_str = "Unsafe Pothole Detected: " + str(medium)
+ safe_str = "Safe Pothole Detected: " + str(low)
+
+
+ sub_img = im0[H - 100: H, 0:260]
+ black_rect = np.ones(sub_img.shape, dtype=np.uint8) * 0
+
+ res = cv2.addWeighted(sub_img, 0.8, black_rect, 0.2, 1.0)
+
+ im0[H - 100:H + 40, 0:260] = res
+
+
+ cv2.putText(im0, tot_str, (10, H - 80),
+ font, 0.5 * 1, (255, 255, 255), 1)
+ cv2.putText(im0, high_str, (10, H - 55),
+ font, 0.5 * 1, (0, 255, 0), 1)
+ cv2.putText(im0, med_str, (10, H - 30),
+ font, 0.5 * 1, (0, 120, 255), 1)
+ cv2.putText(im0, safe_str, (10, H - 5),
+ font, 0.5 * 1, (0, 0, 150), 1)
+
+ cv2.putText(im0, str("CURRENT FRAME: " + str(current_frame_potholes)), (W - 225, H - 35),
+ font, 0.7 * 1, (0, 0, 255), 2)
+
+ now = datetime.now()
+
+ timex = str(now.strftime("%d/%m/%Y %H:%M:%S"))
+ cv2.putText(im0, timex, (W - 200, H - 10),
+ font, 0.5 * 1, (255, 255, 255), 1)
+
+ cv2.namedWindow("Output", cv2.WINDOW_NORMAL)
+ cv2.setWindowProperty("Output", cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN)
+ cv2.imshow("Output", im0)
+
+ if (cv2.waitKey(1) & 0xFF == ord('q')):
+ break
+
+ cv2.destroyAllWindows()
+
+# if __name__ == '__main__':
+# with torch.no_grad():
+# AI_POTHOLES_DETECTION("../TEST_VIDEO/potholes.mp4")
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/ENGINES/models/__init__.py b/oneAPI_ODAV_APP/ENGINES/models/__init__.py
new file mode 100644
index 000000000..a6131c10e
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/models/__init__.py
@@ -0,0 +1 @@
+# init
diff --git a/oneAPI_ODAV_APP/ENGINES/models/common.py b/oneAPI_ODAV_APP/ENGINES/models/common.py
new file mode 100644
index 000000000..015cc788a
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/models/common.py
@@ -0,0 +1,2020 @@
+import math
+from copy import copy
+from pathlib import Path
+
+
+import numpy as np
+import pandas as pd
+import requests
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+from torchvision.ops import DeformConv2d
+from PIL import Image
+from torch.cuda import amp
+
+from utils.datasets import letterbox
+from utils.general import non_max_suppression, make_divisible, scale_coords, increment_path, xyxy2xywh
+from utils.plots import color_list, plot_one_box
+from utils.torch_utils import time_synchronized
+
+
+##### basic ####
+
+def autopad(k, p=None): # kernel, padding
+ # Pad to 'same'
+ if p is None:
+ p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
+ return p
+
+
+class MP(nn.Module):
+ def __init__(self, k=2):
+ super(MP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class SP(nn.Module):
+ def __init__(self, k=3, s=1):
+ super(SP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=s, padding=k // 2)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class ReOrg(nn.Module):
+ def __init__(self):
+ super(ReOrg, self).__init__()
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1)
+
+
+class Concat(nn.Module):
+ def __init__(self, dimension=1):
+ super(Concat, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return torch.cat(x, self.d)
+
+
+class Chuncat(nn.Module):
+ def __init__(self, dimension=1):
+ super(Chuncat, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ x1 = []
+ x2 = []
+ for xi in x:
+ xi1, xi2 = xi.chunk(2, self.d)
+ x1.append(xi1)
+ x2.append(xi2)
+ return torch.cat(x1+x2, self.d)
+
+
+class Shortcut(nn.Module):
+ def __init__(self, dimension=0):
+ super(Shortcut, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return x[0]+x[1]
+
+
+class Foldcut(nn.Module):
+ def __init__(self, dimension=0):
+ super(Foldcut, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ x1, x2 = x.chunk(2, self.d)
+ return x1+x2
+
+
+class Conv(nn.Module):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Conv, self).__init__()
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ def forward(self, x):
+ return self.act(self.bn(self.conv(x)))
+
+ def fuseforward(self, x):
+ return self.act(self.conv(x))
+
+
+class RobustConv(nn.Module):
+ # Robust convolution (use high kernel size 7-11 for: downsampling and other layers). Train for 300 - 450 epochs.
+ def __init__(self, c1, c2, k=7, s=1, p=None, g=1, act=True, layer_scale_init_value=1e-6): # ch_in, ch_out, kernel, stride, padding, groups
+ super(RobustConv, self).__init__()
+ self.conv_dw = Conv(c1, c1, k=k, s=s, p=p, g=c1, act=act)
+ self.conv1x1 = nn.Conv2d(c1, c2, 1, 1, 0, groups=1, bias=True)
+ self.gamma = nn.Parameter(layer_scale_init_value * torch.ones(c2)) if layer_scale_init_value > 0 else None
+
+ def forward(self, x):
+ x = x.to(memory_format=torch.channels_last)
+ x = self.conv1x1(self.conv_dw(x))
+ if self.gamma is not None:
+ x = x.mul(self.gamma.reshape(1, -1, 1, 1))
+ return x
+
+
+class RobustConv2(nn.Module):
+ # Robust convolution 2 (use [32, 5, 2] or [32, 7, 4] or [32, 11, 8] for one of the paths in CSP).
+ def __init__(self, c1, c2, k=7, s=4, p=None, g=1, act=True, layer_scale_init_value=1e-6): # ch_in, ch_out, kernel, stride, padding, groups
+ super(RobustConv2, self).__init__()
+ self.conv_strided = Conv(c1, c1, k=k, s=s, p=p, g=c1, act=act)
+ self.conv_deconv = nn.ConvTranspose2d(in_channels=c1, out_channels=c2, kernel_size=s, stride=s,
+ padding=0, bias=True, dilation=1, groups=1
+ )
+ self.gamma = nn.Parameter(layer_scale_init_value * torch.ones(c2)) if layer_scale_init_value > 0 else None
+
+ def forward(self, x):
+ x = self.conv_deconv(self.conv_strided(x))
+ if self.gamma is not None:
+ x = x.mul(self.gamma.reshape(1, -1, 1, 1))
+ return x
+
+
+def DWConv(c1, c2, k=1, s=1, act=True):
+ # Depthwise convolution
+ return Conv(c1, c2, k, s, g=math.gcd(c1, c2), act=act)
+
+
+class GhostConv(nn.Module):
+ # Ghost Convolution https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
+ super(GhostConv, self).__init__()
+ c_ = c2 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, k, s, None, g, act)
+ self.cv2 = Conv(c_, c_, 5, 1, None, c_, act)
+
+ def forward(self, x):
+ y = self.cv1(x)
+ return torch.cat([y, self.cv2(y)], 1)
+
+
+class Stem(nn.Module):
+ # Stem
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Stem, self).__init__()
+ c_ = int(c2/2) # hidden channels
+ self.cv1 = Conv(c1, c_, 3, 2)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 2)
+ self.pool = torch.nn.MaxPool2d(2, stride=2)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ return self.cv4(torch.cat((self.cv3(self.cv2(x)), self.pool(x)), dim=1))
+
+
+class DownC(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, n=1, k=2):
+ super(DownC, self).__init__()
+ c_ = int(c1) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2//2, 3, k)
+ self.cv3 = Conv(c1, c2//2, 1, 1)
+ self.mp = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return torch.cat((self.cv2(self.cv1(x)), self.cv3(self.mp(x))), dim=1)
+
+
+class SPP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, k=(5, 9, 13)):
+ super(SPP, self).__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+
+ def forward(self, x):
+ x = self.cv1(x)
+ return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))
+
+
+class Bottleneck(nn.Module):
+ # Darknet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super(Bottleneck, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2, 3, 1, g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class Res(nn.Module):
+ # ResNet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super(Res, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 3, 1, g=g)
+ self.cv3 = Conv(c_, c2, 1, 1)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv3(self.cv2(self.cv1(x))) if self.add else self.cv3(self.cv2(self.cv1(x)))
+
+
+class ResX(Res):
+ # ResNet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=32, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+
+
+class Ghost(nn.Module):
+ # Ghost Bottleneck https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride
+ super(Ghost, self).__init__()
+ c_ = c2 // 2
+ self.conv = nn.Sequential(GhostConv(c1, c_, 1, 1), # pw
+ DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw
+ GhostConv(c_, c2, 1, 1, act=False)) # pw-linear
+ self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False),
+ Conv(c1, c2, 1, 1, act=False)) if s == 2 else nn.Identity()
+
+ def forward(self, x):
+ return self.conv(x) + self.shortcut(x)
+
+##### end of basic #####
+
+
+##### cspnet #####
+
+class SPPCSPC(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super(SPPCSPC, self).__init__()
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 1)
+ self.cv4 = Conv(c_, c_, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+ self.cv5 = Conv(4 * c_, c_, 1, 1)
+ self.cv6 = Conv(c_, c_, 3, 1)
+ self.cv7 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x1 = self.cv4(self.cv3(self.cv1(x)))
+ y1 = self.cv6(self.cv5(torch.cat([x1] + [m(x1) for m in self.m], 1)))
+ y2 = self.cv2(x)
+ return self.cv7(torch.cat((y1, y2), dim=1))
+
+class GhostSPPCSPC(SPPCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super().__init__(c1, c2, n, shortcut, g, e, k)
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = GhostConv(c1, c_, 1, 1)
+ self.cv2 = GhostConv(c1, c_, 1, 1)
+ self.cv3 = GhostConv(c_, c_, 3, 1)
+ self.cv4 = GhostConv(c_, c_, 1, 1)
+ self.cv5 = GhostConv(4 * c_, c_, 1, 1)
+ self.cv6 = GhostConv(c_, c_, 3, 1)
+ self.cv7 = GhostConv(2 * c_, c2, 1, 1)
+
+
+class GhostStem(Stem):
+ # Stem
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__(c1, c2, k, s, p, g, act)
+ c_ = int(c2/2) # hidden channels
+ self.cv1 = GhostConv(c1, c_, 3, 2)
+ self.cv2 = GhostConv(c_, c_, 1, 1)
+ self.cv3 = GhostConv(c_, c_, 3, 2)
+ self.cv4 = GhostConv(2 * c_, c2, 1, 1)
+
+
+class BottleneckCSPA(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class BottleneckCSPB(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class BottleneckCSPC(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+
+class ResCSPA(BottleneckCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResCSPB(BottleneckCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResCSPC(BottleneckCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResXCSPA(ResCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class ResXCSPB(ResCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class ResXCSPC(ResCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class GhostCSPA(BottleneckCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+
+class GhostCSPB(BottleneckCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+
+class GhostCSPC(BottleneckCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+##### end of cspnet #####
+
+
+##### yolor #####
+
+class ImplicitA(nn.Module):
+ def __init__(self, channel, mean=0., std=.02):
+ super(ImplicitA, self).__init__()
+ self.channel = channel
+ self.mean = mean
+ self.std = std
+ self.implicit = nn.Parameter(torch.zeros(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=self.mean, std=self.std)
+
+ def forward(self, x):
+ return self.implicit + x
+
+
+class ImplicitM(nn.Module):
+ def __init__(self, channel, mean=1., std=.02):
+ super(ImplicitM, self).__init__()
+ self.channel = channel
+ self.mean = mean
+ self.std = std
+ self.implicit = nn.Parameter(torch.ones(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=self.mean, std=self.std)
+
+ def forward(self, x):
+ return self.implicit * x
+
+##### end of yolor #####
+
+
+##### repvgg #####
+
+class RepConv(nn.Module):
+ # Represented convolution
+ # https://arxiv.org/abs/2101.03697
+
+ def __init__(self, c1, c2, k=3, s=1, p=None, g=1, act=True, deploy=False):
+ super(RepConv, self).__init__()
+
+ self.deploy = deploy
+ self.groups = g
+ self.in_channels = c1
+ self.out_channels = c2
+
+ assert k == 3
+ assert autopad(k, p) == 1
+
+ padding_11 = autopad(k, p) - k // 2
+
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ if deploy:
+ self.rbr_reparam = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=True)
+
+ else:
+ self.rbr_identity = (nn.BatchNorm2d(num_features=c1) if c2 == c1 and s == 1 else None)
+
+ self.rbr_dense = nn.Sequential(
+ nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False),
+ nn.BatchNorm2d(num_features=c2),
+ )
+
+ self.rbr_1x1 = nn.Sequential(
+ nn.Conv2d( c1, c2, 1, s, padding_11, groups=g, bias=False),
+ nn.BatchNorm2d(num_features=c2),
+ )
+
+ def forward(self, inputs):
+ if hasattr(self, "rbr_reparam"):
+ return self.act(self.rbr_reparam(inputs))
+
+ if self.rbr_identity is None:
+ id_out = 0
+ else:
+ id_out = self.rbr_identity(inputs)
+
+ return self.act(self.rbr_dense(inputs) + self.rbr_1x1(inputs) + id_out)
+
+ def get_equivalent_kernel_bias(self):
+ kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense)
+ kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1)
+ kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity)
+ return (
+ kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1) + kernelid,
+ bias3x3 + bias1x1 + biasid,
+ )
+
+ def _pad_1x1_to_3x3_tensor(self, kernel1x1):
+ if kernel1x1 is None:
+ return 0
+ else:
+ return nn.functional.pad(kernel1x1, [1, 1, 1, 1])
+
+ def _fuse_bn_tensor(self, branch):
+ if branch is None:
+ return 0, 0
+ if isinstance(branch, nn.Sequential):
+ kernel = branch[0].weight
+ running_mean = branch[1].running_mean
+ running_var = branch[1].running_var
+ gamma = branch[1].weight
+ beta = branch[1].bias
+ eps = branch[1].eps
+ else:
+ assert isinstance(branch, nn.BatchNorm2d)
+ if not hasattr(self, "id_tensor"):
+ input_dim = self.in_channels // self.groups
+ kernel_value = np.zeros(
+ (self.in_channels, input_dim, 3, 3), dtype=np.float32
+ )
+ for i in range(self.in_channels):
+ kernel_value[i, i % input_dim, 1, 1] = 1
+ self.id_tensor = torch.from_numpy(kernel_value).to(branch.weight.device)
+ kernel = self.id_tensor
+ running_mean = branch.running_mean
+ running_var = branch.running_var
+ gamma = branch.weight
+ beta = branch.bias
+ eps = branch.eps
+ std = (running_var + eps).sqrt()
+ t = (gamma / std).reshape(-1, 1, 1, 1)
+ return kernel * t, beta - running_mean * gamma / std
+
+ def repvgg_convert(self):
+ kernel, bias = self.get_equivalent_kernel_bias()
+ return (
+ kernel.detach().cpu().numpy(),
+ bias.detach().cpu().numpy(),
+ )
+
+ def fuse_conv_bn(self, conv, bn):
+
+ std = (bn.running_var + bn.eps).sqrt()
+ bias = bn.bias - bn.running_mean * bn.weight / std
+
+ t = (bn.weight / std).reshape(-1, 1, 1, 1)
+ weights = conv.weight * t
+
+ bn = nn.Identity()
+ conv = nn.Conv2d(in_channels = conv.in_channels,
+ out_channels = conv.out_channels,
+ kernel_size = conv.kernel_size,
+ stride=conv.stride,
+ padding = conv.padding,
+ dilation = conv.dilation,
+ groups = conv.groups,
+ bias = True,
+ padding_mode = conv.padding_mode)
+
+ conv.weight = torch.nn.Parameter(weights)
+ conv.bias = torch.nn.Parameter(bias)
+ return conv
+
+ def fuse_repvgg_block(self):
+ if self.deploy:
+ return
+ print(f"RepConv.fuse_repvgg_block")
+
+ self.rbr_dense = self.fuse_conv_bn(self.rbr_dense[0], self.rbr_dense[1])
+
+ self.rbr_1x1 = self.fuse_conv_bn(self.rbr_1x1[0], self.rbr_1x1[1])
+ rbr_1x1_bias = self.rbr_1x1.bias
+ weight_1x1_expanded = torch.nn.functional.pad(self.rbr_1x1.weight, [1, 1, 1, 1])
+
+ # Fuse self.rbr_identity
+ if (isinstance(self.rbr_identity, nn.BatchNorm2d) or isinstance(self.rbr_identity, nn.modules.batchnorm.SyncBatchNorm)):
+ # print(f"fuse: rbr_identity == BatchNorm2d or SyncBatchNorm")
+ identity_conv_1x1 = nn.Conv2d(
+ in_channels=self.in_channels,
+ out_channels=self.out_channels,
+ kernel_size=1,
+ stride=1,
+ padding=0,
+ groups=self.groups,
+ bias=False)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.to(self.rbr_1x1.weight.data.device)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.squeeze().squeeze()
+ # print(f" identity_conv_1x1.weight = {identity_conv_1x1.weight.shape}")
+ identity_conv_1x1.weight.data.fill_(0.0)
+ identity_conv_1x1.weight.data.fill_diagonal_(1.0)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.unsqueeze(2).unsqueeze(3)
+ # print(f" identity_conv_1x1.weight = {identity_conv_1x1.weight.shape}")
+
+ identity_conv_1x1 = self.fuse_conv_bn(identity_conv_1x1, self.rbr_identity)
+ bias_identity_expanded = identity_conv_1x1.bias
+ weight_identity_expanded = torch.nn.functional.pad(identity_conv_1x1.weight, [1, 1, 1, 1])
+ else:
+ # print(f"fuse: rbr_identity != BatchNorm2d, rbr_identity = {self.rbr_identity}")
+ bias_identity_expanded = torch.nn.Parameter( torch.zeros_like(rbr_1x1_bias) )
+ weight_identity_expanded = torch.nn.Parameter( torch.zeros_like(weight_1x1_expanded) )
+
+
+ #print(f"self.rbr_1x1.weight = {self.rbr_1x1.weight.shape}, ")
+ #print(f"weight_1x1_expanded = {weight_1x1_expanded.shape}, ")
+ #print(f"self.rbr_dense.weight = {self.rbr_dense.weight.shape}, ")
+
+ self.rbr_dense.weight = torch.nn.Parameter(self.rbr_dense.weight + weight_1x1_expanded + weight_identity_expanded)
+ self.rbr_dense.bias = torch.nn.Parameter(self.rbr_dense.bias + rbr_1x1_bias + bias_identity_expanded)
+
+ self.rbr_reparam = self.rbr_dense
+ self.deploy = True
+
+ if self.rbr_identity is not None:
+ del self.rbr_identity
+ self.rbr_identity = None
+
+ if self.rbr_1x1 is not None:
+ del self.rbr_1x1
+ self.rbr_1x1 = None
+
+ if self.rbr_dense is not None:
+ del self.rbr_dense
+ self.rbr_dense = None
+
+
+class RepBottleneck(Bottleneck):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut=True, g=1, e=0.5)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c2, 3, 1, g=g)
+
+
+class RepBottleneckCSPA(BottleneckCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepBottleneckCSPB(BottleneckCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepBottleneckCSPC(BottleneckCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepRes(Res):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c_, 3, 1, g=g)
+
+
+class RepResCSPA(ResCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResCSPB(ResCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResCSPC(ResCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResX(ResX):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=32, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c_, 3, 1, g=g)
+
+
+class RepResXCSPA(ResXCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResXCSPB(ResXCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResXCSPC(ResXCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+##### end of repvgg #####
+
+
+##### transformer #####
+
+class TransformerLayer(nn.Module):
+ # Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance)
+ def __init__(self, c, num_heads):
+ super().__init__()
+ self.q = nn.Linear(c, c, bias=False)
+ self.k = nn.Linear(c, c, bias=False)
+ self.v = nn.Linear(c, c, bias=False)
+ self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads)
+ self.fc1 = nn.Linear(c, c, bias=False)
+ self.fc2 = nn.Linear(c, c, bias=False)
+
+ def forward(self, x):
+ x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x
+ x = self.fc2(self.fc1(x)) + x
+ return x
+
+
+class TransformerBlock(nn.Module):
+ # Vision Transformer https://arxiv.org/abs/2010.11929
+ def __init__(self, c1, c2, num_heads, num_layers):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+ self.linear = nn.Linear(c2, c2) # learnable position embedding
+ self.tr = nn.Sequential(*[TransformerLayer(c2, num_heads) for _ in range(num_layers)])
+ self.c2 = c2
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ b, _, w, h = x.shape
+ p = x.flatten(2)
+ p = p.unsqueeze(0)
+ p = p.transpose(0, 3)
+ p = p.squeeze(3)
+ e = self.linear(p)
+ x = p + e
+
+ x = self.tr(x)
+ x = x.unsqueeze(3)
+ x = x.transpose(0, 3)
+ x = x.reshape(b, self.c2, w, h)
+ return x
+
+##### end of transformer #####
+
+
+##### yolov5 #####
+
+class Focus(nn.Module):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Focus, self).__init__()
+ self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
+ # self.contract = Contract(gain=2)
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
+ # return self.conv(self.contract(x))
+
+
+class SPPF(nn.Module):
+ # Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
+ def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * 4, c2, 1, 1)
+ self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(torch.cat([x, y1, y2, self.m(y2)], 1))
+
+
+class Contract(nn.Module):
+ # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ N, C, H, W = x.size() # assert (H / s == 0) and (W / s == 0), 'Indivisible gain'
+ s = self.gain
+ x = x.view(N, C, H // s, s, W // s, s) # x(1,64,40,2,40,2)
+ x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
+ return x.view(N, C * s * s, H // s, W // s) # x(1,256,40,40)
+
+
+class Expand(nn.Module):
+ # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ N, C, H, W = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
+ s = self.gain
+ x = x.view(N, s, s, C // s ** 2, H, W) # x(1,2,2,16,80,80)
+ x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
+ return x.view(N, C // s ** 2, H * s, W * s) # x(1,16,160,160)
+
+
+class NMS(nn.Module):
+ # Non-Maximum Suppression (NMS) module
+ conf = 0.25 # confidence threshold
+ iou = 0.45 # IoU threshold
+ classes = None # (optional list) filter by class
+
+ def __init__(self):
+ super(NMS, self).__init__()
+
+ def forward(self, x):
+ return non_max_suppression(x[0], conf_thres=self.conf, iou_thres=self.iou, classes=self.classes)
+
+
+class autoShape(nn.Module):
+ # input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS
+ conf = 0.25 # NMS confidence threshold
+ iou = 0.45 # NMS IoU threshold
+ classes = None # (optional list) filter by class
+
+ def __init__(self, model):
+ super(autoShape, self).__init__()
+ self.model = model.eval()
+
+ def autoshape(self):
+ print('autoShape already enabled, skipping... ') # model already converted to model.autoshape()
+ return self
+
+ @torch.no_grad()
+ def forward(self, imgs, size=640, augment=False, profile=False):
+ # Inference from various sources. For height=640, width=1280, RGB images example inputs are:
+ # filename: imgs = 'data/samples/zidane.jpg'
+ # URI: = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/zidane.jpg'
+ # OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3)
+ # PIL: = Image.open('image.jpg') # HWC x(640,1280,3)
+ # numpy: = np.zeros((640,1280,3)) # HWC
+ # torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values)
+ # multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images
+
+ t = [time_synchronized()]
+ p = next(self.model.parameters()) # for device and type
+ if isinstance(imgs, torch.Tensor): # torch
+ with amp.autocast(enabled=p.device.type != 'cpu'):
+ return self.model(imgs.to(p.device).type_as(p), augment, profile) # inference
+
+ # Pre-process
+ n, imgs = (len(imgs), imgs) if isinstance(imgs, list) else (1, [imgs]) # number of images, list of images
+ shape0, shape1, files = [], [], [] # image and inference shapes, filenames
+ for i, im in enumerate(imgs):
+ f = f'image{i}' # filename
+ if isinstance(im, str): # filename or uri
+ im, f = np.asarray(Image.open(requests.get(im, stream=True).raw if im.startswith('http') else im)), im
+ elif isinstance(im, Image.Image): # PIL Image
+ im, f = np.asarray(im), getattr(im, 'filename', f) or f
+ files.append(Path(f).with_suffix('.jpg').name)
+ if im.shape[0] < 5: # image in CHW
+ im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1)
+ im = im[:, :, :3] if im.ndim == 3 else np.tile(im[:, :, None], 3) # enforce 3ch input
+ s = im.shape[:2] # HWC
+ shape0.append(s) # image shape
+ g = (size / max(s)) # gain
+ shape1.append([y * g for y in s])
+ imgs[i] = im # update
+ shape1 = [make_divisible(x, int(self.stride.max())) for x in np.stack(shape1, 0).max(0)] # inference shape
+ x = [letterbox(im, new_shape=shape1, auto=False)[0] for im in imgs] # pad
+ x = np.stack(x, 0) if n > 1 else x[0][None] # stack
+ x = np.ascontiguousarray(x.transpose((0, 3, 1, 2))) # BHWC to BCHW
+ x = torch.from_numpy(x).to(p.device).type_as(p) / 255. # uint8 to fp16/32
+ t.append(time_synchronized())
+
+ with amp.autocast(enabled=p.device.type != 'cpu'):
+ # Inference
+ y = self.model(x, augment, profile)[0] # forward
+ t.append(time_synchronized())
+
+ # Post-process
+ y = non_max_suppression(y, conf_thres=self.conf, iou_thres=self.iou, classes=self.classes) # NMS
+ for i in range(n):
+ scale_coords(shape1, y[i][:, :4], shape0[i])
+
+ t.append(time_synchronized())
+ return Detections(imgs, y, files, t, self.names, x.shape)
+
+
+class Detections:
+ # detections class for YOLOv5 inference results
+ def __init__(self, imgs, pred, files, times=None, names=None, shape=None):
+ super(Detections, self).__init__()
+ d = pred[0].device # device
+ gn = [torch.tensor([*[im.shape[i] for i in [1, 0, 1, 0]], 1., 1.], device=d) for im in imgs] # normalizations
+ self.imgs = imgs # list of images as numpy arrays
+ self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls)
+ self.names = names # class names
+ self.files = files # image filenames
+ self.xyxy = pred # xyxy pixels
+ self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels
+ self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized
+ self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized
+ self.n = len(self.pred) # number of images (batch size)
+ self.t = tuple((times[i + 1] - times[i]) * 1000 / self.n for i in range(3)) # timestamps (ms)
+ self.s = shape # inference BCHW shape
+
+ def display(self, pprint=False, show=False, save=False, render=False, save_dir=''):
+ colors = color_list()
+ for i, (img, pred) in enumerate(zip(self.imgs, self.pred)):
+ str = f'image {i + 1}/{len(self.pred)}: {img.shape[0]}x{img.shape[1]} '
+ if pred is not None:
+ for c in pred[:, -1].unique():
+ n = (pred[:, -1] == c).sum() # detections per class
+ str += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string
+ if show or save or render:
+ for *box, conf, cls in pred: # xyxy, confidence, class
+ label = f'{self.names[int(cls)]} {conf:.2f}'
+ plot_one_box(box, img, label=label, color=colors[int(cls) % 10])
+ img = Image.fromarray(img.astype(np.uint8)) if isinstance(img, np.ndarray) else img # from np
+ if pprint:
+ print(str.rstrip(', '))
+ if show:
+ img.show(self.files[i]) # show
+ if save:
+ f = self.files[i]
+ img.save(Path(save_dir) / f) # save
+ print(f"{'Saved' * (i == 0)} {f}", end=',' if i < self.n - 1 else f' to {save_dir}\n')
+ if render:
+ self.imgs[i] = np.asarray(img)
+
+ def print(self):
+ self.display(pprint=True) # print results
+ print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {tuple(self.s)}' % self.t)
+
+ def show(self):
+ self.display(show=True) # show results
+
+ def save(self, save_dir='runs/hub/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/hub/exp') # increment save_dir
+ Path(save_dir).mkdir(parents=True, exist_ok=True)
+ self.display(save=True, save_dir=save_dir) # save results
+
+ def render(self):
+ self.display(render=True) # render results
+ return self.imgs
+
+ def pandas(self):
+ # return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0])
+ new = copy(self) # return copy
+ ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns
+ cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns
+ for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]):
+ a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update
+ setattr(new, k, [pd.DataFrame(x, columns=c) for x in a])
+ return new
+
+ def tolist(self):
+ # return a list of Detections objects, i.e. 'for result in results.tolist():'
+ x = [Detections([self.imgs[i]], [self.pred[i]], self.names, self.s) for i in range(self.n)]
+ for d in x:
+ for k in ['imgs', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']:
+ setattr(d, k, getattr(d, k)[0]) # pop out of list
+ return x
+
+ def __len__(self):
+ return self.n
+
+
+class Classify(nn.Module):
+ # Classification head, i.e. x(b,c1,20,20) to x(b,c2)
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Classify, self).__init__()
+ self.aap = nn.AdaptiveAvgPool2d(1) # to x(b,c1,1,1)
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g) # to x(b,c2,1,1)
+ self.flat = nn.Flatten()
+
+ def forward(self, x):
+ z = torch.cat([self.aap(y) for y in (x if isinstance(x, list) else [x])], 1) # cat if list
+ return self.flat(self.conv(z)) # flatten to x(b,c2)
+
+##### end of yolov5 ######
+
+
+##### orepa #####
+
+def transI_fusebn(kernel, bn):
+ gamma = bn.weight
+ std = (bn.running_var + bn.eps).sqrt()
+ return kernel * ((gamma / std).reshape(-1, 1, 1, 1)), bn.bias - bn.running_mean * gamma / std
+
+
+class ConvBN(nn.Module):
+ def __init__(self, in_channels, out_channels, kernel_size,
+ stride=1, padding=0, dilation=1, groups=1, deploy=False, nonlinear=None):
+ super().__init__()
+ if nonlinear is None:
+ self.nonlinear = nn.Identity()
+ else:
+ self.nonlinear = nonlinear
+ if deploy:
+ self.conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
+ stride=stride, padding=padding, dilation=dilation, groups=groups, bias=True)
+ else:
+ self.conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
+ stride=stride, padding=padding, dilation=dilation, groups=groups, bias=False)
+ self.bn = nn.BatchNorm2d(num_features=out_channels)
+
+ def forward(self, x):
+ if hasattr(self, 'bn'):
+ return self.nonlinear(self.bn(self.conv(x)))
+ else:
+ return self.nonlinear(self.conv(x))
+
+ def switch_to_deploy(self):
+ kernel, bias = transI_fusebn(self.conv.weight, self.bn)
+ conv = nn.Conv2d(in_channels=self.conv.in_channels, out_channels=self.conv.out_channels, kernel_size=self.conv.kernel_size,
+ stride=self.conv.stride, padding=self.conv.padding, dilation=self.conv.dilation, groups=self.conv.groups, bias=True)
+ conv.weight.data = kernel
+ conv.bias.data = bias
+ for para in self.parameters():
+ para.detach_()
+ self.__delattr__('conv')
+ self.__delattr__('bn')
+ self.conv = conv
+
+class OREPA_3x3_RepConv(nn.Module):
+
+ def __init__(self, in_channels, out_channels, kernel_size,
+ stride=1, padding=0, dilation=1, groups=1,
+ internal_channels_1x1_3x3=None,
+ deploy=False, nonlinear=None, single_init=False):
+ super(OREPA_3x3_RepConv, self).__init__()
+ self.deploy = deploy
+
+ if nonlinear is None:
+ self.nonlinear = nn.Identity()
+ else:
+ self.nonlinear = nonlinear
+
+ self.kernel_size = kernel_size
+ self.in_channels = in_channels
+ self.out_channels = out_channels
+ self.groups = groups
+ assert padding == kernel_size // 2
+
+ self.stride = stride
+ self.padding = padding
+ self.dilation = dilation
+
+ self.branch_counter = 0
+
+ self.weight_rbr_origin = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), kernel_size, kernel_size))
+ nn.init.kaiming_uniform_(self.weight_rbr_origin, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+
+ if groups < out_channels:
+ self.weight_rbr_avg_conv = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), 1, 1))
+ self.weight_rbr_pfir_conv = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_avg_conv, a=1.0)
+ nn.init.kaiming_uniform_(self.weight_rbr_pfir_conv, a=1.0)
+ self.weight_rbr_avg_conv.data
+ self.weight_rbr_pfir_conv.data
+ self.register_buffer('weight_rbr_avg_avg', torch.ones(kernel_size, kernel_size).mul(1.0/kernel_size/kernel_size))
+ self.branch_counter += 1
+
+ else:
+ raise NotImplementedError
+ self.branch_counter += 1
+
+ if internal_channels_1x1_3x3 is None:
+ internal_channels_1x1_3x3 = in_channels if groups < out_channels else 2 * in_channels # For mobilenet, it is better to have 2X internal channels
+
+ if internal_channels_1x1_3x3 == in_channels:
+ self.weight_rbr_1x1_kxk_idconv1 = nn.Parameter(torch.zeros(in_channels, int(in_channels/self.groups), 1, 1))
+ id_value = np.zeros((in_channels, int(in_channels/self.groups), 1, 1))
+ for i in range(in_channels):
+ id_value[i, i % int(in_channels/self.groups), 0, 0] = 1
+ id_tensor = torch.from_numpy(id_value).type_as(self.weight_rbr_1x1_kxk_idconv1)
+ self.register_buffer('id_tensor', id_tensor)
+
+ else:
+ self.weight_rbr_1x1_kxk_conv1 = nn.Parameter(torch.Tensor(internal_channels_1x1_3x3, int(in_channels/self.groups), 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_1x1_kxk_conv1, a=math.sqrt(1.0))
+ self.weight_rbr_1x1_kxk_conv2 = nn.Parameter(torch.Tensor(out_channels, int(internal_channels_1x1_3x3/self.groups), kernel_size, kernel_size))
+ nn.init.kaiming_uniform_(self.weight_rbr_1x1_kxk_conv2, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+ expand_ratio = 8
+ self.weight_rbr_gconv_dw = nn.Parameter(torch.Tensor(in_channels*expand_ratio, 1, kernel_size, kernel_size))
+ self.weight_rbr_gconv_pw = nn.Parameter(torch.Tensor(out_channels, in_channels*expand_ratio, 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_gconv_dw, a=math.sqrt(1.0))
+ nn.init.kaiming_uniform_(self.weight_rbr_gconv_pw, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+ if out_channels == in_channels and stride == 1:
+ self.branch_counter += 1
+
+ self.vector = nn.Parameter(torch.Tensor(self.branch_counter, self.out_channels))
+ self.bn = nn.BatchNorm2d(out_channels)
+
+ self.fre_init()
+
+ nn.init.constant_(self.vector[0, :], 0.25) #origin
+ nn.init.constant_(self.vector[1, :], 0.25) #avg
+ nn.init.constant_(self.vector[2, :], 0.0) #prior
+ nn.init.constant_(self.vector[3, :], 0.5) #1x1_kxk
+ nn.init.constant_(self.vector[4, :], 0.5) #dws_conv
+
+
+ def fre_init(self):
+ prior_tensor = torch.Tensor(self.out_channels, self.kernel_size, self.kernel_size)
+ half_fg = self.out_channels/2
+ for i in range(self.out_channels):
+ for h in range(3):
+ for w in range(3):
+ if i < half_fg:
+ prior_tensor[i, h, w] = math.cos(math.pi*(h+0.5)*(i+1)/3)
+ else:
+ prior_tensor[i, h, w] = math.cos(math.pi*(w+0.5)*(i+1-half_fg)/3)
+
+ self.register_buffer('weight_rbr_prior', prior_tensor)
+
+ def weight_gen(self):
+
+ weight_rbr_origin = torch.einsum('oihw,o->oihw', self.weight_rbr_origin, self.vector[0, :])
+
+ weight_rbr_avg = torch.einsum('oihw,o->oihw', torch.einsum('oihw,hw->oihw', self.weight_rbr_avg_conv, self.weight_rbr_avg_avg), self.vector[1, :])
+
+ weight_rbr_pfir = torch.einsum('oihw,o->oihw', torch.einsum('oihw,ohw->oihw', self.weight_rbr_pfir_conv, self.weight_rbr_prior), self.vector[2, :])
+
+ weight_rbr_1x1_kxk_conv1 = None
+ if hasattr(self, 'weight_rbr_1x1_kxk_idconv1'):
+ weight_rbr_1x1_kxk_conv1 = (self.weight_rbr_1x1_kxk_idconv1 + self.id_tensor).squeeze()
+ elif hasattr(self, 'weight_rbr_1x1_kxk_conv1'):
+ weight_rbr_1x1_kxk_conv1 = self.weight_rbr_1x1_kxk_conv1.squeeze()
+ else:
+ raise NotImplementedError
+ weight_rbr_1x1_kxk_conv2 = self.weight_rbr_1x1_kxk_conv2
+
+ if self.groups > 1:
+ g = self.groups
+ t, ig = weight_rbr_1x1_kxk_conv1.size()
+ o, tg, h, w = weight_rbr_1x1_kxk_conv2.size()
+ weight_rbr_1x1_kxk_conv1 = weight_rbr_1x1_kxk_conv1.view(g, int(t/g), ig)
+ weight_rbr_1x1_kxk_conv2 = weight_rbr_1x1_kxk_conv2.view(g, int(o/g), tg, h, w)
+ weight_rbr_1x1_kxk = torch.einsum('gti,gothw->goihw', weight_rbr_1x1_kxk_conv1, weight_rbr_1x1_kxk_conv2).view(o, ig, h, w)
+ else:
+ weight_rbr_1x1_kxk = torch.einsum('ti,othw->oihw', weight_rbr_1x1_kxk_conv1, weight_rbr_1x1_kxk_conv2)
+
+ weight_rbr_1x1_kxk = torch.einsum('oihw,o->oihw', weight_rbr_1x1_kxk, self.vector[3, :])
+
+ weight_rbr_gconv = self.dwsc2full(self.weight_rbr_gconv_dw, self.weight_rbr_gconv_pw, self.in_channels)
+ weight_rbr_gconv = torch.einsum('oihw,o->oihw', weight_rbr_gconv, self.vector[4, :])
+
+ weight = weight_rbr_origin + weight_rbr_avg + weight_rbr_1x1_kxk + weight_rbr_pfir + weight_rbr_gconv
+
+ return weight
+
+ def dwsc2full(self, weight_dw, weight_pw, groups):
+
+ t, ig, h, w = weight_dw.size()
+ o, _, _, _ = weight_pw.size()
+ tg = int(t/groups)
+ i = int(ig*groups)
+ weight_dw = weight_dw.view(groups, tg, ig, h, w)
+ weight_pw = weight_pw.squeeze().view(o, groups, tg)
+
+ weight_dsc = torch.einsum('gtihw,ogt->ogihw', weight_dw, weight_pw)
+ return weight_dsc.view(o, i, h, w)
+
+ def forward(self, inputs):
+ weight = self.weight_gen()
+ out = F.conv2d(inputs, weight, bias=None, stride=self.stride, padding=self.padding, dilation=self.dilation, groups=self.groups)
+
+ return self.nonlinear(self.bn(out))
+
+class RepConv_OREPA(nn.Module):
+
+ def __init__(self, c1, c2, k=3, s=1, padding=1, dilation=1, groups=1, padding_mode='zeros', deploy=False, use_se=False, nonlinear=nn.SiLU()):
+ super(RepConv_OREPA, self).__init__()
+ self.deploy = deploy
+ self.groups = groups
+ self.in_channels = c1
+ self.out_channels = c2
+
+ self.padding = padding
+ self.dilation = dilation
+ self.groups = groups
+
+ assert k == 3
+ assert padding == 1
+
+ padding_11 = padding - k // 2
+
+ if nonlinear is None:
+ self.nonlinearity = nn.Identity()
+ else:
+ self.nonlinearity = nonlinear
+
+ if use_se:
+ self.se = SEBlock(self.out_channels, internal_neurons=self.out_channels // 16)
+ else:
+ self.se = nn.Identity()
+
+ if deploy:
+ self.rbr_reparam = nn.Conv2d(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=k, stride=s,
+ padding=padding, dilation=dilation, groups=groups, bias=True, padding_mode=padding_mode)
+
+ else:
+ self.rbr_identity = nn.BatchNorm2d(num_features=self.in_channels) if self.out_channels == self.in_channels and s == 1 else None
+ self.rbr_dense = OREPA_3x3_RepConv(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=k, stride=s, padding=padding, groups=groups, dilation=1)
+ self.rbr_1x1 = ConvBN(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=1, stride=s, padding=padding_11, groups=groups, dilation=1)
+ print('RepVGG Block, identity = ', self.rbr_identity)
+
+
+ def forward(self, inputs):
+ if hasattr(self, 'rbr_reparam'):
+ return self.nonlinearity(self.se(self.rbr_reparam(inputs)))
+
+ if self.rbr_identity is None:
+ id_out = 0
+ else:
+ id_out = self.rbr_identity(inputs)
+
+ out1 = self.rbr_dense(inputs)
+ out2 = self.rbr_1x1(inputs)
+ out3 = id_out
+ out = out1 + out2 + out3
+
+ return self.nonlinearity(self.se(out))
+
+
+ # Optional. This improves the accuracy and facilitates quantization.
+ # 1. Cancel the original weight decay on rbr_dense.conv.weight and rbr_1x1.conv.weight.
+ # 2. Use like this.
+ # loss = criterion(....)
+ # for every RepVGGBlock blk:
+ # loss += weight_decay_coefficient * 0.5 * blk.get_cust_L2()
+ # optimizer.zero_grad()
+ # loss.backward()
+
+ # Not used for OREPA
+ def get_custom_L2(self):
+ K3 = self.rbr_dense.weight_gen()
+ K1 = self.rbr_1x1.conv.weight
+ t3 = (self.rbr_dense.bn.weight / ((self.rbr_dense.bn.running_var + self.rbr_dense.bn.eps).sqrt())).reshape(-1, 1, 1, 1).detach()
+ t1 = (self.rbr_1x1.bn.weight / ((self.rbr_1x1.bn.running_var + self.rbr_1x1.bn.eps).sqrt())).reshape(-1, 1, 1, 1).detach()
+
+ l2_loss_circle = (K3 ** 2).sum() - (K3[:, :, 1:2, 1:2] ** 2).sum() # The L2 loss of the "circle" of weights in 3x3 kernel. Use regular L2 on them.
+ eq_kernel = K3[:, :, 1:2, 1:2] * t3 + K1 * t1 # The equivalent resultant central point of 3x3 kernel.
+ l2_loss_eq_kernel = (eq_kernel ** 2 / (t3 ** 2 + t1 ** 2)).sum() # Normalize for an L2 coefficient comparable to regular L2.
+ return l2_loss_eq_kernel + l2_loss_circle
+
+ def get_equivalent_kernel_bias(self):
+ kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense)
+ kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1)
+ kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity)
+ return kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1) + kernelid, bias3x3 + bias1x1 + biasid
+
+ def _pad_1x1_to_3x3_tensor(self, kernel1x1):
+ if kernel1x1 is None:
+ return 0
+ else:
+ return torch.nn.functional.pad(kernel1x1, [1,1,1,1])
+
+ def _fuse_bn_tensor(self, branch):
+ if branch is None:
+ return 0, 0
+ if not isinstance(branch, nn.BatchNorm2d):
+ if isinstance(branch, OREPA_3x3_RepConv):
+ kernel = branch.weight_gen()
+ elif isinstance(branch, ConvBN):
+ kernel = branch.conv.weight
+ else:
+ raise NotImplementedError
+ running_mean = branch.bn.running_mean
+ running_var = branch.bn.running_var
+ gamma = branch.bn.weight
+ beta = branch.bn.bias
+ eps = branch.bn.eps
+ else:
+ if not hasattr(self, 'id_tensor'):
+ input_dim = self.in_channels // self.groups
+ kernel_value = np.zeros((self.in_channels, input_dim, 3, 3), dtype=np.float32)
+ for i in range(self.in_channels):
+ kernel_value[i, i % input_dim, 1, 1] = 1
+ self.id_tensor = torch.from_numpy(kernel_value).to(branch.weight.device)
+ kernel = self.id_tensor
+ running_mean = branch.running_mean
+ running_var = branch.running_var
+ gamma = branch.weight
+ beta = branch.bias
+ eps = branch.eps
+ std = (running_var + eps).sqrt()
+ t = (gamma / std).reshape(-1, 1, 1, 1)
+ return kernel * t, beta - running_mean * gamma / std
+
+ def switch_to_deploy(self):
+ if hasattr(self, 'rbr_reparam'):
+ return
+ print(f"RepConv_OREPA.switch_to_deploy")
+ kernel, bias = self.get_equivalent_kernel_bias()
+ self.rbr_reparam = nn.Conv2d(in_channels=self.rbr_dense.in_channels, out_channels=self.rbr_dense.out_channels,
+ kernel_size=self.rbr_dense.kernel_size, stride=self.rbr_dense.stride,
+ padding=self.rbr_dense.padding, dilation=self.rbr_dense.dilation, groups=self.rbr_dense.groups, bias=True)
+ self.rbr_reparam.weight.data = kernel
+ self.rbr_reparam.bias.data = bias
+ for para in self.parameters():
+ para.detach_()
+ self.__delattr__('rbr_dense')
+ self.__delattr__('rbr_1x1')
+ if hasattr(self, 'rbr_identity'):
+ self.__delattr__('rbr_identity')
+
+##### end of orepa #####
+
+
+##### swin transformer #####
+
+class WindowAttention(nn.Module):
+
+ def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):
+
+ super().__init__()
+ self.dim = dim
+ self.window_size = window_size # Wh, Ww
+ self.num_heads = num_heads
+ head_dim = dim // num_heads
+ self.scale = qk_scale or head_dim ** -0.5
+
+ # define a parameter table of relative position bias
+ self.relative_position_bias_table = nn.Parameter(
+ torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nH
+
+ # get pair-wise relative position index for each token inside the window
+ coords_h = torch.arange(self.window_size[0])
+ coords_w = torch.arange(self.window_size[1])
+ coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
+ coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
+ relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
+ relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
+ relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
+ relative_coords[:, :, 1] += self.window_size[1] - 1
+ relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
+ relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
+ self.register_buffer("relative_position_index", relative_position_index)
+
+ self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
+ self.attn_drop = nn.Dropout(attn_drop)
+ self.proj = nn.Linear(dim, dim)
+ self.proj_drop = nn.Dropout(proj_drop)
+
+ nn.init.normal_(self.relative_position_bias_table, std=.02)
+ self.softmax = nn.Softmax(dim=-1)
+
+ def forward(self, x, mask=None):
+
+ B_, N, C = x.shape
+ qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
+ q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
+
+ q = q * self.scale
+ attn = (q @ k.transpose(-2, -1))
+
+ relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(
+ self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
+ relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
+ attn = attn + relative_position_bias.unsqueeze(0)
+
+ if mask is not None:
+ nW = mask.shape[0]
+ attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
+ attn = attn.view(-1, self.num_heads, N, N)
+ attn = self.softmax(attn)
+ else:
+ attn = self.softmax(attn)
+
+ attn = self.attn_drop(attn)
+
+ # print(attn.dtype, v.dtype)
+ try:
+ x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
+ except:
+ #print(attn.dtype, v.dtype)
+ x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)
+ x = self.proj(x)
+ x = self.proj_drop(x)
+ return x
+
+class Mlp(nn.Module):
+
+ def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):
+ super().__init__()
+ out_features = out_features or in_features
+ hidden_features = hidden_features or in_features
+ self.fc1 = nn.Linear(in_features, hidden_features)
+ self.act = act_layer()
+ self.fc2 = nn.Linear(hidden_features, out_features)
+ self.drop = nn.Dropout(drop)
+
+ def forward(self, x):
+ x = self.fc1(x)
+ x = self.act(x)
+ x = self.drop(x)
+ x = self.fc2(x)
+ x = self.drop(x)
+ return x
+
+def window_partition(x, window_size):
+
+ B, H, W, C = x.shape
+ assert H % window_size == 0, 'feature map h and w can not divide by window size'
+ x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
+ windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
+ return windows
+
+def window_reverse(windows, window_size, H, W):
+
+ B = int(windows.shape[0] / (H * W / window_size / window_size))
+ x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
+ x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
+ return x
+
+
+class SwinTransformerLayer(nn.Module):
+
+ def __init__(self, dim, num_heads, window_size=8, shift_size=0,
+ mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0.,
+ act_layer=nn.SiLU, norm_layer=nn.LayerNorm):
+ super().__init__()
+ self.dim = dim
+ self.num_heads = num_heads
+ self.window_size = window_size
+ self.shift_size = shift_size
+ self.mlp_ratio = mlp_ratio
+ # if min(self.input_resolution) <= self.window_size:
+ # # if window size is larger than input resolution, we don't partition windows
+ # self.shift_size = 0
+ # self.window_size = min(self.input_resolution)
+ assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
+
+ self.norm1 = norm_layer(dim)
+ self.attn = WindowAttention(
+ dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,
+ qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)
+
+ self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
+ self.norm2 = norm_layer(dim)
+ mlp_hidden_dim = int(dim * mlp_ratio)
+ self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
+
+ def create_mask(self, H, W):
+ # calculate attention mask for SW-MSA
+ img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
+ h_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ w_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ cnt = 0
+ for h in h_slices:
+ for w in w_slices:
+ img_mask[:, h, w, :] = cnt
+ cnt += 1
+
+ mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
+ mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
+ attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
+ attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
+
+ return attn_mask
+
+ def forward(self, x):
+ # reshape x[b c h w] to x[b l c]
+ _, _, H_, W_ = x.shape
+
+ Padding = False
+ if min(H_, W_) < self.window_size or H_ % self.window_size!=0 or W_ % self.window_size!=0:
+ Padding = True
+ # print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')
+ pad_r = (self.window_size - W_ % self.window_size) % self.window_size
+ pad_b = (self.window_size - H_ % self.window_size) % self.window_size
+ x = F.pad(x, (0, pad_r, 0, pad_b))
+
+ # print('2', x.shape)
+ B, C, H, W = x.shape
+ L = H * W
+ x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c
+
+ # create mask from init to forward
+ if self.shift_size > 0:
+ attn_mask = self.create_mask(H, W).to(x.device)
+ else:
+ attn_mask = None
+
+ shortcut = x
+ x = self.norm1(x)
+ x = x.view(B, H, W, C)
+
+ # cyclic shift
+ if self.shift_size > 0:
+ shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
+ else:
+ shifted_x = x
+
+ # partition windows
+ x_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, C
+ x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
+
+ # W-MSA/SW-MSA
+ attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C
+
+ # merge windows
+ attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
+ shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' C
+
+ # reverse cyclic shift
+ if self.shift_size > 0:
+ x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
+ else:
+ x = shifted_x
+ x = x.view(B, H * W, C)
+
+ # FFN
+ x = shortcut + self.drop_path(x)
+ x = x + self.drop_path(self.mlp(self.norm2(x)))
+
+ x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w
+
+ if Padding:
+ x = x[:, :, :H_, :W_] # reverse padding
+
+ return x
+
+
+class SwinTransformerBlock(nn.Module):
+ def __init__(self, c1, c2, num_heads, num_layers, window_size=8):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+
+ # remove input_resolution
+ self.blocks = nn.Sequential(*[SwinTransformerLayer(dim=c2, num_heads=num_heads, window_size=window_size,
+ shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)])
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ x = self.blocks(x)
+ return x
+
+
+class STCSPA(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class STCSPB(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class STCSPC(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+##### end of swin transformer #####
+
+
+##### swin transformer v2 #####
+
+class WindowAttention_v2(nn.Module):
+
+ def __init__(self, dim, window_size, num_heads, qkv_bias=True, attn_drop=0., proj_drop=0.,
+ pretrained_window_size=[0, 0]):
+
+ super().__init__()
+ self.dim = dim
+ self.window_size = window_size # Wh, Ww
+ self.pretrained_window_size = pretrained_window_size
+ self.num_heads = num_heads
+
+ self.logit_scale = nn.Parameter(torch.log(10 * torch.ones((num_heads, 1, 1))), requires_grad=True)
+
+ # mlp to generate continuous relative position bias
+ self.cpb_mlp = nn.Sequential(nn.Linear(2, 512, bias=True),
+ nn.ReLU(inplace=True),
+ nn.Linear(512, num_heads, bias=False))
+
+ # get relative_coords_table
+ relative_coords_h = torch.arange(-(self.window_size[0] - 1), self.window_size[0], dtype=torch.float32)
+ relative_coords_w = torch.arange(-(self.window_size[1] - 1), self.window_size[1], dtype=torch.float32)
+ relative_coords_table = torch.stack(
+ torch.meshgrid([relative_coords_h,
+ relative_coords_w])).permute(1, 2, 0).contiguous().unsqueeze(0) # 1, 2*Wh-1, 2*Ww-1, 2
+ if pretrained_window_size[0] > 0:
+ relative_coords_table[:, :, :, 0] /= (pretrained_window_size[0] - 1)
+ relative_coords_table[:, :, :, 1] /= (pretrained_window_size[1] - 1)
+ else:
+ relative_coords_table[:, :, :, 0] /= (self.window_size[0] - 1)
+ relative_coords_table[:, :, :, 1] /= (self.window_size[1] - 1)
+ relative_coords_table *= 8 # normalize to -8, 8
+ relative_coords_table = torch.sign(relative_coords_table) * torch.log2(
+ torch.abs(relative_coords_table) + 1.0) / np.log2(8)
+
+ self.register_buffer("relative_coords_table", relative_coords_table)
+
+ # get pair-wise relative position index for each token inside the window
+ coords_h = torch.arange(self.window_size[0])
+ coords_w = torch.arange(self.window_size[1])
+ coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
+ coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
+ relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
+ relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
+ relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
+ relative_coords[:, :, 1] += self.window_size[1] - 1
+ relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
+ relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
+ self.register_buffer("relative_position_index", relative_position_index)
+
+ self.qkv = nn.Linear(dim, dim * 3, bias=False)
+ if qkv_bias:
+ self.q_bias = nn.Parameter(torch.zeros(dim))
+ self.v_bias = nn.Parameter(torch.zeros(dim))
+ else:
+ self.q_bias = None
+ self.v_bias = None
+ self.attn_drop = nn.Dropout(attn_drop)
+ self.proj = nn.Linear(dim, dim)
+ self.proj_drop = nn.Dropout(proj_drop)
+ self.softmax = nn.Softmax(dim=-1)
+
+ def forward(self, x, mask=None):
+
+ B_, N, C = x.shape
+ qkv_bias = None
+ if self.q_bias is not None:
+ qkv_bias = torch.cat((self.q_bias, torch.zeros_like(self.v_bias, requires_grad=False), self.v_bias))
+ qkv = F.linear(input=x, weight=self.qkv.weight, bias=qkv_bias)
+ qkv = qkv.reshape(B_, N, 3, self.num_heads, -1).permute(2, 0, 3, 1, 4)
+ q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
+
+ # cosine attention
+ attn = (F.normalize(q, dim=-1) @ F.normalize(k, dim=-1).transpose(-2, -1))
+ logit_scale = torch.clamp(self.logit_scale, max=torch.log(torch.tensor(1. / 0.01))).exp()
+ attn = attn * logit_scale
+
+ relative_position_bias_table = self.cpb_mlp(self.relative_coords_table).view(-1, self.num_heads)
+ relative_position_bias = relative_position_bias_table[self.relative_position_index.view(-1)].view(
+ self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
+ relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
+ relative_position_bias = 16 * torch.sigmoid(relative_position_bias)
+ attn = attn + relative_position_bias.unsqueeze(0)
+
+ if mask is not None:
+ nW = mask.shape[0]
+ attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
+ attn = attn.view(-1, self.num_heads, N, N)
+ attn = self.softmax(attn)
+ else:
+ attn = self.softmax(attn)
+
+ attn = self.attn_drop(attn)
+
+ try:
+ x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
+ except:
+ x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)
+
+ x = self.proj(x)
+ x = self.proj_drop(x)
+ return x
+
+ def extra_repr(self) -> str:
+ return f'dim={self.dim}, window_size={self.window_size}, ' \
+ f'pretrained_window_size={self.pretrained_window_size}, num_heads={self.num_heads}'
+
+ def flops(self, N):
+ # calculate flops for 1 window with token length of N
+ flops = 0
+ # qkv = self.qkv(x)
+ flops += N * self.dim * 3 * self.dim
+ # attn = (q @ k.transpose(-2, -1))
+ flops += self.num_heads * N * (self.dim // self.num_heads) * N
+ # x = (attn @ v)
+ flops += self.num_heads * N * N * (self.dim // self.num_heads)
+ # x = self.proj(x)
+ flops += N * self.dim * self.dim
+ return flops
+
+class Mlp_v2(nn.Module):
+ def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):
+ super().__init__()
+ out_features = out_features or in_features
+ hidden_features = hidden_features or in_features
+ self.fc1 = nn.Linear(in_features, hidden_features)
+ self.act = act_layer()
+ self.fc2 = nn.Linear(hidden_features, out_features)
+ self.drop = nn.Dropout(drop)
+
+ def forward(self, x):
+ x = self.fc1(x)
+ x = self.act(x)
+ x = self.drop(x)
+ x = self.fc2(x)
+ x = self.drop(x)
+ return x
+
+
+def window_partition_v2(x, window_size):
+
+ B, H, W, C = x.shape
+ x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
+ windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
+ return windows
+
+
+def window_reverse_v2(windows, window_size, H, W):
+
+ B = int(windows.shape[0] / (H * W / window_size / window_size))
+ x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
+ x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
+ return x
+
+
+class SwinTransformerLayer_v2(nn.Module):
+
+ def __init__(self, dim, num_heads, window_size=7, shift_size=0,
+ mlp_ratio=4., qkv_bias=True, drop=0., attn_drop=0., drop_path=0.,
+ act_layer=nn.SiLU, norm_layer=nn.LayerNorm, pretrained_window_size=0):
+ super().__init__()
+ self.dim = dim
+ #self.input_resolution = input_resolution
+ self.num_heads = num_heads
+ self.window_size = window_size
+ self.shift_size = shift_size
+ self.mlp_ratio = mlp_ratio
+ #if min(self.input_resolution) <= self.window_size:
+ # # if window size is larger than input resolution, we don't partition windows
+ # self.shift_size = 0
+ # self.window_size = min(self.input_resolution)
+ assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
+
+ self.norm1 = norm_layer(dim)
+ self.attn = WindowAttention_v2(
+ dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,
+ qkv_bias=qkv_bias, attn_drop=attn_drop, proj_drop=drop,
+ pretrained_window_size=(pretrained_window_size, pretrained_window_size))
+
+ self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
+ self.norm2 = norm_layer(dim)
+ mlp_hidden_dim = int(dim * mlp_ratio)
+ self.mlp = Mlp_v2(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
+
+ def create_mask(self, H, W):
+ # calculate attention mask for SW-MSA
+ img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
+ h_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ w_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ cnt = 0
+ for h in h_slices:
+ for w in w_slices:
+ img_mask[:, h, w, :] = cnt
+ cnt += 1
+
+ mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
+ mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
+ attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
+ attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
+
+ return attn_mask
+
+ def forward(self, x):
+ # reshape x[b c h w] to x[b l c]
+ _, _, H_, W_ = x.shape
+
+ Padding = False
+ if min(H_, W_) < self.window_size or H_ % self.window_size!=0 or W_ % self.window_size!=0:
+ Padding = True
+ # print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')
+ pad_r = (self.window_size - W_ % self.window_size) % self.window_size
+ pad_b = (self.window_size - H_ % self.window_size) % self.window_size
+ x = F.pad(x, (0, pad_r, 0, pad_b))
+
+ # print('2', x.shape)
+ B, C, H, W = x.shape
+ L = H * W
+ x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c
+
+ # create mask from init to forward
+ if self.shift_size > 0:
+ attn_mask = self.create_mask(H, W).to(x.device)
+ else:
+ attn_mask = None
+
+ shortcut = x
+ x = x.view(B, H, W, C)
+
+ # cyclic shift
+ if self.shift_size > 0:
+ shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
+ else:
+ shifted_x = x
+
+ # partition windows
+ x_windows = window_partition_v2(shifted_x, self.window_size) # nW*B, window_size, window_size, C
+ x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
+
+ # W-MSA/SW-MSA
+ attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C
+
+ # merge windows
+ attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
+ shifted_x = window_reverse_v2(attn_windows, self.window_size, H, W) # B H' W' C
+
+ # reverse cyclic shift
+ if self.shift_size > 0:
+ x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
+ else:
+ x = shifted_x
+ x = x.view(B, H * W, C)
+ x = shortcut + self.drop_path(self.norm1(x))
+
+ # FFN
+ x = x + self.drop_path(self.norm2(self.mlp(x)))
+ x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w
+
+ if Padding:
+ x = x[:, :, :H_, :W_] # reverse padding
+
+ return x
+
+ def extra_repr(self) -> str:
+ return f"dim={self.dim}, input_resolution={self.input_resolution}, num_heads={self.num_heads}, " \
+ f"window_size={self.window_size}, shift_size={self.shift_size}, mlp_ratio={self.mlp_ratio}"
+
+ def flops(self):
+ flops = 0
+ H, W = self.input_resolution
+ # norm1
+ flops += self.dim * H * W
+ # W-MSA/SW-MSA
+ nW = H * W / self.window_size / self.window_size
+ flops += nW * self.attn.flops(self.window_size * self.window_size)
+ # mlp
+ flops += 2 * H * W * self.dim * self.dim * self.mlp_ratio
+ # norm2
+ flops += self.dim * H * W
+ return flops
+
+
+class SwinTransformer2Block(nn.Module):
+ def __init__(self, c1, c2, num_heads, num_layers, window_size=7):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+
+ # remove input_resolution
+ self.blocks = nn.Sequential(*[SwinTransformerLayer_v2(dim=c2, num_heads=num_heads, window_size=window_size,
+ shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)])
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ x = self.blocks(x)
+ return x
+
+
+class ST2CSPA(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class ST2CSPB(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class ST2CSPC(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+##### end of swin transformer v2 #####
diff --git a/oneAPI_ODAV_APP/ENGINES/models/experimental.py b/oneAPI_ODAV_APP/ENGINES/models/experimental.py
new file mode 100644
index 000000000..7ee57156b
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/models/experimental.py
@@ -0,0 +1,273 @@
+import numpy as np
+import random
+import torch
+import torch.nn as nn
+
+
+from models.common import Conv, DWConv
+from utils.google_utils import attempt_download
+
+
+class CrossConv(nn.Module):
+ # Cross Convolution Downsample
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False):
+ # ch_in, ch_out, kernel, stride, groups, expansion, shortcut
+ super(CrossConv, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, (1, k), (1, s))
+ self.cv2 = Conv(c_, c2, (k, 1), (s, 1), g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class Sum(nn.Module):
+ # Weighted sum of 2 or more layers https://arxiv.org/abs/1911.09070
+ def __init__(self, n, weight=False): # n: number of inputs
+ super(Sum, self).__init__()
+ self.weight = weight # apply weights boolean
+ self.iter = range(n - 1) # iter object
+ if weight:
+ self.w = nn.Parameter(-torch.arange(1., n) / 2, requires_grad=True) # layer weights
+
+ def forward(self, x):
+ y = x[0] # no weight
+ if self.weight:
+ w = torch.sigmoid(self.w) * 2
+ for i in self.iter:
+ y = y + x[i + 1] * w[i]
+ else:
+ for i in self.iter:
+ y = y + x[i + 1]
+ return y
+
+
+class MixConv2d(nn.Module):
+ # Mixed Depthwise Conv https://arxiv.org/abs/1907.09595
+ def __init__(self, c1, c2, k=(1, 3), s=1, equal_ch=True):
+ super(MixConv2d, self).__init__()
+ groups = len(k)
+ if equal_ch: # equal c_ per group
+ i = torch.linspace(0, groups - 1E-6, c2).floor() # c2 indices
+ c_ = [(i == g).sum() for g in range(groups)] # intermediate channels
+ else: # equal weight.numel() per group
+ b = [c2] + [0] * groups
+ a = np.eye(groups + 1, groups, k=-1)
+ a -= np.roll(a, 1, axis=1)
+ a *= np.array(k) ** 2
+ a[0] = 1
+ c_ = np.linalg.lstsq(a, b, rcond=None)[0].round() # solve for equal weight indices, ax = b
+
+ self.m = nn.ModuleList([nn.Conv2d(c1, int(c_[g]), k[g], s, k[g] // 2, bias=False) for g in range(groups)])
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.LeakyReLU(0.1, inplace=True)
+
+ def forward(self, x):
+ return x + self.act(self.bn(torch.cat([m(x) for m in self.m], 1)))
+
+
+class Ensemble(nn.ModuleList):
+ # Ensemble of models
+ def __init__(self):
+ super(Ensemble, self).__init__()
+
+ def forward(self, x, augment=False):
+ y = []
+ for module in self:
+ y.append(module(x, augment)[0])
+ # y = torch.stack(y).max(0)[0] # max ensemble
+ # y = torch.stack(y).mean(0) # mean ensemble
+ y = torch.cat(y, 1) # nms ensemble
+ return y, None # inference, train output
+
+
+
+
+
+class ORT_NMS(torch.autograd.Function):
+ '''ONNX-Runtime NMS operation'''
+ @staticmethod
+ def forward(ctx,
+ boxes,
+ scores,
+ max_output_boxes_per_class=torch.tensor([100]),
+ iou_threshold=torch.tensor([0.45]),
+ score_threshold=torch.tensor([0.25])):
+ device = boxes.device
+ batch = scores.shape[0]
+ num_det = random.randint(0, 100)
+ batches = torch.randint(0, batch, (num_det,)).sort()[0].to(device)
+ idxs = torch.arange(100, 100 + num_det).to(device)
+ zeros = torch.zeros((num_det,), dtype=torch.int64).to(device)
+ selected_indices = torch.cat([batches[None], zeros[None], idxs[None]], 0).T.contiguous()
+ selected_indices = selected_indices.to(torch.int64)
+ return selected_indices
+
+ @staticmethod
+ def symbolic(g, boxes, scores, max_output_boxes_per_class, iou_threshold, score_threshold):
+ return g.op("NonMaxSuppression", boxes, scores, max_output_boxes_per_class, iou_threshold, score_threshold)
+
+
+class TRT_NMS(torch.autograd.Function):
+ '''TensorRT NMS operation'''
+ @staticmethod
+ def forward(
+ ctx,
+ boxes,
+ scores,
+ background_class=-1,
+ box_coding=1,
+ iou_threshold=0.45,
+ max_output_boxes=100,
+ plugin_version="1",
+ score_activation=0,
+ score_threshold=0.25,
+ ):
+ batch_size, num_boxes, num_classes = scores.shape
+ num_det = torch.randint(0, max_output_boxes, (batch_size, 1), dtype=torch.int32)
+ det_boxes = torch.randn(batch_size, max_output_boxes, 4)
+ det_scores = torch.randn(batch_size, max_output_boxes)
+ det_classes = torch.randint(0, num_classes, (batch_size, max_output_boxes), dtype=torch.int32)
+ return num_det, det_boxes, det_scores, det_classes
+
+ @staticmethod
+ def symbolic(g,
+ boxes,
+ scores,
+ background_class=-1,
+ box_coding=1,
+ iou_threshold=0.45,
+ max_output_boxes=100,
+ plugin_version="1",
+ score_activation=0,
+ score_threshold=0.25):
+ out = g.op("TRT::EfficientNMS_TRT",
+ boxes,
+ scores,
+ background_class_i=background_class,
+ box_coding_i=box_coding,
+ iou_threshold_f=iou_threshold,
+ max_output_boxes_i=max_output_boxes,
+ plugin_version_s=plugin_version,
+ score_activation_i=score_activation,
+ score_threshold_f=score_threshold,
+ outputs=4)
+ nums, boxes, scores, classes = out
+ return nums, boxes, scores, classes
+
+
+class ONNX_ORT(nn.Module):
+ '''onnx module with ONNX-Runtime NMS operation.'''
+ def __init__(self, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=640, device=None, n_classes=80):
+ super().__init__()
+ self.device = device if device else torch.device("cpu")
+ self.max_obj = torch.tensor([max_obj]).to(device)
+ self.iou_threshold = torch.tensor([iou_thres]).to(device)
+ self.score_threshold = torch.tensor([score_thres]).to(device)
+ self.max_wh = max_wh # if max_wh != 0 : non-agnostic else : agnostic
+ self.convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=self.device)
+ self.n_classes=n_classes
+
+ def forward(self, x):
+ boxes = x[:, :, :4]
+ conf = x[:, :, 4:5]
+ scores = x[:, :, 5:]
+ if self.n_classes == 1:
+ scores = conf # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ scores *= conf # conf = obj_conf * cls_conf
+ boxes @= self.convert_matrix
+ max_score, category_id = scores.max(2, keepdim=True)
+ dis = category_id.float() * self.max_wh
+ nmsbox = boxes + dis
+ max_score_tp = max_score.transpose(1, 2).contiguous()
+ selected_indices = ORT_NMS.apply(nmsbox, max_score_tp, self.max_obj, self.iou_threshold, self.score_threshold)
+ X, Y = selected_indices[:, 0], selected_indices[:, 2]
+ selected_boxes = boxes[X, Y, :]
+ selected_categories = category_id[X, Y, :].float()
+ selected_scores = max_score[X, Y, :]
+ X = X.unsqueeze(1).float()
+ return torch.cat([X, selected_boxes, selected_categories, selected_scores], 1)
+
+class ONNX_TRT(nn.Module):
+ '''onnx module with TensorRT NMS operation.'''
+ def __init__(self, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=None ,device=None, n_classes=80):
+ super().__init__()
+ assert max_wh is None
+ self.device = device if device else torch.device('cpu')
+ self.background_class = -1,
+ self.box_coding = 1,
+ self.iou_threshold = iou_thres
+ self.max_obj = max_obj
+ self.plugin_version = '1'
+ self.score_activation = 0
+ self.score_threshold = score_thres
+ self.n_classes=n_classes
+
+ def forward(self, x):
+ boxes = x[:, :, :4]
+ conf = x[:, :, 4:5]
+ scores = x[:, :, 5:]
+ if self.n_classes == 1:
+ scores = conf # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ scores *= conf # conf = obj_conf * cls_conf
+ num_det, det_boxes, det_scores, det_classes = TRT_NMS.apply(boxes, scores, self.background_class, self.box_coding,
+ self.iou_threshold, self.max_obj,
+ self.plugin_version, self.score_activation,
+ self.score_threshold)
+ return num_det, det_boxes, det_scores, det_classes
+
+
+class End2End(nn.Module):
+ '''export onnx or tensorrt model with NMS operation.'''
+ def __init__(self, model, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=None, device=None, n_classes=80):
+ super().__init__()
+ device = device if device else torch.device('cpu')
+ assert isinstance(max_wh,(int)) or max_wh is None
+ self.model = model.to(device)
+ self.model.model[-1].end2end = True
+ self.patch_model = ONNX_TRT if max_wh is None else ONNX_ORT
+ self.end2end = self.patch_model(max_obj, iou_thres, score_thres, max_wh, device, n_classes)
+ self.end2end.eval()
+
+ def forward(self, x):
+ x = self.model(x)
+ x = self.end2end(x)
+ return x
+
+
+
+
+
+def attempt_load(weights, map_location=None):
+ # Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a
+ model = Ensemble()
+ for w in weights if isinstance(weights, list) else [weights]:
+ attempt_download(w)
+ ckpt = torch.load(w, map_location=map_location) # load
+ model.append(ckpt['ema' if ckpt.get('ema') else 'model'].float().fuse().eval()) # FP32 model
+
+ # Compatibility updates
+ for m in model.modules():
+ if type(m) in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
+ m.inplace = True # pytorch 1.7.0 compatibility
+ elif type(m) is nn.Upsample:
+ m.recompute_scale_factor = None # torch 1.11.0 compatibility
+ elif type(m) is Conv:
+ m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatibility
+
+ if len(model) == 1:
+ return model[-1] # return model
+ else:
+ print('Ensemble created with %s\n' % weights)
+ for k in ['names', 'stride']:
+ setattr(model, k, getattr(model[-1], k))
+ return model # return ensemble
+
+
diff --git a/oneAPI_ODAV_APP/ENGINES/models/yolo.py b/oneAPI_ODAV_APP/ENGINES/models/yolo.py
new file mode 100644
index 000000000..222a962e2
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/models/yolo.py
@@ -0,0 +1,844 @@
+import argparse
+import logging
+import sys
+from copy import deepcopy
+
+
+sys.path.append('./') # to run '$ python *.py' files in subdirectories
+logger = logging.getLogger(__name__)
+import torch
+from models.common import *
+from models.experimental import *
+from utils.autoanchor import check_anchor_order
+from utils.general import make_divisible, check_file, set_logging
+from utils.torch_utils import time_synchronized, fuse_conv_and_bn, model_info, scale_img, initialize_weights, \
+ select_device, copy_attr
+from utils.loss import SigmoidBin
+
+try:
+ import thop # for FLOPS computation
+except ImportError:
+ thop = None
+
+
+class Detect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(Detect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IDetect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(IDetect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ def fuseforward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ def fuse(self):
+ print("IDetect.fuse")
+ # fuse ImplicitA and Convolution
+ for i in range(len(self.m)):
+ c1,c2,_,_ = self.m[i].weight.shape
+ c1_,c2_, _,_ = self.ia[i].implicit.shape
+ self.m[i].bias += torch.matmul(self.m[i].weight.reshape(c1,c2),self.ia[i].implicit.reshape(c2_,c1_)).squeeze(1)
+
+ # fuse ImplicitM and Convolution
+ for i in range(len(self.m)):
+ c1,c2, _,_ = self.im[i].implicit.shape
+ self.m[i].bias *= self.im[i].implicit.reshape(c2)
+ self.m[i].weight *= self.im[i].implicit.transpose(0,1)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IKeypoint(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, nc=80, anchors=(), nkpt=17, ch=(), inplace=True, dw_conv_kpt=False): # detection layer
+ super(IKeypoint, self).__init__()
+ self.nc = nc # number of classes
+ self.nkpt = nkpt
+ self.dw_conv_kpt = dw_conv_kpt
+ self.no_det=(nc + 5) # number of outputs per anchor for box and class
+ self.no_kpt = 3*self.nkpt ## number of outputs per anchor for keypoints
+ self.no = self.no_det+self.no_kpt
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ self.flip_test = False
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no_det * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no_det * self.na) for _ in ch)
+
+ if self.nkpt is not None:
+ if self.dw_conv_kpt: #keypoint head is slightly more complex
+ self.m_kpt = nn.ModuleList(
+ nn.Sequential(DWConv(x, x, k=3), Conv(x,x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), Conv(x,x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), nn.Conv2d(x, self.no_kpt * self.na, 1)) for x in ch)
+ else: #keypoint head is a single convolution
+ self.m_kpt = nn.ModuleList(nn.Conv2d(x, self.no_kpt * self.na, 1) for x in ch)
+
+ self.inplace = inplace # use in-place ops (e.g. slice assignment)
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ if self.nkpt is None or self.nkpt==0:
+ x[i] = self.im[i](self.m[i](self.ia[i](x[i]))) # conv
+ else :
+ x[i] = torch.cat((self.im[i](self.m[i](self.ia[i](x[i]))), self.m_kpt[i](x[i])), axis=1)
+
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+ x_det = x[i][..., :6]
+ x_kpt = x[i][..., 6:]
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+ kpt_grid_x = self.grid[i][..., 0:1]
+ kpt_grid_y = self.grid[i][..., 1:2]
+
+ if self.nkpt == 0:
+ y = x[i].sigmoid()
+ else:
+ y = x_det.sigmoid()
+
+ if self.inplace:
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i].view(1, self.na, 1, 1, 2) # wh
+ if self.nkpt != 0:
+ x_kpt[..., 0::3] = (x_kpt[..., ::3] * 2. - 0.5 + kpt_grid_x.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ x_kpt[..., 1::3] = (x_kpt[..., 1::3] * 2. - 0.5 + kpt_grid_y.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #x_kpt[..., 0::3] = (x_kpt[..., ::3] + kpt_grid_x.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = (x_kpt[..., 1::3] + kpt_grid_y.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #print('=============')
+ #print(self.anchor_grid[i].shape)
+ #print(self.anchor_grid[i][...,0].unsqueeze(4).shape)
+ #print(x_kpt[..., 0::3].shape)
+ #x_kpt[..., 0::3] = ((x_kpt[..., 0::3].tanh() * 2.) ** 3 * self.anchor_grid[i][...,0].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_x.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = ((x_kpt[..., 1::3].tanh() * 2.) ** 3 * self.anchor_grid[i][...,1].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_y.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 0::3] = (((x_kpt[..., 0::3].sigmoid() * 4.) ** 2 - 8.) * self.anchor_grid[i][...,0].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_x.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = (((x_kpt[..., 1::3].sigmoid() * 4.) ** 2 - 8.) * self.anchor_grid[i][...,1].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_y.repeat(1,1,1,1,17) * self.stride[i] # xy
+ x_kpt[..., 2::3] = x_kpt[..., 2::3].sigmoid()
+
+ y = torch.cat((xy, wh, y[..., 4:], x_kpt), dim = -1)
+
+ else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ if self.nkpt != 0:
+ y[..., 6:] = (y[..., 6:] * 2. - 0.5 + self.grid[i].repeat((1,1,1,1,self.nkpt))) * self.stride[i] # xy
+ y = torch.cat((xy, wh, y[..., 4:]), -1)
+
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+
+class IAuxDetect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(IAuxDetect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[:self.nl]) # output conv
+ self.m2 = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[self.nl:]) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch[:self.nl])
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch[:self.nl])
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ x[i+self.nl] = self.m2[i](x[i+self.nl])
+ x[i+self.nl] = x[i+self.nl].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x[:self.nl])
+
+ def fuseforward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i].data # wh
+ y = torch.cat((xy, wh, y[..., 4:]), -1)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ def fuse(self):
+ print("IAuxDetect.fuse")
+ # fuse ImplicitA and Convolution
+ for i in range(len(self.m)):
+ c1,c2,_,_ = self.m[i].weight.shape
+ c1_,c2_, _,_ = self.ia[i].implicit.shape
+ self.m[i].bias += torch.matmul(self.m[i].weight.reshape(c1,c2),self.ia[i].implicit.reshape(c2_,c1_)).squeeze(1)
+
+ # fuse ImplicitM and Convolution
+ for i in range(len(self.m)):
+ c1,c2, _,_ = self.im[i].implicit.shape
+ self.m[i].bias *= self.im[i].implicit.reshape(c2)
+ self.m[i].weight *= self.im[i].implicit.transpose(0,1)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IBin(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, nc=80, anchors=(), ch=(), bin_count=21): # detection layer
+ super(IBin, self).__init__()
+ self.nc = nc # number of classes
+ self.bin_count = bin_count
+
+ self.w_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0)
+ self.h_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0)
+ # classes, x,y,obj
+ self.no = nc + 3 + \
+ self.w_bin_sigmoid.get_length() + self.h_bin_sigmoid.get_length() # w-bce, h-bce
+ # + self.x_bin_sigmoid.get_length() + self.y_bin_sigmoid.get_length()
+
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
+
+ def forward(self, x):
+
+ #self.x_bin_sigmoid.use_fw_regression = True
+ #self.y_bin_sigmoid.use_fw_regression = True
+ self.w_bin_sigmoid.use_fw_regression = True
+ self.h_bin_sigmoid.use_fw_regression = True
+
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ #y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+
+
+ #px = (self.x_bin_sigmoid.forward(y[..., 0:12]) + self.grid[i][..., 0]) * self.stride[i]
+ #py = (self.y_bin_sigmoid.forward(y[..., 12:24]) + self.grid[i][..., 1]) * self.stride[i]
+
+ pw = self.w_bin_sigmoid.forward(y[..., 2:24]) * self.anchor_grid[i][..., 0]
+ ph = self.h_bin_sigmoid.forward(y[..., 24:46]) * self.anchor_grid[i][..., 1]
+
+ #y[..., 0] = px
+ #y[..., 1] = py
+ y[..., 2] = pw
+ y[..., 3] = ph
+
+ y = torch.cat((y[..., 0:4], y[..., 46:]), dim=-1)
+
+ z.append(y.view(bs, -1, y.shape[-1]))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+
+class Model(nn.Module):
+ def __init__(self, cfg='yolor-csp-c.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classes
+ super(Model, self).__init__()
+ self.traced = False
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg) as f:
+ self.yaml = yaml.load(f, Loader=yaml.SafeLoader) # model dict
+
+ # Define model
+ ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels
+ if nc and nc != self.yaml['nc']:
+ logger.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ if anchors:
+ logger.info(f'Overriding model.yaml anchors with anchors={anchors}')
+ self.yaml['anchors'] = round(anchors) # override yaml value
+ self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist
+ self.names = [str(i) for i in range(self.yaml['nc'])] # default names
+ # print([x.shape for x in self.forward(torch.zeros(1, ch, 64, 64))])
+
+ # Build strides, anchors
+ m = self.model[-1] # Detect()
+ if isinstance(m, Detect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IDetect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IAuxDetect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))[:4]]) # forward
+ #print(m.stride)
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_aux_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IBin):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases_bin() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IKeypoint):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases_kpt() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+
+ # Init weights, biases
+ initialize_weights(self)
+ self.info()
+ logger.info('')
+
+ def forward(self, x, augment=False, profile=False):
+ if augment:
+ img_size = x.shape[-2:] # height, width
+ s = [1, 0.83, 0.67] # scales
+ f = [None, 3, None] # flips (2-ud, 3-lr)
+ y = [] # outputs
+ for si, fi in zip(s, f):
+ xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
+ yi = self.forward_once(xi)[0] # forward
+ # cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # save
+ yi[..., :4] /= si # de-scale
+ if fi == 2:
+ yi[..., 1] = img_size[0] - yi[..., 1] # de-flip ud
+ elif fi == 3:
+ yi[..., 0] = img_size[1] - yi[..., 0] # de-flip lr
+ y.append(yi)
+ return torch.cat(y, 1), None # augmented inference, train
+ else:
+ return self.forward_once(x, profile) # single-scale inference, train
+
+ def forward_once(self, x, profile=False):
+ y, dt = [], [] # outputs
+ for m in self.model:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+
+ if not hasattr(self, 'traced'):
+ self.traced=False
+
+ if self.traced:
+ if isinstance(m, Detect) or isinstance(m, IDetect) or isinstance(m, IAuxDetect) or isinstance(m, IKeypoint):
+ break
+
+ if profile:
+ c = isinstance(m, (Detect, IDetect, IAuxDetect, IBin))
+ o = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPS
+ for _ in range(10):
+ m(x.copy() if c else x)
+ t = time_synchronized()
+ for _ in range(10):
+ m(x.copy() if c else x)
+ dt.append((time_synchronized() - t) * 100)
+ print('%10.1f%10.0f%10.1fms %-40s' % (o, m.np, dt[-1], m.type))
+
+ x = m(x) # run
+
+ y.append(x if m.i in self.save else None) # save output
+
+ if profile:
+ print('%.1fms total' % sum(dt))
+ return x
+
+ def _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _initialize_aux_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, mi2, s in zip(m.m, m.m2, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+ b2 = mi2.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b2.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b2.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi2.bias = torch.nn.Parameter(b2.view(-1), requires_grad=True)
+
+ def _initialize_biases_bin(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Bin() module
+ bc = m.bin_count
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ old = b[:, (0,1,2,bc+3)].data
+ obj_idx = 2*bc+4
+ b[:, :obj_idx].data += math.log(0.6 / (bc + 1 - 0.99))
+ b[:, obj_idx].data += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b[:, (obj_idx+1):].data += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ b[:, (0,1,2,bc+3)].data = old
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _initialize_biases_kpt(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _print_biases(self):
+ m = self.model[-1] # Detect() module
+ for mi in m.m: # from
+ b = mi.bias.detach().view(m.na, -1).T # conv.bias(255) to (3,85)
+ print(('%6g Conv2d.bias:' + '%10.3g' * 6) % (mi.weight.shape[1], *b[:5].mean(1).tolist(), b[5:].mean()))
+
+ # def _print_weights(self):
+ # for m in self.model.modules():
+ # if type(m) is Bottleneck:
+ # print('%10.3g' % (m.w.detach().sigmoid() * 2)) # shortcut weights
+
+ def fuse(self): # fuse model Conv2d() + BatchNorm2d() layers
+ print('Fusing layers... ')
+ for m in self.model.modules():
+ if isinstance(m, RepConv):
+ #print(f" fuse_repvgg_block")
+ m.fuse_repvgg_block()
+ elif isinstance(m, RepConv_OREPA):
+ #print(f" switch_to_deploy")
+ m.switch_to_deploy()
+ elif type(m) is Conv and hasattr(m, 'bn'):
+ m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
+ delattr(m, 'bn') # remove batchnorm
+ m.forward = m.fuseforward # update forward
+ elif isinstance(m, (IDetect, IAuxDetect)):
+ m.fuse()
+ m.forward = m.fuseforward
+ self.info()
+ return self
+
+ def nms(self, mode=True): # add or remove NMS module
+ present = type(self.model[-1]) is NMS # last layer is NMS
+ if mode and not present:
+ print('Adding NMS... ')
+ m = NMS() # module
+ m.f = -1 # from
+ m.i = self.model[-1].i + 1 # index
+ self.model.add_module(name='%s' % m.i, module=m) # add
+ self.eval()
+ elif not mode and present:
+ print('Removing NMS... ')
+ self.model = self.model[:-1] # remove
+ return self
+
+ def autoshape(self): # add autoShape module
+ print('Adding autoShape... ')
+ m = autoShape(self) # wrap model
+ copy_attr(m, self, include=('yaml', 'nc', 'hyp', 'names', 'stride'), exclude=()) # copy attributes
+ return m
+
+ def info(self, verbose=False, img_size=640): # print model information
+ model_info(self, verbose, img_size)
+
+
+def parse_model(d, ch): # model_dict, input_channels(3)
+ logger.info('\n%3s%18s%3s%10s %-40s%-30s' % ('', 'from', 'n', 'params', 'module', 'arguments'))
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ try:
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+ except:
+ pass
+
+ n = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in [nn.Conv2d, Conv, RobustConv, RobustConv2, DWConv, GhostConv, RepConv, RepConv_OREPA, DownC,
+ SPP, SPPF, SPPCSPC, GhostSPPCSPC, MixConv2d, Focus, Stem, GhostStem, CrossConv,
+ Bottleneck, BottleneckCSPA, BottleneckCSPB, BottleneckCSPC,
+ RepBottleneck, RepBottleneckCSPA, RepBottleneckCSPB, RepBottleneckCSPC,
+ Res, ResCSPA, ResCSPB, ResCSPC,
+ RepRes, RepResCSPA, RepResCSPB, RepResCSPC,
+ ResX, ResXCSPA, ResXCSPB, ResXCSPC,
+ RepResX, RepResXCSPA, RepResXCSPB, RepResXCSPC,
+ Ghost, GhostCSPA, GhostCSPB, GhostCSPC,
+ SwinTransformerBlock, STCSPA, STCSPB, STCSPC,
+ SwinTransformer2Block, ST2CSPA, ST2CSPB, ST2CSPC]:
+ c1, c2 = ch[f], args[0]
+ if c2 != no: # if not output
+ c2 = make_divisible(c2 * gw, 8)
+
+ args = [c1, c2, *args[1:]]
+ if m in [DownC, SPPCSPC, GhostSPPCSPC,
+ BottleneckCSPA, BottleneckCSPB, BottleneckCSPC,
+ RepBottleneckCSPA, RepBottleneckCSPB, RepBottleneckCSPC,
+ ResCSPA, ResCSPB, ResCSPC,
+ RepResCSPA, RepResCSPB, RepResCSPC,
+ ResXCSPA, ResXCSPB, ResXCSPC,
+ RepResXCSPA, RepResXCSPB, RepResXCSPC,
+ GhostCSPA, GhostCSPB, GhostCSPC,
+ STCSPA, STCSPB, STCSPC,
+ ST2CSPA, ST2CSPB, ST2CSPC]:
+ args.insert(2, n) # number of repeats
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum([ch[x] for x in f])
+ elif m is Chuncat:
+ c2 = sum([ch[x] for x in f])
+ elif m is Shortcut:
+ c2 = ch[f[0]]
+ elif m is Foldcut:
+ c2 = ch[f] // 2
+ elif m in [Detect, IDetect, IAuxDetect, IBin, IKeypoint]:
+ args.append([ch[x] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ elif m is ReOrg:
+ c2 = ch[f] * 4
+ elif m is Contract:
+ c2 = ch[f] * args[0] ** 2
+ elif m is Expand:
+ c2 = ch[f] // args[0] ** 2
+ else:
+ c2 = ch[f]
+
+ m_ = nn.Sequential(*[m(*args) for _ in range(n)]) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum([x.numel() for x in m_.parameters()]) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ logger.info('%3s%18s%3s%10.0f %-40s%-30s' % (i, f, n, np, t, args)) # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ if i == 0:
+ ch = []
+ ch.append(c2)
+ return nn.Sequential(*layers), sorted(save)
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--cfg', type=str, default='yolor-csp-c.yaml', help='model.yaml')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--profile', action='store_true', help='profile model speed')
+ opt = parser.parse_args()
+ opt.cfg = check_file(opt.cfg) # check file
+ set_logging()
+ device = select_device(opt.device)
+
+ # Create model
+ model = Model(opt.cfg).to(device)
+ model.train()
+
+ if opt.profile:
+ img = torch.rand(1, 3, 640, 640).to(device)
+ y = model(img, profile=True)
+
+ # Profile
+ # img = torch.rand(8 if torch.cuda.is_available() else 1, 3, 640, 640).to(device)
+ # y = model(img, profile=True)
+
+ # Tensorboard
+ # from torch.utils.tensorboard import SummaryWriter
+ # tb_writer = SummaryWriter()
+ # print("Run 'tensorboard --logdir=models/runs' to view tensorboard at http://localhost:6006/")
+ # tb_writer.add_graph(model.model, img) # add model to tensorboard
+ # tb_writer.add_image('test', img[0], dataformats='CWH') # add model to tensorboard
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/__init__.py b/oneAPI_ODAV_APP/ENGINES/utils/__init__.py
new file mode 100644
index 000000000..a6131c10e
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/__init__.py
@@ -0,0 +1 @@
+# init
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/activations.py b/oneAPI_ODAV_APP/ENGINES/utils/activations.py
new file mode 100644
index 000000000..5ad1735d7
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/activations.py
@@ -0,0 +1,73 @@
+# Activation functions
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+
+# SiLU https://arxiv.org/pdf/1606.08415.pdf ----------------------------------------------------------------------------
+class SiLU(nn.Module): # export-friendly version of nn.SiLU()
+ @staticmethod
+ def forward(x):
+ return x * torch.sigmoid(x)
+
+
+
+class Hardswish(nn.Module): # export-friendly version of nn.Hardswish()
+ @staticmethod
+ def forward(x):
+ # return x * F.hardsigmoid(x) # for torchscript and CoreML
+ return x * F.hardtanh(x + 3, 0., 6.) / 6. # for torchscript, CoreML and ONNX
+
+
+class MemoryEfficientSwish(nn.Module):
+ class F(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x * torch.sigmoid(x)
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ return grad_output * (sx * (1 + x * (1 - sx)))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+# Mish https://github.com/digantamisra98/Mish --------------------------------------------------------------------------
+class Mish(nn.Module):
+ @staticmethod
+ def forward(x):
+ return x * F.softplus(x).tanh()
+
+
+class MemoryEfficientMish(nn.Module):
+ class F(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ fx = F.softplus(x).tanh()
+ return grad_output * (fx + x * sx * (1 - fx * fx))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+# FReLU https://arxiv.org/abs/2007.11824 -------------------------------------------------------------------------------
+class FReLU(nn.Module):
+ def __init__(self, c1, k=3): # ch_in, kernel
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
+ self.bn = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ return torch.max(x, self.bn(self.conv(x)))
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/add_nms.py b/oneAPI_ODAV_APP/ENGINES/utils/add_nms.py
new file mode 100644
index 000000000..30318d94e
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/add_nms.py
@@ -0,0 +1,156 @@
+import numpy as np
+import onnx
+from onnx import shape_inference
+try:
+ import onnx_graphsurgeon as gs
+except Exception as e:
+ print('Import onnx_graphsurgeon failure: %s' % e)
+
+import logging
+
+
+LOGGER = logging.getLogger(__name__)
+
+class RegisterNMS(object):
+ def __init__(
+ self,
+ onnx_model_path: str,
+ precision: str = "fp32",
+ ):
+
+ self.graph = gs.import_onnx(onnx.load(onnx_model_path))
+ assert self.graph
+ LOGGER.info("ONNX graph created successfully")
+ # Fold constants via ONNX-GS that PyTorch2ONNX may have missed
+ self.graph.fold_constants()
+ self.precision = precision
+ self.batch_size = 1
+ def infer(self):
+ """
+ Sanitize the graph by cleaning any unconnected nodes, do a topological resort,
+ and fold constant inputs values. When possible, run shape inference on the
+ ONNX graph to determine tensor shapes.
+ """
+ for _ in range(3):
+ count_before = len(self.graph.nodes)
+
+ self.graph.cleanup().toposort()
+ try:
+ for node in self.graph.nodes:
+ for o in node.outputs:
+ o.shape = None
+ model = gs.export_onnx(self.graph)
+ model = shape_inference.infer_shapes(model)
+ self.graph = gs.import_onnx(model)
+ except Exception as e:
+ LOGGER.info(f"Shape inference could not be performed at this time:\n{e}")
+ try:
+ self.graph.fold_constants(fold_shapes=True)
+ except TypeError as e:
+ LOGGER.error(
+ "This version of ONNX GraphSurgeon does not support folding shapes, "
+ f"please upgrade your onnx_graphsurgeon module. Error:\n{e}"
+ )
+ raise
+
+ count_after = len(self.graph.nodes)
+ if count_before == count_after:
+ # No new folding occurred in this iteration, so we can stop for now.
+ break
+
+ def save(self, output_path):
+ """
+ Save the ONNX model to the given location.
+ Args:
+ output_path: Path pointing to the location where to write
+ out the updated ONNX model.
+ """
+ self.graph.cleanup().toposort()
+ model = gs.export_onnx(self.graph)
+ onnx.save(model, output_path)
+ LOGGER.info(f"Saved ONNX model to {output_path}")
+
+ def register_nms(
+ self,
+ *,
+ score_thresh: float = 0.25,
+ nms_thresh: float = 0.45,
+ detections_per_img: int = 100,
+ ):
+ """
+ Register the ``EfficientNMS_TRT`` plugin node.
+ NMS expects these shapes for its input tensors:
+ - box_net: [batch_size, number_boxes, 4]
+ - class_net: [batch_size, number_boxes, number_labels]
+ Args:
+ score_thresh (float): The scalar threshold for score (low scoring boxes are removed).
+ nms_thresh (float): The scalar threshold for IOU (new boxes that have high IOU
+ overlap with previously selected boxes are removed).
+ detections_per_img (int): Number of best detections to keep after NMS.
+ """
+
+ self.infer()
+ # Find the concat node at the end of the network
+ op_inputs = self.graph.outputs
+ op = "EfficientNMS_TRT"
+ attrs = {
+ "plugin_version": "1",
+ "background_class": -1, # no background class
+ "max_output_boxes": detections_per_img,
+ "score_threshold": score_thresh,
+ "iou_threshold": nms_thresh,
+ "score_activation": False,
+ "box_coding": 0,
+ }
+
+ if self.precision == "fp32":
+ dtype_output = np.float32
+ elif self.precision == "fp16":
+ dtype_output = np.float16
+ else:
+ raise NotImplementedError(f"Currently not supports precision: {self.precision}")
+
+ # NMS Outputs
+ output_num_detections = gs.Variable(
+ name="num_dets",
+ dtype=np.int32,
+ shape=[self.batch_size, 1],
+ ) # A scalar indicating the number of valid detections per batch image.
+ output_boxes = gs.Variable(
+ name="det_boxes",
+ dtype=dtype_output,
+ shape=[self.batch_size, detections_per_img, 4],
+ )
+ output_scores = gs.Variable(
+ name="det_scores",
+ dtype=dtype_output,
+ shape=[self.batch_size, detections_per_img],
+ )
+ output_labels = gs.Variable(
+ name="det_classes",
+ dtype=np.int32,
+ shape=[self.batch_size, detections_per_img],
+ )
+
+ op_outputs = [output_num_detections, output_boxes, output_scores, output_labels]
+
+ # Create the NMS Plugin node with the selected inputs. The outputs of the node will also
+ # become the final outputs of the graph.
+ self.graph.layer(op=op, name="batched_nms", inputs=op_inputs, outputs=op_outputs, attrs=attrs)
+ LOGGER.info(f"Created NMS plugin '{op}' with attributes: {attrs}")
+
+ self.graph.outputs = op_outputs
+
+ self.infer()
+
+ def save(self, output_path):
+ """
+ Save the ONNX model to the given location.
+ Args:
+ output_path: Path pointing to the location where to write
+ out the updated ONNX model.
+ """
+ self.graph.cleanup().toposort()
+ model = gs.export_onnx(self.graph)
+ onnx.save(model, output_path)
+ LOGGER.info(f"Saved ONNX model to {output_path}")
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/autoanchor.py b/oneAPI_ODAV_APP/ENGINES/utils/autoanchor.py
new file mode 100644
index 000000000..2f4bb24ac
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/autoanchor.py
@@ -0,0 +1,161 @@
+# Auto-anchor utils
+
+import numpy as np
+import torch
+import yaml
+from scipy.cluster.vq import kmeans
+from tqdm import tqdm
+
+from utils.general import colorstr
+
+
+
+def check_anchor_order(m):
+ # Check anchor order against stride order for YOLO Detect() module m, and correct if necessary
+ a = m.anchor_grid.prod(-1).view(-1) # anchor area
+ da = a[-1] - a[0] # delta a
+ ds = m.stride[-1] - m.stride[0] # delta s
+ if da.sign() != ds.sign(): # same order
+ print('Reversing anchor order')
+ m.anchors[:] = m.anchors.flip(0)
+ m.anchor_grid[:] = m.anchor_grid.flip(0)
+
+
+def check_anchors(dataset, model, thr=4.0, imgsz=640):
+ # Check anchor fit to data, recompute if necessary
+ prefix = colorstr('autoanchor: ')
+ print(f'\n{prefix}Analyzing anchors... ', end='')
+ m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
+ shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
+ wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
+
+ def metric(k): # compute metric
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1. / r).min(2)[0] # ratio metric
+ best = x.max(1)[0] # best_x
+ aat = (x > 1. / thr).float().sum(1).mean() # anchors above threshold
+ bpr = (best > 1. / thr).float().mean() # best possible recall
+ return bpr, aat
+
+ anchors = m.anchor_grid.clone().cpu().view(-1, 2) # current anchors
+ bpr, aat = metric(anchors)
+ print(f'anchors/target = {aat:.2f}, Best Possible Recall (BPR) = {bpr:.4f}', end='')
+ if bpr < 0.98: # threshold to recompute
+ print('. Attempting to improve anchors, please wait...')
+ na = m.anchor_grid.numel() // 2 # number of anchors
+ try:
+ anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
+ except Exception as e:
+ print(f'{prefix}ERROR: {e}')
+ new_bpr = metric(anchors)[0]
+ if new_bpr > bpr: # replace anchors
+ anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
+ m.anchor_grid[:] = anchors.clone().view_as(m.anchor_grid) # for inference
+ check_anchor_order(m)
+ m.anchors[:] = anchors.clone().view_as(m.anchors) / m.stride.to(m.anchors.device).view(-1, 1, 1) # loss
+ print(f'{prefix}New anchors saved to model. Update model *.yaml to use these anchors in the future.')
+ else:
+ print(f'{prefix}Original anchors better than new anchors. Proceeding with original anchors.')
+ print('') # newline
+
+
+def kmean_anchors(path='./data/coco.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
+ """ Creates kmeans-evolved anchors from training dataset
+
+ Arguments:
+ path: path to dataset *.yaml, or a loaded dataset
+ n: number of anchors
+ img_size: image size used for training
+ thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
+ gen: generations to evolve anchors using genetic algorithm
+ verbose: print all results
+
+ Return:
+ k: kmeans evolved anchors
+
+ Usage:
+ from utils.autoanchor import *; _ = kmean_anchors()
+ """
+ thr = 1. / thr
+ prefix = colorstr('autoanchor: ')
+
+ def metric(k, wh): # compute metrics
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1. / r).min(2)[0] # ratio metric
+ # x = wh_iou(wh, torch.tensor(k)) # iou metric
+ return x, x.max(1)[0] # x, best_x
+
+ def anchor_fitness(k): # mutation fitness
+ _, best = metric(torch.tensor(k, dtype=torch.float32), wh)
+ return (best * (best > thr).float()).mean() # fitness
+
+ def print_results(k):
+ k = k[np.argsort(k.prod(1))] # sort small to large
+ x, best = metric(k, wh0)
+ bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
+ print(f'{prefix}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr')
+ print(f'{prefix}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, '
+ f'past_thr={x[x > thr].mean():.3f}-mean: ', end='')
+ for i, x in enumerate(k):
+ print('%i,%i' % (round(x[0]), round(x[1])), end=', ' if i < len(k) - 1 else '\n') # use in *.cfg
+ return k
+
+ if isinstance(path, str): # *.yaml file
+ with open(path) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # model dict
+ from utils.datasets import LoadImagesAndLabels
+ dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
+ else:
+ dataset = path # dataset
+
+ # Get label wh
+ shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
+
+ # Filter
+ i = (wh0 < 3.0).any(1).sum()
+ if i:
+ print(f'{prefix}WARNING: Extremely small objects found. {i} of {len(wh0)} labels are < 3 pixels in size.')
+ wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ # wh = wh * (np.random.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
+
+ # Kmeans calculation
+ print(f'{prefix}Running kmeans for {n} anchors on {len(wh)} points...')
+ s = wh.std(0) # sigmas for whitening
+ k, dist = kmeans(wh / s, n, iter=30) # points, mean distance
+ assert len(k) == n, print(f'{prefix}ERROR: scipy.cluster.vq.kmeans requested {n} points but returned only {len(k)}')
+ k *= s
+ wh = torch.tensor(wh, dtype=torch.float32) # filtered
+ wh0 = torch.tensor(wh0, dtype=torch.float32) # unfiltered
+ k = print_results(k)
+
+ # Plot
+ # k, d = [None] * 20, [None] * 20
+ # for i in tqdm(range(1, 21)):
+ # k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
+ # ax = ax.ravel()
+ # ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
+ # ax[0].hist(wh[wh[:, 0]<100, 0],400)
+ # ax[1].hist(wh[wh[:, 1]<100, 1],400)
+ # fig.savefig('wh.png', dpi=200)
+
+ # Evolve
+ npr = np.random
+ f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
+ pbar = tqdm(range(gen), desc=f'{prefix}Evolving anchors with Genetic Algorithm:') # progress bar
+ for _ in pbar:
+ v = np.ones(sh)
+ while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
+ v = ((npr.random(sh) < mp) * npr.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
+ kg = (k.copy() * v).clip(min=2.0)
+ fg = anchor_fitness(kg)
+ if fg > f:
+ f, k = fg, kg.copy()
+ pbar.desc = f'{prefix}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
+ if verbose:
+ print_results(k)
+
+ return print_results(k)
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/aws/__init__.py b/oneAPI_ODAV_APP/ENGINES/utils/aws/__init__.py
new file mode 100644
index 000000000..e2cbd5382
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/aws/__init__.py
@@ -0,0 +1 @@
+#init
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/aws/mime.sh b/oneAPI_ODAV_APP/ENGINES/utils/aws/mime.sh
new file mode 100644
index 000000000..cd595644c
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/aws/mime.sh
@@ -0,0 +1,27 @@
+# AWS EC2 instance startup 'MIME' script https://aws.amazon.com/premiumsupport/knowledge-center/execute-user-data-ec2/
+# This script will run on every instance restart, not only on first start
+# --- DO NOT COPY ABOVE COMMENTS WHEN PASTING INTO USERDATA ---
+
+
+Content-Type: multipart/mixed; boundary="//"
+MIME-Version: 1.0
+
+--//
+Content-Type: text/cloud-config; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="cloud-config.txt"
+
+#cloud-config
+cloud_final_modules:
+- [scripts-user, always]
+
+--//
+Content-Type: text/x-shellscript; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="userdata.txt"
+
+#!/bin/bash
+# --- paste contents of userdata.sh here ---
+--//
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/aws/resume.py b/oneAPI_ODAV_APP/ENGINES/utils/aws/resume.py
new file mode 100644
index 000000000..ce7dcde6f
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/aws/resume.py
@@ -0,0 +1,38 @@
+# Resume all interrupted trainings in yolor/ dir including DDP trainings
+# Usage: $ python utils/aws/resume.py
+
+import os
+import sys
+from pathlib import Path
+
+import torch
+import yaml
+
+
+sys.path.append('./') # to run '$ python *.py' files in subdirectories
+
+port = 0 # --master_port
+path = Path('').resolve()
+for last in path.rglob('*/**/last.pt'):
+ ckpt = torch.load(last)
+ if ckpt['optimizer'] is None:
+ continue
+
+ # Load opt.yaml
+ with open(last.parent.parent / 'opt.yaml') as f:
+ opt = yaml.load(f, Loader=yaml.SafeLoader)
+
+ # Get device count
+ d = opt['device'].split(',') # devices
+ nd = len(d) # number of devices
+ ddp = nd > 1 or (nd == 0 and torch.cuda.device_count() > 1) # distributed data parallel
+
+ if ddp: # multi-GPU
+ port += 1
+ cmd = f'python -m torch.distributed.launch --nproc_per_node {nd} --master_port {port} train.py --resume {last}'
+ else: # single-GPU
+ cmd = f'python train.py --resume {last}'
+
+ cmd += ' > /dev/null 2>&1 &' # redirect output to dev/null and run in daemon thread
+ print(cmd)
+ os.system(cmd)
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/aws/userdata.sh b/oneAPI_ODAV_APP/ENGINES/utils/aws/userdata.sh
new file mode 100644
index 000000000..da731b9f5
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/aws/userdata.sh
@@ -0,0 +1,28 @@
+#!/bin/bash
+# AWS EC2 instance startup script https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/user-data.html
+# This script will run only once on first instance start (for a re-start script see mime.sh)
+# /home/ubuntu (ubuntu) or /home/ec2-user (amazon-linux) is working dir
+# Use >300 GB SSD
+
+
+cd home/ubuntu
+if [ ! -d yolor ]; then
+ echo "Running first-time script." # install dependencies, download COCO, pull Docker
+ git clone -b main https://github.com/WongKinYiu/yolov7 && sudo chmod -R 777 yolov7
+ cd yolov7
+ bash data/scripts/get_coco.sh && echo "Data done." &
+ sudo docker pull nvcr.io/nvidia/pytorch:21.08-py3 && echo "Docker done." &
+ python -m pip install --upgrade pip && pip install -r requirements.txt && python detect.py && echo "Requirements done." &
+ wait && echo "All tasks done." # finish background tasks
+else
+ echo "Running re-start script." # resume interrupted runs
+ i=0
+ list=$(sudo docker ps -qa) # container list i.e. $'one\ntwo\nthree\nfour'
+ while IFS= read -r id; do
+ ((i++))
+ echo "restarting container $i: $id"
+ sudo docker start $id
+ # sudo docker exec -it $id python train.py --resume # single-GPU
+ sudo docker exec -d $id python utils/aws/resume.py # multi-scenario
+ done <<<"$list"
+fi
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/datasets.py b/oneAPI_ODAV_APP/ENGINES/utils/datasets.py
new file mode 100644
index 000000000..d471515ec
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/datasets.py
@@ -0,0 +1,1321 @@
+# Dataset utils and dataloaders
+
+import glob
+import logging
+import math
+import os
+import random
+import shutil
+import time
+from itertools import repeat
+from multiprocessing.pool import ThreadPool
+from pathlib import Path
+from threading import Thread
+
+import cv2
+import numpy as np
+import torch
+import torch.nn.functional as F
+from PIL import Image, ExifTags
+from torch.utils.data import Dataset
+from tqdm import tqdm
+
+import pickle
+from copy import deepcopy
+#from pycocotools import mask as maskUtils
+from torchvision.utils import save_image
+from torchvision.ops import roi_pool, roi_align, ps_roi_pool, ps_roi_align
+
+from utils.general import check_requirements, xyxy2xywh, xywh2xyxy, xywhn2xyxy, xyn2xy, segment2box, segments2boxes, \
+ resample_segments, clean_str
+from utils.torch_utils import torch_distributed_zero_first
+
+
+# Parameters
+help_url = 'https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
+img_formats = ['bmp', 'jpg', 'jpeg', 'png', 'tif', 'tiff', 'dng', 'webp', 'mpo'] # acceptable image suffixes
+vid_formats = ['mov', 'avi', 'mp4', 'mpg', 'mpeg', 'm4v', 'wmv', 'mkv'] # acceptable video suffixes
+logger = logging.getLogger(__name__)
+
+# Get orientation exif tag
+for orientation in ExifTags.TAGS.keys():
+ if ExifTags.TAGS[orientation] == 'Orientation':
+ break
+
+
+def get_hash(files):
+ # Returns a single hash value of a list of files
+ return sum(os.path.getsize(f) for f in files if os.path.isfile(f))
+
+
+def exif_size(img):
+ # Returns exif-corrected PIL size
+ s = img.size # (width, height)
+ try:
+ rotation = dict(img._getexif().items())[orientation]
+ if rotation == 6: # rotation 270
+ s = (s[1], s[0])
+ elif rotation == 8: # rotation 90
+ s = (s[1], s[0])
+ except:
+ pass
+
+ return s
+
+
+def create_dataloader(path, imgsz, batch_size, stride, opt, hyp=None, augment=False, cache=False, pad=0.0, rect=False,
+ rank=-1, world_size=1, workers=8, image_weights=False, quad=False, prefix=''):
+ # Make sure only the first process in DDP process the dataset first, and the following others can use the cache
+ with torch_distributed_zero_first(rank):
+ dataset = LoadImagesAndLabels(path, imgsz, batch_size,
+ augment=augment, # augment images
+ hyp=hyp, # augmentation hyperparameters
+ rect=rect, # rectangular training
+ cache_images=cache,
+ single_cls=opt.single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix)
+
+ batch_size = min(batch_size, len(dataset))
+ nw = min([os.cpu_count() // world_size, batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = torch.utils.data.distributed.DistributedSampler(dataset) if rank != -1 else None
+ loader = torch.utils.data.DataLoader if image_weights else InfiniteDataLoader
+ # Use torch.utils.data.DataLoader() if dataset.properties will update during training else InfiniteDataLoader()
+ dataloader = loader(dataset,
+ batch_size=batch_size,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn)
+ return dataloader, dataset
+
+
+class InfiniteDataLoader(torch.utils.data.dataloader.DataLoader):
+ """ Dataloader that reuses workers
+
+ Uses same syntax as vanilla DataLoader
+ """
+
+ def __init__(self, *args, **kwargs):
+ super().__init__(*args, **kwargs)
+ object.__setattr__(self, 'batch_sampler', _RepeatSampler(self.batch_sampler))
+ self.iterator = super().__iter__()
+
+ def __len__(self):
+ return len(self.batch_sampler.sampler)
+
+ def __iter__(self):
+ for i in range(len(self)):
+ yield next(self.iterator)
+
+
+class _RepeatSampler(object):
+ """ Sampler that repeats forever
+
+ Args:
+ sampler (Sampler)
+ """
+
+ def __init__(self, sampler):
+ self.sampler = sampler
+
+ def __iter__(self):
+ while True:
+ yield from iter(self.sampler)
+
+
+class LoadImages: # for inference
+ def __init__(self, path, img_size=640, stride=32):
+ p = str(Path(path).absolute()) # os-agnostic absolute path
+ if '*' in p:
+ files = sorted(glob.glob(p, recursive=True)) # glob
+ elif os.path.isdir(p):
+ files = sorted(glob.glob(os.path.join(p, '*.*'))) # dir
+ elif os.path.isfile(p):
+ files = [p] # files
+ else:
+ raise Exception(f'ERROR: {p} does not exist')
+
+ images = [x for x in files if x.split('.')[-1].lower() in img_formats]
+ videos = [x for x in files if x.split('.')[-1].lower() in vid_formats]
+ ni, nv = len(images), len(videos)
+
+ self.img_size = img_size
+ self.stride = stride
+ self.files = images + videos
+ self.nf = ni + nv # number of files
+ self.video_flag = [False] * ni + [True] * nv
+ self.mode = 'image'
+ if any(videos):
+ self.new_video(videos[0]) # new video
+ else:
+ self.cap = None
+ assert self.nf > 0, f'No images or videos found in {p}. ' \
+ f'Supported formats are:\nimages: {img_formats}\nvideos: {vid_formats}'
+
+ def __iter__(self):
+ self.count = 0
+ return self
+
+ def __next__(self):
+ if self.count == self.nf:
+ raise StopIteration
+ path = self.files[self.count]
+
+ if self.video_flag[self.count]:
+ # Read video
+ self.mode = 'video'
+ ret_val, img0 = self.cap.read()
+ if not ret_val:
+ self.count += 1
+ self.cap.release()
+ if self.count == self.nf: # last video
+ raise StopIteration
+ else:
+ path = self.files[self.count]
+ self.new_video(path)
+ ret_val, img0 = self.cap.read()
+
+ self.frame += 1
+ print(f'video {self.count + 1}/{self.nf} ({self.frame}/{self.nframes}) {path}: ', end='')
+
+ else:
+ # Read image
+ self.count += 1
+ img0 = cv2.imread(path) # BGR
+ assert img0 is not None, 'Image Not Found ' + path
+ #print(f'image {self.count}/{self.nf} {path}: ', end='')
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return path, img, img0, self.cap
+
+ def new_video(self, path):
+ self.frame = 0
+ self.cap = cv2.VideoCapture(path)
+ self.nframes = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
+
+ def __len__(self):
+ return self.nf # number of files
+
+
+class LoadWebcam: # for inference
+ def __init__(self, pipe='0', img_size=640, stride=32):
+ self.img_size = img_size
+ self.stride = stride
+
+ if pipe.isnumeric():
+ pipe = eval(pipe) # local camera
+ # pipe = 'rtsp://192.168.1.64/1' # IP camera
+ # pipe = 'rtsp://username:password@192.168.1.64/1' # IP camera with login
+ # pipe = 'http://wmccpinetop.axiscam.net/mjpg/video.mjpg' # IP golf camera
+
+ self.pipe = pipe
+ self.cap = cv2.VideoCapture(pipe) # video capture object
+ self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ self.cap.release()
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Read frame
+ if self.pipe == 0: # local camera
+ ret_val, img0 = self.cap.read()
+ img0 = cv2.flip(img0, 1) # flip left-right
+ else: # IP camera
+ n = 0
+ while True:
+ n += 1
+ self.cap.grab()
+ if n % 30 == 0: # skip frames
+ ret_val, img0 = self.cap.retrieve()
+ if ret_val:
+ break
+
+ # Print
+ assert ret_val, f'Camera Error {self.pipe}'
+ img_path = 'webcam.jpg'
+ print(f'webcam {self.count}: ', end='')
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return img_path, img, img0, None
+
+ def __len__(self):
+ return 0
+
+
+class LoadStreams: # multiple IP or RTSP cameras
+ def __init__(self, sources='streams.txt', img_size=640, stride=32):
+ self.mode = 'stream'
+ self.img_size = img_size
+ self.stride = stride
+
+ if os.path.isfile(sources):
+ with open(sources, 'r') as f:
+ sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
+ else:
+ sources = [sources]
+
+ n = len(sources)
+ self.imgs = [None] * n
+ self.sources = [clean_str(x) for x in sources] # clean source names for later
+ for i, s in enumerate(sources):
+ # Start the thread to read frames from the video stream
+ print(f'{i + 1}/{n}: {s}... ', end='')
+ url = eval(s) if s.isnumeric() else s
+ if 'youtube.com/' in str(url) or 'youtu.be/' in str(url): # if source is YouTube video
+ check_requirements(('pafy', 'youtube_dl'))
+ import pafy
+ url = pafy.new(url).getbest(preftype="mp4").url
+ cap = cv2.VideoCapture(url)
+ assert cap.isOpened(), f'Failed to open {s}'
+ w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ self.fps = cap.get(cv2.CAP_PROP_FPS) % 100
+
+ _, self.imgs[i] = cap.read() # guarantee first frame
+ thread = Thread(target=self.update, args=([i, cap]), daemon=True)
+ print(f' success ({w}x{h} at {self.fps:.2f} FPS).')
+ thread.start()
+ print('') # newline
+
+ # check for common shapes
+ s = np.stack([letterbox(x, self.img_size, stride=self.stride)[0].shape for x in self.imgs], 0) # shapes
+ self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
+ if not self.rect:
+ print('WARNING: Different stream shapes detected. For optimal performance supply similarly-shaped streams.')
+
+ def update(self, index, cap):
+ # Read next stream frame in a daemon thread
+ n = 0
+ while cap.isOpened():
+ n += 1
+ # _, self.imgs[index] = cap.read()
+ cap.grab()
+ if n == 4: # read every 4th frame
+ success, im = cap.retrieve()
+ self.imgs[index] = im if success else self.imgs[index] * 0
+ n = 0
+ time.sleep(1 / self.fps) # wait time
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ img0 = self.imgs.copy()
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Letterbox
+ img = [letterbox(x, self.img_size, auto=self.rect, stride=self.stride)[0] for x in img0]
+
+ # Stack
+ img = np.stack(img, 0)
+
+ # Convert
+ img = img[:, :, :, ::-1].transpose(0, 3, 1, 2) # BGR to RGB, to bsx3x416x416
+ img = np.ascontiguousarray(img)
+
+ return self.sources, img, img0, None
+
+ def __len__(self):
+ return 0 # 1E12 frames = 32 streams at 30 FPS for 30 years
+
+
+def img2label_paths(img_paths):
+ # Define label paths as a function of image paths
+ sa, sb = os.sep + 'images' + os.sep, os.sep + 'labels' + os.sep # /images/, /labels/ substrings
+ return ['txt'.join(x.replace(sa, sb, 1).rsplit(x.split('.')[-1], 1)) for x in img_paths]
+
+
+class LoadImagesAndLabels(Dataset): # for training/testing
+ def __init__(self, path, img_size=640, batch_size=16, augment=False, hyp=None, rect=False, image_weights=False,
+ cache_images=False, single_cls=False, stride=32, pad=0.0, prefix=''):
+ self.img_size = img_size
+ self.augment = augment
+ self.hyp = hyp
+ self.image_weights = image_weights
+ self.rect = False if image_weights else rect
+ self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
+ self.mosaic_border = [-img_size // 2, -img_size // 2]
+ self.stride = stride
+ self.path = path
+ #self.albumentations = Albumentations() if augment else None
+
+ try:
+ f = [] # image files
+ for p in path if isinstance(path, list) else [path]:
+ p = Path(p) # os-agnostic
+ if p.is_dir(): # dir
+ f += glob.glob(str(p / '**' / '*.*'), recursive=True)
+ # f = list(p.rglob('**/*.*')) # pathlib
+ elif p.is_file(): # file
+ with open(p, 'r') as t:
+ t = t.read().strip().splitlines()
+ parent = str(p.parent) + os.sep
+ f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
+ # f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
+ else:
+ raise Exception(f'{prefix}{p} does not exist')
+ self.img_files = sorted([x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in img_formats])
+ # self.img_files = sorted([x for x in f if x.suffix[1:].lower() in img_formats]) # pathlib
+ assert self.img_files, f'{prefix}No images found'
+ except Exception as e:
+ raise Exception(f'{prefix}Error loading data from {path}: {e}\nSee {help_url}')
+
+ # Check cache
+ self.label_files = img2label_paths(self.img_files) # labels
+ cache_path = (p if p.is_file() else Path(self.label_files[0]).parent).with_suffix('.cache') # cached labels
+ if cache_path.is_file():
+ cache, exists = torch.load(cache_path), True # load
+ #if cache['hash'] != get_hash(self.label_files + self.img_files) or 'version' not in cache: # changed
+ # cache, exists = self.cache_labels(cache_path, prefix), False # re-cache
+ else:
+ cache, exists = self.cache_labels(cache_path, prefix), False # cache
+
+ # Display cache
+ nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupted, total
+ if exists:
+ d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupted"
+ tqdm(None, desc=prefix + d, total=n, initial=n) # display cache results
+ assert nf > 0 or not augment, f'{prefix}No labels in {cache_path}. Can not train without labels. See {help_url}'
+
+ # Read cache
+ cache.pop('hash') # remove hash
+ cache.pop('version') # remove version
+ labels, shapes, self.segments = zip(*cache.values())
+ self.labels = list(labels)
+ self.shapes = np.array(shapes, dtype=np.float64)
+ self.img_files = list(cache.keys()) # update
+ self.label_files = img2label_paths(cache.keys()) # update
+ if single_cls:
+ for x in self.labels:
+ x[:, 0] = 0
+
+ n = len(shapes) # number of images
+ bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
+ nb = bi[-1] + 1 # number of batches
+ self.batch = bi # batch index of image
+ self.n = n
+ self.indices = range(n)
+
+ # Rectangular Training
+ if self.rect:
+ # Sort by aspect ratio
+ s = self.shapes # wh
+ ar = s[:, 1] / s[:, 0] # aspect ratio
+ irect = ar.argsort()
+ self.img_files = [self.img_files[i] for i in irect]
+ self.label_files = [self.label_files[i] for i in irect]
+ self.labels = [self.labels[i] for i in irect]
+ self.shapes = s[irect] # wh
+ ar = ar[irect]
+
+ # Set training image shapes
+ shapes = [[1, 1]] * nb
+ for i in range(nb):
+ ari = ar[bi == i]
+ mini, maxi = ari.min(), ari.max()
+ if maxi < 1:
+ shapes[i] = [maxi, 1]
+ elif mini > 1:
+ shapes[i] = [1, 1 / mini]
+
+ self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(np.int) * stride
+
+ # Cache images into memory for faster training (WARNING: large datasets may exceed system RAM)
+ self.imgs = [None] * n
+ if cache_images:
+ if cache_images == 'disk':
+ self.im_cache_dir = Path(Path(self.img_files[0]).parent.as_posix() + '_npy')
+ self.img_npy = [self.im_cache_dir / Path(f).with_suffix('.npy').name for f in self.img_files]
+ self.im_cache_dir.mkdir(parents=True, exist_ok=True)
+ gb = 0 # Gigabytes of cached images
+ self.img_hw0, self.img_hw = [None] * n, [None] * n
+ results = ThreadPool(8).imap(lambda x: load_image(*x), zip(repeat(self), range(n)))
+ pbar = tqdm(enumerate(results), total=n)
+ for i, x in pbar:
+ if cache_images == 'disk':
+ if not self.img_npy[i].exists():
+ np.save(self.img_npy[i].as_posix(), x[0])
+ gb += self.img_npy[i].stat().st_size
+ else:
+ self.imgs[i], self.img_hw0[i], self.img_hw[i] = x
+ gb += self.imgs[i].nbytes
+ pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB)'
+ pbar.close()
+
+ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
+ # Cache dataset labels, check images and read shapes
+ x = {} # dict
+ nm, nf, ne, nc = 0, 0, 0, 0 # number missing, found, empty, duplicate
+ pbar = tqdm(zip(self.img_files, self.label_files), desc='Scanning images', total=len(self.img_files))
+ for i, (im_file, lb_file) in enumerate(pbar):
+ try:
+ # verify images
+ im = Image.open(im_file)
+ im.verify() # PIL verify
+ shape = exif_size(im) # image size
+ segments = [] # instance segments
+ assert (shape[0] > 9) & (shape[1] > 9), f'image size {shape} <10 pixels'
+ assert im.format.lower() in img_formats, f'invalid image format {im.format}'
+
+ # verify labels
+ if os.path.isfile(lb_file):
+ nf += 1 # label found
+ with open(lb_file, 'r') as f:
+ l = [x.split() for x in f.read().strip().splitlines()]
+ if any([len(x) > 8 for x in l]): # is segment
+ classes = np.array([x[0] for x in l], dtype=np.float32)
+ segments = [np.array(x[1:], dtype=np.float32).reshape(-1, 2) for x in l] # (cls, xy1...)
+ l = np.concatenate((classes.reshape(-1, 1), segments2boxes(segments)), 1) # (cls, xywh)
+ l = np.array(l, dtype=np.float32)
+ if len(l):
+ assert l.shape[1] == 5, 'labels require 5 columns each'
+ assert (l >= 0).all(), 'negative labels'
+ assert (l[:, 1:] <= 1).all(), 'non-normalized or out of bounds coordinate labels'
+ assert np.unique(l, axis=0).shape[0] == l.shape[0], 'duplicate labels'
+ else:
+ ne += 1 # label empty
+ l = np.zeros((0, 5), dtype=np.float32)
+ else:
+ nm += 1 # label missing
+ l = np.zeros((0, 5), dtype=np.float32)
+ x[im_file] = [l, shape, segments]
+ except Exception as e:
+ nc += 1
+ print(f'{prefix}WARNING: Ignoring corrupted image and/or label {im_file}: {e}')
+
+ pbar.desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels... " \
+ f"{nf} found, {nm} missing, {ne} empty, {nc} corrupted"
+ pbar.close()
+
+ if nf == 0:
+ print(f'{prefix}WARNING: No labels found in {path}. See {help_url}')
+
+ x['hash'] = get_hash(self.label_files + self.img_files)
+ x['results'] = nf, nm, ne, nc, i + 1
+ x['version'] = 0.1 # cache version
+ torch.save(x, path) # save for next time
+ logging.info(f'{prefix}New cache created: {path}')
+ return x
+
+ def __len__(self):
+ return len(self.img_files)
+
+ # def __iter__(self):
+ # self.count = -1
+ # print('ran dataset iter')
+ # #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
+ # return self
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ if mosaic:
+ # Load mosaic
+ if random.random() < 0.8:
+ img, labels = load_mosaic(self, index)
+ else:
+ img, labels = load_mosaic9(self, index)
+ shapes = None
+
+ # MixUp https://arxiv.org/pdf/1710.09412.pdf
+ if random.random() < hyp['mixup']:
+ if random.random() < 0.8:
+ img2, labels2 = load_mosaic(self, random.randint(0, len(self.labels) - 1))
+ else:
+ img2, labels2 = load_mosaic9(self, random.randint(0, len(self.labels) - 1))
+ r = np.random.beta(8.0, 8.0) # mixup ratio, alpha=beta=8.0
+ img = (img * r + img2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = load_image(self, index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ # Augment imagespace
+ if not mosaic:
+ img, labels = random_perspective(img, labels,
+ degrees=hyp['degrees'],
+ translate=hyp['translate'],
+ scale=hyp['scale'],
+ shear=hyp['shear'],
+ perspective=hyp['perspective'])
+
+
+ #img, labels = self.albumentations(img, labels)
+
+ # Augment colorspace
+ augment_hsv(img, hgain=hyp['hsv_h'], sgain=hyp['hsv_s'], vgain=hyp['hsv_v'])
+
+ # Apply cutouts
+ # if random.random() < 0.9:
+ # labels = cutout(img, labels)
+
+ if random.random() < hyp['paste_in']:
+ sample_labels, sample_images, sample_masks = [], [], []
+ while len(sample_labels) < 30:
+ sample_labels_, sample_images_, sample_masks_ = load_samples(self, random.randint(0, len(self.labels) - 1))
+ sample_labels += sample_labels_
+ sample_images += sample_images_
+ sample_masks += sample_masks_
+ #print(len(sample_labels))
+ if len(sample_labels) == 0:
+ break
+ labels = pastein(img, labels, sample_labels, sample_images, sample_masks)
+
+ nL = len(labels) # number of labels
+ if nL:
+ labels[:, 1:5] = xyxy2xywh(labels[:, 1:5]) # convert xyxy to xywh
+ labels[:, [2, 4]] /= img.shape[0] # normalized height 0-1
+ labels[:, [1, 3]] /= img.shape[1] # normalized width 0-1
+
+ if self.augment:
+ # flip up-down
+ if random.random() < hyp['flipud']:
+ img = np.flipud(img)
+ if nL:
+ labels[:, 2] = 1 - labels[:, 2]
+
+ # flip left-right
+ if random.random() < hyp['fliplr']:
+ img = np.fliplr(img)
+ if nL:
+ labels[:, 1] = 1 - labels[:, 1]
+
+ labels_out = torch.zeros((nL, 6))
+ if nL:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return torch.from_numpy(img), labels_out, self.img_files[index], shapes
+
+ @staticmethod
+ def collate_fn(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ for i, l in enumerate(label):
+ l[:, 0] = i # add target image index for build_targets()
+ return torch.stack(img, 0), torch.cat(label, 0), path, shapes
+
+ @staticmethod
+ def collate_fn4(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ n = len(shapes) // 4
+ img4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
+
+ ho = torch.tensor([[0., 0, 0, 1, 0, 0]])
+ wo = torch.tensor([[0., 0, 1, 0, 0, 0]])
+ s = torch.tensor([[1, 1, .5, .5, .5, .5]]) # scale
+ for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
+ i *= 4
+ if random.random() < 0.5:
+ im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2., mode='bilinear', align_corners=False)[
+ 0].type(img[i].type())
+ l = label[i]
+ else:
+ im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
+ l = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
+ img4.append(im)
+ label4.append(l)
+
+ for i, l in enumerate(label4):
+ l[:, 0] = i # add target image index for build_targets()
+
+ return torch.stack(img4, 0), torch.cat(label4, 0), path4, shapes4
+
+
+# Ancillary functions --------------------------------------------------------------------------------------------------
+def load_image(self, index):
+ # loads 1 image from dataset, returns img, original hw, resized hw
+ img = self.imgs[index]
+ if img is None: # not cached
+ path = self.img_files[index]
+ img = cv2.imread(path) # BGR
+ assert img is not None, 'Image Not Found ' + path
+ h0, w0 = img.shape[:2] # orig hw
+ r = self.img_size / max(h0, w0) # resize image to img_size
+ if r != 1: # always resize down, only resize up if training with augmentation
+ interp = cv2.INTER_AREA if r < 1 and not self.augment else cv2.INTER_LINEAR
+ img = cv2.resize(img, (int(w0 * r), int(h0 * r)), interpolation=interp)
+ return img, (h0, w0), img.shape[:2] # img, hw_original, hw_resized
+ else:
+ return self.imgs[index], self.img_hw0[index], self.img_hw[index] # img, hw_original, hw_resized
+
+
+def augment_hsv(img, hgain=0.5, sgain=0.5, vgain=0.5):
+ r = np.random.uniform(-1, 1, 3) * [hgain, sgain, vgain] + 1 # random gains
+ hue, sat, val = cv2.split(cv2.cvtColor(img, cv2.COLOR_BGR2HSV))
+ dtype = img.dtype # uint8
+
+ x = np.arange(0, 256, dtype=np.int16)
+ lut_hue = ((x * r[0]) % 180).astype(dtype)
+ lut_sat = np.clip(x * r[1], 0, 255).astype(dtype)
+ lut_val = np.clip(x * r[2], 0, 255).astype(dtype)
+
+ img_hsv = cv2.merge((cv2.LUT(hue, lut_hue), cv2.LUT(sat, lut_sat), cv2.LUT(val, lut_val))).astype(dtype)
+ cv2.cvtColor(img_hsv, cv2.COLOR_HSV2BGR, dst=img) # no return needed
+
+
+def hist_equalize(img, clahe=True, bgr=False):
+ # Equalize histogram on BGR image 'img' with img.shape(n,m,3) and range 0-255
+ yuv = cv2.cvtColor(img, cv2.COLOR_BGR2YUV if bgr else cv2.COLOR_RGB2YUV)
+ if clahe:
+ c = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
+ yuv[:, :, 0] = c.apply(yuv[:, :, 0])
+ else:
+ yuv[:, :, 0] = cv2.equalizeHist(yuv[:, :, 0]) # equalize Y channel histogram
+ return cv2.cvtColor(yuv, cv2.COLOR_YUV2BGR if bgr else cv2.COLOR_YUV2RGB) # convert YUV image to RGB
+
+
+def load_mosaic(self, index):
+ # loads images in a 4-mosaic
+
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ #img4, labels4, segments4 = remove_background(img4, labels4, segments4)
+ #sample_segments(img4, labels4, segments4, probability=self.hyp['copy_paste'])
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, probability=self.hyp['copy_paste'])
+ img4, labels4 = random_perspective(img4, labels4, segments4,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img4, labels4
+
+
+def load_mosaic9(self, index):
+ # loads images in a 9-mosaic
+
+ labels9, segments9 = [], []
+ s = self.img_size
+ indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img9
+ if i == 0: # center
+ img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ h0, w0 = h, w
+ c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
+ elif i == 1: # top
+ c = s, s - h, s + w, s
+ elif i == 2: # top right
+ c = s + wp, s - h, s + wp + w, s
+ elif i == 3: # right
+ c = s + w0, s, s + w0 + w, s + h
+ elif i == 4: # bottom right
+ c = s + w0, s + hp, s + w0 + w, s + hp + h
+ elif i == 5: # bottom
+ c = s + w0 - w, s + h0, s + w0, s + h0 + h
+ elif i == 6: # bottom left
+ c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
+ elif i == 7: # left
+ c = s - w, s + h0 - h, s, s + h0
+ elif i == 8: # top left
+ c = s - w, s + h0 - hp - h, s, s + h0 - hp
+
+ padx, pady = c[:2]
+ x1, y1, x2, y2 = [max(x, 0) for x in c] # allocate coords
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
+ labels9.append(labels)
+ segments9.extend(segments)
+
+ # Image
+ img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
+ hp, wp = h, w # height, width previous
+
+ # Offset
+ yc, xc = [int(random.uniform(0, s)) for _ in self.mosaic_border] # mosaic center x, y
+ img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
+
+ # Concat/clip labels
+ labels9 = np.concatenate(labels9, 0)
+ labels9[:, [1, 3]] -= xc
+ labels9[:, [2, 4]] -= yc
+ c = np.array([xc, yc]) # centers
+ segments9 = [x - c for x in segments9]
+
+ for x in (labels9[:, 1:], *segments9):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img9, labels9 = replicate(img9, labels9) # replicate
+
+ # Augment
+ #img9, labels9, segments9 = remove_background(img9, labels9, segments9)
+ img9, labels9, segments9 = copy_paste(img9, labels9, segments9, probability=self.hyp['copy_paste'])
+ img9, labels9 = random_perspective(img9, labels9, segments9,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img9, labels9
+
+
+def load_samples(self, index):
+ # loads images in a 4-mosaic
+
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ #img4, labels4, segments4 = remove_background(img4, labels4, segments4)
+ sample_labels, sample_images, sample_masks = sample_segments(img4, labels4, segments4, probability=0.5)
+
+ return sample_labels, sample_images, sample_masks
+
+
+def copy_paste(img, labels, segments, probability=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ if probability and n:
+ h, w, c = img.shape # height, width, channels
+ im_new = np.zeros(img.shape, np.uint8)
+ for j in random.sample(range(n), k=round(probability * n)):
+ l, s = labels[j], segments[j]
+ box = w - l[3], l[2], w - l[1], l[4]
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
+ labels = np.concatenate((labels, [[l[0], *box]]), 0)
+ segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=img, src2=im_new)
+ result = cv2.flip(result, 1) # augment segments (flip left-right)
+ i = result > 0 # pixels to replace
+ # i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
+ img[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+
+ return img, labels, segments
+
+
+def remove_background(img, labels, segments):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ h, w, c = img.shape # height, width, channels
+ im_new = np.zeros(img.shape, np.uint8)
+ img_new = np.ones(img.shape, np.uint8) * 114
+ for j in range(n):
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=img, src2=im_new)
+
+ i = result > 0 # pixels to replace
+ img_new[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+
+ return img_new, labels, segments
+
+
+def sample_segments(img, labels, segments, probability=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ sample_labels = []
+ sample_images = []
+ sample_masks = []
+ if probability and n:
+ h, w, c = img.shape # height, width, channels
+ for j in random.sample(range(n), k=round(probability * n)):
+ l, s = labels[j], segments[j]
+ box = l[1].astype(int).clip(0,w-1), l[2].astype(int).clip(0,h-1), l[3].astype(int).clip(0,w-1), l[4].astype(int).clip(0,h-1)
+
+ #print(box)
+ if (box[2] <= box[0]) or (box[3] <= box[1]):
+ continue
+
+ sample_labels.append(l[0])
+
+ mask = np.zeros(img.shape, np.uint8)
+
+ cv2.drawContours(mask, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+ sample_masks.append(mask[box[1]:box[3],box[0]:box[2],:])
+
+ result = cv2.bitwise_and(src1=img, src2=mask)
+ i = result > 0 # pixels to replace
+ mask[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+ #print(box)
+ sample_images.append(mask[box[1]:box[3],box[0]:box[2],:])
+
+ return sample_labels, sample_images, sample_masks
+
+
+def replicate(img, labels):
+ # Replicate labels
+ h, w = img.shape[:2]
+ boxes = labels[:, 1:].astype(int)
+ x1, y1, x2, y2 = boxes.T
+ s = ((x2 - x1) + (y2 - y1)) / 2 # side length (pixels)
+ for i in s.argsort()[:round(s.size * 0.5)]: # smallest indices
+ x1b, y1b, x2b, y2b = boxes[i]
+ bh, bw = y2b - y1b, x2b - x1b
+ yc, xc = int(random.uniform(0, h - bh)), int(random.uniform(0, w - bw)) # offset x, y
+ x1a, y1a, x2a, y2a = [xc, yc, xc + bw, yc + bh]
+ img[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ labels = np.append(labels, [[labels[i, 0], x1a, y1a, x2a, y2a]], axis=0)
+
+ return img, labels
+
+
+def letterbox(img, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
+ # Resize and pad image while meeting stride-multiple constraints
+ shape = img.shape[:2] # current shape [height, width]
+ if isinstance(new_shape, int):
+ new_shape = (new_shape, new_shape)
+
+ # Scale ratio (new / old)
+ r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
+ if not scaleup: # only scale down, do not scale up (for better test mAP)
+ r = min(r, 1.0)
+
+ # Compute padding
+ ratio = r, r # width, height ratios
+ new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
+ dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
+ if auto: # minimum rectangle
+ dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
+ elif scaleFill: # stretch
+ dw, dh = 0.0, 0.0
+ new_unpad = (new_shape[1], new_shape[0])
+ ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
+
+ dw /= 2 # divide padding into 2 sides
+ dh /= 2
+
+ if shape[::-1] != new_unpad: # resize
+ img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
+ top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
+ left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
+ img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
+ return img, ratio, (dw, dh)
+
+
+def random_perspective(img, targets=(), segments=(), degrees=10, translate=.1, scale=.1, shear=10, perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = img.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = img.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -img.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -img.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1.1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
+ T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ img = cv2.warpPerspective(img, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ img = cv2.warpAffine(img, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(img[:, :, ::-1]) # base
+ # ax[1].imshow(img2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ if n:
+ use_segments = any(x.any() for x in segments)
+ new = np.zeros((n, 4))
+ if use_segments: # warp segments
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+
+ else: # warp boxes
+ xy = np.ones((n * 4, 3))
+ xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
+
+ # create new boxes
+ x = xy[:, [0, 2, 4, 6]]
+ y = xy[:, [1, 3, 5, 7]]
+ new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
+
+ # clip
+ new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
+ new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+
+ return img, targets
+
+
+def box_candidates(box1, box2, wh_thr=2, ar_thr=20, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
+ # Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
+ w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
+ w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
+ ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
+ return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
+
+
+def bbox_ioa(box1, box2):
+ # Returns the intersection over box2 area given box1, box2. box1 is 4, box2 is nx4. boxes are x1y1x2y2
+ box2 = box2.transpose()
+
+ # Get the coordinates of bounding boxes
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+
+ # Intersection area
+ inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
+ (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)
+
+ # box2 area
+ box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + 1e-16
+
+ # Intersection over box2 area
+ return inter_area / box2_area
+
+
+def cutout(image, labels):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ h, w = image.shape[:2]
+
+ # create random masks
+ scales = [0.5] * 1 + [0.25] * 2 + [0.125] * 4 + [0.0625] * 8 + [0.03125] * 16 # image size fraction
+ for s in scales:
+ mask_h = random.randint(1, int(h * s))
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ # apply random color mask
+ image[ymin:ymax, xmin:xmax] = [random.randint(64, 191) for _ in range(3)]
+
+ # return unobscured labels
+ if len(labels) and s > 0.03:
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ labels = labels[ioa < 0.60] # remove >60% obscured labels
+
+ return labels
+
+
+def pastein(image, labels, sample_labels, sample_images, sample_masks):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ h, w = image.shape[:2]
+
+ # create random masks
+ scales = [0.75] * 2 + [0.5] * 4 + [0.25] * 4 + [0.125] * 4 + [0.0625] * 6 # image size fraction
+ for s in scales:
+ if random.random() < 0.2:
+ continue
+ mask_h = random.randint(1, int(h * s))
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ if len(labels):
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ else:
+ ioa = np.zeros(1)
+
+ if (ioa < 0.30).all() and len(sample_labels) and (xmax > xmin+20) and (ymax > ymin+20): # allow 30% obscuration of existing labels
+ sel_ind = random.randint(0, len(sample_labels)-1)
+ #print(len(sample_labels))
+ #print(sel_ind)
+ #print((xmax-xmin, ymax-ymin))
+ #print(image[ymin:ymax, xmin:xmax].shape)
+ #print([[sample_labels[sel_ind], *box]])
+ #print(labels.shape)
+ hs, ws, cs = sample_images[sel_ind].shape
+ r_scale = min((ymax-ymin)/hs, (xmax-xmin)/ws)
+ r_w = int(ws*r_scale)
+ r_h = int(hs*r_scale)
+
+ if (r_w > 10) and (r_h > 10):
+ r_mask = cv2.resize(sample_masks[sel_ind], (r_w, r_h))
+ r_image = cv2.resize(sample_images[sel_ind], (r_w, r_h))
+ temp_crop = image[ymin:ymin+r_h, xmin:xmin+r_w]
+ m_ind = r_mask > 0
+ if m_ind.astype(np.int).sum() > 60:
+ temp_crop[m_ind] = r_image[m_ind]
+ #print(sample_labels[sel_ind])
+ #print(sample_images[sel_ind].shape)
+ #print(temp_crop.shape)
+ box = np.array([xmin, ymin, xmin+r_w, ymin+r_h], dtype=np.float32)
+ if len(labels):
+ labels = np.concatenate((labels, [[sample_labels[sel_ind], *box]]), 0)
+ else:
+ labels = np.array([[sample_labels[sel_ind], *box]])
+
+ image[ymin:ymin+r_h, xmin:xmin+r_w] = temp_crop
+
+ return labels
+
+class Albumentations:
+ # YOLOv5 Albumentations class (optional, only used if package is installed)
+ def __init__(self):
+ self.transform = None
+ import albumentations as A
+
+ self.transform = A.Compose([
+ A.CLAHE(p=0.01),
+ A.RandomBrightnessContrast(brightness_limit=0.2, contrast_limit=0.2, p=0.01),
+ A.RandomGamma(gamma_limit=[80, 120], p=0.01),
+ A.Blur(p=0.01),
+ A.MedianBlur(p=0.01),
+ A.ToGray(p=0.01),
+ A.ImageCompression(quality_lower=75, p=0.01),],
+ bbox_params=A.BboxParams(format='pascal_voc', label_fields=['class_labels']))
+
+ #logging.info(colorstr('albumentations: ') + ', '.join(f'{x}' for x in self.transform.transforms if x.p))
+
+ def __call__(self, im, labels, p=1.0):
+ if self.transform and random.random() < p:
+ new = self.transform(image=im, bboxes=labels[:, 1:], class_labels=labels[:, 0]) # transformed
+ im, labels = new['image'], np.array([[c, *b] for c, b in zip(new['class_labels'], new['bboxes'])])
+ return im, labels
+
+
+def create_folder(path='./new'):
+ # Create folder
+ if os.path.exists(path):
+ shutil.rmtree(path) # delete output folder
+ os.makedirs(path) # make new output folder
+
+
+def flatten_recursive(path='../coco'):
+ # Flatten a recursive directory by bringing all files to top level
+ new_path = Path(path + '_flat')
+ create_folder(new_path)
+ for file in tqdm(glob.glob(str(Path(path)) + '/**/*.*', recursive=True)):
+ shutil.copyfile(file, new_path / Path(file).name)
+
+
+def extract_boxes(path='../coco/'): # from utils.datasets import *; extract_boxes('../coco128')
+ # Convert detection dataset into classification dataset, with one directory per class
+
+ path = Path(path) # images dir
+ shutil.rmtree(path / 'classifier') if (path / 'classifier').is_dir() else None # remove existing
+ files = list(path.rglob('*.*'))
+ n = len(files) # number of files
+ for im_file in tqdm(files, total=n):
+ if im_file.suffix[1:] in img_formats:
+ # image
+ im = cv2.imread(str(im_file))[..., ::-1] # BGR to RGB
+ h, w = im.shape[:2]
+
+ # labels
+ lb_file = Path(img2label_paths([str(im_file)])[0])
+ if Path(lb_file).exists():
+ with open(lb_file, 'r') as f:
+ lb = np.array([x.split() for x in f.read().strip().splitlines()], dtype=np.float32) # labels
+
+ for j, x in enumerate(lb):
+ c = int(x[0]) # class
+ f = (path / 'classifier') / f'{c}' / f'{path.stem}_{im_file.stem}_{j}.jpg' # new filename
+ if not f.parent.is_dir():
+ f.parent.mkdir(parents=True)
+
+ b = x[1:] * [w, h, w, h] # box
+ # b[2:] = b[2:].max() # rectangle to square
+ b[2:] = b[2:] * 1.2 + 3 # pad
+ b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
+
+ b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
+ b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
+ assert cv2.imwrite(str(f), im[b[1]:b[3], b[0]:b[2]]), f'box failure in {f}'
+
+
+def autosplit(path='../coco', weights=(0.9, 0.1, 0.0), annotated_only=False):
+ """ Autosplit a dataset into train/val/test splits and save path/autosplit_*.txt files
+ Usage: from utils.datasets import *; autosplit('../coco')
+ Arguments
+ path: Path to images directory
+ weights: Train, val, test weights (list)
+ annotated_only: Only use images with an annotated txt file
+ """
+ path = Path(path) # images dir
+ files = sum([list(path.rglob(f"*.{img_ext}")) for img_ext in img_formats], []) # image files only
+ n = len(files) # number of files
+ indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
+
+ txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
+ [(path / x).unlink() for x in txt if (path / x).exists()] # remove existing
+
+ print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
+ for i, img in tqdm(zip(indices, files), total=n):
+ if not annotated_only or Path(img2label_paths([str(img)])[0]).exists(): # check label
+ with open(path / txt[i], 'a') as f:
+ f.write(str(img) + '\n') # add image to txt file
+
+
+def load_segmentations(self, index):
+ key = '/work/handsomejw66/coco17/' + self.img_files[index]
+ #print(key)
+ # /work/handsomejw66/coco17/
+ return self.segs[key]
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/general.py b/oneAPI_ODAV_APP/ENGINES/utils/general.py
new file mode 100644
index 000000000..cca7a97eb
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/general.py
@@ -0,0 +1,893 @@
+# YOLOR general utils
+
+import glob
+import logging
+import math
+import os
+import platform
+import random
+import re
+import subprocess
+import time
+from pathlib import Path
+
+import cv2
+import numpy as np
+import pandas as pd
+import torch
+import torchvision
+import yaml
+
+from utils.google_utils import gsutil_getsize
+from utils.metrics import fitness
+from utils.torch_utils import init_torch_seeds
+
+
+# Settings
+torch.set_printoptions(linewidth=320, precision=5, profile='long')
+np.set_printoptions(linewidth=320, formatter={'float_kind': '{:11.5g}'.format}) # format short g, %precision=5
+pd.options.display.max_columns = 10
+cv2.setNumThreads(0) # prevent OpenCV from multithreading (incompatible with PyTorch DataLoader)
+os.environ['NUMEXPR_MAX_THREADS'] = str(min(os.cpu_count(), 8)) # NumExpr max threads
+
+
+def set_logging(rank=-1):
+ logging.basicConfig(
+ format="%(message)s",
+ level=logging.INFO if rank in [-1, 0] else logging.WARN)
+
+
+def init_seeds(seed=0):
+ # Initialize random number generator (RNG) seeds
+ random.seed(seed)
+ np.random.seed(seed)
+ init_torch_seeds(seed)
+
+
+def get_latest_run(search_dir='.'):
+ # Return path to most recent 'last.pt' in /runs (i.e. to --resume from)
+ last_list = glob.glob(f'{search_dir}/**/last*.pt', recursive=True)
+ return max(last_list, key=os.path.getctime) if last_list else ''
+
+
+def isdocker():
+ # Is environment a Docker container
+ return Path('/workspace').exists() # or Path('/.dockerenv').exists()
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+def check_online():
+ # Check internet connectivity
+ import socket
+ try:
+ socket.create_connection(("1.1.1.1", 443), 5) # check host accesability
+ return True
+ except OSError:
+ return False
+
+
+def check_git_status():
+ # Recommend 'git pull' if code is out of date
+ print(colorstr('github: '), end='')
+ try:
+ assert Path('.git').exists(), 'skipping check (not a git repository)'
+ assert not isdocker(), 'skipping check (Docker image)'
+ assert check_online(), 'skipping check (offline)'
+
+ cmd = 'git fetch && git config --get remote.origin.url'
+ url = subprocess.check_output(cmd, shell=True).decode().strip().rstrip('.git') # github repo url
+ branch = subprocess.check_output('git rev-parse --abbrev-ref HEAD', shell=True).decode().strip() # checked out
+ n = int(subprocess.check_output(f'git rev-list {branch}..origin/master --count', shell=True)) # commits behind
+ if n > 0:
+ s = f"⚠️ WARNING: code is out of date by {n} commit{'s' * (n > 1)}. " \
+ f"Use 'git pull' to update or 'git clone {url}' to download latest."
+ else:
+ s = f'up to date with {url} ✅'
+ print(emojis(s)) # emoji-safe
+ except Exception as e:
+ print(e)
+
+
+def check_requirements(requirements='requirements.txt', exclude=()):
+ # Check installed dependencies meet requirements (pass *.txt file or list of packages)
+ import pkg_resources as pkg
+ prefix = colorstr('red', 'bold', 'requirements:')
+ if isinstance(requirements, (str, Path)): # requirements.txt file
+ file = Path(requirements)
+ if not file.exists():
+ print(f"{prefix} {file.resolve()} not found, check failed.")
+ return
+ requirements = [f'{x.name}{x.specifier}' for x in pkg.parse_requirements(file.open()) if x.name not in exclude]
+ else: # list or tuple of packages
+ requirements = [x for x in requirements if x not in exclude]
+
+ n = 0 # number of packages updates
+ for r in requirements:
+ try:
+ pkg.require(r)
+ except Exception as e: # DistributionNotFound or VersionConflict if requirements not met
+ n += 1
+ print(f"{prefix} {e.req} not found and is required by YOLOR, attempting auto-update...")
+ print(subprocess.check_output(f"pip install '{e.req}'", shell=True).decode())
+
+ if n: # if packages updated
+ source = file.resolve() if 'file' in locals() else requirements
+ s = f"{prefix} {n} package{'s' * (n > 1)} updated per {source}\n" \
+ f"{prefix} ⚠️ {colorstr('bold', 'Restart runtime or rerun command for updates to take effect')}\n"
+ print(emojis(s)) # emoji-safe
+
+
+def check_img_size(img_size, s=32):
+ # Verify img_size is a multiple of stride s
+ new_size = make_divisible(img_size, int(s)) # ceil gs-multiple
+ if new_size != img_size:
+ print('WARNING: --img-size %g must be multiple of max stride %g, updating to %g' % (img_size, s, new_size))
+ return new_size
+
+
+def check_imshow():
+ # Check if environment supports image displays
+ try:
+ assert not isdocker(), 'cv2.imshow() is disabled in Docker environments'
+ cv2.imshow('test', np.zeros((1, 1, 3)))
+ cv2.waitKey(1)
+ cv2.destroyAllWindows()
+ cv2.waitKey(1)
+ return True
+ except Exception as e:
+ print(f'WARNING: Environment does not support cv2.imshow() or PIL Image.show() image displays\n{e}')
+ return False
+
+
+def check_file(file):
+ # Search for file if not found
+ if Path(file).is_file() or file == '':
+ return file
+ else:
+ files = glob.glob('./**/' + file, recursive=True) # find file
+ assert len(files), f'File Not Found: {file}' # assert file was found
+ assert len(files) == 1, f"Multiple files match '{file}', specify exact path: {files}" # assert unique
+ return files[0] # return file
+
+
+def check_dataset(dict):
+ # Download dataset if not found locally
+ val, s = dict.get('val'), dict.get('download')
+ if val and len(val):
+ val = [Path(x).resolve() for x in (val if isinstance(val, list) else [val])] # val path
+ if not all(x.exists() for x in val):
+ print('\nWARNING: Dataset not found, nonexistent paths: %s' % [str(x) for x in val if not x.exists()])
+ if s and len(s): # download script
+ print('Downloading %s ...' % s)
+ if s.startswith('http') and s.endswith('.zip'): # URL
+ f = Path(s).name # filename
+ torch.hub.download_url_to_file(s, f)
+ r = os.system('unzip -q %s -d ../ && rm %s' % (f, f)) # unzip
+ else: # bash script
+ r = os.system(s)
+ print('Dataset autodownload %s\n' % ('success' if r == 0 else 'failure')) # analyze return value
+ else:
+ raise Exception('Dataset not found.')
+
+
+def make_divisible(x, divisor):
+ # Returns x evenly divisible by divisor
+ return math.ceil(x / divisor) * divisor
+
+
+def clean_str(s):
+ # Cleans a string by replacing special characters with underscore _
+ return re.sub(pattern="[|@#!¡·$€%&()=?¿^*;:,¨´><+]", repl="_", string=s)
+
+
+def one_cycle(y1=0.0, y2=1.0, steps=100):
+ # lambda function for sinusoidal ramp from y1 to y2
+ return lambda x: ((1 - math.cos(x * math.pi / steps)) / 2) * (y2 - y1) + y1
+
+
+def colorstr(*input):
+ # Colors a string https://en.wikipedia.org/wiki/ANSI_escape_code, i.e. colorstr('blue', 'hello world')
+ *args, string = input if len(input) > 1 else ('blue', 'bold', input[0]) # color arguments, string
+ colors = {'black': '\033[30m', # basic colors
+ 'red': '\033[31m',
+ 'green': '\033[32m',
+ 'yellow': '\033[33m',
+ 'blue': '\033[34m',
+ 'magenta': '\033[35m',
+ 'cyan': '\033[36m',
+ 'white': '\033[37m',
+ 'bright_black': '\033[90m', # bright colors
+ 'bright_red': '\033[91m',
+ 'bright_green': '\033[92m',
+ 'bright_yellow': '\033[93m',
+ 'bright_blue': '\033[94m',
+ 'bright_magenta': '\033[95m',
+ 'bright_cyan': '\033[96m',
+ 'bright_white': '\033[97m',
+ 'end': '\033[0m', # misc
+ 'bold': '\033[1m',
+ 'underline': '\033[4m'}
+ return ''.join(colors[x] for x in args) + f'{string}' + colors['end']
+
+
+def labels_to_class_weights(labels, nc=80):
+ # Get class weights (inverse frequency) from training labels
+ if labels[0] is None: # no labels loaded
+ return torch.Tensor()
+
+ labels = np.concatenate(labels, 0) # labels.shape = (866643, 5) for COCO
+ classes = labels[:, 0].astype(np.int) # labels = [class xywh]
+ weights = np.bincount(classes, minlength=nc) # occurrences per class
+
+ # Prepend gridpoint count (for uCE training)
+ # gpi = ((320 / 32 * np.array([1, 2, 4])) ** 2 * 3).sum() # gridpoints per image
+ # weights = np.hstack([gpi * len(labels) - weights.sum() * 9, weights * 9]) ** 0.5 # prepend gridpoints to start
+
+ weights[weights == 0] = 1 # replace empty bins with 1
+ weights = 1 / weights # number of targets per class
+ weights /= weights.sum() # normalize
+ return torch.from_numpy(weights)
+
+
+def labels_to_image_weights(labels, nc=80, class_weights=np.ones(80)):
+ # Produces image weights based on class_weights and image contents
+ class_counts = np.array([np.bincount(x[:, 0].astype(np.int), minlength=nc) for x in labels])
+ image_weights = (class_weights.reshape(1, nc) * class_counts).sum(1)
+ # index = random.choices(range(n), weights=image_weights, k=1) # weight image sample
+ return image_weights
+
+
+def coco80_to_coco91_class(): # converts 80-index (val2014) to 91-index (paper)
+ # https://tech.amikelive.com/node-718/what-object-categories-labels-are-in-coco-dataset/
+ # a = np.loadtxt('data/coco.names', dtype='str', delimiter='\n')
+ # b = np.loadtxt('data/coco_paper.names', dtype='str', delimiter='\n')
+ # x1 = [list(a[i] == b).index(True) + 1 for i in range(80)] # darknet to coco
+ # x2 = [list(b[i] == a).index(True) if any(b[i] == a) else None for i in range(91)] # coco to darknet
+ x = [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 27, 28, 31, 32, 33, 34,
+ 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63,
+ 64, 65, 67, 70, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 84, 85, 86, 87, 88, 89, 90]
+ return x
+
+
+def xyxy2xywh(x):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = (x[:, 0] + x[:, 2]) / 2 # x center
+ y[:, 1] = (x[:, 1] + x[:, 3]) / 2 # y center
+ y[:, 2] = x[:, 2] - x[:, 0] # width
+ y[:, 3] = x[:, 3] - x[:, 1] # height
+ return y
+
+
+def xywh2xyxy(x):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
+ y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
+ y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
+ y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
+ return y
+
+
+def xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):
+ # Convert nx4 boxes from [x, y, w, h] normalized to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * (x[:, 0] - x[:, 2] / 2) + padw # top left x
+ y[:, 1] = h * (x[:, 1] - x[:, 3] / 2) + padh # top left y
+ y[:, 2] = w * (x[:, 0] + x[:, 2] / 2) + padw # bottom right x
+ y[:, 3] = h * (x[:, 1] + x[:, 3] / 2) + padh # bottom right y
+ return y
+
+
+def xyn2xy(x, w=640, h=640, padw=0, padh=0):
+ # Convert normalized segments into pixel segments, shape (n,2)
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * x[:, 0] + padw # top left x
+ y[:, 1] = h * x[:, 1] + padh # top left y
+ return y
+
+
+def segment2box(segment, width=640, height=640):
+ # Convert 1 segment label to 1 box label, applying inside-image constraint, i.e. (xy1, xy2, ...) to (xyxy)
+ x, y = segment.T # segment xy
+ inside = (x >= 0) & (y >= 0) & (x <= width) & (y <= height)
+ x, y, = x[inside], y[inside]
+ return np.array([x.min(), y.min(), x.max(), y.max()]) if any(x) else np.zeros((1, 4)) # xyxy
+
+
+def segments2boxes(segments):
+ # Convert segment labels to box labels, i.e. (cls, xy1, xy2, ...) to (cls, xywh)
+ boxes = []
+ for s in segments:
+ x, y = s.T # segment xy
+ boxes.append([x.min(), y.min(), x.max(), y.max()]) # cls, xyxy
+ return xyxy2xywh(np.array(boxes)) # cls, xywh
+
+
+def resample_segments(segments, n=1000):
+ # Up-sample an (n,2) segment
+ for i, s in enumerate(segments):
+ s = np.concatenate((s, s[0:1, :]), axis=0)
+ x = np.linspace(0, len(s) - 1, n)
+ xp = np.arange(len(s))
+ segments[i] = np.concatenate([np.interp(x, xp, s[:, i]) for i in range(2)]).reshape(2, -1).T # segment xy
+ return segments
+
+
+def scale_coords(img1_shape, coords, img0_shape, ratio_pad=None):
+ # Rescale coords (xyxy) from img1_shape to img0_shape
+ if ratio_pad is None: # calculate from img0_shape
+ gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
+ pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
+ else:
+ gain = ratio_pad[0][0]
+ pad = ratio_pad[1]
+
+ coords[:, [0, 2]] -= pad[0] # x padding
+ coords[:, [1, 3]] -= pad[1] # y padding
+ coords[:, :4] /= gain
+ clip_coords(coords, img0_shape)
+ return coords
+
+
+def clip_coords(boxes, img_shape):
+ # Clip bounding xyxy bounding boxes to image shape (height, width)
+ boxes[:, 0].clamp_(0, img_shape[1]) # x1
+ boxes[:, 1].clamp_(0, img_shape[0]) # y1
+ boxes[:, 2].clamp_(0, img_shape[1]) # x2
+ boxes[:, 3].clamp_(0, img_shape[0]) # y2
+
+
+def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
+ box2 = box2.T
+
+ # Get the coordinates of bounding boxes
+ if x1y1x2y2: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ else: # transform from xywh to xyxy
+ b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
+ b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
+ b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
+ b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ iou = inter / union
+
+ if GIoU or DIoU or CIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
+ (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
+ if DIoU:
+ return iou - rho2 / c2 # DIoU
+ elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
+ with torch.no_grad():
+ alpha = v / (v - iou + (1 + eps))
+ return iou - (rho2 / c2 + v * alpha) # CIoU
+ else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ c_area = cw * ch + eps # convex area
+ return iou - (c_area - union) / c_area # GIoU
+ else:
+ return iou # IoU
+
+
+
+
+def bbox_alpha_iou(box1, box2, x1y1x2y2=False, GIoU=False, DIoU=False, CIoU=False, alpha=2, eps=1e-9):
+ # Returns tsqrt_he IoU of box1 to box2. box1 is 4, box2 is nx4
+ box2 = box2.T
+
+ # Get the coordinates of bounding boxes
+ if x1y1x2y2: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ else: # transform from xywh to xyxy
+ b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
+ b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
+ b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
+ b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ # change iou into pow(iou+eps)
+ # iou = inter / union
+ iou = torch.pow(inter/union + eps, alpha)
+ # beta = 2 * alpha
+ if GIoU or DIoU or CIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal
+ rho_x = torch.abs(b2_x1 + b2_x2 - b1_x1 - b1_x2)
+ rho_y = torch.abs(b2_y1 + b2_y2 - b1_y1 - b1_y2)
+ rho2 = ((rho_x ** 2 + rho_y ** 2) / 4) ** alpha # center distance
+ if DIoU:
+ return iou - rho2 / c2 # DIoU
+ elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
+ with torch.no_grad():
+ alpha_ciou = v / ((1 + eps) - inter / union + v)
+ # return iou - (rho2 / c2 + v * alpha_ciou) # CIoU
+ return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
+ else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ # c_area = cw * ch + eps # convex area
+ # return iou - (c_area - union) / c_area # GIoU
+ c_area = torch.max(cw * ch + eps, union) # convex area
+ return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU
+ else:
+ return iou # torch.log(iou+eps) or iou
+
+
+def box_iou(box1, box2):
+ # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ box1 (Tensor[N, 4])
+ box2 (Tensor[M, 4])
+ Returns:
+ iou (Tensor[N, M]): the NxM matrix containing the pairwise
+ IoU values for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ return inter / (area1[:, None] + area2 - inter) # iou = inter / (area1 + area2 - inter)
+
+
+def wh_iou(wh1, wh2):
+ # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
+ wh1 = wh1[:, None] # [N,1,2]
+ wh2 = wh2[None] # [1,M,2]
+ inter = torch.min(wh1, wh2).prod(2) # [N,M]
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter) # iou = inter / (area1 + area2 - inter)
+
+
+def box_giou(box1, box2):
+ """
+ Return generalized intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise generalized IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ areai = whi[:, :, 0] * whi[:, :, 1]
+
+ return iou - (areai - union) / areai
+
+
+def box_ciou(box1, box2, eps: float = 1e-7):
+ """
+ Return complete intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ eps (float, optional): small number to prevent division by zero. Default: 1e-7
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise complete IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ diagonal_distance_squared = (whi[:, :, 0] ** 2) + (whi[:, :, 1] ** 2) + eps
+
+ # centers of boxes
+ x_p = (box1[:, None, 0] + box1[:, None, 2]) / 2
+ y_p = (box1[:, None, 1] + box1[:, None, 3]) / 2
+ x_g = (box2[:, 0] + box2[:, 2]) / 2
+ y_g = (box2[:, 1] + box2[:, 3]) / 2
+ # The distance between boxes' centers squared.
+ centers_distance_squared = (x_p - x_g) ** 2 + (y_p - y_g) ** 2
+
+ w_pred = box1[:, None, 2] - box1[:, None, 0]
+ h_pred = box1[:, None, 3] - box1[:, None, 1]
+
+ w_gt = box2[:, 2] - box2[:, 0]
+ h_gt = box2[:, 3] - box2[:, 1]
+
+ v = (4 / (torch.pi ** 2)) * torch.pow((torch.atan(w_gt / h_gt) - torch.atan(w_pred / h_pred)), 2)
+ with torch.no_grad():
+ alpha = v / (1 - iou + v + eps)
+ return iou - (centers_distance_squared / diagonal_distance_squared) - alpha * v
+
+
+def box_diou(box1, box2, eps: float = 1e-7):
+ """
+ Return distance intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ eps (float, optional): small number to prevent division by zero. Default: 1e-7
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise distance IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ diagonal_distance_squared = (whi[:, :, 0] ** 2) + (whi[:, :, 1] ** 2) + eps
+
+ # centers of boxes
+ x_p = (box1[:, None, 0] + box1[:, None, 2]) / 2
+ y_p = (box1[:, None, 1] + box1[:, None, 3]) / 2
+ x_g = (box2[:, 0] + box2[:, 2]) / 2
+ y_g = (box2[:, 1] + box2[:, 3]) / 2
+ # The distance between boxes' centers squared.
+ centers_distance_squared = (x_p - x_g) ** 2 + (y_p - y_g) ** 2
+
+ # The distance IoU is the IoU penalized by a normalized
+ # distance between boxes' centers squared.
+ return iou - (centers_distance_squared / diagonal_distance_squared)
+
+
+def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
+ labels=()):
+ """Runs Non-Maximum Suppression (NMS) on inference results
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+
+ nc = prediction.shape[2] - 5 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Settings
+ min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
+ max_det = 300 # maximum number of detections per image
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 10.0 # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0, 6), device=prediction.device)] * prediction.shape[0]
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ l = labels[xi]
+ v = torch.zeros((len(l), nc + 5), device=x.device)
+ v[:, :4] = l[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ if nc == 1:
+ x[:, 5:] = x[:, 4:5] # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ print(f'WARNING: NMS time limit {time_limit}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def non_max_suppression_kpt(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
+ labels=(), kpt_label=False, nc=None, nkpt=None):
+ """Runs Non-Maximum Suppression (NMS) on inference results
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+ if nc is None:
+ nc = prediction.shape[2] - 5 if not kpt_label else prediction.shape[2] - 56 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Settings
+ min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
+ max_det = 300 # maximum number of detections per image
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 10.0 # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0,6), device=prediction.device)] * prediction.shape[0]
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ l = labels[xi]
+ v = torch.zeros((len(l), nc + 5), device=x.device)
+ v[:, :4] = l[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ x[:, 5:5+nc] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ if not kpt_label:
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+ else:
+ kpts = x[:, 6:]
+ conf, j = x[:, 5:6].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float(), kpts), 1)[conf.view(-1) > conf_thres]
+
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ print(f'WARNING: NMS time limit {time_limit}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def strip_optimizer(f='best.pt', s=''): # from utils.general import *; strip_optimizer()
+ # Strip optimizer from 'f' to finalize training, optionally save as 's'
+ x = torch.load(f, map_location=torch.device('cpu'))
+ if x.get('ema'):
+ x['model'] = x['ema'] # replace model with ema
+ for k in 'optimizer', 'training_results', 'wandb_id', 'ema', 'updates': # keys
+ x[k] = None
+ x['epoch'] = -1
+ x['model'].half() # to FP16
+ for p in x['model'].parameters():
+ p.requires_grad = False
+ torch.save(x, s or f)
+ mb = os.path.getsize(s or f) / 1E6 # filesize
+ print(f"Optimizer stripped from {f},{(' saved as %s,' % s) if s else ''} {mb:.1f}MB")
+
+
+def print_mutation(hyp, results, yaml_file='hyp_evolved.yaml', bucket=''):
+ # Print mutation results to evolve.txt (for use with train.py --evolve)
+ a = '%10s' * len(hyp) % tuple(hyp.keys()) # hyperparam keys
+ b = '%10.3g' * len(hyp) % tuple(hyp.values()) # hyperparam values
+ c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
+ print('\n%s\n%s\nEvolved fitness: %s\n' % (a, b, c))
+
+ if bucket:
+ url = 'gs://%s/evolve.txt' % bucket
+ if gsutil_getsize(url) > (os.path.getsize('evolve.txt') if os.path.exists('evolve.txt') else 0):
+ os.system('gsutil cp %s .' % url) # download evolve.txt if larger than local
+
+ with open('evolve.txt', 'a') as f: # append result
+ f.write(c + b + '\n')
+ x = np.unique(np.loadtxt('evolve.txt', ndmin=2), axis=0) # load unique rows
+ x = x[np.argsort(-fitness(x))] # sort
+ np.savetxt('evolve.txt', x, '%10.3g') # save sort by fitness
+
+ # Save yaml
+ for i, k in enumerate(hyp.keys()):
+ hyp[k] = float(x[0, i + 7])
+ with open(yaml_file, 'w') as f:
+ results = tuple(x[0, :7])
+ c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
+ f.write('# Hyperparameter Evolution Results\n# Generations: %g\n# Metrics: ' % len(x) + c + '\n\n')
+ yaml.dump(hyp, f, sort_keys=False)
+
+ if bucket:
+ os.system('gsutil cp evolve.txt %s gs://%s' % (yaml_file, bucket)) # upload
+
+
+def apply_classifier(x, model, img, im0):
+ # applies a second stage classifier to yolo outputs
+ im0 = [im0] if isinstance(im0, np.ndarray) else im0
+ for i, d in enumerate(x): # per image
+ if d is not None and len(d):
+ d = d.clone()
+
+ # Reshape and pad cutouts
+ b = xyxy2xywh(d[:, :4]) # boxes
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # rectangle to square
+ b[:, 2:] = b[:, 2:] * 1.3 + 30 # pad
+ d[:, :4] = xywh2xyxy(b).long()
+
+ # Rescale boxes from img_size to im0 size
+ scale_coords(img.shape[2:], d[:, :4], im0[i].shape)
+
+ # Classes
+ pred_cls1 = d[:, 5].long()
+ ims = []
+ for j, a in enumerate(d): # per item
+ cutout = im0[i][int(a[1]):int(a[3]), int(a[0]):int(a[2])]
+ im = cv2.resize(cutout, (224, 224)) # BGR
+ # cv2.imwrite('test%i.jpg' % j, cutout)
+
+ im = im[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ im = np.ascontiguousarray(im, dtype=np.float32) # uint8 to float32
+ im /= 255.0 # 0 - 255 to 0.0 - 1.0
+ ims.append(im)
+
+ pred_cls2 = model(torch.Tensor(ims).to(d.device)).argmax(1) # classifier prediction
+ x[i] = x[i][pred_cls1 == pred_cls2] # retain matching class detections
+
+ return x
+
+
+def increment_path(path, exist_ok=True, sep=''):
+ # Increment path, i.e. runs/exp --> runs/exp{sep}0, runs/exp{sep}1 etc.
+ path = Path(path) # os-agnostic
+ if (path.exists() and exist_ok) or (not path.exists()):
+ return str(path)
+ else:
+ dirs = glob.glob(f"{path}{sep}*") # similar paths
+ matches = [re.search(rf"%s{sep}(\d+)" % path.stem, d) for d in dirs]
+ i = [int(m.groups()[0]) for m in matches if m] # indices
+ n = max(i) + 1 if i else 2 # increment number
+ return f"{path}{sep}{n}" # update path
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/Dockerfile b/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/Dockerfile
new file mode 100644
index 000000000..8d6040f26
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/Dockerfile
@@ -0,0 +1,26 @@
+FROM gcr.io/google-appengine/python
+
+
+# Create a virtualenv for dependencies. This isolates these packages from
+# system-level packages.
+# Use -p python3 or -p python3.7 to select python version. Default is version 2.
+RUN virtualenv /env -p python3
+
+# Setting these environment variables are the same as running
+# source /env/bin/activate.
+ENV VIRTUAL_ENV /env
+ENV PATH /env/bin:$PATH
+
+RUN apt-get update && apt-get install -y python-opencv
+
+# Copy the application's requirements.txt and run pip to install all
+# dependencies into the virtualenv.
+ADD requirements.txt /app/requirements.txt
+RUN pip install -r /app/requirements.txt
+
+# Add the application source code.
+ADD . /app
+
+# Run a WSGI server to serve the application. gunicorn must be declared as
+# a dependency in requirements.txt.
+CMD gunicorn -b :$PORT main:app
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/additional_requirements.txt b/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/additional_requirements.txt
new file mode 100644
index 000000000..a40b65907
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/additional_requirements.txt
@@ -0,0 +1,5 @@
+# add these requirements in your app on top of the existing ones
+pip==18.1
+Flask==1.0.2
+gunicorn==19.9.0
+
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/app.yaml b/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/app.yaml
new file mode 100644
index 000000000..61bfcdfe7
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/google_app_engine/app.yaml
@@ -0,0 +1,14 @@
+runtime: custom
+env: flex
+
+service: yolorapp
+
+liveness_check:
+ initial_delay_sec: 600
+
+manual_scaling:
+ instances: 1
+resources:
+ cpu: 1
+ memory_gb: 4
+ disk_size_gb: 20
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/google_utils.py b/oneAPI_ODAV_APP/ENGINES/utils/google_utils.py
new file mode 100644
index 000000000..b2a818336
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/google_utils.py
@@ -0,0 +1,124 @@
+# Google utils: https://cloud.google.com/storage/docs/reference/libraries
+
+import os
+import platform
+import subprocess
+import time
+from pathlib import Path
+
+import requests
+import torch
+
+
+
+def gsutil_getsize(url=''):
+ # gs://bucket/file size https://cloud.google.com/storage/docs/gsutil/commands/du
+ s = subprocess.check_output(f'gsutil du {url}', shell=True).decode('utf-8')
+ return eval(s.split(' ')[0]) if len(s) else 0 # bytes
+
+
+def attempt_download(file, repo='WongKinYiu/yolov7'):
+ # Attempt file download if does not exist
+ file = Path(str(file).strip().replace("'", '').lower())
+
+ if not file.exists():
+ try:
+ response = requests.get(f'https://api.github.com/repos/{repo}/releases/latest').json() # github api
+ assets = [x['name'] for x in response['assets']] # release assets
+ tag = response['tag_name'] # i.e. 'v1.0'
+ except: # fallback plan
+ assets = ['yolov7.pt', 'yolov7-tiny.pt', 'yolov7x.pt', 'yolov7-d6.pt', 'yolov7-e6.pt',
+ 'yolov7-e6e.pt', 'yolov7-w6.pt']
+ tag = subprocess.check_output('git tag', shell=True).decode().split()[-1]
+
+ name = file.name
+ if name in assets:
+ msg = f'{file} missing, try downloading from https://github.com/{repo}/releases/'
+ redundant = False # second download option
+ try: # GitHub
+ url = f'https://github.com/{repo}/releases/download/{tag}/{name}'
+ print(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, file)
+ assert file.exists() and file.stat().st_size > 1E6 # check
+ except Exception as e: # GCP
+ print(f'Download error: {e}')
+ assert redundant, 'No secondary mirror'
+ url = f'https://storage.googleapis.com/{repo}/ckpt/{name}'
+ print(f'Downloading {url} to {file}...')
+ os.system(f'curl -L {url} -o {file}') # torch.hub.download_url_to_file(url, weights)
+ finally:
+ if not file.exists() or file.stat().st_size < 1E6: # check
+ file.unlink(missing_ok=True) # remove partial downloads
+ print(f'ERROR: Download failure: {msg}')
+ print('')
+ return
+
+
+def gdrive_download(id='', file='tmp.zip'):
+ # Downloads a file from Google Drive. from yolov7.utils.google_utils import *; gdrive_download()
+ t = time.time()
+ file = Path(file)
+ cookie = Path('cookie') # gdrive cookie
+ print(f'Downloading https://drive.google.com/uc?export=download&id={id} as {file}... ', end='')
+ file.unlink(missing_ok=True) # remove existing file
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Attempt file download
+ out = "NUL" if platform.system() == "Windows" else "/dev/null"
+ os.system(f'curl -c ./cookie -s -L "drive.google.com/uc?export=download&id={id}" > {out}')
+ if os.path.exists('cookie'): # large file
+ s = f'curl -Lb ./cookie "drive.google.com/uc?export=download&confirm={get_token()}&id={id}" -o {file}'
+ else: # small file
+ s = f'curl -s -L -o {file} "drive.google.com/uc?export=download&id={id}"'
+ r = os.system(s) # execute, capture return
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Error check
+ if r != 0:
+ file.unlink(missing_ok=True) # remove partial
+ print('Download error ') # raise Exception('Download error')
+ return r
+
+ # Unzip if archive
+ if file.suffix == '.zip':
+ print('unzipping... ', end='')
+ os.system(f'unzip -q {file}') # unzip
+ file.unlink() # remove zip to free space
+
+ print(f'Done ({time.time() - t:.1f}s)')
+ return r
+
+
+def get_token(cookie="./cookie"):
+ with open(cookie) as f:
+ for line in f:
+ if "download" in line:
+ return line.split()[-1]
+ return ""
+
+# def upload_blob(bucket_name, source_file_name, destination_blob_name):
+# # Uploads a file to a bucket
+# # https://cloud.google.com/storage/docs/uploading-objects#storage-upload-object-python
+#
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(destination_blob_name)
+#
+# blob.upload_from_filename(source_file_name)
+#
+# print('File {} uploaded to {}.'.format(
+# source_file_name,
+# destination_blob_name))
+#
+#
+# def download_blob(bucket_name, source_blob_name, destination_file_name):
+# # Uploads a blob from a bucket
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(source_blob_name)
+#
+# blob.download_to_filename(destination_file_name)
+#
+# print('Blob {} downloaded to {}.'.format(
+# source_blob_name,
+# destination_file_name))
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/loss.py b/oneAPI_ODAV_APP/ENGINES/utils/loss.py
new file mode 100644
index 000000000..8468e3dbb
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/loss.py
@@ -0,0 +1,1698 @@
+# Loss functions
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+from utils.general import bbox_iou, bbox_alpha_iou, box_iou, box_giou, box_diou, box_ciou, xywh2xyxy
+from utils.torch_utils import is_parallel
+
+
+
+def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
+ # return positive, negative label smoothing BCE targets
+ return 1.0 - 0.5 * eps, 0.5 * eps
+
+
+class BCEBlurWithLogitsLoss(nn.Module):
+ # BCEwithLogitLoss() with reduced missing label effects.
+ def __init__(self, alpha=0.05):
+ super(BCEBlurWithLogitsLoss, self).__init__()
+ self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
+ self.alpha = alpha
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ pred = torch.sigmoid(pred) # prob from logits
+ dx = pred - true # reduce only missing label effects
+ # dx = (pred - true).abs() # reduce missing label and false label effects
+ alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
+ loss *= alpha_factor
+ return loss.mean()
+
+
+class SigmoidBin(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, bin_count=10, min=0.0, max=1.0, reg_scale = 2.0, use_loss_regression=True, use_fw_regression=True, BCE_weight=1.0, smooth_eps=0.0):
+ super(SigmoidBin, self).__init__()
+
+ self.bin_count = bin_count
+ self.length = bin_count + 1
+ self.min = min
+ self.max = max
+ self.scale = float(max - min)
+ self.shift = self.scale / 2.0
+
+ self.use_loss_regression = use_loss_regression
+ self.use_fw_regression = use_fw_regression
+ self.reg_scale = reg_scale
+ self.BCE_weight = BCE_weight
+
+ start = min + (self.scale/2.0) / self.bin_count
+ end = max - (self.scale/2.0) / self.bin_count
+ step = self.scale / self.bin_count
+ self.step = step
+ #print(f" start = {start}, end = {end}, step = {step} ")
+
+ bins = torch.range(start, end + 0.0001, step).float()
+ self.register_buffer('bins', bins)
+
+
+ self.cp = 1.0 - 0.5 * smooth_eps
+ self.cn = 0.5 * smooth_eps
+
+ self.BCEbins = nn.BCEWithLogitsLoss(pos_weight=torch.Tensor([BCE_weight]))
+ self.MSELoss = nn.MSELoss()
+
+ def get_length(self):
+ return self.length
+
+ def forward(self, pred):
+ assert pred.shape[-1] == self.length, 'pred.shape[-1]=%d is not equal to self.length=%d' % (pred.shape[-1], self.length)
+
+ pred_reg = (pred[..., 0] * self.reg_scale - self.reg_scale/2.0) * self.step
+ pred_bin = pred[..., 1:(1+self.bin_count)]
+
+ _, bin_idx = torch.max(pred_bin, dim=-1)
+ bin_bias = self.bins[bin_idx]
+
+ if self.use_fw_regression:
+ result = pred_reg + bin_bias
+ else:
+ result = bin_bias
+ result = result.clamp(min=self.min, max=self.max)
+
+ return result
+
+
+ def training_loss(self, pred, target):
+ assert pred.shape[-1] == self.length, 'pred.shape[-1]=%d is not equal to self.length=%d' % (pred.shape[-1], self.length)
+ assert pred.shape[0] == target.shape[0], 'pred.shape=%d is not equal to the target.shape=%d' % (pred.shape[0], target.shape[0])
+ device = pred.device
+
+ pred_reg = (pred[..., 0].sigmoid() * self.reg_scale - self.reg_scale/2.0) * self.step
+ pred_bin = pred[..., 1:(1+self.bin_count)]
+
+ diff_bin_target = torch.abs(target[..., None] - self.bins)
+ _, bin_idx = torch.min(diff_bin_target, dim=-1)
+
+ bin_bias = self.bins[bin_idx]
+ bin_bias.requires_grad = False
+ result = pred_reg + bin_bias
+
+ target_bins = torch.full_like(pred_bin, self.cn, device=device) # targets
+ n = pred.shape[0]
+ target_bins[range(n), bin_idx] = self.cp
+
+ loss_bin = self.BCEbins(pred_bin, target_bins) # BCE
+
+ if self.use_loss_regression:
+ loss_regression = self.MSELoss(result, target) # MSE
+ loss = loss_bin + loss_regression
+ else:
+ loss = loss_bin
+
+ out_result = result.clamp(min=self.min, max=self.max)
+
+ return loss, out_result
+
+
+class FocalLoss(nn.Module):
+ # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(FocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ # p_t = torch.exp(-loss)
+ # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
+
+ # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = (1.0 - p_t) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class QFocalLoss(nn.Module):
+ # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(QFocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = torch.abs(true - pred_prob) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+class RankSort(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, delta_RS=0.50, eps=1e-10):
+
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets > 0.)
+ fg_logits = logits[fg_labels]
+ fg_targets = targets[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta_RS
+ relevant_bg_labels=((targets==0) & (logits>=threshold_logit))
+
+ relevant_bg_logits = logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ sorting_error=torch.zeros(fg_num).cuda()
+ ranking_error=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ # Difference Transforms (x_ij)
+ fg_relations=fg_logits-fg_logits[ii]
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+
+ if delta_RS > 0:
+ fg_relations=torch.clamp(fg_relations/(2*delta_RS)+0.5,min=0,max=1)
+ bg_relations=torch.clamp(bg_relations/(2*delta_RS)+0.5,min=0,max=1)
+ else:
+ fg_relations = (fg_relations >= 0).float()
+ bg_relations = (bg_relations >= 0).float()
+
+ # Rank of ii among pos and false positive number (bg with larger scores)
+ rank_pos=torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+
+ # Rank of ii among all examples
+ rank=rank_pos+FP_num
+
+ # Ranking error of example ii. target_ranking_error is always 0. (Eq. 7)
+ ranking_error[ii]=FP_num/rank
+
+ # Current sorting error of example ii. (Eq. 7)
+ current_sorting_error = torch.sum(fg_relations*(1-fg_targets))/rank_pos
+
+ #Find examples in the target sorted order for example ii
+ iou_relations = (fg_targets >= fg_targets[ii])
+ target_sorted_order = iou_relations * fg_relations
+
+ #The rank of ii among positives in sorted order
+ rank_pos_target = torch.sum(target_sorted_order)
+
+ #Compute target sorting error. (Eq. 8)
+ #Since target ranking error is 0, this is also total target error
+ target_sorting_error= torch.sum(target_sorted_order*(1-fg_targets))/rank_pos_target
+
+ #Compute sorting error on example ii
+ sorting_error[ii] = current_sorting_error - target_sorting_error
+
+ #Identity Update for Ranking Error
+ if FP_num > eps:
+ #For ii the update is the ranking error
+ fg_grad[ii] -= ranking_error[ii]
+ #For negatives, distribute error via ranking pmf (i.e. bg_relations/FP_num)
+ relevant_bg_grad += (bg_relations*(ranking_error[ii]/FP_num))
+
+ #Find the positives that are misranked (the cause of the error)
+ #These are the ones with smaller IoU but larger logits
+ missorted_examples = (~ iou_relations) * fg_relations
+
+ #Denominotor of sorting pmf
+ sorting_pmf_denom = torch.sum(missorted_examples)
+
+ #Identity Update for Sorting Error
+ if sorting_pmf_denom > eps:
+ #For ii the update is the sorting error
+ fg_grad[ii] -= sorting_error[ii]
+ #For positives, distribute error via sorting pmf (i.e. missorted_examples/sorting_pmf_denom)
+ fg_grad += (missorted_examples*(sorting_error[ii]/sorting_pmf_denom))
+
+ #Normalize gradients by number of positives
+ classification_grads[fg_labels]= (fg_grad/fg_num)
+ classification_grads[relevant_bg_labels]= (relevant_bg_grad/fg_num)
+
+ ctx.save_for_backward(classification_grads)
+
+ return ranking_error.mean(), sorting_error.mean()
+
+ @staticmethod
+ def backward(ctx, out_grad1, out_grad2):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None, None
+
+class aLRPLoss(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, regression_losses, delta=1., eps=1e-5):
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets == 1)
+ fg_logits = logits[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta
+
+ #Get valid bg logits
+ relevant_bg_labels=((targets==0)&(logits>=threshold_logit))
+ relevant_bg_logits=logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ rank=torch.zeros(fg_num).cuda()
+ prec=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ max_prec=0
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ #x_ij s as score differences with fgs
+ fg_relations=fg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with fgs
+ fg_relations=torch.clamp(fg_relations/(2*delta)+0.5,min=0,max=1)
+ #Discard i=j in the summation in rank_pos
+ fg_relations[ii]=0
+
+ #x_ij s as score differences with bgs
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with bgs
+ bg_relations=torch.clamp(bg_relations/(2*delta)+0.5,min=0,max=1)
+
+ #Compute the rank of the example within fgs and number of bgs with larger scores
+ rank_pos=1+torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+ #Store the total since it is normalizer also for aLRP Regression error
+ rank[ii]=rank_pos+FP_num
+
+ #Compute precision for this example to compute classification loss
+ prec[ii]=rank_pos/rank[ii]
+ #For stability, set eps to a infinitesmall value (e.g. 1e-6), then compute grads
+ if FP_num > eps:
+ fg_grad[ii] = -(torch.sum(fg_relations*regression_losses)+FP_num)/rank[ii]
+ relevant_bg_grad += (bg_relations*(-fg_grad[ii]/FP_num))
+
+ #aLRP with grad formulation fg gradient
+ classification_grads[fg_labels]= fg_grad
+ #aLRP with grad formulation bg gradient
+ classification_grads[relevant_bg_labels]= relevant_bg_grad
+
+ classification_grads /= (fg_num)
+
+ cls_loss=1-prec.mean()
+ ctx.save_for_backward(classification_grads)
+
+ return cls_loss, rank, order
+
+ @staticmethod
+ def backward(ctx, out_grad1, out_grad2, out_grad3):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None, None, None
+
+
+class APLoss(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, delta=1.):
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets == 1)
+ fg_logits = logits[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta
+
+ #Get valid bg logits
+ relevant_bg_labels=((targets==0)&(logits>=threshold_logit))
+ relevant_bg_logits=logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ rank=torch.zeros(fg_num).cuda()
+ prec=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ max_prec=0
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ #x_ij s as score differences with fgs
+ fg_relations=fg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with fgs
+ fg_relations=torch.clamp(fg_relations/(2*delta)+0.5,min=0,max=1)
+ #Discard i=j in the summation in rank_pos
+ fg_relations[ii]=0
+
+ #x_ij s as score differences with bgs
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with bgs
+ bg_relations=torch.clamp(bg_relations/(2*delta)+0.5,min=0,max=1)
+
+ #Compute the rank of the example within fgs and number of bgs with larger scores
+ rank_pos=1+torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+ #Store the total since it is normalizer also for aLRP Regression error
+ rank[ii]=rank_pos+FP_num
+
+ #Compute precision for this example
+ current_prec=rank_pos/rank[ii]
+
+ #Compute interpolated AP and store gradients for relevant bg examples
+ if (max_prec<=current_prec):
+ max_prec=current_prec
+ relevant_bg_grad += (bg_relations/rank[ii])
+ else:
+ relevant_bg_grad += (bg_relations/rank[ii])*(((1-max_prec)/(1-current_prec)))
+
+ #Store fg gradients
+ fg_grad[ii]=-(1-max_prec)
+ prec[ii]=max_prec
+
+ #aLRP with grad formulation fg gradient
+ classification_grads[fg_labels]= fg_grad
+ #aLRP with grad formulation bg gradient
+ classification_grads[relevant_bg_labels]= relevant_bg_grad
+
+ classification_grads /= fg_num
+
+ cls_loss=1-prec.mean()
+ ctx.save_for_backward(classification_grads)
+
+ return cls_loss
+
+ @staticmethod
+ def backward(ctx, out_grad1):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLoss, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ #self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.1, .05]) # P3-P7
+ #self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.5, 0.4, .1]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), tcls[i]] = self.cp
+ #t[t==self.cp] = iou.detach().clamp(0).type(t.dtype)
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch = [], [], [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+
+ return tcls, tbox, indices, anch
+
+
+class ComputeLossOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p, targets, imgs)
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p]
+
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ #pxy = ps[:, :2].sigmoid() * 3. - 1.
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ #indices, anch = self.find_positive(p, targets)
+ indices, anch = self.find_3_positive(p, targets)
+ #indices, anch = self.find_4_positive(p, targets)
+ #indices, anch = self.find_5_positive(p, targets)
+ #indices, anch = self.find_9_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(10, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+
+class ComputeLossBinOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossBinOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+ #MSEangle = nn.MSELoss().to(device)
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride', 'bin_count':
+ setattr(self, k, getattr(det, k))
+
+ #xy_bin_sigmoid = SigmoidBin(bin_count=11, min=-0.5, max=1.5, use_loss_regression=False).to(device)
+ wh_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0, use_loss_regression=False).to(device)
+ #angle_bin_sigmoid = SigmoidBin(bin_count=31, min=-1.1, max=1.1, use_loss_regression=False).to(device)
+ self.wh_bin_sigmoid = wh_bin_sigmoid
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p, targets, imgs)
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p]
+
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ obj_idx = self.wh_bin_sigmoid.get_length()*2 + 2 # x,y, w-bce, h-bce # xy_bin_sigmoid.get_length()*2
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+
+ #pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ ##pxy = ps[:, :2].sigmoid() * 3. - 1.
+ #pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ #pbox = torch.cat((pxy, pwh), 1) # predicted box
+
+ #x_loss, px = xy_bin_sigmoid.training_loss(ps[..., 0:12], tbox[i][..., 0])
+ #y_loss, py = xy_bin_sigmoid.training_loss(ps[..., 12:24], tbox[i][..., 1])
+ w_loss, pw = self.wh_bin_sigmoid.training_loss(ps[..., 2:(3+self.bin_count)], selected_tbox[..., 2] / anchors[i][..., 0])
+ h_loss, ph = self.wh_bin_sigmoid.training_loss(ps[..., (3+self.bin_count):obj_idx], selected_tbox[..., 3] / anchors[i][..., 1])
+
+ pw *= anchors[i][..., 0]
+ ph *= anchors[i][..., 1]
+
+ px = ps[:, 0].sigmoid() * 2. - 0.5
+ py = ps[:, 1].sigmoid() * 2. - 0.5
+
+ lbox += w_loss + h_loss # + x_loss + y_loss
+
+ #print(f"\n px = {px.shape}, py = {py.shape}, pw = {pw.shape}, ph = {ph.shape} \n")
+
+ pbox = torch.cat((px.unsqueeze(1), py.unsqueeze(1), pw.unsqueeze(1), ph.unsqueeze(1)), 1).to(device) # predicted box
+
+
+
+
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, (1+obj_idx):], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, (1+obj_idx):], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., obj_idx], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ #indices, anch = self.find_positive(p, targets)
+ indices, anch = self.find_3_positive(p, targets)
+ #indices, anch = self.find_4_positive(p, targets)
+ #indices, anch = self.find_5_positive(p, targets)
+ #indices, anch = self.find_9_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ obj_idx = self.wh_bin_sigmoid.get_length()*2 + 2
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, obj_idx:(obj_idx+1)])
+ p_cls.append(fg_pred[:, (obj_idx+1):])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pw = self.wh_bin_sigmoid.forward(fg_pred[..., 2:(3+self.bin_count)].sigmoid()) * anch[i][idx][:, 0] * self.stride[i]
+ ph = self.wh_bin_sigmoid.forward(fg_pred[..., (3+self.bin_count):obj_idx].sigmoid()) * anch[i][idx][:, 1] * self.stride[i]
+
+ pxywh = torch.cat([pxy, pw.unsqueeze(1), ph.unsqueeze(1)], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(10, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+
+class ComputeLossAuxOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossAuxOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs_aux, as_aux_, gjs_aux, gis_aux, targets_aux, anchors_aux = self.build_targets2(p[:self.nl], targets, imgs)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p[:self.nl], targets, imgs)
+ pre_gen_gains_aux = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p[:self.nl]]
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p[:self.nl]]
+
+
+ # Losses
+ for i in range(self.nl): # layer index, layer predictions
+ pi = p[i]
+ pi_aux = p[i+self.nl]
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ b_aux, a_aux, gj_aux, gi_aux = bs_aux[i], as_aux_[i], gjs_aux[i], gis_aux[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+ tobj_aux = torch.zeros_like(pi_aux[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ n_aux = b_aux.shape[0] # number of targets
+ if n_aux:
+ ps_aux = pi_aux[b_aux, a_aux, gj_aux, gi_aux] # prediction subset corresponding to targets
+ grid_aux = torch.stack([gi_aux, gj_aux], dim=1)
+ pxy_aux = ps_aux[:, :2].sigmoid() * 2. - 0.5
+ #pxy_aux = ps_aux[:, :2].sigmoid() * 3. - 1.
+ pwh_aux = (ps_aux[:, 2:4].sigmoid() * 2) ** 2 * anchors_aux[i]
+ pbox_aux = torch.cat((pxy_aux, pwh_aux), 1) # predicted box
+ selected_tbox_aux = targets_aux[i][:, 2:6] * pre_gen_gains_aux[i]
+ selected_tbox_aux[:, :2] -= grid_aux
+ iou_aux = bbox_iou(pbox_aux.T, selected_tbox_aux, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += 0.25 * (1.0 - iou_aux).mean() # iou loss
+
+ # Objectness
+ tobj_aux[b_aux, a_aux, gj_aux, gi_aux] = (1.0 - self.gr) + self.gr * iou_aux.detach().clamp(0).type(tobj_aux.dtype) # iou ratio
+
+ # Classification
+ selected_tcls_aux = targets_aux[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t_aux = torch.full_like(ps_aux[:, 5:], self.cn, device=device) # targets
+ t_aux[range(n_aux), selected_tcls_aux] = self.cp
+ lcls += 0.25 * self.BCEcls(ps_aux[:, 5:], t_aux) # BCE
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ obji_aux = self.BCEobj(pi_aux[..., 4], tobj_aux)
+ lobj += obji * self.balance[i] + 0.25 * obji_aux * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ indices, anch = self.find_3_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(20, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def build_targets2(self, p, targets, imgs):
+
+ indices, anch = self.find_5_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(20, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_5_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 1.0 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/metrics.py b/oneAPI_ODAV_APP/ENGINES/utils/metrics.py
new file mode 100644
index 000000000..180e33e3b
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/metrics.py
@@ -0,0 +1,228 @@
+# Model validation metrics
+
+from pathlib import Path
+
+import matplotlib.pyplot as plt
+import numpy as np
+import torch
+
+from . import general
+
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
+ return (x[:, :4] * w).sum(1)
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, v5_metric=False, plot=False, save_dir='.', names=()):
+ """ Compute the average precision, given the recall and precision curves.
+ Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
+ # Arguments
+ tp: True positives (nparray, nx1 or nx10).
+ conf: Objectness value from 0-1 (nparray).
+ pred_cls: Predicted object classes (nparray).
+ target_cls: True object classes (nparray).
+ plot: Plot precision-recall curve at mAP@0.5
+ save_dir: Plot save directory
+ # Returns
+ The average precision as computed in py-faster-rcnn.
+ """
+
+ # Sort by objectness
+ i = np.argsort(-conf)
+ tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
+
+ # Find unique classes
+ unique_classes = np.unique(target_cls)
+ nc = unique_classes.shape[0] # number of classes, number of detections
+
+ # Create Precision-Recall curve and compute AP for each class
+ px, py = np.linspace(0, 1, 1000), [] # for plotting
+ ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
+ for ci, c in enumerate(unique_classes):
+ i = pred_cls == c
+ n_l = (target_cls == c).sum() # number of labels
+ n_p = i.sum() # number of predictions
+
+ if n_p == 0 or n_l == 0:
+ continue
+ else:
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + 1e-16) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j], v5_metric=v5_metric)
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+
+ # Compute F1 (harmonic mean of precision and recall)
+ f1 = 2 * p * r / (p + r + 1e-16)
+ if plot:
+ plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
+
+ i = f1.mean(0).argmax() # max F1 index
+ return p[:, i], r[:, i], ap, f1[:, i], unique_classes.astype('int32')
+
+
+def compute_ap(recall, precision, v5_metric=False):
+ """ Compute the average precision, given the recall and precision curves
+ # Arguments
+ recall: The recall curve (list)
+ precision: The precision curve (list)
+ v5_metric: Assume maximum recall to be 1.0, as in YOLOv5, MMDetetion etc.
+ # Returns
+ Average precision, precision curve, recall curve
+ """
+
+ # Append sentinel values to beginning and end
+ if v5_metric: # New YOLOv5 metric, same as MMDetection and Detectron2 repositories
+ mrec = np.concatenate(([0.], recall, [1.0]))
+ else: # Old YOLOv5 metric, i.e. default YOLOv7 metric
+ mrec = np.concatenate(([0.], recall, [recall[-1] + 0.01]))
+ mpre = np.concatenate(([1.], precision, [0.]))
+
+ # Compute the precision envelope
+ mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
+
+ # Integrate area under curve
+ method = 'interp' # methods: 'continuous', 'interp'
+ if method == 'interp':
+ x = np.linspace(0, 1, 101) # 101-point interp (COCO)
+ ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
+ else: # 'continuous'
+ i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
+ ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
+
+ return ap, mpre, mrec
+
+
+class ConfusionMatrix:
+ # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
+ def __init__(self, nc, conf=0.25, iou_thres=0.45):
+ self.matrix = np.zeros((nc + 1, nc + 1))
+ self.nc = nc # number of classes
+ self.conf = conf
+ self.iou_thres = iou_thres
+
+ def process_batch(self, detections, labels):
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ None, updates confusion matrix accordingly
+ """
+ detections = detections[detections[:, 4] > self.conf]
+ gt_classes = labels[:, 0].int()
+ detection_classes = detections[:, 5].int()
+ iou = general.box_iou(labels[:, 1:], detections[:, :4])
+
+ x = torch.where(iou > self.iou_thres)
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ else:
+ matches = np.zeros((0, 3))
+
+ n = matches.shape[0] > 0
+ m0, m1, _ = matches.transpose().astype(np.int16)
+ for i, gc in enumerate(gt_classes):
+ j = m0 == i
+ if n and sum(j) == 1:
+ self.matrix[gc, detection_classes[m1[j]]] += 1 # correct
+ else:
+ self.matrix[self.nc, gc] += 1 # background FP
+
+ if n:
+ for i, dc in enumerate(detection_classes):
+ if not any(m1 == i):
+ self.matrix[dc, self.nc] += 1 # background FN
+
+ def matrix(self):
+ return self.matrix
+
+ def plot(self, save_dir='', names=()):
+ try:
+ import seaborn as sn
+
+ array = self.matrix / (self.matrix.sum(0).reshape(1, self.nc + 1) + 1E-6) # normalize
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig = plt.figure(figsize=(12, 9), tight_layout=True)
+ sn.set(font_scale=1.0 if self.nc < 50 else 0.8) # for label size
+ labels = (0 < len(names) < 99) and len(names) == self.nc # apply names to ticklabels
+ sn.heatmap(array, annot=self.nc < 30, annot_kws={"size": 8}, cmap='Blues', fmt='.2f', square=True,
+ xticklabels=names + ['background FP'] if labels else "auto",
+ yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
+ fig.axes[0].set_xlabel('True')
+ fig.axes[0].set_ylabel('Predicted')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ except Exception as e:
+ pass
+
+ def print(self):
+ for i in range(self.nc + 1):
+ print(' '.join(map(str, self.matrix[i])))
+
+
+# Plots ----------------------------------------------------------------------------------------------------------------
+
+def plot_pr_curve(px, py, ap, save_dir='pr_curve.png', names=()):
+ # Precision-recall curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+ py = np.stack(py, axis=1)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py.T):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)
+ else:
+ ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)
+
+ ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())
+ ax.set_xlabel('Recall')
+ ax.set_ylabel('Precision')
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
+
+
+def plot_mc_curve(px, py, save_dir='mc_curve.png', names=(), xlabel='Confidence', ylabel='Metric'):
+ # Metric-confidence curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)
+ else:
+ ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
+
+ y = py.mean(0)
+ ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
+ ax.set_xlabel(xlabel)
+ ax.set_ylabel(ylabel)
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/plots.py b/oneAPI_ODAV_APP/ENGINES/utils/plots.py
new file mode 100644
index 000000000..0a1c5f311
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/plots.py
@@ -0,0 +1,490 @@
+# Plotting utils
+
+import glob
+import math
+import os
+import random
+from copy import copy
+from pathlib import Path
+
+import cv2
+import matplotlib
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import seaborn as sns
+import torch
+import yaml
+from PIL import Image, ImageDraw, ImageFont
+from scipy.signal import butter, filtfilt
+
+from utils.general import xywh2xyxy, xyxy2xywh
+from utils.metrics import fitness
+
+
+# Settings
+matplotlib.rc('font', **{'size': 11})
+matplotlib.use('Agg') # for writing to files only
+
+
+def color_list():
+ # Return first 10 plt colors as (r,g,b) https://stackoverflow.com/questions/51350872/python-from-color-name-to-rgb
+ def hex2rgb(h):
+ return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))
+
+ return [hex2rgb(h) for h in matplotlib.colors.TABLEAU_COLORS.values()] # or BASE_ (8), CSS4_ (148), XKCD_ (949)
+
+
+def hist2d(x, y, n=100):
+ # 2d histogram used in labels.png and evolve.png
+ xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
+ hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
+ xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
+ yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
+ return np.log(hist[xidx, yidx])
+
+
+def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
+ # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
+ def butter_lowpass(cutoff, fs, order):
+ nyq = 0.5 * fs
+ normal_cutoff = cutoff / nyq
+ return butter(order, normal_cutoff, btype='low', analog=False)
+
+ b, a = butter_lowpass(cutoff, fs, order=order)
+ return filtfilt(b, a, data) # forward-backward filter
+
+
+def plot_one_box(x, img, color=None, label=None, line_thickness=3):
+ # Plots one bounding box on image img
+ tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
+ color = color or [random.randint(0, 255) for _ in range(3)]
+ c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
+ cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
+ if label:
+ tf = max(tl - 1, 1) # font thickness
+ t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
+ c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
+ cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
+ cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
+
+
+def plot_one_box_PIL(box, img, color=None, label=None, line_thickness=None):
+ img = Image.fromarray(img)
+ draw = ImageDraw.Draw(img)
+ line_thickness = line_thickness or max(int(min(img.size) / 200), 2)
+ draw.rectangle(box, width=line_thickness, outline=tuple(color)) # plot
+ if label:
+ fontsize = max(round(max(img.size) / 40), 12)
+ font = ImageFont.truetype("Arial.ttf", fontsize)
+ txt_width, txt_height = font.getsize(label)
+ draw.rectangle([box[0], box[1] - txt_height + 4, box[0] + txt_width, box[1]], fill=tuple(color))
+ draw.text((box[0], box[1] - txt_height + 1), label, fill=(255, 255, 255), font=font)
+ return np.asarray(img)
+
+
+def plot_wh_methods(): # from utils.plots import *; plot_wh_methods()
+ # Compares the two methods for width-height anchor multiplication
+ # https://github.com/ultralytics/yolov3/issues/168
+ x = np.arange(-4.0, 4.0, .1)
+ ya = np.exp(x)
+ yb = torch.sigmoid(torch.from_numpy(x)).numpy() * 2
+
+ fig = plt.figure(figsize=(6, 3), tight_layout=True)
+ plt.plot(x, ya, '.-', label='YOLOv3')
+ plt.plot(x, yb ** 2, '.-', label='YOLOR ^2')
+ plt.plot(x, yb ** 1.6, '.-', label='YOLOR ^1.6')
+ plt.xlim(left=-4, right=4)
+ plt.ylim(bottom=0, top=6)
+ plt.xlabel('input')
+ plt.ylabel('output')
+ plt.grid()
+ plt.legend()
+ fig.savefig('comparison.png', dpi=200)
+
+
+def output_to_target(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ for *box, conf, cls in o.cpu().numpy():
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])
+ return np.array(targets)
+
+
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=640, max_subplots=16):
+ # Plot image grid with labels
+
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+
+ # un-normalise
+ if np.max(images[0]) <= 1:
+ images *= 255
+
+ tl = 3 # line thickness
+ tf = max(tl - 1, 1) # font thickness
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+
+ # Check if we should resize
+ scale_factor = max_size / max(h, w)
+ if scale_factor < 1:
+ h = math.ceil(scale_factor * h)
+ w = math.ceil(scale_factor * w)
+
+ colors = color_list() # list of colors
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, img in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+
+ block_x = int(w * (i // ns))
+ block_y = int(h * (i % ns))
+
+ img = img.transpose(1, 2, 0)
+ if scale_factor < 1:
+ img = cv2.resize(img, (w, h))
+
+ mosaic[block_y:block_y + h, block_x:block_x + w, :] = img
+ if len(targets) > 0:
+ image_targets = targets[targets[:, 0] == i]
+ boxes = xywh2xyxy(image_targets[:, 2:6]).T
+ classes = image_targets[:, 1].astype('int')
+ labels = image_targets.shape[1] == 6 # labels if no conf column
+ conf = None if labels else image_targets[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale_factor < 1: # absolute coords need scale if image scales
+ boxes *= scale_factor
+ boxes[[0, 2]] += block_x
+ boxes[[1, 3]] += block_y
+ for j, box in enumerate(boxes.T):
+ cls = int(classes[j])
+ color = colors[cls % len(colors)]
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = '%s' % cls if labels else '%s %.1f' % (cls, conf[j])
+ plot_one_box(box, mosaic, label=label, color=color, line_thickness=tl)
+
+ # Draw image filename labels
+ if paths:
+ label = Path(paths[i]).name[:40] # trim to 40 char
+ t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
+ cv2.putText(mosaic, label, (block_x + 5, block_y + t_size[1] + 5), 0, tl / 3, [220, 220, 220], thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ # Image border
+ cv2.rectangle(mosaic, (block_x, block_y), (block_x + w, block_y + h), (255, 255, 255), thickness=3)
+
+ if fname:
+ r = min(1280. / max(h, w) / ns, 1.0) # ratio to limit image size
+ mosaic = cv2.resize(mosaic, (int(ns * w * r), int(ns * h * r)), interpolation=cv2.INTER_AREA)
+ # cv2.imwrite(fname, cv2.cvtColor(mosaic, cv2.COLOR_BGR2RGB)) # cv2 save
+ Image.fromarray(mosaic).save(fname) # PIL save
+ return mosaic
+
+
+def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):
+ # Plot LR simulating training for full epochs
+ optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
+ y = []
+ for _ in range(epochs):
+ scheduler.step()
+ y.append(optimizer.param_groups[0]['lr'])
+ plt.plot(y, '.-', label='LR')
+ plt.xlabel('epoch')
+ plt.ylabel('LR')
+ plt.grid()
+ plt.xlim(0, epochs)
+ plt.ylim(0)
+ plt.savefig(Path(save_dir) / 'LR.png', dpi=200)
+ plt.close()
+
+
+def plot_test_txt(): # from utils.plots import *; plot_test()
+ # Plot test.txt histograms
+ x = np.loadtxt('test.txt', dtype=np.float32)
+ box = xyxy2xywh(x[:, :4])
+ cx, cy = box[:, 0], box[:, 1]
+
+ fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
+ ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
+ ax.set_aspect('equal')
+ plt.savefig('hist2d.png', dpi=300)
+
+ fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
+ ax[0].hist(cx, bins=600)
+ ax[1].hist(cy, bins=600)
+ plt.savefig('hist1d.png', dpi=200)
+
+
+def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
+ # Plot targets.txt histograms
+ x = np.loadtxt('targets.txt', dtype=np.float32).T
+ s = ['x targets', 'y targets', 'width targets', 'height targets']
+ fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(4):
+ ax[i].hist(x[i], bins=100, label='%.3g +/- %.3g' % (x[i].mean(), x[i].std()))
+ ax[i].legend()
+ ax[i].set_title(s[i])
+ plt.savefig('targets.jpg', dpi=200)
+
+
+def plot_study_txt(path='', x=None): # from utils.plots import *; plot_study_txt()
+ # Plot study.txt generated by test.py
+ fig, ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)
+ # ax = ax.ravel()
+
+ fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
+ # for f in [Path(path) / f'study_coco_{x}.txt' for x in ['yolor-p6', 'yolor-w6', 'yolor-e6', 'yolor-d6']]:
+ for f in sorted(Path(path).glob('study*.txt')):
+ y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
+ x = np.arange(y.shape[1]) if x is None else np.array(x)
+ s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_inference (ms/img)', 't_NMS (ms/img)', 't_total (ms/img)']
+ # for i in range(7):
+ # ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)
+ # ax[i].set_title(s[i])
+
+ j = y[3].argmax() + 1
+ ax2.plot(y[6, 1:j], y[3, 1:j] * 1E2, '.-', linewidth=2, markersize=8,
+ label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
+
+ ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
+ 'k.-', linewidth=2, markersize=8, alpha=.25, label='EfficientDet')
+
+ ax2.grid(alpha=0.2)
+ ax2.set_yticks(np.arange(20, 60, 5))
+ ax2.set_xlim(0, 57)
+ ax2.set_ylim(30, 55)
+ ax2.set_xlabel('GPU Speed (ms/img)')
+ ax2.set_ylabel('COCO AP val')
+ ax2.legend(loc='lower right')
+ plt.savefig(str(Path(path).name) + '.png', dpi=300)
+
+
+def plot_labels(labels, names=(), save_dir=Path(''), loggers=None):
+ # plot dataset labels
+ print('Plotting labels... ')
+ c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
+ nc = int(c.max() + 1) # number of classes
+ colors = color_list()
+ x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])
+
+ # seaborn correlogram
+ sns.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
+ plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)
+ plt.close()
+
+ # matplotlib labels
+ matplotlib.use('svg') # faster
+ ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
+ ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
+ ax[0].set_ylabel('instances')
+ if 0 < len(names) < 30:
+ ax[0].set_xticks(range(len(names)))
+ ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ else:
+ ax[0].set_xlabel('classes')
+ sns.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
+ sns.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)
+
+ # rectangles
+ labels[:, 1:3] = 0.5 # center
+ labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
+ img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
+ for cls, *box in labels[:1000]:
+ ImageDraw.Draw(img).rectangle(box, width=1, outline=colors[int(cls) % 10]) # plot
+ ax[1].imshow(img)
+ ax[1].axis('off')
+
+ for a in [0, 1, 2, 3]:
+ for s in ['top', 'right', 'left', 'bottom']:
+ ax[a].spines[s].set_visible(False)
+
+ plt.savefig(save_dir / 'labels.jpg', dpi=200)
+ matplotlib.use('Agg')
+ plt.close()
+
+ # loggers
+ for k, v in loggers.items() or {}:
+ if k == 'wandb' and v:
+ v.log({"Labels": [v.Image(str(x), caption=x.name) for x in save_dir.glob('*labels*.jpg')]}, commit=False)
+
+
+def plot_evolution(yaml_file='data/hyp.finetune.yaml'): # from utils.plots import *; plot_evolution()
+ # Plot hyperparameter evolution results in evolve.txt
+ with open(yaml_file) as f:
+ hyp = yaml.load(f, Loader=yaml.SafeLoader)
+ x = np.loadtxt('evolve.txt', ndmin=2)
+ f = fitness(x)
+ # weights = (f - f.min()) ** 2 # for weighted results
+ plt.figure(figsize=(10, 12), tight_layout=True)
+ matplotlib.rc('font', **{'size': 8})
+ for i, (k, v) in enumerate(hyp.items()):
+ y = x[:, i + 7]
+ # mu = (y * weights).sum() / weights.sum() # best weighted result
+ mu = y[f.argmax()] # best single result
+ plt.subplot(6, 5, i + 1)
+ plt.scatter(y, f, c=hist2d(y, f, 20), cmap='viridis', alpha=.8, edgecolors='none')
+ plt.plot(mu, f.max(), 'k+', markersize=15)
+ plt.title('%s = %.3g' % (k, mu), fontdict={'size': 9}) # limit to 40 characters
+ if i % 5 != 0:
+ plt.yticks([])
+ print('%15s: %.3g' % (k, mu))
+ plt.savefig('evolve.png', dpi=200)
+ print('\nPlot saved as evolve.png')
+
+
+def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
+ # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()
+ ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
+ s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']
+ files = list(Path(save_dir).glob('frames*.txt'))
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
+ n = results.shape[1] # number of rows
+ x = np.arange(start, min(stop, n) if stop else n)
+ results = results[:, x]
+ t = (results[0] - results[0].min()) # set t0=0s
+ results[0] = x
+ for i, a in enumerate(ax):
+ if i < len(results):
+ label = labels[fi] if len(labels) else f.stem.replace('frames_', '')
+ a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)
+ a.set_title(s[i])
+ a.set_xlabel('time (s)')
+ # if fi == len(files) - 1:
+ # a.set_ylim(bottom=0)
+ for side in ['top', 'right']:
+ a.spines[side].set_visible(False)
+ else:
+ a.remove()
+ except Exception as e:
+ print('Warning: Plotting error for %s; %s' % (f, e))
+
+ ax[1].legend()
+ plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
+
+
+def plot_results_overlay(start=0, stop=0): # from utils.plots import *; plot_results_overlay()
+ # Plot training 'results*.txt', overlaying train and val losses
+ s = ['train', 'train', 'train', 'Precision', 'mAP@0.5', 'val', 'val', 'val', 'Recall', 'mAP@0.5:0.95'] # legends
+ t = ['Box', 'Objectness', 'Classification', 'P-R', 'mAP-F1'] # titles
+ for f in sorted(glob.glob('results*.txt') + glob.glob('../../Downloads/results*.txt')):
+ results = np.loadtxt(f, usecols=[2, 3, 4, 8, 9, 12, 13, 14, 10, 11], ndmin=2).T
+ n = results.shape[1] # number of rows
+ x = range(start, min(stop, n) if stop else n)
+ fig, ax = plt.subplots(1, 5, figsize=(14, 3.5), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(5):
+ for j in [i, i + 5]:
+ y = results[j, x]
+ ax[i].plot(x, y, marker='.', label=s[j])
+ # y_smooth = butter_lowpass_filtfilt(y)
+ # ax[i].plot(x, np.gradient(y_smooth), marker='.', label=s[j])
+
+ ax[i].set_title(t[i])
+ ax[i].legend()
+ ax[i].set_ylabel(f) if i == 0 else None # add filename
+ fig.savefig(f.replace('.txt', '.png'), dpi=200)
+
+
+def plot_results(start=0, stop=0, bucket='', id=(), labels=(), save_dir=''):
+ # Plot training 'results*.txt'. from utils.plots import *; plot_results(save_dir='runs/train/exp')
+ fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
+ ax = ax.ravel()
+ s = ['Box', 'Objectness', 'Classification', 'Precision', 'Recall',
+ 'val Box', 'val Objectness', 'val Classification', 'mAP@0.5', 'mAP@0.5:0.95']
+ if bucket:
+ # files = ['https://storage.googleapis.com/%s/results%g.txt' % (bucket, x) for x in id]
+ files = ['results%g.txt' % x for x in id]
+ c = ('gsutil cp ' + '%s ' * len(files) + '.') % tuple('gs://%s/results%g.txt' % (bucket, x) for x in id)
+ os.system(c)
+ else:
+ files = list(Path(save_dir).glob('results*.txt'))
+ assert len(files), 'No results.txt files found in %s, nothing to plot.' % os.path.abspath(save_dir)
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, usecols=[2, 3, 4, 8, 9, 12, 13, 14, 10, 11], ndmin=2).T
+ n = results.shape[1] # number of rows
+ x = range(start, min(stop, n) if stop else n)
+ for i in range(10):
+ y = results[i, x]
+ if i in [0, 1, 2, 5, 6, 7]:
+ y[y == 0] = np.nan # don't show zero loss values
+ # y /= y[0] # normalize
+ label = labels[fi] if len(labels) else f.stem
+ ax[i].plot(x, y, marker='.', label=label, linewidth=2, markersize=8)
+ ax[i].set_title(s[i])
+ # if i in [5, 6, 7]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print('Warning: Plotting error for %s; %s' % (f, e))
+
+ ax[1].legend()
+ fig.savefig(Path(save_dir) / 'results.png', dpi=200)
+
+
+def output_to_keypoint(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ kpts = o[:,6:]
+ o = o[:,:6]
+ for index, (*box, conf, cls) in enumerate(o.detach().cpu().numpy()):
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf, *list(kpts.detach().cpu().numpy()[index])])
+ return np.array(targets)
+
+
+def plot_skeleton_kpts(im, kpts, steps, orig_shape=None):
+ #Plot the skeleton and keypointsfor coco datatset
+ palette = np.array([[255, 128, 0], [255, 153, 51], [255, 178, 102],
+ [230, 230, 0], [255, 153, 255], [153, 204, 255],
+ [255, 102, 255], [255, 51, 255], [102, 178, 255],
+ [51, 153, 255], [255, 153, 153], [255, 102, 102],
+ [255, 51, 51], [153, 255, 153], [102, 255, 102],
+ [51, 255, 51], [0, 255, 0], [0, 0, 255], [255, 0, 0],
+ [255, 255, 255]])
+
+ skeleton = [[16, 14], [14, 12], [17, 15], [15, 13], [12, 13], [6, 12],
+ [7, 13], [6, 7], [6, 8], [7, 9], [8, 10], [9, 11], [2, 3],
+ [1, 2], [1, 3], [2, 4], [3, 5], [4, 6], [5, 7]]
+
+ pose_limb_color = palette[[9, 9, 9, 9, 7, 7, 7, 0, 0, 0, 0, 0, 16, 16, 16, 16, 16, 16, 16]]
+ pose_kpt_color = palette[[16, 16, 16, 16, 16, 0, 0, 0, 0, 0, 0, 9, 9, 9, 9, 9, 9]]
+ radius = 5
+ num_kpts = len(kpts) // steps
+
+ for kid in range(num_kpts):
+ r, g, b = pose_kpt_color[kid]
+ x_coord, y_coord = kpts[steps * kid], kpts[steps * kid + 1]
+ if not (x_coord % 640 == 0 or y_coord % 640 == 0):
+ if steps == 3:
+ conf = kpts[steps * kid + 2]
+ if conf < 0.5:
+ continue
+ cv2.circle(im, (int(x_coord), int(y_coord)), radius, (int(r), int(g), int(b)), -1)
+
+ for sk_id, sk in enumerate(skeleton):
+ r, g, b = pose_limb_color[sk_id]
+ pos1 = (int(kpts[(sk[0]-1)*steps]), int(kpts[(sk[0]-1)*steps+1]))
+ pos2 = (int(kpts[(sk[1]-1)*steps]), int(kpts[(sk[1]-1)*steps+1]))
+ if steps == 3:
+ conf1 = kpts[(sk[0]-1)*steps+2]
+ conf2 = kpts[(sk[1]-1)*steps+2]
+ if conf1<0.5 or conf2<0.5:
+ continue
+ if pos1[0]%640 == 0 or pos1[1]%640==0 or pos1[0]<0 or pos1[1]<0:
+ continue
+ if pos2[0] % 640 == 0 or pos2[1] % 640 == 0 or pos2[0]<0 or pos2[1]<0:
+ continue
+ cv2.line(im, pos1, pos2, (int(r), int(g), int(b)), thickness=2)
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/torch_utils.py b/oneAPI_ODAV_APP/ENGINES/utils/torch_utils.py
new file mode 100644
index 000000000..311884e43
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/torch_utils.py
@@ -0,0 +1,375 @@
+# YOLOR PyTorch utils
+
+import datetime
+import logging
+import math
+import os
+import platform
+import subprocess
+import time
+from contextlib import contextmanager
+from copy import deepcopy
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+import torch.nn as nn
+import torch.nn.functional as F
+import torchvision
+
+
+try:
+ import thop # for FLOPS computation
+except ImportError:
+ thop = None
+logger = logging.getLogger(__name__)
+
+
+@contextmanager
+def torch_distributed_zero_first(local_rank: int):
+ """
+ Decorator to make all processes in distributed training wait for each local_master to do something.
+ """
+ if local_rank not in [-1, 0]:
+ torch.distributed.barrier()
+ yield
+ if local_rank == 0:
+ torch.distributed.barrier()
+
+
+def init_torch_seeds(seed=0):
+ # Speed-reproducibility tradeoff https://pytorch.org/docs/stable/notes/randomness.html
+ torch.manual_seed(seed)
+ if seed == 0: # slower, more reproducible
+ cudnn.benchmark, cudnn.deterministic = False, True
+ else: # faster, less reproducible
+ cudnn.benchmark, cudnn.deterministic = True, False
+
+
+def date_modified(path=__file__):
+ # return human-readable file modification date, i.e. '2021-3-26'
+ t = datetime.datetime.fromtimestamp(Path(path).stat().st_mtime)
+ return f'{t.year}-{t.month}-{t.day}'
+
+
+def git_describe(path=Path(__file__).parent): # path must be a directory
+ # return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
+ s = f'git -C {path} describe --tags --long --always'
+ try:
+ return subprocess.check_output(s, shell=True, stderr=subprocess.STDOUT).decode()[:-1]
+ except subprocess.CalledProcessError as e:
+ return '' # not a git repository
+
+
+def select_device(device='', batch_size=None):
+ # device = 'cpu' or '0' or '0,1,2,3'
+ s = f'YOLOR 🚀 {git_describe() or date_modified()} torch {torch.__version__} ' # string
+ cpu = device.lower() == 'cpu'
+ if cpu:
+ os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
+ elif device: # non-cpu device requested
+ os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable
+ assert torch.cuda.is_available(), f'CUDA unavailable, invalid device {device} requested' # check availability
+
+ cuda = not cpu and torch.cuda.is_available()
+ if cuda:
+ n = torch.cuda.device_count()
+ if n > 1 and batch_size: # check that batch_size is compatible with device_count
+ assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
+ space = ' ' * len(s)
+ for i, d in enumerate(device.split(',') if device else range(n)):
+ p = torch.cuda.get_device_properties(i)
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / 1024 ** 2}MB)\n" # bytes to MB
+ else:
+ s += 'CPU\n'
+
+ logger.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe
+ return torch.device('cuda:0' if cuda else 'cpu')
+
+
+def time_synchronized():
+ # pytorch-accurate time
+ if torch.cuda.is_available():
+ torch.cuda.synchronize()
+ return time.time()
+
+
+def profile(x, ops, n=100, device=None):
+ # profile a pytorch module or list of modules. Example usage:
+ # x = torch.randn(16, 3, 640, 640) # input
+ # m1 = lambda x: x * torch.sigmoid(x)
+ # m2 = nn.SiLU()
+ # profile(x, [m1, m2], n=100) # profile speed over 100 iterations
+
+ device = device or torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
+ x = x.to(device)
+ x.requires_grad = True
+ print(torch.__version__, device.type, torch.cuda.get_device_properties(0) if device.type == 'cuda' else '')
+ print(f"\n{'Params':>12s}{'GFLOPS':>12s}{'forward (ms)':>16s}{'backward (ms)':>16s}{'input':>24s}{'output':>24s}")
+ for m in ops if isinstance(ops, list) else [ops]:
+ m = m.to(device) if hasattr(m, 'to') else m # device
+ m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m # type
+ dtf, dtb, t = 0., 0., [0., 0., 0.] # dt forward, backward
+ try:
+ flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPS
+ except:
+ flops = 0
+
+ for _ in range(n):
+ t[0] = time_synchronized()
+ y = m(x)
+ t[1] = time_synchronized()
+ try:
+ _ = y.sum().backward()
+ t[2] = time_synchronized()
+ except: # no backward method
+ t[2] = float('nan')
+ dtf += (t[1] - t[0]) * 1000 / n # ms per op forward
+ dtb += (t[2] - t[1]) * 1000 / n # ms per op backward
+
+ s_in = tuple(x.shape) if isinstance(x, torch.Tensor) else 'list'
+ s_out = tuple(y.shape) if isinstance(y, torch.Tensor) else 'list'
+ p = sum(list(x.numel() for x in m.parameters())) if isinstance(m, nn.Module) else 0 # parameters
+ print(f'{p:12}{flops:12.4g}{dtf:16.4g}{dtb:16.4g}{str(s_in):>24s}{str(s_out):>24s}')
+
+
+def is_parallel(model):
+ return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
+
+
+def intersect_dicts(da, db, exclude=()):
+ # Dictionary intersection of matching keys and shapes, omitting 'exclude' keys, using da values
+ return {k: v for k, v in da.items() if k in db and not any(x in k for x in exclude) and v.shape == db[k].shape}
+
+
+def initialize_weights(model):
+ for m in model.modules():
+ t = type(m)
+ if t is nn.Conv2d:
+ pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
+ elif t is nn.BatchNorm2d:
+ m.eps = 1e-3
+ m.momentum = 0.03
+ elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6]:
+ m.inplace = True
+
+
+def find_modules(model, mclass=nn.Conv2d):
+ # Finds layer indices matching module class 'mclass'
+ return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
+
+
+def sparsity(model):
+ # Return global model sparsity
+ a, b = 0., 0.
+ for p in model.parameters():
+ a += p.numel()
+ b += (p == 0).sum()
+ return b / a
+
+
+def prune(model, amount=0.3):
+ # Prune model to requested global sparsity
+ import torch.nn.utils.prune as prune
+ print('Pruning model... ', end='')
+ for name, m in model.named_modules():
+ if isinstance(m, nn.Conv2d):
+ prune.l1_unstructured(m, name='weight', amount=amount) # prune
+ prune.remove(m, 'weight') # make permanent
+ print(' %.3g global sparsity' % sparsity(model))
+
+
+def fuse_conv_and_bn(conv, bn):
+ # Fuse convolution and batchnorm layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
+ fusedconv = nn.Conv2d(conv.in_channels,
+ conv.out_channels,
+ kernel_size=conv.kernel_size,
+ stride=conv.stride,
+ padding=conv.padding,
+ groups=conv.groups,
+ bias=True).requires_grad_(False).to(conv.weight.device)
+
+ # prepare filters
+ w_conv = conv.weight.clone().view(conv.out_channels, -1)
+ w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
+ fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
+
+ # prepare spatial bias
+ b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
+ b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
+ fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
+
+ return fusedconv
+
+
+def model_info(model, verbose=False, img_size=640):
+ # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
+ n_p = sum(x.numel() for x in model.parameters()) # number parameters
+ n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
+ if verbose:
+ print('%5s %40s %9s %12s %20s %10s %10s' % ('layer', 'name', 'gradient', 'parameters', 'shape', 'mu', 'sigma'))
+ for i, (name, p) in enumerate(model.named_parameters()):
+ name = name.replace('module_list.', '')
+ print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
+ (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
+
+ try: # FLOPS
+ from thop import profile
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32
+ img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input
+ flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPS
+ img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float
+ fs = ', %.1f GFLOPS' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPS
+ except (ImportError, Exception):
+ fs = ''
+
+ logger.info(f"Model Summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
+
+
+def load_classifier(name='resnet101', n=2):
+ # Loads a pretrained model reshaped to n-class output
+ model = torchvision.models.__dict__[name](pretrained=True)
+
+ # ResNet model properties
+ # input_size = [3, 224, 224]
+ # input_space = 'RGB'
+ # input_range = [0, 1]
+ # mean = [0.485, 0.456, 0.406]
+ # std = [0.229, 0.224, 0.225]
+
+ # Reshape output to n classes
+ filters = model.fc.weight.shape[1]
+ model.fc.bias = nn.Parameter(torch.zeros(n), requires_grad=True)
+ model.fc.weight = nn.Parameter(torch.zeros(n, filters), requires_grad=True)
+ model.fc.out_features = n
+ return model
+
+
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # scales img(bs,3,y,x) by ratio constrained to gs-multiple
+ if ratio == 1.0:
+ return img
+ else:
+ h, w = img.shape[2:]
+ s = (int(h * ratio), int(w * ratio)) # new size
+ img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
+ if not same_shape: # pad/crop img
+ h, w = [math.ceil(x * ratio / gs) * gs for x in (h, w)]
+ return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
+
+
+def copy_attr(a, b, include=(), exclude=()):
+ # Copy attributes from b to a, options to only include [...] and to exclude [...]
+ for k, v in b.__dict__.items():
+ if (len(include) and k not in include) or k.startswith('_') or k in exclude:
+ continue
+ else:
+ setattr(a, k, v)
+
+
+class ModelEMA:
+ """ Model Exponential Moving Average from https://github.com/rwightman/pytorch-image-models
+ Keep a moving average of everything in the model state_dict (parameters and buffers).
+ This is intended to allow functionality like
+ https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
+ A smoothed version of the weights is necessary for some training schemes to perform well.
+ This class is sensitive where it is initialized in the sequence of model init,
+ GPU assignment and distributed training wrappers.
+ """
+
+ def __init__(self, model, decay=0.9999, updates=0):
+ # Create EMA
+ self.ema = deepcopy(model.module if is_parallel(model) else model).eval() # FP32 EMA
+ # if next(model.parameters()).device.type != 'cpu':
+ # self.ema.half() # FP16 EMA
+ self.updates = updates # number of EMA updates
+ self.decay = lambda x: decay * (1 - math.exp(-x / 2000)) # decay exponential ramp (to help early epochs)
+ for p in self.ema.parameters():
+ p.requires_grad_(False)
+
+ def update(self, model):
+ # Update EMA parameters
+ with torch.no_grad():
+ self.updates += 1
+ d = self.decay(self.updates)
+
+ msd = model.module.state_dict() if is_parallel(model) else model.state_dict() # model state_dict
+ for k, v in self.ema.state_dict().items():
+ if v.dtype.is_floating_point:
+ v *= d
+ v += (1. - d) * msd[k].detach()
+
+ def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
+ # Update EMA attributes
+ copy_attr(self.ema, model, include, exclude)
+
+
+class BatchNormXd(torch.nn.modules.batchnorm._BatchNorm):
+ def _check_input_dim(self, input):
+ # The only difference between BatchNorm1d, BatchNorm2d, BatchNorm3d, etc
+ # is this method that is overwritten by the sub-class
+ # This original goal of this method was for tensor sanity checks
+ # If you're ok bypassing those sanity checks (eg. if you trust your inference
+ # to provide the right dimensional inputs), then you can just use this method
+ # for easy conversion from SyncBatchNorm
+ # (unfortunately, SyncBatchNorm does not store the original class - if it did
+ # we could return the one that was originally created)
+ return
+
+def revert_sync_batchnorm(module):
+ # this is very similar to the function that it is trying to revert:
+ # https://github.com/pytorch/pytorch/blob/c8b3686a3e4ba63dc59e5dcfe5db3430df256833/torch/nn/modules/batchnorm.py#L679
+ module_output = module
+ if isinstance(module, torch.nn.modules.batchnorm.SyncBatchNorm):
+ new_cls = BatchNormXd
+ module_output = BatchNormXd(module.num_features,
+ module.eps, module.momentum,
+ module.affine,
+ module.track_running_stats)
+ if module.affine:
+ with torch.no_grad():
+ module_output.weight = module.weight
+ module_output.bias = module.bias
+ module_output.running_mean = module.running_mean
+ module_output.running_var = module.running_var
+ module_output.num_batches_tracked = module.num_batches_tracked
+ if hasattr(module, "qconfig"):
+ module_output.qconfig = module.qconfig
+ for name, child in module.named_children():
+ module_output.add_module(name, revert_sync_batchnorm(child))
+ del module
+ return module_output
+
+
+class TracedModel(nn.Module):
+
+ def __init__(self, model=None, device=None, img_size=(640,640)):
+ super(TracedModel, self).__init__()
+
+ print(" Convert model to Traced-model... ")
+ self.stride = model.stride
+ self.names = model.names
+ self.model = model
+
+ self.model = revert_sync_batchnorm(self.model)
+ self.model.to('cpu')
+ self.model.eval()
+
+ self.detect_layer = self.model.model[-1]
+ self.model.traced = True
+
+ rand_example = torch.rand(1, 3, img_size, img_size)
+
+ traced_script_module = torch.jit.trace(self.model, rand_example, strict=False)
+ #traced_script_module = torch.jit.script(self.model)
+ traced_script_module.save("traced_model.pt")
+ print(" traced_script_module saved! ")
+ self.model = traced_script_module
+ self.model.to(device)
+ self.detect_layer.to(device)
+ print(" model is traced! \n")
+
+ def forward(self, x, augment=False, profile=False):
+ out = self.model(x)
+ out = self.detect_layer(out)
+ return out
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/__init__.py b/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/__init__.py
new file mode 100644
index 000000000..a6131c10e
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/__init__.py
@@ -0,0 +1 @@
+# init
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/log_dataset.py b/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/log_dataset.py
new file mode 100644
index 000000000..600598f3e
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/log_dataset.py
@@ -0,0 +1,25 @@
+import argparse
+
+import yaml
+
+
+from wandb_utils import WandbLogger
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ with open(opt.data) as f:
+ data = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ logger = WandbLogger(opt, '', None, data, job_type='Dataset Creation')
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOR', help='name of W&B Project')
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/wandb_utils.py b/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/wandb_utils.py
new file mode 100644
index 000000000..22eb58533
--- /dev/null
+++ b/oneAPI_ODAV_APP/ENGINES/utils/wandb_logging/wandb_utils.py
@@ -0,0 +1,307 @@
+import json
+import sys
+from pathlib import Path
+
+
+import torch
+import yaml
+from tqdm import tqdm
+
+sys.path.append(str(Path(__file__).parent.parent.parent)) # add utils/ to path
+from utils.datasets import LoadImagesAndLabels
+from utils.datasets import img2label_paths
+from utils.general import colorstr, xywh2xyxy, check_dataset
+
+try:
+ import wandb
+ from wandb import init, finish
+except ImportError:
+ wandb = None
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):
+ return from_string[len(prefix):]
+
+
+def check_wandb_config_file(data_config_file):
+ wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path
+ if Path(wandb_config).is_file():
+ return wandb_config
+ return data_config_file
+
+
+def get_run_info(run_path):
+ run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))
+ run_id = run_path.stem
+ project = run_path.parent.stem
+ model_artifact_name = 'run_' + run_id + '_model'
+ return run_id, project, model_artifact_name
+
+
+def check_wandb_resume(opt):
+ process_wandb_config_ddp_mode(opt) if opt.global_rank not in [-1, 0] else None
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ if opt.global_rank not in [-1, 0]: # For resuming DDP runs
+ run_id, project, model_artifact_name = get_run_info(opt.resume)
+ api = wandb.Api()
+ artifact = api.artifact(project + '/' + model_artifact_name + ':latest')
+ modeldir = artifact.download()
+ opt.weights = str(Path(modeldir) / "last.pt")
+ return True
+ return None
+
+
+def process_wandb_config_ddp_mode(opt):
+ with open(opt.data) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ train_dir, val_dir = None, None
+ if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)
+ train_dir = train_artifact.download()
+ train_path = Path(train_dir) / 'data/images/'
+ data_dict['train'] = str(train_path)
+
+ if isinstance(data_dict['val'], str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ val_artifact = api.artifact(remove_prefix(data_dict['val']) + ':' + opt.artifact_alias)
+ val_dir = val_artifact.download()
+ val_path = Path(val_dir) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ if train_dir or val_dir:
+ ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')
+ with open(ddp_data_path, 'w') as f:
+ yaml.dump(data_dict, f)
+ opt.data = ddp_data_path
+
+
+class WandbLogger():
+ def __init__(self, opt, name, run_id, data_dict, job_type='Training'):
+ # Pre-training routine --
+ self.job_type = job_type
+ self.wandb, self.wandb_run, self.data_dict = wandb, None if not wandb else wandb.run, data_dict
+ # It's more elegant to stick to 1 wandb.init call, but useful config data is overwritten in the WandbLogger's wandb.init call
+ if isinstance(opt.resume, str): # checks resume from artifact
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ run_id, project, model_artifact_name = get_run_info(opt.resume)
+ model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name
+ assert wandb, 'install wandb to resume wandb runs'
+ # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config
+ self.wandb_run = wandb.init(id=run_id, project=project, resume='allow')
+ opt.resume = model_artifact_name
+ elif self.wandb:
+ self.wandb_run = wandb.init(config=opt,
+ resume="allow",
+ project='YOLOR' if opt.project == 'runs/train' else Path(opt.project).stem,
+ name=name,
+ job_type=job_type,
+ id=run_id) if not wandb.run else wandb.run
+ if self.wandb_run:
+ if self.job_type == 'Training':
+ if not opt.resume:
+ wandb_data_dict = self.check_and_upload_dataset(opt) if opt.upload_dataset else data_dict
+ # Info useful for resuming from artifacts
+ self.wandb_run.config.opt = vars(opt)
+ self.wandb_run.config.data_dict = wandb_data_dict
+ self.data_dict = self.setup_training(opt, data_dict)
+ if self.job_type == 'Dataset Creation':
+ self.data_dict = self.check_and_upload_dataset(opt)
+ else:
+ prefix = colorstr('wandb: ')
+ print(f"{prefix}Install Weights & Biases for YOLOR logging with 'pip install wandb' (recommended)")
+
+ def check_and_upload_dataset(self, opt):
+ assert wandb, 'Install wandb to upload dataset'
+ check_dataset(self.data_dict)
+ config_path = self.log_dataset_artifact(opt.data,
+ opt.single_cls,
+ 'YOLOR' if opt.project == 'runs/train' else Path(opt.project).stem)
+ print("Created dataset config file ", config_path)
+ with open(config_path) as f:
+ wandb_data_dict = yaml.load(f, Loader=yaml.SafeLoader)
+ return wandb_data_dict
+
+ def setup_training(self, opt, data_dict):
+ self.log_dict, self.current_epoch, self.log_imgs = {}, 0, 16 # Logging Constants
+ self.bbox_interval = opt.bbox_interval
+ if isinstance(opt.resume, str):
+ modeldir, _ = self.download_model_artifact(opt)
+ if modeldir:
+ self.weights = Path(modeldir) / "last.pt"
+ config = self.wandb_run.config
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp = str(
+ self.weights), config.save_period, config.total_batch_size, config.bbox_interval, config.epochs, \
+ config.opt['hyp']
+ data_dict = dict(self.wandb_run.config.data_dict) # eliminates the need for config file to resume
+ if 'val_artifact' not in self.__dict__: # If --upload_dataset is set, use the existing artifact, don't download
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(data_dict.get('train'),
+ opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(data_dict.get('val'),
+ opt.artifact_alias)
+ self.result_artifact, self.result_table, self.val_table, self.weights = None, None, None, None
+ if self.train_artifact_path is not None:
+ train_path = Path(self.train_artifact_path) / 'data/images/'
+ data_dict['train'] = str(train_path)
+ if self.val_artifact_path is not None:
+ val_path = Path(self.val_artifact_path) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ self.val_table = self.val_artifact.get("val")
+ self.map_val_table_path()
+ if self.val_artifact is not None:
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+ self.result_table = wandb.Table(["epoch", "id", "prediction", "avg_confidence"])
+ if opt.bbox_interval == -1:
+ self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ return data_dict
+
+ def download_dataset_artifact(self, path, alias):
+ if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):
+ dataset_artifact = wandb.use_artifact(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + ":" + alias)
+ assert dataset_artifact is not None, "'Error: W&B dataset artifact doesn\'t exist'"
+ datadir = dataset_artifact.download()
+ return datadir, dataset_artifact
+ return None, None
+
+ def download_model_artifact(self, opt):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
+ assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
+ modeldir = model_artifact.download()
+ epochs_trained = model_artifact.metadata.get('epochs_trained')
+ total_epochs = model_artifact.metadata.get('total_epochs')
+ assert epochs_trained < total_epochs, 'training to %g epochs is finished, nothing to resume.' % (
+ total_epochs)
+ return modeldir, model_artifact
+ return None, None
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model', type='model', metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score
+ })
+ model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
+ wandb.log_artifact(model_artifact,
+ aliases=['latest', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
+ print("Saving model artifact on epoch ", epoch + 1)
+
+ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):
+ with open(data_file) as f:
+ data = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])
+ names = {k: v for k, v in enumerate(names)} # to index dictionary
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['train']), names, name='train') if data.get('train') else None
+ self.val_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['val']), names, name='val') if data.get('val') else None
+ if data.get('train'):
+ data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
+ if data.get('val'):
+ data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
+ path = data_file if overwrite_config else '_wandb.'.join(data_file.rsplit('.', 1)) # updated data.yaml path
+ data.pop('download', None)
+ with open(path, 'w') as f:
+ yaml.dump(data, f)
+
+ if self.job_type == 'Training': # builds correct artifact pipeline graph
+ self.wandb_run.use_artifact(self.val_artifact)
+ self.wandb_run.use_artifact(self.train_artifact)
+ self.val_artifact.wait()
+ self.val_table = self.val_artifact.get('val')
+ self.map_val_table_path()
+ else:
+ self.wandb_run.log_artifact(self.train_artifact)
+ self.wandb_run.log_artifact(self.val_artifact)
+ return path
+
+ def map_val_table_path(self):
+ self.val_table_map = {}
+ print("Mapping dataset")
+ for i, data in enumerate(tqdm(self.val_table.data)):
+ self.val_table_map[data[3]] = data[0]
+
+ def create_dataset_table(self, dataset, class_to_id, name='dataset'):
+ # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
+ artifact = wandb.Artifact(name=name, type="dataset")
+ img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
+ img_files = tqdm(dataset.img_files) if not img_files else img_files
+ for img_file in img_files:
+ if Path(img_file).is_dir():
+ artifact.add_dir(img_file, name='data/images')
+ labels_path = 'labels'.join(dataset.path.rsplit('images', 1))
+ artifact.add_dir(labels_path, name='data/labels')
+ else:
+ artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
+ label_file = Path(img2label_paths([img_file])[0])
+ artifact.add_file(str(label_file),
+ name='data/labels/' + label_file.name) if label_file.exists() else None
+ table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
+ for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
+ height, width = shapes[0]
+ labels[:, 2:] = (xywh2xyxy(labels[:, 2:].view(-1, 4))) * torch.Tensor([width, height, width, height])
+ box_data, img_classes = [], {}
+ for cls, *xyxy in labels[:, 1:].tolist():
+ cls = int(cls)
+ box_data.append({"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls]),
+ "scores": {"acc": 1},
+ "domain": "pixel"})
+ img_classes[cls] = class_to_id[cls]
+ boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
+ table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), json.dumps(img_classes),
+ Path(paths).name)
+ artifact.add(table, name)
+ return artifact
+
+ def log_training_progress(self, predn, path, names):
+ if self.val_table and self.result_table:
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])
+ box_data = []
+ total_conf = 0
+ for *xyxy, conf, cls in predn.tolist():
+ if conf >= 0.25:
+ box_data.append(
+ {"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": "%s %.3f" % (names[cls], conf),
+ "scores": {"class_score": conf},
+ "domain": "pixel"})
+ total_conf = total_conf + conf
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ id = self.val_table_map[Path(path).name]
+ self.result_table.add_data(self.current_epoch,
+ id,
+ wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
+ total_conf / max(1, len(box_data))
+ )
+
+ def log(self, log_dict):
+ if self.wandb_run:
+ for key, value in log_dict.items():
+ self.log_dict[key] = value
+
+ def end_epoch(self, best_result=False):
+ if self.wandb_run:
+ wandb.log(self.log_dict)
+ self.log_dict = {}
+ if self.result_artifact:
+ train_results = wandb.JoinedTable(self.val_table, self.result_table, "id")
+ self.result_artifact.add(train_results, 'result')
+ wandb.log_artifact(self.result_artifact, aliases=['latest', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
+ self.result_table = wandb.Table(["epoch", "id", "prediction", "avg_confidence"])
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+
+ def finish_run(self):
+ if self.wandb_run:
+ if self.log_dict:
+ wandb.log(self.log_dict)
+ wandb.run.finish()
diff --git a/oneAPI_ODAV_APP/Model/read.txt b/oneAPI_ODAV_APP/Model/read.txt
new file mode 100644
index 000000000..7391e9086
--- /dev/null
+++ b/oneAPI_ODAV_APP/Model/read.txt
@@ -0,0 +1,2 @@
+Download the Trained Models and Test_Video Folder from google Drive link given below and extract it inside Neom_App Folder
+https://drive.google.com/file/d/1YXf8kMjowu28J5Z_ZPXoRIDABRKzmHis/view?usp=sharing
diff --git a/oneAPI_ODAV_APP/TEST_VIDEO/Visual_Pollution.mp4 b/oneAPI_ODAV_APP/TEST_VIDEO/Visual_Pollution.mp4
new file mode 100644
index 000000000..d5720a69f
Binary files /dev/null and b/oneAPI_ODAV_APP/TEST_VIDEO/Visual_Pollution.mp4 differ
diff --git a/oneAPI_ODAV_APP/favicon.ico b/oneAPI_ODAV_APP/favicon.ico
new file mode 100644
index 000000000..6f55c8a52
Binary files /dev/null and b/oneAPI_ODAV_APP/favicon.ico differ
diff --git a/oneAPI_ODAV_APP/home.py b/oneAPI_ODAV_APP/home.py
new file mode 100644
index 000000000..d5ecb4c5f
--- /dev/null
+++ b/oneAPI_ODAV_APP/home.py
@@ -0,0 +1,866 @@
+import tkinter as tk
+import tkinter.ttk as ttk
+from tkinter import messagebox, Frame, filedialog, Label, DISABLED, ACTIVE
+from PIL import Image, ImageTk, ImageGrab
+import configparser
+import json
+import pybboxes as pbx
+import geocoder
+import time
+import cv2
+from datetime import datetime
+
+
+class CreateToolTip(object):
+
+ def __init__(self, widget, text='widget info'):
+ self.waittime = 500
+ self.wraplength = 180
+ self.widget = widget
+ self.text = text
+ self.widget.bind("", self.enter)
+ self.widget.bind("", self.leave)
+ self.widget.bind("", self.leave)
+ self.id = None
+ self.tw = None
+
+ def enter(self, event=None):
+ self.schedule()
+
+ def leave(self, event=None):
+ self.unschedule()
+ self.hidetip()
+
+ def schedule(self):
+ self.unschedule()
+ self.id = self.widget.after(self.waittime, self.showtip)
+
+ def unschedule(self):
+ id = self.id
+ self.id = None
+ if id:
+ self.widget.after_cancel(id)
+
+ def showtip(self, event=None):
+ x = y = 0
+ x, y, cx, cy = self.widget.bbox("insert")
+ x += self.widget.winfo_rootx() + 25
+ y += self.widget.winfo_rooty() + 20
+ self.tw = tk.Toplevel(self.widget)
+ self.tw.wm_overrideredirect(True)
+ self.tw.wm_geometry("+%d+%d" % (x, y))
+ label = tk.Label(self.tw, text=self.text, justify='left',
+ background="#ffffff", relief='solid', borderwidth=1,
+ wraplength=self.wraplength)
+ label.pack(ipadx=1)
+
+ def hidetip(self):
+ tw = self.tw
+ self.tw = None
+ if tw:
+ tw.destroy()
+
+
+focus_area = []
+
+
+class MousePositionTracker(tk.Frame):
+ """ Tkinter Canvas mouse position widget. """
+
+ def __init__(self, canvas):
+ self.canvas = canvas
+ self.canv_width = self.canvas.cget('width')
+ self.canv_height = self.canvas.cget('height')
+ self.reset()
+
+ # Create canvas cross-hair lines.
+ xhair_opts = dict(dash=(3, 2), fill='white', state=tk.HIDDEN)
+ self.lines = (self.canvas.create_line(0, 0, 0, self.canv_height, **xhair_opts),
+ self.canvas.create_line(0, 0, self.canv_width, 0, **xhair_opts))
+
+ def cur_selection(self):
+ return (self.start, self.end)
+
+ def begin(self, event):
+ self.hide()
+ self.start = (event.x, event.y) # Remember position (no drawing).
+
+ def update(self, event):
+ self.end = (event.x, event.y)
+ self._update(event)
+ self._command(self.start, (event.x, event.y)) # User callback.
+
+ def _update(self, event):
+ # Update cross-hair lines.
+ self.canvas.coords(self.lines[0], event.x, 0, event.x, self.canv_height)
+ self.canvas.coords(self.lines[1], 0, event.y, self.canv_width, event.y)
+ self.show()
+
+ def reset(self):
+ self.start = self.end = None
+
+ def hide(self):
+ self.canvas.itemconfigure(self.lines[0], state=tk.HIDDEN)
+ self.canvas.itemconfigure(self.lines[1], state=tk.HIDDEN)
+
+ def show(self):
+ self.canvas.itemconfigure(self.lines[0], state=tk.NORMAL)
+ self.canvas.itemconfigure(self.lines[1], state=tk.NORMAL)
+
+ def autodraw(self, command=lambda *args: None):
+ """Setup automatic drawing; supports command option"""
+ self.reset()
+ self._command = command
+ self.canvas.bind("", self.begin)
+ self.canvas.bind("", self.update)
+ self.canvas.bind("", self.quit)
+
+ def quit(self, event):
+ self.hide() # Hide cross-hairs.
+ self.reset()
+
+
+class SelectionObject:
+ """ Widget to display a rectangular area on given canvas defined by two points
+ representing its diagonal.
+ """
+
+ def __init__(self, canvas, select_opts):
+ # Create attributes needed to display selection.
+ self.canvas = canvas
+ self.select_opts1 = select_opts
+ self.width = self.canvas.cget('width')
+ self.height = self.canvas.cget('height')
+
+ # Options for areas outside rectanglar selection.
+ select_opts1 = self.select_opts1.copy() # Avoid modifying passed argument.
+ select_opts1.update(state=tk.HIDDEN) # Hide initially.
+ # Separate options for area inside rectanglar selection.
+ select_opts2 = dict(dash=(2, 2), fill='', outline='white', state=tk.HIDDEN)
+
+ # Initial extrema of inner and outer rectangles.
+ imin_x, imin_y, imax_x, imax_y = 0, 0, 1, 1
+ omin_x, omin_y, omax_x, omax_y = 0, 0, self.width, self.height
+
+ self.rects = (
+ # Area *outside* selection (inner) rectangle.
+ self.canvas.create_rectangle(omin_x, omin_y, omax_x, imin_y, **select_opts1),
+ self.canvas.create_rectangle(omin_x, imin_y, imin_x, imax_y, **select_opts1),
+ self.canvas.create_rectangle(imax_x, imin_y, omax_x, imax_y, **select_opts1),
+ self.canvas.create_rectangle(omin_x, imax_y, omax_x, omax_y, **select_opts1),
+ # Inner rectangle.
+ self.canvas.create_rectangle(imin_x, imin_y, imax_x, imax_y, **select_opts2)
+ )
+
+ def update(self, start, end):
+ # Current extrema of inner and outer rectangles.
+ imin_x, imin_y, imax_x, imax_y = self._get_coords(start, end)
+ omin_x, omin_y, omax_x, omax_y = 0, 0, self.width, self.height
+
+ # Update coords of all rectangles based on these extrema.
+ self.canvas.coords(self.rects[0], omin_x, omin_y, omax_x, imin_y),
+ self.canvas.coords(self.rects[1], omin_x, imin_y, imin_x, imax_y),
+ self.canvas.coords(self.rects[2], imax_x, imin_y, omax_x, imax_y),
+ self.canvas.coords(self.rects[3], omin_x, imax_y, omax_x, omax_y),
+ self.canvas.coords(self.rects[4], imin_x, imin_y, imax_x, imax_y),
+
+ for rect in self.rects: # Make sure all are now visible.
+ self.canvas.itemconfigure(rect, state=tk.NORMAL)
+
+ def _get_coords(self, start, end):
+ """ Determine coords of a polygon defined by the start and
+ end points one of the diagonals of a rectangular area.
+ """
+
+ focus_area = [min((start[0], end[0])), min((start[1], end[1])), max((start[0], end[0])),
+ max((start[1], end[1]))]
+
+ return (focus_area)
+
+ def hide(self):
+ for rect in self.rects:
+ self.canvas.itemconfigure(rect, state=tk.HIDDEN)
+
+
+version = '1.0.1'
+
+
+def main():
+ def loading():
+ rootx = tk.Tk()
+ rootx.iconbitmap(default='Data/Images/icons/favicon.ico')
+ rootx.image = tk.PhotoImage(file='Data/Images/Background/load.gif')
+ labelx = tk.Label(rootx, image=rootx.image, bg='white')
+ rootx.overrideredirect(True)
+ rootx.geometry("+600+100")
+ rootx.wm_attributes("-topmost", True)
+ rootx.wm_attributes("-disabled", True)
+ rootx.wm_attributes("-transparentcolor", "white")
+ labelx.pack()
+ labelx.after(500, lambda: labelx.destroy())
+ rootx.after(500, lambda: rootx.destroy()) # Destroy the widget after 0.5 seconds
+ labelx.mainloop()
+
+ for i in range(0, 1):
+ loading()
+
+ def display():
+
+ class Store_DATA_IN_INI:
+
+ def __init__(self, win):
+
+ load = cv2.imread('Data/Images/Background/background.jpg', 1)
+ cv2imagex1 = cv2.cvtColor(load, cv2.COLOR_BGR2RGBA)
+ load = Image.fromarray(cv2imagex1)
+ regx = tk.Tk()
+ load = load.resize((int(regx.winfo_screenwidth()), int(regx.winfo_screenheight())), Image.LANCZOS)
+
+ render = ImageTk.PhotoImage(load)
+ img = tk.Label(image=render)
+ img.image = render
+ img.place(x=-1, y=0)
+
+ load = cv2.imread('Data/Images/Background/logo.png', 1)
+ cv2imagex1 = cv2.cvtColor(load, cv2.COLOR_BGR2RGBA)
+ load = Image.fromarray(cv2imagex1)
+ load = load.resize((int(250), int(160)), Image.LANCZOS)
+ render = ImageTk.PhotoImage(load)
+ img = tk.Label(image=render)
+ img.image = render
+ img.place(x=1665, y=0)
+
+ self.b0 = tk.Button(win,
+ bg='#f7421e',
+ fg='#b7f731',
+ relief='flat',
+ width=20, command=self.quit)
+ self.b0.place(x=0, y=0, width=150, height=150)
+
+ self.b0b = tk.Button(win,
+ bg='#33ff00',
+ fg='#b7f731',
+ relief='flat',
+ width=100, command=self.settings)
+ self.b0b.place(x=1770, y=950, width=150, height=150)
+
+ self.b1 = ttk.Button(win, text='Live Dash Cam with Segmentation', width=20, command=self.pot_holes)
+ self.b1.place(x=90, y=470, width=300, height=100)
+
+ self.b2 = ttk.Button(win, text='Uploaded Data Viewer', width=20, command=self.data_viewer)
+ self.b2.place(x=300, y=780, width=300, height=100)
+
+ self.b3 = ttk.Button(win, text='Live Dash Cam', width=20, command=self.dash_cam)
+ self.b3.place(x=1400, y=220, width=300, height=100)
+
+ self.b4 = ttk.Button(win, text='Detect Picture', width=20, command=self.label_picture)
+ self.b4.place(x=1480, y=530, width=300, height=100)
+
+ regx.destroy()
+
+ def settings(self):
+
+ class TOKENS:
+
+ def __init__(self, tokens):
+
+ config = configparser.ConfigParser()
+ config.read('Data/Keys/config.ini')
+ config_token = config.items('TOKEN')
+ TOKEN = str(config_token[0][1])
+ UP_URL = str(config_token[1][1])
+
+ self.lbl = tk.Label(tokens, text="TOKEN", font=("Helvetica", 30, 'bold'), bg='white')
+ self.lbl.place(x=60, y=70)
+
+ self.txtfld1 = ttk.Combobox(tokens, font=("Helvetica", 30, 'bold'))
+ self.txtfld1.place(x=220, y=70, width=550)
+ self.txtfld1.set(TOKEN)
+
+ self.lb2 = tk.Label(tokens, text="USER", font=("Helvetica", 30, 'bold'), bg='white')
+ self.lb2.place(x=60, y=170)
+
+ self.txtfld2 = ttk.Combobox(tokens, font=("Helvetica", 30, 'bold'))
+ self.txtfld2.place(x=220, y=170, width=550)
+ self.txtfld2.set(UP_URL)
+
+ self.btn = ttk.Button(tokens, text="UPDATE", width=20, command=self.token_validate)
+ self.btn.place(x=500, y=250, width=270, height=50)
+
+ def token_validate(self):
+ if (str(self.txtfld1.get()) != "") and (str(self.txtfld2.get()) != ""):
+
+ config = configparser.ConfigParser()
+ config.write('Data/Keys/config.ini')
+
+ file = open('Data/Keys/config.ini', "w+")
+
+ config.add_section('TOKEN')
+ config.set('TOKEN', 'TOKEN', str(self.txtfld1.get()))
+ config.set('TOKEN', 'UP_URL', str(self.txtfld2.get()))
+
+ config.write(file)
+ file.close()
+
+ tk.messagebox.showinfo("Success", "Updated Successfully")
+
+ tokens_user_login.destroy()
+
+ else:
+ tk.messagebox.showerror("Error", "EMPTY VALUES")
+
+ @staticmethod
+ def quit():
+ tokens_user_login.destroy()
+
+ tokens_user_login = tk.Tk()
+ tokens_user_login.config(background='white')
+ tokens_user_login.attributes('-alpha', 0.9)
+
+ TOKENS(tokens_user_login)
+ tokens_user_login.iconbitmap(default='Data/Images/icons/favicon.ico')
+ tokens_user_login.title('oneAPI_ODAV Car Dashboard Settings ' + version)
+ tokens_user_login.geometry("850x350")
+ tokens_user_login.mainloop()
+
+ @staticmethod
+ def quit():
+ window_user_login1.destroy()
+ exit(0)
+
+ def pot_holes(self):
+ import torch
+ with torch.no_grad():
+ from ENGINES import AI_POTHOLES_DETECTION
+ AI_POTHOLES_DETECTION.AI_POTHOLES_DETECTION(source="TEST_VIDEO/testx.mp4",
+ model_weights="Model/yolov7.pt")
+ # window_user_login1.destroy()
+ # second(user_key=user_key, job="HOSTEL ENVIRONMENT")
+
+ def data_viewer(self):
+ window_user_login1.destroy()
+ data_viewer()
+
+ def dash_cam(self):
+ import torch
+ with torch.no_grad():
+ from ENGINES import AI_DASH_CAM
+ AI_DASH_CAM.AI_DASH_CAM(source="TEST_VIDEO/testx.mp4",
+ model_weights="Model/yolov7.pt")
+ # window_user_login1.destroy()
+ # second(user_key=user_key, job="BUS ENVIRONMENT")
+
+ def label_picture(self):
+ filename = filedialog.askopenfilename(initialdir="/",
+ title="Select a image File",
+ filetypes=(("Image files",
+ "*.jpg"),
+ ("Image files",
+ "*.jpeg*"),
+ ("Image files",
+ "*.png*")
+ ))
+ import torch
+ from ENGINES import AI_DASH_CAM_IMAGE
+ AI_DASH_CAM_IMAGE.AI_DASH_CAM_IMAGE(filename, model_weights="Model/yolov7.pt")
+ # second(user_key=user_key, job="EXAM ENVIRONMENT")
+
+ @staticmethod
+ def start(self):
+ window_user_login1.destroy()
+ # second(user_key=user_key, job="START ENVIRONMENT")
+
+ window_user_login1 = tk.Tk()
+ window_user_login1.config(background='#EFEFEF')
+ window_user_login1.attributes('-fullscreen', True)
+
+ Store_DATA_IN_INI(window_user_login1)
+ window_user_login1.iconbitmap(default='Data/Images/icons/favicon.ico')
+ window_user_login1.title('oneAPI_ADAV')
+ window_user_login1.mainloop()
+
+ def data_viewer():
+
+ class View_Image(tk.Frame):
+
+ # Default selection object options.
+ SELECT_OPTS = dict(dash=(2, 2), stipple='gray25', fill='red',
+ outline='')
+
+ def __init__(self, win, *args, **kwargs):
+ super().__init__(win, *args, **kwargs)
+
+ self.label_class = {0: 'person', 1: 'bicycle', 2: 'car', 3: 'motorcycle', 4: 'airplane', 5: 'bus',
+ 6: 'train', 7: 'truck', 8: 'boat', 9: 'traffic light',
+ 10: 'fire hydrant', 11: 'stop sign', 12: 'parking meter', 13: 'bench', 14: 'bird',
+ 15: 'cat', 16: 'dog', 17: 'horse', 18: 'sheep', 19: 'cow',
+ 20: 'elephant', 21: 'bear', 22: 'zebra', 23: 'giraffe', 24: 'backpack',
+ 25: 'umbrella',
+ 26: 'handbag', 27: 'tie', 28: 'suitcase', 29: 'frisbee',
+ 30: 'skis', 31: 'snowboard', 32: 'sports ball', 33: 'kite', 34: 'baseball bat',
+ 35: 'baseball glove', 36: 'skateboard', 37: 'surfboard',
+ 38: 'tennis racket', 39: 'bottle', 40: 'wine glass', 41: 'cup', 42: 'fork',
+ 43: 'knife',
+ 44: 'spoon', 45: 'bowl', 46: 'banana', 47: 'apple',
+ 48: 'sandwich', 49: 'orange', 50: 'broccoli', 51: 'carrot', 52: 'hot dog',
+ 53: 'pizza',
+ 54: 'donut', 55: 'cake', 56: 'chair', 57: 'couch',
+ 58: 'potted plant', 59: 'bed', 60: 'dining table', 61: 'toilet', 62: 'tv',
+ 63: 'laptop',
+ 64: 'mouse', 65: 'remote', 66: 'keyboard', 67: 'cell phone',
+ 68: 'microwave', 69: 'oven', 70: 'toaster', 71: 'sink', 72: 'refrigerator',
+ 73: 'book',
+ 74: 'clock', 75: 'vase', 76: 'scissors', 77: 'teddy bear',
+ 78: 'hair drier', 79: 'toothbrush'}
+
+ self.image_class = {'person': 0, 'bicycle': 1, 'car': 2, 'motorcycle': 3, 'airplane': 4, 'bus': 5,
+ 'train': 6, 'truck': 7, 'boat': 8, 'traffic light': 9,
+ 'fire hydrant': 10, 'stop sign': 11, 'parking meter': 12, 'bench': 13, 'bird': 14,
+ 'cat': 15, 'dog': 16, 'horse': 17, 'sheep': 18, 'cow': 19,
+ 'elephant': 20, 'bear': 21, 'zebra': 22, 'giraffe': 23, 'backpack': 24,
+ 'umbrella': 25,
+ 'handbag': 26, 'tie': 27, 'suitcase': 28, 'frisbee': 29,
+ 'skis': 30, 'snowboard': 31, 'sports ball': 32, 'kite': 33, 'baseball bat': 34,
+ 'baseball glove': 35, 'skateboard': 36, 'surfboard': 37,
+ 'tennis racket': 38, 'bottle': 39, 'wine glass': 40, 'cup': 41, 'fork': 42,
+ 'knife': 43,
+ 'spoon': 44, 'bowl': 45, 'banana': 46, 'apple': 47,
+ 'sandwich': 48, 'orange': 49, 'broccoli': 50, 'carrot': 51, 'hot dog': 52,
+ 'pizza': 53,
+ 'donut': 54, 'cake': 55, 'chair': 56, 'couch': 57,
+ 'potted plant': 58, 'bed': 59, 'dining table': 60, 'toilet': 61, 'tv': 62,
+ 'laptop': 63,
+ 'mouse': 64, 'remote': 65, 'keyboard': 66, 'cell phone': 67,
+ 'microwave': 68, 'oven': 69, 'toaster': 70, 'sink': 71, 'refrigerator': 72,
+ 'book': 73,
+ 'clock': 74, 'vase': 75, 'scissors': 76, 'teddy bear': 77,
+ 'hair drier': 78, 'toothbrush': 79}
+
+ selected_values = ["", "", "", "", "", "", "", "", "", "", ""]
+
+ def on_drag(start, end, **kwarg): # Must accept these arguments.
+ self.selection_obj.update(start, end)
+ focus_area = self.selection_obj._get_coords(start, end)
+
+ print(focus_area)
+
+ x1, y1, x2, y2 = pbx.convert_bbox(focus_area, from_type="voc", to_type="yolo",
+ image_size=(665, 600))
+
+ print(x1, y1, x2, y2)
+
+ if x1 != 0.5 and y1 != 0.5 and x2 != 1.0 and y2 != 1.0:
+ self.txtfld3.set(str(x1))
+ self.txtfld4.set(str(y1))
+ self.txtfld5.set(str(x2))
+ self.txtfld6.set(str(y2))
+
+ def open_image_file():
+ filename = filedialog.askopenfilename(initialdir="/",
+ title="Select a image File",
+ filetypes=(("Image files",
+ "*.jpg"),
+ ("Image files",
+ "*.jpeg*"),
+ ("Image files",
+ "*.png*")
+ ))
+ new_camera(filename)
+
+ def new_camera(path=0):
+
+ vid = cv2.VideoCapture(path)
+
+ # Declare the width and height in variables
+ wi, hi = 665, 600
+
+ # Set the width and height
+ vid.set(cv2.CAP_PROP_FRAME_WIDTH, wi)
+ vid.set(cv2.CAP_PROP_FRAME_HEIGHT, hi)
+
+ _, frame = vid.read()
+
+ # Convert image from one color space to other
+ opencv_image = cv2.cvtColor(frame, cv2.COLOR_BGR2RGBA)
+
+ # Capture the latest frame and transform to image
+ captured_image = Image.fromarray(opencv_image).resize((665, 600), Image.LANCZOS)
+
+ # Convert captured image to photoimage
+ photo_image = ImageTk.PhotoImage(image=captured_image)
+
+ self.canvas = tk.Canvas(win, width=wi, height=hi,
+ scrollregion=(0, 0, 500, 500))
+ self.canvas.place(x=1250, y=150)
+
+ self.canvas.create_image(0, 0, image=photo_image, anchor=tk.NW)
+ self.canvas.img = photo_image # Keep reference.
+
+ # Create selection object to show current selection boundaries.
+ self.selection_obj = SelectionObject(self.canvas, self.SELECT_OPTS)
+
+ # Callback function to update it given two points of its diagonal.
+
+ # Create mouse position tracker that uses the function.
+ self.posn_tracker = MousePositionTracker(self.canvas)
+ self.posn_tracker.autodraw(command=on_drag) # Enable callbacks.
+
+ latitude, longitude = geocoder.ip('me').latlng
+
+ config = configparser.ConfigParser()
+ config.read('Data/Keys/config.ini')
+ config_token = config.items('TOKEN')
+ UP_URL = str(config_token[1][1])
+
+ self.txtfld1.set(UP_URL)
+ self.txtfld2.set("")
+ self.txtfld3.set("")
+ self.txtfld4.set("")
+ self.txtfld5.set("")
+ self.txtfld6.set("")
+ self.txtfld7.set(latitude)
+ self.txtfld8.set(longitude)
+
+ self.btn_submit.config(state=ACTIVE)
+ vid.release()
+
+ def selectItem(a):
+ curItem = self.tree.focus()
+
+ selected_values = (self.tree.item(curItem)['values'])
+
+ path = selected_values[2]
+
+ if path == "":
+ path = "Data/Images/Background/no_image.jpg"
+
+ imgx = ImageTk.PhotoImage(Image.open(path))
+
+ width = imgx.width() / 665
+ height = imgx.height() / 600
+
+ wi, hi = imgx.width(), imgx.height()
+
+ img = ImageTk.PhotoImage(Image.open(path).resize((665, 600), Image.LANCZOS))
+
+ self.canvas = tk.Canvas(win, width=img.width(), height=img.height(),
+ scrollregion=(0, 0, 500, 500))
+ self.canvas.place(x=1250, y=150)
+
+ self.canvas.create_image(0, 0, image=img, anchor=tk.NW)
+ self.canvas.img = img # Keep reference.
+
+ # Create selection object to show current selection boundaries.
+ self.selection_obj = SelectionObject(self.canvas, self.SELECT_OPTS)
+
+ # Callback function to update it given two points of its diagonal.
+
+ # Create mouse position tracker that uses the function.
+ self.posn_tracker = MousePositionTracker(self.canvas)
+ self.posn_tracker.autodraw(command=on_drag) # Enable callbacks.
+
+ center_X = (float(selected_values[3]) * wi) / width
+ center_y = (float(selected_values[4]) * hi) / height
+ widthx = (float(selected_values[5]) * wi) / width
+ heightx = (float(selected_values[6]) * hi) / height
+
+ x = int(center_X - (widthx / 2))
+ y = int(center_y - (heightx / 2))
+
+ on_drag((int(x), int(y)), (x + int(widthx), int(y + heightx)))
+
+ self.txtfld1.set(selected_values[1])
+ self.txtfld2.set(selected_values[9])
+ self.txtfld3.set(selected_values[3])
+ self.txtfld4.set(selected_values[4])
+ self.txtfld5.set(selected_values[5])
+ self.txtfld6.set(selected_values[6])
+ self.txtfld7.set(selected_values[7])
+ self.txtfld8.set(selected_values[8])
+
+ if selected_values[11] == "Yes":
+ self.btn_submit.config(state=DISABLED)
+ else:
+ self.btn_submit.config(state=ACTIVE)
+
+ def validate():
+ try:
+ on_drag((int(0), int(0)), (665, 600))
+ time.sleep(1)
+ now = datetime.now()
+ filename = "Data/Saved_Images/" + str(now.strftime("%Y%m%d%H%M%S") + str(".jpg"))
+ ImageGrab.grab(bbox=(
+ self.canvas.winfo_rootx(),
+ self.canvas.winfo_rooty(),
+ self.canvas.winfo_rootx() + self.canvas.winfo_width(),
+ self.canvas.winfo_rooty() + self.canvas.winfo_height()
+ )).save(filename)
+
+ json_data = {
+ "userid": str(self.txtfld1.get()),
+ "image_url": filename,
+ "w_cord": float(self.txtfld3.get()),
+ "x_cord": float(self.txtfld4.get()),
+ "y_cord": float(self.txtfld5.get()),
+ "z_cord": float(self.txtfld6.get()),
+ "latitude": float(self.txtfld7.get()),
+ "longitude": float(self.txtfld8.get()),
+ "class_of_image": self.image_class[str(self.txtfld2.get())],
+ "auto": "No",
+ "uploaded": "No"
+ }
+
+ print(json_data)
+
+ with open('Data/Data/sample.json', 'r+') as openfile:
+ # Reading from json file
+ json_object = json.load(openfile)
+ json_object["data"].append(json_data)
+ openfile.seek(0)
+ json.dump(json_object, openfile, indent=4)
+
+ print(json_data)
+
+ messagebox.showinfo("Successfully", "The data saved into Json Data successfully")
+ load_tree()
+ except Exception:
+ print(Exception)
+ messagebox.showerror("Operation failed", "The data cannot be saved. Entered data invalid")
+
+ def load_tree():
+
+ self.temp_values = []
+
+ with open('Data/Data/sample.json', 'r') as openfile:
+ # Reading from json file
+ json_object = json.load(openfile)
+ for each in json_object["data"]:
+ self.temp_values.append([each["userid"], each["image_url"], each["w_cord"], each["x_cord"],
+ each["y_cord"], each["z_cord"], each["latitude"],
+ each["longitude"],
+ each["class_of_image"], each["auto"], each["uploaded"]])
+
+ self.frame = Frame(win)
+ self.frame.place(x=20, y=755)
+
+ self.tree = ttk.Treeview(self.frame, columns=(1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12), height=14,
+ show="headings")
+ self.tree.pack(side='left')
+ self.tree.bind('', selectItem)
+
+ self.val = ["serial No", "User Id", "Image Url", "W Coordinate", "X Coordinate", "Y Coordinate",
+ "Z Coordinate", "Latitude", "Longitude", "Class Of Image", "Auto", "Uploaded"]
+
+ for ii in range(1, len(self.val) + 1):
+ self.tree.heading(ii, text=self.val[ii - 1])
+
+ for ii in range(1, len(self.val) + 1):
+ self.tree.column(ii, width=156, anchor='center')
+
+ self.scroll1 = ttk.Scrollbar(self.frame, orient="vertical", command=self.tree.yview)
+ self.scroll1.pack(side='right', fill='y')
+
+ for i in range(len(self.temp_values) - 1, -1, -1):
+ if str(self.temp_values[i][10]) == "Yes":
+ self.tree.insert('', 'end', values=(str(i),
+ str(self.temp_values[i][0]),
+ str(self.temp_values[i][1]),
+ str(self.temp_values[i][2])
+ , str(self.temp_values[i][3]),
+ str(self.temp_values[i][4]),
+ str(self.temp_values[i][5]),
+ str(self.temp_values[i][6]),
+ str(self.temp_values[i][7]),
+ str(self.label_class[self.temp_values[i][8]]),
+ str(self.temp_values[i][9]),
+ str(self.temp_values[i][10])),
+ tags=('odd',))
+ else:
+ self.tree.insert('', 'end', values=(str(i),
+ str(self.temp_values[i][0]),
+ str(self.temp_values[i][1]),
+ str(self.temp_values[i][2])
+ , str(self.temp_values[i][3]),
+ str(self.temp_values[i][4]),
+ str(self.temp_values[i][5]),
+ str(self.temp_values[i][6]),
+ str(self.temp_values[i][7]),
+ str(self.label_class[self.temp_values[i][8]]),
+ str(self.temp_values[i][9]),
+ str(self.temp_values[i][10])),
+ tags=('even',))
+
+ self.tree.tag_configure('odd', background='#CCFF99')
+ self.tree.tag_configure('even', background='#FFFF99')
+
+ load = cv2.imread('Data/Images/Background/background_2.jpg', 1)
+ cv2imagex1 = cv2.cvtColor(load, cv2.COLOR_BGR2RGBA)
+ load = Image.fromarray(cv2imagex1)
+ load = load.resize((int(1920), int(1080)), Image.LANCZOS)
+ render = ImageTk.PhotoImage(load)
+ img = tk.Label(image=render)
+ img.image = render
+ img.place(x=0, y=0)
+
+ load = cv2.imread('Data/Images/Background/logo.png', 1)
+ cv2imagex1 = cv2.cvtColor(load, cv2.COLOR_BGR2RGBA)
+ load = Image.fromarray(cv2imagex1)
+ load = load.resize((int(250), int(160)), Image.LANCZOS)
+ render = ImageTk.PhotoImage(load)
+ img = tk.Label(image=render)
+ img.image = render
+ img.place(x=1515, y=0)
+
+ path = "Data/Images/Background/no_image.jpg"
+ imgx = ImageTk.PhotoImage(Image.open(path))
+
+ width = int(imgx.width() // 665)
+ height = int(imgx.height() // 600)
+
+ img = ImageTk.PhotoImage(Image.open(path).resize((665, 600), Image.LANCZOS))
+
+ self.canvas = tk.Canvas(win, width=img.width(), height=img.height(),
+ scrollregion=(0, 0, 500, 500))
+ self.canvas.place(x=1250, y=150)
+
+ self.canvas.create_image(0, 0, image=img, anchor=tk.NW)
+ self.canvas.img = img # Keep reference.
+
+ # LABEL AND TEXT BOX TO ENTER DETAILS OF ALL ELEMENTS OF A STATION
+ self.lb_title = Label(win, text="Image Data Captured",
+ font=("Ariel", 40, "bold"), bg='#F7F7F9')
+ self.lb_title.place(x=420, y=200)
+
+ self.lb1 = Label(win, text="User Id", font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb1.place(x=60, y=350)
+
+ self.txtfld1 = ttk.Combobox(win, font=("Helvetica", 20), )
+ self.txtfld1.place(x=300, y=350)
+ self.txtfld1.set(selected_values[1])
+ self.txtfld1.configure(state=DISABLED)
+
+ self.lb2 = Label(win, text="Image Class", fg='black', font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb2.place(x=650, y=350)
+
+ self.txtfld2 = ttk.Combobox(win, font=("Helvetica", 20),
+ values=['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus',
+ 'train', 'truck', 'boat', 'traffic light',
+ 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird',
+ 'cat', 'dog', 'horse', 'sheep', 'cow',
+ 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella',
+ 'handbag', 'tie', 'suitcase', 'frisbee',
+ 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat',
+ 'baseball glove', 'skateboard', 'surfboard',
+ 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife',
+ 'spoon', 'bowl', 'banana', 'apple',
+ 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza',
+ 'donut', 'cake', 'chair', 'couch',
+ 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop',
+ 'mouse', 'remote', 'keyboard', 'cell phone',
+ 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book',
+ 'clock', 'vase', 'scissors', 'teddy bear',
+ 'hair drier', 'toothbrush'])
+ self.txtfld2.place(x=890, y=350)
+ self.txtfld2.set(selected_values[9])
+
+ self.lb3 = Label(win, text="W Coordinate", fg='black', font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb3.place(x=60, y=425)
+
+ self.txtfld3 = ttk.Combobox(win, font=("Helvetica", 20))
+ self.txtfld3.place(x=300, y=425)
+ self.txtfld3.set(selected_values[3])
+ self.txtfld3.config(state=DISABLED)
+
+ self.lb4 = Label(win, text="X Coordinate", fg='black', font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb4.place(x=650, y=425)
+
+ self.txtfld4 = ttk.Combobox(win, font=("Helvetica", 20))
+ self.txtfld4.place(x=890, y=425)
+ self.txtfld4.set(selected_values[4])
+ self.txtfld4.config(state=DISABLED)
+
+ self.lb5 = Label(win, text="Y Coordinate", fg='black', font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb5.place(x=60, y=500)
+
+ self.txtfld5 = ttk.Combobox(win, font=("Helvetica", 20))
+ self.txtfld5.place(x=300, y=500)
+ self.txtfld5.set(selected_values[5])
+ self.txtfld5.config(state=DISABLED)
+
+ self.lb6 = Label(win, text="Z Coordinate", fg='black', font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb6.place(x=650, y=500)
+
+ self.txtfld6 = ttk.Combobox(win, font=("Helvetica", 20))
+ self.txtfld6.place(x=890, y=500)
+ self.txtfld6.set(selected_values[6])
+ self.txtfld6.config(state=DISABLED)
+
+ self.lb7 = Label(win, text="Latitude", fg='black', font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb7.place(x=60, y=575)
+
+ self.txtfld7 = ttk.Combobox(win, font=("Helvetica", 20))
+ self.txtfld7.place(x=300, y=575)
+ self.txtfld7.set(selected_values[7])
+ self.txtfld7.config(state=DISABLED)
+
+ self.lb8 = Label(win, text="Longitude", fg='black', font=("Helvetica", 20), bg='#F7F7F9')
+ self.lb8.place(x=650, y=575)
+
+ self.txtfld8 = ttk.Combobox(win, font=("Helvetica", 20))
+ self.txtfld8.place(x=890, y=575)
+ self.txtfld8.set(selected_values[8])
+ self.txtfld8.config(state=DISABLED)
+
+ load_tree()
+
+ self.btn_submit = ttk.Button(win, text="SUBMIT", command=validate)
+ self.btn_submit.place(x=540, y=660, width=250, height=60)
+
+ s = ttk.Style()
+ s.configure('my.TButton', font=('Aerial', 18, 'bold'))
+
+ self.btn_edit_images = ttk.Button(win, text="IMAGES", style='my.TButton', width=20,
+ command=open_image_file)
+ self.btn_edit_images.place(x=150, y=0, width=300, height=150)
+
+ self.btn_new_camera = ttk.Button(win, text="CAMERA", style='my.TButton', width=20, command=new_camera)
+ self.btn_new_camera.place(x=450, y=0, width=300, height=150)
+
+ self.b0 = tk.Button(win,
+ bg='#33ff00',
+ fg='#b7f731',
+ relief='flat',
+ width=20, command=self.back)
+ self.b0.place(x=0, y=0, width=150, height=150)
+
+ self.b0r = tk.Button(win,
+ bg='#f7421e',
+ fg='#b7f731',
+ relief='flat',
+ width=20, command=self.quit)
+ self.b0r.place(x=1770, y=0, width=150, height=150)
+
+ @staticmethod
+ def quit():
+ window_user_login3.destroy()
+ exit(0)
+
+ @staticmethod
+ def back():
+ window_user_login3.destroy()
+ display()
+
+ window_user_login3 = tk.Tk()
+ window_user_login3.config(background='#EFEFEF')
+ window_user_login3.attributes('-fullscreen', True)
+
+ View_Image(window_user_login3)
+ window_user_login3.iconbitmap(default='Data/Images/icons/favicon.ico')
+ window_user_login3.title('oneAPI_ODAV')
+ window_user_login3.mainloop()
+
+ display()
+
+
+if __name__ == '__main__':
+ main()
diff --git a/oneAPI_ODAV_APP/models/__init__.py b/oneAPI_ODAV_APP/models/__init__.py
new file mode 100644
index 000000000..a6131c10e
--- /dev/null
+++ b/oneAPI_ODAV_APP/models/__init__.py
@@ -0,0 +1 @@
+# init
diff --git a/oneAPI_ODAV_APP/models/common.py b/oneAPI_ODAV_APP/models/common.py
new file mode 100644
index 000000000..015cc788a
--- /dev/null
+++ b/oneAPI_ODAV_APP/models/common.py
@@ -0,0 +1,2020 @@
+import math
+from copy import copy
+from pathlib import Path
+
+
+import numpy as np
+import pandas as pd
+import requests
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+from torchvision.ops import DeformConv2d
+from PIL import Image
+from torch.cuda import amp
+
+from utils.datasets import letterbox
+from utils.general import non_max_suppression, make_divisible, scale_coords, increment_path, xyxy2xywh
+from utils.plots import color_list, plot_one_box
+from utils.torch_utils import time_synchronized
+
+
+##### basic ####
+
+def autopad(k, p=None): # kernel, padding
+ # Pad to 'same'
+ if p is None:
+ p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
+ return p
+
+
+class MP(nn.Module):
+ def __init__(self, k=2):
+ super(MP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class SP(nn.Module):
+ def __init__(self, k=3, s=1):
+ super(SP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=s, padding=k // 2)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class ReOrg(nn.Module):
+ def __init__(self):
+ super(ReOrg, self).__init__()
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1)
+
+
+class Concat(nn.Module):
+ def __init__(self, dimension=1):
+ super(Concat, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return torch.cat(x, self.d)
+
+
+class Chuncat(nn.Module):
+ def __init__(self, dimension=1):
+ super(Chuncat, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ x1 = []
+ x2 = []
+ for xi in x:
+ xi1, xi2 = xi.chunk(2, self.d)
+ x1.append(xi1)
+ x2.append(xi2)
+ return torch.cat(x1+x2, self.d)
+
+
+class Shortcut(nn.Module):
+ def __init__(self, dimension=0):
+ super(Shortcut, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return x[0]+x[1]
+
+
+class Foldcut(nn.Module):
+ def __init__(self, dimension=0):
+ super(Foldcut, self).__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ x1, x2 = x.chunk(2, self.d)
+ return x1+x2
+
+
+class Conv(nn.Module):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Conv, self).__init__()
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ def forward(self, x):
+ return self.act(self.bn(self.conv(x)))
+
+ def fuseforward(self, x):
+ return self.act(self.conv(x))
+
+
+class RobustConv(nn.Module):
+ # Robust convolution (use high kernel size 7-11 for: downsampling and other layers). Train for 300 - 450 epochs.
+ def __init__(self, c1, c2, k=7, s=1, p=None, g=1, act=True, layer_scale_init_value=1e-6): # ch_in, ch_out, kernel, stride, padding, groups
+ super(RobustConv, self).__init__()
+ self.conv_dw = Conv(c1, c1, k=k, s=s, p=p, g=c1, act=act)
+ self.conv1x1 = nn.Conv2d(c1, c2, 1, 1, 0, groups=1, bias=True)
+ self.gamma = nn.Parameter(layer_scale_init_value * torch.ones(c2)) if layer_scale_init_value > 0 else None
+
+ def forward(self, x):
+ x = x.to(memory_format=torch.channels_last)
+ x = self.conv1x1(self.conv_dw(x))
+ if self.gamma is not None:
+ x = x.mul(self.gamma.reshape(1, -1, 1, 1))
+ return x
+
+
+class RobustConv2(nn.Module):
+ # Robust convolution 2 (use [32, 5, 2] or [32, 7, 4] or [32, 11, 8] for one of the paths in CSP).
+ def __init__(self, c1, c2, k=7, s=4, p=None, g=1, act=True, layer_scale_init_value=1e-6): # ch_in, ch_out, kernel, stride, padding, groups
+ super(RobustConv2, self).__init__()
+ self.conv_strided = Conv(c1, c1, k=k, s=s, p=p, g=c1, act=act)
+ self.conv_deconv = nn.ConvTranspose2d(in_channels=c1, out_channels=c2, kernel_size=s, stride=s,
+ padding=0, bias=True, dilation=1, groups=1
+ )
+ self.gamma = nn.Parameter(layer_scale_init_value * torch.ones(c2)) if layer_scale_init_value > 0 else None
+
+ def forward(self, x):
+ x = self.conv_deconv(self.conv_strided(x))
+ if self.gamma is not None:
+ x = x.mul(self.gamma.reshape(1, -1, 1, 1))
+ return x
+
+
+def DWConv(c1, c2, k=1, s=1, act=True):
+ # Depthwise convolution
+ return Conv(c1, c2, k, s, g=math.gcd(c1, c2), act=act)
+
+
+class GhostConv(nn.Module):
+ # Ghost Convolution https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
+ super(GhostConv, self).__init__()
+ c_ = c2 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, k, s, None, g, act)
+ self.cv2 = Conv(c_, c_, 5, 1, None, c_, act)
+
+ def forward(self, x):
+ y = self.cv1(x)
+ return torch.cat([y, self.cv2(y)], 1)
+
+
+class Stem(nn.Module):
+ # Stem
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Stem, self).__init__()
+ c_ = int(c2/2) # hidden channels
+ self.cv1 = Conv(c1, c_, 3, 2)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 2)
+ self.pool = torch.nn.MaxPool2d(2, stride=2)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ return self.cv4(torch.cat((self.cv3(self.cv2(x)), self.pool(x)), dim=1))
+
+
+class DownC(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, n=1, k=2):
+ super(DownC, self).__init__()
+ c_ = int(c1) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2//2, 3, k)
+ self.cv3 = Conv(c1, c2//2, 1, 1)
+ self.mp = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return torch.cat((self.cv2(self.cv1(x)), self.cv3(self.mp(x))), dim=1)
+
+
+class SPP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, k=(5, 9, 13)):
+ super(SPP, self).__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+
+ def forward(self, x):
+ x = self.cv1(x)
+ return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))
+
+
+class Bottleneck(nn.Module):
+ # Darknet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super(Bottleneck, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2, 3, 1, g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class Res(nn.Module):
+ # ResNet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super(Res, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 3, 1, g=g)
+ self.cv3 = Conv(c_, c2, 1, 1)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv3(self.cv2(self.cv1(x))) if self.add else self.cv3(self.cv2(self.cv1(x)))
+
+
+class ResX(Res):
+ # ResNet bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=32, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+
+
+class Ghost(nn.Module):
+ # Ghost Bottleneck https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride
+ super(Ghost, self).__init__()
+ c_ = c2 // 2
+ self.conv = nn.Sequential(GhostConv(c1, c_, 1, 1), # pw
+ DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw
+ GhostConv(c_, c2, 1, 1, act=False)) # pw-linear
+ self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False),
+ Conv(c1, c2, 1, 1, act=False)) if s == 2 else nn.Identity()
+
+ def forward(self, x):
+ return self.conv(x) + self.shortcut(x)
+
+##### end of basic #####
+
+
+##### cspnet #####
+
+class SPPCSPC(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super(SPPCSPC, self).__init__()
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 1)
+ self.cv4 = Conv(c_, c_, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+ self.cv5 = Conv(4 * c_, c_, 1, 1)
+ self.cv6 = Conv(c_, c_, 3, 1)
+ self.cv7 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x1 = self.cv4(self.cv3(self.cv1(x)))
+ y1 = self.cv6(self.cv5(torch.cat([x1] + [m(x1) for m in self.m], 1)))
+ y2 = self.cv2(x)
+ return self.cv7(torch.cat((y1, y2), dim=1))
+
+class GhostSPPCSPC(SPPCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super().__init__(c1, c2, n, shortcut, g, e, k)
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = GhostConv(c1, c_, 1, 1)
+ self.cv2 = GhostConv(c1, c_, 1, 1)
+ self.cv3 = GhostConv(c_, c_, 3, 1)
+ self.cv4 = GhostConv(c_, c_, 1, 1)
+ self.cv5 = GhostConv(4 * c_, c_, 1, 1)
+ self.cv6 = GhostConv(c_, c_, 3, 1)
+ self.cv7 = GhostConv(2 * c_, c2, 1, 1)
+
+
+class GhostStem(Stem):
+ # Stem
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__(c1, c2, k, s, p, g, act)
+ c_ = int(c2/2) # hidden channels
+ self.cv1 = GhostConv(c1, c_, 3, 2)
+ self.cv2 = GhostConv(c_, c_, 1, 1)
+ self.cv3 = GhostConv(c_, c_, 3, 2)
+ self.cv4 = GhostConv(2 * c_, c2, 1, 1)
+
+
+class BottleneckCSPA(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class BottleneckCSPB(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class BottleneckCSPC(nn.Module):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(BottleneckCSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+
+class ResCSPA(BottleneckCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResCSPB(BottleneckCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResCSPC(BottleneckCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class ResXCSPA(ResCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class ResXCSPB(ResCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class ResXCSPC(ResCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class GhostCSPA(BottleneckCSPA):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+
+class GhostCSPB(BottleneckCSPB):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+
+class GhostCSPC(BottleneckCSPC):
+ # CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
+
+##### end of cspnet #####
+
+
+##### yolor #####
+
+class ImplicitA(nn.Module):
+ def __init__(self, channel, mean=0., std=.02):
+ super(ImplicitA, self).__init__()
+ self.channel = channel
+ self.mean = mean
+ self.std = std
+ self.implicit = nn.Parameter(torch.zeros(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=self.mean, std=self.std)
+
+ def forward(self, x):
+ return self.implicit + x
+
+
+class ImplicitM(nn.Module):
+ def __init__(self, channel, mean=1., std=.02):
+ super(ImplicitM, self).__init__()
+ self.channel = channel
+ self.mean = mean
+ self.std = std
+ self.implicit = nn.Parameter(torch.ones(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=self.mean, std=self.std)
+
+ def forward(self, x):
+ return self.implicit * x
+
+##### end of yolor #####
+
+
+##### repvgg #####
+
+class RepConv(nn.Module):
+ # Represented convolution
+ # https://arxiv.org/abs/2101.03697
+
+ def __init__(self, c1, c2, k=3, s=1, p=None, g=1, act=True, deploy=False):
+ super(RepConv, self).__init__()
+
+ self.deploy = deploy
+ self.groups = g
+ self.in_channels = c1
+ self.out_channels = c2
+
+ assert k == 3
+ assert autopad(k, p) == 1
+
+ padding_11 = autopad(k, p) - k // 2
+
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ if deploy:
+ self.rbr_reparam = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=True)
+
+ else:
+ self.rbr_identity = (nn.BatchNorm2d(num_features=c1) if c2 == c1 and s == 1 else None)
+
+ self.rbr_dense = nn.Sequential(
+ nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False),
+ nn.BatchNorm2d(num_features=c2),
+ )
+
+ self.rbr_1x1 = nn.Sequential(
+ nn.Conv2d( c1, c2, 1, s, padding_11, groups=g, bias=False),
+ nn.BatchNorm2d(num_features=c2),
+ )
+
+ def forward(self, inputs):
+ if hasattr(self, "rbr_reparam"):
+ return self.act(self.rbr_reparam(inputs))
+
+ if self.rbr_identity is None:
+ id_out = 0
+ else:
+ id_out = self.rbr_identity(inputs)
+
+ return self.act(self.rbr_dense(inputs) + self.rbr_1x1(inputs) + id_out)
+
+ def get_equivalent_kernel_bias(self):
+ kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense)
+ kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1)
+ kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity)
+ return (
+ kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1) + kernelid,
+ bias3x3 + bias1x1 + biasid,
+ )
+
+ def _pad_1x1_to_3x3_tensor(self, kernel1x1):
+ if kernel1x1 is None:
+ return 0
+ else:
+ return nn.functional.pad(kernel1x1, [1, 1, 1, 1])
+
+ def _fuse_bn_tensor(self, branch):
+ if branch is None:
+ return 0, 0
+ if isinstance(branch, nn.Sequential):
+ kernel = branch[0].weight
+ running_mean = branch[1].running_mean
+ running_var = branch[1].running_var
+ gamma = branch[1].weight
+ beta = branch[1].bias
+ eps = branch[1].eps
+ else:
+ assert isinstance(branch, nn.BatchNorm2d)
+ if not hasattr(self, "id_tensor"):
+ input_dim = self.in_channels // self.groups
+ kernel_value = np.zeros(
+ (self.in_channels, input_dim, 3, 3), dtype=np.float32
+ )
+ for i in range(self.in_channels):
+ kernel_value[i, i % input_dim, 1, 1] = 1
+ self.id_tensor = torch.from_numpy(kernel_value).to(branch.weight.device)
+ kernel = self.id_tensor
+ running_mean = branch.running_mean
+ running_var = branch.running_var
+ gamma = branch.weight
+ beta = branch.bias
+ eps = branch.eps
+ std = (running_var + eps).sqrt()
+ t = (gamma / std).reshape(-1, 1, 1, 1)
+ return kernel * t, beta - running_mean * gamma / std
+
+ def repvgg_convert(self):
+ kernel, bias = self.get_equivalent_kernel_bias()
+ return (
+ kernel.detach().cpu().numpy(),
+ bias.detach().cpu().numpy(),
+ )
+
+ def fuse_conv_bn(self, conv, bn):
+
+ std = (bn.running_var + bn.eps).sqrt()
+ bias = bn.bias - bn.running_mean * bn.weight / std
+
+ t = (bn.weight / std).reshape(-1, 1, 1, 1)
+ weights = conv.weight * t
+
+ bn = nn.Identity()
+ conv = nn.Conv2d(in_channels = conv.in_channels,
+ out_channels = conv.out_channels,
+ kernel_size = conv.kernel_size,
+ stride=conv.stride,
+ padding = conv.padding,
+ dilation = conv.dilation,
+ groups = conv.groups,
+ bias = True,
+ padding_mode = conv.padding_mode)
+
+ conv.weight = torch.nn.Parameter(weights)
+ conv.bias = torch.nn.Parameter(bias)
+ return conv
+
+ def fuse_repvgg_block(self):
+ if self.deploy:
+ return
+ print(f"RepConv.fuse_repvgg_block")
+
+ self.rbr_dense = self.fuse_conv_bn(self.rbr_dense[0], self.rbr_dense[1])
+
+ self.rbr_1x1 = self.fuse_conv_bn(self.rbr_1x1[0], self.rbr_1x1[1])
+ rbr_1x1_bias = self.rbr_1x1.bias
+ weight_1x1_expanded = torch.nn.functional.pad(self.rbr_1x1.weight, [1, 1, 1, 1])
+
+ # Fuse self.rbr_identity
+ if (isinstance(self.rbr_identity, nn.BatchNorm2d) or isinstance(self.rbr_identity, nn.modules.batchnorm.SyncBatchNorm)):
+ # print(f"fuse: rbr_identity == BatchNorm2d or SyncBatchNorm")
+ identity_conv_1x1 = nn.Conv2d(
+ in_channels=self.in_channels,
+ out_channels=self.out_channels,
+ kernel_size=1,
+ stride=1,
+ padding=0,
+ groups=self.groups,
+ bias=False)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.to(self.rbr_1x1.weight.data.device)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.squeeze().squeeze()
+ # print(f" identity_conv_1x1.weight = {identity_conv_1x1.weight.shape}")
+ identity_conv_1x1.weight.data.fill_(0.0)
+ identity_conv_1x1.weight.data.fill_diagonal_(1.0)
+ identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.unsqueeze(2).unsqueeze(3)
+ # print(f" identity_conv_1x1.weight = {identity_conv_1x1.weight.shape}")
+
+ identity_conv_1x1 = self.fuse_conv_bn(identity_conv_1x1, self.rbr_identity)
+ bias_identity_expanded = identity_conv_1x1.bias
+ weight_identity_expanded = torch.nn.functional.pad(identity_conv_1x1.weight, [1, 1, 1, 1])
+ else:
+ # print(f"fuse: rbr_identity != BatchNorm2d, rbr_identity = {self.rbr_identity}")
+ bias_identity_expanded = torch.nn.Parameter( torch.zeros_like(rbr_1x1_bias) )
+ weight_identity_expanded = torch.nn.Parameter( torch.zeros_like(weight_1x1_expanded) )
+
+
+ #print(f"self.rbr_1x1.weight = {self.rbr_1x1.weight.shape}, ")
+ #print(f"weight_1x1_expanded = {weight_1x1_expanded.shape}, ")
+ #print(f"self.rbr_dense.weight = {self.rbr_dense.weight.shape}, ")
+
+ self.rbr_dense.weight = torch.nn.Parameter(self.rbr_dense.weight + weight_1x1_expanded + weight_identity_expanded)
+ self.rbr_dense.bias = torch.nn.Parameter(self.rbr_dense.bias + rbr_1x1_bias + bias_identity_expanded)
+
+ self.rbr_reparam = self.rbr_dense
+ self.deploy = True
+
+ if self.rbr_identity is not None:
+ del self.rbr_identity
+ self.rbr_identity = None
+
+ if self.rbr_1x1 is not None:
+ del self.rbr_1x1
+ self.rbr_1x1 = None
+
+ if self.rbr_dense is not None:
+ del self.rbr_dense
+ self.rbr_dense = None
+
+
+class RepBottleneck(Bottleneck):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut=True, g=1, e=0.5)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c2, 3, 1, g=g)
+
+
+class RepBottleneckCSPA(BottleneckCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepBottleneckCSPB(BottleneckCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepBottleneckCSPC(BottleneckCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+
+class RepRes(Res):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c_, 3, 1, g=g)
+
+
+class RepResCSPA(ResCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResCSPB(ResCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResCSPC(ResCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResX(ResX):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=32, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__(c1, c2, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.cv2 = RepConv(c_, c_, 3, 1, g=g)
+
+
+class RepResXCSPA(ResXCSPA):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResXCSPB(ResXCSPB):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+
+class RepResXCSPC(ResXCSPC):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
+
+##### end of repvgg #####
+
+
+##### transformer #####
+
+class TransformerLayer(nn.Module):
+ # Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance)
+ def __init__(self, c, num_heads):
+ super().__init__()
+ self.q = nn.Linear(c, c, bias=False)
+ self.k = nn.Linear(c, c, bias=False)
+ self.v = nn.Linear(c, c, bias=False)
+ self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads)
+ self.fc1 = nn.Linear(c, c, bias=False)
+ self.fc2 = nn.Linear(c, c, bias=False)
+
+ def forward(self, x):
+ x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x
+ x = self.fc2(self.fc1(x)) + x
+ return x
+
+
+class TransformerBlock(nn.Module):
+ # Vision Transformer https://arxiv.org/abs/2010.11929
+ def __init__(self, c1, c2, num_heads, num_layers):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+ self.linear = nn.Linear(c2, c2) # learnable position embedding
+ self.tr = nn.Sequential(*[TransformerLayer(c2, num_heads) for _ in range(num_layers)])
+ self.c2 = c2
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ b, _, w, h = x.shape
+ p = x.flatten(2)
+ p = p.unsqueeze(0)
+ p = p.transpose(0, 3)
+ p = p.squeeze(3)
+ e = self.linear(p)
+ x = p + e
+
+ x = self.tr(x)
+ x = x.unsqueeze(3)
+ x = x.transpose(0, 3)
+ x = x.reshape(b, self.c2, w, h)
+ return x
+
+##### end of transformer #####
+
+
+##### yolov5 #####
+
+class Focus(nn.Module):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Focus, self).__init__()
+ self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
+ # self.contract = Contract(gain=2)
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
+ # return self.conv(self.contract(x))
+
+
+class SPPF(nn.Module):
+ # Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
+ def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * 4, c2, 1, 1)
+ self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(torch.cat([x, y1, y2, self.m(y2)], 1))
+
+
+class Contract(nn.Module):
+ # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ N, C, H, W = x.size() # assert (H / s == 0) and (W / s == 0), 'Indivisible gain'
+ s = self.gain
+ x = x.view(N, C, H // s, s, W // s, s) # x(1,64,40,2,40,2)
+ x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
+ return x.view(N, C * s * s, H // s, W // s) # x(1,256,40,40)
+
+
+class Expand(nn.Module):
+ # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ N, C, H, W = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
+ s = self.gain
+ x = x.view(N, s, s, C // s ** 2, H, W) # x(1,2,2,16,80,80)
+ x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
+ return x.view(N, C // s ** 2, H * s, W * s) # x(1,16,160,160)
+
+
+class NMS(nn.Module):
+ # Non-Maximum Suppression (NMS) module
+ conf = 0.25 # confidence threshold
+ iou = 0.45 # IoU threshold
+ classes = None # (optional list) filter by class
+
+ def __init__(self):
+ super(NMS, self).__init__()
+
+ def forward(self, x):
+ return non_max_suppression(x[0], conf_thres=self.conf, iou_thres=self.iou, classes=self.classes)
+
+
+class autoShape(nn.Module):
+ # input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS
+ conf = 0.25 # NMS confidence threshold
+ iou = 0.45 # NMS IoU threshold
+ classes = None # (optional list) filter by class
+
+ def __init__(self, model):
+ super(autoShape, self).__init__()
+ self.model = model.eval()
+
+ def autoshape(self):
+ print('autoShape already enabled, skipping... ') # model already converted to model.autoshape()
+ return self
+
+ @torch.no_grad()
+ def forward(self, imgs, size=640, augment=False, profile=False):
+ # Inference from various sources. For height=640, width=1280, RGB images example inputs are:
+ # filename: imgs = 'data/samples/zidane.jpg'
+ # URI: = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/zidane.jpg'
+ # OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3)
+ # PIL: = Image.open('image.jpg') # HWC x(640,1280,3)
+ # numpy: = np.zeros((640,1280,3)) # HWC
+ # torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values)
+ # multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images
+
+ t = [time_synchronized()]
+ p = next(self.model.parameters()) # for device and type
+ if isinstance(imgs, torch.Tensor): # torch
+ with amp.autocast(enabled=p.device.type != 'cpu'):
+ return self.model(imgs.to(p.device).type_as(p), augment, profile) # inference
+
+ # Pre-process
+ n, imgs = (len(imgs), imgs) if isinstance(imgs, list) else (1, [imgs]) # number of images, list of images
+ shape0, shape1, files = [], [], [] # image and inference shapes, filenames
+ for i, im in enumerate(imgs):
+ f = f'image{i}' # filename
+ if isinstance(im, str): # filename or uri
+ im, f = np.asarray(Image.open(requests.get(im, stream=True).raw if im.startswith('http') else im)), im
+ elif isinstance(im, Image.Image): # PIL Image
+ im, f = np.asarray(im), getattr(im, 'filename', f) or f
+ files.append(Path(f).with_suffix('.jpg').name)
+ if im.shape[0] < 5: # image in CHW
+ im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1)
+ im = im[:, :, :3] if im.ndim == 3 else np.tile(im[:, :, None], 3) # enforce 3ch input
+ s = im.shape[:2] # HWC
+ shape0.append(s) # image shape
+ g = (size / max(s)) # gain
+ shape1.append([y * g for y in s])
+ imgs[i] = im # update
+ shape1 = [make_divisible(x, int(self.stride.max())) for x in np.stack(shape1, 0).max(0)] # inference shape
+ x = [letterbox(im, new_shape=shape1, auto=False)[0] for im in imgs] # pad
+ x = np.stack(x, 0) if n > 1 else x[0][None] # stack
+ x = np.ascontiguousarray(x.transpose((0, 3, 1, 2))) # BHWC to BCHW
+ x = torch.from_numpy(x).to(p.device).type_as(p) / 255. # uint8 to fp16/32
+ t.append(time_synchronized())
+
+ with amp.autocast(enabled=p.device.type != 'cpu'):
+ # Inference
+ y = self.model(x, augment, profile)[0] # forward
+ t.append(time_synchronized())
+
+ # Post-process
+ y = non_max_suppression(y, conf_thres=self.conf, iou_thres=self.iou, classes=self.classes) # NMS
+ for i in range(n):
+ scale_coords(shape1, y[i][:, :4], shape0[i])
+
+ t.append(time_synchronized())
+ return Detections(imgs, y, files, t, self.names, x.shape)
+
+
+class Detections:
+ # detections class for YOLOv5 inference results
+ def __init__(self, imgs, pred, files, times=None, names=None, shape=None):
+ super(Detections, self).__init__()
+ d = pred[0].device # device
+ gn = [torch.tensor([*[im.shape[i] for i in [1, 0, 1, 0]], 1., 1.], device=d) for im in imgs] # normalizations
+ self.imgs = imgs # list of images as numpy arrays
+ self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls)
+ self.names = names # class names
+ self.files = files # image filenames
+ self.xyxy = pred # xyxy pixels
+ self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels
+ self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized
+ self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized
+ self.n = len(self.pred) # number of images (batch size)
+ self.t = tuple((times[i + 1] - times[i]) * 1000 / self.n for i in range(3)) # timestamps (ms)
+ self.s = shape # inference BCHW shape
+
+ def display(self, pprint=False, show=False, save=False, render=False, save_dir=''):
+ colors = color_list()
+ for i, (img, pred) in enumerate(zip(self.imgs, self.pred)):
+ str = f'image {i + 1}/{len(self.pred)}: {img.shape[0]}x{img.shape[1]} '
+ if pred is not None:
+ for c in pred[:, -1].unique():
+ n = (pred[:, -1] == c).sum() # detections per class
+ str += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string
+ if show or save or render:
+ for *box, conf, cls in pred: # xyxy, confidence, class
+ label = f'{self.names[int(cls)]} {conf:.2f}'
+ plot_one_box(box, img, label=label, color=colors[int(cls) % 10])
+ img = Image.fromarray(img.astype(np.uint8)) if isinstance(img, np.ndarray) else img # from np
+ if pprint:
+ print(str.rstrip(', '))
+ if show:
+ img.show(self.files[i]) # show
+ if save:
+ f = self.files[i]
+ img.save(Path(save_dir) / f) # save
+ print(f"{'Saved' * (i == 0)} {f}", end=',' if i < self.n - 1 else f' to {save_dir}\n')
+ if render:
+ self.imgs[i] = np.asarray(img)
+
+ def print(self):
+ self.display(pprint=True) # print results
+ print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {tuple(self.s)}' % self.t)
+
+ def show(self):
+ self.display(show=True) # show results
+
+ def save(self, save_dir='runs/hub/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/hub/exp') # increment save_dir
+ Path(save_dir).mkdir(parents=True, exist_ok=True)
+ self.display(save=True, save_dir=save_dir) # save results
+
+ def render(self):
+ self.display(render=True) # render results
+ return self.imgs
+
+ def pandas(self):
+ # return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0])
+ new = copy(self) # return copy
+ ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns
+ cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns
+ for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]):
+ a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update
+ setattr(new, k, [pd.DataFrame(x, columns=c) for x in a])
+ return new
+
+ def tolist(self):
+ # return a list of Detections objects, i.e. 'for result in results.tolist():'
+ x = [Detections([self.imgs[i]], [self.pred[i]], self.names, self.s) for i in range(self.n)]
+ for d in x:
+ for k in ['imgs', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']:
+ setattr(d, k, getattr(d, k)[0]) # pop out of list
+ return x
+
+ def __len__(self):
+ return self.n
+
+
+class Classify(nn.Module):
+ # Classification head, i.e. x(b,c1,20,20) to x(b,c2)
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups
+ super(Classify, self).__init__()
+ self.aap = nn.AdaptiveAvgPool2d(1) # to x(b,c1,1,1)
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g) # to x(b,c2,1,1)
+ self.flat = nn.Flatten()
+
+ def forward(self, x):
+ z = torch.cat([self.aap(y) for y in (x if isinstance(x, list) else [x])], 1) # cat if list
+ return self.flat(self.conv(z)) # flatten to x(b,c2)
+
+##### end of yolov5 ######
+
+
+##### orepa #####
+
+def transI_fusebn(kernel, bn):
+ gamma = bn.weight
+ std = (bn.running_var + bn.eps).sqrt()
+ return kernel * ((gamma / std).reshape(-1, 1, 1, 1)), bn.bias - bn.running_mean * gamma / std
+
+
+class ConvBN(nn.Module):
+ def __init__(self, in_channels, out_channels, kernel_size,
+ stride=1, padding=0, dilation=1, groups=1, deploy=False, nonlinear=None):
+ super().__init__()
+ if nonlinear is None:
+ self.nonlinear = nn.Identity()
+ else:
+ self.nonlinear = nonlinear
+ if deploy:
+ self.conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
+ stride=stride, padding=padding, dilation=dilation, groups=groups, bias=True)
+ else:
+ self.conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
+ stride=stride, padding=padding, dilation=dilation, groups=groups, bias=False)
+ self.bn = nn.BatchNorm2d(num_features=out_channels)
+
+ def forward(self, x):
+ if hasattr(self, 'bn'):
+ return self.nonlinear(self.bn(self.conv(x)))
+ else:
+ return self.nonlinear(self.conv(x))
+
+ def switch_to_deploy(self):
+ kernel, bias = transI_fusebn(self.conv.weight, self.bn)
+ conv = nn.Conv2d(in_channels=self.conv.in_channels, out_channels=self.conv.out_channels, kernel_size=self.conv.kernel_size,
+ stride=self.conv.stride, padding=self.conv.padding, dilation=self.conv.dilation, groups=self.conv.groups, bias=True)
+ conv.weight.data = kernel
+ conv.bias.data = bias
+ for para in self.parameters():
+ para.detach_()
+ self.__delattr__('conv')
+ self.__delattr__('bn')
+ self.conv = conv
+
+class OREPA_3x3_RepConv(nn.Module):
+
+ def __init__(self, in_channels, out_channels, kernel_size,
+ stride=1, padding=0, dilation=1, groups=1,
+ internal_channels_1x1_3x3=None,
+ deploy=False, nonlinear=None, single_init=False):
+ super(OREPA_3x3_RepConv, self).__init__()
+ self.deploy = deploy
+
+ if nonlinear is None:
+ self.nonlinear = nn.Identity()
+ else:
+ self.nonlinear = nonlinear
+
+ self.kernel_size = kernel_size
+ self.in_channels = in_channels
+ self.out_channels = out_channels
+ self.groups = groups
+ assert padding == kernel_size // 2
+
+ self.stride = stride
+ self.padding = padding
+ self.dilation = dilation
+
+ self.branch_counter = 0
+
+ self.weight_rbr_origin = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), kernel_size, kernel_size))
+ nn.init.kaiming_uniform_(self.weight_rbr_origin, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+
+ if groups < out_channels:
+ self.weight_rbr_avg_conv = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), 1, 1))
+ self.weight_rbr_pfir_conv = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_avg_conv, a=1.0)
+ nn.init.kaiming_uniform_(self.weight_rbr_pfir_conv, a=1.0)
+ self.weight_rbr_avg_conv.data
+ self.weight_rbr_pfir_conv.data
+ self.register_buffer('weight_rbr_avg_avg', torch.ones(kernel_size, kernel_size).mul(1.0/kernel_size/kernel_size))
+ self.branch_counter += 1
+
+ else:
+ raise NotImplementedError
+ self.branch_counter += 1
+
+ if internal_channels_1x1_3x3 is None:
+ internal_channels_1x1_3x3 = in_channels if groups < out_channels else 2 * in_channels # For mobilenet, it is better to have 2X internal channels
+
+ if internal_channels_1x1_3x3 == in_channels:
+ self.weight_rbr_1x1_kxk_idconv1 = nn.Parameter(torch.zeros(in_channels, int(in_channels/self.groups), 1, 1))
+ id_value = np.zeros((in_channels, int(in_channels/self.groups), 1, 1))
+ for i in range(in_channels):
+ id_value[i, i % int(in_channels/self.groups), 0, 0] = 1
+ id_tensor = torch.from_numpy(id_value).type_as(self.weight_rbr_1x1_kxk_idconv1)
+ self.register_buffer('id_tensor', id_tensor)
+
+ else:
+ self.weight_rbr_1x1_kxk_conv1 = nn.Parameter(torch.Tensor(internal_channels_1x1_3x3, int(in_channels/self.groups), 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_1x1_kxk_conv1, a=math.sqrt(1.0))
+ self.weight_rbr_1x1_kxk_conv2 = nn.Parameter(torch.Tensor(out_channels, int(internal_channels_1x1_3x3/self.groups), kernel_size, kernel_size))
+ nn.init.kaiming_uniform_(self.weight_rbr_1x1_kxk_conv2, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+ expand_ratio = 8
+ self.weight_rbr_gconv_dw = nn.Parameter(torch.Tensor(in_channels*expand_ratio, 1, kernel_size, kernel_size))
+ self.weight_rbr_gconv_pw = nn.Parameter(torch.Tensor(out_channels, in_channels*expand_ratio, 1, 1))
+ nn.init.kaiming_uniform_(self.weight_rbr_gconv_dw, a=math.sqrt(1.0))
+ nn.init.kaiming_uniform_(self.weight_rbr_gconv_pw, a=math.sqrt(1.0))
+ self.branch_counter += 1
+
+ if out_channels == in_channels and stride == 1:
+ self.branch_counter += 1
+
+ self.vector = nn.Parameter(torch.Tensor(self.branch_counter, self.out_channels))
+ self.bn = nn.BatchNorm2d(out_channels)
+
+ self.fre_init()
+
+ nn.init.constant_(self.vector[0, :], 0.25) #origin
+ nn.init.constant_(self.vector[1, :], 0.25) #avg
+ nn.init.constant_(self.vector[2, :], 0.0) #prior
+ nn.init.constant_(self.vector[3, :], 0.5) #1x1_kxk
+ nn.init.constant_(self.vector[4, :], 0.5) #dws_conv
+
+
+ def fre_init(self):
+ prior_tensor = torch.Tensor(self.out_channels, self.kernel_size, self.kernel_size)
+ half_fg = self.out_channels/2
+ for i in range(self.out_channels):
+ for h in range(3):
+ for w in range(3):
+ if i < half_fg:
+ prior_tensor[i, h, w] = math.cos(math.pi*(h+0.5)*(i+1)/3)
+ else:
+ prior_tensor[i, h, w] = math.cos(math.pi*(w+0.5)*(i+1-half_fg)/3)
+
+ self.register_buffer('weight_rbr_prior', prior_tensor)
+
+ def weight_gen(self):
+
+ weight_rbr_origin = torch.einsum('oihw,o->oihw', self.weight_rbr_origin, self.vector[0, :])
+
+ weight_rbr_avg = torch.einsum('oihw,o->oihw', torch.einsum('oihw,hw->oihw', self.weight_rbr_avg_conv, self.weight_rbr_avg_avg), self.vector[1, :])
+
+ weight_rbr_pfir = torch.einsum('oihw,o->oihw', torch.einsum('oihw,ohw->oihw', self.weight_rbr_pfir_conv, self.weight_rbr_prior), self.vector[2, :])
+
+ weight_rbr_1x1_kxk_conv1 = None
+ if hasattr(self, 'weight_rbr_1x1_kxk_idconv1'):
+ weight_rbr_1x1_kxk_conv1 = (self.weight_rbr_1x1_kxk_idconv1 + self.id_tensor).squeeze()
+ elif hasattr(self, 'weight_rbr_1x1_kxk_conv1'):
+ weight_rbr_1x1_kxk_conv1 = self.weight_rbr_1x1_kxk_conv1.squeeze()
+ else:
+ raise NotImplementedError
+ weight_rbr_1x1_kxk_conv2 = self.weight_rbr_1x1_kxk_conv2
+
+ if self.groups > 1:
+ g = self.groups
+ t, ig = weight_rbr_1x1_kxk_conv1.size()
+ o, tg, h, w = weight_rbr_1x1_kxk_conv2.size()
+ weight_rbr_1x1_kxk_conv1 = weight_rbr_1x1_kxk_conv1.view(g, int(t/g), ig)
+ weight_rbr_1x1_kxk_conv2 = weight_rbr_1x1_kxk_conv2.view(g, int(o/g), tg, h, w)
+ weight_rbr_1x1_kxk = torch.einsum('gti,gothw->goihw', weight_rbr_1x1_kxk_conv1, weight_rbr_1x1_kxk_conv2).view(o, ig, h, w)
+ else:
+ weight_rbr_1x1_kxk = torch.einsum('ti,othw->oihw', weight_rbr_1x1_kxk_conv1, weight_rbr_1x1_kxk_conv2)
+
+ weight_rbr_1x1_kxk = torch.einsum('oihw,o->oihw', weight_rbr_1x1_kxk, self.vector[3, :])
+
+ weight_rbr_gconv = self.dwsc2full(self.weight_rbr_gconv_dw, self.weight_rbr_gconv_pw, self.in_channels)
+ weight_rbr_gconv = torch.einsum('oihw,o->oihw', weight_rbr_gconv, self.vector[4, :])
+
+ weight = weight_rbr_origin + weight_rbr_avg + weight_rbr_1x1_kxk + weight_rbr_pfir + weight_rbr_gconv
+
+ return weight
+
+ def dwsc2full(self, weight_dw, weight_pw, groups):
+
+ t, ig, h, w = weight_dw.size()
+ o, _, _, _ = weight_pw.size()
+ tg = int(t/groups)
+ i = int(ig*groups)
+ weight_dw = weight_dw.view(groups, tg, ig, h, w)
+ weight_pw = weight_pw.squeeze().view(o, groups, tg)
+
+ weight_dsc = torch.einsum('gtihw,ogt->ogihw', weight_dw, weight_pw)
+ return weight_dsc.view(o, i, h, w)
+
+ def forward(self, inputs):
+ weight = self.weight_gen()
+ out = F.conv2d(inputs, weight, bias=None, stride=self.stride, padding=self.padding, dilation=self.dilation, groups=self.groups)
+
+ return self.nonlinear(self.bn(out))
+
+class RepConv_OREPA(nn.Module):
+
+ def __init__(self, c1, c2, k=3, s=1, padding=1, dilation=1, groups=1, padding_mode='zeros', deploy=False, use_se=False, nonlinear=nn.SiLU()):
+ super(RepConv_OREPA, self).__init__()
+ self.deploy = deploy
+ self.groups = groups
+ self.in_channels = c1
+ self.out_channels = c2
+
+ self.padding = padding
+ self.dilation = dilation
+ self.groups = groups
+
+ assert k == 3
+ assert padding == 1
+
+ padding_11 = padding - k // 2
+
+ if nonlinear is None:
+ self.nonlinearity = nn.Identity()
+ else:
+ self.nonlinearity = nonlinear
+
+ if use_se:
+ self.se = SEBlock(self.out_channels, internal_neurons=self.out_channels // 16)
+ else:
+ self.se = nn.Identity()
+
+ if deploy:
+ self.rbr_reparam = nn.Conv2d(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=k, stride=s,
+ padding=padding, dilation=dilation, groups=groups, bias=True, padding_mode=padding_mode)
+
+ else:
+ self.rbr_identity = nn.BatchNorm2d(num_features=self.in_channels) if self.out_channels == self.in_channels and s == 1 else None
+ self.rbr_dense = OREPA_3x3_RepConv(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=k, stride=s, padding=padding, groups=groups, dilation=1)
+ self.rbr_1x1 = ConvBN(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=1, stride=s, padding=padding_11, groups=groups, dilation=1)
+ print('RepVGG Block, identity = ', self.rbr_identity)
+
+
+ def forward(self, inputs):
+ if hasattr(self, 'rbr_reparam'):
+ return self.nonlinearity(self.se(self.rbr_reparam(inputs)))
+
+ if self.rbr_identity is None:
+ id_out = 0
+ else:
+ id_out = self.rbr_identity(inputs)
+
+ out1 = self.rbr_dense(inputs)
+ out2 = self.rbr_1x1(inputs)
+ out3 = id_out
+ out = out1 + out2 + out3
+
+ return self.nonlinearity(self.se(out))
+
+
+ # Optional. This improves the accuracy and facilitates quantization.
+ # 1. Cancel the original weight decay on rbr_dense.conv.weight and rbr_1x1.conv.weight.
+ # 2. Use like this.
+ # loss = criterion(....)
+ # for every RepVGGBlock blk:
+ # loss += weight_decay_coefficient * 0.5 * blk.get_cust_L2()
+ # optimizer.zero_grad()
+ # loss.backward()
+
+ # Not used for OREPA
+ def get_custom_L2(self):
+ K3 = self.rbr_dense.weight_gen()
+ K1 = self.rbr_1x1.conv.weight
+ t3 = (self.rbr_dense.bn.weight / ((self.rbr_dense.bn.running_var + self.rbr_dense.bn.eps).sqrt())).reshape(-1, 1, 1, 1).detach()
+ t1 = (self.rbr_1x1.bn.weight / ((self.rbr_1x1.bn.running_var + self.rbr_1x1.bn.eps).sqrt())).reshape(-1, 1, 1, 1).detach()
+
+ l2_loss_circle = (K3 ** 2).sum() - (K3[:, :, 1:2, 1:2] ** 2).sum() # The L2 loss of the "circle" of weights in 3x3 kernel. Use regular L2 on them.
+ eq_kernel = K3[:, :, 1:2, 1:2] * t3 + K1 * t1 # The equivalent resultant central point of 3x3 kernel.
+ l2_loss_eq_kernel = (eq_kernel ** 2 / (t3 ** 2 + t1 ** 2)).sum() # Normalize for an L2 coefficient comparable to regular L2.
+ return l2_loss_eq_kernel + l2_loss_circle
+
+ def get_equivalent_kernel_bias(self):
+ kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense)
+ kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1)
+ kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity)
+ return kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1) + kernelid, bias3x3 + bias1x1 + biasid
+
+ def _pad_1x1_to_3x3_tensor(self, kernel1x1):
+ if kernel1x1 is None:
+ return 0
+ else:
+ return torch.nn.functional.pad(kernel1x1, [1,1,1,1])
+
+ def _fuse_bn_tensor(self, branch):
+ if branch is None:
+ return 0, 0
+ if not isinstance(branch, nn.BatchNorm2d):
+ if isinstance(branch, OREPA_3x3_RepConv):
+ kernel = branch.weight_gen()
+ elif isinstance(branch, ConvBN):
+ kernel = branch.conv.weight
+ else:
+ raise NotImplementedError
+ running_mean = branch.bn.running_mean
+ running_var = branch.bn.running_var
+ gamma = branch.bn.weight
+ beta = branch.bn.bias
+ eps = branch.bn.eps
+ else:
+ if not hasattr(self, 'id_tensor'):
+ input_dim = self.in_channels // self.groups
+ kernel_value = np.zeros((self.in_channels, input_dim, 3, 3), dtype=np.float32)
+ for i in range(self.in_channels):
+ kernel_value[i, i % input_dim, 1, 1] = 1
+ self.id_tensor = torch.from_numpy(kernel_value).to(branch.weight.device)
+ kernel = self.id_tensor
+ running_mean = branch.running_mean
+ running_var = branch.running_var
+ gamma = branch.weight
+ beta = branch.bias
+ eps = branch.eps
+ std = (running_var + eps).sqrt()
+ t = (gamma / std).reshape(-1, 1, 1, 1)
+ return kernel * t, beta - running_mean * gamma / std
+
+ def switch_to_deploy(self):
+ if hasattr(self, 'rbr_reparam'):
+ return
+ print(f"RepConv_OREPA.switch_to_deploy")
+ kernel, bias = self.get_equivalent_kernel_bias()
+ self.rbr_reparam = nn.Conv2d(in_channels=self.rbr_dense.in_channels, out_channels=self.rbr_dense.out_channels,
+ kernel_size=self.rbr_dense.kernel_size, stride=self.rbr_dense.stride,
+ padding=self.rbr_dense.padding, dilation=self.rbr_dense.dilation, groups=self.rbr_dense.groups, bias=True)
+ self.rbr_reparam.weight.data = kernel
+ self.rbr_reparam.bias.data = bias
+ for para in self.parameters():
+ para.detach_()
+ self.__delattr__('rbr_dense')
+ self.__delattr__('rbr_1x1')
+ if hasattr(self, 'rbr_identity'):
+ self.__delattr__('rbr_identity')
+
+##### end of orepa #####
+
+
+##### swin transformer #####
+
+class WindowAttention(nn.Module):
+
+ def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):
+
+ super().__init__()
+ self.dim = dim
+ self.window_size = window_size # Wh, Ww
+ self.num_heads = num_heads
+ head_dim = dim // num_heads
+ self.scale = qk_scale or head_dim ** -0.5
+
+ # define a parameter table of relative position bias
+ self.relative_position_bias_table = nn.Parameter(
+ torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nH
+
+ # get pair-wise relative position index for each token inside the window
+ coords_h = torch.arange(self.window_size[0])
+ coords_w = torch.arange(self.window_size[1])
+ coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
+ coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
+ relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
+ relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
+ relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
+ relative_coords[:, :, 1] += self.window_size[1] - 1
+ relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
+ relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
+ self.register_buffer("relative_position_index", relative_position_index)
+
+ self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
+ self.attn_drop = nn.Dropout(attn_drop)
+ self.proj = nn.Linear(dim, dim)
+ self.proj_drop = nn.Dropout(proj_drop)
+
+ nn.init.normal_(self.relative_position_bias_table, std=.02)
+ self.softmax = nn.Softmax(dim=-1)
+
+ def forward(self, x, mask=None):
+
+ B_, N, C = x.shape
+ qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
+ q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
+
+ q = q * self.scale
+ attn = (q @ k.transpose(-2, -1))
+
+ relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(
+ self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
+ relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
+ attn = attn + relative_position_bias.unsqueeze(0)
+
+ if mask is not None:
+ nW = mask.shape[0]
+ attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
+ attn = attn.view(-1, self.num_heads, N, N)
+ attn = self.softmax(attn)
+ else:
+ attn = self.softmax(attn)
+
+ attn = self.attn_drop(attn)
+
+ # print(attn.dtype, v.dtype)
+ try:
+ x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
+ except:
+ #print(attn.dtype, v.dtype)
+ x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)
+ x = self.proj(x)
+ x = self.proj_drop(x)
+ return x
+
+class Mlp(nn.Module):
+
+ def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):
+ super().__init__()
+ out_features = out_features or in_features
+ hidden_features = hidden_features or in_features
+ self.fc1 = nn.Linear(in_features, hidden_features)
+ self.act = act_layer()
+ self.fc2 = nn.Linear(hidden_features, out_features)
+ self.drop = nn.Dropout(drop)
+
+ def forward(self, x):
+ x = self.fc1(x)
+ x = self.act(x)
+ x = self.drop(x)
+ x = self.fc2(x)
+ x = self.drop(x)
+ return x
+
+def window_partition(x, window_size):
+
+ B, H, W, C = x.shape
+ assert H % window_size == 0, 'feature map h and w can not divide by window size'
+ x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
+ windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
+ return windows
+
+def window_reverse(windows, window_size, H, W):
+
+ B = int(windows.shape[0] / (H * W / window_size / window_size))
+ x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
+ x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
+ return x
+
+
+class SwinTransformerLayer(nn.Module):
+
+ def __init__(self, dim, num_heads, window_size=8, shift_size=0,
+ mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0.,
+ act_layer=nn.SiLU, norm_layer=nn.LayerNorm):
+ super().__init__()
+ self.dim = dim
+ self.num_heads = num_heads
+ self.window_size = window_size
+ self.shift_size = shift_size
+ self.mlp_ratio = mlp_ratio
+ # if min(self.input_resolution) <= self.window_size:
+ # # if window size is larger than input resolution, we don't partition windows
+ # self.shift_size = 0
+ # self.window_size = min(self.input_resolution)
+ assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
+
+ self.norm1 = norm_layer(dim)
+ self.attn = WindowAttention(
+ dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,
+ qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)
+
+ self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
+ self.norm2 = norm_layer(dim)
+ mlp_hidden_dim = int(dim * mlp_ratio)
+ self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
+
+ def create_mask(self, H, W):
+ # calculate attention mask for SW-MSA
+ img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
+ h_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ w_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ cnt = 0
+ for h in h_slices:
+ for w in w_slices:
+ img_mask[:, h, w, :] = cnt
+ cnt += 1
+
+ mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
+ mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
+ attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
+ attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
+
+ return attn_mask
+
+ def forward(self, x):
+ # reshape x[b c h w] to x[b l c]
+ _, _, H_, W_ = x.shape
+
+ Padding = False
+ if min(H_, W_) < self.window_size or H_ % self.window_size!=0 or W_ % self.window_size!=0:
+ Padding = True
+ # print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')
+ pad_r = (self.window_size - W_ % self.window_size) % self.window_size
+ pad_b = (self.window_size - H_ % self.window_size) % self.window_size
+ x = F.pad(x, (0, pad_r, 0, pad_b))
+
+ # print('2', x.shape)
+ B, C, H, W = x.shape
+ L = H * W
+ x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c
+
+ # create mask from init to forward
+ if self.shift_size > 0:
+ attn_mask = self.create_mask(H, W).to(x.device)
+ else:
+ attn_mask = None
+
+ shortcut = x
+ x = self.norm1(x)
+ x = x.view(B, H, W, C)
+
+ # cyclic shift
+ if self.shift_size > 0:
+ shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
+ else:
+ shifted_x = x
+
+ # partition windows
+ x_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, C
+ x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
+
+ # W-MSA/SW-MSA
+ attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C
+
+ # merge windows
+ attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
+ shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' C
+
+ # reverse cyclic shift
+ if self.shift_size > 0:
+ x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
+ else:
+ x = shifted_x
+ x = x.view(B, H * W, C)
+
+ # FFN
+ x = shortcut + self.drop_path(x)
+ x = x + self.drop_path(self.mlp(self.norm2(x)))
+
+ x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w
+
+ if Padding:
+ x = x[:, :, :H_, :W_] # reverse padding
+
+ return x
+
+
+class SwinTransformerBlock(nn.Module):
+ def __init__(self, c1, c2, num_heads, num_layers, window_size=8):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+
+ # remove input_resolution
+ self.blocks = nn.Sequential(*[SwinTransformerLayer(dim=c2, num_heads=num_heads, window_size=window_size,
+ shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)])
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ x = self.blocks(x)
+ return x
+
+
+class STCSPA(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class STCSPB(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class STCSPC(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(STCSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformerBlock(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+##### end of swin transformer #####
+
+
+##### swin transformer v2 #####
+
+class WindowAttention_v2(nn.Module):
+
+ def __init__(self, dim, window_size, num_heads, qkv_bias=True, attn_drop=0., proj_drop=0.,
+ pretrained_window_size=[0, 0]):
+
+ super().__init__()
+ self.dim = dim
+ self.window_size = window_size # Wh, Ww
+ self.pretrained_window_size = pretrained_window_size
+ self.num_heads = num_heads
+
+ self.logit_scale = nn.Parameter(torch.log(10 * torch.ones((num_heads, 1, 1))), requires_grad=True)
+
+ # mlp to generate continuous relative position bias
+ self.cpb_mlp = nn.Sequential(nn.Linear(2, 512, bias=True),
+ nn.ReLU(inplace=True),
+ nn.Linear(512, num_heads, bias=False))
+
+ # get relative_coords_table
+ relative_coords_h = torch.arange(-(self.window_size[0] - 1), self.window_size[0], dtype=torch.float32)
+ relative_coords_w = torch.arange(-(self.window_size[1] - 1), self.window_size[1], dtype=torch.float32)
+ relative_coords_table = torch.stack(
+ torch.meshgrid([relative_coords_h,
+ relative_coords_w])).permute(1, 2, 0).contiguous().unsqueeze(0) # 1, 2*Wh-1, 2*Ww-1, 2
+ if pretrained_window_size[0] > 0:
+ relative_coords_table[:, :, :, 0] /= (pretrained_window_size[0] - 1)
+ relative_coords_table[:, :, :, 1] /= (pretrained_window_size[1] - 1)
+ else:
+ relative_coords_table[:, :, :, 0] /= (self.window_size[0] - 1)
+ relative_coords_table[:, :, :, 1] /= (self.window_size[1] - 1)
+ relative_coords_table *= 8 # normalize to -8, 8
+ relative_coords_table = torch.sign(relative_coords_table) * torch.log2(
+ torch.abs(relative_coords_table) + 1.0) / np.log2(8)
+
+ self.register_buffer("relative_coords_table", relative_coords_table)
+
+ # get pair-wise relative position index for each token inside the window
+ coords_h = torch.arange(self.window_size[0])
+ coords_w = torch.arange(self.window_size[1])
+ coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
+ coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
+ relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
+ relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
+ relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
+ relative_coords[:, :, 1] += self.window_size[1] - 1
+ relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
+ relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
+ self.register_buffer("relative_position_index", relative_position_index)
+
+ self.qkv = nn.Linear(dim, dim * 3, bias=False)
+ if qkv_bias:
+ self.q_bias = nn.Parameter(torch.zeros(dim))
+ self.v_bias = nn.Parameter(torch.zeros(dim))
+ else:
+ self.q_bias = None
+ self.v_bias = None
+ self.attn_drop = nn.Dropout(attn_drop)
+ self.proj = nn.Linear(dim, dim)
+ self.proj_drop = nn.Dropout(proj_drop)
+ self.softmax = nn.Softmax(dim=-1)
+
+ def forward(self, x, mask=None):
+
+ B_, N, C = x.shape
+ qkv_bias = None
+ if self.q_bias is not None:
+ qkv_bias = torch.cat((self.q_bias, torch.zeros_like(self.v_bias, requires_grad=False), self.v_bias))
+ qkv = F.linear(input=x, weight=self.qkv.weight, bias=qkv_bias)
+ qkv = qkv.reshape(B_, N, 3, self.num_heads, -1).permute(2, 0, 3, 1, 4)
+ q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
+
+ # cosine attention
+ attn = (F.normalize(q, dim=-1) @ F.normalize(k, dim=-1).transpose(-2, -1))
+ logit_scale = torch.clamp(self.logit_scale, max=torch.log(torch.tensor(1. / 0.01))).exp()
+ attn = attn * logit_scale
+
+ relative_position_bias_table = self.cpb_mlp(self.relative_coords_table).view(-1, self.num_heads)
+ relative_position_bias = relative_position_bias_table[self.relative_position_index.view(-1)].view(
+ self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
+ relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
+ relative_position_bias = 16 * torch.sigmoid(relative_position_bias)
+ attn = attn + relative_position_bias.unsqueeze(0)
+
+ if mask is not None:
+ nW = mask.shape[0]
+ attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
+ attn = attn.view(-1, self.num_heads, N, N)
+ attn = self.softmax(attn)
+ else:
+ attn = self.softmax(attn)
+
+ attn = self.attn_drop(attn)
+
+ try:
+ x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
+ except:
+ x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)
+
+ x = self.proj(x)
+ x = self.proj_drop(x)
+ return x
+
+ def extra_repr(self) -> str:
+ return f'dim={self.dim}, window_size={self.window_size}, ' \
+ f'pretrained_window_size={self.pretrained_window_size}, num_heads={self.num_heads}'
+
+ def flops(self, N):
+ # calculate flops for 1 window with token length of N
+ flops = 0
+ # qkv = self.qkv(x)
+ flops += N * self.dim * 3 * self.dim
+ # attn = (q @ k.transpose(-2, -1))
+ flops += self.num_heads * N * (self.dim // self.num_heads) * N
+ # x = (attn @ v)
+ flops += self.num_heads * N * N * (self.dim // self.num_heads)
+ # x = self.proj(x)
+ flops += N * self.dim * self.dim
+ return flops
+
+class Mlp_v2(nn.Module):
+ def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):
+ super().__init__()
+ out_features = out_features or in_features
+ hidden_features = hidden_features or in_features
+ self.fc1 = nn.Linear(in_features, hidden_features)
+ self.act = act_layer()
+ self.fc2 = nn.Linear(hidden_features, out_features)
+ self.drop = nn.Dropout(drop)
+
+ def forward(self, x):
+ x = self.fc1(x)
+ x = self.act(x)
+ x = self.drop(x)
+ x = self.fc2(x)
+ x = self.drop(x)
+ return x
+
+
+def window_partition_v2(x, window_size):
+
+ B, H, W, C = x.shape
+ x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
+ windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
+ return windows
+
+
+def window_reverse_v2(windows, window_size, H, W):
+
+ B = int(windows.shape[0] / (H * W / window_size / window_size))
+ x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
+ x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
+ return x
+
+
+class SwinTransformerLayer_v2(nn.Module):
+
+ def __init__(self, dim, num_heads, window_size=7, shift_size=0,
+ mlp_ratio=4., qkv_bias=True, drop=0., attn_drop=0., drop_path=0.,
+ act_layer=nn.SiLU, norm_layer=nn.LayerNorm, pretrained_window_size=0):
+ super().__init__()
+ self.dim = dim
+ #self.input_resolution = input_resolution
+ self.num_heads = num_heads
+ self.window_size = window_size
+ self.shift_size = shift_size
+ self.mlp_ratio = mlp_ratio
+ #if min(self.input_resolution) <= self.window_size:
+ # # if window size is larger than input resolution, we don't partition windows
+ # self.shift_size = 0
+ # self.window_size = min(self.input_resolution)
+ assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
+
+ self.norm1 = norm_layer(dim)
+ self.attn = WindowAttention_v2(
+ dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,
+ qkv_bias=qkv_bias, attn_drop=attn_drop, proj_drop=drop,
+ pretrained_window_size=(pretrained_window_size, pretrained_window_size))
+
+ self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
+ self.norm2 = norm_layer(dim)
+ mlp_hidden_dim = int(dim * mlp_ratio)
+ self.mlp = Mlp_v2(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
+
+ def create_mask(self, H, W):
+ # calculate attention mask for SW-MSA
+ img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
+ h_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ w_slices = (slice(0, -self.window_size),
+ slice(-self.window_size, -self.shift_size),
+ slice(-self.shift_size, None))
+ cnt = 0
+ for h in h_slices:
+ for w in w_slices:
+ img_mask[:, h, w, :] = cnt
+ cnt += 1
+
+ mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
+ mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
+ attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
+ attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
+
+ return attn_mask
+
+ def forward(self, x):
+ # reshape x[b c h w] to x[b l c]
+ _, _, H_, W_ = x.shape
+
+ Padding = False
+ if min(H_, W_) < self.window_size or H_ % self.window_size!=0 or W_ % self.window_size!=0:
+ Padding = True
+ # print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')
+ pad_r = (self.window_size - W_ % self.window_size) % self.window_size
+ pad_b = (self.window_size - H_ % self.window_size) % self.window_size
+ x = F.pad(x, (0, pad_r, 0, pad_b))
+
+ # print('2', x.shape)
+ B, C, H, W = x.shape
+ L = H * W
+ x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c
+
+ # create mask from init to forward
+ if self.shift_size > 0:
+ attn_mask = self.create_mask(H, W).to(x.device)
+ else:
+ attn_mask = None
+
+ shortcut = x
+ x = x.view(B, H, W, C)
+
+ # cyclic shift
+ if self.shift_size > 0:
+ shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
+ else:
+ shifted_x = x
+
+ # partition windows
+ x_windows = window_partition_v2(shifted_x, self.window_size) # nW*B, window_size, window_size, C
+ x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
+
+ # W-MSA/SW-MSA
+ attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C
+
+ # merge windows
+ attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
+ shifted_x = window_reverse_v2(attn_windows, self.window_size, H, W) # B H' W' C
+
+ # reverse cyclic shift
+ if self.shift_size > 0:
+ x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
+ else:
+ x = shifted_x
+ x = x.view(B, H * W, C)
+ x = shortcut + self.drop_path(self.norm1(x))
+
+ # FFN
+ x = x + self.drop_path(self.norm2(self.mlp(x)))
+ x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w
+
+ if Padding:
+ x = x[:, :, :H_, :W_] # reverse padding
+
+ return x
+
+ def extra_repr(self) -> str:
+ return f"dim={self.dim}, input_resolution={self.input_resolution}, num_heads={self.num_heads}, " \
+ f"window_size={self.window_size}, shift_size={self.shift_size}, mlp_ratio={self.mlp_ratio}"
+
+ def flops(self):
+ flops = 0
+ H, W = self.input_resolution
+ # norm1
+ flops += self.dim * H * W
+ # W-MSA/SW-MSA
+ nW = H * W / self.window_size / self.window_size
+ flops += nW * self.attn.flops(self.window_size * self.window_size)
+ # mlp
+ flops += 2 * H * W * self.dim * self.dim * self.mlp_ratio
+ # norm2
+ flops += self.dim * H * W
+ return flops
+
+
+class SwinTransformer2Block(nn.Module):
+ def __init__(self, c1, c2, num_heads, num_layers, window_size=7):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+
+ # remove input_resolution
+ self.blocks = nn.Sequential(*[SwinTransformerLayer_v2(dim=c2, num_heads=num_heads, window_size=window_size,
+ shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)])
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ x = self.blocks(x)
+ return x
+
+
+class ST2CSPA(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPA, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.m(self.cv1(x))
+ y2 = self.cv2(x)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class ST2CSPB(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPB, self).__init__()
+ c_ = int(c2) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ x1 = self.cv1(x)
+ y1 = self.m(x1)
+ y2 = self.cv2(x1)
+ return self.cv3(torch.cat((y1, y2), dim=1))
+
+
+class ST2CSPC(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super(ST2CSPC, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 1, 1)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ num_heads = c_ // 32
+ self.m = SwinTransformer2Block(c_, c_, num_heads, n)
+ #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(torch.cat((y1, y2), dim=1))
+
+##### end of swin transformer v2 #####
diff --git a/oneAPI_ODAV_APP/models/experimental.py b/oneAPI_ODAV_APP/models/experimental.py
new file mode 100644
index 000000000..7ee57156b
--- /dev/null
+++ b/oneAPI_ODAV_APP/models/experimental.py
@@ -0,0 +1,273 @@
+import numpy as np
+import random
+import torch
+import torch.nn as nn
+
+
+from models.common import Conv, DWConv
+from utils.google_utils import attempt_download
+
+
+class CrossConv(nn.Module):
+ # Cross Convolution Downsample
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False):
+ # ch_in, ch_out, kernel, stride, groups, expansion, shortcut
+ super(CrossConv, self).__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, (1, k), (1, s))
+ self.cv2 = Conv(c_, c2, (k, 1), (s, 1), g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class Sum(nn.Module):
+ # Weighted sum of 2 or more layers https://arxiv.org/abs/1911.09070
+ def __init__(self, n, weight=False): # n: number of inputs
+ super(Sum, self).__init__()
+ self.weight = weight # apply weights boolean
+ self.iter = range(n - 1) # iter object
+ if weight:
+ self.w = nn.Parameter(-torch.arange(1., n) / 2, requires_grad=True) # layer weights
+
+ def forward(self, x):
+ y = x[0] # no weight
+ if self.weight:
+ w = torch.sigmoid(self.w) * 2
+ for i in self.iter:
+ y = y + x[i + 1] * w[i]
+ else:
+ for i in self.iter:
+ y = y + x[i + 1]
+ return y
+
+
+class MixConv2d(nn.Module):
+ # Mixed Depthwise Conv https://arxiv.org/abs/1907.09595
+ def __init__(self, c1, c2, k=(1, 3), s=1, equal_ch=True):
+ super(MixConv2d, self).__init__()
+ groups = len(k)
+ if equal_ch: # equal c_ per group
+ i = torch.linspace(0, groups - 1E-6, c2).floor() # c2 indices
+ c_ = [(i == g).sum() for g in range(groups)] # intermediate channels
+ else: # equal weight.numel() per group
+ b = [c2] + [0] * groups
+ a = np.eye(groups + 1, groups, k=-1)
+ a -= np.roll(a, 1, axis=1)
+ a *= np.array(k) ** 2
+ a[0] = 1
+ c_ = np.linalg.lstsq(a, b, rcond=None)[0].round() # solve for equal weight indices, ax = b
+
+ self.m = nn.ModuleList([nn.Conv2d(c1, int(c_[g]), k[g], s, k[g] // 2, bias=False) for g in range(groups)])
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.LeakyReLU(0.1, inplace=True)
+
+ def forward(self, x):
+ return x + self.act(self.bn(torch.cat([m(x) for m in self.m], 1)))
+
+
+class Ensemble(nn.ModuleList):
+ # Ensemble of models
+ def __init__(self):
+ super(Ensemble, self).__init__()
+
+ def forward(self, x, augment=False):
+ y = []
+ for module in self:
+ y.append(module(x, augment)[0])
+ # y = torch.stack(y).max(0)[0] # max ensemble
+ # y = torch.stack(y).mean(0) # mean ensemble
+ y = torch.cat(y, 1) # nms ensemble
+ return y, None # inference, train output
+
+
+
+
+
+class ORT_NMS(torch.autograd.Function):
+ '''ONNX-Runtime NMS operation'''
+ @staticmethod
+ def forward(ctx,
+ boxes,
+ scores,
+ max_output_boxes_per_class=torch.tensor([100]),
+ iou_threshold=torch.tensor([0.45]),
+ score_threshold=torch.tensor([0.25])):
+ device = boxes.device
+ batch = scores.shape[0]
+ num_det = random.randint(0, 100)
+ batches = torch.randint(0, batch, (num_det,)).sort()[0].to(device)
+ idxs = torch.arange(100, 100 + num_det).to(device)
+ zeros = torch.zeros((num_det,), dtype=torch.int64).to(device)
+ selected_indices = torch.cat([batches[None], zeros[None], idxs[None]], 0).T.contiguous()
+ selected_indices = selected_indices.to(torch.int64)
+ return selected_indices
+
+ @staticmethod
+ def symbolic(g, boxes, scores, max_output_boxes_per_class, iou_threshold, score_threshold):
+ return g.op("NonMaxSuppression", boxes, scores, max_output_boxes_per_class, iou_threshold, score_threshold)
+
+
+class TRT_NMS(torch.autograd.Function):
+ '''TensorRT NMS operation'''
+ @staticmethod
+ def forward(
+ ctx,
+ boxes,
+ scores,
+ background_class=-1,
+ box_coding=1,
+ iou_threshold=0.45,
+ max_output_boxes=100,
+ plugin_version="1",
+ score_activation=0,
+ score_threshold=0.25,
+ ):
+ batch_size, num_boxes, num_classes = scores.shape
+ num_det = torch.randint(0, max_output_boxes, (batch_size, 1), dtype=torch.int32)
+ det_boxes = torch.randn(batch_size, max_output_boxes, 4)
+ det_scores = torch.randn(batch_size, max_output_boxes)
+ det_classes = torch.randint(0, num_classes, (batch_size, max_output_boxes), dtype=torch.int32)
+ return num_det, det_boxes, det_scores, det_classes
+
+ @staticmethod
+ def symbolic(g,
+ boxes,
+ scores,
+ background_class=-1,
+ box_coding=1,
+ iou_threshold=0.45,
+ max_output_boxes=100,
+ plugin_version="1",
+ score_activation=0,
+ score_threshold=0.25):
+ out = g.op("TRT::EfficientNMS_TRT",
+ boxes,
+ scores,
+ background_class_i=background_class,
+ box_coding_i=box_coding,
+ iou_threshold_f=iou_threshold,
+ max_output_boxes_i=max_output_boxes,
+ plugin_version_s=plugin_version,
+ score_activation_i=score_activation,
+ score_threshold_f=score_threshold,
+ outputs=4)
+ nums, boxes, scores, classes = out
+ return nums, boxes, scores, classes
+
+
+class ONNX_ORT(nn.Module):
+ '''onnx module with ONNX-Runtime NMS operation.'''
+ def __init__(self, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=640, device=None, n_classes=80):
+ super().__init__()
+ self.device = device if device else torch.device("cpu")
+ self.max_obj = torch.tensor([max_obj]).to(device)
+ self.iou_threshold = torch.tensor([iou_thres]).to(device)
+ self.score_threshold = torch.tensor([score_thres]).to(device)
+ self.max_wh = max_wh # if max_wh != 0 : non-agnostic else : agnostic
+ self.convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=self.device)
+ self.n_classes=n_classes
+
+ def forward(self, x):
+ boxes = x[:, :, :4]
+ conf = x[:, :, 4:5]
+ scores = x[:, :, 5:]
+ if self.n_classes == 1:
+ scores = conf # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ scores *= conf # conf = obj_conf * cls_conf
+ boxes @= self.convert_matrix
+ max_score, category_id = scores.max(2, keepdim=True)
+ dis = category_id.float() * self.max_wh
+ nmsbox = boxes + dis
+ max_score_tp = max_score.transpose(1, 2).contiguous()
+ selected_indices = ORT_NMS.apply(nmsbox, max_score_tp, self.max_obj, self.iou_threshold, self.score_threshold)
+ X, Y = selected_indices[:, 0], selected_indices[:, 2]
+ selected_boxes = boxes[X, Y, :]
+ selected_categories = category_id[X, Y, :].float()
+ selected_scores = max_score[X, Y, :]
+ X = X.unsqueeze(1).float()
+ return torch.cat([X, selected_boxes, selected_categories, selected_scores], 1)
+
+class ONNX_TRT(nn.Module):
+ '''onnx module with TensorRT NMS operation.'''
+ def __init__(self, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=None ,device=None, n_classes=80):
+ super().__init__()
+ assert max_wh is None
+ self.device = device if device else torch.device('cpu')
+ self.background_class = -1,
+ self.box_coding = 1,
+ self.iou_threshold = iou_thres
+ self.max_obj = max_obj
+ self.plugin_version = '1'
+ self.score_activation = 0
+ self.score_threshold = score_thres
+ self.n_classes=n_classes
+
+ def forward(self, x):
+ boxes = x[:, :, :4]
+ conf = x[:, :, 4:5]
+ scores = x[:, :, 5:]
+ if self.n_classes == 1:
+ scores = conf # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ scores *= conf # conf = obj_conf * cls_conf
+ num_det, det_boxes, det_scores, det_classes = TRT_NMS.apply(boxes, scores, self.background_class, self.box_coding,
+ self.iou_threshold, self.max_obj,
+ self.plugin_version, self.score_activation,
+ self.score_threshold)
+ return num_det, det_boxes, det_scores, det_classes
+
+
+class End2End(nn.Module):
+ '''export onnx or tensorrt model with NMS operation.'''
+ def __init__(self, model, max_obj=100, iou_thres=0.45, score_thres=0.25, max_wh=None, device=None, n_classes=80):
+ super().__init__()
+ device = device if device else torch.device('cpu')
+ assert isinstance(max_wh,(int)) or max_wh is None
+ self.model = model.to(device)
+ self.model.model[-1].end2end = True
+ self.patch_model = ONNX_TRT if max_wh is None else ONNX_ORT
+ self.end2end = self.patch_model(max_obj, iou_thres, score_thres, max_wh, device, n_classes)
+ self.end2end.eval()
+
+ def forward(self, x):
+ x = self.model(x)
+ x = self.end2end(x)
+ return x
+
+
+
+
+
+def attempt_load(weights, map_location=None):
+ # Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a
+ model = Ensemble()
+ for w in weights if isinstance(weights, list) else [weights]:
+ attempt_download(w)
+ ckpt = torch.load(w, map_location=map_location) # load
+ model.append(ckpt['ema' if ckpt.get('ema') else 'model'].float().fuse().eval()) # FP32 model
+
+ # Compatibility updates
+ for m in model.modules():
+ if type(m) in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
+ m.inplace = True # pytorch 1.7.0 compatibility
+ elif type(m) is nn.Upsample:
+ m.recompute_scale_factor = None # torch 1.11.0 compatibility
+ elif type(m) is Conv:
+ m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatibility
+
+ if len(model) == 1:
+ return model[-1] # return model
+ else:
+ print('Ensemble created with %s\n' % weights)
+ for k in ['names', 'stride']:
+ setattr(model, k, getattr(model[-1], k))
+ return model # return ensemble
+
+
diff --git a/oneAPI_ODAV_APP/models/yolo.py b/oneAPI_ODAV_APP/models/yolo.py
new file mode 100644
index 000000000..222a962e2
--- /dev/null
+++ b/oneAPI_ODAV_APP/models/yolo.py
@@ -0,0 +1,844 @@
+import argparse
+import logging
+import sys
+from copy import deepcopy
+
+
+sys.path.append('./') # to run '$ python *.py' files in subdirectories
+logger = logging.getLogger(__name__)
+import torch
+from models.common import *
+from models.experimental import *
+from utils.autoanchor import check_anchor_order
+from utils.general import make_divisible, check_file, set_logging
+from utils.torch_utils import time_synchronized, fuse_conv_and_bn, model_info, scale_img, initialize_weights, \
+ select_device, copy_attr
+from utils.loss import SigmoidBin
+
+try:
+ import thop # for FLOPS computation
+except ImportError:
+ thop = None
+
+
+class Detect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(Detect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IDetect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(IDetect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ def fuseforward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ def fuse(self):
+ print("IDetect.fuse")
+ # fuse ImplicitA and Convolution
+ for i in range(len(self.m)):
+ c1,c2,_,_ = self.m[i].weight.shape
+ c1_,c2_, _,_ = self.ia[i].implicit.shape
+ self.m[i].bias += torch.matmul(self.m[i].weight.reshape(c1,c2),self.ia[i].implicit.reshape(c2_,c1_)).squeeze(1)
+
+ # fuse ImplicitM and Convolution
+ for i in range(len(self.m)):
+ c1,c2, _,_ = self.im[i].implicit.shape
+ self.m[i].bias *= self.im[i].implicit.reshape(c2)
+ self.m[i].weight *= self.im[i].implicit.transpose(0,1)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IKeypoint(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, nc=80, anchors=(), nkpt=17, ch=(), inplace=True, dw_conv_kpt=False): # detection layer
+ super(IKeypoint, self).__init__()
+ self.nc = nc # number of classes
+ self.nkpt = nkpt
+ self.dw_conv_kpt = dw_conv_kpt
+ self.no_det=(nc + 5) # number of outputs per anchor for box and class
+ self.no_kpt = 3*self.nkpt ## number of outputs per anchor for keypoints
+ self.no = self.no_det+self.no_kpt
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ self.flip_test = False
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no_det * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no_det * self.na) for _ in ch)
+
+ if self.nkpt is not None:
+ if self.dw_conv_kpt: #keypoint head is slightly more complex
+ self.m_kpt = nn.ModuleList(
+ nn.Sequential(DWConv(x, x, k=3), Conv(x,x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), Conv(x,x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), Conv(x, x),
+ DWConv(x, x, k=3), nn.Conv2d(x, self.no_kpt * self.na, 1)) for x in ch)
+ else: #keypoint head is a single convolution
+ self.m_kpt = nn.ModuleList(nn.Conv2d(x, self.no_kpt * self.na, 1) for x in ch)
+
+ self.inplace = inplace # use in-place ops (e.g. slice assignment)
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ if self.nkpt is None or self.nkpt==0:
+ x[i] = self.im[i](self.m[i](self.ia[i](x[i]))) # conv
+ else :
+ x[i] = torch.cat((self.im[i](self.m[i](self.ia[i](x[i]))), self.m_kpt[i](x[i])), axis=1)
+
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+ x_det = x[i][..., :6]
+ x_kpt = x[i][..., 6:]
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+ kpt_grid_x = self.grid[i][..., 0:1]
+ kpt_grid_y = self.grid[i][..., 1:2]
+
+ if self.nkpt == 0:
+ y = x[i].sigmoid()
+ else:
+ y = x_det.sigmoid()
+
+ if self.inplace:
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i].view(1, self.na, 1, 1, 2) # wh
+ if self.nkpt != 0:
+ x_kpt[..., 0::3] = (x_kpt[..., ::3] * 2. - 0.5 + kpt_grid_x.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ x_kpt[..., 1::3] = (x_kpt[..., 1::3] * 2. - 0.5 + kpt_grid_y.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #x_kpt[..., 0::3] = (x_kpt[..., ::3] + kpt_grid_x.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = (x_kpt[..., 1::3] + kpt_grid_y.repeat(1,1,1,1,17)) * self.stride[i] # xy
+ #print('=============')
+ #print(self.anchor_grid[i].shape)
+ #print(self.anchor_grid[i][...,0].unsqueeze(4).shape)
+ #print(x_kpt[..., 0::3].shape)
+ #x_kpt[..., 0::3] = ((x_kpt[..., 0::3].tanh() * 2.) ** 3 * self.anchor_grid[i][...,0].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_x.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = ((x_kpt[..., 1::3].tanh() * 2.) ** 3 * self.anchor_grid[i][...,1].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_y.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 0::3] = (((x_kpt[..., 0::3].sigmoid() * 4.) ** 2 - 8.) * self.anchor_grid[i][...,0].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_x.repeat(1,1,1,1,17) * self.stride[i] # xy
+ #x_kpt[..., 1::3] = (((x_kpt[..., 1::3].sigmoid() * 4.) ** 2 - 8.) * self.anchor_grid[i][...,1].unsqueeze(4).repeat(1,1,1,1,self.nkpt)) + kpt_grid_y.repeat(1,1,1,1,17) * self.stride[i] # xy
+ x_kpt[..., 2::3] = x_kpt[..., 2::3].sigmoid()
+
+ y = torch.cat((xy, wh, y[..., 4:], x_kpt), dim = -1)
+
+ else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ if self.nkpt != 0:
+ y[..., 6:] = (y[..., 6:] * 2. - 0.5 + self.grid[i].repeat((1,1,1,1,self.nkpt))) * self.stride[i] # xy
+ y = torch.cat((xy, wh, y[..., 4:]), -1)
+
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+
+class IAuxDetect(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+ end2end = False
+ include_nms = False
+ concat = False
+
+ def __init__(self, nc=80, anchors=(), ch=()): # detection layer
+ super(IAuxDetect, self).__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[:self.nl]) # output conv
+ self.m2 = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[self.nl:]) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch[:self.nl])
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch[:self.nl])
+
+ def forward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ x[i+self.nl] = self.m2[i](x[i+self.nl])
+ x[i+self.nl] = x[i+self.nl].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = xy * (2. * self.stride[i]) + (self.stride[i] * (self.grid[i] - 0.5)) # new xy
+ wh = wh ** 2 * (4 * self.anchor_grid[i].data) # new wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1), x[:self.nl])
+
+ def fuseforward(self, x):
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ if not torch.onnx.is_in_onnx_export():
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else:
+ xy = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i].data # wh
+ y = torch.cat((xy, wh, y[..., 4:]), -1)
+ z.append(y.view(bs, -1, self.no))
+
+ if self.training:
+ out = x
+ elif self.end2end:
+ out = torch.cat(z, 1)
+ elif self.include_nms:
+ z = self.convert(z)
+ out = (z, )
+ elif self.concat:
+ out = torch.cat(z, 1)
+ else:
+ out = (torch.cat(z, 1), x)
+
+ return out
+
+ def fuse(self):
+ print("IAuxDetect.fuse")
+ # fuse ImplicitA and Convolution
+ for i in range(len(self.m)):
+ c1,c2,_,_ = self.m[i].weight.shape
+ c1_,c2_, _,_ = self.ia[i].implicit.shape
+ self.m[i].bias += torch.matmul(self.m[i].weight.reshape(c1,c2),self.ia[i].implicit.reshape(c2_,c1_)).squeeze(1)
+
+ # fuse ImplicitM and Convolution
+ for i in range(len(self.m)):
+ c1,c2, _,_ = self.im[i].implicit.shape
+ self.m[i].bias *= self.im[i].implicit.reshape(c2)
+ self.m[i].weight *= self.im[i].implicit.transpose(0,1)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+ def convert(self, z):
+ z = torch.cat(z, 1)
+ box = z[:, :, :4]
+ conf = z[:, :, 4:5]
+ score = z[:, :, 5:]
+ score *= conf
+ convert_matrix = torch.tensor([[1, 0, 1, 0], [0, 1, 0, 1], [-0.5, 0, 0.5, 0], [0, -0.5, 0, 0.5]],
+ dtype=torch.float32,
+ device=z.device)
+ box @= convert_matrix
+ return (box, score)
+
+
+class IBin(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, nc=80, anchors=(), ch=(), bin_count=21): # detection layer
+ super(IBin, self).__init__()
+ self.nc = nc # number of classes
+ self.bin_count = bin_count
+
+ self.w_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0)
+ self.h_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0)
+ # classes, x,y,obj
+ self.no = nc + 3 + \
+ self.w_bin_sigmoid.get_length() + self.h_bin_sigmoid.get_length() # w-bce, h-bce
+ # + self.x_bin_sigmoid.get_length() + self.y_bin_sigmoid.get_length()
+
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
+
+ def forward(self, x):
+
+ #self.x_bin_sigmoid.use_fw_regression = True
+ #self.y_bin_sigmoid.use_fw_regression = True
+ self.w_bin_sigmoid.use_fw_regression = True
+ self.h_bin_sigmoid.use_fw_regression = True
+
+ # x = x.copy() # for profiling
+ z = [] # inference output
+ self.training |= self.export
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ x[i] = self.im[i](x[i])
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
+ #y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+
+
+ #px = (self.x_bin_sigmoid.forward(y[..., 0:12]) + self.grid[i][..., 0]) * self.stride[i]
+ #py = (self.y_bin_sigmoid.forward(y[..., 12:24]) + self.grid[i][..., 1]) * self.stride[i]
+
+ pw = self.w_bin_sigmoid.forward(y[..., 2:24]) * self.anchor_grid[i][..., 0]
+ ph = self.h_bin_sigmoid.forward(y[..., 24:46]) * self.anchor_grid[i][..., 1]
+
+ #y[..., 0] = px
+ #y[..., 1] = py
+ y[..., 2] = pw
+ y[..., 3] = ph
+
+ y = torch.cat((y[..., 0:4], y[..., 46:]), dim=-1)
+
+ z.append(y.view(bs, -1, y.shape[-1]))
+
+ return x if self.training else (torch.cat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+
+class Model(nn.Module):
+ def __init__(self, cfg='yolor-csp-c.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classes
+ super(Model, self).__init__()
+ self.traced = False
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg) as f:
+ self.yaml = yaml.load(f, Loader=yaml.SafeLoader) # model dict
+
+ # Define model
+ ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels
+ if nc and nc != self.yaml['nc']:
+ logger.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ if anchors:
+ logger.info(f'Overriding model.yaml anchors with anchors={anchors}')
+ self.yaml['anchors'] = round(anchors) # override yaml value
+ self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist
+ self.names = [str(i) for i in range(self.yaml['nc'])] # default names
+ # print([x.shape for x in self.forward(torch.zeros(1, ch, 64, 64))])
+
+ # Build strides, anchors
+ m = self.model[-1] # Detect()
+ if isinstance(m, Detect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IDetect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IAuxDetect):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))[:4]]) # forward
+ #print(m.stride)
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_aux_biases() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IBin):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases_bin() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+ if isinstance(m, IKeypoint):
+ s = 256 # 2x min stride
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases_kpt() # only run once
+ # print('Strides: %s' % m.stride.tolist())
+
+ # Init weights, biases
+ initialize_weights(self)
+ self.info()
+ logger.info('')
+
+ def forward(self, x, augment=False, profile=False):
+ if augment:
+ img_size = x.shape[-2:] # height, width
+ s = [1, 0.83, 0.67] # scales
+ f = [None, 3, None] # flips (2-ud, 3-lr)
+ y = [] # outputs
+ for si, fi in zip(s, f):
+ xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
+ yi = self.forward_once(xi)[0] # forward
+ # cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # save
+ yi[..., :4] /= si # de-scale
+ if fi == 2:
+ yi[..., 1] = img_size[0] - yi[..., 1] # de-flip ud
+ elif fi == 3:
+ yi[..., 0] = img_size[1] - yi[..., 0] # de-flip lr
+ y.append(yi)
+ return torch.cat(y, 1), None # augmented inference, train
+ else:
+ return self.forward_once(x, profile) # single-scale inference, train
+
+ def forward_once(self, x, profile=False):
+ y, dt = [], [] # outputs
+ for m in self.model:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+
+ if not hasattr(self, 'traced'):
+ self.traced=False
+
+ if self.traced:
+ if isinstance(m, Detect) or isinstance(m, IDetect) or isinstance(m, IAuxDetect) or isinstance(m, IKeypoint):
+ break
+
+ if profile:
+ c = isinstance(m, (Detect, IDetect, IAuxDetect, IBin))
+ o = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPS
+ for _ in range(10):
+ m(x.copy() if c else x)
+ t = time_synchronized()
+ for _ in range(10):
+ m(x.copy() if c else x)
+ dt.append((time_synchronized() - t) * 100)
+ print('%10.1f%10.0f%10.1fms %-40s' % (o, m.np, dt[-1], m.type))
+
+ x = m(x) # run
+
+ y.append(x if m.i in self.save else None) # save output
+
+ if profile:
+ print('%.1fms total' % sum(dt))
+ return x
+
+ def _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _initialize_aux_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, mi2, s in zip(m.m, m.m2, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+ b2 = mi2.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b2.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b2.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi2.bias = torch.nn.Parameter(b2.view(-1), requires_grad=True)
+
+ def _initialize_biases_bin(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Bin() module
+ bc = m.bin_count
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ old = b[:, (0,1,2,bc+3)].data
+ obj_idx = 2*bc+4
+ b[:, :obj_idx].data += math.log(0.6 / (bc + 1 - 0.99))
+ b[:, obj_idx].data += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b[:, (obj_idx+1):].data += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ b[:, (0,1,2,bc+3)].data = old
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _initialize_biases_kpt(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+ def _print_biases(self):
+ m = self.model[-1] # Detect() module
+ for mi in m.m: # from
+ b = mi.bias.detach().view(m.na, -1).T # conv.bias(255) to (3,85)
+ print(('%6g Conv2d.bias:' + '%10.3g' * 6) % (mi.weight.shape[1], *b[:5].mean(1).tolist(), b[5:].mean()))
+
+ # def _print_weights(self):
+ # for m in self.model.modules():
+ # if type(m) is Bottleneck:
+ # print('%10.3g' % (m.w.detach().sigmoid() * 2)) # shortcut weights
+
+ def fuse(self): # fuse model Conv2d() + BatchNorm2d() layers
+ print('Fusing layers... ')
+ for m in self.model.modules():
+ if isinstance(m, RepConv):
+ #print(f" fuse_repvgg_block")
+ m.fuse_repvgg_block()
+ elif isinstance(m, RepConv_OREPA):
+ #print(f" switch_to_deploy")
+ m.switch_to_deploy()
+ elif type(m) is Conv and hasattr(m, 'bn'):
+ m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
+ delattr(m, 'bn') # remove batchnorm
+ m.forward = m.fuseforward # update forward
+ elif isinstance(m, (IDetect, IAuxDetect)):
+ m.fuse()
+ m.forward = m.fuseforward
+ self.info()
+ return self
+
+ def nms(self, mode=True): # add or remove NMS module
+ present = type(self.model[-1]) is NMS # last layer is NMS
+ if mode and not present:
+ print('Adding NMS... ')
+ m = NMS() # module
+ m.f = -1 # from
+ m.i = self.model[-1].i + 1 # index
+ self.model.add_module(name='%s' % m.i, module=m) # add
+ self.eval()
+ elif not mode and present:
+ print('Removing NMS... ')
+ self.model = self.model[:-1] # remove
+ return self
+
+ def autoshape(self): # add autoShape module
+ print('Adding autoShape... ')
+ m = autoShape(self) # wrap model
+ copy_attr(m, self, include=('yaml', 'nc', 'hyp', 'names', 'stride'), exclude=()) # copy attributes
+ return m
+
+ def info(self, verbose=False, img_size=640): # print model information
+ model_info(self, verbose, img_size)
+
+
+def parse_model(d, ch): # model_dict, input_channels(3)
+ logger.info('\n%3s%18s%3s%10s %-40s%-30s' % ('', 'from', 'n', 'params', 'module', 'arguments'))
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ try:
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+ except:
+ pass
+
+ n = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in [nn.Conv2d, Conv, RobustConv, RobustConv2, DWConv, GhostConv, RepConv, RepConv_OREPA, DownC,
+ SPP, SPPF, SPPCSPC, GhostSPPCSPC, MixConv2d, Focus, Stem, GhostStem, CrossConv,
+ Bottleneck, BottleneckCSPA, BottleneckCSPB, BottleneckCSPC,
+ RepBottleneck, RepBottleneckCSPA, RepBottleneckCSPB, RepBottleneckCSPC,
+ Res, ResCSPA, ResCSPB, ResCSPC,
+ RepRes, RepResCSPA, RepResCSPB, RepResCSPC,
+ ResX, ResXCSPA, ResXCSPB, ResXCSPC,
+ RepResX, RepResXCSPA, RepResXCSPB, RepResXCSPC,
+ Ghost, GhostCSPA, GhostCSPB, GhostCSPC,
+ SwinTransformerBlock, STCSPA, STCSPB, STCSPC,
+ SwinTransformer2Block, ST2CSPA, ST2CSPB, ST2CSPC]:
+ c1, c2 = ch[f], args[0]
+ if c2 != no: # if not output
+ c2 = make_divisible(c2 * gw, 8)
+
+ args = [c1, c2, *args[1:]]
+ if m in [DownC, SPPCSPC, GhostSPPCSPC,
+ BottleneckCSPA, BottleneckCSPB, BottleneckCSPC,
+ RepBottleneckCSPA, RepBottleneckCSPB, RepBottleneckCSPC,
+ ResCSPA, ResCSPB, ResCSPC,
+ RepResCSPA, RepResCSPB, RepResCSPC,
+ ResXCSPA, ResXCSPB, ResXCSPC,
+ RepResXCSPA, RepResXCSPB, RepResXCSPC,
+ GhostCSPA, GhostCSPB, GhostCSPC,
+ STCSPA, STCSPB, STCSPC,
+ ST2CSPA, ST2CSPB, ST2CSPC]:
+ args.insert(2, n) # number of repeats
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum([ch[x] for x in f])
+ elif m is Chuncat:
+ c2 = sum([ch[x] for x in f])
+ elif m is Shortcut:
+ c2 = ch[f[0]]
+ elif m is Foldcut:
+ c2 = ch[f] // 2
+ elif m in [Detect, IDetect, IAuxDetect, IBin, IKeypoint]:
+ args.append([ch[x] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ elif m is ReOrg:
+ c2 = ch[f] * 4
+ elif m is Contract:
+ c2 = ch[f] * args[0] ** 2
+ elif m is Expand:
+ c2 = ch[f] // args[0] ** 2
+ else:
+ c2 = ch[f]
+
+ m_ = nn.Sequential(*[m(*args) for _ in range(n)]) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum([x.numel() for x in m_.parameters()]) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ logger.info('%3s%18s%3s%10.0f %-40s%-30s' % (i, f, n, np, t, args)) # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ if i == 0:
+ ch = []
+ ch.append(c2)
+ return nn.Sequential(*layers), sorted(save)
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--cfg', type=str, default='yolor-csp-c.yaml', help='model.yaml')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--profile', action='store_true', help='profile model speed')
+ opt = parser.parse_args()
+ opt.cfg = check_file(opt.cfg) # check file
+ set_logging()
+ device = select_device(opt.device)
+
+ # Create model
+ model = Model(opt.cfg).to(device)
+ model.train()
+
+ if opt.profile:
+ img = torch.rand(1, 3, 640, 640).to(device)
+ y = model(img, profile=True)
+
+ # Profile
+ # img = torch.rand(8 if torch.cuda.is_available() else 1, 3, 640, 640).to(device)
+ # y = model(img, profile=True)
+
+ # Tensorboard
+ # from torch.utils.tensorboard import SummaryWriter
+ # tb_writer = SummaryWriter()
+ # print("Run 'tensorboard --logdir=models/runs' to view tensorboard at http://localhost:6006/")
+ # tb_writer.add_graph(model.model, img) # add model to tensorboard
+ # tb_writer.add_image('test', img[0], dataformats='CWH') # add model to tensorboard
diff --git a/oneAPI_ODAV_APP/requirements.txt b/oneAPI_ODAV_APP/requirements.txt
new file mode 100644
index 000000000..b8a8c3dc8
--- /dev/null
+++ b/oneAPI_ODAV_APP/requirements.txt
@@ -0,0 +1,47 @@
+EasyTkinter==1.1.0
+Pillow==9.4.0
+opencv-python==4.7.0.68
+pybboxes==0.1.6
+geocoder==1.38.1
+# detectron2
+
+# Usage: pip install -r requirements.txt
+
+# Base ----------------------------------------
+matplotlib>=3.2.2
+numpy>=1.18.5
+PyYAML>=5.3.1
+requests>=2.23.0
+scipy>=1.4.1
+tqdm>=4.41.0
+protobuf<4.21.3
+
+# Logging -------------------------------------
+tensorboard>=2.4.1
+# wandb
+
+# Plotting ------------------------------------
+pandas>=1.1.4
+seaborn>=0.11.0
+
+# Export --------------------------------------
+# coremltools>=4.1 # CoreML export
+# onnx>=1.9.0 # ONNX export
+# onnx-simplifier>=0.3.6 # ONNX simplifier
+# scikit-learn==0.19.2 # CoreML quantization
+# tensorflow>=2.4.1 # TFLite export
+# tensorflowjs>=3.9.0 # TF.js export
+# openvino-dev # OpenVINO export
+
+# Extras --------------------------------------
+ipython # interactive notebook
+psutil # system utilization
+thop # FLOPs computation
+# albumentations>=1.0.3
+# pycocotools>=2.0 # COCO mAP
+# roboflow
+
+
+requests==2.25.0
+configparser==5.0.1
+PyAutoGUI==0.9.52
diff --git a/oneAPI_ODAV_APP/requirements_gpu.txt b/oneAPI_ODAV_APP/requirements_gpu.txt
new file mode 100644
index 000000000..4e565bbfa
--- /dev/null
+++ b/oneAPI_ODAV_APP/requirements_gpu.txt
@@ -0,0 +1,6 @@
+# For Torch GPU
+
+-i https://download.pytorch.org/whl/cu113
+
+torch==1.11.0+cu113
+torchvision==0.12.0+cu113
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/utils/__init__.py b/oneAPI_ODAV_APP/utils/__init__.py
new file mode 100644
index 000000000..a6131c10e
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/__init__.py
@@ -0,0 +1 @@
+# init
diff --git a/oneAPI_ODAV_APP/utils/activations.py b/oneAPI_ODAV_APP/utils/activations.py
new file mode 100644
index 000000000..5ad1735d7
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/activations.py
@@ -0,0 +1,73 @@
+# Activation functions
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+
+# SiLU https://arxiv.org/pdf/1606.08415.pdf ----------------------------------------------------------------------------
+class SiLU(nn.Module): # export-friendly version of nn.SiLU()
+ @staticmethod
+ def forward(x):
+ return x * torch.sigmoid(x)
+
+
+
+class Hardswish(nn.Module): # export-friendly version of nn.Hardswish()
+ @staticmethod
+ def forward(x):
+ # return x * F.hardsigmoid(x) # for torchscript and CoreML
+ return x * F.hardtanh(x + 3, 0., 6.) / 6. # for torchscript, CoreML and ONNX
+
+
+class MemoryEfficientSwish(nn.Module):
+ class F(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x * torch.sigmoid(x)
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ return grad_output * (sx * (1 + x * (1 - sx)))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+# Mish https://github.com/digantamisra98/Mish --------------------------------------------------------------------------
+class Mish(nn.Module):
+ @staticmethod
+ def forward(x):
+ return x * F.softplus(x).tanh()
+
+
+class MemoryEfficientMish(nn.Module):
+ class F(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ fx = F.softplus(x).tanh()
+ return grad_output * (fx + x * sx * (1 - fx * fx))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+# FReLU https://arxiv.org/abs/2007.11824 -------------------------------------------------------------------------------
+class FReLU(nn.Module):
+ def __init__(self, c1, k=3): # ch_in, kernel
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
+ self.bn = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ return torch.max(x, self.bn(self.conv(x)))
diff --git a/oneAPI_ODAV_APP/utils/add_nms.py b/oneAPI_ODAV_APP/utils/add_nms.py
new file mode 100644
index 000000000..30318d94e
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/add_nms.py
@@ -0,0 +1,156 @@
+import numpy as np
+import onnx
+from onnx import shape_inference
+try:
+ import onnx_graphsurgeon as gs
+except Exception as e:
+ print('Import onnx_graphsurgeon failure: %s' % e)
+
+import logging
+
+
+LOGGER = logging.getLogger(__name__)
+
+class RegisterNMS(object):
+ def __init__(
+ self,
+ onnx_model_path: str,
+ precision: str = "fp32",
+ ):
+
+ self.graph = gs.import_onnx(onnx.load(onnx_model_path))
+ assert self.graph
+ LOGGER.info("ONNX graph created successfully")
+ # Fold constants via ONNX-GS that PyTorch2ONNX may have missed
+ self.graph.fold_constants()
+ self.precision = precision
+ self.batch_size = 1
+ def infer(self):
+ """
+ Sanitize the graph by cleaning any unconnected nodes, do a topological resort,
+ and fold constant inputs values. When possible, run shape inference on the
+ ONNX graph to determine tensor shapes.
+ """
+ for _ in range(3):
+ count_before = len(self.graph.nodes)
+
+ self.graph.cleanup().toposort()
+ try:
+ for node in self.graph.nodes:
+ for o in node.outputs:
+ o.shape = None
+ model = gs.export_onnx(self.graph)
+ model = shape_inference.infer_shapes(model)
+ self.graph = gs.import_onnx(model)
+ except Exception as e:
+ LOGGER.info(f"Shape inference could not be performed at this time:\n{e}")
+ try:
+ self.graph.fold_constants(fold_shapes=True)
+ except TypeError as e:
+ LOGGER.error(
+ "This version of ONNX GraphSurgeon does not support folding shapes, "
+ f"please upgrade your onnx_graphsurgeon module. Error:\n{e}"
+ )
+ raise
+
+ count_after = len(self.graph.nodes)
+ if count_before == count_after:
+ # No new folding occurred in this iteration, so we can stop for now.
+ break
+
+ def save(self, output_path):
+ """
+ Save the ONNX model to the given location.
+ Args:
+ output_path: Path pointing to the location where to write
+ out the updated ONNX model.
+ """
+ self.graph.cleanup().toposort()
+ model = gs.export_onnx(self.graph)
+ onnx.save(model, output_path)
+ LOGGER.info(f"Saved ONNX model to {output_path}")
+
+ def register_nms(
+ self,
+ *,
+ score_thresh: float = 0.25,
+ nms_thresh: float = 0.45,
+ detections_per_img: int = 100,
+ ):
+ """
+ Register the ``EfficientNMS_TRT`` plugin node.
+ NMS expects these shapes for its input tensors:
+ - box_net: [batch_size, number_boxes, 4]
+ - class_net: [batch_size, number_boxes, number_labels]
+ Args:
+ score_thresh (float): The scalar threshold for score (low scoring boxes are removed).
+ nms_thresh (float): The scalar threshold for IOU (new boxes that have high IOU
+ overlap with previously selected boxes are removed).
+ detections_per_img (int): Number of best detections to keep after NMS.
+ """
+
+ self.infer()
+ # Find the concat node at the end of the network
+ op_inputs = self.graph.outputs
+ op = "EfficientNMS_TRT"
+ attrs = {
+ "plugin_version": "1",
+ "background_class": -1, # no background class
+ "max_output_boxes": detections_per_img,
+ "score_threshold": score_thresh,
+ "iou_threshold": nms_thresh,
+ "score_activation": False,
+ "box_coding": 0,
+ }
+
+ if self.precision == "fp32":
+ dtype_output = np.float32
+ elif self.precision == "fp16":
+ dtype_output = np.float16
+ else:
+ raise NotImplementedError(f"Currently not supports precision: {self.precision}")
+
+ # NMS Outputs
+ output_num_detections = gs.Variable(
+ name="num_dets",
+ dtype=np.int32,
+ shape=[self.batch_size, 1],
+ ) # A scalar indicating the number of valid detections per batch image.
+ output_boxes = gs.Variable(
+ name="det_boxes",
+ dtype=dtype_output,
+ shape=[self.batch_size, detections_per_img, 4],
+ )
+ output_scores = gs.Variable(
+ name="det_scores",
+ dtype=dtype_output,
+ shape=[self.batch_size, detections_per_img],
+ )
+ output_labels = gs.Variable(
+ name="det_classes",
+ dtype=np.int32,
+ shape=[self.batch_size, detections_per_img],
+ )
+
+ op_outputs = [output_num_detections, output_boxes, output_scores, output_labels]
+
+ # Create the NMS Plugin node with the selected inputs. The outputs of the node will also
+ # become the final outputs of the graph.
+ self.graph.layer(op=op, name="batched_nms", inputs=op_inputs, outputs=op_outputs, attrs=attrs)
+ LOGGER.info(f"Created NMS plugin '{op}' with attributes: {attrs}")
+
+ self.graph.outputs = op_outputs
+
+ self.infer()
+
+ def save(self, output_path):
+ """
+ Save the ONNX model to the given location.
+ Args:
+ output_path: Path pointing to the location where to write
+ out the updated ONNX model.
+ """
+ self.graph.cleanup().toposort()
+ model = gs.export_onnx(self.graph)
+ onnx.save(model, output_path)
+ LOGGER.info(f"Saved ONNX model to {output_path}")
diff --git a/oneAPI_ODAV_APP/utils/autoanchor.py b/oneAPI_ODAV_APP/utils/autoanchor.py
new file mode 100644
index 000000000..2f4bb24ac
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/autoanchor.py
@@ -0,0 +1,161 @@
+# Auto-anchor utils
+
+import numpy as np
+import torch
+import yaml
+from scipy.cluster.vq import kmeans
+from tqdm import tqdm
+
+from utils.general import colorstr
+
+
+
+def check_anchor_order(m):
+ # Check anchor order against stride order for YOLO Detect() module m, and correct if necessary
+ a = m.anchor_grid.prod(-1).view(-1) # anchor area
+ da = a[-1] - a[0] # delta a
+ ds = m.stride[-1] - m.stride[0] # delta s
+ if da.sign() != ds.sign(): # same order
+ print('Reversing anchor order')
+ m.anchors[:] = m.anchors.flip(0)
+ m.anchor_grid[:] = m.anchor_grid.flip(0)
+
+
+def check_anchors(dataset, model, thr=4.0, imgsz=640):
+ # Check anchor fit to data, recompute if necessary
+ prefix = colorstr('autoanchor: ')
+ print(f'\n{prefix}Analyzing anchors... ', end='')
+ m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
+ shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
+ wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
+
+ def metric(k): # compute metric
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1. / r).min(2)[0] # ratio metric
+ best = x.max(1)[0] # best_x
+ aat = (x > 1. / thr).float().sum(1).mean() # anchors above threshold
+ bpr = (best > 1. / thr).float().mean() # best possible recall
+ return bpr, aat
+
+ anchors = m.anchor_grid.clone().cpu().view(-1, 2) # current anchors
+ bpr, aat = metric(anchors)
+ print(f'anchors/target = {aat:.2f}, Best Possible Recall (BPR) = {bpr:.4f}', end='')
+ if bpr < 0.98: # threshold to recompute
+ print('. Attempting to improve anchors, please wait...')
+ na = m.anchor_grid.numel() // 2 # number of anchors
+ try:
+ anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
+ except Exception as e:
+ print(f'{prefix}ERROR: {e}')
+ new_bpr = metric(anchors)[0]
+ if new_bpr > bpr: # replace anchors
+ anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
+ m.anchor_grid[:] = anchors.clone().view_as(m.anchor_grid) # for inference
+ check_anchor_order(m)
+ m.anchors[:] = anchors.clone().view_as(m.anchors) / m.stride.to(m.anchors.device).view(-1, 1, 1) # loss
+ print(f'{prefix}New anchors saved to model. Update model *.yaml to use these anchors in the future.')
+ else:
+ print(f'{prefix}Original anchors better than new anchors. Proceeding with original anchors.')
+ print('') # newline
+
+
+def kmean_anchors(path='./data/coco.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
+ """ Creates kmeans-evolved anchors from training dataset
+
+ Arguments:
+ path: path to dataset *.yaml, or a loaded dataset
+ n: number of anchors
+ img_size: image size used for training
+ thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
+ gen: generations to evolve anchors using genetic algorithm
+ verbose: print all results
+
+ Return:
+ k: kmeans evolved anchors
+
+ Usage:
+ from utils.autoanchor import *; _ = kmean_anchors()
+ """
+ thr = 1. / thr
+ prefix = colorstr('autoanchor: ')
+
+ def metric(k, wh): # compute metrics
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1. / r).min(2)[0] # ratio metric
+ # x = wh_iou(wh, torch.tensor(k)) # iou metric
+ return x, x.max(1)[0] # x, best_x
+
+ def anchor_fitness(k): # mutation fitness
+ _, best = metric(torch.tensor(k, dtype=torch.float32), wh)
+ return (best * (best > thr).float()).mean() # fitness
+
+ def print_results(k):
+ k = k[np.argsort(k.prod(1))] # sort small to large
+ x, best = metric(k, wh0)
+ bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
+ print(f'{prefix}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr')
+ print(f'{prefix}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, '
+ f'past_thr={x[x > thr].mean():.3f}-mean: ', end='')
+ for i, x in enumerate(k):
+ print('%i,%i' % (round(x[0]), round(x[1])), end=', ' if i < len(k) - 1 else '\n') # use in *.cfg
+ return k
+
+ if isinstance(path, str): # *.yaml file
+ with open(path) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # model dict
+ from utils.datasets import LoadImagesAndLabels
+ dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
+ else:
+ dataset = path # dataset
+
+ # Get label wh
+ shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
+
+ # Filter
+ i = (wh0 < 3.0).any(1).sum()
+ if i:
+ print(f'{prefix}WARNING: Extremely small objects found. {i} of {len(wh0)} labels are < 3 pixels in size.')
+ wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ # wh = wh * (np.random.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
+
+ # Kmeans calculation
+ print(f'{prefix}Running kmeans for {n} anchors on {len(wh)} points...')
+ s = wh.std(0) # sigmas for whitening
+ k, dist = kmeans(wh / s, n, iter=30) # points, mean distance
+ assert len(k) == n, print(f'{prefix}ERROR: scipy.cluster.vq.kmeans requested {n} points but returned only {len(k)}')
+ k *= s
+ wh = torch.tensor(wh, dtype=torch.float32) # filtered
+ wh0 = torch.tensor(wh0, dtype=torch.float32) # unfiltered
+ k = print_results(k)
+
+ # Plot
+ # k, d = [None] * 20, [None] * 20
+ # for i in tqdm(range(1, 21)):
+ # k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
+ # ax = ax.ravel()
+ # ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
+ # ax[0].hist(wh[wh[:, 0]<100, 0],400)
+ # ax[1].hist(wh[wh[:, 1]<100, 1],400)
+ # fig.savefig('wh.png', dpi=200)
+
+ # Evolve
+ npr = np.random
+ f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
+ pbar = tqdm(range(gen), desc=f'{prefix}Evolving anchors with Genetic Algorithm:') # progress bar
+ for _ in pbar:
+ v = np.ones(sh)
+ while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
+ v = ((npr.random(sh) < mp) * npr.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
+ kg = (k.copy() * v).clip(min=2.0)
+ fg = anchor_fitness(kg)
+ if fg > f:
+ f, k = fg, kg.copy()
+ pbar.desc = f'{prefix}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
+ if verbose:
+ print_results(k)
+
+ return print_results(k)
diff --git a/oneAPI_ODAV_APP/utils/aws/__init__.py b/oneAPI_ODAV_APP/utils/aws/__init__.py
new file mode 100644
index 000000000..e2cbd5382
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/aws/__init__.py
@@ -0,0 +1 @@
+#init
diff --git a/oneAPI_ODAV_APP/utils/aws/mime.sh b/oneAPI_ODAV_APP/utils/aws/mime.sh
new file mode 100644
index 000000000..cd595644c
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/aws/mime.sh
@@ -0,0 +1,27 @@
+# AWS EC2 instance startup 'MIME' script https://aws.amazon.com/premiumsupport/knowledge-center/execute-user-data-ec2/
+# This script will run on every instance restart, not only on first start
+# --- DO NOT COPY ABOVE COMMENTS WHEN PASTING INTO USERDATA ---
+
+
+Content-Type: multipart/mixed; boundary="//"
+MIME-Version: 1.0
+
+--//
+Content-Type: text/cloud-config; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="cloud-config.txt"
+
+#cloud-config
+cloud_final_modules:
+- [scripts-user, always]
+
+--//
+Content-Type: text/x-shellscript; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="userdata.txt"
+
+#!/bin/bash
+# --- paste contents of userdata.sh here ---
+--//
diff --git a/oneAPI_ODAV_APP/utils/aws/resume.py b/oneAPI_ODAV_APP/utils/aws/resume.py
new file mode 100644
index 000000000..ce7dcde6f
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/aws/resume.py
@@ -0,0 +1,38 @@
+# Resume all interrupted trainings in yolor/ dir including DDP trainings
+# Usage: $ python utils/aws/resume.py
+
+import os
+import sys
+from pathlib import Path
+
+import torch
+import yaml
+
+
+sys.path.append('./') # to run '$ python *.py' files in subdirectories
+
+port = 0 # --master_port
+path = Path('').resolve()
+for last in path.rglob('*/**/last.pt'):
+ ckpt = torch.load(last)
+ if ckpt['optimizer'] is None:
+ continue
+
+ # Load opt.yaml
+ with open(last.parent.parent / 'opt.yaml') as f:
+ opt = yaml.load(f, Loader=yaml.SafeLoader)
+
+ # Get device count
+ d = opt['device'].split(',') # devices
+ nd = len(d) # number of devices
+ ddp = nd > 1 or (nd == 0 and torch.cuda.device_count() > 1) # distributed data parallel
+
+ if ddp: # multi-GPU
+ port += 1
+ cmd = f'python -m torch.distributed.launch --nproc_per_node {nd} --master_port {port} train.py --resume {last}'
+ else: # single-GPU
+ cmd = f'python train.py --resume {last}'
+
+ cmd += ' > /dev/null 2>&1 &' # redirect output to dev/null and run in daemon thread
+ print(cmd)
+ os.system(cmd)
diff --git a/oneAPI_ODAV_APP/utils/aws/userdata.sh b/oneAPI_ODAV_APP/utils/aws/userdata.sh
new file mode 100644
index 000000000..da731b9f5
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/aws/userdata.sh
@@ -0,0 +1,28 @@
+#!/bin/bash
+# AWS EC2 instance startup script https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/user-data.html
+# This script will run only once on first instance start (for a re-start script see mime.sh)
+# /home/ubuntu (ubuntu) or /home/ec2-user (amazon-linux) is working dir
+# Use >300 GB SSD
+
+
+cd home/ubuntu
+if [ ! -d yolor ]; then
+ echo "Running first-time script." # install dependencies, download COCO, pull Docker
+ git clone -b main https://github.com/WongKinYiu/yolov7 && sudo chmod -R 777 yolov7
+ cd yolov7
+ bash data/scripts/get_coco.sh && echo "Data done." &
+ sudo docker pull nvcr.io/nvidia/pytorch:21.08-py3 && echo "Docker done." &
+ python -m pip install --upgrade pip && pip install -r requirements.txt && python detect.py && echo "Requirements done." &
+ wait && echo "All tasks done." # finish background tasks
+else
+ echo "Running re-start script." # resume interrupted runs
+ i=0
+ list=$(sudo docker ps -qa) # container list i.e. $'one\ntwo\nthree\nfour'
+ while IFS= read -r id; do
+ ((i++))
+ echo "restarting container $i: $id"
+ sudo docker start $id
+ # sudo docker exec -it $id python train.py --resume # single-GPU
+ sudo docker exec -d $id python utils/aws/resume.py # multi-scenario
+ done <<<"$list"
+fi
diff --git a/oneAPI_ODAV_APP/utils/datasets.py b/oneAPI_ODAV_APP/utils/datasets.py
new file mode 100644
index 000000000..d471515ec
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/datasets.py
@@ -0,0 +1,1321 @@
+# Dataset utils and dataloaders
+
+import glob
+import logging
+import math
+import os
+import random
+import shutil
+import time
+from itertools import repeat
+from multiprocessing.pool import ThreadPool
+from pathlib import Path
+from threading import Thread
+
+import cv2
+import numpy as np
+import torch
+import torch.nn.functional as F
+from PIL import Image, ExifTags
+from torch.utils.data import Dataset
+from tqdm import tqdm
+
+import pickle
+from copy import deepcopy
+#from pycocotools import mask as maskUtils
+from torchvision.utils import save_image
+from torchvision.ops import roi_pool, roi_align, ps_roi_pool, ps_roi_align
+
+from utils.general import check_requirements, xyxy2xywh, xywh2xyxy, xywhn2xyxy, xyn2xy, segment2box, segments2boxes, \
+ resample_segments, clean_str
+from utils.torch_utils import torch_distributed_zero_first
+
+
+# Parameters
+help_url = 'https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
+img_formats = ['bmp', 'jpg', 'jpeg', 'png', 'tif', 'tiff', 'dng', 'webp', 'mpo'] # acceptable image suffixes
+vid_formats = ['mov', 'avi', 'mp4', 'mpg', 'mpeg', 'm4v', 'wmv', 'mkv'] # acceptable video suffixes
+logger = logging.getLogger(__name__)
+
+# Get orientation exif tag
+for orientation in ExifTags.TAGS.keys():
+ if ExifTags.TAGS[orientation] == 'Orientation':
+ break
+
+
+def get_hash(files):
+ # Returns a single hash value of a list of files
+ return sum(os.path.getsize(f) for f in files if os.path.isfile(f))
+
+
+def exif_size(img):
+ # Returns exif-corrected PIL size
+ s = img.size # (width, height)
+ try:
+ rotation = dict(img._getexif().items())[orientation]
+ if rotation == 6: # rotation 270
+ s = (s[1], s[0])
+ elif rotation == 8: # rotation 90
+ s = (s[1], s[0])
+ except:
+ pass
+
+ return s
+
+
+def create_dataloader(path, imgsz, batch_size, stride, opt, hyp=None, augment=False, cache=False, pad=0.0, rect=False,
+ rank=-1, world_size=1, workers=8, image_weights=False, quad=False, prefix=''):
+ # Make sure only the first process in DDP process the dataset first, and the following others can use the cache
+ with torch_distributed_zero_first(rank):
+ dataset = LoadImagesAndLabels(path, imgsz, batch_size,
+ augment=augment, # augment images
+ hyp=hyp, # augmentation hyperparameters
+ rect=rect, # rectangular training
+ cache_images=cache,
+ single_cls=opt.single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix)
+
+ batch_size = min(batch_size, len(dataset))
+ nw = min([os.cpu_count() // world_size, batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = torch.utils.data.distributed.DistributedSampler(dataset) if rank != -1 else None
+ loader = torch.utils.data.DataLoader if image_weights else InfiniteDataLoader
+ # Use torch.utils.data.DataLoader() if dataset.properties will update during training else InfiniteDataLoader()
+ dataloader = loader(dataset,
+ batch_size=batch_size,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn)
+ return dataloader, dataset
+
+
+class InfiniteDataLoader(torch.utils.data.dataloader.DataLoader):
+ """ Dataloader that reuses workers
+
+ Uses same syntax as vanilla DataLoader
+ """
+
+ def __init__(self, *args, **kwargs):
+ super().__init__(*args, **kwargs)
+ object.__setattr__(self, 'batch_sampler', _RepeatSampler(self.batch_sampler))
+ self.iterator = super().__iter__()
+
+ def __len__(self):
+ return len(self.batch_sampler.sampler)
+
+ def __iter__(self):
+ for i in range(len(self)):
+ yield next(self.iterator)
+
+
+class _RepeatSampler(object):
+ """ Sampler that repeats forever
+
+ Args:
+ sampler (Sampler)
+ """
+
+ def __init__(self, sampler):
+ self.sampler = sampler
+
+ def __iter__(self):
+ while True:
+ yield from iter(self.sampler)
+
+
+class LoadImages: # for inference
+ def __init__(self, path, img_size=640, stride=32):
+ p = str(Path(path).absolute()) # os-agnostic absolute path
+ if '*' in p:
+ files = sorted(glob.glob(p, recursive=True)) # glob
+ elif os.path.isdir(p):
+ files = sorted(glob.glob(os.path.join(p, '*.*'))) # dir
+ elif os.path.isfile(p):
+ files = [p] # files
+ else:
+ raise Exception(f'ERROR: {p} does not exist')
+
+ images = [x for x in files if x.split('.')[-1].lower() in img_formats]
+ videos = [x for x in files if x.split('.')[-1].lower() in vid_formats]
+ ni, nv = len(images), len(videos)
+
+ self.img_size = img_size
+ self.stride = stride
+ self.files = images + videos
+ self.nf = ni + nv # number of files
+ self.video_flag = [False] * ni + [True] * nv
+ self.mode = 'image'
+ if any(videos):
+ self.new_video(videos[0]) # new video
+ else:
+ self.cap = None
+ assert self.nf > 0, f'No images or videos found in {p}. ' \
+ f'Supported formats are:\nimages: {img_formats}\nvideos: {vid_formats}'
+
+ def __iter__(self):
+ self.count = 0
+ return self
+
+ def __next__(self):
+ if self.count == self.nf:
+ raise StopIteration
+ path = self.files[self.count]
+
+ if self.video_flag[self.count]:
+ # Read video
+ self.mode = 'video'
+ ret_val, img0 = self.cap.read()
+ if not ret_val:
+ self.count += 1
+ self.cap.release()
+ if self.count == self.nf: # last video
+ raise StopIteration
+ else:
+ path = self.files[self.count]
+ self.new_video(path)
+ ret_val, img0 = self.cap.read()
+
+ self.frame += 1
+ print(f'video {self.count + 1}/{self.nf} ({self.frame}/{self.nframes}) {path}: ', end='')
+
+ else:
+ # Read image
+ self.count += 1
+ img0 = cv2.imread(path) # BGR
+ assert img0 is not None, 'Image Not Found ' + path
+ #print(f'image {self.count}/{self.nf} {path}: ', end='')
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return path, img, img0, self.cap
+
+ def new_video(self, path):
+ self.frame = 0
+ self.cap = cv2.VideoCapture(path)
+ self.nframes = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
+
+ def __len__(self):
+ return self.nf # number of files
+
+
+class LoadWebcam: # for inference
+ def __init__(self, pipe='0', img_size=640, stride=32):
+ self.img_size = img_size
+ self.stride = stride
+
+ if pipe.isnumeric():
+ pipe = eval(pipe) # local camera
+ # pipe = 'rtsp://192.168.1.64/1' # IP camera
+ # pipe = 'rtsp://username:password@192.168.1.64/1' # IP camera with login
+ # pipe = 'http://wmccpinetop.axiscam.net/mjpg/video.mjpg' # IP golf camera
+
+ self.pipe = pipe
+ self.cap = cv2.VideoCapture(pipe) # video capture object
+ self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ self.cap.release()
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Read frame
+ if self.pipe == 0: # local camera
+ ret_val, img0 = self.cap.read()
+ img0 = cv2.flip(img0, 1) # flip left-right
+ else: # IP camera
+ n = 0
+ while True:
+ n += 1
+ self.cap.grab()
+ if n % 30 == 0: # skip frames
+ ret_val, img0 = self.cap.retrieve()
+ if ret_val:
+ break
+
+ # Print
+ assert ret_val, f'Camera Error {self.pipe}'
+ img_path = 'webcam.jpg'
+ print(f'webcam {self.count}: ', end='')
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return img_path, img, img0, None
+
+ def __len__(self):
+ return 0
+
+
+class LoadStreams: # multiple IP or RTSP cameras
+ def __init__(self, sources='streams.txt', img_size=640, stride=32):
+ self.mode = 'stream'
+ self.img_size = img_size
+ self.stride = stride
+
+ if os.path.isfile(sources):
+ with open(sources, 'r') as f:
+ sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
+ else:
+ sources = [sources]
+
+ n = len(sources)
+ self.imgs = [None] * n
+ self.sources = [clean_str(x) for x in sources] # clean source names for later
+ for i, s in enumerate(sources):
+ # Start the thread to read frames from the video stream
+ print(f'{i + 1}/{n}: {s}... ', end='')
+ url = eval(s) if s.isnumeric() else s
+ if 'youtube.com/' in str(url) or 'youtu.be/' in str(url): # if source is YouTube video
+ check_requirements(('pafy', 'youtube_dl'))
+ import pafy
+ url = pafy.new(url).getbest(preftype="mp4").url
+ cap = cv2.VideoCapture(url)
+ assert cap.isOpened(), f'Failed to open {s}'
+ w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ self.fps = cap.get(cv2.CAP_PROP_FPS) % 100
+
+ _, self.imgs[i] = cap.read() # guarantee first frame
+ thread = Thread(target=self.update, args=([i, cap]), daemon=True)
+ print(f' success ({w}x{h} at {self.fps:.2f} FPS).')
+ thread.start()
+ print('') # newline
+
+ # check for common shapes
+ s = np.stack([letterbox(x, self.img_size, stride=self.stride)[0].shape for x in self.imgs], 0) # shapes
+ self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
+ if not self.rect:
+ print('WARNING: Different stream shapes detected. For optimal performance supply similarly-shaped streams.')
+
+ def update(self, index, cap):
+ # Read next stream frame in a daemon thread
+ n = 0
+ while cap.isOpened():
+ n += 1
+ # _, self.imgs[index] = cap.read()
+ cap.grab()
+ if n == 4: # read every 4th frame
+ success, im = cap.retrieve()
+ self.imgs[index] = im if success else self.imgs[index] * 0
+ n = 0
+ time.sleep(1 / self.fps) # wait time
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ img0 = self.imgs.copy()
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Letterbox
+ img = [letterbox(x, self.img_size, auto=self.rect, stride=self.stride)[0] for x in img0]
+
+ # Stack
+ img = np.stack(img, 0)
+
+ # Convert
+ img = img[:, :, :, ::-1].transpose(0, 3, 1, 2) # BGR to RGB, to bsx3x416x416
+ img = np.ascontiguousarray(img)
+
+ return self.sources, img, img0, None
+
+ def __len__(self):
+ return 0 # 1E12 frames = 32 streams at 30 FPS for 30 years
+
+
+def img2label_paths(img_paths):
+ # Define label paths as a function of image paths
+ sa, sb = os.sep + 'images' + os.sep, os.sep + 'labels' + os.sep # /images/, /labels/ substrings
+ return ['txt'.join(x.replace(sa, sb, 1).rsplit(x.split('.')[-1], 1)) for x in img_paths]
+
+
+class LoadImagesAndLabels(Dataset): # for training/testing
+ def __init__(self, path, img_size=640, batch_size=16, augment=False, hyp=None, rect=False, image_weights=False,
+ cache_images=False, single_cls=False, stride=32, pad=0.0, prefix=''):
+ self.img_size = img_size
+ self.augment = augment
+ self.hyp = hyp
+ self.image_weights = image_weights
+ self.rect = False if image_weights else rect
+ self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
+ self.mosaic_border = [-img_size // 2, -img_size // 2]
+ self.stride = stride
+ self.path = path
+ #self.albumentations = Albumentations() if augment else None
+
+ try:
+ f = [] # image files
+ for p in path if isinstance(path, list) else [path]:
+ p = Path(p) # os-agnostic
+ if p.is_dir(): # dir
+ f += glob.glob(str(p / '**' / '*.*'), recursive=True)
+ # f = list(p.rglob('**/*.*')) # pathlib
+ elif p.is_file(): # file
+ with open(p, 'r') as t:
+ t = t.read().strip().splitlines()
+ parent = str(p.parent) + os.sep
+ f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
+ # f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
+ else:
+ raise Exception(f'{prefix}{p} does not exist')
+ self.img_files = sorted([x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in img_formats])
+ # self.img_files = sorted([x for x in f if x.suffix[1:].lower() in img_formats]) # pathlib
+ assert self.img_files, f'{prefix}No images found'
+ except Exception as e:
+ raise Exception(f'{prefix}Error loading data from {path}: {e}\nSee {help_url}')
+
+ # Check cache
+ self.label_files = img2label_paths(self.img_files) # labels
+ cache_path = (p if p.is_file() else Path(self.label_files[0]).parent).with_suffix('.cache') # cached labels
+ if cache_path.is_file():
+ cache, exists = torch.load(cache_path), True # load
+ #if cache['hash'] != get_hash(self.label_files + self.img_files) or 'version' not in cache: # changed
+ # cache, exists = self.cache_labels(cache_path, prefix), False # re-cache
+ else:
+ cache, exists = self.cache_labels(cache_path, prefix), False # cache
+
+ # Display cache
+ nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupted, total
+ if exists:
+ d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupted"
+ tqdm(None, desc=prefix + d, total=n, initial=n) # display cache results
+ assert nf > 0 or not augment, f'{prefix}No labels in {cache_path}. Can not train without labels. See {help_url}'
+
+ # Read cache
+ cache.pop('hash') # remove hash
+ cache.pop('version') # remove version
+ labels, shapes, self.segments = zip(*cache.values())
+ self.labels = list(labels)
+ self.shapes = np.array(shapes, dtype=np.float64)
+ self.img_files = list(cache.keys()) # update
+ self.label_files = img2label_paths(cache.keys()) # update
+ if single_cls:
+ for x in self.labels:
+ x[:, 0] = 0
+
+ n = len(shapes) # number of images
+ bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
+ nb = bi[-1] + 1 # number of batches
+ self.batch = bi # batch index of image
+ self.n = n
+ self.indices = range(n)
+
+ # Rectangular Training
+ if self.rect:
+ # Sort by aspect ratio
+ s = self.shapes # wh
+ ar = s[:, 1] / s[:, 0] # aspect ratio
+ irect = ar.argsort()
+ self.img_files = [self.img_files[i] for i in irect]
+ self.label_files = [self.label_files[i] for i in irect]
+ self.labels = [self.labels[i] for i in irect]
+ self.shapes = s[irect] # wh
+ ar = ar[irect]
+
+ # Set training image shapes
+ shapes = [[1, 1]] * nb
+ for i in range(nb):
+ ari = ar[bi == i]
+ mini, maxi = ari.min(), ari.max()
+ if maxi < 1:
+ shapes[i] = [maxi, 1]
+ elif mini > 1:
+ shapes[i] = [1, 1 / mini]
+
+ self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(np.int) * stride
+
+ # Cache images into memory for faster training (WARNING: large datasets may exceed system RAM)
+ self.imgs = [None] * n
+ if cache_images:
+ if cache_images == 'disk':
+ self.im_cache_dir = Path(Path(self.img_files[0]).parent.as_posix() + '_npy')
+ self.img_npy = [self.im_cache_dir / Path(f).with_suffix('.npy').name for f in self.img_files]
+ self.im_cache_dir.mkdir(parents=True, exist_ok=True)
+ gb = 0 # Gigabytes of cached images
+ self.img_hw0, self.img_hw = [None] * n, [None] * n
+ results = ThreadPool(8).imap(lambda x: load_image(*x), zip(repeat(self), range(n)))
+ pbar = tqdm(enumerate(results), total=n)
+ for i, x in pbar:
+ if cache_images == 'disk':
+ if not self.img_npy[i].exists():
+ np.save(self.img_npy[i].as_posix(), x[0])
+ gb += self.img_npy[i].stat().st_size
+ else:
+ self.imgs[i], self.img_hw0[i], self.img_hw[i] = x
+ gb += self.imgs[i].nbytes
+ pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB)'
+ pbar.close()
+
+ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
+ # Cache dataset labels, check images and read shapes
+ x = {} # dict
+ nm, nf, ne, nc = 0, 0, 0, 0 # number missing, found, empty, duplicate
+ pbar = tqdm(zip(self.img_files, self.label_files), desc='Scanning images', total=len(self.img_files))
+ for i, (im_file, lb_file) in enumerate(pbar):
+ try:
+ # verify images
+ im = Image.open(im_file)
+ im.verify() # PIL verify
+ shape = exif_size(im) # image size
+ segments = [] # instance segments
+ assert (shape[0] > 9) & (shape[1] > 9), f'image size {shape} <10 pixels'
+ assert im.format.lower() in img_formats, f'invalid image format {im.format}'
+
+ # verify labels
+ if os.path.isfile(lb_file):
+ nf += 1 # label found
+ with open(lb_file, 'r') as f:
+ l = [x.split() for x in f.read().strip().splitlines()]
+ if any([len(x) > 8 for x in l]): # is segment
+ classes = np.array([x[0] for x in l], dtype=np.float32)
+ segments = [np.array(x[1:], dtype=np.float32).reshape(-1, 2) for x in l] # (cls, xy1...)
+ l = np.concatenate((classes.reshape(-1, 1), segments2boxes(segments)), 1) # (cls, xywh)
+ l = np.array(l, dtype=np.float32)
+ if len(l):
+ assert l.shape[1] == 5, 'labels require 5 columns each'
+ assert (l >= 0).all(), 'negative labels'
+ assert (l[:, 1:] <= 1).all(), 'non-normalized or out of bounds coordinate labels'
+ assert np.unique(l, axis=0).shape[0] == l.shape[0], 'duplicate labels'
+ else:
+ ne += 1 # label empty
+ l = np.zeros((0, 5), dtype=np.float32)
+ else:
+ nm += 1 # label missing
+ l = np.zeros((0, 5), dtype=np.float32)
+ x[im_file] = [l, shape, segments]
+ except Exception as e:
+ nc += 1
+ print(f'{prefix}WARNING: Ignoring corrupted image and/or label {im_file}: {e}')
+
+ pbar.desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels... " \
+ f"{nf} found, {nm} missing, {ne} empty, {nc} corrupted"
+ pbar.close()
+
+ if nf == 0:
+ print(f'{prefix}WARNING: No labels found in {path}. See {help_url}')
+
+ x['hash'] = get_hash(self.label_files + self.img_files)
+ x['results'] = nf, nm, ne, nc, i + 1
+ x['version'] = 0.1 # cache version
+ torch.save(x, path) # save for next time
+ logging.info(f'{prefix}New cache created: {path}')
+ return x
+
+ def __len__(self):
+ return len(self.img_files)
+
+ # def __iter__(self):
+ # self.count = -1
+ # print('ran dataset iter')
+ # #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
+ # return self
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ if mosaic:
+ # Load mosaic
+ if random.random() < 0.8:
+ img, labels = load_mosaic(self, index)
+ else:
+ img, labels = load_mosaic9(self, index)
+ shapes = None
+
+ # MixUp https://arxiv.org/pdf/1710.09412.pdf
+ if random.random() < hyp['mixup']:
+ if random.random() < 0.8:
+ img2, labels2 = load_mosaic(self, random.randint(0, len(self.labels) - 1))
+ else:
+ img2, labels2 = load_mosaic9(self, random.randint(0, len(self.labels) - 1))
+ r = np.random.beta(8.0, 8.0) # mixup ratio, alpha=beta=8.0
+ img = (img * r + img2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = load_image(self, index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ # Augment imagespace
+ if not mosaic:
+ img, labels = random_perspective(img, labels,
+ degrees=hyp['degrees'],
+ translate=hyp['translate'],
+ scale=hyp['scale'],
+ shear=hyp['shear'],
+ perspective=hyp['perspective'])
+
+
+ #img, labels = self.albumentations(img, labels)
+
+ # Augment colorspace
+ augment_hsv(img, hgain=hyp['hsv_h'], sgain=hyp['hsv_s'], vgain=hyp['hsv_v'])
+
+ # Apply cutouts
+ # if random.random() < 0.9:
+ # labels = cutout(img, labels)
+
+ if random.random() < hyp['paste_in']:
+ sample_labels, sample_images, sample_masks = [], [], []
+ while len(sample_labels) < 30:
+ sample_labels_, sample_images_, sample_masks_ = load_samples(self, random.randint(0, len(self.labels) - 1))
+ sample_labels += sample_labels_
+ sample_images += sample_images_
+ sample_masks += sample_masks_
+ #print(len(sample_labels))
+ if len(sample_labels) == 0:
+ break
+ labels = pastein(img, labels, sample_labels, sample_images, sample_masks)
+
+ nL = len(labels) # number of labels
+ if nL:
+ labels[:, 1:5] = xyxy2xywh(labels[:, 1:5]) # convert xyxy to xywh
+ labels[:, [2, 4]] /= img.shape[0] # normalized height 0-1
+ labels[:, [1, 3]] /= img.shape[1] # normalized width 0-1
+
+ if self.augment:
+ # flip up-down
+ if random.random() < hyp['flipud']:
+ img = np.flipud(img)
+ if nL:
+ labels[:, 2] = 1 - labels[:, 2]
+
+ # flip left-right
+ if random.random() < hyp['fliplr']:
+ img = np.fliplr(img)
+ if nL:
+ labels[:, 1] = 1 - labels[:, 1]
+
+ labels_out = torch.zeros((nL, 6))
+ if nL:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ img = np.ascontiguousarray(img)
+
+ return torch.from_numpy(img), labels_out, self.img_files[index], shapes
+
+ @staticmethod
+ def collate_fn(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ for i, l in enumerate(label):
+ l[:, 0] = i # add target image index for build_targets()
+ return torch.stack(img, 0), torch.cat(label, 0), path, shapes
+
+ @staticmethod
+ def collate_fn4(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ n = len(shapes) // 4
+ img4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
+
+ ho = torch.tensor([[0., 0, 0, 1, 0, 0]])
+ wo = torch.tensor([[0., 0, 1, 0, 0, 0]])
+ s = torch.tensor([[1, 1, .5, .5, .5, .5]]) # scale
+ for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
+ i *= 4
+ if random.random() < 0.5:
+ im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2., mode='bilinear', align_corners=False)[
+ 0].type(img[i].type())
+ l = label[i]
+ else:
+ im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
+ l = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
+ img4.append(im)
+ label4.append(l)
+
+ for i, l in enumerate(label4):
+ l[:, 0] = i # add target image index for build_targets()
+
+ return torch.stack(img4, 0), torch.cat(label4, 0), path4, shapes4
+
+
+# Ancillary functions --------------------------------------------------------------------------------------------------
+def load_image(self, index):
+ # loads 1 image from dataset, returns img, original hw, resized hw
+ img = self.imgs[index]
+ if img is None: # not cached
+ path = self.img_files[index]
+ img = cv2.imread(path) # BGR
+ assert img is not None, 'Image Not Found ' + path
+ h0, w0 = img.shape[:2] # orig hw
+ r = self.img_size / max(h0, w0) # resize image to img_size
+ if r != 1: # always resize down, only resize up if training with augmentation
+ interp = cv2.INTER_AREA if r < 1 and not self.augment else cv2.INTER_LINEAR
+ img = cv2.resize(img, (int(w0 * r), int(h0 * r)), interpolation=interp)
+ return img, (h0, w0), img.shape[:2] # img, hw_original, hw_resized
+ else:
+ return self.imgs[index], self.img_hw0[index], self.img_hw[index] # img, hw_original, hw_resized
+
+
+def augment_hsv(img, hgain=0.5, sgain=0.5, vgain=0.5):
+ r = np.random.uniform(-1, 1, 3) * [hgain, sgain, vgain] + 1 # random gains
+ hue, sat, val = cv2.split(cv2.cvtColor(img, cv2.COLOR_BGR2HSV))
+ dtype = img.dtype # uint8
+
+ x = np.arange(0, 256, dtype=np.int16)
+ lut_hue = ((x * r[0]) % 180).astype(dtype)
+ lut_sat = np.clip(x * r[1], 0, 255).astype(dtype)
+ lut_val = np.clip(x * r[2], 0, 255).astype(dtype)
+
+ img_hsv = cv2.merge((cv2.LUT(hue, lut_hue), cv2.LUT(sat, lut_sat), cv2.LUT(val, lut_val))).astype(dtype)
+ cv2.cvtColor(img_hsv, cv2.COLOR_HSV2BGR, dst=img) # no return needed
+
+
+def hist_equalize(img, clahe=True, bgr=False):
+ # Equalize histogram on BGR image 'img' with img.shape(n,m,3) and range 0-255
+ yuv = cv2.cvtColor(img, cv2.COLOR_BGR2YUV if bgr else cv2.COLOR_RGB2YUV)
+ if clahe:
+ c = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
+ yuv[:, :, 0] = c.apply(yuv[:, :, 0])
+ else:
+ yuv[:, :, 0] = cv2.equalizeHist(yuv[:, :, 0]) # equalize Y channel histogram
+ return cv2.cvtColor(yuv, cv2.COLOR_YUV2BGR if bgr else cv2.COLOR_YUV2RGB) # convert YUV image to RGB
+
+
+def load_mosaic(self, index):
+ # loads images in a 4-mosaic
+
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ #img4, labels4, segments4 = remove_background(img4, labels4, segments4)
+ #sample_segments(img4, labels4, segments4, probability=self.hyp['copy_paste'])
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, probability=self.hyp['copy_paste'])
+ img4, labels4 = random_perspective(img4, labels4, segments4,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img4, labels4
+
+
+def load_mosaic9(self, index):
+ # loads images in a 9-mosaic
+
+ labels9, segments9 = [], []
+ s = self.img_size
+ indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img9
+ if i == 0: # center
+ img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ h0, w0 = h, w
+ c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
+ elif i == 1: # top
+ c = s, s - h, s + w, s
+ elif i == 2: # top right
+ c = s + wp, s - h, s + wp + w, s
+ elif i == 3: # right
+ c = s + w0, s, s + w0 + w, s + h
+ elif i == 4: # bottom right
+ c = s + w0, s + hp, s + w0 + w, s + hp + h
+ elif i == 5: # bottom
+ c = s + w0 - w, s + h0, s + w0, s + h0 + h
+ elif i == 6: # bottom left
+ c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
+ elif i == 7: # left
+ c = s - w, s + h0 - h, s, s + h0
+ elif i == 8: # top left
+ c = s - w, s + h0 - hp - h, s, s + h0 - hp
+
+ padx, pady = c[:2]
+ x1, y1, x2, y2 = [max(x, 0) for x in c] # allocate coords
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
+ labels9.append(labels)
+ segments9.extend(segments)
+
+ # Image
+ img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
+ hp, wp = h, w # height, width previous
+
+ # Offset
+ yc, xc = [int(random.uniform(0, s)) for _ in self.mosaic_border] # mosaic center x, y
+ img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
+
+ # Concat/clip labels
+ labels9 = np.concatenate(labels9, 0)
+ labels9[:, [1, 3]] -= xc
+ labels9[:, [2, 4]] -= yc
+ c = np.array([xc, yc]) # centers
+ segments9 = [x - c for x in segments9]
+
+ for x in (labels9[:, 1:], *segments9):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img9, labels9 = replicate(img9, labels9) # replicate
+
+ # Augment
+ #img9, labels9, segments9 = remove_background(img9, labels9, segments9)
+ img9, labels9, segments9 = copy_paste(img9, labels9, segments9, probability=self.hyp['copy_paste'])
+ img9, labels9 = random_perspective(img9, labels9, segments9,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img9, labels9
+
+
+def load_samples(self, index):
+ # loads images in a 4-mosaic
+
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ #img4, labels4, segments4 = remove_background(img4, labels4, segments4)
+ sample_labels, sample_images, sample_masks = sample_segments(img4, labels4, segments4, probability=0.5)
+
+ return sample_labels, sample_images, sample_masks
+
+
+def copy_paste(img, labels, segments, probability=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ if probability and n:
+ h, w, c = img.shape # height, width, channels
+ im_new = np.zeros(img.shape, np.uint8)
+ for j in random.sample(range(n), k=round(probability * n)):
+ l, s = labels[j], segments[j]
+ box = w - l[3], l[2], w - l[1], l[4]
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
+ labels = np.concatenate((labels, [[l[0], *box]]), 0)
+ segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=img, src2=im_new)
+ result = cv2.flip(result, 1) # augment segments (flip left-right)
+ i = result > 0 # pixels to replace
+ # i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
+ img[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+
+ return img, labels, segments
+
+
+def remove_background(img, labels, segments):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ h, w, c = img.shape # height, width, channels
+ im_new = np.zeros(img.shape, np.uint8)
+ img_new = np.ones(img.shape, np.uint8) * 114
+ for j in range(n):
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=img, src2=im_new)
+
+ i = result > 0 # pixels to replace
+ img_new[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+
+ return img_new, labels, segments
+
+
+def sample_segments(img, labels, segments, probability=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ sample_labels = []
+ sample_images = []
+ sample_masks = []
+ if probability and n:
+ h, w, c = img.shape # height, width, channels
+ for j in random.sample(range(n), k=round(probability * n)):
+ l, s = labels[j], segments[j]
+ box = l[1].astype(int).clip(0,w-1), l[2].astype(int).clip(0,h-1), l[3].astype(int).clip(0,w-1), l[4].astype(int).clip(0,h-1)
+
+ #print(box)
+ if (box[2] <= box[0]) or (box[3] <= box[1]):
+ continue
+
+ sample_labels.append(l[0])
+
+ mask = np.zeros(img.shape, np.uint8)
+
+ cv2.drawContours(mask, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+ sample_masks.append(mask[box[1]:box[3],box[0]:box[2],:])
+
+ result = cv2.bitwise_and(src1=img, src2=mask)
+ i = result > 0 # pixels to replace
+ mask[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
+ #print(box)
+ sample_images.append(mask[box[1]:box[3],box[0]:box[2],:])
+
+ return sample_labels, sample_images, sample_masks
+
+
+def replicate(img, labels):
+ # Replicate labels
+ h, w = img.shape[:2]
+ boxes = labels[:, 1:].astype(int)
+ x1, y1, x2, y2 = boxes.T
+ s = ((x2 - x1) + (y2 - y1)) / 2 # side length (pixels)
+ for i in s.argsort()[:round(s.size * 0.5)]: # smallest indices
+ x1b, y1b, x2b, y2b = boxes[i]
+ bh, bw = y2b - y1b, x2b - x1b
+ yc, xc = int(random.uniform(0, h - bh)), int(random.uniform(0, w - bw)) # offset x, y
+ x1a, y1a, x2a, y2a = [xc, yc, xc + bw, yc + bh]
+ img[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ labels = np.append(labels, [[labels[i, 0], x1a, y1a, x2a, y2a]], axis=0)
+
+ return img, labels
+
+
+def letterbox(img, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
+ # Resize and pad image while meeting stride-multiple constraints
+ shape = img.shape[:2] # current shape [height, width]
+ if isinstance(new_shape, int):
+ new_shape = (new_shape, new_shape)
+
+ # Scale ratio (new / old)
+ r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
+ if not scaleup: # only scale down, do not scale up (for better test mAP)
+ r = min(r, 1.0)
+
+ # Compute padding
+ ratio = r, r # width, height ratios
+ new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
+ dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
+ if auto: # minimum rectangle
+ dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
+ elif scaleFill: # stretch
+ dw, dh = 0.0, 0.0
+ new_unpad = (new_shape[1], new_shape[0])
+ ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
+
+ dw /= 2 # divide padding into 2 sides
+ dh /= 2
+
+ if shape[::-1] != new_unpad: # resize
+ img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
+ top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
+ left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
+ img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
+ return img, ratio, (dw, dh)
+
+
+def random_perspective(img, targets=(), segments=(), degrees=10, translate=.1, scale=.1, shear=10, perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = img.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = img.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -img.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -img.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1.1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
+ T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ img = cv2.warpPerspective(img, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ img = cv2.warpAffine(img, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(img[:, :, ::-1]) # base
+ # ax[1].imshow(img2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ if n:
+ use_segments = any(x.any() for x in segments)
+ new = np.zeros((n, 4))
+ if use_segments: # warp segments
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+
+ else: # warp boxes
+ xy = np.ones((n * 4, 3))
+ xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
+
+ # create new boxes
+ x = xy[:, [0, 2, 4, 6]]
+ y = xy[:, [1, 3, 5, 7]]
+ new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
+
+ # clip
+ new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
+ new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+
+ return img, targets
+
+
+def box_candidates(box1, box2, wh_thr=2, ar_thr=20, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
+ # Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
+ w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
+ w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
+ ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
+ return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
+
+
+def bbox_ioa(box1, box2):
+ # Returns the intersection over box2 area given box1, box2. box1 is 4, box2 is nx4. boxes are x1y1x2y2
+ box2 = box2.transpose()
+
+ # Get the coordinates of bounding boxes
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+
+ # Intersection area
+ inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
+ (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)
+
+ # box2 area
+ box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + 1e-16
+
+ # Intersection over box2 area
+ return inter_area / box2_area
+
+
+def cutout(image, labels):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ h, w = image.shape[:2]
+
+ # create random masks
+ scales = [0.5] * 1 + [0.25] * 2 + [0.125] * 4 + [0.0625] * 8 + [0.03125] * 16 # image size fraction
+ for s in scales:
+ mask_h = random.randint(1, int(h * s))
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ # apply random color mask
+ image[ymin:ymax, xmin:xmax] = [random.randint(64, 191) for _ in range(3)]
+
+ # return unobscured labels
+ if len(labels) and s > 0.03:
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ labels = labels[ioa < 0.60] # remove >60% obscured labels
+
+ return labels
+
+
+def pastein(image, labels, sample_labels, sample_images, sample_masks):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ h, w = image.shape[:2]
+
+ # create random masks
+ scales = [0.75] * 2 + [0.5] * 4 + [0.25] * 4 + [0.125] * 4 + [0.0625] * 6 # image size fraction
+ for s in scales:
+ if random.random() < 0.2:
+ continue
+ mask_h = random.randint(1, int(h * s))
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ if len(labels):
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ else:
+ ioa = np.zeros(1)
+
+ if (ioa < 0.30).all() and len(sample_labels) and (xmax > xmin+20) and (ymax > ymin+20): # allow 30% obscuration of existing labels
+ sel_ind = random.randint(0, len(sample_labels)-1)
+ #print(len(sample_labels))
+ #print(sel_ind)
+ #print((xmax-xmin, ymax-ymin))
+ #print(image[ymin:ymax, xmin:xmax].shape)
+ #print([[sample_labels[sel_ind], *box]])
+ #print(labels.shape)
+ hs, ws, cs = sample_images[sel_ind].shape
+ r_scale = min((ymax-ymin)/hs, (xmax-xmin)/ws)
+ r_w = int(ws*r_scale)
+ r_h = int(hs*r_scale)
+
+ if (r_w > 10) and (r_h > 10):
+ r_mask = cv2.resize(sample_masks[sel_ind], (r_w, r_h))
+ r_image = cv2.resize(sample_images[sel_ind], (r_w, r_h))
+ temp_crop = image[ymin:ymin+r_h, xmin:xmin+r_w]
+ m_ind = r_mask > 0
+ if m_ind.astype(np.int).sum() > 60:
+ temp_crop[m_ind] = r_image[m_ind]
+ #print(sample_labels[sel_ind])
+ #print(sample_images[sel_ind].shape)
+ #print(temp_crop.shape)
+ box = np.array([xmin, ymin, xmin+r_w, ymin+r_h], dtype=np.float32)
+ if len(labels):
+ labels = np.concatenate((labels, [[sample_labels[sel_ind], *box]]), 0)
+ else:
+ labels = np.array([[sample_labels[sel_ind], *box]])
+
+ image[ymin:ymin+r_h, xmin:xmin+r_w] = temp_crop
+
+ return labels
+
+class Albumentations:
+ # YOLOv5 Albumentations class (optional, only used if package is installed)
+ def __init__(self):
+ self.transform = None
+ import albumentations as A
+
+ self.transform = A.Compose([
+ A.CLAHE(p=0.01),
+ A.RandomBrightnessContrast(brightness_limit=0.2, contrast_limit=0.2, p=0.01),
+ A.RandomGamma(gamma_limit=[80, 120], p=0.01),
+ A.Blur(p=0.01),
+ A.MedianBlur(p=0.01),
+ A.ToGray(p=0.01),
+ A.ImageCompression(quality_lower=75, p=0.01),],
+ bbox_params=A.BboxParams(format='pascal_voc', label_fields=['class_labels']))
+
+ #logging.info(colorstr('albumentations: ') + ', '.join(f'{x}' for x in self.transform.transforms if x.p))
+
+ def __call__(self, im, labels, p=1.0):
+ if self.transform and random.random() < p:
+ new = self.transform(image=im, bboxes=labels[:, 1:], class_labels=labels[:, 0]) # transformed
+ im, labels = new['image'], np.array([[c, *b] for c, b in zip(new['class_labels'], new['bboxes'])])
+ return im, labels
+
+
+def create_folder(path='./new'):
+ # Create folder
+ if os.path.exists(path):
+ shutil.rmtree(path) # delete output folder
+ os.makedirs(path) # make new output folder
+
+
+def flatten_recursive(path='../coco'):
+ # Flatten a recursive directory by bringing all files to top level
+ new_path = Path(path + '_flat')
+ create_folder(new_path)
+ for file in tqdm(glob.glob(str(Path(path)) + '/**/*.*', recursive=True)):
+ shutil.copyfile(file, new_path / Path(file).name)
+
+
+def extract_boxes(path='../coco/'): # from utils.datasets import *; extract_boxes('../coco128')
+ # Convert detection dataset into classification dataset, with one directory per class
+
+ path = Path(path) # images dir
+ shutil.rmtree(path / 'classifier') if (path / 'classifier').is_dir() else None # remove existing
+ files = list(path.rglob('*.*'))
+ n = len(files) # number of files
+ for im_file in tqdm(files, total=n):
+ if im_file.suffix[1:] in img_formats:
+ # image
+ im = cv2.imread(str(im_file))[..., ::-1] # BGR to RGB
+ h, w = im.shape[:2]
+
+ # labels
+ lb_file = Path(img2label_paths([str(im_file)])[0])
+ if Path(lb_file).exists():
+ with open(lb_file, 'r') as f:
+ lb = np.array([x.split() for x in f.read().strip().splitlines()], dtype=np.float32) # labels
+
+ for j, x in enumerate(lb):
+ c = int(x[0]) # class
+ f = (path / 'classifier') / f'{c}' / f'{path.stem}_{im_file.stem}_{j}.jpg' # new filename
+ if not f.parent.is_dir():
+ f.parent.mkdir(parents=True)
+
+ b = x[1:] * [w, h, w, h] # box
+ # b[2:] = b[2:].max() # rectangle to square
+ b[2:] = b[2:] * 1.2 + 3 # pad
+ b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
+
+ b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
+ b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
+ assert cv2.imwrite(str(f), im[b[1]:b[3], b[0]:b[2]]), f'box failure in {f}'
+
+
+def autosplit(path='../coco', weights=(0.9, 0.1, 0.0), annotated_only=False):
+ """ Autosplit a dataset into train/val/test splits and save path/autosplit_*.txt files
+ Usage: from utils.datasets import *; autosplit('../coco')
+ Arguments
+ path: Path to images directory
+ weights: Train, val, test weights (list)
+ annotated_only: Only use images with an annotated txt file
+ """
+ path = Path(path) # images dir
+ files = sum([list(path.rglob(f"*.{img_ext}")) for img_ext in img_formats], []) # image files only
+ n = len(files) # number of files
+ indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
+
+ txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
+ [(path / x).unlink() for x in txt if (path / x).exists()] # remove existing
+
+ print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
+ for i, img in tqdm(zip(indices, files), total=n):
+ if not annotated_only or Path(img2label_paths([str(img)])[0]).exists(): # check label
+ with open(path / txt[i], 'a') as f:
+ f.write(str(img) + '\n') # add image to txt file
+
+
+def load_segmentations(self, index):
+ key = '/work/handsomejw66/coco17/' + self.img_files[index]
+ #print(key)
+ # /work/handsomejw66/coco17/
+ return self.segs[key]
diff --git a/oneAPI_ODAV_APP/utils/general.py b/oneAPI_ODAV_APP/utils/general.py
new file mode 100644
index 000000000..cca7a97eb
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/general.py
@@ -0,0 +1,893 @@
+# YOLOR general utils
+
+import glob
+import logging
+import math
+import os
+import platform
+import random
+import re
+import subprocess
+import time
+from pathlib import Path
+
+import cv2
+import numpy as np
+import pandas as pd
+import torch
+import torchvision
+import yaml
+
+from utils.google_utils import gsutil_getsize
+from utils.metrics import fitness
+from utils.torch_utils import init_torch_seeds
+
+
+# Settings
+torch.set_printoptions(linewidth=320, precision=5, profile='long')
+np.set_printoptions(linewidth=320, formatter={'float_kind': '{:11.5g}'.format}) # format short g, %precision=5
+pd.options.display.max_columns = 10
+cv2.setNumThreads(0) # prevent OpenCV from multithreading (incompatible with PyTorch DataLoader)
+os.environ['NUMEXPR_MAX_THREADS'] = str(min(os.cpu_count(), 8)) # NumExpr max threads
+
+
+def set_logging(rank=-1):
+ logging.basicConfig(
+ format="%(message)s",
+ level=logging.INFO if rank in [-1, 0] else logging.WARN)
+
+
+def init_seeds(seed=0):
+ # Initialize random number generator (RNG) seeds
+ random.seed(seed)
+ np.random.seed(seed)
+ init_torch_seeds(seed)
+
+
+def get_latest_run(search_dir='.'):
+ # Return path to most recent 'last.pt' in /runs (i.e. to --resume from)
+ last_list = glob.glob(f'{search_dir}/**/last*.pt', recursive=True)
+ return max(last_list, key=os.path.getctime) if last_list else ''
+
+
+def isdocker():
+ # Is environment a Docker container
+ return Path('/workspace').exists() # or Path('/.dockerenv').exists()
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+def check_online():
+ # Check internet connectivity
+ import socket
+ try:
+ socket.create_connection(("1.1.1.1", 443), 5) # check host accesability
+ return True
+ except OSError:
+ return False
+
+
+def check_git_status():
+ # Recommend 'git pull' if code is out of date
+ print(colorstr('github: '), end='')
+ try:
+ assert Path('.git').exists(), 'skipping check (not a git repository)'
+ assert not isdocker(), 'skipping check (Docker image)'
+ assert check_online(), 'skipping check (offline)'
+
+ cmd = 'git fetch && git config --get remote.origin.url'
+ url = subprocess.check_output(cmd, shell=True).decode().strip().rstrip('.git') # github repo url
+ branch = subprocess.check_output('git rev-parse --abbrev-ref HEAD', shell=True).decode().strip() # checked out
+ n = int(subprocess.check_output(f'git rev-list {branch}..origin/master --count', shell=True)) # commits behind
+ if n > 0:
+ s = f"⚠️ WARNING: code is out of date by {n} commit{'s' * (n > 1)}. " \
+ f"Use 'git pull' to update or 'git clone {url}' to download latest."
+ else:
+ s = f'up to date with {url} ✅'
+ print(emojis(s)) # emoji-safe
+ except Exception as e:
+ print(e)
+
+
+def check_requirements(requirements='requirements.txt', exclude=()):
+ # Check installed dependencies meet requirements (pass *.txt file or list of packages)
+ import pkg_resources as pkg
+ prefix = colorstr('red', 'bold', 'requirements:')
+ if isinstance(requirements, (str, Path)): # requirements.txt file
+ file = Path(requirements)
+ if not file.exists():
+ print(f"{prefix} {file.resolve()} not found, check failed.")
+ return
+ requirements = [f'{x.name}{x.specifier}' for x in pkg.parse_requirements(file.open()) if x.name not in exclude]
+ else: # list or tuple of packages
+ requirements = [x for x in requirements if x not in exclude]
+
+ n = 0 # number of packages updates
+ for r in requirements:
+ try:
+ pkg.require(r)
+ except Exception as e: # DistributionNotFound or VersionConflict if requirements not met
+ n += 1
+ print(f"{prefix} {e.req} not found and is required by YOLOR, attempting auto-update...")
+ print(subprocess.check_output(f"pip install '{e.req}'", shell=True).decode())
+
+ if n: # if packages updated
+ source = file.resolve() if 'file' in locals() else requirements
+ s = f"{prefix} {n} package{'s' * (n > 1)} updated per {source}\n" \
+ f"{prefix} ⚠️ {colorstr('bold', 'Restart runtime or rerun command for updates to take effect')}\n"
+ print(emojis(s)) # emoji-safe
+
+
+def check_img_size(img_size, s=32):
+ # Verify img_size is a multiple of stride s
+ new_size = make_divisible(img_size, int(s)) # ceil gs-multiple
+ if new_size != img_size:
+ print('WARNING: --img-size %g must be multiple of max stride %g, updating to %g' % (img_size, s, new_size))
+ return new_size
+
+
+def check_imshow():
+ # Check if environment supports image displays
+ try:
+ assert not isdocker(), 'cv2.imshow() is disabled in Docker environments'
+ cv2.imshow('test', np.zeros((1, 1, 3)))
+ cv2.waitKey(1)
+ cv2.destroyAllWindows()
+ cv2.waitKey(1)
+ return True
+ except Exception as e:
+ print(f'WARNING: Environment does not support cv2.imshow() or PIL Image.show() image displays\n{e}')
+ return False
+
+
+def check_file(file):
+ # Search for file if not found
+ if Path(file).is_file() or file == '':
+ return file
+ else:
+ files = glob.glob('./**/' + file, recursive=True) # find file
+ assert len(files), f'File Not Found: {file}' # assert file was found
+ assert len(files) == 1, f"Multiple files match '{file}', specify exact path: {files}" # assert unique
+ return files[0] # return file
+
+
+def check_dataset(dict):
+ # Download dataset if not found locally
+ val, s = dict.get('val'), dict.get('download')
+ if val and len(val):
+ val = [Path(x).resolve() for x in (val if isinstance(val, list) else [val])] # val path
+ if not all(x.exists() for x in val):
+ print('\nWARNING: Dataset not found, nonexistent paths: %s' % [str(x) for x in val if not x.exists()])
+ if s and len(s): # download script
+ print('Downloading %s ...' % s)
+ if s.startswith('http') and s.endswith('.zip'): # URL
+ f = Path(s).name # filename
+ torch.hub.download_url_to_file(s, f)
+ r = os.system('unzip -q %s -d ../ && rm %s' % (f, f)) # unzip
+ else: # bash script
+ r = os.system(s)
+ print('Dataset autodownload %s\n' % ('success' if r == 0 else 'failure')) # analyze return value
+ else:
+ raise Exception('Dataset not found.')
+
+
+def make_divisible(x, divisor):
+ # Returns x evenly divisible by divisor
+ return math.ceil(x / divisor) * divisor
+
+
+def clean_str(s):
+ # Cleans a string by replacing special characters with underscore _
+ return re.sub(pattern="[|@#!¡·$€%&()=?¿^*;:,¨´><+]", repl="_", string=s)
+
+
+def one_cycle(y1=0.0, y2=1.0, steps=100):
+ # lambda function for sinusoidal ramp from y1 to y2
+ return lambda x: ((1 - math.cos(x * math.pi / steps)) / 2) * (y2 - y1) + y1
+
+
+def colorstr(*input):
+ # Colors a string https://en.wikipedia.org/wiki/ANSI_escape_code, i.e. colorstr('blue', 'hello world')
+ *args, string = input if len(input) > 1 else ('blue', 'bold', input[0]) # color arguments, string
+ colors = {'black': '\033[30m', # basic colors
+ 'red': '\033[31m',
+ 'green': '\033[32m',
+ 'yellow': '\033[33m',
+ 'blue': '\033[34m',
+ 'magenta': '\033[35m',
+ 'cyan': '\033[36m',
+ 'white': '\033[37m',
+ 'bright_black': '\033[90m', # bright colors
+ 'bright_red': '\033[91m',
+ 'bright_green': '\033[92m',
+ 'bright_yellow': '\033[93m',
+ 'bright_blue': '\033[94m',
+ 'bright_magenta': '\033[95m',
+ 'bright_cyan': '\033[96m',
+ 'bright_white': '\033[97m',
+ 'end': '\033[0m', # misc
+ 'bold': '\033[1m',
+ 'underline': '\033[4m'}
+ return ''.join(colors[x] for x in args) + f'{string}' + colors['end']
+
+
+def labels_to_class_weights(labels, nc=80):
+ # Get class weights (inverse frequency) from training labels
+ if labels[0] is None: # no labels loaded
+ return torch.Tensor()
+
+ labels = np.concatenate(labels, 0) # labels.shape = (866643, 5) for COCO
+ classes = labels[:, 0].astype(np.int) # labels = [class xywh]
+ weights = np.bincount(classes, minlength=nc) # occurrences per class
+
+ # Prepend gridpoint count (for uCE training)
+ # gpi = ((320 / 32 * np.array([1, 2, 4])) ** 2 * 3).sum() # gridpoints per image
+ # weights = np.hstack([gpi * len(labels) - weights.sum() * 9, weights * 9]) ** 0.5 # prepend gridpoints to start
+
+ weights[weights == 0] = 1 # replace empty bins with 1
+ weights = 1 / weights # number of targets per class
+ weights /= weights.sum() # normalize
+ return torch.from_numpy(weights)
+
+
+def labels_to_image_weights(labels, nc=80, class_weights=np.ones(80)):
+ # Produces image weights based on class_weights and image contents
+ class_counts = np.array([np.bincount(x[:, 0].astype(np.int), minlength=nc) for x in labels])
+ image_weights = (class_weights.reshape(1, nc) * class_counts).sum(1)
+ # index = random.choices(range(n), weights=image_weights, k=1) # weight image sample
+ return image_weights
+
+
+def coco80_to_coco91_class(): # converts 80-index (val2014) to 91-index (paper)
+ # https://tech.amikelive.com/node-718/what-object-categories-labels-are-in-coco-dataset/
+ # a = np.loadtxt('data/coco.names', dtype='str', delimiter='\n')
+ # b = np.loadtxt('data/coco_paper.names', dtype='str', delimiter='\n')
+ # x1 = [list(a[i] == b).index(True) + 1 for i in range(80)] # darknet to coco
+ # x2 = [list(b[i] == a).index(True) if any(b[i] == a) else None for i in range(91)] # coco to darknet
+ x = [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 27, 28, 31, 32, 33, 34,
+ 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63,
+ 64, 65, 67, 70, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 84, 85, 86, 87, 88, 89, 90]
+ return x
+
+
+def xyxy2xywh(x):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = (x[:, 0] + x[:, 2]) / 2 # x center
+ y[:, 1] = (x[:, 1] + x[:, 3]) / 2 # y center
+ y[:, 2] = x[:, 2] - x[:, 0] # width
+ y[:, 3] = x[:, 3] - x[:, 1] # height
+ return y
+
+
+def xywh2xyxy(x):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
+ y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
+ y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
+ y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
+ return y
+
+
+def xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):
+ # Convert nx4 boxes from [x, y, w, h] normalized to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * (x[:, 0] - x[:, 2] / 2) + padw # top left x
+ y[:, 1] = h * (x[:, 1] - x[:, 3] / 2) + padh # top left y
+ y[:, 2] = w * (x[:, 0] + x[:, 2] / 2) + padw # bottom right x
+ y[:, 3] = h * (x[:, 1] + x[:, 3] / 2) + padh # bottom right y
+ return y
+
+
+def xyn2xy(x, w=640, h=640, padw=0, padh=0):
+ # Convert normalized segments into pixel segments, shape (n,2)
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * x[:, 0] + padw # top left x
+ y[:, 1] = h * x[:, 1] + padh # top left y
+ return y
+
+
+def segment2box(segment, width=640, height=640):
+ # Convert 1 segment label to 1 box label, applying inside-image constraint, i.e. (xy1, xy2, ...) to (xyxy)
+ x, y = segment.T # segment xy
+ inside = (x >= 0) & (y >= 0) & (x <= width) & (y <= height)
+ x, y, = x[inside], y[inside]
+ return np.array([x.min(), y.min(), x.max(), y.max()]) if any(x) else np.zeros((1, 4)) # xyxy
+
+
+def segments2boxes(segments):
+ # Convert segment labels to box labels, i.e. (cls, xy1, xy2, ...) to (cls, xywh)
+ boxes = []
+ for s in segments:
+ x, y = s.T # segment xy
+ boxes.append([x.min(), y.min(), x.max(), y.max()]) # cls, xyxy
+ return xyxy2xywh(np.array(boxes)) # cls, xywh
+
+
+def resample_segments(segments, n=1000):
+ # Up-sample an (n,2) segment
+ for i, s in enumerate(segments):
+ s = np.concatenate((s, s[0:1, :]), axis=0)
+ x = np.linspace(0, len(s) - 1, n)
+ xp = np.arange(len(s))
+ segments[i] = np.concatenate([np.interp(x, xp, s[:, i]) for i in range(2)]).reshape(2, -1).T # segment xy
+ return segments
+
+
+def scale_coords(img1_shape, coords, img0_shape, ratio_pad=None):
+ # Rescale coords (xyxy) from img1_shape to img0_shape
+ if ratio_pad is None: # calculate from img0_shape
+ gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
+ pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
+ else:
+ gain = ratio_pad[0][0]
+ pad = ratio_pad[1]
+
+ coords[:, [0, 2]] -= pad[0] # x padding
+ coords[:, [1, 3]] -= pad[1] # y padding
+ coords[:, :4] /= gain
+ clip_coords(coords, img0_shape)
+ return coords
+
+
+def clip_coords(boxes, img_shape):
+ # Clip bounding xyxy bounding boxes to image shape (height, width)
+ boxes[:, 0].clamp_(0, img_shape[1]) # x1
+ boxes[:, 1].clamp_(0, img_shape[0]) # y1
+ boxes[:, 2].clamp_(0, img_shape[1]) # x2
+ boxes[:, 3].clamp_(0, img_shape[0]) # y2
+
+
+def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
+ box2 = box2.T
+
+ # Get the coordinates of bounding boxes
+ if x1y1x2y2: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ else: # transform from xywh to xyxy
+ b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
+ b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
+ b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
+ b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ iou = inter / union
+
+ if GIoU or DIoU or CIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
+ (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
+ if DIoU:
+ return iou - rho2 / c2 # DIoU
+ elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
+ with torch.no_grad():
+ alpha = v / (v - iou + (1 + eps))
+ return iou - (rho2 / c2 + v * alpha) # CIoU
+ else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ c_area = cw * ch + eps # convex area
+ return iou - (c_area - union) / c_area # GIoU
+ else:
+ return iou # IoU
+
+
+
+
+def bbox_alpha_iou(box1, box2, x1y1x2y2=False, GIoU=False, DIoU=False, CIoU=False, alpha=2, eps=1e-9):
+ # Returns tsqrt_he IoU of box1 to box2. box1 is 4, box2 is nx4
+ box2 = box2.T
+
+ # Get the coordinates of bounding boxes
+ if x1y1x2y2: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
+ else: # transform from xywh to xyxy
+ b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
+ b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
+ b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
+ b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ # change iou into pow(iou+eps)
+ # iou = inter / union
+ iou = torch.pow(inter/union + eps, alpha)
+ # beta = 2 * alpha
+ if GIoU or DIoU or CIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal
+ rho_x = torch.abs(b2_x1 + b2_x2 - b1_x1 - b1_x2)
+ rho_y = torch.abs(b2_y1 + b2_y2 - b1_y1 - b1_y2)
+ rho2 = ((rho_x ** 2 + rho_y ** 2) / 4) ** alpha # center distance
+ if DIoU:
+ return iou - rho2 / c2 # DIoU
+ elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
+ with torch.no_grad():
+ alpha_ciou = v / ((1 + eps) - inter / union + v)
+ # return iou - (rho2 / c2 + v * alpha_ciou) # CIoU
+ return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
+ else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ # c_area = cw * ch + eps # convex area
+ # return iou - (c_area - union) / c_area # GIoU
+ c_area = torch.max(cw * ch + eps, union) # convex area
+ return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU
+ else:
+ return iou # torch.log(iou+eps) or iou
+
+
+def box_iou(box1, box2):
+ # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ box1 (Tensor[N, 4])
+ box2 (Tensor[M, 4])
+ Returns:
+ iou (Tensor[N, M]): the NxM matrix containing the pairwise
+ IoU values for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ return inter / (area1[:, None] + area2 - inter) # iou = inter / (area1 + area2 - inter)
+
+
+def wh_iou(wh1, wh2):
+ # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
+ wh1 = wh1[:, None] # [N,1,2]
+ wh2 = wh2[None] # [1,M,2]
+ inter = torch.min(wh1, wh2).prod(2) # [N,M]
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter) # iou = inter / (area1 + area2 - inter)
+
+
+def box_giou(box1, box2):
+ """
+ Return generalized intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise generalized IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ areai = whi[:, :, 0] * whi[:, :, 1]
+
+ return iou - (areai - union) / areai
+
+
+def box_ciou(box1, box2, eps: float = 1e-7):
+ """
+ Return complete intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ eps (float, optional): small number to prevent division by zero. Default: 1e-7
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise complete IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ diagonal_distance_squared = (whi[:, :, 0] ** 2) + (whi[:, :, 1] ** 2) + eps
+
+ # centers of boxes
+ x_p = (box1[:, None, 0] + box1[:, None, 2]) / 2
+ y_p = (box1[:, None, 1] + box1[:, None, 3]) / 2
+ x_g = (box2[:, 0] + box2[:, 2]) / 2
+ y_g = (box2[:, 1] + box2[:, 3]) / 2
+ # The distance between boxes' centers squared.
+ centers_distance_squared = (x_p - x_g) ** 2 + (y_p - y_g) ** 2
+
+ w_pred = box1[:, None, 2] - box1[:, None, 0]
+ h_pred = box1[:, None, 3] - box1[:, None, 1]
+
+ w_gt = box2[:, 2] - box2[:, 0]
+ h_gt = box2[:, 3] - box2[:, 1]
+
+ v = (4 / (torch.pi ** 2)) * torch.pow((torch.atan(w_gt / h_gt) - torch.atan(w_pred / h_pred)), 2)
+ with torch.no_grad():
+ alpha = v / (1 - iou + v + eps)
+ return iou - (centers_distance_squared / diagonal_distance_squared) - alpha * v
+
+
+def box_diou(box1, box2, eps: float = 1e-7):
+ """
+ Return distance intersection-over-union (Jaccard index) between two sets of boxes.
+ Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
+ ``0 <= x1 < x2`` and ``0 <= y1 < y2``.
+ Args:
+ boxes1 (Tensor[N, 4]): first set of boxes
+ boxes2 (Tensor[M, 4]): second set of boxes
+ eps (float, optional): small number to prevent division by zero. Default: 1e-7
+ Returns:
+ Tensor[N, M]: the NxM matrix containing the pairwise distance IoU values
+ for every element in boxes1 and boxes2
+ """
+
+ def box_area(box):
+ # box = 4xn
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+ area1 = box_area(box1.T)
+ area2 = box_area(box2.T)
+
+ inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
+ union = (area1[:, None] + area2 - inter)
+
+ iou = inter / union
+
+ lti = torch.min(box1[:, None, :2], box2[:, :2])
+ rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
+
+ whi = (rbi - lti).clamp(min=0) # [N,M,2]
+ diagonal_distance_squared = (whi[:, :, 0] ** 2) + (whi[:, :, 1] ** 2) + eps
+
+ # centers of boxes
+ x_p = (box1[:, None, 0] + box1[:, None, 2]) / 2
+ y_p = (box1[:, None, 1] + box1[:, None, 3]) / 2
+ x_g = (box2[:, 0] + box2[:, 2]) / 2
+ y_g = (box2[:, 1] + box2[:, 3]) / 2
+ # The distance between boxes' centers squared.
+ centers_distance_squared = (x_p - x_g) ** 2 + (y_p - y_g) ** 2
+
+ # The distance IoU is the IoU penalized by a normalized
+ # distance between boxes' centers squared.
+ return iou - (centers_distance_squared / diagonal_distance_squared)
+
+
+def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
+ labels=()):
+ """Runs Non-Maximum Suppression (NMS) on inference results
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+
+ nc = prediction.shape[2] - 5 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Settings
+ min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
+ max_det = 300 # maximum number of detections per image
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 10.0 # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0, 6), device=prediction.device)] * prediction.shape[0]
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ l = labels[xi]
+ v = torch.zeros((len(l), nc + 5), device=x.device)
+ v[:, :4] = l[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ if nc == 1:
+ x[:, 5:] = x[:, 4:5] # for models with one class, cls_loss is 0 and cls_conf is always 0.5,
+ # so there is no need to multiplicate.
+ else:
+ x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ print(f'WARNING: NMS time limit {time_limit}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def non_max_suppression_kpt(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
+ labels=(), kpt_label=False, nc=None, nkpt=None):
+ """Runs Non-Maximum Suppression (NMS) on inference results
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+ if nc is None:
+ nc = prediction.shape[2] - 5 if not kpt_label else prediction.shape[2] - 56 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Settings
+ min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
+ max_det = 300 # maximum number of detections per image
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 10.0 # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0,6), device=prediction.device)] * prediction.shape[0]
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ l = labels[xi]
+ v = torch.zeros((len(l), nc + 5), device=x.device)
+ v[:, :4] = l[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ x[:, 5:5+nc] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ if not kpt_label:
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+ else:
+ kpts = x[:, 6:]
+ conf, j = x[:, 5:6].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float(), kpts), 1)[conf.view(-1) > conf_thres]
+
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ print(f'WARNING: NMS time limit {time_limit}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def strip_optimizer(f='best.pt', s=''): # from utils.general import *; strip_optimizer()
+ # Strip optimizer from 'f' to finalize training, optionally save as 's'
+ x = torch.load(f, map_location=torch.device('cpu'))
+ if x.get('ema'):
+ x['model'] = x['ema'] # replace model with ema
+ for k in 'optimizer', 'training_results', 'wandb_id', 'ema', 'updates': # keys
+ x[k] = None
+ x['epoch'] = -1
+ x['model'].half() # to FP16
+ for p in x['model'].parameters():
+ p.requires_grad = False
+ torch.save(x, s or f)
+ mb = os.path.getsize(s or f) / 1E6 # filesize
+ print(f"Optimizer stripped from {f},{(' saved as %s,' % s) if s else ''} {mb:.1f}MB")
+
+
+def print_mutation(hyp, results, yaml_file='hyp_evolved.yaml', bucket=''):
+ # Print mutation results to evolve.txt (for use with train.py --evolve)
+ a = '%10s' * len(hyp) % tuple(hyp.keys()) # hyperparam keys
+ b = '%10.3g' * len(hyp) % tuple(hyp.values()) # hyperparam values
+ c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
+ print('\n%s\n%s\nEvolved fitness: %s\n' % (a, b, c))
+
+ if bucket:
+ url = 'gs://%s/evolve.txt' % bucket
+ if gsutil_getsize(url) > (os.path.getsize('evolve.txt') if os.path.exists('evolve.txt') else 0):
+ os.system('gsutil cp %s .' % url) # download evolve.txt if larger than local
+
+ with open('evolve.txt', 'a') as f: # append result
+ f.write(c + b + '\n')
+ x = np.unique(np.loadtxt('evolve.txt', ndmin=2), axis=0) # load unique rows
+ x = x[np.argsort(-fitness(x))] # sort
+ np.savetxt('evolve.txt', x, '%10.3g') # save sort by fitness
+
+ # Save yaml
+ for i, k in enumerate(hyp.keys()):
+ hyp[k] = float(x[0, i + 7])
+ with open(yaml_file, 'w') as f:
+ results = tuple(x[0, :7])
+ c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
+ f.write('# Hyperparameter Evolution Results\n# Generations: %g\n# Metrics: ' % len(x) + c + '\n\n')
+ yaml.dump(hyp, f, sort_keys=False)
+
+ if bucket:
+ os.system('gsutil cp evolve.txt %s gs://%s' % (yaml_file, bucket)) # upload
+
+
+def apply_classifier(x, model, img, im0):
+ # applies a second stage classifier to yolo outputs
+ im0 = [im0] if isinstance(im0, np.ndarray) else im0
+ for i, d in enumerate(x): # per image
+ if d is not None and len(d):
+ d = d.clone()
+
+ # Reshape and pad cutouts
+ b = xyxy2xywh(d[:, :4]) # boxes
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # rectangle to square
+ b[:, 2:] = b[:, 2:] * 1.3 + 30 # pad
+ d[:, :4] = xywh2xyxy(b).long()
+
+ # Rescale boxes from img_size to im0 size
+ scale_coords(img.shape[2:], d[:, :4], im0[i].shape)
+
+ # Classes
+ pred_cls1 = d[:, 5].long()
+ ims = []
+ for j, a in enumerate(d): # per item
+ cutout = im0[i][int(a[1]):int(a[3]), int(a[0]):int(a[2])]
+ im = cv2.resize(cutout, (224, 224)) # BGR
+ # cv2.imwrite('test%i.jpg' % j, cutout)
+
+ im = im[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ im = np.ascontiguousarray(im, dtype=np.float32) # uint8 to float32
+ im /= 255.0 # 0 - 255 to 0.0 - 1.0
+ ims.append(im)
+
+ pred_cls2 = model(torch.Tensor(ims).to(d.device)).argmax(1) # classifier prediction
+ x[i] = x[i][pred_cls1 == pred_cls2] # retain matching class detections
+
+ return x
+
+
+def increment_path(path, exist_ok=True, sep=''):
+ # Increment path, i.e. runs/exp --> runs/exp{sep}0, runs/exp{sep}1 etc.
+ path = Path(path) # os-agnostic
+ if (path.exists() and exist_ok) or (not path.exists()):
+ return str(path)
+ else:
+ dirs = glob.glob(f"{path}{sep}*") # similar paths
+ matches = [re.search(rf"%s{sep}(\d+)" % path.stem, d) for d in dirs]
+ i = [int(m.groups()[0]) for m in matches if m] # indices
+ n = max(i) + 1 if i else 2 # increment number
+ return f"{path}{sep}{n}" # update path
diff --git a/oneAPI_ODAV_APP/utils/google_app_engine/Dockerfile b/oneAPI_ODAV_APP/utils/google_app_engine/Dockerfile
new file mode 100644
index 000000000..8d6040f26
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/google_app_engine/Dockerfile
@@ -0,0 +1,26 @@
+FROM gcr.io/google-appengine/python
+
+
+# Create a virtualenv for dependencies. This isolates these packages from
+# system-level packages.
+# Use -p python3 or -p python3.7 to select python version. Default is version 2.
+RUN virtualenv /env -p python3
+
+# Setting these environment variables are the same as running
+# source /env/bin/activate.
+ENV VIRTUAL_ENV /env
+ENV PATH /env/bin:$PATH
+
+RUN apt-get update && apt-get install -y python-opencv
+
+# Copy the application's requirements.txt and run pip to install all
+# dependencies into the virtualenv.
+ADD requirements.txt /app/requirements.txt
+RUN pip install -r /app/requirements.txt
+
+# Add the application source code.
+ADD . /app
+
+# Run a WSGI server to serve the application. gunicorn must be declared as
+# a dependency in requirements.txt.
+CMD gunicorn -b :$PORT main:app
diff --git a/oneAPI_ODAV_APP/utils/google_app_engine/additional_requirements.txt b/oneAPI_ODAV_APP/utils/google_app_engine/additional_requirements.txt
new file mode 100644
index 000000000..a40b65907
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/google_app_engine/additional_requirements.txt
@@ -0,0 +1,5 @@
+# add these requirements in your app on top of the existing ones
+pip==18.1
+Flask==1.0.2
+gunicorn==19.9.0
+
diff --git a/oneAPI_ODAV_APP/utils/google_app_engine/app.yaml b/oneAPI_ODAV_APP/utils/google_app_engine/app.yaml
new file mode 100644
index 000000000..61bfcdfe7
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/google_app_engine/app.yaml
@@ -0,0 +1,14 @@
+runtime: custom
+env: flex
+
+service: yolorapp
+
+liveness_check:
+ initial_delay_sec: 600
+
+manual_scaling:
+ instances: 1
+resources:
+ cpu: 1
+ memory_gb: 4
+ disk_size_gb: 20
diff --git a/oneAPI_ODAV_APP/utils/google_utils.py b/oneAPI_ODAV_APP/utils/google_utils.py
new file mode 100644
index 000000000..b2a818336
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/google_utils.py
@@ -0,0 +1,124 @@
+# Google utils: https://cloud.google.com/storage/docs/reference/libraries
+
+import os
+import platform
+import subprocess
+import time
+from pathlib import Path
+
+import requests
+import torch
+
+
+
+def gsutil_getsize(url=''):
+ # gs://bucket/file size https://cloud.google.com/storage/docs/gsutil/commands/du
+ s = subprocess.check_output(f'gsutil du {url}', shell=True).decode('utf-8')
+ return eval(s.split(' ')[0]) if len(s) else 0 # bytes
+
+
+def attempt_download(file, repo='WongKinYiu/yolov7'):
+ # Attempt file download if does not exist
+ file = Path(str(file).strip().replace("'", '').lower())
+
+ if not file.exists():
+ try:
+ response = requests.get(f'https://api.github.com/repos/{repo}/releases/latest').json() # github api
+ assets = [x['name'] for x in response['assets']] # release assets
+ tag = response['tag_name'] # i.e. 'v1.0'
+ except: # fallback plan
+ assets = ['yolov7.pt', 'yolov7-tiny.pt', 'yolov7x.pt', 'yolov7-d6.pt', 'yolov7-e6.pt',
+ 'yolov7-e6e.pt', 'yolov7-w6.pt']
+ tag = subprocess.check_output('git tag', shell=True).decode().split()[-1]
+
+ name = file.name
+ if name in assets:
+ msg = f'{file} missing, try downloading from https://github.com/{repo}/releases/'
+ redundant = False # second download option
+ try: # GitHub
+ url = f'https://github.com/{repo}/releases/download/{tag}/{name}'
+ print(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, file)
+ assert file.exists() and file.stat().st_size > 1E6 # check
+ except Exception as e: # GCP
+ print(f'Download error: {e}')
+ assert redundant, 'No secondary mirror'
+ url = f'https://storage.googleapis.com/{repo}/ckpt/{name}'
+ print(f'Downloading {url} to {file}...')
+ os.system(f'curl -L {url} -o {file}') # torch.hub.download_url_to_file(url, weights)
+ finally:
+ if not file.exists() or file.stat().st_size < 1E6: # check
+ file.unlink(missing_ok=True) # remove partial downloads
+ print(f'ERROR: Download failure: {msg}')
+ print('')
+ return
+
+
+def gdrive_download(id='', file='tmp.zip'):
+ # Downloads a file from Google Drive. from yolov7.utils.google_utils import *; gdrive_download()
+ t = time.time()
+ file = Path(file)
+ cookie = Path('cookie') # gdrive cookie
+ print(f'Downloading https://drive.google.com/uc?export=download&id={id} as {file}... ', end='')
+ file.unlink(missing_ok=True) # remove existing file
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Attempt file download
+ out = "NUL" if platform.system() == "Windows" else "/dev/null"
+ os.system(f'curl -c ./cookie -s -L "drive.google.com/uc?export=download&id={id}" > {out}')
+ if os.path.exists('cookie'): # large file
+ s = f'curl -Lb ./cookie "drive.google.com/uc?export=download&confirm={get_token()}&id={id}" -o {file}'
+ else: # small file
+ s = f'curl -s -L -o {file} "drive.google.com/uc?export=download&id={id}"'
+ r = os.system(s) # execute, capture return
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Error check
+ if r != 0:
+ file.unlink(missing_ok=True) # remove partial
+ print('Download error ') # raise Exception('Download error')
+ return r
+
+ # Unzip if archive
+ if file.suffix == '.zip':
+ print('unzipping... ', end='')
+ os.system(f'unzip -q {file}') # unzip
+ file.unlink() # remove zip to free space
+
+ print(f'Done ({time.time() - t:.1f}s)')
+ return r
+
+
+def get_token(cookie="./cookie"):
+ with open(cookie) as f:
+ for line in f:
+ if "download" in line:
+ return line.split()[-1]
+ return ""
+
+# def upload_blob(bucket_name, source_file_name, destination_blob_name):
+# # Uploads a file to a bucket
+# # https://cloud.google.com/storage/docs/uploading-objects#storage-upload-object-python
+#
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(destination_blob_name)
+#
+# blob.upload_from_filename(source_file_name)
+#
+# print('File {} uploaded to {}.'.format(
+# source_file_name,
+# destination_blob_name))
+#
+#
+# def download_blob(bucket_name, source_blob_name, destination_file_name):
+# # Uploads a blob from a bucket
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(source_blob_name)
+#
+# blob.download_to_filename(destination_file_name)
+#
+# print('Blob {} downloaded to {}.'.format(
+# source_blob_name,
+# destination_file_name))
diff --git a/oneAPI_ODAV_APP/utils/loss.py b/oneAPI_ODAV_APP/utils/loss.py
new file mode 100644
index 000000000..8468e3dbb
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/loss.py
@@ -0,0 +1,1698 @@
+# Loss functions
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+from utils.general import bbox_iou, bbox_alpha_iou, box_iou, box_giou, box_diou, box_ciou, xywh2xyxy
+from utils.torch_utils import is_parallel
+
+
+
+def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
+ # return positive, negative label smoothing BCE targets
+ return 1.0 - 0.5 * eps, 0.5 * eps
+
+
+class BCEBlurWithLogitsLoss(nn.Module):
+ # BCEwithLogitLoss() with reduced missing label effects.
+ def __init__(self, alpha=0.05):
+ super(BCEBlurWithLogitsLoss, self).__init__()
+ self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
+ self.alpha = alpha
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ pred = torch.sigmoid(pred) # prob from logits
+ dx = pred - true # reduce only missing label effects
+ # dx = (pred - true).abs() # reduce missing label and false label effects
+ alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
+ loss *= alpha_factor
+ return loss.mean()
+
+
+class SigmoidBin(nn.Module):
+ stride = None # strides computed during build
+ export = False # onnx export
+
+ def __init__(self, bin_count=10, min=0.0, max=1.0, reg_scale = 2.0, use_loss_regression=True, use_fw_regression=True, BCE_weight=1.0, smooth_eps=0.0):
+ super(SigmoidBin, self).__init__()
+
+ self.bin_count = bin_count
+ self.length = bin_count + 1
+ self.min = min
+ self.max = max
+ self.scale = float(max - min)
+ self.shift = self.scale / 2.0
+
+ self.use_loss_regression = use_loss_regression
+ self.use_fw_regression = use_fw_regression
+ self.reg_scale = reg_scale
+ self.BCE_weight = BCE_weight
+
+ start = min + (self.scale/2.0) / self.bin_count
+ end = max - (self.scale/2.0) / self.bin_count
+ step = self.scale / self.bin_count
+ self.step = step
+ #print(f" start = {start}, end = {end}, step = {step} ")
+
+ bins = torch.range(start, end + 0.0001, step).float()
+ self.register_buffer('bins', bins)
+
+
+ self.cp = 1.0 - 0.5 * smooth_eps
+ self.cn = 0.5 * smooth_eps
+
+ self.BCEbins = nn.BCEWithLogitsLoss(pos_weight=torch.Tensor([BCE_weight]))
+ self.MSELoss = nn.MSELoss()
+
+ def get_length(self):
+ return self.length
+
+ def forward(self, pred):
+ assert pred.shape[-1] == self.length, 'pred.shape[-1]=%d is not equal to self.length=%d' % (pred.shape[-1], self.length)
+
+ pred_reg = (pred[..., 0] * self.reg_scale - self.reg_scale/2.0) * self.step
+ pred_bin = pred[..., 1:(1+self.bin_count)]
+
+ _, bin_idx = torch.max(pred_bin, dim=-1)
+ bin_bias = self.bins[bin_idx]
+
+ if self.use_fw_regression:
+ result = pred_reg + bin_bias
+ else:
+ result = bin_bias
+ result = result.clamp(min=self.min, max=self.max)
+
+ return result
+
+
+ def training_loss(self, pred, target):
+ assert pred.shape[-1] == self.length, 'pred.shape[-1]=%d is not equal to self.length=%d' % (pred.shape[-1], self.length)
+ assert pred.shape[0] == target.shape[0], 'pred.shape=%d is not equal to the target.shape=%d' % (pred.shape[0], target.shape[0])
+ device = pred.device
+
+ pred_reg = (pred[..., 0].sigmoid() * self.reg_scale - self.reg_scale/2.0) * self.step
+ pred_bin = pred[..., 1:(1+self.bin_count)]
+
+ diff_bin_target = torch.abs(target[..., None] - self.bins)
+ _, bin_idx = torch.min(diff_bin_target, dim=-1)
+
+ bin_bias = self.bins[bin_idx]
+ bin_bias.requires_grad = False
+ result = pred_reg + bin_bias
+
+ target_bins = torch.full_like(pred_bin, self.cn, device=device) # targets
+ n = pred.shape[0]
+ target_bins[range(n), bin_idx] = self.cp
+
+ loss_bin = self.BCEbins(pred_bin, target_bins) # BCE
+
+ if self.use_loss_regression:
+ loss_regression = self.MSELoss(result, target) # MSE
+ loss = loss_bin + loss_regression
+ else:
+ loss = loss_bin
+
+ out_result = result.clamp(min=self.min, max=self.max)
+
+ return loss, out_result
+
+
+class FocalLoss(nn.Module):
+ # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(FocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ # p_t = torch.exp(-loss)
+ # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
+
+ # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = (1.0 - p_t) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class QFocalLoss(nn.Module):
+ # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super(QFocalLoss, self).__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = torch.abs(true - pred_prob) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+class RankSort(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, delta_RS=0.50, eps=1e-10):
+
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets > 0.)
+ fg_logits = logits[fg_labels]
+ fg_targets = targets[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta_RS
+ relevant_bg_labels=((targets==0) & (logits>=threshold_logit))
+
+ relevant_bg_logits = logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ sorting_error=torch.zeros(fg_num).cuda()
+ ranking_error=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ # Difference Transforms (x_ij)
+ fg_relations=fg_logits-fg_logits[ii]
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+
+ if delta_RS > 0:
+ fg_relations=torch.clamp(fg_relations/(2*delta_RS)+0.5,min=0,max=1)
+ bg_relations=torch.clamp(bg_relations/(2*delta_RS)+0.5,min=0,max=1)
+ else:
+ fg_relations = (fg_relations >= 0).float()
+ bg_relations = (bg_relations >= 0).float()
+
+ # Rank of ii among pos and false positive number (bg with larger scores)
+ rank_pos=torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+
+ # Rank of ii among all examples
+ rank=rank_pos+FP_num
+
+ # Ranking error of example ii. target_ranking_error is always 0. (Eq. 7)
+ ranking_error[ii]=FP_num/rank
+
+ # Current sorting error of example ii. (Eq. 7)
+ current_sorting_error = torch.sum(fg_relations*(1-fg_targets))/rank_pos
+
+ #Find examples in the target sorted order for example ii
+ iou_relations = (fg_targets >= fg_targets[ii])
+ target_sorted_order = iou_relations * fg_relations
+
+ #The rank of ii among positives in sorted order
+ rank_pos_target = torch.sum(target_sorted_order)
+
+ #Compute target sorting error. (Eq. 8)
+ #Since target ranking error is 0, this is also total target error
+ target_sorting_error= torch.sum(target_sorted_order*(1-fg_targets))/rank_pos_target
+
+ #Compute sorting error on example ii
+ sorting_error[ii] = current_sorting_error - target_sorting_error
+
+ #Identity Update for Ranking Error
+ if FP_num > eps:
+ #For ii the update is the ranking error
+ fg_grad[ii] -= ranking_error[ii]
+ #For negatives, distribute error via ranking pmf (i.e. bg_relations/FP_num)
+ relevant_bg_grad += (bg_relations*(ranking_error[ii]/FP_num))
+
+ #Find the positives that are misranked (the cause of the error)
+ #These are the ones with smaller IoU but larger logits
+ missorted_examples = (~ iou_relations) * fg_relations
+
+ #Denominotor of sorting pmf
+ sorting_pmf_denom = torch.sum(missorted_examples)
+
+ #Identity Update for Sorting Error
+ if sorting_pmf_denom > eps:
+ #For ii the update is the sorting error
+ fg_grad[ii] -= sorting_error[ii]
+ #For positives, distribute error via sorting pmf (i.e. missorted_examples/sorting_pmf_denom)
+ fg_grad += (missorted_examples*(sorting_error[ii]/sorting_pmf_denom))
+
+ #Normalize gradients by number of positives
+ classification_grads[fg_labels]= (fg_grad/fg_num)
+ classification_grads[relevant_bg_labels]= (relevant_bg_grad/fg_num)
+
+ ctx.save_for_backward(classification_grads)
+
+ return ranking_error.mean(), sorting_error.mean()
+
+ @staticmethod
+ def backward(ctx, out_grad1, out_grad2):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None, None
+
+class aLRPLoss(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, regression_losses, delta=1., eps=1e-5):
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets == 1)
+ fg_logits = logits[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta
+
+ #Get valid bg logits
+ relevant_bg_labels=((targets==0)&(logits>=threshold_logit))
+ relevant_bg_logits=logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ rank=torch.zeros(fg_num).cuda()
+ prec=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ max_prec=0
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ #x_ij s as score differences with fgs
+ fg_relations=fg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with fgs
+ fg_relations=torch.clamp(fg_relations/(2*delta)+0.5,min=0,max=1)
+ #Discard i=j in the summation in rank_pos
+ fg_relations[ii]=0
+
+ #x_ij s as score differences with bgs
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with bgs
+ bg_relations=torch.clamp(bg_relations/(2*delta)+0.5,min=0,max=1)
+
+ #Compute the rank of the example within fgs and number of bgs with larger scores
+ rank_pos=1+torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+ #Store the total since it is normalizer also for aLRP Regression error
+ rank[ii]=rank_pos+FP_num
+
+ #Compute precision for this example to compute classification loss
+ prec[ii]=rank_pos/rank[ii]
+ #For stability, set eps to a infinitesmall value (e.g. 1e-6), then compute grads
+ if FP_num > eps:
+ fg_grad[ii] = -(torch.sum(fg_relations*regression_losses)+FP_num)/rank[ii]
+ relevant_bg_grad += (bg_relations*(-fg_grad[ii]/FP_num))
+
+ #aLRP with grad formulation fg gradient
+ classification_grads[fg_labels]= fg_grad
+ #aLRP with grad formulation bg gradient
+ classification_grads[relevant_bg_labels]= relevant_bg_grad
+
+ classification_grads /= (fg_num)
+
+ cls_loss=1-prec.mean()
+ ctx.save_for_backward(classification_grads)
+
+ return cls_loss, rank, order
+
+ @staticmethod
+ def backward(ctx, out_grad1, out_grad2, out_grad3):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None, None, None
+
+
+class APLoss(torch.autograd.Function):
+ @staticmethod
+ def forward(ctx, logits, targets, delta=1.):
+ classification_grads=torch.zeros(logits.shape).cuda()
+
+ #Filter fg logits
+ fg_labels = (targets == 1)
+ fg_logits = logits[fg_labels]
+ fg_num = len(fg_logits)
+
+ #Do not use bg with scores less than minimum fg logit
+ #since changing its score does not have an effect on precision
+ threshold_logit = torch.min(fg_logits)-delta
+
+ #Get valid bg logits
+ relevant_bg_labels=((targets==0)&(logits>=threshold_logit))
+ relevant_bg_logits=logits[relevant_bg_labels]
+ relevant_bg_grad=torch.zeros(len(relevant_bg_logits)).cuda()
+ rank=torch.zeros(fg_num).cuda()
+ prec=torch.zeros(fg_num).cuda()
+ fg_grad=torch.zeros(fg_num).cuda()
+
+ max_prec=0
+ #sort the fg logits
+ order=torch.argsort(fg_logits)
+ #Loops over each positive following the order
+ for ii in order:
+ #x_ij s as score differences with fgs
+ fg_relations=fg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with fgs
+ fg_relations=torch.clamp(fg_relations/(2*delta)+0.5,min=0,max=1)
+ #Discard i=j in the summation in rank_pos
+ fg_relations[ii]=0
+
+ #x_ij s as score differences with bgs
+ bg_relations=relevant_bg_logits-fg_logits[ii]
+ #Apply piecewise linear function and determine relations with bgs
+ bg_relations=torch.clamp(bg_relations/(2*delta)+0.5,min=0,max=1)
+
+ #Compute the rank of the example within fgs and number of bgs with larger scores
+ rank_pos=1+torch.sum(fg_relations)
+ FP_num=torch.sum(bg_relations)
+ #Store the total since it is normalizer also for aLRP Regression error
+ rank[ii]=rank_pos+FP_num
+
+ #Compute precision for this example
+ current_prec=rank_pos/rank[ii]
+
+ #Compute interpolated AP and store gradients for relevant bg examples
+ if (max_prec<=current_prec):
+ max_prec=current_prec
+ relevant_bg_grad += (bg_relations/rank[ii])
+ else:
+ relevant_bg_grad += (bg_relations/rank[ii])*(((1-max_prec)/(1-current_prec)))
+
+ #Store fg gradients
+ fg_grad[ii]=-(1-max_prec)
+ prec[ii]=max_prec
+
+ #aLRP with grad formulation fg gradient
+ classification_grads[fg_labels]= fg_grad
+ #aLRP with grad formulation bg gradient
+ classification_grads[relevant_bg_labels]= relevant_bg_grad
+
+ classification_grads /= fg_num
+
+ cls_loss=1-prec.mean()
+ ctx.save_for_backward(classification_grads)
+
+ return cls_loss
+
+ @staticmethod
+ def backward(ctx, out_grad1):
+ g1, =ctx.saved_tensors
+ return g1*out_grad1, None, None
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLoss, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ #self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.1, .05]) # P3-P7
+ #self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.5, 0.4, .1]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), tcls[i]] = self.cp
+ #t[t==self.cp] = iou.detach().clamp(0).type(t.dtype)
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch = [], [], [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+
+ return tcls, tbox, indices, anch
+
+
+class ComputeLossOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p, targets, imgs)
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p]
+
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ #pxy = ps[:, :2].sigmoid() * 3. - 1.
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ #indices, anch = self.find_positive(p, targets)
+ indices, anch = self.find_3_positive(p, targets)
+ #indices, anch = self.find_4_positive(p, targets)
+ #indices, anch = self.find_5_positive(p, targets)
+ #indices, anch = self.find_9_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(10, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+
+class ComputeLossBinOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossBinOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+ #MSEangle = nn.MSELoss().to(device)
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride', 'bin_count':
+ setattr(self, k, getattr(det, k))
+
+ #xy_bin_sigmoid = SigmoidBin(bin_count=11, min=-0.5, max=1.5, use_loss_regression=False).to(device)
+ wh_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0, use_loss_regression=False).to(device)
+ #angle_bin_sigmoid = SigmoidBin(bin_count=31, min=-1.1, max=1.1, use_loss_regression=False).to(device)
+ self.wh_bin_sigmoid = wh_bin_sigmoid
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p, targets, imgs)
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p]
+
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+
+ obj_idx = self.wh_bin_sigmoid.get_length()*2 + 2 # x,y, w-bce, h-bce # xy_bin_sigmoid.get_length()*2
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+
+ #pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ ##pxy = ps[:, :2].sigmoid() * 3. - 1.
+ #pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ #pbox = torch.cat((pxy, pwh), 1) # predicted box
+
+ #x_loss, px = xy_bin_sigmoid.training_loss(ps[..., 0:12], tbox[i][..., 0])
+ #y_loss, py = xy_bin_sigmoid.training_loss(ps[..., 12:24], tbox[i][..., 1])
+ w_loss, pw = self.wh_bin_sigmoid.training_loss(ps[..., 2:(3+self.bin_count)], selected_tbox[..., 2] / anchors[i][..., 0])
+ h_loss, ph = self.wh_bin_sigmoid.training_loss(ps[..., (3+self.bin_count):obj_idx], selected_tbox[..., 3] / anchors[i][..., 1])
+
+ pw *= anchors[i][..., 0]
+ ph *= anchors[i][..., 1]
+
+ px = ps[:, 0].sigmoid() * 2. - 0.5
+ py = ps[:, 1].sigmoid() * 2. - 0.5
+
+ lbox += w_loss + h_loss # + x_loss + y_loss
+
+ #print(f"\n px = {px.shape}, py = {py.shape}, pw = {pw.shape}, ph = {ph.shape} \n")
+
+ pbox = torch.cat((px.unsqueeze(1), py.unsqueeze(1), pw.unsqueeze(1), ph.unsqueeze(1)), 1).to(device) # predicted box
+
+
+
+
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, (1+obj_idx):], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, (1+obj_idx):], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., obj_idx], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ #indices, anch = self.find_positive(p, targets)
+ indices, anch = self.find_3_positive(p, targets)
+ #indices, anch = self.find_4_positive(p, targets)
+ #indices, anch = self.find_5_positive(p, targets)
+ #indices, anch = self.find_9_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ obj_idx = self.wh_bin_sigmoid.get_length()*2 + 2
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, obj_idx:(obj_idx+1)])
+ p_cls.append(fg_pred[:, (obj_idx+1):])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pw = self.wh_bin_sigmoid.forward(fg_pred[..., 2:(3+self.bin_count)].sigmoid()) * anch[i][idx][:, 0] * self.stride[i]
+ ph = self.wh_bin_sigmoid.forward(fg_pred[..., (3+self.bin_count):obj_idx].sigmoid()) * anch[i][idx][:, 1] * self.stride[i]
+
+ pxywh = torch.cat([pxy, pw.unsqueeze(1), ph.unsqueeze(1)], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(10, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+
+class ComputeLossAuxOTA:
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ super(ComputeLossAuxOTA, self).__init__()
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
+ self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, model.gr, h, autobalance
+ for k in 'na', 'nc', 'nl', 'anchors', 'stride':
+ setattr(self, k, getattr(det, k))
+
+ def __call__(self, p, targets, imgs): # predictions, targets, model
+ device = targets.device
+ lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
+ bs_aux, as_aux_, gjs_aux, gis_aux, targets_aux, anchors_aux = self.build_targets2(p[:self.nl], targets, imgs)
+ bs, as_, gjs, gis, targets, anchors = self.build_targets(p[:self.nl], targets, imgs)
+ pre_gen_gains_aux = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p[:self.nl]]
+ pre_gen_gains = [torch.tensor(pp.shape, device=device)[[3, 2, 3, 2]] for pp in p[:self.nl]]
+
+
+ # Losses
+ for i in range(self.nl): # layer index, layer predictions
+ pi = p[i]
+ pi_aux = p[i+self.nl]
+ b, a, gj, gi = bs[i], as_[i], gjs[i], gis[i] # image, anchor, gridy, gridx
+ b_aux, a_aux, gj_aux, gi_aux = bs_aux[i], as_aux_[i], gjs_aux[i], gis_aux[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
+ tobj_aux = torch.zeros_like(pi_aux[..., 0], device=device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
+
+ # Regression
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = ps[:, :2].sigmoid() * 2. - 0.5
+ pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ selected_tbox = targets[i][:, 2:6] * pre_gen_gains[i]
+ selected_tbox[:, :2] -= grid
+ iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
+
+ # Classification
+ selected_tcls = targets[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
+ t[range(n), selected_tcls] = self.cp
+ lcls += self.BCEcls(ps[:, 5:], t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ n_aux = b_aux.shape[0] # number of targets
+ if n_aux:
+ ps_aux = pi_aux[b_aux, a_aux, gj_aux, gi_aux] # prediction subset corresponding to targets
+ grid_aux = torch.stack([gi_aux, gj_aux], dim=1)
+ pxy_aux = ps_aux[:, :2].sigmoid() * 2. - 0.5
+ #pxy_aux = ps_aux[:, :2].sigmoid() * 3. - 1.
+ pwh_aux = (ps_aux[:, 2:4].sigmoid() * 2) ** 2 * anchors_aux[i]
+ pbox_aux = torch.cat((pxy_aux, pwh_aux), 1) # predicted box
+ selected_tbox_aux = targets_aux[i][:, 2:6] * pre_gen_gains_aux[i]
+ selected_tbox_aux[:, :2] -= grid_aux
+ iou_aux = bbox_iou(pbox_aux.T, selected_tbox_aux, x1y1x2y2=False, CIoU=True) # iou(prediction, target)
+ lbox += 0.25 * (1.0 - iou_aux).mean() # iou loss
+
+ # Objectness
+ tobj_aux[b_aux, a_aux, gj_aux, gi_aux] = (1.0 - self.gr) + self.gr * iou_aux.detach().clamp(0).type(tobj_aux.dtype) # iou ratio
+
+ # Classification
+ selected_tcls_aux = targets_aux[i][:, 1].long()
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t_aux = torch.full_like(ps_aux[:, 5:], self.cn, device=device) # targets
+ t_aux[range(n_aux), selected_tcls_aux] = self.cp
+ lcls += 0.25 * self.BCEcls(ps_aux[:, 5:], t_aux) # BCE
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ obji_aux = self.BCEobj(pi_aux[..., 4], tobj_aux)
+ lobj += obji * self.balance[i] + 0.25 * obji_aux * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ loss = lbox + lobj + lcls
+ return loss * bs, torch.cat((lbox, lobj, lcls, loss)).detach()
+
+ def build_targets(self, p, targets, imgs):
+
+ indices, anch = self.find_3_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(20, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def build_targets2(self, p, targets, imgs):
+
+ indices, anch = self.find_5_positive(p, targets)
+
+ matching_bs = [[] for pp in p]
+ matching_as = [[] for pp in p]
+ matching_gjs = [[] for pp in p]
+ matching_gis = [[] for pp in p]
+ matching_targets = [[] for pp in p]
+ matching_anchs = [[] for pp in p]
+
+ nl = len(p)
+
+ for batch_idx in range(p[0].shape[0]):
+
+ b_idx = targets[:, 0]==batch_idx
+ this_target = targets[b_idx]
+ if this_target.shape[0] == 0:
+ continue
+
+ txywh = this_target[:, 2:6] * imgs[batch_idx].shape[1]
+ txyxy = xywh2xyxy(txywh)
+
+ pxyxys = []
+ p_cls = []
+ p_obj = []
+ from_which_layer = []
+ all_b = []
+ all_a = []
+ all_gj = []
+ all_gi = []
+ all_anch = []
+
+ for i, pi in enumerate(p):
+
+ b, a, gj, gi = indices[i]
+ idx = (b == batch_idx)
+ b, a, gj, gi = b[idx], a[idx], gj[idx], gi[idx]
+ all_b.append(b)
+ all_a.append(a)
+ all_gj.append(gj)
+ all_gi.append(gi)
+ all_anch.append(anch[i][idx])
+ from_which_layer.append(torch.ones(size=(len(b),)) * i)
+
+ fg_pred = pi[b, a, gj, gi]
+ p_obj.append(fg_pred[:, 4:5])
+ p_cls.append(fg_pred[:, 5:])
+
+ grid = torch.stack([gi, gj], dim=1)
+ pxy = (fg_pred[:, :2].sigmoid() * 2. - 0.5 + grid) * self.stride[i] #/ 8.
+ #pxy = (fg_pred[:, :2].sigmoid() * 3. - 1. + grid) * self.stride[i]
+ pwh = (fg_pred[:, 2:4].sigmoid() * 2) ** 2 * anch[i][idx] * self.stride[i] #/ 8.
+ pxywh = torch.cat([pxy, pwh], dim=-1)
+ pxyxy = xywh2xyxy(pxywh)
+ pxyxys.append(pxyxy)
+
+ pxyxys = torch.cat(pxyxys, dim=0)
+ if pxyxys.shape[0] == 0:
+ continue
+ p_obj = torch.cat(p_obj, dim=0)
+ p_cls = torch.cat(p_cls, dim=0)
+ from_which_layer = torch.cat(from_which_layer, dim=0)
+ all_b = torch.cat(all_b, dim=0)
+ all_a = torch.cat(all_a, dim=0)
+ all_gj = torch.cat(all_gj, dim=0)
+ all_gi = torch.cat(all_gi, dim=0)
+ all_anch = torch.cat(all_anch, dim=0)
+
+ pair_wise_iou = box_iou(txyxy, pxyxys)
+
+ pair_wise_iou_loss = -torch.log(pair_wise_iou + 1e-8)
+
+ top_k, _ = torch.topk(pair_wise_iou, min(20, pair_wise_iou.shape[1]), dim=1)
+ dynamic_ks = torch.clamp(top_k.sum(1).int(), min=1)
+
+ gt_cls_per_image = (
+ F.one_hot(this_target[:, 1].to(torch.int64), self.nc)
+ .float()
+ .unsqueeze(1)
+ .repeat(1, pxyxys.shape[0], 1)
+ )
+
+ num_gt = this_target.shape[0]
+ cls_preds_ = (
+ p_cls.float().unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ * p_obj.unsqueeze(0).repeat(num_gt, 1, 1).sigmoid_()
+ )
+
+ y = cls_preds_.sqrt_()
+ pair_wise_cls_loss = F.binary_cross_entropy_with_logits(
+ torch.log(y/(1-y)) , gt_cls_per_image, reduction="none"
+ ).sum(-1)
+ del cls_preds_
+
+ cost = (
+ pair_wise_cls_loss
+ + 3.0 * pair_wise_iou_loss
+ )
+
+ matching_matrix = torch.zeros_like(cost)
+
+ for gt_idx in range(num_gt):
+ _, pos_idx = torch.topk(
+ cost[gt_idx], k=dynamic_ks[gt_idx].item(), largest=False
+ )
+ matching_matrix[gt_idx][pos_idx] = 1.0
+
+ del top_k, dynamic_ks
+ anchor_matching_gt = matching_matrix.sum(0)
+ if (anchor_matching_gt > 1).sum() > 0:
+ _, cost_argmin = torch.min(cost[:, anchor_matching_gt > 1], dim=0)
+ matching_matrix[:, anchor_matching_gt > 1] *= 0.0
+ matching_matrix[cost_argmin, anchor_matching_gt > 1] = 1.0
+ fg_mask_inboxes = matching_matrix.sum(0) > 0.0
+ matched_gt_inds = matching_matrix[:, fg_mask_inboxes].argmax(0)
+
+ from_which_layer = from_which_layer[fg_mask_inboxes]
+ all_b = all_b[fg_mask_inboxes]
+ all_a = all_a[fg_mask_inboxes]
+ all_gj = all_gj[fg_mask_inboxes]
+ all_gi = all_gi[fg_mask_inboxes]
+ all_anch = all_anch[fg_mask_inboxes]
+
+ this_target = this_target[matched_gt_inds]
+
+ for i in range(nl):
+ layer_idx = from_which_layer == i
+ matching_bs[i].append(all_b[layer_idx])
+ matching_as[i].append(all_a[layer_idx])
+ matching_gjs[i].append(all_gj[layer_idx])
+ matching_gis[i].append(all_gi[layer_idx])
+ matching_targets[i].append(this_target[layer_idx])
+ matching_anchs[i].append(all_anch[layer_idx])
+
+ for i in range(nl):
+ if matching_targets[i] != []:
+ matching_bs[i] = torch.cat(matching_bs[i], dim=0)
+ matching_as[i] = torch.cat(matching_as[i], dim=0)
+ matching_gjs[i] = torch.cat(matching_gjs[i], dim=0)
+ matching_gis[i] = torch.cat(matching_gis[i], dim=0)
+ matching_targets[i] = torch.cat(matching_targets[i], dim=0)
+ matching_anchs[i] = torch.cat(matching_anchs[i], dim=0)
+ else:
+ matching_bs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_as[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gjs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_gis[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_targets[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+ matching_anchs[i] = torch.tensor([], device='cuda:0', dtype=torch.int64)
+
+ return matching_bs, matching_as, matching_gjs, matching_gis, matching_targets, matching_anchs
+
+ def find_5_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 1.0 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
+
+ def find_3_positive(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ indices, anch = [], []
+ gain = torch.ones(7, device=targets.device).long() # normalized to gridspace gain
+ ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor([[0, 0],
+ [1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ], device=targets.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors = self.anchors[i]
+ gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain
+ if nt:
+ # Matches
+ r = t[:, :, 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1. < g) & (gxy > 1.)).T
+ l, m = ((gxi % 1. < g) & (gxi > 1.)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ b, c = t[:, :2].long().T # image, class
+ gxy = t[:, 2:4] # grid xy
+ gwh = t[:, 4:6] # grid wh
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid xy indices
+
+ # Append
+ a = t[:, 6].long() # anchor indices
+ indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
+ anch.append(anchors[a]) # anchors
+
+ return indices, anch
diff --git a/oneAPI_ODAV_APP/utils/metrics.py b/oneAPI_ODAV_APP/utils/metrics.py
new file mode 100644
index 000000000..180e33e3b
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/metrics.py
@@ -0,0 +1,228 @@
+# Model validation metrics
+
+from pathlib import Path
+
+import matplotlib.pyplot as plt
+import numpy as np
+import torch
+
+from . import general
+
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
+ return (x[:, :4] * w).sum(1)
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, v5_metric=False, plot=False, save_dir='.', names=()):
+ """ Compute the average precision, given the recall and precision curves.
+ Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
+ # Arguments
+ tp: True positives (nparray, nx1 or nx10).
+ conf: Objectness value from 0-1 (nparray).
+ pred_cls: Predicted object classes (nparray).
+ target_cls: True object classes (nparray).
+ plot: Plot precision-recall curve at mAP@0.5
+ save_dir: Plot save directory
+ # Returns
+ The average precision as computed in py-faster-rcnn.
+ """
+
+ # Sort by objectness
+ i = np.argsort(-conf)
+ tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
+
+ # Find unique classes
+ unique_classes = np.unique(target_cls)
+ nc = unique_classes.shape[0] # number of classes, number of detections
+
+ # Create Precision-Recall curve and compute AP for each class
+ px, py = np.linspace(0, 1, 1000), [] # for plotting
+ ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
+ for ci, c in enumerate(unique_classes):
+ i = pred_cls == c
+ n_l = (target_cls == c).sum() # number of labels
+ n_p = i.sum() # number of predictions
+
+ if n_p == 0 or n_l == 0:
+ continue
+ else:
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + 1e-16) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j], v5_metric=v5_metric)
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+
+ # Compute F1 (harmonic mean of precision and recall)
+ f1 = 2 * p * r / (p + r + 1e-16)
+ if plot:
+ plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
+
+ i = f1.mean(0).argmax() # max F1 index
+ return p[:, i], r[:, i], ap, f1[:, i], unique_classes.astype('int32')
+
+
+def compute_ap(recall, precision, v5_metric=False):
+ """ Compute the average precision, given the recall and precision curves
+ # Arguments
+ recall: The recall curve (list)
+ precision: The precision curve (list)
+ v5_metric: Assume maximum recall to be 1.0, as in YOLOv5, MMDetetion etc.
+ # Returns
+ Average precision, precision curve, recall curve
+ """
+
+ # Append sentinel values to beginning and end
+ if v5_metric: # New YOLOv5 metric, same as MMDetection and Detectron2 repositories
+ mrec = np.concatenate(([0.], recall, [1.0]))
+ else: # Old YOLOv5 metric, i.e. default YOLOv7 metric
+ mrec = np.concatenate(([0.], recall, [recall[-1] + 0.01]))
+ mpre = np.concatenate(([1.], precision, [0.]))
+
+ # Compute the precision envelope
+ mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
+
+ # Integrate area under curve
+ method = 'interp' # methods: 'continuous', 'interp'
+ if method == 'interp':
+ x = np.linspace(0, 1, 101) # 101-point interp (COCO)
+ ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
+ else: # 'continuous'
+ i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
+ ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
+
+ return ap, mpre, mrec
+
+
+class ConfusionMatrix:
+ # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
+ def __init__(self, nc, conf=0.25, iou_thres=0.45):
+ self.matrix = np.zeros((nc + 1, nc + 1))
+ self.nc = nc # number of classes
+ self.conf = conf
+ self.iou_thres = iou_thres
+
+ def process_batch(self, detections, labels):
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ None, updates confusion matrix accordingly
+ """
+ detections = detections[detections[:, 4] > self.conf]
+ gt_classes = labels[:, 0].int()
+ detection_classes = detections[:, 5].int()
+ iou = general.box_iou(labels[:, 1:], detections[:, :4])
+
+ x = torch.where(iou > self.iou_thres)
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ else:
+ matches = np.zeros((0, 3))
+
+ n = matches.shape[0] > 0
+ m0, m1, _ = matches.transpose().astype(np.int16)
+ for i, gc in enumerate(gt_classes):
+ j = m0 == i
+ if n and sum(j) == 1:
+ self.matrix[gc, detection_classes[m1[j]]] += 1 # correct
+ else:
+ self.matrix[self.nc, gc] += 1 # background FP
+
+ if n:
+ for i, dc in enumerate(detection_classes):
+ if not any(m1 == i):
+ self.matrix[dc, self.nc] += 1 # background FN
+
+ def matrix(self):
+ return self.matrix
+
+ def plot(self, save_dir='', names=()):
+ try:
+ import seaborn as sn
+
+ array = self.matrix / (self.matrix.sum(0).reshape(1, self.nc + 1) + 1E-6) # normalize
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig = plt.figure(figsize=(12, 9), tight_layout=True)
+ sn.set(font_scale=1.0 if self.nc < 50 else 0.8) # for label size
+ labels = (0 < len(names) < 99) and len(names) == self.nc # apply names to ticklabels
+ sn.heatmap(array, annot=self.nc < 30, annot_kws={"size": 8}, cmap='Blues', fmt='.2f', square=True,
+ xticklabels=names + ['background FP'] if labels else "auto",
+ yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
+ fig.axes[0].set_xlabel('True')
+ fig.axes[0].set_ylabel('Predicted')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ except Exception as e:
+ pass
+
+ def print(self):
+ for i in range(self.nc + 1):
+ print(' '.join(map(str, self.matrix[i])))
+
+
+# Plots ----------------------------------------------------------------------------------------------------------------
+
+def plot_pr_curve(px, py, ap, save_dir='pr_curve.png', names=()):
+ # Precision-recall curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+ py = np.stack(py, axis=1)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py.T):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)
+ else:
+ ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)
+
+ ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())
+ ax.set_xlabel('Recall')
+ ax.set_ylabel('Precision')
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
+
+
+def plot_mc_curve(px, py, save_dir='mc_curve.png', names=(), xlabel='Confidence', ylabel='Metric'):
+ # Metric-confidence curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)
+ else:
+ ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
+
+ y = py.mean(0)
+ ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
+ ax.set_xlabel(xlabel)
+ ax.set_ylabel(ylabel)
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ fig.savefig(Path(save_dir), dpi=250)
diff --git a/oneAPI_ODAV_APP/utils/plots.py b/oneAPI_ODAV_APP/utils/plots.py
new file mode 100644
index 000000000..0a1c5f311
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/plots.py
@@ -0,0 +1,490 @@
+# Plotting utils
+
+import glob
+import math
+import os
+import random
+from copy import copy
+from pathlib import Path
+
+import cv2
+import matplotlib
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import seaborn as sns
+import torch
+import yaml
+from PIL import Image, ImageDraw, ImageFont
+from scipy.signal import butter, filtfilt
+
+from utils.general import xywh2xyxy, xyxy2xywh
+from utils.metrics import fitness
+
+
+# Settings
+matplotlib.rc('font', **{'size': 11})
+matplotlib.use('Agg') # for writing to files only
+
+
+def color_list():
+ # Return first 10 plt colors as (r,g,b) https://stackoverflow.com/questions/51350872/python-from-color-name-to-rgb
+ def hex2rgb(h):
+ return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))
+
+ return [hex2rgb(h) for h in matplotlib.colors.TABLEAU_COLORS.values()] # or BASE_ (8), CSS4_ (148), XKCD_ (949)
+
+
+def hist2d(x, y, n=100):
+ # 2d histogram used in labels.png and evolve.png
+ xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
+ hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
+ xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
+ yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
+ return np.log(hist[xidx, yidx])
+
+
+def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
+ # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
+ def butter_lowpass(cutoff, fs, order):
+ nyq = 0.5 * fs
+ normal_cutoff = cutoff / nyq
+ return butter(order, normal_cutoff, btype='low', analog=False)
+
+ b, a = butter_lowpass(cutoff, fs, order=order)
+ return filtfilt(b, a, data) # forward-backward filter
+
+
+def plot_one_box(x, img, color=None, label=None, line_thickness=3):
+ # Plots one bounding box on image img
+ tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
+ color = color or [random.randint(0, 255) for _ in range(3)]
+ c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
+ cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
+ if label:
+ tf = max(tl - 1, 1) # font thickness
+ t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
+ c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
+ cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
+ cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
+
+
+def plot_one_box_PIL(box, img, color=None, label=None, line_thickness=None):
+ img = Image.fromarray(img)
+ draw = ImageDraw.Draw(img)
+ line_thickness = line_thickness or max(int(min(img.size) / 200), 2)
+ draw.rectangle(box, width=line_thickness, outline=tuple(color)) # plot
+ if label:
+ fontsize = max(round(max(img.size) / 40), 12)
+ font = ImageFont.truetype("Arial.ttf", fontsize)
+ txt_width, txt_height = font.getsize(label)
+ draw.rectangle([box[0], box[1] - txt_height + 4, box[0] + txt_width, box[1]], fill=tuple(color))
+ draw.text((box[0], box[1] - txt_height + 1), label, fill=(255, 255, 255), font=font)
+ return np.asarray(img)
+
+
+def plot_wh_methods(): # from utils.plots import *; plot_wh_methods()
+ # Compares the two methods for width-height anchor multiplication
+ # https://github.com/ultralytics/yolov3/issues/168
+ x = np.arange(-4.0, 4.0, .1)
+ ya = np.exp(x)
+ yb = torch.sigmoid(torch.from_numpy(x)).numpy() * 2
+
+ fig = plt.figure(figsize=(6, 3), tight_layout=True)
+ plt.plot(x, ya, '.-', label='YOLOv3')
+ plt.plot(x, yb ** 2, '.-', label='YOLOR ^2')
+ plt.plot(x, yb ** 1.6, '.-', label='YOLOR ^1.6')
+ plt.xlim(left=-4, right=4)
+ plt.ylim(bottom=0, top=6)
+ plt.xlabel('input')
+ plt.ylabel('output')
+ plt.grid()
+ plt.legend()
+ fig.savefig('comparison.png', dpi=200)
+
+
+def output_to_target(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ for *box, conf, cls in o.cpu().numpy():
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])
+ return np.array(targets)
+
+
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=640, max_subplots=16):
+ # Plot image grid with labels
+
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+
+ # un-normalise
+ if np.max(images[0]) <= 1:
+ images *= 255
+
+ tl = 3 # line thickness
+ tf = max(tl - 1, 1) # font thickness
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+
+ # Check if we should resize
+ scale_factor = max_size / max(h, w)
+ if scale_factor < 1:
+ h = math.ceil(scale_factor * h)
+ w = math.ceil(scale_factor * w)
+
+ colors = color_list() # list of colors
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, img in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+
+ block_x = int(w * (i // ns))
+ block_y = int(h * (i % ns))
+
+ img = img.transpose(1, 2, 0)
+ if scale_factor < 1:
+ img = cv2.resize(img, (w, h))
+
+ mosaic[block_y:block_y + h, block_x:block_x + w, :] = img
+ if len(targets) > 0:
+ image_targets = targets[targets[:, 0] == i]
+ boxes = xywh2xyxy(image_targets[:, 2:6]).T
+ classes = image_targets[:, 1].astype('int')
+ labels = image_targets.shape[1] == 6 # labels if no conf column
+ conf = None if labels else image_targets[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale_factor < 1: # absolute coords need scale if image scales
+ boxes *= scale_factor
+ boxes[[0, 2]] += block_x
+ boxes[[1, 3]] += block_y
+ for j, box in enumerate(boxes.T):
+ cls = int(classes[j])
+ color = colors[cls % len(colors)]
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = '%s' % cls if labels else '%s %.1f' % (cls, conf[j])
+ plot_one_box(box, mosaic, label=label, color=color, line_thickness=tl)
+
+ # Draw image filename labels
+ if paths:
+ label = Path(paths[i]).name[:40] # trim to 40 char
+ t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
+ cv2.putText(mosaic, label, (block_x + 5, block_y + t_size[1] + 5), 0, tl / 3, [220, 220, 220], thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ # Image border
+ cv2.rectangle(mosaic, (block_x, block_y), (block_x + w, block_y + h), (255, 255, 255), thickness=3)
+
+ if fname:
+ r = min(1280. / max(h, w) / ns, 1.0) # ratio to limit image size
+ mosaic = cv2.resize(mosaic, (int(ns * w * r), int(ns * h * r)), interpolation=cv2.INTER_AREA)
+ # cv2.imwrite(fname, cv2.cvtColor(mosaic, cv2.COLOR_BGR2RGB)) # cv2 save
+ Image.fromarray(mosaic).save(fname) # PIL save
+ return mosaic
+
+
+def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):
+ # Plot LR simulating training for full epochs
+ optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
+ y = []
+ for _ in range(epochs):
+ scheduler.step()
+ y.append(optimizer.param_groups[0]['lr'])
+ plt.plot(y, '.-', label='LR')
+ plt.xlabel('epoch')
+ plt.ylabel('LR')
+ plt.grid()
+ plt.xlim(0, epochs)
+ plt.ylim(0)
+ plt.savefig(Path(save_dir) / 'LR.png', dpi=200)
+ plt.close()
+
+
+def plot_test_txt(): # from utils.plots import *; plot_test()
+ # Plot test.txt histograms
+ x = np.loadtxt('test.txt', dtype=np.float32)
+ box = xyxy2xywh(x[:, :4])
+ cx, cy = box[:, 0], box[:, 1]
+
+ fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
+ ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
+ ax.set_aspect('equal')
+ plt.savefig('hist2d.png', dpi=300)
+
+ fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
+ ax[0].hist(cx, bins=600)
+ ax[1].hist(cy, bins=600)
+ plt.savefig('hist1d.png', dpi=200)
+
+
+def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
+ # Plot targets.txt histograms
+ x = np.loadtxt('targets.txt', dtype=np.float32).T
+ s = ['x targets', 'y targets', 'width targets', 'height targets']
+ fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(4):
+ ax[i].hist(x[i], bins=100, label='%.3g +/- %.3g' % (x[i].mean(), x[i].std()))
+ ax[i].legend()
+ ax[i].set_title(s[i])
+ plt.savefig('targets.jpg', dpi=200)
+
+
+def plot_study_txt(path='', x=None): # from utils.plots import *; plot_study_txt()
+ # Plot study.txt generated by test.py
+ fig, ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)
+ # ax = ax.ravel()
+
+ fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
+ # for f in [Path(path) / f'study_coco_{x}.txt' for x in ['yolor-p6', 'yolor-w6', 'yolor-e6', 'yolor-d6']]:
+ for f in sorted(Path(path).glob('study*.txt')):
+ y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
+ x = np.arange(y.shape[1]) if x is None else np.array(x)
+ s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_inference (ms/img)', 't_NMS (ms/img)', 't_total (ms/img)']
+ # for i in range(7):
+ # ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)
+ # ax[i].set_title(s[i])
+
+ j = y[3].argmax() + 1
+ ax2.plot(y[6, 1:j], y[3, 1:j] * 1E2, '.-', linewidth=2, markersize=8,
+ label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
+
+ ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
+ 'k.-', linewidth=2, markersize=8, alpha=.25, label='EfficientDet')
+
+ ax2.grid(alpha=0.2)
+ ax2.set_yticks(np.arange(20, 60, 5))
+ ax2.set_xlim(0, 57)
+ ax2.set_ylim(30, 55)
+ ax2.set_xlabel('GPU Speed (ms/img)')
+ ax2.set_ylabel('COCO AP val')
+ ax2.legend(loc='lower right')
+ plt.savefig(str(Path(path).name) + '.png', dpi=300)
+
+
+def plot_labels(labels, names=(), save_dir=Path(''), loggers=None):
+ # plot dataset labels
+ print('Plotting labels... ')
+ c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
+ nc = int(c.max() + 1) # number of classes
+ colors = color_list()
+ x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])
+
+ # seaborn correlogram
+ sns.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
+ plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)
+ plt.close()
+
+ # matplotlib labels
+ matplotlib.use('svg') # faster
+ ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
+ ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
+ ax[0].set_ylabel('instances')
+ if 0 < len(names) < 30:
+ ax[0].set_xticks(range(len(names)))
+ ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ else:
+ ax[0].set_xlabel('classes')
+ sns.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
+ sns.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)
+
+ # rectangles
+ labels[:, 1:3] = 0.5 # center
+ labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
+ img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
+ for cls, *box in labels[:1000]:
+ ImageDraw.Draw(img).rectangle(box, width=1, outline=colors[int(cls) % 10]) # plot
+ ax[1].imshow(img)
+ ax[1].axis('off')
+
+ for a in [0, 1, 2, 3]:
+ for s in ['top', 'right', 'left', 'bottom']:
+ ax[a].spines[s].set_visible(False)
+
+ plt.savefig(save_dir / 'labels.jpg', dpi=200)
+ matplotlib.use('Agg')
+ plt.close()
+
+ # loggers
+ for k, v in loggers.items() or {}:
+ if k == 'wandb' and v:
+ v.log({"Labels": [v.Image(str(x), caption=x.name) for x in save_dir.glob('*labels*.jpg')]}, commit=False)
+
+
+def plot_evolution(yaml_file='data/hyp.finetune.yaml'): # from utils.plots import *; plot_evolution()
+ # Plot hyperparameter evolution results in evolve.txt
+ with open(yaml_file) as f:
+ hyp = yaml.load(f, Loader=yaml.SafeLoader)
+ x = np.loadtxt('evolve.txt', ndmin=2)
+ f = fitness(x)
+ # weights = (f - f.min()) ** 2 # for weighted results
+ plt.figure(figsize=(10, 12), tight_layout=True)
+ matplotlib.rc('font', **{'size': 8})
+ for i, (k, v) in enumerate(hyp.items()):
+ y = x[:, i + 7]
+ # mu = (y * weights).sum() / weights.sum() # best weighted result
+ mu = y[f.argmax()] # best single result
+ plt.subplot(6, 5, i + 1)
+ plt.scatter(y, f, c=hist2d(y, f, 20), cmap='viridis', alpha=.8, edgecolors='none')
+ plt.plot(mu, f.max(), 'k+', markersize=15)
+ plt.title('%s = %.3g' % (k, mu), fontdict={'size': 9}) # limit to 40 characters
+ if i % 5 != 0:
+ plt.yticks([])
+ print('%15s: %.3g' % (k, mu))
+ plt.savefig('evolve.png', dpi=200)
+ print('\nPlot saved as evolve.png')
+
+
+def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
+ # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()
+ ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
+ s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']
+ files = list(Path(save_dir).glob('frames*.txt'))
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
+ n = results.shape[1] # number of rows
+ x = np.arange(start, min(stop, n) if stop else n)
+ results = results[:, x]
+ t = (results[0] - results[0].min()) # set t0=0s
+ results[0] = x
+ for i, a in enumerate(ax):
+ if i < len(results):
+ label = labels[fi] if len(labels) else f.stem.replace('frames_', '')
+ a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)
+ a.set_title(s[i])
+ a.set_xlabel('time (s)')
+ # if fi == len(files) - 1:
+ # a.set_ylim(bottom=0)
+ for side in ['top', 'right']:
+ a.spines[side].set_visible(False)
+ else:
+ a.remove()
+ except Exception as e:
+ print('Warning: Plotting error for %s; %s' % (f, e))
+
+ ax[1].legend()
+ plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
+
+
+def plot_results_overlay(start=0, stop=0): # from utils.plots import *; plot_results_overlay()
+ # Plot training 'results*.txt', overlaying train and val losses
+ s = ['train', 'train', 'train', 'Precision', 'mAP@0.5', 'val', 'val', 'val', 'Recall', 'mAP@0.5:0.95'] # legends
+ t = ['Box', 'Objectness', 'Classification', 'P-R', 'mAP-F1'] # titles
+ for f in sorted(glob.glob('results*.txt') + glob.glob('../../Downloads/results*.txt')):
+ results = np.loadtxt(f, usecols=[2, 3, 4, 8, 9, 12, 13, 14, 10, 11], ndmin=2).T
+ n = results.shape[1] # number of rows
+ x = range(start, min(stop, n) if stop else n)
+ fig, ax = plt.subplots(1, 5, figsize=(14, 3.5), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(5):
+ for j in [i, i + 5]:
+ y = results[j, x]
+ ax[i].plot(x, y, marker='.', label=s[j])
+ # y_smooth = butter_lowpass_filtfilt(y)
+ # ax[i].plot(x, np.gradient(y_smooth), marker='.', label=s[j])
+
+ ax[i].set_title(t[i])
+ ax[i].legend()
+ ax[i].set_ylabel(f) if i == 0 else None # add filename
+ fig.savefig(f.replace('.txt', '.png'), dpi=200)
+
+
+def plot_results(start=0, stop=0, bucket='', id=(), labels=(), save_dir=''):
+ # Plot training 'results*.txt'. from utils.plots import *; plot_results(save_dir='runs/train/exp')
+ fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
+ ax = ax.ravel()
+ s = ['Box', 'Objectness', 'Classification', 'Precision', 'Recall',
+ 'val Box', 'val Objectness', 'val Classification', 'mAP@0.5', 'mAP@0.5:0.95']
+ if bucket:
+ # files = ['https://storage.googleapis.com/%s/results%g.txt' % (bucket, x) for x in id]
+ files = ['results%g.txt' % x for x in id]
+ c = ('gsutil cp ' + '%s ' * len(files) + '.') % tuple('gs://%s/results%g.txt' % (bucket, x) for x in id)
+ os.system(c)
+ else:
+ files = list(Path(save_dir).glob('results*.txt'))
+ assert len(files), 'No results.txt files found in %s, nothing to plot.' % os.path.abspath(save_dir)
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, usecols=[2, 3, 4, 8, 9, 12, 13, 14, 10, 11], ndmin=2).T
+ n = results.shape[1] # number of rows
+ x = range(start, min(stop, n) if stop else n)
+ for i in range(10):
+ y = results[i, x]
+ if i in [0, 1, 2, 5, 6, 7]:
+ y[y == 0] = np.nan # don't show zero loss values
+ # y /= y[0] # normalize
+ label = labels[fi] if len(labels) else f.stem
+ ax[i].plot(x, y, marker='.', label=label, linewidth=2, markersize=8)
+ ax[i].set_title(s[i])
+ # if i in [5, 6, 7]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print('Warning: Plotting error for %s; %s' % (f, e))
+
+ ax[1].legend()
+ fig.savefig(Path(save_dir) / 'results.png', dpi=200)
+
+
+def output_to_keypoint(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ kpts = o[:,6:]
+ o = o[:,:6]
+ for index, (*box, conf, cls) in enumerate(o.detach().cpu().numpy()):
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf, *list(kpts.detach().cpu().numpy()[index])])
+ return np.array(targets)
+
+
+def plot_skeleton_kpts(im, kpts, steps, orig_shape=None):
+ #Plot the skeleton and keypointsfor coco datatset
+ palette = np.array([[255, 128, 0], [255, 153, 51], [255, 178, 102],
+ [230, 230, 0], [255, 153, 255], [153, 204, 255],
+ [255, 102, 255], [255, 51, 255], [102, 178, 255],
+ [51, 153, 255], [255, 153, 153], [255, 102, 102],
+ [255, 51, 51], [153, 255, 153], [102, 255, 102],
+ [51, 255, 51], [0, 255, 0], [0, 0, 255], [255, 0, 0],
+ [255, 255, 255]])
+
+ skeleton = [[16, 14], [14, 12], [17, 15], [15, 13], [12, 13], [6, 12],
+ [7, 13], [6, 7], [6, 8], [7, 9], [8, 10], [9, 11], [2, 3],
+ [1, 2], [1, 3], [2, 4], [3, 5], [4, 6], [5, 7]]
+
+ pose_limb_color = palette[[9, 9, 9, 9, 7, 7, 7, 0, 0, 0, 0, 0, 16, 16, 16, 16, 16, 16, 16]]
+ pose_kpt_color = palette[[16, 16, 16, 16, 16, 0, 0, 0, 0, 0, 0, 9, 9, 9, 9, 9, 9]]
+ radius = 5
+ num_kpts = len(kpts) // steps
+
+ for kid in range(num_kpts):
+ r, g, b = pose_kpt_color[kid]
+ x_coord, y_coord = kpts[steps * kid], kpts[steps * kid + 1]
+ if not (x_coord % 640 == 0 or y_coord % 640 == 0):
+ if steps == 3:
+ conf = kpts[steps * kid + 2]
+ if conf < 0.5:
+ continue
+ cv2.circle(im, (int(x_coord), int(y_coord)), radius, (int(r), int(g), int(b)), -1)
+
+ for sk_id, sk in enumerate(skeleton):
+ r, g, b = pose_limb_color[sk_id]
+ pos1 = (int(kpts[(sk[0]-1)*steps]), int(kpts[(sk[0]-1)*steps+1]))
+ pos2 = (int(kpts[(sk[1]-1)*steps]), int(kpts[(sk[1]-1)*steps+1]))
+ if steps == 3:
+ conf1 = kpts[(sk[0]-1)*steps+2]
+ conf2 = kpts[(sk[1]-1)*steps+2]
+ if conf1<0.5 or conf2<0.5:
+ continue
+ if pos1[0]%640 == 0 or pos1[1]%640==0 or pos1[0]<0 or pos1[1]<0:
+ continue
+ if pos2[0] % 640 == 0 or pos2[1] % 640 == 0 or pos2[0]<0 or pos2[1]<0:
+ continue
+ cv2.line(im, pos1, pos2, (int(r), int(g), int(b)), thickness=2)
diff --git a/oneAPI_ODAV_APP/utils/torch_utils.py b/oneAPI_ODAV_APP/utils/torch_utils.py
new file mode 100644
index 000000000..311884e43
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/torch_utils.py
@@ -0,0 +1,375 @@
+# YOLOR PyTorch utils
+
+import datetime
+import logging
+import math
+import os
+import platform
+import subprocess
+import time
+from contextlib import contextmanager
+from copy import deepcopy
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+import torch.nn as nn
+import torch.nn.functional as F
+import torchvision
+
+
+try:
+ import thop # for FLOPS computation
+except ImportError:
+ thop = None
+logger = logging.getLogger(__name__)
+
+
+@contextmanager
+def torch_distributed_zero_first(local_rank: int):
+ """
+ Decorator to make all processes in distributed training wait for each local_master to do something.
+ """
+ if local_rank not in [-1, 0]:
+ torch.distributed.barrier()
+ yield
+ if local_rank == 0:
+ torch.distributed.barrier()
+
+
+def init_torch_seeds(seed=0):
+ # Speed-reproducibility tradeoff https://pytorch.org/docs/stable/notes/randomness.html
+ torch.manual_seed(seed)
+ if seed == 0: # slower, more reproducible
+ cudnn.benchmark, cudnn.deterministic = False, True
+ else: # faster, less reproducible
+ cudnn.benchmark, cudnn.deterministic = True, False
+
+
+def date_modified(path=__file__):
+ # return human-readable file modification date, i.e. '2021-3-26'
+ t = datetime.datetime.fromtimestamp(Path(path).stat().st_mtime)
+ return f'{t.year}-{t.month}-{t.day}'
+
+
+def git_describe(path=Path(__file__).parent): # path must be a directory
+ # return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
+ s = f'git -C {path} describe --tags --long --always'
+ try:
+ return subprocess.check_output(s, shell=True, stderr=subprocess.STDOUT).decode()[:-1]
+ except subprocess.CalledProcessError as e:
+ return '' # not a git repository
+
+
+def select_device(device='', batch_size=None):
+ # device = 'cpu' or '0' or '0,1,2,3'
+ s = f'YOLOR 🚀 {git_describe() or date_modified()} torch {torch.__version__} ' # string
+ cpu = device.lower() == 'cpu'
+ if cpu:
+ os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
+ elif device: # non-cpu device requested
+ os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable
+ assert torch.cuda.is_available(), f'CUDA unavailable, invalid device {device} requested' # check availability
+
+ cuda = not cpu and torch.cuda.is_available()
+ if cuda:
+ n = torch.cuda.device_count()
+ if n > 1 and batch_size: # check that batch_size is compatible with device_count
+ assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
+ space = ' ' * len(s)
+ for i, d in enumerate(device.split(',') if device else range(n)):
+ p = torch.cuda.get_device_properties(i)
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / 1024 ** 2}MB)\n" # bytes to MB
+ else:
+ s += 'CPU\n'
+
+ logger.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe
+ return torch.device('cuda:0' if cuda else 'cpu')
+
+
+def time_synchronized():
+ # pytorch-accurate time
+ if torch.cuda.is_available():
+ torch.cuda.synchronize()
+ return time.time()
+
+
+def profile(x, ops, n=100, device=None):
+ # profile a pytorch module or list of modules. Example usage:
+ # x = torch.randn(16, 3, 640, 640) # input
+ # m1 = lambda x: x * torch.sigmoid(x)
+ # m2 = nn.SiLU()
+ # profile(x, [m1, m2], n=100) # profile speed over 100 iterations
+
+ device = device or torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
+ x = x.to(device)
+ x.requires_grad = True
+ print(torch.__version__, device.type, torch.cuda.get_device_properties(0) if device.type == 'cuda' else '')
+ print(f"\n{'Params':>12s}{'GFLOPS':>12s}{'forward (ms)':>16s}{'backward (ms)':>16s}{'input':>24s}{'output':>24s}")
+ for m in ops if isinstance(ops, list) else [ops]:
+ m = m.to(device) if hasattr(m, 'to') else m # device
+ m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m # type
+ dtf, dtb, t = 0., 0., [0., 0., 0.] # dt forward, backward
+ try:
+ flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPS
+ except:
+ flops = 0
+
+ for _ in range(n):
+ t[0] = time_synchronized()
+ y = m(x)
+ t[1] = time_synchronized()
+ try:
+ _ = y.sum().backward()
+ t[2] = time_synchronized()
+ except: # no backward method
+ t[2] = float('nan')
+ dtf += (t[1] - t[0]) * 1000 / n # ms per op forward
+ dtb += (t[2] - t[1]) * 1000 / n # ms per op backward
+
+ s_in = tuple(x.shape) if isinstance(x, torch.Tensor) else 'list'
+ s_out = tuple(y.shape) if isinstance(y, torch.Tensor) else 'list'
+ p = sum(list(x.numel() for x in m.parameters())) if isinstance(m, nn.Module) else 0 # parameters
+ print(f'{p:12}{flops:12.4g}{dtf:16.4g}{dtb:16.4g}{str(s_in):>24s}{str(s_out):>24s}')
+
+
+def is_parallel(model):
+ return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
+
+
+def intersect_dicts(da, db, exclude=()):
+ # Dictionary intersection of matching keys and shapes, omitting 'exclude' keys, using da values
+ return {k: v for k, v in da.items() if k in db and not any(x in k for x in exclude) and v.shape == db[k].shape}
+
+
+def initialize_weights(model):
+ for m in model.modules():
+ t = type(m)
+ if t is nn.Conv2d:
+ pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
+ elif t is nn.BatchNorm2d:
+ m.eps = 1e-3
+ m.momentum = 0.03
+ elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6]:
+ m.inplace = True
+
+
+def find_modules(model, mclass=nn.Conv2d):
+ # Finds layer indices matching module class 'mclass'
+ return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
+
+
+def sparsity(model):
+ # Return global model sparsity
+ a, b = 0., 0.
+ for p in model.parameters():
+ a += p.numel()
+ b += (p == 0).sum()
+ return b / a
+
+
+def prune(model, amount=0.3):
+ # Prune model to requested global sparsity
+ import torch.nn.utils.prune as prune
+ print('Pruning model... ', end='')
+ for name, m in model.named_modules():
+ if isinstance(m, nn.Conv2d):
+ prune.l1_unstructured(m, name='weight', amount=amount) # prune
+ prune.remove(m, 'weight') # make permanent
+ print(' %.3g global sparsity' % sparsity(model))
+
+
+def fuse_conv_and_bn(conv, bn):
+ # Fuse convolution and batchnorm layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
+ fusedconv = nn.Conv2d(conv.in_channels,
+ conv.out_channels,
+ kernel_size=conv.kernel_size,
+ stride=conv.stride,
+ padding=conv.padding,
+ groups=conv.groups,
+ bias=True).requires_grad_(False).to(conv.weight.device)
+
+ # prepare filters
+ w_conv = conv.weight.clone().view(conv.out_channels, -1)
+ w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
+ fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
+
+ # prepare spatial bias
+ b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
+ b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
+ fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
+
+ return fusedconv
+
+
+def model_info(model, verbose=False, img_size=640):
+ # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
+ n_p = sum(x.numel() for x in model.parameters()) # number parameters
+ n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
+ if verbose:
+ print('%5s %40s %9s %12s %20s %10s %10s' % ('layer', 'name', 'gradient', 'parameters', 'shape', 'mu', 'sigma'))
+ for i, (name, p) in enumerate(model.named_parameters()):
+ name = name.replace('module_list.', '')
+ print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
+ (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
+
+ try: # FLOPS
+ from thop import profile
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32
+ img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input
+ flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPS
+ img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float
+ fs = ', %.1f GFLOPS' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPS
+ except (ImportError, Exception):
+ fs = ''
+
+ logger.info(f"Model Summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
+
+
+def load_classifier(name='resnet101', n=2):
+ # Loads a pretrained model reshaped to n-class output
+ model = torchvision.models.__dict__[name](pretrained=True)
+
+ # ResNet model properties
+ # input_size = [3, 224, 224]
+ # input_space = 'RGB'
+ # input_range = [0, 1]
+ # mean = [0.485, 0.456, 0.406]
+ # std = [0.229, 0.224, 0.225]
+
+ # Reshape output to n classes
+ filters = model.fc.weight.shape[1]
+ model.fc.bias = nn.Parameter(torch.zeros(n), requires_grad=True)
+ model.fc.weight = nn.Parameter(torch.zeros(n, filters), requires_grad=True)
+ model.fc.out_features = n
+ return model
+
+
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # scales img(bs,3,y,x) by ratio constrained to gs-multiple
+ if ratio == 1.0:
+ return img
+ else:
+ h, w = img.shape[2:]
+ s = (int(h * ratio), int(w * ratio)) # new size
+ img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
+ if not same_shape: # pad/crop img
+ h, w = [math.ceil(x * ratio / gs) * gs for x in (h, w)]
+ return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
+
+
+def copy_attr(a, b, include=(), exclude=()):
+ # Copy attributes from b to a, options to only include [...] and to exclude [...]
+ for k, v in b.__dict__.items():
+ if (len(include) and k not in include) or k.startswith('_') or k in exclude:
+ continue
+ else:
+ setattr(a, k, v)
+
+
+class ModelEMA:
+ """ Model Exponential Moving Average from https://github.com/rwightman/pytorch-image-models
+ Keep a moving average of everything in the model state_dict (parameters and buffers).
+ This is intended to allow functionality like
+ https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
+ A smoothed version of the weights is necessary for some training schemes to perform well.
+ This class is sensitive where it is initialized in the sequence of model init,
+ GPU assignment and distributed training wrappers.
+ """
+
+ def __init__(self, model, decay=0.9999, updates=0):
+ # Create EMA
+ self.ema = deepcopy(model.module if is_parallel(model) else model).eval() # FP32 EMA
+ # if next(model.parameters()).device.type != 'cpu':
+ # self.ema.half() # FP16 EMA
+ self.updates = updates # number of EMA updates
+ self.decay = lambda x: decay * (1 - math.exp(-x / 2000)) # decay exponential ramp (to help early epochs)
+ for p in self.ema.parameters():
+ p.requires_grad_(False)
+
+ def update(self, model):
+ # Update EMA parameters
+ with torch.no_grad():
+ self.updates += 1
+ d = self.decay(self.updates)
+
+ msd = model.module.state_dict() if is_parallel(model) else model.state_dict() # model state_dict
+ for k, v in self.ema.state_dict().items():
+ if v.dtype.is_floating_point:
+ v *= d
+ v += (1. - d) * msd[k].detach()
+
+ def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
+ # Update EMA attributes
+ copy_attr(self.ema, model, include, exclude)
+
+
+class BatchNormXd(torch.nn.modules.batchnorm._BatchNorm):
+ def _check_input_dim(self, input):
+ # The only difference between BatchNorm1d, BatchNorm2d, BatchNorm3d, etc
+ # is this method that is overwritten by the sub-class
+ # This original goal of this method was for tensor sanity checks
+ # If you're ok bypassing those sanity checks (eg. if you trust your inference
+ # to provide the right dimensional inputs), then you can just use this method
+ # for easy conversion from SyncBatchNorm
+ # (unfortunately, SyncBatchNorm does not store the original class - if it did
+ # we could return the one that was originally created)
+ return
+
+def revert_sync_batchnorm(module):
+ # this is very similar to the function that it is trying to revert:
+ # https://github.com/pytorch/pytorch/blob/c8b3686a3e4ba63dc59e5dcfe5db3430df256833/torch/nn/modules/batchnorm.py#L679
+ module_output = module
+ if isinstance(module, torch.nn.modules.batchnorm.SyncBatchNorm):
+ new_cls = BatchNormXd
+ module_output = BatchNormXd(module.num_features,
+ module.eps, module.momentum,
+ module.affine,
+ module.track_running_stats)
+ if module.affine:
+ with torch.no_grad():
+ module_output.weight = module.weight
+ module_output.bias = module.bias
+ module_output.running_mean = module.running_mean
+ module_output.running_var = module.running_var
+ module_output.num_batches_tracked = module.num_batches_tracked
+ if hasattr(module, "qconfig"):
+ module_output.qconfig = module.qconfig
+ for name, child in module.named_children():
+ module_output.add_module(name, revert_sync_batchnorm(child))
+ del module
+ return module_output
+
+
+class TracedModel(nn.Module):
+
+ def __init__(self, model=None, device=None, img_size=(640,640)):
+ super(TracedModel, self).__init__()
+
+ print(" Convert model to Traced-model... ")
+ self.stride = model.stride
+ self.names = model.names
+ self.model = model
+
+ self.model = revert_sync_batchnorm(self.model)
+ self.model.to('cpu')
+ self.model.eval()
+
+ self.detect_layer = self.model.model[-1]
+ self.model.traced = True
+
+ rand_example = torch.rand(1, 3, img_size, img_size)
+
+ traced_script_module = torch.jit.trace(self.model, rand_example, strict=False)
+ #traced_script_module = torch.jit.script(self.model)
+ traced_script_module.save("traced_model.pt")
+ print(" traced_script_module saved! ")
+ self.model = traced_script_module
+ self.model.to(device)
+ self.detect_layer.to(device)
+ print(" model is traced! \n")
+
+ def forward(self, x, augment=False, profile=False):
+ out = self.model(x)
+ out = self.detect_layer(out)
+ return out
\ No newline at end of file
diff --git a/oneAPI_ODAV_APP/utils/wandb_logging/__init__.py b/oneAPI_ODAV_APP/utils/wandb_logging/__init__.py
new file mode 100644
index 000000000..a6131c10e
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/wandb_logging/__init__.py
@@ -0,0 +1 @@
+# init
diff --git a/oneAPI_ODAV_APP/utils/wandb_logging/log_dataset.py b/oneAPI_ODAV_APP/utils/wandb_logging/log_dataset.py
new file mode 100644
index 000000000..600598f3e
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/wandb_logging/log_dataset.py
@@ -0,0 +1,25 @@
+import argparse
+
+import yaml
+
+
+from wandb_utils import WandbLogger
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ with open(opt.data) as f:
+ data = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ logger = WandbLogger(opt, '', None, data, job_type='Dataset Creation')
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOR', help='name of W&B Project')
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/oneAPI_ODAV_APP/utils/wandb_logging/wandb_utils.py b/oneAPI_ODAV_APP/utils/wandb_logging/wandb_utils.py
new file mode 100644
index 000000000..22eb58533
--- /dev/null
+++ b/oneAPI_ODAV_APP/utils/wandb_logging/wandb_utils.py
@@ -0,0 +1,307 @@
+import json
+import sys
+from pathlib import Path
+
+
+import torch
+import yaml
+from tqdm import tqdm
+
+sys.path.append(str(Path(__file__).parent.parent.parent)) # add utils/ to path
+from utils.datasets import LoadImagesAndLabels
+from utils.datasets import img2label_paths
+from utils.general import colorstr, xywh2xyxy, check_dataset
+
+try:
+ import wandb
+ from wandb import init, finish
+except ImportError:
+ wandb = None
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):
+ return from_string[len(prefix):]
+
+
+def check_wandb_config_file(data_config_file):
+ wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path
+ if Path(wandb_config).is_file():
+ return wandb_config
+ return data_config_file
+
+
+def get_run_info(run_path):
+ run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))
+ run_id = run_path.stem
+ project = run_path.parent.stem
+ model_artifact_name = 'run_' + run_id + '_model'
+ return run_id, project, model_artifact_name
+
+
+def check_wandb_resume(opt):
+ process_wandb_config_ddp_mode(opt) if opt.global_rank not in [-1, 0] else None
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ if opt.global_rank not in [-1, 0]: # For resuming DDP runs
+ run_id, project, model_artifact_name = get_run_info(opt.resume)
+ api = wandb.Api()
+ artifact = api.artifact(project + '/' + model_artifact_name + ':latest')
+ modeldir = artifact.download()
+ opt.weights = str(Path(modeldir) / "last.pt")
+ return True
+ return None
+
+
+def process_wandb_config_ddp_mode(opt):
+ with open(opt.data) as f:
+ data_dict = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ train_dir, val_dir = None, None
+ if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)
+ train_dir = train_artifact.download()
+ train_path = Path(train_dir) / 'data/images/'
+ data_dict['train'] = str(train_path)
+
+ if isinstance(data_dict['val'], str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ val_artifact = api.artifact(remove_prefix(data_dict['val']) + ':' + opt.artifact_alias)
+ val_dir = val_artifact.download()
+ val_path = Path(val_dir) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ if train_dir or val_dir:
+ ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')
+ with open(ddp_data_path, 'w') as f:
+ yaml.dump(data_dict, f)
+ opt.data = ddp_data_path
+
+
+class WandbLogger():
+ def __init__(self, opt, name, run_id, data_dict, job_type='Training'):
+ # Pre-training routine --
+ self.job_type = job_type
+ self.wandb, self.wandb_run, self.data_dict = wandb, None if not wandb else wandb.run, data_dict
+ # It's more elegant to stick to 1 wandb.init call, but useful config data is overwritten in the WandbLogger's wandb.init call
+ if isinstance(opt.resume, str): # checks resume from artifact
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ run_id, project, model_artifact_name = get_run_info(opt.resume)
+ model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name
+ assert wandb, 'install wandb to resume wandb runs'
+ # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config
+ self.wandb_run = wandb.init(id=run_id, project=project, resume='allow')
+ opt.resume = model_artifact_name
+ elif self.wandb:
+ self.wandb_run = wandb.init(config=opt,
+ resume="allow",
+ project='YOLOR' if opt.project == 'runs/train' else Path(opt.project).stem,
+ name=name,
+ job_type=job_type,
+ id=run_id) if not wandb.run else wandb.run
+ if self.wandb_run:
+ if self.job_type == 'Training':
+ if not opt.resume:
+ wandb_data_dict = self.check_and_upload_dataset(opt) if opt.upload_dataset else data_dict
+ # Info useful for resuming from artifacts
+ self.wandb_run.config.opt = vars(opt)
+ self.wandb_run.config.data_dict = wandb_data_dict
+ self.data_dict = self.setup_training(opt, data_dict)
+ if self.job_type == 'Dataset Creation':
+ self.data_dict = self.check_and_upload_dataset(opt)
+ else:
+ prefix = colorstr('wandb: ')
+ print(f"{prefix}Install Weights & Biases for YOLOR logging with 'pip install wandb' (recommended)")
+
+ def check_and_upload_dataset(self, opt):
+ assert wandb, 'Install wandb to upload dataset'
+ check_dataset(self.data_dict)
+ config_path = self.log_dataset_artifact(opt.data,
+ opt.single_cls,
+ 'YOLOR' if opt.project == 'runs/train' else Path(opt.project).stem)
+ print("Created dataset config file ", config_path)
+ with open(config_path) as f:
+ wandb_data_dict = yaml.load(f, Loader=yaml.SafeLoader)
+ return wandb_data_dict
+
+ def setup_training(self, opt, data_dict):
+ self.log_dict, self.current_epoch, self.log_imgs = {}, 0, 16 # Logging Constants
+ self.bbox_interval = opt.bbox_interval
+ if isinstance(opt.resume, str):
+ modeldir, _ = self.download_model_artifact(opt)
+ if modeldir:
+ self.weights = Path(modeldir) / "last.pt"
+ config = self.wandb_run.config
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp = str(
+ self.weights), config.save_period, config.total_batch_size, config.bbox_interval, config.epochs, \
+ config.opt['hyp']
+ data_dict = dict(self.wandb_run.config.data_dict) # eliminates the need for config file to resume
+ if 'val_artifact' not in self.__dict__: # If --upload_dataset is set, use the existing artifact, don't download
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(data_dict.get('train'),
+ opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(data_dict.get('val'),
+ opt.artifact_alias)
+ self.result_artifact, self.result_table, self.val_table, self.weights = None, None, None, None
+ if self.train_artifact_path is not None:
+ train_path = Path(self.train_artifact_path) / 'data/images/'
+ data_dict['train'] = str(train_path)
+ if self.val_artifact_path is not None:
+ val_path = Path(self.val_artifact_path) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ self.val_table = self.val_artifact.get("val")
+ self.map_val_table_path()
+ if self.val_artifact is not None:
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+ self.result_table = wandb.Table(["epoch", "id", "prediction", "avg_confidence"])
+ if opt.bbox_interval == -1:
+ self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ return data_dict
+
+ def download_dataset_artifact(self, path, alias):
+ if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):
+ dataset_artifact = wandb.use_artifact(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + ":" + alias)
+ assert dataset_artifact is not None, "'Error: W&B dataset artifact doesn\'t exist'"
+ datadir = dataset_artifact.download()
+ return datadir, dataset_artifact
+ return None, None
+
+ def download_model_artifact(self, opt):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
+ assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
+ modeldir = model_artifact.download()
+ epochs_trained = model_artifact.metadata.get('epochs_trained')
+ total_epochs = model_artifact.metadata.get('total_epochs')
+ assert epochs_trained < total_epochs, 'training to %g epochs is finished, nothing to resume.' % (
+ total_epochs)
+ return modeldir, model_artifact
+ return None, None
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model', type='model', metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score
+ })
+ model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
+ wandb.log_artifact(model_artifact,
+ aliases=['latest', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
+ print("Saving model artifact on epoch ", epoch + 1)
+
+ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):
+ with open(data_file) as f:
+ data = yaml.load(f, Loader=yaml.SafeLoader) # data dict
+ nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])
+ names = {k: v for k, v in enumerate(names)} # to index dictionary
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['train']), names, name='train') if data.get('train') else None
+ self.val_artifact = self.create_dataset_table(LoadImagesAndLabels(
+ data['val']), names, name='val') if data.get('val') else None
+ if data.get('train'):
+ data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
+ if data.get('val'):
+ data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
+ path = data_file if overwrite_config else '_wandb.'.join(data_file.rsplit('.', 1)) # updated data.yaml path
+ data.pop('download', None)
+ with open(path, 'w') as f:
+ yaml.dump(data, f)
+
+ if self.job_type == 'Training': # builds correct artifact pipeline graph
+ self.wandb_run.use_artifact(self.val_artifact)
+ self.wandb_run.use_artifact(self.train_artifact)
+ self.val_artifact.wait()
+ self.val_table = self.val_artifact.get('val')
+ self.map_val_table_path()
+ else:
+ self.wandb_run.log_artifact(self.train_artifact)
+ self.wandb_run.log_artifact(self.val_artifact)
+ return path
+
+ def map_val_table_path(self):
+ self.val_table_map = {}
+ print("Mapping dataset")
+ for i, data in enumerate(tqdm(self.val_table.data)):
+ self.val_table_map[data[3]] = data[0]
+
+ def create_dataset_table(self, dataset, class_to_id, name='dataset'):
+ # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
+ artifact = wandb.Artifact(name=name, type="dataset")
+ img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
+ img_files = tqdm(dataset.img_files) if not img_files else img_files
+ for img_file in img_files:
+ if Path(img_file).is_dir():
+ artifact.add_dir(img_file, name='data/images')
+ labels_path = 'labels'.join(dataset.path.rsplit('images', 1))
+ artifact.add_dir(labels_path, name='data/labels')
+ else:
+ artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
+ label_file = Path(img2label_paths([img_file])[0])
+ artifact.add_file(str(label_file),
+ name='data/labels/' + label_file.name) if label_file.exists() else None
+ table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
+ for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
+ height, width = shapes[0]
+ labels[:, 2:] = (xywh2xyxy(labels[:, 2:].view(-1, 4))) * torch.Tensor([width, height, width, height])
+ box_data, img_classes = [], {}
+ for cls, *xyxy in labels[:, 1:].tolist():
+ cls = int(cls)
+ box_data.append({"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls]),
+ "scores": {"acc": 1},
+ "domain": "pixel"})
+ img_classes[cls] = class_to_id[cls]
+ boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
+ table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), json.dumps(img_classes),
+ Path(paths).name)
+ artifact.add(table, name)
+ return artifact
+
+ def log_training_progress(self, predn, path, names):
+ if self.val_table and self.result_table:
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])
+ box_data = []
+ total_conf = 0
+ for *xyxy, conf, cls in predn.tolist():
+ if conf >= 0.25:
+ box_data.append(
+ {"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": "%s %.3f" % (names[cls], conf),
+ "scores": {"class_score": conf},
+ "domain": "pixel"})
+ total_conf = total_conf + conf
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ id = self.val_table_map[Path(path).name]
+ self.result_table.add_data(self.current_epoch,
+ id,
+ wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
+ total_conf / max(1, len(box_data))
+ )
+
+ def log(self, log_dict):
+ if self.wandb_run:
+ for key, value in log_dict.items():
+ self.log_dict[key] = value
+
+ def end_epoch(self, best_result=False):
+ if self.wandb_run:
+ wandb.log(self.log_dict)
+ self.log_dict = {}
+ if self.result_artifact:
+ train_results = wandb.JoinedTable(self.val_table, self.result_table, "id")
+ self.result_artifact.add(train_results, 'result')
+ wandb.log_artifact(self.result_artifact, aliases=['latest', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
+ self.result_table = wandb.Table(["epoch", "id", "prediction", "avg_confidence"])
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+
+ def finish_run(self):
+ if self.wandb_run:
+ if self.log_dict:
+ wandb.log(self.log_dict)
+ wandb.run.finish()
diff --git a/results/instance-segmentation/horses.jpg b/results/instance-segmentation/horses.jpg
new file mode 100644
index 000000000..a3b9648ea
Binary files /dev/null and b/results/instance-segmentation/horses.jpg differ
diff --git a/results/instance-segmentation/instance.mp4 b/results/instance-segmentation/instance.mp4
new file mode 100644
index 000000000..a64d1f30c
Binary files /dev/null and b/results/instance-segmentation/instance.mp4 differ
diff --git a/results/instance-segmentation/readme.md b/results/instance-segmentation/readme.md
new file mode 100644
index 000000000..9b6019000
--- /dev/null
+++ b/results/instance-segmentation/readme.md
@@ -0,0 +1,4 @@
+- To run the instance segmentation
+``` python ipex/seg/segment/predict.py --weights yolov7-seg.pt --source https://www.youtube.com/watch?v=A46cuxIPUSs&t=15s ```
+- Results saved at
+``` seg/runs/predict-seg/exp ```
diff --git a/yolov7_seg/README.md b/yolov7_seg/README.md
new file mode 100644
index 000000000..4ba85cfc2
--- /dev/null
+++ b/yolov7_seg/README.md
@@ -0,0 +1,17 @@
+# yolov7
+
+Implementation of "YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors"
+
+This implimentation is based on [yolov5](https://github.com/ultralytics/yolov5).
+
+## Object detection
+
+[code](./det)
+
+## Instance segmentation
+
+[code](./seg)
+
+## Image classification
+
+[code](./det)
diff --git a/yolov7_seg/cls/LICENSE b/yolov7_seg/cls/LICENSE
new file mode 100644
index 000000000..d96f36bb0
--- /dev/null
+++ b/yolov7_seg/cls/LICENSE
@@ -0,0 +1,674 @@
+GNU GENERAL PUBLIC LICENSE
+ Version 3, 29 June 2007
+
+ Copyright (C) 2007 Free Software Foundation, Inc.
+ Everyone is permitted to copy and distribute verbatim copies
+ of this license document, but changing it is not allowed.
+
+ Preamble
+
+ The GNU General Public License is a free, copyleft license for
+software and other kinds of works.
+
+ The licenses for most software and other practical works are designed
+to take away your freedom to share and change the works. By contrast,
+the GNU General Public License is intended to guarantee your freedom to
+share and change all versions of a program--to make sure it remains free
+software for all its users. We, the Free Software Foundation, use the
+GNU General Public License for most of our software; it applies also to
+any other work released this way by its authors. You can apply it to
+your programs, too.
+
+ When we speak of free software, we are referring to freedom, not
+price. Our General Public Licenses are designed to make sure that you
+have the freedom to distribute copies of free software (and charge for
+them if you wish), that you receive source code or can get it if you
+want it, that you can change the software or use pieces of it in new
+free programs, and that you know you can do these things.
+
+ To protect your rights, we need to prevent others from denying you
+these rights or asking you to surrender the rights. Therefore, you have
+certain responsibilities if you distribute copies of the software, or if
+you modify it: responsibilities to respect the freedom of others.
+
+ For example, if you distribute copies of such a program, whether
+gratis or for a fee, you must pass on to the recipients the same
+freedoms that you received. You must make sure that they, too, receive
+or can get the source code. And you must show them these terms so they
+know their rights.
+
+ Developers that use the GNU GPL protect your rights with two steps:
+(1) assert copyright on the software, and (2) offer you this License
+giving you legal permission to copy, distribute and/or modify it.
+
+ For the developers' and authors' protection, the GPL clearly explains
+that there is no warranty for this free software. For both users' and
+authors' sake, the GPL requires that modified versions be marked as
+changed, so that their problems will not be attributed erroneously to
+authors of previous versions.
+
+ Some devices are designed to deny users access to install or run
+modified versions of the software inside them, although the manufacturer
+can do so. This is fundamentally incompatible with the aim of
+protecting users' freedom to change the software. The systematic
+pattern of such abuse occurs in the area of products for individuals to
+use, which is precisely where it is most unacceptable. Therefore, we
+have designed this version of the GPL to prohibit the practice for those
+products. If such problems arise substantially in other domains, we
+stand ready to extend this provision to those domains in future versions
+of the GPL, as needed to protect the freedom of users.
+
+ Finally, every program is threatened constantly by software patents.
+States should not allow patents to restrict development and use of
+software on general-purpose computers, but in those that do, we wish to
+avoid the special danger that patents applied to a free program could
+make it effectively proprietary. To prevent this, the GPL assures that
+patents cannot be used to render the program non-free.
+
+ The precise terms and conditions for copying, distribution and
+modification follow.
+
+ TERMS AND CONDITIONS
+
+ 0. Definitions.
+
+ "This License" refers to version 3 of the GNU General Public License.
+
+ "Copyright" also means copyright-like laws that apply to other kinds of
+works, such as semiconductor masks.
+
+ "The Program" refers to any copyrightable work licensed under this
+License. Each licensee is addressed as "you". "Licensees" and
+"recipients" may be individuals or organizations.
+
+ To "modify" a work means to copy from or adapt all or part of the work
+in a fashion requiring copyright permission, other than the making of an
+exact copy. The resulting work is called a "modified version" of the
+earlier work or a work "based on" the earlier work.
+
+ A "covered work" means either the unmodified Program or a work based
+on the Program.
+
+ To "propagate" a work means to do anything with it that, without
+permission, would make you directly or secondarily liable for
+infringement under applicable copyright law, except executing it on a
+computer or modifying a private copy. Propagation includes copying,
+distribution (with or without modification), making available to the
+public, and in some countries other activities as well.
+
+ To "convey" a work means any kind of propagation that enables other
+parties to make or receive copies. Mere interaction with a user through
+a computer network, with no transfer of a copy, is not conveying.
+
+ An interactive user interface displays "Appropriate Legal Notices"
+to the extent that it includes a convenient and prominently visible
+feature that (1) displays an appropriate copyright notice, and (2)
+tells the user that there is no warranty for the work (except to the
+extent that warranties are provided), that licensees may convey the
+work under this License, and how to view a copy of this License. If
+the interface presents a list of user commands or options, such as a
+menu, a prominent item in the list meets this criterion.
+
+ 1. Source Code.
+
+ The "source code" for a work means the preferred form of the work
+for making modifications to it. "Object code" means any non-source
+form of a work.
+
+ A "Standard Interface" means an interface that either is an official
+standard defined by a recognized standards body, or, in the case of
+interfaces specified for a particular programming language, one that
+is widely used among developers working in that language.
+
+ The "System Libraries" of an executable work include anything, other
+than the work as a whole, that (a) is included in the normal form of
+packaging a Major Component, but which is not part of that Major
+Component, and (b) serves only to enable use of the work with that
+Major Component, or to implement a Standard Interface for which an
+implementation is available to the public in source code form. A
+"Major Component", in this context, means a major essential component
+(kernel, window system, and so on) of the specific operating system
+(if any) on which the executable work runs, or a compiler used to
+produce the work, or an object code interpreter used to run it.
+
+ The "Corresponding Source" for a work in object code form means all
+the source code needed to generate, install, and (for an executable
+work) run the object code and to modify the work, including scripts to
+control those activities. However, it does not include the work's
+System Libraries, or general-purpose tools or generally available free
+programs which are used unmodified in performing those activities but
+which are not part of the work. For example, Corresponding Source
+includes interface definition files associated with source files for
+the work, and the source code for shared libraries and dynamically
+linked subprograms that the work is specifically designed to require,
+such as by intimate data communication or control flow between those
+subprograms and other parts of the work.
+
+ The Corresponding Source need not include anything that users
+can regenerate automatically from other parts of the Corresponding
+Source.
+
+ The Corresponding Source for a work in source code form is that
+same work.
+
+ 2. Basic Permissions.
+
+ All rights granted under this License are granted for the term of
+copyright on the Program, and are irrevocable provided the stated
+conditions are met. This License explicitly affirms your unlimited
+permission to run the unmodified Program. The output from running a
+covered work is covered by this License only if the output, given its
+content, constitutes a covered work. This License acknowledges your
+rights of fair use or other equivalent, as provided by copyright law.
+
+ You may make, run and propagate covered works that you do not
+convey, without conditions so long as your license otherwise remains
+in force. You may convey covered works to others for the sole purpose
+of having them make modifications exclusively for you, or provide you
+with facilities for running those works, provided that you comply with
+the terms of this License in conveying all material for which you do
+not control copyright. Those thus making or running the covered works
+for you must do so exclusively on your behalf, under your direction
+and control, on terms that prohibit them from making any copies of
+your copyrighted material outside their relationship with you.
+
+ Conveying under any other circumstances is permitted solely under
+the conditions stated below. Sublicensing is not allowed; section 10
+makes it unnecessary.
+
+ 3. Protecting Users' Legal Rights From Anti-Circumvention Law.
+
+ No covered work shall be deemed part of an effective technological
+measure under any applicable law fulfilling obligations under article
+11 of the WIPO copyright treaty adopted on 20 December 1996, or
+similar laws prohibiting or restricting circumvention of such
+measures.
+
+ When you convey a covered work, you waive any legal power to forbid
+circumvention of technological measures to the extent such circumvention
+is effected by exercising rights under this License with respect to
+the covered work, and you disclaim any intention to limit operation or
+modification of the work as a means of enforcing, against the work's
+users, your or third parties' legal rights to forbid circumvention of
+technological measures.
+
+ 4. Conveying Verbatim Copies.
+
+ You may convey verbatim copies of the Program's source code as you
+receive it, in any medium, provided that you conspicuously and
+appropriately publish on each copy an appropriate copyright notice;
+keep intact all notices stating that this License and any
+non-permissive terms added in accord with section 7 apply to the code;
+keep intact all notices of the absence of any warranty; and give all
+recipients a copy of this License along with the Program.
+
+ You may charge any price or no price for each copy that you convey,
+and you may offer support or warranty protection for a fee.
+
+ 5. Conveying Modified Source Versions.
+
+ You may convey a work based on the Program, or the modifications to
+produce it from the Program, in the form of source code under the
+terms of section 4, provided that you also meet all of these conditions:
+
+ a) The work must carry prominent notices stating that you modified
+ it, and giving a relevant date.
+
+ b) The work must carry prominent notices stating that it is
+ released under this License and any conditions added under section
+ 7. This requirement modifies the requirement in section 4 to
+ "keep intact all notices".
+
+ c) You must license the entire work, as a whole, under this
+ License to anyone who comes into possession of a copy. This
+ License will therefore apply, along with any applicable section 7
+ additional terms, to the whole of the work, and all its parts,
+ regardless of how they are packaged. This License gives no
+ permission to license the work in any other way, but it does not
+ invalidate such permission if you have separately received it.
+
+ d) If the work has interactive user interfaces, each must display
+ Appropriate Legal Notices; however, if the Program has interactive
+ interfaces that do not display Appropriate Legal Notices, your
+ work need not make them do so.
+
+ A compilation of a covered work with other separate and independent
+works, which are not by their nature extensions of the covered work,
+and which are not combined with it such as to form a larger program,
+in or on a volume of a storage or distribution medium, is called an
+"aggregate" if the compilation and its resulting copyright are not
+used to limit the access or legal rights of the compilation's users
+beyond what the individual works permit. Inclusion of a covered work
+in an aggregate does not cause this License to apply to the other
+parts of the aggregate.
+
+ 6. Conveying Non-Source Forms.
+
+ You may convey a covered work in object code form under the terms
+of sections 4 and 5, provided that you also convey the
+machine-readable Corresponding Source under the terms of this License,
+in one of these ways:
+
+ a) Convey the object code in, or embodied in, a physical product
+ (including a physical distribution medium), accompanied by the
+ Corresponding Source fixed on a durable physical medium
+ customarily used for software interchange.
+
+ b) Convey the object code in, or embodied in, a physical product
+ (including a physical distribution medium), accompanied by a
+ written offer, valid for at least three years and valid for as
+ long as you offer spare parts or customer support for that product
+ model, to give anyone who possesses the object code either (1) a
+ copy of the Corresponding Source for all the software in the
+ product that is covered by this License, on a durable physical
+ medium customarily used for software interchange, for a price no
+ more than your reasonable cost of physically performing this
+ conveying of source, or (2) access to copy the
+ Corresponding Source from a network server at no charge.
+
+ c) Convey individual copies of the object code with a copy of the
+ written offer to provide the Corresponding Source. This
+ alternative is allowed only occasionally and noncommercially, and
+ only if you received the object code with such an offer, in accord
+ with subsection 6b.
+
+ d) Convey the object code by offering access from a designated
+ place (gratis or for a charge), and offer equivalent access to the
+ Corresponding Source in the same way through the same place at no
+ further charge. You need not require recipients to copy the
+ Corresponding Source along with the object code. If the place to
+ copy the object code is a network server, the Corresponding Source
+ may be on a different server (operated by you or a third party)
+ that supports equivalent copying facilities, provided you maintain
+ clear directions next to the object code saying where to find the
+ Corresponding Source. Regardless of what server hosts the
+ Corresponding Source, you remain obligated to ensure that it is
+ available for as long as needed to satisfy these requirements.
+
+ e) Convey the object code using peer-to-peer transmission, provided
+ you inform other peers where the object code and Corresponding
+ Source of the work are being offered to the general public at no
+ charge under subsection 6d.
+
+ A separable portion of the object code, whose source code is excluded
+from the Corresponding Source as a System Library, need not be
+included in conveying the object code work.
+
+ A "User Product" is either (1) a "consumer product", which means any
+tangible personal property which is normally used for personal, family,
+or household purposes, or (2) anything designed or sold for incorporation
+into a dwelling. In determining whether a product is a consumer product,
+doubtful cases shall be resolved in favor of coverage. For a particular
+product received by a particular user, "normally used" refers to a
+typical or common use of that class of product, regardless of the status
+of the particular user or of the way in which the particular user
+actually uses, or expects or is expected to use, the product. A product
+is a consumer product regardless of whether the product has substantial
+commercial, industrial or non-consumer uses, unless such uses represent
+the only significant mode of use of the product.
+
+ "Installation Information" for a User Product means any methods,
+procedures, authorization keys, or other information required to install
+and execute modified versions of a covered work in that User Product from
+a modified version of its Corresponding Source. The information must
+suffice to ensure that the continued functioning of the modified object
+code is in no case prevented or interfered with solely because
+modification has been made.
+
+ If you convey an object code work under this section in, or with, or
+specifically for use in, a User Product, and the conveying occurs as
+part of a transaction in which the right of possession and use of the
+User Product is transferred to the recipient in perpetuity or for a
+fixed term (regardless of how the transaction is characterized), the
+Corresponding Source conveyed under this section must be accompanied
+by the Installation Information. But this requirement does not apply
+if neither you nor any third party retains the ability to install
+modified object code on the User Product (for example, the work has
+been installed in ROM).
+
+ The requirement to provide Installation Information does not include a
+requirement to continue to provide support service, warranty, or updates
+for a work that has been modified or installed by the recipient, or for
+the User Product in which it has been modified or installed. Access to a
+network may be denied when the modification itself materially and
+adversely affects the operation of the network or violates the rules and
+protocols for communication across the network.
+
+ Corresponding Source conveyed, and Installation Information provided,
+in accord with this section must be in a format that is publicly
+documented (and with an implementation available to the public in
+source code form), and must require no special password or key for
+unpacking, reading or copying.
+
+ 7. Additional Terms.
+
+ "Additional permissions" are terms that supplement the terms of this
+License by making exceptions from one or more of its conditions.
+Additional permissions that are applicable to the entire Program shall
+be treated as though they were included in this License, to the extent
+that they are valid under applicable law. If additional permissions
+apply only to part of the Program, that part may be used separately
+under those permissions, but the entire Program remains governed by
+this License without regard to the additional permissions.
+
+ When you convey a copy of a covered work, you may at your option
+remove any additional permissions from that copy, or from any part of
+it. (Additional permissions may be written to require their own
+removal in certain cases when you modify the work.) You may place
+additional permissions on material, added by you to a covered work,
+for which you have or can give appropriate copyright permission.
+
+ Notwithstanding any other provision of this License, for material you
+add to a covered work, you may (if authorized by the copyright holders of
+that material) supplement the terms of this License with terms:
+
+ a) Disclaiming warranty or limiting liability differently from the
+ terms of sections 15 and 16 of this License; or
+
+ b) Requiring preservation of specified reasonable legal notices or
+ author attributions in that material or in the Appropriate Legal
+ Notices displayed by works containing it; or
+
+ c) Prohibiting misrepresentation of the origin of that material, or
+ requiring that modified versions of such material be marked in
+ reasonable ways as different from the original version; or
+
+ d) Limiting the use for publicity purposes of names of licensors or
+ authors of the material; or
+
+ e) Declining to grant rights under trademark law for use of some
+ trade names, trademarks, or service marks; or
+
+ f) Requiring indemnification of licensors and authors of that
+ material by anyone who conveys the material (or modified versions of
+ it) with contractual assumptions of liability to the recipient, for
+ any liability that these contractual assumptions directly impose on
+ those licensors and authors.
+
+ All other non-permissive additional terms are considered "further
+restrictions" within the meaning of section 10. If the Program as you
+received it, or any part of it, contains a notice stating that it is
+governed by this License along with a term that is a further
+restriction, you may remove that term. If a license document contains
+a further restriction but permits relicensing or conveying under this
+License, you may add to a covered work material governed by the terms
+of that license document, provided that the further restriction does
+not survive such relicensing or conveying.
+
+ If you add terms to a covered work in accord with this section, you
+must place, in the relevant source files, a statement of the
+additional terms that apply to those files, or a notice indicating
+where to find the applicable terms.
+
+ Additional terms, permissive or non-permissive, may be stated in the
+form of a separately written license, or stated as exceptions;
+the above requirements apply either way.
+
+ 8. Termination.
+
+ You may not propagate or modify a covered work except as expressly
+provided under this License. Any attempt otherwise to propagate or
+modify it is void, and will automatically terminate your rights under
+this License (including any patent licenses granted under the third
+paragraph of section 11).
+
+ However, if you cease all violation of this License, then your
+license from a particular copyright holder is reinstated (a)
+provisionally, unless and until the copyright holder explicitly and
+finally terminates your license, and (b) permanently, if the copyright
+holder fails to notify you of the violation by some reasonable means
+prior to 60 days after the cessation.
+
+ Moreover, your license from a particular copyright holder is
+reinstated permanently if the copyright holder notifies you of the
+violation by some reasonable means, this is the first time you have
+received notice of violation of this License (for any work) from that
+copyright holder, and you cure the violation prior to 30 days after
+your receipt of the notice.
+
+ Termination of your rights under this section does not terminate the
+licenses of parties who have received copies or rights from you under
+this License. If your rights have been terminated and not permanently
+reinstated, you do not qualify to receive new licenses for the same
+material under section 10.
+
+ 9. Acceptance Not Required for Having Copies.
+
+ You are not required to accept this License in order to receive or
+run a copy of the Program. Ancillary propagation of a covered work
+occurring solely as a consequence of using peer-to-peer transmission
+to receive a copy likewise does not require acceptance. However,
+nothing other than this License grants you permission to propagate or
+modify any covered work. These actions infringe copyright if you do
+not accept this License. Therefore, by modifying or propagating a
+covered work, you indicate your acceptance of this License to do so.
+
+ 10. Automatic Licensing of Downstream Recipients.
+
+ Each time you convey a covered work, the recipient automatically
+receives a license from the original licensors, to run, modify and
+propagate that work, subject to this License. You are not responsible
+for enforcing compliance by third parties with this License.
+
+ An "entity transaction" is a transaction transferring control of an
+organization, or substantially all assets of one, or subdividing an
+organization, or merging organizations. If propagation of a covered
+work results from an entity transaction, each party to that
+transaction who receives a copy of the work also receives whatever
+licenses to the work the party's predecessor in interest had or could
+give under the previous paragraph, plus a right to possession of the
+Corresponding Source of the work from the predecessor in interest, if
+the predecessor has it or can get it with reasonable efforts.
+
+ You may not impose any further restrictions on the exercise of the
+rights granted or affirmed under this License. For example, you may
+not impose a license fee, royalty, or other charge for exercise of
+rights granted under this License, and you may not initiate litigation
+(including a cross-claim or counterclaim in a lawsuit) alleging that
+any patent claim is infringed by making, using, selling, offering for
+sale, or importing the Program or any portion of it.
+
+ 11. Patents.
+
+ A "contributor" is a copyright holder who authorizes use under this
+License of the Program or a work on which the Program is based. The
+work thus licensed is called the contributor's "contributor version".
+
+ A contributor's "essential patent claims" are all patent claims
+owned or controlled by the contributor, whether already acquired or
+hereafter acquired, that would be infringed by some manner, permitted
+by this License, of making, using, or selling its contributor version,
+but do not include claims that would be infringed only as a
+consequence of further modification of the contributor version. For
+purposes of this definition, "control" includes the right to grant
+patent sublicenses in a manner consistent with the requirements of
+this License.
+
+ Each contributor grants you a non-exclusive, worldwide, royalty-free
+patent license under the contributor's essential patent claims, to
+make, use, sell, offer for sale, import and otherwise run, modify and
+propagate the contents of its contributor version.
+
+ In the following three paragraphs, a "patent license" is any express
+agreement or commitment, however denominated, not to enforce a patent
+(such as an express permission to practice a patent or covenant not to
+sue for patent infringement). To "grant" such a patent license to a
+party means to make such an agreement or commitment not to enforce a
+patent against the party.
+
+ If you convey a covered work, knowingly relying on a patent license,
+and the Corresponding Source of the work is not available for anyone
+to copy, free of charge and under the terms of this License, through a
+publicly available network server or other readily accessible means,
+then you must either (1) cause the Corresponding Source to be so
+available, or (2) arrange to deprive yourself of the benefit of the
+patent license for this particular work, or (3) arrange, in a manner
+consistent with the requirements of this License, to extend the patent
+license to downstream recipients. "Knowingly relying" means you have
+actual knowledge that, but for the patent license, your conveying the
+covered work in a country, or your recipient's use of the covered work
+in a country, would infringe one or more identifiable patents in that
+country that you have reason to believe are valid.
+
+ If, pursuant to or in connection with a single transaction or
+arrangement, you convey, or propagate by procuring conveyance of, a
+covered work, and grant a patent license to some of the parties
+receiving the covered work authorizing them to use, propagate, modify
+or convey a specific copy of the covered work, then the patent license
+you grant is automatically extended to all recipients of the covered
+work and works based on it.
+
+ A patent license is "discriminatory" if it does not include within
+the scope of its coverage, prohibits the exercise of, or is
+conditioned on the non-exercise of one or more of the rights that are
+specifically granted under this License. You may not convey a covered
+work if you are a party to an arrangement with a third party that is
+in the business of distributing software, under which you make payment
+to the third party based on the extent of your activity of conveying
+the work, and under which the third party grants, to any of the
+parties who would receive the covered work from you, a discriminatory
+patent license (a) in connection with copies of the covered work
+conveyed by you (or copies made from those copies), or (b) primarily
+for and in connection with specific products or compilations that
+contain the covered work, unless you entered into that arrangement,
+or that patent license was granted, prior to 28 March 2007.
+
+ Nothing in this License shall be construed as excluding or limiting
+any implied license or other defenses to infringement that may
+otherwise be available to you under applicable patent law.
+
+ 12. No Surrender of Others' Freedom.
+
+ If conditions are imposed on you (whether by court order, agreement or
+otherwise) that contradict the conditions of this License, they do not
+excuse you from the conditions of this License. If you cannot convey a
+covered work so as to satisfy simultaneously your obligations under this
+License and any other pertinent obligations, then as a consequence you may
+not convey it at all. For example, if you agree to terms that obligate you
+to collect a royalty for further conveying from those to whom you convey
+the Program, the only way you could satisfy both those terms and this
+License would be to refrain entirely from conveying the Program.
+
+ 13. Use with the GNU Affero General Public License.
+
+ Notwithstanding any other provision of this License, you have
+permission to link or combine any covered work with a work licensed
+under version 3 of the GNU Affero General Public License into a single
+combined work, and to convey the resulting work. The terms of this
+License will continue to apply to the part which is the covered work,
+but the special requirements of the GNU Affero General Public License,
+section 13, concerning interaction through a network will apply to the
+combination as such.
+
+ 14. Revised Versions of this License.
+
+ The Free Software Foundation may publish revised and/or new versions of
+the GNU General Public License from time to time. Such new versions will
+be similar in spirit to the present version, but may differ in detail to
+address new problems or concerns.
+
+ Each version is given a distinguishing version number. If the
+Program specifies that a certain numbered version of the GNU General
+Public License "or any later version" applies to it, you have the
+option of following the terms and conditions either of that numbered
+version or of any later version published by the Free Software
+Foundation. If the Program does not specify a version number of the
+GNU General Public License, you may choose any version ever published
+by the Free Software Foundation.
+
+ If the Program specifies that a proxy can decide which future
+versions of the GNU General Public License can be used, that proxy's
+public statement of acceptance of a version permanently authorizes you
+to choose that version for the Program.
+
+ Later license versions may give you additional or different
+permissions. However, no additional obligations are imposed on any
+author or copyright holder as a result of your choosing to follow a
+later version.
+
+ 15. Disclaimer of Warranty.
+
+ THERE IS NO WARRANTY FOR THE PROGRAM, TO THE EXTENT PERMITTED BY
+APPLICABLE LAW. EXCEPT WHEN OTHERWISE STATED IN WRITING THE COPYRIGHT
+HOLDERS AND/OR OTHER PARTIES PROVIDE THE PROGRAM "AS IS" WITHOUT WARRANTY
+OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING, BUT NOT LIMITED TO,
+THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
+PURPOSE. THE ENTIRE RISK AS TO THE QUALITY AND PERFORMANCE OF THE PROGRAM
+IS WITH YOU. SHOULD THE PROGRAM PROVE DEFECTIVE, YOU ASSUME THE COST OF
+ALL NECESSARY SERVICING, REPAIR OR CORRECTION.
+
+ 16. Limitation of Liability.
+
+ IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW OR AGREED TO IN WRITING
+WILL ANY COPYRIGHT HOLDER, OR ANY OTHER PARTY WHO MODIFIES AND/OR CONVEYS
+THE PROGRAM AS PERMITTED ABOVE, BE LIABLE TO YOU FOR DAMAGES, INCLUDING ANY
+GENERAL, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING OUT OF THE
+USE OR INABILITY TO USE THE PROGRAM (INCLUDING BUT NOT LIMITED TO LOSS OF
+DATA OR DATA BEING RENDERED INACCURATE OR LOSSES SUSTAINED BY YOU OR THIRD
+PARTIES OR A FAILURE OF THE PROGRAM TO OPERATE WITH ANY OTHER PROGRAMS),
+EVEN IF SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE POSSIBILITY OF
+SUCH DAMAGES.
+
+ 17. Interpretation of Sections 15 and 16.
+
+ If the disclaimer of warranty and limitation of liability provided
+above cannot be given local legal effect according to their terms,
+reviewing courts shall apply local law that most closely approximates
+an absolute waiver of all civil liability in connection with the
+Program, unless a warranty or assumption of liability accompanies a
+copy of the Program in return for a fee.
+
+ END OF TERMS AND CONDITIONS
+
+ How to Apply These Terms to Your New Programs
+
+ If you develop a new program, and you want it to be of the greatest
+possible use to the public, the best way to achieve this is to make it
+free software which everyone can redistribute and change under these terms.
+
+ To do so, attach the following notices to the program. It is safest
+to attach them to the start of each source file to most effectively
+state the exclusion of warranty; and each file should have at least
+the "copyright" line and a pointer to where the full notice is found.
+
+
+ Copyright (C)
+
+ This program is free software: you can redistribute it and/or modify
+ it under the terms of the GNU General Public License as published by
+ the Free Software Foundation, either version 3 of the License, or
+ (at your option) any later version.
+
+ This program is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
+ GNU General Public License for more details.
+
+ You should have received a copy of the GNU General Public License
+ along with this program. If not, see .
+
+Also add information on how to contact you by electronic and paper mail.
+
+ If the program does terminal interaction, make it output a short
+notice like this when it starts in an interactive mode:
+
+ Copyright (C)
+ This program comes with ABSOLUTELY NO WARRANTY; for details type `show w'.
+ This is free software, and you are welcome to redistribute it
+ under certain conditions; type `show c' for details.
+
+The hypothetical commands `show w' and `show c' should show the appropriate
+parts of the General Public License. Of course, your program's commands
+might be different; for a GUI interface, you would use an "about box".
+
+ You should also get your employer (if you work as a programmer) or school,
+if any, to sign a "copyright disclaimer" for the program, if necessary.
+For more information on this, and how to apply and follow the GNU GPL, see
+.
+
+ The GNU General Public License does not permit incorporating your program
+into proprietary programs. If your program is a subroutine library, you
+may consider it more useful to permit linking proprietary applications with
+the library. If this is what you want to do, use the GNU Lesser General
+Public License instead of this License. But first, please read
+.
diff --git a/yolov7_seg/cls/README.md b/yolov7_seg/cls/README.md
new file mode 100644
index 000000000..ff3812f68
--- /dev/null
+++ b/yolov7_seg/cls/README.md
@@ -0,0 +1,29 @@
+# yolov7
+
+Implementation of "YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors"
+
+This implimentation is based on [yolov5](https://github.com/ultralytics/yolov5).
+
+All of installation, data preparation, and usage are as same as yolov5.
+
+## Training
+
+``` shell
+python classifier.py --pretrained False --data imagenet --epochs 90 --img 224 --batch 256 --model yolov7 --name yolov7-cls --lr0 0.1 --optimizer SGD
+```
+
+## Results
+
+[`yolov7-cls.pt`](https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7-cls.pt)
+
+```
+Top-1: 78.3%
+Top-5: 94.1%
+```
+
+[`yolov7-clsn.pt`](https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7-clsn.pt)
+
+```
+Top-1: 78.2%
+Top-5: 94.3%
+```
diff --git a/yolov7_seg/cls/classifier.py b/yolov7_seg/cls/classifier.py
new file mode 100644
index 000000000..b36112387
--- /dev/null
+++ b/yolov7_seg/cls/classifier.py
@@ -0,0 +1,433 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Train a YOLOv5 classifier model on a classification dataset
+
+Usage - train:
+ $ python classifier.py --model yolov5s --data cifar100 --epochs 5 --img 224 --batch 128
+ $ python -m torch.distributed.run --nproc_per_node 4 --master_port 1 classifier.py --model yolov5s --data imagenet --epochs 5 --img 224 --device 4,5,6,7
+
+Usage - inference:
+ from classifier import *
+
+ model = torch.load('path/to/best.pt', map_location=torch.device('cpu'))['model'].float()
+ files = Path('../datasets/mnist/test/7').glob('*.png') # images from dir
+ for f in list(files)[:10]: # first 10 images
+ classify(model, size=128, file=f)
+"""
+
+import argparse
+import math
+import os
+import subprocess
+import sys
+import time
+from copy import deepcopy
+from datetime import datetime
+from pathlib import Path
+
+import torch
+import torch.distributed as dist
+import torch.hub as hub
+import torch.nn as nn
+import torch.optim.lr_scheduler as lr_scheduler
+import torchvision
+from torch.cuda import amp
+from tqdm import tqdm
+from models.yolo import Model
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from utils.augmentations import denormalize, normalize
+from utils.dataloaders import create_classification_dataloader
+from utils.general import (LOGGER, check_git_status, check_requirements, colorstr, download, emojis, increment_path,
+ init_seeds, print_args)
+from utils.loggers import GenericLogger
+from utils.torch_utils import (ModelEMA, model_info, select_device, smart_DDP, smart_hub_load, smart_optimizer,
+ torch_distributed_zero_first, update_classifier_model)
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+
+def train(opt, device):
+ init_seeds(opt.seed + 1 + RANK, deterministic=True)
+ save_dir, data, bs, epochs, nw, imgsz, pretrained = \
+ Path(opt.save_dir), Path(opt.data), opt.batch_size, opt.epochs, min(os.cpu_count() - 1, opt.workers), \
+ opt.imgsz, str(opt.pretrained).lower() == 'true'
+ cuda = device.type != 'cpu'
+
+ # Directories
+ wdir = save_dir / 'weights'
+ wdir.mkdir(parents=True, exist_ok=True) # make dir
+ last, best = wdir / 'last.pt', wdir / 'best.pt'
+
+ # Logger
+ logger = GenericLogger(opt=opt, console_logger=LOGGER) if RANK in {-1, 0} else None
+
+ # Download Dataset
+ with torch_distributed_zero_first(LOCAL_RANK):
+ data_dir = data if data.is_dir() else (FILE.parents[1] / 'datasets' / data)
+ if not data_dir.is_dir():
+ LOGGER.info(emojis(f'\nDataset not found ⚠️, missing path {data_dir}, attempting download...'))
+ t = time.time()
+ if data == 'imagenet':
+ subprocess.run(f"bash {ROOT / 'data/scripts/get_imagenet.sh'}", shell=True, check=True)
+ else:
+ url = f'https://github.com/ultralytics/yolov5/releases/download/v1.0/{data}.zip'
+ download(url, dir=data_dir.parent)
+ s = f"Dataset download success ✅ ({time.time() - t:.1f}s), saved to {colorstr('bold', data_dir)}\n"
+ LOGGER.info(emojis(s))
+
+ # Dataloaders
+ nc = len([x for x in (data_dir / 'train').glob('*') if x.is_dir()]) # number of classes
+ trainloader = create_classification_dataloader(path=data_dir / 'train',
+ imgsz=imgsz,
+ batch_size=bs // WORLD_SIZE,
+ augment=True,
+ cache=opt.cache,
+ rank=LOCAL_RANK,
+ workers=nw)
+
+ test_dir = data_dir / 'test' if (data_dir / 'test').exists() else data_dir / 'val' # data/test or data/val
+ if RANK in {-1, 0}:
+ testloader = create_classification_dataloader(path=test_dir,
+ imgsz=imgsz,
+ batch_size=bs // WORLD_SIZE * 2,
+ augment=False,
+ cache=opt.cache,
+ rank=-1,
+ workers=nw)
+
+ # Initialize
+ names = trainloader.dataset.classes # class names
+ LOGGER.info(f'Training {opt.model} on {data} dataset with {nc} classes...')
+
+ # Model
+ repo1, repo2 = 'ultralytics/yolov5', 'pytorch/vision'
+ with torch_distributed_zero_first(LOCAL_RANK):
+ if opt.model == 'list':
+ m = hub.list(repo1) + hub.list(repo2) # models
+ LOGGER.info('\nAvailable models. Usage: python classifier.py --model MODEL\n' + '\n'.join(m))
+ return
+ elif opt.model.startswith('yolov5'): # YOLOv5 models, i.e. yolov5s, yolov5m
+ from models.yolo import ClassificationModel
+ #model = smart_hub_load(repo1,
+ # opt.model,
+ # pretrained=pretrained,
+ # _verbose=False,
+ # autoshape=False,
+ # device='cpu') # detection model
+ model = Model('models/yolov5l.yaml', ch=3, nc=80, anchors=3).to(device)
+ model = ClassificationModel(model=model, nc=nc, cutoff=opt.cutoff or 10) # classification model
+ #print(model)
+ elif opt.model.startswith('yolov7'): # YOLOv5 models, i.e. yolov5s, yolov5m
+ from models.yolo import ClassificationModel
+ model = Model('models/yolov7.yaml', ch=3, nc=80, anchors=3).to(device)
+ #print(model.save)
+ model = ClassificationModel(model=model, nc=nc, cutoff=opt.cutoff or 52) # classification model
+ #model = ClassificationModel(model=model, nc=nc, cutoff=opt.cutoff or 52) # classification model
+ #print(model)
+ elif opt.model in torchvision.models.__dict__: # TorchVision models i.e. resnet50, efficientnet_b0
+ model = torchvision.models.__dict__[opt.model](weights='IMAGENET1K_V1' if pretrained else None)
+ update_classifier_model(model, nc) # update class count
+ else:
+ m = hub.list(repo1) + hub.list(repo2) # models
+ raise ModuleNotFoundError(f'--model {opt.model} not found. Available models are: \n' + '\n'.join(m))
+ for p in model.parameters():
+ p.requires_grad = True # for training
+ for m in model.modules():
+ if isinstance(m, torch.nn.Dropout) and opt.dropout is not None:
+ m.p = opt.dropout # set dropout
+ model = model.to(device)
+ model.names = names # attach class names
+
+ # Info
+ if RANK in {-1, 0}:
+ model_info(model)
+ if opt.verbose:
+ LOGGER.info(model)
+ images, labels = next(iter(trainloader))
+ file = imshow(denormalize(images[:25]), labels[:25], names=names, f=save_dir / 'train_images.jpg')
+ logger.log_images(file, name='Train Examples')
+ logger.log_graph(model, imgsz) # log model
+
+ # Optimizer
+ optimizer = smart_optimizer(model, opt.optimizer, opt.lr0, momentum=0.9, decay=5e-5)
+
+ # Scheduler
+ lrf = 0.01 # final lr (fraction of lr0)
+ # lf = lambda x: ((1 + math.cos(x * math.pi / epochs)) / 2) * (1 - lrf) + lrf # cosine
+ lf = lambda x: (1 - x / epochs) * (1 - lrf) + lrf # linear
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
+ # scheduler = lr_scheduler.OneCycleLR(optimizer, max_lr=lr0, total_steps=epochs, pct_start=0.1,
+ # final_div_factor=1 / 25 / lrf)
+
+ # EMA
+ ema = ModelEMA(model) if RANK in {-1, 0} else None
+
+ # DDP mode
+ if cuda and RANK != -1:
+ model = smart_DDP(model)
+
+ # Train
+ t0 = time.time()
+ criterion = nn.CrossEntropyLoss(label_smoothing=opt.label_smoothing) # loss function
+ best_fitness = 0.0
+ scaler = amp.GradScaler(enabled=cuda)
+ val = test_dir.stem # 'val' or 'test'
+ LOGGER.info(f'Image sizes {imgsz} train, {imgsz} test\n'
+ f'Using {nw * WORLD_SIZE} dataloader workers\n'
+ f"Logging results to {colorstr('bold', save_dir)}\n"
+ f'Starting training for {epochs} epochs...\n\n'
+ f"{'Epoch':>10}{'GPU_mem':>10}{'train_loss':>12}{f'{val}_loss':>12}{'top1_acc':>12}{'top5_acc':>12}")
+ for epoch in range(epochs): # loop over the dataset multiple times
+ tloss, vloss, fitness = 0.0, 0.0, 0.0 # train loss, val loss, fitness
+ model.train()
+ if RANK != -1:
+ trainloader.sampler.set_epoch(epoch)
+ pbar = enumerate(trainloader)
+ if RANK in {-1, 0}:
+ pbar = tqdm(enumerate(trainloader), total=len(trainloader), bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}')
+ for i, (images, labels) in pbar: # progress bar
+ images, labels = images.to(device, non_blocking=True), labels.to(device)
+
+ # Forward
+ with amp.autocast(enabled=cuda): # stability issues when enabled
+ loss = criterion(model(images), labels)
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize
+ scaler.unscale_(optimizer) # unscale gradients
+ torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=10.0) # clip gradients
+ scaler.step(optimizer)
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+
+ if RANK in {-1, 0}:
+ # Print
+ tloss = (tloss * i + loss.item()) / (i + 1) # update mean losses
+ mem = '%.3gG' % (torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0) # (GB)
+ pbar.desc = f"{f'{epoch + 1}/{epochs}':>10}{mem:>10}{tloss:>12.3g}" + ' ' * 36
+
+ # Test
+ if i == len(pbar) - 1: # last batch
+ top1, top5, vloss = test(ema.ema, testloader, names, criterion, pbar=pbar) # test accuracy, loss
+ fitness = top1 # define fitness as top1 accuracy
+
+ # Scheduler
+ scheduler.step()
+
+ # Log metrics
+ if RANK in {-1, 0}:
+ # Best fitness
+ if fitness > best_fitness:
+ best_fitness = fitness
+
+ # Log
+ metrics = {
+ "train/loss": tloss,
+ f"{val}/loss": vloss,
+ "metrics/accuracy_top1": top1,
+ "metrics/accuracy_top5": top5,
+ "lr/0": optimizer.param_groups[0]['lr']} # learning rate
+ logger.log_metrics(metrics, epoch)
+
+ # Save model
+ final_epoch = epoch + 1 == epochs
+ if (not opt.nosave) or final_epoch:
+ ckpt = {
+ 'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'model': deepcopy(ema.ema).half(), # deepcopy(de_parallel(model)).half(),
+ 'ema': None, # deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': None, # optimizer.state_dict(),
+ 'date': datetime.now().isoformat()}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fitness:
+ torch.save(ckpt, best)
+ del ckpt
+
+ # Train complete
+ if RANK in {-1, 0} and final_epoch:
+ LOGGER.info(f'\nTraining complete {(time.time() - t0) / 3600:.3f} hours.'
+ f"\nResults saved to {colorstr('bold', save_dir)}")
+
+ # Show predictions
+ images, labels = (x[:25] for x in next(iter(testloader))) # first 25 images and labels
+ pred = torch.max(ema.ema(images.to(device)), 1)[1]
+ file = imshow(denormalize(images), labels, pred, names, verbose=True, f=save_dir / 'test_images.jpg')
+ meta = {"epochs": epochs, "top1_acc": best_fitness, "date": datetime.now().isoformat()}
+ logger.log_images(file, name='Test Examples (true-predicted)', epoch=epoch)
+ logger.log_model(best, epochs, metadata=meta)
+
+
+@torch.no_grad()
+def test(model, dataloader, names, criterion=None, verbose=False, pbar=None):
+ model.eval()
+ device = next(model.parameters()).device
+ pred, targets, loss = [], [], 0
+ n = len(dataloader) # number of batches
+ action = 'validating' if dataloader.dataset.root.stem == 'val' else 'testing'
+ desc = f"{pbar.desc[:-36]}{action:>36}"
+ bar = tqdm(dataloader, desc, n, False, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}', position=0)
+ with amp.autocast(enabled=device.type != 'cpu'):
+ for images, labels in bar:
+ images, labels = images.to(device, non_blocking=True), labels.to(device)
+ y = model(images)
+ pred.append(y.argsort(1, descending=True)[:, :5])
+ targets.append(labels)
+ if criterion:
+ loss += criterion(y, labels)
+
+ loss /= n
+ pred, targets = torch.cat(pred), torch.cat(targets)
+ correct = (targets[:, None] == pred).float()
+ acc = torch.stack((correct[:, 0], correct.max(1).values), dim=1) # (top1, top5) accuracy
+ top1, top5 = acc.mean(0).tolist()
+
+ if pbar:
+ pbar.desc = f"{pbar.desc[:-36]}{loss:>12.3g}{top1:>12.3g}{top5:>12.3g}"
+ if verbose: # all classes
+ LOGGER.info(f"{'Class':>20}{'Images':>12}{'top1_acc':>12}{'top5_acc':>12}")
+ LOGGER.info(f"{'all':>20}{targets.shape[0]:>12}{top1:>12.3g}{top5:>12.3g}")
+ for i, c in enumerate(names):
+ aci = acc[targets == i]
+ top1i, top5i = aci.mean(0).tolist()
+ LOGGER.info(f"{c:>20}{aci.shape[0]:>12}{top1i:>12.3g}{top5i:>12.3g}")
+
+ return top1, top5, loss
+
+
+@torch.no_grad()
+def classify(model, size=128, file='../datasets/mnist/test/3/30.png', plot=False):
+ # YOLOv5 classification model inference
+ import cv2
+ import numpy as np
+ import torch.nn.functional as F
+
+ resize = torch.nn.Upsample(size=(size, size), mode='bilinear', align_corners=False) # image resize
+
+ # Image
+ im = cv2.imread(str(file))[..., ::-1] # HWC, BGR to RGB
+ im = np.ascontiguousarray(np.asarray(im).transpose((2, 0, 1))) # HWC to CHW
+ im = torch.tensor(im).float().unsqueeze(0) / 255.0 # to Tensor, to BCWH, rescale
+ im = resize(im)
+
+ # Inference
+ results = model(normalize(im))
+ p = F.softmax(results, dim=1) # probabilities
+ i = p.argmax() # max index
+ LOGGER.info(f'{file} prediction: {i} ({p[0, i]:.2f})')
+
+ # Plot
+ if plot:
+ imshow(im, f=Path(file).name)
+
+ return p
+
+
+def imshow(img, labels=None, pred=None, names=None, nmax=25, verbose=False, f=Path('images.jpg')):
+ # Show classification image grid with labels (optional) and predictions (optional)
+ import matplotlib.pyplot as plt
+
+ names = names or [f'class{i}' for i in range(1000)]
+ blocks = torch.chunk(img.cpu(), len(img), dim=0) # select batch index 0, block by channels
+ n = min(len(blocks), nmax) # number of plots
+ m = min(8, round(n ** 0.5)) # 8 x 8 default
+ fig, ax = plt.subplots(math.ceil(n / m), m) # 8 rows x n/8 cols
+ ax = ax.ravel() if m > 1 else [ax]
+ # plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze().permute((1, 2, 0)).numpy().clip(0.0, 1.0))
+ ax[i].axis('off')
+ if labels is not None:
+ s = names[labels[i]] + (f'—{names[pred[i]]}' if pred is not None else '')
+ ax[i].set_title(s, fontsize=8, verticalalignment='top')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ LOGGER.info(colorstr('imshow: ') + f"examples saved to {f}")
+ if verbose:
+ if labels is not None:
+ LOGGER.info('True: ' + ' '.join(f'{names[i]:3s}' for i in labels[:nmax]))
+ if pred is not None:
+ LOGGER.info('Predicted:' + ' '.join(f'{names[i]:3s}' for i in pred[:nmax]))
+ return f
+
+
+def parse_opt(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--model', type=str, default='yolov5s', help='initial weights path')
+ parser.add_argument('--data', type=str, default='mnist', help='cifar10, cifar100, mnist or fashion-mnist')
+ parser.add_argument('--epochs', type=int, default=90)
+ parser.add_argument('--batch-size', type=int, default=64, help='total batch size for all GPUs')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=224, help='train, val image size (pixels)')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default='runs/train', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--pretrained', nargs='?', const=True, default=True, help='start from i.e. --pretrained False')
+ parser.add_argument('--optimizer', choices=['SGD', 'Adam', 'AdamW', 'RMSProp'], default='Adam', help='optimizer')
+ parser.add_argument('--lr0', type=float, default=0.001, help='initial learning rate')
+ parser.add_argument('--label-smoothing', type=float, default=0.1, help='Label smoothing epsilon')
+ parser.add_argument('--cutoff', type=int, default=None, help='Model layer cutoff index for Classify() head')
+ parser.add_argument('--dropout', type=float, default=None, help='Dropout (fraction)')
+ parser.add_argument('--verbose', action='store_true', help='Verbose mode')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def main(opt):
+ # Checks
+ if RANK in {-1, 0}:
+ print_args(vars(opt))
+ #check_git_status()
+ #check_requirements()
+
+ # DDP mode
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if LOCAL_RANK != -1:
+ assert opt.batch_size != -1, 'AutoBatch is coming soon for classification, please pass a valid --batch-size'
+ assert opt.batch_size % WORLD_SIZE == 0, f'--batch-size {opt.batch_size} must be multiple of WORLD_SIZE'
+ assert torch.cuda.device_count() > LOCAL_RANK, 'insufficient CUDA devices for DDP command'
+ torch.cuda.set_device(LOCAL_RANK)
+ device = torch.device('cuda', LOCAL_RANK)
+ dist.init_process_group(backend="nccl" if dist.is_nccl_available() else "gloo")
+
+ # Parameters
+ opt.save_dir = increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok) # increment run
+
+ # Train
+ train(opt, device)
+ if WORLD_SIZE > 1 and RANK == 0:
+ LOGGER.info('Destroying process group... ')
+ dist.destroy_process_group()
+
+
+def run(**kwargs):
+ # Usage: import classifier; classifier.run(data=mnist, imgsz=320, model='yolov5m')
+ opt = parse_opt(True)
+ for k, v in kwargs.items():
+ setattr(opt, k, v)
+ main(opt)
+ return opt
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/cls/data/hyps/hyp.scratch-high.yaml b/yolov7_seg/cls/data/hyps/hyp.scratch-high.yaml
new file mode 100644
index 000000000..9ba0d0826
--- /dev/null
+++ b/yolov7_seg/cls/data/hyps/hyp.scratch-high.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for high-augmentation COCO training from scratch
+# python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.3 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 0.7 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.9 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.1 # image mixup (probability)
+copy_paste: 0.1 # segment copy-paste (probability)
diff --git a/yolov7_seg/cls/data/hyps/hyp.scratch-low.yaml b/yolov7_seg/cls/data/hyps/hyp.scratch-low.yaml
new file mode 100644
index 000000000..dcf0f6495
--- /dev/null
+++ b/yolov7_seg/cls/data/hyps/hyp.scratch-low.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for low-augmentation COCO training from scratch
+# python train.py --batch 64 --cfg yolov5n6.yaml --weights '' --data coco.yaml --img 640 --epochs 300 --linear
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.01 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.5 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 1.0 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.5 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.0 # image mixup (probability)
+copy_paste: 0.0 # segment copy-paste (probability)
diff --git a/yolov7_seg/cls/data/hyps/hyp.scratch-med.yaml b/yolov7_seg/cls/data/hyps/hyp.scratch-med.yaml
new file mode 100644
index 000000000..6dcfc2dc1
--- /dev/null
+++ b/yolov7_seg/cls/data/hyps/hyp.scratch-med.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for medium-augmentation COCO training from scratch
+# python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.3 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 0.7 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.9 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.1 # image mixup (probability)
+copy_paste: 0.0 # segment copy-paste (probability)
diff --git a/yolov7_seg/cls/data/scripts/get_coco.sh b/yolov7_seg/cls/data/scripts/get_coco.sh
new file mode 100644
index 000000000..be3cae83f
--- /dev/null
+++ b/yolov7_seg/cls/data/scripts/get_coco.sh
@@ -0,0 +1,27 @@
+#!/bin/bash
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Download COCO 2017 dataset http://cocodataset.org
+# Example usage: bash data/scripts/get_coco.sh
+# parent
+# ├── yolov5
+# └── datasets
+# └── coco ← downloads here
+
+# Download/unzip labels
+d='../datasets' # unzip directory
+url=https://github.com/ultralytics/yolov5/releases/download/v1.0/
+f='coco2017labels.zip' # or 'coco2017labels-segments.zip', 68 MB
+echo 'Downloading' $url$f ' ...'
+curl -L $url$f -o $f && unzip -q $f -d $d && rm $f &
+
+# Download/unzip images
+d='../datasets/coco/images' # unzip directory
+url=http://images.cocodataset.org/zips/
+f1='train2017.zip' # 19G, 118k images
+f2='val2017.zip' # 1G, 5k images
+f3='test2017.zip' # 7G, 41k images (optional)
+for f in $f1 $f2; do
+ echo 'Downloading' $url$f '...'
+ curl -L $url$f -o $f && unzip -q $f -d $d && rm $f &
+done
+wait # finish background tasks
diff --git a/yolov7_seg/cls/data/scripts/get_imagenet.sh b/yolov7_seg/cls/data/scripts/get_imagenet.sh
new file mode 100644
index 000000000..655eaf5fe
--- /dev/null
+++ b/yolov7_seg/cls/data/scripts/get_imagenet.sh
@@ -0,0 +1,34 @@
+#!/bin/bash
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Download ILSVRC2012 ImageNet dataset https://image-net.org
+# Example usage: bash data/scripts/get_imagenet.sh
+# parent
+# ├── yolov5
+# └── datasets
+# └── imagenet ← downloads here
+
+# Download
+d='../datasets/imagenet' # unzip directory
+mkdir -p $d && cd $d
+wget https://image-net.org/data/ILSVRC/2012/ILSVRC2012_img_val.tar # 6.3G, 50000 images
+wget https://image-net.org/data/ILSVRC/2012/ILSVRC2012_img_train.tar # 138G, 1281167 images
+
+# Extract train
+mkdir train && mv ILSVRC2012_img_train.tar train/ && cd train
+tar -xvf ILSVRC2012_img_train.tar && rm -f ILSVRC2012_img_train.tar
+find . -name "*.tar" | while read NAME; do
+ mkdir -p "${NAME%.tar}"
+ tar -xvf "${NAME}" -C "${NAME%.tar}"
+ rm -f "${NAME}"
+done
+cd ..
+
+# Extract val and move images into subdirectories
+mkdir val && mv ILSVRC2012_img_val.tar val/ && cd val && tar -xvf ILSVRC2012_img_val.tar
+wget -qO- https://raw.githubusercontent.com/soumith/imagenetloader.torch/master/valprep.sh | bash
+
+# Delete corrupted image (optional: PNG under JPEG name that may cause dataloaders to fail)
+# rm train/n04266014/n04266014_10835.JPEG
+
+# TFRecords (optional)
+# wget https://raw.githubusercontent.com/tensorflow/models/master/research/slim/datasets/imagenet_lsvrc_2015_synsets.txt
diff --git a/yolov7_seg/cls/detect.py b/yolov7_seg/cls/detect.py
new file mode 100644
index 000000000..dfd70933c
--- /dev/null
+++ b/yolov7_seg/cls/detect.py
@@ -0,0 +1,257 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run inference on images, videos, directories, streams, etc.
+
+Usage - sources:
+ $ python path/to/detect.py --weights yolov5s.pt --source 0 # webcam
+ img.jpg # image
+ vid.mp4 # video
+ path/ # directory
+ path/*.jpg # glob
+ 'https://youtu.be/Zgi9g1ksQHc' # YouTube
+ 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
+
+Usage - formats:
+ $ python path/to/detect.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import os
+import platform
+import sys
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.dataloaders import IMG_FORMATS, VID_FORMATS, LoadImages, LoadStreams
+from utils.general import (LOGGER, check_file, check_img_size, check_imshow, check_requirements, colorstr, cv2,
+ increment_path, non_max_suppression, print_args, scale_coords, strip_optimizer, xyxy2xywh)
+from utils.plots import Annotator, colors, save_one_box
+from utils.torch_utils import select_device, time_sync
+
+
+@torch.no_grad()
+def run(
+ weights=ROOT / 'yolov5s.pt', # model.pt path(s)
+ source=ROOT / 'data/images', # file/dir/URL/glob, 0 for webcam
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ imgsz=(640, 640), # inference size (height, width)
+ conf_thres=0.25, # confidence threshold
+ iou_thres=0.45, # NMS IOU threshold
+ max_det=1000, # maximum detections per image
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ view_img=False, # show results
+ save_txt=False, # save results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_crop=False, # save cropped prediction boxes
+ nosave=False, # do not save images/videos
+ classes=None, # filter by class: --class 0, or --class 0 2 3
+ agnostic_nms=False, # class-agnostic NMS
+ augment=False, # augmented inference
+ visualize=False, # visualize features
+ update=False, # update all models
+ project=ROOT / 'runs/detect', # save results to project/name
+ name='exp', # save results to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ line_thickness=3, # bounding box thickness (pixels)
+ hide_labels=False, # hide labels
+ hide_conf=False, # hide confidences
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+):
+ source = str(source)
+ save_img = not nosave and not source.endswith('.txt') # save inference images
+ is_file = Path(source).suffix[1:] in (IMG_FORMATS + VID_FORMATS)
+ is_url = source.lower().startswith(('rtsp://', 'rtmp://', 'http://', 'https://'))
+ webcam = source.isnumeric() or source.endswith('.txt') or (is_url and not is_file)
+ if is_url and is_file:
+ source = check_file(source) # download
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ device = select_device(device)
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, names, pt = model.stride, model.names, model.pt
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+
+ # Dataloader
+ if webcam:
+ view_img = check_imshow()
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride, auto=pt)
+ bs = len(dataset) # batch_size
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt)
+ bs = 1 # batch_size
+ vid_path, vid_writer = [None] * bs, [None] * bs
+
+ # Run inference
+ model.warmup(imgsz=(1 if pt else bs, 3, *imgsz)) # warmup
+ seen, windows, dt = 0, [], [0.0, 0.0, 0.0]
+ for path, im, im0s, vid_cap, s in dataset:
+ t1 = time_sync()
+ im = torch.from_numpy(im).to(device)
+ im = im.half() if model.fp16 else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ if len(im.shape) == 3:
+ im = im[None] # expand for batch dim
+ t2 = time_sync()
+ dt[0] += t2 - t1
+
+ # Inference
+ visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False
+ pred = model(im, augment=augment, visualize=visualize)
+ t3 = time_sync()
+ dt[1] += t3 - t2
+
+ # NMS
+ pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det)
+ dt[2] += time_sync() - t3
+
+ # Second-stage classifier (optional)
+ # pred = utils.general.apply_classifier(pred, classifier_model, im, im0s)
+
+ # Process predictions
+ for i, det in enumerate(pred): # per image
+ seen += 1
+ if webcam: # batch_size >= 1
+ p, im0, frame = path[i], im0s[i].copy(), dataset.count
+ s += f'{i}: '
+ else:
+ p, im0, frame = path, im0s.copy(), getattr(dataset, 'frame', 0)
+
+ p = Path(p) # to Path
+ save_path = str(save_dir / p.name) # im.jpg
+ txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # im.txt
+ s += '%gx%g ' % im.shape[2:] # print string
+ gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
+ imc = im0.copy() if save_crop else im0 # for save_crop
+ annotator = Annotator(im0, line_width=line_thickness, example=str(names))
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(im.shape[2:], det[:, :4], im0.shape).round()
+
+ # Print results
+ for c in det[:, -1].unique():
+ n = (det[:, -1] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ if save_txt: # Write to file
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(f'{txt_path}.txt', 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+ if save_img or save_crop or view_img: # Add bbox to image
+ c = int(cls) # integer class
+ label = None if hide_labels else (names[c] if hide_conf else f'{names[c]} {conf:.2f}')
+ annotator.box_label(xyxy, label, color=colors(c, True))
+ if save_crop:
+ save_one_box(xyxy, imc, file=save_dir / 'crops' / names[c] / f'{p.stem}.jpg', BGR=True)
+
+ # Stream results
+ im0 = annotator.result()
+ if view_img:
+ if platform.system() == 'Linux' and p not in windows:
+ windows.append(p)
+ cv2.namedWindow(str(p), cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO) # allow window resize (Linux)
+ cv2.resizeWindow(str(p), im0.shape[1], im0.shape[0])
+ cv2.imshow(str(p), im0)
+ cv2.waitKey(1) # 1 millisecond
+
+ # Save results (image with detections)
+ if save_img:
+ if dataset.mode == 'image':
+ cv2.imwrite(save_path, im0)
+ else: # 'video' or 'stream'
+ if vid_path[i] != save_path: # new video
+ vid_path[i] = save_path
+ if isinstance(vid_writer[i], cv2.VideoWriter):
+ vid_writer[i].release() # release previous video writer
+ if vid_cap: # video
+ fps = vid_cap.get(cv2.CAP_PROP_FPS)
+ w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ else: # stream
+ fps, w, h = 30, im0.shape[1], im0.shape[0]
+ save_path = str(Path(save_path).with_suffix('.mp4')) # force *.mp4 suffix on results videos
+ vid_writer[i] = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
+ vid_writer[i].write(im0)
+
+ # Print time (inference-only)
+ LOGGER.info(f'{s}Done. ({t3 - t2:.3f}s)')
+
+ # Print results
+ t = tuple(x / seen * 1E3 for x in dt) # speeds per image
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {(1, 3, *imgsz)}' % t)
+ if save_txt or save_img:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ if update:
+ strip_optimizer(weights[0]) # update model (to fix SourceChangeWarning)
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)')
+ parser.add_argument('--source', type=str, default=ROOT / 'data/images', help='file/dir/URL/glob, 0 for webcam')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='(optional) dataset.yaml path')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=1000, help='maximum detections per image')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--view-img', action='store_true', help='show results')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-crop', action='store_true', help='save cropped prediction boxes')
+ parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
+ parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --classes 0, or --classes 0 2 3')
+ parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--visualize', action='store_true', help='visualize features')
+ parser.add_argument('--update', action='store_true', help='update all models')
+ parser.add_argument('--project', default=ROOT / 'runs/detect', help='save results to project/name')
+ parser.add_argument('--name', default='exp', help='save results to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--line-thickness', default=3, type=int, help='bounding box thickness (pixels)')
+ parser.add_argument('--hide-labels', default=False, action='store_true', help='hide labels')
+ parser.add_argument('--hide-conf', default=False, action='store_true', help='hide confidences')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/cls/export.py b/yolov7_seg/cls/export.py
new file mode 100644
index 000000000..ea5702e02
--- /dev/null
+++ b/yolov7_seg/cls/export.py
@@ -0,0 +1,618 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Export a YOLOv5 PyTorch model to other formats. TensorFlow exports authored by https://github.com/zldrobit
+
+Format | `export.py --include` | Model
+--- | --- | ---
+PyTorch | - | yolov5s.pt
+TorchScript | `torchscript` | yolov5s.torchscript
+ONNX | `onnx` | yolov5s.onnx
+OpenVINO | `openvino` | yolov5s_openvino_model/
+TensorRT | `engine` | yolov5s.engine
+CoreML | `coreml` | yolov5s.mlmodel
+TensorFlow SavedModel | `saved_model` | yolov5s_saved_model/
+TensorFlow GraphDef | `pb` | yolov5s.pb
+TensorFlow Lite | `tflite` | yolov5s.tflite
+TensorFlow Edge TPU | `edgetpu` | yolov5s_edgetpu.tflite
+TensorFlow.js | `tfjs` | yolov5s_web_model/
+
+Requirements:
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu # CPU
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime-gpu openvino-dev tensorflow # GPU
+
+Usage:
+ $ python path/to/export.py --weights yolov5s.pt --include torchscript onnx openvino engine coreml tflite ...
+
+Inference:
+ $ python path/to/detect.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+
+TensorFlow.js:
+ $ cd .. && git clone https://github.com/zldrobit/tfjs-yolov5-example.git && cd tfjs-yolov5-example
+ $ npm install
+ $ ln -s ../../yolov5/yolov5s_web_model public/yolov5s_web_model
+ $ npm start
+"""
+
+import argparse
+import json
+import os
+import platform
+import subprocess
+import sys
+import time
+import warnings
+from pathlib import Path
+
+import pandas as pd
+import torch
+import yaml
+from torch.utils.mobile_optimizer import optimize_for_mobile
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+if platform.system() != 'Windows':
+ ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.experimental import attempt_load
+from models.yolo import Detect
+from utils.dataloaders import LoadImages
+from utils.general import (LOGGER, check_dataset, check_img_size, check_requirements, check_version, check_yaml,
+ colorstr, file_size, print_args, url2file)
+from utils.torch_utils import select_device
+
+
+def export_formats():
+ # YOLOv5 export formats
+ x = [
+ ['PyTorch', '-', '.pt', True, True],
+ ['TorchScript', 'torchscript', '.torchscript', True, True],
+ ['ONNX', 'onnx', '.onnx', True, True],
+ ['OpenVINO', 'openvino', '_openvino_model', True, False],
+ ['TensorRT', 'engine', '.engine', False, True],
+ ['CoreML', 'coreml', '.mlmodel', True, False],
+ ['TensorFlow SavedModel', 'saved_model', '_saved_model', True, True],
+ ['TensorFlow GraphDef', 'pb', '.pb', True, True],
+ ['TensorFlow Lite', 'tflite', '.tflite', True, False],
+ ['TensorFlow Edge TPU', 'edgetpu', '_edgetpu.tflite', False, False],
+ ['TensorFlow.js', 'tfjs', '_web_model', False, False],]
+ return pd.DataFrame(x, columns=['Format', 'Argument', 'Suffix', 'CPU', 'GPU'])
+
+
+def export_torchscript(model, im, file, optimize, prefix=colorstr('TorchScript:')):
+ # YOLOv5 TorchScript model export
+ try:
+ LOGGER.info(f'\n{prefix} starting export with torch {torch.__version__}...')
+ f = file.with_suffix('.torchscript')
+
+ ts = torch.jit.trace(model, im, strict=False)
+ d = {"shape": im.shape, "stride": int(max(model.stride)), "names": model.names}
+ extra_files = {'config.txt': json.dumps(d)} # torch._C.ExtraFilesMap()
+ if optimize: # https://pytorch.org/tutorials/recipes/mobile_interpreter.html
+ optimize_for_mobile(ts)._save_for_lite_interpreter(str(f), _extra_files=extra_files)
+ else:
+ ts.save(str(f), _extra_files=extra_files)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'{prefix} export failure: {e}')
+
+
+def export_onnx(model, im, file, opset, train, dynamic, simplify, prefix=colorstr('ONNX:')):
+ # YOLOv5 ONNX export
+ try:
+ check_requirements(('onnx',))
+ import onnx
+
+ LOGGER.info(f'\n{prefix} starting export with onnx {onnx.__version__}...')
+ f = file.with_suffix('.onnx')
+
+ torch.onnx.export(
+ model.cpu() if dynamic else model, # --dynamic only compatible with cpu
+ im.cpu() if dynamic else im,
+ f,
+ verbose=False,
+ opset_version=opset,
+ training=torch.onnx.TrainingMode.TRAINING if train else torch.onnx.TrainingMode.EVAL,
+ do_constant_folding=not train,
+ input_names=['images'],
+ output_names=['output'],
+ dynamic_axes={
+ 'images': {
+ 0: 'batch',
+ 2: 'height',
+ 3: 'width'}, # shape(1,3,640,640)
+ 'output': {
+ 0: 'batch',
+ 1: 'anchors'} # shape(1,25200,85)
+ } if dynamic else None)
+
+ # Checks
+ model_onnx = onnx.load(f) # load onnx model
+ onnx.checker.check_model(model_onnx) # check onnx model
+
+ # Metadata
+ d = {'stride': int(max(model.stride)), 'names': model.names}
+ for k, v in d.items():
+ meta = model_onnx.metadata_props.add()
+ meta.key, meta.value = k, str(v)
+ onnx.save(model_onnx, f)
+
+ # Simplify
+ if simplify:
+ try:
+ cuda = torch.cuda.is_available()
+ check_requirements(('onnxruntime-gpu' if cuda else 'onnxruntime', 'onnx-simplifier>=0.4.1'))
+ import onnxsim
+
+ LOGGER.info(f'{prefix} simplifying with onnx-simplifier {onnxsim.__version__}...')
+ model_onnx, check = onnxsim.simplify(model_onnx)
+ assert check, 'assert check failed'
+ onnx.save(model_onnx, f)
+ except Exception as e:
+ LOGGER.info(f'{prefix} simplifier failure: {e}')
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'{prefix} export failure: {e}')
+
+
+def export_openvino(model, file, half, prefix=colorstr('OpenVINO:')):
+ # YOLOv5 OpenVINO export
+ try:
+ check_requirements(('openvino-dev',)) # requires openvino-dev: https://pypi.org/project/openvino-dev/
+ import openvino.inference_engine as ie
+
+ LOGGER.info(f'\n{prefix} starting export with openvino {ie.__version__}...')
+ f = str(file).replace('.pt', f'_openvino_model{os.sep}')
+
+ cmd = f"mo --input_model {file.with_suffix('.onnx')} --output_dir {f} --data_type {'FP16' if half else 'FP32'}"
+ subprocess.check_output(cmd.split()) # export
+ with open(Path(f) / file.with_suffix('.yaml').name, 'w') as g:
+ yaml.dump({'stride': int(max(model.stride)), 'names': model.names}, g) # add metadata.yaml
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_coreml(model, im, file, int8, half, prefix=colorstr('CoreML:')):
+ # YOLOv5 CoreML export
+ try:
+ check_requirements(('coremltools',))
+ import coremltools as ct
+
+ LOGGER.info(f'\n{prefix} starting export with coremltools {ct.__version__}...')
+ f = file.with_suffix('.mlmodel')
+
+ ts = torch.jit.trace(model, im, strict=False) # TorchScript model
+ ct_model = ct.convert(ts, inputs=[ct.ImageType('image', shape=im.shape, scale=1 / 255, bias=[0, 0, 0])])
+ bits, mode = (8, 'kmeans_lut') if int8 else (16, 'linear') if half else (32, None)
+ if bits < 32:
+ if platform.system() == 'Darwin': # quantization only supported on macOS
+ with warnings.catch_warnings():
+ warnings.filterwarnings("ignore", category=DeprecationWarning) # suppress numpy==1.20 float warning
+ ct_model = ct.models.neural_network.quantization_utils.quantize_weights(ct_model, bits, mode)
+ else:
+ print(f'{prefix} quantization only supported on macOS, skipping...')
+ ct_model.save(f)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return ct_model, f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+ return None, None
+
+
+def export_engine(model, im, file, train, half, dynamic, simplify, workspace=4, verbose=False):
+ # YOLOv5 TensorRT export https://developer.nvidia.com/tensorrt
+ prefix = colorstr('TensorRT:')
+ try:
+ assert im.device.type != 'cpu', 'export running on CPU but must be on GPU, i.e. `python export.py --device 0`'
+ try:
+ import tensorrt as trt
+ except Exception:
+ if platform.system() == 'Linux':
+ check_requirements(('nvidia-tensorrt',), cmds=('-U --index-url https://pypi.ngc.nvidia.com',))
+ import tensorrt as trt
+
+ if trt.__version__[0] == '7': # TensorRT 7 handling https://github.com/ultralytics/yolov5/issues/6012
+ grid = model.model[-1].anchor_grid
+ model.model[-1].anchor_grid = [a[..., :1, :1, :] for a in grid]
+ export_onnx(model, im, file, 12, train, dynamic, simplify) # opset 12
+ model.model[-1].anchor_grid = grid
+ else: # TensorRT >= 8
+ check_version(trt.__version__, '8.0.0', hard=True) # require tensorrt>=8.0.0
+ export_onnx(model, im, file, 13, train, dynamic, simplify) # opset 13
+ onnx = file.with_suffix('.onnx')
+
+ LOGGER.info(f'\n{prefix} starting export with TensorRT {trt.__version__}...')
+ assert onnx.exists(), f'failed to export ONNX file: {onnx}'
+ f = file.with_suffix('.engine') # TensorRT engine file
+ logger = trt.Logger(trt.Logger.INFO)
+ if verbose:
+ logger.min_severity = trt.Logger.Severity.VERBOSE
+
+ builder = trt.Builder(logger)
+ config = builder.create_builder_config()
+ config.max_workspace_size = workspace * 1 << 30
+ # config.set_memory_pool_limit(trt.MemoryPoolType.WORKSPACE, workspace << 30) # fix TRT 8.4 deprecation notice
+
+ flag = (1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH))
+ network = builder.create_network(flag)
+ parser = trt.OnnxParser(network, logger)
+ if not parser.parse_from_file(str(onnx)):
+ raise RuntimeError(f'failed to load ONNX file: {onnx}')
+
+ inputs = [network.get_input(i) for i in range(network.num_inputs)]
+ outputs = [network.get_output(i) for i in range(network.num_outputs)]
+ LOGGER.info(f'{prefix} Network Description:')
+ for inp in inputs:
+ LOGGER.info(f'{prefix}\tinput "{inp.name}" with shape {inp.shape} and dtype {inp.dtype}')
+ for out in outputs:
+ LOGGER.info(f'{prefix}\toutput "{out.name}" with shape {out.shape} and dtype {out.dtype}')
+
+ if dynamic:
+ if im.shape[0] <= 1:
+ LOGGER.warning(f"{prefix}WARNING: --dynamic model requires maximum --batch-size argument")
+ profile = builder.create_optimization_profile()
+ for inp in inputs:
+ profile.set_shape(inp.name, (1, *im.shape[1:]), (max(1, im.shape[0] // 2), *im.shape[1:]), im.shape)
+ config.add_optimization_profile(profile)
+
+ LOGGER.info(f'{prefix} building FP{16 if builder.platform_has_fast_fp16 and half else 32} engine in {f}')
+ if builder.platform_has_fast_fp16 and half:
+ config.set_flag(trt.BuilderFlag.FP16)
+ with builder.build_engine(network, config) as engine, open(f, 'wb') as t:
+ t.write(engine.serialize())
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_saved_model(model,
+ im,
+ file,
+ dynamic,
+ tf_nms=False,
+ agnostic_nms=False,
+ topk_per_class=100,
+ topk_all=100,
+ iou_thres=0.45,
+ conf_thres=0.25,
+ keras=False,
+ prefix=colorstr('TensorFlow SavedModel:')):
+ # YOLOv5 TensorFlow SavedModel export
+ try:
+ import tensorflow as tf
+ from tensorflow.python.framework.convert_to_constants import convert_variables_to_constants_v2
+
+ from models.tf import TFDetect, TFModel
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ f = str(file).replace('.pt', '_saved_model')
+ batch_size, ch, *imgsz = list(im.shape) # BCHW
+
+ tf_model = TFModel(cfg=model.yaml, model=model, nc=model.nc, imgsz=imgsz)
+ im = tf.zeros((batch_size, *imgsz, ch)) # BHWC order for TensorFlow
+ _ = tf_model.predict(im, tf_nms, agnostic_nms, topk_per_class, topk_all, iou_thres, conf_thres)
+ inputs = tf.keras.Input(shape=(*imgsz, ch), batch_size=None if dynamic else batch_size)
+ outputs = tf_model.predict(inputs, tf_nms, agnostic_nms, topk_per_class, topk_all, iou_thres, conf_thres)
+ keras_model = tf.keras.Model(inputs=inputs, outputs=outputs)
+ keras_model.trainable = False
+ keras_model.summary()
+ if keras:
+ keras_model.save(f, save_format='tf')
+ else:
+ spec = tf.TensorSpec(keras_model.inputs[0].shape, keras_model.inputs[0].dtype)
+ m = tf.function(lambda x: keras_model(x)) # full model
+ m = m.get_concrete_function(spec)
+ frozen_func = convert_variables_to_constants_v2(m)
+ tfm = tf.Module()
+ tfm.__call__ = tf.function(lambda x: frozen_func(x)[:4] if tf_nms else frozen_func(x)[0], [spec])
+ tfm.__call__(im)
+ tf.saved_model.save(tfm,
+ f,
+ options=tf.saved_model.SaveOptions(experimental_custom_gradients=False)
+ if check_version(tf.__version__, '2.6') else tf.saved_model.SaveOptions())
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return keras_model, f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+ return None, None
+
+
+def export_pb(keras_model, file, prefix=colorstr('TensorFlow GraphDef:')):
+ # YOLOv5 TensorFlow GraphDef *.pb export https://github.com/leimao/Frozen_Graph_TensorFlow
+ try:
+ import tensorflow as tf
+ from tensorflow.python.framework.convert_to_constants import convert_variables_to_constants_v2
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ f = file.with_suffix('.pb')
+
+ m = tf.function(lambda x: keras_model(x)) # full model
+ m = m.get_concrete_function(tf.TensorSpec(keras_model.inputs[0].shape, keras_model.inputs[0].dtype))
+ frozen_func = convert_variables_to_constants_v2(m)
+ frozen_func.graph.as_graph_def()
+ tf.io.write_graph(graph_or_graph_def=frozen_func.graph, logdir=str(f.parent), name=f.name, as_text=False)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_tflite(keras_model, im, file, int8, data, nms, agnostic_nms, prefix=colorstr('TensorFlow Lite:')):
+ # YOLOv5 TensorFlow Lite export
+ try:
+ import tensorflow as tf
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ batch_size, ch, *imgsz = list(im.shape) # BCHW
+ f = str(file).replace('.pt', '-fp16.tflite')
+
+ converter = tf.lite.TFLiteConverter.from_keras_model(keras_model)
+ converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS]
+ converter.target_spec.supported_types = [tf.float16]
+ converter.optimizations = [tf.lite.Optimize.DEFAULT]
+ if int8:
+ from models.tf import representative_dataset_gen
+ dataset = LoadImages(check_dataset(check_yaml(data))['train'], img_size=imgsz, auto=False)
+ converter.representative_dataset = lambda: representative_dataset_gen(dataset, ncalib=100)
+ converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS_INT8]
+ converter.target_spec.supported_types = []
+ converter.inference_input_type = tf.uint8 # or tf.int8
+ converter.inference_output_type = tf.uint8 # or tf.int8
+ converter.experimental_new_quantizer = True
+ f = str(file).replace('.pt', '-int8.tflite')
+ if nms or agnostic_nms:
+ converter.target_spec.supported_ops.append(tf.lite.OpsSet.SELECT_TF_OPS)
+
+ tflite_model = converter.convert()
+ open(f, "wb").write(tflite_model)
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_edgetpu(file, prefix=colorstr('Edge TPU:')):
+ # YOLOv5 Edge TPU export https://coral.ai/docs/edgetpu/models-intro/
+ try:
+ cmd = 'edgetpu_compiler --version'
+ help_url = 'https://coral.ai/docs/edgetpu/compiler/'
+ assert platform.system() == 'Linux', f'export only supported on Linux. See {help_url}'
+ if subprocess.run(f'{cmd} >/dev/null', shell=True).returncode != 0:
+ LOGGER.info(f'\n{prefix} export requires Edge TPU compiler. Attempting install from {help_url}')
+ sudo = subprocess.run('sudo --version >/dev/null', shell=True).returncode == 0 # sudo installed on system
+ for c in (
+ 'curl https://packages.cloud.google.com/apt/doc/apt-key.gpg | sudo apt-key add -',
+ 'echo "deb https://packages.cloud.google.com/apt coral-edgetpu-stable main" | sudo tee /etc/apt/sources.list.d/coral-edgetpu.list',
+ 'sudo apt-get update', 'sudo apt-get install edgetpu-compiler'):
+ subprocess.run(c if sudo else c.replace('sudo ', ''), shell=True, check=True)
+ ver = subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1]
+
+ LOGGER.info(f'\n{prefix} starting export with Edge TPU compiler {ver}...')
+ f = str(file).replace('.pt', '-int8_edgetpu.tflite') # Edge TPU model
+ f_tfl = str(file).replace('.pt', '-int8.tflite') # TFLite model
+
+ cmd = f"edgetpu_compiler -s -o {file.parent} {f_tfl}"
+ subprocess.run(cmd.split(), check=True)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_tfjs(file, prefix=colorstr('TensorFlow.js:')):
+ # YOLOv5 TensorFlow.js export
+ try:
+ check_requirements(('tensorflowjs',))
+ import re
+
+ import tensorflowjs as tfjs
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflowjs {tfjs.__version__}...')
+ f = str(file).replace('.pt', '_web_model') # js dir
+ f_pb = file.with_suffix('.pb') # *.pb path
+ f_json = f'{f}/model.json' # *.json path
+
+ cmd = f'tensorflowjs_converter --input_format=tf_frozen_model ' \
+ f'--output_node_names=Identity,Identity_1,Identity_2,Identity_3 {f_pb} {f}'
+ subprocess.run(cmd.split())
+
+ with open(f_json) as j:
+ json = j.read()
+ with open(f_json, 'w') as j: # sort JSON Identity_* in ascending order
+ subst = re.sub(
+ r'{"outputs": {"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}}}', r'{"outputs": {"Identity": {"name": "Identity"}, '
+ r'"Identity_1": {"name": "Identity_1"}, '
+ r'"Identity_2": {"name": "Identity_2"}, '
+ r'"Identity_3": {"name": "Identity_3"}}}', json)
+ j.write(subst)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+@torch.no_grad()
+def run(
+ data=ROOT / 'data/coco128.yaml', # 'dataset.yaml path'
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=(640, 640), # image (height, width)
+ batch_size=1, # batch size
+ device='cpu', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ include=('torchscript', 'onnx'), # include formats
+ half=False, # FP16 half-precision export
+ inplace=False, # set YOLOv5 Detect() inplace=True
+ train=False, # model.train() mode
+ keras=False, # use Keras
+ optimize=False, # TorchScript: optimize for mobile
+ int8=False, # CoreML/TF INT8 quantization
+ dynamic=False, # ONNX/TF/TensorRT: dynamic axes
+ simplify=False, # ONNX: simplify model
+ opset=12, # ONNX: opset version
+ verbose=False, # TensorRT: verbose log
+ workspace=4, # TensorRT: workspace size (GB)
+ nms=False, # TF: add NMS to model
+ agnostic_nms=False, # TF: add agnostic NMS to model
+ topk_per_class=100, # TF.js NMS: topk per class to keep
+ topk_all=100, # TF.js NMS: topk for all classes to keep
+ iou_thres=0.45, # TF.js NMS: IoU threshold
+ conf_thres=0.25, # TF.js NMS: confidence threshold
+):
+ t = time.time()
+ include = [x.lower() for x in include] # to lowercase
+ fmts = tuple(export_formats()['Argument'][1:]) # --include arguments
+ flags = [x in include for x in fmts]
+ assert sum(flags) == len(include), f'ERROR: Invalid --include {include}, valid --include arguments are {fmts}'
+ jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs = flags # export booleans
+ file = Path(url2file(weights) if str(weights).startswith(('http:/', 'https:/')) else weights) # PyTorch weights
+
+ # Load PyTorch model
+ device = select_device(device)
+ if half:
+ assert device.type != 'cpu' or coreml, '--half only compatible with GPU export, i.e. use --device 0'
+ assert not dynamic, '--half not compatible with --dynamic, i.e. use either --half or --dynamic but not both'
+ model = attempt_load(weights, device=device, inplace=True, fuse=True) # load FP32 model
+ nc, names = model.nc, model.names # number of classes, class names
+
+ # Checks
+ imgsz *= 2 if len(imgsz) == 1 else 1 # expand
+ assert nc == len(names), f'Model class count {nc} != len(names) {len(names)}'
+ if optimize:
+ assert device.type == 'cpu', '--optimize not compatible with cuda devices, i.e. use --device cpu'
+
+ # Input
+ gs = int(max(model.stride)) # grid size (max stride)
+ imgsz = [check_img_size(x, gs) for x in imgsz] # verify img_size are gs-multiples
+ im = torch.zeros(batch_size, 3, *imgsz).to(device) # image size(1,3,320,192) BCHW iDetection
+
+ # Update model
+ model.train() if train else model.eval() # training mode = no Detect() layer grid construction
+ for k, m in model.named_modules():
+ if isinstance(m, Detect):
+ m.inplace = inplace
+ m.onnx_dynamic = dynamic
+ m.export = True
+
+ for _ in range(2):
+ y = model(im) # dry runs
+ if half and not coreml:
+ im, model = im.half(), model.half() # to FP16
+ shape = tuple(y[0].shape) # model output shape
+ LOGGER.info(f"\n{colorstr('PyTorch:')} starting from {file} with output shape {shape} ({file_size(file):.1f} MB)")
+
+ # Exports
+ f = [''] * 10 # exported filenames
+ warnings.filterwarnings(action='ignore', category=torch.jit.TracerWarning) # suppress TracerWarning
+ if jit:
+ f[0] = export_torchscript(model, im, file, optimize)
+ if engine: # TensorRT required before ONNX
+ f[1] = export_engine(model, im, file, train, half, dynamic, simplify, workspace, verbose)
+ if onnx or xml: # OpenVINO requires ONNX
+ f[2] = export_onnx(model, im, file, opset, train, dynamic, simplify)
+ if xml: # OpenVINO
+ f[3] = export_openvino(model, file, half)
+ if coreml:
+ _, f[4] = export_coreml(model, im, file, int8, half)
+
+ # TensorFlow Exports
+ if any((saved_model, pb, tflite, edgetpu, tfjs)):
+ if int8 or edgetpu: # TFLite --int8 bug https://github.com/ultralytics/yolov5/issues/5707
+ check_requirements(('flatbuffers==1.12',)) # required before `import tensorflow`
+ assert not tflite or not tfjs, 'TFLite and TF.js models must be exported separately, please pass only one type.'
+ model, f[5] = export_saved_model(model.cpu(),
+ im,
+ file,
+ dynamic,
+ tf_nms=nms or agnostic_nms or tfjs,
+ agnostic_nms=agnostic_nms or tfjs,
+ topk_per_class=topk_per_class,
+ topk_all=topk_all,
+ iou_thres=iou_thres,
+ conf_thres=conf_thres,
+ keras=keras)
+ if pb or tfjs: # pb prerequisite to tfjs
+ f[6] = export_pb(model, file)
+ if tflite or edgetpu:
+ f[7] = export_tflite(model, im, file, int8=int8 or edgetpu, data=data, nms=nms, agnostic_nms=agnostic_nms)
+ if edgetpu:
+ f[8] = export_edgetpu(file)
+ if tfjs:
+ f[9] = export_tfjs(file)
+
+ # Finish
+ f = [str(x) for x in f if x] # filter out '' and None
+ if any(f):
+ h = '--half' if half else '' # --half FP16 inference arg
+ LOGGER.info(f'\nExport complete ({time.time() - t:.2f}s)'
+ f"\nResults saved to {colorstr('bold', file.parent.resolve())}"
+ f"\nDetect: python detect.py --weights {f[-1]} {h}"
+ f"\nValidate: python val.py --weights {f[-1]} {h}"
+ f"\nPyTorch Hub: model = torch.hub.load('ultralytics/yolov5', 'custom', '{f[-1]}')"
+ f"\nVisualize: https://netron.app")
+ return f # return list of exported files/dirs
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model.pt path(s)')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640, 640], help='image (h, w)')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--device', default='cpu', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--half', action='store_true', help='FP16 half-precision export')
+ parser.add_argument('--inplace', action='store_true', help='set YOLOv5 Detect() inplace=True')
+ parser.add_argument('--train', action='store_true', help='model.train() mode')
+ parser.add_argument('--keras', action='store_true', help='TF: use Keras')
+ parser.add_argument('--optimize', action='store_true', help='TorchScript: optimize for mobile')
+ parser.add_argument('--int8', action='store_true', help='CoreML/TF INT8 quantization')
+ parser.add_argument('--dynamic', action='store_true', help='ONNX/TF/TensorRT: dynamic axes')
+ parser.add_argument('--simplify', action='store_true', help='ONNX: simplify model')
+ parser.add_argument('--opset', type=int, default=12, help='ONNX: opset version')
+ parser.add_argument('--verbose', action='store_true', help='TensorRT: verbose log')
+ parser.add_argument('--workspace', type=int, default=4, help='TensorRT: workspace size (GB)')
+ parser.add_argument('--nms', action='store_true', help='TF: add NMS to model')
+ parser.add_argument('--agnostic-nms', action='store_true', help='TF: add agnostic NMS to model')
+ parser.add_argument('--topk-per-class', type=int, default=100, help='TF.js NMS: topk per class to keep')
+ parser.add_argument('--topk-all', type=int, default=100, help='TF.js NMS: topk for all classes to keep')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='TF.js NMS: IoU threshold')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='TF.js NMS: confidence threshold')
+ parser.add_argument('--include',
+ nargs='+',
+ default=['torchscript', 'onnx'],
+ help='torchscript, onnx, openvino, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ for opt.weights in (opt.weights if isinstance(opt.weights, list) else [opt.weights]):
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/cls/hubconf.py b/yolov7_seg/cls/hubconf.py
new file mode 100644
index 000000000..37beeacd2
--- /dev/null
+++ b/yolov7_seg/cls/hubconf.py
@@ -0,0 +1,160 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+PyTorch Hub models https://pytorch.org/hub/ultralytics_yolov5/
+
+Usage:
+ import torch
+ model = torch.hub.load('ultralytics/yolov5', 'yolov5s')
+ model = torch.hub.load('ultralytics/yolov5:master', 'custom', 'path/to/yolov5s.onnx') # file from branch
+"""
+
+import torch
+
+
+def _create(name, pretrained=True, channels=3, classes=80, autoshape=True, verbose=True, device=None):
+ """Creates or loads a YOLOv5 model
+
+ Arguments:
+ name (str): model name 'yolov5s' or path 'path/to/best.pt'
+ pretrained (bool): load pretrained weights into the model
+ channels (int): number of input channels
+ classes (int): number of model classes
+ autoshape (bool): apply YOLOv5 .autoshape() wrapper to model
+ verbose (bool): print all information to screen
+ device (str, torch.device, None): device to use for model parameters
+
+ Returns:
+ YOLOv5 model
+ """
+ from pathlib import Path
+
+ from models.common import AutoShape, DetectMultiBackend
+ from models.experimental import attempt_load
+ from models.yolo import Model
+ from utils.downloads import attempt_download
+ from utils.general import LOGGER, check_requirements, intersect_dicts, logging
+ from utils.torch_utils import select_device
+
+ if not verbose:
+ LOGGER.setLevel(logging.WARNING)
+ check_requirements(exclude=('tensorboard', 'thop', 'opencv-python'))
+ name = Path(name)
+ path = name.with_suffix('.pt') if name.suffix == '' and not name.is_dir() else name # checkpoint path
+ try:
+ device = select_device(device)
+ if pretrained and channels == 3 and classes == 80:
+ try:
+ model = DetectMultiBackend(path, device=device, fuse=autoshape) # detection model
+ if autoshape:
+ model = AutoShape(model) # for file/URI/PIL/cv2/np inputs and NMS
+ except Exception:
+ model = attempt_load(path, device=device, fuse=False) # arbitrary model
+ else:
+ cfg = list((Path(__file__).parent / 'models').rglob(f'{path.stem}.yaml'))[0] # model.yaml path
+ model = Model(cfg, channels, classes) # create model
+ if pretrained:
+ ckpt = torch.load(attempt_download(path), map_location=device) # load
+ csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
+ csd = intersect_dicts(csd, model.state_dict(), exclude=['anchors']) # intersect
+ model.load_state_dict(csd, strict=False) # load
+ if len(ckpt['model'].names) == classes:
+ model.names = ckpt['model'].names # set class names attribute
+ if not verbose:
+ LOGGER.setLevel(logging.INFO) # reset to default
+ return model.to(device)
+
+ except Exception as e:
+ help_url = 'https://github.com/ultralytics/yolov5/issues/36'
+ s = f'{e}. Cache may be out of date, try `force_reload=True` or see {help_url} for help.'
+ raise Exception(s) from e
+
+
+def custom(path='path/to/model.pt', autoshape=True, _verbose=True, device=None):
+ # YOLOv5 custom or local model
+ return _create(path, autoshape=autoshape, verbose=_verbose, device=device)
+
+
+def yolov5n(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-nano model https://github.com/ultralytics/yolov5
+ return _create('yolov5n', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5s(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-small model https://github.com/ultralytics/yolov5
+ return _create('yolov5s', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5m(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-medium model https://github.com/ultralytics/yolov5
+ return _create('yolov5m', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5l(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-large model https://github.com/ultralytics/yolov5
+ return _create('yolov5l', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5x(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-xlarge model https://github.com/ultralytics/yolov5
+ return _create('yolov5x', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5n6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-nano-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5n6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5s6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-small-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5s6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5m6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-medium-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5m6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5l6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-large-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5l6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5x6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-xlarge-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5x6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+if __name__ == '__main__':
+ import argparse
+ from pathlib import Path
+
+ import numpy as np
+ from PIL import Image
+
+ from utils.general import cv2, print_args
+
+ # Argparser
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--model', type=str, default='yolov5s', help='model name')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+
+ # Model
+ model = _create(name=opt.model, pretrained=True, channels=3, classes=80, autoshape=True, verbose=True)
+ # model = custom(path='path/to/model.pt') # custom
+
+ # Images
+ imgs = [
+ 'data/images/zidane.jpg', # filename
+ Path('data/images/zidane.jpg'), # Path
+ 'https://ultralytics.com/images/zidane.jpg', # URI
+ cv2.imread('data/images/bus.jpg')[:, :, ::-1], # OpenCV
+ Image.open('data/images/bus.jpg'), # PIL
+ np.zeros((320, 640, 3))] # numpy
+
+ # Inference
+ results = model(imgs, size=320) # batched inference
+
+ # Results
+ results.print()
+ results.save()
diff --git a/yolov7_seg/cls/models/__init__.py b/yolov7_seg/cls/models/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/yolov7_seg/cls/models/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/yolov7_seg/cls/models/common.py b/yolov7_seg/cls/models/common.py
new file mode 100644
index 000000000..a65a416ad
--- /dev/null
+++ b/yolov7_seg/cls/models/common.py
@@ -0,0 +1,836 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Common modules
+"""
+
+import json
+import math
+import platform
+import warnings
+from collections import OrderedDict, namedtuple
+from copy import copy
+from pathlib import Path
+
+import cv2
+import numpy as np
+import pandas as pd
+import requests
+import torch
+import torch.nn as nn
+import yaml
+from PIL import Image
+from torch.cuda import amp
+
+from utils.dataloaders import exif_transpose, letterbox
+from utils.general import (LOGGER, check_requirements, check_suffix, check_version, colorstr, increment_path,
+ make_divisible, non_max_suppression, scale_coords, xywh2xyxy, xyxy2xywh)
+from utils.plots import Annotator, colors, save_one_box
+from utils.torch_utils import copy_attr, time_sync
+
+
+class ImplicitA(nn.Module):
+ def __init__(self, channel):
+ super(ImplicitA, self).__init__()
+ self.channel = channel
+ self.implicit = nn.Parameter(torch.zeros(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, std=.02)
+
+ def forward(self, x):
+ return self.implicit + x
+
+
+class ImplicitM(nn.Module):
+ def __init__(self, channel):
+ super(ImplicitM, self).__init__()
+ self.channel = channel
+ self.implicit = nn.Parameter(torch.ones(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=1., std=.02)
+
+ def forward(self, x):
+ return self.implicit * x
+
+
+class MP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, k=2):
+ super(MP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class SP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, k=3, s=1):
+ super(SP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=s, padding=k // 2)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class ReOrg(nn.Module):
+ def __init__(self):
+ super(ReOrg, self).__init__()
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1)
+
+
+def autopad(k, p=None): # kernel, padding
+ # Pad to 'same'
+ if p is None:
+ p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
+ return p
+
+
+class Conv(nn.Module):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ def forward(self, x):
+ return self.act(self.bn(self.conv(x)))
+
+ def forward_fuse(self, x):
+ return self.act(self.conv(x))
+
+
+class DWConv(Conv):
+ # Depth-wise convolution class
+ def __init__(self, c1, c2, k=1, s=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__(c1, c2, k, s, g=math.gcd(c1, c2), act=act)
+
+
+class DWConvTranspose2d(nn.ConvTranspose2d):
+ # Depth-wise transpose convolution class
+ def __init__(self, c1, c2, k=1, s=1, p1=0, p2=0): # ch_in, ch_out, kernel, stride, padding, padding_out
+ super().__init__(c1, c2, k, s, p1, p2, groups=math.gcd(c1, c2))
+
+
+class TransformerLayer(nn.Module):
+ # Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance)
+ def __init__(self, c, num_heads):
+ super().__init__()
+ self.q = nn.Linear(c, c, bias=False)
+ self.k = nn.Linear(c, c, bias=False)
+ self.v = nn.Linear(c, c, bias=False)
+ self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads)
+ self.fc1 = nn.Linear(c, c, bias=False)
+ self.fc2 = nn.Linear(c, c, bias=False)
+
+ def forward(self, x):
+ x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x
+ x = self.fc2(self.fc1(x)) + x
+ return x
+
+
+class TransformerBlock(nn.Module):
+ # Vision Transformer https://arxiv.org/abs/2010.11929
+ def __init__(self, c1, c2, num_heads, num_layers):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+ self.linear = nn.Linear(c2, c2) # learnable position embedding
+ self.tr = nn.Sequential(*(TransformerLayer(c2, num_heads) for _ in range(num_layers)))
+ self.c2 = c2
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ b, _, w, h = x.shape
+ p = x.flatten(2).permute(2, 0, 1)
+ return self.tr(p + self.linear(p)).permute(1, 2, 0).reshape(b, self.c2, w, h)
+
+
+class Bottleneck(nn.Module):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2, 3, 1, g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class BottleneckCSP(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False)
+ self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(cv2, cv3)
+ self.act = nn.SiLU()
+ self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(self.act(self.bn(torch.cat((y1, y2), 1))))
+
+
+class CrossConv(nn.Module):
+ # Cross Convolution Downsample
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False):
+ # ch_in, ch_out, kernel, stride, groups, expansion, shortcut
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, (1, k), (1, s))
+ self.cv2 = Conv(c_, c2, (k, 1), (s, 1), g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class C3(nn.Module):
+ # CSP Bottleneck with 3 convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)
+ self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
+
+ def forward(self, x):
+ return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))
+
+
+class C3x(C3):
+ # C3 module with cross-convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = nn.Sequential(*(CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)))
+
+
+class C3TR(C3):
+ # C3 module with TransformerBlock()
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = TransformerBlock(c_, c_, 4, n)
+
+
+class C3SPP(C3):
+ # C3 module with SPP()
+ def __init__(self, c1, c2, k=(5, 9, 13), n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = SPP(c_, c_, k)
+
+
+class C3Ghost(C3):
+ # C3 module with GhostBottleneck()
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*(GhostBottleneck(c_, c_) for _ in range(n)))
+
+
+class SPP(nn.Module):
+ # Spatial Pyramid Pooling (SPP) layer https://arxiv.org/abs/1406.4729
+ def __init__(self, c1, c2, k=(5, 9, 13)):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+
+ def forward(self, x):
+ x = self.cv1(x)
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
+ return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))
+
+
+class SPPF(nn.Module):
+ # Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
+ def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * 4, c2, 1, 1)
+ self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(torch.cat((x, y1, y2, self.m(y2)), 1))
+
+
+class SPPCSPC(nn.Module):
+ # CSP SPP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super(SPPCSPC, self).__init__()
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 1)
+ self.cv4 = Conv(c_, c_, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+ self.cv5 = Conv(4 * c_, c_, 1, 1)
+ self.cv6 = Conv(c_, c_, 3, 1)
+ self.cv7 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x1 = self.cv4(self.cv3(self.cv1(x)))
+ y1 = self.cv6(self.cv5(torch.cat([x1] + [m(x1) for m in self.m], 1)))
+ y2 = self.cv2(x)
+ return self.cv7(torch.cat((y1, y2), dim=1))
+
+
+class Focus(nn.Module):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
+ # self.contract = Contract(gain=2)
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return self.conv(torch.cat((x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]), 1))
+ # return self.conv(self.contract(x))
+
+
+class GhostConv(nn.Module):
+ # Ghost Convolution https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
+ super().__init__()
+ c_ = c2 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, k, s, None, g, act)
+ self.cv2 = Conv(c_, c_, 5, 1, None, c_, act)
+
+ def forward(self, x):
+ y = self.cv1(x)
+ return torch.cat((y, self.cv2(y)), 1)
+
+
+class GhostBottleneck(nn.Module):
+ # Ghost Bottleneck https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride
+ super().__init__()
+ c_ = c2 // 2
+ self.conv = nn.Sequential(
+ GhostConv(c1, c_, 1, 1), # pw
+ DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw
+ GhostConv(c_, c2, 1, 1, act=False)) # pw-linear
+ self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False), Conv(c1, c2, 1, 1,
+ act=False)) if s == 2 else nn.Identity()
+
+ def forward(self, x):
+ return self.conv(x) + self.shortcut(x)
+
+
+class Contract(nn.Module):
+ # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ b, c, h, w = x.size() # assert (h / s == 0) and (W / s == 0), 'Indivisible gain'
+ s = self.gain
+ x = x.view(b, c, h // s, s, w // s, s) # x(1,64,40,2,40,2)
+ x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
+ return x.view(b, c * s * s, h // s, w // s) # x(1,256,40,40)
+
+
+class Expand(nn.Module):
+ # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ b, c, h, w = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
+ s = self.gain
+ x = x.view(b, s, s, c // s ** 2, h, w) # x(1,2,2,16,80,80)
+ x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
+ return x.view(b, c // s ** 2, h * s, w * s) # x(1,16,160,160)
+
+
+class Concat(nn.Module):
+ # Concatenate a list of tensors along dimension
+ def __init__(self, dimension=1):
+ super().__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return torch.cat(x, self.d)
+
+
+class DetectMultiBackend(nn.Module):
+ # YOLOv5 MultiBackend class for python inference on various backends
+ def __init__(self, weights='yolov5s.pt', device=torch.device('cpu'), dnn=False, data=None, fp16=False, fuse=True):
+ # Usage:
+ # PyTorch: weights = *.pt
+ # TorchScript: *.torchscript
+ # ONNX Runtime: *.onnx
+ # ONNX OpenCV DNN: *.onnx with --dnn
+ # OpenVINO: *.xml
+ # CoreML: *.mlmodel
+ # TensorRT: *.engine
+ # TensorFlow SavedModel: *_saved_model
+ # TensorFlow GraphDef: *.pb
+ # TensorFlow Lite: *.tflite
+ # TensorFlow Edge TPU: *_edgetpu.tflite
+ from models.experimental import attempt_download, attempt_load # scoped to avoid circular import
+
+ super().__init__()
+ w = str(weights[0] if isinstance(weights, list) else weights)
+ pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs = self.model_type(w) # get backend
+ w = attempt_download(w) # download if not local
+ fp16 &= (pt or jit or onnx or engine) and device.type != 'cpu' # FP16
+ stride, names = 32, [f'class{i}' for i in range(1000)] # assign defaults
+ if data: # assign class names (optional)
+ with open(data, errors='ignore') as f:
+ names = yaml.safe_load(f)['names']
+
+ if pt: # PyTorch
+ model = attempt_load(weights if isinstance(weights, list) else w, device=device, inplace=True, fuse=fuse)
+ stride = max(int(model.stride.max()), 32) # model stride
+ names = model.module.names if hasattr(model, 'module') else model.names # get class names
+ model.half() if fp16 else model.float()
+ self.model = model # explicitly assign for to(), cpu(), cuda(), half()
+ elif jit: # TorchScript
+ LOGGER.info(f'Loading {w} for TorchScript inference...')
+ extra_files = {'config.txt': ''} # model metadata
+ model = torch.jit.load(w, _extra_files=extra_files)
+ model.half() if fp16 else model.float()
+ if extra_files['config.txt']:
+ d = json.loads(extra_files['config.txt']) # extra_files dict
+ stride, names = int(d['stride']), d['names']
+ elif dnn: # ONNX OpenCV DNN
+ LOGGER.info(f'Loading {w} for ONNX OpenCV DNN inference...')
+ check_requirements(('opencv-python>=4.5.4',))
+ net = cv2.dnn.readNetFromONNX(w)
+ elif onnx: # ONNX Runtime
+ LOGGER.info(f'Loading {w} for ONNX Runtime inference...')
+ cuda = torch.cuda.is_available()
+ check_requirements(('onnx', 'onnxruntime-gpu' if cuda else 'onnxruntime'))
+ import onnxruntime
+ providers = ['CUDAExecutionProvider', 'CPUExecutionProvider'] if cuda else ['CPUExecutionProvider']
+ session = onnxruntime.InferenceSession(w, providers=providers)
+ meta = session.get_modelmeta().custom_metadata_map # metadata
+ if 'stride' in meta:
+ stride, names = int(meta['stride']), eval(meta['names'])
+ elif xml: # OpenVINO
+ LOGGER.info(f'Loading {w} for OpenVINO inference...')
+ check_requirements(('openvino',)) # requires openvino-dev: https://pypi.org/project/openvino-dev/
+ from openvino.runtime import Core, Layout, get_batch
+ ie = Core()
+ if not Path(w).is_file(): # if not *.xml
+ w = next(Path(w).glob('*.xml')) # get *.xml file from *_openvino_model dir
+ network = ie.read_model(model=w, weights=Path(w).with_suffix('.bin'))
+ if network.get_parameters()[0].get_layout().empty:
+ network.get_parameters()[0].set_layout(Layout("NCHW"))
+ batch_dim = get_batch(network)
+ if batch_dim.is_static:
+ batch_size = batch_dim.get_length()
+ executable_network = ie.compile_model(network, device_name="CPU") # device_name="MYRIAD" for Intel NCS2
+ output_layer = next(iter(executable_network.outputs))
+ meta = Path(w).with_suffix('.yaml')
+ if meta.exists():
+ stride, names = self._load_metadata(meta) # load metadata
+ elif engine: # TensorRT
+ LOGGER.info(f'Loading {w} for TensorRT inference...')
+ import tensorrt as trt # https://developer.nvidia.com/nvidia-tensorrt-download
+ check_version(trt.__version__, '7.0.0', hard=True) # require tensorrt>=7.0.0
+ Binding = namedtuple('Binding', ('name', 'dtype', 'shape', 'data', 'ptr'))
+ logger = trt.Logger(trt.Logger.INFO)
+ with open(w, 'rb') as f, trt.Runtime(logger) as runtime:
+ model = runtime.deserialize_cuda_engine(f.read())
+ context = model.create_execution_context()
+ bindings = OrderedDict()
+ fp16 = False # default updated below
+ dynamic = False
+ for index in range(model.num_bindings):
+ name = model.get_binding_name(index)
+ dtype = trt.nptype(model.get_binding_dtype(index))
+ if model.binding_is_input(index):
+ if -1 in tuple(model.get_binding_shape(index)): # dynamic
+ dynamic = True
+ context.set_binding_shape(index, tuple(model.get_profile_shape(0, index)[2]))
+ if dtype == np.float16:
+ fp16 = True
+ shape = tuple(context.get_binding_shape(index))
+ data = torch.from_numpy(np.empty(shape, dtype=np.dtype(dtype))).to(device)
+ bindings[name] = Binding(name, dtype, shape, data, int(data.data_ptr()))
+ binding_addrs = OrderedDict((n, d.ptr) for n, d in bindings.items())
+ batch_size = bindings['images'].shape[0] # if dynamic, this is instead max batch size
+ elif coreml: # CoreML
+ LOGGER.info(f'Loading {w} for CoreML inference...')
+ import coremltools as ct
+ model = ct.models.MLModel(w)
+ else: # TensorFlow (SavedModel, GraphDef, Lite, Edge TPU)
+ if saved_model: # SavedModel
+ LOGGER.info(f'Loading {w} for TensorFlow SavedModel inference...')
+ import tensorflow as tf
+ keras = False # assume TF1 saved_model
+ model = tf.keras.models.load_model(w) if keras else tf.saved_model.load(w)
+ elif pb: # GraphDef https://www.tensorflow.org/guide/migrate#a_graphpb_or_graphpbtxt
+ LOGGER.info(f'Loading {w} for TensorFlow GraphDef inference...')
+ import tensorflow as tf
+
+ def wrap_frozen_graph(gd, inputs, outputs):
+ x = tf.compat.v1.wrap_function(lambda: tf.compat.v1.import_graph_def(gd, name=""), []) # wrapped
+ ge = x.graph.as_graph_element
+ return x.prune(tf.nest.map_structure(ge, inputs), tf.nest.map_structure(ge, outputs))
+
+ gd = tf.Graph().as_graph_def() # graph_def
+ with open(w, 'rb') as f:
+ gd.ParseFromString(f.read())
+ frozen_func = wrap_frozen_graph(gd, inputs="x:0", outputs="Identity:0")
+ elif tflite or edgetpu: # https://www.tensorflow.org/lite/guide/python#install_tensorflow_lite_for_python
+ try: # https://coral.ai/docs/edgetpu/tflite-python/#update-existing-tf-lite-code-for-the-edge-tpu
+ from tflite_runtime.interpreter import Interpreter, load_delegate
+ except ImportError:
+ import tensorflow as tf
+ Interpreter, load_delegate = tf.lite.Interpreter, tf.lite.experimental.load_delegate,
+ if edgetpu: # Edge TPU https://coral.ai/software/#edgetpu-runtime
+ LOGGER.info(f'Loading {w} for TensorFlow Lite Edge TPU inference...')
+ delegate = {
+ 'Linux': 'libedgetpu.so.1',
+ 'Darwin': 'libedgetpu.1.dylib',
+ 'Windows': 'edgetpu.dll'}[platform.system()]
+ interpreter = Interpreter(model_path=w, experimental_delegates=[load_delegate(delegate)])
+ else: # Lite
+ LOGGER.info(f'Loading {w} for TensorFlow Lite inference...')
+ interpreter = Interpreter(model_path=w) # load TFLite model
+ interpreter.allocate_tensors() # allocate
+ input_details = interpreter.get_input_details() # inputs
+ output_details = interpreter.get_output_details() # outputs
+ elif tfjs:
+ raise Exception('ERROR: YOLOv5 TF.js inference is not supported')
+ else:
+ raise Exception(f'ERROR: {w} is not a supported format')
+ self.__dict__.update(locals()) # assign all variables to self
+
+ def forward(self, im, augment=False, visualize=False, val=False):
+ # YOLOv5 MultiBackend inference
+ b, ch, h, w = im.shape # batch, channel, height, width
+ if self.fp16 and im.dtype != torch.float16:
+ im = im.half() # to FP16
+
+ if self.pt: # PyTorch
+ y = self.model(im, augment=augment, visualize=visualize)[0]
+ elif self.jit: # TorchScript
+ y = self.model(im)[0]
+ elif self.dnn: # ONNX OpenCV DNN
+ im = im.cpu().numpy() # torch to numpy
+ self.net.setInput(im)
+ y = self.net.forward()
+ elif self.onnx: # ONNX Runtime
+ im = im.cpu().numpy() # torch to numpy
+ y = self.session.run([self.session.get_outputs()[0].name], {self.session.get_inputs()[0].name: im})[0]
+ elif self.xml: # OpenVINO
+ im = im.cpu().numpy() # FP32
+ y = self.executable_network([im])[self.output_layer]
+ elif self.engine: # TensorRT
+ if self.dynamic and im.shape != self.bindings['images'].shape:
+ i_in, i_out = (self.model.get_binding_index(x) for x in ('images', 'output'))
+ self.context.set_binding_shape(i_in, im.shape) # reshape if dynamic
+ self.bindings['images'] = self.bindings['images']._replace(shape=im.shape)
+ self.bindings['output'].data.resize_(tuple(self.context.get_binding_shape(i_out)))
+ s = self.bindings['images'].shape
+ assert im.shape == s, f"input size {im.shape} {'>' if self.dynamic else 'not equal to'} max model size {s}"
+ self.binding_addrs['images'] = int(im.data_ptr())
+ self.context.execute_v2(list(self.binding_addrs.values()))
+ y = self.bindings['output'].data
+ elif self.coreml: # CoreML
+ im = im.permute(0, 2, 3, 1).cpu().numpy() # torch BCHW to numpy BHWC shape(1,320,192,3)
+ im = Image.fromarray((im[0] * 255).astype('uint8'))
+ # im = im.resize((192, 320), Image.ANTIALIAS)
+ y = self.model.predict({'image': im}) # coordinates are xywh normalized
+ if 'confidence' in y:
+ box = xywh2xyxy(y['coordinates'] * [[w, h, w, h]]) # xyxy pixels
+ conf, cls = y['confidence'].max(1), y['confidence'].argmax(1).astype(np.float)
+ y = np.concatenate((box, conf.reshape(-1, 1), cls.reshape(-1, 1)), 1)
+ else:
+ k = 'var_' + str(sorted(int(k.replace('var_', '')) for k in y)[-1]) # output key
+ y = y[k] # output
+ else: # TensorFlow (SavedModel, GraphDef, Lite, Edge TPU)
+ im = im.permute(0, 2, 3, 1).cpu().numpy() # torch BCHW to numpy BHWC shape(1,320,192,3)
+ if self.saved_model: # SavedModel
+ y = (self.model(im, training=False) if self.keras else self.model(im)).numpy()
+ elif self.pb: # GraphDef
+ y = self.frozen_func(x=self.tf.constant(im)).numpy()
+ else: # Lite or Edge TPU
+ input, output = self.input_details[0], self.output_details[0]
+ int8 = input['dtype'] == np.uint8 # is TFLite quantized uint8 model
+ if int8:
+ scale, zero_point = input['quantization']
+ im = (im / scale + zero_point).astype(np.uint8) # de-scale
+ self.interpreter.set_tensor(input['index'], im)
+ self.interpreter.invoke()
+ y = self.interpreter.get_tensor(output['index'])
+ if int8:
+ scale, zero_point = output['quantization']
+ y = (y.astype(np.float32) - zero_point) * scale # re-scale
+ y[..., :4] *= [w, h, w, h] # xywh normalized to pixels
+
+ if isinstance(y, np.ndarray):
+ y = torch.tensor(y, device=self.device)
+ return (y, []) if val else y
+
+ def warmup(self, imgsz=(1, 3, 640, 640)):
+ # Warmup model by running inference once
+ warmup_types = self.pt, self.jit, self.onnx, self.engine, self.saved_model, self.pb
+ if any(warmup_types) and self.device.type != 'cpu':
+ im = torch.zeros(*imgsz, dtype=torch.half if self.fp16 else torch.float, device=self.device) # input
+ for _ in range(2 if self.jit else 1): #
+ self.forward(im) # warmup
+
+ @staticmethod
+ def model_type(p='path/to/model.pt'):
+ # Return model type from model path, i.e. path='path/to/model.onnx' -> type=onnx
+ from export import export_formats
+ suffixes = list(export_formats().Suffix) + ['.xml'] # export suffixes
+ check_suffix(p, suffixes) # checks
+ p = Path(p).name # eliminate trailing separators
+ pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs, xml2 = (s in p for s in suffixes)
+ xml |= xml2 # *_openvino_model or *.xml
+ tflite &= not edgetpu # *.tflite
+ return pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs
+
+ @staticmethod
+ def _load_metadata(f='path/to/meta.yaml'):
+ # Load metadata from meta.yaml if it exists
+ with open(f, errors='ignore') as f:
+ d = yaml.safe_load(f)
+ return d['stride'], d['names'] # assign stride, names
+
+
+class AutoShape(nn.Module):
+ # YOLOv5 input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS
+ conf = 0.25 # NMS confidence threshold
+ iou = 0.45 # NMS IoU threshold
+ agnostic = False # NMS class-agnostic
+ multi_label = False # NMS multiple labels per box
+ classes = None # (optional list) filter by class, i.e. = [0, 15, 16] for COCO persons, cats and dogs
+ max_det = 1000 # maximum number of detections per image
+ amp = False # Automatic Mixed Precision (AMP) inference
+
+ def __init__(self, model, verbose=True):
+ super().__init__()
+ if verbose:
+ LOGGER.info('Adding AutoShape... ')
+ copy_attr(self, model, include=('yaml', 'nc', 'hyp', 'names', 'stride', 'abc'), exclude=()) # copy attributes
+ self.dmb = isinstance(model, DetectMultiBackend) # DetectMultiBackend() instance
+ self.pt = not self.dmb or model.pt # PyTorch model
+ self.model = model.eval()
+ if self.pt:
+ m = self.model.model.model[-1] if self.dmb else self.model.model[-1] # Detect()
+ m.inplace = False # Detect.inplace=False for safe multithread inference
+
+ def _apply(self, fn):
+ # Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers
+ self = super()._apply(fn)
+ if self.pt:
+ m = self.model.model.model[-1] if self.dmb else self.model.model[-1] # Detect()
+ m.stride = fn(m.stride)
+ m.grid = list(map(fn, m.grid))
+ if isinstance(m.anchor_grid, list):
+ m.anchor_grid = list(map(fn, m.anchor_grid))
+ return self
+
+ @torch.no_grad()
+ def forward(self, imgs, size=640, augment=False, profile=False):
+ # Inference from various sources. For height=640, width=1280, RGB images example inputs are:
+ # file: imgs = 'data/images/zidane.jpg' # str or PosixPath
+ # URI: = 'https://ultralytics.com/images/zidane.jpg'
+ # OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3)
+ # PIL: = Image.open('image.jpg') or ImageGrab.grab() # HWC x(640,1280,3)
+ # numpy: = np.zeros((640,1280,3)) # HWC
+ # torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values)
+ # multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images
+
+ t = [time_sync()]
+ p = next(self.model.parameters()) if self.pt else torch.zeros(1, device=self.model.device) # for device, type
+ autocast = self.amp and (p.device.type != 'cpu') # Automatic Mixed Precision (AMP) inference
+ if isinstance(imgs, torch.Tensor): # torch
+ with amp.autocast(autocast):
+ return self.model(imgs.to(p.device).type_as(p), augment, profile) # inference
+
+ # Pre-process
+ n, imgs = (len(imgs), list(imgs)) if isinstance(imgs, (list, tuple)) else (1, [imgs]) # number, list of images
+ shape0, shape1, files = [], [], [] # image and inference shapes, filenames
+ for i, im in enumerate(imgs):
+ f = f'image{i}' # filename
+ if isinstance(im, (str, Path)): # filename or uri
+ im, f = Image.open(requests.get(im, stream=True).raw if str(im).startswith('http') else im), im
+ im = np.asarray(exif_transpose(im))
+ elif isinstance(im, Image.Image): # PIL Image
+ im, f = np.asarray(exif_transpose(im)), getattr(im, 'filename', f) or f
+ files.append(Path(f).with_suffix('.jpg').name)
+ if im.shape[0] < 5: # image in CHW
+ im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1)
+ im = im[..., :3] if im.ndim == 3 else np.tile(im[..., None], 3) # enforce 3ch input
+ s = im.shape[:2] # HWC
+ shape0.append(s) # image shape
+ g = (size / max(s)) # gain
+ shape1.append([y * g for y in s])
+ imgs[i] = im if im.data.contiguous else np.ascontiguousarray(im) # update
+ shape1 = [make_divisible(x, self.stride) if self.pt else size for x in np.array(shape1).max(0)] # inf shape
+ x = [letterbox(im, shape1, auto=False)[0] for im in imgs] # pad
+ x = np.ascontiguousarray(np.array(x).transpose((0, 3, 1, 2))) # stack and BHWC to BCHW
+ x = torch.from_numpy(x).to(p.device).type_as(p) / 255 # uint8 to fp16/32
+ t.append(time_sync())
+
+ with amp.autocast(autocast):
+ # Inference
+ y = self.model(x, augment, profile) # forward
+ t.append(time_sync())
+
+ # Post-process
+ y = non_max_suppression(y if self.dmb else y[0],
+ self.conf,
+ self.iou,
+ self.classes,
+ self.agnostic,
+ self.multi_label,
+ max_det=self.max_det) # NMS
+ for i in range(n):
+ scale_coords(shape1, y[i][:, :4], shape0[i])
+
+ t.append(time_sync())
+ return Detections(imgs, y, files, t, self.names, x.shape)
+
+
+class Detections:
+ # YOLOv5 detections class for inference results
+ def __init__(self, imgs, pred, files, times=(0, 0, 0, 0), names=None, shape=None):
+ super().__init__()
+ d = pred[0].device # device
+ gn = [torch.tensor([*(im.shape[i] for i in [1, 0, 1, 0]), 1, 1], device=d) for im in imgs] # normalizations
+ self.imgs = imgs # list of images as numpy arrays
+ self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls)
+ self.names = names # class names
+ self.files = files # image filenames
+ self.times = times # profiling times
+ self.xyxy = pred # xyxy pixels
+ self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels
+ self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized
+ self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized
+ self.n = len(self.pred) # number of images (batch size)
+ self.t = tuple((times[i + 1] - times[i]) * 1000 / self.n for i in range(3)) # timestamps (ms)
+ self.s = shape # inference BCHW shape
+
+ def display(self, pprint=False, show=False, save=False, crop=False, render=False, labels=True, save_dir=Path('')):
+ crops = []
+ for i, (im, pred) in enumerate(zip(self.imgs, self.pred)):
+ s = f'image {i + 1}/{len(self.pred)}: {im.shape[0]}x{im.shape[1]} ' # string
+ if pred.shape[0]:
+ for c in pred[:, -1].unique():
+ n = (pred[:, -1] == c).sum() # detections per class
+ s += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string
+ if show or save or render or crop:
+ annotator = Annotator(im, example=str(self.names))
+ for *box, conf, cls in reversed(pred): # xyxy, confidence, class
+ label = f'{self.names[int(cls)]} {conf:.2f}'
+ if crop:
+ file = save_dir / 'crops' / self.names[int(cls)] / self.files[i] if save else None
+ crops.append({
+ 'box': box,
+ 'conf': conf,
+ 'cls': cls,
+ 'label': label,
+ 'im': save_one_box(box, im, file=file, save=save)})
+ else: # all others
+ annotator.box_label(box, label if labels else '', color=colors(cls))
+ im = annotator.im
+ else:
+ s += '(no detections)'
+
+ im = Image.fromarray(im.astype(np.uint8)) if isinstance(im, np.ndarray) else im # from np
+ if pprint:
+ print(s.rstrip(', '))
+ if show:
+ im.show(self.files[i]) # show
+ if save:
+ f = self.files[i]
+ im.save(save_dir / f) # save
+ if i == self.n - 1:
+ LOGGER.info(f"Saved {self.n} image{'s' * (self.n > 1)} to {colorstr('bold', save_dir)}")
+ if render:
+ self.imgs[i] = np.asarray(im)
+ if crop:
+ if save:
+ LOGGER.info(f'Saved results to {save_dir}\n')
+ return crops
+
+ def print(self):
+ self.display(pprint=True) # print results
+ print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {tuple(self.s)}' % self.t)
+
+ def show(self, labels=True):
+ self.display(show=True, labels=labels) # show results
+
+ def save(self, labels=True, save_dir='runs/detect/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) # increment save_dir
+ self.display(save=True, labels=labels, save_dir=save_dir) # save results
+
+ def crop(self, save=True, save_dir='runs/detect/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) if save else None
+ return self.display(crop=True, save=save, save_dir=save_dir) # crop results
+
+ def render(self, labels=True):
+ self.display(render=True, labels=labels) # render results
+ return self.imgs
+
+ def pandas(self):
+ # return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0])
+ new = copy(self) # return copy
+ ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns
+ cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns
+ for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]):
+ a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update
+ setattr(new, k, [pd.DataFrame(x, columns=c) for x in a])
+ return new
+
+ def tolist(self):
+ # return a list of Detections objects, i.e. 'for result in results.tolist():'
+ r = range(self.n) # iterable
+ x = [Detections([self.imgs[i]], [self.pred[i]], [self.files[i]], self.times, self.names, self.s) for i in r]
+ # for d in x:
+ # for k in ['imgs', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']:
+ # setattr(d, k, getattr(d, k)[0]) # pop out of list
+ return x
+
+ def __len__(self):
+ return self.n # override len(results)
+
+ def __str__(self):
+ self.print() # override print(results)
+ return ''
+
+
+class Classify(nn.Module):
+ # Classification head, i.e. x(b,c1,20,20) to x(b,c2)
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ c_ = 1280 # efficientnet_b0 size
+ self.conv = Conv(c1, c_, k, s, autopad(k, p), g)
+ self.pool = nn.AdaptiveAvgPool2d(1) # to x(b,c_,1,1)
+ self.drop = nn.Dropout(p=0.0, inplace=True)
+ self.linear = nn.Linear(c_, c2) # to x(b,c2)
+
+ def forward(self, x):
+ if isinstance(x, list):
+ x = torch.cat(x, 1)
+ return self.linear(self.drop(self.pool(self.conv(x)).flatten(1)))
diff --git a/yolov7_seg/cls/models/experimental.py b/yolov7_seg/cls/models/experimental.py
new file mode 100644
index 000000000..374c4a065
--- /dev/null
+++ b/yolov7_seg/cls/models/experimental.py
@@ -0,0 +1,105 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Experimental modules
+"""
+import math
+
+import numpy as np
+import torch
+import torch.nn as nn
+
+from models.common import Conv
+from utils.downloads import attempt_download
+
+
+class Sum(nn.Module):
+ # Weighted sum of 2 or more layers https://arxiv.org/abs/1911.09070
+ def __init__(self, n, weight=False): # n: number of inputs
+ super().__init__()
+ self.weight = weight # apply weights boolean
+ self.iter = range(n - 1) # iter object
+ if weight:
+ self.w = nn.Parameter(-torch.arange(1.0, n) / 2, requires_grad=True) # layer weights
+
+ def forward(self, x):
+ y = x[0] # no weight
+ if self.weight:
+ w = torch.sigmoid(self.w) * 2
+ for i in self.iter:
+ y = y + x[i + 1] * w[i]
+ else:
+ for i in self.iter:
+ y = y + x[i + 1]
+ return y
+
+
+class MixConv2d(nn.Module):
+ # Mixed Depth-wise Conv https://arxiv.org/abs/1907.09595
+ def __init__(self, c1, c2, k=(1, 3), s=1, equal_ch=True): # ch_in, ch_out, kernel, stride, ch_strategy
+ super().__init__()
+ n = len(k) # number of convolutions
+ if equal_ch: # equal c_ per group
+ i = torch.linspace(0, n - 1E-6, c2).floor() # c2 indices
+ c_ = [(i == g).sum() for g in range(n)] # intermediate channels
+ else: # equal weight.numel() per group
+ b = [c2] + [0] * n
+ a = np.eye(n + 1, n, k=-1)
+ a -= np.roll(a, 1, axis=1)
+ a *= np.array(k) ** 2
+ a[0] = 1
+ c_ = np.linalg.lstsq(a, b, rcond=None)[0].round() # solve for equal weight indices, ax = b
+
+ self.m = nn.ModuleList([
+ nn.Conv2d(c1, int(c_), k, s, k // 2, groups=math.gcd(c1, int(c_)), bias=False) for k, c_ in zip(k, c_)])
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU()
+
+ def forward(self, x):
+ return self.act(self.bn(torch.cat([m(x) for m in self.m], 1)))
+
+
+class Ensemble(nn.ModuleList):
+ # Ensemble of models
+ def __init__(self):
+ super().__init__()
+
+ def forward(self, x, augment=False, profile=False, visualize=False):
+ y = [module(x, augment, profile, visualize)[0] for module in self]
+ # y = torch.stack(y).max(0)[0] # max ensemble
+ # y = torch.stack(y).mean(0) # mean ensemble
+ y = torch.cat(y, 1) # nms ensemble
+ return y, None # inference, train output
+
+
+def attempt_load(weights, device=None, inplace=True, fuse=True):
+ # Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a
+ from models.yolo import Detect, Model
+
+ model = Ensemble()
+ for w in weights if isinstance(weights, list) else [weights]:
+ ckpt = torch.load(attempt_download(w), map_location='cpu') # load
+ ckpt = (ckpt.get('ema') or ckpt['model']).to(device).float() # FP32 model
+ model.append(ckpt.fuse().eval() if fuse else ckpt.eval()) # fused or un-fused model in eval mode
+
+ # Compatibility updates
+ for m in model.modules():
+ t = type(m)
+ if t in (nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU, Detect, Model):
+ m.inplace = inplace # torch 1.7.0 compatibility
+ if t is Detect and not isinstance(m.anchor_grid, list):
+ delattr(m, 'anchor_grid')
+ setattr(m, 'anchor_grid', [torch.zeros(1)] * m.nl)
+ elif t is nn.Upsample and not hasattr(m, 'recompute_scale_factor'):
+ m.recompute_scale_factor = None # torch 1.11.0 compatibility
+
+ # Return model
+ if len(model) == 1:
+ return model[-1]
+
+ # Return detection ensemble
+ print(f'Ensemble created with {weights}\n')
+ for k in 'names', 'nc', 'yaml':
+ setattr(model, k, getattr(model[0], k))
+ model.stride = model[torch.argmax(torch.tensor([m.stride.max() for m in model])).int()].stride # max stride
+ assert all(model[0].nc == m.nc for m in model), f'Models have different class counts: {[m.nc for m in model]}'
+ return model
diff --git a/yolov7_seg/cls/models/hub/yolov3-spp.yaml b/yolov7_seg/cls/models/hub/yolov3-spp.yaml
new file mode 100644
index 000000000..299d76669
--- /dev/null
+++ b/yolov7_seg/cls/models/hub/yolov3-spp.yaml
@@ -0,0 +1,51 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,13, 16,30, 33,23] # P3/8
+ - [30,61, 62,45, 59,119] # P4/16
+ - [116,90, 156,198, 373,326] # P5/32
+
+# darknet53 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Bottleneck, [64]],
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 2, Bottleneck, [128]],
+ [-1, 1, Conv, [256, 3, 2]], # 5-P3/8
+ [-1, 8, Bottleneck, [256]],
+ [-1, 1, Conv, [512, 3, 2]], # 7-P4/16
+ [-1, 8, Bottleneck, [512]],
+ [-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
+ [-1, 4, Bottleneck, [1024]], # 10
+ ]
+
+# YOLOv3-SPP head
+head:
+ [[-1, 1, Bottleneck, [1024, False]],
+ [-1, 1, SPP, [512, [5, 9, 13]]],
+ [-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 6], 1, Concat, [1]], # cat backbone P3
+ [-1, 1, Bottleneck, [256, False]],
+ [-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)
+
+ [[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
+ ]
diff --git a/yolov7_seg/cls/models/hub/yolov3-tiny.yaml b/yolov7_seg/cls/models/hub/yolov3-tiny.yaml
new file mode 100644
index 000000000..f9ac6b177
--- /dev/null
+++ b/yolov7_seg/cls/models/hub/yolov3-tiny.yaml
@@ -0,0 +1,41 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,14, 23,27, 37,58] # P4/16
+ - [81,82, 135,169, 344,319] # P5/32
+
+# YOLOv3-tiny backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [16, 3, 1]], # 0
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 1-P1/2
+ [-1, 1, Conv, [32, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 3-P2/4
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 5-P3/8
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 7-P4/16
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 9-P5/32
+ [-1, 1, Conv, [512, 3, 1]],
+ [-1, 1, nn.ZeroPad2d, [[0, 1, 0, 1]]], # 11
+ [-1, 1, nn.MaxPool2d, [2, 1, 0]], # 12
+ ]
+
+# YOLOv3-tiny head
+head:
+ [[-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Conv, [256, 3, 1]], # 19 (P4/16-medium)
+
+ [[19, 15], 1, Detect, [nc, anchors]], # Detect(P4, P5)
+ ]
diff --git a/yolov7_seg/cls/models/hub/yolov3.yaml b/yolov7_seg/cls/models/hub/yolov3.yaml
new file mode 100644
index 000000000..22b29d22c
--- /dev/null
+++ b/yolov7_seg/cls/models/hub/yolov3.yaml
@@ -0,0 +1,51 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,13, 16,30, 33,23] # P3/8
+ - [30,61, 62,45, 59,119] # P4/16
+ - [116,90, 156,198, 373,326] # P5/32
+
+# darknet53 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Bottleneck, [64]],
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 2, Bottleneck, [128]],
+ [-1, 1, Conv, [256, 3, 2]], # 5-P3/8
+ [-1, 8, Bottleneck, [256]],
+ [-1, 1, Conv, [512, 3, 2]], # 7-P4/16
+ [-1, 8, Bottleneck, [512]],
+ [-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
+ [-1, 4, Bottleneck, [1024]], # 10
+ ]
+
+# YOLOv3 head
+head:
+ [[-1, 1, Bottleneck, [1024, False]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 6], 1, Concat, [1]], # cat backbone P3
+ [-1, 1, Bottleneck, [256, False]],
+ [-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)
+
+ [[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
+ ]
diff --git a/yolov7_seg/cls/models/tf.py b/yolov7_seg/cls/models/tf.py
new file mode 100644
index 000000000..fb2cf814a
--- /dev/null
+++ b/yolov7_seg/cls/models/tf.py
@@ -0,0 +1,574 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+TensorFlow, Keras and TFLite versions of YOLOv5
+Authored by https://github.com/zldrobit in PR https://github.com/ultralytics/yolov5/pull/1127
+
+Usage:
+ $ python models/tf.py --weights yolov5s.pt
+
+Export:
+ $ python path/to/export.py --weights yolov5s.pt --include saved_model pb tflite tfjs
+"""
+
+import argparse
+import sys
+from copy import deepcopy
+from pathlib import Path
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+# ROOT = ROOT.relative_to(Path.cwd()) # relative
+
+import numpy as np
+import tensorflow as tf
+import torch
+import torch.nn as nn
+from tensorflow import keras
+
+from models.common import (C3, SPP, SPPF, Bottleneck, BottleneckCSP, C3x, Concat, Conv, CrossConv, DWConv,
+ DWConvTranspose2d, Focus, autopad)
+from models.experimental import MixConv2d, attempt_load
+from models.yolo import Detect
+from utils.activations import SiLU
+from utils.general import LOGGER, make_divisible, print_args
+
+
+class TFBN(keras.layers.Layer):
+ # TensorFlow BatchNormalization wrapper
+ def __init__(self, w=None):
+ super().__init__()
+ self.bn = keras.layers.BatchNormalization(
+ beta_initializer=keras.initializers.Constant(w.bias.numpy()),
+ gamma_initializer=keras.initializers.Constant(w.weight.numpy()),
+ moving_mean_initializer=keras.initializers.Constant(w.running_mean.numpy()),
+ moving_variance_initializer=keras.initializers.Constant(w.running_var.numpy()),
+ epsilon=w.eps)
+
+ def call(self, inputs):
+ return self.bn(inputs)
+
+
+class TFPad(keras.layers.Layer):
+ # Pad inputs in spatial dimensions 1 and 2
+ def __init__(self, pad):
+ super().__init__()
+ if isinstance(pad, int):
+ self.pad = tf.constant([[0, 0], [pad, pad], [pad, pad], [0, 0]])
+ else: # tuple/list
+ self.pad = tf.constant([[0, 0], [pad[0], pad[0]], [pad[1], pad[1]], [0, 0]])
+
+ def call(self, inputs):
+ return tf.pad(inputs, self.pad, mode='constant', constant_values=0)
+
+
+class TFConv(keras.layers.Layer):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert g == 1, "TF v2.2 Conv2D does not support 'groups' argument"
+ # TensorFlow convolution padding is inconsistent with PyTorch (e.g. k=3 s=2 'SAME' padding)
+ # see https://stackoverflow.com/questions/52975843/comparing-conv2d-with-padding-between-tensorflow-and-pytorch
+ conv = keras.layers.Conv2D(
+ filters=c2,
+ kernel_size=k,
+ strides=s,
+ padding='SAME' if s == 1 else 'VALID',
+ use_bias=not hasattr(w, 'bn'),
+ kernel_initializer=keras.initializers.Constant(w.conv.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer='zeros' if hasattr(w, 'bn') else keras.initializers.Constant(w.conv.bias.numpy()))
+ self.conv = conv if s == 1 else keras.Sequential([TFPad(autopad(k, p)), conv])
+ self.bn = TFBN(w.bn) if hasattr(w, 'bn') else tf.identity
+ self.act = activations(w.act) if act else tf.identity
+
+ def call(self, inputs):
+ return self.act(self.bn(self.conv(inputs)))
+
+
+class TFDWConv(keras.layers.Layer):
+ # Depthwise convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, act=True, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert c2 % c1 == 0, f'TFDWConv() output={c2} must be a multiple of input={c1} channels'
+ conv = keras.layers.DepthwiseConv2D(
+ kernel_size=k,
+ depth_multiplier=c2 // c1,
+ strides=s,
+ padding='SAME' if s == 1 else 'VALID',
+ use_bias=not hasattr(w, 'bn'),
+ depthwise_initializer=keras.initializers.Constant(w.conv.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer='zeros' if hasattr(w, 'bn') else keras.initializers.Constant(w.conv.bias.numpy()))
+ self.conv = conv if s == 1 else keras.Sequential([TFPad(autopad(k, p)), conv])
+ self.bn = TFBN(w.bn) if hasattr(w, 'bn') else tf.identity
+ self.act = activations(w.act) if act else tf.identity
+
+ def call(self, inputs):
+ return self.act(self.bn(self.conv(inputs)))
+
+
+class TFDWConvTranspose2d(keras.layers.Layer):
+ # Depthwise ConvTranspose2d
+ def __init__(self, c1, c2, k=1, s=1, p1=0, p2=0, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert c1 == c2, f'TFDWConv() output={c2} must be equal to input={c1} channels'
+ assert k == 4 and p1 == 1, 'TFDWConv() only valid for k=4 and p1=1'
+ weight, bias = w.weight.permute(2, 3, 1, 0).numpy(), w.bias.numpy()
+ self.c1 = c1
+ self.conv = [
+ keras.layers.Conv2DTranspose(filters=1,
+ kernel_size=k,
+ strides=s,
+ padding='VALID',
+ output_padding=p2,
+ use_bias=True,
+ kernel_initializer=keras.initializers.Constant(weight[..., i:i + 1]),
+ bias_initializer=keras.initializers.Constant(bias[i])) for i in range(c1)]
+
+ def call(self, inputs):
+ return tf.concat([m(x) for m, x in zip(self.conv, tf.split(inputs, self.c1, 3))], 3)[:, 1:-1, 1:-1]
+
+
+class TFFocus(keras.layers.Layer):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True, w=None):
+ # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = TFConv(c1 * 4, c2, k, s, p, g, act, w.conv)
+
+ def call(self, inputs): # x(b,w,h,c) -> y(b,w/2,h/2,4c)
+ # inputs = inputs / 255 # normalize 0-255 to 0-1
+ inputs = [inputs[:, ::2, ::2, :], inputs[:, 1::2, ::2, :], inputs[:, ::2, 1::2, :], inputs[:, 1::2, 1::2, :]]
+ return self.conv(tf.concat(inputs, 3))
+
+
+class TFBottleneck(keras.layers.Layer):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5, w=None): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_, c2, 3, 1, g=g, w=w.cv2)
+ self.add = shortcut and c1 == c2
+
+ def call(self, inputs):
+ return inputs + self.cv2(self.cv1(inputs)) if self.add else self.cv2(self.cv1(inputs))
+
+
+class TFCrossConv(keras.layers.Layer):
+ # Cross Convolution
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False, w=None):
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, (1, k), (1, s), w=w.cv1)
+ self.cv2 = TFConv(c_, c2, (k, 1), (s, 1), g=g, w=w.cv2)
+ self.add = shortcut and c1 == c2
+
+ def call(self, inputs):
+ return inputs + self.cv2(self.cv1(inputs)) if self.add else self.cv2(self.cv1(inputs))
+
+
+class TFConv2d(keras.layers.Layer):
+ # Substitution for PyTorch nn.Conv2D
+ def __init__(self, c1, c2, k, s=1, g=1, bias=True, w=None):
+ super().__init__()
+ assert g == 1, "TF v2.2 Conv2D does not support 'groups' argument"
+ self.conv = keras.layers.Conv2D(filters=c2,
+ kernel_size=k,
+ strides=s,
+ padding='VALID',
+ use_bias=bias,
+ kernel_initializer=keras.initializers.Constant(
+ w.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer=keras.initializers.Constant(w.bias.numpy()) if bias else None)
+
+ def call(self, inputs):
+ return self.conv(inputs)
+
+
+class TFBottleneckCSP(keras.layers.Layer):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv2d(c1, c_, 1, 1, bias=False, w=w.cv2)
+ self.cv3 = TFConv2d(c_, c_, 1, 1, bias=False, w=w.cv3)
+ self.cv4 = TFConv(2 * c_, c2, 1, 1, w=w.cv4)
+ self.bn = TFBN(w.bn)
+ self.act = lambda x: keras.activations.swish(x)
+ self.m = keras.Sequential([TFBottleneck(c_, c_, shortcut, g, e=1.0, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ y1 = self.cv3(self.m(self.cv1(inputs)))
+ y2 = self.cv2(inputs)
+ return self.cv4(self.act(self.bn(tf.concat((y1, y2), axis=3))))
+
+
+class TFC3(keras.layers.Layer):
+ # CSP Bottleneck with 3 convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c1, c_, 1, 1, w=w.cv2)
+ self.cv3 = TFConv(2 * c_, c2, 1, 1, w=w.cv3)
+ self.m = keras.Sequential([TFBottleneck(c_, c_, shortcut, g, e=1.0, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ return self.cv3(tf.concat((self.m(self.cv1(inputs)), self.cv2(inputs)), axis=3))
+
+
+class TFC3x(keras.layers.Layer):
+ # 3 module with cross-convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c1, c_, 1, 1, w=w.cv2)
+ self.cv3 = TFConv(2 * c_, c2, 1, 1, w=w.cv3)
+ self.m = keras.Sequential([
+ TFCrossConv(c_, c_, k=3, s=1, g=g, e=1.0, shortcut=shortcut, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ return self.cv3(tf.concat((self.m(self.cv1(inputs)), self.cv2(inputs)), axis=3))
+
+
+class TFSPP(keras.layers.Layer):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, k=(5, 9, 13), w=None):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_ * (len(k) + 1), c2, 1, 1, w=w.cv2)
+ self.m = [keras.layers.MaxPool2D(pool_size=x, strides=1, padding='SAME') for x in k]
+
+ def call(self, inputs):
+ x = self.cv1(inputs)
+ return self.cv2(tf.concat([x] + [m(x) for m in self.m], 3))
+
+
+class TFSPPF(keras.layers.Layer):
+ # Spatial pyramid pooling-Fast layer
+ def __init__(self, c1, c2, k=5, w=None):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_ * 4, c2, 1, 1, w=w.cv2)
+ self.m = keras.layers.MaxPool2D(pool_size=k, strides=1, padding='SAME')
+
+ def call(self, inputs):
+ x = self.cv1(inputs)
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(tf.concat([x, y1, y2, self.m(y2)], 3))
+
+
+class TFDetect(keras.layers.Layer):
+ # TF YOLOv5 Detect layer
+ def __init__(self, nc=80, anchors=(), ch=(), imgsz=(640, 640), w=None): # detection layer
+ super().__init__()
+ self.stride = tf.convert_to_tensor(w.stride.numpy(), dtype=tf.float32)
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [tf.zeros(1)] * self.nl # init grid
+ self.anchors = tf.convert_to_tensor(w.anchors.numpy(), dtype=tf.float32)
+ self.anchor_grid = tf.reshape(self.anchors * tf.reshape(self.stride, [self.nl, 1, 1]), [self.nl, 1, -1, 1, 2])
+ self.m = [TFConv2d(x, self.no * self.na, 1, w=w.m[i]) for i, x in enumerate(ch)]
+ self.training = False # set to False after building model
+ self.imgsz = imgsz
+ for i in range(self.nl):
+ ny, nx = self.imgsz[0] // self.stride[i], self.imgsz[1] // self.stride[i]
+ self.grid[i] = self._make_grid(nx, ny)
+
+ def call(self, inputs):
+ z = [] # inference output
+ x = []
+ for i in range(self.nl):
+ x.append(self.m[i](inputs[i]))
+ # x(bs,20,20,255) to x(bs,3,20,20,85)
+ ny, nx = self.imgsz[0] // self.stride[i], self.imgsz[1] // self.stride[i]
+ x[i] = tf.reshape(x[i], [-1, ny * nx, self.na, self.no])
+
+ if not self.training: # inference
+ y = tf.sigmoid(x[i])
+ grid = tf.transpose(self.grid[i], [0, 2, 1, 3]) - 0.5
+ anchor_grid = tf.transpose(self.anchor_grid[i], [0, 2, 1, 3]) * 4
+ xy = (y[..., 0:2] * 2 + grid) * self.stride[i] # xy
+ wh = y[..., 2:4] ** 2 * anchor_grid
+ # Normalize xywh to 0-1 to reduce calibration error
+ xy /= tf.constant([[self.imgsz[1], self.imgsz[0]]], dtype=tf.float32)
+ wh /= tf.constant([[self.imgsz[1], self.imgsz[0]]], dtype=tf.float32)
+ y = tf.concat([xy, wh, y[..., 4:]], -1)
+ z.append(tf.reshape(y, [-1, self.na * ny * nx, self.no]))
+
+ return tf.transpose(x, [0, 2, 1, 3]) if self.training else (tf.concat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ # yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ # return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+ xv, yv = tf.meshgrid(tf.range(nx), tf.range(ny))
+ return tf.cast(tf.reshape(tf.stack([xv, yv], 2), [1, 1, ny * nx, 2]), dtype=tf.float32)
+
+
+class TFUpsample(keras.layers.Layer):
+ # TF version of torch.nn.Upsample()
+ def __init__(self, size, scale_factor, mode, w=None): # warning: all arguments needed including 'w'
+ super().__init__()
+ assert scale_factor == 2, "scale_factor must be 2"
+ self.upsample = lambda x: tf.image.resize(x, (x.shape[1] * 2, x.shape[2] * 2), method=mode)
+ # self.upsample = keras.layers.UpSampling2D(size=scale_factor, interpolation=mode)
+ # with default arguments: align_corners=False, half_pixel_centers=False
+ # self.upsample = lambda x: tf.raw_ops.ResizeNearestNeighbor(images=x,
+ # size=(x.shape[1] * 2, x.shape[2] * 2))
+
+ def call(self, inputs):
+ return self.upsample(inputs)
+
+
+class TFConcat(keras.layers.Layer):
+ # TF version of torch.concat()
+ def __init__(self, dimension=1, w=None):
+ super().__init__()
+ assert dimension == 1, "convert only NCHW to NHWC concat"
+ self.d = 3
+
+ def call(self, inputs):
+ return tf.concat(inputs, self.d)
+
+
+def parse_model(d, ch, model, imgsz): # model_dict, input_channels(3)
+ LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m_str = m
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ try:
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+ except NameError:
+ pass
+
+ n = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in [
+ nn.Conv2d, Conv, DWConv, DWConvTranspose2d, Bottleneck, SPP, SPPF, MixConv2d, Focus, CrossConv,
+ BottleneckCSP, C3, C3x]:
+ c1, c2 = ch[f], args[0]
+ c2 = make_divisible(c2 * gw, 8) if c2 != no else c2
+
+ args = [c1, c2, *args[1:]]
+ if m in [BottleneckCSP, C3, C3x]:
+ args.insert(2, n)
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum(ch[-1 if x == -1 else x + 1] for x in f)
+ elif m is Detect:
+ args.append([ch[x + 1] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ args.append(imgsz)
+ else:
+ c2 = ch[f]
+
+ tf_m = eval('TF' + m_str.replace('nn.', ''))
+ m_ = keras.Sequential([tf_m(*args, w=model.model[i][j]) for j in range(n)]) if n > 1 \
+ else tf_m(*args, w=model.model[i]) # module
+
+ torch_m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum(x.numel() for x in torch_m_.parameters()) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ LOGGER.info(f'{i:>3}{str(f):>18}{str(n):>3}{np:>10} {t:<40}{str(args):<30}') # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ ch.append(c2)
+ return keras.Sequential(layers), sorted(save)
+
+
+class TFModel:
+ # TF YOLOv5 model
+ def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None, model=None, imgsz=(640, 640)): # model, channels, classes
+ super().__init__()
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg) as f:
+ self.yaml = yaml.load(f, Loader=yaml.FullLoader) # model dict
+
+ # Define model
+ if nc and nc != self.yaml['nc']:
+ LOGGER.info(f"Overriding {cfg} nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ self.model, self.savelist = parse_model(deepcopy(self.yaml), ch=[ch], model=model, imgsz=imgsz)
+
+ def predict(self,
+ inputs,
+ tf_nms=False,
+ agnostic_nms=False,
+ topk_per_class=100,
+ topk_all=100,
+ iou_thres=0.45,
+ conf_thres=0.25):
+ y = [] # outputs
+ x = inputs
+ for m in self.model.layers:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+
+ x = m(x) # run
+ y.append(x if m.i in self.savelist else None) # save output
+
+ # Add TensorFlow NMS
+ if tf_nms:
+ boxes = self._xywh2xyxy(x[0][..., :4])
+ probs = x[0][:, :, 4:5]
+ classes = x[0][:, :, 5:]
+ scores = probs * classes
+ if agnostic_nms:
+ nms = AgnosticNMS()((boxes, classes, scores), topk_all, iou_thres, conf_thres)
+ else:
+ boxes = tf.expand_dims(boxes, 2)
+ nms = tf.image.combined_non_max_suppression(boxes,
+ scores,
+ topk_per_class,
+ topk_all,
+ iou_thres,
+ conf_thres,
+ clip_boxes=False)
+ return nms, x[1]
+ return x[0] # output only first tensor [1,6300,85] = [xywh, conf, class0, class1, ...]
+ # x = x[0][0] # [x(1,6300,85), ...] to x(6300,85)
+ # xywh = x[..., :4] # x(6300,4) boxes
+ # conf = x[..., 4:5] # x(6300,1) confidences
+ # cls = tf.reshape(tf.cast(tf.argmax(x[..., 5:], axis=1), tf.float32), (-1, 1)) # x(6300,1) classes
+ # return tf.concat([conf, cls, xywh], 1)
+
+ @staticmethod
+ def _xywh2xyxy(xywh):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ x, y, w, h = tf.split(xywh, num_or_size_splits=4, axis=-1)
+ return tf.concat([x - w / 2, y - h / 2, x + w / 2, y + h / 2], axis=-1)
+
+
+class AgnosticNMS(keras.layers.Layer):
+ # TF Agnostic NMS
+ def call(self, input, topk_all, iou_thres, conf_thres):
+ # wrap map_fn to avoid TypeSpec related error https://stackoverflow.com/a/65809989/3036450
+ return tf.map_fn(lambda x: self._nms(x, topk_all, iou_thres, conf_thres),
+ input,
+ fn_output_signature=(tf.float32, tf.float32, tf.float32, tf.int32),
+ name='agnostic_nms')
+
+ @staticmethod
+ def _nms(x, topk_all=100, iou_thres=0.45, conf_thres=0.25): # agnostic NMS
+ boxes, classes, scores = x
+ class_inds = tf.cast(tf.argmax(classes, axis=-1), tf.float32)
+ scores_inp = tf.reduce_max(scores, -1)
+ selected_inds = tf.image.non_max_suppression(boxes,
+ scores_inp,
+ max_output_size=topk_all,
+ iou_threshold=iou_thres,
+ score_threshold=conf_thres)
+ selected_boxes = tf.gather(boxes, selected_inds)
+ padded_boxes = tf.pad(selected_boxes,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]], [0, 0]],
+ mode="CONSTANT",
+ constant_values=0.0)
+ selected_scores = tf.gather(scores_inp, selected_inds)
+ padded_scores = tf.pad(selected_scores,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]]],
+ mode="CONSTANT",
+ constant_values=-1.0)
+ selected_classes = tf.gather(class_inds, selected_inds)
+ padded_classes = tf.pad(selected_classes,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]]],
+ mode="CONSTANT",
+ constant_values=-1.0)
+ valid_detections = tf.shape(selected_inds)[0]
+ return padded_boxes, padded_scores, padded_classes, valid_detections
+
+
+def activations(act=nn.SiLU):
+ # Returns TF activation from input PyTorch activation
+ if isinstance(act, nn.LeakyReLU):
+ return lambda x: keras.activations.relu(x, alpha=0.1)
+ elif isinstance(act, nn.Hardswish):
+ return lambda x: x * tf.nn.relu6(x + 3) * 0.166666667
+ elif isinstance(act, (nn.SiLU, SiLU)):
+ return lambda x: keras.activations.swish(x)
+ else:
+ raise Exception(f'no matching TensorFlow activation found for PyTorch activation {act}')
+
+
+def representative_dataset_gen(dataset, ncalib=100):
+ # Representative dataset generator for use with converter.representative_dataset, returns a generator of np arrays
+ for n, (path, img, im0s, vid_cap, string) in enumerate(dataset):
+ im = np.transpose(img, [1, 2, 0])
+ im = np.expand_dims(im, axis=0).astype(np.float32)
+ im /= 255
+ yield [im]
+ if n >= ncalib:
+ break
+
+
+def run(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=(640, 640), # inference size h,w
+ batch_size=1, # batch size
+ dynamic=False, # dynamic batch size
+):
+ # PyTorch model
+ im = torch.zeros((batch_size, 3, *imgsz)) # BCHW image
+ model = attempt_load(weights, device=torch.device('cpu'), inplace=True, fuse=False)
+ _ = model(im) # inference
+ model.info()
+
+ # TensorFlow model
+ im = tf.zeros((batch_size, *imgsz, 3)) # BHWC image
+ tf_model = TFModel(cfg=model.yaml, model=model, nc=model.nc, imgsz=imgsz)
+ _ = tf_model.predict(im) # inference
+
+ # Keras model
+ im = keras.Input(shape=(*imgsz, 3), batch_size=None if dynamic else batch_size)
+ keras_model = keras.Model(inputs=im, outputs=tf_model.predict(im))
+ keras_model.summary()
+
+ LOGGER.info('PyTorch, TensorFlow and Keras models successfully verified.\nUse export.py for TF model export.')
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='weights path')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--dynamic', action='store_true', help='dynamic batch size')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/cls/models/yolo.py b/yolov7_seg/cls/models/yolo.py
new file mode 100644
index 000000000..12340b822
--- /dev/null
+++ b/yolov7_seg/cls/models/yolo.py
@@ -0,0 +1,368 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+YOLO-specific modules
+
+Usage:
+ $ python path/to/models/yolo.py --cfg yolov5s.yaml
+"""
+
+import argparse
+import contextlib
+import os
+import platform
+import sys
+from copy import deepcopy
+from pathlib import Path
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+if platform.system() != 'Windows':
+ ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import *
+from models.experimental import *
+from utils.autoanchor import check_anchor_order
+from utils.general import LOGGER, check_version, check_yaml, make_divisible, print_args
+from utils.plots import feature_visualization
+from utils.torch_utils import (fuse_conv_and_bn, initialize_weights, model_info, profile, scale_img, select_device,
+ time_sync)
+
+try:
+ import thop # for FLOPs computation
+except ImportError:
+ thop = None
+
+
+class Detect(nn.Module):
+ stride = None # strides computed during build
+ onnx_dynamic = False # ONNX export parameter
+ export = False # export mode
+
+ def __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layer
+ super().__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ self.anchor_grid = [torch.zeros(1)] * self.nl # init anchor grid
+ self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+ self.inplace = inplace # use inplace ops (e.g. slice assignment)
+
+ def forward(self, x):
+ z = [] # inference output
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
+
+ y = x[i].sigmoid()
+ if self.inplace:
+ y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy
+ wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
+
+ def _make_grid(self, nx=20, ny=20, i=0):
+ d = self.anchors[i].device
+ t = self.anchors[i].dtype
+ shape = 1, self.na, ny, nx, 2 # grid shape
+ y, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)
+ if check_version(torch.__version__, '1.10.0'): # torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibility
+ yv, xv = torch.meshgrid(y, x, indexing='ij')
+ else:
+ yv, xv = torch.meshgrid(y, x)
+ grid = torch.stack((xv, yv), 2).expand(shape) - 0.5 # add grid offset, i.e. y = 2.0 * x - 0.5
+ anchor_grid = (self.anchors[i] * self.stride[i]).view((1, self.na, 1, 1, 2)).expand(shape)
+ return grid, anchor_grid
+
+
+class BaseModel(nn.Module):
+ # YOLOv5 base model
+ def forward(self, x, profile=False, visualize=False):
+ return self._forward_once(x, profile, visualize) # single-scale inference, train
+
+ def _forward_once(self, x, profile=False, visualize=False):
+ y, dt = [], [] # outputs
+ for m in self.model:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+ #if isinstance(m.f, int):
+ # if x is None:
+ # print(len(y))
+ # for yy in y:
+ # print(yy.shape)
+ # print(x.shape)
+ if profile:
+ self._profile_one_layer(m, x, dt)
+ x = m(x) # run
+ y.append(x if m.i in self.save else None) # save output
+ if visualize:
+ feature_visualization(x, m.type, m.i, save_dir=visualize)
+ return x
+
+ def _profile_one_layer(self, m, x, dt):
+ c = m == self.model[-1] # is final layer, copy input as inplace fix
+ o = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPs
+ t = time_sync()
+ for _ in range(10):
+ m(x.copy() if c else x)
+ dt.append((time_sync() - t) * 100)
+ if m == self.model[0]:
+ LOGGER.info(f"{'time (ms)':>10s} {'GFLOPs':>10s} {'params':>10s} module")
+ LOGGER.info(f'{dt[-1]:10.2f} {o:10.2f} {m.np:10.0f} {m.type}')
+ if c:
+ LOGGER.info(f"{sum(dt):10.2f} {'-':>10s} {'-':>10s} Total")
+
+ def fuse(self): # fuse model Conv2d() + BatchNorm2d() layers
+ LOGGER.info('Fusing layers... ')
+ for m in self.model.modules():
+ if isinstance(m, (Conv, DWConv)) and hasattr(m, 'bn'):
+ m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
+ delattr(m, 'bn') # remove batchnorm
+ m.forward = m.forward_fuse # update forward
+ self.info()
+ return self
+
+ def info(self, verbose=False, img_size=640): # print model information
+ model_info(self, verbose, img_size)
+
+ def _apply(self, fn):
+ # Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers
+ self = super()._apply(fn)
+ m = self.model[-1] # Detect()
+ if isinstance(m, Detect):
+ m.stride = fn(m.stride)
+ m.grid = list(map(fn, m.grid))
+ if isinstance(m.anchor_grid, list):
+ m.anchor_grid = list(map(fn, m.anchor_grid))
+ return self
+
+
+class DetectionModel(BaseModel):
+ # YOLOv5 detection model
+ def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classes
+ super().__init__()
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg, encoding='ascii', errors='ignore') as f:
+ self.yaml = yaml.safe_load(f) # model dict
+
+ # Define model
+ ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels
+ if nc and nc != self.yaml['nc']:
+ LOGGER.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ if anchors:
+ LOGGER.info(f'Overriding model.yaml anchors with anchors={anchors}')
+ self.yaml['anchors'] = round(anchors) # override yaml value
+ self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist
+ self.names = [str(i) for i in range(self.yaml['nc'])] # default names
+ self.inplace = self.yaml.get('inplace', True)
+
+ # Build strides, anchors
+ m = self.model[-1] # Detect()
+ if isinstance(m, Detect):
+ s = 256 # 2x min stride
+ m.inplace = self.inplace
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m) # must be in pixel-space (not grid-space)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+
+ # Init weights, biases
+ initialize_weights(self)
+ self.info()
+ LOGGER.info('')
+
+ def forward(self, x, augment=False, profile=False, visualize=False):
+ if augment:
+ return self._forward_augment(x) # augmented inference, None
+ return self._forward_once(x, profile, visualize) # single-scale inference, train
+
+ def _forward_augment(self, x):
+ img_size = x.shape[-2:] # height, width
+ s = [1, 0.83, 0.67] # scales
+ f = [None, 3, None] # flips (2-ud, 3-lr)
+ y = [] # outputs
+ for si, fi in zip(s, f):
+ xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
+ yi = self._forward_once(xi)[0] # forward
+ # cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # save
+ yi = self._descale_pred(yi, fi, si, img_size)
+ y.append(yi)
+ y = self._clip_augmented(y) # clip augmented tails
+ return torch.cat(y, 1), None # augmented inference, train
+
+ def _descale_pred(self, p, flips, scale, img_size):
+ # de-scale predictions following augmented inference (inverse operation)
+ if self.inplace:
+ p[..., :4] /= scale # de-scale
+ if flips == 2:
+ p[..., 1] = img_size[0] - p[..., 1] # de-flip ud
+ elif flips == 3:
+ p[..., 0] = img_size[1] - p[..., 0] # de-flip lr
+ else:
+ x, y, wh = p[..., 0:1] / scale, p[..., 1:2] / scale, p[..., 2:4] / scale # de-scale
+ if flips == 2:
+ y = img_size[0] - y # de-flip ud
+ elif flips == 3:
+ x = img_size[1] - x # de-flip lr
+ p = torch.cat((x, y, wh, p[..., 4:]), -1)
+ return p
+
+ def _clip_augmented(self, y):
+ # Clip YOLOv5 augmented inference tails
+ nl = self.model[-1].nl # number of detection layers (P3-P5)
+ g = sum(4 ** x for x in range(nl)) # grid points
+ e = 1 # exclude layer count
+ i = (y[0].shape[1] // g) * sum(4 ** x for x in range(e)) # indices
+ y[0] = y[0][:, :-i] # large
+ i = (y[-1].shape[1] // g) * sum(4 ** (nl - 1 - x) for x in range(e)) # indices
+ y[-1] = y[-1][:, i:] # small
+ return y
+
+ def _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1).detach() # conv.bias(255) to (3,85)
+ b[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b[:, 5:] += math.log(0.6 / (m.nc - 0.999999)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+
+Model = DetectionModel # retain YOLOv5 'Model' class for backwards compatibility
+
+
+class ClassificationModel(BaseModel):
+ # YOLOv5 classification model
+ def __init__(self, cfg=None, model=None, nc=1000, cutoff=10): # yaml, model, number of classes, cutoff index
+ super().__init__()
+ self.save = []
+ self._from_detection_model(model, nc, cutoff) if model is not None else self._from_yaml(cfg)
+
+ def _from_detection_model(self, model, nc=1000, cutoff=10):
+ # Create a YOLOv5 classification model from a YOLOv5 detection model
+ if isinstance(model, DetectMultiBackend):
+ model = model.model # unwrap DetectMultiBackend
+ model.model = model.model[:cutoff] # backbone
+ m = model.model[-1] # last layer
+ ch = m.conv.in_channels if hasattr(m, 'conv') else m.cv1.conv.in_channels # ch into module
+ c = Classify(ch, nc) # Classify()
+ c.i, c.f, c.type = m.i, m.f, 'models.common.Classify' # index, from, type
+ model.model[-1] = c # replace
+ self.model = model.model
+ self.stride = model.stride
+ #self.save = []
+ self.save = model.save
+ self.nc = nc
+
+ def _from_yaml(self, cfg):
+ # Create a YOLOv5 classification model from a *.yaml file
+ self.model = None
+
+
+def parse_model(d, ch): # model_dict, input_channels(3)
+ LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ with contextlib.suppress(NameError):
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+
+ n = n_ = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in (Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, MixConv2d, Focus, CrossConv,
+ BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x, SPPCSPC):
+ c1, c2 = ch[f], args[0]
+ if c2 != no: # if not output
+ c2 = make_divisible(c2 * gw, 8)
+
+ args = [c1, c2, *args[1:]]
+ if m in [BottleneckCSP, C3, C3TR, C3Ghost, C3x, SPPCSPC]:
+ args.insert(2, n) # number of repeats
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum(ch[x] for x in f)
+ elif m is Detect:
+ args.append([ch[x] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ elif m is Contract:
+ c2 = ch[f] * args[0] ** 2
+ elif m is Expand:
+ c2 = ch[f] // args[0] ** 2
+ else:
+ c2 = ch[f]
+
+ m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum(x.numel() for x in m_.parameters()) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ LOGGER.info(f'{i:>3}{str(f):>18}{n_:>3}{np:10.0f} {t:<40}{str(args):<30}') # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ if i == 0:
+ ch = []
+ ch.append(c2)
+ return nn.Sequential(*layers), sorted(save)
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--cfg', type=str, default='yolov5s.yaml', help='model.yaml')
+ parser.add_argument('--batch-size', type=int, default=1, help='total batch size for all GPUs')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--profile', action='store_true', help='profile model speed')
+ parser.add_argument('--line-profile', action='store_true', help='profile model speed layer by layer')
+ parser.add_argument('--test', action='store_true', help='test all yolo*.yaml')
+ opt = parser.parse_args()
+ opt.cfg = check_yaml(opt.cfg) # check YAML
+ print_args(vars(opt))
+ device = select_device(opt.device)
+
+ # Create model
+ im = torch.rand(opt.batch_size, 3, 640, 640).to(device)
+ model = Model(opt.cfg).to(device)
+
+ # Options
+ if opt.line_profile: # profile layer by layer
+ model(im, profile=True)
+
+ elif opt.profile: # profile forward-backward
+ results = profile(input=im, ops=[model], n=3)
+
+ elif opt.test: # test all models
+ for cfg in Path(ROOT / 'models').rglob('yolo*.yaml'):
+ try:
+ _ = Model(cfg)
+ except Exception as e:
+ print(f'Error in {cfg}: {e}')
+
+ else: # report fused model summary
+ model.fuse()
diff --git a/yolov7_seg/cls/models/yolov7.yaml b/yolov7_seg/cls/models/yolov7.yaml
new file mode 100644
index 000000000..2454ae821
--- /dev/null
+++ b/yolov7_seg/cls/models/yolov7.yaml
@@ -0,0 +1,140 @@
+# parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+
+# anchors
+anchors:
+ - [12,16, 19,36, 40,28] # P3/8
+ - [36,75, 76,55, 72,146] # P4/16
+ - [142,110, 192,243, 459,401] # P5/32
+
+# yolov7 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Conv, [64, 3, 1]],
+
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 1, Conv, [64, 1, 1]],
+ [-2, 1, Conv, [64, 1, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 11
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [128, 1, 1]],
+ [-3, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 16-P3/8
+ [-1, 1, Conv, [128, 1, 1]],
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [512, 1, 1]], # 24
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-3, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 29-P4/16
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [1024, 1, 1]], # 37
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-3, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [512, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 42-P5/32
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [1024, 1, 1]], # 50
+ ]
+
+# yolov7 head
+head:
+ [[-1, 1, SPPCSPC, [512]], # 51
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [37, 1, Conv, [256, 1, 1]], # route backbone P4
+ [[-1, -2], 1, Concat, [1]],
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 63
+
+ [-1, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [24, 1, Conv, [128, 1, 1]], # route backbone P3
+ [[-1, -2], 1, Concat, [1]],
+
+ [-1, 1, Conv, [128, 1, 1]],
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [128, 1, 1]], # 75
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [128, 1, 1]],
+ [-3, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 2]],
+ [[-1, -3, 63], 1, Concat, [1]],
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 88
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-3, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 2]],
+ [[-1, -3, 51], 1, Concat, [1]],
+
+ [-1, 1, Conv, [512, 1, 1]],
+ [-2, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [512, 1, 1]], # 101
+
+ [75, 1, Conv, [256, 3, 1]],
+ [88, 1, Conv, [512, 3, 1]],
+ [101, 1, Conv, [1024, 3, 1]],
+
+ [[102,103,104], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
+ ]
\ No newline at end of file
diff --git a/yolov7_seg/cls/requirements.txt b/yolov7_seg/cls/requirements.txt
new file mode 100644
index 000000000..0f282135e
--- /dev/null
+++ b/yolov7_seg/cls/requirements.txt
@@ -0,0 +1,43 @@
+# YOLOv5 requirements
+# Usage: pip install -r requirements.txt
+
+# Base ----------------------------------------
+matplotlib>=3.2.2
+numpy>=1.18.5
+opencv-python>=4.1.1
+Pillow>=7.1.2
+PyYAML>=5.3.1
+requests>=2.23.0
+scipy>=1.4.1
+torch>=1.7.0
+torchvision>=0.8.1
+tqdm>=4.64.0
+protobuf<=3.20.1 # https://github.com/ultralytics/yolov5/issues/8012
+
+# Logging -------------------------------------
+tensorboard>=2.4.1
+# wandb
+# clearml
+
+# Plotting ------------------------------------
+pandas>=1.1.4
+seaborn>=0.11.0
+
+# Export --------------------------------------
+# coremltools>=5.2 # CoreML export
+# onnx>=1.9.0 # ONNX export
+# onnx-simplifier>=0.4.1 # ONNX simplifier
+# nvidia-pyindex # TensorRT export
+# nvidia-tensorrt # TensorRT export
+# scikit-learn==0.19.2 # CoreML quantization
+# tensorflow>=2.4.1 # TFLite export (or tensorflow-cpu, tensorflow-aarch64)
+# tensorflowjs>=3.9.0 # TF.js export
+# openvino-dev # OpenVINO export
+
+# Extras --------------------------------------
+ipython # interactive notebook
+psutil # system utilization
+thop>=0.1.1 # FLOPs computation
+# albumentations>=1.0.3
+# pycocotools>=2.0 # COCO mAP
+# roboflow
diff --git a/yolov7_seg/cls/setup.cfg b/yolov7_seg/cls/setup.cfg
new file mode 100644
index 000000000..b6b2e1840
--- /dev/null
+++ b/yolov7_seg/cls/setup.cfg
@@ -0,0 +1,59 @@
+# Project-wide configuration file, can be used for package metadata and other toll configurations
+# Example usage: global configuration for PEP8 (via flake8) setting or default pytest arguments
+# Local usage: pip install pre-commit, pre-commit run --all-files
+
+[metadata]
+license_file = LICENSE
+description_file = README.md
+
+
+[tool:pytest]
+norecursedirs =
+ .git
+ dist
+ build
+addopts =
+ --doctest-modules
+ --durations=25
+ --color=yes
+
+
+[flake8]
+max-line-length = 120
+exclude = .tox,*.egg,build,temp
+select = E,W,F
+doctests = True
+verbose = 2
+# https://pep8.readthedocs.io/en/latest/intro.html#error-codes
+format = pylint
+# see: https://www.flake8rules.com/
+ignore =
+ E731 # Do not assign a lambda expression, use a def
+ F405 # name may be undefined, or defined from star imports: module
+ E402 # module level import not at top of file
+ F401 # module imported but unused
+ W504 # line break after binary operator
+ E127 # continuation line over-indented for visual indent
+ W504 # line break after binary operator
+ E231 # missing whitespace after ‘,’, ‘;’, or ‘:’
+ E501 # line too long
+ F403 # ‘from module import *’ used; unable to detect undefined names
+
+
+[isort]
+# https://pycqa.github.io/isort/docs/configuration/options.html
+line_length = 120
+# see: https://pycqa.github.io/isort/docs/configuration/multi_line_output_modes.html
+multi_line_output = 0
+
+
+[yapf]
+based_on_style = pep8
+spaces_before_comment = 2
+COLUMN_LIMIT = 120
+COALESCE_BRACKETS = True
+SPACES_AROUND_POWER_OPERATOR = True
+SPACE_BETWEEN_ENDING_COMMA_AND_CLOSING_BRACKET = False
+SPLIT_BEFORE_CLOSING_BRACKET = False
+SPLIT_BEFORE_FIRST_ARGUMENT = False
+# EACH_DICT_ENTRY_ON_SEPARATE_LINE = False
diff --git a/yolov7_seg/cls/train.py b/yolov7_seg/cls/train.py
new file mode 100644
index 000000000..53f2a5fe9
--- /dev/null
+++ b/yolov7_seg/cls/train.py
@@ -0,0 +1,634 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Train a YOLOv5 model on a custom dataset.
+
+Models and datasets download automatically from the latest YOLOv5 release.
+Models: https://github.com/ultralytics/yolov5/tree/master/models
+Datasets: https://github.com/ultralytics/yolov5/tree/master/data
+Tutorial: https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data
+
+Usage:
+ $ python path/to/train.py --data coco128.yaml --weights yolov5s.pt --img 640 # from pretrained (RECOMMENDED)
+ $ python path/to/train.py --data coco128.yaml --weights '' --cfg yolov5s.yaml --img 640 # from scratch
+"""
+
+import argparse
+import math
+import os
+import random
+import sys
+import time
+from copy import deepcopy
+from datetime import datetime
+from pathlib import Path
+
+import numpy as np
+import torch
+import torch.distributed as dist
+import torch.nn as nn
+import yaml
+from torch.optim import lr_scheduler
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+import val # for end-of-epoch mAP
+from models.experimental import attempt_load
+from models.yolo import Model
+from utils.autoanchor import check_anchors
+from utils.autobatch import check_train_batch_size
+from utils.callbacks import Callbacks
+from utils.dataloaders import create_dataloader
+from utils.downloads import attempt_download, is_url
+from utils.general import (LOGGER, check_amp, check_dataset, check_file, check_git_status, check_img_size,
+ check_requirements, check_suffix, check_yaml, colorstr, get_latest_run, increment_path,
+ init_seeds, intersect_dicts, labels_to_class_weights, labels_to_image_weights, methods,
+ one_cycle, print_args, print_mutation, strip_optimizer)
+from utils.loggers import Loggers
+from utils.loggers.wandb.wandb_utils import check_wandb_resume
+from utils.loss import ComputeLoss
+from utils.metrics import fitness
+from utils.plots import plot_evolve, plot_labels
+from utils.torch_utils import (EarlyStopping, ModelEMA, de_parallel, select_device, smart_DDP, smart_optimizer,
+ smart_resume, torch_distributed_zero_first)
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+
+def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictionary
+ save_dir, epochs, batch_size, weights, single_cls, evolve, data, cfg, resume, noval, nosave, workers, freeze = \
+ Path(opt.save_dir), opt.epochs, opt.batch_size, opt.weights, opt.single_cls, opt.evolve, opt.data, opt.cfg, \
+ opt.resume, opt.noval, opt.nosave, opt.workers, opt.freeze
+ callbacks.run('on_pretrain_routine_start')
+
+ # Directories
+ w = save_dir / 'weights' # weights dir
+ (w.parent if evolve else w).mkdir(parents=True, exist_ok=True) # make dir
+ last, best = w / 'last.pt', w / 'best.pt'
+
+ # Hyperparameters
+ if isinstance(hyp, str):
+ with open(hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ LOGGER.info(colorstr('hyperparameters: ') + ', '.join(f'{k}={v}' for k, v in hyp.items()))
+ opt.hyp = hyp.copy() # for saving hyps to checkpoints
+
+ # Save run settings
+ if not evolve:
+ with open(save_dir / 'hyp.yaml', 'w') as f:
+ yaml.safe_dump(hyp, f, sort_keys=False)
+ with open(save_dir / 'opt.yaml', 'w') as f:
+ yaml.safe_dump(vars(opt), f, sort_keys=False)
+
+ # Loggers
+ data_dict = None
+ if RANK in {-1, 0}:
+ loggers = Loggers(save_dir, weights, opt, hyp, LOGGER) # loggers instance
+ if loggers.clearml:
+ data_dict = loggers.clearml.data_dict # None if no ClearML dataset or filled in by ClearML
+ if loggers.wandb:
+ data_dict = loggers.wandb.data_dict
+ if resume:
+ weights, epochs, hyp, batch_size = opt.weights, opt.epochs, opt.hyp, opt.batch_size
+
+ # Register actions
+ for k in methods(loggers):
+ callbacks.register_action(k, callback=getattr(loggers, k))
+
+ # Config
+ plots = not evolve and not opt.noplots # create plots
+ cuda = device.type != 'cpu'
+ init_seeds(opt.seed + 1 + RANK, deterministic=True)
+ with torch_distributed_zero_first(LOCAL_RANK):
+ data_dict = data_dict or check_dataset(data) # check if None
+ train_path, val_path = data_dict['train'], data_dict['val']
+ nc = 1 if single_cls else int(data_dict['nc']) # number of classes
+ names = ['item'] if single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
+ assert len(names) == nc, f'{len(names)} names found for nc={nc} dataset in {data}' # check
+ is_coco = isinstance(val_path, str) and val_path.endswith('coco/val2017.txt') # COCO dataset
+
+ # Model
+ check_suffix(weights, '.pt') # check weights
+ pretrained = weights.endswith('.pt')
+ if pretrained:
+ with torch_distributed_zero_first(LOCAL_RANK):
+ weights = attempt_download(weights) # download if not found locally
+ ckpt = torch.load(weights, map_location='cpu') # load checkpoint to CPU to avoid CUDA memory leak
+ model = Model(cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ exclude = ['anchor'] if (cfg or hyp.get('anchors')) and not resume else [] # exclude keys
+ csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
+ csd = intersect_dicts(csd, model.state_dict(), exclude=exclude) # intersect
+ model.load_state_dict(csd, strict=False) # load
+ LOGGER.info(f'Transferred {len(csd)}/{len(model.state_dict())} items from {weights}') # report
+ else:
+ model = Model(cfg, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ amp = check_amp(model) # check AMP
+
+ # Freeze
+ freeze = [f'model.{x}.' for x in (freeze if len(freeze) > 1 else range(freeze[0]))] # layers to freeze
+ for k, v in model.named_parameters():
+ v.requires_grad = True # train all layers
+ # v.register_hook(lambda x: torch.nan_to_num(x)) # NaN to 0 (commented for erratic training results)
+ if any(x in k for x in freeze):
+ LOGGER.info(f'freezing {k}')
+ v.requires_grad = False
+
+ # Image size
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ imgsz = check_img_size(opt.imgsz, gs, floor=gs * 2) # verify imgsz is gs-multiple
+
+ # Batch size
+ if RANK == -1 and batch_size == -1: # single-GPU only, estimate best batch size
+ batch_size = check_train_batch_size(model, imgsz, amp)
+ loggers.on_params_update({"batch_size": batch_size})
+
+ # Optimizer
+ nbs = 64 # nominal batch size
+ accumulate = max(round(nbs / batch_size), 1) # accumulate loss before optimizing
+ hyp['weight_decay'] *= batch_size * accumulate / nbs # scale weight_decay
+ optimizer = smart_optimizer(model, opt.optimizer, hyp['lr0'], hyp['momentum'], hyp['weight_decay'])
+
+ # Scheduler
+ if opt.cos_lr:
+ lf = one_cycle(1, hyp['lrf'], epochs) # cosine 1->hyp['lrf']
+ else:
+ lf = lambda x: (1 - x / epochs) * (1.0 - hyp['lrf']) + hyp['lrf'] # linear
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf) # plot_lr_scheduler(optimizer, scheduler, epochs)
+
+ # EMA
+ ema = ModelEMA(model) if RANK in {-1, 0} else None
+
+ # Resume
+ best_fitness, start_epoch = 0.0, 0
+ if pretrained:
+ best_fitness, start_epoch, epochs = smart_resume(ckpt, optimizer, ema, weights, epochs, resume)
+ del ckpt, csd
+
+ # DP mode
+ if cuda and RANK == -1 and torch.cuda.device_count() > 1:
+ LOGGER.warning('WARNING: DP not recommended, use torch.distributed.run for best DDP Multi-GPU results.\n'
+ 'See Multi-GPU Tutorial at https://github.com/ultralytics/yolov5/issues/475 to get started.')
+ model = torch.nn.DataParallel(model)
+
+ # SyncBatchNorm
+ if opt.sync_bn and cuda and RANK != -1:
+ model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
+ LOGGER.info('Using SyncBatchNorm()')
+
+ # Trainloader
+ train_loader, dataset = create_dataloader(train_path,
+ imgsz,
+ batch_size // WORLD_SIZE,
+ gs,
+ single_cls,
+ hyp=hyp,
+ augment=True,
+ cache=None if opt.cache == 'val' else opt.cache,
+ rect=opt.rect,
+ rank=LOCAL_RANK,
+ workers=workers,
+ image_weights=opt.image_weights,
+ quad=opt.quad,
+ prefix=colorstr('train: '),
+ shuffle=True)
+ labels = np.concatenate(dataset.labels, 0)
+ mlc = int(labels[:, 0].max()) # max label class
+ assert mlc < nc, f'Label class {mlc} exceeds nc={nc} in {data}. Possible class labels are 0-{nc - 1}'
+
+ # Process 0
+ if RANK in {-1, 0}:
+ val_loader = create_dataloader(val_path,
+ imgsz,
+ batch_size // WORLD_SIZE * 2,
+ gs,
+ single_cls,
+ hyp=hyp,
+ cache=None if noval else opt.cache,
+ rect=True,
+ rank=-1,
+ workers=workers * 2,
+ pad=0.5,
+ prefix=colorstr('val: '))[0]
+
+ if not resume:
+ if plots:
+ plot_labels(labels, names, save_dir)
+
+ # Anchors
+ if not opt.noautoanchor:
+ check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz)
+ model.half().float() # pre-reduce anchor precision
+
+ callbacks.run('on_pretrain_routine_end')
+
+ # DDP mode
+ if cuda and RANK != -1:
+ model = smart_DDP(model)
+
+ # Model attributes
+ nl = de_parallel(model).model[-1].nl # number of detection layers (to scale hyps)
+ hyp['box'] *= 3 / nl # scale to layers
+ hyp['cls'] *= nc / 80 * 3 / nl # scale to classes and layers
+ hyp['obj'] *= (imgsz / 640) ** 2 * 3 / nl # scale to image size and layers
+ hyp['label_smoothing'] = opt.label_smoothing
+ model.nc = nc # attach number of classes to model
+ model.hyp = hyp # attach hyperparameters to model
+ model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
+ model.names = names
+
+ # Start training
+ t0 = time.time()
+ nb = len(train_loader) # number of batches
+ nw = max(round(hyp['warmup_epochs'] * nb), 100) # number of warmup iterations, max(3 epochs, 100 iterations)
+ # nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
+ last_opt_step = -1
+ maps = np.zeros(nc) # mAP per class
+ results = (0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
+ scheduler.last_epoch = start_epoch - 1 # do not move
+ scaler = torch.cuda.amp.GradScaler(enabled=amp)
+ stopper, stop = EarlyStopping(patience=opt.patience), False
+ compute_loss = ComputeLoss(model) # init loss class
+ callbacks.run('on_train_start')
+ LOGGER.info(f'Image sizes {imgsz} train, {imgsz} val\n'
+ f'Using {train_loader.num_workers * WORLD_SIZE} dataloader workers\n'
+ f"Logging results to {colorstr('bold', save_dir)}\n"
+ f'Starting training for {epochs} epochs...')
+ for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
+ callbacks.run('on_train_epoch_start')
+ model.train()
+
+ # Update image weights (optional, single-GPU only)
+ if opt.image_weights:
+ cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
+ iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
+ dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
+
+ # Update mosaic border (optional)
+ # b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
+ # dataset.mosaic_border = [b - imgsz, -b] # height, width borders
+
+ mloss = torch.zeros(3, device=device) # mean losses
+ if RANK != -1:
+ train_loader.sampler.set_epoch(epoch)
+ pbar = enumerate(train_loader)
+ LOGGER.info(('\n' + '%10s' * 7) % ('Epoch', 'gpu_mem', 'box', 'obj', 'cls', 'labels', 'img_size'))
+ if RANK in {-1, 0}:
+ pbar = tqdm(pbar, total=nb, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ optimizer.zero_grad()
+ for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
+ callbacks.run('on_train_batch_start')
+ ni = i + nb * epoch # number integrated batches (since train start)
+ imgs = imgs.to(device, non_blocking=True).float() / 255 # uint8 to float32, 0-255 to 0.0-1.0
+
+ # Warmup
+ if ni <= nw:
+ xi = [0, nw] # x interp
+ # compute_loss.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
+ accumulate = max(1, np.interp(ni, xi, [1, nbs / batch_size]).round())
+ for j, x in enumerate(optimizer.param_groups):
+ # bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
+ x['lr'] = np.interp(ni, xi, [hyp['warmup_bias_lr'] if j == 0 else 0.0, x['initial_lr'] * lf(epoch)])
+ if 'momentum' in x:
+ x['momentum'] = np.interp(ni, xi, [hyp['warmup_momentum'], hyp['momentum']])
+
+ # Multi-scale
+ if opt.multi_scale:
+ sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
+ sf = sz / max(imgs.shape[2:]) # scale factor
+ if sf != 1:
+ ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
+ imgs = nn.functional.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)
+
+ # Forward
+ with torch.cuda.amp.autocast(amp):
+ pred = model(imgs) # forward
+ loss, loss_items = compute_loss(pred, targets.to(device)) # loss scaled by batch_size
+ if RANK != -1:
+ loss *= WORLD_SIZE # gradient averaged between devices in DDP mode
+ if opt.quad:
+ loss *= 4.
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize - https://pytorch.org/docs/master/notes/amp_examples.html
+ if ni - last_opt_step >= accumulate:
+ scaler.unscale_(optimizer) # unscale gradients
+ torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=10.0) # clip gradients
+ scaler.step(optimizer) # optimizer.step
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+ last_opt_step = ni
+
+ # Log
+ if RANK in {-1, 0}:
+ mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
+ mem = f'{torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0:.3g}G' # (GB)
+ pbar.set_description(('%10s' * 2 + '%10.4g' * 5) %
+ (f'{epoch}/{epochs - 1}', mem, *mloss, targets.shape[0], imgs.shape[-1]))
+ callbacks.run('on_train_batch_end', ni, model, imgs, targets, paths, plots)
+ if callbacks.stop_training:
+ return
+ # end batch ------------------------------------------------------------------------------------------------
+
+ # Scheduler
+ lr = [x['lr'] for x in optimizer.param_groups] # for loggers
+ scheduler.step()
+
+ if RANK in {-1, 0}:
+ # mAP
+ callbacks.run('on_train_epoch_end', epoch=epoch)
+ ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'names', 'stride', 'class_weights'])
+ final_epoch = (epoch + 1 == epochs) or stopper.possible_stop
+ if not noval or final_epoch: # Calculate mAP
+ results, maps, _ = val.run(data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ half=amp,
+ model=ema.ema,
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ plots=False,
+ callbacks=callbacks,
+ compute_loss=compute_loss)
+
+ # Update best mAP
+ fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
+ stop = stopper(epoch=epoch, fitness=fi) # early stop check
+ if fi > best_fitness:
+ best_fitness = fi
+ log_vals = list(mloss) + list(results) + lr
+ callbacks.run('on_fit_epoch_end', log_vals, epoch, best_fitness, fi)
+
+ # Save model
+ if (not nosave) or (final_epoch and not evolve): # if save
+ ckpt = {
+ 'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'model': deepcopy(de_parallel(model)).half(),
+ 'ema': deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': optimizer.state_dict(),
+ 'wandb_id': loggers.wandb.wandb_run.id if loggers.wandb else None,
+ 'opt': vars(opt),
+ 'date': datetime.now().isoformat()}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fi:
+ torch.save(ckpt, best)
+ if opt.save_period > 0 and epoch % opt.save_period == 0:
+ torch.save(ckpt, w / f'epoch{epoch}.pt')
+ del ckpt
+ callbacks.run('on_model_save', last, epoch, final_epoch, best_fitness, fi)
+
+ # EarlyStopping
+ if RANK != -1: # if DDP training
+ broadcast_list = [stop if RANK == 0 else None]
+ dist.broadcast_object_list(broadcast_list, 0) # broadcast 'stop' to all ranks
+ if RANK != 0:
+ stop = broadcast_list[0]
+ if stop:
+ break # must break all DDP ranks
+
+ # end epoch ----------------------------------------------------------------------------------------------------
+ # end training -----------------------------------------------------------------------------------------------------
+ if RANK in {-1, 0}:
+ LOGGER.info(f'\n{epoch - start_epoch + 1} epochs completed in {(time.time() - t0) / 3600:.3f} hours.')
+ for f in last, best:
+ if f.exists():
+ strip_optimizer(f) # strip optimizers
+ if f is best:
+ LOGGER.info(f'\nValidating {f}...')
+ results, _, _ = val.run(
+ data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ model=attempt_load(f, device).half(),
+ iou_thres=0.65 if is_coco else 0.60, # best pycocotools results at 0.65
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ save_json=is_coco,
+ verbose=True,
+ plots=plots,
+ callbacks=callbacks,
+ compute_loss=compute_loss) # val best model with plots
+ if is_coco:
+ callbacks.run('on_fit_epoch_end', list(mloss) + list(results) + lr, epoch, best_fitness, fi)
+
+ callbacks.run('on_train_end', last, best, plots, epoch, results)
+
+ torch.cuda.empty_cache()
+ return results
+
+
+def parse_opt(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch-low.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300)
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--noval', action='store_true', help='only validate final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable AutoAnchor')
+ parser.add_argument('--noplots', action='store_true', help='save no plot files')
+ parser.add_argument('--evolve', type=int, nargs='?', const=300, help='evolve hyperparameters for x generations')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--optimizer', type=str, choices=['SGD', 'Adam', 'AdamW'], default='SGD', help='optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default=ROOT / 'runs/train', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--cos-lr', action='store_true', help='cosine LR scheduler')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--patience', type=int, default=100, help='EarlyStopping patience (epochs without improvement)')
+ parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone=10, first3=0 1 2')
+ parser.add_argument('--save-period', type=int, default=-1, help='Save checkpoint every x epochs (disabled if < 1)')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+
+ # Weights & Biases arguments
+ parser.add_argument('--entity', default=None, help='W&B: Entity')
+ parser.add_argument('--upload_dataset', nargs='?', const=True, default=False, help='W&B: Upload data, "val" option')
+ parser.add_argument('--bbox_interval', type=int, default=-1, help='W&B: Set bounding-box image logging interval')
+ parser.add_argument('--artifact_alias', type=str, default='latest', help='W&B: Version of dataset artifact to use')
+
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def main(opt, callbacks=Callbacks()):
+ # Checks
+ if RANK in {-1, 0}:
+ print_args(vars(opt))
+ check_git_status()
+ check_requirements()
+
+ # Resume
+ if opt.resume and not (check_wandb_resume(opt) or opt.evolve): # resume from specified or most recent last.pt
+ last = Path(check_file(opt.resume) if isinstance(opt.resume, str) else get_latest_run())
+ opt_yaml = last.parent.parent / 'opt.yaml' # train options yaml
+ opt_data = opt.data # original dataset
+ if opt_yaml.is_file():
+ with open(opt_yaml, errors='ignore') as f:
+ d = yaml.safe_load(f)
+ else:
+ d = torch.load(last, map_location='cpu')['opt']
+ opt = argparse.Namespace(**d) # replace
+ opt.cfg, opt.weights, opt.resume = '', str(last), True # reinstate
+ if is_url(opt_data):
+ opt.data = check_file(opt_data) # avoid HUB resume auth timeout
+ else:
+ opt.data, opt.cfg, opt.hyp, opt.weights, opt.project = \
+ check_file(opt.data), check_yaml(opt.cfg), check_yaml(opt.hyp), str(opt.weights), str(opt.project) # checks
+ assert len(opt.cfg) or len(opt.weights), 'either --cfg or --weights must be specified'
+ if opt.evolve:
+ if opt.project == str(ROOT / 'runs/train'): # if default project name, rename to runs/evolve
+ opt.project = str(ROOT / 'runs/evolve')
+ opt.exist_ok, opt.resume = opt.resume, False # pass resume to exist_ok and disable resume
+ if opt.name == 'cfg':
+ opt.name = Path(opt.cfg).stem # use model.yaml as name
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok))
+
+ # DDP mode
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if LOCAL_RANK != -1:
+ msg = 'is not compatible with YOLOv5 Multi-GPU DDP training'
+ assert not opt.image_weights, f'--image-weights {msg}'
+ assert not opt.evolve, f'--evolve {msg}'
+ assert opt.batch_size != -1, f'AutoBatch with --batch-size -1 {msg}, please pass a valid --batch-size'
+ assert opt.batch_size % WORLD_SIZE == 0, f'--batch-size {opt.batch_size} must be multiple of WORLD_SIZE'
+ assert torch.cuda.device_count() > LOCAL_RANK, 'insufficient CUDA devices for DDP command'
+ torch.cuda.set_device(LOCAL_RANK)
+ device = torch.device('cuda', LOCAL_RANK)
+ dist.init_process_group(backend="nccl" if dist.is_nccl_available() else "gloo")
+
+ # Train
+ if not opt.evolve:
+ train(opt.hyp, opt, device, callbacks)
+ if WORLD_SIZE > 1 and RANK == 0:
+ LOGGER.info('Destroying process group... ')
+ dist.destroy_process_group()
+
+ # Evolve hyperparameters (optional)
+ else:
+ # Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)
+ meta = {
+ 'lr0': (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
+ 'lrf': (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
+ 'momentum': (0.3, 0.6, 0.98), # SGD momentum/Adam beta1
+ 'weight_decay': (1, 0.0, 0.001), # optimizer weight decay
+ 'warmup_epochs': (1, 0.0, 5.0), # warmup epochs (fractions ok)
+ 'warmup_momentum': (1, 0.0, 0.95), # warmup initial momentum
+ 'warmup_bias_lr': (1, 0.0, 0.2), # warmup initial bias lr
+ 'box': (1, 0.02, 0.2), # box loss gain
+ 'cls': (1, 0.2, 4.0), # cls loss gain
+ 'cls_pw': (1, 0.5, 2.0), # cls BCELoss positive_weight
+ 'obj': (1, 0.2, 4.0), # obj loss gain (scale with pixels)
+ 'obj_pw': (1, 0.5, 2.0), # obj BCELoss positive_weight
+ 'iou_t': (0, 0.1, 0.7), # IoU training threshold
+ 'anchor_t': (1, 2.0, 8.0), # anchor-multiple threshold
+ 'anchors': (2, 2.0, 10.0), # anchors per output grid (0 to ignore)
+ 'fl_gamma': (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
+ 'hsv_h': (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
+ 'hsv_s': (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
+ 'hsv_v': (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)
+ 'degrees': (1, 0.0, 45.0), # image rotation (+/- deg)
+ 'translate': (1, 0.0, 0.9), # image translation (+/- fraction)
+ 'scale': (1, 0.0, 0.9), # image scale (+/- gain)
+ 'shear': (1, 0.0, 10.0), # image shear (+/- deg)
+ 'perspective': (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
+ 'flipud': (1, 0.0, 1.0), # image flip up-down (probability)
+ 'fliplr': (0, 0.0, 1.0), # image flip left-right (probability)
+ 'mosaic': (1, 0.0, 1.0), # image mixup (probability)
+ 'mixup': (1, 0.0, 1.0), # image mixup (probability)
+ 'copy_paste': (1, 0.0, 1.0)} # segment copy-paste (probability)
+
+ with open(opt.hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ if 'anchors' not in hyp: # anchors commented in hyp.yaml
+ hyp['anchors'] = 3
+ opt.noval, opt.nosave, save_dir = True, True, Path(opt.save_dir) # only val/save final epoch
+ # ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
+ evolve_yaml, evolve_csv = save_dir / 'hyp_evolve.yaml', save_dir / 'evolve.csv'
+ if opt.bucket:
+ os.system(f'gsutil cp gs://{opt.bucket}/evolve.csv {evolve_csv}') # download evolve.csv if exists
+
+ for _ in range(opt.evolve): # generations to evolve
+ if evolve_csv.exists(): # if evolve.csv exists: select best hyps and mutate
+ # Select parent(s)
+ parent = 'single' # parent selection method: 'single' or 'weighted'
+ x = np.loadtxt(evolve_csv, ndmin=2, delimiter=',', skiprows=1)
+ n = min(5, len(x)) # number of previous results to consider
+ x = x[np.argsort(-fitness(x))][:n] # top n mutations
+ w = fitness(x) - fitness(x).min() + 1E-6 # weights (sum > 0)
+ if parent == 'single' or len(x) == 1:
+ # x = x[random.randint(0, n - 1)] # random selection
+ x = x[random.choices(range(n), weights=w)[0]] # weighted selection
+ elif parent == 'weighted':
+ x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
+
+ # Mutate
+ mp, s = 0.8, 0.2 # mutation probability, sigma
+ npr = np.random
+ npr.seed(int(time.time()))
+ g = np.array([meta[k][0] for k in hyp.keys()]) # gains 0-1
+ ng = len(meta)
+ v = np.ones(ng)
+ while all(v == 1): # mutate until a change occurs (prevent duplicates)
+ v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
+ for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
+ hyp[k] = float(x[i + 7] * v[i]) # mutate
+
+ # Constrain to limits
+ for k, v in meta.items():
+ hyp[k] = max(hyp[k], v[1]) # lower limit
+ hyp[k] = min(hyp[k], v[2]) # upper limit
+ hyp[k] = round(hyp[k], 5) # significant digits
+
+ # Train mutation
+ results = train(hyp.copy(), opt, device, callbacks)
+ callbacks = Callbacks()
+ # Write mutation results
+ print_mutation(results, hyp.copy(), save_dir, opt.bucket)
+
+ # Plot results
+ plot_evolve(evolve_csv)
+ LOGGER.info(f'Hyperparameter evolution finished {opt.evolve} generations\n'
+ f"Results saved to {colorstr('bold', save_dir)}\n"
+ f'Usage example: $ python train.py --hyp {evolve_yaml}')
+
+
+def run(**kwargs):
+ # Usage: import train; train.run(data='coco128.yaml', imgsz=320, weights='yolov5m.pt')
+ opt = parse_opt(True)
+ for k, v in kwargs.items():
+ setattr(opt, k, v)
+ main(opt)
+ return opt
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/cls/utils/__init__.py b/yolov7_seg/cls/utils/__init__.py
new file mode 100644
index 000000000..a63c473a4
--- /dev/null
+++ b/yolov7_seg/cls/utils/__init__.py
@@ -0,0 +1,36 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+utils/initialization
+"""
+
+
+def notebook_init(verbose=True):
+ # Check system software and hardware
+ print('Checking setup...')
+
+ import os
+ import shutil
+
+ from utils.general import check_requirements, emojis, is_colab
+ from utils.torch_utils import select_device # imports
+
+ check_requirements(('psutil', 'IPython'))
+ import psutil
+ from IPython import display # to display images and clear console output
+
+ if is_colab():
+ shutil.rmtree('/content/sample_data', ignore_errors=True) # remove colab /sample_data directory
+
+ # System info
+ if verbose:
+ gb = 1 << 30 # bytes to GiB (1024 ** 3)
+ ram = psutil.virtual_memory().total
+ total, used, free = shutil.disk_usage("/")
+ display.clear_output()
+ s = f'({os.cpu_count()} CPUs, {ram / gb:.1f} GB RAM, {(total - free) / gb:.1f}/{total / gb:.1f} GB disk)'
+ else:
+ s = ''
+
+ select_device(newline=False)
+ print(emojis(f'Setup complete ✅ {s}'))
+ return display
diff --git a/yolov7_seg/cls/utils/activations.py b/yolov7_seg/cls/utils/activations.py
new file mode 100644
index 000000000..03d394e11
--- /dev/null
+++ b/yolov7_seg/cls/utils/activations.py
@@ -0,0 +1,103 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Activation functions
+"""
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+
+class SiLU(nn.Module):
+ # SiLU activation https://arxiv.org/pdf/1606.08415.pdf
+ @staticmethod
+ def forward(x):
+ return x * torch.sigmoid(x)
+
+
+class Hardswish(nn.Module):
+ # Hard-SiLU activation
+ @staticmethod
+ def forward(x):
+ # return x * F.hardsigmoid(x) # for TorchScript and CoreML
+ return x * F.hardtanh(x + 3, 0.0, 6.0) / 6.0 # for TorchScript, CoreML and ONNX
+
+
+class Mish(nn.Module):
+ # Mish activation https://github.com/digantamisra98/Mish
+ @staticmethod
+ def forward(x):
+ return x * F.softplus(x).tanh()
+
+
+class MemoryEfficientMish(nn.Module):
+ # Mish activation memory-efficient
+ class F(torch.autograd.Function):
+
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ fx = F.softplus(x).tanh()
+ return grad_output * (fx + x * sx * (1 - fx * fx))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+class FReLU(nn.Module):
+ # FReLU activation https://arxiv.org/abs/2007.11824
+ def __init__(self, c1, k=3): # ch_in, kernel
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
+ self.bn = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ return torch.max(x, self.bn(self.conv(x)))
+
+
+class AconC(nn.Module):
+ r""" ACON activation (activate or not)
+ AconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is a learnable parameter
+ according to "Activate or Not: Learning Customized Activation" .
+ """
+
+ def __init__(self, c1):
+ super().__init__()
+ self.p1 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.p2 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.beta = nn.Parameter(torch.ones(1, c1, 1, 1))
+
+ def forward(self, x):
+ dpx = (self.p1 - self.p2) * x
+ return dpx * torch.sigmoid(self.beta * dpx) + self.p2 * x
+
+
+class MetaAconC(nn.Module):
+ r""" ACON activation (activate or not)
+ MetaAconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is generated by a small network
+ according to "Activate or Not: Learning Customized Activation" .
+ """
+
+ def __init__(self, c1, k=1, s=1, r=16): # ch_in, kernel, stride, r
+ super().__init__()
+ c2 = max(r, c1 // r)
+ self.p1 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.p2 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.fc1 = nn.Conv2d(c1, c2, k, s, bias=True)
+ self.fc2 = nn.Conv2d(c2, c1, k, s, bias=True)
+ # self.bn1 = nn.BatchNorm2d(c2)
+ # self.bn2 = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ y = x.mean(dim=2, keepdims=True).mean(dim=3, keepdims=True)
+ # batch-size 1 bug/instabilities https://github.com/ultralytics/yolov5/issues/2891
+ # beta = torch.sigmoid(self.bn2(self.fc2(self.bn1(self.fc1(y))))) # bug/unstable
+ beta = torch.sigmoid(self.fc2(self.fc1(y))) # bug patch BN layers removed
+ dpx = (self.p1 - self.p2) * x
+ return dpx * torch.sigmoid(beta * dpx) + self.p2 * x
diff --git a/yolov7_seg/cls/utils/augmentations.py b/yolov7_seg/cls/utils/augmentations.py
new file mode 100644
index 000000000..bced47a5f
--- /dev/null
+++ b/yolov7_seg/cls/utils/augmentations.py
@@ -0,0 +1,347 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Image augmentation functions
+"""
+
+import math
+import random
+
+import cv2
+import numpy as np
+import torchvision.transforms as T
+import torchvision.transforms.functional as TF
+
+from utils.general import LOGGER, check_version, colorstr, resample_segments, segment2box
+from utils.metrics import bbox_ioa
+
+IMAGENET_MEAN = 0.485, 0.456, 0.406 # RGB mean
+IMAGENET_STD = 0.229, 0.224, 0.225 # RGB standard deviation
+
+
+class Albumentations:
+ # YOLOv5 Albumentations class (optional, only used if package is installed)
+ def __init__(self):
+ self.transform = None
+ prefix = colorstr('albumentations: ')
+ try:
+ import albumentations as A
+ check_version(A.__version__, '1.0.3', hard=True) # version requirement
+
+ T = [
+ A.Blur(p=0.01),
+ A.MedianBlur(p=0.01),
+ A.ToGray(p=0.01),
+ A.CLAHE(p=0.01),
+ A.RandomBrightnessContrast(p=0.0),
+ A.RandomGamma(p=0.0),
+ A.ImageCompression(quality_lower=75, p=0.0)] # transforms
+ self.transform = A.Compose(T, bbox_params=A.BboxParams(format='yolo', label_fields=['class_labels']))
+
+ LOGGER.info(prefix + ', '.join(f'{x}'.replace('always_apply=False, ', '') for x in T if x.p))
+ except ImportError: # package not installed, skip
+ pass
+ except Exception as e:
+ LOGGER.info(f'{prefix}{e}')
+
+ def __call__(self, im, labels, p=1.0):
+ if self.transform and random.random() < p:
+ new = self.transform(image=im, bboxes=labels[:, 1:], class_labels=labels[:, 0]) # transformed
+ im, labels = new['image'], np.array([[c, *b] for c, b in zip(new['class_labels'], new['bboxes'])])
+ return im, labels
+
+
+def normalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD):
+ # Denormalize RGB images x per ImageNet stats in BCHW format, i.e. = (x - mean) / std
+ return TF.normalize(x, mean, std, inplace=True)
+
+
+def denormalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD):
+ # Denormalize RGB images x per ImageNet stats in BCHW format, i.e. = x * std + mean
+ for i in range(3):
+ x[:, i] = x[:, i] * std[i] + mean[i]
+ return x
+
+
+def augment_hsv(im, hgain=0.5, sgain=0.5, vgain=0.5):
+ # HSV color-space augmentation
+ if hgain or sgain or vgain:
+ r = np.random.uniform(-1, 1, 3) * [hgain, sgain, vgain] + 1 # random gains
+ hue, sat, val = cv2.split(cv2.cvtColor(im, cv2.COLOR_BGR2HSV))
+ dtype = im.dtype # uint8
+
+ x = np.arange(0, 256, dtype=r.dtype)
+ lut_hue = ((x * r[0]) % 180).astype(dtype)
+ lut_sat = np.clip(x * r[1], 0, 255).astype(dtype)
+ lut_val = np.clip(x * r[2], 0, 255).astype(dtype)
+
+ im_hsv = cv2.merge((cv2.LUT(hue, lut_hue), cv2.LUT(sat, lut_sat), cv2.LUT(val, lut_val)))
+ cv2.cvtColor(im_hsv, cv2.COLOR_HSV2BGR, dst=im) # no return needed
+
+
+def hist_equalize(im, clahe=True, bgr=False):
+ # Equalize histogram on BGR image 'im' with im.shape(n,m,3) and range 0-255
+ yuv = cv2.cvtColor(im, cv2.COLOR_BGR2YUV if bgr else cv2.COLOR_RGB2YUV)
+ if clahe:
+ c = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
+ yuv[:, :, 0] = c.apply(yuv[:, :, 0])
+ else:
+ yuv[:, :, 0] = cv2.equalizeHist(yuv[:, :, 0]) # equalize Y channel histogram
+ return cv2.cvtColor(yuv, cv2.COLOR_YUV2BGR if bgr else cv2.COLOR_YUV2RGB) # convert YUV image to RGB
+
+
+def replicate(im, labels):
+ # Replicate labels
+ h, w = im.shape[:2]
+ boxes = labels[:, 1:].astype(int)
+ x1, y1, x2, y2 = boxes.T
+ s = ((x2 - x1) + (y2 - y1)) / 2 # side length (pixels)
+ for i in s.argsort()[:round(s.size * 0.5)]: # smallest indices
+ x1b, y1b, x2b, y2b = boxes[i]
+ bh, bw = y2b - y1b, x2b - x1b
+ yc, xc = int(random.uniform(0, h - bh)), int(random.uniform(0, w - bw)) # offset x, y
+ x1a, y1a, x2a, y2a = [xc, yc, xc + bw, yc + bh]
+ im[y1a:y2a, x1a:x2a] = im[y1b:y2b, x1b:x2b] # im4[ymin:ymax, xmin:xmax]
+ labels = np.append(labels, [[labels[i, 0], x1a, y1a, x2a, y2a]], axis=0)
+
+ return im, labels
+
+
+def letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
+ # Resize and pad image while meeting stride-multiple constraints
+ shape = im.shape[:2] # current shape [height, width]
+ if isinstance(new_shape, int):
+ new_shape = (new_shape, new_shape)
+
+ # Scale ratio (new / old)
+ r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
+ if not scaleup: # only scale down, do not scale up (for better val mAP)
+ r = min(r, 1.0)
+
+ # Compute padding
+ ratio = r, r # width, height ratios
+ new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
+ dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
+ if auto: # minimum rectangle
+ dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
+ elif scaleFill: # stretch
+ dw, dh = 0.0, 0.0
+ new_unpad = (new_shape[1], new_shape[0])
+ ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
+
+ dw /= 2 # divide padding into 2 sides
+ dh /= 2
+
+ if shape[::-1] != new_unpad: # resize
+ im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
+ top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
+ left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
+ im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
+ return im, ratio, (dw, dh)
+
+
+def random_perspective(im,
+ targets=(),
+ segments=(),
+ degrees=10,
+ translate=.1,
+ scale=.1,
+ shear=10,
+ perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(0.1, 0.1), scale=(0.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = im.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = im.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
+ T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(im[:, :, ::-1]) # base
+ # ax[1].imshow(im2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ if n:
+ use_segments = any(x.any() for x in segments)
+ new = np.zeros((n, 4))
+ if use_segments: # warp segments
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+
+ else: # warp boxes
+ xy = np.ones((n * 4, 3))
+ xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
+
+ # create new boxes
+ x = xy[:, [0, 2, 4, 6]]
+ y = xy[:, [1, 3, 5, 7]]
+ new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
+
+ # clip
+ new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
+ new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+
+ return im, targets
+
+
+def copy_paste(im, labels, segments, p=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ if p and n:
+ h, w, c = im.shape # height, width, channels
+ im_new = np.zeros(im.shape, np.uint8)
+ for j in random.sample(range(n), k=round(p * n)):
+ l, s = labels[j], segments[j]
+ box = w - l[3], l[2], w - l[1], l[4]
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
+ labels = np.concatenate((labels, [[l[0], *box]]), 0)
+ segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=im, src2=im_new)
+ result = cv2.flip(result, 1) # augment segments (flip left-right)
+ i = result > 0 # pixels to replace
+ # i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
+ im[i] = result[i] # cv2.imwrite('debug.jpg', im) # debug
+
+ return im, labels, segments
+
+
+def cutout(im, labels, p=0.5):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ if random.random() < p:
+ h, w = im.shape[:2]
+ scales = [0.5] * 1 + [0.25] * 2 + [0.125] * 4 + [0.0625] * 8 + [0.03125] * 16 # image size fraction
+ for s in scales:
+ mask_h = random.randint(1, int(h * s)) # create random masks
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ # apply random color mask
+ im[ymin:ymax, xmin:xmax] = [random.randint(64, 191) for _ in range(3)]
+
+ # return unobscured labels
+ if len(labels) and s > 0.03:
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ labels = labels[ioa < 0.60] # remove >60% obscured labels
+
+ return labels
+
+
+def mixup(im, labels, im2, labels2):
+ # Applies MixUp augmentation https://arxiv.org/pdf/1710.09412.pdf
+ r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
+ im = (im * r + im2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+ return im, labels
+
+
+def box_candidates(box1, box2, wh_thr=2, ar_thr=100, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
+ # Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
+ w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
+ w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
+ ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
+ return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
+
+
+def classify_albumentations(augment=True,
+ size=224,
+ scale=(0.08, 1.0),
+ hflip=0.5,
+ vflip=0.0,
+ jitter=0.4,
+ mean=IMAGENET_MEAN,
+ std=IMAGENET_STD,
+ auto_aug=False):
+ # YOLOv5 classification Albumentations (optional, only used if package is installed)
+ prefix = colorstr('albumentations: ')
+ try:
+ import albumentations as A
+ from albumentations.pytorch import ToTensorV2
+ check_version(A.__version__, '1.0.3', hard=True) # version requirement
+ if augment: # Resize and crop
+ T = [A.RandomResizedCrop(height=size, width=size, scale=scale)]
+ if auto_aug:
+ # TODO: implement AugMix, AutoAug & RandAug in albumentation
+ LOGGER.info(f'{prefix}auto augmentations are currently not supported')
+ else:
+ if hflip > 0:
+ T += [A.HorizontalFlip(p=hflip)]
+ if vflip > 0:
+ T += [A.VerticalFlip(p=vflip)]
+ if jitter > 0:
+ color_jitter = (float(jitter),) * 3 # repeat value for brightness, contrast, satuaration, 0 hue
+ T += [A.ColorJitter(*color_jitter, 0)]
+ else: # Use fixed crop for eval set (reproducibility)
+ T = [A.SmallestMaxSize(max_size=size), A.CenterCrop(height=size, width=size)]
+ T += [A.Normalize(mean=mean, std=std), ToTensorV2()] # Normalize and convert to Tensor
+ LOGGER.info(prefix + ', '.join(f'{x}'.replace('always_apply=False, ', '') for x in T if x.p))
+ return A.Compose(T)
+
+ except ImportError: # package not installed, skip
+ pass
+ except Exception as e:
+ LOGGER.info(f'{prefix}{e}')
+
+
+def classify_transforms(size=224):
+ # Transforms to apply if albumentations not installed
+ return T.Compose([T.ToTensor(), T.Resize(size), T.CenterCrop(size), T.Normalize(IMAGENET_MEAN, IMAGENET_STD)])
diff --git a/yolov7_seg/cls/utils/autoanchor.py b/yolov7_seg/cls/utils/autoanchor.py
new file mode 100644
index 000000000..c2e82b9e8
--- /dev/null
+++ b/yolov7_seg/cls/utils/autoanchor.py
@@ -0,0 +1,170 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+AutoAnchor utils
+"""
+
+import random
+
+import numpy as np
+import torch
+import yaml
+from tqdm import tqdm
+
+from utils.general import LOGGER, colorstr, emojis
+
+PREFIX = colorstr('AutoAnchor: ')
+
+
+def check_anchor_order(m):
+ # Check anchor order against stride order for YOLOv5 Detect() module m, and correct if necessary
+ a = m.anchors.prod(-1).mean(-1).view(-1) # mean anchor area per output layer
+ da = a[-1] - a[0] # delta a
+ ds = m.stride[-1] - m.stride[0] # delta s
+ if da and (da.sign() != ds.sign()): # same order
+ LOGGER.info(f'{PREFIX}Reversing anchor order')
+ m.anchors[:] = m.anchors.flip(0)
+
+
+def check_anchors(dataset, model, thr=4.0, imgsz=640):
+ # Check anchor fit to data, recompute if necessary
+ m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
+ shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
+ wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
+
+ def metric(k): # compute metric
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1 / r).min(2)[0] # ratio metric
+ best = x.max(1)[0] # best_x
+ aat = (x > 1 / thr).float().sum(1).mean() # anchors above threshold
+ bpr = (best > 1 / thr).float().mean() # best possible recall
+ return bpr, aat
+
+ stride = m.stride.to(m.anchors.device).view(-1, 1, 1) # model strides
+ anchors = m.anchors.clone() * stride # current anchors
+ bpr, aat = metric(anchors.cpu().view(-1, 2))
+ s = f'\n{PREFIX}{aat:.2f} anchors/target, {bpr:.3f} Best Possible Recall (BPR). '
+ if bpr > 0.98: # threshold to recompute
+ LOGGER.info(emojis(f'{s}Current anchors are a good fit to dataset ✅'))
+ else:
+ LOGGER.info(emojis(f'{s}Anchors are a poor fit to dataset ⚠️, attempting to improve...'))
+ na = m.anchors.numel() // 2 # number of anchors
+ try:
+ anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
+ except Exception as e:
+ LOGGER.info(f'{PREFIX}ERROR: {e}')
+ new_bpr = metric(anchors)[0]
+ if new_bpr > bpr: # replace anchors
+ anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
+ m.anchors[:] = anchors.clone().view_as(m.anchors)
+ check_anchor_order(m) # must be in pixel-space (not grid-space)
+ m.anchors /= stride
+ s = f'{PREFIX}Done ✅ (optional: update model *.yaml to use these anchors in the future)'
+ else:
+ s = f'{PREFIX}Done ⚠️ (original anchors better than new anchors, proceeding with original anchors)'
+ LOGGER.info(emojis(s))
+
+
+def kmean_anchors(dataset='./data/coco128.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
+ """ Creates kmeans-evolved anchors from training dataset
+
+ Arguments:
+ dataset: path to data.yaml, or a loaded dataset
+ n: number of anchors
+ img_size: image size used for training
+ thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
+ gen: generations to evolve anchors using genetic algorithm
+ verbose: print all results
+
+ Return:
+ k: kmeans evolved anchors
+
+ Usage:
+ from utils.autoanchor import *; _ = kmean_anchors()
+ """
+ from scipy.cluster.vq import kmeans
+
+ npr = np.random
+ thr = 1 / thr
+
+ def metric(k, wh): # compute metrics
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1 / r).min(2)[0] # ratio metric
+ # x = wh_iou(wh, torch.tensor(k)) # iou metric
+ return x, x.max(1)[0] # x, best_x
+
+ def anchor_fitness(k): # mutation fitness
+ _, best = metric(torch.tensor(k, dtype=torch.float32), wh)
+ return (best * (best > thr).float()).mean() # fitness
+
+ def print_results(k, verbose=True):
+ k = k[np.argsort(k.prod(1))] # sort small to large
+ x, best = metric(k, wh0)
+ bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
+ s = f'{PREFIX}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr\n' \
+ f'{PREFIX}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, ' \
+ f'past_thr={x[x > thr].mean():.3f}-mean: '
+ for x in k:
+ s += '%i,%i, ' % (round(x[0]), round(x[1]))
+ if verbose:
+ LOGGER.info(s[:-2])
+ return k
+
+ if isinstance(dataset, str): # *.yaml file
+ with open(dataset, errors='ignore') as f:
+ data_dict = yaml.safe_load(f) # model dict
+ from utils.dataloaders import LoadImagesAndLabels
+ dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
+
+ # Get label wh
+ shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
+
+ # Filter
+ i = (wh0 < 3.0).any(1).sum()
+ if i:
+ LOGGER.info(f'{PREFIX}WARNING: Extremely small objects found: {i} of {len(wh0)} labels are < 3 pixels in size')
+ wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ # wh = wh * (npr.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
+
+ # Kmeans init
+ try:
+ LOGGER.info(f'{PREFIX}Running kmeans for {n} anchors on {len(wh)} points...')
+ assert n <= len(wh) # apply overdetermined constraint
+ s = wh.std(0) # sigmas for whitening
+ k = kmeans(wh / s, n, iter=30)[0] * s # points
+ assert n == len(k) # kmeans may return fewer points than requested if wh is insufficient or too similar
+ except Exception:
+ LOGGER.warning(f'{PREFIX}WARNING: switching strategies from kmeans to random init')
+ k = np.sort(npr.rand(n * 2)).reshape(n, 2) * img_size # random init
+ wh, wh0 = (torch.tensor(x, dtype=torch.float32) for x in (wh, wh0))
+ k = print_results(k, verbose=False)
+
+ # Plot
+ # k, d = [None] * 20, [None] * 20
+ # for i in tqdm(range(1, 21)):
+ # k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
+ # ax = ax.ravel()
+ # ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
+ # ax[0].hist(wh[wh[:, 0]<100, 0],400)
+ # ax[1].hist(wh[wh[:, 1]<100, 1],400)
+ # fig.savefig('wh.png', dpi=200)
+
+ # Evolve
+ f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
+ pbar = tqdm(range(gen), bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ for _ in pbar:
+ v = np.ones(sh)
+ while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
+ v = ((npr.random(sh) < mp) * random.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
+ kg = (k.copy() * v).clip(min=2.0)
+ fg = anchor_fitness(kg)
+ if fg > f:
+ f, k = fg, kg.copy()
+ pbar.desc = f'{PREFIX}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
+ if verbose:
+ print_results(k, verbose)
+
+ return print_results(k)
diff --git a/yolov7_seg/cls/utils/autobatch.py b/yolov7_seg/cls/utils/autobatch.py
new file mode 100644
index 000000000..e45fd712a
--- /dev/null
+++ b/yolov7_seg/cls/utils/autobatch.py
@@ -0,0 +1,66 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Auto-batch utils
+"""
+
+from copy import deepcopy
+
+import numpy as np
+import torch
+
+from utils.general import LOGGER, colorstr, emojis
+from utils.torch_utils import profile
+
+
+def check_train_batch_size(model, imgsz=640, amp=True):
+ # Check YOLOv5 training batch size
+ with torch.cuda.amp.autocast(amp):
+ return autobatch(deepcopy(model).train(), imgsz) # compute optimal batch size
+
+
+def autobatch(model, imgsz=640, fraction=0.9, batch_size=16):
+ # Automatically estimate best batch size to use `fraction` of available CUDA memory
+ # Usage:
+ # import torch
+ # from utils.autobatch import autobatch
+ # model = torch.hub.load('ultralytics/yolov5', 'yolov5s', autoshape=False)
+ # print(autobatch(model))
+
+ # Check device
+ prefix = colorstr('AutoBatch: ')
+ LOGGER.info(f'{prefix}Computing optimal batch size for --imgsz {imgsz}')
+ device = next(model.parameters()).device # get model device
+ if device.type == 'cpu':
+ LOGGER.info(f'{prefix}CUDA not detected, using default CPU batch-size {batch_size}')
+ return batch_size
+
+ # Inspect CUDA memory
+ gb = 1 << 30 # bytes to GiB (1024 ** 3)
+ d = str(device).upper() # 'CUDA:0'
+ properties = torch.cuda.get_device_properties(device) # device properties
+ t = properties.total_memory / gb # GiB total
+ r = torch.cuda.memory_reserved(device) / gb # GiB reserved
+ a = torch.cuda.memory_allocated(device) / gb # GiB allocated
+ f = t - (r + a) # GiB free
+ LOGGER.info(f'{prefix}{d} ({properties.name}) {t:.2f}G total, {r:.2f}G reserved, {a:.2f}G allocated, {f:.2f}G free')
+
+ # Profile batch sizes
+ batch_sizes = [1, 2, 4, 8, 16]
+ try:
+ img = [torch.zeros(b, 3, imgsz, imgsz) for b in batch_sizes]
+ results = profile(img, model, n=3, device=device)
+ except Exception as e:
+ LOGGER.warning(f'{prefix}{e}')
+
+ # Fit a solution
+ y = [x[2] for x in results if x] # memory [2]
+ p = np.polyfit(batch_sizes[:len(y)], y, deg=1) # first degree polynomial fit
+ b = int((f * fraction - p[1]) / p[0]) # y intercept (optimal batch size)
+ if None in results: # some sizes failed
+ i = results.index(None) # first fail index
+ if b >= batch_sizes[i]: # y intercept above failure point
+ b = batch_sizes[max(i - 1, 0)] # select prior safe point
+
+ fraction = np.polyval(p, b) / t # actual fraction predicted
+ LOGGER.info(emojis(f'{prefix}Using batch-size {b} for {d} {t * fraction:.2f}G/{t:.2f}G ({fraction * 100:.0f}%) ✅'))
+ return b
diff --git a/yolov7_seg/cls/utils/aws/__init__.py b/yolov7_seg/cls/utils/aws/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/yolov7_seg/cls/utils/aws/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/yolov7_seg/cls/utils/aws/mime.sh b/yolov7_seg/cls/utils/aws/mime.sh
new file mode 100644
index 000000000..4a4de18ec
--- /dev/null
+++ b/yolov7_seg/cls/utils/aws/mime.sh
@@ -0,0 +1,26 @@
+# AWS EC2 instance startup 'MIME' script https://aws.amazon.com/premiumsupport/knowledge-center/execute-user-data-ec2/
+# This script will run on every instance restart, not only on first start
+# --- DO NOT COPY ABOVE COMMENTS WHEN PASTING INTO USERDATA ---
+
+Content-Type: multipart/mixed; boundary="//"
+MIME-Version: 1.0
+
+--//
+Content-Type: text/cloud-config; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="cloud-config.txt"
+
+#cloud-config
+cloud_final_modules:
+- [scripts-user, always]
+
+--//
+Content-Type: text/x-shellscript; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="userdata.txt"
+
+#!/bin/bash
+# --- paste contents of userdata.sh here ---
+--//
diff --git a/yolov7_seg/cls/utils/aws/resume.py b/yolov7_seg/cls/utils/aws/resume.py
new file mode 100644
index 000000000..2e7b2d814
--- /dev/null
+++ b/yolov7_seg/cls/utils/aws/resume.py
@@ -0,0 +1,40 @@
+# Resume all interrupted trainings in yolov5/ dir including DDP trainings
+# Usage: $ python utils/aws/resume.py
+
+import os
+import sys
+from pathlib import Path
+
+import torch
+import yaml
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[2] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+port = 0 # --master_port
+path = Path('').resolve()
+for last in path.rglob('*/**/last.pt'):
+ ckpt = torch.load(last)
+ if ckpt['optimizer'] is None:
+ continue
+
+ # Load opt.yaml
+ with open(last.parent.parent / 'opt.yaml', errors='ignore') as f:
+ opt = yaml.safe_load(f)
+
+ # Get device count
+ d = opt['device'].split(',') # devices
+ nd = len(d) # number of devices
+ ddp = nd > 1 or (nd == 0 and torch.cuda.device_count() > 1) # distributed data parallel
+
+ if ddp: # multi-GPU
+ port += 1
+ cmd = f'python -m torch.distributed.run --nproc_per_node {nd} --master_port {port} train.py --resume {last}'
+ else: # single-GPU
+ cmd = f'python train.py --resume {last}'
+
+ cmd += ' > /dev/null 2>&1 &' # redirect output to dev/null and run in daemon thread
+ print(cmd)
+ os.system(cmd)
diff --git a/yolov7_seg/cls/utils/aws/userdata.sh b/yolov7_seg/cls/utils/aws/userdata.sh
new file mode 100644
index 000000000..53527ab84
--- /dev/null
+++ b/yolov7_seg/cls/utils/aws/userdata.sh
@@ -0,0 +1,27 @@
+#!/bin/bash
+# AWS EC2 instance startup script https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/user-data.html
+# This script will run only once on first instance start (for a re-start script see mime.sh)
+# /home/ubuntu (ubuntu) or /home/ec2-user (amazon-linux) is working dir
+# Use >300 GB SSD
+
+cd home/ubuntu
+if [ ! -d yolov5 ]; then
+ echo "Running first-time script." # install dependencies, download COCO, pull Docker
+ git clone https://github.com/ultralytics/yolov5 -b master && sudo chmod -R 777 yolov5
+ cd yolov5
+ bash data/scripts/get_coco.sh && echo "COCO done." &
+ sudo docker pull ultralytics/yolov5:latest && echo "Docker done." &
+ python -m pip install --upgrade pip && pip install -r requirements.txt && python detect.py && echo "Requirements done." &
+ wait && echo "All tasks done." # finish background tasks
+else
+ echo "Running re-start script." # resume interrupted runs
+ i=0
+ list=$(sudo docker ps -qa) # container list i.e. $'one\ntwo\nthree\nfour'
+ while IFS= read -r id; do
+ ((i++))
+ echo "restarting container $i: $id"
+ sudo docker start $id
+ # sudo docker exec -it $id python train.py --resume # single-GPU
+ sudo docker exec -d $id python utils/aws/resume.py # multi-scenario
+ done <<<"$list"
+fi
diff --git a/yolov7_seg/cls/utils/benchmarks.py b/yolov7_seg/cls/utils/benchmarks.py
new file mode 100644
index 000000000..bbb316783
--- /dev/null
+++ b/yolov7_seg/cls/utils/benchmarks.py
@@ -0,0 +1,157 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run YOLOv5 benchmarks on all supported export formats
+
+Format | `export.py --include` | Model
+--- | --- | ---
+PyTorch | - | yolov5s.pt
+TorchScript | `torchscript` | yolov5s.torchscript
+ONNX | `onnx` | yolov5s.onnx
+OpenVINO | `openvino` | yolov5s_openvino_model/
+TensorRT | `engine` | yolov5s.engine
+CoreML | `coreml` | yolov5s.mlmodel
+TensorFlow SavedModel | `saved_model` | yolov5s_saved_model/
+TensorFlow GraphDef | `pb` | yolov5s.pb
+TensorFlow Lite | `tflite` | yolov5s.tflite
+TensorFlow Edge TPU | `edgetpu` | yolov5s_edgetpu.tflite
+TensorFlow.js | `tfjs` | yolov5s_web_model/
+
+Requirements:
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu # CPU
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime-gpu openvino-dev tensorflow # GPU
+ $ pip install -U nvidia-tensorrt --index-url https://pypi.ngc.nvidia.com # TensorRT
+
+Usage:
+ $ python utils/benchmarks.py --weights yolov5s.pt --img 640
+"""
+
+import argparse
+import platform
+import sys
+import time
+from pathlib import Path
+
+import pandas as pd
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+# ROOT = ROOT.relative_to(Path.cwd()) # relative
+
+import export
+import val
+from utils import notebook_init
+from utils.general import LOGGER, check_yaml, file_size, print_args
+from utils.torch_utils import select_device
+
+
+def run(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=640, # inference size (pixels)
+ batch_size=1, # batch size
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ half=False, # use FP16 half-precision inference
+ test=False, # test exports only
+ pt_only=False, # test PyTorch only
+ hard_fail=False, # throw error on benchmark failure
+):
+ y, t = [], time.time()
+ device = select_device(device)
+ for i, (name, f, suffix, cpu, gpu) in export.export_formats().iterrows(): # index, (name, file, suffix, CPU, GPU)
+ try:
+ assert i not in (9, 10), 'inference not supported' # Edge TPU and TF.js are unsupported
+ assert i != 5 or platform.system() == 'Darwin', 'inference only supported on macOS>=10.13' # CoreML
+ if 'cpu' in device.type:
+ assert cpu, 'inference not supported on CPU'
+ if 'cuda' in device.type:
+ assert gpu, 'inference not supported on GPU'
+
+ # Export
+ if f == '-':
+ w = weights # PyTorch format
+ else:
+ w = export.run(weights=weights, imgsz=[imgsz], include=[f], device=device, half=half)[-1] # all others
+ assert suffix in str(w), 'export failed'
+
+ # Validate
+ result = val.run(data, w, batch_size, imgsz, plots=False, device=device, task='benchmark', half=half)
+ metrics = result[0] # metrics (mp, mr, map50, map, *losses(box, obj, cls))
+ speeds = result[2] # times (preprocess, inference, postprocess)
+ y.append([name, round(file_size(w), 1), round(metrics[3], 4), round(speeds[1], 2)]) # MB, mAP, t_inference
+ except Exception as e:
+ if hard_fail:
+ assert type(e) is AssertionError, f'Benchmark --hard-fail for {name}: {e}'
+ LOGGER.warning(f'WARNING: Benchmark failure for {name}: {e}')
+ y.append([name, None, None, None]) # mAP, t_inference
+ if pt_only and i == 0:
+ break # break after PyTorch
+
+ # Print results
+ LOGGER.info('\n')
+ parse_opt()
+ notebook_init() # print system info
+ c = ['Format', 'Size (MB)', 'mAP@0.5:0.95', 'Inference time (ms)'] if map else ['Format', 'Export', '', '']
+ py = pd.DataFrame(y, columns=c)
+ LOGGER.info(f'\nBenchmarks complete ({time.time() - t:.2f}s)')
+ LOGGER.info(str(py if map else py.iloc[:, :2]))
+ return py
+
+
+def test(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=640, # inference size (pixels)
+ batch_size=1, # batch size
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ half=False, # use FP16 half-precision inference
+ test=False, # test exports only
+ pt_only=False, # test PyTorch only
+ hard_fail=False, # throw error on benchmark failure
+):
+ y, t = [], time.time()
+ device = select_device(device)
+ for i, (name, f, suffix, gpu) in export.export_formats().iterrows(): # index, (name, file, suffix, gpu-capable)
+ try:
+ w = weights if f == '-' else \
+ export.run(weights=weights, imgsz=[imgsz], include=[f], device=device, half=half)[-1] # weights
+ assert suffix in str(w), 'export failed'
+ y.append([name, True])
+ except Exception:
+ y.append([name, False]) # mAP, t_inference
+
+ # Print results
+ LOGGER.info('\n')
+ parse_opt()
+ notebook_init() # print system info
+ py = pd.DataFrame(y, columns=['Format', 'Export'])
+ LOGGER.info(f'\nExports complete ({time.time() - t:.2f}s)')
+ LOGGER.info(str(py))
+ return py
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='weights path')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--test', action='store_true', help='test exports only')
+ parser.add_argument('--pt-only', action='store_true', help='test PyTorch only')
+ parser.add_argument('--hard-fail', action='store_true', help='throw error on benchmark failure')
+ opt = parser.parse_args()
+ opt.data = check_yaml(opt.data) # check YAML
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ test(**vars(opt)) if opt.test else run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/cls/utils/callbacks.py b/yolov7_seg/cls/utils/callbacks.py
new file mode 100644
index 000000000..da36a557a
--- /dev/null
+++ b/yolov7_seg/cls/utils/callbacks.py
@@ -0,0 +1,71 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Callback utils
+"""
+
+
+class Callbacks:
+ """"
+ Handles all registered callbacks for YOLOv5 Hooks
+ """
+
+ def __init__(self):
+ # Define the available callbacks
+ self._callbacks = {
+ 'on_pretrain_routine_start': [],
+ 'on_pretrain_routine_end': [],
+ 'on_train_start': [],
+ 'on_train_epoch_start': [],
+ 'on_train_batch_start': [],
+ 'optimizer_step': [],
+ 'on_before_zero_grad': [],
+ 'on_train_batch_end': [],
+ 'on_train_epoch_end': [],
+ 'on_val_start': [],
+ 'on_val_batch_start': [],
+ 'on_val_image_end': [],
+ 'on_val_batch_end': [],
+ 'on_val_end': [],
+ 'on_fit_epoch_end': [], # fit = train + val
+ 'on_model_save': [],
+ 'on_train_end': [],
+ 'on_params_update': [],
+ 'teardown': [],}
+ self.stop_training = False # set True to interrupt training
+
+ def register_action(self, hook, name='', callback=None):
+ """
+ Register a new action to a callback hook
+
+ Args:
+ hook: The callback hook name to register the action to
+ name: The name of the action for later reference
+ callback: The callback to fire
+ """
+ assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
+ assert callable(callback), f"callback '{callback}' is not callable"
+ self._callbacks[hook].append({'name': name, 'callback': callback})
+
+ def get_registered_actions(self, hook=None):
+ """"
+ Returns all the registered actions by callback hook
+
+ Args:
+ hook: The name of the hook to check, defaults to all
+ """
+ return self._callbacks[hook] if hook else self._callbacks
+
+ def run(self, hook, *args, **kwargs):
+ """
+ Loop through the registered actions and fire all callbacks
+
+ Args:
+ hook: The name of the hook to check, defaults to all
+ args: Arguments to receive from YOLOv5
+ kwargs: Keyword Arguments to receive from YOLOv5
+ """
+
+ assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
+
+ for logger in self._callbacks[hook]:
+ logger['callback'](*args, **kwargs)
diff --git a/yolov7_seg/cls/utils/dataloaders.py b/yolov7_seg/cls/utils/dataloaders.py
new file mode 100644
index 000000000..866f490fa
--- /dev/null
+++ b/yolov7_seg/cls/utils/dataloaders.py
@@ -0,0 +1,1157 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Dataloaders and dataset utils
+"""
+
+import contextlib
+import glob
+import hashlib
+import json
+import math
+import os
+import random
+import shutil
+import time
+from itertools import repeat
+from multiprocessing.pool import Pool, ThreadPool
+from pathlib import Path
+from threading import Thread
+from urllib.parse import urlparse
+from zipfile import ZipFile
+
+import numpy as np
+import torch
+import torch.nn.functional as F
+import torchvision
+import yaml
+from PIL import ExifTags, Image, ImageOps
+from torch.utils.data import DataLoader, Dataset, dataloader, distributed
+from tqdm import tqdm
+
+from utils.augmentations import (Albumentations, augment_hsv, classify_albumentations, classify_transforms, copy_paste,
+ letterbox, mixup, random_perspective)
+from utils.general import (DATASETS_DIR, LOGGER, NUM_THREADS, check_dataset, check_requirements, check_yaml, clean_str,
+ cv2, is_colab, is_kaggle, segments2boxes, xyn2xy, xywh2xyxy, xywhn2xyxy, xyxy2xywhn)
+from utils.torch_utils import torch_distributed_zero_first
+
+# Parameters
+HELP_URL = 'https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
+IMG_FORMATS = 'bmp', 'dng', 'jpeg', 'jpg', 'mpo', 'png', 'tif', 'tiff', 'webp' # include image suffixes
+VID_FORMATS = 'asf', 'avi', 'gif', 'm4v', 'mkv', 'mov', 'mp4', 'mpeg', 'mpg', 'ts', 'wmv' # include video suffixes
+BAR_FORMAT = '{l_bar}{bar:10}{r_bar}{bar:-10b}' # tqdm bar format
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+
+# Get orientation exif tag
+for orientation in ExifTags.TAGS.keys():
+ if ExifTags.TAGS[orientation] == 'Orientation':
+ break
+
+
+def get_hash(paths):
+ # Returns a single hash value of a list of paths (files or dirs)
+ size = sum(os.path.getsize(p) for p in paths if os.path.exists(p)) # sizes
+ h = hashlib.md5(str(size).encode()) # hash sizes
+ h.update(''.join(paths).encode()) # hash paths
+ return h.hexdigest() # return hash
+
+
+def exif_size(img):
+ # Returns exif-corrected PIL size
+ s = img.size # (width, height)
+ with contextlib.suppress(Exception):
+ rotation = dict(img._getexif().items())[orientation]
+ if rotation in [6, 8]: # rotation 270 or 90
+ s = (s[1], s[0])
+ return s
+
+
+def exif_transpose(image):
+ """
+ Transpose a PIL image accordingly if it has an EXIF Orientation tag.
+ Inplace version of https://github.com/python-pillow/Pillow/blob/master/src/PIL/ImageOps.py exif_transpose()
+
+ :param image: The image to transpose.
+ :return: An image.
+ """
+ exif = image.getexif()
+ orientation = exif.get(0x0112, 1) # default 1
+ if orientation > 1:
+ method = {
+ 2: Image.FLIP_LEFT_RIGHT,
+ 3: Image.ROTATE_180,
+ 4: Image.FLIP_TOP_BOTTOM,
+ 5: Image.TRANSPOSE,
+ 6: Image.ROTATE_270,
+ 7: Image.TRANSVERSE,
+ 8: Image.ROTATE_90,}.get(orientation)
+ if method is not None:
+ image = image.transpose(method)
+ del exif[0x0112]
+ image.info["exif"] = exif.tobytes()
+ return image
+
+
+def seed_worker(worker_id):
+ # Set dataloader worker seed https://pytorch.org/docs/stable/notes/randomness.html#dataloader
+ worker_seed = torch.initial_seed() % 2 ** 32
+ np.random.seed(worker_seed)
+ random.seed(worker_seed)
+
+
+def create_dataloader(path,
+ imgsz,
+ batch_size,
+ stride,
+ single_cls=False,
+ hyp=None,
+ augment=False,
+ cache=False,
+ pad=0.0,
+ rect=False,
+ rank=-1,
+ workers=8,
+ image_weights=False,
+ quad=False,
+ prefix='',
+ shuffle=False):
+ if rect and shuffle:
+ LOGGER.warning('WARNING: --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ shuffle = False
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = LoadImagesAndLabels(
+ path,
+ imgsz,
+ batch_size,
+ augment=augment, # augmentation
+ hyp=hyp, # hyperparameters
+ rect=rect, # rectangular batches
+ cache_images=cache,
+ single_cls=single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix)
+
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count() # number of CUDA devices
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
+ generator = torch.Generator()
+ generator.manual_seed(0)
+ return loader(dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn,
+ worker_init_fn=seed_worker,
+ generator=generator), dataset
+
+
+class InfiniteDataLoader(dataloader.DataLoader):
+ """ Dataloader that reuses workers
+
+ Uses same syntax as vanilla DataLoader
+ """
+
+ def __init__(self, *args, **kwargs):
+ super().__init__(*args, **kwargs)
+ object.__setattr__(self, 'batch_sampler', _RepeatSampler(self.batch_sampler))
+ self.iterator = super().__iter__()
+
+ def __len__(self):
+ return len(self.batch_sampler.sampler)
+
+ def __iter__(self):
+ for _ in range(len(self)):
+ yield next(self.iterator)
+
+
+class _RepeatSampler:
+ """ Sampler that repeats forever
+
+ Args:
+ sampler (Sampler)
+ """
+
+ def __init__(self, sampler):
+ self.sampler = sampler
+
+ def __iter__(self):
+ while True:
+ yield from iter(self.sampler)
+
+
+class LoadImages:
+ # YOLOv5 image/video dataloader, i.e. `python detect.py --source image.jpg/vid.mp4`
+ def __init__(self, path, img_size=640, stride=32, auto=True):
+ files = []
+ for p in sorted(path) if isinstance(path, (list, tuple)) else [path]:
+ p = str(Path(p).resolve())
+ if '*' in p:
+ files.extend(sorted(glob.glob(p, recursive=True))) # glob
+ elif os.path.isdir(p):
+ files.extend(sorted(glob.glob(os.path.join(p, '*.*')))) # dir
+ elif os.path.isfile(p):
+ files.append(p) # files
+ else:
+ raise FileNotFoundError(f'{p} does not exist')
+
+ images = [x for x in files if x.split('.')[-1].lower() in IMG_FORMATS]
+ videos = [x for x in files if x.split('.')[-1].lower() in VID_FORMATS]
+ ni, nv = len(images), len(videos)
+
+ self.img_size = img_size
+ self.stride = stride
+ self.files = images + videos
+ self.nf = ni + nv # number of files
+ self.video_flag = [False] * ni + [True] * nv
+ self.mode = 'image'
+ self.auto = auto
+ if any(videos):
+ self.new_video(videos[0]) # new video
+ else:
+ self.cap = None
+ assert self.nf > 0, f'No images or videos found in {p}. ' \
+ f'Supported formats are:\nimages: {IMG_FORMATS}\nvideos: {VID_FORMATS}'
+
+ def __iter__(self):
+ self.count = 0
+ return self
+
+ def __next__(self):
+ if self.count == self.nf:
+ raise StopIteration
+ path = self.files[self.count]
+
+ if self.video_flag[self.count]:
+ # Read video
+ self.mode = 'video'
+ ret_val, img0 = self.cap.read()
+ while not ret_val:
+ self.count += 1
+ self.cap.release()
+ if self.count == self.nf: # last video
+ raise StopIteration
+ path = self.files[self.count]
+ self.new_video(path)
+ ret_val, img0 = self.cap.read()
+
+ self.frame += 1
+ s = f'video {self.count + 1}/{self.nf} ({self.frame}/{self.frames}) {path}: '
+
+ else:
+ # Read image
+ self.count += 1
+ img0 = cv2.imread(path) # BGR
+ assert img0 is not None, f'Image Not Found {path}'
+ s = f'image {self.count}/{self.nf} {path}: '
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride, auto=self.auto)[0]
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return path, img, img0, self.cap, s
+
+ def new_video(self, path):
+ self.frame = 0
+ self.cap = cv2.VideoCapture(path)
+ self.frames = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
+
+ def __len__(self):
+ return self.nf # number of files
+
+
+class LoadWebcam: # for inference
+ # YOLOv5 local webcam dataloader, i.e. `python detect.py --source 0`
+ def __init__(self, pipe='0', img_size=640, stride=32):
+ self.img_size = img_size
+ self.stride = stride
+ self.pipe = eval(pipe) if pipe.isnumeric() else pipe
+ self.cap = cv2.VideoCapture(self.pipe) # video capture object
+ self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ self.cap.release()
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Read frame
+ ret_val, img0 = self.cap.read()
+ img0 = cv2.flip(img0, 1) # flip left-right
+
+ # Print
+ assert ret_val, f'Camera Error {self.pipe}'
+ img_path = 'webcam.jpg'
+ s = f'webcam {self.count}: '
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return img_path, img, img0, None, s
+
+ def __len__(self):
+ return 0
+
+
+class LoadStreams:
+ # YOLOv5 streamloader, i.e. `python detect.py --source 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP streams`
+ def __init__(self, sources='streams.txt', img_size=640, stride=32, auto=True):
+ self.mode = 'stream'
+ self.img_size = img_size
+ self.stride = stride
+
+ if os.path.isfile(sources):
+ with open(sources) as f:
+ sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
+ else:
+ sources = [sources]
+
+ n = len(sources)
+ self.imgs, self.fps, self.frames, self.threads = [None] * n, [0] * n, [0] * n, [None] * n
+ self.sources = [clean_str(x) for x in sources] # clean source names for later
+ self.auto = auto
+ for i, s in enumerate(sources): # index, source
+ # Start thread to read frames from video stream
+ st = f'{i + 1}/{n}: {s}... '
+ if urlparse(s).hostname in ('www.youtube.com', 'youtube.com', 'youtu.be'): # if source is YouTube video
+ check_requirements(('pafy', 'youtube_dl==2020.12.2'))
+ import pafy
+ s = pafy.new(s).getbest(preftype="mp4").url # YouTube URL
+ s = eval(s) if s.isnumeric() else s # i.e. s = '0' local webcam
+ if s == 0:
+ assert not is_colab(), '--source 0 webcam unsupported on Colab. Rerun command in a local environment.'
+ assert not is_kaggle(), '--source 0 webcam unsupported on Kaggle. Rerun command in a local environment.'
+ cap = cv2.VideoCapture(s)
+ assert cap.isOpened(), f'{st}Failed to open {s}'
+ w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ fps = cap.get(cv2.CAP_PROP_FPS) # warning: may return 0 or nan
+ self.frames[i] = max(int(cap.get(cv2.CAP_PROP_FRAME_COUNT)), 0) or float('inf') # infinite stream fallback
+ self.fps[i] = max((fps if math.isfinite(fps) else 0) % 100, 0) or 30 # 30 FPS fallback
+
+ _, self.imgs[i] = cap.read() # guarantee first frame
+ self.threads[i] = Thread(target=self.update, args=([i, cap, s]), daemon=True)
+ LOGGER.info(f"{st} Success ({self.frames[i]} frames {w}x{h} at {self.fps[i]:.2f} FPS)")
+ self.threads[i].start()
+ LOGGER.info('') # newline
+
+ # check for common shapes
+ s = np.stack([letterbox(x, self.img_size, stride=self.stride, auto=self.auto)[0].shape for x in self.imgs])
+ self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
+ if not self.rect:
+ LOGGER.warning('WARNING: Stream shapes differ. For optimal performance supply similarly-shaped streams.')
+
+ def update(self, i, cap, stream):
+ # Read stream `i` frames in daemon thread
+ n, f, read = 0, self.frames[i], 1 # frame number, frame array, inference every 'read' frame
+ while cap.isOpened() and n < f:
+ n += 1
+ # _, self.imgs[index] = cap.read()
+ cap.grab()
+ if n % read == 0:
+ success, im = cap.retrieve()
+ if success:
+ self.imgs[i] = im
+ else:
+ LOGGER.warning('WARNING: Video stream unresponsive, please check your IP camera connection.')
+ self.imgs[i] = np.zeros_like(self.imgs[i])
+ cap.open(stream) # re-open stream if signal was lost
+ time.sleep(0.0) # wait time
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if not all(x.is_alive() for x in self.threads) or cv2.waitKey(1) == ord('q'): # q to quit
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Letterbox
+ img0 = self.imgs.copy()
+ img = [letterbox(x, self.img_size, stride=self.stride, auto=self.rect and self.auto)[0] for x in img0]
+
+ # Stack
+ img = np.stack(img, 0)
+
+ # Convert
+ img = img[..., ::-1].transpose((0, 3, 1, 2)) # BGR to RGB, BHWC to BCHW
+ img = np.ascontiguousarray(img)
+
+ return self.sources, img, img0, None, ''
+
+ def __len__(self):
+ return len(self.sources) # 1E12 frames = 32 streams at 30 FPS for 30 years
+
+
+def img2label_paths(img_paths):
+ # Define label paths as a function of image paths
+ sa, sb = f'{os.sep}images{os.sep}', f'{os.sep}labels{os.sep}' # /images/, /labels/ substrings
+ return [sb.join(x.rsplit(sa, 1)).rsplit('.', 1)[0] + '.txt' for x in img_paths]
+
+
+class LoadImagesAndLabels(Dataset):
+ # YOLOv5 train_loader/val_loader, loads images and labels for training and validation
+ cache_version = 0.6 # dataset labels *.cache version
+ rand_interp_methods = [cv2.INTER_NEAREST, cv2.INTER_LINEAR, cv2.INTER_CUBIC, cv2.INTER_AREA, cv2.INTER_LANCZOS4]
+
+ def __init__(self,
+ path,
+ img_size=640,
+ batch_size=16,
+ augment=False,
+ hyp=None,
+ rect=False,
+ image_weights=False,
+ cache_images=False,
+ single_cls=False,
+ stride=32,
+ pad=0.0,
+ prefix=''):
+ self.img_size = img_size
+ self.augment = augment
+ self.hyp = hyp
+ self.image_weights = image_weights
+ self.rect = False if image_weights else rect
+ self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
+ self.mosaic_border = [-img_size // 2, -img_size // 2]
+ self.stride = stride
+ self.path = path
+ self.albumentations = Albumentations() if augment else None
+
+ try:
+ f = [] # image files
+ for p in path if isinstance(path, list) else [path]:
+ p = Path(p) # os-agnostic
+ if p.is_dir(): # dir
+ f += glob.glob(str(p / '**' / '*.*'), recursive=True)
+ # f = list(p.rglob('*.*')) # pathlib
+ elif p.is_file(): # file
+ with open(p) as t:
+ t = t.read().strip().splitlines()
+ parent = str(p.parent) + os.sep
+ f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
+ # f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
+ else:
+ raise FileNotFoundError(f'{prefix}{p} does not exist')
+ self.im_files = sorted(x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in IMG_FORMATS)
+ # self.img_files = sorted([x for x in f if x.suffix[1:].lower() in IMG_FORMATS]) # pathlib
+ assert self.im_files, f'{prefix}No images found'
+ except Exception as e:
+ raise Exception(f'{prefix}Error loading data from {path}: {e}\nSee {HELP_URL}')
+
+ # Check cache
+ self.label_files = img2label_paths(self.im_files) # labels
+ cache_path = (p if p.is_file() else Path(self.label_files[0]).parent).with_suffix('.cache')
+ try:
+ cache, exists = np.load(cache_path, allow_pickle=True).item(), True # load dict
+ assert cache['version'] == self.cache_version # matches current version
+ assert cache['hash'] == get_hash(self.label_files + self.im_files) # identical hash
+ except Exception:
+ cache, exists = self.cache_labels(cache_path, prefix), False # run cache ops
+
+ # Display cache
+ nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupt, total
+ if exists and LOCAL_RANK in {-1, 0}:
+ d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupt"
+ tqdm(None, desc=prefix + d, total=n, initial=n, bar_format=BAR_FORMAT) # display cache results
+ if cache['msgs']:
+ LOGGER.info('\n'.join(cache['msgs'])) # display warnings
+ assert nf > 0 or not augment, f'{prefix}No labels in {cache_path}. Can not train without labels. See {HELP_URL}'
+
+ # Read cache
+ [cache.pop(k) for k in ('hash', 'version', 'msgs')] # remove items
+ labels, shapes, self.segments = zip(*cache.values())
+ self.labels = list(labels)
+ self.shapes = np.array(shapes)
+ self.im_files = list(cache.keys()) # update
+ self.label_files = img2label_paths(cache.keys()) # update
+ n = len(shapes) # number of images
+ bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
+ nb = bi[-1] + 1 # number of batches
+ self.batch = bi # batch index of image
+ self.n = n
+ self.indices = range(n)
+
+ # Update labels
+ include_class = [] # filter labels to include only these classes (optional)
+ include_class_array = np.array(include_class).reshape(1, -1)
+ for i, (label, segment) in enumerate(zip(self.labels, self.segments)):
+ if include_class:
+ j = (label[:, 0:1] == include_class_array).any(1)
+ self.labels[i] = label[j]
+ if segment:
+ self.segments[i] = segment[j]
+ if single_cls: # single-class training, merge all classes into 0
+ self.labels[i][:, 0] = 0
+ if segment:
+ self.segments[i][:, 0] = 0
+
+ # Rectangular Training
+ if self.rect:
+ # Sort by aspect ratio
+ s = self.shapes # wh
+ ar = s[:, 1] / s[:, 0] # aspect ratio
+ irect = ar.argsort()
+ self.im_files = [self.im_files[i] for i in irect]
+ self.label_files = [self.label_files[i] for i in irect]
+ self.labels = [self.labels[i] for i in irect]
+ self.shapes = s[irect] # wh
+ ar = ar[irect]
+
+ # Set training image shapes
+ shapes = [[1, 1]] * nb
+ for i in range(nb):
+ ari = ar[bi == i]
+ mini, maxi = ari.min(), ari.max()
+ if maxi < 1:
+ shapes[i] = [maxi, 1]
+ elif mini > 1:
+ shapes[i] = [1, 1 / mini]
+
+ self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(np.int) * stride
+
+ # Cache images into RAM/disk for faster training (WARNING: large datasets may exceed system resources)
+ self.ims = [None] * n
+ self.npy_files = [Path(f).with_suffix('.npy') for f in self.im_files]
+ if cache_images:
+ gb = 0 # Gigabytes of cached images
+ self.im_hw0, self.im_hw = [None] * n, [None] * n
+ fcn = self.cache_images_to_disk if cache_images == 'disk' else self.load_image
+ results = ThreadPool(NUM_THREADS).imap(fcn, range(n))
+ pbar = tqdm(enumerate(results), total=n, bar_format=BAR_FORMAT, disable=LOCAL_RANK > 0)
+ for i, x in pbar:
+ if cache_images == 'disk':
+ gb += self.npy_files[i].stat().st_size
+ else: # 'ram'
+ self.ims[i], self.im_hw0[i], self.im_hw[i] = x # im, hw_orig, hw_resized = load_image(self, i)
+ gb += self.ims[i].nbytes
+ pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB {cache_images})'
+ pbar.close()
+
+ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
+ # Cache dataset labels, check images and read shapes
+ x = {} # dict
+ nm, nf, ne, nc, msgs = 0, 0, 0, 0, [] # number missing, found, empty, corrupt, messages
+ desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels..."
+ with Pool(NUM_THREADS) as pool:
+ pbar = tqdm(pool.imap(verify_image_label, zip(self.im_files, self.label_files, repeat(prefix))),
+ desc=desc,
+ total=len(self.im_files),
+ bar_format=BAR_FORMAT)
+ for im_file, lb, shape, segments, nm_f, nf_f, ne_f, nc_f, msg in pbar:
+ nm += nm_f
+ nf += nf_f
+ ne += ne_f
+ nc += nc_f
+ if im_file:
+ x[im_file] = [lb, shape, segments]
+ if msg:
+ msgs.append(msg)
+ pbar.desc = f"{desc}{nf} found, {nm} missing, {ne} empty, {nc} corrupt"
+
+ pbar.close()
+ if msgs:
+ LOGGER.info('\n'.join(msgs))
+ if nf == 0:
+ LOGGER.warning(f'{prefix}WARNING: No labels found in {path}. See {HELP_URL}')
+ x['hash'] = get_hash(self.label_files + self.im_files)
+ x['results'] = nf, nm, ne, nc, len(self.im_files)
+ x['msgs'] = msgs # warnings
+ x['version'] = self.cache_version # cache version
+ try:
+ np.save(path, x) # save cache for next time
+ path.with_suffix('.cache.npy').rename(path) # remove .npy suffix
+ LOGGER.info(f'{prefix}New cache created: {path}')
+ except Exception as e:
+ LOGGER.warning(f'{prefix}WARNING: Cache directory {path.parent} is not writeable: {e}') # not writeable
+ return x
+
+ def __len__(self):
+ return len(self.im_files)
+
+ # def __iter__(self):
+ # self.count = -1
+ # print('ran dataset iter')
+ # #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
+ # return self
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ if mosaic:
+ # Load mosaic
+ img, labels = self.load_mosaic(index)
+ shapes = None
+
+ # MixUp augmentation
+ if random.random() < hyp['mixup']:
+ img, labels = mixup(img, labels, *self.load_mosaic(random.randint(0, self.n - 1)))
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = self.load_image(index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ img, labels = random_perspective(img,
+ labels,
+ degrees=hyp['degrees'],
+ translate=hyp['translate'],
+ scale=hyp['scale'],
+ shear=hyp['shear'],
+ perspective=hyp['perspective'])
+
+ nl = len(labels) # number of labels
+ if nl:
+ labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1E-3)
+
+ if self.augment:
+ # Albumentations
+ img, labels = self.albumentations(img, labels)
+ nl = len(labels) # update after albumentations
+
+ # HSV color-space
+ augment_hsv(img, hgain=hyp['hsv_h'], sgain=hyp['hsv_s'], vgain=hyp['hsv_v'])
+
+ # Flip up-down
+ if random.random() < hyp['flipud']:
+ img = np.flipud(img)
+ if nl:
+ labels[:, 2] = 1 - labels[:, 2]
+
+ # Flip left-right
+ if random.random() < hyp['fliplr']:
+ img = np.fliplr(img)
+ if nl:
+ labels[:, 1] = 1 - labels[:, 1]
+
+ # Cutouts
+ # labels = cutout(img, labels, p=0.5)
+ # nl = len(labels) # update after cutout
+
+ labels_out = torch.zeros((nl, 6))
+ if nl:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return torch.from_numpy(img), labels_out, self.im_files[index], shapes
+
+ def load_image(self, i):
+ # Loads 1 image from dataset index 'i', returns (im, original hw, resized hw)
+ im, f, fn = self.ims[i], self.im_files[i], self.npy_files[i],
+ if im is None: # not cached in RAM
+ if fn.exists(): # load npy
+ im = np.load(fn)
+ else: # read image
+ im = cv2.imread(f) # BGR
+ assert im is not None, f'Image Not Found {f}'
+ h0, w0 = im.shape[:2] # orig hw
+ r = self.img_size / max(h0, w0) # ratio
+ if r != 1: # if sizes are not equal
+ interp = cv2.INTER_LINEAR if (self.augment or r > 1) else cv2.INTER_AREA
+ im = cv2.resize(im, (int(w0 * r), int(h0 * r)), interpolation=interp)
+ return im, (h0, w0), im.shape[:2] # im, hw_original, hw_resized
+ return self.ims[i], self.im_hw0[i], self.im_hw[i] # im, hw_original, hw_resized
+
+ def cache_images_to_disk(self, i):
+ # Saves an image as an *.npy file for faster loading
+ f = self.npy_files[i]
+ if not f.exists():
+ np.save(f.as_posix(), cv2.imread(self.im_files[i]))
+
+ def load_mosaic(self, index):
+ # YOLOv5 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ random.shuffle(indices)
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp['copy_paste'])
+ img4, labels4 = random_perspective(img4,
+ labels4,
+ segments4,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img4, labels4
+
+ def load_mosaic9(self, index):
+ # YOLOv5 9-mosaic loader. Loads 1 image + 8 random images into a 9-image mosaic
+ labels9, segments9 = [], []
+ s = self.img_size
+ indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
+ random.shuffle(indices)
+ hp, wp = -1, -1 # height, width previous
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img9
+ if i == 0: # center
+ img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ h0, w0 = h, w
+ c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
+ elif i == 1: # top
+ c = s, s - h, s + w, s
+ elif i == 2: # top right
+ c = s + wp, s - h, s + wp + w, s
+ elif i == 3: # right
+ c = s + w0, s, s + w0 + w, s + h
+ elif i == 4: # bottom right
+ c = s + w0, s + hp, s + w0 + w, s + hp + h
+ elif i == 5: # bottom
+ c = s + w0 - w, s + h0, s + w0, s + h0 + h
+ elif i == 6: # bottom left
+ c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
+ elif i == 7: # left
+ c = s - w, s + h0 - h, s, s + h0
+ elif i == 8: # top left
+ c = s - w, s + h0 - hp - h, s, s + h0 - hp
+
+ padx, pady = c[:2]
+ x1, y1, x2, y2 = (max(x, 0) for x in c) # allocate coords
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
+ labels9.append(labels)
+ segments9.extend(segments)
+
+ # Image
+ img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
+ hp, wp = h, w # height, width previous
+
+ # Offset
+ yc, xc = (int(random.uniform(0, s)) for _ in self.mosaic_border) # mosaic center x, y
+ img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
+
+ # Concat/clip labels
+ labels9 = np.concatenate(labels9, 0)
+ labels9[:, [1, 3]] -= xc
+ labels9[:, [2, 4]] -= yc
+ c = np.array([xc, yc]) # centers
+ segments9 = [x - c for x in segments9]
+
+ for x in (labels9[:, 1:], *segments9):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img9, labels9 = replicate(img9, labels9) # replicate
+
+ # Augment
+ img9, labels9 = random_perspective(img9,
+ labels9,
+ segments9,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img9, labels9
+
+ @staticmethod
+ def collate_fn(batch):
+ im, label, path, shapes = zip(*batch) # transposed
+ for i, lb in enumerate(label):
+ lb[:, 0] = i # add target image index for build_targets()
+ return torch.stack(im, 0), torch.cat(label, 0), path, shapes
+
+ @staticmethod
+ def collate_fn4(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ n = len(shapes) // 4
+ im4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
+
+ ho = torch.tensor([[0.0, 0, 0, 1, 0, 0]])
+ wo = torch.tensor([[0.0, 0, 1, 0, 0, 0]])
+ s = torch.tensor([[1, 1, 0.5, 0.5, 0.5, 0.5]]) # scale
+ for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
+ i *= 4
+ if random.random() < 0.5:
+ im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2.0, mode='bilinear',
+ align_corners=False)[0].type(img[i].type())
+ lb = label[i]
+ else:
+ im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
+ lb = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
+ im4.append(im)
+ label4.append(lb)
+
+ for i, lb in enumerate(label4):
+ lb[:, 0] = i # add target image index for build_targets()
+
+ return torch.stack(im4, 0), torch.cat(label4, 0), path4, shapes4
+
+
+# Ancillary functions --------------------------------------------------------------------------------------------------
+def flatten_recursive(path=DATASETS_DIR / 'coco128'):
+ # Flatten a recursive directory by bringing all files to top level
+ new_path = Path(f'{str(path)}_flat')
+ if os.path.exists(new_path):
+ shutil.rmtree(new_path) # delete output folder
+ os.makedirs(new_path) # make new output folder
+ for file in tqdm(glob.glob(f'{str(Path(path))}/**/*.*', recursive=True)):
+ shutil.copyfile(file, new_path / Path(file).name)
+
+
+def extract_boxes(path=DATASETS_DIR / 'coco128'): # from utils.dataloaders import *; extract_boxes()
+ # Convert detection dataset into classification dataset, with one directory per class
+ path = Path(path) # images dir
+ shutil.rmtree(path / 'classifier') if (path / 'classifier').is_dir() else None # remove existing
+ files = list(path.rglob('*.*'))
+ n = len(files) # number of files
+ for im_file in tqdm(files, total=n):
+ if im_file.suffix[1:] in IMG_FORMATS:
+ # image
+ im = cv2.imread(str(im_file))[..., ::-1] # BGR to RGB
+ h, w = im.shape[:2]
+
+ # labels
+ lb_file = Path(img2label_paths([str(im_file)])[0])
+ if Path(lb_file).exists():
+ with open(lb_file) as f:
+ lb = np.array([x.split() for x in f.read().strip().splitlines()], dtype=np.float32) # labels
+
+ for j, x in enumerate(lb):
+ c = int(x[0]) # class
+ f = (path / 'classifier') / f'{c}' / f'{path.stem}_{im_file.stem}_{j}.jpg' # new filename
+ if not f.parent.is_dir():
+ f.parent.mkdir(parents=True)
+
+ b = x[1:] * [w, h, w, h] # box
+ # b[2:] = b[2:].max() # rectangle to square
+ b[2:] = b[2:] * 1.2 + 3 # pad
+ b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
+
+ b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
+ b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
+ assert cv2.imwrite(str(f), im[b[1]:b[3], b[0]:b[2]]), f'box failure in {f}'
+
+
+def autosplit(path=DATASETS_DIR / 'coco128/images', weights=(0.9, 0.1, 0.0), annotated_only=False):
+ """ Autosplit a dataset into train/val/test splits and save path/autosplit_*.txt files
+ Usage: from utils.dataloaders import *; autosplit()
+ Arguments
+ path: Path to images directory
+ weights: Train, val, test weights (list, tuple)
+ annotated_only: Only use images with an annotated txt file
+ """
+ path = Path(path) # images dir
+ files = sorted(x for x in path.rglob('*.*') if x.suffix[1:].lower() in IMG_FORMATS) # image files only
+ n = len(files) # number of files
+ random.seed(0) # for reproducibility
+ indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
+
+ txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
+ [(path.parent / x).unlink(missing_ok=True) for x in txt] # remove existing
+
+ print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
+ for i, img in tqdm(zip(indices, files), total=n):
+ if not annotated_only or Path(img2label_paths([str(img)])[0]).exists(): # check label
+ with open(path.parent / txt[i], 'a') as f:
+ f.write(f'./{img.relative_to(path.parent).as_posix()}' + '\n') # add image to txt file
+
+
+def verify_image_label(args):
+ # Verify one image-label pair
+ im_file, lb_file, prefix = args
+ nm, nf, ne, nc, msg, segments = 0, 0, 0, 0, '', [] # number (missing, found, empty, corrupt), message, segments
+ try:
+ # verify images
+ im = Image.open(im_file)
+ im.verify() # PIL verify
+ shape = exif_size(im) # image size
+ assert (shape[0] > 9) & (shape[1] > 9), f'image size {shape} <10 pixels'
+ assert im.format.lower() in IMG_FORMATS, f'invalid image format {im.format}'
+ if im.format.lower() in ('jpg', 'jpeg'):
+ with open(im_file, 'rb') as f:
+ f.seek(-2, 2)
+ if f.read() != b'\xff\xd9': # corrupt JPEG
+ ImageOps.exif_transpose(Image.open(im_file)).save(im_file, 'JPEG', subsampling=0, quality=100)
+ msg = f'{prefix}WARNING: {im_file}: corrupt JPEG restored and saved'
+
+ # verify labels
+ if os.path.isfile(lb_file):
+ nf = 1 # label found
+ with open(lb_file) as f:
+ lb = [x.split() for x in f.read().strip().splitlines() if len(x)]
+ if any(len(x) > 6 for x in lb): # is segment
+ classes = np.array([x[0] for x in lb], dtype=np.float32)
+ segments = [np.array(x[1:], dtype=np.float32).reshape(-1, 2) for x in lb] # (cls, xy1...)
+ lb = np.concatenate((classes.reshape(-1, 1), segments2boxes(segments)), 1) # (cls, xywh)
+ lb = np.array(lb, dtype=np.float32)
+ nl = len(lb)
+ if nl:
+ assert lb.shape[1] == 5, f'labels require 5 columns, {lb.shape[1]} columns detected'
+ assert (lb >= 0).all(), f'negative label values {lb[lb < 0]}'
+ assert (lb[:, 1:] <= 1).all(), f'non-normalized or out of bounds coordinates {lb[:, 1:][lb[:, 1:] > 1]}'
+ _, i = np.unique(lb, axis=0, return_index=True)
+ if len(i) < nl: # duplicate row check
+ lb = lb[i] # remove duplicates
+ if segments:
+ #segments = segments[i]
+ segments = [segments[x] for x in i]
+ msg = f'{prefix}WARNING: {im_file}: {nl - len(i)} duplicate labels removed'
+ else:
+ ne = 1 # label empty
+ lb = np.zeros((0, 5), dtype=np.float32)
+ else:
+ nm = 1 # label missing
+ lb = np.zeros((0, 5), dtype=np.float32)
+ return im_file, lb, shape, segments, nm, nf, ne, nc, msg
+ except Exception as e:
+ nc = 1
+ msg = f'{prefix}WARNING: {im_file}: ignoring corrupt image/label: {e}'
+ return [None, None, None, None, nm, nf, ne, nc, msg]
+
+
+class HUBDatasetStats():
+ """ Return dataset statistics dictionary with images and instances counts per split per class
+ To run in parent directory: export PYTHONPATH="$PWD/yolov5"
+ Usage1: from utils.dataloaders import *; HUBDatasetStats('coco128.yaml', autodownload=True)
+ Usage2: from utils.dataloaders import *; HUBDatasetStats('path/to/coco128_with_yaml.zip')
+ Arguments
+ path: Path to data.yaml or data.zip (with data.yaml inside data.zip)
+ autodownload: Attempt to download dataset if not found locally
+ """
+
+ def __init__(self, path='coco128.yaml', autodownload=False):
+ # Initialize class
+ zipped, data_dir, yaml_path = self._unzip(Path(path))
+ try:
+ with open(check_yaml(yaml_path), errors='ignore') as f:
+ data = yaml.safe_load(f) # data dict
+ if zipped:
+ data['path'] = data_dir
+ except Exception as e:
+ raise Exception("error/HUB/dataset_stats/yaml_load") from e
+
+ check_dataset(data, autodownload) # download dataset if missing
+ self.hub_dir = Path(data['path'] + '-hub')
+ self.im_dir = self.hub_dir / 'images'
+ self.im_dir.mkdir(parents=True, exist_ok=True) # makes /images
+ self.stats = {'nc': data['nc'], 'names': data['names']} # statistics dictionary
+ self.data = data
+
+ @staticmethod
+ def _find_yaml(dir):
+ # Return data.yaml file
+ files = list(dir.glob('*.yaml')) or list(dir.rglob('*.yaml')) # try root level first and then recursive
+ assert files, f'No *.yaml file found in {dir}'
+ if len(files) > 1:
+ files = [f for f in files if f.stem == dir.stem] # prefer *.yaml files that match dir name
+ assert files, f'Multiple *.yaml files found in {dir}, only 1 *.yaml file allowed'
+ assert len(files) == 1, f'Multiple *.yaml files found: {files}, only 1 *.yaml file allowed in {dir}'
+ return files[0]
+
+ def _unzip(self, path):
+ # Unzip data.zip
+ if not str(path).endswith('.zip'): # path is data.yaml
+ return False, None, path
+ assert Path(path).is_file(), f'Error unzipping {path}, file not found'
+ ZipFile(path).extractall(path=path.parent) # unzip
+ dir = path.with_suffix('') # dataset directory == zip name
+ assert dir.is_dir(), f'Error unzipping {path}, {dir} not found. path/to/abc.zip MUST unzip to path/to/abc/'
+ return True, str(dir), self._find_yaml(dir) # zipped, data_dir, yaml_path
+
+ def _hub_ops(self, f, max_dim=1920):
+ # HUB ops for 1 image 'f': resize and save at reduced quality in /dataset-hub for web/app viewing
+ f_new = self.im_dir / Path(f).name # dataset-hub image filename
+ try: # use PIL
+ im = Image.open(f)
+ r = max_dim / max(im.height, im.width) # ratio
+ if r < 1.0: # image too large
+ im = im.resize((int(im.width * r), int(im.height * r)))
+ im.save(f_new, 'JPEG', quality=50, optimize=True) # save
+ except Exception as e: # use OpenCV
+ print(f'WARNING: HUB ops PIL failure {f}: {e}')
+ im = cv2.imread(f)
+ im_height, im_width = im.shape[:2]
+ r = max_dim / max(im_height, im_width) # ratio
+ if r < 1.0: # image too large
+ im = cv2.resize(im, (int(im_width * r), int(im_height * r)), interpolation=cv2.INTER_AREA)
+ cv2.imwrite(str(f_new), im)
+
+ def get_json(self, save=False, verbose=False):
+ # Return dataset JSON for Ultralytics HUB
+ def _round(labels):
+ # Update labels to integer class and 6 decimal place floats
+ return [[int(c), *(round(x, 4) for x in points)] for c, *points in labels]
+
+ for split in 'train', 'val', 'test':
+ if self.data.get(split) is None:
+ self.stats[split] = None # i.e. no test set
+ continue
+ dataset = LoadImagesAndLabels(self.data[split]) # load dataset
+ x = np.array([
+ np.bincount(label[:, 0].astype(int), minlength=self.data['nc'])
+ for label in tqdm(dataset.labels, total=dataset.n, desc='Statistics')]) # shape(128x80)
+ self.stats[split] = {
+ 'instance_stats': {
+ 'total': int(x.sum()),
+ 'per_class': x.sum(0).tolist()},
+ 'image_stats': {
+ 'total': dataset.n,
+ 'unlabelled': int(np.all(x == 0, 1).sum()),
+ 'per_class': (x > 0).sum(0).tolist()},
+ 'labels': [{
+ str(Path(k).name): _round(v.tolist())} for k, v in zip(dataset.im_files, dataset.labels)]}
+
+ # Save, print and return
+ if save:
+ stats_path = self.hub_dir / 'stats.json'
+ print(f'Saving {stats_path.resolve()}...')
+ with open(stats_path, 'w') as f:
+ json.dump(self.stats, f) # save stats.json
+ if verbose:
+ print(json.dumps(self.stats, indent=2, sort_keys=False))
+ return self.stats
+
+ def process_images(self):
+ # Compress images for Ultralytics HUB
+ for split in 'train', 'val', 'test':
+ if self.data.get(split) is None:
+ continue
+ dataset = LoadImagesAndLabels(self.data[split]) # load dataset
+ desc = f'{split} images'
+ for _ in tqdm(ThreadPool(NUM_THREADS).imap(self._hub_ops, dataset.im_files), total=dataset.n, desc=desc):
+ pass
+ print(f'Done. All images saved to {self.im_dir}')
+ return self.im_dir
+
+
+# Classification dataloaders -------------------------------------------------------------------------------------------
+class ClassificationDataset(torchvision.datasets.ImageFolder):
+ """
+ YOLOv5 Classification Dataset.
+ Arguments
+ root: Dataset path
+ transform: torchvision transforms, used by default
+ album_transform: Albumentations transforms, used if installed
+ """
+
+ def __init__(self, root, augment, imgsz, cache=False):
+ super().__init__(root=root)
+ self.torch_transforms = classify_transforms(imgsz)
+ self.album_transforms = classify_albumentations(augment, imgsz) if augment else None
+ self.cache_ram = cache is True or cache == 'ram'
+ self.cache_disk = cache == 'disk'
+ self.samples = [list(x) + [Path(x[0]).with_suffix('.npy'), None] for x in self.samples] # file, index, npy, im
+
+ def __getitem__(self, i):
+ f, j, fn, im = self.samples[i] # filename, index, filename.with_suffix('.npy'), image
+ if self.album_transforms:
+ if self.cache_ram and im is None:
+ im = self.samples[i][3] = cv2.imread(f)
+ elif self.cache_disk:
+ if not fn.exists(): # load npy
+ np.save(fn.as_posix(), cv2.imread(f))
+ im = np.load(fn)
+ else: # read image
+ im = cv2.imread(f) # BGR
+ sample = self.album_transforms(image=cv2.cvtColor(im, cv2.COLOR_BGR2RGB))["image"]
+ else:
+ sample = self.torch_transforms(self.loader(f))
+ return sample, j
+
+
+def create_classification_dataloader(path,
+ imgsz=224,
+ batch_size=16,
+ augment=True,
+ cache=False,
+ rank=-1,
+ workers=8,
+ shuffle=True):
+ # Returns Dataloader object to be used with YOLOv5 Classifier
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = ClassificationDataset(root=path, imgsz=imgsz, augment=augment, cache=cache)
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count()
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers])
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ generator = torch.Generator()
+ generator.manual_seed(0)
+ return InfiniteDataLoader(dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ worker_init_fn=seed_worker,
+ generator=generator) # or DataLoader(persistent_workers=True)
diff --git a/yolov7_seg/cls/utils/docker/Dockerfile b/yolov7_seg/cls/utils/docker/Dockerfile
new file mode 100644
index 000000000..d421c20c3
--- /dev/null
+++ b/yolov7_seg/cls/utils/docker/Dockerfile
@@ -0,0 +1,68 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is CUDA-optimized for YOLOv5 single/multi-GPU training and inference
+
+# Start FROM NVIDIA PyTorch image https://ngc.nvidia.com/catalog/containers/nvidia:pytorch
+FROM nvcr.io/nvidia/pytorch:22.07-py3
+RUN rm -rf /opt/pytorch # remove 1.2GB dir
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update && apt install --no-install-recommends -y zip htop screen libgl1-mesa-glx
+
+# Install pip packages
+COPY requirements.txt .
+RUN python -m pip install --upgrade pip wheel
+RUN pip uninstall -y Pillow torchtext # torch torchvision
+RUN pip install --no-cache -r requirements.txt albumentations wandb gsutil notebook Pillow>=9.1.0 \
+ 'opencv-python<4.6.0.66' \
+ --extra-index-url https://download.pytorch.org/whl/cu113
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+# Set environment variables
+ENV OMP_NUM_THREADS=8
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest && sudo docker build -f utils/docker/Dockerfile -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all $t
+
+# Pull and Run with local directory access
+# t=ultralytics/yolov5:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all -v "$(pwd)"/datasets:/usr/src/datasets $t
+
+# Kill all
+# sudo docker kill $(sudo docker ps -q)
+
+# Kill all image-based
+# sudo docker kill $(sudo docker ps -qa --filter ancestor=ultralytics/yolov5:latest)
+
+# Bash into running container
+# sudo docker exec -it 5a9b5863d93d bash
+
+# Bash into stopped container
+# id=$(sudo docker ps -qa) && sudo docker start $id && sudo docker exec -it $id bash
+
+# Clean up
+# docker system prune -a --volumes
+
+# Update Ubuntu drivers
+# https://www.maketecheasier.com/install-nvidia-drivers-ubuntu/
+
+# DDP test
+# python -m torch.distributed.run --nproc_per_node 2 --master_port 1 train.py --epochs 3
+
+# GCP VM from Image
+# docker.io/ultralytics/yolov5:latest
diff --git a/yolov7_seg/cls/utils/docker/Dockerfile-arm64 b/yolov7_seg/cls/utils/docker/Dockerfile-arm64
new file mode 100644
index 000000000..ebcf7ae0b
--- /dev/null
+++ b/yolov7_seg/cls/utils/docker/Dockerfile-arm64
@@ -0,0 +1,42 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest-arm64 image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is aarch64-compatible for Apple M1 and other ARM architectures i.e. Jetson Nano and Raspberry Pi
+
+# Start FROM Ubuntu image https://hub.docker.com/_/ubuntu
+FROM arm64v8/ubuntu:20.04
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update
+RUN DEBIAN_FRONTEND=noninteractive TZ=Etc/UTC apt install -y tzdata
+RUN apt install --no-install-recommends -y python3-pip git zip curl htop gcc \
+ libgl1-mesa-glx libglib2.0-0 libpython3.8-dev
+# RUN alias python=python3
+
+# Install pip packages
+COPY requirements.txt .
+RUN python3 -m pip install --upgrade pip wheel
+RUN pip install --no-cache -r requirements.txt gsutil notebook \
+ tensorflow-aarch64
+ # tensorflowjs \
+ # onnx onnx-simplifier onnxruntime \
+ # coremltools openvino-dev \
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest-M1 && sudo docker build --platform linux/arm64 -f utils/docker/Dockerfile-arm64 -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest-M1 && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
diff --git a/yolov7_seg/cls/utils/docker/Dockerfile-cpu b/yolov7_seg/cls/utils/docker/Dockerfile-cpu
new file mode 100644
index 000000000..e7d4e43eb
--- /dev/null
+++ b/yolov7_seg/cls/utils/docker/Dockerfile-cpu
@@ -0,0 +1,39 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest-cpu image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is CPU-optimized for ONNX, OpenVINO and PyTorch YOLOv5 deployments
+
+# Start FROM Ubuntu image https://hub.docker.com/_/ubuntu
+FROM ubuntu:20.04
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update
+RUN DEBIAN_FRONTEND=noninteractive TZ=Etc/UTC apt install -y tzdata
+RUN apt install --no-install-recommends -y python3-pip git zip curl htop libgl1-mesa-glx libglib2.0-0 libpython3.8-dev
+# RUN alias python=python3
+
+# Install pip packages
+COPY requirements.txt .
+RUN python3 -m pip install --upgrade pip wheel
+RUN pip install --no-cache -r requirements.txt albumentations gsutil notebook \
+ coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu tensorflowjs \
+ --extra-index-url https://download.pytorch.org/whl/cpu
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest-cpu && sudo docker build -f utils/docker/Dockerfile-cpu -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest-cpu && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
diff --git a/yolov7_seg/cls/utils/downloads.py b/yolov7_seg/cls/utils/downloads.py
new file mode 100644
index 000000000..c4c8f8bc2
--- /dev/null
+++ b/yolov7_seg/cls/utils/downloads.py
@@ -0,0 +1,180 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Download utils
+"""
+
+import logging
+import os
+import platform
+import subprocess
+import time
+import urllib
+from pathlib import Path
+from zipfile import ZipFile
+
+import requests
+import torch
+
+
+def is_url(url, check_online=True):
+ # Check if online file exists
+ try:
+ url = str(url)
+ result = urllib.parse.urlparse(url)
+ assert all([result.scheme, result.netloc, result.path]) # check if is url
+ return (urllib.request.urlopen(url).getcode() == 200) if check_online else True # check if exists online
+ except (AssertionError, urllib.request.HTTPError):
+ return False
+
+
+def gsutil_getsize(url=''):
+ # gs://bucket/file size https://cloud.google.com/storage/docs/gsutil/commands/du
+ s = subprocess.check_output(f'gsutil du {url}', shell=True).decode('utf-8')
+ return eval(s.split(' ')[0]) if len(s) else 0 # bytes
+
+
+def safe_download(file, url, url2=None, min_bytes=1E0, error_msg=''):
+ # Attempts to download file from url or url2, checks and removes incomplete downloads < min_bytes
+ from utils.general import LOGGER
+
+ file = Path(file)
+ assert_msg = f"Downloaded file '{file}' does not exist or size is < min_bytes={min_bytes}"
+ try: # url1
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, str(file), progress=LOGGER.level <= logging.INFO)
+ assert file.exists() and file.stat().st_size > min_bytes, assert_msg # check
+ except Exception as e: # url2
+ file.unlink(missing_ok=True) # remove partial downloads
+ LOGGER.info(f'ERROR: {e}\nRe-attempting {url2 or url} to {file}...')
+ os.system(f"curl -L '{url2 or url}' -o '{file}' --retry 3 -C -") # curl download, retry and resume on fail
+ finally:
+ if not file.exists() or file.stat().st_size < min_bytes: # check
+ file.unlink(missing_ok=True) # remove partial downloads
+ LOGGER.info(f"ERROR: {assert_msg}\n{error_msg}")
+ LOGGER.info('')
+
+
+def attempt_download(file, repo='ultralytics/yolov5', release='v6.1'):
+ # Attempt file download from GitHub release assets if not found locally. release = 'latest', 'v6.1', etc.
+ from utils.general import LOGGER
+
+ def github_assets(repository, version='latest'):
+ # Return GitHub repo tag (i.e. 'v6.1') and assets (i.e. ['yolov5s.pt', 'yolov5m.pt', ...])
+ if version != 'latest':
+ version = f'tags/{version}' # i.e. tags/v6.1
+ response = requests.get(f'https://api.github.com/repos/{repository}/releases/{version}').json() # github api
+ return response['tag_name'], [x['name'] for x in response['assets']] # tag, assets
+
+ file = Path(str(file).strip().replace("'", ''))
+ if not file.exists():
+ # URL specified
+ name = Path(urllib.parse.unquote(str(file))).name # decode '%2F' to '/' etc.
+ if str(file).startswith(('http:/', 'https:/')): # download
+ url = str(file).replace(':/', '://') # Pathlib turns :// -> :/
+ file = name.split('?')[0] # parse authentication https://url.com/file.txt?auth...
+ if Path(file).is_file():
+ LOGGER.info(f'Found {url} locally at {file}') # file already exists
+ else:
+ safe_download(file=file, url=url, min_bytes=1E5)
+ return file
+
+ # GitHub assets
+ assets = [
+ 'yolov5n.pt', 'yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt', 'yolov5n6.pt', 'yolov5s6.pt',
+ 'yolov5m6.pt', 'yolov5l6.pt', 'yolov5x6.pt']
+ try:
+ tag, assets = github_assets(repo, release)
+ except Exception:
+ try:
+ tag, assets = github_assets(repo) # latest release
+ except Exception:
+ try:
+ tag = subprocess.check_output('git tag', shell=True, stderr=subprocess.STDOUT).decode().split()[-1]
+ except Exception:
+ tag = release
+
+ file.parent.mkdir(parents=True, exist_ok=True) # make parent dir (if required)
+ if name in assets:
+ url3 = 'https://drive.google.com/drive/folders/1EFQTEUeXWSFww0luse2jB9M1QNZQGwNl' # backup gdrive mirror
+ safe_download(
+ file,
+ url=f'https://github.com/{repo}/releases/download/{tag}/{name}',
+ url2=f'https://storage.googleapis.com/{repo}/{tag}/{name}', # backup url (optional)
+ min_bytes=1E5,
+ error_msg=f'{file} missing, try downloading from https://github.com/{repo}/releases/{tag} or {url3}')
+
+ return str(file)
+
+
+def gdrive_download(id='16TiPfZj7htmTyhntwcZyEEAejOUxuT6m', file='tmp.zip'):
+ # Downloads a file from Google Drive. from yolov5.utils.downloads import *; gdrive_download()
+ t = time.time()
+ file = Path(file)
+ cookie = Path('cookie') # gdrive cookie
+ print(f'Downloading https://drive.google.com/uc?export=download&id={id} as {file}... ', end='')
+ file.unlink(missing_ok=True) # remove existing file
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Attempt file download
+ out = "NUL" if platform.system() == "Windows" else "/dev/null"
+ os.system(f'curl -c ./cookie -s -L "drive.google.com/uc?export=download&id={id}" > {out}')
+ if os.path.exists('cookie'): # large file
+ s = f'curl -Lb ./cookie "drive.google.com/uc?export=download&confirm={get_token()}&id={id}" -o {file}'
+ else: # small file
+ s = f'curl -s -L -o {file} "drive.google.com/uc?export=download&id={id}"'
+ r = os.system(s) # execute, capture return
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Error check
+ if r != 0:
+ file.unlink(missing_ok=True) # remove partial
+ print('Download error ') # raise Exception('Download error')
+ return r
+
+ # Unzip if archive
+ if file.suffix == '.zip':
+ print('unzipping... ', end='')
+ ZipFile(file).extractall(path=file.parent) # unzip
+ file.unlink() # remove zip
+
+ print(f'Done ({time.time() - t:.1f}s)')
+ return r
+
+
+def get_token(cookie="./cookie"):
+ with open(cookie) as f:
+ for line in f:
+ if "download" in line:
+ return line.split()[-1]
+ return ""
+
+
+# Google utils: https://cloud.google.com/storage/docs/reference/libraries ----------------------------------------------
+#
+#
+# def upload_blob(bucket_name, source_file_name, destination_blob_name):
+# # Uploads a file to a bucket
+# # https://cloud.google.com/storage/docs/uploading-objects#storage-upload-object-python
+#
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(destination_blob_name)
+#
+# blob.upload_from_filename(source_file_name)
+#
+# print('File {} uploaded to {}.'.format(
+# source_file_name,
+# destination_blob_name))
+#
+#
+# def download_blob(bucket_name, source_blob_name, destination_file_name):
+# # Uploads a blob from a bucket
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(source_blob_name)
+#
+# blob.download_to_filename(destination_file_name)
+#
+# print('Blob {} downloaded to {}.'.format(
+# source_blob_name,
+# destination_file_name))
diff --git a/yolov7_seg/cls/utils/flask_rest_api/README.md b/yolov7_seg/cls/utils/flask_rest_api/README.md
new file mode 100644
index 000000000..9de4da470
--- /dev/null
+++ b/yolov7_seg/cls/utils/flask_rest_api/README.md
@@ -0,0 +1,73 @@
+# Flask REST API
+
+[REST](https://en.wikipedia.org/wiki/Representational_state_transfer) [API](https://en.wikipedia.org/wiki/API)s are
+commonly used to expose Machine Learning (ML) models to other services. This folder contains an example REST API
+created using Flask to expose the YOLOv5s model from [PyTorch Hub](https://pytorch.org/hub/ultralytics_yolov5/).
+
+## Requirements
+
+[Flask](https://palletsprojects.com/p/flask/) is required. Install with:
+
+```shell
+$ pip install Flask
+```
+
+## Run
+
+After Flask installation run:
+
+```shell
+$ python3 restapi.py --port 5000
+```
+
+Then use [curl](https://curl.se/) to perform a request:
+
+```shell
+$ curl -X POST -F image=@zidane.jpg 'http://localhost:5000/v1/object-detection/yolov5s'
+```
+
+The model inference results are returned as a JSON response:
+
+```json
+[
+ {
+ "class": 0,
+ "confidence": 0.8900438547,
+ "height": 0.9318675399,
+ "name": "person",
+ "width": 0.3264600933,
+ "xcenter": 0.7438579798,
+ "ycenter": 0.5207948685
+ },
+ {
+ "class": 0,
+ "confidence": 0.8440024257,
+ "height": 0.7155083418,
+ "name": "person",
+ "width": 0.6546785235,
+ "xcenter": 0.427829951,
+ "ycenter": 0.6334488392
+ },
+ {
+ "class": 27,
+ "confidence": 0.3771208823,
+ "height": 0.3902671337,
+ "name": "tie",
+ "width": 0.0696444362,
+ "xcenter": 0.3675483763,
+ "ycenter": 0.7991207838
+ },
+ {
+ "class": 27,
+ "confidence": 0.3527112305,
+ "height": 0.1540903747,
+ "name": "tie",
+ "width": 0.0336618312,
+ "xcenter": 0.7814827561,
+ "ycenter": 0.5065554976
+ }
+]
+```
+
+An example python script to perform inference using [requests](https://docs.python-requests.org/en/master/) is given
+in `example_request.py`
diff --git a/yolov7_seg/cls/utils/flask_rest_api/example_request.py b/yolov7_seg/cls/utils/flask_rest_api/example_request.py
new file mode 100644
index 000000000..9c898143e
--- /dev/null
+++ b/yolov7_seg/cls/utils/flask_rest_api/example_request.py
@@ -0,0 +1,19 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Perform test request
+"""
+
+import pprint
+
+import requests
+
+DETECTION_URL = "http://localhost:5000/v1/object-detection/yolov5s"
+IMAGE = "zidane.jpg"
+
+# Read image
+with open(IMAGE, "rb") as f:
+ image_data = f.read()
+
+response = requests.post(DETECTION_URL, files={"image": image_data}).json()
+
+pprint.pprint(response)
diff --git a/yolov7_seg/cls/utils/flask_rest_api/restapi.py b/yolov7_seg/cls/utils/flask_rest_api/restapi.py
new file mode 100644
index 000000000..c333ee2a1
--- /dev/null
+++ b/yolov7_seg/cls/utils/flask_rest_api/restapi.py
@@ -0,0 +1,46 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run a Flask REST API exposing a YOLOv5s model
+"""
+
+import argparse
+import io
+
+import torch
+from flask import Flask, request
+from PIL import Image
+
+app = Flask(__name__)
+
+DETECTION_URL = "/v1/object-detection/yolov5s"
+
+
+@app.route(DETECTION_URL, methods=["POST"])
+def predict():
+ if request.method != "POST":
+ return
+
+ if request.files.get("image"):
+ # Method 1
+ # with request.files["image"] as f:
+ # im = Image.open(io.BytesIO(f.read()))
+
+ # Method 2
+ im_file = request.files["image"]
+ im_bytes = im_file.read()
+ im = Image.open(io.BytesIO(im_bytes))
+
+ results = model(im, size=640) # reduce size=320 for faster inference
+ return results.pandas().xyxy[0].to_json(orient="records")
+
+
+if __name__ == "__main__":
+ parser = argparse.ArgumentParser(description="Flask API exposing YOLOv5 model")
+ parser.add_argument("--port", default=5000, type=int, help="port number")
+ opt = parser.parse_args()
+
+ # Fix known issue urllib.error.HTTPError 403: rate limit exceeded https://github.com/ultralytics/yolov5/pull/7210
+ torch.hub._validate_not_a_forked_repo = lambda a, b, c: True
+
+ model = torch.hub.load("ultralytics/yolov5", "yolov5s", force_reload=True) # force_reload to recache
+ app.run(host="0.0.0.0", port=opt.port) # debug=True causes Restarting with stat
diff --git a/yolov7_seg/cls/utils/general.py b/yolov7_seg/cls/utils/general.py
new file mode 100644
index 000000000..b3ebc3a68
--- /dev/null
+++ b/yolov7_seg/cls/utils/general.py
@@ -0,0 +1,1043 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+General utils
+"""
+
+import contextlib
+import glob
+import inspect
+import logging
+import math
+import os
+import platform
+import random
+import re
+import shutil
+import signal
+import sys
+import threading
+import time
+import urllib
+from datetime import datetime
+from itertools import repeat
+from multiprocessing.pool import ThreadPool
+from pathlib import Path
+from subprocess import check_output
+from typing import Optional
+from zipfile import ZipFile
+
+import cv2
+import numpy as np
+import pandas as pd
+import pkg_resources as pkg
+import torch
+import torchvision
+import yaml
+
+from utils.downloads import gsutil_getsize
+from utils.metrics import box_iou, fitness
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+RANK = int(os.getenv('RANK', -1))
+
+# Settings
+DATASETS_DIR = ROOT.parent / 'datasets' # YOLOv5 datasets directory
+NUM_THREADS = min(8, max(1, os.cpu_count() - 1)) # number of YOLOv5 multiprocessing threads
+AUTOINSTALL = str(os.getenv('YOLOv5_AUTOINSTALL', True)).lower() == 'true' # global auto-install mode
+VERBOSE = str(os.getenv('YOLOv5_VERBOSE', True)).lower() == 'true' # global verbose mode
+FONT = 'Arial.ttf' # https://ultralytics.com/assets/Arial.ttf
+
+torch.set_printoptions(linewidth=320, precision=5, profile='long')
+np.set_printoptions(linewidth=320, formatter={'float_kind': '{:11.5g}'.format}) # format short g, %precision=5
+pd.options.display.max_columns = 10
+cv2.setNumThreads(0) # prevent OpenCV from multithreading (incompatible with PyTorch DataLoader)
+os.environ['NUMEXPR_MAX_THREADS'] = str(NUM_THREADS) # NumExpr max threads
+os.environ['OMP_NUM_THREADS'] = '1' if platform.system() == 'darwin' else str(NUM_THREADS) # OpenMP (PyTorch and SciPy)
+
+
+def is_kaggle():
+ # Is environment a Kaggle Notebook?
+ try:
+ assert os.environ.get('PWD') == '/kaggle/working'
+ assert os.environ.get('KAGGLE_URL_BASE') == 'https://www.kaggle.com'
+ return True
+ except AssertionError:
+ return False
+
+
+def is_writeable(dir, test=False):
+ # Return True if directory has write permissions, test opening a file with write permissions if test=True
+ if not test:
+ return os.access(dir, os.R_OK) # possible issues on Windows
+ file = Path(dir) / 'tmp.txt'
+ try:
+ with open(file, 'w'): # open file with write permissions
+ pass
+ file.unlink() # remove file
+ return True
+ except OSError:
+ return False
+
+
+def set_logging(name=None, verbose=VERBOSE):
+ # Sets level and returns logger
+ if is_kaggle():
+ for h in logging.root.handlers:
+ logging.root.removeHandler(h) # remove all handlers associated with the root logger object
+ rank = int(os.getenv('RANK', -1)) # rank in world for Multi-GPU trainings
+ level = logging.INFO if verbose and rank in {-1, 0} else logging.ERROR
+ log = logging.getLogger(name)
+ log.setLevel(level)
+ handler = logging.StreamHandler()
+ handler.setFormatter(logging.Formatter("%(message)s"))
+ handler.setLevel(level)
+ log.addHandler(handler)
+
+
+set_logging() # run before defining LOGGER
+LOGGER = logging.getLogger("yolov5") # define globally (used in train.py, val.py, detect.py, etc.)
+
+
+def user_config_dir(dir='Ultralytics', env_var='YOLOV5_CONFIG_DIR'):
+ # Return path of user configuration directory. Prefer environment variable if exists. Make dir if required.
+ env = os.getenv(env_var)
+ if env:
+ path = Path(env) # use environment variable
+ else:
+ cfg = {'Windows': 'AppData/Roaming', 'Linux': '.config', 'Darwin': 'Library/Application Support'} # 3 OS dirs
+ path = Path.home() / cfg.get(platform.system(), '') # OS-specific config dir
+ path = (path if is_writeable(path) else Path('/tmp')) / dir # GCP and AWS lambda fix, only /tmp is writeable
+ path.mkdir(exist_ok=True) # make if required
+ return path
+
+
+CONFIG_DIR = user_config_dir() # Ultralytics settings dir
+
+
+class Profile(contextlib.ContextDecorator):
+ # Usage: @Profile() decorator or 'with Profile():' context manager
+ def __enter__(self):
+ self.start = time.time()
+
+ def __exit__(self, type, value, traceback):
+ print(f'Profile results: {time.time() - self.start:.5f}s')
+
+
+class Timeout(contextlib.ContextDecorator):
+ # Usage: @Timeout(seconds) decorator or 'with Timeout(seconds):' context manager
+ def __init__(self, seconds, *, timeout_msg='', suppress_timeout_errors=True):
+ self.seconds = int(seconds)
+ self.timeout_message = timeout_msg
+ self.suppress = bool(suppress_timeout_errors)
+
+ def _timeout_handler(self, signum, frame):
+ raise TimeoutError(self.timeout_message)
+
+ def __enter__(self):
+ if platform.system() != 'Windows': # not supported on Windows
+ signal.signal(signal.SIGALRM, self._timeout_handler) # Set handler for SIGALRM
+ signal.alarm(self.seconds) # start countdown for SIGALRM to be raised
+
+ def __exit__(self, exc_type, exc_val, exc_tb):
+ if platform.system() != 'Windows':
+ signal.alarm(0) # Cancel SIGALRM if it's scheduled
+ if self.suppress and exc_type is TimeoutError: # Suppress TimeoutError
+ return True
+
+
+class WorkingDirectory(contextlib.ContextDecorator):
+ # Usage: @WorkingDirectory(dir) decorator or 'with WorkingDirectory(dir):' context manager
+ def __init__(self, new_dir):
+ self.dir = new_dir # new dir
+ self.cwd = Path.cwd().resolve() # current dir
+
+ def __enter__(self):
+ os.chdir(self.dir)
+
+ def __exit__(self, exc_type, exc_val, exc_tb):
+ os.chdir(self.cwd)
+
+
+def try_except(func):
+ # try-except function. Usage: @try_except decorator
+ def handler(*args, **kwargs):
+ try:
+ func(*args, **kwargs)
+ except Exception as e:
+ print(e)
+
+ return handler
+
+
+def threaded(func):
+ # Multi-threads a target function and returns thread. Usage: @threaded decorator
+ def wrapper(*args, **kwargs):
+ thread = threading.Thread(target=func, args=args, kwargs=kwargs, daemon=True)
+ thread.start()
+ return thread
+
+ return wrapper
+
+
+def methods(instance):
+ # Get class/instance methods
+ return [f for f in dir(instance) if callable(getattr(instance, f)) and not f.startswith("__")]
+
+
+def print_args(args: Optional[dict] = None, show_file=True, show_fcn=False):
+ # Print function arguments (optional args dict)
+ x = inspect.currentframe().f_back # previous frame
+ file, _, fcn, _, _ = inspect.getframeinfo(x)
+ if args is None: # get args automatically
+ args, _, _, frm = inspect.getargvalues(x)
+ args = {k: v for k, v in frm.items() if k in args}
+ s = (f'{Path(file).stem}: ' if show_file else '') + (f'{fcn}: ' if show_fcn else '')
+ LOGGER.info(colorstr(s) + ', '.join(f'{k}={v}' for k, v in args.items()))
+
+
+def init_seeds(seed=0, deterministic=False):
+ # Initialize random number generator (RNG) seeds https://pytorch.org/docs/stable/notes/randomness.html
+ # cudnn seed 0 settings are slower and more reproducible, else faster and less reproducible
+ import torch.backends.cudnn as cudnn
+
+ if deterministic and check_version(torch.__version__, '1.12.0'): # https://github.com/ultralytics/yolov5/pull/8213
+ torch.use_deterministic_algorithms(True)
+ os.environ['CUBLAS_WORKSPACE_CONFIG'] = ':4096:8'
+ os.environ['PYTHONHASHSEED'] = str(seed)
+
+ random.seed(seed)
+ np.random.seed(seed)
+ torch.manual_seed(seed)
+ cudnn.benchmark, cudnn.deterministic = (False, True) if seed == 0 else (True, False)
+ torch.cuda.manual_seed(seed)
+ torch.cuda.manual_seed_all(seed) # for Multi-GPU, exception safe
+
+
+def intersect_dicts(da, db, exclude=()):
+ # Dictionary intersection of matching keys and shapes, omitting 'exclude' keys, using da values
+ return {k: v for k, v in da.items() if k in db and not any(x in k for x in exclude) and v.shape == db[k].shape}
+
+
+def get_latest_run(search_dir='.'):
+ # Return path to most recent 'last.pt' in /runs (i.e. to --resume from)
+ last_list = glob.glob(f'{search_dir}/**/last*.pt', recursive=True)
+ return max(last_list, key=os.path.getctime) if last_list else ''
+
+
+def is_docker() -> bool:
+ """Check if the process runs inside a docker container."""
+ if Path("/.dockerenv").exists():
+ return True
+ try: # check if docker is in control groups
+ with open("/proc/self/cgroup") as file:
+ return any("docker" in line for line in file)
+ except OSError:
+ return False
+
+
+def is_colab():
+ # Is environment a Google Colab instance?
+ try:
+ import google.colab
+ return True
+ except ImportError:
+ return False
+
+
+def is_pip():
+ # Is file in a pip package?
+ return 'site-packages' in Path(__file__).resolve().parts
+
+
+def is_ascii(s=''):
+ # Is string composed of all ASCII (no UTF) characters? (note str().isascii() introduced in python 3.7)
+ s = str(s) # convert list, tuple, None, etc. to str
+ return len(s.encode().decode('ascii', 'ignore')) == len(s)
+
+
+def is_chinese(s='人工智能'):
+ # Is string composed of any Chinese characters?
+ return bool(re.search('[\u4e00-\u9fff]', str(s)))
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+def file_age(path=__file__):
+ # Return days since last file update
+ dt = (datetime.now() - datetime.fromtimestamp(Path(path).stat().st_mtime)) # delta
+ return dt.days # + dt.seconds / 86400 # fractional days
+
+
+def file_date(path=__file__):
+ # Return human-readable file modification date, i.e. '2021-3-26'
+ t = datetime.fromtimestamp(Path(path).stat().st_mtime)
+ return f'{t.year}-{t.month}-{t.day}'
+
+
+def file_size(path):
+ # Return file/dir size (MB)
+ mb = 1 << 20 # bytes to MiB (1024 ** 2)
+ path = Path(path)
+ if path.is_file():
+ return path.stat().st_size / mb
+ elif path.is_dir():
+ return sum(f.stat().st_size for f in path.glob('**/*') if f.is_file()) / mb
+ else:
+ return 0.0
+
+
+def check_online():
+ # Check internet connectivity
+ import socket
+ try:
+ socket.create_connection(("1.1.1.1", 443), 5) # check host accessibility
+ return True
+ except OSError:
+ return False
+
+
+def git_describe(path=ROOT): # path must be a directory
+ # Return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
+ try:
+ assert (Path(path) / '.git').is_dir()
+ return check_output(f'git -C {path} describe --tags --long --always', shell=True).decode()[:-1]
+ except Exception:
+ return ''
+
+
+@try_except
+@WorkingDirectory(ROOT)
+def check_git_status(repo='ultralytics/yolov5'):
+ # YOLOv5 status check, recommend 'git pull' if code is out of date
+ url = f'https://github.com/{repo}'
+ msg = f', for updates see {url}'
+ s = colorstr('github: ') # string
+ assert Path('.git').exists(), s + 'skipping check (not a git repository)' + msg
+ assert check_online(), s + 'skipping check (offline)' + msg
+
+ splits = re.split(pattern=r'\s', string=check_output('git remote -v', shell=True).decode())
+ matches = [repo in s for s in splits]
+ if any(matches):
+ remote = splits[matches.index(True) - 1]
+ else:
+ remote = 'ultralytics'
+ check_output(f'git remote add {remote} {url}', shell=True)
+ check_output(f'git fetch {remote}', shell=True, timeout=5) # git fetch
+ branch = check_output('git rev-parse --abbrev-ref HEAD', shell=True).decode().strip() # checked out
+ n = int(check_output(f'git rev-list {branch}..{remote}/master --count', shell=True)) # commits behind
+ if n > 0:
+ pull = 'git pull' if remote == 'origin' else f'git pull {remote} master'
+ s += f"⚠️ YOLOv5 is out of date by {n} commit{'s' * (n > 1)}. Use `{pull}` or `git clone {url}` to update."
+ else:
+ s += f'up to date with {url} ✅'
+ LOGGER.info(emojis(s)) # emoji-safe
+
+
+def check_python(minimum='3.7.0'):
+ # Check current python version vs. required python version
+ check_version(platform.python_version(), minimum, name='Python ', hard=True)
+
+
+def check_version(current='0.0.0', minimum='0.0.0', name='version ', pinned=False, hard=False, verbose=False):
+ # Check version vs. required version
+ current, minimum = (pkg.parse_version(x) for x in (current, minimum))
+ result = (current == minimum) if pinned else (current >= minimum) # bool
+ s = f'{name}{minimum} required by YOLOv5, but {name}{current} is currently installed' # string
+ if hard:
+ assert result, s # assert min requirements met
+ if verbose and not result:
+ LOGGER.warning(s)
+ return result
+
+
+@try_except
+def check_requirements(requirements=ROOT / 'requirements.txt', exclude=(), install=True, cmds=()):
+ # Check installed dependencies meet requirements (pass *.txt file or list of packages)
+ prefix = colorstr('red', 'bold', 'requirements:')
+ check_python() # check python version
+ if isinstance(requirements, (str, Path)): # requirements.txt file
+ file = Path(requirements)
+ assert file.exists(), f"{prefix} {file.resolve()} not found, check failed."
+ with file.open() as f:
+ requirements = [f'{x.name}{x.specifier}' for x in pkg.parse_requirements(f) if x.name not in exclude]
+ else: # list or tuple of packages
+ requirements = [x for x in requirements if x not in exclude]
+
+ n = 0 # number of packages updates
+ for i, r in enumerate(requirements):
+ try:
+ pkg.require(r)
+ except Exception: # DistributionNotFound or VersionConflict if requirements not met
+ s = f"{prefix} {r} not found and is required by YOLOv5"
+ if install and AUTOINSTALL: # check environment variable
+ LOGGER.info(f"{s}, attempting auto-update...")
+ try:
+ assert check_online(), f"'pip install {r}' skipped (offline)"
+ LOGGER.info(check_output(f'pip install "{r}" {cmds[i] if cmds else ""}', shell=True).decode())
+ n += 1
+ except Exception as e:
+ LOGGER.warning(f'{prefix} {e}')
+ else:
+ LOGGER.info(f'{s}. Please install and rerun your command.')
+
+ if n: # if packages updated
+ source = file.resolve() if 'file' in locals() else requirements
+ s = f"{prefix} {n} package{'s' * (n > 1)} updated per {source}\n" \
+ f"{prefix} ⚠️ {colorstr('bold', 'Restart runtime or rerun command for updates to take effect')}\n"
+ LOGGER.info(emojis(s))
+
+
+def check_img_size(imgsz, s=32, floor=0):
+ # Verify image size is a multiple of stride s in each dimension
+ if isinstance(imgsz, int): # integer i.e. img_size=640
+ new_size = max(make_divisible(imgsz, int(s)), floor)
+ else: # list i.e. img_size=[640, 480]
+ imgsz = list(imgsz) # convert to list if tuple
+ new_size = [max(make_divisible(x, int(s)), floor) for x in imgsz]
+ if new_size != imgsz:
+ LOGGER.warning(f'WARNING: --img-size {imgsz} must be multiple of max stride {s}, updating to {new_size}')
+ return new_size
+
+
+def check_imshow():
+ # Check if environment supports image displays
+ try:
+ assert not is_docker(), 'cv2.imshow() is disabled in Docker environments'
+ assert not is_colab(), 'cv2.imshow() is disabled in Google Colab environments'
+ cv2.imshow('test', np.zeros((1, 1, 3)))
+ cv2.waitKey(1)
+ cv2.destroyAllWindows()
+ cv2.waitKey(1)
+ return True
+ except Exception as e:
+ LOGGER.warning(f'WARNING: Environment does not support cv2.imshow() or PIL Image.show() image displays\n{e}')
+ return False
+
+
+def check_suffix(file='yolov5s.pt', suffix=('.pt',), msg=''):
+ # Check file(s) for acceptable suffix
+ if file and suffix:
+ if isinstance(suffix, str):
+ suffix = [suffix]
+ for f in file if isinstance(file, (list, tuple)) else [file]:
+ s = Path(f).suffix.lower() # file suffix
+ if len(s):
+ assert s in suffix, f"{msg}{f} acceptable suffix is {suffix}"
+
+
+def check_yaml(file, suffix=('.yaml', '.yml')):
+ # Search/download YAML file (if necessary) and return path, checking suffix
+ return check_file(file, suffix)
+
+
+def check_file(file, suffix=''):
+ # Search/download file (if necessary) and return path
+ check_suffix(file, suffix) # optional
+ file = str(file) # convert to str()
+ if Path(file).is_file() or not file: # exists
+ return file
+ elif file.startswith(('http:/', 'https:/')): # download
+ url = file # warning: Pathlib turns :// -> :/
+ file = Path(urllib.parse.unquote(file).split('?')[0]).name # '%2F' to '/', split https://url.com/file.txt?auth
+ if Path(file).is_file():
+ LOGGER.info(f'Found {url} locally at {file}') # file already exists
+ else:
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, file)
+ assert Path(file).exists() and Path(file).stat().st_size > 0, f'File download failed: {url}' # check
+ return file
+ elif file.startswith('clearml://'): # ClearML Dataset ID
+ assert 'clearml' in sys.modules, "ClearML is not installed, so cannot use ClearML dataset. Try running 'pip install clearml'."
+ return file
+ else: # search
+ files = []
+ for d in 'data', 'models', 'utils': # search directories
+ files.extend(glob.glob(str(ROOT / d / '**' / file), recursive=True)) # find file
+ assert len(files), f'File not found: {file}' # assert file was found
+ assert len(files) == 1, f"Multiple files match '{file}', specify exact path: {files}" # assert unique
+ return files[0] # return file
+
+
+def check_font(font=FONT, progress=False):
+ # Download font to CONFIG_DIR if necessary
+ font = Path(font)
+ file = CONFIG_DIR / font.name
+ if not font.exists() and not file.exists():
+ url = "https://ultralytics.com/assets/" + font.name
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, str(file), progress=progress)
+
+
+def check_dataset(data, autodownload=True):
+ # Download, check and/or unzip dataset if not found locally
+
+ # Download (optional)
+ extract_dir = ''
+ if isinstance(data, (str, Path)) and str(data).endswith('.zip'): # i.e. gs://bucket/dir/coco128.zip
+ download(data, dir=DATASETS_DIR, unzip=True, delete=False, curl=False, threads=1)
+ data = next((DATASETS_DIR / Path(data).stem).rglob('*.yaml'))
+ extract_dir, autodownload = data.parent, False
+
+ # Read yaml (optional)
+ if isinstance(data, (str, Path)):
+ with open(data, errors='ignore') as f:
+ data = yaml.safe_load(f) # dictionary
+
+ # Checks
+ for k in 'train', 'val', 'nc':
+ assert k in data, emojis(f"data.yaml '{k}:' field missing ❌")
+ if 'names' not in data:
+ LOGGER.warning(emojis("data.yaml 'names:' field missing ⚠️, assigning default names 'class0', 'class1', etc."))
+ data['names'] = [f'class{i}' for i in range(data['nc'])] # default names
+
+ # Resolve paths
+ path = Path(extract_dir or data.get('path') or '') # optional 'path' default to '.'
+ if not path.is_absolute():
+ path = (ROOT / path).resolve()
+ for k in 'train', 'val', 'test':
+ if data.get(k): # prepend path
+ data[k] = str(path / data[k]) if isinstance(data[k], str) else [str(path / x) for x in data[k]]
+
+ # Parse yaml
+ train, val, test, s = (data.get(x) for x in ('train', 'val', 'test', 'download'))
+ if val:
+ val = [Path(x).resolve() for x in (val if isinstance(val, list) else [val])] # val path
+ if not all(x.exists() for x in val):
+ LOGGER.info(emojis('\nDataset not found ⚠️, missing paths %s' % [str(x) for x in val if not x.exists()]))
+ if not s or not autodownload:
+ raise Exception(emojis('Dataset not found ❌'))
+ t = time.time()
+ root = path.parent if 'path' in data else '..' # unzip directory i.e. '../'
+ if s.startswith('http') and s.endswith('.zip'): # URL
+ f = Path(s).name # filename
+ LOGGER.info(f'Downloading {s} to {f}...')
+ torch.hub.download_url_to_file(s, f)
+ Path(root).mkdir(parents=True, exist_ok=True) # create root
+ ZipFile(f).extractall(path=root) # unzip
+ Path(f).unlink() # remove zip
+ r = None # success
+ elif s.startswith('bash '): # bash script
+ LOGGER.info(f'Running {s} ...')
+ r = os.system(s)
+ else: # python script
+ r = exec(s, {'yaml': data}) # return None
+ dt = f'({round(time.time() - t, 1)}s)'
+ s = f"success ✅ {dt}, saved to {colorstr('bold', root)}" if r in (0, None) else f"failure {dt} ❌"
+ LOGGER.info(emojis(f"Dataset download {s}"))
+ check_font('Arial.ttf' if is_ascii(data['names']) else 'Arial.Unicode.ttf', progress=True) # download fonts
+ return data # dictionary
+
+
+def check_amp(model):
+ # Check PyTorch Automatic Mixed Precision (AMP) functionality. Return True on correct operation
+ from models.common import AutoShape, DetectMultiBackend
+
+ def amp_allclose(model, im):
+ # All close FP32 vs AMP results
+ m = AutoShape(model, verbose=False) # model
+ a = m(im).xywhn[0] # FP32 inference
+ m.amp = True
+ b = m(im).xywhn[0] # AMP inference
+ return a.shape == b.shape and torch.allclose(a, b, atol=0.1) # close to 10% absolute tolerance
+
+ prefix = colorstr('AMP: ')
+ device = next(model.parameters()).device # get model device
+ if device.type == 'cpu':
+ return False # AMP disabled on CPU
+ f = ROOT / 'data' / 'images' / 'bus.jpg' # image to check
+ im = f if f.exists() else 'https://ultralytics.com/images/bus.jpg' if check_online() else np.ones((640, 640, 3))
+ try:
+ assert amp_allclose(model, im) or amp_allclose(DetectMultiBackend('yolov5n.pt', device), im)
+ LOGGER.info(emojis(f'{prefix}checks passed ✅'))
+ return True
+ except Exception:
+ help_url = 'https://github.com/ultralytics/yolov5/issues/7908'
+ LOGGER.warning(emojis(f'{prefix}checks failed ❌, disabling Automatic Mixed Precision. See {help_url}'))
+ return False
+
+
+def url2file(url):
+ # Convert URL to filename, i.e. https://url.com/file.txt?auth -> file.txt
+ url = str(Path(url)).replace(':/', '://') # Pathlib turns :// -> :/
+ return Path(urllib.parse.unquote(url)).name.split('?')[0] # '%2F' to '/', split https://url.com/file.txt?auth
+
+
+def download(url, dir='.', unzip=True, delete=True, curl=False, threads=1, retry=3):
+ # Multi-threaded file download and unzip function, used in data.yaml for autodownload
+ def download_one(url, dir):
+ # Download 1 file
+ success = True
+ f = dir / Path(url).name # filename
+ if Path(url).is_file(): # exists in current path
+ Path(url).rename(f) # move to dir
+ elif not f.exists():
+ LOGGER.info(f'Downloading {url} to {f}...')
+ for i in range(retry + 1):
+ if curl:
+ s = 'sS' if threads > 1 else '' # silent
+ r = os.system(f'curl -{s}L "{url}" -o "{f}" --retry 9 -C -') # curl download with retry, continue
+ success = r == 0
+ else:
+ torch.hub.download_url_to_file(url, f, progress=threads == 1) # torch download
+ success = f.is_file()
+ if success:
+ break
+ elif i < retry:
+ LOGGER.warning(f'Download failure, retrying {i + 1}/{retry} {url}...')
+ else:
+ LOGGER.warning(f'Failed to download {url}...')
+
+ if unzip and success and f.suffix in ('.zip', '.gz'):
+ LOGGER.info(f'Unzipping {f}...')
+ if f.suffix == '.zip':
+ ZipFile(f).extractall(path=dir) # unzip
+ elif f.suffix == '.gz':
+ os.system(f'tar xfz {f} --directory {f.parent}') # unzip
+ if delete:
+ f.unlink() # remove zip
+
+ dir = Path(dir)
+ dir.mkdir(parents=True, exist_ok=True) # make directory
+ if threads > 1:
+ pool = ThreadPool(threads)
+ pool.imap(lambda x: download_one(*x), zip(url, repeat(dir))) # multi-threaded
+ pool.close()
+ pool.join()
+ else:
+ for u in [url] if isinstance(url, (str, Path)) else url:
+ download_one(u, dir)
+
+
+def make_divisible(x, divisor):
+ # Returns nearest x divisible by divisor
+ if isinstance(divisor, torch.Tensor):
+ divisor = int(divisor.max()) # to int
+ return math.ceil(x / divisor) * divisor
+
+
+def clean_str(s):
+ # Cleans a string by replacing special characters with underscore _
+ return re.sub(pattern="[|@#!¡·$€%&()=?¿^*;:,¨´><+]", repl="_", string=s)
+
+
+def one_cycle(y1=0.0, y2=1.0, steps=100):
+ # lambda function for sinusoidal ramp from y1 to y2 https://arxiv.org/pdf/1812.01187.pdf
+ return lambda x: ((1 - math.cos(x * math.pi / steps)) / 2) * (y2 - y1) + y1
+
+
+def colorstr(*input):
+ # Colors a string https://en.wikipedia.org/wiki/ANSI_escape_code, i.e. colorstr('blue', 'hello world')
+ *args, string = input if len(input) > 1 else ('blue', 'bold', input[0]) # color arguments, string
+ colors = {
+ 'black': '\033[30m', # basic colors
+ 'red': '\033[31m',
+ 'green': '\033[32m',
+ 'yellow': '\033[33m',
+ 'blue': '\033[34m',
+ 'magenta': '\033[35m',
+ 'cyan': '\033[36m',
+ 'white': '\033[37m',
+ 'bright_black': '\033[90m', # bright colors
+ 'bright_red': '\033[91m',
+ 'bright_green': '\033[92m',
+ 'bright_yellow': '\033[93m',
+ 'bright_blue': '\033[94m',
+ 'bright_magenta': '\033[95m',
+ 'bright_cyan': '\033[96m',
+ 'bright_white': '\033[97m',
+ 'end': '\033[0m', # misc
+ 'bold': '\033[1m',
+ 'underline': '\033[4m'}
+ return ''.join(colors[x] for x in args) + f'{string}' + colors['end']
+
+
+def labels_to_class_weights(labels, nc=80):
+ # Get class weights (inverse frequency) from training labels
+ if labels[0] is None: # no labels loaded
+ return torch.Tensor()
+
+ labels = np.concatenate(labels, 0) # labels.shape = (866643, 5) for COCO
+ classes = labels[:, 0].astype(int) # labels = [class xywh]
+ weights = np.bincount(classes, minlength=nc) # occurrences per class
+
+ # Prepend gridpoint count (for uCE training)
+ # gpi = ((320 / 32 * np.array([1, 2, 4])) ** 2 * 3).sum() # gridpoints per image
+ # weights = np.hstack([gpi * len(labels) - weights.sum() * 9, weights * 9]) ** 0.5 # prepend gridpoints to start
+
+ weights[weights == 0] = 1 # replace empty bins with 1
+ weights = 1 / weights # number of targets per class
+ weights /= weights.sum() # normalize
+ return torch.from_numpy(weights).float()
+
+
+def labels_to_image_weights(labels, nc=80, class_weights=np.ones(80)):
+ # Produces image weights based on class_weights and image contents
+ # Usage: index = random.choices(range(n), weights=image_weights, k=1) # weighted image sample
+ class_counts = np.array([np.bincount(x[:, 0].astype(int), minlength=nc) for x in labels])
+ return (class_weights.reshape(1, nc) * class_counts).sum(1)
+
+
+def coco80_to_coco91_class(): # converts 80-index (val2014) to 91-index (paper)
+ # https://tech.amikelive.com/node-718/what-object-categories-labels-are-in-coco-dataset/
+ # a = np.loadtxt('data/coco.names', dtype='str', delimiter='\n')
+ # b = np.loadtxt('data/coco_paper.names', dtype='str', delimiter='\n')
+ # x1 = [list(a[i] == b).index(True) + 1 for i in range(80)] # darknet to coco
+ # x2 = [list(b[i] == a).index(True) if any(b[i] == a) else None for i in range(91)] # coco to darknet
+ return [
+ 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 27, 28, 31, 32, 33, 34,
+ 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63,
+ 64, 65, 67, 70, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 84, 85, 86, 87, 88, 89, 90]
+
+
+def xyxy2xywh(x):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = (x[:, 0] + x[:, 2]) / 2 # x center
+ y[:, 1] = (x[:, 1] + x[:, 3]) / 2 # y center
+ y[:, 2] = x[:, 2] - x[:, 0] # width
+ y[:, 3] = x[:, 3] - x[:, 1] # height
+ return y
+
+
+def xywh2xyxy(x):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
+ y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
+ y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
+ y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
+ return y
+
+
+def xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):
+ # Convert nx4 boxes from [x, y, w, h] normalized to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * (x[:, 0] - x[:, 2] / 2) + padw # top left x
+ y[:, 1] = h * (x[:, 1] - x[:, 3] / 2) + padh # top left y
+ y[:, 2] = w * (x[:, 0] + x[:, 2] / 2) + padw # bottom right x
+ y[:, 3] = h * (x[:, 1] + x[:, 3] / 2) + padh # bottom right y
+ return y
+
+
+def xyxy2xywhn(x, w=640, h=640, clip=False, eps=0.0):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] normalized where xy1=top-left, xy2=bottom-right
+ if clip:
+ clip_coords(x, (h - eps, w - eps)) # warning: inplace clip
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = ((x[:, 0] + x[:, 2]) / 2) / w # x center
+ y[:, 1] = ((x[:, 1] + x[:, 3]) / 2) / h # y center
+ y[:, 2] = (x[:, 2] - x[:, 0]) / w # width
+ y[:, 3] = (x[:, 3] - x[:, 1]) / h # height
+ return y
+
+
+def xyn2xy(x, w=640, h=640, padw=0, padh=0):
+ # Convert normalized segments into pixel segments, shape (n,2)
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * x[:, 0] + padw # top left x
+ y[:, 1] = h * x[:, 1] + padh # top left y
+ return y
+
+
+def segment2box(segment, width=640, height=640):
+ # Convert 1 segment label to 1 box label, applying inside-image constraint, i.e. (xy1, xy2, ...) to (xyxy)
+ x, y = segment.T # segment xy
+ inside = (x >= 0) & (y >= 0) & (x <= width) & (y <= height)
+ x, y, = x[inside], y[inside]
+ return np.array([x.min(), y.min(), x.max(), y.max()]) if any(x) else np.zeros((1, 4)) # xyxy
+
+
+def segments2boxes(segments):
+ # Convert segment labels to box labels, i.e. (cls, xy1, xy2, ...) to (cls, xywh)
+ boxes = []
+ for s in segments:
+ x, y = s.T # segment xy
+ boxes.append([x.min(), y.min(), x.max(), y.max()]) # cls, xyxy
+ return xyxy2xywh(np.array(boxes)) # cls, xywh
+
+
+def resample_segments(segments, n=1000):
+ # Up-sample an (n,2) segment
+ for i, s in enumerate(segments):
+ s = np.concatenate((s, s[0:1, :]), axis=0)
+ x = np.linspace(0, len(s) - 1, n)
+ xp = np.arange(len(s))
+ segments[i] = np.concatenate([np.interp(x, xp, s[:, i]) for i in range(2)]).reshape(2, -1).T # segment xy
+ return segments
+
+
+def scale_coords(img1_shape, coords, img0_shape, ratio_pad=None):
+ # Rescale coords (xyxy) from img1_shape to img0_shape
+ if ratio_pad is None: # calculate from img0_shape
+ gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
+ pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
+ else:
+ gain = ratio_pad[0][0]
+ pad = ratio_pad[1]
+
+ coords[:, [0, 2]] -= pad[0] # x padding
+ coords[:, [1, 3]] -= pad[1] # y padding
+ coords[:, :4] /= gain
+ clip_coords(coords, img0_shape)
+ return coords
+
+
+def clip_coords(boxes, shape):
+ # Clip bounding xyxy bounding boxes to image shape (height, width)
+ if isinstance(boxes, torch.Tensor): # faster individually
+ boxes[:, 0].clamp_(0, shape[1]) # x1
+ boxes[:, 1].clamp_(0, shape[0]) # y1
+ boxes[:, 2].clamp_(0, shape[1]) # x2
+ boxes[:, 3].clamp_(0, shape[0]) # y2
+ else: # np.array (faster grouped)
+ boxes[:, [0, 2]] = boxes[:, [0, 2]].clip(0, shape[1]) # x1, x2
+ boxes[:, [1, 3]] = boxes[:, [1, 3]].clip(0, shape[0]) # y1, y2
+
+
+def non_max_suppression(prediction,
+ conf_thres=0.25,
+ iou_thres=0.45,
+ classes=None,
+ agnostic=False,
+ multi_label=False,
+ labels=(),
+ max_det=300):
+ """Non-Maximum Suppression (NMS) on inference results to reject overlapping bounding boxes
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+
+ bs = prediction.shape[0] # batch size
+ nc = prediction.shape[2] - 5 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Checks
+ assert 0 <= conf_thres <= 1, f'Invalid Confidence threshold {conf_thres}, valid values are between 0.0 and 1.0'
+ assert 0 <= iou_thres <= 1, f'Invalid IoU {iou_thres}, valid values are between 0.0 and 1.0'
+
+ # Settings
+ # min_wh = 2 # (pixels) minimum box width and height
+ max_wh = 7680 # (pixels) maximum box width and height
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 0.3 + 0.03 * bs # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0, 6), device=prediction.device)] * bs
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ lb = labels[xi]
+ v = torch.zeros((len(lb), nc + 5), device=x.device)
+ v[:, :4] = lb[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(lb)), lb[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ LOGGER.warning(f'WARNING: NMS time limit {time_limit:.3f}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def strip_optimizer(f='best.pt', s=''): # from utils.general import *; strip_optimizer()
+ # Strip optimizer from 'f' to finalize training, optionally save as 's'
+ x = torch.load(f, map_location=torch.device('cpu'))
+ if x.get('ema'):
+ x['model'] = x['ema'] # replace model with ema
+ for k in 'optimizer', 'best_fitness', 'wandb_id', 'ema', 'updates': # keys
+ x[k] = None
+ x['epoch'] = -1
+ x['model'].half() # to FP16
+ for p in x['model'].parameters():
+ p.requires_grad = False
+ torch.save(x, s or f)
+ mb = os.path.getsize(s or f) / 1E6 # filesize
+ LOGGER.info(f"Optimizer stripped from {f},{f' saved as {s},' if s else ''} {mb:.1f}MB")
+
+
+def print_mutation(results, hyp, save_dir, bucket, prefix=colorstr('evolve: ')):
+ evolve_csv = save_dir / 'evolve.csv'
+ evolve_yaml = save_dir / 'hyp_evolve.yaml'
+ keys = ('metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/mAP_0.5:0.95', 'val/box_loss',
+ 'val/obj_loss', 'val/cls_loss') + tuple(hyp.keys()) # [results + hyps]
+ keys = tuple(x.strip() for x in keys)
+ vals = results + tuple(hyp.values())
+ n = len(keys)
+
+ # Download (optional)
+ if bucket:
+ url = f'gs://{bucket}/evolve.csv'
+ if gsutil_getsize(url) > (evolve_csv.stat().st_size if evolve_csv.exists() else 0):
+ os.system(f'gsutil cp {url} {save_dir}') # download evolve.csv if larger than local
+
+ # Log to evolve.csv
+ s = '' if evolve_csv.exists() else (('%20s,' * n % keys).rstrip(',') + '\n') # add header
+ with open(evolve_csv, 'a') as f:
+ f.write(s + ('%20.5g,' * n % vals).rstrip(',') + '\n')
+
+ # Save yaml
+ with open(evolve_yaml, 'w') as f:
+ data = pd.read_csv(evolve_csv)
+ data = data.rename(columns=lambda x: x.strip()) # strip keys
+ i = np.argmax(fitness(data.values[:, :4])) #
+ generations = len(data)
+ f.write('# YOLOv5 Hyperparameter Evolution Results\n' + f'# Best generation: {i}\n' +
+ f'# Last generation: {generations - 1}\n' + '# ' + ', '.join(f'{x.strip():>20s}' for x in keys[:7]) +
+ '\n' + '# ' + ', '.join(f'{x:>20.5g}' for x in data.values[i, :7]) + '\n\n')
+ yaml.safe_dump(data.loc[i][7:].to_dict(), f, sort_keys=False)
+
+ # Print to screen
+ LOGGER.info(prefix + f'{generations} generations finished, current result:\n' + prefix +
+ ', '.join(f'{x.strip():>20s}' for x in keys) + '\n' + prefix + ', '.join(f'{x:20.5g}'
+ for x in vals) + '\n\n')
+
+ if bucket:
+ os.system(f'gsutil cp {evolve_csv} {evolve_yaml} gs://{bucket}') # upload
+
+
+def apply_classifier(x, model, img, im0):
+ # Apply a second stage classifier to YOLO outputs
+ # Example model = torchvision.models.__dict__['efficientnet_b0'](pretrained=True).to(device).eval()
+ im0 = [im0] if isinstance(im0, np.ndarray) else im0
+ for i, d in enumerate(x): # per image
+ if d is not None and len(d):
+ d = d.clone()
+
+ # Reshape and pad cutouts
+ b = xyxy2xywh(d[:, :4]) # boxes
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # rectangle to square
+ b[:, 2:] = b[:, 2:] * 1.3 + 30 # pad
+ d[:, :4] = xywh2xyxy(b).long()
+
+ # Rescale boxes from img_size to im0 size
+ scale_coords(img.shape[2:], d[:, :4], im0[i].shape)
+
+ # Classes
+ pred_cls1 = d[:, 5].long()
+ ims = []
+ for a in d:
+ cutout = im0[i][int(a[1]):int(a[3]), int(a[0]):int(a[2])]
+ im = cv2.resize(cutout, (224, 224)) # BGR
+
+ im = im[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ im = np.ascontiguousarray(im, dtype=np.float32) # uint8 to float32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ ims.append(im)
+
+ pred_cls2 = model(torch.Tensor(ims).to(d.device)).argmax(1) # classifier prediction
+ x[i] = x[i][pred_cls1 == pred_cls2] # retain matching class detections
+
+ return x
+
+
+def increment_path(path, exist_ok=False, sep='', mkdir=False):
+ # Increment file or directory path, i.e. runs/exp --> runs/exp{sep}2, runs/exp{sep}3, ... etc.
+ path = Path(path) # os-agnostic
+ if path.exists() and not exist_ok:
+ path, suffix = (path.with_suffix(''), path.suffix) if path.is_file() else (path, '')
+
+ # Method 1
+ for n in range(2, 9999):
+ p = f'{path}{sep}{n}{suffix}' # increment path
+ if not os.path.exists(p): #
+ break
+ path = Path(p)
+
+ # Method 2 (deprecated)
+ # dirs = glob.glob(f"{path}{sep}*") # similar paths
+ # matches = [re.search(rf"{path.stem}{sep}(\d+)", d) for d in dirs]
+ # i = [int(m.groups()[0]) for m in matches if m] # indices
+ # n = max(i) + 1 if i else 2 # increment number
+ # path = Path(f"{path}{sep}{n}{suffix}") # increment path
+
+ if mkdir:
+ path.mkdir(parents=True, exist_ok=True) # make directory
+
+ return path
+
+
+# OpenCV Chinese-friendly functions ------------------------------------------------------------------------------------
+imshow_ = cv2.imshow # copy to avoid recursion errors
+
+
+def imread(path, flags=cv2.IMREAD_COLOR):
+ return cv2.imdecode(np.fromfile(path, np.uint8), flags)
+
+
+def imwrite(path, im):
+ try:
+ cv2.imencode(Path(path).suffix, im)[1].tofile(path)
+ return True
+ except Exception:
+ return False
+
+
+def imshow(path, im):
+ imshow_(path.encode('unicode_escape').decode(), im)
+
+
+cv2.imread, cv2.imwrite, cv2.imshow = imread, imwrite, imshow # redefine
+
+# Variables ------------------------------------------------------------------------------------------------------------
+NCOLS = 0 if is_docker() else shutil.get_terminal_size().columns # terminal window size for tqdm
diff --git a/yolov7_seg/cls/utils/google_app_engine/Dockerfile b/yolov7_seg/cls/utils/google_app_engine/Dockerfile
new file mode 100644
index 000000000..d889610b1
--- /dev/null
+++ b/yolov7_seg/cls/utils/google_app_engine/Dockerfile
@@ -0,0 +1,25 @@
+FROM gcr.io/google-appengine/python
+
+# Create a virtualenv for dependencies. This isolates these packages from
+# system-level packages.
+# Use -p python3 or -p python3.7 to select python version. Default is version 2.
+RUN virtualenv /env -p python3
+
+# Setting these environment variables are the same as running
+# source /env/bin/activate.
+ENV VIRTUAL_ENV /env
+ENV PATH /env/bin:$PATH
+
+RUN apt-get update && apt-get install -y python-opencv
+
+# Copy the application's requirements.txt and run pip to install all
+# dependencies into the virtualenv.
+ADD requirements.txt /app/requirements.txt
+RUN pip install -r /app/requirements.txt
+
+# Add the application source code.
+ADD . /app
+
+# Run a WSGI server to serve the application. gunicorn must be declared as
+# a dependency in requirements.txt.
+CMD gunicorn -b :$PORT main:app
diff --git a/yolov7_seg/cls/utils/google_app_engine/additional_requirements.txt b/yolov7_seg/cls/utils/google_app_engine/additional_requirements.txt
new file mode 100644
index 000000000..ed71f8407
--- /dev/null
+++ b/yolov7_seg/cls/utils/google_app_engine/additional_requirements.txt
@@ -0,0 +1,4 @@
+# add these requirements in your app on top of the existing ones
+pip==21.1
+Flask==1.0.2
+gunicorn==19.9.0
diff --git a/yolov7_seg/cls/utils/google_app_engine/app.yaml b/yolov7_seg/cls/utils/google_app_engine/app.yaml
new file mode 100644
index 000000000..1cad968c6
--- /dev/null
+++ b/yolov7_seg/cls/utils/google_app_engine/app.yaml
@@ -0,0 +1,14 @@
+runtime: custom
+env: flex
+
+service: yolov5app
+
+liveness_check:
+ initial_delay_sec: 600
+
+manual_scaling:
+ instances: 1
+resources:
+ cpu: 1
+ memory_gb: 4
+ disk_size_gb: 20
diff --git a/yolov7_seg/cls/utils/loggers/__init__.py b/yolov7_seg/cls/utils/loggers/__init__.py
new file mode 100644
index 000000000..73327c3e5
--- /dev/null
+++ b/yolov7_seg/cls/utils/loggers/__init__.py
@@ -0,0 +1,308 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Logging utils
+"""
+
+import os
+import warnings
+from pathlib import Path
+
+import pkg_resources as pkg
+import torch
+from torch.utils.tensorboard import SummaryWriter
+
+from utils.general import colorstr, cv2, emojis
+from utils.loggers.clearml.clearml_utils import ClearmlLogger
+from utils.loggers.wandb.wandb_utils import WandbLogger
+from utils.plots import plot_images, plot_results
+from utils.torch_utils import de_parallel
+
+LOGGERS = ('csv', 'tb', 'wandb', 'clearml') # *.csv, TensorBoard, Weights & Biases, ClearML
+RANK = int(os.getenv('RANK', -1))
+
+try:
+ import wandb
+
+ assert hasattr(wandb, '__version__') # verify package import not local dir
+ if pkg.parse_version(wandb.__version__) >= pkg.parse_version('0.12.2') and RANK in {0, -1}:
+ try:
+ wandb_login_success = wandb.login(timeout=30)
+ except wandb.errors.UsageError: # known non-TTY terminal issue
+ wandb_login_success = False
+ if not wandb_login_success:
+ wandb = None
+except (ImportError, AssertionError):
+ wandb = None
+
+try:
+ import clearml
+
+ assert hasattr(clearml, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ clearml = None
+
+
+class Loggers():
+ # YOLOv5 Loggers class
+ def __init__(self, save_dir=None, weights=None, opt=None, hyp=None, logger=None, include=LOGGERS):
+ self.save_dir = save_dir
+ self.weights = weights
+ self.opt = opt
+ self.hyp = hyp
+ self.logger = logger # for printing results to console
+ self.include = include
+ self.keys = [
+ 'train/box_loss',
+ 'train/obj_loss',
+ 'train/cls_loss', # train loss
+ 'metrics/precision',
+ 'metrics/recall',
+ 'metrics/mAP_0.5',
+ 'metrics/mAP_0.5:0.95', # metrics
+ 'val/box_loss',
+ 'val/obj_loss',
+ 'val/cls_loss', # val loss
+ 'x/lr0',
+ 'x/lr1',
+ 'x/lr2'] # params
+ self.best_keys = ['best/epoch', 'best/precision', 'best/recall', 'best/mAP_0.5', 'best/mAP_0.5:0.95']
+ for k in LOGGERS:
+ setattr(self, k, None) # init empty logger dictionary
+ self.csv = True # always log to csv
+
+ # Messages
+ if not wandb:
+ prefix = colorstr('Weights & Biases: ')
+ s = f"{prefix}run 'pip install wandb' to automatically track and visualize YOLOv5 🚀 runs in Weights & Biases"
+ self.logger.info(emojis(s))
+ if not clearml:
+ prefix = colorstr('ClearML: ')
+ s = f"{prefix}run 'pip install clearml' to automatically track, visualize and remotely train YOLOv5 🚀 runs in ClearML"
+ self.logger.info(emojis(s))
+
+ # TensorBoard
+ s = self.save_dir
+ if 'tb' in self.include and not self.opt.evolve:
+ prefix = colorstr('TensorBoard: ')
+ self.logger.info(f"{prefix}Start with 'tensorboard --logdir {s.parent}', view at http://localhost:6006/")
+ self.tb = SummaryWriter(str(s))
+
+ # W&B
+ if wandb and 'wandb' in self.include:
+ wandb_artifact_resume = isinstance(self.opt.resume, str) and self.opt.resume.startswith('wandb-artifact://')
+ run_id = torch.load(self.weights).get('wandb_id') if self.opt.resume and not wandb_artifact_resume else None
+ self.opt.hyp = self.hyp # add hyperparameters
+ self.wandb = WandbLogger(self.opt, run_id)
+ # temp warn. because nested artifacts not supported after 0.12.10
+ if pkg.parse_version(wandb.__version__) >= pkg.parse_version('0.12.11'):
+ s = "YOLOv5 temporarily requires wandb version 0.12.10 or below. Some features may not work as expected."
+ self.logger.warning(s)
+ else:
+ self.wandb = None
+
+ # ClearML
+ if clearml and 'clearml' in self.include:
+ self.clearml = ClearmlLogger(self.opt, self.hyp)
+ else:
+ self.clearml = None
+
+ def on_train_start(self):
+ # Callback runs on train start
+ pass
+
+ def on_pretrain_routine_end(self):
+ # Callback runs on pre-train routine end
+ paths = self.save_dir.glob('*labels*.jpg') # training labels
+ if self.wandb:
+ self.wandb.log({"Labels": [wandb.Image(str(x), caption=x.name) for x in paths]})
+ if self.clearml:
+ pass # ClearML saves these images automatically using hooks
+
+ def on_train_batch_end(self, ni, model, imgs, targets, paths, plots):
+ # Callback runs on train batch end
+ # ni: number integrated batches (since train start)
+ if plots:
+ if ni == 0 and not self.opt.sync_bn and self.tb:
+ log_tensorboard_graph(self.tb, model, imgsz=list(imgs.shape[2:4]))
+ if ni < 3:
+ f = self.save_dir / f'train_batch{ni}.jpg' # filename
+ plot_images(imgs, targets, paths, f)
+ if (self.wandb or self.clearml) and ni == 10:
+ files = sorted(self.save_dir.glob('train*.jpg'))
+ if self.wandb:
+ self.wandb.log({'Mosaics': [wandb.Image(str(f), caption=f.name) for f in files if f.exists()]})
+ if self.clearml:
+ self.clearml.log_debug_samples(files, title='Mosaics')
+
+ def on_train_epoch_end(self, epoch):
+ # Callback runs on train epoch end
+ if self.wandb:
+ self.wandb.current_epoch = epoch + 1
+
+ def on_val_image_end(self, pred, predn, path, names, im):
+ # Callback runs on val image end
+ if self.wandb:
+ self.wandb.val_one_image(pred, predn, path, names, im)
+ if self.clearml:
+ self.clearml.log_image_with_boxes(path, pred, names, im)
+
+ def on_val_end(self):
+ # Callback runs on val end
+ if self.wandb or self.clearml:
+ files = sorted(self.save_dir.glob('val*.jpg'))
+ if self.wandb:
+ self.wandb.log({"Validation": [wandb.Image(str(f), caption=f.name) for f in files]})
+ if self.clearml:
+ self.clearml.log_debug_samples(files, title='Validation')
+
+ def on_fit_epoch_end(self, vals, epoch, best_fitness, fi):
+ # Callback runs at the end of each fit (train+val) epoch
+ x = dict(zip(self.keys, vals))
+ if self.csv:
+ file = self.save_dir / 'results.csv'
+ n = len(x) + 1 # number of cols
+ s = '' if file.exists() else (('%20s,' * n % tuple(['epoch'] + self.keys)).rstrip(',') + '\n') # add header
+ with open(file, 'a') as f:
+ f.write(s + ('%20.5g,' * n % tuple([epoch] + vals)).rstrip(',') + '\n')
+
+ if self.tb:
+ for k, v in x.items():
+ self.tb.add_scalar(k, v, epoch)
+ elif self.clearml: # log to ClearML if TensorBoard not used
+ for k, v in x.items():
+ title, series = k.split('/')
+ self.clearml.task.get_logger().report_scalar(title, series, v, epoch)
+
+ if self.wandb:
+ if best_fitness == fi:
+ best_results = [epoch] + vals[3:7]
+ for i, name in enumerate(self.best_keys):
+ self.wandb.wandb_run.summary[name] = best_results[i] # log best results in the summary
+ self.wandb.log(x)
+ self.wandb.end_epoch(best_result=best_fitness == fi)
+
+ if self.clearml:
+ self.clearml.current_epoch_logged_images = set() # reset epoch image limit
+ self.clearml.current_epoch += 1
+
+ def on_model_save(self, last, epoch, final_epoch, best_fitness, fi):
+ # Callback runs on model save event
+ if self.wandb:
+ if ((epoch + 1) % self.opt.save_period == 0 and not final_epoch) and self.opt.save_period != -1:
+ self.wandb.log_model(last.parent, self.opt, epoch, fi, best_model=best_fitness == fi)
+
+ if self.clearml:
+ if ((epoch + 1) % self.opt.save_period == 0 and not final_epoch) and self.opt.save_period != -1:
+ self.clearml.task.update_output_model(model_path=str(last),
+ model_name='Latest Model',
+ auto_delete_file=False)
+
+ def on_train_end(self, last, best, plots, epoch, results):
+ # Callback runs on training end
+ if plots:
+ plot_results(file=self.save_dir / 'results.csv') # save results.png
+ files = ['results.png', 'confusion_matrix.png', *(f'{x}_curve.png' for x in ('F1', 'PR', 'P', 'R'))]
+ files = [(self.save_dir / f) for f in files if (self.save_dir / f).exists()] # filter
+ self.logger.info(f"Results saved to {colorstr('bold', self.save_dir)}")
+
+ if self.tb and not self.clearml: # These images are already captured by ClearML by now, we don't want doubles
+ for f in files:
+ self.tb.add_image(f.stem, cv2.imread(str(f))[..., ::-1], epoch, dataformats='HWC')
+
+ if self.wandb:
+ self.wandb.log(dict(zip(self.keys[3:10], results)))
+ self.wandb.log({"Results": [wandb.Image(str(f), caption=f.name) for f in files]})
+ # Calling wandb.log. TODO: Refactor this into WandbLogger.log_model
+ if not self.opt.evolve:
+ wandb.log_artifact(str(best if best.exists() else last),
+ type='model',
+ name=f'run_{self.wandb.wandb_run.id}_model',
+ aliases=['latest', 'best', 'stripped'])
+ self.wandb.finish_run()
+
+ if self.clearml:
+ # Save the best model here
+ if not self.opt.evolve:
+ self.clearml.task.update_output_model(model_path=str(best if best.exists() else last),
+ name='Best Model')
+
+ def on_params_update(self, params):
+ # Update hyperparams or configs of the experiment
+ # params: A dict containing {param: value} pairs
+ if self.wandb:
+ self.wandb.wandb_run.config.update(params, allow_val_change=True)
+
+
+class GenericLogger:
+ """
+ YOLOv5 General purpose logger for non-task specific logging
+ Usage: from utils.loggers import GenericLogger; logger = GenericLogger(...)
+ Arguments
+ opt: Run arguments
+ console_logger: Console logger
+ include: loggers to include
+ """
+
+ def __init__(self, opt, console_logger, include=('tb', 'wandb')):
+ # init default loggers
+ self.save_dir = opt.save_dir
+ self.include = include
+ self.console_logger = console_logger
+ if 'tb' in self.include:
+ prefix = colorstr('TensorBoard: ')
+ self.console_logger.info(
+ f"{prefix}Start with 'tensorboard --logdir {self.save_dir.parent}', view at http://localhost:6006/")
+ self.tb = SummaryWriter(str(self.save_dir))
+
+ if wandb and 'wandb' in self.include:
+ self.wandb = wandb.init(project="YOLOv5-Classifier" if opt.project == "runs/train" else opt.project,
+ name=None if opt.name == "exp" else opt.name,
+ config=opt)
+ else:
+ self.wandb = None
+
+ def log_metrics(self, metrics_dict, epoch):
+ # Log metrics dictionary to all loggers
+ if self.tb:
+ for k, v in metrics_dict.items():
+ self.tb.add_scalar(k, v, epoch)
+
+ if self.wandb:
+ self.wandb.log(metrics_dict, step=epoch)
+
+ def log_images(self, files, name='Images', epoch=0):
+ # Log images to all loggers
+ files = [Path(f) for f in (files if isinstance(files, (tuple, list)) else [files])] # to Path
+ files = [f for f in files if f.exists()] # filter by exists
+
+ if self.tb:
+ for f in files:
+ self.tb.add_image(f.stem, cv2.imread(str(f))[..., ::-1], epoch, dataformats='HWC')
+
+ if self.wandb:
+ self.wandb.log({name: [wandb.Image(str(f), caption=f.name) for f in files]}, step=epoch)
+
+ def log_graph(self, model, imgsz=(640, 640)):
+ # Log model graph to all loggers
+ if self.tb:
+ log_tensorboard_graph(self.tb, model, imgsz)
+
+ def log_model(self, model_path, epoch=0, metadata={}):
+ # Log model to all loggers
+ if self.wandb:
+ art = wandb.Artifact(name=f"run_{wandb.run.id}_model", type="model", metadata=metadata)
+ art.add_file(str(model_path))
+ wandb.log_artifact(art)
+
+
+def log_tensorboard_graph(tb, model, imgsz=(640, 640)):
+ # Log model graph to TensorBoard
+ try:
+ p = next(model.parameters()) # for device, type
+ imgsz = (imgsz, imgsz) if isinstance(imgsz, int) else imgsz # expand
+ im = torch.zeros((1, 3, *imgsz)).to(p.device).type_as(p) # input image
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress jit trace warning
+ tb.add_graph(torch.jit.trace(de_parallel(model), im, strict=False), [])
+ except Exception:
+ print('WARNING: TensorBoard graph visualization failure')
diff --git a/yolov7_seg/cls/utils/loggers/clearml/README.md b/yolov7_seg/cls/utils/loggers/clearml/README.md
new file mode 100644
index 000000000..5eccb08b9
--- /dev/null
+++ b/yolov7_seg/cls/utils/loggers/clearml/README.md
@@ -0,0 +1,222 @@
+# ClearML Integration
+
+
+
+## About ClearML
+
+[ClearML](https://cutt.ly/yolov5-tutorial-clearml) is an [open-source](https://github.com/allegroai/clearml) toolbox designed to save you time ⏱️.
+
+🔨 Track every YOLOv5 training run in the experiment manager
+
+🔧 Version and easily access your custom training data with the integrated ClearML Data Versioning Tool
+
+🔦 Remotely train and monitor your YOLOv5 training runs using ClearML Agent
+
+🔬 Get the very best mAP using ClearML Hyperparameter Optimization
+
+🔭 Turn your newly trained YOLOv5 model into an API with just a few commands using ClearML Serving
+
+
+And so much more. It's up to you how many of these tools you want to use, you can stick to the experiment manager, or chain them all together into an impressive pipeline!
+
+
+
+
+
+
+
+
+
+## 🦾 Setting Things Up
+
+To keep track of your experiments and/or data, ClearML needs to communicate to a server. You have 2 options to get one:
+
+Either sign up for free to the [ClearML Hosted Service](https://cutt.ly/yolov5-tutorial-clearml) or you can set up your own server, see [here](https://clear.ml/docs/latest/docs/deploying_clearml/clearml_server). Even the server is open-source, so even if you're dealing with sensitive data, you should be good to go!
+
+1. Install the `clearml` python package:
+
+ ```bash
+ pip install clearml
+ ```
+
+1. Connect the ClearML SDK to the server by [creating credentials](https://app.clear.ml/settings/workspace-configuration) (go right top to Settings -> Workspace -> Create new credentials), then execute the command below and follow the instructions:
+
+ ```bash
+ clearml-init
+ ```
+
+That's it! You're done 😎
+
+
+
+## 🚀 Training YOLOv5 With ClearML
+
+To enable ClearML experiment tracking, simply install the ClearML pip package.
+
+```bash
+pip install clearml
+```
+
+This will enable integration with the YOLOv5 training script. Every training run from now on, will be captured and stored by the ClearML experiment manager. If you want to change the `project_name` or `task_name`, head over to our custom logger, where you can change it: `utils/loggers/clearml/clearml_utils.py`
+
+```bash
+python train.py --img 640 --batch 16 --epochs 3 --data coco128.yaml --weights yolov5s.pt --cache
+```
+
+This will capture:
+- Source code + uncommitted changes
+- Installed packages
+- (Hyper)parameters
+- Model files (use `--save-period n` to save a checkpoint every n epochs)
+- Console output
+- Scalars (mAP_0.5, mAP_0.5:0.95, precision, recall, losses, learning rates, ...)
+- General info such as machine details, runtime, creation date etc.
+- All produced plots such as label correlogram and confusion matrix
+- Images with bounding boxes per epoch
+- Mosaic per epoch
+- Validation images per epoch
+- ...
+
+That's a lot right? 🤯
+Now, we can visualize all of this information in the ClearML UI to get an overview of our training progress. Add custom columns to the table view (such as e.g. mAP_0.5) so you can easily sort on the best performing model. Or select multiple experiments and directly compare them!
+
+There even more we can do with all of this information, like hyperparameter optimization and remote execution, so keep reading if you want to see how that works!
+
+
+
+## 🔗 Dataset Version Management
+
+Versioning your data separately from your code is generally a good idea and makes it easy to aqcuire the latest version too. This repository supports supplying a dataset version ID and it will make sure to get the data if it's not there yet. Next to that, this workflow also saves the used dataset ID as part of the task parameters, so you will always know for sure which data was used in which experiment!
+
+
+
+### Prepare Your Dataset
+
+The YOLOv5 repository supports a number of different datasets by using yaml files containing their information. By default datasets are downloaded to the `../datasets` folder in relation to the repository root folder. So if you downloaded the `coco128` dataset using the link in the yaml or with the scripts provided by yolov5, you get this folder structure:
+
+```
+..
+|_ yolov5
+|_ datasets
+ |_ coco128
+ |_ images
+ |_ labels
+ |_ LICENSE
+ |_ README.txt
+```
+But this can be any dataset you wish. Feel free to use your own, as long as you keep to this folder structure.
+
+Next, ⚠️**copy the corresponding yaml file to the root of the dataset folder**⚠️. This yaml files contains the information ClearML will need to properly use the dataset. You can make this yourself too, of course, just follow the structure of the example yamls.
+
+Basically we need the following keys: `path`, `train`, `test`, `val`, `nc`, `names`.
+
+```
+..
+|_ yolov5
+|_ datasets
+ |_ coco128
+ |_ images
+ |_ labels
+ |_ coco128.yaml # <---- HERE!
+ |_ LICENSE
+ |_ README.txt
+```
+
+### Upload Your Dataset
+
+To get this dataset into ClearML as a versionned dataset, go to the dataset root folder and run the following command:
+```bash
+cd coco128
+clearml-data sync --project YOLOv5 --name coco128 --folder .
+```
+
+The command `clearml-data sync` is actually a shorthand command. You could also run these commands one after the other:
+```bash
+# Optionally add --parent if you want to base
+# this version on another dataset version, so no duplicate files are uploaded!
+clearml-data create --name coco128 --project YOLOv5
+clearml-data add --files .
+clearml-data close
+```
+
+### Run Training Using A ClearML Dataset
+
+Now that you have a ClearML dataset, you can very simply use it to train custom YOLOv5 🚀 models!
+
+```bash
+python train.py --img 640 --batch 16 --epochs 3 --data clearml:// --weights yolov5s.pt --cache
+```
+
+
+
+## 👀 Hyperparameter Optimization
+
+Now that we have our experiments and data versioned, it's time to take a look at what we can build on top!
+
+Using the code information, installed packages and environment details, the experiment itself is now **completely reproducible**. In fact, ClearML allows you to clone an experiment and even change its parameters. We can then just rerun it with these new parameters automatically, this is basically what HPO does!
+
+To **run hyperparameter optimization locally**, we've included a pre-made script for you. Just make sure a training task has been run at least once, so it is in the ClearML experiment manager, we will essentially clone it and change its hyperparameters.
+
+You'll need to fill in the ID of this `template task` in the script found at `utils/loggers/clearml/hpo.py` and then just run it :) You can change `task.execute_locally()` to `task.execute()` to put it in a ClearML queue and have a remote agent work on it instead.
+
+```bash
+# To use optuna, install it first, otherwise you can change the optimizer to just be RandomSearch
+pip install optuna
+python utils/loggers/clearml/hpo.py
+```
+
+
+
+## 🤯 Remote Execution (advanced)
+
+Running HPO locally is really handy, but what if we want to run our experiments on a remote machine instead? Maybe you have access to a very powerful GPU machine on-site or you have some budget to use cloud GPUs.
+This is where the ClearML Agent comes into play. Check out what the agent can do here:
+
+- [Youtube video](https://youtu.be/MX3BrXnaULs)
+- [Documentation](https://clear.ml/docs/latest/docs/clearml_agent)
+
+In short: every experiment tracked by the experiment manager contains enough information to reproduce it on a different machine (installed packages, uncommitted changes etc.). So a ClearML agent does just that: it listens to a queue for incoming tasks and when it finds one, it recreates the environment and runs it while still reporting scalars, plots etc. to the experiment manager.
+
+You can turn any machine (a cloud VM, a local GPU machine, your own laptop ... ) into a ClearML agent by simply running:
+```bash
+clearml-agent daemon --queue [--docker]
+```
+
+### Cloning, Editing And Enqueuing
+
+With our agent running, we can give it some work. Remember from the HPO section that we can clone a task and edit the hyperparameters? We can do that from the interface too!
+
+🪄 Clone the experiment by right clicking it
+
+🎯 Edit the hyperparameters to what you wish them to be
+
+⏳ Enqueue the task to any of the queues by right clicking it
+
+
+
+### Executing A Task Remotely
+
+Now you can clone a task like we explained above, or simply mark your current script by adding `task.execute_remotely()` and on execution it will be put into a queue, for the agent to start working on!
+
+To run the YOLOv5 training script remotely, all you have to do is add this line to the training.py script after the clearml logger has been instatiated:
+```python
+# ...
+# Loggers
+data_dict = None
+if RANK in {-1, 0}:
+ loggers = Loggers(save_dir, weights, opt, hyp, LOGGER) # loggers instance
+ if loggers.clearml:
+ loggers.clearml.task.execute_remotely(queue='my_queue') # <------ ADD THIS LINE
+ # Data_dict is either None is user did not choose for ClearML dataset or is filled in by ClearML
+ data_dict = loggers.clearml.data_dict
+# ...
+```
+When running the training script after this change, python will run the script up until that line, after which it will package the code and send it to the queue instead!
+
+### Autoscaling workers
+
+ClearML comes with autoscalers too! This tool will automatically spin up new remote machines in the cloud of your choice (AWS, GCP, Azure) and turn them into ClearML agents for you whenever there are experiments detected in the queue. Once the tasks are processed, the autoscaler will automatically shut down the remote machines and you stop paying!
+
+Check out the autoscalers getting started video below.
+
+[](https://youtu.be/j4XVMAaUt3E)
diff --git a/yolov7_seg/cls/utils/loggers/clearml/__init__.py b/yolov7_seg/cls/utils/loggers/clearml/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/yolov7_seg/cls/utils/loggers/clearml/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/yolov7_seg/cls/utils/loggers/clearml/clearml_utils.py b/yolov7_seg/cls/utils/loggers/clearml/clearml_utils.py
new file mode 100644
index 000000000..469ffb0ba
--- /dev/null
+++ b/yolov7_seg/cls/utils/loggers/clearml/clearml_utils.py
@@ -0,0 +1,150 @@
+"""Main Logger class for ClearML experiment tracking."""
+import glob
+import re
+from pathlib import Path
+
+import yaml
+from torchvision.transforms import ToPILImage
+from torchvision.utils import draw_bounding_boxes
+
+try:
+ import clearml
+ from clearml import Dataset, Task
+
+ assert hasattr(clearml, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ clearml = None
+
+
+def construct_dataset(clearml_info_string):
+ dataset_id = clearml_info_string.replace('clearml://', '')
+ dataset = Dataset.get(dataset_id=dataset_id)
+ dataset_root_path = Path(dataset.get_local_copy())
+
+ # We'll search for the yaml file definition in the dataset
+ yaml_filenames = list(glob.glob(str(dataset_root_path / "*.yaml")) + glob.glob(str(dataset_root_path / "*.yml")))
+ if len(yaml_filenames) > 1:
+ raise ValueError('More than one yaml file was found in the dataset root, cannot determine which one contains '
+ 'the dataset definition this way.')
+ elif len(yaml_filenames) == 0:
+ raise ValueError('No yaml definition found in dataset root path, check that there is a correct yaml file '
+ 'inside the dataset root path.')
+ with open(yaml_filenames[0]) as f:
+ dataset_definition = yaml.safe_load(f)
+
+ assert set(dataset_definition.keys()).issuperset(
+ {'train', 'test', 'val', 'nc', 'names'}
+ ), "The right keys were not found in the yaml file, make sure it at least has the following keys: ('train', 'test', 'val', 'nc', 'names')"
+
+ data_dict = dict()
+ data_dict['train'] = str(
+ (dataset_root_path / dataset_definition['train']).resolve()) if dataset_definition['train'] else None
+ data_dict['test'] = str(
+ (dataset_root_path / dataset_definition['test']).resolve()) if dataset_definition['test'] else None
+ data_dict['val'] = str(
+ (dataset_root_path / dataset_definition['val']).resolve()) if dataset_definition['val'] else None
+ data_dict['nc'] = dataset_definition['nc']
+ data_dict['names'] = dataset_definition['names']
+
+ return data_dict
+
+
+class ClearmlLogger:
+ """Log training runs, datasets, models, and predictions to ClearML.
+
+ This logger sends information to ClearML at app.clear.ml or to your own hosted server. By default,
+ this information includes hyperparameters, system configuration and metrics, model metrics, code information and
+ basic data metrics and analyses.
+
+ By providing additional command line arguments to train.py, datasets,
+ models and predictions can also be logged.
+ """
+
+ def __init__(self, opt, hyp):
+ """
+ - Initialize ClearML Task, this object will capture the experiment
+ - Upload dataset version to ClearML Data if opt.upload_dataset is True
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ hyp (dict) -- Hyperparameters for this run
+
+ """
+ self.current_epoch = 0
+ # Keep tracked of amount of logged images to enforce a limit
+ self.current_epoch_logged_images = set()
+ # Maximum number of images to log to clearML per epoch
+ self.max_imgs_to_log_per_epoch = 16
+ # Get the interval of epochs when bounding box images should be logged
+ self.bbox_interval = opt.bbox_interval
+ self.clearml = clearml
+ self.task = None
+ self.data_dict = None
+ if self.clearml:
+ self.task = Task.init(
+ project_name='YOLOv5',
+ task_name='training',
+ tags=['YOLOv5'],
+ output_uri=True,
+ auto_connect_frameworks={'pytorch': False}
+ # We disconnect pytorch auto-detection, because we added manual model save points in the code
+ )
+ # ClearML's hooks will already grab all general parameters
+ # Only the hyperparameters coming from the yaml config file
+ # will have to be added manually!
+ self.task.connect(hyp, name='Hyperparameters')
+
+ # Get ClearML Dataset Version if requested
+ if opt.data.startswith('clearml://'):
+ # data_dict should have the following keys:
+ # names, nc (number of classes), test, train, val (all three relative paths to ../datasets)
+ self.data_dict = construct_dataset(opt.data)
+ # Set data to data_dict because wandb will crash without this information and opt is the best way
+ # to give it to them
+ opt.data = self.data_dict
+
+ def log_debug_samples(self, files, title='Debug Samples'):
+ """
+ Log files (images) as debug samples in the ClearML task.
+
+ arguments:
+ files (List(PosixPath)) a list of file paths in PosixPath format
+ title (str) A title that groups together images with the same values
+ """
+ for f in files:
+ if f.exists():
+ it = re.search(r'_batch(\d+)', f.name)
+ iteration = int(it.groups()[0]) if it else 0
+ self.task.get_logger().report_image(title=title,
+ series=f.name.replace(it.group(), ''),
+ local_path=str(f),
+ iteration=iteration)
+
+ def log_image_with_boxes(self, image_path, boxes, class_names, image):
+ """
+ Draw the bounding boxes on a single image and report the result as a ClearML debug sample
+
+ arguments:
+ image_path (PosixPath) the path the original image file
+ boxes (list): list of scaled predictions in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ class_names (dict): dict containing mapping of class int to class name
+ image (Tensor): A torch tensor containing the actual image data
+ """
+ if len(self.current_epoch_logged_images) < self.max_imgs_to_log_per_epoch and self.current_epoch >= 0:
+ # Log every bbox_interval times and deduplicate for any intermittend extra eval runs
+ if self.current_epoch % self.bbox_interval == 0 and image_path not in self.current_epoch_logged_images:
+ converter = ToPILImage()
+ labels = []
+ for conf, class_nr in zip(boxes[:, 4], boxes[:, 5]):
+ class_name = class_names[int(class_nr)]
+ confidence = round(float(conf) * 100, 2)
+ labels.append(f"{class_name}: {confidence}%")
+ annotated_image = converter(
+ draw_bounding_boxes(image=image.mul(255).clamp(0, 255).byte().cpu(),
+ boxes=boxes[:, :4],
+ labels=labels))
+ self.task.get_logger().report_image(title='Bounding Boxes',
+ series=image_path.name,
+ iteration=self.current_epoch,
+ image=annotated_image)
+ self.current_epoch_logged_images.add(image_path)
diff --git a/yolov7_seg/cls/utils/loggers/clearml/hpo.py b/yolov7_seg/cls/utils/loggers/clearml/hpo.py
new file mode 100644
index 000000000..bb3b36385
--- /dev/null
+++ b/yolov7_seg/cls/utils/loggers/clearml/hpo.py
@@ -0,0 +1,84 @@
+from clearml import Task
+# Connecting ClearML with the current process,
+# from here on everything is logged automatically
+from clearml.automation import HyperParameterOptimizer, UniformParameterRange
+from clearml.automation.optuna import OptimizerOptuna
+
+task = Task.init(project_name='Hyper-Parameter Optimization',
+ task_name='YOLOv5',
+ task_type=Task.TaskTypes.optimizer,
+ reuse_last_task_id=False)
+
+# Example use case:
+optimizer = HyperParameterOptimizer(
+ # This is the experiment we want to optimize
+ base_task_id='',
+ # here we define the hyper-parameters to optimize
+ # Notice: The parameter name should exactly match what you see in the UI: /
+ # For Example, here we see in the base experiment a section Named: "General"
+ # under it a parameter named "batch_size", this becomes "General/batch_size"
+ # If you have `argparse` for example, then arguments will appear under the "Args" section,
+ # and you should instead pass "Args/batch_size"
+ hyper_parameters=[
+ UniformParameterRange('Hyperparameters/lr0', min_value=1e-5, max_value=1e-1),
+ UniformParameterRange('Hyperparameters/lrf', min_value=0.01, max_value=1.0),
+ UniformParameterRange('Hyperparameters/momentum', min_value=0.6, max_value=0.98),
+ UniformParameterRange('Hyperparameters/weight_decay', min_value=0.0, max_value=0.001),
+ UniformParameterRange('Hyperparameters/warmup_epochs', min_value=0.0, max_value=5.0),
+ UniformParameterRange('Hyperparameters/warmup_momentum', min_value=0.0, max_value=0.95),
+ UniformParameterRange('Hyperparameters/warmup_bias_lr', min_value=0.0, max_value=0.2),
+ UniformParameterRange('Hyperparameters/box', min_value=0.02, max_value=0.2),
+ UniformParameterRange('Hyperparameters/cls', min_value=0.2, max_value=4.0),
+ UniformParameterRange('Hyperparameters/cls_pw', min_value=0.5, max_value=2.0),
+ UniformParameterRange('Hyperparameters/obj', min_value=0.2, max_value=4.0),
+ UniformParameterRange('Hyperparameters/obj_pw', min_value=0.5, max_value=2.0),
+ UniformParameterRange('Hyperparameters/iou_t', min_value=0.1, max_value=0.7),
+ UniformParameterRange('Hyperparameters/anchor_t', min_value=2.0, max_value=8.0),
+ UniformParameterRange('Hyperparameters/fl_gamma', min_value=0.0, max_value=4.0),
+ UniformParameterRange('Hyperparameters/hsv_h', min_value=0.0, max_value=0.1),
+ UniformParameterRange('Hyperparameters/hsv_s', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/hsv_v', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/degrees', min_value=0.0, max_value=45.0),
+ UniformParameterRange('Hyperparameters/translate', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/scale', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/shear', min_value=0.0, max_value=10.0),
+ UniformParameterRange('Hyperparameters/perspective', min_value=0.0, max_value=0.001),
+ UniformParameterRange('Hyperparameters/flipud', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/fliplr', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/mosaic', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/mixup', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/copy_paste', min_value=0.0, max_value=1.0)],
+ # this is the objective metric we want to maximize/minimize
+ objective_metric_title='metrics',
+ objective_metric_series='mAP_0.5',
+ # now we decide if we want to maximize it or minimize it (accuracy we maximize)
+ objective_metric_sign='max',
+ # let us limit the number of concurrent experiments,
+ # this in turn will make sure we do dont bombard the scheduler with experiments.
+ # if we have an auto-scaler connected, this, by proxy, will limit the number of machine
+ max_number_of_concurrent_tasks=1,
+ # this is the optimizer class (actually doing the optimization)
+ # Currently, we can choose from GridSearch, RandomSearch or OptimizerBOHB (Bayesian optimization Hyper-Band)
+ optimizer_class=OptimizerOptuna,
+ # If specified only the top K performing Tasks will be kept, the others will be automatically archived
+ save_top_k_tasks_only=5, # 5,
+ compute_time_limit=None,
+ total_max_jobs=20,
+ min_iteration_per_job=None,
+ max_iteration_per_job=None,
+)
+
+# report every 10 seconds, this is way too often, but we are testing here
+optimizer.set_report_period(10)
+# You can also use the line below instead to run all the optimizer tasks locally, without using queues or agent
+# an_optimizer.start_locally(job_complete_callback=job_complete_callback)
+# set the time limit for the optimization process (2 hours)
+optimizer.set_time_limit(in_minutes=120.0)
+# Start the optimization process in the local environment
+optimizer.start_locally()
+# wait until process is done (notice we are controlling the optimization process in the background)
+optimizer.wait()
+# make sure background optimization stopped
+optimizer.stop()
+
+print('We are done, good bye')
diff --git a/yolov7_seg/cls/utils/loggers/wandb/README.md b/yolov7_seg/cls/utils/loggers/wandb/README.md
new file mode 100644
index 000000000..d37b7226b
--- /dev/null
+++ b/yolov7_seg/cls/utils/loggers/wandb/README.md
@@ -0,0 +1,162 @@
+📚 This guide explains how to use **Weights & Biases** (W&B) with YOLOv5 🚀. UPDATED 29 September 2021.
+
+- [About Weights & Biases](#about-weights-&-biases)
+- [First-Time Setup](#first-time-setup)
+- [Viewing runs](#viewing-runs)
+- [Disabling wandb](#disabling-wandb)
+- [Advanced Usage: Dataset Versioning and Evaluation](#advanced-usage)
+- [Reports: Share your work with the world!](#reports)
+
+## About Weights & Biases
+
+Think of [W&B](https://wandb.ai/site?utm_campaign=repo_yolo_wandbtutorial) like GitHub for machine learning models. With a few lines of code, save everything you need to debug, compare and reproduce your models — architecture, hyperparameters, git commits, model weights, GPU usage, and even datasets and predictions.
+
+Used by top researchers including teams at OpenAI, Lyft, Github, and MILA, W&B is part of the new standard of best practices for machine learning. How W&B can help you optimize your machine learning workflows:
+
+- [Debug](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Free-2) model performance in real time
+- [GPU usage](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#System-4) visualized automatically
+- [Custom charts](https://wandb.ai/wandb/customizable-charts/reports/Powerful-Custom-Charts-To-Debug-Model-Peformance--VmlldzoyNzY4ODI) for powerful, extensible visualization
+- [Share insights](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Share-8) interactively with collaborators
+- [Optimize hyperparameters](https://docs.wandb.com/sweeps) efficiently
+- [Track](https://docs.wandb.com/artifacts) datasets, pipelines, and production models
+
+## First-Time Setup
+
+
+ Toggle Details
+When you first train, W&B will prompt you to create a new account and will generate an **API key** for you. If you are an existing user you can retrieve your key from https://wandb.ai/authorize. This key is used to tell W&B where to log your data. You only need to supply your key once, and then it is remembered on the same device.
+
+W&B will create a cloud **project** (default is 'YOLOv5') for your training runs, and each new training run will be provided a unique run **name** within that project as project/name. You can also manually set your project and run name as:
+
+```shell
+$ python train.py --project ... --name ...
+```
+
+YOLOv5 notebook example:
+
+
+
+
+## Viewing Runs
+
+
+ Toggle Details
+Run information streams from your environment to the W&B cloud console as you train. This allows you to monitor and even cancel runs in realtime . All important information is logged:
+
+- Training & Validation losses
+- Metrics: Precision, Recall, mAP@0.5, mAP@0.5:0.95
+- Learning Rate over time
+- A bounding box debugging panel, showing the training progress over time
+- GPU: Type, **GPU Utilization**, power, temperature, **CUDA memory usage**
+- System: Disk I/0, CPU utilization, RAM memory usage
+- Your trained model as W&B Artifact
+- Environment: OS and Python types, Git repository and state, **training command**
+
+
+
+
+## Disabling wandb
+
+- training after running `wandb disabled` inside that directory creates no wandb run
+ 
+
+- To enable wandb again, run `wandb online`
+ 
+
+## Advanced Usage
+
+You can leverage W&B artifacts and Tables integration to easily visualize and manage your datasets, models and training evaluations. Here are some quick examples to get you started.
+
+
+ 1: Train and Log Evaluation simultaneousy
+ This is an extension of the previous section, but it'll also training after uploading the dataset. This also evaluation Table
+ Evaluation table compares your predictions and ground truths across the validation set for each epoch. It uses the references to the already uploaded datasets,
+ so no images will be uploaded from your system more than once.
+
+ Usage
+ Code $ python train.py --upload_data val
+
+
+
+
+
+2. Visualize and Version Datasets
+ Log, visualize, dynamically query, and understand your data with W&B Tables. You can use the following command to log your dataset as a W&B Table. This will generate a {dataset}_wandb.yaml file which can be used to train from dataset artifact.
+
+ Usage
+ Code $ python utils/logger/wandb/log_dataset.py --project ... --name ... --data ..
+
+
+
+
+
+ 3: Train using dataset artifact
+ When you upload a dataset as described in the first section, you get a new config file with an added `_wandb` to its name. This file contains the information that
+ can be used to train a model directly from the dataset artifact. This also logs evaluation
+
+ Usage
+ Code $ python train.py --data {data}_wandb.yaml
+
+
+
+
+
+ 4: Save model checkpoints as artifacts
+ To enable saving and versioning checkpoints of your experiment, pass `--save_period n` with the base cammand, where `n` represents checkpoint interval.
+ You can also log both the dataset and model checkpoints simultaneously. If not passed, only the final model will be logged
+
+
+ Usage
+ Code $ python train.py --save_period 1
+
+
+
+
+
+
+
+ 5: Resume runs from checkpoint artifacts.
+Any run can be resumed using artifacts if the --resume argument starts with wandb-artifact:// prefix followed by the run path, i.e, wandb-artifact://username/project/runid . This doesn't require the model checkpoint to be present on the local system.
+
+
+ Usage
+ Code $ python train.py --resume wandb-artifact://{run_path}
+
+
+
+
+
+ 6: Resume runs from dataset artifact & checkpoint artifacts.
+ Local dataset or model checkpoints are not required. This can be used to resume runs directly on a different device
+ The syntax is same as the previous section, but you'll need to lof both the dataset and model checkpoints as artifacts, i.e, set bot --upload_dataset or
+ train from _wandb.yaml file and set --save_period
+
+
+ Usage
+ Code $ python train.py --resume wandb-artifact://{run_path}
+
+
+
+
+
+
+
+ Reports
+W&B Reports can be created from your saved runs for sharing online. Once a report is created you will receive a link you can use to publically share your results. Here is an example report created from the COCO128 tutorial trainings of all four YOLOv5 models ([link](https://wandb.ai/glenn-jocher/yolov5_tutorial/reports/YOLOv5-COCO128-Tutorial-Results--VmlldzozMDI5OTY)).
+
+
+
+## Environments
+
+YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):
+
+- **Google Colab and Kaggle** notebooks with free GPU:
+- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
+- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
+- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
+
+## Status
+
+
+
+If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.
diff --git a/yolov7_seg/cls/utils/loggers/wandb/__init__.py b/yolov7_seg/cls/utils/loggers/wandb/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/yolov7_seg/cls/utils/loggers/wandb/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/yolov7_seg/cls/utils/loggers/wandb/log_dataset.py b/yolov7_seg/cls/utils/loggers/wandb/log_dataset.py
new file mode 100644
index 000000000..072969c75
--- /dev/null
+++ b/yolov7_seg/cls/utils/loggers/wandb/log_dataset.py
@@ -0,0 +1,27 @@
+import argparse
+
+from wandb_utils import WandbLogger
+
+from utils.general import LOGGER
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ logger = WandbLogger(opt, None, job_type='Dataset Creation') # TODO: return value unused
+ if not logger.wandb:
+ LOGGER.info("install wandb using `pip install wandb` to log the dataset")
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOv5', help='name of W&B Project')
+ parser.add_argument('--entity', default=None, help='W&B entity')
+ parser.add_argument('--name', type=str, default='log dataset', help='name of W&B run')
+
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/yolov7_seg/cls/utils/loggers/wandb/sweep.py b/yolov7_seg/cls/utils/loggers/wandb/sweep.py
new file mode 100644
index 000000000..735c96886
--- /dev/null
+++ b/yolov7_seg/cls/utils/loggers/wandb/sweep.py
@@ -0,0 +1,41 @@
+import sys
+from pathlib import Path
+
+import wandb
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from train import parse_opt, train
+from utils.callbacks import Callbacks
+from utils.general import increment_path
+from utils.torch_utils import select_device
+
+
+def sweep():
+ wandb.init()
+ # Get hyp dict from sweep agent. Copy because train() modifies parameters which confused wandb.
+ hyp_dict = vars(wandb.config).get("_items").copy()
+
+ # Workaround: get necessary opt args
+ opt = parse_opt(known=True)
+ opt.batch_size = hyp_dict.get("batch_size")
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
+ opt.epochs = hyp_dict.get("epochs")
+ opt.nosave = True
+ opt.data = hyp_dict.get("data")
+ opt.weights = str(opt.weights)
+ opt.cfg = str(opt.cfg)
+ opt.data = str(opt.data)
+ opt.hyp = str(opt.hyp)
+ opt.project = str(opt.project)
+ device = select_device(opt.device, batch_size=opt.batch_size)
+
+ # train
+ train(hyp_dict, opt, device, callbacks=Callbacks())
+
+
+if __name__ == "__main__":
+ sweep()
diff --git a/yolov7_seg/cls/utils/loggers/wandb/sweep.yaml b/yolov7_seg/cls/utils/loggers/wandb/sweep.yaml
new file mode 100644
index 000000000..044fca319
--- /dev/null
+++ b/yolov7_seg/cls/utils/loggers/wandb/sweep.yaml
@@ -0,0 +1,143 @@
+# Hyperparameters for training
+# To set range-
+# Provide min and max values as:
+# parameter:
+#
+# min: scalar
+# max: scalar
+# OR
+#
+# Set a specific list of search space-
+# parameter:
+# values: [scalar1, scalar2, scalar3...]
+#
+# You can use grid, bayesian and hyperopt search strategy
+# For more info on configuring sweeps visit - https://docs.wandb.ai/guides/sweeps/configuration
+
+program: utils/loggers/wandb/sweep.py
+method: random
+metric:
+ name: metrics/mAP_0.5
+ goal: maximize
+
+parameters:
+ # hyperparameters: set either min, max range or values list
+ data:
+ value: "data/coco128.yaml"
+ batch_size:
+ values: [64]
+ epochs:
+ values: [10]
+
+ lr0:
+ distribution: uniform
+ min: 1e-5
+ max: 1e-1
+ lrf:
+ distribution: uniform
+ min: 0.01
+ max: 1.0
+ momentum:
+ distribution: uniform
+ min: 0.6
+ max: 0.98
+ weight_decay:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ warmup_epochs:
+ distribution: uniform
+ min: 0.0
+ max: 5.0
+ warmup_momentum:
+ distribution: uniform
+ min: 0.0
+ max: 0.95
+ warmup_bias_lr:
+ distribution: uniform
+ min: 0.0
+ max: 0.2
+ box:
+ distribution: uniform
+ min: 0.02
+ max: 0.2
+ cls:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ cls_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ obj:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ obj_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ iou_t:
+ distribution: uniform
+ min: 0.1
+ max: 0.7
+ anchor_t:
+ distribution: uniform
+ min: 2.0
+ max: 8.0
+ fl_gamma:
+ distribution: uniform
+ min: 0.0
+ max: 4.0
+ hsv_h:
+ distribution: uniform
+ min: 0.0
+ max: 0.1
+ hsv_s:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ hsv_v:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ degrees:
+ distribution: uniform
+ min: 0.0
+ max: 45.0
+ translate:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ scale:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ shear:
+ distribution: uniform
+ min: 0.0
+ max: 10.0
+ perspective:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ flipud:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ fliplr:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mosaic:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mixup:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ copy_paste:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
diff --git a/yolov7_seg/cls/utils/loggers/wandb/wandb_utils.py b/yolov7_seg/cls/utils/loggers/wandb/wandb_utils.py
new file mode 100644
index 000000000..62dd457a6
--- /dev/null
+++ b/yolov7_seg/cls/utils/loggers/wandb/wandb_utils.py
@@ -0,0 +1,584 @@
+"""Utilities and tools for tracking runs with Weights & Biases."""
+
+import logging
+import os
+import sys
+from contextlib import contextmanager
+from pathlib import Path
+from typing import Dict
+
+import yaml
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from utils.dataloaders import LoadImagesAndLabels, img2label_paths
+from utils.general import LOGGER, check_dataset, check_file
+
+try:
+ import wandb
+
+ assert hasattr(wandb, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ wandb = None
+
+RANK = int(os.getenv('RANK', -1))
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):
+ return from_string[len(prefix):]
+
+
+def check_wandb_config_file(data_config_file):
+ wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path
+ if Path(wandb_config).is_file():
+ return wandb_config
+ return data_config_file
+
+
+def check_wandb_dataset(data_file):
+ is_trainset_wandb_artifact = False
+ is_valset_wandb_artifact = False
+ if isinstance(data_file, dict):
+ # In that case another dataset manager has already processed it and we don't have to
+ return data_file
+ if check_file(data_file) and data_file.endswith('.yaml'):
+ with open(data_file, errors='ignore') as f:
+ data_dict = yaml.safe_load(f)
+ is_trainset_wandb_artifact = isinstance(data_dict['train'],
+ str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX)
+ is_valset_wandb_artifact = isinstance(data_dict['val'],
+ str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX)
+ if is_trainset_wandb_artifact or is_valset_wandb_artifact:
+ return data_dict
+ else:
+ return check_dataset(data_file)
+
+
+def get_run_info(run_path):
+ run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))
+ run_id = run_path.stem
+ project = run_path.parent.stem
+ entity = run_path.parent.parent.stem
+ model_artifact_name = 'run_' + run_id + '_model'
+ return entity, project, run_id, model_artifact_name
+
+
+def check_wandb_resume(opt):
+ process_wandb_config_ddp_mode(opt) if RANK not in [-1, 0] else None
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ if RANK not in [-1, 0]: # For resuming DDP runs
+ entity, project, run_id, model_artifact_name = get_run_info(opt.resume)
+ api = wandb.Api()
+ artifact = api.artifact(entity + '/' + project + '/' + model_artifact_name + ':latest')
+ modeldir = artifact.download()
+ opt.weights = str(Path(modeldir) / "last.pt")
+ return True
+ return None
+
+
+def process_wandb_config_ddp_mode(opt):
+ with open(check_file(opt.data), errors='ignore') as f:
+ data_dict = yaml.safe_load(f) # data dict
+ train_dir, val_dir = None, None
+ if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)
+ train_dir = train_artifact.download()
+ train_path = Path(train_dir) / 'data/images/'
+ data_dict['train'] = str(train_path)
+
+ if isinstance(data_dict['val'], str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ val_artifact = api.artifact(remove_prefix(data_dict['val']) + ':' + opt.artifact_alias)
+ val_dir = val_artifact.download()
+ val_path = Path(val_dir) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ if train_dir or val_dir:
+ ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')
+ with open(ddp_data_path, 'w') as f:
+ yaml.safe_dump(data_dict, f)
+ opt.data = ddp_data_path
+
+
+class WandbLogger():
+ """Log training runs, datasets, models, and predictions to Weights & Biases.
+
+ This logger sends information to W&B at wandb.ai. By default, this information
+ includes hyperparameters, system configuration and metrics, model metrics,
+ and basic data metrics and analyses.
+
+ By providing additional command line arguments to train.py, datasets,
+ models and predictions can also be logged.
+
+ For more on how this logger is used, see the Weights & Biases documentation:
+ https://docs.wandb.com/guides/integrations/yolov5
+ """
+
+ def __init__(self, opt, run_id=None, job_type='Training'):
+ """
+ - Initialize WandbLogger instance
+ - Upload dataset if opt.upload_dataset is True
+ - Setup training processes if job_type is 'Training'
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ run_id (str) -- Run ID of W&B run to be resumed
+ job_type (str) -- To set the job_type for this run
+
+ """
+ # Pre-training routine --
+ self.job_type = job_type
+ self.wandb, self.wandb_run = wandb, None if not wandb else wandb.run
+ self.val_artifact, self.train_artifact = None, None
+ self.train_artifact_path, self.val_artifact_path = None, None
+ self.result_artifact = None
+ self.val_table, self.result_table = None, None
+ self.bbox_media_panel_images = []
+ self.val_table_path_map = None
+ self.max_imgs_to_log = 16
+ self.wandb_artifact_data_dict = None
+ self.data_dict = None
+ # It's more elegant to stick to 1 wandb.init call,
+ # but useful config data is overwritten in the WandbLogger's wandb.init call
+ if isinstance(opt.resume, str): # checks resume from artifact
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ entity, project, run_id, model_artifact_name = get_run_info(opt.resume)
+ model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name
+ assert wandb, 'install wandb to resume wandb runs'
+ # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config
+ self.wandb_run = wandb.init(id=run_id,
+ project=project,
+ entity=entity,
+ resume='allow',
+ allow_val_change=True)
+ opt.resume = model_artifact_name
+ elif self.wandb:
+ self.wandb_run = wandb.init(config=opt,
+ resume="allow",
+ project='YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem,
+ entity=opt.entity,
+ name=opt.name if opt.name != 'exp' else None,
+ job_type=job_type,
+ id=run_id,
+ allow_val_change=True) if not wandb.run else wandb.run
+ if self.wandb_run:
+ if self.job_type == 'Training':
+ if opt.upload_dataset:
+ if not opt.resume:
+ self.wandb_artifact_data_dict = self.check_and_upload_dataset(opt)
+
+ if isinstance(opt.data, dict):
+ # This means another dataset manager has already processed the dataset info (e.g. ClearML)
+ # and they will have stored the already processed dict in opt.data
+ self.data_dict = opt.data
+ elif opt.resume:
+ # resume from artifact
+ if isinstance(opt.resume, str) and opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ self.data_dict = dict(self.wandb_run.config.data_dict)
+ else: # local resume
+ self.data_dict = check_wandb_dataset(opt.data)
+ else:
+ self.data_dict = check_wandb_dataset(opt.data)
+ self.wandb_artifact_data_dict = self.wandb_artifact_data_dict or self.data_dict
+
+ # write data_dict to config. useful for resuming from artifacts. Do this only when not resuming.
+ self.wandb_run.config.update({'data_dict': self.wandb_artifact_data_dict}, allow_val_change=True)
+ self.setup_training(opt)
+
+ if self.job_type == 'Dataset Creation':
+ self.wandb_run.config.update({"upload_dataset": True})
+ self.data_dict = self.check_and_upload_dataset(opt)
+
+ def check_and_upload_dataset(self, opt):
+ """
+ Check if the dataset format is compatible and upload it as W&B artifact
+
+ arguments:
+ opt (namespace)-- Commandline arguments for current run
+
+ returns:
+ Updated dataset info dictionary where local dataset paths are replaced by WAND_ARFACT_PREFIX links.
+ """
+ assert wandb, 'Install wandb to upload dataset'
+ config_path = self.log_dataset_artifact(opt.data, opt.single_cls,
+ 'YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem)
+ with open(config_path, errors='ignore') as f:
+ wandb_data_dict = yaml.safe_load(f)
+ return wandb_data_dict
+
+ def setup_training(self, opt):
+ """
+ Setup the necessary processes for training YOLO models:
+ - Attempt to download model checkpoint and dataset artifacts if opt.resume stats with WANDB_ARTIFACT_PREFIX
+ - Update data_dict, to contain info of previous run if resumed and the paths of dataset artifact if downloaded
+ - Setup log_dict, initialize bbox_interval
+
+ arguments:
+ opt (namespace) -- commandline arguments for this run
+
+ """
+ self.log_dict, self.current_epoch = {}, 0
+ self.bbox_interval = opt.bbox_interval
+ if isinstance(opt.resume, str):
+ modeldir, _ = self.download_model_artifact(opt)
+ if modeldir:
+ self.weights = Path(modeldir) / "last.pt"
+ config = self.wandb_run.config
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp, opt.imgsz = str(
+ self.weights), config.save_period, config.batch_size, config.bbox_interval, config.epochs,\
+ config.hyp, config.imgsz
+ data_dict = self.data_dict
+ if self.val_artifact is None: # If --upload_dataset is set, use the existing artifact, don't download
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(
+ data_dict.get('train'), opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(
+ data_dict.get('val'), opt.artifact_alias)
+
+ if self.train_artifact_path is not None:
+ train_path = Path(self.train_artifact_path) / 'data/images/'
+ data_dict['train'] = str(train_path)
+ if self.val_artifact_path is not None:
+ val_path = Path(self.val_artifact_path) / 'data/images/'
+ data_dict['val'] = str(val_path)
+
+ if self.val_artifact is not None:
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+ columns = ["epoch", "id", "ground truth", "prediction"]
+ columns.extend(self.data_dict['names'])
+ self.result_table = wandb.Table(columns)
+ self.val_table = self.val_artifact.get("val")
+ if self.val_table_path_map is None:
+ self.map_val_table_path()
+ if opt.bbox_interval == -1:
+ self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ if opt.evolve or opt.noplots:
+ self.bbox_interval = opt.bbox_interval = opt.epochs + 1 # disable bbox_interval
+ train_from_artifact = self.train_artifact_path is not None and self.val_artifact_path is not None
+ # Update the the data_dict to point to local artifacts dir
+ if train_from_artifact:
+ self.data_dict = data_dict
+
+ def download_dataset_artifact(self, path, alias):
+ """
+ download the model checkpoint artifact if the path starts with WANDB_ARTIFACT_PREFIX
+
+ arguments:
+ path -- path of the dataset to be used for training
+ alias (str)-- alias of the artifact to be download/used for training
+
+ returns:
+ (str, wandb.Artifact) -- path of the downladed dataset and it's corresponding artifact object if dataset
+ is found otherwise returns (None, None)
+ """
+ if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):
+ artifact_path = Path(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + ":" + alias)
+ dataset_artifact = wandb.use_artifact(artifact_path.as_posix().replace("\\", "/"))
+ assert dataset_artifact is not None, "'Error: W&B dataset artifact doesn\'t exist'"
+ datadir = dataset_artifact.download()
+ return datadir, dataset_artifact
+ return None, None
+
+ def download_model_artifact(self, opt):
+ """
+ download the model checkpoint artifact if the resume path starts with WANDB_ARTIFACT_PREFIX
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ """
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
+ assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
+ modeldir = model_artifact.download()
+ # epochs_trained = model_artifact.metadata.get('epochs_trained')
+ total_epochs = model_artifact.metadata.get('total_epochs')
+ is_finished = total_epochs is None
+ assert not is_finished, 'training is finished, can only resume incomplete runs.'
+ return modeldir, model_artifact
+ return None, None
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ """
+ Log the model checkpoint as W&B artifact
+
+ arguments:
+ path (Path) -- Path of directory containing the checkpoints
+ opt (namespace) -- Command line arguments for this run
+ epoch (int) -- Current epoch number
+ fitness_score (float) -- fitness score for current epoch
+ best_model (boolean) -- Boolean representing if the current checkpoint is the best yet.
+ """
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model',
+ type='model',
+ metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score})
+ model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
+ wandb.log_artifact(model_artifact,
+ aliases=['latest', 'last', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
+ LOGGER.info(f"Saving model artifact on epoch {epoch + 1}")
+
+ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):
+ """
+ Log the dataset as W&B artifact and return the new data file with W&B links
+
+ arguments:
+ data_file (str) -- the .yaml file with information about the dataset like - path, classes etc.
+ single_class (boolean) -- train multi-class data as single-class
+ project (str) -- project name. Used to construct the artifact path
+ overwrite_config (boolean) -- overwrites the data.yaml file if set to true otherwise creates a new
+ file with _wandb postfix. Eg -> data_wandb.yaml
+
+ returns:
+ the new .yaml file with artifact links. it can be used to start training directly from artifacts
+ """
+ upload_dataset = self.wandb_run.config.upload_dataset
+ log_val_only = isinstance(upload_dataset, str) and upload_dataset == 'val'
+ self.data_dict = check_dataset(data_file) # parse and check
+ data = dict(self.data_dict)
+ nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])
+ names = {k: v for k, v in enumerate(names)} # to index dictionary
+
+ # log train set
+ if not log_val_only:
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(data['train'], rect=True, batch_size=1),
+ names,
+ name='train') if data.get('train') else None
+ if data.get('train'):
+ data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
+
+ self.val_artifact = self.create_dataset_table(
+ LoadImagesAndLabels(data['val'], rect=True, batch_size=1), names, name='val') if data.get('val') else None
+ if data.get('val'):
+ data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
+
+ path = Path(data_file)
+ # create a _wandb.yaml file with artifacts links if both train and test set are logged
+ if not log_val_only:
+ path = (path.stem if overwrite_config else path.stem + '_wandb') + '.yaml' # updated data.yaml path
+ path = ROOT / 'data' / path
+ data.pop('download', None)
+ data.pop('path', None)
+ with open(path, 'w') as f:
+ yaml.safe_dump(data, f)
+ LOGGER.info(f"Created dataset config file {path}")
+
+ if self.job_type == 'Training': # builds correct artifact pipeline graph
+ if not log_val_only:
+ self.wandb_run.log_artifact(
+ self.train_artifact) # calling use_artifact downloads the dataset. NOT NEEDED!
+ self.wandb_run.use_artifact(self.val_artifact)
+ self.val_artifact.wait()
+ self.val_table = self.val_artifact.get('val')
+ self.map_val_table_path()
+ else:
+ self.wandb_run.log_artifact(self.train_artifact)
+ self.wandb_run.log_artifact(self.val_artifact)
+ return path
+
+ def map_val_table_path(self):
+ """
+ Map the validation dataset Table like name of file -> it's id in the W&B Table.
+ Useful for - referencing artifacts for evaluation.
+ """
+ self.val_table_path_map = {}
+ LOGGER.info("Mapping dataset")
+ for i, data in enumerate(tqdm(self.val_table.data)):
+ self.val_table_path_map[data[3]] = data[0]
+
+ def create_dataset_table(self, dataset: LoadImagesAndLabels, class_to_id: Dict[int, str], name: str = 'dataset'):
+ """
+ Create and return W&B artifact containing W&B Table of the dataset.
+
+ arguments:
+ dataset -- instance of LoadImagesAndLabels class used to iterate over the data to build Table
+ class_to_id -- hash map that maps class ids to labels
+ name -- name of the artifact
+
+ returns:
+ dataset artifact to be logged or used
+ """
+ # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
+ artifact = wandb.Artifact(name=name, type="dataset")
+ img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
+ img_files = tqdm(dataset.im_files) if not img_files else img_files
+ for img_file in img_files:
+ if Path(img_file).is_dir():
+ artifact.add_dir(img_file, name='data/images')
+ labels_path = 'labels'.join(dataset.path.rsplit('images', 1))
+ artifact.add_dir(labels_path, name='data/labels')
+ else:
+ artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
+ label_file = Path(img2label_paths([img_file])[0])
+ artifact.add_file(str(label_file), name='data/labels/' +
+ label_file.name) if label_file.exists() else None
+ table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
+ for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
+ box_data, img_classes = [], {}
+ for cls, *xywh in labels[:, 1:].tolist():
+ cls = int(cls)
+ box_data.append({
+ "position": {
+ "middle": [xywh[0], xywh[1]],
+ "width": xywh[2],
+ "height": xywh[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls])})
+ img_classes[cls] = class_to_id[cls]
+ boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
+ table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), list(img_classes.values()),
+ Path(paths).name)
+ artifact.add(table, name)
+ return artifact
+
+ def log_training_progress(self, predn, path, names):
+ """
+ Build evaluation Table. Uses reference from validation dataset table.
+
+ arguments:
+ predn (list): list of predictions in the native space in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ path (str): local path of the current evaluation image
+ names (dict(int, str)): hash map that maps class ids to labels
+ """
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])
+ box_data = []
+ avg_conf_per_class = [0] * len(self.data_dict['names'])
+ pred_class_count = {}
+ for *xyxy, conf, cls in predn.tolist():
+ if conf >= 0.25:
+ cls = int(cls)
+ box_data.append({
+ "position": {
+ "minX": xyxy[0],
+ "minY": xyxy[1],
+ "maxX": xyxy[2],
+ "maxY": xyxy[3]},
+ "class_id": cls,
+ "box_caption": f"{names[cls]} {conf:.3f}",
+ "scores": {
+ "class_score": conf},
+ "domain": "pixel"})
+ avg_conf_per_class[cls] += conf
+
+ if cls in pred_class_count:
+ pred_class_count[cls] += 1
+ else:
+ pred_class_count[cls] = 1
+
+ for pred_class in pred_class_count.keys():
+ avg_conf_per_class[pred_class] = avg_conf_per_class[pred_class] / pred_class_count[pred_class]
+
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ id = self.val_table_path_map[Path(path).name]
+ self.result_table.add_data(self.current_epoch, id, self.val_table.data[id][1],
+ wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
+ *avg_conf_per_class)
+
+ def val_one_image(self, pred, predn, path, names, im):
+ """
+ Log validation data for one image. updates the result Table if validation dataset is uploaded and log bbox media panel
+
+ arguments:
+ pred (list): list of scaled predictions in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ predn (list): list of predictions in the native space - [xmin, ymin, xmax, ymax, confidence, class]
+ path (str): local path of the current evaluation image
+ """
+ if self.val_table and self.result_table: # Log Table if Val dataset is uploaded as artifact
+ self.log_training_progress(predn, path, names)
+
+ if len(self.bbox_media_panel_images) < self.max_imgs_to_log and self.current_epoch > 0:
+ if self.current_epoch % self.bbox_interval == 0:
+ box_data = [{
+ "position": {
+ "minX": xyxy[0],
+ "minY": xyxy[1],
+ "maxX": xyxy[2],
+ "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": f"{names[int(cls)]} {conf:.3f}",
+ "scores": {
+ "class_score": conf},
+ "domain": "pixel"} for *xyxy, conf, cls in pred.tolist()]
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ self.bbox_media_panel_images.append(wandb.Image(im, boxes=boxes, caption=path.name))
+
+ def log(self, log_dict):
+ """
+ save the metrics to the logging dictionary
+
+ arguments:
+ log_dict (Dict) -- metrics/media to be logged in current step
+ """
+ if self.wandb_run:
+ for key, value in log_dict.items():
+ self.log_dict[key] = value
+
+ def end_epoch(self, best_result=False):
+ """
+ commit the log_dict, model artifacts and Tables to W&B and flush the log_dict.
+
+ arguments:
+ best_result (boolean): Boolean representing if the result of this evaluation is best or not
+ """
+ if self.wandb_run:
+ with all_logging_disabled():
+ if self.bbox_media_panel_images:
+ self.log_dict["BoundingBoxDebugger"] = self.bbox_media_panel_images
+ try:
+ wandb.log(self.log_dict)
+ except BaseException as e:
+ LOGGER.info(
+ f"An error occurred in wandb logger. The training will proceed without interruption. More info\n{e}"
+ )
+ self.wandb_run.finish()
+ self.wandb_run = None
+
+ self.log_dict = {}
+ self.bbox_media_panel_images = []
+ if self.result_artifact:
+ self.result_artifact.add(self.result_table, 'result')
+ wandb.log_artifact(self.result_artifact,
+ aliases=[
+ 'latest', 'last', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
+
+ wandb.log({"evaluation": self.result_table})
+ columns = ["epoch", "id", "ground truth", "prediction"]
+ columns.extend(self.data_dict['names'])
+ self.result_table = wandb.Table(columns)
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+
+ def finish_run(self):
+ """
+ Log metrics if any and finish the current W&B run
+ """
+ if self.wandb_run:
+ if self.log_dict:
+ with all_logging_disabled():
+ wandb.log(self.log_dict)
+ wandb.run.finish()
+
+
+@contextmanager
+def all_logging_disabled(highest_level=logging.CRITICAL):
+ """ source - https://gist.github.com/simon-weber/7853144
+ A context manager that will prevent any logging messages triggered during the body from being processed.
+ :param highest_level: the maximum logging level in use.
+ This would only need to be changed if a custom level greater than CRITICAL is defined.
+ """
+ previous_level = logging.root.manager.disable
+ logging.disable(highest_level)
+ try:
+ yield
+ finally:
+ logging.disable(previous_level)
diff --git a/yolov7_seg/cls/utils/loss.py b/yolov7_seg/cls/utils/loss.py
new file mode 100644
index 000000000..2d42acd03
--- /dev/null
+++ b/yolov7_seg/cls/utils/loss.py
@@ -0,0 +1,234 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Loss functions
+"""
+
+import torch
+import torch.nn as nn
+
+from utils.metrics import bbox_iou
+from utils.torch_utils import de_parallel
+
+
+def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
+ # return positive, negative label smoothing BCE targets
+ return 1.0 - 0.5 * eps, 0.5 * eps
+
+
+class BCEBlurWithLogitsLoss(nn.Module):
+ # BCEwithLogitLoss() with reduced missing label effects.
+ def __init__(self, alpha=0.05):
+ super().__init__()
+ self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
+ self.alpha = alpha
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ pred = torch.sigmoid(pred) # prob from logits
+ dx = pred - true # reduce only missing label effects
+ # dx = (pred - true).abs() # reduce missing label and false label effects
+ alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
+ loss *= alpha_factor
+ return loss.mean()
+
+
+class FocalLoss(nn.Module):
+ # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super().__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ # p_t = torch.exp(-loss)
+ # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
+
+ # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = (1.0 - p_t) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class QFocalLoss(nn.Module):
+ # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super().__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = torch.abs(true - pred_prob) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class ComputeLoss:
+ sort_obj_iou = False
+
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ m = de_parallel(model).model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
+ self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
+ self.na = m.na # number of anchors
+ self.nc = m.nc # number of classes
+ self.nl = m.nl # number of layers
+ self.anchors = m.anchors
+ self.device = device
+
+ def __call__(self, p, targets): # predictions, targets
+ lcls = torch.zeros(1, device=self.device) # class loss
+ lbox = torch.zeros(1, device=self.device) # box loss
+ lobj = torch.zeros(1, device=self.device) # object loss
+ tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ # pxy, pwh, _, pcls = pi[b, a, gj, gi].tensor_split((2, 4, 5), dim=1) # faster, requires torch 1.8.0
+ pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions
+
+ # Regression
+ pxy = pxy.sigmoid() * 2 - 0.5
+ pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ iou = iou.detach().clamp(0).type(tobj.dtype)
+ if self.sort_obj_iou:
+ j = iou.argsort()
+ b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
+ if self.gr < 1:
+ iou = (1.0 - self.gr) + self.gr * iou
+ tobj[b, a, gj, gi] = iou # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(pcls, self.cn, device=self.device) # targets
+ t[range(n), tcls[i]] = self.cp
+ lcls += self.BCEcls(pcls, t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch = [], [], [], []
+ gain = torch.ones(7, device=self.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor(
+ [
+ [0, 0],
+ [1, 0],
+ [0, 1],
+ [-1, 0],
+ [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ],
+ device=self.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors, shape = self.anchors[i], p[i].shape
+ gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain # shape(3,n,7)
+ if nt:
+ # Matches
+ r = t[..., 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1 < g) & (gxy > 1)).T
+ l, m = ((gxi % 1 < g) & (gxi > 1)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ bc, gxy, gwh, a = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
+ a, (b, c) = a.long().view(-1), bc.long().T # anchors, image, class
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid indices
+
+ # Append
+ indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+
+ return tcls, tbox, indices, anch
diff --git a/yolov7_seg/cls/utils/metrics.py b/yolov7_seg/cls/utils/metrics.py
new file mode 100644
index 000000000..f1c38db56
--- /dev/null
+++ b/yolov7_seg/cls/utils/metrics.py
@@ -0,0 +1,364 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Model validation metrics
+"""
+
+import math
+import warnings
+from pathlib import Path
+
+import matplotlib.pyplot as plt
+import numpy as np
+import torch
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
+ return (x[:, :4] * w).sum(1)
+
+
+def smooth(y, f=0.05):
+ # Box filter of fraction f
+ nf = round(len(y) * f * 2) // 2 + 1 # number of filter elements (must be odd)
+ p = np.ones(nf // 2) # ones padding
+ yp = np.concatenate((p * y[0], y, p * y[-1]), 0) # y padded
+ return np.convolve(yp, np.ones(nf) / nf, mode='valid') # y-smoothed
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16):
+ """ Compute the average precision, given the recall and precision curves.
+ Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
+ # Arguments
+ tp: True positives (nparray, nx1 or nx10).
+ conf: Objectness value from 0-1 (nparray).
+ pred_cls: Predicted object classes (nparray).
+ target_cls: True object classes (nparray).
+ plot: Plot precision-recall curve at mAP@0.5
+ save_dir: Plot save directory
+ # Returns
+ The average precision as computed in py-faster-rcnn.
+ """
+
+ # Sort by objectness
+ i = np.argsort(-conf)
+ tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
+
+ # Find unique classes
+ unique_classes, nt = np.unique(target_cls, return_counts=True)
+ nc = unique_classes.shape[0] # number of classes, number of detections
+
+ # Create Precision-Recall curve and compute AP for each class
+ px, py = np.linspace(0, 1, 1000), [] # for plotting
+ ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
+ for ci, c in enumerate(unique_classes):
+ i = pred_cls == c
+ n_l = nt[ci] # number of labels
+ n_p = i.sum() # number of predictions
+ if n_p == 0 or n_l == 0:
+ continue
+
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + eps) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+
+ # Compute F1 (harmonic mean of precision and recall)
+ f1 = 2 * p * r / (p + r + eps)
+ names = [v for k, v in names.items() if k in unique_classes] # list: only classes that have data
+ names = dict(enumerate(names)) # to dict
+ if plot:
+ plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
+
+ i = smooth(f1.mean(0), 0.1).argmax() # max F1 index
+ p, r, f1 = p[:, i], r[:, i], f1[:, i]
+ tp = (r * nt).round() # true positives
+ fp = (tp / (p + eps) - tp).round() # false positives
+ return tp, fp, p, r, f1, ap, unique_classes.astype(int)
+
+
+def compute_ap(recall, precision):
+ """ Compute the average precision, given the recall and precision curves
+ # Arguments
+ recall: The recall curve (list)
+ precision: The precision curve (list)
+ # Returns
+ Average precision, precision curve, recall curve
+ """
+
+ # Append sentinel values to beginning and end
+ mrec = np.concatenate(([0.0], recall, [1.0]))
+ mpre = np.concatenate(([1.0], precision, [0.0]))
+
+ # Compute the precision envelope
+ mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
+
+ # Integrate area under curve
+ method = 'interp' # methods: 'continuous', 'interp'
+ if method == 'interp':
+ x = np.linspace(0, 1, 101) # 101-point interp (COCO)
+ ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
+ else: # 'continuous'
+ i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
+ ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
+
+ return ap, mpre, mrec
+
+
+class ConfusionMatrix:
+ # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
+ def __init__(self, nc, conf=0.25, iou_thres=0.45):
+ self.matrix = np.zeros((nc + 1, nc + 1))
+ self.nc = nc # number of classes
+ self.conf = conf
+ self.iou_thres = iou_thres
+
+ def process_batch(self, detections, labels):
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ None, updates confusion matrix accordingly
+ """
+ if detections is None:
+ gt_classes = labels.int()
+ for i, gc in enumerate(gt_classes):
+ self.matrix[self.nc, gc] += 1 # background FN
+ return
+
+ detections = detections[detections[:, 4] > self.conf]
+ gt_classes = labels[:, 0].int()
+ detection_classes = detections[:, 5].int()
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+
+ x = torch.where(iou > self.iou_thres)
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ else:
+ matches = np.zeros((0, 3))
+
+ n = matches.shape[0] > 0
+ m0, m1, _ = matches.transpose().astype(int)
+ for i, gc in enumerate(gt_classes):
+ j = m0 == i
+ if n and sum(j) == 1:
+ self.matrix[detection_classes[m1[j]], gc] += 1 # correct
+ else:
+ self.matrix[self.nc, gc] += 1 # background FP
+
+ if n:
+ for i, dc in enumerate(detection_classes):
+ if not any(m1 == i):
+ self.matrix[dc, self.nc] += 1 # background FN
+
+ def matrix(self):
+ return self.matrix
+
+ def tp_fp(self):
+ tp = self.matrix.diagonal() # true positives
+ fp = self.matrix.sum(1) - tp # false positives
+ # fn = self.matrix.sum(0) - tp # false negatives (missed detections)
+ return tp[:-1], fp[:-1] # remove background class
+
+ def plot(self, normalize=True, save_dir='', names=()):
+ try:
+ import seaborn as sn
+
+ array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-9) if normalize else 1) # normalize columns
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig = plt.figure(figsize=(12, 9), tight_layout=True)
+ nc, nn = self.nc, len(names) # number of classes, names
+ sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size
+ labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
+ sn.heatmap(array,
+ annot=nc < 30,
+ annot_kws={
+ "size": 8},
+ cmap='Blues',
+ fmt='.2f',
+ square=True,
+ vmin=0.0,
+ xticklabels=names + ['background FP'] if labels else "auto",
+ yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
+ fig.axes[0].set_xlabel('True')
+ fig.axes[0].set_ylabel('Predicted')
+ plt.title('Confusion Matrix')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ plt.close()
+ except Exception as e:
+ print(f'WARNING: ConfusionMatrix plot failure: {e}')
+
+ def print(self):
+ for i in range(self.nc + 1):
+ print(' '.join(map(str, self.matrix[i])))
+
+
+def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)
+
+ # Get the coordinates of bounding boxes
+ if xywh: # transform from xywh to xyxy
+ (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, 1), box2.chunk(4, 1)
+ w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
+ b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
+ b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
+ else: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, 1)
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, 1)
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ # IoU
+ iou = inter / union
+ if CIoU or DIoU or GIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2
+ if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
+ with torch.no_grad():
+ alpha = v / (v - iou + (1 + eps))
+ return iou - (rho2 / c2 + v * alpha) # CIoU
+ return iou - rho2 / c2 # DIoU
+ c_area = cw * ch + eps # convex area
+ return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ return iou # IoU
+
+
+def box_area(box):
+ # box = xyxy(4,n)
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+
+def box_iou(box1, box2, eps=1e-7):
+ # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ box1 (Tensor[N, 4])
+ box2 (Tensor[M, 4])
+ Returns:
+ iou (Tensor[N, M]): the NxM matrix containing the pairwise
+ IoU values for every element in boxes1 and boxes2
+ """
+
+ # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
+ (a1, a2), (b1, b2) = box1[:, None].chunk(2, 2), box2.chunk(2, 1)
+ inter = (torch.min(a2, b2) - torch.max(a1, b1)).clamp(0).prod(2)
+
+ # IoU = inter / (area1 + area2 - inter)
+ return inter / (box_area(box1.T)[:, None] + box_area(box2.T) - inter + eps)
+
+
+def bbox_ioa(box1, box2, eps=1e-7):
+ """ Returns the intersection over box2 area given box1, box2. Boxes are x1y1x2y2
+ box1: np.array of shape(4)
+ box2: np.array of shape(nx4)
+ returns: np.array of shape(n)
+ """
+
+ # Get the coordinates of bounding boxes
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.T
+
+ # Intersection area
+ inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
+ (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)
+
+ # box2 area
+ box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + eps
+
+ # Intersection over box2 area
+ return inter_area / box2_area
+
+
+def wh_iou(wh1, wh2, eps=1e-7):
+ # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
+ wh1 = wh1[:, None] # [N,1,2]
+ wh2 = wh2[None] # [1,M,2]
+ inter = torch.min(wh1, wh2).prod(2) # [N,M]
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter + eps) # iou = inter / (area1 + area2 - inter)
+
+
+# Plots ----------------------------------------------------------------------------------------------------------------
+
+
+def plot_pr_curve(px, py, ap, save_dir=Path('pr_curve.png'), names=()):
+ # Precision-recall curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+ py = np.stack(py, axis=1)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py.T):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)
+ else:
+ ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)
+
+ ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())
+ ax.set_xlabel('Recall')
+ ax.set_ylabel('Precision')
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ plt.title('Precision-Recall Curve')
+ fig.savefig(save_dir, dpi=250)
+ plt.close()
+
+
+def plot_mc_curve(px, py, save_dir=Path('mc_curve.png'), names=(), xlabel='Confidence', ylabel='Metric'):
+ # Metric-confidence curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)
+ else:
+ ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
+
+ y = smooth(py.mean(0), 0.05)
+ ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
+ ax.set_xlabel(xlabel)
+ ax.set_ylabel(ylabel)
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ plt.title(f'{ylabel}-Confidence Curve')
+ fig.savefig(save_dir, dpi=250)
+ plt.close()
diff --git a/yolov7_seg/cls/utils/plots.py b/yolov7_seg/cls/utils/plots.py
new file mode 100644
index 000000000..b3d6be82f
--- /dev/null
+++ b/yolov7_seg/cls/utils/plots.py
@@ -0,0 +1,490 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Plotting utils
+"""
+
+import math
+import os
+from copy import copy
+from pathlib import Path
+from urllib.error import URLError
+
+import cv2
+import matplotlib
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import seaborn as sn
+import torch
+from PIL import Image, ImageDraw, ImageFont
+
+from utils.general import (CONFIG_DIR, FONT, LOGGER, Timeout, check_font, check_requirements, clip_coords,
+ increment_path, is_ascii, threaded, try_except, xywh2xyxy, xyxy2xywh)
+from utils.metrics import fitness
+
+# Settings
+RANK = int(os.getenv('RANK', -1))
+matplotlib.rc('font', **{'size': 11})
+matplotlib.use('Agg') # for writing to files only
+
+
+class Colors:
+ # Ultralytics color palette https://ultralytics.com/
+ def __init__(self):
+ # hex = matplotlib.colors.TABLEAU_COLORS.values()
+ hexs = ('FF3838', 'FF9D97', 'FF701F', 'FFB21D', 'CFD231', '48F90A', '92CC17', '3DDB86', '1A9334', '00D4BB',
+ '2C99A8', '00C2FF', '344593', '6473FF', '0018EC', '8438FF', '520085', 'CB38FF', 'FF95C8', 'FF37C7')
+ self.palette = [self.hex2rgb(f'#{c}') for c in hexs]
+ self.n = len(self.palette)
+
+ def __call__(self, i, bgr=False):
+ c = self.palette[int(i) % self.n]
+ return (c[2], c[1], c[0]) if bgr else c
+
+ @staticmethod
+ def hex2rgb(h): # rgb order (PIL)
+ return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))
+
+
+colors = Colors() # create instance for 'from utils.plots import colors'
+
+
+def check_pil_font(font=FONT, size=10):
+ # Return a PIL TrueType Font, downloading to CONFIG_DIR if necessary
+ font = Path(font)
+ font = font if font.exists() else (CONFIG_DIR / font.name)
+ try:
+ return ImageFont.truetype(str(font) if font.exists() else font.name, size)
+ except Exception: # download if missing
+ try:
+ check_font(font)
+ return ImageFont.truetype(str(font), size)
+ except TypeError:
+ check_requirements('Pillow>=8.4.0') # known issue https://github.com/ultralytics/yolov5/issues/5374
+ except URLError: # not online
+ return ImageFont.load_default()
+
+
+class Annotator:
+ # YOLOv5 Annotator for train/val mosaics and jpgs and detect/hub inference annotations
+ def __init__(self, im, line_width=None, font_size=None, font='Arial.ttf', pil=False, example='abc'):
+ assert im.data.contiguous, 'Image not contiguous. Apply np.ascontiguousarray(im) to Annotator() input images.'
+ non_ascii = not is_ascii(example) # non-latin labels, i.e. asian, arabic, cyrillic
+ self.pil = pil or non_ascii
+ if self.pil: # use PIL
+ self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
+ self.draw = ImageDraw.Draw(self.im)
+ self.font = check_pil_font(font='Arial.Unicode.ttf' if non_ascii else font,
+ size=font_size or max(round(sum(self.im.size) / 2 * 0.035), 12))
+ else: # use cv2
+ self.im = im
+ self.lw = line_width or max(round(sum(im.shape) / 2 * 0.003), 2) # line width
+
+ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 255)):
+ # Add one xyxy box to image with label
+ if self.pil or not is_ascii(label):
+ self.draw.rectangle(box, width=self.lw, outline=color) # box
+ if label:
+ w, h = self.font.getsize(label) # text width, height
+ outside = box[1] - h >= 0 # label fits outside box
+ self.draw.rectangle(
+ (box[0], box[1] - h if outside else box[1], box[0] + w + 1,
+ box[1] + 1 if outside else box[1] + h + 1),
+ fill=color,
+ )
+ # self.draw.text((box[0], box[1]), label, fill=txt_color, font=self.font, anchor='ls') # for PIL>8.0
+ self.draw.text((box[0], box[1] - h if outside else box[1]), label, fill=txt_color, font=self.font)
+ else: # cv2
+ p1, p2 = (int(box[0]), int(box[1])), (int(box[2]), int(box[3]))
+ cv2.rectangle(self.im, p1, p2, color, thickness=self.lw, lineType=cv2.LINE_AA)
+ if label:
+ tf = max(self.lw - 1, 1) # font thickness
+ w, h = cv2.getTextSize(label, 0, fontScale=self.lw / 3, thickness=tf)[0] # text width, height
+ outside = p1[1] - h >= 3
+ p2 = p1[0] + w, p1[1] - h - 3 if outside else p1[1] + h + 3
+ cv2.rectangle(self.im, p1, p2, color, -1, cv2.LINE_AA) # filled
+ cv2.putText(self.im,
+ label, (p1[0], p1[1] - 2 if outside else p1[1] + h + 2),
+ 0,
+ self.lw / 3,
+ txt_color,
+ thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ def rectangle(self, xy, fill=None, outline=None, width=1):
+ # Add rectangle to image (PIL-only)
+ self.draw.rectangle(xy, fill, outline, width)
+
+ def text(self, xy, text, txt_color=(255, 255, 255)):
+ # Add text to image (PIL-only)
+ w, h = self.font.getsize(text) # text width, height
+ self.draw.text((xy[0], xy[1] - h + 1), text, fill=txt_color, font=self.font)
+
+ def result(self):
+ # Return annotated image as array
+ return np.asarray(self.im)
+
+
+def feature_visualization(x, module_type, stage, n=32, save_dir=Path('runs/detect/exp')):
+ """
+ x: Features to be visualized
+ module_type: Module type
+ stage: Module stage within model
+ n: Maximum number of feature maps to plot
+ save_dir: Directory to save results
+ """
+ if 'Detect' not in module_type:
+ batch, channels, height, width = x.shape # batch, channels, height, width
+ if height > 1 and width > 1:
+ f = save_dir / f"stage{stage}_{module_type.split('.')[-1]}_features.png" # filename
+
+ blocks = torch.chunk(x[0].cpu(), channels, dim=0) # select batch index 0, block by channels
+ n = min(n, channels) # number of plots
+ fig, ax = plt.subplots(math.ceil(n / 8), 8, tight_layout=True) # 8 rows x n/8 cols
+ ax = ax.ravel()
+ plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze()) # cmap='gray'
+ ax[i].axis('off')
+
+ LOGGER.info(f'Saving {f}... ({n}/{channels})')
+ plt.title('Features')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ np.save(str(f.with_suffix('.npy')), x[0].cpu().numpy()) # npy save
+
+
+def hist2d(x, y, n=100):
+ # 2d histogram used in labels.png and evolve.png
+ xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
+ hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
+ xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
+ yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
+ return np.log(hist[xidx, yidx])
+
+
+def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
+ from scipy.signal import butter, filtfilt
+
+ # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
+ def butter_lowpass(cutoff, fs, order):
+ nyq = 0.5 * fs
+ normal_cutoff = cutoff / nyq
+ return butter(order, normal_cutoff, btype='low', analog=False)
+
+ b, a = butter_lowpass(cutoff, fs, order=order)
+ return filtfilt(b, a, data) # forward-backward filter
+
+
+def output_to_target(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ for *box, conf, cls in o.cpu().numpy():
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])
+ return np.array(targets)
+
+
+@threaded
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=1920, max_subplots=16):
+ # Plot image grid with labels
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+
+ # Build Image
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, im in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ im = im.transpose(1, 2, 0)
+ mosaic[y:y + h, x:x + w, :] = im
+
+ # Resize (optional)
+ scale = max_size / ns / max(h, w)
+ if scale < 1:
+ h = math.ceil(scale * h)
+ w = math.ceil(scale * w)
+ mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
+
+ # Annotate
+ fs = int((h + w) * ns * 0.01) # font size
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
+ for i in range(i + 1):
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
+ if paths:
+ annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ if len(targets) > 0:
+ ti = targets[targets[:, 0] == i] # image targets
+ boxes = xywh2xyxy(ti[:, 2:6]).T
+ classes = ti[:, 1].astype('int')
+ labels = ti.shape[1] == 6 # labels if no conf column
+ conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale < 1: # absolute coords need scale if image scales
+ boxes *= scale
+ boxes[[0, 2]] += x
+ boxes[[1, 3]] += y
+ for j, box in enumerate(boxes.T.tolist()):
+ cls = classes[j]
+ color = colors(cls)
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'
+ annotator.box_label(box, label, color=color)
+ annotator.im.save(fname) # save
+
+
+def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):
+ # Plot LR simulating training for full epochs
+ optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
+ y = []
+ for _ in range(epochs):
+ scheduler.step()
+ y.append(optimizer.param_groups[0]['lr'])
+ plt.plot(y, '.-', label='LR')
+ plt.xlabel('epoch')
+ plt.ylabel('LR')
+ plt.grid()
+ plt.xlim(0, epochs)
+ plt.ylim(0)
+ plt.savefig(Path(save_dir) / 'LR.png', dpi=200)
+ plt.close()
+
+
+def plot_val_txt(): # from utils.plots import *; plot_val()
+ # Plot val.txt histograms
+ x = np.loadtxt('val.txt', dtype=np.float32)
+ box = xyxy2xywh(x[:, :4])
+ cx, cy = box[:, 0], box[:, 1]
+
+ fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
+ ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
+ ax.set_aspect('equal')
+ plt.savefig('hist2d.png', dpi=300)
+
+ fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
+ ax[0].hist(cx, bins=600)
+ ax[1].hist(cy, bins=600)
+ plt.savefig('hist1d.png', dpi=200)
+
+
+def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
+ # Plot targets.txt histograms
+ x = np.loadtxt('targets.txt', dtype=np.float32).T
+ s = ['x targets', 'y targets', 'width targets', 'height targets']
+ fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(4):
+ ax[i].hist(x[i], bins=100, label=f'{x[i].mean():.3g} +/- {x[i].std():.3g}')
+ ax[i].legend()
+ ax[i].set_title(s[i])
+ plt.savefig('targets.jpg', dpi=200)
+
+
+def plot_val_study(file='', dir='', x=None): # from utils.plots import *; plot_val_study()
+ # Plot file=study.txt generated by val.py (or plot all study*.txt in dir)
+ save_dir = Path(file).parent if file else Path(dir)
+ plot2 = False # plot additional results
+ if plot2:
+ ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)[1].ravel()
+
+ fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
+ # for f in [save_dir / f'study_coco_{x}.txt' for x in ['yolov5n6', 'yolov5s6', 'yolov5m6', 'yolov5l6', 'yolov5x6']]:
+ for f in sorted(save_dir.glob('study*.txt')):
+ y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
+ x = np.arange(y.shape[1]) if x is None else np.array(x)
+ if plot2:
+ s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_preprocess (ms/img)', 't_inference (ms/img)', 't_NMS (ms/img)']
+ for i in range(7):
+ ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)
+ ax[i].set_title(s[i])
+
+ j = y[3].argmax() + 1
+ ax2.plot(y[5, 1:j],
+ y[3, 1:j] * 1E2,
+ '.-',
+ linewidth=2,
+ markersize=8,
+ label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
+
+ ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
+ 'k.-',
+ linewidth=2,
+ markersize=8,
+ alpha=.25,
+ label='EfficientDet')
+
+ ax2.grid(alpha=0.2)
+ ax2.set_yticks(np.arange(20, 60, 5))
+ ax2.set_xlim(0, 57)
+ ax2.set_ylim(25, 55)
+ ax2.set_xlabel('GPU Speed (ms/img)')
+ ax2.set_ylabel('COCO AP val')
+ ax2.legend(loc='lower right')
+ f = save_dir / 'study.png'
+ print(f'Saving {f}...')
+ plt.savefig(f, dpi=300)
+
+
+@try_except # known issue https://github.com/ultralytics/yolov5/issues/5395
+@Timeout(30) # known issue https://github.com/ultralytics/yolov5/issues/5611
+def plot_labels(labels, names=(), save_dir=Path('')):
+ # plot dataset labels
+ LOGGER.info(f"Plotting labels to {save_dir / 'labels.jpg'}... ")
+ c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
+ nc = int(c.max() + 1) # number of classes
+ x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])
+
+ # seaborn correlogram
+ sn.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
+ plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)
+ plt.close()
+
+ # matplotlib labels
+ matplotlib.use('svg') # faster
+ ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
+ y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
+ try: # color histogram bars by class
+ [y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # known issue #3195
+ except Exception:
+ pass
+ ax[0].set_ylabel('instances')
+ if 0 < len(names) < 30:
+ ax[0].set_xticks(range(len(names)))
+ ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ else:
+ ax[0].set_xlabel('classes')
+ sn.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
+ sn.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)
+
+ # rectangles
+ labels[:, 1:3] = 0.5 # center
+ labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
+ img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
+ for cls, *box in labels[:1000]:
+ ImageDraw.Draw(img).rectangle(box, width=1, outline=colors(cls)) # plot
+ ax[1].imshow(img)
+ ax[1].axis('off')
+
+ for a in [0, 1, 2, 3]:
+ for s in ['top', 'right', 'left', 'bottom']:
+ ax[a].spines[s].set_visible(False)
+
+ plt.savefig(save_dir / 'labels.jpg', dpi=200)
+ matplotlib.use('Agg')
+ plt.close()
+
+
+def plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *; plot_evolve()
+ # Plot evolve.csv hyp evolution results
+ evolve_csv = Path(evolve_csv)
+ data = pd.read_csv(evolve_csv)
+ keys = [x.strip() for x in data.columns]
+ x = data.values
+ f = fitness(x)
+ j = np.argmax(f) # max fitness index
+ plt.figure(figsize=(10, 12), tight_layout=True)
+ matplotlib.rc('font', **{'size': 8})
+ print(f'Best results from row {j} of {evolve_csv}:')
+ for i, k in enumerate(keys[7:]):
+ v = x[:, 7 + i]
+ mu = v[j] # best single result
+ plt.subplot(6, 5, i + 1)
+ plt.scatter(v, f, c=hist2d(v, f, 20), cmap='viridis', alpha=.8, edgecolors='none')
+ plt.plot(mu, f.max(), 'k+', markersize=15)
+ plt.title(f'{k} = {mu:.3g}', fontdict={'size': 9}) # limit to 40 characters
+ if i % 5 != 0:
+ plt.yticks([])
+ print(f'{k:>15}: {mu:.3g}')
+ f = evolve_csv.with_suffix('.png') # filename
+ plt.savefig(f, dpi=200)
+ plt.close()
+ print(f'Saved {f}')
+
+
+def plot_results(file='path/to/results.csv', dir=''):
+ # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')
+ save_dir = Path(file).parent if file else Path(dir)
+ fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
+ ax = ax.ravel()
+ files = list(save_dir.glob('results*.csv'))
+ assert len(files), f'No results.csv files found in {save_dir.resolve()}, nothing to plot.'
+ for f in files:
+ try:
+ data = pd.read_csv(f)
+ s = [x.strip() for x in data.columns]
+ x = data.values[:, 0]
+ for i, j in enumerate([1, 2, 3, 4, 5, 8, 9, 10, 6, 7]):
+ y = data.values[:, j].astype('float')
+ # y[y == 0] = np.nan # don't show zero values
+ ax[i].plot(x, y, marker='.', label=f.stem, linewidth=2, markersize=8)
+ ax[i].set_title(s[j], fontsize=12)
+ # if j in [8, 9, 10]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ LOGGER.info(f'Warning: Plotting error for {f}: {e}')
+ ax[1].legend()
+ fig.savefig(save_dir / 'results.png', dpi=200)
+ plt.close()
+
+
+def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
+ # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()
+ ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
+ s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']
+ files = list(Path(save_dir).glob('frames*.txt'))
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
+ n = results.shape[1] # number of rows
+ x = np.arange(start, min(stop, n) if stop else n)
+ results = results[:, x]
+ t = (results[0] - results[0].min()) # set t0=0s
+ results[0] = x
+ for i, a in enumerate(ax):
+ if i < len(results):
+ label = labels[fi] if len(labels) else f.stem.replace('frames_', '')
+ a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)
+ a.set_title(s[i])
+ a.set_xlabel('time (s)')
+ # if fi == len(files) - 1:
+ # a.set_ylim(bottom=0)
+ for side in ['top', 'right']:
+ a.spines[side].set_visible(False)
+ else:
+ a.remove()
+ except Exception as e:
+ print(f'Warning: Plotting error for {f}; {e}')
+ ax[1].legend()
+ plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
+
+
+def save_one_box(xyxy, im, file=Path('im.jpg'), gain=1.02, pad=10, square=False, BGR=False, save=True):
+ # Save image crop as {file} with crop size multiple {gain} and {pad} pixels. Save and/or return crop
+ xyxy = torch.tensor(xyxy).view(-1, 4)
+ b = xyxy2xywh(xyxy) # boxes
+ if square:
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # attempt rectangle to square
+ b[:, 2:] = b[:, 2:] * gain + pad # box wh * gain + pad
+ xyxy = xywh2xyxy(b).long()
+ clip_coords(xyxy, im.shape)
+ crop = im[int(xyxy[0, 1]):int(xyxy[0, 3]), int(xyxy[0, 0]):int(xyxy[0, 2]), ::(1 if BGR else -1)]
+ if save:
+ file.parent.mkdir(parents=True, exist_ok=True) # make directory
+ f = str(increment_path(file).with_suffix('.jpg'))
+ # cv2.imwrite(f, crop) # save BGR, https://github.com/ultralytics/yolov5/issues/7007 chroma subsampling issue
+ Image.fromarray(crop[..., ::-1]).save(f, quality=95, subsampling=0) # save RGB
+ return crop
diff --git a/yolov7_seg/cls/utils/torch_utils.py b/yolov7_seg/cls/utils/torch_utils.py
new file mode 100644
index 000000000..14714ce8b
--- /dev/null
+++ b/yolov7_seg/cls/utils/torch_utils.py
@@ -0,0 +1,407 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+PyTorch utils
+"""
+
+import math
+import os
+import platform
+import subprocess
+import time
+import warnings
+from contextlib import contextmanager
+from copy import deepcopy
+from pathlib import Path
+
+import torch
+import torch.distributed as dist
+import torch.nn as nn
+import torch.nn.functional as F
+from torch.nn.parallel import DistributedDataParallel as DDP
+
+from utils.general import LOGGER, check_version, colorstr, file_date, git_describe
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+try:
+ import thop # for FLOPs computation
+except ImportError:
+ thop = None
+
+# Suppress PyTorch warnings
+warnings.filterwarnings('ignore', message='User provided device_type of \'cuda\', but CUDA is not available. Disabling')
+
+
+def smart_DDP(model):
+ # Model DDP creation with checks
+ assert not check_version(torch.__version__, '1.12.0', pinned=True), \
+ 'torch==1.12.0 torchvision==0.13.0 DDP training is not supported due to a known issue. ' \
+ 'Please upgrade or downgrade torch to use DDP. See https://github.com/ultralytics/yolov5/issues/8395'
+ if check_version(torch.__version__, '1.11.0'):
+ return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK, static_graph=True)
+ else:
+ return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK)
+
+
+def update_classifier_model(model, n=1000):
+ # Update a TorchVision classification model to class count 'n'
+ name, m = list(model.named_children())[-1] # last module
+ if isinstance(m, nn.Linear):
+ setattr(model, name, nn.Linear(m.in_features, n))
+ elif isinstance(m, nn.Sequential):
+ types = [type(x) for x in m]
+ if nn.Linear in types:
+ i = types.index(nn.Linear) # nn.Linear index
+ m[i] = nn.Linear(m[i].in_features, n)
+ elif nn.Conv2d in types:
+ i = types.index(nn.Conv2d) # nn.Conv2d index
+ m[i] = nn.Conv2d(m[i].in_channels, n, m[i].kernel_size, m[i].stride, bias=m[i].bias)
+
+
+@contextmanager
+def torch_distributed_zero_first(local_rank: int):
+ # Decorator to make all processes in distributed training wait for each local_master to do something
+ if local_rank not in [-1, 0]:
+ dist.barrier(device_ids=[local_rank])
+ yield
+ if local_rank == 0:
+ dist.barrier(device_ids=[0])
+
+
+def device_count():
+ # Returns number of CUDA devices available. Safe version of torch.cuda.device_count(). Supports Linux and Windows
+ assert platform.system() in ('Linux', 'Windows'), 'device_count() only supported on Linux or Windows'
+ try:
+ cmd = 'nvidia-smi -L | wc -l' if platform.system() == 'Linux' else 'nvidia-smi -L | find /c /v ""' # Windows
+ return int(subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1])
+ except Exception:
+ return 0
+
+
+def select_device(device='', batch_size=0, newline=True):
+ # device = None or 'cpu' or 0 or '0' or '0,1,2,3'
+ s = f'YOLOv5 🚀 {git_describe() or file_date()} Python-{platform.python_version()} torch-{torch.__version__} '
+ device = str(device).strip().lower().replace('cuda:', '').replace('none', '') # to string, 'cuda:0' to '0'
+ cpu = device == 'cpu'
+ mps = device == 'mps' # Apple Metal Performance Shaders (MPS)
+ if cpu or mps:
+ os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
+ elif device: # non-cpu device requested
+ os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable - must be before assert is_available()
+ assert torch.cuda.is_available() and torch.cuda.device_count() >= len(device.replace(',', '')), \
+ f"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)"
+
+ if not (cpu or mps) and torch.cuda.is_available(): # prefer GPU if available
+ devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7
+ n = len(devices) # device count
+ if n > 1 and batch_size > 0: # check batch_size is divisible by device_count
+ assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
+ space = ' ' * (len(s) + 1)
+ for i, d in enumerate(devices):
+ p = torch.cuda.get_device_properties(i)
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / (1 << 20):.0f}MiB)\n" # bytes to MB
+ arg = 'cuda:0'
+ elif mps and getattr(torch, 'has_mps', False) and torch.backends.mps.is_available(): # prefer MPS if available
+ s += 'MPS\n'
+ arg = 'mps'
+ else: # revert to CPU
+ s += 'CPU\n'
+ arg = 'cpu'
+
+ if not newline:
+ s = s.rstrip()
+ LOGGER.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe
+ return torch.device(arg)
+
+
+def time_sync():
+ # PyTorch-accurate time
+ if torch.cuda.is_available():
+ torch.cuda.synchronize()
+ return time.time()
+
+
+def profile(input, ops, n=10, device=None):
+ # YOLOv5 speed/memory/FLOPs profiler
+ #
+ # Usage:
+ # input = torch.randn(16, 3, 640, 640)
+ # m1 = lambda x: x * torch.sigmoid(x)
+ # m2 = nn.SiLU()
+ # profile(input, [m1, m2], n=100) # profile over 100 iterations
+
+ results = []
+ if not isinstance(device, torch.device):
+ device = select_device(device)
+ print(f"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}"
+ f"{'input':>24s}{'output':>24s}")
+
+ for x in input if isinstance(input, list) else [input]:
+ x = x.to(device)
+ x.requires_grad = True
+ for m in ops if isinstance(ops, list) else [ops]:
+ m = m.to(device) if hasattr(m, 'to') else m # device
+ m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m
+ tf, tb, t = 0, 0, [0, 0, 0] # dt forward, backward
+ try:
+ flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPs
+ except Exception:
+ flops = 0
+
+ try:
+ for _ in range(n):
+ t[0] = time_sync()
+ y = m(x)
+ t[1] = time_sync()
+ try:
+ _ = (sum(yi.sum() for yi in y) if isinstance(y, list) else y).sum().backward()
+ t[2] = time_sync()
+ except Exception: # no backward method
+ # print(e) # for debug
+ t[2] = float('nan')
+ tf += (t[1] - t[0]) * 1000 / n # ms per op forward
+ tb += (t[2] - t[1]) * 1000 / n # ms per op backward
+ mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0 # (GB)
+ s_in, s_out = (tuple(x.shape) if isinstance(x, torch.Tensor) else 'list' for x in (x, y)) # shapes
+ p = sum(x.numel() for x in m.parameters()) if isinstance(m, nn.Module) else 0 # parameters
+ print(f'{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}')
+ results.append([p, flops, mem, tf, tb, s_in, s_out])
+ except Exception as e:
+ print(e)
+ results.append(None)
+ torch.cuda.empty_cache()
+ return results
+
+
+def is_parallel(model):
+ # Returns True if model is of type DP or DDP
+ return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
+
+
+def de_parallel(model):
+ # De-parallelize a model: returns single-GPU model if model is of type DP or DDP
+ return model.module if is_parallel(model) else model
+
+
+def initialize_weights(model):
+ for m in model.modules():
+ t = type(m)
+ if t is nn.Conv2d:
+ pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
+ elif t is nn.BatchNorm2d:
+ m.eps = 1e-3
+ m.momentum = 0.03
+ elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
+ m.inplace = True
+
+
+def find_modules(model, mclass=nn.Conv2d):
+ # Finds layer indices matching module class 'mclass'
+ return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
+
+
+def sparsity(model):
+ # Return global model sparsity
+ a, b = 0, 0
+ for p in model.parameters():
+ a += p.numel()
+ b += (p == 0).sum()
+ return b / a
+
+
+def prune(model, amount=0.3):
+ # Prune model to requested global sparsity
+ import torch.nn.utils.prune as prune
+ print('Pruning model... ', end='')
+ for name, m in model.named_modules():
+ if isinstance(m, nn.Conv2d):
+ prune.l1_unstructured(m, name='weight', amount=amount) # prune
+ prune.remove(m, 'weight') # make permanent
+ print(' %.3g global sparsity' % sparsity(model))
+
+
+def fuse_conv_and_bn(conv, bn):
+ # Fuse Conv2d() and BatchNorm2d() layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
+ fusedconv = nn.Conv2d(conv.in_channels,
+ conv.out_channels,
+ kernel_size=conv.kernel_size,
+ stride=conv.stride,
+ padding=conv.padding,
+ groups=conv.groups,
+ bias=True).requires_grad_(False).to(conv.weight.device)
+
+ # Prepare filters
+ w_conv = conv.weight.clone().view(conv.out_channels, -1)
+ w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
+ fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
+
+ # Prepare spatial bias
+ b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
+ b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
+ fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
+
+ return fusedconv
+
+
+def model_info(model, verbose=False, img_size=640):
+ # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
+ n_p = sum(x.numel() for x in model.parameters()) # number parameters
+ n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
+ if verbose:
+ print(f"{'layer':>5} {'name':>40} {'gradient':>9} {'parameters':>12} {'shape':>20} {'mu':>10} {'sigma':>10}")
+ for i, (name, p) in enumerate(model.named_parameters()):
+ name = name.replace('module_list.', '')
+ print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
+ (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
+
+ try: # FLOPs
+ from thop import profile
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32
+ img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input
+ flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
+ img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float
+ fs = ', %.1f GFLOPs' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPs
+ except Exception:
+ fs = ''
+
+ name = Path(model.yaml_file).stem.replace('yolov5', 'YOLOv5') if hasattr(model, 'yaml_file') else 'Model'
+ LOGGER.info(f"{name} summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
+
+
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # Scales img(bs,3,y,x) by ratio constrained to gs-multiple
+ if ratio == 1.0:
+ return img
+ h, w = img.shape[2:]
+ s = (int(h * ratio), int(w * ratio)) # new size
+ img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
+ if not same_shape: # pad/crop img
+ h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))
+ return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
+
+
+def copy_attr(a, b, include=(), exclude=()):
+ # Copy attributes from b to a, options to only include [...] and to exclude [...]
+ for k, v in b.__dict__.items():
+ if (len(include) and k not in include) or k.startswith('_') or k in exclude:
+ continue
+ else:
+ setattr(a, k, v)
+
+
+def smart_optimizer(model, name='Adam', lr=0.001, momentum=0.9, decay=1e-5):
+ # YOLOv5 3-param group optimizer: 0) weights with decay, 1) weights no decay, 2) biases no decay
+ g = [], [], [] # optimizer parameter groups
+ bn = tuple(v for k, v in nn.__dict__.items() if 'Norm' in k) # normalization layers, i.e. BatchNorm2d()
+ for v in model.modules():
+ if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter): # bias (no decay)
+ g[2].append(v.bias)
+ if isinstance(v, bn): # weight (no decay)
+ g[1].append(v.weight)
+ elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter): # weight (with decay)
+ g[0].append(v.weight)
+
+ if name == 'Adam':
+ optimizer = torch.optim.Adam(g[2], lr=lr, betas=(momentum, 0.999)) # adjust beta1 to momentum
+ elif name == 'AdamW':
+ optimizer = torch.optim.AdamW(g[2], lr=lr, betas=(momentum, 0.999), weight_decay=0.0)
+ elif name == 'RMSProp':
+ optimizer = torch.optim.RMSprop(g[2], lr=lr, momentum=momentum)
+ elif name == 'SGD':
+ optimizer = torch.optim.SGD(g[2], lr=lr, momentum=momentum, nesterov=True)
+ else:
+ raise NotImplementedError(f'Optimizer {name} not implemented.')
+
+ optimizer.add_param_group({'params': g[0], 'weight_decay': decay}) # add g0 with weight_decay
+ optimizer.add_param_group({'params': g[1], 'weight_decay': 0.0}) # add g1 (BatchNorm2d weights)
+ LOGGER.info(f"{colorstr('optimizer:')} {type(optimizer).__name__}(lr={lr}) with parameter groups "
+ f"{len(g[1])} weight(decay=0.0), {len(g[0])} weight(decay={decay}), {len(g[2])} bias")
+ return optimizer
+
+
+def smart_hub_load(repo='ultralytics/yolov5', model='yolov5s', **kwargs):
+ # YOLOv5 torch.hub.load() wrapper with smart error/issue handling
+ if check_version(torch.__version__, '1.12.0'):
+ kwargs['trust_repo'] = True # argument required starting in torch 0.12
+ try:
+ return torch.hub.load(repo, model, **kwargs)
+ except Exception:
+ return torch.hub.load(repo, model, force_reload=True, **kwargs)
+
+
+def smart_resume(ckpt, optimizer, ema=None, weights='yolov5s.pt', epochs=300, resume=True):
+ # Resume training from a partially trained checkpoint
+ best_fitness = 0.0
+ start_epoch = ckpt['epoch'] + 1
+ if ckpt['optimizer'] is not None:
+ optimizer.load_state_dict(ckpt['optimizer']) # optimizer
+ best_fitness = ckpt['best_fitness']
+ if ema and ckpt.get('ema'):
+ ema.ema.load_state_dict(ckpt['ema'].float().state_dict()) # EMA
+ ema.updates = ckpt['updates']
+ if resume:
+ assert start_epoch > 0, f'{weights} training to {epochs} epochs is finished, nothing to resume.\n' \
+ f"Start a new training without --resume, i.e. 'python train.py --weights {weights}'"
+ LOGGER.info(f'Resuming training from {weights} from epoch {start_epoch} to {epochs} total epochs')
+ if epochs < start_epoch:
+ LOGGER.info(f"{weights} has been trained for {ckpt['epoch']} epochs. Fine-tuning for {epochs} more epochs.")
+ epochs += ckpt['epoch'] # finetune additional epochs
+ return best_fitness, start_epoch, epochs
+
+
+class EarlyStopping:
+ # YOLOv5 simple early stopper
+ def __init__(self, patience=30):
+ self.best_fitness = 0.0 # i.e. mAP
+ self.best_epoch = 0
+ self.patience = patience or float('inf') # epochs to wait after fitness stops improving to stop
+ self.possible_stop = False # possible stop may occur next epoch
+
+ def __call__(self, epoch, fitness):
+ if fitness >= self.best_fitness: # >= 0 to allow for early zero-fitness stage of training
+ self.best_epoch = epoch
+ self.best_fitness = fitness
+ delta = epoch - self.best_epoch # epochs without improvement
+ self.possible_stop = delta >= (self.patience - 1) # possible stop may occur next epoch
+ stop = delta >= self.patience # stop training if patience exceeded
+ if stop:
+ LOGGER.info(f'Stopping training early as no improvement observed in last {self.patience} epochs. '
+ f'Best results observed at epoch {self.best_epoch}, best model saved as best.pt.\n'
+ f'To update EarlyStopping(patience={self.patience}) pass a new patience value, '
+ f'i.e. `python train.py --patience 300` or use `--patience 0` to disable EarlyStopping.')
+ return stop
+
+
+class ModelEMA:
+ """ Updated Exponential Moving Average (EMA) from https://github.com/rwightman/pytorch-image-models
+ Keeps a moving average of everything in the model state_dict (parameters and buffers)
+ For EMA details see https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
+ """
+
+ def __init__(self, model, decay=0.9999, tau=2000, updates=0):
+ # Create EMA
+ self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA
+ # if next(model.parameters()).device.type != 'cpu':
+ # self.ema.half() # FP16 EMA
+ self.updates = updates # number of EMA updates
+ self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)
+ for p in self.ema.parameters():
+ p.requires_grad_(False)
+
+ def update(self, model):
+ # Update EMA parameters
+ with torch.no_grad():
+ self.updates += 1
+ d = self.decay(self.updates)
+
+ msd = de_parallel(model).state_dict() # model state_dict
+ for k, v in self.ema.state_dict().items():
+ if v.dtype.is_floating_point:
+ v *= d
+ v += (1 - d) * msd[k].detach()
+
+ def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
+ # Update EMA attributes
+ copy_attr(self.ema, model, include, exclude)
diff --git a/yolov7_seg/cls/val.py b/yolov7_seg/cls/val.py
new file mode 100644
index 000000000..960cd5f2b
--- /dev/null
+++ b/yolov7_seg/cls/val.py
@@ -0,0 +1,396 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a trained YOLOv5 model accuracy on a custom dataset
+
+Usage:
+ $ python path/to/val.py --weights yolov5s.pt --data coco128.yaml --img 640
+
+Usage - formats:
+ $ python path/to/val.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import json
+import os
+import sys
+from pathlib import Path
+
+import numpy as np
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.callbacks import Callbacks
+from utils.dataloaders import create_dataloader
+from utils.general import (LOGGER, check_dataset, check_img_size, check_requirements, check_yaml,
+ coco80_to_coco91_class, colorstr, emojis, increment_path, non_max_suppression, print_args,
+ scale_coords, xywh2xyxy, xyxy2xywh)
+from utils.metrics import ConfusionMatrix, ap_per_class, box_iou
+from utils.plots import output_to_target, plot_images, plot_val_study
+from utils.torch_utils import select_device, time_sync
+
+
+def save_one_txt(predn, save_conf, shape, file):
+ # Save one txt result
+ gn = torch.tensor(shape)[[1, 0, 1, 0]] # normalization gain whwh
+ for *xyxy, conf, cls in predn.tolist():
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(file, 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+
+def save_one_json(predn, jdict, path, class_map):
+ # Save one JSON result {"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}
+ image_id = int(path.stem) if path.stem.isnumeric() else path.stem
+ box = xyxy2xywh(predn[:, :4]) # xywh
+ box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
+ for p, b in zip(predn.tolist(), box.tolist()):
+ jdict.append({
+ 'image_id': image_id,
+ 'category_id': class_map[int(p[5])],
+ 'bbox': [round(x, 3) for x in b],
+ 'score': round(p[4], 5)})
+
+
+def process_batch(detections, labels, iouv):
+ """
+ Return correct predictions matrix. Both sets of boxes are in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ correct (Array[N, 10]), for 10 IoU levels
+ """
+ correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+ correct_class = labels[:, 0:1] == detections[:, 5]
+ for i in range(len(iouv)):
+ x = torch.where((iou >= iouv[i]) & correct_class) # IoU > threshold and classes match
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detect, iou]
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ # matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ correct[matches[:, 1].astype(int), i] = True
+ return torch.tensor(correct, dtype=torch.bool, device=iouv.device)
+
+
+@torch.no_grad()
+def run(
+ data,
+ weights=None, # model.pt path(s)
+ batch_size=32, # batch size
+ imgsz=640, # inference size (pixels)
+ conf_thres=0.001, # confidence threshold
+ iou_thres=0.6, # NMS IoU threshold
+ task='val', # train, val, test, speed or study
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ workers=8, # max dataloader workers (per RANK in DDP mode)
+ single_cls=False, # treat as single-class dataset
+ augment=False, # augmented inference
+ verbose=False, # verbose output
+ save_txt=False, # save results to *.txt
+ save_hybrid=False, # save label+prediction hybrid results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_json=False, # save a COCO-JSON results file
+ project=ROOT / 'runs/val', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=True, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ model=None,
+ dataloader=None,
+ save_dir=Path(''),
+ plots=True,
+ callbacks=Callbacks(),
+ compute_loss=None,
+):
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ model.half() if half else model.float()
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ if engine:
+ batch_size = model.batch_size
+ else:
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
+
+ # Data
+ data = check_dataset(data) # check
+
+ # Configure
+ model.eval()
+ cuda = device.type != 'cpu'
+ is_coco = isinstance(data.get('val'), str) and data['val'].endswith(f'coco{os.sep}val2017.txt') # COCO dataset
+ nc = 1 if single_cls else int(data['nc']) # number of classes
+ iouv = torch.linspace(0.5, 0.95, 10, device=device) # iou vector for mAP@0.5:0.95
+ niou = iouv.numel()
+
+ # Dataloader
+ if not training:
+ if pt and not single_cls: # check --weights are trained on --data
+ ncm = model.model.nc
+ assert ncm == nc, f'{weights} ({ncm} classes) trained on different --data than what you passed ({nc} ' \
+ f'classes). Pass correct combination of --weights and --data that are trained together.'
+ model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
+ pad = 0.0 if task in ('speed', 'benchmark') else 0.5
+ rect = False if task == 'benchmark' else pt # square inference for benchmarks
+ task = task if task in ('train', 'val', 'test') else 'val' # path to train/val/test images
+ dataloader = create_dataloader(data[task],
+ imgsz,
+ batch_size,
+ stride,
+ single_cls,
+ pad=pad,
+ rect=rect,
+ workers=workers,
+ prefix=colorstr(f'{task}: '))[0]
+
+ seen = 0
+ confusion_matrix = ConfusionMatrix(nc=nc)
+ names = dict(enumerate(model.names if hasattr(model, 'names') else model.module.names))
+ class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
+ s = ('%20s' + '%11s' * 6) % ('Class', 'Images', 'Labels', 'P', 'R', 'mAP@.5', 'mAP@.5:.95')
+ dt, p, r, f1, mp, mr, map50, map = [0.0, 0.0, 0.0], 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
+ loss = torch.zeros(3, device=device)
+ jdict, stats, ap, ap_class = [], [], [], []
+ callbacks.run('on_val_start')
+ pbar = tqdm(dataloader, desc=s, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ for batch_i, (im, targets, paths, shapes) in enumerate(pbar):
+ callbacks.run('on_val_batch_start')
+ t1 = time_sync()
+ if cuda:
+ im = im.to(device, non_blocking=True)
+ targets = targets.to(device)
+ im = im.half() if half else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ nb, _, height, width = im.shape # batch size, channels, height, width
+ t2 = time_sync()
+ dt[0] += t2 - t1
+
+ # Inference
+ out, train_out = model(im) if training else model(im, augment=augment, val=True) # inference, loss outputs
+ dt[1] += time_sync() - t2
+
+ # Loss
+ if compute_loss:
+ loss += compute_loss([x.float() for x in train_out], targets)[1] # box, obj, cls
+
+ # NMS
+ targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
+ lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
+ t3 = time_sync()
+ out = non_max_suppression(out, conf_thres, iou_thres, labels=lb, multi_label=True, agnostic=single_cls)
+ dt[2] += time_sync() - t3
+
+ # Metrics
+ for si, pred in enumerate(out):
+ labels = targets[targets[:, 0] == si, 1:]
+ nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
+ path, shape = Path(paths[si]), shapes[si][0]
+ correct = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
+ seen += 1
+
+ if npr == 0:
+ if nl:
+ stats.append((correct, *torch.zeros((2, 0), device=device), labels[:, 0]))
+ if plots:
+ confusion_matrix.process_batch(detections=None, labels=labels[:, 0])
+ continue
+
+ # Predictions
+ if single_cls:
+ pred[:, 5] = 0
+ predn = pred.clone()
+ scale_coords(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
+
+ # Evaluate
+ if nl:
+ tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
+ scale_coords(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
+ labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
+ correct = process_batch(predn, labelsn, iouv)
+ if plots:
+ confusion_matrix.process_batch(predn, labelsn)
+ stats.append((correct, pred[:, 4], pred[:, 5], labels[:, 0])) # (correct, conf, pcls, tcls)
+
+ # Save/log
+ if save_txt:
+ save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / f'{path.stem}.txt')
+ if save_json:
+ save_one_json(predn, jdict, path, class_map) # append to COCO-JSON dictionary
+ callbacks.run('on_val_image_end', pred, predn, path, names, im[si])
+
+ # Plot images
+ if plots and batch_i < 3:
+ plot_images(im, targets, paths, save_dir / f'val_batch{batch_i}_labels.jpg', names) # labels
+ plot_images(im, output_to_target(out), paths, save_dir / f'val_batch{batch_i}_pred.jpg', names) # pred
+
+ callbacks.run('on_val_batch_end')
+
+ # Compute metrics
+ stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
+ if len(stats) and stats[0].any():
+ tp, fp, p, r, f1, ap, ap_class = ap_per_class(*stats, plot=plots, save_dir=save_dir, names=names)
+ ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95
+ mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
+ nt = np.bincount(stats[3].astype(int), minlength=nc) # number of targets per class
+
+ # Print results
+ pf = '%20s' + '%11i' * 2 + '%11.3g' * 4 # print format
+ LOGGER.info(pf % ('all', seen, nt.sum(), mp, mr, map50, map))
+ if nt.sum() == 0:
+ LOGGER.warning(emojis(f'WARNING: no labels found in {task} set, can not compute metrics without labels ⚠️'))
+
+ # Print results per class
+ if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
+ for i, c in enumerate(ap_class):
+ LOGGER.info(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
+
+ # Print speeds
+ t = tuple(x / seen * 1E3 for x in dt) # speeds per image
+ if not training:
+ shape = (batch_size, 3, imgsz, imgsz)
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}' % t)
+
+ # Plots
+ if plots:
+ confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
+ callbacks.run('on_val_end')
+
+ # Save JSON
+ if save_json and len(jdict):
+ w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
+ anno_json = str(Path(data.get('path', '../coco')) / 'annotations/instances_val2017.json') # annotations json
+ pred_json = str(save_dir / f"{w}_predictions.json") # predictions json
+ LOGGER.info(f'\nEvaluating pycocotools mAP... saving {pred_json}...')
+ with open(pred_json, 'w') as f:
+ json.dump(jdict, f)
+
+ try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
+ check_requirements(['pycocotools'])
+ from pycocotools.coco import COCO
+ from pycocotools.cocoeval import COCOeval
+
+ anno = COCO(anno_json) # init annotations api
+ pred = anno.loadRes(pred_json) # init predictions api
+ eval = COCOeval(anno, pred, 'bbox')
+ if is_coco:
+ eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.im_files] # image IDs to evaluate
+ eval.evaluate()
+ eval.accumulate()
+ eval.summarize()
+ map, map50 = eval.stats[:2] # update results (mAP@0.5:0.95, mAP@0.5)
+ except Exception as e:
+ LOGGER.info(f'pycocotools unable to run: {e}')
+
+ # Return results
+ model.float() # for training
+ if not training:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ maps = np.zeros(nc) + map
+ for i, c in enumerate(ap_class):
+ maps[c] = ap[i]
+ return (mp, mr, map50, map, *(loss.cpu() / len(dataloader)).tolist()), maps, t
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model.pt path(s)')
+ parser.add_argument('--batch-size', type=int, default=32, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold')
+ parser.add_argument('--task', default='val', help='train, val, test, speed or study')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--verbose', action='store_true', help='report mAP by class')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-json', action='store_true', help='save a COCO-JSON results file')
+ parser.add_argument('--project', default=ROOT / 'runs/val', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.data = check_yaml(opt.data) # check YAML
+ opt.save_json |= opt.data.endswith('coco.yaml')
+ opt.save_txt |= opt.save_hybrid
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ check_requirements(requirements=ROOT / 'requirements.txt', exclude=('tensorboard', 'thop'))
+
+ if opt.task in ('train', 'val', 'test'): # run normally
+ if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
+ LOGGER.info(emojis(f'WARNING: confidence threshold {opt.conf_thres} > 0.001 produces invalid results ⚠️'))
+ run(**vars(opt))
+
+ else:
+ weights = opt.weights if isinstance(opt.weights, list) else [opt.weights]
+ opt.half = True # FP16 for fastest results
+ if opt.task == 'speed': # speed benchmarks
+ # python val.py --task speed --data coco.yaml --batch 1 --weights yolov5n.pt yolov5s.pt...
+ opt.conf_thres, opt.iou_thres, opt.save_json = 0.25, 0.45, False
+ for opt.weights in weights:
+ run(**vars(opt), plots=False)
+
+ elif opt.task == 'study': # speed vs mAP benchmarks
+ # python val.py --task study --data coco.yaml --iou 0.7 --weights yolov5n.pt yolov5s.pt...
+ for opt.weights in weights:
+ f = f'study_{Path(opt.data).stem}_{Path(opt.weights).stem}.txt' # filename to save to
+ x, y = list(range(256, 1536 + 128, 128)), [] # x axis (image sizes), y axis
+ for opt.imgsz in x: # img-size
+ LOGGER.info(f'\nRunning {f} --imgsz {opt.imgsz}...')
+ r, _, t = run(**vars(opt), plots=False)
+ y.append(r + t) # results and times
+ np.savetxt(f, y, fmt='%10.4g') # save
+ os.system('zip -r study.zip study_*.txt')
+ plot_val_study(x=x) # plot
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/det/LICENSE b/yolov7_seg/det/LICENSE
new file mode 100644
index 000000000..d96f36bb0
--- /dev/null
+++ b/yolov7_seg/det/LICENSE
@@ -0,0 +1,674 @@
+GNU GENERAL PUBLIC LICENSE
+ Version 3, 29 June 2007
+
+ Copyright (C) 2007 Free Software Foundation, Inc.
+ Everyone is permitted to copy and distribute verbatim copies
+ of this license document, but changing it is not allowed.
+
+ Preamble
+
+ The GNU General Public License is a free, copyleft license for
+software and other kinds of works.
+
+ The licenses for most software and other practical works are designed
+to take away your freedom to share and change the works. By contrast,
+the GNU General Public License is intended to guarantee your freedom to
+share and change all versions of a program--to make sure it remains free
+software for all its users. We, the Free Software Foundation, use the
+GNU General Public License for most of our software; it applies also to
+any other work released this way by its authors. You can apply it to
+your programs, too.
+
+ When we speak of free software, we are referring to freedom, not
+price. Our General Public Licenses are designed to make sure that you
+have the freedom to distribute copies of free software (and charge for
+them if you wish), that you receive source code or can get it if you
+want it, that you can change the software or use pieces of it in new
+free programs, and that you know you can do these things.
+
+ To protect your rights, we need to prevent others from denying you
+these rights or asking you to surrender the rights. Therefore, you have
+certain responsibilities if you distribute copies of the software, or if
+you modify it: responsibilities to respect the freedom of others.
+
+ For example, if you distribute copies of such a program, whether
+gratis or for a fee, you must pass on to the recipients the same
+freedoms that you received. You must make sure that they, too, receive
+or can get the source code. And you must show them these terms so they
+know their rights.
+
+ Developers that use the GNU GPL protect your rights with two steps:
+(1) assert copyright on the software, and (2) offer you this License
+giving you legal permission to copy, distribute and/or modify it.
+
+ For the developers' and authors' protection, the GPL clearly explains
+that there is no warranty for this free software. For both users' and
+authors' sake, the GPL requires that modified versions be marked as
+changed, so that their problems will not be attributed erroneously to
+authors of previous versions.
+
+ Some devices are designed to deny users access to install or run
+modified versions of the software inside them, although the manufacturer
+can do so. This is fundamentally incompatible with the aim of
+protecting users' freedom to change the software. The systematic
+pattern of such abuse occurs in the area of products for individuals to
+use, which is precisely where it is most unacceptable. Therefore, we
+have designed this version of the GPL to prohibit the practice for those
+products. If such problems arise substantially in other domains, we
+stand ready to extend this provision to those domains in future versions
+of the GPL, as needed to protect the freedom of users.
+
+ Finally, every program is threatened constantly by software patents.
+States should not allow patents to restrict development and use of
+software on general-purpose computers, but in those that do, we wish to
+avoid the special danger that patents applied to a free program could
+make it effectively proprietary. To prevent this, the GPL assures that
+patents cannot be used to render the program non-free.
+
+ The precise terms and conditions for copying, distribution and
+modification follow.
+
+ TERMS AND CONDITIONS
+
+ 0. Definitions.
+
+ "This License" refers to version 3 of the GNU General Public License.
+
+ "Copyright" also means copyright-like laws that apply to other kinds of
+works, such as semiconductor masks.
+
+ "The Program" refers to any copyrightable work licensed under this
+License. Each licensee is addressed as "you". "Licensees" and
+"recipients" may be individuals or organizations.
+
+ To "modify" a work means to copy from or adapt all or part of the work
+in a fashion requiring copyright permission, other than the making of an
+exact copy. The resulting work is called a "modified version" of the
+earlier work or a work "based on" the earlier work.
+
+ A "covered work" means either the unmodified Program or a work based
+on the Program.
+
+ To "propagate" a work means to do anything with it that, without
+permission, would make you directly or secondarily liable for
+infringement under applicable copyright law, except executing it on a
+computer or modifying a private copy. Propagation includes copying,
+distribution (with or without modification), making available to the
+public, and in some countries other activities as well.
+
+ To "convey" a work means any kind of propagation that enables other
+parties to make or receive copies. Mere interaction with a user through
+a computer network, with no transfer of a copy, is not conveying.
+
+ An interactive user interface displays "Appropriate Legal Notices"
+to the extent that it includes a convenient and prominently visible
+feature that (1) displays an appropriate copyright notice, and (2)
+tells the user that there is no warranty for the work (except to the
+extent that warranties are provided), that licensees may convey the
+work under this License, and how to view a copy of this License. If
+the interface presents a list of user commands or options, such as a
+menu, a prominent item in the list meets this criterion.
+
+ 1. Source Code.
+
+ The "source code" for a work means the preferred form of the work
+for making modifications to it. "Object code" means any non-source
+form of a work.
+
+ A "Standard Interface" means an interface that either is an official
+standard defined by a recognized standards body, or, in the case of
+interfaces specified for a particular programming language, one that
+is widely used among developers working in that language.
+
+ The "System Libraries" of an executable work include anything, other
+than the work as a whole, that (a) is included in the normal form of
+packaging a Major Component, but which is not part of that Major
+Component, and (b) serves only to enable use of the work with that
+Major Component, or to implement a Standard Interface for which an
+implementation is available to the public in source code form. A
+"Major Component", in this context, means a major essential component
+(kernel, window system, and so on) of the specific operating system
+(if any) on which the executable work runs, or a compiler used to
+produce the work, or an object code interpreter used to run it.
+
+ The "Corresponding Source" for a work in object code form means all
+the source code needed to generate, install, and (for an executable
+work) run the object code and to modify the work, including scripts to
+control those activities. However, it does not include the work's
+System Libraries, or general-purpose tools or generally available free
+programs which are used unmodified in performing those activities but
+which are not part of the work. For example, Corresponding Source
+includes interface definition files associated with source files for
+the work, and the source code for shared libraries and dynamically
+linked subprograms that the work is specifically designed to require,
+such as by intimate data communication or control flow between those
+subprograms and other parts of the work.
+
+ The Corresponding Source need not include anything that users
+can regenerate automatically from other parts of the Corresponding
+Source.
+
+ The Corresponding Source for a work in source code form is that
+same work.
+
+ 2. Basic Permissions.
+
+ All rights granted under this License are granted for the term of
+copyright on the Program, and are irrevocable provided the stated
+conditions are met. This License explicitly affirms your unlimited
+permission to run the unmodified Program. The output from running a
+covered work is covered by this License only if the output, given its
+content, constitutes a covered work. This License acknowledges your
+rights of fair use or other equivalent, as provided by copyright law.
+
+ You may make, run and propagate covered works that you do not
+convey, without conditions so long as your license otherwise remains
+in force. You may convey covered works to others for the sole purpose
+of having them make modifications exclusively for you, or provide you
+with facilities for running those works, provided that you comply with
+the terms of this License in conveying all material for which you do
+not control copyright. Those thus making or running the covered works
+for you must do so exclusively on your behalf, under your direction
+and control, on terms that prohibit them from making any copies of
+your copyrighted material outside their relationship with you.
+
+ Conveying under any other circumstances is permitted solely under
+the conditions stated below. Sublicensing is not allowed; section 10
+makes it unnecessary.
+
+ 3. Protecting Users' Legal Rights From Anti-Circumvention Law.
+
+ No covered work shall be deemed part of an effective technological
+measure under any applicable law fulfilling obligations under article
+11 of the WIPO copyright treaty adopted on 20 December 1996, or
+similar laws prohibiting or restricting circumvention of such
+measures.
+
+ When you convey a covered work, you waive any legal power to forbid
+circumvention of technological measures to the extent such circumvention
+is effected by exercising rights under this License with respect to
+the covered work, and you disclaim any intention to limit operation or
+modification of the work as a means of enforcing, against the work's
+users, your or third parties' legal rights to forbid circumvention of
+technological measures.
+
+ 4. Conveying Verbatim Copies.
+
+ You may convey verbatim copies of the Program's source code as you
+receive it, in any medium, provided that you conspicuously and
+appropriately publish on each copy an appropriate copyright notice;
+keep intact all notices stating that this License and any
+non-permissive terms added in accord with section 7 apply to the code;
+keep intact all notices of the absence of any warranty; and give all
+recipients a copy of this License along with the Program.
+
+ You may charge any price or no price for each copy that you convey,
+and you may offer support or warranty protection for a fee.
+
+ 5. Conveying Modified Source Versions.
+
+ You may convey a work based on the Program, or the modifications to
+produce it from the Program, in the form of source code under the
+terms of section 4, provided that you also meet all of these conditions:
+
+ a) The work must carry prominent notices stating that you modified
+ it, and giving a relevant date.
+
+ b) The work must carry prominent notices stating that it is
+ released under this License and any conditions added under section
+ 7. This requirement modifies the requirement in section 4 to
+ "keep intact all notices".
+
+ c) You must license the entire work, as a whole, under this
+ License to anyone who comes into possession of a copy. This
+ License will therefore apply, along with any applicable section 7
+ additional terms, to the whole of the work, and all its parts,
+ regardless of how they are packaged. This License gives no
+ permission to license the work in any other way, but it does not
+ invalidate such permission if you have separately received it.
+
+ d) If the work has interactive user interfaces, each must display
+ Appropriate Legal Notices; however, if the Program has interactive
+ interfaces that do not display Appropriate Legal Notices, your
+ work need not make them do so.
+
+ A compilation of a covered work with other separate and independent
+works, which are not by their nature extensions of the covered work,
+and which are not combined with it such as to form a larger program,
+in or on a volume of a storage or distribution medium, is called an
+"aggregate" if the compilation and its resulting copyright are not
+used to limit the access or legal rights of the compilation's users
+beyond what the individual works permit. Inclusion of a covered work
+in an aggregate does not cause this License to apply to the other
+parts of the aggregate.
+
+ 6. Conveying Non-Source Forms.
+
+ You may convey a covered work in object code form under the terms
+of sections 4 and 5, provided that you also convey the
+machine-readable Corresponding Source under the terms of this License,
+in one of these ways:
+
+ a) Convey the object code in, or embodied in, a physical product
+ (including a physical distribution medium), accompanied by the
+ Corresponding Source fixed on a durable physical medium
+ customarily used for software interchange.
+
+ b) Convey the object code in, or embodied in, a physical product
+ (including a physical distribution medium), accompanied by a
+ written offer, valid for at least three years and valid for as
+ long as you offer spare parts or customer support for that product
+ model, to give anyone who possesses the object code either (1) a
+ copy of the Corresponding Source for all the software in the
+ product that is covered by this License, on a durable physical
+ medium customarily used for software interchange, for a price no
+ more than your reasonable cost of physically performing this
+ conveying of source, or (2) access to copy the
+ Corresponding Source from a network server at no charge.
+
+ c) Convey individual copies of the object code with a copy of the
+ written offer to provide the Corresponding Source. This
+ alternative is allowed only occasionally and noncommercially, and
+ only if you received the object code with such an offer, in accord
+ with subsection 6b.
+
+ d) Convey the object code by offering access from a designated
+ place (gratis or for a charge), and offer equivalent access to the
+ Corresponding Source in the same way through the same place at no
+ further charge. You need not require recipients to copy the
+ Corresponding Source along with the object code. If the place to
+ copy the object code is a network server, the Corresponding Source
+ may be on a different server (operated by you or a third party)
+ that supports equivalent copying facilities, provided you maintain
+ clear directions next to the object code saying where to find the
+ Corresponding Source. Regardless of what server hosts the
+ Corresponding Source, you remain obligated to ensure that it is
+ available for as long as needed to satisfy these requirements.
+
+ e) Convey the object code using peer-to-peer transmission, provided
+ you inform other peers where the object code and Corresponding
+ Source of the work are being offered to the general public at no
+ charge under subsection 6d.
+
+ A separable portion of the object code, whose source code is excluded
+from the Corresponding Source as a System Library, need not be
+included in conveying the object code work.
+
+ A "User Product" is either (1) a "consumer product", which means any
+tangible personal property which is normally used for personal, family,
+or household purposes, or (2) anything designed or sold for incorporation
+into a dwelling. In determining whether a product is a consumer product,
+doubtful cases shall be resolved in favor of coverage. For a particular
+product received by a particular user, "normally used" refers to a
+typical or common use of that class of product, regardless of the status
+of the particular user or of the way in which the particular user
+actually uses, or expects or is expected to use, the product. A product
+is a consumer product regardless of whether the product has substantial
+commercial, industrial or non-consumer uses, unless such uses represent
+the only significant mode of use of the product.
+
+ "Installation Information" for a User Product means any methods,
+procedures, authorization keys, or other information required to install
+and execute modified versions of a covered work in that User Product from
+a modified version of its Corresponding Source. The information must
+suffice to ensure that the continued functioning of the modified object
+code is in no case prevented or interfered with solely because
+modification has been made.
+
+ If you convey an object code work under this section in, or with, or
+specifically for use in, a User Product, and the conveying occurs as
+part of a transaction in which the right of possession and use of the
+User Product is transferred to the recipient in perpetuity or for a
+fixed term (regardless of how the transaction is characterized), the
+Corresponding Source conveyed under this section must be accompanied
+by the Installation Information. But this requirement does not apply
+if neither you nor any third party retains the ability to install
+modified object code on the User Product (for example, the work has
+been installed in ROM).
+
+ The requirement to provide Installation Information does not include a
+requirement to continue to provide support service, warranty, or updates
+for a work that has been modified or installed by the recipient, or for
+the User Product in which it has been modified or installed. Access to a
+network may be denied when the modification itself materially and
+adversely affects the operation of the network or violates the rules and
+protocols for communication across the network.
+
+ Corresponding Source conveyed, and Installation Information provided,
+in accord with this section must be in a format that is publicly
+documented (and with an implementation available to the public in
+source code form), and must require no special password or key for
+unpacking, reading or copying.
+
+ 7. Additional Terms.
+
+ "Additional permissions" are terms that supplement the terms of this
+License by making exceptions from one or more of its conditions.
+Additional permissions that are applicable to the entire Program shall
+be treated as though they were included in this License, to the extent
+that they are valid under applicable law. If additional permissions
+apply only to part of the Program, that part may be used separately
+under those permissions, but the entire Program remains governed by
+this License without regard to the additional permissions.
+
+ When you convey a copy of a covered work, you may at your option
+remove any additional permissions from that copy, or from any part of
+it. (Additional permissions may be written to require their own
+removal in certain cases when you modify the work.) You may place
+additional permissions on material, added by you to a covered work,
+for which you have or can give appropriate copyright permission.
+
+ Notwithstanding any other provision of this License, for material you
+add to a covered work, you may (if authorized by the copyright holders of
+that material) supplement the terms of this License with terms:
+
+ a) Disclaiming warranty or limiting liability differently from the
+ terms of sections 15 and 16 of this License; or
+
+ b) Requiring preservation of specified reasonable legal notices or
+ author attributions in that material or in the Appropriate Legal
+ Notices displayed by works containing it; or
+
+ c) Prohibiting misrepresentation of the origin of that material, or
+ requiring that modified versions of such material be marked in
+ reasonable ways as different from the original version; or
+
+ d) Limiting the use for publicity purposes of names of licensors or
+ authors of the material; or
+
+ e) Declining to grant rights under trademark law for use of some
+ trade names, trademarks, or service marks; or
+
+ f) Requiring indemnification of licensors and authors of that
+ material by anyone who conveys the material (or modified versions of
+ it) with contractual assumptions of liability to the recipient, for
+ any liability that these contractual assumptions directly impose on
+ those licensors and authors.
+
+ All other non-permissive additional terms are considered "further
+restrictions" within the meaning of section 10. If the Program as you
+received it, or any part of it, contains a notice stating that it is
+governed by this License along with a term that is a further
+restriction, you may remove that term. If a license document contains
+a further restriction but permits relicensing or conveying under this
+License, you may add to a covered work material governed by the terms
+of that license document, provided that the further restriction does
+not survive such relicensing or conveying.
+
+ If you add terms to a covered work in accord with this section, you
+must place, in the relevant source files, a statement of the
+additional terms that apply to those files, or a notice indicating
+where to find the applicable terms.
+
+ Additional terms, permissive or non-permissive, may be stated in the
+form of a separately written license, or stated as exceptions;
+the above requirements apply either way.
+
+ 8. Termination.
+
+ You may not propagate or modify a covered work except as expressly
+provided under this License. Any attempt otherwise to propagate or
+modify it is void, and will automatically terminate your rights under
+this License (including any patent licenses granted under the third
+paragraph of section 11).
+
+ However, if you cease all violation of this License, then your
+license from a particular copyright holder is reinstated (a)
+provisionally, unless and until the copyright holder explicitly and
+finally terminates your license, and (b) permanently, if the copyright
+holder fails to notify you of the violation by some reasonable means
+prior to 60 days after the cessation.
+
+ Moreover, your license from a particular copyright holder is
+reinstated permanently if the copyright holder notifies you of the
+violation by some reasonable means, this is the first time you have
+received notice of violation of this License (for any work) from that
+copyright holder, and you cure the violation prior to 30 days after
+your receipt of the notice.
+
+ Termination of your rights under this section does not terminate the
+licenses of parties who have received copies or rights from you under
+this License. If your rights have been terminated and not permanently
+reinstated, you do not qualify to receive new licenses for the same
+material under section 10.
+
+ 9. Acceptance Not Required for Having Copies.
+
+ You are not required to accept this License in order to receive or
+run a copy of the Program. Ancillary propagation of a covered work
+occurring solely as a consequence of using peer-to-peer transmission
+to receive a copy likewise does not require acceptance. However,
+nothing other than this License grants you permission to propagate or
+modify any covered work. These actions infringe copyright if you do
+not accept this License. Therefore, by modifying or propagating a
+covered work, you indicate your acceptance of this License to do so.
+
+ 10. Automatic Licensing of Downstream Recipients.
+
+ Each time you convey a covered work, the recipient automatically
+receives a license from the original licensors, to run, modify and
+propagate that work, subject to this License. You are not responsible
+for enforcing compliance by third parties with this License.
+
+ An "entity transaction" is a transaction transferring control of an
+organization, or substantially all assets of one, or subdividing an
+organization, or merging organizations. If propagation of a covered
+work results from an entity transaction, each party to that
+transaction who receives a copy of the work also receives whatever
+licenses to the work the party's predecessor in interest had or could
+give under the previous paragraph, plus a right to possession of the
+Corresponding Source of the work from the predecessor in interest, if
+the predecessor has it or can get it with reasonable efforts.
+
+ You may not impose any further restrictions on the exercise of the
+rights granted or affirmed under this License. For example, you may
+not impose a license fee, royalty, or other charge for exercise of
+rights granted under this License, and you may not initiate litigation
+(including a cross-claim or counterclaim in a lawsuit) alleging that
+any patent claim is infringed by making, using, selling, offering for
+sale, or importing the Program or any portion of it.
+
+ 11. Patents.
+
+ A "contributor" is a copyright holder who authorizes use under this
+License of the Program or a work on which the Program is based. The
+work thus licensed is called the contributor's "contributor version".
+
+ A contributor's "essential patent claims" are all patent claims
+owned or controlled by the contributor, whether already acquired or
+hereafter acquired, that would be infringed by some manner, permitted
+by this License, of making, using, or selling its contributor version,
+but do not include claims that would be infringed only as a
+consequence of further modification of the contributor version. For
+purposes of this definition, "control" includes the right to grant
+patent sublicenses in a manner consistent with the requirements of
+this License.
+
+ Each contributor grants you a non-exclusive, worldwide, royalty-free
+patent license under the contributor's essential patent claims, to
+make, use, sell, offer for sale, import and otherwise run, modify and
+propagate the contents of its contributor version.
+
+ In the following three paragraphs, a "patent license" is any express
+agreement or commitment, however denominated, not to enforce a patent
+(such as an express permission to practice a patent or covenant not to
+sue for patent infringement). To "grant" such a patent license to a
+party means to make such an agreement or commitment not to enforce a
+patent against the party.
+
+ If you convey a covered work, knowingly relying on a patent license,
+and the Corresponding Source of the work is not available for anyone
+to copy, free of charge and under the terms of this License, through a
+publicly available network server or other readily accessible means,
+then you must either (1) cause the Corresponding Source to be so
+available, or (2) arrange to deprive yourself of the benefit of the
+patent license for this particular work, or (3) arrange, in a manner
+consistent with the requirements of this License, to extend the patent
+license to downstream recipients. "Knowingly relying" means you have
+actual knowledge that, but for the patent license, your conveying the
+covered work in a country, or your recipient's use of the covered work
+in a country, would infringe one or more identifiable patents in that
+country that you have reason to believe are valid.
+
+ If, pursuant to or in connection with a single transaction or
+arrangement, you convey, or propagate by procuring conveyance of, a
+covered work, and grant a patent license to some of the parties
+receiving the covered work authorizing them to use, propagate, modify
+or convey a specific copy of the covered work, then the patent license
+you grant is automatically extended to all recipients of the covered
+work and works based on it.
+
+ A patent license is "discriminatory" if it does not include within
+the scope of its coverage, prohibits the exercise of, or is
+conditioned on the non-exercise of one or more of the rights that are
+specifically granted under this License. You may not convey a covered
+work if you are a party to an arrangement with a third party that is
+in the business of distributing software, under which you make payment
+to the third party based on the extent of your activity of conveying
+the work, and under which the third party grants, to any of the
+parties who would receive the covered work from you, a discriminatory
+patent license (a) in connection with copies of the covered work
+conveyed by you (or copies made from those copies), or (b) primarily
+for and in connection with specific products or compilations that
+contain the covered work, unless you entered into that arrangement,
+or that patent license was granted, prior to 28 March 2007.
+
+ Nothing in this License shall be construed as excluding or limiting
+any implied license or other defenses to infringement that may
+otherwise be available to you under applicable patent law.
+
+ 12. No Surrender of Others' Freedom.
+
+ If conditions are imposed on you (whether by court order, agreement or
+otherwise) that contradict the conditions of this License, they do not
+excuse you from the conditions of this License. If you cannot convey a
+covered work so as to satisfy simultaneously your obligations under this
+License and any other pertinent obligations, then as a consequence you may
+not convey it at all. For example, if you agree to terms that obligate you
+to collect a royalty for further conveying from those to whom you convey
+the Program, the only way you could satisfy both those terms and this
+License would be to refrain entirely from conveying the Program.
+
+ 13. Use with the GNU Affero General Public License.
+
+ Notwithstanding any other provision of this License, you have
+permission to link or combine any covered work with a work licensed
+under version 3 of the GNU Affero General Public License into a single
+combined work, and to convey the resulting work. The terms of this
+License will continue to apply to the part which is the covered work,
+but the special requirements of the GNU Affero General Public License,
+section 13, concerning interaction through a network will apply to the
+combination as such.
+
+ 14. Revised Versions of this License.
+
+ The Free Software Foundation may publish revised and/or new versions of
+the GNU General Public License from time to time. Such new versions will
+be similar in spirit to the present version, but may differ in detail to
+address new problems or concerns.
+
+ Each version is given a distinguishing version number. If the
+Program specifies that a certain numbered version of the GNU General
+Public License "or any later version" applies to it, you have the
+option of following the terms and conditions either of that numbered
+version or of any later version published by the Free Software
+Foundation. If the Program does not specify a version number of the
+GNU General Public License, you may choose any version ever published
+by the Free Software Foundation.
+
+ If the Program specifies that a proxy can decide which future
+versions of the GNU General Public License can be used, that proxy's
+public statement of acceptance of a version permanently authorizes you
+to choose that version for the Program.
+
+ Later license versions may give you additional or different
+permissions. However, no additional obligations are imposed on any
+author or copyright holder as a result of your choosing to follow a
+later version.
+
+ 15. Disclaimer of Warranty.
+
+ THERE IS NO WARRANTY FOR THE PROGRAM, TO THE EXTENT PERMITTED BY
+APPLICABLE LAW. EXCEPT WHEN OTHERWISE STATED IN WRITING THE COPYRIGHT
+HOLDERS AND/OR OTHER PARTIES PROVIDE THE PROGRAM "AS IS" WITHOUT WARRANTY
+OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING, BUT NOT LIMITED TO,
+THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
+PURPOSE. THE ENTIRE RISK AS TO THE QUALITY AND PERFORMANCE OF THE PROGRAM
+IS WITH YOU. SHOULD THE PROGRAM PROVE DEFECTIVE, YOU ASSUME THE COST OF
+ALL NECESSARY SERVICING, REPAIR OR CORRECTION.
+
+ 16. Limitation of Liability.
+
+ IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW OR AGREED TO IN WRITING
+WILL ANY COPYRIGHT HOLDER, OR ANY OTHER PARTY WHO MODIFIES AND/OR CONVEYS
+THE PROGRAM AS PERMITTED ABOVE, BE LIABLE TO YOU FOR DAMAGES, INCLUDING ANY
+GENERAL, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING OUT OF THE
+USE OR INABILITY TO USE THE PROGRAM (INCLUDING BUT NOT LIMITED TO LOSS OF
+DATA OR DATA BEING RENDERED INACCURATE OR LOSSES SUSTAINED BY YOU OR THIRD
+PARTIES OR A FAILURE OF THE PROGRAM TO OPERATE WITH ANY OTHER PROGRAMS),
+EVEN IF SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE POSSIBILITY OF
+SUCH DAMAGES.
+
+ 17. Interpretation of Sections 15 and 16.
+
+ If the disclaimer of warranty and limitation of liability provided
+above cannot be given local legal effect according to their terms,
+reviewing courts shall apply local law that most closely approximates
+an absolute waiver of all civil liability in connection with the
+Program, unless a warranty or assumption of liability accompanies a
+copy of the Program in return for a fee.
+
+ END OF TERMS AND CONDITIONS
+
+ How to Apply These Terms to Your New Programs
+
+ If you develop a new program, and you want it to be of the greatest
+possible use to the public, the best way to achieve this is to make it
+free software which everyone can redistribute and change under these terms.
+
+ To do so, attach the following notices to the program. It is safest
+to attach them to the start of each source file to most effectively
+state the exclusion of warranty; and each file should have at least
+the "copyright" line and a pointer to where the full notice is found.
+
+
+ Copyright (C)
+
+ This program is free software: you can redistribute it and/or modify
+ it under the terms of the GNU General Public License as published by
+ the Free Software Foundation, either version 3 of the License, or
+ (at your option) any later version.
+
+ This program is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
+ GNU General Public License for more details.
+
+ You should have received a copy of the GNU General Public License
+ along with this program. If not, see .
+
+Also add information on how to contact you by electronic and paper mail.
+
+ If the program does terminal interaction, make it output a short
+notice like this when it starts in an interactive mode:
+
+ Copyright (C)
+ This program comes with ABSOLUTELY NO WARRANTY; for details type `show w'.
+ This is free software, and you are welcome to redistribute it
+ under certain conditions; type `show c' for details.
+
+The hypothetical commands `show w' and `show c' should show the appropriate
+parts of the General Public License. Of course, your program's commands
+might be different; for a GUI interface, you would use an "about box".
+
+ You should also get your employer (if you work as a programmer) or school,
+if any, to sign a "copyright disclaimer" for the program, if necessary.
+For more information on this, and how to apply and follow the GNU GPL, see
+.
+
+ The GNU General Public License does not permit incorporating your program
+into proprietary programs. If your program is a subroutine library, you
+may consider it more useful to permit linking proprietary applications with
+the library. If this is what you want to do, use the GNU Lesser General
+Public License instead of this License. But first, please read
+.
diff --git a/yolov7_seg/det/README.md b/yolov7_seg/det/README.md
new file mode 100644
index 000000000..522f10543
--- /dev/null
+++ b/yolov7_seg/det/README.md
@@ -0,0 +1,7 @@
+# yolov7
+
+Implementation of "YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors"
+
+This implimentation is based on [yolov5](https://github.com/ultralytics/yolov5).
+
+All of installation, data preparation, and usage are as same as yolov5.
diff --git a/yolov7_seg/det/classify/predict.py b/yolov7_seg/det/classify/predict.py
new file mode 100644
index 000000000..fe7984464
--- /dev/null
+++ b/yolov7_seg/det/classify/predict.py
@@ -0,0 +1,109 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run classification inference on images
+
+Usage:
+ $ python classify/predict.py --weights yolov5s-cls.pt --source im.jpg
+"""
+
+import argparse
+import os
+import sys
+from pathlib import Path
+
+import cv2
+import torch.nn.functional as F
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from classify.train import imshow_cls
+from models.common import DetectMultiBackend
+from utils.augmentations import classify_transforms
+from utils.general import LOGGER, check_requirements, colorstr, increment_path, print_args
+from utils.torch_utils import select_device, smart_inference_mode, time_sync
+
+
+@smart_inference_mode()
+def run(
+ weights=ROOT / 'yolov5s-cls.pt', # model.pt path(s)
+ source=ROOT / 'data/images/bus.jpg', # file/dir/URL/glob, 0 for webcam
+ imgsz=224, # inference size
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ show=True,
+ project=ROOT / 'runs/predict-cls', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+):
+ file = str(source)
+ seen, dt = 1, [0.0, 0.0, 0.0]
+ device = select_device(device)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ save_dir.mkdir(parents=True, exist_ok=True) # make dir
+
+ # Transforms
+ transforms = classify_transforms(imgsz)
+
+ # Load model
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, fp16=half)
+ model.warmup(imgsz=(1, 3, imgsz, imgsz)) # warmup
+
+ # Image
+ t1 = time_sync()
+ im = cv2.cvtColor(cv2.imread(file), cv2.COLOR_BGR2RGB)
+ im = transforms(im).unsqueeze(0).to(device)
+ im = im.half() if model.fp16 else im.float()
+ t2 = time_sync()
+ dt[0] += t2 - t1
+
+ # Inference
+ results = model(im)
+ t3 = time_sync()
+ dt[1] += t3 - t2
+
+ p = F.softmax(results, dim=1) # probabilities
+ i = p.argsort(1, descending=True)[:, :5].squeeze() # top 5 indices
+ dt[2] += time_sync() - t3
+ LOGGER.info(f"image 1/1 {file}: {imgsz}x{imgsz} {', '.join(f'{model.names[j]} {p[0, j]:.2f}' for j in i)}")
+
+ # Print results
+ t = tuple(x / seen * 1E3 for x in dt) # speeds per image
+ shape = (1, 3, imgsz, imgsz)
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms post-process per image at shape {shape}' % t)
+ if show:
+ imshow_cls(im, f=save_dir / Path(file).name, verbose=True)
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}")
+ return p
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s-cls.pt', help='model path(s)')
+ parser.add_argument('--source', type=str, default=ROOT / 'data/images/bus.jpg', help='file')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=224, help='train, val image size (pixels)')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ parser.add_argument('--project', default=ROOT / 'runs/predict-cls', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ #check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/det/classify/train.py b/yolov7_seg/det/classify/train.py
new file mode 100644
index 000000000..0398ad304
--- /dev/null
+++ b/yolov7_seg/det/classify/train.py
@@ -0,0 +1,325 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Train a YOLOv5 classifier model on a classification dataset
+Datasets: --data mnist, fashion-mnist, cifar10, cifar100, imagenette, imagewoof, imagenet, or 'path/to/custom/dataset'
+
+Usage:
+ $ python classify/train.py --model yolov5s-cls.pt --data cifar100 --epochs 5 --img 128
+ $ python -m torch.distributed.run --nproc_per_node 4 --master_port 1 classify/train.py --model yolov5s-cls.pt --data imagenet --epochs 5 --img 224 --device 0,1,2,3
+"""
+
+import argparse
+import os
+import subprocess
+import sys
+import time
+from copy import deepcopy
+from datetime import datetime
+from pathlib import Path
+
+import torch
+import torch.distributed as dist
+import torch.hub as hub
+import torch.optim.lr_scheduler as lr_scheduler
+import torchvision
+from torch.cuda import amp
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from classify import val as validate
+from models.experimental import attempt_load
+from models.yolo import ClassificationModel, DetectionModel
+from utils.dataloaders import create_classification_dataloader
+from utils.general import (DATASETS_DIR, LOGGER, WorkingDirectory, check_git_status, check_requirements, colorstr,
+ download, increment_path, init_seeds, print_args, yaml_save)
+from utils.loggers import GenericLogger
+from utils.plots import imshow_cls
+from utils.torch_utils import (ModelEMA, model_info, reshape_classifier_output, select_device, smart_DDP,
+ smart_optimizer, smartCrossEntropyLoss, torch_distributed_zero_first)
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+
+def train(opt, device):
+ init_seeds(opt.seed + 1 + RANK, deterministic=True)
+ save_dir, data, bs, epochs, nw, imgsz, pretrained = \
+ opt.save_dir, Path(opt.data), opt.batch_size, opt.epochs, min(os.cpu_count() - 1, opt.workers), \
+ opt.imgsz, str(opt.pretrained).lower() == 'true'
+ cuda = device.type != 'cpu'
+
+ # Directories
+ wdir = save_dir / 'weights'
+ wdir.mkdir(parents=True, exist_ok=True) # make dir
+ last, best = wdir / 'last.pt', wdir / 'best.pt'
+
+ # Save run settings
+ yaml_save(save_dir / 'opt.yaml', vars(opt))
+
+ # Logger
+ logger = GenericLogger(opt=opt, console_logger=LOGGER) if RANK in {-1, 0} else None
+
+ # Download Dataset
+ with torch_distributed_zero_first(LOCAL_RANK), WorkingDirectory(ROOT):
+ data_dir = data if data.is_dir() else (DATASETS_DIR / data)
+ if not data_dir.is_dir():
+ LOGGER.info(f'\nDataset not found ⚠️, missing path {data_dir}, attempting download...')
+ t = time.time()
+ if str(data) == 'imagenet':
+ subprocess.run(f"bash {ROOT / 'data/scripts/get_imagenet.sh'}", shell=True, check=True)
+ else:
+ url = f'https://github.com/ultralytics/yolov5/releases/download/v1.0/{data}.zip'
+ download(url, dir=data_dir.parent)
+ s = f"Dataset download success ✅ ({time.time() - t:.1f}s), saved to {colorstr('bold', data_dir)}\n"
+ LOGGER.info(s)
+
+ # Dataloaders
+ nc = len([x for x in (data_dir / 'train').glob('*') if x.is_dir()]) # number of classes
+ trainloader = create_classification_dataloader(path=data_dir / 'train',
+ imgsz=imgsz,
+ batch_size=bs // WORLD_SIZE,
+ augment=True,
+ cache=opt.cache,
+ rank=LOCAL_RANK,
+ workers=nw)
+
+ test_dir = data_dir / 'test' if (data_dir / 'test').exists() else data_dir / 'val' # data/test or data/val
+ if RANK in {-1, 0}:
+ testloader = create_classification_dataloader(path=test_dir,
+ imgsz=imgsz,
+ batch_size=bs // WORLD_SIZE * 2,
+ augment=False,
+ cache=opt.cache,
+ rank=-1,
+ workers=nw)
+
+ # Model
+ with torch_distributed_zero_first(LOCAL_RANK), WorkingDirectory(ROOT):
+ if Path(opt.model).is_file() or opt.model.endswith('.pt'):
+ model = attempt_load(opt.model, device='cpu', fuse=False)
+ elif opt.model in torchvision.models.__dict__: # TorchVision models i.e. resnet50, efficientnet_b0
+ model = torchvision.models.__dict__[opt.model](weights='IMAGENET1K_V1' if pretrained else None)
+ else:
+ m = hub.list('ultralytics/yolov5') # + hub.list('pytorch/vision') # models
+ raise ModuleNotFoundError(f'--model {opt.model} not found. Available models are: \n' + '\n'.join(m))
+ if isinstance(model, DetectionModel):
+ LOGGER.warning("WARNING: pass YOLOv5 classifier model with '-cls' suffix, i.e. '--model yolov5s-cls.pt'")
+ model = ClassificationModel(model=model, nc=nc, cutoff=opt.cutoff or 10) # convert to classification model
+ reshape_classifier_output(model, nc) # update class count
+ for p in model.parameters():
+ p.requires_grad = True # for training
+ for m in model.modules():
+ if not pretrained and hasattr(m, 'reset_parameters'):
+ m.reset_parameters()
+ if isinstance(m, torch.nn.Dropout) and opt.dropout is not None:
+ m.p = opt.dropout # set dropout
+ model = model.to(device)
+ names = trainloader.dataset.classes # class names
+ model.names = names # attach class names
+
+ # Info
+ if RANK in {-1, 0}:
+ model_info(model)
+ if opt.verbose:
+ LOGGER.info(model)
+ images, labels = next(iter(trainloader))
+ file = imshow_cls(images[:25], labels[:25], names=names, f=save_dir / 'train_images.jpg')
+ logger.log_images(file, name='Train Examples')
+ logger.log_graph(model, imgsz) # log model
+
+ # Optimizer
+ optimizer = smart_optimizer(model, opt.optimizer, opt.lr0, momentum=0.9, decay=5e-5)
+
+ # Scheduler
+ lrf = 0.01 # final lr (fraction of lr0)
+ # lf = lambda x: ((1 + math.cos(x * math.pi / epochs)) / 2) * (1 - lrf) + lrf # cosine
+ lf = lambda x: (1 - x / epochs) * (1 - lrf) + lrf # linear
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
+ # scheduler = lr_scheduler.OneCycleLR(optimizer, max_lr=lr0, total_steps=epochs, pct_start=0.1,
+ # final_div_factor=1 / 25 / lrf)
+
+ # EMA
+ ema = ModelEMA(model) if RANK in {-1, 0} else None
+
+ # DDP mode
+ if cuda and RANK != -1:
+ model = smart_DDP(model)
+
+ # Train
+ t0 = time.time()
+ criterion = smartCrossEntropyLoss(label_smoothing=opt.label_smoothing) # loss function
+ best_fitness = 0.0
+ scaler = amp.GradScaler(enabled=cuda)
+ val = test_dir.stem # 'val' or 'test'
+ LOGGER.info(f'Image sizes {imgsz} train, {imgsz} test\n'
+ f'Using {nw * WORLD_SIZE} dataloader workers\n'
+ f"Logging results to {colorstr('bold', save_dir)}\n"
+ f'Starting {opt.model} training on {data} dataset with {nc} classes for {epochs} epochs...\n\n'
+ f"{'Epoch':>10}{'GPU_mem':>10}{'train_loss':>12}{f'{val}_loss':>12}{'top1_acc':>12}{'top5_acc':>12}")
+ for epoch in range(epochs): # loop over the dataset multiple times
+ tloss, vloss, fitness = 0.0, 0.0, 0.0 # train loss, val loss, fitness
+ model.train()
+ if RANK != -1:
+ trainloader.sampler.set_epoch(epoch)
+ pbar = enumerate(trainloader)
+ if RANK in {-1, 0}:
+ pbar = tqdm(enumerate(trainloader), total=len(trainloader), bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}')
+ for i, (images, labels) in pbar: # progress bar
+ images, labels = images.to(device, non_blocking=True), labels.to(device)
+
+ # Forward
+ with amp.autocast(enabled=cuda): # stability issues when enabled
+ loss = criterion(model(images), labels)
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize
+ scaler.unscale_(optimizer) # unscale gradients
+ torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=10.0) # clip gradients
+ scaler.step(optimizer)
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+
+ if RANK in {-1, 0}:
+ # Print
+ tloss = (tloss * i + loss.item()) / (i + 1) # update mean losses
+ mem = '%.3gG' % (torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0) # (GB)
+ pbar.desc = f"{f'{epoch + 1}/{epochs}':>10}{mem:>10}{tloss:>12.3g}" + ' ' * 36
+
+ # Test
+ if i == len(pbar) - 1: # last batch
+ top1, top5, vloss = validate.run(model=ema.ema,
+ dataloader=testloader,
+ criterion=criterion,
+ pbar=pbar) # test accuracy, loss
+ fitness = top1 # define fitness as top1 accuracy
+
+ # Scheduler
+ scheduler.step()
+
+ # Log metrics
+ if RANK in {-1, 0}:
+ # Best fitness
+ if fitness > best_fitness:
+ best_fitness = fitness
+
+ # Log
+ metrics = {
+ "train/loss": tloss,
+ f"{val}/loss": vloss,
+ "metrics/accuracy_top1": top1,
+ "metrics/accuracy_top5": top5,
+ "lr/0": optimizer.param_groups[0]['lr']} # learning rate
+ logger.log_metrics(metrics, epoch)
+
+ # Save model
+ final_epoch = epoch + 1 == epochs
+ if (not opt.nosave) or final_epoch:
+ ckpt = {
+ 'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'model': deepcopy(ema.ema).half(), # deepcopy(de_parallel(model)).half(),
+ 'ema': None, # deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': None, # optimizer.state_dict(),
+ 'opt': vars(opt),
+ 'date': datetime.now().isoformat()}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fitness:
+ torch.save(ckpt, best)
+ del ckpt
+
+ # Train complete
+ if RANK in {-1, 0} and final_epoch:
+ LOGGER.info(f'\nTraining complete ({(time.time() - t0) / 3600:.3f} hours)'
+ f"\nResults saved to {colorstr('bold', save_dir)}"
+ f"\nPredict: python classify/predict.py --weights {best} --source im.jpg"
+ f"\nValidate: python classify/val.py --weights {best} --data {data_dir}"
+ f"\nExport: python export.py --weights {best} --include onnx"
+ f"\nPyTorch Hub: model = torch.hub.load('ultralytics/yolov5', 'custom', '{best}')"
+ f"\nVisualize: https://netron.app\n")
+
+ # Plot examples
+ images, labels = (x[:25] for x in next(iter(testloader))) # first 25 images and labels
+ pred = torch.max(ema.ema((images.half() if cuda else images.float()).to(device)), 1)[1]
+ file = imshow_cls(images, labels, pred, names, verbose=False, f=save_dir / 'test_images.jpg')
+
+ # Log results
+ meta = {"epochs": epochs, "top1_acc": best_fitness, "date": datetime.now().isoformat()}
+ logger.log_images(file, name='Test Examples (true-predicted)', epoch=epoch)
+ logger.log_model(best, epochs, metadata=meta)
+
+
+def parse_opt(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--model', type=str, default='yolov5s-cls.pt', help='initial weights path')
+ parser.add_argument('--data', type=str, default='mnist', help='cifar10, cifar100, mnist, imagenet, etc.')
+ parser.add_argument('--epochs', type=int, default=10)
+ parser.add_argument('--batch-size', type=int, default=64, help='total batch size for all GPUs')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=128, help='train, val image size (pixels)')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default=ROOT / 'runs/train-cls', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--pretrained', nargs='?', const=True, default=True, help='start from i.e. --pretrained False')
+ parser.add_argument('--optimizer', choices=['SGD', 'Adam', 'AdamW', 'RMSProp'], default='Adam', help='optimizer')
+ parser.add_argument('--lr0', type=float, default=0.001, help='initial learning rate')
+ parser.add_argument('--label-smoothing', type=float, default=0.1, help='Label smoothing epsilon')
+ parser.add_argument('--cutoff', type=int, default=None, help='Model layer cutoff index for Classify() head')
+ parser.add_argument('--dropout', type=float, default=None, help='Dropout (fraction)')
+ parser.add_argument('--verbose', action='store_true', help='Verbose mode')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def main(opt):
+ # Checks
+ if RANK in {-1, 0}:
+ print_args(vars(opt))
+ #check_git_status()
+ #check_requirements()
+
+ # DDP mode
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if LOCAL_RANK != -1:
+ assert opt.batch_size != -1, 'AutoBatch is coming soon for classification, please pass a valid --batch-size'
+ assert opt.batch_size % WORLD_SIZE == 0, f'--batch-size {opt.batch_size} must be multiple of WORLD_SIZE'
+ assert torch.cuda.device_count() > LOCAL_RANK, 'insufficient CUDA devices for DDP command'
+ torch.cuda.set_device(LOCAL_RANK)
+ device = torch.device('cuda', LOCAL_RANK)
+ dist.init_process_group(backend="nccl" if dist.is_nccl_available() else "gloo")
+
+ # Parameters
+ opt.save_dir = increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok) # increment run
+
+ # Train
+ train(opt, device)
+
+
+def run(**kwargs):
+ # Usage: from yolov5 import classify; classify.train.run(data=mnist, imgsz=320, model='yolov5m')
+ opt = parse_opt(True)
+ for k, v in kwargs.items():
+ setattr(opt, k, v)
+ main(opt)
+ return opt
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/det/classify/val.py b/yolov7_seg/det/classify/val.py
new file mode 100644
index 000000000..0a784bc97
--- /dev/null
+++ b/yolov7_seg/det/classify/val.py
@@ -0,0 +1,158 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a classification model on a dataset
+
+Usage:
+ $ python classify/val.py --weights yolov5s-cls.pt --data ../datasets/imagenet
+"""
+
+import argparse
+import os
+import sys
+from pathlib import Path
+
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.dataloaders import create_classification_dataloader
+from utils.general import LOGGER, check_img_size, check_requirements, colorstr, increment_path, print_args
+from utils.torch_utils import select_device, smart_inference_mode, time_sync
+
+
+@smart_inference_mode()
+def run(
+ data=ROOT / '../datasets/mnist', # dataset dir
+ weights=ROOT / 'yolov5s-cls.pt', # model.pt path(s)
+ batch_size=128, # batch size
+ imgsz=224, # inference size (pixels)
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ workers=8, # max dataloader workers (per RANK in DDP mode)
+ verbose=False, # verbose output
+ project=ROOT / 'runs/val-cls', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=True, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ model=None,
+ dataloader=None,
+ criterion=None,
+ pbar=None,
+):
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ model.half() if half else model.float()
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ save_dir.mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ if engine:
+ batch_size = model.batch_size
+ else:
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
+
+ # Dataloader
+ data = Path(data)
+ test_dir = data / 'test' if (data / 'test').exists() else data / 'val' # data/test or data/val
+ dataloader = create_classification_dataloader(path=test_dir,
+ imgsz=imgsz,
+ batch_size=batch_size,
+ augment=False,
+ rank=-1,
+ workers=workers)
+
+ model.eval()
+ pred, targets, loss, dt = [], [], 0, [0.0, 0.0, 0.0]
+ n = len(dataloader) # number of batches
+ action = 'validating' if dataloader.dataset.root.stem == 'val' else 'testing'
+ desc = f"{pbar.desc[:-36]}{action:>36}" if pbar else f"{action}"
+ bar = tqdm(dataloader, desc, n, not training, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}', position=0)
+ with torch.cuda.amp.autocast(enabled=device.type != 'cpu'):
+ for images, labels in bar:
+ t1 = time_sync()
+ images, labels = images.to(device, non_blocking=True), labels.to(device)
+ t2 = time_sync()
+ dt[0] += t2 - t1
+
+ y = model(images)
+ t3 = time_sync()
+ dt[1] += t3 - t2
+
+ pred.append(y.argsort(1, descending=True)[:, :5])
+ targets.append(labels)
+ if criterion:
+ loss += criterion(y, labels)
+ dt[2] += time_sync() - t3
+
+ loss /= n
+ pred, targets = torch.cat(pred), torch.cat(targets)
+ correct = (targets[:, None] == pred).float()
+ acc = torch.stack((correct[:, 0], correct.max(1).values), dim=1) # (top1, top5) accuracy
+ top1, top5 = acc.mean(0).tolist()
+
+ if pbar:
+ pbar.desc = f"{pbar.desc[:-36]}{loss:>12.3g}{top1:>12.3g}{top5:>12.3g}"
+ if verbose: # all classes
+ LOGGER.info(f"{'Class':>24}{'Images':>12}{'top1_acc':>12}{'top5_acc':>12}")
+ LOGGER.info(f"{'all':>24}{targets.shape[0]:>12}{top1:>12.3g}{top5:>12.3g}")
+ for i, c in enumerate(model.names):
+ aci = acc[targets == i]
+ top1i, top5i = aci.mean(0).tolist()
+ LOGGER.info(f"{c:>24}{aci.shape[0]:>12}{top1i:>12.3g}{top5i:>12.3g}")
+
+ # Print results
+ t = tuple(x / len(dataloader.dataset.samples) * 1E3 for x in dt) # speeds per image
+ shape = (1, 3, imgsz, imgsz)
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms post-process per image at shape {shape}' % t)
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}")
+
+ return top1, top5, loss
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / '../datasets/mnist', help='dataset path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s-cls.pt', help='model.pt path(s)')
+ parser.add_argument('--batch-size', type=int, default=128, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=224, help='inference size (pixels)')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--verbose', nargs='?', const=True, default=True, help='verbose output')
+ parser.add_argument('--project', default=ROOT / 'runs/val-cls', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ #check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/det/data/ImageNet.yaml b/yolov7_seg/det/data/ImageNet.yaml
new file mode 100644
index 000000000..2a1644664
--- /dev/null
+++ b/yolov7_seg/det/data/ImageNet.yaml
@@ -0,0 +1,156 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# ImageNet-1k dataset https://www.image-net.org/index.php by Stanford University
+# Simplified class names from https://github.com/anishathalye/imagenet-simple-labels
+# Example usage: python classify/train.py --data imagenet
+# parent
+# ├── yolov5
+# └── datasets
+# └── imagenet ← downloads here (144 GB)
+
+
+# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
+path: ../datasets/imagenet # dataset root dir
+train: train # train images (relative to 'path') 1281167 images
+val: val # val images (relative to 'path') 50000 images
+test: # test images (optional)
+
+# Classes
+nc: 1000 # number of classes
+names: ['tench', 'goldfish', 'great white shark', 'tiger shark', 'hammerhead shark', 'electric ray', 'stingray', 'cock',
+ 'hen', 'ostrich', 'brambling', 'goldfinch', 'house finch', 'junco', 'indigo bunting', 'American robin',
+ 'bulbul', 'jay', 'magpie', 'chickadee', 'American dipper', 'kite', 'bald eagle', 'vulture', 'great grey owl',
+ 'fire salamander', 'smooth newt', 'newt', 'spotted salamander', 'axolotl', 'American bullfrog', 'tree frog',
+ 'tailed frog', 'loggerhead sea turtle', 'leatherback sea turtle', 'mud turtle', 'terrapin', 'box turtle',
+ 'banded gecko', 'green iguana', 'Carolina anole', 'desert grassland whiptail lizard', 'agama',
+ 'frilled-necked lizard', 'alligator lizard', 'Gila monster', 'European green lizard', 'chameleon',
+ 'Komodo dragon', 'Nile crocodile', 'American alligator', 'triceratops', 'worm snake', 'ring-necked snake',
+ 'eastern hog-nosed snake', 'smooth green snake', 'kingsnake', 'garter snake', 'water snake', 'vine snake',
+ 'night snake', 'boa constrictor', 'African rock python', 'Indian cobra', 'green mamba', 'sea snake',
+ 'Saharan horned viper', 'eastern diamondback rattlesnake', 'sidewinder', 'trilobite', 'harvestman', 'scorpion',
+ 'yellow garden spider', 'barn spider', 'European garden spider', 'southern black widow', 'tarantula',
+ 'wolf spider', 'tick', 'centipede', 'black grouse', 'ptarmigan', 'ruffed grouse', 'prairie grouse', 'peacock',
+ 'quail', 'partridge', 'grey parrot', 'macaw', 'sulphur-crested cockatoo', 'lorikeet', 'coucal', 'bee eater',
+ 'hornbill', 'hummingbird', 'jacamar', 'toucan', 'duck', 'red-breasted merganser', 'goose', 'black swan',
+ 'tusker', 'echidna', 'platypus', 'wallaby', 'koala', 'wombat', 'jellyfish', 'sea anemone', 'brain coral',
+ 'flatworm', 'nematode', 'conch', 'snail', 'slug', 'sea slug', 'chiton', 'chambered nautilus', 'Dungeness crab',
+ 'rock crab', 'fiddler crab', 'red king crab', 'American lobster', 'spiny lobster', 'crayfish', 'hermit crab',
+ 'isopod', 'white stork', 'black stork', 'spoonbill', 'flamingo', 'little blue heron', 'great egret', 'bittern',
+ 'crane (bird)', 'limpkin', 'common gallinule', 'American coot', 'bustard', 'ruddy turnstone', 'dunlin',
+ 'common redshank', 'dowitcher', 'oystercatcher', 'pelican', 'king penguin', 'albatross', 'grey whale',
+ 'killer whale', 'dugong', 'sea lion', 'Chihuahua', 'Japanese Chin', 'Maltese', 'Pekingese', 'Shih Tzu',
+ 'King Charles Spaniel', 'Papillon', 'toy terrier', 'Rhodesian Ridgeback', 'Afghan Hound', 'Basset Hound',
+ 'Beagle', 'Bloodhound', 'Bluetick Coonhound', 'Black and Tan Coonhound', 'Treeing Walker Coonhound',
+ 'English foxhound', 'Redbone Coonhound', 'borzoi', 'Irish Wolfhound', 'Italian Greyhound', 'Whippet',
+ 'Ibizan Hound', 'Norwegian Elkhound', 'Otterhound', 'Saluki', 'Scottish Deerhound', 'Weimaraner',
+ 'Staffordshire Bull Terrier', 'American Staffordshire Terrier', 'Bedlington Terrier', 'Border Terrier',
+ 'Kerry Blue Terrier', 'Irish Terrier', 'Norfolk Terrier', 'Norwich Terrier', 'Yorkshire Terrier',
+ 'Wire Fox Terrier', 'Lakeland Terrier', 'Sealyham Terrier', 'Airedale Terrier', 'Cairn Terrier',
+ 'Australian Terrier', 'Dandie Dinmont Terrier', 'Boston Terrier', 'Miniature Schnauzer', 'Giant Schnauzer',
+ 'Standard Schnauzer', 'Scottish Terrier', 'Tibetan Terrier', 'Australian Silky Terrier',
+ 'Soft-coated Wheaten Terrier', 'West Highland White Terrier', 'Lhasa Apso', 'Flat-Coated Retriever',
+ 'Curly-coated Retriever', 'Golden Retriever', 'Labrador Retriever', 'Chesapeake Bay Retriever',
+ 'German Shorthaired Pointer', 'Vizsla', 'English Setter', 'Irish Setter', 'Gordon Setter', 'Brittany',
+ 'Clumber Spaniel', 'English Springer Spaniel', 'Welsh Springer Spaniel', 'Cocker Spaniels', 'Sussex Spaniel',
+ 'Irish Water Spaniel', 'Kuvasz', 'Schipperke', 'Groenendael', 'Malinois', 'Briard', 'Australian Kelpie',
+ 'Komondor', 'Old English Sheepdog', 'Shetland Sheepdog', 'collie', 'Border Collie', 'Bouvier des Flandres',
+ 'Rottweiler', 'German Shepherd Dog', 'Dobermann', 'Miniature Pinscher', 'Greater Swiss Mountain Dog',
+ 'Bernese Mountain Dog', 'Appenzeller Sennenhund', 'Entlebucher Sennenhund', 'Boxer', 'Bullmastiff',
+ 'Tibetan Mastiff', 'French Bulldog', 'Great Dane', 'St. Bernard', 'husky', 'Alaskan Malamute', 'Siberian Husky',
+ 'Dalmatian', 'Affenpinscher', 'Basenji', 'pug', 'Leonberger', 'Newfoundland', 'Pyrenean Mountain Dog',
+ 'Samoyed', 'Pomeranian', 'Chow Chow', 'Keeshond', 'Griffon Bruxellois', 'Pembroke Welsh Corgi',
+ 'Cardigan Welsh Corgi', 'Toy Poodle', 'Miniature Poodle', 'Standard Poodle', 'Mexican hairless dog',
+ 'grey wolf', 'Alaskan tundra wolf', 'red wolf', 'coyote', 'dingo', 'dhole', 'African wild dog', 'hyena',
+ 'red fox', 'kit fox', 'Arctic fox', 'grey fox', 'tabby cat', 'tiger cat', 'Persian cat', 'Siamese cat',
+ 'Egyptian Mau', 'cougar', 'lynx', 'leopard', 'snow leopard', 'jaguar', 'lion', 'tiger', 'cheetah', 'brown bear',
+ 'American black bear', 'polar bear', 'sloth bear', 'mongoose', 'meerkat', 'tiger beetle', 'ladybug',
+ 'ground beetle', 'longhorn beetle', 'leaf beetle', 'dung beetle', 'rhinoceros beetle', 'weevil', 'fly', 'bee',
+ 'ant', 'grasshopper', 'cricket', 'stick insect', 'cockroach', 'mantis', 'cicada', 'leafhopper', 'lacewing',
+ 'dragonfly', 'damselfly', 'red admiral', 'ringlet', 'monarch butterfly', 'small white', 'sulphur butterfly',
+ 'gossamer-winged butterfly', 'starfish', 'sea urchin', 'sea cucumber', 'cottontail rabbit', 'hare',
+ 'Angora rabbit', 'hamster', 'porcupine', 'fox squirrel', 'marmot', 'beaver', 'guinea pig', 'common sorrel',
+ 'zebra', 'pig', 'wild boar', 'warthog', 'hippopotamus', 'ox', 'water buffalo', 'bison', 'ram', 'bighorn sheep',
+ 'Alpine ibex', 'hartebeest', 'impala', 'gazelle', 'dromedary', 'llama', 'weasel', 'mink', 'European polecat',
+ 'black-footed ferret', 'otter', 'skunk', 'badger', 'armadillo', 'three-toed sloth', 'orangutan', 'gorilla',
+ 'chimpanzee', 'gibbon', 'siamang', 'guenon', 'patas monkey', 'baboon', 'macaque', 'langur',
+ 'black-and-white colobus', 'proboscis monkey', 'marmoset', 'white-headed capuchin', 'howler monkey', 'titi',
+ "Geoffroy's spider monkey", 'common squirrel monkey', 'ring-tailed lemur', 'indri', 'Asian elephant',
+ 'African bush elephant', 'red panda', 'giant panda', 'snoek', 'eel', 'coho salmon', 'rock beauty', 'clownfish',
+ 'sturgeon', 'garfish', 'lionfish', 'pufferfish', 'abacus', 'abaya', 'academic gown', 'accordion',
+ 'acoustic guitar', 'aircraft carrier', 'airliner', 'airship', 'altar', 'ambulance', 'amphibious vehicle',
+ 'analog clock', 'apiary', 'apron', 'waste container', 'assault rifle', 'backpack', 'bakery', 'balance beam',
+ 'balloon', 'ballpoint pen', 'Band-Aid', 'banjo', 'baluster', 'barbell', 'barber chair', 'barbershop', 'barn',
+ 'barometer', 'barrel', 'wheelbarrow', 'baseball', 'basketball', 'bassinet', 'bassoon', 'swimming cap',
+ 'bath towel', 'bathtub', 'station wagon', 'lighthouse', 'beaker', 'military cap', 'beer bottle', 'beer glass',
+ 'bell-cot', 'bib', 'tandem bicycle', 'bikini', 'ring binder', 'binoculars', 'birdhouse', 'boathouse',
+ 'bobsleigh', 'bolo tie', 'poke bonnet', 'bookcase', 'bookstore', 'bottle cap', 'bow', 'bow tie', 'brass', 'bra',
+ 'breakwater', 'breastplate', 'broom', 'bucket', 'buckle', 'bulletproof vest', 'high-speed train',
+ 'butcher shop', 'taxicab', 'cauldron', 'candle', 'cannon', 'canoe', 'can opener', 'cardigan', 'car mirror',
+ 'carousel', 'tool kit', 'carton', 'car wheel', 'automated teller machine', 'cassette', 'cassette player',
+ 'castle', 'catamaran', 'CD player', 'cello', 'mobile phone', 'chain', 'chain-link fence', 'chain mail',
+ 'chainsaw', 'chest', 'chiffonier', 'chime', 'china cabinet', 'Christmas stocking', 'church', 'movie theater',
+ 'cleaver', 'cliff dwelling', 'cloak', 'clogs', 'cocktail shaker', 'coffee mug', 'coffeemaker', 'coil',
+ 'combination lock', 'computer keyboard', 'confectionery store', 'container ship', 'convertible', 'corkscrew',
+ 'cornet', 'cowboy boot', 'cowboy hat', 'cradle', 'crane (machine)', 'crash helmet', 'crate', 'infant bed',
+ 'Crock Pot', 'croquet ball', 'crutch', 'cuirass', 'dam', 'desk', 'desktop computer', 'rotary dial telephone',
+ 'diaper', 'digital clock', 'digital watch', 'dining table', 'dishcloth', 'dishwasher', 'disc brake', 'dock',
+ 'dog sled', 'dome', 'doormat', 'drilling rig', 'drum', 'drumstick', 'dumbbell', 'Dutch oven', 'electric fan',
+ 'electric guitar', 'electric locomotive', 'entertainment center', 'envelope', 'espresso machine', 'face powder',
+ 'feather boa', 'filing cabinet', 'fireboat', 'fire engine', 'fire screen sheet', 'flagpole', 'flute',
+ 'folding chair', 'football helmet', 'forklift', 'fountain', 'fountain pen', 'four-poster bed', 'freight car',
+ 'French horn', 'frying pan', 'fur coat', 'garbage truck', 'gas mask', 'gas pump', 'goblet', 'go-kart',
+ 'golf ball', 'golf cart', 'gondola', 'gong', 'gown', 'grand piano', 'greenhouse', 'grille', 'grocery store',
+ 'guillotine', 'barrette', 'hair spray', 'half-track', 'hammer', 'hamper', 'hair dryer', 'hand-held computer',
+ 'handkerchief', 'hard disk drive', 'harmonica', 'harp', 'harvester', 'hatchet', 'holster', 'home theater',
+ 'honeycomb', 'hook', 'hoop skirt', 'horizontal bar', 'horse-drawn vehicle', 'hourglass', 'iPod', 'clothes iron',
+ "jack-o'-lantern", 'jeans', 'jeep', 'T-shirt', 'jigsaw puzzle', 'pulled rickshaw', 'joystick', 'kimono',
+ 'knee pad', 'knot', 'lab coat', 'ladle', 'lampshade', 'laptop computer', 'lawn mower', 'lens cap',
+ 'paper knife', 'library', 'lifeboat', 'lighter', 'limousine', 'ocean liner', 'lipstick', 'slip-on shoe',
+ 'lotion', 'speaker', 'loupe', 'sawmill', 'magnetic compass', 'mail bag', 'mailbox', 'tights', 'tank suit',
+ 'manhole cover', 'maraca', 'marimba', 'mask', 'match', 'maypole', 'maze', 'measuring cup', 'medicine chest',
+ 'megalith', 'microphone', 'microwave oven', 'military uniform', 'milk can', 'minibus', 'miniskirt', 'minivan',
+ 'missile', 'mitten', 'mixing bowl', 'mobile home', 'Model T', 'modem', 'monastery', 'monitor', 'moped',
+ 'mortar', 'square academic cap', 'mosque', 'mosquito net', 'scooter', 'mountain bike', 'tent', 'computer mouse',
+ 'mousetrap', 'moving van', 'muzzle', 'nail', 'neck brace', 'necklace', 'nipple', 'notebook computer', 'obelisk',
+ 'oboe', 'ocarina', 'odometer', 'oil filter', 'organ', 'oscilloscope', 'overskirt', 'bullock cart',
+ 'oxygen mask', 'packet', 'paddle', 'paddle wheel', 'padlock', 'paintbrush', 'pajamas', 'palace', 'pan flute',
+ 'paper towel', 'parachute', 'parallel bars', 'park bench', 'parking meter', 'passenger car', 'patio',
+ 'payphone', 'pedestal', 'pencil case', 'pencil sharpener', 'perfume', 'Petri dish', 'photocopier', 'plectrum',
+ 'Pickelhaube', 'picket fence', 'pickup truck', 'pier', 'piggy bank', 'pill bottle', 'pillow', 'ping-pong ball',
+ 'pinwheel', 'pirate ship', 'pitcher', 'hand plane', 'planetarium', 'plastic bag', 'plate rack', 'plow',
+ 'plunger', 'Polaroid camera', 'pole', 'police van', 'poncho', 'billiard table', 'soda bottle', 'pot',
+ "potter's wheel", 'power drill', 'prayer rug', 'printer', 'prison', 'projectile', 'projector', 'hockey puck',
+ 'punching bag', 'purse', 'quill', 'quilt', 'race car', 'racket', 'radiator', 'radio', 'radio telescope',
+ 'rain barrel', 'recreational vehicle', 'reel', 'reflex camera', 'refrigerator', 'remote control', 'restaurant',
+ 'revolver', 'rifle', 'rocking chair', 'rotisserie', 'eraser', 'rugby ball', 'ruler', 'running shoe', 'safe',
+ 'safety pin', 'salt shaker', 'sandal', 'sarong', 'saxophone', 'scabbard', 'weighing scale', 'school bus',
+ 'schooner', 'scoreboard', 'CRT screen', 'screw', 'screwdriver', 'seat belt', 'sewing machine', 'shield',
+ 'shoe store', 'shoji', 'shopping basket', 'shopping cart', 'shovel', 'shower cap', 'shower curtain', 'ski',
+ 'ski mask', 'sleeping bag', 'slide rule', 'sliding door', 'slot machine', 'snorkel', 'snowmobile', 'snowplow',
+ 'soap dispenser', 'soccer ball', 'sock', 'solar thermal collector', 'sombrero', 'soup bowl', 'space bar',
+ 'space heater', 'space shuttle', 'spatula', 'motorboat', 'spider web', 'spindle', 'sports car', 'spotlight',
+ 'stage', 'steam locomotive', 'through arch bridge', 'steel drum', 'stethoscope', 'scarf', 'stone wall',
+ 'stopwatch', 'stove', 'strainer', 'tram', 'stretcher', 'couch', 'stupa', 'submarine', 'suit', 'sundial',
+ 'sunglass', 'sunglasses', 'sunscreen', 'suspension bridge', 'mop', 'sweatshirt', 'swimsuit', 'swing', 'switch',
+ 'syringe', 'table lamp', 'tank', 'tape player', 'teapot', 'teddy bear', 'television', 'tennis ball',
+ 'thatched roof', 'front curtain', 'thimble', 'threshing machine', 'throne', 'tile roof', 'toaster',
+ 'tobacco shop', 'toilet seat', 'torch', 'totem pole', 'tow truck', 'toy store', 'tractor', 'semi-trailer truck',
+ 'tray', 'trench coat', 'tricycle', 'trimaran', 'tripod', 'triumphal arch', 'trolleybus', 'trombone', 'tub',
+ 'turnstile', 'typewriter keyboard', 'umbrella', 'unicycle', 'upright piano', 'vacuum cleaner', 'vase', 'vault',
+ 'velvet', 'vending machine', 'vestment', 'viaduct', 'violin', 'volleyball', 'waffle iron', 'wall clock',
+ 'wallet', 'wardrobe', 'military aircraft', 'sink', 'washing machine', 'water bottle', 'water jug',
+ 'water tower', 'whiskey jug', 'whistle', 'wig', 'window screen', 'window shade', 'Windsor tie', 'wine bottle',
+ 'wing', 'wok', 'wooden spoon', 'wool', 'split-rail fence', 'shipwreck', 'yawl', 'yurt', 'website', 'comic book',
+ 'crossword', 'traffic sign', 'traffic light', 'dust jacket', 'menu', 'plate', 'guacamole', 'consomme',
+ 'hot pot', 'trifle', 'ice cream', 'ice pop', 'baguette', 'bagel', 'pretzel', 'cheeseburger', 'hot dog',
+ 'mashed potato', 'cabbage', 'broccoli', 'cauliflower', 'zucchini', 'spaghetti squash', 'acorn squash',
+ 'butternut squash', 'cucumber', 'artichoke', 'bell pepper', 'cardoon', 'mushroom', 'Granny Smith', 'strawberry',
+ 'orange', 'lemon', 'fig', 'pineapple', 'banana', 'jackfruit', 'custard apple', 'pomegranate', 'hay',
+ 'carbonara', 'chocolate syrup', 'dough', 'meatloaf', 'pizza', 'pot pie', 'burrito', 'red wine', 'espresso',
+ 'cup', 'eggnog', 'alp', 'bubble', 'cliff', 'coral reef', 'geyser', 'lakeshore', 'promontory', 'shoal',
+ 'seashore', 'valley', 'volcano', 'baseball player', 'bridegroom', 'scuba diver', 'rapeseed', 'daisy',
+ "yellow lady's slipper", 'corn', 'acorn', 'rose hip', 'horse chestnut seed', 'coral fungus', 'agaric',
+ 'gyromitra', 'stinkhorn mushroom', 'earth star', 'hen-of-the-woods', 'bolete', 'ear',
+ 'toilet paper'] # class names
+
+# Download script/URL (optional)
+download: data/scripts/get_imagenet.sh
diff --git a/yolov7_seg/det/data/coco.yaml b/yolov7_seg/det/data/coco.yaml
new file mode 100644
index 000000000..51a03fb41
--- /dev/null
+++ b/yolov7_seg/det/data/coco.yaml
@@ -0,0 +1,45 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# COCO 2017 dataset http://cocodataset.org by Microsoft
+# Example usage: python train.py --data coco.yaml
+# parent
+# ├── yolov5
+# └── datasets
+# └── coco ← downloads here (20.1 GB)
+
+
+# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
+path: ../datasets/coco # dataset root dir
+train: train2017.txt # train images (relative to 'path') 118287 images
+val: val2017.txt # val images (relative to 'path') 5000 images
+test: test-dev2017.txt # 20288 of 40670 images, submit to https://competitions.codalab.org/competitions/20794
+
+# Classes
+nc: 80 # number of classes
+names: ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
+ 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
+ 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
+ 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
+ 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
+ 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
+ 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
+ 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
+ 'hair drier', 'toothbrush'] # class names
+
+
+# Download script/URL (optional)
+download: |
+ from utils.general import download, Path
+
+
+ # Download labels
+ segments = False # segment or box labels
+ dir = Path(yaml['path']) # dataset root dir
+ url = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/'
+ urls = [url + ('coco2017labels-segments.zip' if segments else 'coco2017labels.zip')] # labels
+ download(urls, dir=dir.parent)
+
+ # Download data
+ urls = ['http://images.cocodataset.org/zips/train2017.zip', # 19G, 118k images
+ 'http://images.cocodataset.org/zips/val2017.zip', # 1G, 5k images
+ 'http://images.cocodataset.org/zips/test2017.zip'] # 7G, 41k images (optional)
+ download(urls, dir=dir / 'images', threads=3)
diff --git a/yolov7_seg/det/data/hyps/hyp.scratch-high.yaml b/yolov7_seg/det/data/hyps/hyp.scratch-high.yaml
new file mode 100644
index 000000000..9ba0d0826
--- /dev/null
+++ b/yolov7_seg/det/data/hyps/hyp.scratch-high.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for high-augmentation COCO training from scratch
+# python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.3 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 0.7 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.9 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.1 # image mixup (probability)
+copy_paste: 0.1 # segment copy-paste (probability)
diff --git a/yolov7_seg/det/data/hyps/hyp.scratch-low.yaml b/yolov7_seg/det/data/hyps/hyp.scratch-low.yaml
new file mode 100644
index 000000000..dcf0f6495
--- /dev/null
+++ b/yolov7_seg/det/data/hyps/hyp.scratch-low.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for low-augmentation COCO training from scratch
+# python train.py --batch 64 --cfg yolov5n6.yaml --weights '' --data coco.yaml --img 640 --epochs 300 --linear
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.01 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.5 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 1.0 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.5 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.0 # image mixup (probability)
+copy_paste: 0.0 # segment copy-paste (probability)
diff --git a/yolov7_seg/det/data/hyps/hyp.scratch-med.yaml b/yolov7_seg/det/data/hyps/hyp.scratch-med.yaml
new file mode 100644
index 000000000..6dcfc2dc1
--- /dev/null
+++ b/yolov7_seg/det/data/hyps/hyp.scratch-med.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for medium-augmentation COCO training from scratch
+# python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.3 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 0.7 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.9 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.1 # image mixup (probability)
+copy_paste: 0.0 # segment copy-paste (probability)
diff --git a/yolov7_seg/det/data/scripts/get_coco.sh b/yolov7_seg/det/data/scripts/get_coco.sh
new file mode 100644
index 000000000..eb77e81e9
--- /dev/null
+++ b/yolov7_seg/det/data/scripts/get_coco.sh
@@ -0,0 +1,56 @@
+#!/bin/bash
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Download COCO 2017 dataset http://cocodataset.org
+# Example usage: bash data/scripts/get_coco.sh
+# parent
+# ├── yolov5
+# └── datasets
+# └── coco ← downloads here
+
+# Arguments (optional) Usage: bash data/scripts/get_coco.sh --train --val --test --segments
+if [ "$#" -gt 0 ]; then
+ for opt in "$@"; do
+ case "${opt}" in
+ --train) train=true ;;
+ --val) val=true ;;
+ --test) test=true ;;
+ --segments) segments=true ;;
+ esac
+ done
+else
+ train=true
+ val=true
+ test=false
+ segments=false
+fi
+
+# Download/unzip labels
+d='../datasets' # unzip directory
+url=https://github.com/ultralytics/yolov5/releases/download/v1.0/
+if [ "$segments" == "true" ]; then
+ f='coco2017labels-segments.zip' # 168 MB
+else
+ f='coco2017labels.zip' # 168 MB
+fi
+echo 'Downloading' $url$f ' ...'
+curl -L $url$f -o $f -# && unzip -q $f -d $d && rm $f &
+
+# Download/unzip images
+d='../datasets/coco/images' # unzip directory
+url=http://images.cocodataset.org/zips/
+if [ "$train" == "true" ]; then
+ f='train2017.zip' # 19G, 118k images
+ echo 'Downloading' $url$f '...'
+ curl -L $url$f -o $f -# && unzip -q $f -d $d && rm $f &
+fi
+if [ "$val" == "true" ]; then
+ f='val2017.zip' # 1G, 5k images
+ echo 'Downloading' $url$f '...'
+ curl -L $url$f -o $f -# && unzip -q $f -d $d && rm $f &
+fi
+if [ "$test" == "true" ]; then
+ f='test2017.zip' # 7G, 41k images (optional)
+ echo 'Downloading' $url$f '...'
+ curl -L $url$f -o $f -# && unzip -q $f -d $d && rm $f &
+fi
+wait # finish background tasks
diff --git a/yolov7_seg/det/data/scripts/get_imagenet.sh b/yolov7_seg/det/data/scripts/get_imagenet.sh
new file mode 100644
index 000000000..0c287d52c
--- /dev/null
+++ b/yolov7_seg/det/data/scripts/get_imagenet.sh
@@ -0,0 +1,51 @@
+#!/bin/bash
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Download ILSVRC2012 ImageNet dataset https://image-net.org
+# Example usage: bash data/scripts/get_imagenet.sh
+# parent
+# ├── yolov5
+# └── datasets
+# └── imagenet ← downloads here
+
+# Arguments (optional) Usage: bash data/scripts/get_imagenet.sh --train --val
+if [ "$#" -gt 0 ]; then
+ for opt in "$@"; do
+ case "${opt}" in
+ --train) train=true ;;
+ --val) val=true ;;
+ esac
+ done
+else
+ train=true
+ val=true
+fi
+
+# Make dir
+d='../datasets/imagenet' # unzip directory
+mkdir -p $d && cd $d
+
+# Download/unzip train
+if [ "$train" == "true" ]; then
+ wget https://image-net.org/data/ILSVRC/2012/ILSVRC2012_img_train.tar # download 138G, 1281167 images
+ mkdir train && mv ILSVRC2012_img_train.tar train/ && cd train
+ tar -xf ILSVRC2012_img_train.tar && rm -f ILSVRC2012_img_train.tar
+ find . -name "*.tar" | while read NAME; do
+ mkdir -p "${NAME%.tar}"
+ tar -xf "${NAME}" -C "${NAME%.tar}"
+ rm -f "${NAME}"
+ done
+ cd ..
+fi
+
+# Download/unzip val
+if [ "$val" == "true" ]; then
+ wget https://image-net.org/data/ILSVRC/2012/ILSVRC2012_img_val.tar # download 6.3G, 50000 images
+ mkdir val && mv ILSVRC2012_img_val.tar val/ && cd val && tar -xf ILSVRC2012_img_val.tar
+ wget -qO- https://raw.githubusercontent.com/soumith/imagenetloader.torch/master/valprep.sh | bash # move into subdirs
+fi
+
+# Delete corrupted image (optional: PNG under JPEG name that may cause dataloaders to fail)
+# rm train/n04266014/n04266014_10835.JPEG
+
+# TFRecords (optional)
+# wget https://raw.githubusercontent.com/tensorflow/models/master/research/slim/datasets/imagenet_lsvrc_2015_synsets.txt
diff --git a/yolov7_seg/det/detect.py b/yolov7_seg/det/detect.py
new file mode 100644
index 000000000..df5024a4d
--- /dev/null
+++ b/yolov7_seg/det/detect.py
@@ -0,0 +1,257 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run inference on images, videos, directories, streams, etc.
+
+Usage - sources:
+ $ python path/to/detect.py --weights yolov5s.pt --source 0 # webcam
+ img.jpg # image
+ vid.mp4 # video
+ path/ # directory
+ path/*.jpg # glob
+ 'https://youtu.be/Zgi9g1ksQHc' # YouTube
+ 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
+
+Usage - formats:
+ $ python path/to/detect.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import os
+import platform
+import sys
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.dataloaders import IMG_FORMATS, VID_FORMATS, LoadImages, LoadStreams
+from utils.general import (LOGGER, check_file, check_img_size, check_imshow, check_requirements, colorstr, cv2,
+ increment_path, non_max_suppression, print_args, scale_coords, strip_optimizer, xyxy2xywh)
+from utils.plots import Annotator, colors, save_one_box
+from utils.torch_utils import select_device, smart_inference_mode, time_sync
+
+
+@smart_inference_mode()
+def run(
+ weights=ROOT / 'yolov5s.pt', # model.pt path(s)
+ source=ROOT / 'data/images', # file/dir/URL/glob, 0 for webcam
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ imgsz=(640, 640), # inference size (height, width)
+ conf_thres=0.25, # confidence threshold
+ iou_thres=0.45, # NMS IOU threshold
+ max_det=1000, # maximum detections per image
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ view_img=False, # show results
+ save_txt=False, # save results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_crop=False, # save cropped prediction boxes
+ nosave=False, # do not save images/videos
+ classes=None, # filter by class: --class 0, or --class 0 2 3
+ agnostic_nms=False, # class-agnostic NMS
+ augment=False, # augmented inference
+ visualize=False, # visualize features
+ update=False, # update all models
+ project=ROOT / 'runs/detect', # save results to project/name
+ name='exp', # save results to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ line_thickness=3, # bounding box thickness (pixels)
+ hide_labels=False, # hide labels
+ hide_conf=False, # hide confidences
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+):
+ source = str(source)
+ save_img = not nosave and not source.endswith('.txt') # save inference images
+ is_file = Path(source).suffix[1:] in (IMG_FORMATS + VID_FORMATS)
+ is_url = source.lower().startswith(('rtsp://', 'rtmp://', 'http://', 'https://'))
+ webcam = source.isnumeric() or source.endswith('.txt') or (is_url and not is_file)
+ if is_url and is_file:
+ source = check_file(source) # download
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ device = select_device(device)
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, names, pt = model.stride, model.names, model.pt
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+
+ # Dataloader
+ if webcam:
+ view_img = check_imshow()
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride, auto=pt)
+ bs = len(dataset) # batch_size
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt)
+ bs = 1 # batch_size
+ vid_path, vid_writer = [None] * bs, [None] * bs
+
+ # Run inference
+ model.warmup(imgsz=(1 if pt else bs, 3, *imgsz)) # warmup
+ seen, windows, dt = 0, [], [0.0, 0.0, 0.0]
+ for path, im, im0s, vid_cap, s in dataset:
+ t1 = time_sync()
+ im = torch.from_numpy(im).to(device)
+ im = im.half() if model.fp16 else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ if len(im.shape) == 3:
+ im = im[None] # expand for batch dim
+ t2 = time_sync()
+ dt[0] += t2 - t1
+
+ # Inference
+ visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False
+ pred = model(im, augment=augment, visualize=visualize)
+ t3 = time_sync()
+ dt[1] += t3 - t2
+
+ # NMS
+ pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det)
+ dt[2] += time_sync() - t3
+
+ # Second-stage classifier (optional)
+ # pred = utils.general.apply_classifier(pred, classifier_model, im, im0s)
+
+ # Process predictions
+ for i, det in enumerate(pred): # per image
+ seen += 1
+ if webcam: # batch_size >= 1
+ p, im0, frame = path[i], im0s[i].copy(), dataset.count
+ s += f'{i}: '
+ else:
+ p, im0, frame = path, im0s.copy(), getattr(dataset, 'frame', 0)
+
+ p = Path(p) # to Path
+ save_path = str(save_dir / p.name) # im.jpg
+ txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # im.txt
+ s += '%gx%g ' % im.shape[2:] # print string
+ gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
+ imc = im0.copy() if save_crop else im0 # for save_crop
+ annotator = Annotator(im0, line_width=line_thickness, example=str(names))
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(im.shape[2:], det[:, :4], im0.shape).round()
+
+ # Print results
+ for c in det[:, -1].unique():
+ n = (det[:, -1] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ if save_txt: # Write to file
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(f'{txt_path}.txt', 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+ if save_img or save_crop or view_img: # Add bbox to image
+ c = int(cls) # integer class
+ label = None if hide_labels else (names[c] if hide_conf else f'{names[c]} {conf:.2f}')
+ annotator.box_label(xyxy, label, color=colors(c, True))
+ if save_crop:
+ save_one_box(xyxy, imc, file=save_dir / 'crops' / names[c] / f'{p.stem}.jpg', BGR=True)
+
+ # Stream results
+ im0 = annotator.result()
+ if view_img:
+ if platform.system() == 'Linux' and p not in windows:
+ windows.append(p)
+ cv2.namedWindow(str(p), cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO) # allow window resize (Linux)
+ cv2.resizeWindow(str(p), im0.shape[1], im0.shape[0])
+ cv2.imshow(str(p), im0)
+ cv2.waitKey(1) # 1 millisecond
+
+ # Save results (image with detections)
+ if save_img:
+ if dataset.mode == 'image':
+ cv2.imwrite(save_path, im0)
+ else: # 'video' or 'stream'
+ if vid_path[i] != save_path: # new video
+ vid_path[i] = save_path
+ if isinstance(vid_writer[i], cv2.VideoWriter):
+ vid_writer[i].release() # release previous video writer
+ if vid_cap: # video
+ fps = vid_cap.get(cv2.CAP_PROP_FPS)
+ w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ else: # stream
+ fps, w, h = 30, im0.shape[1], im0.shape[0]
+ save_path = str(Path(save_path).with_suffix('.mp4')) # force *.mp4 suffix on results videos
+ vid_writer[i] = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
+ vid_writer[i].write(im0)
+
+ # Print time (inference-only)
+ LOGGER.info(f'{s}Done. ({t3 - t2:.3f}s)')
+
+ # Print results
+ t = tuple(x / seen * 1E3 for x in dt) # speeds per image
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {(1, 3, *imgsz)}' % t)
+ if save_txt or save_img:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ if update:
+ strip_optimizer(weights[0]) # update model (to fix SourceChangeWarning)
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)')
+ parser.add_argument('--source', type=str, default=ROOT / 'data/images', help='file/dir/URL/glob, 0 for webcam')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='(optional) dataset.yaml path')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=1000, help='maximum detections per image')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--view-img', action='store_true', help='show results')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-crop', action='store_true', help='save cropped prediction boxes')
+ parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
+ parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --classes 0, or --classes 0 2 3')
+ parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--visualize', action='store_true', help='visualize features')
+ parser.add_argument('--update', action='store_true', help='update all models')
+ parser.add_argument('--project', default=ROOT / 'runs/detect', help='save results to project/name')
+ parser.add_argument('--name', default='exp', help='save results to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--line-thickness', default=3, type=int, help='bounding box thickness (pixels)')
+ parser.add_argument('--hide-labels', default=False, action='store_true', help='hide labels')
+ parser.add_argument('--hide-conf', default=False, action='store_true', help='hide confidences')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ #check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/det/export.py b/yolov7_seg/det/export.py
new file mode 100644
index 000000000..5f08a87a9
--- /dev/null
+++ b/yolov7_seg/det/export.py
@@ -0,0 +1,616 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Export a YOLOv5 PyTorch model to other formats. TensorFlow exports authored by https://github.com/zldrobit
+
+Format | `export.py --include` | Model
+--- | --- | ---
+PyTorch | - | yolov5s.pt
+TorchScript | `torchscript` | yolov5s.torchscript
+ONNX | `onnx` | yolov5s.onnx
+OpenVINO | `openvino` | yolov5s_openvino_model/
+TensorRT | `engine` | yolov5s.engine
+CoreML | `coreml` | yolov5s.mlmodel
+TensorFlow SavedModel | `saved_model` | yolov5s_saved_model/
+TensorFlow GraphDef | `pb` | yolov5s.pb
+TensorFlow Lite | `tflite` | yolov5s.tflite
+TensorFlow Edge TPU | `edgetpu` | yolov5s_edgetpu.tflite
+TensorFlow.js | `tfjs` | yolov5s_web_model/
+
+Requirements:
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu # CPU
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime-gpu openvino-dev tensorflow # GPU
+
+Usage:
+ $ python path/to/export.py --weights yolov5s.pt --include torchscript onnx openvino engine coreml tflite ...
+
+Inference:
+ $ python path/to/detect.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+
+TensorFlow.js:
+ $ cd .. && git clone https://github.com/zldrobit/tfjs-yolov5-example.git && cd tfjs-yolov5-example
+ $ npm install
+ $ ln -s ../../yolov5/yolov5s_web_model public/yolov5s_web_model
+ $ npm start
+"""
+
+import argparse
+import json
+import os
+import platform
+import subprocess
+import sys
+import time
+import warnings
+from pathlib import Path
+
+import pandas as pd
+import torch
+import yaml
+from torch.utils.mobile_optimizer import optimize_for_mobile
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+if platform.system() != 'Windows':
+ ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.experimental import attempt_load
+from models.yolo import Detect
+from utils.dataloaders import LoadImages
+from utils.general import (LOGGER, check_dataset, check_img_size, check_requirements, check_version, check_yaml,
+ colorstr, file_size, print_args, url2file)
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+def export_formats():
+ # YOLOv5 export formats
+ x = [
+ ['PyTorch', '-', '.pt', True, True],
+ ['TorchScript', 'torchscript', '.torchscript', True, True],
+ ['ONNX', 'onnx', '.onnx', True, True],
+ ['OpenVINO', 'openvino', '_openvino_model', True, False],
+ ['TensorRT', 'engine', '.engine', False, True],
+ ['CoreML', 'coreml', '.mlmodel', True, False],
+ ['TensorFlow SavedModel', 'saved_model', '_saved_model', True, True],
+ ['TensorFlow GraphDef', 'pb', '.pb', True, True],
+ ['TensorFlow Lite', 'tflite', '.tflite', True, False],
+ ['TensorFlow Edge TPU', 'edgetpu', '_edgetpu.tflite', False, False],
+ ['TensorFlow.js', 'tfjs', '_web_model', False, False],]
+ return pd.DataFrame(x, columns=['Format', 'Argument', 'Suffix', 'CPU', 'GPU'])
+
+
+def export_torchscript(model, im, file, optimize, prefix=colorstr('TorchScript:')):
+ # YOLOv5 TorchScript model export
+ try:
+ LOGGER.info(f'\n{prefix} starting export with torch {torch.__version__}...')
+ f = file.with_suffix('.torchscript')
+
+ ts = torch.jit.trace(model, im, strict=False)
+ d = {"shape": im.shape, "stride": int(max(model.stride)), "names": model.names}
+ extra_files = {'config.txt': json.dumps(d)} # torch._C.ExtraFilesMap()
+ if optimize: # https://pytorch.org/tutorials/recipes/mobile_interpreter.html
+ optimize_for_mobile(ts)._save_for_lite_interpreter(str(f), _extra_files=extra_files)
+ else:
+ ts.save(str(f), _extra_files=extra_files)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'{prefix} export failure: {e}')
+
+
+def export_onnx(model, im, file, opset, train, dynamic, simplify, prefix=colorstr('ONNX:')):
+ # YOLOv5 ONNX export
+ try:
+ check_requirements(('onnx',))
+ import onnx
+
+ LOGGER.info(f'\n{prefix} starting export with onnx {onnx.__version__}...')
+ f = file.with_suffix('.onnx')
+
+ torch.onnx.export(
+ model.cpu() if dynamic else model, # --dynamic only compatible with cpu
+ im.cpu() if dynamic else im,
+ f,
+ verbose=False,
+ opset_version=opset,
+ training=torch.onnx.TrainingMode.TRAINING if train else torch.onnx.TrainingMode.EVAL,
+ do_constant_folding=not train,
+ input_names=['images'],
+ output_names=['output'],
+ dynamic_axes={
+ 'images': {
+ 0: 'batch',
+ 2: 'height',
+ 3: 'width'}, # shape(1,3,640,640)
+ 'output': {
+ 0: 'batch',
+ 1: 'anchors'} # shape(1,25200,85)
+ } if dynamic else None)
+
+ # Checks
+ model_onnx = onnx.load(f) # load onnx model
+ onnx.checker.check_model(model_onnx) # check onnx model
+
+ # Metadata
+ d = {'stride': int(max(model.stride)), 'names': model.names}
+ for k, v in d.items():
+ meta = model_onnx.metadata_props.add()
+ meta.key, meta.value = k, str(v)
+ onnx.save(model_onnx, f)
+
+ # Simplify
+ if simplify:
+ try:
+ cuda = torch.cuda.is_available()
+ check_requirements(('onnxruntime-gpu' if cuda else 'onnxruntime', 'onnx-simplifier>=0.4.1'))
+ import onnxsim
+
+ LOGGER.info(f'{prefix} simplifying with onnx-simplifier {onnxsim.__version__}...')
+ model_onnx, check = onnxsim.simplify(model_onnx)
+ assert check, 'assert check failed'
+ onnx.save(model_onnx, f)
+ except Exception as e:
+ LOGGER.info(f'{prefix} simplifier failure: {e}')
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'{prefix} export failure: {e}')
+
+
+def export_openvino(model, file, half, prefix=colorstr('OpenVINO:')):
+ # YOLOv5 OpenVINO export
+ try:
+ check_requirements(('openvino-dev',)) # requires openvino-dev: https://pypi.org/project/openvino-dev/
+ import openvino.inference_engine as ie
+
+ LOGGER.info(f'\n{prefix} starting export with openvino {ie.__version__}...')
+ f = str(file).replace('.pt', f'_openvino_model{os.sep}')
+
+ cmd = f"mo --input_model {file.with_suffix('.onnx')} --output_dir {f} --data_type {'FP16' if half else 'FP32'}"
+ subprocess.check_output(cmd.split()) # export
+ with open(Path(f) / file.with_suffix('.yaml').name, 'w') as g:
+ yaml.dump({'stride': int(max(model.stride)), 'names': model.names}, g) # add metadata.yaml
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_coreml(model, im, file, int8, half, prefix=colorstr('CoreML:')):
+ # YOLOv5 CoreML export
+ try:
+ check_requirements(('coremltools',))
+ import coremltools as ct
+
+ LOGGER.info(f'\n{prefix} starting export with coremltools {ct.__version__}...')
+ f = file.with_suffix('.mlmodel')
+
+ ts = torch.jit.trace(model, im, strict=False) # TorchScript model
+ ct_model = ct.convert(ts, inputs=[ct.ImageType('image', shape=im.shape, scale=1 / 255, bias=[0, 0, 0])])
+ bits, mode = (8, 'kmeans_lut') if int8 else (16, 'linear') if half else (32, None)
+ if bits < 32:
+ if platform.system() == 'Darwin': # quantization only supported on macOS
+ with warnings.catch_warnings():
+ warnings.filterwarnings("ignore", category=DeprecationWarning) # suppress numpy==1.20 float warning
+ ct_model = ct.models.neural_network.quantization_utils.quantize_weights(ct_model, bits, mode)
+ else:
+ print(f'{prefix} quantization only supported on macOS, skipping...')
+ ct_model.save(f)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return ct_model, f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+ return None, None
+
+
+def export_engine(model, im, file, train, half, dynamic, simplify, workspace=4, verbose=False):
+ # YOLOv5 TensorRT export https://developer.nvidia.com/tensorrt
+ prefix = colorstr('TensorRT:')
+ try:
+ assert im.device.type != 'cpu', 'export running on CPU but must be on GPU, i.e. `python export.py --device 0`'
+ try:
+ import tensorrt as trt
+ except Exception:
+ if platform.system() == 'Linux':
+ check_requirements(('nvidia-tensorrt',), cmds=('-U --index-url https://pypi.ngc.nvidia.com',))
+ import tensorrt as trt
+
+ if trt.__version__[0] == '7': # TensorRT 7 handling https://github.com/ultralytics/yolov5/issues/6012
+ grid = model.model[-1].anchor_grid
+ model.model[-1].anchor_grid = [a[..., :1, :1, :] for a in grid]
+ export_onnx(model, im, file, 12, train, dynamic, simplify) # opset 12
+ model.model[-1].anchor_grid = grid
+ else: # TensorRT >= 8
+ check_version(trt.__version__, '8.0.0', hard=True) # require tensorrt>=8.0.0
+ export_onnx(model, im, file, 13, train, dynamic, simplify) # opset 13
+ onnx = file.with_suffix('.onnx')
+
+ LOGGER.info(f'\n{prefix} starting export with TensorRT {trt.__version__}...')
+ assert onnx.exists(), f'failed to export ONNX file: {onnx}'
+ f = file.with_suffix('.engine') # TensorRT engine file
+ logger = trt.Logger(trt.Logger.INFO)
+ if verbose:
+ logger.min_severity = trt.Logger.Severity.VERBOSE
+
+ builder = trt.Builder(logger)
+ config = builder.create_builder_config()
+ config.max_workspace_size = workspace * 1 << 30
+ # config.set_memory_pool_limit(trt.MemoryPoolType.WORKSPACE, workspace << 30) # fix TRT 8.4 deprecation notice
+
+ flag = (1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH))
+ network = builder.create_network(flag)
+ parser = trt.OnnxParser(network, logger)
+ if not parser.parse_from_file(str(onnx)):
+ raise RuntimeError(f'failed to load ONNX file: {onnx}')
+
+ inputs = [network.get_input(i) for i in range(network.num_inputs)]
+ outputs = [network.get_output(i) for i in range(network.num_outputs)]
+ LOGGER.info(f'{prefix} Network Description:')
+ for inp in inputs:
+ LOGGER.info(f'{prefix}\tinput "{inp.name}" with shape {inp.shape} and dtype {inp.dtype}')
+ for out in outputs:
+ LOGGER.info(f'{prefix}\toutput "{out.name}" with shape {out.shape} and dtype {out.dtype}')
+
+ if dynamic:
+ if im.shape[0] <= 1:
+ LOGGER.warning(f"{prefix}WARNING: --dynamic model requires maximum --batch-size argument")
+ profile = builder.create_optimization_profile()
+ for inp in inputs:
+ profile.set_shape(inp.name, (1, *im.shape[1:]), (max(1, im.shape[0] // 2), *im.shape[1:]), im.shape)
+ config.add_optimization_profile(profile)
+
+ LOGGER.info(f'{prefix} building FP{16 if builder.platform_has_fast_fp16 and half else 32} engine in {f}')
+ if builder.platform_has_fast_fp16 and half:
+ config.set_flag(trt.BuilderFlag.FP16)
+ with builder.build_engine(network, config) as engine, open(f, 'wb') as t:
+ t.write(engine.serialize())
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_saved_model(model,
+ im,
+ file,
+ dynamic,
+ tf_nms=False,
+ agnostic_nms=False,
+ topk_per_class=100,
+ topk_all=100,
+ iou_thres=0.45,
+ conf_thres=0.25,
+ keras=False,
+ prefix=colorstr('TensorFlow SavedModel:')):
+ # YOLOv5 TensorFlow SavedModel export
+ try:
+ import tensorflow as tf
+ from tensorflow.python.framework.convert_to_constants import convert_variables_to_constants_v2
+
+ from models.tf import TFDetect, TFModel
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ f = str(file).replace('.pt', '_saved_model')
+ batch_size, ch, *imgsz = list(im.shape) # BCHW
+
+ tf_model = TFModel(cfg=model.yaml, model=model, nc=model.nc, imgsz=imgsz)
+ im = tf.zeros((batch_size, *imgsz, ch)) # BHWC order for TensorFlow
+ _ = tf_model.predict(im, tf_nms, agnostic_nms, topk_per_class, topk_all, iou_thres, conf_thres)
+ inputs = tf.keras.Input(shape=(*imgsz, ch), batch_size=None if dynamic else batch_size)
+ outputs = tf_model.predict(inputs, tf_nms, agnostic_nms, topk_per_class, topk_all, iou_thres, conf_thres)
+ keras_model = tf.keras.Model(inputs=inputs, outputs=outputs)
+ keras_model.trainable = False
+ keras_model.summary()
+ if keras:
+ keras_model.save(f, save_format='tf')
+ else:
+ spec = tf.TensorSpec(keras_model.inputs[0].shape, keras_model.inputs[0].dtype)
+ m = tf.function(lambda x: keras_model(x)) # full model
+ m = m.get_concrete_function(spec)
+ frozen_func = convert_variables_to_constants_v2(m)
+ tfm = tf.Module()
+ tfm.__call__ = tf.function(lambda x: frozen_func(x)[:4] if tf_nms else frozen_func(x)[0], [spec])
+ tfm.__call__(im)
+ tf.saved_model.save(tfm,
+ f,
+ options=tf.saved_model.SaveOptions(experimental_custom_gradients=False)
+ if check_version(tf.__version__, '2.6') else tf.saved_model.SaveOptions())
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return keras_model, f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+ return None, None
+
+
+def export_pb(keras_model, file, prefix=colorstr('TensorFlow GraphDef:')):
+ # YOLOv5 TensorFlow GraphDef *.pb export https://github.com/leimao/Frozen_Graph_TensorFlow
+ try:
+ import tensorflow as tf
+ from tensorflow.python.framework.convert_to_constants import convert_variables_to_constants_v2
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ f = file.with_suffix('.pb')
+
+ m = tf.function(lambda x: keras_model(x)) # full model
+ m = m.get_concrete_function(tf.TensorSpec(keras_model.inputs[0].shape, keras_model.inputs[0].dtype))
+ frozen_func = convert_variables_to_constants_v2(m)
+ frozen_func.graph.as_graph_def()
+ tf.io.write_graph(graph_or_graph_def=frozen_func.graph, logdir=str(f.parent), name=f.name, as_text=False)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_tflite(keras_model, im, file, int8, data, nms, agnostic_nms, prefix=colorstr('TensorFlow Lite:')):
+ # YOLOv5 TensorFlow Lite export
+ try:
+ import tensorflow as tf
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ batch_size, ch, *imgsz = list(im.shape) # BCHW
+ f = str(file).replace('.pt', '-fp16.tflite')
+
+ converter = tf.lite.TFLiteConverter.from_keras_model(keras_model)
+ converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS]
+ converter.target_spec.supported_types = [tf.float16]
+ converter.optimizations = [tf.lite.Optimize.DEFAULT]
+ if int8:
+ from models.tf import representative_dataset_gen
+ dataset = LoadImages(check_dataset(check_yaml(data))['train'], img_size=imgsz, auto=False)
+ converter.representative_dataset = lambda: representative_dataset_gen(dataset, ncalib=100)
+ converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS_INT8]
+ converter.target_spec.supported_types = []
+ converter.inference_input_type = tf.uint8 # or tf.int8
+ converter.inference_output_type = tf.uint8 # or tf.int8
+ converter.experimental_new_quantizer = True
+ f = str(file).replace('.pt', '-int8.tflite')
+ if nms or agnostic_nms:
+ converter.target_spec.supported_ops.append(tf.lite.OpsSet.SELECT_TF_OPS)
+
+ tflite_model = converter.convert()
+ open(f, "wb").write(tflite_model)
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_edgetpu(file, prefix=colorstr('Edge TPU:')):
+ # YOLOv5 Edge TPU export https://coral.ai/docs/edgetpu/models-intro/
+ try:
+ cmd = 'edgetpu_compiler --version'
+ help_url = 'https://coral.ai/docs/edgetpu/compiler/'
+ assert platform.system() == 'Linux', f'export only supported on Linux. See {help_url}'
+ if subprocess.run(f'{cmd} >/dev/null', shell=True).returncode != 0:
+ LOGGER.info(f'\n{prefix} export requires Edge TPU compiler. Attempting install from {help_url}')
+ sudo = subprocess.run('sudo --version >/dev/null', shell=True).returncode == 0 # sudo installed on system
+ for c in (
+ 'curl https://packages.cloud.google.com/apt/doc/apt-key.gpg | sudo apt-key add -',
+ 'echo "deb https://packages.cloud.google.com/apt coral-edgetpu-stable main" | sudo tee /etc/apt/sources.list.d/coral-edgetpu.list',
+ 'sudo apt-get update', 'sudo apt-get install edgetpu-compiler'):
+ subprocess.run(c if sudo else c.replace('sudo ', ''), shell=True, check=True)
+ ver = subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1]
+
+ LOGGER.info(f'\n{prefix} starting export with Edge TPU compiler {ver}...')
+ f = str(file).replace('.pt', '-int8_edgetpu.tflite') # Edge TPU model
+ f_tfl = str(file).replace('.pt', '-int8.tflite') # TFLite model
+
+ cmd = f"edgetpu_compiler -s -d -k 10 --out_dir {file.parent} {f_tfl}"
+ subprocess.run(cmd.split(), check=True)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+def export_tfjs(file, prefix=colorstr('TensorFlow.js:')):
+ # YOLOv5 TensorFlow.js export
+ try:
+ check_requirements(('tensorflowjs',))
+ import re
+
+ import tensorflowjs as tfjs
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflowjs {tfjs.__version__}...')
+ f = str(file).replace('.pt', '_web_model') # js dir
+ f_pb = file.with_suffix('.pb') # *.pb path
+ f_json = f'{f}/model.json' # *.json path
+
+ cmd = f'tensorflowjs_converter --input_format=tf_frozen_model ' \
+ f'--output_node_names=Identity,Identity_1,Identity_2,Identity_3 {f_pb} {f}'
+ subprocess.run(cmd.split())
+
+ with open(f_json) as j:
+ json = j.read()
+ with open(f_json, 'w') as j: # sort JSON Identity_* in ascending order
+ subst = re.sub(
+ r'{"outputs": {"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}}}', r'{"outputs": {"Identity": {"name": "Identity"}, '
+ r'"Identity_1": {"name": "Identity_1"}, '
+ r'"Identity_2": {"name": "Identity_2"}, '
+ r'"Identity_3": {"name": "Identity_3"}}}', json)
+ j.write(subst)
+
+ LOGGER.info(f'{prefix} export success, saved as {f} ({file_size(f):.1f} MB)')
+ return f
+ except Exception as e:
+ LOGGER.info(f'\n{prefix} export failure: {e}')
+
+
+@smart_inference_mode()
+def run(
+ data=ROOT / 'data/coco128.yaml', # 'dataset.yaml path'
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=(640, 640), # image (height, width)
+ batch_size=1, # batch size
+ device='cpu', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ include=('torchscript', 'onnx'), # include formats
+ half=False, # FP16 half-precision export
+ inplace=False, # set YOLOv5 Detect() inplace=True
+ train=False, # model.train() mode
+ keras=False, # use Keras
+ optimize=False, # TorchScript: optimize for mobile
+ int8=False, # CoreML/TF INT8 quantization
+ dynamic=False, # ONNX/TF/TensorRT: dynamic axes
+ simplify=False, # ONNX: simplify model
+ opset=12, # ONNX: opset version
+ verbose=False, # TensorRT: verbose log
+ workspace=4, # TensorRT: workspace size (GB)
+ nms=False, # TF: add NMS to model
+ agnostic_nms=False, # TF: add agnostic NMS to model
+ topk_per_class=100, # TF.js NMS: topk per class to keep
+ topk_all=100, # TF.js NMS: topk for all classes to keep
+ iou_thres=0.45, # TF.js NMS: IoU threshold
+ conf_thres=0.25, # TF.js NMS: confidence threshold
+):
+ t = time.time()
+ include = [x.lower() for x in include] # to lowercase
+ fmts = tuple(export_formats()['Argument'][1:]) # --include arguments
+ flags = [x in include for x in fmts]
+ assert sum(flags) == len(include), f'ERROR: Invalid --include {include}, valid --include arguments are {fmts}'
+ jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs = flags # export booleans
+ file = Path(url2file(weights) if str(weights).startswith(('http:/', 'https:/')) else weights) # PyTorch weights
+
+ # Load PyTorch model
+ device = select_device(device)
+ if half:
+ assert device.type != 'cpu' or coreml, '--half only compatible with GPU export, i.e. use --device 0'
+ assert not dynamic, '--half not compatible with --dynamic, i.e. use either --half or --dynamic but not both'
+ model = attempt_load(weights, device=device, inplace=True, fuse=True) # load FP32 model
+
+ # Checks
+ imgsz *= 2 if len(imgsz) == 1 else 1 # expand
+ if optimize:
+ assert device.type == 'cpu', '--optimize not compatible with cuda devices, i.e. use --device cpu'
+
+ # Input
+ gs = int(max(model.stride)) # grid size (max stride)
+ imgsz = [check_img_size(x, gs) for x in imgsz] # verify img_size are gs-multiples
+ im = torch.zeros(batch_size, 3, *imgsz).to(device) # image size(1,3,320,192) BCHW iDetection
+
+ # Update model
+ model.train() if train else model.eval() # training mode = no Detect() layer grid construction
+ for k, m in model.named_modules():
+ if isinstance(m, Detect):
+ m.inplace = inplace
+ m.onnx_dynamic = dynamic
+ m.export = True
+
+ for _ in range(2):
+ y = model(im) # dry runs
+ if half and not coreml:
+ im, model = im.half(), model.half() # to FP16
+ shape = tuple((y[0] if isinstance(y, tuple) else y).shape) # model output shape
+ LOGGER.info(f"\n{colorstr('PyTorch:')} starting from {file} with output shape {shape} ({file_size(file):.1f} MB)")
+
+ # Exports
+ f = [''] * 10 # exported filenames
+ warnings.filterwarnings(action='ignore', category=torch.jit.TracerWarning) # suppress TracerWarning
+ if jit:
+ f[0] = export_torchscript(model, im, file, optimize)
+ if engine: # TensorRT required before ONNX
+ f[1] = export_engine(model, im, file, train, half, dynamic, simplify, workspace, verbose)
+ if onnx or xml: # OpenVINO requires ONNX
+ f[2] = export_onnx(model, im, file, opset, train, dynamic, simplify)
+ if xml: # OpenVINO
+ f[3] = export_openvino(model, file, half)
+ if coreml:
+ _, f[4] = export_coreml(model, im, file, int8, half)
+
+ # TensorFlow Exports
+ if any((saved_model, pb, tflite, edgetpu, tfjs)):
+ if int8 or edgetpu: # TFLite --int8 bug https://github.com/ultralytics/yolov5/issues/5707
+ check_requirements(('flatbuffers==1.12',)) # required before `import tensorflow`
+ assert not tflite or not tfjs, 'TFLite and TF.js models must be exported separately, please pass only one type.'
+ model, f[5] = export_saved_model(model.cpu(),
+ im,
+ file,
+ dynamic,
+ tf_nms=nms or agnostic_nms or tfjs,
+ agnostic_nms=agnostic_nms or tfjs,
+ topk_per_class=topk_per_class,
+ topk_all=topk_all,
+ iou_thres=iou_thres,
+ conf_thres=conf_thres,
+ keras=keras)
+ if pb or tfjs: # pb prerequisite to tfjs
+ f[6] = export_pb(model, file)
+ if tflite or edgetpu:
+ f[7] = export_tflite(model, im, file, int8=int8 or edgetpu, data=data, nms=nms, agnostic_nms=agnostic_nms)
+ if edgetpu:
+ f[8] = export_edgetpu(file)
+ if tfjs:
+ f[9] = export_tfjs(file)
+
+ # Finish
+ f = [str(x) for x in f if x] # filter out '' and None
+ if any(f):
+ h = '--half' if half else '' # --half FP16 inference arg
+ LOGGER.info(f'\nExport complete ({time.time() - t:.2f}s)'
+ f"\nResults saved to {colorstr('bold', file.parent.resolve())}"
+ f"\nDetect: python detect.py --weights {f[-1]} {h}"
+ f"\nValidate: python val.py --weights {f[-1]} {h}"
+ f"\nPyTorch Hub: model = torch.hub.load('ultralytics/yolov5', 'custom', '{f[-1]}')"
+ f"\nVisualize: https://netron.app")
+ return f # return list of exported files/dirs
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model.pt path(s)')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640, 640], help='image (h, w)')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--device', default='cpu', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--half', action='store_true', help='FP16 half-precision export')
+ parser.add_argument('--inplace', action='store_true', help='set YOLOv5 Detect() inplace=True')
+ parser.add_argument('--train', action='store_true', help='model.train() mode')
+ parser.add_argument('--keras', action='store_true', help='TF: use Keras')
+ parser.add_argument('--optimize', action='store_true', help='TorchScript: optimize for mobile')
+ parser.add_argument('--int8', action='store_true', help='CoreML/TF INT8 quantization')
+ parser.add_argument('--dynamic', action='store_true', help='ONNX/TF/TensorRT: dynamic axes')
+ parser.add_argument('--simplify', action='store_true', help='ONNX: simplify model')
+ parser.add_argument('--opset', type=int, default=12, help='ONNX: opset version')
+ parser.add_argument('--verbose', action='store_true', help='TensorRT: verbose log')
+ parser.add_argument('--workspace', type=int, default=4, help='TensorRT: workspace size (GB)')
+ parser.add_argument('--nms', action='store_true', help='TF: add NMS to model')
+ parser.add_argument('--agnostic-nms', action='store_true', help='TF: add agnostic NMS to model')
+ parser.add_argument('--topk-per-class', type=int, default=100, help='TF.js NMS: topk per class to keep')
+ parser.add_argument('--topk-all', type=int, default=100, help='TF.js NMS: topk for all classes to keep')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='TF.js NMS: IoU threshold')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='TF.js NMS: confidence threshold')
+ parser.add_argument('--include',
+ nargs='+',
+ default=['torchscript', 'onnx'],
+ help='torchscript, onnx, openvino, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ for opt.weights in (opt.weights if isinstance(opt.weights, list) else [opt.weights]):
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/det/hubconf.py b/yolov7_seg/det/hubconf.py
new file mode 100644
index 000000000..37beeacd2
--- /dev/null
+++ b/yolov7_seg/det/hubconf.py
@@ -0,0 +1,160 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+PyTorch Hub models https://pytorch.org/hub/ultralytics_yolov5/
+
+Usage:
+ import torch
+ model = torch.hub.load('ultralytics/yolov5', 'yolov5s')
+ model = torch.hub.load('ultralytics/yolov5:master', 'custom', 'path/to/yolov5s.onnx') # file from branch
+"""
+
+import torch
+
+
+def _create(name, pretrained=True, channels=3, classes=80, autoshape=True, verbose=True, device=None):
+ """Creates or loads a YOLOv5 model
+
+ Arguments:
+ name (str): model name 'yolov5s' or path 'path/to/best.pt'
+ pretrained (bool): load pretrained weights into the model
+ channels (int): number of input channels
+ classes (int): number of model classes
+ autoshape (bool): apply YOLOv5 .autoshape() wrapper to model
+ verbose (bool): print all information to screen
+ device (str, torch.device, None): device to use for model parameters
+
+ Returns:
+ YOLOv5 model
+ """
+ from pathlib import Path
+
+ from models.common import AutoShape, DetectMultiBackend
+ from models.experimental import attempt_load
+ from models.yolo import Model
+ from utils.downloads import attempt_download
+ from utils.general import LOGGER, check_requirements, intersect_dicts, logging
+ from utils.torch_utils import select_device
+
+ if not verbose:
+ LOGGER.setLevel(logging.WARNING)
+ check_requirements(exclude=('tensorboard', 'thop', 'opencv-python'))
+ name = Path(name)
+ path = name.with_suffix('.pt') if name.suffix == '' and not name.is_dir() else name # checkpoint path
+ try:
+ device = select_device(device)
+ if pretrained and channels == 3 and classes == 80:
+ try:
+ model = DetectMultiBackend(path, device=device, fuse=autoshape) # detection model
+ if autoshape:
+ model = AutoShape(model) # for file/URI/PIL/cv2/np inputs and NMS
+ except Exception:
+ model = attempt_load(path, device=device, fuse=False) # arbitrary model
+ else:
+ cfg = list((Path(__file__).parent / 'models').rglob(f'{path.stem}.yaml'))[0] # model.yaml path
+ model = Model(cfg, channels, classes) # create model
+ if pretrained:
+ ckpt = torch.load(attempt_download(path), map_location=device) # load
+ csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
+ csd = intersect_dicts(csd, model.state_dict(), exclude=['anchors']) # intersect
+ model.load_state_dict(csd, strict=False) # load
+ if len(ckpt['model'].names) == classes:
+ model.names = ckpt['model'].names # set class names attribute
+ if not verbose:
+ LOGGER.setLevel(logging.INFO) # reset to default
+ return model.to(device)
+
+ except Exception as e:
+ help_url = 'https://github.com/ultralytics/yolov5/issues/36'
+ s = f'{e}. Cache may be out of date, try `force_reload=True` or see {help_url} for help.'
+ raise Exception(s) from e
+
+
+def custom(path='path/to/model.pt', autoshape=True, _verbose=True, device=None):
+ # YOLOv5 custom or local model
+ return _create(path, autoshape=autoshape, verbose=_verbose, device=device)
+
+
+def yolov5n(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-nano model https://github.com/ultralytics/yolov5
+ return _create('yolov5n', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5s(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-small model https://github.com/ultralytics/yolov5
+ return _create('yolov5s', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5m(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-medium model https://github.com/ultralytics/yolov5
+ return _create('yolov5m', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5l(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-large model https://github.com/ultralytics/yolov5
+ return _create('yolov5l', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5x(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-xlarge model https://github.com/ultralytics/yolov5
+ return _create('yolov5x', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5n6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-nano-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5n6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5s6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-small-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5s6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5m6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-medium-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5m6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5l6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-large-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5l6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5x6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-xlarge-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5x6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+if __name__ == '__main__':
+ import argparse
+ from pathlib import Path
+
+ import numpy as np
+ from PIL import Image
+
+ from utils.general import cv2, print_args
+
+ # Argparser
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--model', type=str, default='yolov5s', help='model name')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+
+ # Model
+ model = _create(name=opt.model, pretrained=True, channels=3, classes=80, autoshape=True, verbose=True)
+ # model = custom(path='path/to/model.pt') # custom
+
+ # Images
+ imgs = [
+ 'data/images/zidane.jpg', # filename
+ Path('data/images/zidane.jpg'), # Path
+ 'https://ultralytics.com/images/zidane.jpg', # URI
+ cv2.imread('data/images/bus.jpg')[:, :, ::-1], # OpenCV
+ Image.open('data/images/bus.jpg'), # PIL
+ np.zeros((320, 640, 3))] # numpy
+
+ # Inference
+ results = model(imgs, size=320) # batched inference
+
+ # Results
+ results.print()
+ results.save()
diff --git a/yolov7_seg/det/models/__init__.py b/yolov7_seg/det/models/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/yolov7_seg/det/models/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/yolov7_seg/det/models/common.py b/yolov7_seg/det/models/common.py
new file mode 100644
index 000000000..91181176d
--- /dev/null
+++ b/yolov7_seg/det/models/common.py
@@ -0,0 +1,842 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Common modules
+"""
+
+import json
+import math
+import platform
+import warnings
+from collections import OrderedDict, namedtuple
+from copy import copy
+from pathlib import Path
+
+import cv2
+import numpy as np
+import pandas as pd
+import requests
+import torch
+import torch.nn as nn
+from PIL import Image
+from torch.cuda import amp
+
+from utils.dataloaders import exif_transpose, letterbox
+from utils.general import (LOGGER, ROOT, check_requirements, check_suffix, check_version, colorstr, increment_path,
+ make_divisible, non_max_suppression, scale_coords, xywh2xyxy, xyxy2xywh, yaml_load)
+from utils.plots import Annotator, colors, save_one_box
+from utils.torch_utils import copy_attr, smart_inference_mode, time_sync
+
+
+def autopad(k, p=None): # kernel, padding
+ # Pad to 'same'
+ if p is None:
+ p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
+ return p
+
+
+class ImplicitA(nn.Module):
+ def __init__(self, channel):
+ super(ImplicitA, self).__init__()
+ self.channel = channel
+ self.implicit = nn.Parameter(torch.zeros(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, std=.02)
+
+ def forward(self, x):
+ return self.implicit + x
+
+
+class ImplicitM(nn.Module):
+ def __init__(self, channel):
+ super(ImplicitM, self).__init__()
+ self.channel = channel
+ self.implicit = nn.Parameter(torch.ones(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=1., std=.02)
+
+ def forward(self, x):
+ return self.implicit * x
+
+
+class MP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, k=2):
+ super(MP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class SP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, k=3, s=1):
+ super(SP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=s, padding=k // 2)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class ReOrg(nn.Module):
+ def __init__(self):
+ super(ReOrg, self).__init__()
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1)
+
+
+class Conv(nn.Module):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ def forward(self, x):
+ return self.act(self.bn(self.conv(x)))
+
+ def forward_fuse(self, x):
+ return self.act(self.conv(x))
+
+
+class DWConv(Conv):
+ # Depth-wise convolution class
+ def __init__(self, c1, c2, k=1, s=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__(c1, c2, k, s, g=math.gcd(c1, c2), act=act)
+
+
+class DWConvTranspose2d(nn.ConvTranspose2d):
+ # Depth-wise transpose convolution class
+ def __init__(self, c1, c2, k=1, s=1, p1=0, p2=0): # ch_in, ch_out, kernel, stride, padding, padding_out
+ super().__init__(c1, c2, k, s, p1, p2, groups=math.gcd(c1, c2))
+
+
+class TransformerLayer(nn.Module):
+ # Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance)
+ def __init__(self, c, num_heads):
+ super().__init__()
+ self.q = nn.Linear(c, c, bias=False)
+ self.k = nn.Linear(c, c, bias=False)
+ self.v = nn.Linear(c, c, bias=False)
+ self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads)
+ self.fc1 = nn.Linear(c, c, bias=False)
+ self.fc2 = nn.Linear(c, c, bias=False)
+
+ def forward(self, x):
+ x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x
+ x = self.fc2(self.fc1(x)) + x
+ return x
+
+
+class TransformerBlock(nn.Module):
+ # Vision Transformer https://arxiv.org/abs/2010.11929
+ def __init__(self, c1, c2, num_heads, num_layers):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+ self.linear = nn.Linear(c2, c2) # learnable position embedding
+ self.tr = nn.Sequential(*(TransformerLayer(c2, num_heads) for _ in range(num_layers)))
+ self.c2 = c2
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ b, _, w, h = x.shape
+ p = x.flatten(2).permute(2, 0, 1)
+ return self.tr(p + self.linear(p)).permute(1, 2, 0).reshape(b, self.c2, w, h)
+
+
+class Bottleneck(nn.Module):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2, 3, 1, g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class BottleneckCSP(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False)
+ self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(cv2, cv3)
+ self.act = nn.SiLU()
+ self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(self.act(self.bn(torch.cat((y1, y2), 1))))
+
+
+class CrossConv(nn.Module):
+ # Cross Convolution Downsample
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False):
+ # ch_in, ch_out, kernel, stride, groups, expansion, shortcut
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, (1, k), (1, s))
+ self.cv2 = Conv(c_, c2, (k, 1), (s, 1), g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class C3(nn.Module):
+ # CSP Bottleneck with 3 convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)
+ self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
+
+ def forward(self, x):
+ return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))
+
+
+class C3x(C3):
+ # C3 module with cross-convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = nn.Sequential(*(CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)))
+
+
+class C3TR(C3):
+ # C3 module with TransformerBlock()
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = TransformerBlock(c_, c_, 4, n)
+
+
+class C3SPP(C3):
+ # C3 module with SPP()
+ def __init__(self, c1, c2, k=(5, 9, 13), n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = SPP(c_, c_, k)
+
+
+class C3Ghost(C3):
+ # C3 module with GhostBottleneck()
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*(GhostBottleneck(c_, c_) for _ in range(n)))
+
+
+class SPP(nn.Module):
+ # Spatial Pyramid Pooling (SPP) layer https://arxiv.org/abs/1406.4729
+ def __init__(self, c1, c2, k=(5, 9, 13)):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+
+ def forward(self, x):
+ x = self.cv1(x)
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
+ return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))
+
+
+class SPPF(nn.Module):
+ # Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
+ def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * 4, c2, 1, 1)
+ self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(torch.cat((x, y1, y2, self.m(y2)), 1))
+
+
+class SPPCSPC(nn.Module):
+ # CSP SPP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super(SPPCSPC, self).__init__()
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 1)
+ self.cv4 = Conv(c_, c_, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+ self.cv5 = Conv(4 * c_, c_, 1, 1)
+ self.cv6 = Conv(c_, c_, 3, 1)
+ self.cv7 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x1 = self.cv4(self.cv3(self.cv1(x)))
+ y1 = self.cv6(self.cv5(torch.cat([x1] + [m(x1) for m in self.m], 1)))
+ y2 = self.cv2(x)
+ return self.cv7(torch.cat((y1, y2), dim=1))
+
+
+class Focus(nn.Module):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
+ # self.contract = Contract(gain=2)
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return self.conv(torch.cat((x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]), 1))
+ # return self.conv(self.contract(x))
+
+
+class GhostConv(nn.Module):
+ # Ghost Convolution https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
+ super().__init__()
+ c_ = c2 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, k, s, None, g, act)
+ self.cv2 = Conv(c_, c_, 5, 1, None, c_, act)
+
+ def forward(self, x):
+ y = self.cv1(x)
+ return torch.cat((y, self.cv2(y)), 1)
+
+
+class GhostBottleneck(nn.Module):
+ # Ghost Bottleneck https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride
+ super().__init__()
+ c_ = c2 // 2
+ self.conv = nn.Sequential(
+ GhostConv(c1, c_, 1, 1), # pw
+ DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw
+ GhostConv(c_, c2, 1, 1, act=False)) # pw-linear
+ self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False), Conv(c1, c2, 1, 1,
+ act=False)) if s == 2 else nn.Identity()
+
+ def forward(self, x):
+ return self.conv(x) + self.shortcut(x)
+
+
+class Contract(nn.Module):
+ # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ b, c, h, w = x.size() # assert (h / s == 0) and (W / s == 0), 'Indivisible gain'
+ s = self.gain
+ x = x.view(b, c, h // s, s, w // s, s) # x(1,64,40,2,40,2)
+ x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
+ return x.view(b, c * s * s, h // s, w // s) # x(1,256,40,40)
+
+
+class Expand(nn.Module):
+ # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ b, c, h, w = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
+ s = self.gain
+ x = x.view(b, s, s, c // s ** 2, h, w) # x(1,2,2,16,80,80)
+ x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
+ return x.view(b, c // s ** 2, h * s, w * s) # x(1,16,160,160)
+
+
+class Concat(nn.Module):
+ # Concatenate a list of tensors along dimension
+ def __init__(self, dimension=1):
+ super().__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return torch.cat(x, self.d)
+
+
+class DetectMultiBackend(nn.Module):
+ # YOLOv5 MultiBackend class for python inference on various backends
+ def __init__(self, weights='yolov5s.pt', device=torch.device('cpu'), dnn=False, data=None, fp16=False, fuse=True):
+ # Usage:
+ # PyTorch: weights = *.pt
+ # TorchScript: *.torchscript
+ # ONNX Runtime: *.onnx
+ # ONNX OpenCV DNN: *.onnx with --dnn
+ # OpenVINO: *.xml
+ # CoreML: *.mlmodel
+ # TensorRT: *.engine
+ # TensorFlow SavedModel: *_saved_model
+ # TensorFlow GraphDef: *.pb
+ # TensorFlow Lite: *.tflite
+ # TensorFlow Edge TPU: *_edgetpu.tflite
+ from models.experimental import attempt_download, attempt_load # scoped to avoid circular import
+
+ super().__init__()
+ w = str(weights[0] if isinstance(weights, list) else weights)
+ pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs = self._model_type(w) # get backend
+ w = attempt_download(w) # download if not local
+ fp16 &= pt or jit or onnx or engine # FP16
+ stride = 32 # default stride
+
+ if pt: # PyTorch
+ model = attempt_load(weights if isinstance(weights, list) else w, device=device, inplace=True, fuse=fuse)
+ stride = max(int(model.stride.max()), 32) # model stride
+ names = model.module.names if hasattr(model, 'module') else model.names # get class names
+ model.half() if fp16 else model.float()
+ self.model = model # explicitly assign for to(), cpu(), cuda(), half()
+ elif jit: # TorchScript
+ LOGGER.info(f'Loading {w} for TorchScript inference...')
+ extra_files = {'config.txt': ''} # model metadata
+ model = torch.jit.load(w, _extra_files=extra_files)
+ model.half() if fp16 else model.float()
+ if extra_files['config.txt']:
+ d = json.loads(extra_files['config.txt']) # extra_files dict
+ stride, names = int(d['stride']), d['names']
+ elif dnn: # ONNX OpenCV DNN
+ LOGGER.info(f'Loading {w} for ONNX OpenCV DNN inference...')
+ check_requirements(('opencv-python>=4.5.4',))
+ net = cv2.dnn.readNetFromONNX(w)
+ elif onnx: # ONNX Runtime
+ LOGGER.info(f'Loading {w} for ONNX Runtime inference...')
+ cuda = torch.cuda.is_available() and device.type != 'cpu'
+ check_requirements(('onnx', 'onnxruntime-gpu' if cuda else 'onnxruntime'))
+ import onnxruntime
+ providers = ['CUDAExecutionProvider', 'CPUExecutionProvider'] if cuda else ['CPUExecutionProvider']
+ session = onnxruntime.InferenceSession(w, providers=providers)
+ meta = session.get_modelmeta().custom_metadata_map # metadata
+ if 'stride' in meta:
+ stride, names = int(meta['stride']), eval(meta['names'])
+ elif xml: # OpenVINO
+ LOGGER.info(f'Loading {w} for OpenVINO inference...')
+ check_requirements(('openvino',)) # requires openvino-dev: https://pypi.org/project/openvino-dev/
+ from openvino.runtime import Core, Layout, get_batch
+ ie = Core()
+ if not Path(w).is_file(): # if not *.xml
+ w = next(Path(w).glob('*.xml')) # get *.xml file from *_openvino_model dir
+ network = ie.read_model(model=w, weights=Path(w).with_suffix('.bin'))
+ if network.get_parameters()[0].get_layout().empty:
+ network.get_parameters()[0].set_layout(Layout("NCHW"))
+ batch_dim = get_batch(network)
+ if batch_dim.is_static:
+ batch_size = batch_dim.get_length()
+ executable_network = ie.compile_model(network, device_name="CPU") # device_name="MYRIAD" for Intel NCS2
+ output_layer = next(iter(executable_network.outputs))
+ meta = Path(w).with_suffix('.yaml')
+ if meta.exists():
+ stride, names = self._load_metadata(meta) # load metadata
+ elif engine: # TensorRT
+ LOGGER.info(f'Loading {w} for TensorRT inference...')
+ import tensorrt as trt # https://developer.nvidia.com/nvidia-tensorrt-download
+ check_version(trt.__version__, '7.0.0', hard=True) # require tensorrt>=7.0.0
+ if device.type == 'cpu':
+ device = torch.device('cuda:0')
+ Binding = namedtuple('Binding', ('name', 'dtype', 'shape', 'data', 'ptr'))
+ logger = trt.Logger(trt.Logger.INFO)
+ with open(w, 'rb') as f, trt.Runtime(logger) as runtime:
+ model = runtime.deserialize_cuda_engine(f.read())
+ context = model.create_execution_context()
+ bindings = OrderedDict()
+ fp16 = False # default updated below
+ dynamic = False
+ for index in range(model.num_bindings):
+ name = model.get_binding_name(index)
+ dtype = trt.nptype(model.get_binding_dtype(index))
+ if model.binding_is_input(index):
+ if -1 in tuple(model.get_binding_shape(index)): # dynamic
+ dynamic = True
+ context.set_binding_shape(index, tuple(model.get_profile_shape(0, index)[2]))
+ if dtype == np.float16:
+ fp16 = True
+ shape = tuple(context.get_binding_shape(index))
+ im = torch.from_numpy(np.empty(shape, dtype=dtype)).to(device)
+ bindings[name] = Binding(name, dtype, shape, im, int(im.data_ptr()))
+ binding_addrs = OrderedDict((n, d.ptr) for n, d in bindings.items())
+ batch_size = bindings['images'].shape[0] # if dynamic, this is instead max batch size
+ elif coreml: # CoreML
+ LOGGER.info(f'Loading {w} for CoreML inference...')
+ import coremltools as ct
+ model = ct.models.MLModel(w)
+ else: # TensorFlow (SavedModel, GraphDef, Lite, Edge TPU)
+ if saved_model: # SavedModel
+ LOGGER.info(f'Loading {w} for TensorFlow SavedModel inference...')
+ import tensorflow as tf
+ keras = False # assume TF1 saved_model
+ model = tf.keras.models.load_model(w) if keras else tf.saved_model.load(w)
+ elif pb: # GraphDef https://www.tensorflow.org/guide/migrate#a_graphpb_or_graphpbtxt
+ LOGGER.info(f'Loading {w} for TensorFlow GraphDef inference...')
+ import tensorflow as tf
+
+ def wrap_frozen_graph(gd, inputs, outputs):
+ x = tf.compat.v1.wrap_function(lambda: tf.compat.v1.import_graph_def(gd, name=""), []) # wrapped
+ ge = x.graph.as_graph_element
+ return x.prune(tf.nest.map_structure(ge, inputs), tf.nest.map_structure(ge, outputs))
+
+ gd = tf.Graph().as_graph_def() # graph_def
+ with open(w, 'rb') as f:
+ gd.ParseFromString(f.read())
+ frozen_func = wrap_frozen_graph(gd, inputs="x:0", outputs="Identity:0")
+ elif tflite or edgetpu: # https://www.tensorflow.org/lite/guide/python#install_tensorflow_lite_for_python
+ try: # https://coral.ai/docs/edgetpu/tflite-python/#update-existing-tf-lite-code-for-the-edge-tpu
+ from tflite_runtime.interpreter import Interpreter, load_delegate
+ except ImportError:
+ import tensorflow as tf
+ Interpreter, load_delegate = tf.lite.Interpreter, tf.lite.experimental.load_delegate,
+ if edgetpu: # Edge TPU https://coral.ai/software/#edgetpu-runtime
+ LOGGER.info(f'Loading {w} for TensorFlow Lite Edge TPU inference...')
+ delegate = {
+ 'Linux': 'libedgetpu.so.1',
+ 'Darwin': 'libedgetpu.1.dylib',
+ 'Windows': 'edgetpu.dll'}[platform.system()]
+ interpreter = Interpreter(model_path=w, experimental_delegates=[load_delegate(delegate)])
+ else: # Lite
+ LOGGER.info(f'Loading {w} for TensorFlow Lite inference...')
+ interpreter = Interpreter(model_path=w) # load TFLite model
+ interpreter.allocate_tensors() # allocate
+ input_details = interpreter.get_input_details() # inputs
+ output_details = interpreter.get_output_details() # outputs
+ elif tfjs:
+ raise NotImplementedError('ERROR: YOLOv5 TF.js inference is not supported')
+ else:
+ raise NotImplementedError(f'ERROR: {w} is not a supported format')
+
+ # class names
+ if 'names' not in locals():
+ names = yaml_load(data)['names'] if data else [f'class{i}' for i in range(999)]
+ if names[0] == 'n01440764' and len(names) == 1000: # ImageNet
+ names = yaml_load(ROOT / 'data/ImageNet.yaml')['names'] # human-readable names
+
+ self.__dict__.update(locals()) # assign all variables to self
+
+ def forward(self, im, augment=False, visualize=False, val=False):
+ # YOLOv5 MultiBackend inference
+ b, ch, h, w = im.shape # batch, channel, height, width
+ if self.fp16 and im.dtype != torch.float16:
+ im = im.half() # to FP16
+
+ if self.pt: # PyTorch
+ y = self.model(im, augment=augment, visualize=visualize) if augment or visualize else self.model(im)
+ if isinstance(y, tuple):
+ y = y[0]
+ elif self.jit: # TorchScript
+ y = self.model(im)[0]
+ elif self.dnn: # ONNX OpenCV DNN
+ im = im.cpu().numpy() # torch to numpy
+ self.net.setInput(im)
+ y = self.net.forward()
+ elif self.onnx: # ONNX Runtime
+ im = im.cpu().numpy() # torch to numpy
+ y = self.session.run([self.session.get_outputs()[0].name], {self.session.get_inputs()[0].name: im})[0]
+ elif self.xml: # OpenVINO
+ im = im.cpu().numpy() # FP32
+ y = self.executable_network([im])[self.output_layer]
+ elif self.engine: # TensorRT
+ if self.dynamic and im.shape != self.bindings['images'].shape:
+ i_in, i_out = (self.model.get_binding_index(x) for x in ('images', 'output'))
+ self.context.set_binding_shape(i_in, im.shape) # reshape if dynamic
+ self.bindings['images'] = self.bindings['images']._replace(shape=im.shape)
+ self.bindings['output'].data.resize_(tuple(self.context.get_binding_shape(i_out)))
+ s = self.bindings['images'].shape
+ assert im.shape == s, f"input size {im.shape} {'>' if self.dynamic else 'not equal to'} max model size {s}"
+ self.binding_addrs['images'] = int(im.data_ptr())
+ self.context.execute_v2(list(self.binding_addrs.values()))
+ y = self.bindings['output'].data
+ elif self.coreml: # CoreML
+ im = im.permute(0, 2, 3, 1).cpu().numpy() # torch BCHW to numpy BHWC shape(1,320,192,3)
+ im = Image.fromarray((im[0] * 255).astype('uint8'))
+ # im = im.resize((192, 320), Image.ANTIALIAS)
+ y = self.model.predict({'image': im}) # coordinates are xywh normalized
+ if 'confidence' in y:
+ box = xywh2xyxy(y['coordinates'] * [[w, h, w, h]]) # xyxy pixels
+ conf, cls = y['confidence'].max(1), y['confidence'].argmax(1).astype(np.float)
+ y = np.concatenate((box, conf.reshape(-1, 1), cls.reshape(-1, 1)), 1)
+ else:
+ k = 'var_' + str(sorted(int(k.replace('var_', '')) for k in y)[-1]) # output key
+ y = y[k] # output
+ else: # TensorFlow (SavedModel, GraphDef, Lite, Edge TPU)
+ im = im.permute(0, 2, 3, 1).cpu().numpy() # torch BCHW to numpy BHWC shape(1,320,192,3)
+ if self.saved_model: # SavedModel
+ y = (self.model(im, training=False) if self.keras else self.model(im)).numpy()
+ elif self.pb: # GraphDef
+ y = self.frozen_func(x=self.tf.constant(im)).numpy()
+ else: # Lite or Edge TPU
+ input, output = self.input_details[0], self.output_details[0]
+ int8 = input['dtype'] == np.uint8 # is TFLite quantized uint8 model
+ if int8:
+ scale, zero_point = input['quantization']
+ im = (im / scale + zero_point).astype(np.uint8) # de-scale
+ self.interpreter.set_tensor(input['index'], im)
+ self.interpreter.invoke()
+ y = self.interpreter.get_tensor(output['index'])
+ if int8:
+ scale, zero_point = output['quantization']
+ y = (y.astype(np.float32) - zero_point) * scale # re-scale
+ y[..., :4] *= [w, h, w, h] # xywh normalized to pixels
+
+ if isinstance(y, np.ndarray):
+ y = torch.tensor(y, device=self.device)
+ return (y, []) if val else y
+
+ def warmup(self, imgsz=(1, 3, 640, 640)):
+ # Warmup model by running inference once
+ warmup_types = self.pt, self.jit, self.onnx, self.engine, self.saved_model, self.pb
+ if any(warmup_types) and self.device.type != 'cpu':
+ im = torch.zeros(*imgsz, dtype=torch.half if self.fp16 else torch.float, device=self.device) # input
+ for _ in range(2 if self.jit else 1): #
+ self.forward(im) # warmup
+
+ @staticmethod
+ def _model_type(p='path/to/model.pt'):
+ # Return model type from model path, i.e. path='path/to/model.onnx' -> type=onnx
+ from export import export_formats
+ suffixes = list(export_formats().Suffix) + ['.xml'] # export suffixes
+ check_suffix(p, suffixes) # checks
+ p = Path(p).name # eliminate trailing separators
+ pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs, xml2 = (s in p for s in suffixes)
+ xml |= xml2 # *_openvino_model or *.xml
+ tflite &= not edgetpu # *.tflite
+ return pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs
+
+ @staticmethod
+ def _load_metadata(f='path/to/meta.yaml'):
+ # Load metadata from meta.yaml if it exists
+ d = yaml_load(f)
+ return d['stride'], d['names'] # assign stride, names
+
+
+class AutoShape(nn.Module):
+ # YOLOv5 input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS
+ conf = 0.25 # NMS confidence threshold
+ iou = 0.45 # NMS IoU threshold
+ agnostic = False # NMS class-agnostic
+ multi_label = False # NMS multiple labels per box
+ classes = None # (optional list) filter by class, i.e. = [0, 15, 16] for COCO persons, cats and dogs
+ max_det = 1000 # maximum number of detections per image
+ amp = False # Automatic Mixed Precision (AMP) inference
+
+ def __init__(self, model, verbose=True):
+ super().__init__()
+ if verbose:
+ LOGGER.info('Adding AutoShape... ')
+ copy_attr(self, model, include=('yaml', 'nc', 'hyp', 'names', 'stride', 'abc'), exclude=()) # copy attributes
+ self.dmb = isinstance(model, DetectMultiBackend) # DetectMultiBackend() instance
+ self.pt = not self.dmb or model.pt # PyTorch model
+ self.model = model.eval()
+ if self.pt:
+ m = self.model.model.model[-1] if self.dmb else self.model.model[-1] # Detect()
+ m.inplace = False # Detect.inplace=False for safe multithread inference
+
+ def _apply(self, fn):
+ # Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers
+ self = super()._apply(fn)
+ if self.pt:
+ m = self.model.model.model[-1] if self.dmb else self.model.model[-1] # Detect()
+ m.stride = fn(m.stride)
+ m.grid = list(map(fn, m.grid))
+ if isinstance(m.anchor_grid, list):
+ m.anchor_grid = list(map(fn, m.anchor_grid))
+ return self
+
+ @smart_inference_mode()
+ def forward(self, imgs, size=640, augment=False, profile=False):
+ # Inference from various sources. For height=640, width=1280, RGB images example inputs are:
+ # file: imgs = 'data/images/zidane.jpg' # str or PosixPath
+ # URI: = 'https://ultralytics.com/images/zidane.jpg'
+ # OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3)
+ # PIL: = Image.open('image.jpg') or ImageGrab.grab() # HWC x(640,1280,3)
+ # numpy: = np.zeros((640,1280,3)) # HWC
+ # torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values)
+ # multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images
+
+ t = [time_sync()]
+ p = next(self.model.parameters()) if self.pt else torch.zeros(1, device=self.model.device) # for device, type
+ autocast = self.amp and (p.device.type != 'cpu') # Automatic Mixed Precision (AMP) inference
+ if isinstance(imgs, torch.Tensor): # torch
+ with amp.autocast(autocast):
+ return self.model(imgs.to(p.device).type_as(p), augment, profile) # inference
+
+ # Pre-process
+ n, imgs = (len(imgs), list(imgs)) if isinstance(imgs, (list, tuple)) else (1, [imgs]) # number, list of images
+ shape0, shape1, files = [], [], [] # image and inference shapes, filenames
+ for i, im in enumerate(imgs):
+ f = f'image{i}' # filename
+ if isinstance(im, (str, Path)): # filename or uri
+ im, f = Image.open(requests.get(im, stream=True).raw if str(im).startswith('http') else im), im
+ im = np.asarray(exif_transpose(im))
+ elif isinstance(im, Image.Image): # PIL Image
+ im, f = np.asarray(exif_transpose(im)), getattr(im, 'filename', f) or f
+ files.append(Path(f).with_suffix('.jpg').name)
+ if im.shape[0] < 5: # image in CHW
+ im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1)
+ im = im[..., :3] if im.ndim == 3 else np.tile(im[..., None], 3) # enforce 3ch input
+ s = im.shape[:2] # HWC
+ shape0.append(s) # image shape
+ g = (size / max(s)) # gain
+ shape1.append([y * g for y in s])
+ imgs[i] = im if im.data.contiguous else np.ascontiguousarray(im) # update
+ shape1 = [make_divisible(x, self.stride) if self.pt else size for x in np.array(shape1).max(0)] # inf shape
+ x = [letterbox(im, shape1, auto=False)[0] for im in imgs] # pad
+ x = np.ascontiguousarray(np.array(x).transpose((0, 3, 1, 2))) # stack and BHWC to BCHW
+ x = torch.from_numpy(x).to(p.device).type_as(p) / 255 # uint8 to fp16/32
+ t.append(time_sync())
+
+ with amp.autocast(autocast):
+ # Inference
+ y = self.model(x, augment, profile) # forward
+ t.append(time_sync())
+
+ # Post-process
+ y = non_max_suppression(y if self.dmb else y[0],
+ self.conf,
+ self.iou,
+ self.classes,
+ self.agnostic,
+ self.multi_label,
+ max_det=self.max_det) # NMS
+ for i in range(n):
+ scale_coords(shape1, y[i][:, :4], shape0[i])
+
+ t.append(time_sync())
+ return Detections(imgs, y, files, t, self.names, x.shape)
+
+
+class Detections:
+ # YOLOv5 detections class for inference results
+ def __init__(self, imgs, pred, files, times=(0, 0, 0, 0), names=None, shape=None):
+ super().__init__()
+ d = pred[0].device # device
+ gn = [torch.tensor([*(im.shape[i] for i in [1, 0, 1, 0]), 1, 1], device=d) for im in imgs] # normalizations
+ self.imgs = imgs # list of images as numpy arrays
+ self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls)
+ self.names = names # class names
+ self.files = files # image filenames
+ self.times = times # profiling times
+ self.xyxy = pred # xyxy pixels
+ self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels
+ self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized
+ self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized
+ self.n = len(self.pred) # number of images (batch size)
+ self.t = tuple((times[i + 1] - times[i]) * 1000 / self.n for i in range(3)) # timestamps (ms)
+ self.s = shape # inference BCHW shape
+
+ def display(self, pprint=False, show=False, save=False, crop=False, render=False, labels=True, save_dir=Path('')):
+ crops = []
+ for i, (im, pred) in enumerate(zip(self.imgs, self.pred)):
+ s = f'image {i + 1}/{len(self.pred)}: {im.shape[0]}x{im.shape[1]} ' # string
+ if pred.shape[0]:
+ for c in pred[:, -1].unique():
+ n = (pred[:, -1] == c).sum() # detections per class
+ s += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string
+ if show or save or render or crop:
+ annotator = Annotator(im, example=str(self.names))
+ for *box, conf, cls in reversed(pred): # xyxy, confidence, class
+ label = f'{self.names[int(cls)]} {conf:.2f}'
+ if crop:
+ file = save_dir / 'crops' / self.names[int(cls)] / self.files[i] if save else None
+ crops.append({
+ 'box': box,
+ 'conf': conf,
+ 'cls': cls,
+ 'label': label,
+ 'im': save_one_box(box, im, file=file, save=save)})
+ else: # all others
+ annotator.box_label(box, label if labels else '', color=colors(cls))
+ im = annotator.im
+ else:
+ s += '(no detections)'
+
+ im = Image.fromarray(im.astype(np.uint8)) if isinstance(im, np.ndarray) else im # from np
+ if pprint:
+ print(s.rstrip(', '))
+ if show:
+ im.show(self.files[i]) # show
+ if save:
+ f = self.files[i]
+ im.save(save_dir / f) # save
+ if i == self.n - 1:
+ LOGGER.info(f"Saved {self.n} image{'s' * (self.n > 1)} to {colorstr('bold', save_dir)}")
+ if render:
+ self.imgs[i] = np.asarray(im)
+ if crop:
+ if save:
+ LOGGER.info(f'Saved results to {save_dir}\n')
+ return crops
+
+ def print(self):
+ self.display(pprint=True) # print results
+ print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {tuple(self.s)}' % self.t)
+
+ def show(self, labels=True):
+ self.display(show=True, labels=labels) # show results
+
+ def save(self, labels=True, save_dir='runs/detect/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) # increment save_dir
+ self.display(save=True, labels=labels, save_dir=save_dir) # save results
+
+ def crop(self, save=True, save_dir='runs/detect/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) if save else None
+ return self.display(crop=True, save=save, save_dir=save_dir) # crop results
+
+ def render(self, labels=True):
+ self.display(render=True, labels=labels) # render results
+ return self.imgs
+
+ def pandas(self):
+ # return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0])
+ new = copy(self) # return copy
+ ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns
+ cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns
+ for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]):
+ a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update
+ setattr(new, k, [pd.DataFrame(x, columns=c) for x in a])
+ return new
+
+ def tolist(self):
+ # return a list of Detections objects, i.e. 'for result in results.tolist():'
+ r = range(self.n) # iterable
+ x = [Detections([self.imgs[i]], [self.pred[i]], [self.files[i]], self.times, self.names, self.s) for i in r]
+ # for d in x:
+ # for k in ['imgs', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']:
+ # setattr(d, k, getattr(d, k)[0]) # pop out of list
+ return x
+
+ def __len__(self):
+ return self.n # override len(results)
+
+ def __str__(self):
+ self.print() # override print(results)
+ return ''
+
+
+class Classify(nn.Module):
+ # Classification head, i.e. x(b,c1,20,20) to x(b,c2)
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ c_ = 1280 # efficientnet_b0 size
+ self.conv = Conv(c1, c_, k, s, autopad(k, p), g)
+ self.pool = nn.AdaptiveAvgPool2d(1) # to x(b,c_,1,1)
+ self.drop = nn.Dropout(p=0.0, inplace=True)
+ self.linear = nn.Linear(c_, c2) # to x(b,c2)
+
+ def forward(self, x):
+ if isinstance(x, list):
+ x = torch.cat(x, 1)
+ return self.linear(self.drop(self.pool(self.conv(x)).flatten(1)))
diff --git a/yolov7_seg/det/models/experimental.py b/yolov7_seg/det/models/experimental.py
new file mode 100644
index 000000000..d5a037248
--- /dev/null
+++ b/yolov7_seg/det/models/experimental.py
@@ -0,0 +1,107 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Experimental modules
+"""
+import math
+
+import numpy as np
+import torch
+import torch.nn as nn
+
+from models.common import Conv
+from utils.downloads import attempt_download
+
+
+class Sum(nn.Module):
+ # Weighted sum of 2 or more layers https://arxiv.org/abs/1911.09070
+ def __init__(self, n, weight=False): # n: number of inputs
+ super().__init__()
+ self.weight = weight # apply weights boolean
+ self.iter = range(n - 1) # iter object
+ if weight:
+ self.w = nn.Parameter(-torch.arange(1.0, n) / 2, requires_grad=True) # layer weights
+
+ def forward(self, x):
+ y = x[0] # no weight
+ if self.weight:
+ w = torch.sigmoid(self.w) * 2
+ for i in self.iter:
+ y = y + x[i + 1] * w[i]
+ else:
+ for i in self.iter:
+ y = y + x[i + 1]
+ return y
+
+
+class MixConv2d(nn.Module):
+ # Mixed Depth-wise Conv https://arxiv.org/abs/1907.09595
+ def __init__(self, c1, c2, k=(1, 3), s=1, equal_ch=True): # ch_in, ch_out, kernel, stride, ch_strategy
+ super().__init__()
+ n = len(k) # number of convolutions
+ if equal_ch: # equal c_ per group
+ i = torch.linspace(0, n - 1E-6, c2).floor() # c2 indices
+ c_ = [(i == g).sum() for g in range(n)] # intermediate channels
+ else: # equal weight.numel() per group
+ b = [c2] + [0] * n
+ a = np.eye(n + 1, n, k=-1)
+ a -= np.roll(a, 1, axis=1)
+ a *= np.array(k) ** 2
+ a[0] = 1
+ c_ = np.linalg.lstsq(a, b, rcond=None)[0].round() # solve for equal weight indices, ax = b
+
+ self.m = nn.ModuleList([
+ nn.Conv2d(c1, int(c_), k, s, k // 2, groups=math.gcd(c1, int(c_)), bias=False) for k, c_ in zip(k, c_)])
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU()
+
+ def forward(self, x):
+ return self.act(self.bn(torch.cat([m(x) for m in self.m], 1)))
+
+
+class Ensemble(nn.ModuleList):
+ # Ensemble of models
+ def __init__(self):
+ super().__init__()
+
+ def forward(self, x, augment=False, profile=False, visualize=False):
+ y = [module(x, augment, profile, visualize)[0] for module in self]
+ # y = torch.stack(y).max(0)[0] # max ensemble
+ # y = torch.stack(y).mean(0) # mean ensemble
+ y = torch.cat(y, 1) # nms ensemble
+ return y, None # inference, train output
+
+
+def attempt_load(weights, device=None, inplace=True, fuse=True):
+ # Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a
+ from models.yolo import Detect, Model
+
+ model = Ensemble()
+ for w in weights if isinstance(weights, list) else [weights]:
+ ckpt = torch.load(attempt_download(w), map_location='cpu') # load
+ ckpt = (ckpt.get('ema') or ckpt['model']).to(device).float() # FP32 model
+ if not hasattr(ckpt, 'stride'):
+ ckpt.stride = torch.tensor([32.]) # compatibility update for ResNet etc.
+ model.append(ckpt.fuse().eval() if fuse and hasattr(ckpt, 'fuse') else ckpt.eval()) # model in eval mode
+
+ # Compatibility updates
+ for m in model.modules():
+ t = type(m)
+ if t in (nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU, Detect, Model):
+ m.inplace = inplace # torch 1.7.0 compatibility
+ if t is Detect and not isinstance(m.anchor_grid, list):
+ delattr(m, 'anchor_grid')
+ setattr(m, 'anchor_grid', [torch.zeros(1)] * m.nl)
+ elif t is nn.Upsample and not hasattr(m, 'recompute_scale_factor'):
+ m.recompute_scale_factor = None # torch 1.11.0 compatibility
+
+ # Return model
+ if len(model) == 1:
+ return model[-1]
+
+ # Return detection ensemble
+ print(f'Ensemble created with {weights}\n')
+ for k in 'names', 'nc', 'yaml':
+ setattr(model, k, getattr(model[0], k))
+ model.stride = model[torch.argmax(torch.tensor([m.stride.max() for m in model])).int()].stride # max stride
+ assert all(model[0].nc == m.nc for m in model), f'Models have different class counts: {[m.nc for m in model]}'
+ return model
diff --git a/yolov7_seg/det/models/hub/yolov3-spp.yaml b/yolov7_seg/det/models/hub/yolov3-spp.yaml
new file mode 100644
index 000000000..299d76669
--- /dev/null
+++ b/yolov7_seg/det/models/hub/yolov3-spp.yaml
@@ -0,0 +1,51 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,13, 16,30, 33,23] # P3/8
+ - [30,61, 62,45, 59,119] # P4/16
+ - [116,90, 156,198, 373,326] # P5/32
+
+# darknet53 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Bottleneck, [64]],
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 2, Bottleneck, [128]],
+ [-1, 1, Conv, [256, 3, 2]], # 5-P3/8
+ [-1, 8, Bottleneck, [256]],
+ [-1, 1, Conv, [512, 3, 2]], # 7-P4/16
+ [-1, 8, Bottleneck, [512]],
+ [-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
+ [-1, 4, Bottleneck, [1024]], # 10
+ ]
+
+# YOLOv3-SPP head
+head:
+ [[-1, 1, Bottleneck, [1024, False]],
+ [-1, 1, SPP, [512, [5, 9, 13]]],
+ [-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 6], 1, Concat, [1]], # cat backbone P3
+ [-1, 1, Bottleneck, [256, False]],
+ [-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)
+
+ [[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
+ ]
diff --git a/yolov7_seg/det/models/hub/yolov3-tiny.yaml b/yolov7_seg/det/models/hub/yolov3-tiny.yaml
new file mode 100644
index 000000000..f9ac6b177
--- /dev/null
+++ b/yolov7_seg/det/models/hub/yolov3-tiny.yaml
@@ -0,0 +1,41 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,14, 23,27, 37,58] # P4/16
+ - [81,82, 135,169, 344,319] # P5/32
+
+# YOLOv3-tiny backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [16, 3, 1]], # 0
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 1-P1/2
+ [-1, 1, Conv, [32, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 3-P2/4
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 5-P3/8
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 7-P4/16
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 9-P5/32
+ [-1, 1, Conv, [512, 3, 1]],
+ [-1, 1, nn.ZeroPad2d, [[0, 1, 0, 1]]], # 11
+ [-1, 1, nn.MaxPool2d, [2, 1, 0]], # 12
+ ]
+
+# YOLOv3-tiny head
+head:
+ [[-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Conv, [256, 3, 1]], # 19 (P4/16-medium)
+
+ [[19, 15], 1, Detect, [nc, anchors]], # Detect(P4, P5)
+ ]
diff --git a/yolov7_seg/det/models/hub/yolov3.yaml b/yolov7_seg/det/models/hub/yolov3.yaml
new file mode 100644
index 000000000..22b29d22c
--- /dev/null
+++ b/yolov7_seg/det/models/hub/yolov3.yaml
@@ -0,0 +1,51 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,13, 16,30, 33,23] # P3/8
+ - [30,61, 62,45, 59,119] # P4/16
+ - [116,90, 156,198, 373,326] # P5/32
+
+# darknet53 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Bottleneck, [64]],
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 2, Bottleneck, [128]],
+ [-1, 1, Conv, [256, 3, 2]], # 5-P3/8
+ [-1, 8, Bottleneck, [256]],
+ [-1, 1, Conv, [512, 3, 2]], # 7-P4/16
+ [-1, 8, Bottleneck, [512]],
+ [-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
+ [-1, 4, Bottleneck, [1024]], # 10
+ ]
+
+# YOLOv3 head
+head:
+ [[-1, 1, Bottleneck, [1024, False]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 6], 1, Concat, [1]], # cat backbone P3
+ [-1, 1, Bottleneck, [256, False]],
+ [-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)
+
+ [[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
+ ]
diff --git a/yolov7_seg/det/models/tf.py b/yolov7_seg/det/models/tf.py
new file mode 100644
index 000000000..fb2cf814a
--- /dev/null
+++ b/yolov7_seg/det/models/tf.py
@@ -0,0 +1,574 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+TensorFlow, Keras and TFLite versions of YOLOv5
+Authored by https://github.com/zldrobit in PR https://github.com/ultralytics/yolov5/pull/1127
+
+Usage:
+ $ python models/tf.py --weights yolov5s.pt
+
+Export:
+ $ python path/to/export.py --weights yolov5s.pt --include saved_model pb tflite tfjs
+"""
+
+import argparse
+import sys
+from copy import deepcopy
+from pathlib import Path
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+# ROOT = ROOT.relative_to(Path.cwd()) # relative
+
+import numpy as np
+import tensorflow as tf
+import torch
+import torch.nn as nn
+from tensorflow import keras
+
+from models.common import (C3, SPP, SPPF, Bottleneck, BottleneckCSP, C3x, Concat, Conv, CrossConv, DWConv,
+ DWConvTranspose2d, Focus, autopad)
+from models.experimental import MixConv2d, attempt_load
+from models.yolo import Detect
+from utils.activations import SiLU
+from utils.general import LOGGER, make_divisible, print_args
+
+
+class TFBN(keras.layers.Layer):
+ # TensorFlow BatchNormalization wrapper
+ def __init__(self, w=None):
+ super().__init__()
+ self.bn = keras.layers.BatchNormalization(
+ beta_initializer=keras.initializers.Constant(w.bias.numpy()),
+ gamma_initializer=keras.initializers.Constant(w.weight.numpy()),
+ moving_mean_initializer=keras.initializers.Constant(w.running_mean.numpy()),
+ moving_variance_initializer=keras.initializers.Constant(w.running_var.numpy()),
+ epsilon=w.eps)
+
+ def call(self, inputs):
+ return self.bn(inputs)
+
+
+class TFPad(keras.layers.Layer):
+ # Pad inputs in spatial dimensions 1 and 2
+ def __init__(self, pad):
+ super().__init__()
+ if isinstance(pad, int):
+ self.pad = tf.constant([[0, 0], [pad, pad], [pad, pad], [0, 0]])
+ else: # tuple/list
+ self.pad = tf.constant([[0, 0], [pad[0], pad[0]], [pad[1], pad[1]], [0, 0]])
+
+ def call(self, inputs):
+ return tf.pad(inputs, self.pad, mode='constant', constant_values=0)
+
+
+class TFConv(keras.layers.Layer):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert g == 1, "TF v2.2 Conv2D does not support 'groups' argument"
+ # TensorFlow convolution padding is inconsistent with PyTorch (e.g. k=3 s=2 'SAME' padding)
+ # see https://stackoverflow.com/questions/52975843/comparing-conv2d-with-padding-between-tensorflow-and-pytorch
+ conv = keras.layers.Conv2D(
+ filters=c2,
+ kernel_size=k,
+ strides=s,
+ padding='SAME' if s == 1 else 'VALID',
+ use_bias=not hasattr(w, 'bn'),
+ kernel_initializer=keras.initializers.Constant(w.conv.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer='zeros' if hasattr(w, 'bn') else keras.initializers.Constant(w.conv.bias.numpy()))
+ self.conv = conv if s == 1 else keras.Sequential([TFPad(autopad(k, p)), conv])
+ self.bn = TFBN(w.bn) if hasattr(w, 'bn') else tf.identity
+ self.act = activations(w.act) if act else tf.identity
+
+ def call(self, inputs):
+ return self.act(self.bn(self.conv(inputs)))
+
+
+class TFDWConv(keras.layers.Layer):
+ # Depthwise convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, act=True, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert c2 % c1 == 0, f'TFDWConv() output={c2} must be a multiple of input={c1} channels'
+ conv = keras.layers.DepthwiseConv2D(
+ kernel_size=k,
+ depth_multiplier=c2 // c1,
+ strides=s,
+ padding='SAME' if s == 1 else 'VALID',
+ use_bias=not hasattr(w, 'bn'),
+ depthwise_initializer=keras.initializers.Constant(w.conv.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer='zeros' if hasattr(w, 'bn') else keras.initializers.Constant(w.conv.bias.numpy()))
+ self.conv = conv if s == 1 else keras.Sequential([TFPad(autopad(k, p)), conv])
+ self.bn = TFBN(w.bn) if hasattr(w, 'bn') else tf.identity
+ self.act = activations(w.act) if act else tf.identity
+
+ def call(self, inputs):
+ return self.act(self.bn(self.conv(inputs)))
+
+
+class TFDWConvTranspose2d(keras.layers.Layer):
+ # Depthwise ConvTranspose2d
+ def __init__(self, c1, c2, k=1, s=1, p1=0, p2=0, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert c1 == c2, f'TFDWConv() output={c2} must be equal to input={c1} channels'
+ assert k == 4 and p1 == 1, 'TFDWConv() only valid for k=4 and p1=1'
+ weight, bias = w.weight.permute(2, 3, 1, 0).numpy(), w.bias.numpy()
+ self.c1 = c1
+ self.conv = [
+ keras.layers.Conv2DTranspose(filters=1,
+ kernel_size=k,
+ strides=s,
+ padding='VALID',
+ output_padding=p2,
+ use_bias=True,
+ kernel_initializer=keras.initializers.Constant(weight[..., i:i + 1]),
+ bias_initializer=keras.initializers.Constant(bias[i])) for i in range(c1)]
+
+ def call(self, inputs):
+ return tf.concat([m(x) for m, x in zip(self.conv, tf.split(inputs, self.c1, 3))], 3)[:, 1:-1, 1:-1]
+
+
+class TFFocus(keras.layers.Layer):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True, w=None):
+ # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = TFConv(c1 * 4, c2, k, s, p, g, act, w.conv)
+
+ def call(self, inputs): # x(b,w,h,c) -> y(b,w/2,h/2,4c)
+ # inputs = inputs / 255 # normalize 0-255 to 0-1
+ inputs = [inputs[:, ::2, ::2, :], inputs[:, 1::2, ::2, :], inputs[:, ::2, 1::2, :], inputs[:, 1::2, 1::2, :]]
+ return self.conv(tf.concat(inputs, 3))
+
+
+class TFBottleneck(keras.layers.Layer):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5, w=None): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_, c2, 3, 1, g=g, w=w.cv2)
+ self.add = shortcut and c1 == c2
+
+ def call(self, inputs):
+ return inputs + self.cv2(self.cv1(inputs)) if self.add else self.cv2(self.cv1(inputs))
+
+
+class TFCrossConv(keras.layers.Layer):
+ # Cross Convolution
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False, w=None):
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, (1, k), (1, s), w=w.cv1)
+ self.cv2 = TFConv(c_, c2, (k, 1), (s, 1), g=g, w=w.cv2)
+ self.add = shortcut and c1 == c2
+
+ def call(self, inputs):
+ return inputs + self.cv2(self.cv1(inputs)) if self.add else self.cv2(self.cv1(inputs))
+
+
+class TFConv2d(keras.layers.Layer):
+ # Substitution for PyTorch nn.Conv2D
+ def __init__(self, c1, c2, k, s=1, g=1, bias=True, w=None):
+ super().__init__()
+ assert g == 1, "TF v2.2 Conv2D does not support 'groups' argument"
+ self.conv = keras.layers.Conv2D(filters=c2,
+ kernel_size=k,
+ strides=s,
+ padding='VALID',
+ use_bias=bias,
+ kernel_initializer=keras.initializers.Constant(
+ w.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer=keras.initializers.Constant(w.bias.numpy()) if bias else None)
+
+ def call(self, inputs):
+ return self.conv(inputs)
+
+
+class TFBottleneckCSP(keras.layers.Layer):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv2d(c1, c_, 1, 1, bias=False, w=w.cv2)
+ self.cv3 = TFConv2d(c_, c_, 1, 1, bias=False, w=w.cv3)
+ self.cv4 = TFConv(2 * c_, c2, 1, 1, w=w.cv4)
+ self.bn = TFBN(w.bn)
+ self.act = lambda x: keras.activations.swish(x)
+ self.m = keras.Sequential([TFBottleneck(c_, c_, shortcut, g, e=1.0, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ y1 = self.cv3(self.m(self.cv1(inputs)))
+ y2 = self.cv2(inputs)
+ return self.cv4(self.act(self.bn(tf.concat((y1, y2), axis=3))))
+
+
+class TFC3(keras.layers.Layer):
+ # CSP Bottleneck with 3 convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c1, c_, 1, 1, w=w.cv2)
+ self.cv3 = TFConv(2 * c_, c2, 1, 1, w=w.cv3)
+ self.m = keras.Sequential([TFBottleneck(c_, c_, shortcut, g, e=1.0, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ return self.cv3(tf.concat((self.m(self.cv1(inputs)), self.cv2(inputs)), axis=3))
+
+
+class TFC3x(keras.layers.Layer):
+ # 3 module with cross-convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c1, c_, 1, 1, w=w.cv2)
+ self.cv3 = TFConv(2 * c_, c2, 1, 1, w=w.cv3)
+ self.m = keras.Sequential([
+ TFCrossConv(c_, c_, k=3, s=1, g=g, e=1.0, shortcut=shortcut, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ return self.cv3(tf.concat((self.m(self.cv1(inputs)), self.cv2(inputs)), axis=3))
+
+
+class TFSPP(keras.layers.Layer):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, k=(5, 9, 13), w=None):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_ * (len(k) + 1), c2, 1, 1, w=w.cv2)
+ self.m = [keras.layers.MaxPool2D(pool_size=x, strides=1, padding='SAME') for x in k]
+
+ def call(self, inputs):
+ x = self.cv1(inputs)
+ return self.cv2(tf.concat([x] + [m(x) for m in self.m], 3))
+
+
+class TFSPPF(keras.layers.Layer):
+ # Spatial pyramid pooling-Fast layer
+ def __init__(self, c1, c2, k=5, w=None):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_ * 4, c2, 1, 1, w=w.cv2)
+ self.m = keras.layers.MaxPool2D(pool_size=k, strides=1, padding='SAME')
+
+ def call(self, inputs):
+ x = self.cv1(inputs)
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(tf.concat([x, y1, y2, self.m(y2)], 3))
+
+
+class TFDetect(keras.layers.Layer):
+ # TF YOLOv5 Detect layer
+ def __init__(self, nc=80, anchors=(), ch=(), imgsz=(640, 640), w=None): # detection layer
+ super().__init__()
+ self.stride = tf.convert_to_tensor(w.stride.numpy(), dtype=tf.float32)
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [tf.zeros(1)] * self.nl # init grid
+ self.anchors = tf.convert_to_tensor(w.anchors.numpy(), dtype=tf.float32)
+ self.anchor_grid = tf.reshape(self.anchors * tf.reshape(self.stride, [self.nl, 1, 1]), [self.nl, 1, -1, 1, 2])
+ self.m = [TFConv2d(x, self.no * self.na, 1, w=w.m[i]) for i, x in enumerate(ch)]
+ self.training = False # set to False after building model
+ self.imgsz = imgsz
+ for i in range(self.nl):
+ ny, nx = self.imgsz[0] // self.stride[i], self.imgsz[1] // self.stride[i]
+ self.grid[i] = self._make_grid(nx, ny)
+
+ def call(self, inputs):
+ z = [] # inference output
+ x = []
+ for i in range(self.nl):
+ x.append(self.m[i](inputs[i]))
+ # x(bs,20,20,255) to x(bs,3,20,20,85)
+ ny, nx = self.imgsz[0] // self.stride[i], self.imgsz[1] // self.stride[i]
+ x[i] = tf.reshape(x[i], [-1, ny * nx, self.na, self.no])
+
+ if not self.training: # inference
+ y = tf.sigmoid(x[i])
+ grid = tf.transpose(self.grid[i], [0, 2, 1, 3]) - 0.5
+ anchor_grid = tf.transpose(self.anchor_grid[i], [0, 2, 1, 3]) * 4
+ xy = (y[..., 0:2] * 2 + grid) * self.stride[i] # xy
+ wh = y[..., 2:4] ** 2 * anchor_grid
+ # Normalize xywh to 0-1 to reduce calibration error
+ xy /= tf.constant([[self.imgsz[1], self.imgsz[0]]], dtype=tf.float32)
+ wh /= tf.constant([[self.imgsz[1], self.imgsz[0]]], dtype=tf.float32)
+ y = tf.concat([xy, wh, y[..., 4:]], -1)
+ z.append(tf.reshape(y, [-1, self.na * ny * nx, self.no]))
+
+ return tf.transpose(x, [0, 2, 1, 3]) if self.training else (tf.concat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ # yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ # return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+ xv, yv = tf.meshgrid(tf.range(nx), tf.range(ny))
+ return tf.cast(tf.reshape(tf.stack([xv, yv], 2), [1, 1, ny * nx, 2]), dtype=tf.float32)
+
+
+class TFUpsample(keras.layers.Layer):
+ # TF version of torch.nn.Upsample()
+ def __init__(self, size, scale_factor, mode, w=None): # warning: all arguments needed including 'w'
+ super().__init__()
+ assert scale_factor == 2, "scale_factor must be 2"
+ self.upsample = lambda x: tf.image.resize(x, (x.shape[1] * 2, x.shape[2] * 2), method=mode)
+ # self.upsample = keras.layers.UpSampling2D(size=scale_factor, interpolation=mode)
+ # with default arguments: align_corners=False, half_pixel_centers=False
+ # self.upsample = lambda x: tf.raw_ops.ResizeNearestNeighbor(images=x,
+ # size=(x.shape[1] * 2, x.shape[2] * 2))
+
+ def call(self, inputs):
+ return self.upsample(inputs)
+
+
+class TFConcat(keras.layers.Layer):
+ # TF version of torch.concat()
+ def __init__(self, dimension=1, w=None):
+ super().__init__()
+ assert dimension == 1, "convert only NCHW to NHWC concat"
+ self.d = 3
+
+ def call(self, inputs):
+ return tf.concat(inputs, self.d)
+
+
+def parse_model(d, ch, model, imgsz): # model_dict, input_channels(3)
+ LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m_str = m
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ try:
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+ except NameError:
+ pass
+
+ n = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in [
+ nn.Conv2d, Conv, DWConv, DWConvTranspose2d, Bottleneck, SPP, SPPF, MixConv2d, Focus, CrossConv,
+ BottleneckCSP, C3, C3x]:
+ c1, c2 = ch[f], args[0]
+ c2 = make_divisible(c2 * gw, 8) if c2 != no else c2
+
+ args = [c1, c2, *args[1:]]
+ if m in [BottleneckCSP, C3, C3x]:
+ args.insert(2, n)
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum(ch[-1 if x == -1 else x + 1] for x in f)
+ elif m is Detect:
+ args.append([ch[x + 1] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ args.append(imgsz)
+ else:
+ c2 = ch[f]
+
+ tf_m = eval('TF' + m_str.replace('nn.', ''))
+ m_ = keras.Sequential([tf_m(*args, w=model.model[i][j]) for j in range(n)]) if n > 1 \
+ else tf_m(*args, w=model.model[i]) # module
+
+ torch_m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum(x.numel() for x in torch_m_.parameters()) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ LOGGER.info(f'{i:>3}{str(f):>18}{str(n):>3}{np:>10} {t:<40}{str(args):<30}') # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ ch.append(c2)
+ return keras.Sequential(layers), sorted(save)
+
+
+class TFModel:
+ # TF YOLOv5 model
+ def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None, model=None, imgsz=(640, 640)): # model, channels, classes
+ super().__init__()
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg) as f:
+ self.yaml = yaml.load(f, Loader=yaml.FullLoader) # model dict
+
+ # Define model
+ if nc and nc != self.yaml['nc']:
+ LOGGER.info(f"Overriding {cfg} nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ self.model, self.savelist = parse_model(deepcopy(self.yaml), ch=[ch], model=model, imgsz=imgsz)
+
+ def predict(self,
+ inputs,
+ tf_nms=False,
+ agnostic_nms=False,
+ topk_per_class=100,
+ topk_all=100,
+ iou_thres=0.45,
+ conf_thres=0.25):
+ y = [] # outputs
+ x = inputs
+ for m in self.model.layers:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+
+ x = m(x) # run
+ y.append(x if m.i in self.savelist else None) # save output
+
+ # Add TensorFlow NMS
+ if tf_nms:
+ boxes = self._xywh2xyxy(x[0][..., :4])
+ probs = x[0][:, :, 4:5]
+ classes = x[0][:, :, 5:]
+ scores = probs * classes
+ if agnostic_nms:
+ nms = AgnosticNMS()((boxes, classes, scores), topk_all, iou_thres, conf_thres)
+ else:
+ boxes = tf.expand_dims(boxes, 2)
+ nms = tf.image.combined_non_max_suppression(boxes,
+ scores,
+ topk_per_class,
+ topk_all,
+ iou_thres,
+ conf_thres,
+ clip_boxes=False)
+ return nms, x[1]
+ return x[0] # output only first tensor [1,6300,85] = [xywh, conf, class0, class1, ...]
+ # x = x[0][0] # [x(1,6300,85), ...] to x(6300,85)
+ # xywh = x[..., :4] # x(6300,4) boxes
+ # conf = x[..., 4:5] # x(6300,1) confidences
+ # cls = tf.reshape(tf.cast(tf.argmax(x[..., 5:], axis=1), tf.float32), (-1, 1)) # x(6300,1) classes
+ # return tf.concat([conf, cls, xywh], 1)
+
+ @staticmethod
+ def _xywh2xyxy(xywh):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ x, y, w, h = tf.split(xywh, num_or_size_splits=4, axis=-1)
+ return tf.concat([x - w / 2, y - h / 2, x + w / 2, y + h / 2], axis=-1)
+
+
+class AgnosticNMS(keras.layers.Layer):
+ # TF Agnostic NMS
+ def call(self, input, topk_all, iou_thres, conf_thres):
+ # wrap map_fn to avoid TypeSpec related error https://stackoverflow.com/a/65809989/3036450
+ return tf.map_fn(lambda x: self._nms(x, topk_all, iou_thres, conf_thres),
+ input,
+ fn_output_signature=(tf.float32, tf.float32, tf.float32, tf.int32),
+ name='agnostic_nms')
+
+ @staticmethod
+ def _nms(x, topk_all=100, iou_thres=0.45, conf_thres=0.25): # agnostic NMS
+ boxes, classes, scores = x
+ class_inds = tf.cast(tf.argmax(classes, axis=-1), tf.float32)
+ scores_inp = tf.reduce_max(scores, -1)
+ selected_inds = tf.image.non_max_suppression(boxes,
+ scores_inp,
+ max_output_size=topk_all,
+ iou_threshold=iou_thres,
+ score_threshold=conf_thres)
+ selected_boxes = tf.gather(boxes, selected_inds)
+ padded_boxes = tf.pad(selected_boxes,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]], [0, 0]],
+ mode="CONSTANT",
+ constant_values=0.0)
+ selected_scores = tf.gather(scores_inp, selected_inds)
+ padded_scores = tf.pad(selected_scores,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]]],
+ mode="CONSTANT",
+ constant_values=-1.0)
+ selected_classes = tf.gather(class_inds, selected_inds)
+ padded_classes = tf.pad(selected_classes,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]]],
+ mode="CONSTANT",
+ constant_values=-1.0)
+ valid_detections = tf.shape(selected_inds)[0]
+ return padded_boxes, padded_scores, padded_classes, valid_detections
+
+
+def activations(act=nn.SiLU):
+ # Returns TF activation from input PyTorch activation
+ if isinstance(act, nn.LeakyReLU):
+ return lambda x: keras.activations.relu(x, alpha=0.1)
+ elif isinstance(act, nn.Hardswish):
+ return lambda x: x * tf.nn.relu6(x + 3) * 0.166666667
+ elif isinstance(act, (nn.SiLU, SiLU)):
+ return lambda x: keras.activations.swish(x)
+ else:
+ raise Exception(f'no matching TensorFlow activation found for PyTorch activation {act}')
+
+
+def representative_dataset_gen(dataset, ncalib=100):
+ # Representative dataset generator for use with converter.representative_dataset, returns a generator of np arrays
+ for n, (path, img, im0s, vid_cap, string) in enumerate(dataset):
+ im = np.transpose(img, [1, 2, 0])
+ im = np.expand_dims(im, axis=0).astype(np.float32)
+ im /= 255
+ yield [im]
+ if n >= ncalib:
+ break
+
+
+def run(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=(640, 640), # inference size h,w
+ batch_size=1, # batch size
+ dynamic=False, # dynamic batch size
+):
+ # PyTorch model
+ im = torch.zeros((batch_size, 3, *imgsz)) # BCHW image
+ model = attempt_load(weights, device=torch.device('cpu'), inplace=True, fuse=False)
+ _ = model(im) # inference
+ model.info()
+
+ # TensorFlow model
+ im = tf.zeros((batch_size, *imgsz, 3)) # BHWC image
+ tf_model = TFModel(cfg=model.yaml, model=model, nc=model.nc, imgsz=imgsz)
+ _ = tf_model.predict(im) # inference
+
+ # Keras model
+ im = keras.Input(shape=(*imgsz, 3), batch_size=None if dynamic else batch_size)
+ keras_model = keras.Model(inputs=im, outputs=tf_model.predict(im))
+ keras_model.summary()
+
+ LOGGER.info('PyTorch, TensorFlow and Keras models successfully verified.\nUse export.py for TF model export.')
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='weights path')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--dynamic', action='store_true', help='dynamic batch size')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/det/models/yolo.py b/yolov7_seg/det/models/yolo.py
new file mode 100644
index 000000000..4f17c1a70
--- /dev/null
+++ b/yolov7_seg/det/models/yolo.py
@@ -0,0 +1,416 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+YOLO-specific modules
+
+Usage:
+ $ python path/to/models/yolo.py --cfg yolov5s.yaml
+"""
+
+import argparse
+import contextlib
+import os
+import platform
+import sys
+from copy import deepcopy
+from pathlib import Path
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+if platform.system() != 'Windows':
+ ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import *
+from models.experimental import *
+from utils.autoanchor import check_anchor_order
+from utils.general import LOGGER, check_version, check_yaml, make_divisible, print_args
+from utils.plots import feature_visualization
+from utils.torch_utils import (fuse_conv_and_bn, initialize_weights, model_info, profile, scale_img, select_device,
+ time_sync)
+
+try:
+ import thop # for FLOPs computation
+except ImportError:
+ thop = None
+
+
+class Detect(nn.Module):
+ stride = None # strides computed during build
+ onnx_dynamic = False # ONNX export parameter
+ export = False # export mode
+
+ def __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layer
+ super().__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ self.anchor_grid = [torch.zeros(1)] * self.nl # init anchor grid
+ self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+ self.inplace = inplace # use inplace ops (e.g. slice assignment)
+
+ def forward(self, x):
+ z = [] # inference output
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
+
+ y = x[i].sigmoid()
+ if self.inplace:
+ y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
+ xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy
+ wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
+ y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
+
+ def _make_grid(self, nx=20, ny=20, i=0, torch_1_10=check_version(torch.__version__, '1.10.0')):
+ d = self.anchors[i].device
+ t = self.anchors[i].dtype
+ shape = 1, self.na, ny, nx, 2 # grid shape
+ y, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)
+ if torch_1_10: # torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibility
+ yv, xv = torch.meshgrid(y, x, indexing='ij')
+ else:
+ yv, xv = torch.meshgrid(y, x)
+ grid = torch.stack((xv, yv), 2).expand(shape) - 0.5 # add grid offset, i.e. y = 2.0 * x - 0.5
+ anchor_grid = (self.anchors[i] * self.stride[i]).view((1, self.na, 1, 1, 2)).expand(shape)
+ return grid, anchor_grid
+
+
+class IDetect(nn.Module):
+ stride = None # strides computed during build
+ onnx_dynamic = False # ONNX export parameter
+ export = False # export mode
+
+ def __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layer
+ super().__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.zeros(1)] * self.nl # init grid
+ a = torch.tensor(anchors).float().view(self.nl, -1, 2)
+ self.register_buffer('anchors', a) # shape(nl,na,2)
+ self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+ self.inplace = inplace # use in-place ops (e.g. slice assignment)
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
+
+ def forward(self, x):
+ #if not hasattr(self, 'inplace'):
+ # self.inplace = True
+ z = [] # inference output
+ for i in range(self.nl):
+ x[i] = self.im[i](self.m[i](self.ia[i](x[i]))) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
+
+ y = x[i].sigmoid()
+ #if self.inplace:
+ y[..., 0:2] = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ #else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
+ # xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
+ # xy = (xy * 2 - 0.5 + self.grid[i]) * self.stride[i] # xy
+ # wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
+ # y = torch.cat((xy, wh, conf), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ if check_version(torch.__version__, '1.10.0'):
+ yv, xv = torch.meshgrid(torch.arange(ny), torch.arange(nx), indexing='ij')
+ else:
+ yv, xv = torch.meshgrid(torch.arange(ny), torch.arange(nx))
+ return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+
+
+class BaseModel(nn.Module):
+ # YOLOv5 base model
+ def forward(self, x, profile=False, visualize=False):
+ return self._forward_once(x, profile, visualize) # single-scale inference, train
+
+ def _forward_once(self, x, profile=False, visualize=False):
+ y, dt = [], [] # outputs
+ for m in self.model:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+ if profile:
+ self._profile_one_layer(m, x, dt)
+ x = m(x) # run
+ y.append(x if m.i in self.save else None) # save output
+ if visualize:
+ feature_visualization(x, m.type, m.i, save_dir=visualize)
+ return x
+
+ def _profile_one_layer(self, m, x, dt):
+ c = m == self.model[-1] # is final layer, copy input as inplace fix
+ o = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPs
+ t = time_sync()
+ for _ in range(10):
+ m(x.copy() if c else x)
+ dt.append((time_sync() - t) * 100)
+ if m == self.model[0]:
+ LOGGER.info(f"{'time (ms)':>10s} {'GFLOPs':>10s} {'params':>10s} module")
+ LOGGER.info(f'{dt[-1]:10.2f} {o:10.2f} {m.np:10.0f} {m.type}')
+ if c:
+ LOGGER.info(f"{sum(dt):10.2f} {'-':>10s} {'-':>10s} Total")
+
+ def fuse(self): # fuse model Conv2d() + BatchNorm2d() layers
+ LOGGER.info('Fusing layers... ')
+ for m in self.model.modules():
+ if isinstance(m, (Conv, DWConv)) and hasattr(m, 'bn'):
+ m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
+ delattr(m, 'bn') # remove batchnorm
+ m.forward = m.forward_fuse # update forward
+ self.info()
+ return self
+
+ def info(self, verbose=False, img_size=640): # print model information
+ model_info(self, verbose, img_size)
+
+ def _apply(self, fn):
+ # Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers
+ self = super()._apply(fn)
+ m = self.model[-1] # Detect()
+ if isinstance(m, Detect):
+ m.stride = fn(m.stride)
+ m.grid = list(map(fn, m.grid))
+ if isinstance(m.anchor_grid, list):
+ m.anchor_grid = list(map(fn, m.anchor_grid))
+ return self
+
+
+class DetectionModel(BaseModel):
+ # YOLOv5 detection model
+ def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classes
+ super().__init__()
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg, encoding='ascii', errors='ignore') as f:
+ self.yaml = yaml.safe_load(f) # model dict
+
+ # Define model
+ ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels
+ if nc and nc != self.yaml['nc']:
+ LOGGER.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ if anchors:
+ LOGGER.info(f'Overriding model.yaml anchors with anchors={anchors}')
+ self.yaml['anchors'] = round(anchors) # override yaml value
+ self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist
+ self.names = [str(i) for i in range(self.yaml['nc'])] # default names
+ self.inplace = self.yaml.get('inplace', True)
+
+ # Build strides, anchors
+ m = self.model[-1] # Detect()
+ if isinstance(m, (Detect, IDetect)):
+ s = 256 # 2x min stride
+ m.inplace = self.inplace
+ m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m) # must be in pixel-space (not grid-space)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+
+ # Init weights, biases
+ initialize_weights(self)
+ self.info()
+ LOGGER.info('')
+
+ def forward(self, x, augment=False, profile=False, visualize=False):
+ if augment:
+ return self._forward_augment(x) # augmented inference, None
+ return self._forward_once(x, profile, visualize) # single-scale inference, train
+
+ def _forward_augment(self, x):
+ img_size = x.shape[-2:] # height, width
+ s = [1, 0.83, 0.67] # scales
+ f = [None, 3, None] # flips (2-ud, 3-lr)
+ y = [] # outputs
+ for si, fi in zip(s, f):
+ xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
+ yi = self._forward_once(xi)[0] # forward
+ # cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # save
+ yi = self._descale_pred(yi, fi, si, img_size)
+ y.append(yi)
+ y = self._clip_augmented(y) # clip augmented tails
+ return torch.cat(y, 1), None # augmented inference, train
+
+ def _descale_pred(self, p, flips, scale, img_size):
+ # de-scale predictions following augmented inference (inverse operation)
+ if self.inplace:
+ p[..., :4] /= scale # de-scale
+ if flips == 2:
+ p[..., 1] = img_size[0] - p[..., 1] # de-flip ud
+ elif flips == 3:
+ p[..., 0] = img_size[1] - p[..., 0] # de-flip lr
+ else:
+ x, y, wh = p[..., 0:1] / scale, p[..., 1:2] / scale, p[..., 2:4] / scale # de-scale
+ if flips == 2:
+ y = img_size[0] - y # de-flip ud
+ elif flips == 3:
+ x = img_size[1] - x # de-flip lr
+ p = torch.cat((x, y, wh, p[..., 4:]), -1)
+ return p
+
+ def _clip_augmented(self, y):
+ # Clip YOLOv5 augmented inference tails
+ nl = self.model[-1].nl # number of detection layers (P3-P5)
+ g = sum(4 ** x for x in range(nl)) # grid points
+ e = 1 # exclude layer count
+ i = (y[0].shape[1] // g) * sum(4 ** x for x in range(e)) # indices
+ y[0] = y[0][:, :-i] # large
+ i = (y[-1].shape[1] // g) * sum(4 ** (nl - 1 - x) for x in range(e)) # indices
+ y[-1] = y[-1][:, i:] # small
+ return y
+
+ def _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1).detach() # conv.bias(255) to (3,85)
+ b[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b[:, 5:] += math.log(0.6 / (m.nc - 0.999999)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+
+Model = DetectionModel # retain YOLOv5 'Model' class for backwards compatibility
+
+
+class ClassificationModel(BaseModel):
+ # YOLOv5 classification model
+ def __init__(self, cfg=None, model=None, nc=1000, cutoff=10): # yaml, model, number of classes, cutoff index
+ super().__init__()
+ self._from_detection_model(model, nc, cutoff) if model is not None else self._from_yaml(cfg)
+
+ def _from_detection_model(self, model, nc=1000, cutoff=10):
+ # Create a YOLOv5 classification model from a YOLOv5 detection model
+ if isinstance(model, DetectMultiBackend):
+ model = model.model # unwrap DetectMultiBackend
+ model.model = model.model[:cutoff] # backbone
+ m = model.model[-1] # last layer
+ ch = m.conv.in_channels if hasattr(m, 'conv') else m.cv1.conv.in_channels # ch into module
+ c = Classify(ch, nc) # Classify()
+ c.i, c.f, c.type = m.i, m.f, 'models.common.Classify' # index, from, type
+ model.model[-1] = c # replace
+ self.model = model.model
+ self.stride = model.stride
+ self.save = []
+ self.nc = nc
+
+ def _from_yaml(self, cfg):
+ # Create a YOLOv5 classification model from a *.yaml file
+ self.model = None
+
+
+def parse_model(d, ch): # model_dict, input_channels(3)
+ LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ with contextlib.suppress(NameError):
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+
+ n = n_ = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in (Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, MixConv2d, Focus, CrossConv,
+ BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x, SPPCSPC):
+ c1, c2 = ch[f], args[0]
+ if c2 != no: # if not output
+ c2 = make_divisible(c2 * gw, 8)
+
+ args = [c1, c2, *args[1:]]
+ if m in [BottleneckCSP, C3, C3TR, C3Ghost, C3x, SPPCSPC]:
+ args.insert(2, n) # number of repeats
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum(ch[x] for x in f)
+ elif m in {Detect, IDetect}:
+ args.append([ch[x] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ elif m is Contract:
+ c2 = ch[f] * args[0] ** 2
+ elif m is Expand:
+ c2 = ch[f] // args[0] ** 2
+ else:
+ c2 = ch[f]
+
+ m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum(x.numel() for x in m_.parameters()) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ LOGGER.info(f'{i:>3}{str(f):>18}{n_:>3}{np:10.0f} {t:<40}{str(args):<30}') # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ if i == 0:
+ ch = []
+ ch.append(c2)
+ return nn.Sequential(*layers), sorted(save)
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--cfg', type=str, default='yolov5s.yaml', help='model.yaml')
+ parser.add_argument('--batch-size', type=int, default=1, help='total batch size for all GPUs')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--profile', action='store_true', help='profile model speed')
+ parser.add_argument('--line-profile', action='store_true', help='profile model speed layer by layer')
+ parser.add_argument('--test', action='store_true', help='test all yolo*.yaml')
+ opt = parser.parse_args()
+ opt.cfg = check_yaml(opt.cfg) # check YAML
+ print_args(vars(opt))
+ device = select_device(opt.device)
+
+ # Create model
+ im = torch.rand(opt.batch_size, 3, 640, 640).to(device)
+ model = Model(opt.cfg).to(device)
+
+ # Options
+ if opt.line_profile: # profile layer by layer
+ model(im, profile=True)
+
+ elif opt.profile: # profile forward-backward
+ results = profile(input=im, ops=[model], n=3)
+
+ elif opt.test: # test all models
+ for cfg in Path(ROOT / 'models').rglob('yolo*.yaml'):
+ try:
+ _ = Model(cfg)
+ except Exception as e:
+ print(f'Error in {cfg}: {e}')
+
+ else: # report fused model summary
+ model.fuse()
diff --git a/yolov7_seg/det/models/yolov7.yaml b/yolov7_seg/det/models/yolov7.yaml
new file mode 100644
index 000000000..d3bbb4ff8
--- /dev/null
+++ b/yolov7_seg/det/models/yolov7.yaml
@@ -0,0 +1,140 @@
+# parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+
+# anchors
+anchors:
+ - [12,16, 19,36, 40,28] # P3/8
+ - [36,75, 76,55, 72,146] # P4/16
+ - [142,110, 192,243, 459,401] # P5/32
+
+# yolov7 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Conv, [64, 3, 1]],
+
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 1, Conv, [64, 1, 1]],
+ [-2, 1, Conv, [64, 1, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 11
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [128, 1, 1]],
+ [-3, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 16-P3/8
+ [-1, 1, Conv, [128, 1, 1]],
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [512, 1, 1]], # 24
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-3, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 29-P4/16
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [1024, 1, 1]], # 37
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-3, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [512, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 42-P5/32
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [1024, 1, 1]], # 50
+ ]
+
+# yolov7 head
+head:
+ [[-1, 1, SPPCSPC, [512]], # 51
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [37, 1, Conv, [256, 1, 1]], # route backbone P4
+ [[-1, -2], 1, Concat, [1]],
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 63
+
+ [-1, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [24, 1, Conv, [128, 1, 1]], # route backbone P3
+ [[-1, -2], 1, Concat, [1]],
+
+ [-1, 1, Conv, [128, 1, 1]],
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [128, 1, 1]], # 75
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [128, 1, 1]],
+ [-3, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 2]],
+ [[-1, -3, 63], 1, Concat, [1]],
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 88
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-3, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 2]],
+ [[-1, -3, 51], 1, Concat, [1]],
+
+ [-1, 1, Conv, [512, 1, 1]],
+ [-2, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [512, 1, 1]], # 101
+
+ [75, 1, Conv, [256, 3, 1]],
+ [88, 1, Conv, [512, 3, 1]],
+ [101, 1, Conv, [1024, 3, 1]],
+
+ [[102,103,104], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)
+ ]
\ No newline at end of file
diff --git a/yolov7_seg/det/requirements.txt b/yolov7_seg/det/requirements.txt
new file mode 100644
index 000000000..0f282135e
--- /dev/null
+++ b/yolov7_seg/det/requirements.txt
@@ -0,0 +1,43 @@
+# YOLOv5 requirements
+# Usage: pip install -r requirements.txt
+
+# Base ----------------------------------------
+matplotlib>=3.2.2
+numpy>=1.18.5
+opencv-python>=4.1.1
+Pillow>=7.1.2
+PyYAML>=5.3.1
+requests>=2.23.0
+scipy>=1.4.1
+torch>=1.7.0
+torchvision>=0.8.1
+tqdm>=4.64.0
+protobuf<=3.20.1 # https://github.com/ultralytics/yolov5/issues/8012
+
+# Logging -------------------------------------
+tensorboard>=2.4.1
+# wandb
+# clearml
+
+# Plotting ------------------------------------
+pandas>=1.1.4
+seaborn>=0.11.0
+
+# Export --------------------------------------
+# coremltools>=5.2 # CoreML export
+# onnx>=1.9.0 # ONNX export
+# onnx-simplifier>=0.4.1 # ONNX simplifier
+# nvidia-pyindex # TensorRT export
+# nvidia-tensorrt # TensorRT export
+# scikit-learn==0.19.2 # CoreML quantization
+# tensorflow>=2.4.1 # TFLite export (or tensorflow-cpu, tensorflow-aarch64)
+# tensorflowjs>=3.9.0 # TF.js export
+# openvino-dev # OpenVINO export
+
+# Extras --------------------------------------
+ipython # interactive notebook
+psutil # system utilization
+thop>=0.1.1 # FLOPs computation
+# albumentations>=1.0.3
+# pycocotools>=2.0 # COCO mAP
+# roboflow
diff --git a/yolov7_seg/det/setup.cfg b/yolov7_seg/det/setup.cfg
new file mode 100644
index 000000000..b6b2e1840
--- /dev/null
+++ b/yolov7_seg/det/setup.cfg
@@ -0,0 +1,59 @@
+# Project-wide configuration file, can be used for package metadata and other toll configurations
+# Example usage: global configuration for PEP8 (via flake8) setting or default pytest arguments
+# Local usage: pip install pre-commit, pre-commit run --all-files
+
+[metadata]
+license_file = LICENSE
+description_file = README.md
+
+
+[tool:pytest]
+norecursedirs =
+ .git
+ dist
+ build
+addopts =
+ --doctest-modules
+ --durations=25
+ --color=yes
+
+
+[flake8]
+max-line-length = 120
+exclude = .tox,*.egg,build,temp
+select = E,W,F
+doctests = True
+verbose = 2
+# https://pep8.readthedocs.io/en/latest/intro.html#error-codes
+format = pylint
+# see: https://www.flake8rules.com/
+ignore =
+ E731 # Do not assign a lambda expression, use a def
+ F405 # name may be undefined, or defined from star imports: module
+ E402 # module level import not at top of file
+ F401 # module imported but unused
+ W504 # line break after binary operator
+ E127 # continuation line over-indented for visual indent
+ W504 # line break after binary operator
+ E231 # missing whitespace after ‘,’, ‘;’, or ‘:’
+ E501 # line too long
+ F403 # ‘from module import *’ used; unable to detect undefined names
+
+
+[isort]
+# https://pycqa.github.io/isort/docs/configuration/options.html
+line_length = 120
+# see: https://pycqa.github.io/isort/docs/configuration/multi_line_output_modes.html
+multi_line_output = 0
+
+
+[yapf]
+based_on_style = pep8
+spaces_before_comment = 2
+COLUMN_LIMIT = 120
+COALESCE_BRACKETS = True
+SPACES_AROUND_POWER_OPERATOR = True
+SPACE_BETWEEN_ENDING_COMMA_AND_CLOSING_BRACKET = False
+SPLIT_BEFORE_CLOSING_BRACKET = False
+SPLIT_BEFORE_FIRST_ARGUMENT = False
+# EACH_DICT_ENTRY_ON_SEPARATE_LINE = False
diff --git a/yolov7_seg/det/train.py b/yolov7_seg/det/train.py
new file mode 100644
index 000000000..4cb4410b0
--- /dev/null
+++ b/yolov7_seg/det/train.py
@@ -0,0 +1,632 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Train a YOLOv5 model on a custom dataset.
+
+Models and datasets download automatically from the latest YOLOv5 release.
+Models: https://github.com/ultralytics/yolov5/tree/master/models
+Datasets: https://github.com/ultralytics/yolov5/tree/master/data
+Tutorial: https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data
+
+Usage:
+ $ python path/to/train.py --data coco128.yaml --weights yolov5s.pt --img 640 # from pretrained (RECOMMENDED)
+ $ python path/to/train.py --data coco128.yaml --weights '' --cfg yolov5s.yaml --img 640 # from scratch
+"""
+
+import argparse
+import math
+import os
+import random
+import sys
+import time
+from copy import deepcopy
+from datetime import datetime
+from pathlib import Path
+
+import numpy as np
+import torch
+import torch.distributed as dist
+import torch.nn as nn
+import yaml
+from torch.optim import lr_scheduler
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+import val # for end-of-epoch mAP
+from models.experimental import attempt_load
+from models.yolo import Model
+from utils.autoanchor import check_anchors
+from utils.autobatch import check_train_batch_size
+from utils.callbacks import Callbacks
+from utils.dataloaders import create_dataloader
+from utils.downloads import attempt_download, is_url
+from utils.general import (LOGGER, check_amp, check_dataset, check_file, check_git_status, check_img_size,
+ check_requirements, check_suffix, check_yaml, colorstr, get_latest_run, increment_path,
+ init_seeds, intersect_dicts, labels_to_class_weights, labels_to_image_weights, methods,
+ one_cycle, print_args, print_mutation, strip_optimizer, yaml_save)
+from utils.loggers import Loggers
+from utils.loggers.wandb.wandb_utils import check_wandb_resume
+from utils.loss import ComputeLoss
+from utils.metrics import fitness
+from utils.plots import plot_evolve, plot_labels
+from utils.torch_utils import (EarlyStopping, ModelEMA, de_parallel, select_device, smart_DDP, smart_optimizer,
+ smart_resume, torch_distributed_zero_first)
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+
+def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictionary
+ save_dir, epochs, batch_size, weights, single_cls, evolve, data, cfg, resume, noval, nosave, workers, freeze = \
+ Path(opt.save_dir), opt.epochs, opt.batch_size, opt.weights, opt.single_cls, opt.evolve, opt.data, opt.cfg, \
+ opt.resume, opt.noval, opt.nosave, opt.workers, opt.freeze
+ callbacks.run('on_pretrain_routine_start')
+
+ # Directories
+ w = save_dir / 'weights' # weights dir
+ (w.parent if evolve else w).mkdir(parents=True, exist_ok=True) # make dir
+ last, best = w / 'last.pt', w / 'best.pt'
+
+ # Hyperparameters
+ if isinstance(hyp, str):
+ with open(hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ LOGGER.info(colorstr('hyperparameters: ') + ', '.join(f'{k}={v}' for k, v in hyp.items()))
+ opt.hyp = hyp.copy() # for saving hyps to checkpoints
+
+ # Save run settings
+ if not evolve:
+ yaml_save(save_dir / 'hyp.yaml', hyp)
+ yaml_save(save_dir / 'opt.yaml', vars(opt))
+
+ # Loggers
+ data_dict = None
+ if RANK in {-1, 0}:
+ loggers = Loggers(save_dir, weights, opt, hyp, LOGGER) # loggers instance
+ if loggers.clearml:
+ data_dict = loggers.clearml.data_dict # None if no ClearML dataset or filled in by ClearML
+ if loggers.wandb:
+ data_dict = loggers.wandb.data_dict
+ if resume:
+ weights, epochs, hyp, batch_size = opt.weights, opt.epochs, opt.hyp, opt.batch_size
+
+ # Register actions
+ for k in methods(loggers):
+ callbacks.register_action(k, callback=getattr(loggers, k))
+
+ # Config
+ plots = not evolve and not opt.noplots # create plots
+ cuda = device.type != 'cpu'
+ init_seeds(opt.seed + 1 + RANK, deterministic=True)
+ with torch_distributed_zero_first(LOCAL_RANK):
+ data_dict = data_dict or check_dataset(data) # check if None
+ train_path, val_path = data_dict['train'], data_dict['val']
+ nc = 1 if single_cls else int(data_dict['nc']) # number of classes
+ names = ['item'] if single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
+ assert len(names) == nc, f'{len(names)} names found for nc={nc} dataset in {data}' # check
+ is_coco = isinstance(val_path, str) and val_path.endswith('coco/val2017.txt') # COCO dataset
+
+ # Model
+ check_suffix(weights, '.pt') # check weights
+ pretrained = weights.endswith('.pt')
+ if pretrained:
+ with torch_distributed_zero_first(LOCAL_RANK):
+ weights = attempt_download(weights) # download if not found locally
+ ckpt = torch.load(weights, map_location='cpu') # load checkpoint to CPU to avoid CUDA memory leak
+ model = Model(cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ exclude = ['anchor'] if (cfg or hyp.get('anchors')) and not resume else [] # exclude keys
+ csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
+ csd = intersect_dicts(csd, model.state_dict(), exclude=exclude) # intersect
+ model.load_state_dict(csd, strict=False) # load
+ LOGGER.info(f'Transferred {len(csd)}/{len(model.state_dict())} items from {weights}') # report
+ else:
+ model = Model(cfg, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ amp = check_amp(model) # check AMP
+
+ # Freeze
+ freeze = [f'model.{x}.' for x in (freeze if len(freeze) > 1 else range(freeze[0]))] # layers to freeze
+ for k, v in model.named_parameters():
+ v.requires_grad = True # train all layers
+ # v.register_hook(lambda x: torch.nan_to_num(x)) # NaN to 0 (commented for erratic training results)
+ if any(x in k for x in freeze):
+ LOGGER.info(f'freezing {k}')
+ v.requires_grad = False
+
+ # Image size
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ imgsz = check_img_size(opt.imgsz, gs, floor=gs * 2) # verify imgsz is gs-multiple
+
+ # Batch size
+ if RANK == -1 and batch_size == -1: # single-GPU only, estimate best batch size
+ batch_size = check_train_batch_size(model, imgsz, amp)
+ loggers.on_params_update({"batch_size": batch_size})
+
+ # Optimizer
+ nbs = 64 # nominal batch size
+ accumulate = max(round(nbs / batch_size), 1) # accumulate loss before optimizing
+ hyp['weight_decay'] *= batch_size * accumulate / nbs # scale weight_decay
+ optimizer = smart_optimizer(model, opt.optimizer, hyp['lr0'], hyp['momentum'], hyp['weight_decay'])
+
+ # Scheduler
+ if opt.cos_lr:
+ lf = one_cycle(1, hyp['lrf'], epochs) # cosine 1->hyp['lrf']
+ else:
+ lf = lambda x: (1 - x / epochs) * (1.0 - hyp['lrf']) + hyp['lrf'] # linear
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf) # plot_lr_scheduler(optimizer, scheduler, epochs)
+
+ # EMA
+ ema = ModelEMA(model) if RANK in {-1, 0} else None
+
+ # Resume
+ best_fitness, start_epoch = 0.0, 0
+ if pretrained:
+ if resume:
+ best_fitness, start_epoch, epochs = smart_resume(ckpt, optimizer, ema, weights, epochs, resume)
+ del ckpt, csd
+
+ # DP mode
+ if cuda and RANK == -1 and torch.cuda.device_count() > 1:
+ LOGGER.warning('WARNING: DP not recommended, use torch.distributed.run for best DDP Multi-GPU results.\n'
+ 'See Multi-GPU Tutorial at https://github.com/ultralytics/yolov5/issues/475 to get started.')
+ model = torch.nn.DataParallel(model)
+
+ # SyncBatchNorm
+ if opt.sync_bn and cuda and RANK != -1:
+ model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
+ LOGGER.info('Using SyncBatchNorm()')
+
+ # Trainloader
+ train_loader, dataset = create_dataloader(train_path,
+ imgsz,
+ batch_size // WORLD_SIZE,
+ gs,
+ single_cls,
+ hyp=hyp,
+ augment=True,
+ cache=None if opt.cache == 'val' else opt.cache,
+ rect=opt.rect,
+ rank=LOCAL_RANK,
+ workers=workers,
+ image_weights=opt.image_weights,
+ quad=opt.quad,
+ prefix=colorstr('train: '),
+ shuffle=True)
+ labels = np.concatenate(dataset.labels, 0)
+ mlc = int(labels[:, 0].max()) # max label class
+ assert mlc < nc, f'Label class {mlc} exceeds nc={nc} in {data}. Possible class labels are 0-{nc - 1}'
+
+ # Process 0
+ if RANK in {-1, 0}:
+ val_loader = create_dataloader(val_path,
+ imgsz,
+ batch_size // WORLD_SIZE * 2,
+ gs,
+ single_cls,
+ hyp=hyp,
+ cache=None if noval else opt.cache,
+ rect=True,
+ rank=-1,
+ workers=workers * 2,
+ pad=0.5,
+ prefix=colorstr('val: '))[0]
+
+ if not resume:
+ if plots:
+ plot_labels(labels, names, save_dir)
+
+ # Anchors
+ if not opt.noautoanchor:
+ check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz)
+ model.half().float() # pre-reduce anchor precision
+
+ callbacks.run('on_pretrain_routine_end')
+
+ # DDP mode
+ if cuda and RANK != -1:
+ model = smart_DDP(model)
+
+ # Model attributes
+ nl = de_parallel(model).model[-1].nl # number of detection layers (to scale hyps)
+ hyp['box'] *= 3 / nl # scale to layers
+ hyp['cls'] *= nc / 80 * 3 / nl # scale to classes and layers
+ hyp['obj'] *= (imgsz / 640) ** 2 * 3 / nl # scale to image size and layers
+ hyp['label_smoothing'] = opt.label_smoothing
+ model.nc = nc # attach number of classes to model
+ model.hyp = hyp # attach hyperparameters to model
+ model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
+ model.names = names
+
+ # Start training
+ t0 = time.time()
+ nb = len(train_loader) # number of batches
+ nw = max(round(hyp['warmup_epochs'] * nb), 100) # number of warmup iterations, max(3 epochs, 100 iterations)
+ # nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
+ last_opt_step = -1
+ maps = np.zeros(nc) # mAP per class
+ results = (0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
+ scheduler.last_epoch = start_epoch - 1 # do not move
+ scaler = torch.cuda.amp.GradScaler(enabled=amp)
+ stopper, stop = EarlyStopping(patience=opt.patience), False
+ compute_loss = ComputeLoss(model) # init loss class
+ callbacks.run('on_train_start')
+ LOGGER.info(f'Image sizes {imgsz} train, {imgsz} val\n'
+ f'Using {train_loader.num_workers * WORLD_SIZE} dataloader workers\n'
+ f"Logging results to {colorstr('bold', save_dir)}\n"
+ f'Starting training for {epochs} epochs...')
+ for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
+ callbacks.run('on_train_epoch_start')
+ model.train()
+
+ # Update image weights (optional, single-GPU only)
+ if opt.image_weights:
+ cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
+ iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
+ dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
+
+ # Update mosaic border (optional)
+ # b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
+ # dataset.mosaic_border = [b - imgsz, -b] # height, width borders
+
+ mloss = torch.zeros(3, device=device) # mean losses
+ if RANK != -1:
+ train_loader.sampler.set_epoch(epoch)
+ pbar = enumerate(train_loader)
+ LOGGER.info(('\n' + '%10s' * 7) % ('Epoch', 'gpu_mem', 'box', 'obj', 'cls', 'labels', 'img_size'))
+ if RANK in {-1, 0}:
+ pbar = tqdm(pbar, total=nb, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ optimizer.zero_grad()
+ for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
+ callbacks.run('on_train_batch_start')
+ ni = i + nb * epoch # number integrated batches (since train start)
+ imgs = imgs.to(device, non_blocking=True).float() / 255 # uint8 to float32, 0-255 to 0.0-1.0
+
+ # Warmup
+ if ni <= nw:
+ xi = [0, nw] # x interp
+ # compute_loss.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
+ accumulate = max(1, np.interp(ni, xi, [1, nbs / batch_size]).round())
+ for j, x in enumerate(optimizer.param_groups):
+ # bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
+ x['lr'] = np.interp(ni, xi, [hyp['warmup_bias_lr'] if j == 0 else 0.0, x['initial_lr'] * lf(epoch)])
+ if 'momentum' in x:
+ x['momentum'] = np.interp(ni, xi, [hyp['warmup_momentum'], hyp['momentum']])
+
+ # Multi-scale
+ if opt.multi_scale:
+ sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
+ sf = sz / max(imgs.shape[2:]) # scale factor
+ if sf != 1:
+ ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
+ imgs = nn.functional.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)
+
+ # Forward
+ with torch.cuda.amp.autocast(amp):
+ pred = model(imgs) # forward
+ loss, loss_items = compute_loss(pred, targets.to(device)) # loss scaled by batch_size
+ if RANK != -1:
+ loss *= WORLD_SIZE # gradient averaged between devices in DDP mode
+ if opt.quad:
+ loss *= 4.
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize - https://pytorch.org/docs/master/notes/amp_examples.html
+ if ni - last_opt_step >= accumulate:
+ scaler.unscale_(optimizer) # unscale gradients
+ torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=10.0) # clip gradients
+ scaler.step(optimizer) # optimizer.step
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+ last_opt_step = ni
+
+ # Log
+ if RANK in {-1, 0}:
+ mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
+ mem = f'{torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0:.3g}G' # (GB)
+ pbar.set_description(('%10s' * 2 + '%10.4g' * 5) %
+ (f'{epoch}/{epochs - 1}', mem, *mloss, targets.shape[0], imgs.shape[-1]))
+ callbacks.run('on_train_batch_end', ni, model, imgs, targets, paths, plots)
+ if callbacks.stop_training:
+ return
+ # end batch ------------------------------------------------------------------------------------------------
+
+ # Scheduler
+ lr = [x['lr'] for x in optimizer.param_groups] # for loggers
+ scheduler.step()
+
+ if RANK in {-1, 0}:
+ # mAP
+ callbacks.run('on_train_epoch_end', epoch=epoch)
+ ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'names', 'stride', 'class_weights'])
+ final_epoch = (epoch + 1 == epochs) or stopper.possible_stop
+ if not noval or final_epoch: # Calculate mAP
+ results, maps, _ = val.run(data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ half=amp,
+ model=ema.ema,
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ plots=False,
+ callbacks=callbacks,
+ compute_loss=compute_loss)
+
+ # Update best mAP
+ fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
+ stop = stopper(epoch=epoch, fitness=fi) # early stop check
+ if fi > best_fitness:
+ best_fitness = fi
+ log_vals = list(mloss) + list(results) + lr
+ callbacks.run('on_fit_epoch_end', log_vals, epoch, best_fitness, fi)
+
+ # Save model
+ if (not nosave) or (final_epoch and not evolve): # if save
+ ckpt = {
+ 'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'model': deepcopy(de_parallel(model)).half(),
+ 'ema': deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': optimizer.state_dict(),
+ 'wandb_id': loggers.wandb.wandb_run.id if loggers.wandb else None,
+ 'opt': vars(opt),
+ 'date': datetime.now().isoformat()}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fi:
+ torch.save(ckpt, best)
+ if opt.save_period > 0 and epoch % opt.save_period == 0:
+ torch.save(ckpt, w / f'epoch{epoch}.pt')
+ del ckpt
+ callbacks.run('on_model_save', last, epoch, final_epoch, best_fitness, fi)
+
+ # EarlyStopping
+ if RANK != -1: # if DDP training
+ broadcast_list = [stop if RANK == 0 else None]
+ dist.broadcast_object_list(broadcast_list, 0) # broadcast 'stop' to all ranks
+ if RANK != 0:
+ stop = broadcast_list[0]
+ if stop:
+ break # must break all DDP ranks
+
+ # end epoch ----------------------------------------------------------------------------------------------------
+ # end training -----------------------------------------------------------------------------------------------------
+ if RANK in {-1, 0}:
+ LOGGER.info(f'\n{epoch - start_epoch + 1} epochs completed in {(time.time() - t0) / 3600:.3f} hours.')
+ for f in last, best:
+ if f.exists():
+ strip_optimizer(f) # strip optimizers
+ if f is best:
+ LOGGER.info(f'\nValidating {f}...')
+ results, _, _ = val.run(
+ data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ model=attempt_load(f, device).half(),
+ iou_thres=0.65 if is_coco else 0.60, # best pycocotools results at 0.65
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ save_json=is_coco,
+ verbose=True,
+ plots=plots,
+ callbacks=callbacks,
+ compute_loss=compute_loss) # val best model with plots
+ if is_coco:
+ callbacks.run('on_fit_epoch_end', list(mloss) + list(results) + lr, epoch, best_fitness, fi)
+
+ callbacks.run('on_train_end', last, best, plots, epoch, results)
+
+ torch.cuda.empty_cache()
+ return results
+
+
+def parse_opt(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch-low.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300)
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--noval', action='store_true', help='only validate final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable AutoAnchor')
+ parser.add_argument('--noplots', action='store_true', help='save no plot files')
+ parser.add_argument('--evolve', type=int, nargs='?', const=300, help='evolve hyperparameters for x generations')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--optimizer', type=str, choices=['SGD', 'Adam', 'AdamW'], default='SGD', help='optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default=ROOT / 'runs/train', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--cos-lr', action='store_true', help='cosine LR scheduler')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--patience', type=int, default=100, help='EarlyStopping patience (epochs without improvement)')
+ parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone=10, first3=0 1 2')
+ parser.add_argument('--save-period', type=int, default=-1, help='Save checkpoint every x epochs (disabled if < 1)')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+
+ # Weights & Biases arguments
+ parser.add_argument('--entity', default=None, help='W&B: Entity')
+ parser.add_argument('--upload_dataset', nargs='?', const=True, default=False, help='W&B: Upload data, "val" option')
+ parser.add_argument('--bbox_interval', type=int, default=-1, help='W&B: Set bounding-box image logging interval')
+ parser.add_argument('--artifact_alias', type=str, default='latest', help='W&B: Version of dataset artifact to use')
+
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def main(opt, callbacks=Callbacks()):
+ # Checks
+ if RANK in {-1, 0}:
+ print_args(vars(opt))
+ #check_git_status()
+ #check_requirements()
+
+ # Resume
+ if opt.resume and not (check_wandb_resume(opt) or opt.evolve): # resume from specified or most recent last.pt
+ last = Path(check_file(opt.resume) if isinstance(opt.resume, str) else get_latest_run())
+ opt_yaml = last.parent.parent / 'opt.yaml' # train options yaml
+ opt_data = opt.data # original dataset
+ if opt_yaml.is_file():
+ with open(opt_yaml, errors='ignore') as f:
+ d = yaml.safe_load(f)
+ else:
+ d = torch.load(last, map_location='cpu')['opt']
+ opt = argparse.Namespace(**d) # replace
+ opt.cfg, opt.weights, opt.resume = '', str(last), True # reinstate
+ if is_url(opt_data):
+ opt.data = check_file(opt_data) # avoid HUB resume auth timeout
+ else:
+ opt.data, opt.cfg, opt.hyp, opt.weights, opt.project = \
+ check_file(opt.data), check_yaml(opt.cfg), check_yaml(opt.hyp), str(opt.weights), str(opt.project) # checks
+ assert len(opt.cfg) or len(opt.weights), 'either --cfg or --weights must be specified'
+ if opt.evolve:
+ if opt.project == str(ROOT / 'runs/train'): # if default project name, rename to runs/evolve
+ opt.project = str(ROOT / 'runs/evolve')
+ opt.exist_ok, opt.resume = opt.resume, False # pass resume to exist_ok and disable resume
+ if opt.name == 'cfg':
+ opt.name = Path(opt.cfg).stem # use model.yaml as name
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok))
+
+ # DDP mode
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if LOCAL_RANK != -1:
+ msg = 'is not compatible with YOLOv5 Multi-GPU DDP training'
+ assert not opt.image_weights, f'--image-weights {msg}'
+ assert not opt.evolve, f'--evolve {msg}'
+ assert opt.batch_size != -1, f'AutoBatch with --batch-size -1 {msg}, please pass a valid --batch-size'
+ assert opt.batch_size % WORLD_SIZE == 0, f'--batch-size {opt.batch_size} must be multiple of WORLD_SIZE'
+ assert torch.cuda.device_count() > LOCAL_RANK, 'insufficient CUDA devices for DDP command'
+ torch.cuda.set_device(LOCAL_RANK)
+ device = torch.device('cuda', LOCAL_RANK)
+ dist.init_process_group(backend="nccl" if dist.is_nccl_available() else "gloo")
+
+ # Train
+ if not opt.evolve:
+ train(opt.hyp, opt, device, callbacks)
+
+ # Evolve hyperparameters (optional)
+ else:
+ # Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)
+ meta = {
+ 'lr0': (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
+ 'lrf': (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
+ 'momentum': (0.3, 0.6, 0.98), # SGD momentum/Adam beta1
+ 'weight_decay': (1, 0.0, 0.001), # optimizer weight decay
+ 'warmup_epochs': (1, 0.0, 5.0), # warmup epochs (fractions ok)
+ 'warmup_momentum': (1, 0.0, 0.95), # warmup initial momentum
+ 'warmup_bias_lr': (1, 0.0, 0.2), # warmup initial bias lr
+ 'box': (1, 0.02, 0.2), # box loss gain
+ 'cls': (1, 0.2, 4.0), # cls loss gain
+ 'cls_pw': (1, 0.5, 2.0), # cls BCELoss positive_weight
+ 'obj': (1, 0.2, 4.0), # obj loss gain (scale with pixels)
+ 'obj_pw': (1, 0.5, 2.0), # obj BCELoss positive_weight
+ 'iou_t': (0, 0.1, 0.7), # IoU training threshold
+ 'anchor_t': (1, 2.0, 8.0), # anchor-multiple threshold
+ 'anchors': (2, 2.0, 10.0), # anchors per output grid (0 to ignore)
+ 'fl_gamma': (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
+ 'hsv_h': (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
+ 'hsv_s': (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
+ 'hsv_v': (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)
+ 'degrees': (1, 0.0, 45.0), # image rotation (+/- deg)
+ 'translate': (1, 0.0, 0.9), # image translation (+/- fraction)
+ 'scale': (1, 0.0, 0.9), # image scale (+/- gain)
+ 'shear': (1, 0.0, 10.0), # image shear (+/- deg)
+ 'perspective': (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
+ 'flipud': (1, 0.0, 1.0), # image flip up-down (probability)
+ 'fliplr': (0, 0.0, 1.0), # image flip left-right (probability)
+ 'mosaic': (1, 0.0, 1.0), # image mixup (probability)
+ 'mixup': (1, 0.0, 1.0), # image mixup (probability)
+ 'copy_paste': (1, 0.0, 1.0)} # segment copy-paste (probability)
+
+ with open(opt.hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ if 'anchors' not in hyp: # anchors commented in hyp.yaml
+ hyp['anchors'] = 3
+ if opt.noautoanchor:
+ del hyp['anchors'], meta['anchors']
+ opt.noval, opt.nosave, save_dir = True, True, Path(opt.save_dir) # only val/save final epoch
+ # ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
+ evolve_yaml, evolve_csv = save_dir / 'hyp_evolve.yaml', save_dir / 'evolve.csv'
+ if opt.bucket:
+ os.system(f'gsutil cp gs://{opt.bucket}/evolve.csv {evolve_csv}') # download evolve.csv if exists
+
+ for _ in range(opt.evolve): # generations to evolve
+ if evolve_csv.exists(): # if evolve.csv exists: select best hyps and mutate
+ # Select parent(s)
+ parent = 'single' # parent selection method: 'single' or 'weighted'
+ x = np.loadtxt(evolve_csv, ndmin=2, delimiter=',', skiprows=1)
+ n = min(5, len(x)) # number of previous results to consider
+ x = x[np.argsort(-fitness(x))][:n] # top n mutations
+ w = fitness(x) - fitness(x).min() + 1E-6 # weights (sum > 0)
+ if parent == 'single' or len(x) == 1:
+ # x = x[random.randint(0, n - 1)] # random selection
+ x = x[random.choices(range(n), weights=w)[0]] # weighted selection
+ elif parent == 'weighted':
+ x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
+
+ # Mutate
+ mp, s = 0.8, 0.2 # mutation probability, sigma
+ npr = np.random
+ npr.seed(int(time.time()))
+ g = np.array([meta[k][0] for k in hyp.keys()]) # gains 0-1
+ ng = len(meta)
+ v = np.ones(ng)
+ while all(v == 1): # mutate until a change occurs (prevent duplicates)
+ v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
+ for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
+ hyp[k] = float(x[i + 7] * v[i]) # mutate
+
+ # Constrain to limits
+ for k, v in meta.items():
+ hyp[k] = max(hyp[k], v[1]) # lower limit
+ hyp[k] = min(hyp[k], v[2]) # upper limit
+ hyp[k] = round(hyp[k], 5) # significant digits
+
+ # Train mutation
+ results = train(hyp.copy(), opt, device, callbacks)
+ callbacks = Callbacks()
+ # Write mutation results
+ print_mutation(results, hyp.copy(), save_dir, opt.bucket)
+
+ # Plot results
+ plot_evolve(evolve_csv)
+ LOGGER.info(f'Hyperparameter evolution finished {opt.evolve} generations\n'
+ f"Results saved to {colorstr('bold', save_dir)}\n"
+ f'Usage example: $ python train.py --hyp {evolve_yaml}')
+
+
+def run(**kwargs):
+ # Usage: import train; train.run(data='coco128.yaml', imgsz=320, weights='yolov5m.pt')
+ opt = parse_opt(True)
+ for k, v in kwargs.items():
+ setattr(opt, k, v)
+ main(opt)
+ return opt
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/det/utils/__init__.py b/yolov7_seg/det/utils/__init__.py
new file mode 100644
index 000000000..a63c473a4
--- /dev/null
+++ b/yolov7_seg/det/utils/__init__.py
@@ -0,0 +1,36 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+utils/initialization
+"""
+
+
+def notebook_init(verbose=True):
+ # Check system software and hardware
+ print('Checking setup...')
+
+ import os
+ import shutil
+
+ from utils.general import check_requirements, emojis, is_colab
+ from utils.torch_utils import select_device # imports
+
+ check_requirements(('psutil', 'IPython'))
+ import psutil
+ from IPython import display # to display images and clear console output
+
+ if is_colab():
+ shutil.rmtree('/content/sample_data', ignore_errors=True) # remove colab /sample_data directory
+
+ # System info
+ if verbose:
+ gb = 1 << 30 # bytes to GiB (1024 ** 3)
+ ram = psutil.virtual_memory().total
+ total, used, free = shutil.disk_usage("/")
+ display.clear_output()
+ s = f'({os.cpu_count()} CPUs, {ram / gb:.1f} GB RAM, {(total - free) / gb:.1f}/{total / gb:.1f} GB disk)'
+ else:
+ s = ''
+
+ select_device(newline=False)
+ print(emojis(f'Setup complete ✅ {s}'))
+ return display
diff --git a/yolov7_seg/det/utils/activations.py b/yolov7_seg/det/utils/activations.py
new file mode 100644
index 000000000..03d394e11
--- /dev/null
+++ b/yolov7_seg/det/utils/activations.py
@@ -0,0 +1,103 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Activation functions
+"""
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+
+class SiLU(nn.Module):
+ # SiLU activation https://arxiv.org/pdf/1606.08415.pdf
+ @staticmethod
+ def forward(x):
+ return x * torch.sigmoid(x)
+
+
+class Hardswish(nn.Module):
+ # Hard-SiLU activation
+ @staticmethod
+ def forward(x):
+ # return x * F.hardsigmoid(x) # for TorchScript and CoreML
+ return x * F.hardtanh(x + 3, 0.0, 6.0) / 6.0 # for TorchScript, CoreML and ONNX
+
+
+class Mish(nn.Module):
+ # Mish activation https://github.com/digantamisra98/Mish
+ @staticmethod
+ def forward(x):
+ return x * F.softplus(x).tanh()
+
+
+class MemoryEfficientMish(nn.Module):
+ # Mish activation memory-efficient
+ class F(torch.autograd.Function):
+
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ fx = F.softplus(x).tanh()
+ return grad_output * (fx + x * sx * (1 - fx * fx))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+class FReLU(nn.Module):
+ # FReLU activation https://arxiv.org/abs/2007.11824
+ def __init__(self, c1, k=3): # ch_in, kernel
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
+ self.bn = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ return torch.max(x, self.bn(self.conv(x)))
+
+
+class AconC(nn.Module):
+ r""" ACON activation (activate or not)
+ AconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is a learnable parameter
+ according to "Activate or Not: Learning Customized Activation" .
+ """
+
+ def __init__(self, c1):
+ super().__init__()
+ self.p1 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.p2 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.beta = nn.Parameter(torch.ones(1, c1, 1, 1))
+
+ def forward(self, x):
+ dpx = (self.p1 - self.p2) * x
+ return dpx * torch.sigmoid(self.beta * dpx) + self.p2 * x
+
+
+class MetaAconC(nn.Module):
+ r""" ACON activation (activate or not)
+ MetaAconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is generated by a small network
+ according to "Activate or Not: Learning Customized Activation" .
+ """
+
+ def __init__(self, c1, k=1, s=1, r=16): # ch_in, kernel, stride, r
+ super().__init__()
+ c2 = max(r, c1 // r)
+ self.p1 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.p2 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.fc1 = nn.Conv2d(c1, c2, k, s, bias=True)
+ self.fc2 = nn.Conv2d(c2, c1, k, s, bias=True)
+ # self.bn1 = nn.BatchNorm2d(c2)
+ # self.bn2 = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ y = x.mean(dim=2, keepdims=True).mean(dim=3, keepdims=True)
+ # batch-size 1 bug/instabilities https://github.com/ultralytics/yolov5/issues/2891
+ # beta = torch.sigmoid(self.bn2(self.fc2(self.bn1(self.fc1(y))))) # bug/unstable
+ beta = torch.sigmoid(self.fc2(self.fc1(y))) # bug patch BN layers removed
+ dpx = (self.p1 - self.p2) * x
+ return dpx * torch.sigmoid(beta * dpx) + self.p2 * x
diff --git a/yolov7_seg/det/utils/augmentations.py b/yolov7_seg/det/utils/augmentations.py
new file mode 100644
index 000000000..082ad62f6
--- /dev/null
+++ b/yolov7_seg/det/utils/augmentations.py
@@ -0,0 +1,347 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Image augmentation functions
+"""
+
+import math
+import random
+
+import cv2
+import numpy as np
+import torchvision.transforms as T
+import torchvision.transforms.functional as TF
+
+from utils.general import LOGGER, check_version, colorstr, resample_segments, segment2box
+from utils.metrics import bbox_ioa
+
+IMAGENET_MEAN = 0.485, 0.456, 0.406 # RGB mean
+IMAGENET_STD = 0.229, 0.224, 0.225 # RGB standard deviation
+
+
+class Albumentations:
+ # YOLOv5 Albumentations class (optional, only used if package is installed)
+ def __init__(self):
+ self.transform = None
+ prefix = colorstr('albumentations: ')
+ try:
+ import albumentations as A
+ check_version(A.__version__, '1.0.3', hard=True) # version requirement
+
+ T = [
+ A.Blur(p=0.01),
+ A.MedianBlur(p=0.01),
+ A.ToGray(p=0.01),
+ A.CLAHE(p=0.01),
+ A.RandomBrightnessContrast(p=0.0),
+ A.RandomGamma(p=0.0),
+ A.ImageCompression(quality_lower=75, p=0.0)] # transforms
+ self.transform = A.Compose(T, bbox_params=A.BboxParams(format='yolo', label_fields=['class_labels']))
+
+ LOGGER.info(prefix + ', '.join(f'{x}'.replace('always_apply=False, ', '') for x in T if x.p))
+ except ImportError: # package not installed, skip
+ pass
+ except Exception as e:
+ LOGGER.info(f'{prefix}{e}')
+
+ def __call__(self, im, labels, p=1.0):
+ if self.transform and random.random() < p:
+ new = self.transform(image=im, bboxes=labels[:, 1:], class_labels=labels[:, 0]) # transformed
+ im, labels = new['image'], np.array([[c, *b] for c, b in zip(new['class_labels'], new['bboxes'])])
+ return im, labels
+
+
+def normalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD, inplace=False):
+ # Denormalize RGB images x per ImageNet stats in BCHW format, i.e. = (x - mean) / std
+ return TF.normalize(x, mean, std, inplace=inplace)
+
+
+def denormalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD):
+ # Denormalize RGB images x per ImageNet stats in BCHW format, i.e. = x * std + mean
+ for i in range(3):
+ x[:, i] = x[:, i] * std[i] + mean[i]
+ return x
+
+
+def augment_hsv(im, hgain=0.5, sgain=0.5, vgain=0.5):
+ # HSV color-space augmentation
+ if hgain or sgain or vgain:
+ r = np.random.uniform(-1, 1, 3) * [hgain, sgain, vgain] + 1 # random gains
+ hue, sat, val = cv2.split(cv2.cvtColor(im, cv2.COLOR_BGR2HSV))
+ dtype = im.dtype # uint8
+
+ x = np.arange(0, 256, dtype=r.dtype)
+ lut_hue = ((x * r[0]) % 180).astype(dtype)
+ lut_sat = np.clip(x * r[1], 0, 255).astype(dtype)
+ lut_val = np.clip(x * r[2], 0, 255).astype(dtype)
+
+ im_hsv = cv2.merge((cv2.LUT(hue, lut_hue), cv2.LUT(sat, lut_sat), cv2.LUT(val, lut_val)))
+ cv2.cvtColor(im_hsv, cv2.COLOR_HSV2BGR, dst=im) # no return needed
+
+
+def hist_equalize(im, clahe=True, bgr=False):
+ # Equalize histogram on BGR image 'im' with im.shape(n,m,3) and range 0-255
+ yuv = cv2.cvtColor(im, cv2.COLOR_BGR2YUV if bgr else cv2.COLOR_RGB2YUV)
+ if clahe:
+ c = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
+ yuv[:, :, 0] = c.apply(yuv[:, :, 0])
+ else:
+ yuv[:, :, 0] = cv2.equalizeHist(yuv[:, :, 0]) # equalize Y channel histogram
+ return cv2.cvtColor(yuv, cv2.COLOR_YUV2BGR if bgr else cv2.COLOR_YUV2RGB) # convert YUV image to RGB
+
+
+def replicate(im, labels):
+ # Replicate labels
+ h, w = im.shape[:2]
+ boxes = labels[:, 1:].astype(int)
+ x1, y1, x2, y2 = boxes.T
+ s = ((x2 - x1) + (y2 - y1)) / 2 # side length (pixels)
+ for i in s.argsort()[:round(s.size * 0.5)]: # smallest indices
+ x1b, y1b, x2b, y2b = boxes[i]
+ bh, bw = y2b - y1b, x2b - x1b
+ yc, xc = int(random.uniform(0, h - bh)), int(random.uniform(0, w - bw)) # offset x, y
+ x1a, y1a, x2a, y2a = [xc, yc, xc + bw, yc + bh]
+ im[y1a:y2a, x1a:x2a] = im[y1b:y2b, x1b:x2b] # im4[ymin:ymax, xmin:xmax]
+ labels = np.append(labels, [[labels[i, 0], x1a, y1a, x2a, y2a]], axis=0)
+
+ return im, labels
+
+
+def letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
+ # Resize and pad image while meeting stride-multiple constraints
+ shape = im.shape[:2] # current shape [height, width]
+ if isinstance(new_shape, int):
+ new_shape = (new_shape, new_shape)
+
+ # Scale ratio (new / old)
+ r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
+ if not scaleup: # only scale down, do not scale up (for better val mAP)
+ r = min(r, 1.0)
+
+ # Compute padding
+ ratio = r, r # width, height ratios
+ new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
+ dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
+ if auto: # minimum rectangle
+ dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
+ elif scaleFill: # stretch
+ dw, dh = 0.0, 0.0
+ new_unpad = (new_shape[1], new_shape[0])
+ ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
+
+ dw /= 2 # divide padding into 2 sides
+ dh /= 2
+
+ if shape[::-1] != new_unpad: # resize
+ im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
+ top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
+ left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
+ im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
+ return im, ratio, (dw, dh)
+
+
+def random_perspective(im,
+ targets=(),
+ segments=(),
+ degrees=10,
+ translate=.1,
+ scale=.1,
+ shear=10,
+ perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(0.1, 0.1), scale=(0.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = im.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = im.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
+ T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(im[:, :, ::-1]) # base
+ # ax[1].imshow(im2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ if n:
+ use_segments = any(x.any() for x in segments)
+ new = np.zeros((n, 4))
+ if use_segments: # warp segments
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+
+ else: # warp boxes
+ xy = np.ones((n * 4, 3))
+ xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
+
+ # create new boxes
+ x = xy[:, [0, 2, 4, 6]]
+ y = xy[:, [1, 3, 5, 7]]
+ new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
+
+ # clip
+ new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
+ new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+
+ return im, targets
+
+
+def copy_paste(im, labels, segments, p=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ if p and n:
+ h, w, c = im.shape # height, width, channels
+ im_new = np.zeros(im.shape, np.uint8)
+ for j in random.sample(range(n), k=round(p * n)):
+ l, s = labels[j], segments[j]
+ box = w - l[3], l[2], w - l[1], l[4]
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
+ labels = np.concatenate((labels, [[l[0], *box]]), 0)
+ segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=im, src2=im_new)
+ result = cv2.flip(result, 1) # augment segments (flip left-right)
+ i = result > 0 # pixels to replace
+ # i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
+ im[i] = result[i] # cv2.imwrite('debug.jpg', im) # debug
+
+ return im, labels, segments
+
+
+def cutout(im, labels, p=0.5):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ if random.random() < p:
+ h, w = im.shape[:2]
+ scales = [0.5] * 1 + [0.25] * 2 + [0.125] * 4 + [0.0625] * 8 + [0.03125] * 16 # image size fraction
+ for s in scales:
+ mask_h = random.randint(1, int(h * s)) # create random masks
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ # apply random color mask
+ im[ymin:ymax, xmin:xmax] = [random.randint(64, 191) for _ in range(3)]
+
+ # return unobscured labels
+ if len(labels) and s > 0.03:
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ labels = labels[ioa < 0.60] # remove >60% obscured labels
+
+ return labels
+
+
+def mixup(im, labels, im2, labels2):
+ # Applies MixUp augmentation https://arxiv.org/pdf/1710.09412.pdf
+ r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
+ im = (im * r + im2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+ return im, labels
+
+
+def box_candidates(box1, box2, wh_thr=2, ar_thr=100, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
+ # Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
+ w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
+ w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
+ ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
+ return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
+
+
+def classify_albumentations(augment=True,
+ size=224,
+ scale=(0.08, 1.0),
+ hflip=0.5,
+ vflip=0.0,
+ jitter=0.4,
+ mean=IMAGENET_MEAN,
+ std=IMAGENET_STD,
+ auto_aug=False):
+ # YOLOv5 classification Albumentations (optional, only used if package is installed)
+ prefix = colorstr('albumentations: ')
+ try:
+ import albumentations as A
+ from albumentations.pytorch import ToTensorV2
+ check_version(A.__version__, '1.0.3', hard=True) # version requirement
+ if augment: # Resize and crop
+ T = [A.RandomResizedCrop(height=size, width=size, scale=scale)]
+ if auto_aug:
+ # TODO: implement AugMix, AutoAug & RandAug in albumentation
+ LOGGER.info(f'{prefix}auto augmentations are currently not supported')
+ else:
+ if hflip > 0:
+ T += [A.HorizontalFlip(p=hflip)]
+ if vflip > 0:
+ T += [A.VerticalFlip(p=vflip)]
+ if jitter > 0:
+ color_jitter = (float(jitter),) * 3 # repeat value for brightness, contrast, satuaration, 0 hue
+ T += [A.ColorJitter(*color_jitter, 0)]
+ else: # Use fixed crop for eval set (reproducibility)
+ T = [A.SmallestMaxSize(max_size=size), A.CenterCrop(height=size, width=size)]
+ T += [A.Normalize(mean=mean, std=std), ToTensorV2()] # Normalize and convert to Tensor
+ LOGGER.info(prefix + ', '.join(f'{x}'.replace('always_apply=False, ', '') for x in T if x.p))
+ return A.Compose(T)
+
+ except ImportError: # package not installed, skip
+ pass
+ except Exception as e:
+ LOGGER.info(f'{prefix}{e}')
+
+
+def classify_transforms(size=224):
+ # Transforms to apply if albumentations not installed
+ return T.Compose([T.ToTensor(), T.Resize(size), T.CenterCrop(size), T.Normalize(IMAGENET_MEAN, IMAGENET_STD)])
diff --git a/yolov7_seg/det/utils/autoanchor.py b/yolov7_seg/det/utils/autoanchor.py
new file mode 100644
index 000000000..9a2ab2940
--- /dev/null
+++ b/yolov7_seg/det/utils/autoanchor.py
@@ -0,0 +1,170 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+AutoAnchor utils
+"""
+
+import random
+
+import numpy as np
+import torch
+import yaml
+from tqdm import tqdm
+
+from utils.general import LOGGER, colorstr
+
+PREFIX = colorstr('AutoAnchor: ')
+
+
+def check_anchor_order(m):
+ # Check anchor order against stride order for YOLOv5 Detect() module m, and correct if necessary
+ a = m.anchors.prod(-1).mean(-1).view(-1) # mean anchor area per output layer
+ da = a[-1] - a[0] # delta a
+ ds = m.stride[-1] - m.stride[0] # delta s
+ if da and (da.sign() != ds.sign()): # same order
+ LOGGER.info(f'{PREFIX}Reversing anchor order')
+ m.anchors[:] = m.anchors.flip(0)
+
+
+def check_anchors(dataset, model, thr=4.0, imgsz=640):
+ # Check anchor fit to data, recompute if necessary
+ m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
+ shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
+ wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
+
+ def metric(k): # compute metric
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1 / r).min(2)[0] # ratio metric
+ best = x.max(1)[0] # best_x
+ aat = (x > 1 / thr).float().sum(1).mean() # anchors above threshold
+ bpr = (best > 1 / thr).float().mean() # best possible recall
+ return bpr, aat
+
+ stride = m.stride.to(m.anchors.device).view(-1, 1, 1) # model strides
+ anchors = m.anchors.clone() * stride # current anchors
+ bpr, aat = metric(anchors.cpu().view(-1, 2))
+ s = f'\n{PREFIX}{aat:.2f} anchors/target, {bpr:.3f} Best Possible Recall (BPR). '
+ if bpr > 0.98: # threshold to recompute
+ LOGGER.info(f'{s}Current anchors are a good fit to dataset ✅')
+ else:
+ LOGGER.info(f'{s}Anchors are a poor fit to dataset ⚠️, attempting to improve...')
+ na = m.anchors.numel() // 2 # number of anchors
+ try:
+ anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
+ except Exception as e:
+ LOGGER.info(f'{PREFIX}ERROR: {e}')
+ new_bpr = metric(anchors)[0]
+ if new_bpr > bpr: # replace anchors
+ anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
+ m.anchors[:] = anchors.clone().view_as(m.anchors)
+ check_anchor_order(m) # must be in pixel-space (not grid-space)
+ m.anchors /= stride
+ s = f'{PREFIX}Done ✅ (optional: update model *.yaml to use these anchors in the future)'
+ else:
+ s = f'{PREFIX}Done ⚠️ (original anchors better than new anchors, proceeding with original anchors)'
+ LOGGER.info(s)
+
+
+def kmean_anchors(dataset='./data/coco128.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
+ """ Creates kmeans-evolved anchors from training dataset
+
+ Arguments:
+ dataset: path to data.yaml, or a loaded dataset
+ n: number of anchors
+ img_size: image size used for training
+ thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
+ gen: generations to evolve anchors using genetic algorithm
+ verbose: print all results
+
+ Return:
+ k: kmeans evolved anchors
+
+ Usage:
+ from utils.autoanchor import *; _ = kmean_anchors()
+ """
+ from scipy.cluster.vq import kmeans
+
+ npr = np.random
+ thr = 1 / thr
+
+ def metric(k, wh): # compute metrics
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1 / r).min(2)[0] # ratio metric
+ # x = wh_iou(wh, torch.tensor(k)) # iou metric
+ return x, x.max(1)[0] # x, best_x
+
+ def anchor_fitness(k): # mutation fitness
+ _, best = metric(torch.tensor(k, dtype=torch.float32), wh)
+ return (best * (best > thr).float()).mean() # fitness
+
+ def print_results(k, verbose=True):
+ k = k[np.argsort(k.prod(1))] # sort small to large
+ x, best = metric(k, wh0)
+ bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
+ s = f'{PREFIX}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr\n' \
+ f'{PREFIX}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, ' \
+ f'past_thr={x[x > thr].mean():.3f}-mean: '
+ for x in k:
+ s += '%i,%i, ' % (round(x[0]), round(x[1]))
+ if verbose:
+ LOGGER.info(s[:-2])
+ return k
+
+ if isinstance(dataset, str): # *.yaml file
+ with open(dataset, errors='ignore') as f:
+ data_dict = yaml.safe_load(f) # model dict
+ from utils.dataloaders import LoadImagesAndLabels
+ dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
+
+ # Get label wh
+ shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
+
+ # Filter
+ i = (wh0 < 3.0).any(1).sum()
+ if i:
+ LOGGER.info(f'{PREFIX}WARNING: Extremely small objects found: {i} of {len(wh0)} labels are < 3 pixels in size')
+ wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ # wh = wh * (npr.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
+
+ # Kmeans init
+ try:
+ LOGGER.info(f'{PREFIX}Running kmeans for {n} anchors on {len(wh)} points...')
+ assert n <= len(wh) # apply overdetermined constraint
+ s = wh.std(0) # sigmas for whitening
+ k = kmeans(wh / s, n, iter=30)[0] * s # points
+ assert n == len(k) # kmeans may return fewer points than requested if wh is insufficient or too similar
+ except Exception:
+ LOGGER.warning(f'{PREFIX}WARNING: switching strategies from kmeans to random init')
+ k = np.sort(npr.rand(n * 2)).reshape(n, 2) * img_size # random init
+ wh, wh0 = (torch.tensor(x, dtype=torch.float32) for x in (wh, wh0))
+ k = print_results(k, verbose=False)
+
+ # Plot
+ # k, d = [None] * 20, [None] * 20
+ # for i in tqdm(range(1, 21)):
+ # k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
+ # ax = ax.ravel()
+ # ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
+ # ax[0].hist(wh[wh[:, 0]<100, 0],400)
+ # ax[1].hist(wh[wh[:, 1]<100, 1],400)
+ # fig.savefig('wh.png', dpi=200)
+
+ # Evolve
+ f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
+ pbar = tqdm(range(gen), bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ for _ in pbar:
+ v = np.ones(sh)
+ while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
+ v = ((npr.random(sh) < mp) * random.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
+ kg = (k.copy() * v).clip(min=2.0)
+ fg = anchor_fitness(kg)
+ if fg > f:
+ f, k = fg, kg.copy()
+ pbar.desc = f'{PREFIX}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
+ if verbose:
+ print_results(k, verbose)
+
+ return print_results(k)
diff --git a/yolov7_seg/det/utils/autobatch.py b/yolov7_seg/det/utils/autobatch.py
new file mode 100644
index 000000000..a6485814d
--- /dev/null
+++ b/yolov7_seg/det/utils/autobatch.py
@@ -0,0 +1,66 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Auto-batch utils
+"""
+
+from copy import deepcopy
+
+import numpy as np
+import torch
+
+from utils.general import LOGGER, colorstr
+from utils.torch_utils import profile
+
+
+def check_train_batch_size(model, imgsz=640, amp=True):
+ # Check YOLOv5 training batch size
+ with torch.cuda.amp.autocast(amp):
+ return autobatch(deepcopy(model).train(), imgsz) # compute optimal batch size
+
+
+def autobatch(model, imgsz=640, fraction=0.9, batch_size=16):
+ # Automatically estimate best batch size to use `fraction` of available CUDA memory
+ # Usage:
+ # import torch
+ # from utils.autobatch import autobatch
+ # model = torch.hub.load('ultralytics/yolov5', 'yolov5s', autoshape=False)
+ # print(autobatch(model))
+
+ # Check device
+ prefix = colorstr('AutoBatch: ')
+ LOGGER.info(f'{prefix}Computing optimal batch size for --imgsz {imgsz}')
+ device = next(model.parameters()).device # get model device
+ if device.type == 'cpu':
+ LOGGER.info(f'{prefix}CUDA not detected, using default CPU batch-size {batch_size}')
+ return batch_size
+
+ # Inspect CUDA memory
+ gb = 1 << 30 # bytes to GiB (1024 ** 3)
+ d = str(device).upper() # 'CUDA:0'
+ properties = torch.cuda.get_device_properties(device) # device properties
+ t = properties.total_memory / gb # GiB total
+ r = torch.cuda.memory_reserved(device) / gb # GiB reserved
+ a = torch.cuda.memory_allocated(device) / gb # GiB allocated
+ f = t - (r + a) # GiB free
+ LOGGER.info(f'{prefix}{d} ({properties.name}) {t:.2f}G total, {r:.2f}G reserved, {a:.2f}G allocated, {f:.2f}G free')
+
+ # Profile batch sizes
+ batch_sizes = [1, 2, 4, 8, 16]
+ try:
+ img = [torch.zeros(b, 3, imgsz, imgsz) for b in batch_sizes]
+ results = profile(img, model, n=3, device=device)
+ except Exception as e:
+ LOGGER.warning(f'{prefix}{e}')
+
+ # Fit a solution
+ y = [x[2] for x in results if x] # memory [2]
+ p = np.polyfit(batch_sizes[:len(y)], y, deg=1) # first degree polynomial fit
+ b = int((f * fraction - p[1]) / p[0]) # y intercept (optimal batch size)
+ if None in results: # some sizes failed
+ i = results.index(None) # first fail index
+ if b >= batch_sizes[i]: # y intercept above failure point
+ b = batch_sizes[max(i - 1, 0)] # select prior safe point
+
+ fraction = np.polyval(p, b) / t # actual fraction predicted
+ LOGGER.info(f'{prefix}Using batch-size {b} for {d} {t * fraction:.2f}G/{t:.2f}G ({fraction * 100:.0f}%) ✅')
+ return b
diff --git a/yolov7_seg/det/utils/aws/__init__.py b/yolov7_seg/det/utils/aws/__init__.py
new file mode 100644
index 000000000..e9691f241
--- /dev/null
+++ b/yolov7_seg/det/utils/aws/__init__.py
@@ -0,0 +1 @@
+#init
\ No newline at end of file
diff --git a/yolov7_seg/det/utils/aws/mime.sh b/yolov7_seg/det/utils/aws/mime.sh
new file mode 100644
index 000000000..4a4de18ec
--- /dev/null
+++ b/yolov7_seg/det/utils/aws/mime.sh
@@ -0,0 +1,26 @@
+# AWS EC2 instance startup 'MIME' script https://aws.amazon.com/premiumsupport/knowledge-center/execute-user-data-ec2/
+# This script will run on every instance restart, not only on first start
+# --- DO NOT COPY ABOVE COMMENTS WHEN PASTING INTO USERDATA ---
+
+Content-Type: multipart/mixed; boundary="//"
+MIME-Version: 1.0
+
+--//
+Content-Type: text/cloud-config; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="cloud-config.txt"
+
+#cloud-config
+cloud_final_modules:
+- [scripts-user, always]
+
+--//
+Content-Type: text/x-shellscript; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="userdata.txt"
+
+#!/bin/bash
+# --- paste contents of userdata.sh here ---
+--//
diff --git a/yolov7_seg/det/utils/aws/resume.py b/yolov7_seg/det/utils/aws/resume.py
new file mode 100644
index 000000000..2e7b2d814
--- /dev/null
+++ b/yolov7_seg/det/utils/aws/resume.py
@@ -0,0 +1,40 @@
+# Resume all interrupted trainings in yolov5/ dir including DDP trainings
+# Usage: $ python utils/aws/resume.py
+
+import os
+import sys
+from pathlib import Path
+
+import torch
+import yaml
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[2] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+port = 0 # --master_port
+path = Path('').resolve()
+for last in path.rglob('*/**/last.pt'):
+ ckpt = torch.load(last)
+ if ckpt['optimizer'] is None:
+ continue
+
+ # Load opt.yaml
+ with open(last.parent.parent / 'opt.yaml', errors='ignore') as f:
+ opt = yaml.safe_load(f)
+
+ # Get device count
+ d = opt['device'].split(',') # devices
+ nd = len(d) # number of devices
+ ddp = nd > 1 or (nd == 0 and torch.cuda.device_count() > 1) # distributed data parallel
+
+ if ddp: # multi-GPU
+ port += 1
+ cmd = f'python -m torch.distributed.run --nproc_per_node {nd} --master_port {port} train.py --resume {last}'
+ else: # single-GPU
+ cmd = f'python train.py --resume {last}'
+
+ cmd += ' > /dev/null 2>&1 &' # redirect output to dev/null and run in daemon thread
+ print(cmd)
+ os.system(cmd)
diff --git a/yolov7_seg/det/utils/aws/userdata.sh b/yolov7_seg/det/utils/aws/userdata.sh
new file mode 100644
index 000000000..53527ab84
--- /dev/null
+++ b/yolov7_seg/det/utils/aws/userdata.sh
@@ -0,0 +1,27 @@
+#!/bin/bash
+# AWS EC2 instance startup script https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/user-data.html
+# This script will run only once on first instance start (for a re-start script see mime.sh)
+# /home/ubuntu (ubuntu) or /home/ec2-user (amazon-linux) is working dir
+# Use >300 GB SSD
+
+cd home/ubuntu
+if [ ! -d yolov5 ]; then
+ echo "Running first-time script." # install dependencies, download COCO, pull Docker
+ git clone https://github.com/ultralytics/yolov5 -b master && sudo chmod -R 777 yolov5
+ cd yolov5
+ bash data/scripts/get_coco.sh && echo "COCO done." &
+ sudo docker pull ultralytics/yolov5:latest && echo "Docker done." &
+ python -m pip install --upgrade pip && pip install -r requirements.txt && python detect.py && echo "Requirements done." &
+ wait && echo "All tasks done." # finish background tasks
+else
+ echo "Running re-start script." # resume interrupted runs
+ i=0
+ list=$(sudo docker ps -qa) # container list i.e. $'one\ntwo\nthree\nfour'
+ while IFS= read -r id; do
+ ((i++))
+ echo "restarting container $i: $id"
+ sudo docker start $id
+ # sudo docker exec -it $id python train.py --resume # single-GPU
+ sudo docker exec -d $id python utils/aws/resume.py # multi-scenario
+ done <<<"$list"
+fi
diff --git a/yolov7_seg/det/utils/benchmarks.py b/yolov7_seg/det/utils/benchmarks.py
new file mode 100644
index 000000000..bbb316783
--- /dev/null
+++ b/yolov7_seg/det/utils/benchmarks.py
@@ -0,0 +1,157 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run YOLOv5 benchmarks on all supported export formats
+
+Format | `export.py --include` | Model
+--- | --- | ---
+PyTorch | - | yolov5s.pt
+TorchScript | `torchscript` | yolov5s.torchscript
+ONNX | `onnx` | yolov5s.onnx
+OpenVINO | `openvino` | yolov5s_openvino_model/
+TensorRT | `engine` | yolov5s.engine
+CoreML | `coreml` | yolov5s.mlmodel
+TensorFlow SavedModel | `saved_model` | yolov5s_saved_model/
+TensorFlow GraphDef | `pb` | yolov5s.pb
+TensorFlow Lite | `tflite` | yolov5s.tflite
+TensorFlow Edge TPU | `edgetpu` | yolov5s_edgetpu.tflite
+TensorFlow.js | `tfjs` | yolov5s_web_model/
+
+Requirements:
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu # CPU
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime-gpu openvino-dev tensorflow # GPU
+ $ pip install -U nvidia-tensorrt --index-url https://pypi.ngc.nvidia.com # TensorRT
+
+Usage:
+ $ python utils/benchmarks.py --weights yolov5s.pt --img 640
+"""
+
+import argparse
+import platform
+import sys
+import time
+from pathlib import Path
+
+import pandas as pd
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+# ROOT = ROOT.relative_to(Path.cwd()) # relative
+
+import export
+import val
+from utils import notebook_init
+from utils.general import LOGGER, check_yaml, file_size, print_args
+from utils.torch_utils import select_device
+
+
+def run(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=640, # inference size (pixels)
+ batch_size=1, # batch size
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ half=False, # use FP16 half-precision inference
+ test=False, # test exports only
+ pt_only=False, # test PyTorch only
+ hard_fail=False, # throw error on benchmark failure
+):
+ y, t = [], time.time()
+ device = select_device(device)
+ for i, (name, f, suffix, cpu, gpu) in export.export_formats().iterrows(): # index, (name, file, suffix, CPU, GPU)
+ try:
+ assert i not in (9, 10), 'inference not supported' # Edge TPU and TF.js are unsupported
+ assert i != 5 or platform.system() == 'Darwin', 'inference only supported on macOS>=10.13' # CoreML
+ if 'cpu' in device.type:
+ assert cpu, 'inference not supported on CPU'
+ if 'cuda' in device.type:
+ assert gpu, 'inference not supported on GPU'
+
+ # Export
+ if f == '-':
+ w = weights # PyTorch format
+ else:
+ w = export.run(weights=weights, imgsz=[imgsz], include=[f], device=device, half=half)[-1] # all others
+ assert suffix in str(w), 'export failed'
+
+ # Validate
+ result = val.run(data, w, batch_size, imgsz, plots=False, device=device, task='benchmark', half=half)
+ metrics = result[0] # metrics (mp, mr, map50, map, *losses(box, obj, cls))
+ speeds = result[2] # times (preprocess, inference, postprocess)
+ y.append([name, round(file_size(w), 1), round(metrics[3], 4), round(speeds[1], 2)]) # MB, mAP, t_inference
+ except Exception as e:
+ if hard_fail:
+ assert type(e) is AssertionError, f'Benchmark --hard-fail for {name}: {e}'
+ LOGGER.warning(f'WARNING: Benchmark failure for {name}: {e}')
+ y.append([name, None, None, None]) # mAP, t_inference
+ if pt_only and i == 0:
+ break # break after PyTorch
+
+ # Print results
+ LOGGER.info('\n')
+ parse_opt()
+ notebook_init() # print system info
+ c = ['Format', 'Size (MB)', 'mAP@0.5:0.95', 'Inference time (ms)'] if map else ['Format', 'Export', '', '']
+ py = pd.DataFrame(y, columns=c)
+ LOGGER.info(f'\nBenchmarks complete ({time.time() - t:.2f}s)')
+ LOGGER.info(str(py if map else py.iloc[:, :2]))
+ return py
+
+
+def test(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=640, # inference size (pixels)
+ batch_size=1, # batch size
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ half=False, # use FP16 half-precision inference
+ test=False, # test exports only
+ pt_only=False, # test PyTorch only
+ hard_fail=False, # throw error on benchmark failure
+):
+ y, t = [], time.time()
+ device = select_device(device)
+ for i, (name, f, suffix, gpu) in export.export_formats().iterrows(): # index, (name, file, suffix, gpu-capable)
+ try:
+ w = weights if f == '-' else \
+ export.run(weights=weights, imgsz=[imgsz], include=[f], device=device, half=half)[-1] # weights
+ assert suffix in str(w), 'export failed'
+ y.append([name, True])
+ except Exception:
+ y.append([name, False]) # mAP, t_inference
+
+ # Print results
+ LOGGER.info('\n')
+ parse_opt()
+ notebook_init() # print system info
+ py = pd.DataFrame(y, columns=['Format', 'Export'])
+ LOGGER.info(f'\nExports complete ({time.time() - t:.2f}s)')
+ LOGGER.info(str(py))
+ return py
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='weights path')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--test', action='store_true', help='test exports only')
+ parser.add_argument('--pt-only', action='store_true', help='test PyTorch only')
+ parser.add_argument('--hard-fail', action='store_true', help='throw error on benchmark failure')
+ opt = parser.parse_args()
+ opt.data = check_yaml(opt.data) # check YAML
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ test(**vars(opt)) if opt.test else run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/det/utils/callbacks.py b/yolov7_seg/det/utils/callbacks.py
new file mode 100644
index 000000000..da36a557a
--- /dev/null
+++ b/yolov7_seg/det/utils/callbacks.py
@@ -0,0 +1,71 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Callback utils
+"""
+
+
+class Callbacks:
+ """"
+ Handles all registered callbacks for YOLOv5 Hooks
+ """
+
+ def __init__(self):
+ # Define the available callbacks
+ self._callbacks = {
+ 'on_pretrain_routine_start': [],
+ 'on_pretrain_routine_end': [],
+ 'on_train_start': [],
+ 'on_train_epoch_start': [],
+ 'on_train_batch_start': [],
+ 'optimizer_step': [],
+ 'on_before_zero_grad': [],
+ 'on_train_batch_end': [],
+ 'on_train_epoch_end': [],
+ 'on_val_start': [],
+ 'on_val_batch_start': [],
+ 'on_val_image_end': [],
+ 'on_val_batch_end': [],
+ 'on_val_end': [],
+ 'on_fit_epoch_end': [], # fit = train + val
+ 'on_model_save': [],
+ 'on_train_end': [],
+ 'on_params_update': [],
+ 'teardown': [],}
+ self.stop_training = False # set True to interrupt training
+
+ def register_action(self, hook, name='', callback=None):
+ """
+ Register a new action to a callback hook
+
+ Args:
+ hook: The callback hook name to register the action to
+ name: The name of the action for later reference
+ callback: The callback to fire
+ """
+ assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
+ assert callable(callback), f"callback '{callback}' is not callable"
+ self._callbacks[hook].append({'name': name, 'callback': callback})
+
+ def get_registered_actions(self, hook=None):
+ """"
+ Returns all the registered actions by callback hook
+
+ Args:
+ hook: The name of the hook to check, defaults to all
+ """
+ return self._callbacks[hook] if hook else self._callbacks
+
+ def run(self, hook, *args, **kwargs):
+ """
+ Loop through the registered actions and fire all callbacks
+
+ Args:
+ hook: The name of the hook to check, defaults to all
+ args: Arguments to receive from YOLOv5
+ kwargs: Keyword Arguments to receive from YOLOv5
+ """
+
+ assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
+
+ for logger in self._callbacks[hook]:
+ logger['callback'](*args, **kwargs)
diff --git a/yolov7_seg/det/utils/dataloaders.py b/yolov7_seg/det/utils/dataloaders.py
new file mode 100644
index 000000000..33dbb811f
--- /dev/null
+++ b/yolov7_seg/det/utils/dataloaders.py
@@ -0,0 +1,1157 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Dataloaders and dataset utils
+"""
+
+import contextlib
+import glob
+import hashlib
+import json
+import math
+import os
+import random
+import shutil
+import time
+from itertools import repeat
+from multiprocessing.pool import Pool, ThreadPool
+from pathlib import Path
+from threading import Thread
+from urllib.parse import urlparse
+from zipfile import ZipFile
+
+import numpy as np
+import torch
+import torch.nn.functional as F
+import torchvision
+import yaml
+from PIL import ExifTags, Image, ImageOps
+from torch.utils.data import DataLoader, Dataset, dataloader, distributed
+from tqdm import tqdm
+
+from utils.augmentations import (Albumentations, augment_hsv, classify_albumentations, classify_transforms, copy_paste,
+ letterbox, mixup, random_perspective)
+from utils.general import (DATASETS_DIR, LOGGER, NUM_THREADS, check_dataset, check_requirements, check_yaml, clean_str,
+ cv2, is_colab, is_kaggle, segments2boxes, xyn2xy, xywh2xyxy, xywhn2xyxy, xyxy2xywhn)
+from utils.torch_utils import torch_distributed_zero_first
+
+# Parameters
+HELP_URL = 'https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
+IMG_FORMATS = 'bmp', 'dng', 'jpeg', 'jpg', 'mpo', 'png', 'tif', 'tiff', 'webp' # include image suffixes
+VID_FORMATS = 'asf', 'avi', 'gif', 'm4v', 'mkv', 'mov', 'mp4', 'mpeg', 'mpg', 'ts', 'wmv' # include video suffixes
+BAR_FORMAT = '{l_bar}{bar:10}{r_bar}{bar:-10b}' # tqdm bar format
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+
+# Get orientation exif tag
+for orientation in ExifTags.TAGS.keys():
+ if ExifTags.TAGS[orientation] == 'Orientation':
+ break
+
+
+def get_hash(paths):
+ # Returns a single hash value of a list of paths (files or dirs)
+ size = sum(os.path.getsize(p) for p in paths if os.path.exists(p)) # sizes
+ h = hashlib.md5(str(size).encode()) # hash sizes
+ h.update(''.join(paths).encode()) # hash paths
+ return h.hexdigest() # return hash
+
+
+def exif_size(img):
+ # Returns exif-corrected PIL size
+ s = img.size # (width, height)
+ with contextlib.suppress(Exception):
+ rotation = dict(img._getexif().items())[orientation]
+ if rotation in [6, 8]: # rotation 270 or 90
+ s = (s[1], s[0])
+ return s
+
+
+def exif_transpose(image):
+ """
+ Transpose a PIL image accordingly if it has an EXIF Orientation tag.
+ Inplace version of https://github.com/python-pillow/Pillow/blob/master/src/PIL/ImageOps.py exif_transpose()
+
+ :param image: The image to transpose.
+ :return: An image.
+ """
+ exif = image.getexif()
+ orientation = exif.get(0x0112, 1) # default 1
+ if orientation > 1:
+ method = {
+ 2: Image.FLIP_LEFT_RIGHT,
+ 3: Image.ROTATE_180,
+ 4: Image.FLIP_TOP_BOTTOM,
+ 5: Image.TRANSPOSE,
+ 6: Image.ROTATE_270,
+ 7: Image.TRANSVERSE,
+ 8: Image.ROTATE_90,}.get(orientation)
+ if method is not None:
+ image = image.transpose(method)
+ del exif[0x0112]
+ image.info["exif"] = exif.tobytes()
+ return image
+
+
+def seed_worker(worker_id):
+ # Set dataloader worker seed https://pytorch.org/docs/stable/notes/randomness.html#dataloader
+ worker_seed = torch.initial_seed() % 2 ** 32
+ np.random.seed(worker_seed)
+ random.seed(worker_seed)
+
+
+def create_dataloader(path,
+ imgsz,
+ batch_size,
+ stride,
+ single_cls=False,
+ hyp=None,
+ augment=False,
+ cache=False,
+ pad=0.0,
+ rect=False,
+ rank=-1,
+ workers=8,
+ image_weights=False,
+ quad=False,
+ prefix='',
+ shuffle=False):
+ if rect and shuffle:
+ LOGGER.warning('WARNING: --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ shuffle = False
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = LoadImagesAndLabels(
+ path,
+ imgsz,
+ batch_size,
+ augment=augment, # augmentation
+ hyp=hyp, # hyperparameters
+ rect=rect, # rectangular batches
+ cache_images=cache,
+ single_cls=single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix)
+
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count() # number of CUDA devices
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
+ generator = torch.Generator()
+ generator.manual_seed(0)
+ return loader(dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn,
+ worker_init_fn=seed_worker,
+ generator=generator), dataset
+
+
+class InfiniteDataLoader(dataloader.DataLoader):
+ """ Dataloader that reuses workers
+
+ Uses same syntax as vanilla DataLoader
+ """
+
+ def __init__(self, *args, **kwargs):
+ super().__init__(*args, **kwargs)
+ object.__setattr__(self, 'batch_sampler', _RepeatSampler(self.batch_sampler))
+ self.iterator = super().__iter__()
+
+ def __len__(self):
+ return len(self.batch_sampler.sampler)
+
+ def __iter__(self):
+ for _ in range(len(self)):
+ yield next(self.iterator)
+
+
+class _RepeatSampler:
+ """ Sampler that repeats forever
+
+ Args:
+ sampler (Sampler)
+ """
+
+ def __init__(self, sampler):
+ self.sampler = sampler
+
+ def __iter__(self):
+ while True:
+ yield from iter(self.sampler)
+
+
+class LoadImages:
+ # YOLOv5 image/video dataloader, i.e. `python detect.py --source image.jpg/vid.mp4`
+ def __init__(self, path, img_size=640, stride=32, auto=True):
+ files = []
+ for p in sorted(path) if isinstance(path, (list, tuple)) else [path]:
+ p = str(Path(p).resolve())
+ if '*' in p:
+ files.extend(sorted(glob.glob(p, recursive=True))) # glob
+ elif os.path.isdir(p):
+ files.extend(sorted(glob.glob(os.path.join(p, '*.*')))) # dir
+ elif os.path.isfile(p):
+ files.append(p) # files
+ else:
+ raise FileNotFoundError(f'{p} does not exist')
+
+ images = [x for x in files if x.split('.')[-1].lower() in IMG_FORMATS]
+ videos = [x for x in files if x.split('.')[-1].lower() in VID_FORMATS]
+ ni, nv = len(images), len(videos)
+
+ self.img_size = img_size
+ self.stride = stride
+ self.files = images + videos
+ self.nf = ni + nv # number of files
+ self.video_flag = [False] * ni + [True] * nv
+ self.mode = 'image'
+ self.auto = auto
+ if any(videos):
+ self.new_video(videos[0]) # new video
+ else:
+ self.cap = None
+ assert self.nf > 0, f'No images or videos found in {p}. ' \
+ f'Supported formats are:\nimages: {IMG_FORMATS}\nvideos: {VID_FORMATS}'
+
+ def __iter__(self):
+ self.count = 0
+ return self
+
+ def __next__(self):
+ if self.count == self.nf:
+ raise StopIteration
+ path = self.files[self.count]
+
+ if self.video_flag[self.count]:
+ # Read video
+ self.mode = 'video'
+ ret_val, img0 = self.cap.read()
+ while not ret_val:
+ self.count += 1
+ self.cap.release()
+ if self.count == self.nf: # last video
+ raise StopIteration
+ path = self.files[self.count]
+ self.new_video(path)
+ ret_val, img0 = self.cap.read()
+
+ self.frame += 1
+ s = f'video {self.count + 1}/{self.nf} ({self.frame}/{self.frames}) {path}: '
+
+ else:
+ # Read image
+ self.count += 1
+ img0 = cv2.imread(path) # BGR
+ assert img0 is not None, f'Image Not Found {path}'
+ s = f'image {self.count}/{self.nf} {path}: '
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride, auto=self.auto)[0]
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return path, img, img0, self.cap, s
+
+ def new_video(self, path):
+ self.frame = 0
+ self.cap = cv2.VideoCapture(path)
+ self.frames = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
+
+ def __len__(self):
+ return self.nf # number of files
+
+
+class LoadWebcam: # for inference
+ # YOLOv5 local webcam dataloader, i.e. `python detect.py --source 0`
+ def __init__(self, pipe='0', img_size=640, stride=32):
+ self.img_size = img_size
+ self.stride = stride
+ self.pipe = eval(pipe) if pipe.isnumeric() else pipe
+ self.cap = cv2.VideoCapture(self.pipe) # video capture object
+ self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ self.cap.release()
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Read frame
+ ret_val, img0 = self.cap.read()
+ img0 = cv2.flip(img0, 1) # flip left-right
+
+ # Print
+ assert ret_val, f'Camera Error {self.pipe}'
+ img_path = 'webcam.jpg'
+ s = f'webcam {self.count}: '
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return img_path, img, img0, None, s
+
+ def __len__(self):
+ return 0
+
+
+class LoadStreams:
+ # YOLOv5 streamloader, i.e. `python detect.py --source 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP streams`
+ def __init__(self, sources='streams.txt', img_size=640, stride=32, auto=True):
+ self.mode = 'stream'
+ self.img_size = img_size
+ self.stride = stride
+
+ if os.path.isfile(sources):
+ with open(sources) as f:
+ sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
+ else:
+ sources = [sources]
+
+ n = len(sources)
+ self.imgs, self.fps, self.frames, self.threads = [None] * n, [0] * n, [0] * n, [None] * n
+ self.sources = [clean_str(x) for x in sources] # clean source names for later
+ self.auto = auto
+ for i, s in enumerate(sources): # index, source
+ # Start thread to read frames from video stream
+ st = f'{i + 1}/{n}: {s}... '
+ if urlparse(s).hostname in ('www.youtube.com', 'youtube.com', 'youtu.be'): # if source is YouTube video
+ check_requirements(('pafy', 'youtube_dl==2020.12.2'))
+ import pafy
+ s = pafy.new(s).getbest(preftype="mp4").url # YouTube URL
+ s = eval(s) if s.isnumeric() else s # i.e. s = '0' local webcam
+ if s == 0:
+ assert not is_colab(), '--source 0 webcam unsupported on Colab. Rerun command in a local environment.'
+ assert not is_kaggle(), '--source 0 webcam unsupported on Kaggle. Rerun command in a local environment.'
+ cap = cv2.VideoCapture(s)
+ assert cap.isOpened(), f'{st}Failed to open {s}'
+ w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ fps = cap.get(cv2.CAP_PROP_FPS) # warning: may return 0 or nan
+ self.frames[i] = max(int(cap.get(cv2.CAP_PROP_FRAME_COUNT)), 0) or float('inf') # infinite stream fallback
+ self.fps[i] = max((fps if math.isfinite(fps) else 0) % 100, 0) or 30 # 30 FPS fallback
+
+ _, self.imgs[i] = cap.read() # guarantee first frame
+ self.threads[i] = Thread(target=self.update, args=([i, cap, s]), daemon=True)
+ LOGGER.info(f"{st} Success ({self.frames[i]} frames {w}x{h} at {self.fps[i]:.2f} FPS)")
+ self.threads[i].start()
+ LOGGER.info('') # newline
+
+ # check for common shapes
+ s = np.stack([letterbox(x, self.img_size, stride=self.stride, auto=self.auto)[0].shape for x in self.imgs])
+ self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
+ if not self.rect:
+ LOGGER.warning('WARNING: Stream shapes differ. For optimal performance supply similarly-shaped streams.')
+
+ def update(self, i, cap, stream):
+ # Read stream `i` frames in daemon thread
+ n, f, read = 0, self.frames[i], 1 # frame number, frame array, inference every 'read' frame
+ while cap.isOpened() and n < f:
+ n += 1
+ # _, self.imgs[index] = cap.read()
+ cap.grab()
+ if n % read == 0:
+ success, im = cap.retrieve()
+ if success:
+ self.imgs[i] = im
+ else:
+ LOGGER.warning('WARNING: Video stream unresponsive, please check your IP camera connection.')
+ self.imgs[i] = np.zeros_like(self.imgs[i])
+ cap.open(stream) # re-open stream if signal was lost
+ time.sleep(0.0) # wait time
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if not all(x.is_alive() for x in self.threads) or cv2.waitKey(1) == ord('q'): # q to quit
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Letterbox
+ img0 = self.imgs.copy()
+ img = [letterbox(x, self.img_size, stride=self.stride, auto=self.rect and self.auto)[0] for x in img0]
+
+ # Stack
+ img = np.stack(img, 0)
+
+ # Convert
+ img = img[..., ::-1].transpose((0, 3, 1, 2)) # BGR to RGB, BHWC to BCHW
+ img = np.ascontiguousarray(img)
+
+ return self.sources, img, img0, None, ''
+
+ def __len__(self):
+ return len(self.sources) # 1E12 frames = 32 streams at 30 FPS for 30 years
+
+
+def img2label_paths(img_paths):
+ # Define label paths as a function of image paths
+ sa, sb = f'{os.sep}images{os.sep}', f'{os.sep}labels{os.sep}' # /images/, /labels/ substrings
+ return [sb.join(x.rsplit(sa, 1)).rsplit('.', 1)[0] + '.txt' for x in img_paths]
+
+
+class LoadImagesAndLabels(Dataset):
+ # YOLOv5 train_loader/val_loader, loads images and labels for training and validation
+ cache_version = 0.6 # dataset labels *.cache version
+ rand_interp_methods = [cv2.INTER_NEAREST, cv2.INTER_LINEAR, cv2.INTER_CUBIC, cv2.INTER_AREA, cv2.INTER_LANCZOS4]
+
+ def __init__(self,
+ path,
+ img_size=640,
+ batch_size=16,
+ augment=False,
+ hyp=None,
+ rect=False,
+ image_weights=False,
+ cache_images=False,
+ single_cls=False,
+ stride=32,
+ pad=0.0,
+ prefix=''):
+ self.img_size = img_size
+ self.augment = augment
+ self.hyp = hyp
+ self.image_weights = image_weights
+ self.rect = False if image_weights else rect
+ self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
+ self.mosaic_border = [-img_size // 2, -img_size // 2]
+ self.stride = stride
+ self.path = path
+ self.albumentations = Albumentations() if augment else None
+
+ try:
+ f = [] # image files
+ for p in path if isinstance(path, list) else [path]:
+ p = Path(p) # os-agnostic
+ if p.is_dir(): # dir
+ f += glob.glob(str(p / '**' / '*.*'), recursive=True)
+ # f = list(p.rglob('*.*')) # pathlib
+ elif p.is_file(): # file
+ with open(p) as t:
+ t = t.read().strip().splitlines()
+ parent = str(p.parent) + os.sep
+ f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
+ # f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
+ else:
+ raise FileNotFoundError(f'{prefix}{p} does not exist')
+ self.im_files = sorted(x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in IMG_FORMATS)
+ # self.img_files = sorted([x for x in f if x.suffix[1:].lower() in IMG_FORMATS]) # pathlib
+ assert self.im_files, f'{prefix}No images found'
+ except Exception as e:
+ raise Exception(f'{prefix}Error loading data from {path}: {e}\nSee {HELP_URL}')
+
+ # Check cache
+ self.label_files = img2label_paths(self.im_files) # labels
+ cache_path = (p if p.is_file() else Path(self.label_files[0]).parent).with_suffix('.cache')
+ try:
+ cache, exists = np.load(cache_path, allow_pickle=True).item(), True # load dict
+ assert cache['version'] == self.cache_version # matches current version
+ assert cache['hash'] == get_hash(self.label_files + self.im_files) # identical hash
+ except Exception:
+ cache, exists = self.cache_labels(cache_path, prefix), False # run cache ops
+
+ # Display cache
+ nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupt, total
+ if exists and LOCAL_RANK in {-1, 0}:
+ d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupt"
+ tqdm(None, desc=prefix + d, total=n, initial=n, bar_format=BAR_FORMAT) # display cache results
+ if cache['msgs']:
+ LOGGER.info('\n'.join(cache['msgs'])) # display warnings
+ assert nf > 0 or not augment, f'{prefix}No labels in {cache_path}. Can not train without labels. See {HELP_URL}'
+
+ # Read cache
+ [cache.pop(k) for k in ('hash', 'version', 'msgs')] # remove items
+ labels, shapes, self.segments = zip(*cache.values())
+ self.labels = list(labels)
+ self.shapes = np.array(shapes)
+ self.im_files = list(cache.keys()) # update
+ self.label_files = img2label_paths(cache.keys()) # update
+ n = len(shapes) # number of images
+ bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
+ nb = bi[-1] + 1 # number of batches
+ self.batch = bi # batch index of image
+ self.n = n
+ self.indices = range(n)
+
+ # Update labels
+ include_class = [] # filter labels to include only these classes (optional)
+ include_class_array = np.array(include_class).reshape(1, -1)
+ for i, (label, segment) in enumerate(zip(self.labels, self.segments)):
+ if include_class:
+ j = (label[:, 0:1] == include_class_array).any(1)
+ self.labels[i] = label[j]
+ if segment:
+ self.segments[i] = segment[j]
+ if single_cls: # single-class training, merge all classes into 0
+ self.labels[i][:, 0] = 0
+ if segment:
+ self.segments[i][:, 0] = 0
+
+ # Rectangular Training
+ if self.rect:
+ # Sort by aspect ratio
+ s = self.shapes # wh
+ ar = s[:, 1] / s[:, 0] # aspect ratio
+ irect = ar.argsort()
+ self.im_files = [self.im_files[i] for i in irect]
+ self.label_files = [self.label_files[i] for i in irect]
+ self.labels = [self.labels[i] for i in irect]
+ self.shapes = s[irect] # wh
+ ar = ar[irect]
+
+ # Set training image shapes
+ shapes = [[1, 1]] * nb
+ for i in range(nb):
+ ari = ar[bi == i]
+ mini, maxi = ari.min(), ari.max()
+ if maxi < 1:
+ shapes[i] = [maxi, 1]
+ elif mini > 1:
+ shapes[i] = [1, 1 / mini]
+
+ self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(np.int) * stride
+
+ # Cache images into RAM/disk for faster training (WARNING: large datasets may exceed system resources)
+ self.ims = [None] * n
+ self.npy_files = [Path(f).with_suffix('.npy') for f in self.im_files]
+ if cache_images:
+ gb = 0 # Gigabytes of cached images
+ self.im_hw0, self.im_hw = [None] * n, [None] * n
+ fcn = self.cache_images_to_disk if cache_images == 'disk' else self.load_image
+ results = ThreadPool(NUM_THREADS).imap(fcn, range(n))
+ pbar = tqdm(enumerate(results), total=n, bar_format=BAR_FORMAT, disable=LOCAL_RANK > 0)
+ for i, x in pbar:
+ if cache_images == 'disk':
+ gb += self.npy_files[i].stat().st_size
+ else: # 'ram'
+ self.ims[i], self.im_hw0[i], self.im_hw[i] = x # im, hw_orig, hw_resized = load_image(self, i)
+ gb += self.ims[i].nbytes
+ pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB {cache_images})'
+ pbar.close()
+
+ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
+ # Cache dataset labels, check images and read shapes
+ x = {} # dict
+ nm, nf, ne, nc, msgs = 0, 0, 0, 0, [] # number missing, found, empty, corrupt, messages
+ desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels..."
+ with Pool(NUM_THREADS) as pool:
+ pbar = tqdm(pool.imap(verify_image_label, zip(self.im_files, self.label_files, repeat(prefix))),
+ desc=desc,
+ total=len(self.im_files),
+ bar_format=BAR_FORMAT)
+ for im_file, lb, shape, segments, nm_f, nf_f, ne_f, nc_f, msg in pbar:
+ nm += nm_f
+ nf += nf_f
+ ne += ne_f
+ nc += nc_f
+ if im_file:
+ x[im_file] = [lb, shape, segments]
+ if msg:
+ msgs.append(msg)
+ pbar.desc = f"{desc}{nf} found, {nm} missing, {ne} empty, {nc} corrupt"
+
+ pbar.close()
+ if msgs:
+ LOGGER.info('\n'.join(msgs))
+ if nf == 0:
+ LOGGER.warning(f'{prefix}WARNING: No labels found in {path}. See {HELP_URL}')
+ x['hash'] = get_hash(self.label_files + self.im_files)
+ x['results'] = nf, nm, ne, nc, len(self.im_files)
+ x['msgs'] = msgs # warnings
+ x['version'] = self.cache_version # cache version
+ try:
+ np.save(path, x) # save cache for next time
+ path.with_suffix('.cache.npy').rename(path) # remove .npy suffix
+ LOGGER.info(f'{prefix}New cache created: {path}')
+ except Exception as e:
+ LOGGER.warning(f'{prefix}WARNING: Cache directory {path.parent} is not writeable: {e}') # not writeable
+ return x
+
+ def __len__(self):
+ return len(self.im_files)
+
+ # def __iter__(self):
+ # self.count = -1
+ # print('ran dataset iter')
+ # #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
+ # return self
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ if mosaic:
+ # Load mosaic
+ img, labels = self.load_mosaic(index)
+ shapes = None
+
+ # MixUp augmentation
+ if random.random() < hyp['mixup']:
+ img, labels = mixup(img, labels, *self.load_mosaic(random.randint(0, self.n - 1)))
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = self.load_image(index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ img, labels = random_perspective(img,
+ labels,
+ degrees=hyp['degrees'],
+ translate=hyp['translate'],
+ scale=hyp['scale'],
+ shear=hyp['shear'],
+ perspective=hyp['perspective'])
+
+ nl = len(labels) # number of labels
+ if nl:
+ labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1E-3)
+
+ if self.augment:
+ # Albumentations
+ img, labels = self.albumentations(img, labels)
+ nl = len(labels) # update after albumentations
+
+ # HSV color-space
+ augment_hsv(img, hgain=hyp['hsv_h'], sgain=hyp['hsv_s'], vgain=hyp['hsv_v'])
+
+ # Flip up-down
+ if random.random() < hyp['flipud']:
+ img = np.flipud(img)
+ if nl:
+ labels[:, 2] = 1 - labels[:, 2]
+
+ # Flip left-right
+ if random.random() < hyp['fliplr']:
+ img = np.fliplr(img)
+ if nl:
+ labels[:, 1] = 1 - labels[:, 1]
+
+ # Cutouts
+ # labels = cutout(img, labels, p=0.5)
+ # nl = len(labels) # update after cutout
+
+ labels_out = torch.zeros((nl, 6))
+ if nl:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return torch.from_numpy(img), labels_out, self.im_files[index], shapes
+
+ def load_image(self, i):
+ # Loads 1 image from dataset index 'i', returns (im, original hw, resized hw)
+ im, f, fn = self.ims[i], self.im_files[i], self.npy_files[i],
+ if im is None: # not cached in RAM
+ if fn.exists(): # load npy
+ im = np.load(fn)
+ else: # read image
+ im = cv2.imread(f) # BGR
+ assert im is not None, f'Image Not Found {f}'
+ h0, w0 = im.shape[:2] # orig hw
+ r = self.img_size / max(h0, w0) # ratio
+ if r != 1: # if sizes are not equal
+ interp = cv2.INTER_LINEAR if (self.augment or r > 1) else cv2.INTER_AREA
+ im = cv2.resize(im, (int(w0 * r), int(h0 * r)), interpolation=interp)
+ return im, (h0, w0), im.shape[:2] # im, hw_original, hw_resized
+ return self.ims[i], self.im_hw0[i], self.im_hw[i] # im, hw_original, hw_resized
+
+ def cache_images_to_disk(self, i):
+ # Saves an image as an *.npy file for faster loading
+ f = self.npy_files[i]
+ if not f.exists():
+ np.save(f.as_posix(), cv2.imread(self.im_files[i]))
+
+ def load_mosaic(self, index):
+ # YOLOv5 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ random.shuffle(indices)
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp['copy_paste'])
+ img4, labels4 = random_perspective(img4,
+ labels4,
+ segments4,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img4, labels4
+
+ def load_mosaic9(self, index):
+ # YOLOv5 9-mosaic loader. Loads 1 image + 8 random images into a 9-image mosaic
+ labels9, segments9 = [], []
+ s = self.img_size
+ indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
+ random.shuffle(indices)
+ hp, wp = -1, -1 # height, width previous
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img9
+ if i == 0: # center
+ img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ h0, w0 = h, w
+ c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
+ elif i == 1: # top
+ c = s, s - h, s + w, s
+ elif i == 2: # top right
+ c = s + wp, s - h, s + wp + w, s
+ elif i == 3: # right
+ c = s + w0, s, s + w0 + w, s + h
+ elif i == 4: # bottom right
+ c = s + w0, s + hp, s + w0 + w, s + hp + h
+ elif i == 5: # bottom
+ c = s + w0 - w, s + h0, s + w0, s + h0 + h
+ elif i == 6: # bottom left
+ c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
+ elif i == 7: # left
+ c = s - w, s + h0 - h, s, s + h0
+ elif i == 8: # top left
+ c = s - w, s + h0 - hp - h, s, s + h0 - hp
+
+ padx, pady = c[:2]
+ x1, y1, x2, y2 = (max(x, 0) for x in c) # allocate coords
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
+ labels9.append(labels)
+ segments9.extend(segments)
+
+ # Image
+ img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
+ hp, wp = h, w # height, width previous
+
+ # Offset
+ yc, xc = (int(random.uniform(0, s)) for _ in self.mosaic_border) # mosaic center x, y
+ img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
+
+ # Concat/clip labels
+ labels9 = np.concatenate(labels9, 0)
+ labels9[:, [1, 3]] -= xc
+ labels9[:, [2, 4]] -= yc
+ c = np.array([xc, yc]) # centers
+ segments9 = [x - c for x in segments9]
+
+ for x in (labels9[:, 1:], *segments9):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img9, labels9 = replicate(img9, labels9) # replicate
+
+ # Augment
+ img9, labels9 = random_perspective(img9,
+ labels9,
+ segments9,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img9, labels9
+
+ @staticmethod
+ def collate_fn(batch):
+ im, label, path, shapes = zip(*batch) # transposed
+ for i, lb in enumerate(label):
+ lb[:, 0] = i # add target image index for build_targets()
+ return torch.stack(im, 0), torch.cat(label, 0), path, shapes
+
+ @staticmethod
+ def collate_fn4(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ n = len(shapes) // 4
+ im4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
+
+ ho = torch.tensor([[0.0, 0, 0, 1, 0, 0]])
+ wo = torch.tensor([[0.0, 0, 1, 0, 0, 0]])
+ s = torch.tensor([[1, 1, 0.5, 0.5, 0.5, 0.5]]) # scale
+ for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
+ i *= 4
+ if random.random() < 0.5:
+ im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2.0, mode='bilinear',
+ align_corners=False)[0].type(img[i].type())
+ lb = label[i]
+ else:
+ im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
+ lb = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
+ im4.append(im)
+ label4.append(lb)
+
+ for i, lb in enumerate(label4):
+ lb[:, 0] = i # add target image index for build_targets()
+
+ return torch.stack(im4, 0), torch.cat(label4, 0), path4, shapes4
+
+
+# Ancillary functions --------------------------------------------------------------------------------------------------
+def flatten_recursive(path=DATASETS_DIR / 'coco128'):
+ # Flatten a recursive directory by bringing all files to top level
+ new_path = Path(f'{str(path)}_flat')
+ if os.path.exists(new_path):
+ shutil.rmtree(new_path) # delete output folder
+ os.makedirs(new_path) # make new output folder
+ for file in tqdm(glob.glob(f'{str(Path(path))}/**/*.*', recursive=True)):
+ shutil.copyfile(file, new_path / Path(file).name)
+
+
+def extract_boxes(path=DATASETS_DIR / 'coco128'): # from utils.dataloaders import *; extract_boxes()
+ # Convert detection dataset into classification dataset, with one directory per class
+ path = Path(path) # images dir
+ shutil.rmtree(path / 'classification') if (path / 'classification').is_dir() else None # remove existing
+ files = list(path.rglob('*.*'))
+ n = len(files) # number of files
+ for im_file in tqdm(files, total=n):
+ if im_file.suffix[1:] in IMG_FORMATS:
+ # image
+ im = cv2.imread(str(im_file))[..., ::-1] # BGR to RGB
+ h, w = im.shape[:2]
+
+ # labels
+ lb_file = Path(img2label_paths([str(im_file)])[0])
+ if Path(lb_file).exists():
+ with open(lb_file) as f:
+ lb = np.array([x.split() for x in f.read().strip().splitlines()], dtype=np.float32) # labels
+
+ for j, x in enumerate(lb):
+ c = int(x[0]) # class
+ f = (path / 'classifier') / f'{c}' / f'{path.stem}_{im_file.stem}_{j}.jpg' # new filename
+ if not f.parent.is_dir():
+ f.parent.mkdir(parents=True)
+
+ b = x[1:] * [w, h, w, h] # box
+ # b[2:] = b[2:].max() # rectangle to square
+ b[2:] = b[2:] * 1.2 + 3 # pad
+ b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
+
+ b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
+ b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
+ assert cv2.imwrite(str(f), im[b[1]:b[3], b[0]:b[2]]), f'box failure in {f}'
+
+
+def autosplit(path=DATASETS_DIR / 'coco128/images', weights=(0.9, 0.1, 0.0), annotated_only=False):
+ """ Autosplit a dataset into train/val/test splits and save path/autosplit_*.txt files
+ Usage: from utils.dataloaders import *; autosplit()
+ Arguments
+ path: Path to images directory
+ weights: Train, val, test weights (list, tuple)
+ annotated_only: Only use images with an annotated txt file
+ """
+ path = Path(path) # images dir
+ files = sorted(x for x in path.rglob('*.*') if x.suffix[1:].lower() in IMG_FORMATS) # image files only
+ n = len(files) # number of files
+ random.seed(0) # for reproducibility
+ indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
+
+ txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
+ [(path.parent / x).unlink(missing_ok=True) for x in txt] # remove existing
+
+ print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
+ for i, img in tqdm(zip(indices, files), total=n):
+ if not annotated_only or Path(img2label_paths([str(img)])[0]).exists(): # check label
+ with open(path.parent / txt[i], 'a') as f:
+ f.write(f'./{img.relative_to(path.parent).as_posix()}' + '\n') # add image to txt file
+
+
+def verify_image_label(args):
+ # Verify one image-label pair
+ im_file, lb_file, prefix = args
+ nm, nf, ne, nc, msg, segments = 0, 0, 0, 0, '', [] # number (missing, found, empty, corrupt), message, segments
+ try:
+ # verify images
+ im = Image.open(im_file)
+ im.verify() # PIL verify
+ shape = exif_size(im) # image size
+ assert (shape[0] > 9) & (shape[1] > 9), f'image size {shape} <10 pixels'
+ assert im.format.lower() in IMG_FORMATS, f'invalid image format {im.format}'
+ if im.format.lower() in ('jpg', 'jpeg'):
+ with open(im_file, 'rb') as f:
+ f.seek(-2, 2)
+ if f.read() != b'\xff\xd9': # corrupt JPEG
+ ImageOps.exif_transpose(Image.open(im_file)).save(im_file, 'JPEG', subsampling=0, quality=100)
+ msg = f'{prefix}WARNING: {im_file}: corrupt JPEG restored and saved'
+
+ # verify labels
+ if os.path.isfile(lb_file):
+ nf = 1 # label found
+ with open(lb_file) as f:
+ lb = [x.split() for x in f.read().strip().splitlines() if len(x)]
+ if any(len(x) > 6 for x in lb): # is segment
+ classes = np.array([x[0] for x in lb], dtype=np.float32)
+ segments = [np.array(x[1:], dtype=np.float32).reshape(-1, 2) for x in lb] # (cls, xy1...)
+ lb = np.concatenate((classes.reshape(-1, 1), segments2boxes(segments)), 1) # (cls, xywh)
+ lb = np.array(lb, dtype=np.float32)
+ nl = len(lb)
+ if nl:
+ assert lb.shape[1] == 5, f'labels require 5 columns, {lb.shape[1]} columns detected'
+ assert (lb >= 0).all(), f'negative label values {lb[lb < 0]}'
+ assert (lb[:, 1:] <= 1).all(), f'non-normalized or out of bounds coordinates {lb[:, 1:][lb[:, 1:] > 1]}'
+ _, i = np.unique(lb, axis=0, return_index=True)
+ if len(i) < nl: # duplicate row check
+ lb = lb[i] # remove duplicates
+ if segments:
+ #segments = segments[i]
+ segments = [segments[x] for x in i]
+ msg = f'{prefix}WARNING: {im_file}: {nl - len(i)} duplicate labels removed'
+ else:
+ ne = 1 # label empty
+ lb = np.zeros((0, 5), dtype=np.float32)
+ else:
+ nm = 1 # label missing
+ lb = np.zeros((0, 5), dtype=np.float32)
+ return im_file, lb, shape, segments, nm, nf, ne, nc, msg
+ except Exception as e:
+ nc = 1
+ msg = f'{prefix}WARNING: {im_file}: ignoring corrupt image/label: {e}'
+ return [None, None, None, None, nm, nf, ne, nc, msg]
+
+
+class HUBDatasetStats():
+ """ Return dataset statistics dictionary with images and instances counts per split per class
+ To run in parent directory: export PYTHONPATH="$PWD/yolov5"
+ Usage1: from utils.dataloaders import *; HUBDatasetStats('coco128.yaml', autodownload=True)
+ Usage2: from utils.dataloaders import *; HUBDatasetStats('path/to/coco128_with_yaml.zip')
+ Arguments
+ path: Path to data.yaml or data.zip (with data.yaml inside data.zip)
+ autodownload: Attempt to download dataset if not found locally
+ """
+
+ def __init__(self, path='coco128.yaml', autodownload=False):
+ # Initialize class
+ zipped, data_dir, yaml_path = self._unzip(Path(path))
+ try:
+ with open(check_yaml(yaml_path), errors='ignore') as f:
+ data = yaml.safe_load(f) # data dict
+ if zipped:
+ data['path'] = data_dir
+ except Exception as e:
+ raise Exception("error/HUB/dataset_stats/yaml_load") from e
+
+ check_dataset(data, autodownload) # download dataset if missing
+ self.hub_dir = Path(data['path'] + '-hub')
+ self.im_dir = self.hub_dir / 'images'
+ self.im_dir.mkdir(parents=True, exist_ok=True) # makes /images
+ self.stats = {'nc': data['nc'], 'names': data['names']} # statistics dictionary
+ self.data = data
+
+ @staticmethod
+ def _find_yaml(dir):
+ # Return data.yaml file
+ files = list(dir.glob('*.yaml')) or list(dir.rglob('*.yaml')) # try root level first and then recursive
+ assert files, f'No *.yaml file found in {dir}'
+ if len(files) > 1:
+ files = [f for f in files if f.stem == dir.stem] # prefer *.yaml files that match dir name
+ assert files, f'Multiple *.yaml files found in {dir}, only 1 *.yaml file allowed'
+ assert len(files) == 1, f'Multiple *.yaml files found: {files}, only 1 *.yaml file allowed in {dir}'
+ return files[0]
+
+ def _unzip(self, path):
+ # Unzip data.zip
+ if not str(path).endswith('.zip'): # path is data.yaml
+ return False, None, path
+ assert Path(path).is_file(), f'Error unzipping {path}, file not found'
+ ZipFile(path).extractall(path=path.parent) # unzip
+ dir = path.with_suffix('') # dataset directory == zip name
+ assert dir.is_dir(), f'Error unzipping {path}, {dir} not found. path/to/abc.zip MUST unzip to path/to/abc/'
+ return True, str(dir), self._find_yaml(dir) # zipped, data_dir, yaml_path
+
+ def _hub_ops(self, f, max_dim=1920):
+ # HUB ops for 1 image 'f': resize and save at reduced quality in /dataset-hub for web/app viewing
+ f_new = self.im_dir / Path(f).name # dataset-hub image filename
+ try: # use PIL
+ im = Image.open(f)
+ r = max_dim / max(im.height, im.width) # ratio
+ if r < 1.0: # image too large
+ im = im.resize((int(im.width * r), int(im.height * r)))
+ im.save(f_new, 'JPEG', quality=50, optimize=True) # save
+ except Exception as e: # use OpenCV
+ print(f'WARNING: HUB ops PIL failure {f}: {e}')
+ im = cv2.imread(f)
+ im_height, im_width = im.shape[:2]
+ r = max_dim / max(im_height, im_width) # ratio
+ if r < 1.0: # image too large
+ im = cv2.resize(im, (int(im_width * r), int(im_height * r)), interpolation=cv2.INTER_AREA)
+ cv2.imwrite(str(f_new), im)
+
+ def get_json(self, save=False, verbose=False):
+ # Return dataset JSON for Ultralytics HUB
+ def _round(labels):
+ # Update labels to integer class and 6 decimal place floats
+ return [[int(c), *(round(x, 4) for x in points)] for c, *points in labels]
+
+ for split in 'train', 'val', 'test':
+ if self.data.get(split) is None:
+ self.stats[split] = None # i.e. no test set
+ continue
+ dataset = LoadImagesAndLabels(self.data[split]) # load dataset
+ x = np.array([
+ np.bincount(label[:, 0].astype(int), minlength=self.data['nc'])
+ for label in tqdm(dataset.labels, total=dataset.n, desc='Statistics')]) # shape(128x80)
+ self.stats[split] = {
+ 'instance_stats': {
+ 'total': int(x.sum()),
+ 'per_class': x.sum(0).tolist()},
+ 'image_stats': {
+ 'total': dataset.n,
+ 'unlabelled': int(np.all(x == 0, 1).sum()),
+ 'per_class': (x > 0).sum(0).tolist()},
+ 'labels': [{
+ str(Path(k).name): _round(v.tolist())} for k, v in zip(dataset.im_files, dataset.labels)]}
+
+ # Save, print and return
+ if save:
+ stats_path = self.hub_dir / 'stats.json'
+ print(f'Saving {stats_path.resolve()}...')
+ with open(stats_path, 'w') as f:
+ json.dump(self.stats, f) # save stats.json
+ if verbose:
+ print(json.dumps(self.stats, indent=2, sort_keys=False))
+ return self.stats
+
+ def process_images(self):
+ # Compress images for Ultralytics HUB
+ for split in 'train', 'val', 'test':
+ if self.data.get(split) is None:
+ continue
+ dataset = LoadImagesAndLabels(self.data[split]) # load dataset
+ desc = f'{split} images'
+ for _ in tqdm(ThreadPool(NUM_THREADS).imap(self._hub_ops, dataset.im_files), total=dataset.n, desc=desc):
+ pass
+ print(f'Done. All images saved to {self.im_dir}')
+ return self.im_dir
+
+
+# Classification dataloaders -------------------------------------------------------------------------------------------
+class ClassificationDataset(torchvision.datasets.ImageFolder):
+ """
+ YOLOv5 Classification Dataset.
+ Arguments
+ root: Dataset path
+ transform: torchvision transforms, used by default
+ album_transform: Albumentations transforms, used if installed
+ """
+
+ def __init__(self, root, augment, imgsz, cache=False):
+ super().__init__(root=root)
+ self.torch_transforms = classify_transforms(imgsz)
+ self.album_transforms = classify_albumentations(augment, imgsz) if augment else None
+ self.cache_ram = cache is True or cache == 'ram'
+ self.cache_disk = cache == 'disk'
+ self.samples = [list(x) + [Path(x[0]).with_suffix('.npy'), None] for x in self.samples] # file, index, npy, im
+
+ def __getitem__(self, i):
+ f, j, fn, im = self.samples[i] # filename, index, filename.with_suffix('.npy'), image
+ if self.album_transforms:
+ if self.cache_ram and im is None:
+ im = self.samples[i][3] = cv2.imread(f)
+ elif self.cache_disk:
+ if not fn.exists(): # load npy
+ np.save(fn.as_posix(), cv2.imread(f))
+ im = np.load(fn)
+ else: # read image
+ im = cv2.imread(f) # BGR
+ sample = self.album_transforms(image=cv2.cvtColor(im, cv2.COLOR_BGR2RGB))["image"]
+ else:
+ sample = self.torch_transforms(self.loader(f))
+ return sample, j
+
+
+def create_classification_dataloader(path,
+ imgsz=224,
+ batch_size=16,
+ augment=True,
+ cache=False,
+ rank=-1,
+ workers=8,
+ shuffle=True):
+ # Returns Dataloader object to be used with YOLOv5 Classifier
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = ClassificationDataset(root=path, imgsz=imgsz, augment=augment, cache=cache)
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count()
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers])
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ generator = torch.Generator()
+ generator.manual_seed(0)
+ return InfiniteDataLoader(dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ worker_init_fn=seed_worker,
+ generator=generator) # or DataLoader(persistent_workers=True)
diff --git a/yolov7_seg/det/utils/docker/Dockerfile b/yolov7_seg/det/utils/docker/Dockerfile
new file mode 100644
index 000000000..d421c20c3
--- /dev/null
+++ b/yolov7_seg/det/utils/docker/Dockerfile
@@ -0,0 +1,68 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is CUDA-optimized for YOLOv5 single/multi-GPU training and inference
+
+# Start FROM NVIDIA PyTorch image https://ngc.nvidia.com/catalog/containers/nvidia:pytorch
+FROM nvcr.io/nvidia/pytorch:22.07-py3
+RUN rm -rf /opt/pytorch # remove 1.2GB dir
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update && apt install --no-install-recommends -y zip htop screen libgl1-mesa-glx
+
+# Install pip packages
+COPY requirements.txt .
+RUN python -m pip install --upgrade pip wheel
+RUN pip uninstall -y Pillow torchtext # torch torchvision
+RUN pip install --no-cache -r requirements.txt albumentations wandb gsutil notebook Pillow>=9.1.0 \
+ 'opencv-python<4.6.0.66' \
+ --extra-index-url https://download.pytorch.org/whl/cu113
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+# Set environment variables
+ENV OMP_NUM_THREADS=8
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest && sudo docker build -f utils/docker/Dockerfile -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all $t
+
+# Pull and Run with local directory access
+# t=ultralytics/yolov5:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all -v "$(pwd)"/datasets:/usr/src/datasets $t
+
+# Kill all
+# sudo docker kill $(sudo docker ps -q)
+
+# Kill all image-based
+# sudo docker kill $(sudo docker ps -qa --filter ancestor=ultralytics/yolov5:latest)
+
+# Bash into running container
+# sudo docker exec -it 5a9b5863d93d bash
+
+# Bash into stopped container
+# id=$(sudo docker ps -qa) && sudo docker start $id && sudo docker exec -it $id bash
+
+# Clean up
+# docker system prune -a --volumes
+
+# Update Ubuntu drivers
+# https://www.maketecheasier.com/install-nvidia-drivers-ubuntu/
+
+# DDP test
+# python -m torch.distributed.run --nproc_per_node 2 --master_port 1 train.py --epochs 3
+
+# GCP VM from Image
+# docker.io/ultralytics/yolov5:latest
diff --git a/yolov7_seg/det/utils/docker/Dockerfile-arm64 b/yolov7_seg/det/utils/docker/Dockerfile-arm64
new file mode 100644
index 000000000..ebcf7ae0b
--- /dev/null
+++ b/yolov7_seg/det/utils/docker/Dockerfile-arm64
@@ -0,0 +1,42 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest-arm64 image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is aarch64-compatible for Apple M1 and other ARM architectures i.e. Jetson Nano and Raspberry Pi
+
+# Start FROM Ubuntu image https://hub.docker.com/_/ubuntu
+FROM arm64v8/ubuntu:20.04
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update
+RUN DEBIAN_FRONTEND=noninteractive TZ=Etc/UTC apt install -y tzdata
+RUN apt install --no-install-recommends -y python3-pip git zip curl htop gcc \
+ libgl1-mesa-glx libglib2.0-0 libpython3.8-dev
+# RUN alias python=python3
+
+# Install pip packages
+COPY requirements.txt .
+RUN python3 -m pip install --upgrade pip wheel
+RUN pip install --no-cache -r requirements.txt gsutil notebook \
+ tensorflow-aarch64
+ # tensorflowjs \
+ # onnx onnx-simplifier onnxruntime \
+ # coremltools openvino-dev \
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest-M1 && sudo docker build --platform linux/arm64 -f utils/docker/Dockerfile-arm64 -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest-M1 && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
diff --git a/yolov7_seg/det/utils/docker/Dockerfile-cpu b/yolov7_seg/det/utils/docker/Dockerfile-cpu
new file mode 100644
index 000000000..e7d4e43eb
--- /dev/null
+++ b/yolov7_seg/det/utils/docker/Dockerfile-cpu
@@ -0,0 +1,39 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest-cpu image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is CPU-optimized for ONNX, OpenVINO and PyTorch YOLOv5 deployments
+
+# Start FROM Ubuntu image https://hub.docker.com/_/ubuntu
+FROM ubuntu:20.04
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update
+RUN DEBIAN_FRONTEND=noninteractive TZ=Etc/UTC apt install -y tzdata
+RUN apt install --no-install-recommends -y python3-pip git zip curl htop libgl1-mesa-glx libglib2.0-0 libpython3.8-dev
+# RUN alias python=python3
+
+# Install pip packages
+COPY requirements.txt .
+RUN python3 -m pip install --upgrade pip wheel
+RUN pip install --no-cache -r requirements.txt albumentations gsutil notebook \
+ coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu tensorflowjs \
+ --extra-index-url https://download.pytorch.org/whl/cpu
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest-cpu && sudo docker build -f utils/docker/Dockerfile-cpu -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest-cpu && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
diff --git a/yolov7_seg/det/utils/downloads.py b/yolov7_seg/det/utils/downloads.py
new file mode 100644
index 000000000..c4c8f8bc2
--- /dev/null
+++ b/yolov7_seg/det/utils/downloads.py
@@ -0,0 +1,180 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Download utils
+"""
+
+import logging
+import os
+import platform
+import subprocess
+import time
+import urllib
+from pathlib import Path
+from zipfile import ZipFile
+
+import requests
+import torch
+
+
+def is_url(url, check_online=True):
+ # Check if online file exists
+ try:
+ url = str(url)
+ result = urllib.parse.urlparse(url)
+ assert all([result.scheme, result.netloc, result.path]) # check if is url
+ return (urllib.request.urlopen(url).getcode() == 200) if check_online else True # check if exists online
+ except (AssertionError, urllib.request.HTTPError):
+ return False
+
+
+def gsutil_getsize(url=''):
+ # gs://bucket/file size https://cloud.google.com/storage/docs/gsutil/commands/du
+ s = subprocess.check_output(f'gsutil du {url}', shell=True).decode('utf-8')
+ return eval(s.split(' ')[0]) if len(s) else 0 # bytes
+
+
+def safe_download(file, url, url2=None, min_bytes=1E0, error_msg=''):
+ # Attempts to download file from url or url2, checks and removes incomplete downloads < min_bytes
+ from utils.general import LOGGER
+
+ file = Path(file)
+ assert_msg = f"Downloaded file '{file}' does not exist or size is < min_bytes={min_bytes}"
+ try: # url1
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, str(file), progress=LOGGER.level <= logging.INFO)
+ assert file.exists() and file.stat().st_size > min_bytes, assert_msg # check
+ except Exception as e: # url2
+ file.unlink(missing_ok=True) # remove partial downloads
+ LOGGER.info(f'ERROR: {e}\nRe-attempting {url2 or url} to {file}...')
+ os.system(f"curl -L '{url2 or url}' -o '{file}' --retry 3 -C -") # curl download, retry and resume on fail
+ finally:
+ if not file.exists() or file.stat().st_size < min_bytes: # check
+ file.unlink(missing_ok=True) # remove partial downloads
+ LOGGER.info(f"ERROR: {assert_msg}\n{error_msg}")
+ LOGGER.info('')
+
+
+def attempt_download(file, repo='ultralytics/yolov5', release='v6.1'):
+ # Attempt file download from GitHub release assets if not found locally. release = 'latest', 'v6.1', etc.
+ from utils.general import LOGGER
+
+ def github_assets(repository, version='latest'):
+ # Return GitHub repo tag (i.e. 'v6.1') and assets (i.e. ['yolov5s.pt', 'yolov5m.pt', ...])
+ if version != 'latest':
+ version = f'tags/{version}' # i.e. tags/v6.1
+ response = requests.get(f'https://api.github.com/repos/{repository}/releases/{version}').json() # github api
+ return response['tag_name'], [x['name'] for x in response['assets']] # tag, assets
+
+ file = Path(str(file).strip().replace("'", ''))
+ if not file.exists():
+ # URL specified
+ name = Path(urllib.parse.unquote(str(file))).name # decode '%2F' to '/' etc.
+ if str(file).startswith(('http:/', 'https:/')): # download
+ url = str(file).replace(':/', '://') # Pathlib turns :// -> :/
+ file = name.split('?')[0] # parse authentication https://url.com/file.txt?auth...
+ if Path(file).is_file():
+ LOGGER.info(f'Found {url} locally at {file}') # file already exists
+ else:
+ safe_download(file=file, url=url, min_bytes=1E5)
+ return file
+
+ # GitHub assets
+ assets = [
+ 'yolov5n.pt', 'yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt', 'yolov5n6.pt', 'yolov5s6.pt',
+ 'yolov5m6.pt', 'yolov5l6.pt', 'yolov5x6.pt']
+ try:
+ tag, assets = github_assets(repo, release)
+ except Exception:
+ try:
+ tag, assets = github_assets(repo) # latest release
+ except Exception:
+ try:
+ tag = subprocess.check_output('git tag', shell=True, stderr=subprocess.STDOUT).decode().split()[-1]
+ except Exception:
+ tag = release
+
+ file.parent.mkdir(parents=True, exist_ok=True) # make parent dir (if required)
+ if name in assets:
+ url3 = 'https://drive.google.com/drive/folders/1EFQTEUeXWSFww0luse2jB9M1QNZQGwNl' # backup gdrive mirror
+ safe_download(
+ file,
+ url=f'https://github.com/{repo}/releases/download/{tag}/{name}',
+ url2=f'https://storage.googleapis.com/{repo}/{tag}/{name}', # backup url (optional)
+ min_bytes=1E5,
+ error_msg=f'{file} missing, try downloading from https://github.com/{repo}/releases/{tag} or {url3}')
+
+ return str(file)
+
+
+def gdrive_download(id='16TiPfZj7htmTyhntwcZyEEAejOUxuT6m', file='tmp.zip'):
+ # Downloads a file from Google Drive. from yolov5.utils.downloads import *; gdrive_download()
+ t = time.time()
+ file = Path(file)
+ cookie = Path('cookie') # gdrive cookie
+ print(f'Downloading https://drive.google.com/uc?export=download&id={id} as {file}... ', end='')
+ file.unlink(missing_ok=True) # remove existing file
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Attempt file download
+ out = "NUL" if platform.system() == "Windows" else "/dev/null"
+ os.system(f'curl -c ./cookie -s -L "drive.google.com/uc?export=download&id={id}" > {out}')
+ if os.path.exists('cookie'): # large file
+ s = f'curl -Lb ./cookie "drive.google.com/uc?export=download&confirm={get_token()}&id={id}" -o {file}'
+ else: # small file
+ s = f'curl -s -L -o {file} "drive.google.com/uc?export=download&id={id}"'
+ r = os.system(s) # execute, capture return
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Error check
+ if r != 0:
+ file.unlink(missing_ok=True) # remove partial
+ print('Download error ') # raise Exception('Download error')
+ return r
+
+ # Unzip if archive
+ if file.suffix == '.zip':
+ print('unzipping... ', end='')
+ ZipFile(file).extractall(path=file.parent) # unzip
+ file.unlink() # remove zip
+
+ print(f'Done ({time.time() - t:.1f}s)')
+ return r
+
+
+def get_token(cookie="./cookie"):
+ with open(cookie) as f:
+ for line in f:
+ if "download" in line:
+ return line.split()[-1]
+ return ""
+
+
+# Google utils: https://cloud.google.com/storage/docs/reference/libraries ----------------------------------------------
+#
+#
+# def upload_blob(bucket_name, source_file_name, destination_blob_name):
+# # Uploads a file to a bucket
+# # https://cloud.google.com/storage/docs/uploading-objects#storage-upload-object-python
+#
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(destination_blob_name)
+#
+# blob.upload_from_filename(source_file_name)
+#
+# print('File {} uploaded to {}.'.format(
+# source_file_name,
+# destination_blob_name))
+#
+#
+# def download_blob(bucket_name, source_blob_name, destination_file_name):
+# # Uploads a blob from a bucket
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(source_blob_name)
+#
+# blob.download_to_filename(destination_file_name)
+#
+# print('Blob {} downloaded to {}.'.format(
+# source_blob_name,
+# destination_file_name))
diff --git a/yolov7_seg/det/utils/flask_rest_api/README.md b/yolov7_seg/det/utils/flask_rest_api/README.md
new file mode 100644
index 000000000..9de4da470
--- /dev/null
+++ b/yolov7_seg/det/utils/flask_rest_api/README.md
@@ -0,0 +1,73 @@
+# Flask REST API
+
+[REST](https://en.wikipedia.org/wiki/Representational_state_transfer) [API](https://en.wikipedia.org/wiki/API)s are
+commonly used to expose Machine Learning (ML) models to other services. This folder contains an example REST API
+created using Flask to expose the YOLOv5s model from [PyTorch Hub](https://pytorch.org/hub/ultralytics_yolov5/).
+
+## Requirements
+
+[Flask](https://palletsprojects.com/p/flask/) is required. Install with:
+
+```shell
+$ pip install Flask
+```
+
+## Run
+
+After Flask installation run:
+
+```shell
+$ python3 restapi.py --port 5000
+```
+
+Then use [curl](https://curl.se/) to perform a request:
+
+```shell
+$ curl -X POST -F image=@zidane.jpg 'http://localhost:5000/v1/object-detection/yolov5s'
+```
+
+The model inference results are returned as a JSON response:
+
+```json
+[
+ {
+ "class": 0,
+ "confidence": 0.8900438547,
+ "height": 0.9318675399,
+ "name": "person",
+ "width": 0.3264600933,
+ "xcenter": 0.7438579798,
+ "ycenter": 0.5207948685
+ },
+ {
+ "class": 0,
+ "confidence": 0.8440024257,
+ "height": 0.7155083418,
+ "name": "person",
+ "width": 0.6546785235,
+ "xcenter": 0.427829951,
+ "ycenter": 0.6334488392
+ },
+ {
+ "class": 27,
+ "confidence": 0.3771208823,
+ "height": 0.3902671337,
+ "name": "tie",
+ "width": 0.0696444362,
+ "xcenter": 0.3675483763,
+ "ycenter": 0.7991207838
+ },
+ {
+ "class": 27,
+ "confidence": 0.3527112305,
+ "height": 0.1540903747,
+ "name": "tie",
+ "width": 0.0336618312,
+ "xcenter": 0.7814827561,
+ "ycenter": 0.5065554976
+ }
+]
+```
+
+An example python script to perform inference using [requests](https://docs.python-requests.org/en/master/) is given
+in `example_request.py`
diff --git a/yolov7_seg/det/utils/flask_rest_api/example_request.py b/yolov7_seg/det/utils/flask_rest_api/example_request.py
new file mode 100644
index 000000000..9c898143e
--- /dev/null
+++ b/yolov7_seg/det/utils/flask_rest_api/example_request.py
@@ -0,0 +1,19 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Perform test request
+"""
+
+import pprint
+
+import requests
+
+DETECTION_URL = "http://localhost:5000/v1/object-detection/yolov5s"
+IMAGE = "zidane.jpg"
+
+# Read image
+with open(IMAGE, "rb") as f:
+ image_data = f.read()
+
+response = requests.post(DETECTION_URL, files={"image": image_data}).json()
+
+pprint.pprint(response)
diff --git a/yolov7_seg/det/utils/flask_rest_api/restapi.py b/yolov7_seg/det/utils/flask_rest_api/restapi.py
new file mode 100644
index 000000000..2dbde45ce
--- /dev/null
+++ b/yolov7_seg/det/utils/flask_rest_api/restapi.py
@@ -0,0 +1,48 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run a Flask REST API exposing one or more YOLOv5s models
+"""
+
+import argparse
+import io
+
+import torch
+from flask import Flask, request
+from PIL import Image
+
+app = Flask(__name__)
+models = {}
+
+DETECTION_URL = "/v1/object-detection/"
+
+
+@app.route(DETECTION_URL, methods=["POST"])
+def predict(model):
+ if request.method != "POST":
+ return
+
+ if request.files.get("image"):
+ # Method 1
+ # with request.files["image"] as f:
+ # im = Image.open(io.BytesIO(f.read()))
+
+ # Method 2
+ im_file = request.files["image"]
+ im_bytes = im_file.read()
+ im = Image.open(io.BytesIO(im_bytes))
+
+ if model in models:
+ results = models[model](im, size=640) # reduce size=320 for faster inference
+ return results.pandas().xyxy[0].to_json(orient="records")
+
+
+if __name__ == "__main__":
+ parser = argparse.ArgumentParser(description="Flask API exposing YOLOv5 model")
+ parser.add_argument("--port", default=5000, type=int, help="port number")
+ parser.add_argument('--model', nargs='+', default=['yolov5s'], help='model(s) to run, i.e. --model yolov5n yolov5s')
+ opt = parser.parse_args()
+
+ for m in opt.model:
+ models[m] = torch.hub.load("ultralytics/yolov5", m, force_reload=True, skip_validation=True)
+
+ app.run(host="0.0.0.0", port=opt.port) # debug=True causes Restarting with stat
diff --git a/yolov7_seg/det/utils/general.py b/yolov7_seg/det/utils/general.py
new file mode 100644
index 000000000..a089b20b1
--- /dev/null
+++ b/yolov7_seg/det/utils/general.py
@@ -0,0 +1,1050 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+General utils
+"""
+
+import contextlib
+import glob
+import inspect
+import logging
+import math
+import os
+import platform
+import random
+import re
+import shutil
+import signal
+import sys
+import threading
+import time
+import urllib
+from datetime import datetime
+from itertools import repeat
+from multiprocessing.pool import ThreadPool
+from pathlib import Path
+from subprocess import check_output
+from typing import Optional
+from zipfile import ZipFile
+
+import cv2
+import numpy as np
+import pandas as pd
+import pkg_resources as pkg
+import torch
+import torchvision
+import yaml
+
+from utils.downloads import gsutil_getsize
+from utils.metrics import box_iou, fitness
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+RANK = int(os.getenv('RANK', -1))
+
+# Settings
+DATASETS_DIR = ROOT.parent / 'datasets' # YOLOv5 datasets directory
+NUM_THREADS = min(8, max(1, os.cpu_count() - 1)) # number of YOLOv5 multiprocessing threads
+AUTOINSTALL = str(os.getenv('YOLOv5_AUTOINSTALL', True)).lower() == 'true' # global auto-install mode
+VERBOSE = str(os.getenv('YOLOv5_VERBOSE', True)).lower() == 'true' # global verbose mode
+FONT = 'Arial.ttf' # https://ultralytics.com/assets/Arial.ttf
+
+torch.set_printoptions(linewidth=320, precision=5, profile='long')
+np.set_printoptions(linewidth=320, formatter={'float_kind': '{:11.5g}'.format}) # format short g, %precision=5
+pd.options.display.max_columns = 10
+cv2.setNumThreads(0) # prevent OpenCV from multithreading (incompatible with PyTorch DataLoader)
+os.environ['NUMEXPR_MAX_THREADS'] = str(NUM_THREADS) # NumExpr max threads
+os.environ['OMP_NUM_THREADS'] = '1' if platform.system() == 'darwin' else str(NUM_THREADS) # OpenMP (PyTorch and SciPy)
+
+
+def is_ascii(s=''):
+ # Is string composed of all ASCII (no UTF) characters? (note str().isascii() introduced in python 3.7)
+ s = str(s) # convert list, tuple, None, etc. to str
+ return len(s.encode().decode('ascii', 'ignore')) == len(s)
+
+
+def is_chinese(s='人工智能'):
+ # Is string composed of any Chinese characters?
+ return bool(re.search('[\u4e00-\u9fff]', str(s)))
+
+
+def is_colab():
+ # Is environment a Google Colab instance?
+ return 'COLAB_GPU' in os.environ
+
+
+def is_kaggle():
+ # Is environment a Kaggle Notebook?
+ return os.environ.get('PWD') == '/kaggle/working' and os.environ.get('KAGGLE_URL_BASE') == 'https://www.kaggle.com'
+
+
+def is_docker() -> bool:
+ """Check if the process runs inside a docker container."""
+ if Path("/.dockerenv").exists():
+ return True
+ try: # check if docker is in control groups
+ with open("/proc/self/cgroup") as file:
+ return any("docker" in line for line in file)
+ except OSError:
+ return False
+
+
+def is_writeable(dir, test=False):
+ # Return True if directory has write permissions, test opening a file with write permissions if test=True
+ if not test:
+ return os.access(dir, os.W_OK) # possible issues on Windows
+ file = Path(dir) / 'tmp.txt'
+ try:
+ with open(file, 'w'): # open file with write permissions
+ pass
+ file.unlink() # remove file
+ return True
+ except OSError:
+ return False
+
+
+def set_logging(name=None, verbose=VERBOSE):
+ # Sets level and returns logger
+ if is_kaggle() or is_colab():
+ for h in logging.root.handlers:
+ logging.root.removeHandler(h) # remove all handlers associated with the root logger object
+ rank = int(os.getenv('RANK', -1)) # rank in world for Multi-GPU trainings
+ level = logging.INFO if verbose and rank in {-1, 0} else logging.ERROR
+ log = logging.getLogger(name)
+ log.setLevel(level)
+ handler = logging.StreamHandler()
+ handler.setFormatter(logging.Formatter("%(message)s"))
+ handler.setLevel(level)
+ log.addHandler(handler)
+
+
+set_logging() # run before defining LOGGER
+LOGGER = logging.getLogger("yolov5") # define globally (used in train.py, val.py, detect.py, etc.)
+if platform.system() == 'Windows':
+ for fn in LOGGER.info, LOGGER.warning:
+ setattr(LOGGER, fn.__name__, lambda x: fn(emojis(x))) # emoji safe logging
+
+
+def user_config_dir(dir='Ultralytics', env_var='YOLOV5_CONFIG_DIR'):
+ # Return path of user configuration directory. Prefer environment variable if exists. Make dir if required.
+ env = os.getenv(env_var)
+ if env:
+ path = Path(env) # use environment variable
+ else:
+ cfg = {'Windows': 'AppData/Roaming', 'Linux': '.config', 'Darwin': 'Library/Application Support'} # 3 OS dirs
+ path = Path.home() / cfg.get(platform.system(), '') # OS-specific config dir
+ path = (path if is_writeable(path) else Path('/tmp')) / dir # GCP and AWS lambda fix, only /tmp is writeable
+ path.mkdir(exist_ok=True) # make if required
+ return path
+
+
+CONFIG_DIR = user_config_dir() # Ultralytics settings dir
+
+
+class Profile(contextlib.ContextDecorator):
+ # Usage: @Profile() decorator or 'with Profile():' context manager
+ def __enter__(self):
+ self.start = time.time()
+
+ def __exit__(self, type, value, traceback):
+ print(f'Profile results: {time.time() - self.start:.5f}s')
+
+
+class Timeout(contextlib.ContextDecorator):
+ # Usage: @Timeout(seconds) decorator or 'with Timeout(seconds):' context manager
+ def __init__(self, seconds, *, timeout_msg='', suppress_timeout_errors=True):
+ self.seconds = int(seconds)
+ self.timeout_message = timeout_msg
+ self.suppress = bool(suppress_timeout_errors)
+
+ def _timeout_handler(self, signum, frame):
+ raise TimeoutError(self.timeout_message)
+
+ def __enter__(self):
+ if platform.system() != 'Windows': # not supported on Windows
+ signal.signal(signal.SIGALRM, self._timeout_handler) # Set handler for SIGALRM
+ signal.alarm(self.seconds) # start countdown for SIGALRM to be raised
+
+ def __exit__(self, exc_type, exc_val, exc_tb):
+ if platform.system() != 'Windows':
+ signal.alarm(0) # Cancel SIGALRM if it's scheduled
+ if self.suppress and exc_type is TimeoutError: # Suppress TimeoutError
+ return True
+
+
+class WorkingDirectory(contextlib.ContextDecorator):
+ # Usage: @WorkingDirectory(dir) decorator or 'with WorkingDirectory(dir):' context manager
+ def __init__(self, new_dir):
+ self.dir = new_dir # new dir
+ self.cwd = Path.cwd().resolve() # current dir
+
+ def __enter__(self):
+ os.chdir(self.dir)
+
+ def __exit__(self, exc_type, exc_val, exc_tb):
+ os.chdir(self.cwd)
+
+
+def try_except(func):
+ # try-except function. Usage: @try_except decorator
+ def handler(*args, **kwargs):
+ try:
+ func(*args, **kwargs)
+ except Exception as e:
+ print(e)
+
+ return handler
+
+
+def threaded(func):
+ # Multi-threads a target function and returns thread. Usage: @threaded decorator
+ def wrapper(*args, **kwargs):
+ thread = threading.Thread(target=func, args=args, kwargs=kwargs, daemon=True)
+ thread.start()
+ return thread
+
+ return wrapper
+
+
+def methods(instance):
+ # Get class/instance methods
+ return [f for f in dir(instance) if callable(getattr(instance, f)) and not f.startswith("__")]
+
+
+def print_args(args: Optional[dict] = None, show_file=True, show_fcn=False):
+ # Print function arguments (optional args dict)
+ x = inspect.currentframe().f_back # previous frame
+ file, _, fcn, _, _ = inspect.getframeinfo(x)
+ if args is None: # get args automatically
+ args, _, _, frm = inspect.getargvalues(x)
+ args = {k: v for k, v in frm.items() if k in args}
+ try:
+ file = Path(file).resolve().relative_to(ROOT).with_suffix('')
+ except ValueError:
+ file = Path(file).stem
+ s = (f'{file}: ' if show_file else '') + (f'{fcn}: ' if show_fcn else '')
+ LOGGER.info(colorstr(s) + ', '.join(f'{k}={v}' for k, v in args.items()))
+
+
+def init_seeds(seed=0, deterministic=False):
+ # Initialize random number generator (RNG) seeds https://pytorch.org/docs/stable/notes/randomness.html
+ # cudnn seed 0 settings are slower and more reproducible, else faster and less reproducible
+ import torch.backends.cudnn as cudnn
+
+ if deterministic and check_version(torch.__version__, '1.12.0'): # https://github.com/ultralytics/yolov5/pull/8213
+ torch.use_deterministic_algorithms(True)
+ os.environ['CUBLAS_WORKSPACE_CONFIG'] = ':4096:8'
+ os.environ['PYTHONHASHSEED'] = str(seed)
+
+ random.seed(seed)
+ np.random.seed(seed)
+ torch.manual_seed(seed)
+ cudnn.benchmark, cudnn.deterministic = (False, True) if seed == 0 else (True, False)
+ torch.cuda.manual_seed(seed)
+ torch.cuda.manual_seed_all(seed) # for Multi-GPU, exception safe
+
+
+def intersect_dicts(da, db, exclude=()):
+ # Dictionary intersection of matching keys and shapes, omitting 'exclude' keys, using da values
+ return {k: v for k, v in da.items() if k in db and not any(x in k for x in exclude) and v.shape == db[k].shape}
+
+
+def get_latest_run(search_dir='.'):
+ # Return path to most recent 'last.pt' in /runs (i.e. to --resume from)
+ last_list = glob.glob(f'{search_dir}/**/last*.pt', recursive=True)
+ return max(last_list, key=os.path.getctime) if last_list else ''
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+def file_age(path=__file__):
+ # Return days since last file update
+ dt = (datetime.now() - datetime.fromtimestamp(Path(path).stat().st_mtime)) # delta
+ return dt.days # + dt.seconds / 86400 # fractional days
+
+
+def file_date(path=__file__):
+ # Return human-readable file modification date, i.e. '2021-3-26'
+ t = datetime.fromtimestamp(Path(path).stat().st_mtime)
+ return f'{t.year}-{t.month}-{t.day}'
+
+
+def file_size(path):
+ # Return file/dir size (MB)
+ mb = 1 << 20 # bytes to MiB (1024 ** 2)
+ path = Path(path)
+ if path.is_file():
+ return path.stat().st_size / mb
+ elif path.is_dir():
+ return sum(f.stat().st_size for f in path.glob('**/*') if f.is_file()) / mb
+ else:
+ return 0.0
+
+
+def check_online():
+ # Check internet connectivity
+ import socket
+ try:
+ socket.create_connection(("1.1.1.1", 443), 5) # check host accessibility
+ return True
+ except OSError:
+ return False
+
+
+def git_describe(path=ROOT): # path must be a directory
+ # Return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
+ try:
+ assert (Path(path) / '.git').is_dir()
+ return check_output(f'git -C {path} describe --tags --long --always', shell=True).decode()[:-1]
+ except Exception:
+ return ''
+
+
+@try_except
+@WorkingDirectory(ROOT)
+def check_git_status(repo='ultralytics/yolov5'):
+ # YOLOv5 status check, recommend 'git pull' if code is out of date
+ url = f'https://github.com/{repo}'
+ msg = f', for updates see {url}'
+ s = colorstr('github: ') # string
+ assert Path('.git').exists(), s + 'skipping check (not a git repository)' + msg
+ assert check_online(), s + 'skipping check (offline)' + msg
+
+ splits = re.split(pattern=r'\s', string=check_output('git remote -v', shell=True).decode())
+ matches = [repo in s for s in splits]
+ if any(matches):
+ remote = splits[matches.index(True) - 1]
+ else:
+ remote = 'ultralytics'
+ check_output(f'git remote add {remote} {url}', shell=True)
+ check_output(f'git fetch {remote}', shell=True, timeout=5) # git fetch
+ branch = check_output('git rev-parse --abbrev-ref HEAD', shell=True).decode().strip() # checked out
+ n = int(check_output(f'git rev-list {branch}..{remote}/master --count', shell=True)) # commits behind
+ if n > 0:
+ pull = 'git pull' if remote == 'origin' else f'git pull {remote} master'
+ s += f"⚠️ YOLOv5 is out of date by {n} commit{'s' * (n > 1)}. Use `{pull}` or `git clone {url}` to update."
+ else:
+ s += f'up to date with {url} ✅'
+ LOGGER.info(s)
+
+
+def check_python(minimum='3.7.0'):
+ # Check current python version vs. required python version
+ check_version(platform.python_version(), minimum, name='Python ', hard=True)
+
+
+def check_version(current='0.0.0', minimum='0.0.0', name='version ', pinned=False, hard=False, verbose=False):
+ # Check version vs. required version
+ current, minimum = (pkg.parse_version(x) for x in (current, minimum))
+ result = (current == minimum) if pinned else (current >= minimum) # bool
+ s = f'{name}{minimum} required by YOLOv5, but {name}{current} is currently installed' # string
+ if hard:
+ assert result, s # assert min requirements met
+ if verbose and not result:
+ LOGGER.warning(s)
+ return result
+
+
+@try_except
+def check_requirements(requirements=ROOT / 'requirements.txt', exclude=(), install=True, cmds=()):
+ # Check installed dependencies meet YOLOv5 requirements (pass *.txt file or list of packages)
+ prefix = colorstr('red', 'bold', 'requirements:')
+ check_python() # check python version
+ if isinstance(requirements, (str, Path)): # requirements.txt file
+ file = Path(requirements)
+ assert file.exists(), f"{prefix} {file.resolve()} not found, check failed."
+ with file.open() as f:
+ requirements = [f'{x.name}{x.specifier}' for x in pkg.parse_requirements(f) if x.name not in exclude]
+ else: # list or tuple of packages
+ requirements = [x for x in requirements if x not in exclude]
+
+ n = 0 # number of packages updates
+ for i, r in enumerate(requirements):
+ try:
+ pkg.require(r)
+ except Exception: # DistributionNotFound or VersionConflict if requirements not met
+ s = f"{prefix} {r} not found and is required by YOLOv5"
+ if install and AUTOINSTALL: # check environment variable
+ LOGGER.info(f"{s}, attempting auto-update...")
+ try:
+ assert check_online(), f"'pip install {r}' skipped (offline)"
+ LOGGER.info(check_output(f'pip install "{r}" {cmds[i] if cmds else ""}', shell=True).decode())
+ n += 1
+ except Exception as e:
+ LOGGER.warning(f'{prefix} {e}')
+ else:
+ LOGGER.info(f'{s}. Please install and rerun your command.')
+
+ if n: # if packages updated
+ source = file.resolve() if 'file' in locals() else requirements
+ s = f"{prefix} {n} package{'s' * (n > 1)} updated per {source}\n" \
+ f"{prefix} ⚠️ {colorstr('bold', 'Restart runtime or rerun command for updates to take effect')}\n"
+ LOGGER.info(s)
+
+
+def check_img_size(imgsz, s=32, floor=0):
+ # Verify image size is a multiple of stride s in each dimension
+ if isinstance(imgsz, int): # integer i.e. img_size=640
+ new_size = max(make_divisible(imgsz, int(s)), floor)
+ else: # list i.e. img_size=[640, 480]
+ imgsz = list(imgsz) # convert to list if tuple
+ new_size = [max(make_divisible(x, int(s)), floor) for x in imgsz]
+ if new_size != imgsz:
+ LOGGER.warning(f'WARNING: --img-size {imgsz} must be multiple of max stride {s}, updating to {new_size}')
+ return new_size
+
+
+def check_imshow():
+ # Check if environment supports image displays
+ try:
+ assert not is_docker(), 'cv2.imshow() is disabled in Docker environments'
+ assert not is_colab(), 'cv2.imshow() is disabled in Google Colab environments'
+ cv2.imshow('test', np.zeros((1, 1, 3)))
+ cv2.waitKey(1)
+ cv2.destroyAllWindows()
+ cv2.waitKey(1)
+ return True
+ except Exception as e:
+ LOGGER.warning(f'WARNING: Environment does not support cv2.imshow() or PIL Image.show() image displays\n{e}')
+ return False
+
+
+def check_suffix(file='yolov5s.pt', suffix=('.pt',), msg=''):
+ # Check file(s) for acceptable suffix
+ if file and suffix:
+ if isinstance(suffix, str):
+ suffix = [suffix]
+ for f in file if isinstance(file, (list, tuple)) else [file]:
+ s = Path(f).suffix.lower() # file suffix
+ if len(s):
+ assert s in suffix, f"{msg}{f} acceptable suffix is {suffix}"
+
+
+def check_yaml(file, suffix=('.yaml', '.yml')):
+ # Search/download YAML file (if necessary) and return path, checking suffix
+ return check_file(file, suffix)
+
+
+def check_file(file, suffix=''):
+ # Search/download file (if necessary) and return path
+ check_suffix(file, suffix) # optional
+ file = str(file) # convert to str()
+ if Path(file).is_file() or not file: # exists
+ return file
+ elif file.startswith(('http:/', 'https:/')): # download
+ url = file # warning: Pathlib turns :// -> :/
+ file = Path(urllib.parse.unquote(file).split('?')[0]).name # '%2F' to '/', split https://url.com/file.txt?auth
+ if Path(file).is_file():
+ LOGGER.info(f'Found {url} locally at {file}') # file already exists
+ else:
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, file)
+ assert Path(file).exists() and Path(file).stat().st_size > 0, f'File download failed: {url}' # check
+ return file
+ elif file.startswith('clearml://'): # ClearML Dataset ID
+ assert 'clearml' in sys.modules, "ClearML is not installed, so cannot use ClearML dataset. Try running 'pip install clearml'."
+ return file
+ else: # search
+ files = []
+ for d in 'data', 'models', 'utils': # search directories
+ files.extend(glob.glob(str(ROOT / d / '**' / file), recursive=True)) # find file
+ assert len(files), f'File not found: {file}' # assert file was found
+ assert len(files) == 1, f"Multiple files match '{file}', specify exact path: {files}" # assert unique
+ return files[0] # return file
+
+
+def check_font(font=FONT, progress=False):
+ # Download font to CONFIG_DIR if necessary
+ font = Path(font)
+ file = CONFIG_DIR / font.name
+ if not font.exists() and not file.exists():
+ url = "https://ultralytics.com/assets/" + font.name
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, str(file), progress=progress)
+
+
+def check_dataset(data, autodownload=True):
+ # Download, check and/or unzip dataset if not found locally
+
+ # Download (optional)
+ extract_dir = ''
+ if isinstance(data, (str, Path)) and str(data).endswith('.zip'): # i.e. gs://bucket/dir/coco128.zip
+ download(data, dir=f'{DATASETS_DIR}/{Path(data).stem}', unzip=True, delete=False, curl=False, threads=1)
+ data = next((DATASETS_DIR / Path(data).stem).rglob('*.yaml'))
+ extract_dir, autodownload = data.parent, False
+
+ # Read yaml (optional)
+ if isinstance(data, (str, Path)):
+ with open(data, errors='ignore') as f:
+ data = yaml.safe_load(f) # dictionary
+
+ # Checks
+ for k in 'train', 'val', 'nc':
+ assert k in data, f"data.yaml '{k}:' field missing ❌"
+ if 'names' not in data:
+ LOGGER.warning("data.yaml 'names:' field missing ⚠️, assigning default names 'class0', 'class1', etc.")
+ data['names'] = [f'class{i}' for i in range(data['nc'])] # default names
+
+ # Resolve paths
+ path = Path(extract_dir or data.get('path') or '') # optional 'path' default to '.'
+ if not path.is_absolute():
+ path = (ROOT / path).resolve()
+ for k in 'train', 'val', 'test':
+ if data.get(k): # prepend path
+ data[k] = str(path / data[k]) if isinstance(data[k], str) else [str(path / x) for x in data[k]]
+
+ # Parse yaml
+ train, val, test, s = (data.get(x) for x in ('train', 'val', 'test', 'download'))
+ if val:
+ val = [Path(x).resolve() for x in (val if isinstance(val, list) else [val])] # val path
+ if not all(x.exists() for x in val):
+ LOGGER.info('\nDataset not found ⚠️, missing paths %s' % [str(x) for x in val if not x.exists()])
+ if not s or not autodownload:
+ raise Exception('Dataset not found ❌')
+ t = time.time()
+ root = path.parent if 'path' in data else '..' # unzip directory i.e. '../'
+ if s.startswith('http') and s.endswith('.zip'): # URL
+ f = Path(s).name # filename
+ LOGGER.info(f'Downloading {s} to {f}...')
+ torch.hub.download_url_to_file(s, f)
+ Path(root).mkdir(parents=True, exist_ok=True) # create root
+ ZipFile(f).extractall(path=root) # unzip
+ Path(f).unlink() # remove zip
+ r = None # success
+ elif s.startswith('bash '): # bash script
+ LOGGER.info(f'Running {s} ...')
+ r = os.system(s)
+ else: # python script
+ r = exec(s, {'yaml': data}) # return None
+ dt = f'({round(time.time() - t, 1)}s)'
+ s = f"success ✅ {dt}, saved to {colorstr('bold', root)}" if r in (0, None) else f"failure {dt} ❌"
+ LOGGER.info(f"Dataset download {s}")
+ check_font('Arial.ttf' if is_ascii(data['names']) else 'Arial.Unicode.ttf', progress=True) # download fonts
+ return data # dictionary
+
+
+def check_amp(model):
+ # Check PyTorch Automatic Mixed Precision (AMP) functionality. Return True on correct operation
+ from models.common import AutoShape, DetectMultiBackend
+
+ def amp_allclose(model, im):
+ # All close FP32 vs AMP results
+ m = AutoShape(model, verbose=False) # model
+ a = m(im).xywhn[0] # FP32 inference
+ m.amp = True
+ b = m(im).xywhn[0] # AMP inference
+ return a.shape == b.shape and torch.allclose(a, b, atol=0.1) # close to 10% absolute tolerance
+
+ prefix = colorstr('AMP: ')
+ device = next(model.parameters()).device # get model device
+ if device.type == 'cpu':
+ return False # AMP disabled on CPU
+ f = ROOT / 'data' / 'images' / 'bus.jpg' # image to check
+ im = f if f.exists() else 'https://ultralytics.com/images/bus.jpg' if check_online() else np.ones((640, 640, 3))
+ try:
+ assert amp_allclose(model, im) or amp_allclose(DetectMultiBackend('yolov5n.pt', device), im)
+ LOGGER.info(f'{prefix}checks passed ✅')
+ return True
+ except Exception:
+ help_url = 'https://github.com/ultralytics/yolov5/issues/7908'
+ LOGGER.warning(f'{prefix}checks failed ❌, disabling Automatic Mixed Precision. See {help_url}')
+ return False
+
+
+def yaml_load(file='data.yaml'):
+ # Single-line safe yaml loading
+ with open(file, errors='ignore') as f:
+ return yaml.safe_load(f)
+
+
+def yaml_save(file='data.yaml', data={}):
+ # Single-line safe yaml saving
+ with open(file, 'w') as f:
+ yaml.safe_dump({k: str(v) if isinstance(v, Path) else v for k, v in data.items()}, f, sort_keys=False)
+
+
+def url2file(url):
+ # Convert URL to filename, i.e. https://url.com/file.txt?auth -> file.txt
+ url = str(Path(url)).replace(':/', '://') # Pathlib turns :// -> :/
+ return Path(urllib.parse.unquote(url)).name.split('?')[0] # '%2F' to '/', split https://url.com/file.txt?auth
+
+
+def download(url, dir='.', unzip=True, delete=True, curl=False, threads=1, retry=3):
+ # Multi-threaded file download and unzip function, used in data.yaml for autodownload
+ def download_one(url, dir):
+ # Download 1 file
+ success = True
+ f = dir / Path(url).name # filename
+ if Path(url).is_file(): # exists in current path
+ Path(url).rename(f) # move to dir
+ elif not f.exists():
+ LOGGER.info(f'Downloading {url} to {f}...')
+ for i in range(retry + 1):
+ if curl:
+ s = 'sS' if threads > 1 else '' # silent
+ r = os.system(f'curl -{s}L "{url}" -o "{f}" --retry 9 -C -') # curl download with retry, continue
+ success = r == 0
+ else:
+ torch.hub.download_url_to_file(url, f, progress=threads == 1) # torch download
+ success = f.is_file()
+ if success:
+ break
+ elif i < retry:
+ LOGGER.warning(f'Download failure, retrying {i + 1}/{retry} {url}...')
+ else:
+ LOGGER.warning(f'Failed to download {url}...')
+
+ if unzip and success and f.suffix in ('.zip', '.tar', '.gz'):
+ LOGGER.info(f'Unzipping {f}...')
+ if f.suffix == '.zip':
+ ZipFile(f).extractall(path=dir) # unzip
+ elif f.suffix == '.tar':
+ os.system(f'tar xf {f} --directory {f.parent}') # unzip
+ elif f.suffix == '.gz':
+ os.system(f'tar xfz {f} --directory {f.parent}') # unzip
+ if delete:
+ f.unlink() # remove zip
+
+ dir = Path(dir)
+ dir.mkdir(parents=True, exist_ok=True) # make directory
+ if threads > 1:
+ pool = ThreadPool(threads)
+ pool.imap(lambda x: download_one(*x), zip(url, repeat(dir))) # multi-threaded
+ pool.close()
+ pool.join()
+ else:
+ for u in [url] if isinstance(url, (str, Path)) else url:
+ download_one(u, dir)
+
+
+def make_divisible(x, divisor):
+ # Returns nearest x divisible by divisor
+ if isinstance(divisor, torch.Tensor):
+ divisor = int(divisor.max()) # to int
+ return math.ceil(x / divisor) * divisor
+
+
+def clean_str(s):
+ # Cleans a string by replacing special characters with underscore _
+ return re.sub(pattern="[|@#!¡·$€%&()=?¿^*;:,¨´><+]", repl="_", string=s)
+
+
+def one_cycle(y1=0.0, y2=1.0, steps=100):
+ # lambda function for sinusoidal ramp from y1 to y2 https://arxiv.org/pdf/1812.01187.pdf
+ return lambda x: ((1 - math.cos(x * math.pi / steps)) / 2) * (y2 - y1) + y1
+
+
+def colorstr(*input):
+ # Colors a string https://en.wikipedia.org/wiki/ANSI_escape_code, i.e. colorstr('blue', 'hello world')
+ *args, string = input if len(input) > 1 else ('blue', 'bold', input[0]) # color arguments, string
+ colors = {
+ 'black': '\033[30m', # basic colors
+ 'red': '\033[31m',
+ 'green': '\033[32m',
+ 'yellow': '\033[33m',
+ 'blue': '\033[34m',
+ 'magenta': '\033[35m',
+ 'cyan': '\033[36m',
+ 'white': '\033[37m',
+ 'bright_black': '\033[90m', # bright colors
+ 'bright_red': '\033[91m',
+ 'bright_green': '\033[92m',
+ 'bright_yellow': '\033[93m',
+ 'bright_blue': '\033[94m',
+ 'bright_magenta': '\033[95m',
+ 'bright_cyan': '\033[96m',
+ 'bright_white': '\033[97m',
+ 'end': '\033[0m', # misc
+ 'bold': '\033[1m',
+ 'underline': '\033[4m'}
+ return ''.join(colors[x] for x in args) + f'{string}' + colors['end']
+
+
+def labels_to_class_weights(labels, nc=80):
+ # Get class weights (inverse frequency) from training labels
+ if labels[0] is None: # no labels loaded
+ return torch.Tensor()
+
+ labels = np.concatenate(labels, 0) # labels.shape = (866643, 5) for COCO
+ classes = labels[:, 0].astype(int) # labels = [class xywh]
+ weights = np.bincount(classes, minlength=nc) # occurrences per class
+
+ # Prepend gridpoint count (for uCE training)
+ # gpi = ((320 / 32 * np.array([1, 2, 4])) ** 2 * 3).sum() # gridpoints per image
+ # weights = np.hstack([gpi * len(labels) - weights.sum() * 9, weights * 9]) ** 0.5 # prepend gridpoints to start
+
+ weights[weights == 0] = 1 # replace empty bins with 1
+ weights = 1 / weights # number of targets per class
+ weights /= weights.sum() # normalize
+ return torch.from_numpy(weights).float()
+
+
+def labels_to_image_weights(labels, nc=80, class_weights=np.ones(80)):
+ # Produces image weights based on class_weights and image contents
+ # Usage: index = random.choices(range(n), weights=image_weights, k=1) # weighted image sample
+ class_counts = np.array([np.bincount(x[:, 0].astype(int), minlength=nc) for x in labels])
+ return (class_weights.reshape(1, nc) * class_counts).sum(1)
+
+
+def coco80_to_coco91_class(): # converts 80-index (val2014) to 91-index (paper)
+ # https://tech.amikelive.com/node-718/what-object-categories-labels-are-in-coco-dataset/
+ # a = np.loadtxt('data/coco.names', dtype='str', delimiter='\n')
+ # b = np.loadtxt('data/coco_paper.names', dtype='str', delimiter='\n')
+ # x1 = [list(a[i] == b).index(True) + 1 for i in range(80)] # darknet to coco
+ # x2 = [list(b[i] == a).index(True) if any(b[i] == a) else None for i in range(91)] # coco to darknet
+ return [
+ 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 27, 28, 31, 32, 33, 34,
+ 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63,
+ 64, 65, 67, 70, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 84, 85, 86, 87, 88, 89, 90]
+
+
+def xyxy2xywh(x):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = (x[:, 0] + x[:, 2]) / 2 # x center
+ y[:, 1] = (x[:, 1] + x[:, 3]) / 2 # y center
+ y[:, 2] = x[:, 2] - x[:, 0] # width
+ y[:, 3] = x[:, 3] - x[:, 1] # height
+ return y
+
+
+def xywh2xyxy(x):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
+ y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
+ y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
+ y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
+ return y
+
+
+def xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):
+ # Convert nx4 boxes from [x, y, w, h] normalized to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * (x[:, 0] - x[:, 2] / 2) + padw # top left x
+ y[:, 1] = h * (x[:, 1] - x[:, 3] / 2) + padh # top left y
+ y[:, 2] = w * (x[:, 0] + x[:, 2] / 2) + padw # bottom right x
+ y[:, 3] = h * (x[:, 1] + x[:, 3] / 2) + padh # bottom right y
+ return y
+
+
+def xyxy2xywhn(x, w=640, h=640, clip=False, eps=0.0):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] normalized where xy1=top-left, xy2=bottom-right
+ if clip:
+ clip_coords(x, (h - eps, w - eps)) # warning: inplace clip
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = ((x[:, 0] + x[:, 2]) / 2) / w # x center
+ y[:, 1] = ((x[:, 1] + x[:, 3]) / 2) / h # y center
+ y[:, 2] = (x[:, 2] - x[:, 0]) / w # width
+ y[:, 3] = (x[:, 3] - x[:, 1]) / h # height
+ return y
+
+
+def xyn2xy(x, w=640, h=640, padw=0, padh=0):
+ # Convert normalized segments into pixel segments, shape (n,2)
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * x[:, 0] + padw # top left x
+ y[:, 1] = h * x[:, 1] + padh # top left y
+ return y
+
+
+def segment2box(segment, width=640, height=640):
+ # Convert 1 segment label to 1 box label, applying inside-image constraint, i.e. (xy1, xy2, ...) to (xyxy)
+ x, y = segment.T # segment xy
+ inside = (x >= 0) & (y >= 0) & (x <= width) & (y <= height)
+ x, y, = x[inside], y[inside]
+ return np.array([x.min(), y.min(), x.max(), y.max()]) if any(x) else np.zeros((1, 4)) # xyxy
+
+
+def segments2boxes(segments):
+ # Convert segment labels to box labels, i.e. (cls, xy1, xy2, ...) to (cls, xywh)
+ boxes = []
+ for s in segments:
+ x, y = s.T # segment xy
+ boxes.append([x.min(), y.min(), x.max(), y.max()]) # cls, xyxy
+ return xyxy2xywh(np.array(boxes)) # cls, xywh
+
+
+def resample_segments(segments, n=1000):
+ # Up-sample an (n,2) segment
+ for i, s in enumerate(segments):
+ s = np.concatenate((s, s[0:1, :]), axis=0)
+ x = np.linspace(0, len(s) - 1, n)
+ xp = np.arange(len(s))
+ segments[i] = np.concatenate([np.interp(x, xp, s[:, i]) for i in range(2)]).reshape(2, -1).T # segment xy
+ return segments
+
+
+def scale_coords(img1_shape, coords, img0_shape, ratio_pad=None):
+ # Rescale coords (xyxy) from img1_shape to img0_shape
+ if ratio_pad is None: # calculate from img0_shape
+ gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
+ pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
+ else:
+ gain = ratio_pad[0][0]
+ pad = ratio_pad[1]
+
+ coords[:, [0, 2]] -= pad[0] # x padding
+ coords[:, [1, 3]] -= pad[1] # y padding
+ coords[:, :4] /= gain
+ clip_coords(coords, img0_shape)
+ return coords
+
+
+def clip_coords(boxes, shape):
+ # Clip bounding xyxy bounding boxes to image shape (height, width)
+ if isinstance(boxes, torch.Tensor): # faster individually
+ boxes[:, 0].clamp_(0, shape[1]) # x1
+ boxes[:, 1].clamp_(0, shape[0]) # y1
+ boxes[:, 2].clamp_(0, shape[1]) # x2
+ boxes[:, 3].clamp_(0, shape[0]) # y2
+ else: # np.array (faster grouped)
+ boxes[:, [0, 2]] = boxes[:, [0, 2]].clip(0, shape[1]) # x1, x2
+ boxes[:, [1, 3]] = boxes[:, [1, 3]].clip(0, shape[0]) # y1, y2
+
+
+def non_max_suppression(prediction,
+ conf_thres=0.25,
+ iou_thres=0.45,
+ classes=None,
+ agnostic=False,
+ multi_label=False,
+ labels=(),
+ max_det=300):
+ """Non-Maximum Suppression (NMS) on inference results to reject overlapping bounding boxes
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+
+ bs = prediction.shape[0] # batch size
+ nc = prediction.shape[2] - 5 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Checks
+ assert 0 <= conf_thres <= 1, f'Invalid Confidence threshold {conf_thres}, valid values are between 0.0 and 1.0'
+ assert 0 <= iou_thres <= 1, f'Invalid IoU {iou_thres}, valid values are between 0.0 and 1.0'
+
+ # Settings
+ # min_wh = 2 # (pixels) minimum box width and height
+ max_wh = 7680 # (pixels) maximum box width and height
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 0.3 + 0.03 * bs # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ output = [torch.zeros((0, 6), device=prediction.device)] * bs
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ lb = labels[xi]
+ v = torch.zeros((len(lb), nc + 5), device=x.device)
+ v[:, :4] = lb[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(lb)), lb[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box (center x, center y, width, height) to (x1, y1, x2, y2)
+ box = xywh2xyxy(x[:, :4])
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
+ else: # best class only
+ conf, j = x[:, 5:].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ LOGGER.warning(f'WARNING: NMS time limit {time_limit:.3f}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def strip_optimizer(f='best.pt', s=''): # from utils.general import *; strip_optimizer()
+ # Strip optimizer from 'f' to finalize training, optionally save as 's'
+ x = torch.load(f, map_location=torch.device('cpu'))
+ if x.get('ema'):
+ x['model'] = x['ema'] # replace model with ema
+ for k in 'optimizer', 'best_fitness', 'wandb_id', 'ema', 'updates': # keys
+ x[k] = None
+ x['epoch'] = -1
+ x['model'].half() # to FP16
+ for p in x['model'].parameters():
+ p.requires_grad = False
+ torch.save(x, s or f)
+ mb = os.path.getsize(s or f) / 1E6 # filesize
+ LOGGER.info(f"Optimizer stripped from {f},{f' saved as {s},' if s else ''} {mb:.1f}MB")
+
+
+def print_mutation(results, hyp, save_dir, bucket, prefix=colorstr('evolve: ')):
+ evolve_csv = save_dir / 'evolve.csv'
+ evolve_yaml = save_dir / 'hyp_evolve.yaml'
+ keys = ('metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/mAP_0.5:0.95', 'val/box_loss',
+ 'val/obj_loss', 'val/cls_loss') + tuple(hyp.keys()) # [results + hyps]
+ keys = tuple(x.strip() for x in keys)
+ vals = results + tuple(hyp.values())
+ n = len(keys)
+
+ # Download (optional)
+ if bucket:
+ url = f'gs://{bucket}/evolve.csv'
+ if gsutil_getsize(url) > (evolve_csv.stat().st_size if evolve_csv.exists() else 0):
+ os.system(f'gsutil cp {url} {save_dir}') # download evolve.csv if larger than local
+
+ # Log to evolve.csv
+ s = '' if evolve_csv.exists() else (('%20s,' * n % keys).rstrip(',') + '\n') # add header
+ with open(evolve_csv, 'a') as f:
+ f.write(s + ('%20.5g,' * n % vals).rstrip(',') + '\n')
+
+ # Save yaml
+ with open(evolve_yaml, 'w') as f:
+ data = pd.read_csv(evolve_csv)
+ data = data.rename(columns=lambda x: x.strip()) # strip keys
+ i = np.argmax(fitness(data.values[:, :4])) #
+ generations = len(data)
+ f.write('# YOLOv5 Hyperparameter Evolution Results\n' + f'# Best generation: {i}\n' +
+ f'# Last generation: {generations - 1}\n' + '# ' + ', '.join(f'{x.strip():>20s}' for x in keys[:7]) +
+ '\n' + '# ' + ', '.join(f'{x:>20.5g}' for x in data.values[i, :7]) + '\n\n')
+ yaml.safe_dump(data.loc[i][7:].to_dict(), f, sort_keys=False)
+
+ # Print to screen
+ LOGGER.info(prefix + f'{generations} generations finished, current result:\n' + prefix +
+ ', '.join(f'{x.strip():>20s}' for x in keys) + '\n' + prefix + ', '.join(f'{x:20.5g}'
+ for x in vals) + '\n\n')
+
+ if bucket:
+ os.system(f'gsutil cp {evolve_csv} {evolve_yaml} gs://{bucket}') # upload
+
+
+def apply_classifier(x, model, img, im0):
+ # Apply a second stage classifier to YOLO outputs
+ # Example model = torchvision.models.__dict__['efficientnet_b0'](pretrained=True).to(device).eval()
+ im0 = [im0] if isinstance(im0, np.ndarray) else im0
+ for i, d in enumerate(x): # per image
+ if d is not None and len(d):
+ d = d.clone()
+
+ # Reshape and pad cutouts
+ b = xyxy2xywh(d[:, :4]) # boxes
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # rectangle to square
+ b[:, 2:] = b[:, 2:] * 1.3 + 30 # pad
+ d[:, :4] = xywh2xyxy(b).long()
+
+ # Rescale boxes from img_size to im0 size
+ scale_coords(img.shape[2:], d[:, :4], im0[i].shape)
+
+ # Classes
+ pred_cls1 = d[:, 5].long()
+ ims = []
+ for a in d:
+ cutout = im0[i][int(a[1]):int(a[3]), int(a[0]):int(a[2])]
+ im = cv2.resize(cutout, (224, 224)) # BGR
+
+ im = im[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ im = np.ascontiguousarray(im, dtype=np.float32) # uint8 to float32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ ims.append(im)
+
+ pred_cls2 = model(torch.Tensor(ims).to(d.device)).argmax(1) # classifier prediction
+ x[i] = x[i][pred_cls1 == pred_cls2] # retain matching class detections
+
+ return x
+
+
+def increment_path(path, exist_ok=False, sep='', mkdir=False):
+ # Increment file or directory path, i.e. runs/exp --> runs/exp{sep}2, runs/exp{sep}3, ... etc.
+ path = Path(path) # os-agnostic
+ if path.exists() and not exist_ok:
+ path, suffix = (path.with_suffix(''), path.suffix) if path.is_file() else (path, '')
+
+ # Method 1
+ for n in range(2, 9999):
+ p = f'{path}{sep}{n}{suffix}' # increment path
+ if not os.path.exists(p): #
+ break
+ path = Path(p)
+
+ # Method 2 (deprecated)
+ # dirs = glob.glob(f"{path}{sep}*") # similar paths
+ # matches = [re.search(rf"{path.stem}{sep}(\d+)", d) for d in dirs]
+ # i = [int(m.groups()[0]) for m in matches if m] # indices
+ # n = max(i) + 1 if i else 2 # increment number
+ # path = Path(f"{path}{sep}{n}{suffix}") # increment path
+
+ if mkdir:
+ path.mkdir(parents=True, exist_ok=True) # make directory
+
+ return path
+
+
+# OpenCV Chinese-friendly functions ------------------------------------------------------------------------------------
+imshow_ = cv2.imshow # copy to avoid recursion errors
+
+
+def imread(path, flags=cv2.IMREAD_COLOR):
+ return cv2.imdecode(np.fromfile(path, np.uint8), flags)
+
+
+def imwrite(path, im):
+ try:
+ cv2.imencode(Path(path).suffix, im)[1].tofile(path)
+ return True
+ except Exception:
+ return False
+
+
+def imshow(path, im):
+ imshow_(path.encode('unicode_escape').decode(), im)
+
+
+cv2.imread, cv2.imwrite, cv2.imshow = imread, imwrite, imshow # redefine
+
+# Variables ------------------------------------------------------------------------------------------------------------
+NCOLS = 0 if is_docker() else shutil.get_terminal_size().columns # terminal window size for tqdm
diff --git a/yolov7_seg/det/utils/google_app_engine/Dockerfile b/yolov7_seg/det/utils/google_app_engine/Dockerfile
new file mode 100644
index 000000000..d889610b1
--- /dev/null
+++ b/yolov7_seg/det/utils/google_app_engine/Dockerfile
@@ -0,0 +1,25 @@
+FROM gcr.io/google-appengine/python
+
+# Create a virtualenv for dependencies. This isolates these packages from
+# system-level packages.
+# Use -p python3 or -p python3.7 to select python version. Default is version 2.
+RUN virtualenv /env -p python3
+
+# Setting these environment variables are the same as running
+# source /env/bin/activate.
+ENV VIRTUAL_ENV /env
+ENV PATH /env/bin:$PATH
+
+RUN apt-get update && apt-get install -y python-opencv
+
+# Copy the application's requirements.txt and run pip to install all
+# dependencies into the virtualenv.
+ADD requirements.txt /app/requirements.txt
+RUN pip install -r /app/requirements.txt
+
+# Add the application source code.
+ADD . /app
+
+# Run a WSGI server to serve the application. gunicorn must be declared as
+# a dependency in requirements.txt.
+CMD gunicorn -b :$PORT main:app
diff --git a/yolov7_seg/det/utils/google_app_engine/additional_requirements.txt b/yolov7_seg/det/utils/google_app_engine/additional_requirements.txt
new file mode 100644
index 000000000..ed71f8407
--- /dev/null
+++ b/yolov7_seg/det/utils/google_app_engine/additional_requirements.txt
@@ -0,0 +1,4 @@
+# add these requirements in your app on top of the existing ones
+pip==21.1
+Flask==1.0.2
+gunicorn==19.9.0
diff --git a/yolov7_seg/det/utils/google_app_engine/app.yaml b/yolov7_seg/det/utils/google_app_engine/app.yaml
new file mode 100644
index 000000000..1cad968c6
--- /dev/null
+++ b/yolov7_seg/det/utils/google_app_engine/app.yaml
@@ -0,0 +1,14 @@
+runtime: custom
+env: flex
+
+service: yolov5app
+
+liveness_check:
+ initial_delay_sec: 600
+
+manual_scaling:
+ instances: 1
+resources:
+ cpu: 1
+ memory_gb: 4
+ disk_size_gb: 20
diff --git a/yolov7_seg/det/utils/loggers/__init__.py b/yolov7_seg/det/utils/loggers/__init__.py
new file mode 100644
index 000000000..d22fe0f30
--- /dev/null
+++ b/yolov7_seg/det/utils/loggers/__init__.py
@@ -0,0 +1,308 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Logging utils
+"""
+
+import os
+import warnings
+from pathlib import Path
+
+import pkg_resources as pkg
+import torch
+from torch.utils.tensorboard import SummaryWriter
+
+from utils.general import colorstr, cv2
+from utils.loggers.clearml.clearml_utils import ClearmlLogger
+from utils.loggers.wandb.wandb_utils import WandbLogger
+from utils.plots import plot_images, plot_results
+from utils.torch_utils import de_parallel
+
+LOGGERS = ('csv', 'tb', 'wandb', 'clearml') # *.csv, TensorBoard, Weights & Biases, ClearML
+RANK = int(os.getenv('RANK', -1))
+
+try:
+ import wandb
+
+ assert hasattr(wandb, '__version__') # verify package import not local dir
+ if pkg.parse_version(wandb.__version__) >= pkg.parse_version('0.12.2') and RANK in {0, -1}:
+ try:
+ wandb_login_success = wandb.login(timeout=30)
+ except wandb.errors.UsageError: # known non-TTY terminal issue
+ wandb_login_success = False
+ if not wandb_login_success:
+ wandb = None
+except (ImportError, AssertionError):
+ wandb = None
+
+try:
+ import clearml
+
+ assert hasattr(clearml, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ clearml = None
+
+
+class Loggers():
+ # YOLOv5 Loggers class
+ def __init__(self, save_dir=None, weights=None, opt=None, hyp=None, logger=None, include=LOGGERS):
+ self.save_dir = save_dir
+ self.weights = weights
+ self.opt = opt
+ self.hyp = hyp
+ self.logger = logger # for printing results to console
+ self.include = include
+ self.keys = [
+ 'train/box_loss',
+ 'train/obj_loss',
+ 'train/cls_loss', # train loss
+ 'metrics/precision',
+ 'metrics/recall',
+ 'metrics/mAP_0.5',
+ 'metrics/mAP_0.5:0.95', # metrics
+ 'val/box_loss',
+ 'val/obj_loss',
+ 'val/cls_loss', # val loss
+ 'x/lr0',
+ 'x/lr1',
+ 'x/lr2'] # params
+ self.best_keys = ['best/epoch', 'best/precision', 'best/recall', 'best/mAP_0.5', 'best/mAP_0.5:0.95']
+ for k in LOGGERS:
+ setattr(self, k, None) # init empty logger dictionary
+ self.csv = True # always log to csv
+
+ # Messages
+ if not wandb:
+ prefix = colorstr('Weights & Biases: ')
+ s = f"{prefix}run 'pip install wandb' to automatically track and visualize YOLOv5 🚀 runs in Weights & Biases"
+ self.logger.info(s)
+ if not clearml:
+ prefix = colorstr('ClearML: ')
+ s = f"{prefix}run 'pip install clearml' to automatically track, visualize and remotely train YOLOv5 🚀 in ClearML"
+ self.logger.info(s)
+
+ # TensorBoard
+ s = self.save_dir
+ if 'tb' in self.include and not self.opt.evolve:
+ prefix = colorstr('TensorBoard: ')
+ self.logger.info(f"{prefix}Start with 'tensorboard --logdir {s.parent}', view at http://localhost:6006/")
+ self.tb = SummaryWriter(str(s))
+
+ # W&B
+ if wandb and 'wandb' in self.include:
+ wandb_artifact_resume = isinstance(self.opt.resume, str) and self.opt.resume.startswith('wandb-artifact://')
+ run_id = torch.load(self.weights).get('wandb_id') if self.opt.resume and not wandb_artifact_resume else None
+ self.opt.hyp = self.hyp # add hyperparameters
+ self.wandb = WandbLogger(self.opt, run_id)
+ # temp warn. because nested artifacts not supported after 0.12.10
+ if pkg.parse_version(wandb.__version__) >= pkg.parse_version('0.12.11'):
+ s = "YOLOv5 temporarily requires wandb version 0.12.10 or below. Some features may not work as expected."
+ self.logger.warning(s)
+ else:
+ self.wandb = None
+
+ # ClearML
+ if clearml and 'clearml' in self.include:
+ self.clearml = ClearmlLogger(self.opt, self.hyp)
+ else:
+ self.clearml = None
+
+ def on_train_start(self):
+ # Callback runs on train start
+ pass
+
+ def on_pretrain_routine_end(self):
+ # Callback runs on pre-train routine end
+ paths = self.save_dir.glob('*labels*.jpg') # training labels
+ if self.wandb:
+ self.wandb.log({"Labels": [wandb.Image(str(x), caption=x.name) for x in paths]})
+ if self.clearml:
+ pass # ClearML saves these images automatically using hooks
+
+ def on_train_batch_end(self, ni, model, imgs, targets, paths, plots):
+ # Callback runs on train batch end
+ # ni: number integrated batches (since train start)
+ if plots:
+ if ni == 0 and not self.opt.sync_bn and self.tb:
+ log_tensorboard_graph(self.tb, model, imgsz=list(imgs.shape[2:4]))
+ if ni < 3:
+ f = self.save_dir / f'train_batch{ni}.jpg' # filename
+ plot_images(imgs, targets, paths, f)
+ if (self.wandb or self.clearml) and ni == 10:
+ files = sorted(self.save_dir.glob('train*.jpg'))
+ if self.wandb:
+ self.wandb.log({'Mosaics': [wandb.Image(str(f), caption=f.name) for f in files if f.exists()]})
+ if self.clearml:
+ self.clearml.log_debug_samples(files, title='Mosaics')
+
+ def on_train_epoch_end(self, epoch):
+ # Callback runs on train epoch end
+ if self.wandb:
+ self.wandb.current_epoch = epoch + 1
+
+ def on_val_image_end(self, pred, predn, path, names, im):
+ # Callback runs on val image end
+ if self.wandb:
+ self.wandb.val_one_image(pred, predn, path, names, im)
+ if self.clearml:
+ self.clearml.log_image_with_boxes(path, pred, names, im)
+
+ def on_val_end(self):
+ # Callback runs on val end
+ if self.wandb or self.clearml:
+ files = sorted(self.save_dir.glob('val*.jpg'))
+ if self.wandb:
+ self.wandb.log({"Validation": [wandb.Image(str(f), caption=f.name) for f in files]})
+ if self.clearml:
+ self.clearml.log_debug_samples(files, title='Validation')
+
+ def on_fit_epoch_end(self, vals, epoch, best_fitness, fi):
+ # Callback runs at the end of each fit (train+val) epoch
+ x = dict(zip(self.keys, vals))
+ if self.csv:
+ file = self.save_dir / 'results.csv'
+ n = len(x) + 1 # number of cols
+ s = '' if file.exists() else (('%20s,' * n % tuple(['epoch'] + self.keys)).rstrip(',') + '\n') # add header
+ with open(file, 'a') as f:
+ f.write(s + ('%20.5g,' * n % tuple([epoch] + vals)).rstrip(',') + '\n')
+
+ if self.tb:
+ for k, v in x.items():
+ self.tb.add_scalar(k, v, epoch)
+ elif self.clearml: # log to ClearML if TensorBoard not used
+ for k, v in x.items():
+ title, series = k.split('/')
+ self.clearml.task.get_logger().report_scalar(title, series, v, epoch)
+
+ if self.wandb:
+ if best_fitness == fi:
+ best_results = [epoch] + vals[3:7]
+ for i, name in enumerate(self.best_keys):
+ self.wandb.wandb_run.summary[name] = best_results[i] # log best results in the summary
+ self.wandb.log(x)
+ self.wandb.end_epoch(best_result=best_fitness == fi)
+
+ if self.clearml:
+ self.clearml.current_epoch_logged_images = set() # reset epoch image limit
+ self.clearml.current_epoch += 1
+
+ def on_model_save(self, last, epoch, final_epoch, best_fitness, fi):
+ # Callback runs on model save event
+ if self.wandb:
+ if ((epoch + 1) % self.opt.save_period == 0 and not final_epoch) and self.opt.save_period != -1:
+ self.wandb.log_model(last.parent, self.opt, epoch, fi, best_model=best_fitness == fi)
+
+ if self.clearml:
+ if ((epoch + 1) % self.opt.save_period == 0 and not final_epoch) and self.opt.save_period != -1:
+ self.clearml.task.update_output_model(model_path=str(last),
+ model_name='Latest Model',
+ auto_delete_file=False)
+
+ def on_train_end(self, last, best, plots, epoch, results):
+ # Callback runs on training end
+ if plots:
+ plot_results(file=self.save_dir / 'results.csv') # save results.png
+ files = ['results.png', 'confusion_matrix.png', *(f'{x}_curve.png' for x in ('F1', 'PR', 'P', 'R'))]
+ files = [(self.save_dir / f) for f in files if (self.save_dir / f).exists()] # filter
+ self.logger.info(f"Results saved to {colorstr('bold', self.save_dir)}")
+
+ if self.tb and not self.clearml: # These images are already captured by ClearML by now, we don't want doubles
+ for f in files:
+ self.tb.add_image(f.stem, cv2.imread(str(f))[..., ::-1], epoch, dataformats='HWC')
+
+ if self.wandb:
+ self.wandb.log(dict(zip(self.keys[3:10], results)))
+ self.wandb.log({"Results": [wandb.Image(str(f), caption=f.name) for f in files]})
+ # Calling wandb.log. TODO: Refactor this into WandbLogger.log_model
+ if not self.opt.evolve:
+ wandb.log_artifact(str(best if best.exists() else last),
+ type='model',
+ name=f'run_{self.wandb.wandb_run.id}_model',
+ aliases=['latest', 'best', 'stripped'])
+ self.wandb.finish_run()
+
+ if self.clearml:
+ # Save the best model here
+ if not self.opt.evolve:
+ self.clearml.task.update_output_model(model_path=str(best if best.exists() else last),
+ name='Best Model')
+
+ def on_params_update(self, params):
+ # Update hyperparams or configs of the experiment
+ # params: A dict containing {param: value} pairs
+ if self.wandb:
+ self.wandb.wandb_run.config.update(params, allow_val_change=True)
+
+
+class GenericLogger:
+ """
+ YOLOv5 General purpose logger for non-task specific logging
+ Usage: from utils.loggers import GenericLogger; logger = GenericLogger(...)
+ Arguments
+ opt: Run arguments
+ console_logger: Console logger
+ include: loggers to include
+ """
+
+ def __init__(self, opt, console_logger, include=('tb', 'wandb')):
+ # init default loggers
+ self.save_dir = opt.save_dir
+ self.include = include
+ self.console_logger = console_logger
+ if 'tb' in self.include:
+ prefix = colorstr('TensorBoard: ')
+ self.console_logger.info(
+ f"{prefix}Start with 'tensorboard --logdir {self.save_dir.parent}', view at http://localhost:6006/")
+ self.tb = SummaryWriter(str(self.save_dir))
+
+ if wandb and 'wandb' in self.include:
+ self.wandb = wandb.init(project="YOLOv5-Classifier" if opt.project == "runs/train" else opt.project,
+ name=None if opt.name == "exp" else opt.name,
+ config=opt)
+ else:
+ self.wandb = None
+
+ def log_metrics(self, metrics_dict, epoch):
+ # Log metrics dictionary to all loggers
+ if self.tb:
+ for k, v in metrics_dict.items():
+ self.tb.add_scalar(k, v, epoch)
+
+ if self.wandb:
+ self.wandb.log(metrics_dict, step=epoch)
+
+ def log_images(self, files, name='Images', epoch=0):
+ # Log images to all loggers
+ files = [Path(f) for f in (files if isinstance(files, (tuple, list)) else [files])] # to Path
+ files = [f for f in files if f.exists()] # filter by exists
+
+ if self.tb:
+ for f in files:
+ self.tb.add_image(f.stem, cv2.imread(str(f))[..., ::-1], epoch, dataformats='HWC')
+
+ if self.wandb:
+ self.wandb.log({name: [wandb.Image(str(f), caption=f.name) for f in files]}, step=epoch)
+
+ def log_graph(self, model, imgsz=(640, 640)):
+ # Log model graph to all loggers
+ if self.tb:
+ log_tensorboard_graph(self.tb, model, imgsz)
+
+ def log_model(self, model_path, epoch=0, metadata={}):
+ # Log model to all loggers
+ if self.wandb:
+ art = wandb.Artifact(name=f"run_{wandb.run.id}_model", type="model", metadata=metadata)
+ art.add_file(str(model_path))
+ wandb.log_artifact(art)
+
+
+def log_tensorboard_graph(tb, model, imgsz=(640, 640)):
+ # Log model graph to TensorBoard
+ try:
+ p = next(model.parameters()) # for device, type
+ imgsz = (imgsz, imgsz) if isinstance(imgsz, int) else imgsz # expand
+ im = torch.zeros((1, 3, *imgsz)).to(p.device).type_as(p) # input image
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress jit trace warning
+ tb.add_graph(torch.jit.trace(de_parallel(model), im, strict=False), [])
+ except Exception:
+ print('WARNING: TensorBoard graph visualization failure')
diff --git a/yolov7_seg/det/utils/loggers/clearml/README.md b/yolov7_seg/det/utils/loggers/clearml/README.md
new file mode 100644
index 000000000..7d9c51d14
--- /dev/null
+++ b/yolov7_seg/det/utils/loggers/clearml/README.md
@@ -0,0 +1,222 @@
+# ClearML Integration
+
+
+
+## About ClearML
+
+[ClearML](https://cutt.ly/yolov5-tutorial-clearml) is an [open-source](https://github.com/allegroai/clearml) toolbox designed to save you time ⏱️.
+
+🔨 Track every YOLOv5 training run in the experiment manager
+
+🔧 Version and easily access your custom training data with the integrated ClearML Data Versioning Tool
+
+🔦 Remotely train and monitor your YOLOv5 training runs using ClearML Agent
+
+🔬 Get the very best mAP using ClearML Hyperparameter Optimization
+
+🔭 Turn your newly trained YOLOv5 model into an API with just a few commands using ClearML Serving
+
+
+And so much more. It's up to you how many of these tools you want to use, you can stick to the experiment manager, or chain them all together into an impressive pipeline!
+
+
+
+
+
+
+
+
+
+## 🦾 Setting Things Up
+
+To keep track of your experiments and/or data, ClearML needs to communicate to a server. You have 2 options to get one:
+
+Either sign up for free to the [ClearML Hosted Service](https://cutt.ly/yolov5-tutorial-clearml) or you can set up your own server, see [here](https://clear.ml/docs/latest/docs/deploying_clearml/clearml_server). Even the server is open-source, so even if you're dealing with sensitive data, you should be good to go!
+
+1. Install the `clearml` python package:
+
+ ```bash
+ pip install clearml
+ ```
+
+1. Connect the ClearML SDK to the server by [creating credentials](https://app.clear.ml/settings/workspace-configuration) (go right top to Settings -> Workspace -> Create new credentials), then execute the command below and follow the instructions:
+
+ ```bash
+ clearml-init
+ ```
+
+That's it! You're done 😎
+
+
+
+## 🚀 Training YOLOv5 With ClearML
+
+To enable ClearML experiment tracking, simply install the ClearML pip package.
+
+```bash
+pip install clearml
+```
+
+This will enable integration with the YOLOv5 training script. Every training run from now on, will be captured and stored by the ClearML experiment manager. If you want to change the `project_name` or `task_name`, head over to our custom logger, where you can change it: `utils/loggers/clearml/clearml_utils.py`
+
+```bash
+python train.py --img 640 --batch 16 --epochs 3 --data coco128.yaml --weights yolov5s.pt --cache
+```
+
+This will capture:
+- Source code + uncommitted changes
+- Installed packages
+- (Hyper)parameters
+- Model files (use `--save-period n` to save a checkpoint every n epochs)
+- Console output
+- Scalars (mAP_0.5, mAP_0.5:0.95, precision, recall, losses, learning rates, ...)
+- General info such as machine details, runtime, creation date etc.
+- All produced plots such as label correlogram and confusion matrix
+- Images with bounding boxes per epoch
+- Mosaic per epoch
+- Validation images per epoch
+- ...
+
+That's a lot right? 🤯
+Now, we can visualize all of this information in the ClearML UI to get an overview of our training progress. Add custom columns to the table view (such as e.g. mAP_0.5) so you can easily sort on the best performing model. Or select multiple experiments and directly compare them!
+
+There even more we can do with all of this information, like hyperparameter optimization and remote execution, so keep reading if you want to see how that works!
+
+
+
+## 🔗 Dataset Version Management
+
+Versioning your data separately from your code is generally a good idea and makes it easy to aqcuire the latest version too. This repository supports supplying a dataset version ID and it will make sure to get the data if it's not there yet. Next to that, this workflow also saves the used dataset ID as part of the task parameters, so you will always know for sure which data was used in which experiment!
+
+
+
+### Prepare Your Dataset
+
+The YOLOv5 repository supports a number of different datasets by using yaml files containing their information. By default datasets are downloaded to the `../datasets` folder in relation to the repository root folder. So if you downloaded the `coco128` dataset using the link in the yaml or with the scripts provided by yolov5, you get this folder structure:
+
+```
+..
+|_ yolov5
+|_ datasets
+ |_ coco128
+ |_ images
+ |_ labels
+ |_ LICENSE
+ |_ README.txt
+```
+But this can be any dataset you wish. Feel free to use your own, as long as you keep to this folder structure.
+
+Next, ⚠️**copy the corresponding yaml file to the root of the dataset folder**⚠️. This yaml files contains the information ClearML will need to properly use the dataset. You can make this yourself too, of course, just follow the structure of the example yamls.
+
+Basically we need the following keys: `path`, `train`, `test`, `val`, `nc`, `names`.
+
+```
+..
+|_ yolov5
+|_ datasets
+ |_ coco128
+ |_ images
+ |_ labels
+ |_ coco128.yaml # <---- HERE!
+ |_ LICENSE
+ |_ README.txt
+```
+
+### Upload Your Dataset
+
+To get this dataset into ClearML as a versionned dataset, go to the dataset root folder and run the following command:
+```bash
+cd coco128
+clearml-data sync --project YOLOv5 --name coco128 --folder .
+```
+
+The command `clearml-data sync` is actually a shorthand command. You could also run these commands one after the other:
+```bash
+# Optionally add --parent if you want to base
+# this version on another dataset version, so no duplicate files are uploaded!
+clearml-data create --name coco128 --project YOLOv5
+clearml-data add --files .
+clearml-data close
+```
+
+### Run Training Using A ClearML Dataset
+
+Now that you have a ClearML dataset, you can very simply use it to train custom YOLOv5 🚀 models!
+
+```bash
+python train.py --img 640 --batch 16 --epochs 3 --data clearml:// --weights yolov5s.pt --cache
+```
+
+
+
+## 👀 Hyperparameter Optimization
+
+Now that we have our experiments and data versioned, it's time to take a look at what we can build on top!
+
+Using the code information, installed packages and environment details, the experiment itself is now **completely reproducible**. In fact, ClearML allows you to clone an experiment and even change its parameters. We can then just rerun it with these new parameters automatically, this is basically what HPO does!
+
+To **run hyperparameter optimization locally**, we've included a pre-made script for you. Just make sure a training task has been run at least once, so it is in the ClearML experiment manager, we will essentially clone it and change its hyperparameters.
+
+You'll need to fill in the ID of this `template task` in the script found at `utils/loggers/clearml/hpo.py` and then just run it :) You can change `task.execute_locally()` to `task.execute()` to put it in a ClearML queue and have a remote agent work on it instead.
+
+```bash
+# To use optuna, install it first, otherwise you can change the optimizer to just be RandomSearch
+pip install optuna
+python utils/loggers/clearml/hpo.py
+```
+
+
+
+## 🤯 Remote Execution (advanced)
+
+Running HPO locally is really handy, but what if we want to run our experiments on a remote machine instead? Maybe you have access to a very powerful GPU machine on-site or you have some budget to use cloud GPUs.
+This is where the ClearML Agent comes into play. Check out what the agent can do here:
+
+- [YouTube video](https://youtu.be/MX3BrXnaULs)
+- [Documentation](https://clear.ml/docs/latest/docs/clearml_agent)
+
+In short: every experiment tracked by the experiment manager contains enough information to reproduce it on a different machine (installed packages, uncommitted changes etc.). So a ClearML agent does just that: it listens to a queue for incoming tasks and when it finds one, it recreates the environment and runs it while still reporting scalars, plots etc. to the experiment manager.
+
+You can turn any machine (a cloud VM, a local GPU machine, your own laptop ... ) into a ClearML agent by simply running:
+```bash
+clearml-agent daemon --queue [--docker]
+```
+
+### Cloning, Editing And Enqueuing
+
+With our agent running, we can give it some work. Remember from the HPO section that we can clone a task and edit the hyperparameters? We can do that from the interface too!
+
+🪄 Clone the experiment by right clicking it
+
+🎯 Edit the hyperparameters to what you wish them to be
+
+⏳ Enqueue the task to any of the queues by right clicking it
+
+
+
+### Executing A Task Remotely
+
+Now you can clone a task like we explained above, or simply mark your current script by adding `task.execute_remotely()` and on execution it will be put into a queue, for the agent to start working on!
+
+To run the YOLOv5 training script remotely, all you have to do is add this line to the training.py script after the clearml logger has been instatiated:
+```python
+# ...
+# Loggers
+data_dict = None
+if RANK in {-1, 0}:
+ loggers = Loggers(save_dir, weights, opt, hyp, LOGGER) # loggers instance
+ if loggers.clearml:
+ loggers.clearml.task.execute_remotely(queue='my_queue') # <------ ADD THIS LINE
+ # Data_dict is either None is user did not choose for ClearML dataset or is filled in by ClearML
+ data_dict = loggers.clearml.data_dict
+# ...
+```
+When running the training script after this change, python will run the script up until that line, after which it will package the code and send it to the queue instead!
+
+### Autoscaling workers
+
+ClearML comes with autoscalers too! This tool will automatically spin up new remote machines in the cloud of your choice (AWS, GCP, Azure) and turn them into ClearML agents for you whenever there are experiments detected in the queue. Once the tasks are processed, the autoscaler will automatically shut down the remote machines and you stop paying!
+
+Check out the autoscalers getting started video below.
+
+[](https://youtu.be/j4XVMAaUt3E)
diff --git a/yolov7_seg/det/utils/loggers/clearml/__init__.py b/yolov7_seg/det/utils/loggers/clearml/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/yolov7_seg/det/utils/loggers/clearml/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/yolov7_seg/det/utils/loggers/clearml/clearml_utils.py b/yolov7_seg/det/utils/loggers/clearml/clearml_utils.py
new file mode 100644
index 000000000..b77a30e67
--- /dev/null
+++ b/yolov7_seg/det/utils/loggers/clearml/clearml_utils.py
@@ -0,0 +1,156 @@
+"""Main Logger class for ClearML experiment tracking."""
+import glob
+import re
+from pathlib import Path
+
+import numpy as np
+import yaml
+
+from utils.plots import Annotator, colors
+
+try:
+ import clearml
+ from clearml import Dataset, Task
+ assert hasattr(clearml, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ clearml = None
+
+
+def construct_dataset(clearml_info_string):
+ """Load in a clearml dataset and fill the internal data_dict with its contents.
+ """
+ dataset_id = clearml_info_string.replace('clearml://', '')
+ dataset = Dataset.get(dataset_id=dataset_id)
+ dataset_root_path = Path(dataset.get_local_copy())
+
+ # We'll search for the yaml file definition in the dataset
+ yaml_filenames = list(glob.glob(str(dataset_root_path / "*.yaml")) + glob.glob(str(dataset_root_path / "*.yml")))
+ if len(yaml_filenames) > 1:
+ raise ValueError('More than one yaml file was found in the dataset root, cannot determine which one contains '
+ 'the dataset definition this way.')
+ elif len(yaml_filenames) == 0:
+ raise ValueError('No yaml definition found in dataset root path, check that there is a correct yaml file '
+ 'inside the dataset root path.')
+ with open(yaml_filenames[0]) as f:
+ dataset_definition = yaml.safe_load(f)
+
+ assert set(dataset_definition.keys()).issuperset(
+ {'train', 'test', 'val', 'nc', 'names'}
+ ), "The right keys were not found in the yaml file, make sure it at least has the following keys: ('train', 'test', 'val', 'nc', 'names')"
+
+ data_dict = dict()
+ data_dict['train'] = str(
+ (dataset_root_path / dataset_definition['train']).resolve()) if dataset_definition['train'] else None
+ data_dict['test'] = str(
+ (dataset_root_path / dataset_definition['test']).resolve()) if dataset_definition['test'] else None
+ data_dict['val'] = str(
+ (dataset_root_path / dataset_definition['val']).resolve()) if dataset_definition['val'] else None
+ data_dict['nc'] = dataset_definition['nc']
+ data_dict['names'] = dataset_definition['names']
+
+ return data_dict
+
+
+class ClearmlLogger:
+ """Log training runs, datasets, models, and predictions to ClearML.
+
+ This logger sends information to ClearML at app.clear.ml or to your own hosted server. By default,
+ this information includes hyperparameters, system configuration and metrics, model metrics, code information and
+ basic data metrics and analyses.
+
+ By providing additional command line arguments to train.py, datasets,
+ models and predictions can also be logged.
+ """
+
+ def __init__(self, opt, hyp):
+ """
+ - Initialize ClearML Task, this object will capture the experiment
+ - Upload dataset version to ClearML Data if opt.upload_dataset is True
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ hyp (dict) -- Hyperparameters for this run
+
+ """
+ self.current_epoch = 0
+ # Keep tracked of amount of logged images to enforce a limit
+ self.current_epoch_logged_images = set()
+ # Maximum number of images to log to clearML per epoch
+ self.max_imgs_to_log_per_epoch = 16
+ # Get the interval of epochs when bounding box images should be logged
+ self.bbox_interval = opt.bbox_interval
+ self.clearml = clearml
+ self.task = None
+ self.data_dict = None
+ if self.clearml:
+ self.task = Task.init(
+ project_name='YOLOv5',
+ task_name='training',
+ tags=['YOLOv5'],
+ output_uri=True,
+ auto_connect_frameworks={'pytorch': False}
+ # We disconnect pytorch auto-detection, because we added manual model save points in the code
+ )
+ # ClearML's hooks will already grab all general parameters
+ # Only the hyperparameters coming from the yaml config file
+ # will have to be added manually!
+ self.task.connect(hyp, name='Hyperparameters')
+
+ # Get ClearML Dataset Version if requested
+ if opt.data.startswith('clearml://'):
+ # data_dict should have the following keys:
+ # names, nc (number of classes), test, train, val (all three relative paths to ../datasets)
+ self.data_dict = construct_dataset(opt.data)
+ # Set data to data_dict because wandb will crash without this information and opt is the best way
+ # to give it to them
+ opt.data = self.data_dict
+
+ def log_debug_samples(self, files, title='Debug Samples'):
+ """
+ Log files (images) as debug samples in the ClearML task.
+
+ arguments:
+ files (List(PosixPath)) a list of file paths in PosixPath format
+ title (str) A title that groups together images with the same values
+ """
+ for f in files:
+ if f.exists():
+ it = re.search(r'_batch(\d+)', f.name)
+ iteration = int(it.groups()[0]) if it else 0
+ self.task.get_logger().report_image(title=title,
+ series=f.name.replace(it.group(), ''),
+ local_path=str(f),
+ iteration=iteration)
+
+ def log_image_with_boxes(self, image_path, boxes, class_names, image, conf_threshold=0.25):
+ """
+ Draw the bounding boxes on a single image and report the result as a ClearML debug sample.
+
+ arguments:
+ image_path (PosixPath) the path the original image file
+ boxes (list): list of scaled predictions in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ class_names (dict): dict containing mapping of class int to class name
+ image (Tensor): A torch tensor containing the actual image data
+ """
+ if len(self.current_epoch_logged_images) < self.max_imgs_to_log_per_epoch and self.current_epoch >= 0:
+ # Log every bbox_interval times and deduplicate for any intermittend extra eval runs
+ if self.current_epoch % self.bbox_interval == 0 and image_path not in self.current_epoch_logged_images:
+ im = np.ascontiguousarray(np.moveaxis(image.mul(255).clamp(0, 255).byte().cpu().numpy(), 0, 2))
+ annotator = Annotator(im=im, pil=True)
+ for i, (conf, class_nr, box) in enumerate(zip(boxes[:, 4], boxes[:, 5], boxes[:, :4])):
+ color = colors(i)
+
+ class_name = class_names[int(class_nr)]
+ confidence = round(float(conf) * 100, 2)
+ label = f"{class_name}: {confidence}%"
+
+ if confidence > conf_threshold:
+ annotator.rectangle(box.cpu().numpy(), outline=color)
+ annotator.box_label(box.cpu().numpy(), label=label, color=color)
+
+ annotated_image = annotator.result()
+ self.task.get_logger().report_image(title='Bounding Boxes',
+ series=image_path.name,
+ iteration=self.current_epoch,
+ image=annotated_image)
+ self.current_epoch_logged_images.add(image_path)
diff --git a/yolov7_seg/det/utils/loggers/clearml/hpo.py b/yolov7_seg/det/utils/loggers/clearml/hpo.py
new file mode 100644
index 000000000..bb3b36385
--- /dev/null
+++ b/yolov7_seg/det/utils/loggers/clearml/hpo.py
@@ -0,0 +1,84 @@
+from clearml import Task
+# Connecting ClearML with the current process,
+# from here on everything is logged automatically
+from clearml.automation import HyperParameterOptimizer, UniformParameterRange
+from clearml.automation.optuna import OptimizerOptuna
+
+task = Task.init(project_name='Hyper-Parameter Optimization',
+ task_name='YOLOv5',
+ task_type=Task.TaskTypes.optimizer,
+ reuse_last_task_id=False)
+
+# Example use case:
+optimizer = HyperParameterOptimizer(
+ # This is the experiment we want to optimize
+ base_task_id='',
+ # here we define the hyper-parameters to optimize
+ # Notice: The parameter name should exactly match what you see in the UI: /
+ # For Example, here we see in the base experiment a section Named: "General"
+ # under it a parameter named "batch_size", this becomes "General/batch_size"
+ # If you have `argparse` for example, then arguments will appear under the "Args" section,
+ # and you should instead pass "Args/batch_size"
+ hyper_parameters=[
+ UniformParameterRange('Hyperparameters/lr0', min_value=1e-5, max_value=1e-1),
+ UniformParameterRange('Hyperparameters/lrf', min_value=0.01, max_value=1.0),
+ UniformParameterRange('Hyperparameters/momentum', min_value=0.6, max_value=0.98),
+ UniformParameterRange('Hyperparameters/weight_decay', min_value=0.0, max_value=0.001),
+ UniformParameterRange('Hyperparameters/warmup_epochs', min_value=0.0, max_value=5.0),
+ UniformParameterRange('Hyperparameters/warmup_momentum', min_value=0.0, max_value=0.95),
+ UniformParameterRange('Hyperparameters/warmup_bias_lr', min_value=0.0, max_value=0.2),
+ UniformParameterRange('Hyperparameters/box', min_value=0.02, max_value=0.2),
+ UniformParameterRange('Hyperparameters/cls', min_value=0.2, max_value=4.0),
+ UniformParameterRange('Hyperparameters/cls_pw', min_value=0.5, max_value=2.0),
+ UniformParameterRange('Hyperparameters/obj', min_value=0.2, max_value=4.0),
+ UniformParameterRange('Hyperparameters/obj_pw', min_value=0.5, max_value=2.0),
+ UniformParameterRange('Hyperparameters/iou_t', min_value=0.1, max_value=0.7),
+ UniformParameterRange('Hyperparameters/anchor_t', min_value=2.0, max_value=8.0),
+ UniformParameterRange('Hyperparameters/fl_gamma', min_value=0.0, max_value=4.0),
+ UniformParameterRange('Hyperparameters/hsv_h', min_value=0.0, max_value=0.1),
+ UniformParameterRange('Hyperparameters/hsv_s', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/hsv_v', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/degrees', min_value=0.0, max_value=45.0),
+ UniformParameterRange('Hyperparameters/translate', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/scale', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/shear', min_value=0.0, max_value=10.0),
+ UniformParameterRange('Hyperparameters/perspective', min_value=0.0, max_value=0.001),
+ UniformParameterRange('Hyperparameters/flipud', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/fliplr', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/mosaic', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/mixup', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/copy_paste', min_value=0.0, max_value=1.0)],
+ # this is the objective metric we want to maximize/minimize
+ objective_metric_title='metrics',
+ objective_metric_series='mAP_0.5',
+ # now we decide if we want to maximize it or minimize it (accuracy we maximize)
+ objective_metric_sign='max',
+ # let us limit the number of concurrent experiments,
+ # this in turn will make sure we do dont bombard the scheduler with experiments.
+ # if we have an auto-scaler connected, this, by proxy, will limit the number of machine
+ max_number_of_concurrent_tasks=1,
+ # this is the optimizer class (actually doing the optimization)
+ # Currently, we can choose from GridSearch, RandomSearch or OptimizerBOHB (Bayesian optimization Hyper-Band)
+ optimizer_class=OptimizerOptuna,
+ # If specified only the top K performing Tasks will be kept, the others will be automatically archived
+ save_top_k_tasks_only=5, # 5,
+ compute_time_limit=None,
+ total_max_jobs=20,
+ min_iteration_per_job=None,
+ max_iteration_per_job=None,
+)
+
+# report every 10 seconds, this is way too often, but we are testing here
+optimizer.set_report_period(10)
+# You can also use the line below instead to run all the optimizer tasks locally, without using queues or agent
+# an_optimizer.start_locally(job_complete_callback=job_complete_callback)
+# set the time limit for the optimization process (2 hours)
+optimizer.set_time_limit(in_minutes=120.0)
+# Start the optimization process in the local environment
+optimizer.start_locally()
+# wait until process is done (notice we are controlling the optimization process in the background)
+optimizer.wait()
+# make sure background optimization stopped
+optimizer.stop()
+
+print('We are done, good bye')
diff --git a/yolov7_seg/det/utils/loggers/wandb/README.md b/yolov7_seg/det/utils/loggers/wandb/README.md
new file mode 100644
index 000000000..d37b7226b
--- /dev/null
+++ b/yolov7_seg/det/utils/loggers/wandb/README.md
@@ -0,0 +1,162 @@
+📚 This guide explains how to use **Weights & Biases** (W&B) with YOLOv5 🚀. UPDATED 29 September 2021.
+
+- [About Weights & Biases](#about-weights-&-biases)
+- [First-Time Setup](#first-time-setup)
+- [Viewing runs](#viewing-runs)
+- [Disabling wandb](#disabling-wandb)
+- [Advanced Usage: Dataset Versioning and Evaluation](#advanced-usage)
+- [Reports: Share your work with the world!](#reports)
+
+## About Weights & Biases
+
+Think of [W&B](https://wandb.ai/site?utm_campaign=repo_yolo_wandbtutorial) like GitHub for machine learning models. With a few lines of code, save everything you need to debug, compare and reproduce your models — architecture, hyperparameters, git commits, model weights, GPU usage, and even datasets and predictions.
+
+Used by top researchers including teams at OpenAI, Lyft, Github, and MILA, W&B is part of the new standard of best practices for machine learning. How W&B can help you optimize your machine learning workflows:
+
+- [Debug](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Free-2) model performance in real time
+- [GPU usage](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#System-4) visualized automatically
+- [Custom charts](https://wandb.ai/wandb/customizable-charts/reports/Powerful-Custom-Charts-To-Debug-Model-Peformance--VmlldzoyNzY4ODI) for powerful, extensible visualization
+- [Share insights](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Share-8) interactively with collaborators
+- [Optimize hyperparameters](https://docs.wandb.com/sweeps) efficiently
+- [Track](https://docs.wandb.com/artifacts) datasets, pipelines, and production models
+
+## First-Time Setup
+
+
+ Toggle Details
+When you first train, W&B will prompt you to create a new account and will generate an **API key** for you. If you are an existing user you can retrieve your key from https://wandb.ai/authorize. This key is used to tell W&B where to log your data. You only need to supply your key once, and then it is remembered on the same device.
+
+W&B will create a cloud **project** (default is 'YOLOv5') for your training runs, and each new training run will be provided a unique run **name** within that project as project/name. You can also manually set your project and run name as:
+
+```shell
+$ python train.py --project ... --name ...
+```
+
+YOLOv5 notebook example:
+
+
+
+
+## Viewing Runs
+
+
+ Toggle Details
+Run information streams from your environment to the W&B cloud console as you train. This allows you to monitor and even cancel runs in realtime . All important information is logged:
+
+- Training & Validation losses
+- Metrics: Precision, Recall, mAP@0.5, mAP@0.5:0.95
+- Learning Rate over time
+- A bounding box debugging panel, showing the training progress over time
+- GPU: Type, **GPU Utilization**, power, temperature, **CUDA memory usage**
+- System: Disk I/0, CPU utilization, RAM memory usage
+- Your trained model as W&B Artifact
+- Environment: OS and Python types, Git repository and state, **training command**
+
+
+
+
+## Disabling wandb
+
+- training after running `wandb disabled` inside that directory creates no wandb run
+ 
+
+- To enable wandb again, run `wandb online`
+ 
+
+## Advanced Usage
+
+You can leverage W&B artifacts and Tables integration to easily visualize and manage your datasets, models and training evaluations. Here are some quick examples to get you started.
+
+
+ 1: Train and Log Evaluation simultaneousy
+ This is an extension of the previous section, but it'll also training after uploading the dataset. This also evaluation Table
+ Evaluation table compares your predictions and ground truths across the validation set for each epoch. It uses the references to the already uploaded datasets,
+ so no images will be uploaded from your system more than once.
+
+ Usage
+ Code $ python train.py --upload_data val
+
+
+
+
+
+2. Visualize and Version Datasets
+ Log, visualize, dynamically query, and understand your data with W&B Tables. You can use the following command to log your dataset as a W&B Table. This will generate a {dataset}_wandb.yaml file which can be used to train from dataset artifact.
+
+ Usage
+ Code $ python utils/logger/wandb/log_dataset.py --project ... --name ... --data ..
+
+
+
+
+
+ 3: Train using dataset artifact
+ When you upload a dataset as described in the first section, you get a new config file with an added `_wandb` to its name. This file contains the information that
+ can be used to train a model directly from the dataset artifact. This also logs evaluation
+
+ Usage
+ Code $ python train.py --data {data}_wandb.yaml
+
+
+
+
+
+ 4: Save model checkpoints as artifacts
+ To enable saving and versioning checkpoints of your experiment, pass `--save_period n` with the base cammand, where `n` represents checkpoint interval.
+ You can also log both the dataset and model checkpoints simultaneously. If not passed, only the final model will be logged
+
+
+ Usage
+ Code $ python train.py --save_period 1
+
+
+
+
+
+
+
+ 5: Resume runs from checkpoint artifacts.
+Any run can be resumed using artifacts if the --resume argument starts with wandb-artifact:// prefix followed by the run path, i.e, wandb-artifact://username/project/runid . This doesn't require the model checkpoint to be present on the local system.
+
+
+ Usage
+ Code $ python train.py --resume wandb-artifact://{run_path}
+
+
+
+
+
+ 6: Resume runs from dataset artifact & checkpoint artifacts.
+ Local dataset or model checkpoints are not required. This can be used to resume runs directly on a different device
+ The syntax is same as the previous section, but you'll need to lof both the dataset and model checkpoints as artifacts, i.e, set bot --upload_dataset or
+ train from _wandb.yaml file and set --save_period
+
+
+ Usage
+ Code $ python train.py --resume wandb-artifact://{run_path}
+
+
+
+
+
+
+
+ Reports
+W&B Reports can be created from your saved runs for sharing online. Once a report is created you will receive a link you can use to publically share your results. Here is an example report created from the COCO128 tutorial trainings of all four YOLOv5 models ([link](https://wandb.ai/glenn-jocher/yolov5_tutorial/reports/YOLOv5-COCO128-Tutorial-Results--VmlldzozMDI5OTY)).
+
+
+
+## Environments
+
+YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):
+
+- **Google Colab and Kaggle** notebooks with free GPU:
+- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
+- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
+- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
+
+## Status
+
+
+
+If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.
diff --git a/yolov7_seg/det/utils/loggers/wandb/__init__.py b/yolov7_seg/det/utils/loggers/wandb/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/yolov7_seg/det/utils/loggers/wandb/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/yolov7_seg/det/utils/loggers/wandb/log_dataset.py b/yolov7_seg/det/utils/loggers/wandb/log_dataset.py
new file mode 100644
index 000000000..072969c75
--- /dev/null
+++ b/yolov7_seg/det/utils/loggers/wandb/log_dataset.py
@@ -0,0 +1,27 @@
+import argparse
+
+from wandb_utils import WandbLogger
+
+from utils.general import LOGGER
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ logger = WandbLogger(opt, None, job_type='Dataset Creation') # TODO: return value unused
+ if not logger.wandb:
+ LOGGER.info("install wandb using `pip install wandb` to log the dataset")
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOv5', help='name of W&B Project')
+ parser.add_argument('--entity', default=None, help='W&B entity')
+ parser.add_argument('--name', type=str, default='log dataset', help='name of W&B run')
+
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/yolov7_seg/det/utils/loggers/wandb/sweep.py b/yolov7_seg/det/utils/loggers/wandb/sweep.py
new file mode 100644
index 000000000..735c96886
--- /dev/null
+++ b/yolov7_seg/det/utils/loggers/wandb/sweep.py
@@ -0,0 +1,41 @@
+import sys
+from pathlib import Path
+
+import wandb
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from train import parse_opt, train
+from utils.callbacks import Callbacks
+from utils.general import increment_path
+from utils.torch_utils import select_device
+
+
+def sweep():
+ wandb.init()
+ # Get hyp dict from sweep agent. Copy because train() modifies parameters which confused wandb.
+ hyp_dict = vars(wandb.config).get("_items").copy()
+
+ # Workaround: get necessary opt args
+ opt = parse_opt(known=True)
+ opt.batch_size = hyp_dict.get("batch_size")
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
+ opt.epochs = hyp_dict.get("epochs")
+ opt.nosave = True
+ opt.data = hyp_dict.get("data")
+ opt.weights = str(opt.weights)
+ opt.cfg = str(opt.cfg)
+ opt.data = str(opt.data)
+ opt.hyp = str(opt.hyp)
+ opt.project = str(opt.project)
+ device = select_device(opt.device, batch_size=opt.batch_size)
+
+ # train
+ train(hyp_dict, opt, device, callbacks=Callbacks())
+
+
+if __name__ == "__main__":
+ sweep()
diff --git a/yolov7_seg/det/utils/loggers/wandb/sweep.yaml b/yolov7_seg/det/utils/loggers/wandb/sweep.yaml
new file mode 100644
index 000000000..044fca319
--- /dev/null
+++ b/yolov7_seg/det/utils/loggers/wandb/sweep.yaml
@@ -0,0 +1,143 @@
+# Hyperparameters for training
+# To set range-
+# Provide min and max values as:
+# parameter:
+#
+# min: scalar
+# max: scalar
+# OR
+#
+# Set a specific list of search space-
+# parameter:
+# values: [scalar1, scalar2, scalar3...]
+#
+# You can use grid, bayesian and hyperopt search strategy
+# For more info on configuring sweeps visit - https://docs.wandb.ai/guides/sweeps/configuration
+
+program: utils/loggers/wandb/sweep.py
+method: random
+metric:
+ name: metrics/mAP_0.5
+ goal: maximize
+
+parameters:
+ # hyperparameters: set either min, max range or values list
+ data:
+ value: "data/coco128.yaml"
+ batch_size:
+ values: [64]
+ epochs:
+ values: [10]
+
+ lr0:
+ distribution: uniform
+ min: 1e-5
+ max: 1e-1
+ lrf:
+ distribution: uniform
+ min: 0.01
+ max: 1.0
+ momentum:
+ distribution: uniform
+ min: 0.6
+ max: 0.98
+ weight_decay:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ warmup_epochs:
+ distribution: uniform
+ min: 0.0
+ max: 5.0
+ warmup_momentum:
+ distribution: uniform
+ min: 0.0
+ max: 0.95
+ warmup_bias_lr:
+ distribution: uniform
+ min: 0.0
+ max: 0.2
+ box:
+ distribution: uniform
+ min: 0.02
+ max: 0.2
+ cls:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ cls_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ obj:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ obj_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ iou_t:
+ distribution: uniform
+ min: 0.1
+ max: 0.7
+ anchor_t:
+ distribution: uniform
+ min: 2.0
+ max: 8.0
+ fl_gamma:
+ distribution: uniform
+ min: 0.0
+ max: 4.0
+ hsv_h:
+ distribution: uniform
+ min: 0.0
+ max: 0.1
+ hsv_s:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ hsv_v:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ degrees:
+ distribution: uniform
+ min: 0.0
+ max: 45.0
+ translate:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ scale:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ shear:
+ distribution: uniform
+ min: 0.0
+ max: 10.0
+ perspective:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ flipud:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ fliplr:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mosaic:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mixup:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ copy_paste:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
diff --git a/yolov7_seg/det/utils/loggers/wandb/wandb_utils.py b/yolov7_seg/det/utils/loggers/wandb/wandb_utils.py
new file mode 100644
index 000000000..62dd457a6
--- /dev/null
+++ b/yolov7_seg/det/utils/loggers/wandb/wandb_utils.py
@@ -0,0 +1,584 @@
+"""Utilities and tools for tracking runs with Weights & Biases."""
+
+import logging
+import os
+import sys
+from contextlib import contextmanager
+from pathlib import Path
+from typing import Dict
+
+import yaml
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from utils.dataloaders import LoadImagesAndLabels, img2label_paths
+from utils.general import LOGGER, check_dataset, check_file
+
+try:
+ import wandb
+
+ assert hasattr(wandb, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ wandb = None
+
+RANK = int(os.getenv('RANK', -1))
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):
+ return from_string[len(prefix):]
+
+
+def check_wandb_config_file(data_config_file):
+ wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path
+ if Path(wandb_config).is_file():
+ return wandb_config
+ return data_config_file
+
+
+def check_wandb_dataset(data_file):
+ is_trainset_wandb_artifact = False
+ is_valset_wandb_artifact = False
+ if isinstance(data_file, dict):
+ # In that case another dataset manager has already processed it and we don't have to
+ return data_file
+ if check_file(data_file) and data_file.endswith('.yaml'):
+ with open(data_file, errors='ignore') as f:
+ data_dict = yaml.safe_load(f)
+ is_trainset_wandb_artifact = isinstance(data_dict['train'],
+ str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX)
+ is_valset_wandb_artifact = isinstance(data_dict['val'],
+ str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX)
+ if is_trainset_wandb_artifact or is_valset_wandb_artifact:
+ return data_dict
+ else:
+ return check_dataset(data_file)
+
+
+def get_run_info(run_path):
+ run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))
+ run_id = run_path.stem
+ project = run_path.parent.stem
+ entity = run_path.parent.parent.stem
+ model_artifact_name = 'run_' + run_id + '_model'
+ return entity, project, run_id, model_artifact_name
+
+
+def check_wandb_resume(opt):
+ process_wandb_config_ddp_mode(opt) if RANK not in [-1, 0] else None
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ if RANK not in [-1, 0]: # For resuming DDP runs
+ entity, project, run_id, model_artifact_name = get_run_info(opt.resume)
+ api = wandb.Api()
+ artifact = api.artifact(entity + '/' + project + '/' + model_artifact_name + ':latest')
+ modeldir = artifact.download()
+ opt.weights = str(Path(modeldir) / "last.pt")
+ return True
+ return None
+
+
+def process_wandb_config_ddp_mode(opt):
+ with open(check_file(opt.data), errors='ignore') as f:
+ data_dict = yaml.safe_load(f) # data dict
+ train_dir, val_dir = None, None
+ if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)
+ train_dir = train_artifact.download()
+ train_path = Path(train_dir) / 'data/images/'
+ data_dict['train'] = str(train_path)
+
+ if isinstance(data_dict['val'], str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ val_artifact = api.artifact(remove_prefix(data_dict['val']) + ':' + opt.artifact_alias)
+ val_dir = val_artifact.download()
+ val_path = Path(val_dir) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ if train_dir or val_dir:
+ ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')
+ with open(ddp_data_path, 'w') as f:
+ yaml.safe_dump(data_dict, f)
+ opt.data = ddp_data_path
+
+
+class WandbLogger():
+ """Log training runs, datasets, models, and predictions to Weights & Biases.
+
+ This logger sends information to W&B at wandb.ai. By default, this information
+ includes hyperparameters, system configuration and metrics, model metrics,
+ and basic data metrics and analyses.
+
+ By providing additional command line arguments to train.py, datasets,
+ models and predictions can also be logged.
+
+ For more on how this logger is used, see the Weights & Biases documentation:
+ https://docs.wandb.com/guides/integrations/yolov5
+ """
+
+ def __init__(self, opt, run_id=None, job_type='Training'):
+ """
+ - Initialize WandbLogger instance
+ - Upload dataset if opt.upload_dataset is True
+ - Setup training processes if job_type is 'Training'
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ run_id (str) -- Run ID of W&B run to be resumed
+ job_type (str) -- To set the job_type for this run
+
+ """
+ # Pre-training routine --
+ self.job_type = job_type
+ self.wandb, self.wandb_run = wandb, None if not wandb else wandb.run
+ self.val_artifact, self.train_artifact = None, None
+ self.train_artifact_path, self.val_artifact_path = None, None
+ self.result_artifact = None
+ self.val_table, self.result_table = None, None
+ self.bbox_media_panel_images = []
+ self.val_table_path_map = None
+ self.max_imgs_to_log = 16
+ self.wandb_artifact_data_dict = None
+ self.data_dict = None
+ # It's more elegant to stick to 1 wandb.init call,
+ # but useful config data is overwritten in the WandbLogger's wandb.init call
+ if isinstance(opt.resume, str): # checks resume from artifact
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ entity, project, run_id, model_artifact_name = get_run_info(opt.resume)
+ model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name
+ assert wandb, 'install wandb to resume wandb runs'
+ # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config
+ self.wandb_run = wandb.init(id=run_id,
+ project=project,
+ entity=entity,
+ resume='allow',
+ allow_val_change=True)
+ opt.resume = model_artifact_name
+ elif self.wandb:
+ self.wandb_run = wandb.init(config=opt,
+ resume="allow",
+ project='YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem,
+ entity=opt.entity,
+ name=opt.name if opt.name != 'exp' else None,
+ job_type=job_type,
+ id=run_id,
+ allow_val_change=True) if not wandb.run else wandb.run
+ if self.wandb_run:
+ if self.job_type == 'Training':
+ if opt.upload_dataset:
+ if not opt.resume:
+ self.wandb_artifact_data_dict = self.check_and_upload_dataset(opt)
+
+ if isinstance(opt.data, dict):
+ # This means another dataset manager has already processed the dataset info (e.g. ClearML)
+ # and they will have stored the already processed dict in opt.data
+ self.data_dict = opt.data
+ elif opt.resume:
+ # resume from artifact
+ if isinstance(opt.resume, str) and opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ self.data_dict = dict(self.wandb_run.config.data_dict)
+ else: # local resume
+ self.data_dict = check_wandb_dataset(opt.data)
+ else:
+ self.data_dict = check_wandb_dataset(opt.data)
+ self.wandb_artifact_data_dict = self.wandb_artifact_data_dict or self.data_dict
+
+ # write data_dict to config. useful for resuming from artifacts. Do this only when not resuming.
+ self.wandb_run.config.update({'data_dict': self.wandb_artifact_data_dict}, allow_val_change=True)
+ self.setup_training(opt)
+
+ if self.job_type == 'Dataset Creation':
+ self.wandb_run.config.update({"upload_dataset": True})
+ self.data_dict = self.check_and_upload_dataset(opt)
+
+ def check_and_upload_dataset(self, opt):
+ """
+ Check if the dataset format is compatible and upload it as W&B artifact
+
+ arguments:
+ opt (namespace)-- Commandline arguments for current run
+
+ returns:
+ Updated dataset info dictionary where local dataset paths are replaced by WAND_ARFACT_PREFIX links.
+ """
+ assert wandb, 'Install wandb to upload dataset'
+ config_path = self.log_dataset_artifact(opt.data, opt.single_cls,
+ 'YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem)
+ with open(config_path, errors='ignore') as f:
+ wandb_data_dict = yaml.safe_load(f)
+ return wandb_data_dict
+
+ def setup_training(self, opt):
+ """
+ Setup the necessary processes for training YOLO models:
+ - Attempt to download model checkpoint and dataset artifacts if opt.resume stats with WANDB_ARTIFACT_PREFIX
+ - Update data_dict, to contain info of previous run if resumed and the paths of dataset artifact if downloaded
+ - Setup log_dict, initialize bbox_interval
+
+ arguments:
+ opt (namespace) -- commandline arguments for this run
+
+ """
+ self.log_dict, self.current_epoch = {}, 0
+ self.bbox_interval = opt.bbox_interval
+ if isinstance(opt.resume, str):
+ modeldir, _ = self.download_model_artifact(opt)
+ if modeldir:
+ self.weights = Path(modeldir) / "last.pt"
+ config = self.wandb_run.config
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp, opt.imgsz = str(
+ self.weights), config.save_period, config.batch_size, config.bbox_interval, config.epochs,\
+ config.hyp, config.imgsz
+ data_dict = self.data_dict
+ if self.val_artifact is None: # If --upload_dataset is set, use the existing artifact, don't download
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(
+ data_dict.get('train'), opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(
+ data_dict.get('val'), opt.artifact_alias)
+
+ if self.train_artifact_path is not None:
+ train_path = Path(self.train_artifact_path) / 'data/images/'
+ data_dict['train'] = str(train_path)
+ if self.val_artifact_path is not None:
+ val_path = Path(self.val_artifact_path) / 'data/images/'
+ data_dict['val'] = str(val_path)
+
+ if self.val_artifact is not None:
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+ columns = ["epoch", "id", "ground truth", "prediction"]
+ columns.extend(self.data_dict['names'])
+ self.result_table = wandb.Table(columns)
+ self.val_table = self.val_artifact.get("val")
+ if self.val_table_path_map is None:
+ self.map_val_table_path()
+ if opt.bbox_interval == -1:
+ self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ if opt.evolve or opt.noplots:
+ self.bbox_interval = opt.bbox_interval = opt.epochs + 1 # disable bbox_interval
+ train_from_artifact = self.train_artifact_path is not None and self.val_artifact_path is not None
+ # Update the the data_dict to point to local artifacts dir
+ if train_from_artifact:
+ self.data_dict = data_dict
+
+ def download_dataset_artifact(self, path, alias):
+ """
+ download the model checkpoint artifact if the path starts with WANDB_ARTIFACT_PREFIX
+
+ arguments:
+ path -- path of the dataset to be used for training
+ alias (str)-- alias of the artifact to be download/used for training
+
+ returns:
+ (str, wandb.Artifact) -- path of the downladed dataset and it's corresponding artifact object if dataset
+ is found otherwise returns (None, None)
+ """
+ if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):
+ artifact_path = Path(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + ":" + alias)
+ dataset_artifact = wandb.use_artifact(artifact_path.as_posix().replace("\\", "/"))
+ assert dataset_artifact is not None, "'Error: W&B dataset artifact doesn\'t exist'"
+ datadir = dataset_artifact.download()
+ return datadir, dataset_artifact
+ return None, None
+
+ def download_model_artifact(self, opt):
+ """
+ download the model checkpoint artifact if the resume path starts with WANDB_ARTIFACT_PREFIX
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ """
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
+ assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
+ modeldir = model_artifact.download()
+ # epochs_trained = model_artifact.metadata.get('epochs_trained')
+ total_epochs = model_artifact.metadata.get('total_epochs')
+ is_finished = total_epochs is None
+ assert not is_finished, 'training is finished, can only resume incomplete runs.'
+ return modeldir, model_artifact
+ return None, None
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ """
+ Log the model checkpoint as W&B artifact
+
+ arguments:
+ path (Path) -- Path of directory containing the checkpoints
+ opt (namespace) -- Command line arguments for this run
+ epoch (int) -- Current epoch number
+ fitness_score (float) -- fitness score for current epoch
+ best_model (boolean) -- Boolean representing if the current checkpoint is the best yet.
+ """
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model',
+ type='model',
+ metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score})
+ model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
+ wandb.log_artifact(model_artifact,
+ aliases=['latest', 'last', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
+ LOGGER.info(f"Saving model artifact on epoch {epoch + 1}")
+
+ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):
+ """
+ Log the dataset as W&B artifact and return the new data file with W&B links
+
+ arguments:
+ data_file (str) -- the .yaml file with information about the dataset like - path, classes etc.
+ single_class (boolean) -- train multi-class data as single-class
+ project (str) -- project name. Used to construct the artifact path
+ overwrite_config (boolean) -- overwrites the data.yaml file if set to true otherwise creates a new
+ file with _wandb postfix. Eg -> data_wandb.yaml
+
+ returns:
+ the new .yaml file with artifact links. it can be used to start training directly from artifacts
+ """
+ upload_dataset = self.wandb_run.config.upload_dataset
+ log_val_only = isinstance(upload_dataset, str) and upload_dataset == 'val'
+ self.data_dict = check_dataset(data_file) # parse and check
+ data = dict(self.data_dict)
+ nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])
+ names = {k: v for k, v in enumerate(names)} # to index dictionary
+
+ # log train set
+ if not log_val_only:
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(data['train'], rect=True, batch_size=1),
+ names,
+ name='train') if data.get('train') else None
+ if data.get('train'):
+ data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
+
+ self.val_artifact = self.create_dataset_table(
+ LoadImagesAndLabels(data['val'], rect=True, batch_size=1), names, name='val') if data.get('val') else None
+ if data.get('val'):
+ data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
+
+ path = Path(data_file)
+ # create a _wandb.yaml file with artifacts links if both train and test set are logged
+ if not log_val_only:
+ path = (path.stem if overwrite_config else path.stem + '_wandb') + '.yaml' # updated data.yaml path
+ path = ROOT / 'data' / path
+ data.pop('download', None)
+ data.pop('path', None)
+ with open(path, 'w') as f:
+ yaml.safe_dump(data, f)
+ LOGGER.info(f"Created dataset config file {path}")
+
+ if self.job_type == 'Training': # builds correct artifact pipeline graph
+ if not log_val_only:
+ self.wandb_run.log_artifact(
+ self.train_artifact) # calling use_artifact downloads the dataset. NOT NEEDED!
+ self.wandb_run.use_artifact(self.val_artifact)
+ self.val_artifact.wait()
+ self.val_table = self.val_artifact.get('val')
+ self.map_val_table_path()
+ else:
+ self.wandb_run.log_artifact(self.train_artifact)
+ self.wandb_run.log_artifact(self.val_artifact)
+ return path
+
+ def map_val_table_path(self):
+ """
+ Map the validation dataset Table like name of file -> it's id in the W&B Table.
+ Useful for - referencing artifacts for evaluation.
+ """
+ self.val_table_path_map = {}
+ LOGGER.info("Mapping dataset")
+ for i, data in enumerate(tqdm(self.val_table.data)):
+ self.val_table_path_map[data[3]] = data[0]
+
+ def create_dataset_table(self, dataset: LoadImagesAndLabels, class_to_id: Dict[int, str], name: str = 'dataset'):
+ """
+ Create and return W&B artifact containing W&B Table of the dataset.
+
+ arguments:
+ dataset -- instance of LoadImagesAndLabels class used to iterate over the data to build Table
+ class_to_id -- hash map that maps class ids to labels
+ name -- name of the artifact
+
+ returns:
+ dataset artifact to be logged or used
+ """
+ # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
+ artifact = wandb.Artifact(name=name, type="dataset")
+ img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
+ img_files = tqdm(dataset.im_files) if not img_files else img_files
+ for img_file in img_files:
+ if Path(img_file).is_dir():
+ artifact.add_dir(img_file, name='data/images')
+ labels_path = 'labels'.join(dataset.path.rsplit('images', 1))
+ artifact.add_dir(labels_path, name='data/labels')
+ else:
+ artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
+ label_file = Path(img2label_paths([img_file])[0])
+ artifact.add_file(str(label_file), name='data/labels/' +
+ label_file.name) if label_file.exists() else None
+ table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
+ for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
+ box_data, img_classes = [], {}
+ for cls, *xywh in labels[:, 1:].tolist():
+ cls = int(cls)
+ box_data.append({
+ "position": {
+ "middle": [xywh[0], xywh[1]],
+ "width": xywh[2],
+ "height": xywh[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls])})
+ img_classes[cls] = class_to_id[cls]
+ boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
+ table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), list(img_classes.values()),
+ Path(paths).name)
+ artifact.add(table, name)
+ return artifact
+
+ def log_training_progress(self, predn, path, names):
+ """
+ Build evaluation Table. Uses reference from validation dataset table.
+
+ arguments:
+ predn (list): list of predictions in the native space in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ path (str): local path of the current evaluation image
+ names (dict(int, str)): hash map that maps class ids to labels
+ """
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])
+ box_data = []
+ avg_conf_per_class = [0] * len(self.data_dict['names'])
+ pred_class_count = {}
+ for *xyxy, conf, cls in predn.tolist():
+ if conf >= 0.25:
+ cls = int(cls)
+ box_data.append({
+ "position": {
+ "minX": xyxy[0],
+ "minY": xyxy[1],
+ "maxX": xyxy[2],
+ "maxY": xyxy[3]},
+ "class_id": cls,
+ "box_caption": f"{names[cls]} {conf:.3f}",
+ "scores": {
+ "class_score": conf},
+ "domain": "pixel"})
+ avg_conf_per_class[cls] += conf
+
+ if cls in pred_class_count:
+ pred_class_count[cls] += 1
+ else:
+ pred_class_count[cls] = 1
+
+ for pred_class in pred_class_count.keys():
+ avg_conf_per_class[pred_class] = avg_conf_per_class[pred_class] / pred_class_count[pred_class]
+
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ id = self.val_table_path_map[Path(path).name]
+ self.result_table.add_data(self.current_epoch, id, self.val_table.data[id][1],
+ wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
+ *avg_conf_per_class)
+
+ def val_one_image(self, pred, predn, path, names, im):
+ """
+ Log validation data for one image. updates the result Table if validation dataset is uploaded and log bbox media panel
+
+ arguments:
+ pred (list): list of scaled predictions in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ predn (list): list of predictions in the native space - [xmin, ymin, xmax, ymax, confidence, class]
+ path (str): local path of the current evaluation image
+ """
+ if self.val_table and self.result_table: # Log Table if Val dataset is uploaded as artifact
+ self.log_training_progress(predn, path, names)
+
+ if len(self.bbox_media_panel_images) < self.max_imgs_to_log and self.current_epoch > 0:
+ if self.current_epoch % self.bbox_interval == 0:
+ box_data = [{
+ "position": {
+ "minX": xyxy[0],
+ "minY": xyxy[1],
+ "maxX": xyxy[2],
+ "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": f"{names[int(cls)]} {conf:.3f}",
+ "scores": {
+ "class_score": conf},
+ "domain": "pixel"} for *xyxy, conf, cls in pred.tolist()]
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ self.bbox_media_panel_images.append(wandb.Image(im, boxes=boxes, caption=path.name))
+
+ def log(self, log_dict):
+ """
+ save the metrics to the logging dictionary
+
+ arguments:
+ log_dict (Dict) -- metrics/media to be logged in current step
+ """
+ if self.wandb_run:
+ for key, value in log_dict.items():
+ self.log_dict[key] = value
+
+ def end_epoch(self, best_result=False):
+ """
+ commit the log_dict, model artifacts and Tables to W&B and flush the log_dict.
+
+ arguments:
+ best_result (boolean): Boolean representing if the result of this evaluation is best or not
+ """
+ if self.wandb_run:
+ with all_logging_disabled():
+ if self.bbox_media_panel_images:
+ self.log_dict["BoundingBoxDebugger"] = self.bbox_media_panel_images
+ try:
+ wandb.log(self.log_dict)
+ except BaseException as e:
+ LOGGER.info(
+ f"An error occurred in wandb logger. The training will proceed without interruption. More info\n{e}"
+ )
+ self.wandb_run.finish()
+ self.wandb_run = None
+
+ self.log_dict = {}
+ self.bbox_media_panel_images = []
+ if self.result_artifact:
+ self.result_artifact.add(self.result_table, 'result')
+ wandb.log_artifact(self.result_artifact,
+ aliases=[
+ 'latest', 'last', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
+
+ wandb.log({"evaluation": self.result_table})
+ columns = ["epoch", "id", "ground truth", "prediction"]
+ columns.extend(self.data_dict['names'])
+ self.result_table = wandb.Table(columns)
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+
+ def finish_run(self):
+ """
+ Log metrics if any and finish the current W&B run
+ """
+ if self.wandb_run:
+ if self.log_dict:
+ with all_logging_disabled():
+ wandb.log(self.log_dict)
+ wandb.run.finish()
+
+
+@contextmanager
+def all_logging_disabled(highest_level=logging.CRITICAL):
+ """ source - https://gist.github.com/simon-weber/7853144
+ A context manager that will prevent any logging messages triggered during the body from being processed.
+ :param highest_level: the maximum logging level in use.
+ This would only need to be changed if a custom level greater than CRITICAL is defined.
+ """
+ previous_level = logging.root.manager.disable
+ logging.disable(highest_level)
+ try:
+ yield
+ finally:
+ logging.disable(previous_level)
diff --git a/yolov7_seg/det/utils/loss.py b/yolov7_seg/det/utils/loss.py
new file mode 100644
index 000000000..2d42acd03
--- /dev/null
+++ b/yolov7_seg/det/utils/loss.py
@@ -0,0 +1,234 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Loss functions
+"""
+
+import torch
+import torch.nn as nn
+
+from utils.metrics import bbox_iou
+from utils.torch_utils import de_parallel
+
+
+def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
+ # return positive, negative label smoothing BCE targets
+ return 1.0 - 0.5 * eps, 0.5 * eps
+
+
+class BCEBlurWithLogitsLoss(nn.Module):
+ # BCEwithLogitLoss() with reduced missing label effects.
+ def __init__(self, alpha=0.05):
+ super().__init__()
+ self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
+ self.alpha = alpha
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ pred = torch.sigmoid(pred) # prob from logits
+ dx = pred - true # reduce only missing label effects
+ # dx = (pred - true).abs() # reduce missing label and false label effects
+ alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
+ loss *= alpha_factor
+ return loss.mean()
+
+
+class FocalLoss(nn.Module):
+ # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super().__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ # p_t = torch.exp(-loss)
+ # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
+
+ # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = (1.0 - p_t) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class QFocalLoss(nn.Module):
+ # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super().__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = torch.abs(true - pred_prob) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class ComputeLoss:
+ sort_obj_iou = False
+
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ m = de_parallel(model).model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
+ self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
+ self.na = m.na # number of anchors
+ self.nc = m.nc # number of classes
+ self.nl = m.nl # number of layers
+ self.anchors = m.anchors
+ self.device = device
+
+ def __call__(self, p, targets): # predictions, targets
+ lcls = torch.zeros(1, device=self.device) # class loss
+ lbox = torch.zeros(1, device=self.device) # box loss
+ lobj = torch.zeros(1, device=self.device) # object loss
+ tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ # pxy, pwh, _, pcls = pi[b, a, gj, gi].tensor_split((2, 4, 5), dim=1) # faster, requires torch 1.8.0
+ pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions
+
+ # Regression
+ pxy = pxy.sigmoid() * 2 - 0.5
+ pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ iou = iou.detach().clamp(0).type(tobj.dtype)
+ if self.sort_obj_iou:
+ j = iou.argsort()
+ b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
+ if self.gr < 1:
+ iou = (1.0 - self.gr) + self.gr * iou
+ tobj[b, a, gj, gi] = iou # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(pcls, self.cn, device=self.device) # targets
+ t[range(n), tcls[i]] = self.cp
+ lcls += self.BCEcls(pcls, t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch = [], [], [], []
+ gain = torch.ones(7, device=self.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor(
+ [
+ [0, 0],
+ [1, 0],
+ [0, 1],
+ [-1, 0],
+ [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ],
+ device=self.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors, shape = self.anchors[i], p[i].shape
+ gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain # shape(3,n,7)
+ if nt:
+ # Matches
+ r = t[..., 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1 < g) & (gxy > 1)).T
+ l, m = ((gxi % 1 < g) & (gxi > 1)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ bc, gxy, gwh, a = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
+ a, (b, c) = a.long().view(-1), bc.long().T # anchors, image, class
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid indices
+
+ # Append
+ indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+
+ return tcls, tbox, indices, anch
diff --git a/yolov7_seg/det/utils/metrics.py b/yolov7_seg/det/utils/metrics.py
new file mode 100644
index 000000000..f1c38db56
--- /dev/null
+++ b/yolov7_seg/det/utils/metrics.py
@@ -0,0 +1,364 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Model validation metrics
+"""
+
+import math
+import warnings
+from pathlib import Path
+
+import matplotlib.pyplot as plt
+import numpy as np
+import torch
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
+ return (x[:, :4] * w).sum(1)
+
+
+def smooth(y, f=0.05):
+ # Box filter of fraction f
+ nf = round(len(y) * f * 2) // 2 + 1 # number of filter elements (must be odd)
+ p = np.ones(nf // 2) # ones padding
+ yp = np.concatenate((p * y[0], y, p * y[-1]), 0) # y padded
+ return np.convolve(yp, np.ones(nf) / nf, mode='valid') # y-smoothed
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16):
+ """ Compute the average precision, given the recall and precision curves.
+ Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
+ # Arguments
+ tp: True positives (nparray, nx1 or nx10).
+ conf: Objectness value from 0-1 (nparray).
+ pred_cls: Predicted object classes (nparray).
+ target_cls: True object classes (nparray).
+ plot: Plot precision-recall curve at mAP@0.5
+ save_dir: Plot save directory
+ # Returns
+ The average precision as computed in py-faster-rcnn.
+ """
+
+ # Sort by objectness
+ i = np.argsort(-conf)
+ tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
+
+ # Find unique classes
+ unique_classes, nt = np.unique(target_cls, return_counts=True)
+ nc = unique_classes.shape[0] # number of classes, number of detections
+
+ # Create Precision-Recall curve and compute AP for each class
+ px, py = np.linspace(0, 1, 1000), [] # for plotting
+ ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
+ for ci, c in enumerate(unique_classes):
+ i = pred_cls == c
+ n_l = nt[ci] # number of labels
+ n_p = i.sum() # number of predictions
+ if n_p == 0 or n_l == 0:
+ continue
+
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + eps) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+
+ # Compute F1 (harmonic mean of precision and recall)
+ f1 = 2 * p * r / (p + r + eps)
+ names = [v for k, v in names.items() if k in unique_classes] # list: only classes that have data
+ names = dict(enumerate(names)) # to dict
+ if plot:
+ plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')
+
+ i = smooth(f1.mean(0), 0.1).argmax() # max F1 index
+ p, r, f1 = p[:, i], r[:, i], f1[:, i]
+ tp = (r * nt).round() # true positives
+ fp = (tp / (p + eps) - tp).round() # false positives
+ return tp, fp, p, r, f1, ap, unique_classes.astype(int)
+
+
+def compute_ap(recall, precision):
+ """ Compute the average precision, given the recall and precision curves
+ # Arguments
+ recall: The recall curve (list)
+ precision: The precision curve (list)
+ # Returns
+ Average precision, precision curve, recall curve
+ """
+
+ # Append sentinel values to beginning and end
+ mrec = np.concatenate(([0.0], recall, [1.0]))
+ mpre = np.concatenate(([1.0], precision, [0.0]))
+
+ # Compute the precision envelope
+ mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
+
+ # Integrate area under curve
+ method = 'interp' # methods: 'continuous', 'interp'
+ if method == 'interp':
+ x = np.linspace(0, 1, 101) # 101-point interp (COCO)
+ ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
+ else: # 'continuous'
+ i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
+ ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
+
+ return ap, mpre, mrec
+
+
+class ConfusionMatrix:
+ # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
+ def __init__(self, nc, conf=0.25, iou_thres=0.45):
+ self.matrix = np.zeros((nc + 1, nc + 1))
+ self.nc = nc # number of classes
+ self.conf = conf
+ self.iou_thres = iou_thres
+
+ def process_batch(self, detections, labels):
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ None, updates confusion matrix accordingly
+ """
+ if detections is None:
+ gt_classes = labels.int()
+ for i, gc in enumerate(gt_classes):
+ self.matrix[self.nc, gc] += 1 # background FN
+ return
+
+ detections = detections[detections[:, 4] > self.conf]
+ gt_classes = labels[:, 0].int()
+ detection_classes = detections[:, 5].int()
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+
+ x = torch.where(iou > self.iou_thres)
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ else:
+ matches = np.zeros((0, 3))
+
+ n = matches.shape[0] > 0
+ m0, m1, _ = matches.transpose().astype(int)
+ for i, gc in enumerate(gt_classes):
+ j = m0 == i
+ if n and sum(j) == 1:
+ self.matrix[detection_classes[m1[j]], gc] += 1 # correct
+ else:
+ self.matrix[self.nc, gc] += 1 # background FP
+
+ if n:
+ for i, dc in enumerate(detection_classes):
+ if not any(m1 == i):
+ self.matrix[dc, self.nc] += 1 # background FN
+
+ def matrix(self):
+ return self.matrix
+
+ def tp_fp(self):
+ tp = self.matrix.diagonal() # true positives
+ fp = self.matrix.sum(1) - tp # false positives
+ # fn = self.matrix.sum(0) - tp # false negatives (missed detections)
+ return tp[:-1], fp[:-1] # remove background class
+
+ def plot(self, normalize=True, save_dir='', names=()):
+ try:
+ import seaborn as sn
+
+ array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-9) if normalize else 1) # normalize columns
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig = plt.figure(figsize=(12, 9), tight_layout=True)
+ nc, nn = self.nc, len(names) # number of classes, names
+ sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size
+ labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
+ sn.heatmap(array,
+ annot=nc < 30,
+ annot_kws={
+ "size": 8},
+ cmap='Blues',
+ fmt='.2f',
+ square=True,
+ vmin=0.0,
+ xticklabels=names + ['background FP'] if labels else "auto",
+ yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
+ fig.axes[0].set_xlabel('True')
+ fig.axes[0].set_ylabel('Predicted')
+ plt.title('Confusion Matrix')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ plt.close()
+ except Exception as e:
+ print(f'WARNING: ConfusionMatrix plot failure: {e}')
+
+ def print(self):
+ for i in range(self.nc + 1):
+ print(' '.join(map(str, self.matrix[i])))
+
+
+def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)
+
+ # Get the coordinates of bounding boxes
+ if xywh: # transform from xywh to xyxy
+ (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, 1), box2.chunk(4, 1)
+ w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
+ b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
+ b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
+ else: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, 1)
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, 1)
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ # IoU
+ iou = inter / union
+ if CIoU or DIoU or GIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2
+ if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
+ with torch.no_grad():
+ alpha = v / (v - iou + (1 + eps))
+ return iou - (rho2 / c2 + v * alpha) # CIoU
+ return iou - rho2 / c2 # DIoU
+ c_area = cw * ch + eps # convex area
+ return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ return iou # IoU
+
+
+def box_area(box):
+ # box = xyxy(4,n)
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+
+def box_iou(box1, box2, eps=1e-7):
+ # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ box1 (Tensor[N, 4])
+ box2 (Tensor[M, 4])
+ Returns:
+ iou (Tensor[N, M]): the NxM matrix containing the pairwise
+ IoU values for every element in boxes1 and boxes2
+ """
+
+ # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
+ (a1, a2), (b1, b2) = box1[:, None].chunk(2, 2), box2.chunk(2, 1)
+ inter = (torch.min(a2, b2) - torch.max(a1, b1)).clamp(0).prod(2)
+
+ # IoU = inter / (area1 + area2 - inter)
+ return inter / (box_area(box1.T)[:, None] + box_area(box2.T) - inter + eps)
+
+
+def bbox_ioa(box1, box2, eps=1e-7):
+ """ Returns the intersection over box2 area given box1, box2. Boxes are x1y1x2y2
+ box1: np.array of shape(4)
+ box2: np.array of shape(nx4)
+ returns: np.array of shape(n)
+ """
+
+ # Get the coordinates of bounding boxes
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.T
+
+ # Intersection area
+ inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
+ (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)
+
+ # box2 area
+ box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + eps
+
+ # Intersection over box2 area
+ return inter_area / box2_area
+
+
+def wh_iou(wh1, wh2, eps=1e-7):
+ # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
+ wh1 = wh1[:, None] # [N,1,2]
+ wh2 = wh2[None] # [1,M,2]
+ inter = torch.min(wh1, wh2).prod(2) # [N,M]
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter + eps) # iou = inter / (area1 + area2 - inter)
+
+
+# Plots ----------------------------------------------------------------------------------------------------------------
+
+
+def plot_pr_curve(px, py, ap, save_dir=Path('pr_curve.png'), names=()):
+ # Precision-recall curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+ py = np.stack(py, axis=1)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py.T):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)
+ else:
+ ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)
+
+ ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())
+ ax.set_xlabel('Recall')
+ ax.set_ylabel('Precision')
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ plt.title('Precision-Recall Curve')
+ fig.savefig(save_dir, dpi=250)
+ plt.close()
+
+
+def plot_mc_curve(px, py, save_dir=Path('mc_curve.png'), names=(), xlabel='Confidence', ylabel='Metric'):
+ # Metric-confidence curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)
+ else:
+ ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
+
+ y = smooth(py.mean(0), 0.05)
+ ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
+ ax.set_xlabel(xlabel)
+ ax.set_ylabel(ylabel)
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ plt.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ plt.title(f'{ylabel}-Confidence Curve')
+ fig.savefig(save_dir, dpi=250)
+ plt.close()
diff --git a/yolov7_seg/det/utils/plots.py b/yolov7_seg/det/utils/plots.py
new file mode 100644
index 000000000..1fe154883
--- /dev/null
+++ b/yolov7_seg/det/utils/plots.py
@@ -0,0 +1,519 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Plotting utils
+"""
+
+import math
+import os
+from copy import copy
+from pathlib import Path
+from urllib.error import URLError
+
+import cv2
+import matplotlib
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import seaborn as sn
+import torch
+from PIL import Image, ImageDraw, ImageFont
+
+from utils.general import (CONFIG_DIR, FONT, LOGGER, Timeout, check_font, check_requirements, clip_coords,
+ increment_path, is_ascii, threaded, try_except, xywh2xyxy, xyxy2xywh)
+from utils.metrics import fitness
+
+# Settings
+RANK = int(os.getenv('RANK', -1))
+matplotlib.rc('font', **{'size': 11})
+matplotlib.use('Agg') # for writing to files only
+
+
+class Colors:
+ # Ultralytics color palette https://ultralytics.com/
+ def __init__(self):
+ # hex = matplotlib.colors.TABLEAU_COLORS.values()
+ hexs = ('FF3838', 'FF9D97', 'FF701F', 'FFB21D', 'CFD231', '48F90A', '92CC17', '3DDB86', '1A9334', '00D4BB',
+ '2C99A8', '00C2FF', '344593', '6473FF', '0018EC', '8438FF', '520085', 'CB38FF', 'FF95C8', 'FF37C7')
+ self.palette = [self.hex2rgb(f'#{c}') for c in hexs]
+ self.n = len(self.palette)
+
+ def __call__(self, i, bgr=False):
+ c = self.palette[int(i) % self.n]
+ return (c[2], c[1], c[0]) if bgr else c
+
+ @staticmethod
+ def hex2rgb(h): # rgb order (PIL)
+ return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))
+
+
+colors = Colors() # create instance for 'from utils.plots import colors'
+
+
+def check_pil_font(font=FONT, size=10):
+ # Return a PIL TrueType Font, downloading to CONFIG_DIR if necessary
+ font = Path(font)
+ font = font if font.exists() else (CONFIG_DIR / font.name)
+ try:
+ return ImageFont.truetype(str(font) if font.exists() else font.name, size)
+ except Exception: # download if missing
+ try:
+ check_font(font)
+ return ImageFont.truetype(str(font), size)
+ except TypeError:
+ check_requirements('Pillow>=8.4.0') # known issue https://github.com/ultralytics/yolov5/issues/5374
+ except URLError: # not online
+ return ImageFont.load_default()
+
+
+class Annotator:
+ # YOLOv5 Annotator for train/val mosaics and jpgs and detect/hub inference annotations
+ def __init__(self, im, line_width=None, font_size=None, font='Arial.ttf', pil=False, example='abc'):
+ assert im.data.contiguous, 'Image not contiguous. Apply np.ascontiguousarray(im) to Annotator() input images.'
+ non_ascii = not is_ascii(example) # non-latin labels, i.e. asian, arabic, cyrillic
+ self.pil = pil or non_ascii
+ if self.pil: # use PIL
+ self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
+ self.draw = ImageDraw.Draw(self.im)
+ self.font = check_pil_font(font='Arial.Unicode.ttf' if non_ascii else font,
+ size=font_size or max(round(sum(self.im.size) / 2 * 0.035), 12))
+ else: # use cv2
+ self.im = im
+ self.lw = line_width or max(round(sum(im.shape) / 2 * 0.003), 2) # line width
+
+ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 255)):
+ # Add one xyxy box to image with label
+ if self.pil or not is_ascii(label):
+ self.draw.rectangle(box, width=self.lw, outline=color) # box
+ if label:
+ w, h = self.font.getsize(label) # text width, height
+ outside = box[1] - h >= 0 # label fits outside box
+ self.draw.rectangle(
+ (box[0], box[1] - h if outside else box[1], box[0] + w + 1,
+ box[1] + 1 if outside else box[1] + h + 1),
+ fill=color,
+ )
+ # self.draw.text((box[0], box[1]), label, fill=txt_color, font=self.font, anchor='ls') # for PIL>8.0
+ self.draw.text((box[0], box[1] - h if outside else box[1]), label, fill=txt_color, font=self.font)
+ else: # cv2
+ p1, p2 = (int(box[0]), int(box[1])), (int(box[2]), int(box[3]))
+ cv2.rectangle(self.im, p1, p2, color, thickness=self.lw, lineType=cv2.LINE_AA)
+ if label:
+ tf = max(self.lw - 1, 1) # font thickness
+ w, h = cv2.getTextSize(label, 0, fontScale=self.lw / 3, thickness=tf)[0] # text width, height
+ outside = p1[1] - h >= 3
+ p2 = p1[0] + w, p1[1] - h - 3 if outside else p1[1] + h + 3
+ cv2.rectangle(self.im, p1, p2, color, -1, cv2.LINE_AA) # filled
+ cv2.putText(self.im,
+ label, (p1[0], p1[1] - 2 if outside else p1[1] + h + 2),
+ 0,
+ self.lw / 3,
+ txt_color,
+ thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ def rectangle(self, xy, fill=None, outline=None, width=1):
+ # Add rectangle to image (PIL-only)
+ self.draw.rectangle(xy, fill, outline, width)
+
+ def text(self, xy, text, txt_color=(255, 255, 255)):
+ # Add text to image (PIL-only)
+ w, h = self.font.getsize(text) # text width, height
+ self.draw.text((xy[0], xy[1] - h + 1), text, fill=txt_color, font=self.font)
+
+ def result(self):
+ # Return annotated image as array
+ return np.asarray(self.im)
+
+
+def feature_visualization(x, module_type, stage, n=32, save_dir=Path('runs/detect/exp')):
+ """
+ x: Features to be visualized
+ module_type: Module type
+ stage: Module stage within model
+ n: Maximum number of feature maps to plot
+ save_dir: Directory to save results
+ """
+ if 'Detect' not in module_type:
+ batch, channels, height, width = x.shape # batch, channels, height, width
+ if height > 1 and width > 1:
+ f = save_dir / f"stage{stage}_{module_type.split('.')[-1]}_features.png" # filename
+
+ blocks = torch.chunk(x[0].cpu(), channels, dim=0) # select batch index 0, block by channels
+ n = min(n, channels) # number of plots
+ fig, ax = plt.subplots(math.ceil(n / 8), 8, tight_layout=True) # 8 rows x n/8 cols
+ ax = ax.ravel()
+ plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze()) # cmap='gray'
+ ax[i].axis('off')
+
+ LOGGER.info(f'Saving {f}... ({n}/{channels})')
+ plt.title('Features')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ np.save(str(f.with_suffix('.npy')), x[0].cpu().numpy()) # npy save
+
+
+def hist2d(x, y, n=100):
+ # 2d histogram used in labels.png and evolve.png
+ xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
+ hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
+ xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
+ yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
+ return np.log(hist[xidx, yidx])
+
+
+def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
+ from scipy.signal import butter, filtfilt
+
+ # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
+ def butter_lowpass(cutoff, fs, order):
+ nyq = 0.5 * fs
+ normal_cutoff = cutoff / nyq
+ return butter(order, normal_cutoff, btype='low', analog=False)
+
+ b, a = butter_lowpass(cutoff, fs, order=order)
+ return filtfilt(b, a, data) # forward-backward filter
+
+
+def output_to_target(output):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]
+ targets = []
+ for i, o in enumerate(output):
+ for *box, conf, cls in o.cpu().numpy():
+ targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])
+ return np.array(targets)
+
+
+@threaded
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=1920, max_subplots=16):
+ # Plot image grid with labels
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+
+ # Build Image
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, im in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ im = im.transpose(1, 2, 0)
+ mosaic[y:y + h, x:x + w, :] = im
+
+ # Resize (optional)
+ scale = max_size / ns / max(h, w)
+ if scale < 1:
+ h = math.ceil(scale * h)
+ w = math.ceil(scale * w)
+ mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
+
+ # Annotate
+ fs = int((h + w) * ns * 0.01) # font size
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
+ for i in range(i + 1):
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
+ if paths:
+ annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ if len(targets) > 0:
+ ti = targets[targets[:, 0] == i] # image targets
+ boxes = xywh2xyxy(ti[:, 2:6]).T
+ classes = ti[:, 1].astype('int')
+ labels = ti.shape[1] == 6 # labels if no conf column
+ conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale < 1: # absolute coords need scale if image scales
+ boxes *= scale
+ boxes[[0, 2]] += x
+ boxes[[1, 3]] += y
+ for j, box in enumerate(boxes.T.tolist()):
+ cls = classes[j]
+ color = colors(cls)
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'
+ annotator.box_label(box, label, color=color)
+ annotator.im.save(fname) # save
+
+
+def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):
+ # Plot LR simulating training for full epochs
+ optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
+ y = []
+ for _ in range(epochs):
+ scheduler.step()
+ y.append(optimizer.param_groups[0]['lr'])
+ plt.plot(y, '.-', label='LR')
+ plt.xlabel('epoch')
+ plt.ylabel('LR')
+ plt.grid()
+ plt.xlim(0, epochs)
+ plt.ylim(0)
+ plt.savefig(Path(save_dir) / 'LR.png', dpi=200)
+ plt.close()
+
+
+def plot_val_txt(): # from utils.plots import *; plot_val()
+ # Plot val.txt histograms
+ x = np.loadtxt('val.txt', dtype=np.float32)
+ box = xyxy2xywh(x[:, :4])
+ cx, cy = box[:, 0], box[:, 1]
+
+ fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
+ ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
+ ax.set_aspect('equal')
+ plt.savefig('hist2d.png', dpi=300)
+
+ fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
+ ax[0].hist(cx, bins=600)
+ ax[1].hist(cy, bins=600)
+ plt.savefig('hist1d.png', dpi=200)
+
+
+def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
+ # Plot targets.txt histograms
+ x = np.loadtxt('targets.txt', dtype=np.float32).T
+ s = ['x targets', 'y targets', 'width targets', 'height targets']
+ fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(4):
+ ax[i].hist(x[i], bins=100, label=f'{x[i].mean():.3g} +/- {x[i].std():.3g}')
+ ax[i].legend()
+ ax[i].set_title(s[i])
+ plt.savefig('targets.jpg', dpi=200)
+
+
+def plot_val_study(file='', dir='', x=None): # from utils.plots import *; plot_val_study()
+ # Plot file=study.txt generated by val.py (or plot all study*.txt in dir)
+ save_dir = Path(file).parent if file else Path(dir)
+ plot2 = False # plot additional results
+ if plot2:
+ ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)[1].ravel()
+
+ fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
+ # for f in [save_dir / f'study_coco_{x}.txt' for x in ['yolov5n6', 'yolov5s6', 'yolov5m6', 'yolov5l6', 'yolov5x6']]:
+ for f in sorted(save_dir.glob('study*.txt')):
+ y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
+ x = np.arange(y.shape[1]) if x is None else np.array(x)
+ if plot2:
+ s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_preprocess (ms/img)', 't_inference (ms/img)', 't_NMS (ms/img)']
+ for i in range(7):
+ ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)
+ ax[i].set_title(s[i])
+
+ j = y[3].argmax() + 1
+ ax2.plot(y[5, 1:j],
+ y[3, 1:j] * 1E2,
+ '.-',
+ linewidth=2,
+ markersize=8,
+ label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
+
+ ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
+ 'k.-',
+ linewidth=2,
+ markersize=8,
+ alpha=.25,
+ label='EfficientDet')
+
+ ax2.grid(alpha=0.2)
+ ax2.set_yticks(np.arange(20, 60, 5))
+ ax2.set_xlim(0, 57)
+ ax2.set_ylim(25, 55)
+ ax2.set_xlabel('GPU Speed (ms/img)')
+ ax2.set_ylabel('COCO AP val')
+ ax2.legend(loc='lower right')
+ f = save_dir / 'study.png'
+ print(f'Saving {f}...')
+ plt.savefig(f, dpi=300)
+
+
+@try_except # known issue https://github.com/ultralytics/yolov5/issues/5395
+@Timeout(30) # known issue https://github.com/ultralytics/yolov5/issues/5611
+def plot_labels(labels, names=(), save_dir=Path('')):
+ # plot dataset labels
+ LOGGER.info(f"Plotting labels to {save_dir / 'labels.jpg'}... ")
+ c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
+ nc = int(c.max() + 1) # number of classes
+ x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])
+
+ # seaborn correlogram
+ sn.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
+ plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)
+ plt.close()
+
+ # matplotlib labels
+ matplotlib.use('svg') # faster
+ ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
+ y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
+ try: # color histogram bars by class
+ [y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # known issue #3195
+ except Exception:
+ pass
+ ax[0].set_ylabel('instances')
+ if 0 < len(names) < 30:
+ ax[0].set_xticks(range(len(names)))
+ ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ else:
+ ax[0].set_xlabel('classes')
+ sn.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
+ sn.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)
+
+ # rectangles
+ labels[:, 1:3] = 0.5 # center
+ labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
+ img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
+ for cls, *box in labels[:1000]:
+ ImageDraw.Draw(img).rectangle(box, width=1, outline=colors(cls)) # plot
+ ax[1].imshow(img)
+ ax[1].axis('off')
+
+ for a in [0, 1, 2, 3]:
+ for s in ['top', 'right', 'left', 'bottom']:
+ ax[a].spines[s].set_visible(False)
+
+ plt.savefig(save_dir / 'labels.jpg', dpi=200)
+ matplotlib.use('Agg')
+ plt.close()
+
+
+def imshow_cls(im, labels=None, pred=None, names=None, nmax=25, verbose=False, f=Path('images.jpg')):
+ # Show classification image grid with labels (optional) and predictions (optional)
+ from utils.augmentations import denormalize
+
+ names = names or [f'class{i}' for i in range(1000)]
+ blocks = torch.chunk(denormalize(im.clone()).cpu().float(), len(im),
+ dim=0) # select batch index 0, block by channels
+ n = min(len(blocks), nmax) # number of plots
+ m = min(8, round(n ** 0.5)) # 8 x 8 default
+ fig, ax = plt.subplots(math.ceil(n / m), m) # 8 rows x n/8 cols
+ ax = ax.ravel() if m > 1 else [ax]
+ # plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze().permute((1, 2, 0)).numpy().clip(0.0, 1.0))
+ ax[i].axis('off')
+ if labels is not None:
+ s = names[labels[i]] + (f'—{names[pred[i]]}' if pred is not None else '')
+ ax[i].set_title(s, fontsize=8, verticalalignment='top')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ if verbose:
+ LOGGER.info(f"Saving {f}")
+ if labels is not None:
+ LOGGER.info('True: ' + ' '.join(f'{names[i]:3s}' for i in labels[:nmax]))
+ if pred is not None:
+ LOGGER.info('Predicted:' + ' '.join(f'{names[i]:3s}' for i in pred[:nmax]))
+ return f
+
+
+def plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *; plot_evolve()
+ # Plot evolve.csv hyp evolution results
+ evolve_csv = Path(evolve_csv)
+ data = pd.read_csv(evolve_csv)
+ keys = [x.strip() for x in data.columns]
+ x = data.values
+ f = fitness(x)
+ j = np.argmax(f) # max fitness index
+ plt.figure(figsize=(10, 12), tight_layout=True)
+ matplotlib.rc('font', **{'size': 8})
+ print(f'Best results from row {j} of {evolve_csv}:')
+ for i, k in enumerate(keys[7:]):
+ v = x[:, 7 + i]
+ mu = v[j] # best single result
+ plt.subplot(6, 5, i + 1)
+ plt.scatter(v, f, c=hist2d(v, f, 20), cmap='viridis', alpha=.8, edgecolors='none')
+ plt.plot(mu, f.max(), 'k+', markersize=15)
+ plt.title(f'{k} = {mu:.3g}', fontdict={'size': 9}) # limit to 40 characters
+ if i % 5 != 0:
+ plt.yticks([])
+ print(f'{k:>15}: {mu:.3g}')
+ f = evolve_csv.with_suffix('.png') # filename
+ plt.savefig(f, dpi=200)
+ plt.close()
+ print(f'Saved {f}')
+
+
+def plot_results(file='path/to/results.csv', dir=''):
+ # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')
+ save_dir = Path(file).parent if file else Path(dir)
+ fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
+ ax = ax.ravel()
+ files = list(save_dir.glob('results*.csv'))
+ assert len(files), f'No results.csv files found in {save_dir.resolve()}, nothing to plot.'
+ for f in files:
+ try:
+ data = pd.read_csv(f)
+ s = [x.strip() for x in data.columns]
+ x = data.values[:, 0]
+ for i, j in enumerate([1, 2, 3, 4, 5, 8, 9, 10, 6, 7]):
+ y = data.values[:, j].astype('float')
+ # y[y == 0] = np.nan # don't show zero values
+ ax[i].plot(x, y, marker='.', label=f.stem, linewidth=2, markersize=8)
+ ax[i].set_title(s[j], fontsize=12)
+ # if j in [8, 9, 10]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ LOGGER.info(f'Warning: Plotting error for {f}: {e}')
+ ax[1].legend()
+ fig.savefig(save_dir / 'results.png', dpi=200)
+ plt.close()
+
+
+def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
+ # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()
+ ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
+ s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']
+ files = list(Path(save_dir).glob('frames*.txt'))
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
+ n = results.shape[1] # number of rows
+ x = np.arange(start, min(stop, n) if stop else n)
+ results = results[:, x]
+ t = (results[0] - results[0].min()) # set t0=0s
+ results[0] = x
+ for i, a in enumerate(ax):
+ if i < len(results):
+ label = labels[fi] if len(labels) else f.stem.replace('frames_', '')
+ a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)
+ a.set_title(s[i])
+ a.set_xlabel('time (s)')
+ # if fi == len(files) - 1:
+ # a.set_ylim(bottom=0)
+ for side in ['top', 'right']:
+ a.spines[side].set_visible(False)
+ else:
+ a.remove()
+ except Exception as e:
+ print(f'Warning: Plotting error for {f}; {e}')
+ ax[1].legend()
+ plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
+
+
+def save_one_box(xyxy, im, file=Path('im.jpg'), gain=1.02, pad=10, square=False, BGR=False, save=True):
+ # Save image crop as {file} with crop size multiple {gain} and {pad} pixels. Save and/or return crop
+ xyxy = torch.tensor(xyxy).view(-1, 4)
+ b = xyxy2xywh(xyxy) # boxes
+ if square:
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # attempt rectangle to square
+ b[:, 2:] = b[:, 2:] * gain + pad # box wh * gain + pad
+ xyxy = xywh2xyxy(b).long()
+ clip_coords(xyxy, im.shape)
+ crop = im[int(xyxy[0, 1]):int(xyxy[0, 3]), int(xyxy[0, 0]):int(xyxy[0, 2]), ::(1 if BGR else -1)]
+ if save:
+ file.parent.mkdir(parents=True, exist_ok=True) # make directory
+ f = str(increment_path(file).with_suffix('.jpg'))
+ # cv2.imwrite(f, crop) # save BGR, https://github.com/ultralytics/yolov5/issues/7007 chroma subsampling issue
+ Image.fromarray(crop[..., ::-1]).save(f, quality=95, subsampling=0) # save RGB
+ return crop
diff --git a/yolov7_seg/det/utils/torch_utils.py b/yolov7_seg/det/utils/torch_utils.py
new file mode 100644
index 000000000..9b71bec7a
--- /dev/null
+++ b/yolov7_seg/det/utils/torch_utils.py
@@ -0,0 +1,444 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+PyTorch utils
+"""
+
+import math
+import os
+import platform
+import subprocess
+import time
+import warnings
+from contextlib import contextmanager
+from copy import deepcopy
+from pathlib import Path
+
+import torch
+import torch.distributed as dist
+import torch.nn as nn
+import torch.nn.functional as F
+from torch.nn.parallel import DistributedDataParallel as DDP
+
+from utils.general import LOGGER, check_version, colorstr, file_date, git_describe
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+try:
+ import thop # for FLOPs computation
+except ImportError:
+ thop = None
+
+# Suppress PyTorch warnings
+warnings.filterwarnings('ignore', message='User provided device_type of \'cuda\', but CUDA is not available. Disabling')
+
+
+def smart_inference_mode(torch_1_9=check_version(torch.__version__, '1.9.0')):
+ # Applies torch.inference_mode() decorator if torch>=1.9.0 else torch.no_grad() decorator
+ def decorate(fn):
+ return (torch.inference_mode if torch_1_9 else torch.no_grad)()(fn)
+
+ return decorate
+
+
+def smartCrossEntropyLoss(label_smoothing=0.0):
+ # Returns nn.CrossEntropyLoss with label smoothing enabled for torch>=1.10.0
+ if check_version(torch.__version__, '1.10.0'):
+ return nn.CrossEntropyLoss(label_smoothing=label_smoothing) # loss function
+ else:
+ if label_smoothing > 0:
+ LOGGER.warning(f'WARNING: label smoothing {label_smoothing} requires torch>=1.10.0')
+ return nn.CrossEntropyLoss() # loss function
+
+
+def smart_DDP(model):
+ # Model DDP creation with checks
+ assert not check_version(torch.__version__, '1.12.0', pinned=True), \
+ 'torch==1.12.0 torchvision==0.13.0 DDP training is not supported due to a known issue. ' \
+ 'Please upgrade or downgrade torch to use DDP. See https://github.com/ultralytics/yolov5/issues/8395'
+ if check_version(torch.__version__, '1.11.0'):
+ return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK, static_graph=True)
+ else:
+ return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK)
+
+
+def reshape_classifier_output(model, n=1000):
+ # Update a TorchVision classification model to class count 'n' if required
+ from models.common import Classify
+ name, m = list((model.model if hasattr(model, 'model') else model).named_children())[-1] # last module
+ if isinstance(m, Classify): # YOLOv5 Classify() head
+ if m.linear.out_features != n:
+ m.linear = nn.Linear(m.linear.in_features, n)
+ elif isinstance(m, nn.Linear): # ResNet, EfficientNet
+ if m.out_features != n:
+ setattr(model, name, nn.Linear(m.in_features, n))
+ elif isinstance(m, nn.Sequential):
+ types = [type(x) for x in m]
+ if nn.Linear in types:
+ i = types.index(nn.Linear) # nn.Linear index
+ if m[i].out_features != n:
+ m[i] = nn.Linear(m[i].in_features, n)
+ elif nn.Conv2d in types:
+ i = types.index(nn.Conv2d) # nn.Conv2d index
+ if m[i].out_channels != n:
+ m[i] = nn.Conv2d(m[i].in_channels, n, m[i].kernel_size, m[i].stride, bias=m[i].bias)
+
+
+@contextmanager
+def torch_distributed_zero_first(local_rank: int):
+ # Decorator to make all processes in distributed training wait for each local_master to do something
+ if local_rank not in [-1, 0]:
+ dist.barrier(device_ids=[local_rank])
+ yield
+ if local_rank == 0:
+ dist.barrier(device_ids=[0])
+
+
+def device_count():
+ # Returns number of CUDA devices available. Safe version of torch.cuda.device_count(). Supports Linux and Windows
+ assert platform.system() in ('Linux', 'Windows'), 'device_count() only supported on Linux or Windows'
+ try:
+ cmd = 'nvidia-smi -L | wc -l' if platform.system() == 'Linux' else 'nvidia-smi -L | find /c /v ""' # Windows
+ return int(subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1])
+ except Exception:
+ return 0
+
+
+def select_device(device='', batch_size=0, newline=True):
+ # device = None or 'cpu' or 0 or '0' or '0,1,2,3'
+ s = f'YOLOv5 🚀 {git_describe() or file_date()} Python-{platform.python_version()} torch-{torch.__version__} '
+ device = str(device).strip().lower().replace('cuda:', '').replace('none', '') # to string, 'cuda:0' to '0'
+ cpu = device == 'cpu'
+ mps = device == 'mps' # Apple Metal Performance Shaders (MPS)
+ if cpu or mps:
+ os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
+ elif device: # non-cpu device requested
+ os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable - must be before assert is_available()
+ assert torch.cuda.is_available() and torch.cuda.device_count() >= len(device.replace(',', '')), \
+ f"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)"
+
+ if not (cpu or mps) and torch.cuda.is_available(): # prefer GPU if available
+ devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7
+ n = len(devices) # device count
+ if n > 1 and batch_size > 0: # check batch_size is divisible by device_count
+ assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
+ space = ' ' * (len(s) + 1)
+ for i, d in enumerate(devices):
+ p = torch.cuda.get_device_properties(i)
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / (1 << 20):.0f}MiB)\n" # bytes to MB
+ arg = 'cuda:0'
+ elif mps and getattr(torch, 'has_mps', False) and torch.backends.mps.is_available(): # prefer MPS if available
+ s += 'MPS\n'
+ arg = 'mps'
+ else: # revert to CPU
+ s += 'CPU\n'
+ arg = 'cpu'
+
+ if not newline:
+ s = s.rstrip()
+ LOGGER.info(s)
+ return torch.device(arg)
+
+
+def time_sync():
+ # PyTorch-accurate time
+ if torch.cuda.is_available():
+ torch.cuda.synchronize()
+ return time.time()
+
+
+def profile(input, ops, n=10, device=None):
+ """ YOLOv5 speed/memory/FLOPs profiler
+ Usage:
+ input = torch.randn(16, 3, 640, 640)
+ m1 = lambda x: x * torch.sigmoid(x)
+ m2 = nn.SiLU()
+ profile(input, [m1, m2], n=100) # profile over 100 iterations
+ """
+ results = []
+ if not isinstance(device, torch.device):
+ device = select_device(device)
+ print(f"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}"
+ f"{'input':>24s}{'output':>24s}")
+
+ for x in input if isinstance(input, list) else [input]:
+ x = x.to(device)
+ x.requires_grad = True
+ for m in ops if isinstance(ops, list) else [ops]:
+ m = m.to(device) if hasattr(m, 'to') else m # device
+ m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m
+ tf, tb, t = 0, 0, [0, 0, 0] # dt forward, backward
+ try:
+ flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPs
+ except Exception:
+ flops = 0
+
+ try:
+ for _ in range(n):
+ t[0] = time_sync()
+ y = m(x)
+ t[1] = time_sync()
+ try:
+ _ = (sum(yi.sum() for yi in y) if isinstance(y, list) else y).sum().backward()
+ t[2] = time_sync()
+ except Exception: # no backward method
+ # print(e) # for debug
+ t[2] = float('nan')
+ tf += (t[1] - t[0]) * 1000 / n # ms per op forward
+ tb += (t[2] - t[1]) * 1000 / n # ms per op backward
+ mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0 # (GB)
+ s_in, s_out = (tuple(x.shape) if isinstance(x, torch.Tensor) else 'list' for x in (x, y)) # shapes
+ p = sum(x.numel() for x in m.parameters()) if isinstance(m, nn.Module) else 0 # parameters
+ print(f'{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}')
+ results.append([p, flops, mem, tf, tb, s_in, s_out])
+ except Exception as e:
+ print(e)
+ results.append(None)
+ torch.cuda.empty_cache()
+ return results
+
+
+def is_parallel(model):
+ # Returns True if model is of type DP or DDP
+ return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
+
+
+def de_parallel(model):
+ # De-parallelize a model: returns single-GPU model if model is of type DP or DDP
+ return model.module if is_parallel(model) else model
+
+
+def initialize_weights(model):
+ for m in model.modules():
+ t = type(m)
+ if t is nn.Conv2d:
+ pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
+ elif t is nn.BatchNorm2d:
+ m.eps = 1e-3
+ m.momentum = 0.03
+ elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
+ m.inplace = True
+
+
+def find_modules(model, mclass=nn.Conv2d):
+ # Finds layer indices matching module class 'mclass'
+ return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
+
+
+def sparsity(model):
+ # Return global model sparsity
+ a, b = 0, 0
+ for p in model.parameters():
+ a += p.numel()
+ b += (p == 0).sum()
+ return b / a
+
+
+def prune(model, amount=0.3):
+ # Prune model to requested global sparsity
+ import torch.nn.utils.prune as prune
+ for name, m in model.named_modules():
+ if isinstance(m, nn.Conv2d):
+ prune.l1_unstructured(m, name='weight', amount=amount) # prune
+ prune.remove(m, 'weight') # make permanent
+ LOGGER.info(f'Model pruned to {sparsity(model):.3g} global sparsity')
+
+
+def fuse_conv_and_bn(conv, bn):
+ # Fuse Conv2d() and BatchNorm2d() layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
+ fusedconv = nn.Conv2d(conv.in_channels,
+ conv.out_channels,
+ kernel_size=conv.kernel_size,
+ stride=conv.stride,
+ padding=conv.padding,
+ groups=conv.groups,
+ bias=True).requires_grad_(False).to(conv.weight.device)
+
+ # Prepare filters
+ w_conv = conv.weight.clone().view(conv.out_channels, -1)
+ w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
+ fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
+
+ # Prepare spatial bias
+ b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
+ b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
+ fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
+
+ return fusedconv
+
+
+def model_info(model, verbose=False, imgsz=640):
+ # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
+ n_p = sum(x.numel() for x in model.parameters()) # number parameters
+ n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
+ if verbose:
+ print(f"{'layer':>5} {'name':>40} {'gradient':>9} {'parameters':>12} {'shape':>20} {'mu':>10} {'sigma':>10}")
+ for i, (name, p) in enumerate(model.named_parameters()):
+ name = name.replace('module_list.', '')
+ print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
+ (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
+
+ try: # FLOPs
+ p = next(model.parameters())
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32 # max stride
+ im = torch.zeros((1, p.shape[1], stride, stride), device=p.device) # input image in BCHW format
+ flops = thop.profile(deepcopy(model), inputs=(im,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
+ imgsz = imgsz if isinstance(imgsz, list) else [imgsz, imgsz] # expand if int/float
+ fs = f', {flops * imgsz[0] / stride * imgsz[1] / stride:.1f} GFLOPs' # 640x640 GFLOPs
+ except Exception:
+ fs = ''
+
+ name = Path(model.yaml_file).stem.replace('yolov5', 'YOLOv5') if hasattr(model, 'yaml_file') else 'Model'
+ LOGGER.info(f"{name} summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
+
+
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # Scales img(bs,3,y,x) by ratio constrained to gs-multiple
+ if ratio == 1.0:
+ return img
+ h, w = img.shape[2:]
+ s = (int(h * ratio), int(w * ratio)) # new size
+ img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
+ if not same_shape: # pad/crop img
+ h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))
+ return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
+
+
+def copy_attr(a, b, include=(), exclude=()):
+ # Copy attributes from b to a, options to only include [...] and to exclude [...]
+ for k, v in b.__dict__.items():
+ if (len(include) and k not in include) or k.startswith('_') or k in exclude:
+ continue
+ else:
+ setattr(a, k, v)
+
+
+def smart_optimizer(model, name='Adam', lr=0.001, momentum=0.9, decay=1e-5):
+ # YOLOv5 3-param group optimizer: 0) weights with decay, 1) weights no decay, 2) biases no decay
+ g = [], [], [] # optimizer parameter groups
+ bn = tuple(v for k, v in nn.__dict__.items() if 'Norm' in k) # normalization layers, i.e. BatchNorm2d()
+ for v in model.modules():
+ if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter): # bias (no decay)
+ g[2].append(v.bias)
+ if isinstance(v, bn): # weight (no decay)
+ g[1].append(v.weight)
+ elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter): # weight (with decay)
+ g[0].append(v.weight)
+ if hasattr(v, 'im'):
+ if hasattr(v.im, 'implicit'):
+ g[1].append(v.im.implicit)
+ else:
+ for iv in v.im:
+ g[1].append(iv.implicit)
+ if hasattr(v, 'ia'):
+ if hasattr(v.ia, 'implicit'):
+ g[1].append(v.ia.implicit)
+ else:
+ for iv in v.ia:
+ g[1].append(iv.implicit)
+
+ if name == 'Adam':
+ optimizer = torch.optim.Adam(g[2], lr=lr, betas=(momentum, 0.999)) # adjust beta1 to momentum
+ elif name == 'AdamW':
+ optimizer = torch.optim.AdamW(g[2], lr=lr, betas=(momentum, 0.999), weight_decay=0.0)
+ elif name == 'RMSProp':
+ optimizer = torch.optim.RMSprop(g[2], lr=lr, momentum=momentum)
+ elif name == 'SGD':
+ optimizer = torch.optim.SGD(g[2], lr=lr, momentum=momentum, nesterov=True)
+ else:
+ raise NotImplementedError(f'Optimizer {name} not implemented.')
+
+ optimizer.add_param_group({'params': g[0], 'weight_decay': decay}) # add g0 with weight_decay
+ optimizer.add_param_group({'params': g[1], 'weight_decay': 0.0}) # add g1 (BatchNorm2d weights)
+ LOGGER.info(f"{colorstr('optimizer:')} {type(optimizer).__name__}(lr={lr}) with parameter groups "
+ f"{len(g[1])} weight(decay=0.0), {len(g[0])} weight(decay={decay}), {len(g[2])} bias")
+ return optimizer
+
+
+def smart_hub_load(repo='ultralytics/yolov5', model='yolov5s', **kwargs):
+ # YOLOv5 torch.hub.load() wrapper with smart error/issue handling
+ if check_version(torch.__version__, '1.9.1'):
+ kwargs['skip_validation'] = True # validation causes GitHub API rate limit errors
+ if check_version(torch.__version__, '1.12.0'):
+ kwargs['trust_repo'] = True # argument required starting in torch 0.12
+ try:
+ return torch.hub.load(repo, model, **kwargs)
+ except Exception:
+ return torch.hub.load(repo, model, force_reload=True, **kwargs)
+
+
+def smart_resume(ckpt, optimizer, ema=None, weights='yolov5s.pt', epochs=300, resume=True):
+ # Resume training from a partially trained checkpoint
+ best_fitness = 0.0
+ start_epoch = ckpt['epoch'] + 1
+ if ckpt['optimizer'] is not None:
+ optimizer.load_state_dict(ckpt['optimizer']) # optimizer
+ best_fitness = ckpt['best_fitness']
+ if ema and ckpt.get('ema'):
+ ema.ema.load_state_dict(ckpt['ema'].float().state_dict()) # EMA
+ ema.updates = ckpt['updates']
+ if resume:
+ assert start_epoch > 0, f'{weights} training to {epochs} epochs is finished, nothing to resume.\n' \
+ f"Start a new training without --resume, i.e. 'python train.py --weights {weights}'"
+ LOGGER.info(f'Resuming training from {weights} from epoch {start_epoch} to {epochs} total epochs')
+ if epochs < start_epoch:
+ LOGGER.info(f"{weights} has been trained for {ckpt['epoch']} epochs. Fine-tuning for {epochs} more epochs.")
+ epochs += ckpt['epoch'] # finetune additional epochs
+ return best_fitness, start_epoch, epochs
+
+
+class EarlyStopping:
+ # YOLOv5 simple early stopper
+ def __init__(self, patience=30):
+ self.best_fitness = 0.0 # i.e. mAP
+ self.best_epoch = 0
+ self.patience = patience or float('inf') # epochs to wait after fitness stops improving to stop
+ self.possible_stop = False # possible stop may occur next epoch
+
+ def __call__(self, epoch, fitness):
+ if fitness >= self.best_fitness: # >= 0 to allow for early zero-fitness stage of training
+ self.best_epoch = epoch
+ self.best_fitness = fitness
+ delta = epoch - self.best_epoch # epochs without improvement
+ self.possible_stop = delta >= (self.patience - 1) # possible stop may occur next epoch
+ stop = delta >= self.patience # stop training if patience exceeded
+ if stop:
+ LOGGER.info(f'Stopping training early as no improvement observed in last {self.patience} epochs. '
+ f'Best results observed at epoch {self.best_epoch}, best model saved as best.pt.\n'
+ f'To update EarlyStopping(patience={self.patience}) pass a new patience value, '
+ f'i.e. `python train.py --patience 300` or use `--patience 0` to disable EarlyStopping.')
+ return stop
+
+
+class ModelEMA:
+ """ Updated Exponential Moving Average (EMA) from https://github.com/rwightman/pytorch-image-models
+ Keeps a moving average of everything in the model state_dict (parameters and buffers)
+ For EMA details see https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
+ """
+
+ def __init__(self, model, decay=0.9999, tau=2000, updates=0):
+ # Create EMA
+ self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA
+ # if next(model.parameters()).device.type != 'cpu':
+ # self.ema.half() # FP16 EMA
+ self.updates = updates # number of EMA updates
+ self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)
+ for p in self.ema.parameters():
+ p.requires_grad_(False)
+
+ @smart_inference_mode()
+ def update(self, model):
+ # Update EMA parameters
+ self.updates += 1
+ d = self.decay(self.updates)
+
+ msd = de_parallel(model).state_dict() # model state_dict
+ for k, v in self.ema.state_dict().items():
+ if v.dtype.is_floating_point:
+ v *= d
+ v += (1 - d) * msd[k].detach()
+
+ def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
+ # Update EMA attributes
+ copy_attr(self.ema, model, include, exclude)
diff --git a/yolov7_seg/det/val.py b/yolov7_seg/det/val.py
new file mode 100644
index 000000000..0cd1104d6
--- /dev/null
+++ b/yolov7_seg/det/val.py
@@ -0,0 +1,396 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a trained YOLOv5 model accuracy on a custom dataset
+
+Usage:
+ $ python path/to/val.py --weights yolov5s.pt --data coco128.yaml --img 640
+
+Usage - formats:
+ $ python path/to/val.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import json
+import os
+import sys
+from pathlib import Path
+
+import numpy as np
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.callbacks import Callbacks
+from utils.dataloaders import create_dataloader
+from utils.general import (LOGGER, check_dataset, check_img_size, check_requirements, check_yaml,
+ coco80_to_coco91_class, colorstr, increment_path, non_max_suppression, print_args,
+ scale_coords, xywh2xyxy, xyxy2xywh)
+from utils.metrics import ConfusionMatrix, ap_per_class, box_iou
+from utils.plots import output_to_target, plot_images, plot_val_study
+from utils.torch_utils import select_device, smart_inference_mode, time_sync
+
+
+def save_one_txt(predn, save_conf, shape, file):
+ # Save one txt result
+ gn = torch.tensor(shape)[[1, 0, 1, 0]] # normalization gain whwh
+ for *xyxy, conf, cls in predn.tolist():
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(file, 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+
+def save_one_json(predn, jdict, path, class_map):
+ # Save one JSON result {"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}
+ image_id = int(path.stem) if path.stem.isnumeric() else path.stem
+ box = xyxy2xywh(predn[:, :4]) # xywh
+ box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
+ for p, b in zip(predn.tolist(), box.tolist()):
+ jdict.append({
+ 'image_id': image_id,
+ 'category_id': class_map[int(p[5])],
+ 'bbox': [round(x, 3) for x in b],
+ 'score': round(p[4], 5)})
+
+
+def process_batch(detections, labels, iouv):
+ """
+ Return correct predictions matrix. Both sets of boxes are in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ correct (Array[N, 10]), for 10 IoU levels
+ """
+ correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+ correct_class = labels[:, 0:1] == detections[:, 5]
+ for i in range(len(iouv)):
+ x = torch.where((iou >= iouv[i]) & correct_class) # IoU > threshold and classes match
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detect, iou]
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ # matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ correct[matches[:, 1].astype(int), i] = True
+ return torch.tensor(correct, dtype=torch.bool, device=iouv.device)
+
+
+@smart_inference_mode()
+def run(
+ data,
+ weights=None, # model.pt path(s)
+ batch_size=32, # batch size
+ imgsz=640, # inference size (pixels)
+ conf_thres=0.001, # confidence threshold
+ iou_thres=0.6, # NMS IoU threshold
+ task='val', # train, val, test, speed or study
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ workers=8, # max dataloader workers (per RANK in DDP mode)
+ single_cls=False, # treat as single-class dataset
+ augment=False, # augmented inference
+ verbose=False, # verbose output
+ save_txt=False, # save results to *.txt
+ save_hybrid=False, # save label+prediction hybrid results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_json=False, # save a COCO-JSON results file
+ project=ROOT / 'runs/val', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=True, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ model=None,
+ dataloader=None,
+ save_dir=Path(''),
+ plots=True,
+ callbacks=Callbacks(),
+ compute_loss=None,
+):
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ model.half() if half else model.float()
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ if engine:
+ batch_size = model.batch_size
+ else:
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
+
+ # Data
+ data = check_dataset(data) # check
+
+ # Configure
+ model.eval()
+ cuda = device.type != 'cpu'
+ is_coco = isinstance(data.get('val'), str) and data['val'].endswith(f'coco{os.sep}val2017.txt') # COCO dataset
+ nc = 1 if single_cls else int(data['nc']) # number of classes
+ iouv = torch.linspace(0.5, 0.95, 10, device=device) # iou vector for mAP@0.5:0.95
+ niou = iouv.numel()
+
+ # Dataloader
+ if not training:
+ if pt and not single_cls: # check --weights are trained on --data
+ ncm = model.model.nc
+ assert ncm == nc, f'{weights} ({ncm} classes) trained on different --data than what you passed ({nc} ' \
+ f'classes). Pass correct combination of --weights and --data that are trained together.'
+ model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
+ pad = 0.0 if task in ('speed', 'benchmark') else 0.5
+ rect = False if task == 'benchmark' else pt # square inference for benchmarks
+ task = task if task in ('train', 'val', 'test') else 'val' # path to train/val/test images
+ dataloader = create_dataloader(data[task],
+ imgsz,
+ batch_size,
+ stride,
+ single_cls,
+ pad=pad,
+ rect=rect,
+ workers=workers,
+ prefix=colorstr(f'{task}: '))[0]
+
+ seen = 0
+ confusion_matrix = ConfusionMatrix(nc=nc)
+ names = dict(enumerate(model.names if hasattr(model, 'names') else model.module.names))
+ class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
+ s = ('%20s' + '%11s' * 6) % ('Class', 'Images', 'Labels', 'P', 'R', 'mAP@.5', 'mAP@.5:.95')
+ dt, p, r, f1, mp, mr, map50, map = [0.0, 0.0, 0.0], 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
+ loss = torch.zeros(3, device=device)
+ jdict, stats, ap, ap_class = [], [], [], []
+ callbacks.run('on_val_start')
+ pbar = tqdm(dataloader, desc=s, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ for batch_i, (im, targets, paths, shapes) in enumerate(pbar):
+ callbacks.run('on_val_batch_start')
+ t1 = time_sync()
+ if cuda:
+ im = im.to(device, non_blocking=True)
+ targets = targets.to(device)
+ im = im.half() if half else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ nb, _, height, width = im.shape # batch size, channels, height, width
+ t2 = time_sync()
+ dt[0] += t2 - t1
+
+ # Inference
+ out, train_out = model(im) if training else model(im, augment=augment, val=True) # inference, loss outputs
+ dt[1] += time_sync() - t2
+
+ # Loss
+ if compute_loss:
+ loss += compute_loss([x.float() for x in train_out], targets)[1] # box, obj, cls
+
+ # NMS
+ targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
+ lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
+ t3 = time_sync()
+ out = non_max_suppression(out, conf_thres, iou_thres, labels=lb, multi_label=True, agnostic=single_cls)
+ dt[2] += time_sync() - t3
+
+ # Metrics
+ for si, pred in enumerate(out):
+ labels = targets[targets[:, 0] == si, 1:]
+ nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
+ path, shape = Path(paths[si]), shapes[si][0]
+ correct = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
+ seen += 1
+
+ if npr == 0:
+ if nl:
+ stats.append((correct, *torch.zeros((2, 0), device=device), labels[:, 0]))
+ if plots:
+ confusion_matrix.process_batch(detections=None, labels=labels[:, 0])
+ continue
+
+ # Predictions
+ if single_cls:
+ pred[:, 5] = 0
+ predn = pred.clone()
+ scale_coords(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
+
+ # Evaluate
+ if nl:
+ tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
+ scale_coords(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
+ labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
+ correct = process_batch(predn, labelsn, iouv)
+ if plots:
+ confusion_matrix.process_batch(predn, labelsn)
+ stats.append((correct, pred[:, 4], pred[:, 5], labels[:, 0])) # (correct, conf, pcls, tcls)
+
+ # Save/log
+ if save_txt:
+ save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / f'{path.stem}.txt')
+ if save_json:
+ save_one_json(predn, jdict, path, class_map) # append to COCO-JSON dictionary
+ callbacks.run('on_val_image_end', pred, predn, path, names, im[si])
+
+ # Plot images
+ if plots and batch_i < 3:
+ plot_images(im, targets, paths, save_dir / f'val_batch{batch_i}_labels.jpg', names) # labels
+ plot_images(im, output_to_target(out), paths, save_dir / f'val_batch{batch_i}_pred.jpg', names) # pred
+
+ callbacks.run('on_val_batch_end')
+
+ # Compute metrics
+ stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
+ if len(stats) and stats[0].any():
+ tp, fp, p, r, f1, ap, ap_class = ap_per_class(*stats, plot=plots, save_dir=save_dir, names=names)
+ ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95
+ mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
+ nt = np.bincount(stats[3].astype(int), minlength=nc) # number of targets per class
+
+ # Print results
+ pf = '%20s' + '%11i' * 2 + '%11.3g' * 4 # print format
+ LOGGER.info(pf % ('all', seen, nt.sum(), mp, mr, map50, map))
+ if nt.sum() == 0:
+ LOGGER.warning(f'WARNING: no labels found in {task} set, can not compute metrics without labels ⚠️')
+
+ # Print results per class
+ if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
+ for i, c in enumerate(ap_class):
+ LOGGER.info(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
+
+ # Print speeds
+ t = tuple(x / seen * 1E3 for x in dt) # speeds per image
+ if not training:
+ shape = (batch_size, 3, imgsz, imgsz)
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}' % t)
+
+ # Plots
+ if plots:
+ confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
+ callbacks.run('on_val_end')
+
+ # Save JSON
+ if save_json and len(jdict):
+ w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
+ anno_json = str(Path(data.get('path', '../coco')) / 'annotations/instances_val2017.json') # annotations json
+ pred_json = str(save_dir / f"{w}_predictions.json") # predictions json
+ LOGGER.info(f'\nEvaluating pycocotools mAP... saving {pred_json}...')
+ with open(pred_json, 'w') as f:
+ json.dump(jdict, f)
+
+ try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
+ check_requirements(['pycocotools'])
+ from pycocotools.coco import COCO
+ from pycocotools.cocoeval import COCOeval
+
+ anno = COCO(anno_json) # init annotations api
+ pred = anno.loadRes(pred_json) # init predictions api
+ eval = COCOeval(anno, pred, 'bbox')
+ if is_coco:
+ eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.im_files] # image IDs to evaluate
+ eval.evaluate()
+ eval.accumulate()
+ eval.summarize()
+ map, map50 = eval.stats[:2] # update results (mAP@0.5:0.95, mAP@0.5)
+ except Exception as e:
+ LOGGER.info(f'pycocotools unable to run: {e}')
+
+ # Return results
+ model.float() # for training
+ if not training:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ maps = np.zeros(nc) + map
+ for i, c in enumerate(ap_class):
+ maps[c] = ap[i]
+ return (mp, mr, map50, map, *(loss.cpu() / len(dataloader)).tolist()), maps, t
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model.pt path(s)')
+ parser.add_argument('--batch-size', type=int, default=32, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold')
+ parser.add_argument('--task', default='val', help='train, val, test, speed or study')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--verbose', action='store_true', help='report mAP by class')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-json', action='store_true', help='save a COCO-JSON results file')
+ parser.add_argument('--project', default=ROOT / 'runs/val', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.data = check_yaml(opt.data) # check YAML
+ opt.save_json |= opt.data.endswith('coco.yaml')
+ opt.save_txt |= opt.save_hybrid
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ #check_requirements(requirements=ROOT / 'requirements.txt', exclude=('tensorboard', 'thop'))
+
+ if opt.task in ('train', 'val', 'test'): # run normally
+ if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
+ LOGGER.info(f'WARNING: confidence threshold {opt.conf_thres} > 0.001 produces invalid results ⚠️')
+ run(**vars(opt))
+
+ else:
+ weights = opt.weights if isinstance(opt.weights, list) else [opt.weights]
+ opt.half = True # FP16 for fastest results
+ if opt.task == 'speed': # speed benchmarks
+ # python val.py --task speed --data coco.yaml --batch 1 --weights yolov5n.pt yolov5s.pt...
+ opt.conf_thres, opt.iou_thres, opt.save_json = 0.25, 0.45, False
+ for opt.weights in weights:
+ run(**vars(opt), plots=False)
+
+ elif opt.task == 'study': # speed vs mAP benchmarks
+ # python val.py --task study --data coco.yaml --iou 0.7 --weights yolov5n.pt yolov5s.pt...
+ for opt.weights in weights:
+ f = f'study_{Path(opt.data).stem}_{Path(opt.weights).stem}.txt' # filename to save to
+ x, y = list(range(256, 1536 + 128, 128)), [] # x axis (image sizes), y axis
+ for opt.imgsz in x: # img-size
+ LOGGER.info(f'\nRunning {f} --imgsz {opt.imgsz}...')
+ r, _, t = run(**vars(opt), plots=False)
+ y.append(r + t) # results and times
+ np.savetxt(f, y, fmt='%10.4g') # save
+ os.system('zip -r study.zip study_*.txt')
+ plot_val_study(x=x) # plot
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/seg/LICENSE b/yolov7_seg/seg/LICENSE
new file mode 100644
index 000000000..d96f36bb0
--- /dev/null
+++ b/yolov7_seg/seg/LICENSE
@@ -0,0 +1,674 @@
+GNU GENERAL PUBLIC LICENSE
+ Version 3, 29 June 2007
+
+ Copyright (C) 2007 Free Software Foundation, Inc.
+ Everyone is permitted to copy and distribute verbatim copies
+ of this license document, but changing it is not allowed.
+
+ Preamble
+
+ The GNU General Public License is a free, copyleft license for
+software and other kinds of works.
+
+ The licenses for most software and other practical works are designed
+to take away your freedom to share and change the works. By contrast,
+the GNU General Public License is intended to guarantee your freedom to
+share and change all versions of a program--to make sure it remains free
+software for all its users. We, the Free Software Foundation, use the
+GNU General Public License for most of our software; it applies also to
+any other work released this way by its authors. You can apply it to
+your programs, too.
+
+ When we speak of free software, we are referring to freedom, not
+price. Our General Public Licenses are designed to make sure that you
+have the freedom to distribute copies of free software (and charge for
+them if you wish), that you receive source code or can get it if you
+want it, that you can change the software or use pieces of it in new
+free programs, and that you know you can do these things.
+
+ To protect your rights, we need to prevent others from denying you
+these rights or asking you to surrender the rights. Therefore, you have
+certain responsibilities if you distribute copies of the software, or if
+you modify it: responsibilities to respect the freedom of others.
+
+ For example, if you distribute copies of such a program, whether
+gratis or for a fee, you must pass on to the recipients the same
+freedoms that you received. You must make sure that they, too, receive
+or can get the source code. And you must show them these terms so they
+know their rights.
+
+ Developers that use the GNU GPL protect your rights with two steps:
+(1) assert copyright on the software, and (2) offer you this License
+giving you legal permission to copy, distribute and/or modify it.
+
+ For the developers' and authors' protection, the GPL clearly explains
+that there is no warranty for this free software. For both users' and
+authors' sake, the GPL requires that modified versions be marked as
+changed, so that their problems will not be attributed erroneously to
+authors of previous versions.
+
+ Some devices are designed to deny users access to install or run
+modified versions of the software inside them, although the manufacturer
+can do so. This is fundamentally incompatible with the aim of
+protecting users' freedom to change the software. The systematic
+pattern of such abuse occurs in the area of products for individuals to
+use, which is precisely where it is most unacceptable. Therefore, we
+have designed this version of the GPL to prohibit the practice for those
+products. If such problems arise substantially in other domains, we
+stand ready to extend this provision to those domains in future versions
+of the GPL, as needed to protect the freedom of users.
+
+ Finally, every program is threatened constantly by software patents.
+States should not allow patents to restrict development and use of
+software on general-purpose computers, but in those that do, we wish to
+avoid the special danger that patents applied to a free program could
+make it effectively proprietary. To prevent this, the GPL assures that
+patents cannot be used to render the program non-free.
+
+ The precise terms and conditions for copying, distribution and
+modification follow.
+
+ TERMS AND CONDITIONS
+
+ 0. Definitions.
+
+ "This License" refers to version 3 of the GNU General Public License.
+
+ "Copyright" also means copyright-like laws that apply to other kinds of
+works, such as semiconductor masks.
+
+ "The Program" refers to any copyrightable work licensed under this
+License. Each licensee is addressed as "you". "Licensees" and
+"recipients" may be individuals or organizations.
+
+ To "modify" a work means to copy from or adapt all or part of the work
+in a fashion requiring copyright permission, other than the making of an
+exact copy. The resulting work is called a "modified version" of the
+earlier work or a work "based on" the earlier work.
+
+ A "covered work" means either the unmodified Program or a work based
+on the Program.
+
+ To "propagate" a work means to do anything with it that, without
+permission, would make you directly or secondarily liable for
+infringement under applicable copyright law, except executing it on a
+computer or modifying a private copy. Propagation includes copying,
+distribution (with or without modification), making available to the
+public, and in some countries other activities as well.
+
+ To "convey" a work means any kind of propagation that enables other
+parties to make or receive copies. Mere interaction with a user through
+a computer network, with no transfer of a copy, is not conveying.
+
+ An interactive user interface displays "Appropriate Legal Notices"
+to the extent that it includes a convenient and prominently visible
+feature that (1) displays an appropriate copyright notice, and (2)
+tells the user that there is no warranty for the work (except to the
+extent that warranties are provided), that licensees may convey the
+work under this License, and how to view a copy of this License. If
+the interface presents a list of user commands or options, such as a
+menu, a prominent item in the list meets this criterion.
+
+ 1. Source Code.
+
+ The "source code" for a work means the preferred form of the work
+for making modifications to it. "Object code" means any non-source
+form of a work.
+
+ A "Standard Interface" means an interface that either is an official
+standard defined by a recognized standards body, or, in the case of
+interfaces specified for a particular programming language, one that
+is widely used among developers working in that language.
+
+ The "System Libraries" of an executable work include anything, other
+than the work as a whole, that (a) is included in the normal form of
+packaging a Major Component, but which is not part of that Major
+Component, and (b) serves only to enable use of the work with that
+Major Component, or to implement a Standard Interface for which an
+implementation is available to the public in source code form. A
+"Major Component", in this context, means a major essential component
+(kernel, window system, and so on) of the specific operating system
+(if any) on which the executable work runs, or a compiler used to
+produce the work, or an object code interpreter used to run it.
+
+ The "Corresponding Source" for a work in object code form means all
+the source code needed to generate, install, and (for an executable
+work) run the object code and to modify the work, including scripts to
+control those activities. However, it does not include the work's
+System Libraries, or general-purpose tools or generally available free
+programs which are used unmodified in performing those activities but
+which are not part of the work. For example, Corresponding Source
+includes interface definition files associated with source files for
+the work, and the source code for shared libraries and dynamically
+linked subprograms that the work is specifically designed to require,
+such as by intimate data communication or control flow between those
+subprograms and other parts of the work.
+
+ The Corresponding Source need not include anything that users
+can regenerate automatically from other parts of the Corresponding
+Source.
+
+ The Corresponding Source for a work in source code form is that
+same work.
+
+ 2. Basic Permissions.
+
+ All rights granted under this License are granted for the term of
+copyright on the Program, and are irrevocable provided the stated
+conditions are met. This License explicitly affirms your unlimited
+permission to run the unmodified Program. The output from running a
+covered work is covered by this License only if the output, given its
+content, constitutes a covered work. This License acknowledges your
+rights of fair use or other equivalent, as provided by copyright law.
+
+ You may make, run and propagate covered works that you do not
+convey, without conditions so long as your license otherwise remains
+in force. You may convey covered works to others for the sole purpose
+of having them make modifications exclusively for you, or provide you
+with facilities for running those works, provided that you comply with
+the terms of this License in conveying all material for which you do
+not control copyright. Those thus making or running the covered works
+for you must do so exclusively on your behalf, under your direction
+and control, on terms that prohibit them from making any copies of
+your copyrighted material outside their relationship with you.
+
+ Conveying under any other circumstances is permitted solely under
+the conditions stated below. Sublicensing is not allowed; section 10
+makes it unnecessary.
+
+ 3. Protecting Users' Legal Rights From Anti-Circumvention Law.
+
+ No covered work shall be deemed part of an effective technological
+measure under any applicable law fulfilling obligations under article
+11 of the WIPO copyright treaty adopted on 20 December 1996, or
+similar laws prohibiting or restricting circumvention of such
+measures.
+
+ When you convey a covered work, you waive any legal power to forbid
+circumvention of technological measures to the extent such circumvention
+is effected by exercising rights under this License with respect to
+the covered work, and you disclaim any intention to limit operation or
+modification of the work as a means of enforcing, against the work's
+users, your or third parties' legal rights to forbid circumvention of
+technological measures.
+
+ 4. Conveying Verbatim Copies.
+
+ You may convey verbatim copies of the Program's source code as you
+receive it, in any medium, provided that you conspicuously and
+appropriately publish on each copy an appropriate copyright notice;
+keep intact all notices stating that this License and any
+non-permissive terms added in accord with section 7 apply to the code;
+keep intact all notices of the absence of any warranty; and give all
+recipients a copy of this License along with the Program.
+
+ You may charge any price or no price for each copy that you convey,
+and you may offer support or warranty protection for a fee.
+
+ 5. Conveying Modified Source Versions.
+
+ You may convey a work based on the Program, or the modifications to
+produce it from the Program, in the form of source code under the
+terms of section 4, provided that you also meet all of these conditions:
+
+ a) The work must carry prominent notices stating that you modified
+ it, and giving a relevant date.
+
+ b) The work must carry prominent notices stating that it is
+ released under this License and any conditions added under section
+ 7. This requirement modifies the requirement in section 4 to
+ "keep intact all notices".
+
+ c) You must license the entire work, as a whole, under this
+ License to anyone who comes into possession of a copy. This
+ License will therefore apply, along with any applicable section 7
+ additional terms, to the whole of the work, and all its parts,
+ regardless of how they are packaged. This License gives no
+ permission to license the work in any other way, but it does not
+ invalidate such permission if you have separately received it.
+
+ d) If the work has interactive user interfaces, each must display
+ Appropriate Legal Notices; however, if the Program has interactive
+ interfaces that do not display Appropriate Legal Notices, your
+ work need not make them do so.
+
+ A compilation of a covered work with other separate and independent
+works, which are not by their nature extensions of the covered work,
+and which are not combined with it such as to form a larger program,
+in or on a volume of a storage or distribution medium, is called an
+"aggregate" if the compilation and its resulting copyright are not
+used to limit the access or legal rights of the compilation's users
+beyond what the individual works permit. Inclusion of a covered work
+in an aggregate does not cause this License to apply to the other
+parts of the aggregate.
+
+ 6. Conveying Non-Source Forms.
+
+ You may convey a covered work in object code form under the terms
+of sections 4 and 5, provided that you also convey the
+machine-readable Corresponding Source under the terms of this License,
+in one of these ways:
+
+ a) Convey the object code in, or embodied in, a physical product
+ (including a physical distribution medium), accompanied by the
+ Corresponding Source fixed on a durable physical medium
+ customarily used for software interchange.
+
+ b) Convey the object code in, or embodied in, a physical product
+ (including a physical distribution medium), accompanied by a
+ written offer, valid for at least three years and valid for as
+ long as you offer spare parts or customer support for that product
+ model, to give anyone who possesses the object code either (1) a
+ copy of the Corresponding Source for all the software in the
+ product that is covered by this License, on a durable physical
+ medium customarily used for software interchange, for a price no
+ more than your reasonable cost of physically performing this
+ conveying of source, or (2) access to copy the
+ Corresponding Source from a network server at no charge.
+
+ c) Convey individual copies of the object code with a copy of the
+ written offer to provide the Corresponding Source. This
+ alternative is allowed only occasionally and noncommercially, and
+ only if you received the object code with such an offer, in accord
+ with subsection 6b.
+
+ d) Convey the object code by offering access from a designated
+ place (gratis or for a charge), and offer equivalent access to the
+ Corresponding Source in the same way through the same place at no
+ further charge. You need not require recipients to copy the
+ Corresponding Source along with the object code. If the place to
+ copy the object code is a network server, the Corresponding Source
+ may be on a different server (operated by you or a third party)
+ that supports equivalent copying facilities, provided you maintain
+ clear directions next to the object code saying where to find the
+ Corresponding Source. Regardless of what server hosts the
+ Corresponding Source, you remain obligated to ensure that it is
+ available for as long as needed to satisfy these requirements.
+
+ e) Convey the object code using peer-to-peer transmission, provided
+ you inform other peers where the object code and Corresponding
+ Source of the work are being offered to the general public at no
+ charge under subsection 6d.
+
+ A separable portion of the object code, whose source code is excluded
+from the Corresponding Source as a System Library, need not be
+included in conveying the object code work.
+
+ A "User Product" is either (1) a "consumer product", which means any
+tangible personal property which is normally used for personal, family,
+or household purposes, or (2) anything designed or sold for incorporation
+into a dwelling. In determining whether a product is a consumer product,
+doubtful cases shall be resolved in favor of coverage. For a particular
+product received by a particular user, "normally used" refers to a
+typical or common use of that class of product, regardless of the status
+of the particular user or of the way in which the particular user
+actually uses, or expects or is expected to use, the product. A product
+is a consumer product regardless of whether the product has substantial
+commercial, industrial or non-consumer uses, unless such uses represent
+the only significant mode of use of the product.
+
+ "Installation Information" for a User Product means any methods,
+procedures, authorization keys, or other information required to install
+and execute modified versions of a covered work in that User Product from
+a modified version of its Corresponding Source. The information must
+suffice to ensure that the continued functioning of the modified object
+code is in no case prevented or interfered with solely because
+modification has been made.
+
+ If you convey an object code work under this section in, or with, or
+specifically for use in, a User Product, and the conveying occurs as
+part of a transaction in which the right of possession and use of the
+User Product is transferred to the recipient in perpetuity or for a
+fixed term (regardless of how the transaction is characterized), the
+Corresponding Source conveyed under this section must be accompanied
+by the Installation Information. But this requirement does not apply
+if neither you nor any third party retains the ability to install
+modified object code on the User Product (for example, the work has
+been installed in ROM).
+
+ The requirement to provide Installation Information does not include a
+requirement to continue to provide support service, warranty, or updates
+for a work that has been modified or installed by the recipient, or for
+the User Product in which it has been modified or installed. Access to a
+network may be denied when the modification itself materially and
+adversely affects the operation of the network or violates the rules and
+protocols for communication across the network.
+
+ Corresponding Source conveyed, and Installation Information provided,
+in accord with this section must be in a format that is publicly
+documented (and with an implementation available to the public in
+source code form), and must require no special password or key for
+unpacking, reading or copying.
+
+ 7. Additional Terms.
+
+ "Additional permissions" are terms that supplement the terms of this
+License by making exceptions from one or more of its conditions.
+Additional permissions that are applicable to the entire Program shall
+be treated as though they were included in this License, to the extent
+that they are valid under applicable law. If additional permissions
+apply only to part of the Program, that part may be used separately
+under those permissions, but the entire Program remains governed by
+this License without regard to the additional permissions.
+
+ When you convey a copy of a covered work, you may at your option
+remove any additional permissions from that copy, or from any part of
+it. (Additional permissions may be written to require their own
+removal in certain cases when you modify the work.) You may place
+additional permissions on material, added by you to a covered work,
+for which you have or can give appropriate copyright permission.
+
+ Notwithstanding any other provision of this License, for material you
+add to a covered work, you may (if authorized by the copyright holders of
+that material) supplement the terms of this License with terms:
+
+ a) Disclaiming warranty or limiting liability differently from the
+ terms of sections 15 and 16 of this License; or
+
+ b) Requiring preservation of specified reasonable legal notices or
+ author attributions in that material or in the Appropriate Legal
+ Notices displayed by works containing it; or
+
+ c) Prohibiting misrepresentation of the origin of that material, or
+ requiring that modified versions of such material be marked in
+ reasonable ways as different from the original version; or
+
+ d) Limiting the use for publicity purposes of names of licensors or
+ authors of the material; or
+
+ e) Declining to grant rights under trademark law for use of some
+ trade names, trademarks, or service marks; or
+
+ f) Requiring indemnification of licensors and authors of that
+ material by anyone who conveys the material (or modified versions of
+ it) with contractual assumptions of liability to the recipient, for
+ any liability that these contractual assumptions directly impose on
+ those licensors and authors.
+
+ All other non-permissive additional terms are considered "further
+restrictions" within the meaning of section 10. If the Program as you
+received it, or any part of it, contains a notice stating that it is
+governed by this License along with a term that is a further
+restriction, you may remove that term. If a license document contains
+a further restriction but permits relicensing or conveying under this
+License, you may add to a covered work material governed by the terms
+of that license document, provided that the further restriction does
+not survive such relicensing or conveying.
+
+ If you add terms to a covered work in accord with this section, you
+must place, in the relevant source files, a statement of the
+additional terms that apply to those files, or a notice indicating
+where to find the applicable terms.
+
+ Additional terms, permissive or non-permissive, may be stated in the
+form of a separately written license, or stated as exceptions;
+the above requirements apply either way.
+
+ 8. Termination.
+
+ You may not propagate or modify a covered work except as expressly
+provided under this License. Any attempt otherwise to propagate or
+modify it is void, and will automatically terminate your rights under
+this License (including any patent licenses granted under the third
+paragraph of section 11).
+
+ However, if you cease all violation of this License, then your
+license from a particular copyright holder is reinstated (a)
+provisionally, unless and until the copyright holder explicitly and
+finally terminates your license, and (b) permanently, if the copyright
+holder fails to notify you of the violation by some reasonable means
+prior to 60 days after the cessation.
+
+ Moreover, your license from a particular copyright holder is
+reinstated permanently if the copyright holder notifies you of the
+violation by some reasonable means, this is the first time you have
+received notice of violation of this License (for any work) from that
+copyright holder, and you cure the violation prior to 30 days after
+your receipt of the notice.
+
+ Termination of your rights under this section does not terminate the
+licenses of parties who have received copies or rights from you under
+this License. If your rights have been terminated and not permanently
+reinstated, you do not qualify to receive new licenses for the same
+material under section 10.
+
+ 9. Acceptance Not Required for Having Copies.
+
+ You are not required to accept this License in order to receive or
+run a copy of the Program. Ancillary propagation of a covered work
+occurring solely as a consequence of using peer-to-peer transmission
+to receive a copy likewise does not require acceptance. However,
+nothing other than this License grants you permission to propagate or
+modify any covered work. These actions infringe copyright if you do
+not accept this License. Therefore, by modifying or propagating a
+covered work, you indicate your acceptance of this License to do so.
+
+ 10. Automatic Licensing of Downstream Recipients.
+
+ Each time you convey a covered work, the recipient automatically
+receives a license from the original licensors, to run, modify and
+propagate that work, subject to this License. You are not responsible
+for enforcing compliance by third parties with this License.
+
+ An "entity transaction" is a transaction transferring control of an
+organization, or substantially all assets of one, or subdividing an
+organization, or merging organizations. If propagation of a covered
+work results from an entity transaction, each party to that
+transaction who receives a copy of the work also receives whatever
+licenses to the work the party's predecessor in interest had or could
+give under the previous paragraph, plus a right to possession of the
+Corresponding Source of the work from the predecessor in interest, if
+the predecessor has it or can get it with reasonable efforts.
+
+ You may not impose any further restrictions on the exercise of the
+rights granted or affirmed under this License. For example, you may
+not impose a license fee, royalty, or other charge for exercise of
+rights granted under this License, and you may not initiate litigation
+(including a cross-claim or counterclaim in a lawsuit) alleging that
+any patent claim is infringed by making, using, selling, offering for
+sale, or importing the Program or any portion of it.
+
+ 11. Patents.
+
+ A "contributor" is a copyright holder who authorizes use under this
+License of the Program or a work on which the Program is based. The
+work thus licensed is called the contributor's "contributor version".
+
+ A contributor's "essential patent claims" are all patent claims
+owned or controlled by the contributor, whether already acquired or
+hereafter acquired, that would be infringed by some manner, permitted
+by this License, of making, using, or selling its contributor version,
+but do not include claims that would be infringed only as a
+consequence of further modification of the contributor version. For
+purposes of this definition, "control" includes the right to grant
+patent sublicenses in a manner consistent with the requirements of
+this License.
+
+ Each contributor grants you a non-exclusive, worldwide, royalty-free
+patent license under the contributor's essential patent claims, to
+make, use, sell, offer for sale, import and otherwise run, modify and
+propagate the contents of its contributor version.
+
+ In the following three paragraphs, a "patent license" is any express
+agreement or commitment, however denominated, not to enforce a patent
+(such as an express permission to practice a patent or covenant not to
+sue for patent infringement). To "grant" such a patent license to a
+party means to make such an agreement or commitment not to enforce a
+patent against the party.
+
+ If you convey a covered work, knowingly relying on a patent license,
+and the Corresponding Source of the work is not available for anyone
+to copy, free of charge and under the terms of this License, through a
+publicly available network server or other readily accessible means,
+then you must either (1) cause the Corresponding Source to be so
+available, or (2) arrange to deprive yourself of the benefit of the
+patent license for this particular work, or (3) arrange, in a manner
+consistent with the requirements of this License, to extend the patent
+license to downstream recipients. "Knowingly relying" means you have
+actual knowledge that, but for the patent license, your conveying the
+covered work in a country, or your recipient's use of the covered work
+in a country, would infringe one or more identifiable patents in that
+country that you have reason to believe are valid.
+
+ If, pursuant to or in connection with a single transaction or
+arrangement, you convey, or propagate by procuring conveyance of, a
+covered work, and grant a patent license to some of the parties
+receiving the covered work authorizing them to use, propagate, modify
+or convey a specific copy of the covered work, then the patent license
+you grant is automatically extended to all recipients of the covered
+work and works based on it.
+
+ A patent license is "discriminatory" if it does not include within
+the scope of its coverage, prohibits the exercise of, or is
+conditioned on the non-exercise of one or more of the rights that are
+specifically granted under this License. You may not convey a covered
+work if you are a party to an arrangement with a third party that is
+in the business of distributing software, under which you make payment
+to the third party based on the extent of your activity of conveying
+the work, and under which the third party grants, to any of the
+parties who would receive the covered work from you, a discriminatory
+patent license (a) in connection with copies of the covered work
+conveyed by you (or copies made from those copies), or (b) primarily
+for and in connection with specific products or compilations that
+contain the covered work, unless you entered into that arrangement,
+or that patent license was granted, prior to 28 March 2007.
+
+ Nothing in this License shall be construed as excluding or limiting
+any implied license or other defenses to infringement that may
+otherwise be available to you under applicable patent law.
+
+ 12. No Surrender of Others' Freedom.
+
+ If conditions are imposed on you (whether by court order, agreement or
+otherwise) that contradict the conditions of this License, they do not
+excuse you from the conditions of this License. If you cannot convey a
+covered work so as to satisfy simultaneously your obligations under this
+License and any other pertinent obligations, then as a consequence you may
+not convey it at all. For example, if you agree to terms that obligate you
+to collect a royalty for further conveying from those to whom you convey
+the Program, the only way you could satisfy both those terms and this
+License would be to refrain entirely from conveying the Program.
+
+ 13. Use with the GNU Affero General Public License.
+
+ Notwithstanding any other provision of this License, you have
+permission to link or combine any covered work with a work licensed
+under version 3 of the GNU Affero General Public License into a single
+combined work, and to convey the resulting work. The terms of this
+License will continue to apply to the part which is the covered work,
+but the special requirements of the GNU Affero General Public License,
+section 13, concerning interaction through a network will apply to the
+combination as such.
+
+ 14. Revised Versions of this License.
+
+ The Free Software Foundation may publish revised and/or new versions of
+the GNU General Public License from time to time. Such new versions will
+be similar in spirit to the present version, but may differ in detail to
+address new problems or concerns.
+
+ Each version is given a distinguishing version number. If the
+Program specifies that a certain numbered version of the GNU General
+Public License "or any later version" applies to it, you have the
+option of following the terms and conditions either of that numbered
+version or of any later version published by the Free Software
+Foundation. If the Program does not specify a version number of the
+GNU General Public License, you may choose any version ever published
+by the Free Software Foundation.
+
+ If the Program specifies that a proxy can decide which future
+versions of the GNU General Public License can be used, that proxy's
+public statement of acceptance of a version permanently authorizes you
+to choose that version for the Program.
+
+ Later license versions may give you additional or different
+permissions. However, no additional obligations are imposed on any
+author or copyright holder as a result of your choosing to follow a
+later version.
+
+ 15. Disclaimer of Warranty.
+
+ THERE IS NO WARRANTY FOR THE PROGRAM, TO THE EXTENT PERMITTED BY
+APPLICABLE LAW. EXCEPT WHEN OTHERWISE STATED IN WRITING THE COPYRIGHT
+HOLDERS AND/OR OTHER PARTIES PROVIDE THE PROGRAM "AS IS" WITHOUT WARRANTY
+OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING, BUT NOT LIMITED TO,
+THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
+PURPOSE. THE ENTIRE RISK AS TO THE QUALITY AND PERFORMANCE OF THE PROGRAM
+IS WITH YOU. SHOULD THE PROGRAM PROVE DEFECTIVE, YOU ASSUME THE COST OF
+ALL NECESSARY SERVICING, REPAIR OR CORRECTION.
+
+ 16. Limitation of Liability.
+
+ IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW OR AGREED TO IN WRITING
+WILL ANY COPYRIGHT HOLDER, OR ANY OTHER PARTY WHO MODIFIES AND/OR CONVEYS
+THE PROGRAM AS PERMITTED ABOVE, BE LIABLE TO YOU FOR DAMAGES, INCLUDING ANY
+GENERAL, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING OUT OF THE
+USE OR INABILITY TO USE THE PROGRAM (INCLUDING BUT NOT LIMITED TO LOSS OF
+DATA OR DATA BEING RENDERED INACCURATE OR LOSSES SUSTAINED BY YOU OR THIRD
+PARTIES OR A FAILURE OF THE PROGRAM TO OPERATE WITH ANY OTHER PROGRAMS),
+EVEN IF SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE POSSIBILITY OF
+SUCH DAMAGES.
+
+ 17. Interpretation of Sections 15 and 16.
+
+ If the disclaimer of warranty and limitation of liability provided
+above cannot be given local legal effect according to their terms,
+reviewing courts shall apply local law that most closely approximates
+an absolute waiver of all civil liability in connection with the
+Program, unless a warranty or assumption of liability accompanies a
+copy of the Program in return for a fee.
+
+ END OF TERMS AND CONDITIONS
+
+ How to Apply These Terms to Your New Programs
+
+ If you develop a new program, and you want it to be of the greatest
+possible use to the public, the best way to achieve this is to make it
+free software which everyone can redistribute and change under these terms.
+
+ To do so, attach the following notices to the program. It is safest
+to attach them to the start of each source file to most effectively
+state the exclusion of warranty; and each file should have at least
+the "copyright" line and a pointer to where the full notice is found.
+
+
+ Copyright (C)
+
+ This program is free software: you can redistribute it and/or modify
+ it under the terms of the GNU General Public License as published by
+ the Free Software Foundation, either version 3 of the License, or
+ (at your option) any later version.
+
+ This program is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
+ GNU General Public License for more details.
+
+ You should have received a copy of the GNU General Public License
+ along with this program. If not, see .
+
+Also add information on how to contact you by electronic and paper mail.
+
+ If the program does terminal interaction, make it output a short
+notice like this when it starts in an interactive mode:
+
+ Copyright (C)
+ This program comes with ABSOLUTELY NO WARRANTY; for details type `show w'.
+ This is free software, and you are welcome to redistribute it
+ under certain conditions; type `show c' for details.
+
+The hypothetical commands `show w' and `show c' should show the appropriate
+parts of the General Public License. Of course, your program's commands
+might be different; for a GUI interface, you would use an "about box".
+
+ You should also get your employer (if you work as a programmer) or school,
+if any, to sign a "copyright disclaimer" for the program, if necessary.
+For more information on this, and how to apply and follow the GNU GPL, see
+.
+
+ The GNU General Public License does not permit incorporating your program
+into proprietary programs. If your program is a subroutine library, you
+may consider it more useful to permit linking proprietary applications with
+the library. If this is what you want to do, use the GNU Lesser General
+Public License instead of this License. But first, please read
+.
diff --git a/yolov7_seg/seg/README.md b/yolov7_seg/seg/README.md
new file mode 100644
index 000000000..c0484e94a
--- /dev/null
+++ b/yolov7_seg/seg/README.md
@@ -0,0 +1,153 @@
+# yolov7
+
+Implementation of "YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors"
+
+This implimentation is based on [yolov5](https://github.com/ultralytics/yolov5).
+
+All of installation, data preparation, and usage are as same as yolov5.
+
+## Training
+
+``` shell
+python segment/train.py --data coco.yaml --batch 16 --weights '' --cfg yolov7-seg.yaml --epochs 300 --name yolov7-seg --img 640 --hyp hyp.scratch-high.yaml
+```
+
+## Results
+
+[`yolov7-seg.pt`](https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7-seg.pt)
+
+```
+Object detection:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.49629
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.67746
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.53842
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.32679
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.55475
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.63948
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.37569
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.61747
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.66796
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.49381
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.72859
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.81632
+
+Instance segmentation:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.40531
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.64003
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.42996
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.22329
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.46102
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.56453
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.32220
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.51069
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.54511
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.34929
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.61070
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.72177
+```
+
+[`yolov7x-seg.pt`](https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7x-seg.pt)
+
+```
+Object detection:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.51650
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.69517
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.56113
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.34761
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.57255
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.66059
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.38840
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.63697
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.68754
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.51488
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.74506
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.83554
+
+Instance segmentation:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.41901
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.65833
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.44483
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.23123
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.47414
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.58149
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.33164
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.52327
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.55738
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.35367
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.62091
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.74205
+```
+
+## Examples
+
+
+
+## Developing...
+
+[`yolov7-seg-dev.pt`](https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7-seg-dev.pt)
+
+```
+Object detection:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.51100
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.68832
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.55593
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.34518
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.56570
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.65318
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.38180
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.63630
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.68619
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.52338
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.74392
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.82744
+
+Instance segmentation:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.41422
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.65154
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.44169
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.23393
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.46379
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.57722
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.32766
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.52457
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.55851
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.35866
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.61833
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.74352
+```
+
+update yolor modling
+
+```
+Object detection:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.51384
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.69383
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.55794
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.34061
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.56557
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.66566
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.38459
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.63617
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.68621
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.52662
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.73997
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.83435
+
+Instance segmentation:
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.41483
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.65499
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.43665
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.22629
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.46021
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.58898
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.32963
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.52450
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.55855
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.36392
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.61302
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.74983
+```
diff --git a/yolov7_seg/seg/__pycache__/export.cpython-310.pyc b/yolov7_seg/seg/__pycache__/export.cpython-310.pyc
new file mode 100644
index 000000000..809b3e66a
Binary files /dev/null and b/yolov7_seg/seg/__pycache__/export.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/classify/predict.py b/yolov7_seg/seg/classify/predict.py
new file mode 100644
index 000000000..96d9d433d
--- /dev/null
+++ b/yolov7_seg/seg/classify/predict.py
@@ -0,0 +1,214 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run YOLOv5 classification inference on images, videos, directories, globs, YouTube, webcam, streams, etc.
+
+Usage - sources:
+ $ python classify/predict.py --weights yolov5s-cls.pt --source 0 # webcam
+ img.jpg # image
+ vid.mp4 # video
+ path/ # directory
+ 'path/*.jpg' # glob
+ 'https://youtu.be/Zgi9g1ksQHc' # YouTube
+ 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
+
+Usage - formats:
+ $ python classify/predict.py --weights yolov5s-cls.pt # PyTorch
+ yolov5s-cls.torchscript # TorchScript
+ yolov5s-cls.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s-cls.xml # OpenVINO
+ yolov5s-cls.engine # TensorRT
+ yolov5s-cls.mlmodel # CoreML (macOS-only)
+ yolov5s-cls_saved_model # TensorFlow SavedModel
+ yolov5s-cls.pb # TensorFlow GraphDef
+ yolov5s-cls.tflite # TensorFlow Lite
+ yolov5s-cls_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import os
+import platform
+import sys
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+import torch.nn.functional as F
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.augmentations import classify_transforms
+from utils.dataloaders import IMG_FORMATS, VID_FORMATS, LoadImages, LoadStreams
+from utils.general import (LOGGER, Profile, check_file, check_img_size, check_imshow, check_requirements, colorstr, cv2,
+ increment_path, print_args, strip_optimizer)
+from utils.plots import Annotator
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+@smart_inference_mode()
+def run(
+ weights=ROOT / 'yolov5s-cls.pt', # model.pt path(s)
+ source=ROOT / 'data/images', # file/dir/URL/glob, 0 for webcam
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ imgsz=(224, 224), # inference size (height, width)
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ view_img=False, # show results
+ save_txt=False, # save results to *.txt
+ nosave=False, # do not save images/videos
+ augment=False, # augmented inference
+ visualize=False, # visualize features
+ update=False, # update all models
+ project=ROOT / 'runs/predict-cls', # save results to project/name
+ name='exp', # save results to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+):
+ source = str(source)
+ save_img = not nosave and not source.endswith('.txt') # save inference images
+ is_file = Path(source).suffix[1:] in (IMG_FORMATS + VID_FORMATS)
+ is_url = source.lower().startswith(('rtsp://', 'rtmp://', 'http://', 'https://'))
+ webcam = source.isnumeric() or source.endswith('.txt') or (is_url and not is_file)
+ if is_url and is_file:
+ source = check_file(source) # download
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ device = select_device(device)
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, names, pt = model.stride, model.names, model.pt
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+
+ # Dataloader
+ if webcam:
+ view_img = check_imshow()
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, transforms=classify_transforms(imgsz[0]))
+ bs = len(dataset) # batch_size
+ else:
+ dataset = LoadImages(source, img_size=imgsz, transforms=classify_transforms(imgsz[0]))
+ bs = 1 # batch_size
+ vid_path, vid_writer = [None] * bs, [None] * bs
+
+ # Run inference
+ model.warmup(imgsz=(1 if pt else bs, 3, *imgsz)) # warmup
+ seen, windows, dt = 0, [], (Profile(), Profile(), Profile())
+ for path, im, im0s, vid_cap, s in dataset:
+ with dt[0]:
+ im = torch.Tensor(im).to(device)
+ im = im.half() if model.fp16 else im.float() # uint8 to fp16/32
+ if len(im.shape) == 3:
+ im = im[None] # expand for batch dim
+
+ # Inference
+ with dt[1]:
+ results = model(im)
+
+ # Post-process
+ with dt[2]:
+ pred = F.softmax(results, dim=1) # probabilities
+
+ # Process predictions
+ for i, prob in enumerate(pred): # per image
+ seen += 1
+ if webcam: # batch_size >= 1
+ p, im0 = path[i], im0s[i].copy()
+ s += f'{i}: '
+ else:
+ p, im0 = path, im0s.copy()
+
+ p = Path(p) # to Path
+ save_path = str(save_dir / p.name) # im.jpg
+ s += '%gx%g ' % im.shape[2:] # print string
+ annotator = Annotator(im0, example=str(names), pil=True)
+
+ # Print results
+ top5i = prob.argsort(0, descending=True)[:5].tolist() # top 5 indices
+ s += f"{', '.join(f'{names[j]} {prob[j]:.2f}' for j in top5i)}, "
+
+ # Write results
+ if save_img or view_img: # Add bbox to image
+ text = '\n'.join(f'{prob[j]:.2f} {names[j]}' for j in top5i)
+ annotator.text((32, 32), text, txt_color=(255, 255, 255))
+
+ # Stream results
+ im0 = annotator.result()
+ if view_img:
+ if platform.system() == 'Linux' and p not in windows:
+ windows.append(p)
+ cv2.namedWindow(str(p), cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO) # allow window resize (Linux)
+ cv2.resizeWindow(str(p), im0.shape[1], im0.shape[0])
+ cv2.imshow(str(p), im0)
+ cv2.waitKey(1) # 1 millisecond
+
+ # Save results (image with detections)
+ if save_img:
+ if dataset.mode == 'image':
+ cv2.imwrite(save_path, im0)
+ else: # 'video' or 'stream'
+ if vid_path[i] != save_path: # new video
+ vid_path[i] = save_path
+ if isinstance(vid_writer[i], cv2.VideoWriter):
+ vid_writer[i].release() # release previous video writer
+ if vid_cap: # video
+ fps = vid_cap.get(cv2.CAP_PROP_FPS)
+ w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ else: # stream
+ fps, w, h = 30, im0.shape[1], im0.shape[0]
+ save_path = str(Path(save_path).with_suffix('.mp4')) # force *.mp4 suffix on results videos
+ vid_writer[i] = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
+ vid_writer[i].write(im0)
+
+ # Print time (inference-only)
+ LOGGER.info(f"{s}{dt[1].dt * 1E3:.1f}ms")
+
+ # Print results
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {(1, 3, *imgsz)}' % t)
+ if save_txt or save_img:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ if update:
+ strip_optimizer(weights[0]) # update model (to fix SourceChangeWarning)
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s-cls.pt', help='model path(s)')
+ parser.add_argument('--source', type=str, default=ROOT / 'data/images', help='file/dir/URL/glob, 0 for webcam')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='(optional) dataset.yaml path')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[224], help='inference size h,w')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--view-img', action='store_true', help='show results')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--visualize', action='store_true', help='visualize features')
+ parser.add_argument('--update', action='store_true', help='update all models')
+ parser.add_argument('--project', default=ROOT / 'runs/predict-cls', help='save results to project/name')
+ parser.add_argument('--name', default='exp', help='save results to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/seg/classify/train.py b/yolov7_seg/seg/classify/train.py
new file mode 100644
index 000000000..23a2ac2ae
--- /dev/null
+++ b/yolov7_seg/seg/classify/train.py
@@ -0,0 +1,331 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Train a YOLOv5 classifier model on a classification dataset
+
+Usage - Single-GPU training:
+ $ python classify/train.py --model yolov5s-cls.pt --data imagenette160 --epochs 5 --img 128
+
+Usage - Multi-GPU DDP training:
+ $ python -m torch.distributed.run --nproc_per_node 4 --master_port 1 classify/train.py --model yolov5s-cls.pt --data imagenet --epochs 5 --img 224 --device 0,1,2,3
+
+Datasets: --data mnist, fashion-mnist, cifar10, cifar100, imagenette, imagewoof, imagenet, or 'path/to/data'
+YOLOv5-cls models: --model yolov5n-cls.pt, yolov5s-cls.pt, yolov5m-cls.pt, yolov5l-cls.pt, yolov5x-cls.pt
+Torchvision models: --model resnet50, efficientnet_b0, etc. See https://pytorch.org/vision/stable/models.html
+"""
+
+import argparse
+import os
+import subprocess
+import sys
+import time
+from copy import deepcopy
+from datetime import datetime
+from pathlib import Path
+
+import torch
+import torch.distributed as dist
+import torch.hub as hub
+import torch.optim.lr_scheduler as lr_scheduler
+import torchvision
+from torch.cuda import amp
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from classify import val as validate
+from models.experimental import attempt_load
+from models.yolo import ClassificationModel, DetectionModel
+from utils.dataloaders import create_classification_dataloader
+from utils.general import (DATASETS_DIR, LOGGER, WorkingDirectory, check_git_status, check_requirements, colorstr,
+ download, increment_path, init_seeds, print_args, yaml_save)
+from utils.loggers import GenericLogger
+from utils.plots import imshow_cls
+from utils.torch_utils import (ModelEMA, model_info, reshape_classifier_output, select_device, smart_DDP,
+ smart_optimizer, smartCrossEntropyLoss, torch_distributed_zero_first)
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+
+def train(opt, device):
+ init_seeds(opt.seed + 1 + RANK, deterministic=True)
+ save_dir, data, bs, epochs, nw, imgsz, pretrained = \
+ opt.save_dir, Path(opt.data), opt.batch_size, opt.epochs, min(os.cpu_count() - 1, opt.workers), \
+ opt.imgsz, str(opt.pretrained).lower() == 'true'
+ cuda = device.type != 'cpu'
+
+ # Directories
+ wdir = save_dir / 'weights'
+ wdir.mkdir(parents=True, exist_ok=True) # make dir
+ last, best = wdir / 'last.pt', wdir / 'best.pt'
+
+ # Save run settings
+ yaml_save(save_dir / 'opt.yaml', vars(opt))
+
+ # Logger
+ logger = GenericLogger(opt=opt, console_logger=LOGGER) if RANK in {-1, 0} else None
+
+ # Download Dataset
+ with torch_distributed_zero_first(LOCAL_RANK), WorkingDirectory(ROOT):
+ data_dir = data if data.is_dir() else (DATASETS_DIR / data)
+ if not data_dir.is_dir():
+ LOGGER.info(f'\nDataset not found ⚠️, missing path {data_dir}, attempting download...')
+ t = time.time()
+ if str(data) == 'imagenet':
+ subprocess.run(f"bash {ROOT / 'data/scripts/get_imagenet.sh'}", shell=True, check=True)
+ else:
+ url = f'https://github.com/ultralytics/yolov5/releases/download/v1.0/{data}.zip'
+ download(url, dir=data_dir.parent)
+ s = f"Dataset download success ✅ ({time.time() - t:.1f}s), saved to {colorstr('bold', data_dir)}\n"
+ LOGGER.info(s)
+
+ # Dataloaders
+ nc = len([x for x in (data_dir / 'train').glob('*') if x.is_dir()]) # number of classes
+ trainloader = create_classification_dataloader(path=data_dir / 'train',
+ imgsz=imgsz,
+ batch_size=bs // WORLD_SIZE,
+ augment=True,
+ cache=opt.cache,
+ rank=LOCAL_RANK,
+ workers=nw)
+
+ test_dir = data_dir / 'test' if (data_dir / 'test').exists() else data_dir / 'val' # data/test or data/val
+ if RANK in {-1, 0}:
+ testloader = create_classification_dataloader(path=test_dir,
+ imgsz=imgsz,
+ batch_size=bs // WORLD_SIZE * 2,
+ augment=False,
+ cache=opt.cache,
+ rank=-1,
+ workers=nw)
+
+ # Model
+ with torch_distributed_zero_first(LOCAL_RANK), WorkingDirectory(ROOT):
+ if Path(opt.model).is_file() or opt.model.endswith('.pt'):
+ model = attempt_load(opt.model, device='cpu', fuse=False)
+ elif opt.model in torchvision.models.__dict__: # TorchVision models i.e. resnet50, efficientnet_b0
+ model = torchvision.models.__dict__[opt.model](weights='IMAGENET1K_V1' if pretrained else None)
+ else:
+ m = hub.list('ultralytics/yolov5') # + hub.list('pytorch/vision') # models
+ raise ModuleNotFoundError(f'--model {opt.model} not found. Available models are: \n' + '\n'.join(m))
+ if isinstance(model, DetectionModel):
+ LOGGER.warning("WARNING: pass YOLOv5 classifier model with '-cls' suffix, i.e. '--model yolov5s-cls.pt'")
+ model = ClassificationModel(model=model, nc=nc, cutoff=opt.cutoff or 10) # convert to classification model
+ reshape_classifier_output(model, nc) # update class count
+ for m in model.modules():
+ if not pretrained and hasattr(m, 'reset_parameters'):
+ m.reset_parameters()
+ if isinstance(m, torch.nn.Dropout) and opt.dropout is not None:
+ m.p = opt.dropout # set dropout
+ for p in model.parameters():
+ p.requires_grad = True # for training
+ model = model.to(device)
+
+ # Info
+ if RANK in {-1, 0}:
+ model.names = trainloader.dataset.classes # attach class names
+ model.transforms = testloader.dataset.torch_transforms # attach inference transforms
+ model_info(model)
+ if opt.verbose:
+ LOGGER.info(model)
+ images, labels = next(iter(trainloader))
+ file = imshow_cls(images[:25], labels[:25], names=model.names, f=save_dir / 'train_images.jpg')
+ logger.log_images(file, name='Train Examples')
+ logger.log_graph(model, imgsz) # log model
+
+ # Optimizer
+ optimizer = smart_optimizer(model, opt.optimizer, opt.lr0, momentum=0.9, decay=opt.decay)
+
+ # Scheduler
+ lrf = 0.01 # final lr (fraction of lr0)
+ # lf = lambda x: ((1 + math.cos(x * math.pi / epochs)) / 2) * (1 - lrf) + lrf # cosine
+ lf = lambda x: (1 - x / epochs) * (1 - lrf) + lrf # linear
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
+ # scheduler = lr_scheduler.OneCycleLR(optimizer, max_lr=lr0, total_steps=epochs, pct_start=0.1,
+ # final_div_factor=1 / 25 / lrf)
+
+ # EMA
+ ema = ModelEMA(model) if RANK in {-1, 0} else None
+
+ # DDP mode
+ if cuda and RANK != -1:
+ model = smart_DDP(model)
+
+ # Train
+ t0 = time.time()
+ criterion = smartCrossEntropyLoss(label_smoothing=opt.label_smoothing) # loss function
+ best_fitness = 0.0
+ scaler = amp.GradScaler(enabled=cuda)
+ val = test_dir.stem # 'val' or 'test'
+ LOGGER.info(f'Image sizes {imgsz} train, {imgsz} test\n'
+ f'Using {nw * WORLD_SIZE} dataloader workers\n'
+ f"Logging results to {colorstr('bold', save_dir)}\n"
+ f'Starting {opt.model} training on {data} dataset with {nc} classes for {epochs} epochs...\n\n'
+ f"{'Epoch':>10}{'GPU_mem':>10}{'train_loss':>12}{f'{val}_loss':>12}{'top1_acc':>12}{'top5_acc':>12}")
+ for epoch in range(epochs): # loop over the dataset multiple times
+ tloss, vloss, fitness = 0.0, 0.0, 0.0 # train loss, val loss, fitness
+ model.train()
+ if RANK != -1:
+ trainloader.sampler.set_epoch(epoch)
+ pbar = enumerate(trainloader)
+ if RANK in {-1, 0}:
+ pbar = tqdm(enumerate(trainloader), total=len(trainloader), bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}')
+ for i, (images, labels) in pbar: # progress bar
+ images, labels = images.to(device, non_blocking=True), labels.to(device)
+
+ # Forward
+ with amp.autocast(enabled=cuda): # stability issues when enabled
+ loss = criterion(model(images), labels)
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize
+ scaler.unscale_(optimizer) # unscale gradients
+ torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=10.0) # clip gradients
+ scaler.step(optimizer)
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+
+ if RANK in {-1, 0}:
+ # Print
+ tloss = (tloss * i + loss.item()) / (i + 1) # update mean losses
+ mem = '%.3gG' % (torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0) # (GB)
+ pbar.desc = f"{f'{epoch + 1}/{epochs}':>10}{mem:>10}{tloss:>12.3g}" + ' ' * 36
+
+ # Test
+ if i == len(pbar) - 1: # last batch
+ top1, top5, vloss = validate.run(model=ema.ema,
+ dataloader=testloader,
+ criterion=criterion,
+ pbar=pbar) # test accuracy, loss
+ fitness = top1 # define fitness as top1 accuracy
+
+ # Scheduler
+ scheduler.step()
+
+ # Log metrics
+ if RANK in {-1, 0}:
+ # Best fitness
+ if fitness > best_fitness:
+ best_fitness = fitness
+
+ # Log
+ metrics = {
+ "train/loss": tloss,
+ f"{val}/loss": vloss,
+ "metrics/accuracy_top1": top1,
+ "metrics/accuracy_top5": top5,
+ "lr/0": optimizer.param_groups[0]['lr']} # learning rate
+ logger.log_metrics(metrics, epoch)
+
+ # Save model
+ final_epoch = epoch + 1 == epochs
+ if (not opt.nosave) or final_epoch:
+ ckpt = {
+ 'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'model': deepcopy(ema.ema).half(), # deepcopy(de_parallel(model)).half(),
+ 'ema': None, # deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': None, # optimizer.state_dict(),
+ 'opt': vars(opt),
+ 'date': datetime.now().isoformat()}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fitness:
+ torch.save(ckpt, best)
+ del ckpt
+
+ # Train complete
+ if RANK in {-1, 0} and final_epoch:
+ LOGGER.info(f'\nTraining complete ({(time.time() - t0) / 3600:.3f} hours)'
+ f"\nResults saved to {colorstr('bold', save_dir)}"
+ f"\nPredict: python classify/predict.py --weights {best} --source im.jpg"
+ f"\nValidate: python classify/val.py --weights {best} --data {data_dir}"
+ f"\nExport: python export.py --weights {best} --include onnx"
+ f"\nPyTorch Hub: model = torch.hub.load('ultralytics/yolov5', 'custom', '{best}')"
+ f"\nVisualize: https://netron.app\n")
+
+ # Plot examples
+ images, labels = (x[:25] for x in next(iter(testloader))) # first 25 images and labels
+ pred = torch.max(ema.ema(images.to(device)), 1)[1]
+ file = imshow_cls(images, labels, pred, model.names, verbose=False, f=save_dir / 'test_images.jpg')
+
+ # Log results
+ meta = {"epochs": epochs, "top1_acc": best_fitness, "date": datetime.now().isoformat()}
+ logger.log_images(file, name='Test Examples (true-predicted)', epoch=epoch)
+ logger.log_model(best, epochs, metadata=meta)
+
+
+def parse_opt(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--model', type=str, default='yolov5s-cls.pt', help='initial weights path')
+ parser.add_argument('--data', type=str, default='imagenette160', help='cifar10, cifar100, mnist, imagenet, ...')
+ parser.add_argument('--epochs', type=int, default=10, help='total training epochs')
+ parser.add_argument('--batch-size', type=int, default=64, help='total batch size for all GPUs')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=128, help='train, val image size (pixels)')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default=ROOT / 'runs/train-cls', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--pretrained', nargs='?', const=True, default=True, help='start from i.e. --pretrained False')
+ parser.add_argument('--optimizer', choices=['SGD', 'Adam', 'AdamW', 'RMSProp'], default='Adam', help='optimizer')
+ parser.add_argument('--lr0', type=float, default=0.001, help='initial learning rate')
+ parser.add_argument('--decay', type=float, default=5e-5, help='weight decay')
+ parser.add_argument('--label-smoothing', type=float, default=0.1, help='Label smoothing epsilon')
+ parser.add_argument('--cutoff', type=int, default=None, help='Model layer cutoff index for Classify() head')
+ parser.add_argument('--dropout', type=float, default=None, help='Dropout (fraction)')
+ parser.add_argument('--verbose', action='store_true', help='Verbose mode')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def main(opt):
+ # Checks
+ if RANK in {-1, 0}:
+ print_args(vars(opt))
+ check_git_status()
+ check_requirements()
+
+ # DDP mode
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if LOCAL_RANK != -1:
+ assert opt.batch_size != -1, 'AutoBatch is coming soon for classification, please pass a valid --batch-size'
+ assert opt.batch_size % WORLD_SIZE == 0, f'--batch-size {opt.batch_size} must be multiple of WORLD_SIZE'
+ assert torch.cuda.device_count() > LOCAL_RANK, 'insufficient CUDA devices for DDP command'
+ torch.cuda.set_device(LOCAL_RANK)
+ device = torch.device('cuda', LOCAL_RANK)
+ dist.init_process_group(backend="nccl" if dist.is_nccl_available() else "gloo")
+
+ # Parameters
+ opt.save_dir = increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok) # increment run
+
+ # Train
+ train(opt, device)
+
+
+def run(**kwargs):
+ # Usage: from yolov5 import classify; classify.train.run(data=mnist, imgsz=320, model='yolov5m')
+ opt = parse_opt(True)
+ for k, v in kwargs.items():
+ setattr(opt, k, v)
+ main(opt)
+ return opt
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/seg/classify/val.py b/yolov7_seg/seg/classify/val.py
new file mode 100644
index 000000000..ef112bae0
--- /dev/null
+++ b/yolov7_seg/seg/classify/val.py
@@ -0,0 +1,168 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a trained YOLOv5 classification model on a classification dataset
+
+Usage:
+ $ bash data/scripts/get_imagenet.sh --val # download ImageNet val split (6.3G, 50000 images)
+ $ python classify/val.py --weights yolov5m-cls.pt --data ../datasets/imagenet --img 224 # validate ImageNet
+
+Usage - formats:
+ $ python classify/val.py --weights yolov5s-cls.pt # PyTorch
+ yolov5s-cls.torchscript # TorchScript
+ yolov5s-cls.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s-cls.xml # OpenVINO
+ yolov5s-cls.engine # TensorRT
+ yolov5s-cls.mlmodel # CoreML (macOS-only)
+ yolov5s-cls_saved_model # TensorFlow SavedModel
+ yolov5s-cls.pb # TensorFlow GraphDef
+ yolov5s-cls.tflite # TensorFlow Lite
+ yolov5s-cls_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import os
+import sys
+from pathlib import Path
+
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.dataloaders import create_classification_dataloader
+from utils.general import LOGGER, Profile, check_img_size, check_requirements, colorstr, increment_path, print_args
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+@smart_inference_mode()
+def run(
+ data=ROOT / '../datasets/mnist', # dataset dir
+ weights=ROOT / 'yolov5s-cls.pt', # model.pt path(s)
+ batch_size=128, # batch size
+ imgsz=224, # inference size (pixels)
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ workers=8, # max dataloader workers (per RANK in DDP mode)
+ verbose=False, # verbose output
+ project=ROOT / 'runs/val-cls', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ model=None,
+ dataloader=None,
+ criterion=None,
+ pbar=None,
+):
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ model.half() if half else model.float()
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ save_dir.mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ if engine:
+ batch_size = model.batch_size
+ else:
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
+
+ # Dataloader
+ data = Path(data)
+ test_dir = data / 'test' if (data / 'test').exists() else data / 'val' # data/test or data/val
+ dataloader = create_classification_dataloader(path=test_dir,
+ imgsz=imgsz,
+ batch_size=batch_size,
+ augment=False,
+ rank=-1,
+ workers=workers)
+
+ model.eval()
+ pred, targets, loss, dt = [], [], 0, (Profile(), Profile(), Profile())
+ n = len(dataloader) # number of batches
+ action = 'validating' if dataloader.dataset.root.stem == 'val' else 'testing'
+ desc = f"{pbar.desc[:-36]}{action:>36}" if pbar else f"{action}"
+ bar = tqdm(dataloader, desc, n, not training, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}', position=0)
+ with torch.cuda.amp.autocast(enabled=device.type != 'cpu'):
+ for images, labels in bar:
+ with dt[0]:
+ images, labels = images.to(device, non_blocking=True), labels.to(device)
+
+ with dt[1]:
+ y = model(images)
+
+ with dt[2]:
+ pred.append(y.argsort(1, descending=True)[:, :5])
+ targets.append(labels)
+ if criterion:
+ loss += criterion(y, labels)
+
+ loss /= n
+ pred, targets = torch.cat(pred), torch.cat(targets)
+ correct = (targets[:, None] == pred).float()
+ acc = torch.stack((correct[:, 0], correct.max(1).values), dim=1) # (top1, top5) accuracy
+ top1, top5 = acc.mean(0).tolist()
+
+ if pbar:
+ pbar.desc = f"{pbar.desc[:-36]}{loss:>12.3g}{top1:>12.3g}{top5:>12.3g}"
+ if verbose: # all classes
+ LOGGER.info(f"{'Class':>24}{'Images':>12}{'top1_acc':>12}{'top5_acc':>12}")
+ LOGGER.info(f"{'all':>24}{targets.shape[0]:>12}{top1:>12.3g}{top5:>12.3g}")
+ for i, c in model.names.items():
+ aci = acc[targets == i]
+ top1i, top5i = aci.mean(0).tolist()
+ LOGGER.info(f"{c:>24}{aci.shape[0]:>12}{top1i:>12.3g}{top5i:>12.3g}")
+
+ # Print results
+ t = tuple(x.t / len(dataloader.dataset.samples) * 1E3 for x in dt) # speeds per image
+ shape = (1, 3, imgsz, imgsz)
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms post-process per image at shape {shape}' % t)
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}")
+
+ return top1, top5, loss
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / '../datasets/mnist', help='dataset path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s-cls.pt', help='model.pt path(s)')
+ parser.add_argument('--batch-size', type=int, default=128, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=224, help='inference size (pixels)')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--verbose', nargs='?', const=True, default=True, help='verbose output')
+ parser.add_argument('--project', default=ROOT / 'runs/val-cls', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/seg/data/coco.yaml b/yolov7_seg/seg/data/coco.yaml
new file mode 100644
index 000000000..04d5b9870
--- /dev/null
+++ b/yolov7_seg/seg/data/coco.yaml
@@ -0,0 +1,116 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# COCO 2017 dataset http://cocodataset.org by Microsoft
+# Example usage: python train.py --data coco.yaml
+# parent
+# ├── yolov5
+# └── datasets
+# └── coco ← downloads here (20.1 GB)
+
+
+# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
+path: ../datasets/coco # dataset root dir
+train: train2017.txt # train images (relative to 'path') 118287 images
+val: val2017.txt # val images (relative to 'path') 5000 images
+test: test-dev2017.txt # 20288 of 40670 images, submit to https://competitions.codalab.org/competitions/20794
+
+# Classes
+names:
+ 0: person
+ 1: bicycle
+ 2: car
+ 3: motorcycle
+ 4: airplane
+ 5: bus
+ 6: train
+ 7: truck
+ 8: boat
+ 9: traffic light
+ 10: fire hydrant
+ 11: stop sign
+ 12: parking meter
+ 13: bench
+ 14: bird
+ 15: cat
+ 16: dog
+ 17: horse
+ 18: sheep
+ 19: cow
+ 20: elephant
+ 21: bear
+ 22: zebra
+ 23: giraffe
+ 24: backpack
+ 25: umbrella
+ 26: handbag
+ 27: tie
+ 28: suitcase
+ 29: frisbee
+ 30: skis
+ 31: snowboard
+ 32: sports ball
+ 33: kite
+ 34: baseball bat
+ 35: baseball glove
+ 36: skateboard
+ 37: surfboard
+ 38: tennis racket
+ 39: bottle
+ 40: wine glass
+ 41: cup
+ 42: fork
+ 43: knife
+ 44: spoon
+ 45: bowl
+ 46: banana
+ 47: apple
+ 48: sandwich
+ 49: orange
+ 50: broccoli
+ 51: carrot
+ 52: hot dog
+ 53: pizza
+ 54: donut
+ 55: cake
+ 56: chair
+ 57: couch
+ 58: potted plant
+ 59: bed
+ 60: dining table
+ 61: toilet
+ 62: tv
+ 63: laptop
+ 64: mouse
+ 65: remote
+ 66: keyboard
+ 67: cell phone
+ 68: microwave
+ 69: oven
+ 70: toaster
+ 71: sink
+ 72: refrigerator
+ 73: book
+ 74: clock
+ 75: vase
+ 76: scissors
+ 77: teddy bear
+ 78: hair drier
+ 79: toothbrush
+
+
+# Download script/URL (optional)
+download: |
+ from utils.general import download, Path
+
+
+ # Download labels
+ segments = False # segment or box labels
+ dir = Path(yaml['path']) # dataset root dir
+ url = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/'
+ urls = [url + ('coco2017labels-segments.zip' if segments else 'coco2017labels.zip')] # labels
+ download(urls, dir=dir.parent)
+
+ # Download data
+ urls = ['http://images.cocodataset.org/zips/train2017.zip', # 19G, 118k images
+ 'http://images.cocodataset.org/zips/val2017.zip', # 1G, 5k images
+ 'http://images.cocodataset.org/zips/test2017.zip'] # 7G, 41k images (optional)
+ download(urls, dir=dir / 'images', threads=3)
diff --git a/yolov7_seg/seg/data/hyps/hyp.scratch-high.yaml b/yolov7_seg/seg/data/hyps/hyp.scratch-high.yaml
new file mode 100644
index 000000000..9ba0d0826
--- /dev/null
+++ b/yolov7_seg/seg/data/hyps/hyp.scratch-high.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for high-augmentation COCO training from scratch
+# python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.3 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 0.7 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.9 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.1 # image mixup (probability)
+copy_paste: 0.1 # segment copy-paste (probability)
diff --git a/yolov7_seg/seg/data/hyps/hyp.scratch-low.yaml b/yolov7_seg/seg/data/hyps/hyp.scratch-low.yaml
new file mode 100644
index 000000000..dcf0f6495
--- /dev/null
+++ b/yolov7_seg/seg/data/hyps/hyp.scratch-low.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for low-augmentation COCO training from scratch
+# python train.py --batch 64 --cfg yolov5n6.yaml --weights '' --data coco.yaml --img 640 --epochs 300 --linear
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.01 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.5 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 1.0 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.5 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.0 # image mixup (probability)
+copy_paste: 0.0 # segment copy-paste (probability)
diff --git a/yolov7_seg/seg/data/hyps/hyp.scratch-med.yaml b/yolov7_seg/seg/data/hyps/hyp.scratch-med.yaml
new file mode 100644
index 000000000..6dcfc2dc1
--- /dev/null
+++ b/yolov7_seg/seg/data/hyps/hyp.scratch-med.yaml
@@ -0,0 +1,34 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters for medium-augmentation COCO training from scratch
+# python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
+# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.3 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 0.7 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
+hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0.4 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0.1 # image translation (+/- fraction)
+scale: 0.9 # image scale (+/- gain)
+shear: 0.0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.5 # image flip left-right (probability)
+mosaic: 1.0 # image mosaic (probability)
+mixup: 0.1 # image mixup (probability)
+copy_paste: 0.0 # segment copy-paste (probability)
diff --git a/yolov7_seg/seg/data/scripts/get_coco.sh b/yolov7_seg/seg/data/scripts/get_coco.sh
new file mode 100644
index 000000000..eb77e81e9
--- /dev/null
+++ b/yolov7_seg/seg/data/scripts/get_coco.sh
@@ -0,0 +1,56 @@
+#!/bin/bash
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Download COCO 2017 dataset http://cocodataset.org
+# Example usage: bash data/scripts/get_coco.sh
+# parent
+# ├── yolov5
+# └── datasets
+# └── coco ← downloads here
+
+# Arguments (optional) Usage: bash data/scripts/get_coco.sh --train --val --test --segments
+if [ "$#" -gt 0 ]; then
+ for opt in "$@"; do
+ case "${opt}" in
+ --train) train=true ;;
+ --val) val=true ;;
+ --test) test=true ;;
+ --segments) segments=true ;;
+ esac
+ done
+else
+ train=true
+ val=true
+ test=false
+ segments=false
+fi
+
+# Download/unzip labels
+d='../datasets' # unzip directory
+url=https://github.com/ultralytics/yolov5/releases/download/v1.0/
+if [ "$segments" == "true" ]; then
+ f='coco2017labels-segments.zip' # 168 MB
+else
+ f='coco2017labels.zip' # 168 MB
+fi
+echo 'Downloading' $url$f ' ...'
+curl -L $url$f -o $f -# && unzip -q $f -d $d && rm $f &
+
+# Download/unzip images
+d='../datasets/coco/images' # unzip directory
+url=http://images.cocodataset.org/zips/
+if [ "$train" == "true" ]; then
+ f='train2017.zip' # 19G, 118k images
+ echo 'Downloading' $url$f '...'
+ curl -L $url$f -o $f -# && unzip -q $f -d $d && rm $f &
+fi
+if [ "$val" == "true" ]; then
+ f='val2017.zip' # 1G, 5k images
+ echo 'Downloading' $url$f '...'
+ curl -L $url$f -o $f -# && unzip -q $f -d $d && rm $f &
+fi
+if [ "$test" == "true" ]; then
+ f='test2017.zip' # 7G, 41k images (optional)
+ echo 'Downloading' $url$f '...'
+ curl -L $url$f -o $f -# && unzip -q $f -d $d && rm $f &
+fi
+wait # finish background tasks
diff --git a/yolov7_seg/seg/data/scripts/get_imagenet.sh b/yolov7_seg/seg/data/scripts/get_imagenet.sh
new file mode 100644
index 000000000..0c287d52c
--- /dev/null
+++ b/yolov7_seg/seg/data/scripts/get_imagenet.sh
@@ -0,0 +1,51 @@
+#!/bin/bash
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Download ILSVRC2012 ImageNet dataset https://image-net.org
+# Example usage: bash data/scripts/get_imagenet.sh
+# parent
+# ├── yolov5
+# └── datasets
+# └── imagenet ← downloads here
+
+# Arguments (optional) Usage: bash data/scripts/get_imagenet.sh --train --val
+if [ "$#" -gt 0 ]; then
+ for opt in "$@"; do
+ case "${opt}" in
+ --train) train=true ;;
+ --val) val=true ;;
+ esac
+ done
+else
+ train=true
+ val=true
+fi
+
+# Make dir
+d='../datasets/imagenet' # unzip directory
+mkdir -p $d && cd $d
+
+# Download/unzip train
+if [ "$train" == "true" ]; then
+ wget https://image-net.org/data/ILSVRC/2012/ILSVRC2012_img_train.tar # download 138G, 1281167 images
+ mkdir train && mv ILSVRC2012_img_train.tar train/ && cd train
+ tar -xf ILSVRC2012_img_train.tar && rm -f ILSVRC2012_img_train.tar
+ find . -name "*.tar" | while read NAME; do
+ mkdir -p "${NAME%.tar}"
+ tar -xf "${NAME}" -C "${NAME%.tar}"
+ rm -f "${NAME}"
+ done
+ cd ..
+fi
+
+# Download/unzip val
+if [ "$val" == "true" ]; then
+ wget https://image-net.org/data/ILSVRC/2012/ILSVRC2012_img_val.tar # download 6.3G, 50000 images
+ mkdir val && mv ILSVRC2012_img_val.tar val/ && cd val && tar -xf ILSVRC2012_img_val.tar
+ wget -qO- https://raw.githubusercontent.com/soumith/imagenetloader.torch/master/valprep.sh | bash # move into subdirs
+fi
+
+# Delete corrupted image (optional: PNG under JPEG name that may cause dataloaders to fail)
+# rm train/n04266014/n04266014_10835.JPEG
+
+# TFRecords (optional)
+# wget https://raw.githubusercontent.com/tensorflow/models/master/research/slim/datasets/imagenet_lsvrc_2015_synsets.txt
diff --git a/yolov7_seg/seg/detect.py b/yolov7_seg/seg/detect.py
new file mode 100644
index 000000000..63ef69984
--- /dev/null
+++ b/yolov7_seg/seg/detect.py
@@ -0,0 +1,254 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run YOLOv5 detection inference on images, videos, directories, globs, YouTube, webcam, streams, etc.
+
+Usage - sources:
+ $ python detect.py --weights yolov5s.pt --source 0 # webcam
+ img.jpg # image
+ vid.mp4 # video
+ path/ # directory
+ 'path/*.jpg' # glob
+ 'https://youtu.be/Zgi9g1ksQHc' # YouTube
+ 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
+
+Usage - formats:
+ $ python detect.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import os
+import platform
+import sys
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.dataloaders import IMG_FORMATS, VID_FORMATS, LoadImages, LoadStreams
+from utils.general import (LOGGER, Profile, check_file, check_img_size, check_imshow, check_requirements, colorstr, cv2,
+ increment_path, non_max_suppression, print_args, scale_coords, strip_optimizer, xyxy2xywh)
+from utils.plots import Annotator, colors, save_one_box
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+@smart_inference_mode()
+def run(
+ weights=ROOT / 'yolov5s.pt', # model.pt path(s)
+ source=ROOT / 'data/images', # file/dir/URL/glob, 0 for webcam
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ imgsz=(640, 640), # inference size (height, width)
+ conf_thres=0.25, # confidence threshold
+ iou_thres=0.45, # NMS IOU threshold
+ max_det=1000, # maximum detections per image
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ view_img=False, # show results
+ save_txt=False, # save results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_crop=False, # save cropped prediction boxes
+ nosave=False, # do not save images/videos
+ classes=None, # filter by class: --class 0, or --class 0 2 3
+ agnostic_nms=False, # class-agnostic NMS
+ augment=False, # augmented inference
+ visualize=False, # visualize features
+ update=False, # update all models
+ project=ROOT / 'runs/detect', # save results to project/name
+ name='exp', # save results to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ line_thickness=3, # bounding box thickness (pixels)
+ hide_labels=False, # hide labels
+ hide_conf=False, # hide confidences
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+):
+ source = str(source)
+ save_img = not nosave and not source.endswith('.txt') # save inference images
+ is_file = Path(source).suffix[1:] in (IMG_FORMATS + VID_FORMATS)
+ is_url = source.lower().startswith(('rtsp://', 'rtmp://', 'http://', 'https://'))
+ webcam = source.isnumeric() or source.endswith('.txt') or (is_url and not is_file)
+ if is_url and is_file:
+ source = check_file(source) # download
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ device = select_device(device)
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, names, pt = model.stride, model.names, model.pt
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+
+ # Dataloader
+ if webcam:
+ view_img = check_imshow()
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride, auto=pt)
+ bs = len(dataset) # batch_size
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt)
+ bs = 1 # batch_size
+ vid_path, vid_writer = [None] * bs, [None] * bs
+
+ # Run inference
+ model.warmup(imgsz=(1 if pt else bs, 3, *imgsz)) # warmup
+ seen, windows, dt = 0, [], (Profile(), Profile(), Profile())
+ for path, im, im0s, vid_cap, s in dataset:
+ with dt[0]:
+ im = torch.from_numpy(im).to(device)
+ im = im.half() if model.fp16 else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ if len(im.shape) == 3:
+ im = im[None] # expand for batch dim
+
+ # Inference
+ with dt[1]:
+ visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False
+ pred = model(im, augment=augment, visualize=visualize)
+
+ # NMS
+ with dt[2]:
+ pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det)
+
+ # Second-stage classifier (optional)
+ # pred = utils.general.apply_classifier(pred, classifier_model, im, im0s)
+
+ # Process predictions
+ for i, det in enumerate(pred): # per image
+ seen += 1
+ if webcam: # batch_size >= 1
+ p, im0, frame = path[i], im0s[i].copy(), dataset.count
+ s += f'{i}: '
+ else:
+ p, im0, frame = path, im0s.copy(), getattr(dataset, 'frame', 0)
+
+ p = Path(p) # to Path
+ save_path = str(save_dir / p.name) # im.jpg
+ txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # im.txt
+ s += '%gx%g ' % im.shape[2:] # print string
+ gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
+ imc = im0.copy() if save_crop else im0 # for save_crop
+ annotator = Annotator(im0, line_width=line_thickness, example=str(names))
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(im.shape[2:], det[:, :4], im0.shape).round()
+
+ # Print results
+ for c in det[:, 5].unique():
+ n = (det[:, 5] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ if save_txt: # Write to file
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(f'{txt_path}.txt', 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+ if save_img or save_crop or view_img: # Add bbox to image
+ c = int(cls) # integer class
+ label = None if hide_labels else (names[c] if hide_conf else f'{names[c]} {conf:.2f}')
+ annotator.box_label(xyxy, label, color=colors(c, True))
+ if save_crop:
+ save_one_box(xyxy, imc, file=save_dir / 'crops' / names[c] / f'{p.stem}.jpg', BGR=True)
+
+ # Stream results
+ im0 = annotator.result()
+ if view_img:
+ if platform.system() == 'Linux' and p not in windows:
+ windows.append(p)
+ cv2.namedWindow(str(p), cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO) # allow window resize (Linux)
+ cv2.resizeWindow(str(p), im0.shape[1], im0.shape[0])
+ cv2.imshow(str(p), im0)
+ cv2.waitKey(1) # 1 millisecond
+
+ # Save results (image with detections)
+ if save_img:
+ if dataset.mode == 'image':
+ cv2.imwrite(save_path, im0)
+ else: # 'video' or 'stream'
+ if vid_path[i] != save_path: # new video
+ vid_path[i] = save_path
+ if isinstance(vid_writer[i], cv2.VideoWriter):
+ vid_writer[i].release() # release previous video writer
+ if vid_cap: # video
+ fps = vid_cap.get(cv2.CAP_PROP_FPS)
+ w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ else: # stream
+ fps, w, h = 30, im0.shape[1], im0.shape[0]
+ save_path = str(Path(save_path).with_suffix('.mp4')) # force *.mp4 suffix on results videos
+ vid_writer[i] = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
+ vid_writer[i].write(im0)
+
+ # Print time (inference-only)
+ LOGGER.info(f"{s}{'' if len(det) else '(no detections), '}{dt[1].dt * 1E3:.1f}ms")
+
+ # Print results
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {(1, 3, *imgsz)}' % t)
+ if save_txt or save_img:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ if update:
+ strip_optimizer(weights[0]) # update model (to fix SourceChangeWarning)
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)')
+ parser.add_argument('--source', type=str, default=ROOT / 'data/images', help='file/dir/URL/glob, 0 for webcam')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='(optional) dataset.yaml path')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=1000, help='maximum detections per image')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--view-img', action='store_true', help='show results')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-crop', action='store_true', help='save cropped prediction boxes')
+ parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
+ parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --classes 0, or --classes 0 2 3')
+ parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--visualize', action='store_true', help='visualize features')
+ parser.add_argument('--update', action='store_true', help='update all models')
+ parser.add_argument('--project', default=ROOT / 'runs/detect', help='save results to project/name')
+ parser.add_argument('--name', default='exp', help='save results to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--line-thickness', default=3, type=int, help='bounding box thickness (pixels)')
+ parser.add_argument('--hide-labels', default=False, action='store_true', help='hide labels')
+ parser.add_argument('--hide-conf', default=False, action='store_true', help='hide confidences')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/seg/export.py b/yolov7_seg/seg/export.py
new file mode 100644
index 000000000..da188d3f7
--- /dev/null
+++ b/yolov7_seg/seg/export.py
@@ -0,0 +1,594 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Export a YOLOv5 PyTorch model to other formats. TensorFlow exports authored by https://github.com/zldrobit
+
+Format | `export.py --include` | Model
+--- | --- | ---
+PyTorch | - | yolov5s.pt
+TorchScript | `torchscript` | yolov5s.torchscript
+ONNX | `onnx` | yolov5s.onnx
+OpenVINO | `openvino` | yolov5s_openvino_model/
+TensorRT | `engine` | yolov5s.engine
+CoreML | `coreml` | yolov5s.mlmodel
+TensorFlow SavedModel | `saved_model` | yolov5s_saved_model/
+TensorFlow GraphDef | `pb` | yolov5s.pb
+TensorFlow Lite | `tflite` | yolov5s.tflite
+TensorFlow Edge TPU | `edgetpu` | yolov5s_edgetpu.tflite
+TensorFlow.js | `tfjs` | yolov5s_web_model/
+
+Requirements:
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu # CPU
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime-gpu openvino-dev tensorflow # GPU
+
+Usage:
+ $ python export.py --weights yolov5s.pt --include torchscript onnx openvino engine coreml tflite ...
+
+Inference:
+ $ python detect.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+
+TensorFlow.js:
+ $ cd .. && git clone https://github.com/zldrobit/tfjs-yolov5-example.git && cd tfjs-yolov5-example
+ $ npm install
+ $ ln -s ../../yolov5/yolov5s_web_model public/yolov5s_web_model
+ $ npm start
+"""
+
+import argparse
+import json
+import os
+import platform
+import subprocess
+import sys
+import time
+import warnings
+from pathlib import Path
+
+import pandas as pd
+import torch
+import yaml
+from torch.utils.mobile_optimizer import optimize_for_mobile
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+if platform.system() != 'Windows':
+ ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.experimental import attempt_load
+from models.yolo import Detect
+from utils.dataloaders import LoadImages
+from utils.general import (LOGGER, Profile, check_dataset, check_img_size, check_requirements, check_version,
+ check_yaml, colorstr, file_size, get_default_args, print_args, url2file)
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+def export_formats():
+ # YOLOv5 export formats
+ x = [
+ ['PyTorch', '-', '.pt', True, True],
+ ['TorchScript', 'torchscript', '.torchscript', True, True],
+ ['ONNX', 'onnx', '.onnx', True, True],
+ ['OpenVINO', 'openvino', '_openvino_model', True, False],
+ ['TensorRT', 'engine', '.engine', False, True],
+ ['CoreML', 'coreml', '.mlmodel', True, False],
+ ['TensorFlow SavedModel', 'saved_model', '_saved_model', True, True],
+ ['TensorFlow GraphDef', 'pb', '.pb', True, True],
+ ['TensorFlow Lite', 'tflite', '.tflite', True, False],
+ ['TensorFlow Edge TPU', 'edgetpu', '_edgetpu.tflite', False, False],
+ ['TensorFlow.js', 'tfjs', '_web_model', False, False],]
+ return pd.DataFrame(x, columns=['Format', 'Argument', 'Suffix', 'CPU', 'GPU'])
+
+
+def try_export(inner_func):
+ # YOLOv5 export decorator, i..e @try_export
+ inner_args = get_default_args(inner_func)
+
+ def outer_func(*args, **kwargs):
+ prefix = inner_args['prefix']
+ try:
+ with Profile() as dt:
+ f, model = inner_func(*args, **kwargs)
+ LOGGER.info(f'{prefix} export success ✅ {dt.t:.1f}s, saved as {f} ({file_size(f):.1f} MB)')
+ return f, model
+ except Exception as e:
+ LOGGER.info(f'{prefix} export failure ❌ {dt.t:.1f}s: {e}')
+ return None, None
+
+ return outer_func
+
+
+@try_export
+def export_torchscript(model, im, file, optimize, prefix=colorstr('TorchScript:')):
+ # YOLOv5 TorchScript model export
+ LOGGER.info(f'\n{prefix} starting export with torch {torch.__version__}...')
+ f = file.with_suffix('.torchscript')
+
+ ts = torch.jit.trace(model, im, strict=False)
+ d = {"shape": im.shape, "stride": int(max(model.stride)), "names": model.names}
+ extra_files = {'config.txt': json.dumps(d)} # torch._C.ExtraFilesMap()
+ if optimize: # https://pytorch.org/tutorials/recipes/mobile_interpreter.html
+ optimize_for_mobile(ts)._save_for_lite_interpreter(str(f), _extra_files=extra_files)
+ else:
+ ts.save(str(f), _extra_files=extra_files)
+ return f, None
+
+
+@try_export
+def export_onnx(model, im, file, opset, train, dynamic, simplify, prefix=colorstr('ONNX:')):
+ # YOLOv5 ONNX export
+ check_requirements(('onnx',))
+ import onnx
+
+ LOGGER.info(f'\n{prefix} starting export with onnx {onnx.__version__}...')
+ f = file.with_suffix('.onnx')
+
+ torch.onnx.export(
+ model.cpu() if dynamic else model, # --dynamic only compatible with cpu
+ im.cpu() if dynamic else im,
+ f,
+ verbose=False,
+ opset_version=opset,
+ training=torch.onnx.TrainingMode.TRAINING if train else torch.onnx.TrainingMode.EVAL,
+ do_constant_folding=not train,
+ input_names=['images'],
+ output_names=['output'],
+ dynamic_axes={
+ 'images': {
+ 0: 'batch',
+ 2: 'height',
+ 3: 'width'}, # shape(1,3,640,640)
+ 'output': {
+ 0: 'batch',
+ 1: 'anchors'} # shape(1,25200,85)
+ } if dynamic else None)
+
+ # Checks
+ model_onnx = onnx.load(f) # load onnx model
+ onnx.checker.check_model(model_onnx) # check onnx model
+
+ # Metadata
+ d = {'stride': int(max(model.stride)), 'names': model.names}
+ for k, v in d.items():
+ meta = model_onnx.metadata_props.add()
+ meta.key, meta.value = k, str(v)
+ onnx.save(model_onnx, f)
+
+ # Simplify
+ if simplify:
+ try:
+ cuda = torch.cuda.is_available()
+ check_requirements(('onnxruntime-gpu' if cuda else 'onnxruntime', 'onnx-simplifier>=0.4.1'))
+ import onnxsim
+
+ LOGGER.info(f'{prefix} simplifying with onnx-simplifier {onnxsim.__version__}...')
+ model_onnx, check = onnxsim.simplify(model_onnx)
+ assert check, 'assert check failed'
+ onnx.save(model_onnx, f)
+ except Exception as e:
+ LOGGER.info(f'{prefix} simplifier failure: {e}')
+ return f, model_onnx
+
+
+@try_export
+def export_openvino(model, file, half, prefix=colorstr('OpenVINO:')):
+ # YOLOv5 OpenVINO export
+ check_requirements(('openvino-dev',)) # requires openvino-dev: https://pypi.org/project/openvino-dev/
+ import openvino.inference_engine as ie
+
+ LOGGER.info(f'\n{prefix} starting export with openvino {ie.__version__}...')
+ f = str(file).replace('.pt', f'_openvino_model{os.sep}')
+
+ cmd = f"mo --input_model {file.with_suffix('.onnx')} --output_dir {f} --data_type {'FP16' if half else 'FP32'}"
+ subprocess.check_output(cmd.split()) # export
+ with open(Path(f) / file.with_suffix('.yaml').name, 'w') as g:
+ yaml.dump({'stride': int(max(model.stride)), 'names': model.names}, g) # add metadata.yaml
+ return f, None
+
+
+@try_export
+def export_coreml(model, im, file, int8, half, prefix=colorstr('CoreML:')):
+ # YOLOv5 CoreML export
+ check_requirements(('coremltools',))
+ import coremltools as ct
+
+ LOGGER.info(f'\n{prefix} starting export with coremltools {ct.__version__}...')
+ f = file.with_suffix('.mlmodel')
+
+ ts = torch.jit.trace(model, im, strict=False) # TorchScript model
+ ct_model = ct.convert(ts, inputs=[ct.ImageType('image', shape=im.shape, scale=1 / 255, bias=[0, 0, 0])])
+ bits, mode = (8, 'kmeans_lut') if int8 else (16, 'linear') if half else (32, None)
+ if bits < 32:
+ if platform.system() == 'Darwin': # quantization only supported on macOS
+ with warnings.catch_warnings():
+ warnings.filterwarnings("ignore", category=DeprecationWarning) # suppress numpy==1.20 float warning
+ ct_model = ct.models.neural_network.quantization_utils.quantize_weights(ct_model, bits, mode)
+ else:
+ print(f'{prefix} quantization only supported on macOS, skipping...')
+ ct_model.save(f)
+ return f, ct_model
+
+
+@try_export
+def export_engine(model, im, file, half, dynamic, simplify, workspace=4, verbose=False, prefix=colorstr('TensorRT:')):
+ # YOLOv5 TensorRT export https://developer.nvidia.com/tensorrt
+ assert im.device.type != 'cpu', 'export running on CPU but must be on GPU, i.e. `python export.py --device 0`'
+ try:
+ import tensorrt as trt
+ except Exception:
+ if platform.system() == 'Linux':
+ check_requirements(('nvidia-tensorrt',), cmds=('-U --index-url https://pypi.ngc.nvidia.com',))
+ import tensorrt as trt
+
+ if trt.__version__[0] == '7': # TensorRT 7 handling https://github.com/ultralytics/yolov5/issues/6012
+ grid = model.model[-1].anchor_grid
+ model.model[-1].anchor_grid = [a[..., :1, :1, :] for a in grid]
+ export_onnx(model, im, file, 12, False, dynamic, simplify) # opset 12
+ model.model[-1].anchor_grid = grid
+ else: # TensorRT >= 8
+ check_version(trt.__version__, '8.0.0', hard=True) # require tensorrt>=8.0.0
+ export_onnx(model, im, file, 13, False, dynamic, simplify) # opset 13
+ onnx = file.with_suffix('.onnx')
+
+ LOGGER.info(f'\n{prefix} starting export with TensorRT {trt.__version__}...')
+ assert onnx.exists(), f'failed to export ONNX file: {onnx}'
+ f = file.with_suffix('.engine') # TensorRT engine file
+ logger = trt.Logger(trt.Logger.INFO)
+ if verbose:
+ logger.min_severity = trt.Logger.Severity.VERBOSE
+
+ builder = trt.Builder(logger)
+ config = builder.create_builder_config()
+ config.max_workspace_size = workspace * 1 << 30
+ # config.set_memory_pool_limit(trt.MemoryPoolType.WORKSPACE, workspace << 30) # fix TRT 8.4 deprecation notice
+
+ flag = (1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH))
+ network = builder.create_network(flag)
+ parser = trt.OnnxParser(network, logger)
+ if not parser.parse_from_file(str(onnx)):
+ raise RuntimeError(f'failed to load ONNX file: {onnx}')
+
+ inputs = [network.get_input(i) for i in range(network.num_inputs)]
+ outputs = [network.get_output(i) for i in range(network.num_outputs)]
+ LOGGER.info(f'{prefix} Network Description:')
+ for inp in inputs:
+ LOGGER.info(f'{prefix}\tinput "{inp.name}" with shape {inp.shape} and dtype {inp.dtype}')
+ for out in outputs:
+ LOGGER.info(f'{prefix}\toutput "{out.name}" with shape {out.shape} and dtype {out.dtype}')
+
+ if dynamic:
+ if im.shape[0] <= 1:
+ LOGGER.warning(f"{prefix}WARNING: --dynamic model requires maximum --batch-size argument")
+ profile = builder.create_optimization_profile()
+ for inp in inputs:
+ profile.set_shape(inp.name, (1, *im.shape[1:]), (max(1, im.shape[0] // 2), *im.shape[1:]), im.shape)
+ config.add_optimization_profile(profile)
+
+ LOGGER.info(f'{prefix} building FP{16 if builder.platform_has_fast_fp16 and half else 32} engine in {f}')
+ if builder.platform_has_fast_fp16 and half:
+ config.set_flag(trt.BuilderFlag.FP16)
+ with builder.build_engine(network, config) as engine, open(f, 'wb') as t:
+ t.write(engine.serialize())
+ return f, None
+
+
+@try_export
+def export_saved_model(model,
+ im,
+ file,
+ dynamic,
+ tf_nms=False,
+ agnostic_nms=False,
+ topk_per_class=100,
+ topk_all=100,
+ iou_thres=0.45,
+ conf_thres=0.25,
+ keras=False,
+ prefix=colorstr('TensorFlow SavedModel:')):
+ # YOLOv5 TensorFlow SavedModel export
+ import tensorflow as tf
+ from tensorflow.python.framework.convert_to_constants import convert_variables_to_constants_v2
+
+ from models.tf import TFModel
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ f = str(file).replace('.pt', '_saved_model')
+ batch_size, ch, *imgsz = list(im.shape) # BCHW
+
+ tf_model = TFModel(cfg=model.yaml, model=model, nc=model.nc, imgsz=imgsz)
+ im = tf.zeros((batch_size, *imgsz, ch)) # BHWC order for TensorFlow
+ _ = tf_model.predict(im, tf_nms, agnostic_nms, topk_per_class, topk_all, iou_thres, conf_thres)
+ inputs = tf.keras.Input(shape=(*imgsz, ch), batch_size=None if dynamic else batch_size)
+ outputs = tf_model.predict(inputs, tf_nms, agnostic_nms, topk_per_class, topk_all, iou_thres, conf_thres)
+ keras_model = tf.keras.Model(inputs=inputs, outputs=outputs)
+ keras_model.trainable = False
+ keras_model.summary()
+ if keras:
+ keras_model.save(f, save_format='tf')
+ else:
+ spec = tf.TensorSpec(keras_model.inputs[0].shape, keras_model.inputs[0].dtype)
+ m = tf.function(lambda x: keras_model(x)) # full model
+ m = m.get_concrete_function(spec)
+ frozen_func = convert_variables_to_constants_v2(m)
+ tfm = tf.Module()
+ tfm.__call__ = tf.function(lambda x: frozen_func(x)[:4] if tf_nms else frozen_func(x)[0], [spec])
+ tfm.__call__(im)
+ tf.saved_model.save(tfm,
+ f,
+ options=tf.saved_model.SaveOptions(experimental_custom_gradients=False) if check_version(
+ tf.__version__, '2.6') else tf.saved_model.SaveOptions())
+ return f, keras_model
+
+
+@try_export
+def export_pb(keras_model, file, prefix=colorstr('TensorFlow GraphDef:')):
+ # YOLOv5 TensorFlow GraphDef *.pb export https://github.com/leimao/Frozen_Graph_TensorFlow
+ import tensorflow as tf
+ from tensorflow.python.framework.convert_to_constants import convert_variables_to_constants_v2
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ f = file.with_suffix('.pb')
+
+ m = tf.function(lambda x: keras_model(x)) # full model
+ m = m.get_concrete_function(tf.TensorSpec(keras_model.inputs[0].shape, keras_model.inputs[0].dtype))
+ frozen_func = convert_variables_to_constants_v2(m)
+ frozen_func.graph.as_graph_def()
+ tf.io.write_graph(graph_or_graph_def=frozen_func.graph, logdir=str(f.parent), name=f.name, as_text=False)
+ return f, None
+
+
+@try_export
+def export_tflite(keras_model, im, file, int8, data, nms, agnostic_nms, prefix=colorstr('TensorFlow Lite:')):
+ # YOLOv5 TensorFlow Lite export
+ import tensorflow as tf
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflow {tf.__version__}...')
+ batch_size, ch, *imgsz = list(im.shape) # BCHW
+ f = str(file).replace('.pt', '-fp16.tflite')
+
+ converter = tf.lite.TFLiteConverter.from_keras_model(keras_model)
+ converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS]
+ converter.target_spec.supported_types = [tf.float16]
+ converter.optimizations = [tf.lite.Optimize.DEFAULT]
+ if int8:
+ from models.tf import representative_dataset_gen
+ dataset = LoadImages(check_dataset(check_yaml(data))['train'], img_size=imgsz, auto=False)
+ converter.representative_dataset = lambda: representative_dataset_gen(dataset, ncalib=100)
+ converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS_INT8]
+ converter.target_spec.supported_types = []
+ converter.inference_input_type = tf.uint8 # or tf.int8
+ converter.inference_output_type = tf.uint8 # or tf.int8
+ converter.experimental_new_quantizer = True
+ f = str(file).replace('.pt', '-int8.tflite')
+ if nms or agnostic_nms:
+ converter.target_spec.supported_ops.append(tf.lite.OpsSet.SELECT_TF_OPS)
+
+ tflite_model = converter.convert()
+ open(f, "wb").write(tflite_model)
+ return f, None
+
+
+@try_export
+def export_edgetpu(file, prefix=colorstr('Edge TPU:')):
+ # YOLOv5 Edge TPU export https://coral.ai/docs/edgetpu/models-intro/
+ cmd = 'edgetpu_compiler --version'
+ help_url = 'https://coral.ai/docs/edgetpu/compiler/'
+ assert platform.system() == 'Linux', f'export only supported on Linux. See {help_url}'
+ if subprocess.run(f'{cmd} >/dev/null', shell=True).returncode != 0:
+ LOGGER.info(f'\n{prefix} export requires Edge TPU compiler. Attempting install from {help_url}')
+ sudo = subprocess.run('sudo --version >/dev/null', shell=True).returncode == 0 # sudo installed on system
+ for c in (
+ 'curl https://packages.cloud.google.com/apt/doc/apt-key.gpg | sudo apt-key add -',
+ 'echo "deb https://packages.cloud.google.com/apt coral-edgetpu-stable main" | sudo tee /etc/apt/sources.list.d/coral-edgetpu.list',
+ 'sudo apt-get update', 'sudo apt-get install edgetpu-compiler'):
+ subprocess.run(c if sudo else c.replace('sudo ', ''), shell=True, check=True)
+ ver = subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1]
+
+ LOGGER.info(f'\n{prefix} starting export with Edge TPU compiler {ver}...')
+ f = str(file).replace('.pt', '-int8_edgetpu.tflite') # Edge TPU model
+ f_tfl = str(file).replace('.pt', '-int8.tflite') # TFLite model
+
+ cmd = f"edgetpu_compiler -s -d -k 10 --out_dir {file.parent} {f_tfl}"
+ subprocess.run(cmd.split(), check=True)
+ return f, None
+
+
+@try_export
+def export_tfjs(file, prefix=colorstr('TensorFlow.js:')):
+ # YOLOv5 TensorFlow.js export
+ check_requirements(('tensorflowjs',))
+ import re
+
+ import tensorflowjs as tfjs
+
+ LOGGER.info(f'\n{prefix} starting export with tensorflowjs {tfjs.__version__}...')
+ f = str(file).replace('.pt', '_web_model') # js dir
+ f_pb = file.with_suffix('.pb') # *.pb path
+ f_json = f'{f}/model.json' # *.json path
+
+ cmd = f'tensorflowjs_converter --input_format=tf_frozen_model ' \
+ f'--output_node_names=Identity,Identity_1,Identity_2,Identity_3 {f_pb} {f}'
+ subprocess.run(cmd.split())
+
+ json = Path(f_json).read_text()
+ with open(f_json, 'w') as j: # sort JSON Identity_* in ascending order
+ subst = re.sub(
+ r'{"outputs": {"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}, '
+ r'"Identity.?.?": {"name": "Identity.?.?"}}}', r'{"outputs": {"Identity": {"name": "Identity"}, '
+ r'"Identity_1": {"name": "Identity_1"}, '
+ r'"Identity_2": {"name": "Identity_2"}, '
+ r'"Identity_3": {"name": "Identity_3"}}}', json)
+ j.write(subst)
+ return f, None
+
+
+@smart_inference_mode()
+def run(
+ data=ROOT / 'data/coco128.yaml', # 'dataset.yaml path'
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=(640, 640), # image (height, width)
+ batch_size=1, # batch size
+ device='cpu', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ include=('torchscript', 'onnx'), # include formats
+ half=False, # FP16 half-precision export
+ inplace=False, # set YOLOv5 Detect() inplace=True
+ train=False, # model.train() mode
+ keras=False, # use Keras
+ optimize=False, # TorchScript: optimize for mobile
+ int8=False, # CoreML/TF INT8 quantization
+ dynamic=False, # ONNX/TF/TensorRT: dynamic axes
+ simplify=False, # ONNX: simplify model
+ opset=12, # ONNX: opset version
+ verbose=False, # TensorRT: verbose log
+ workspace=4, # TensorRT: workspace size (GB)
+ nms=False, # TF: add NMS to model
+ agnostic_nms=False, # TF: add agnostic NMS to model
+ topk_per_class=100, # TF.js NMS: topk per class to keep
+ topk_all=100, # TF.js NMS: topk for all classes to keep
+ iou_thres=0.45, # TF.js NMS: IoU threshold
+ conf_thres=0.25, # TF.js NMS: confidence threshold
+):
+ t = time.time()
+ include = [x.lower() for x in include] # to lowercase
+ fmts = tuple(export_formats()['Argument'][1:]) # --include arguments
+ flags = [x in include for x in fmts]
+ assert sum(flags) == len(include), f'ERROR: Invalid --include {include}, valid --include arguments are {fmts}'
+ jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs = flags # export booleans
+ file = Path(url2file(weights) if str(weights).startswith(('http:/', 'https:/')) else weights) # PyTorch weights
+
+ # Load PyTorch model
+ device = select_device(device)
+ if half:
+ assert device.type != 'cpu' or coreml, '--half only compatible with GPU export, i.e. use --device 0'
+ assert not dynamic, '--half not compatible with --dynamic, i.e. use either --half or --dynamic but not both'
+ model = attempt_load(weights, device=device, inplace=True, fuse=True) # load FP32 model
+
+ # Checks
+ imgsz *= 2 if len(imgsz) == 1 else 1 # expand
+ if optimize:
+ assert device.type == 'cpu', '--optimize not compatible with cuda devices, i.e. use --device cpu'
+
+ # Input
+ gs = int(max(model.stride)) # grid size (max stride)
+ imgsz = [check_img_size(x, gs) for x in imgsz] # verify img_size are gs-multiples
+ im = torch.zeros(batch_size, 3, *imgsz).to(device) # image size(1,3,320,192) BCHW iDetection
+
+ # Update model
+ model.train() if train else model.eval() # training mode = no Detect() layer grid construction
+ for k, m in model.named_modules():
+ if isinstance(m, Detect):
+ m.inplace = inplace
+ m.dynamic = dynamic
+ m.export = True
+
+ for _ in range(2):
+ y = model(im) # dry runs
+ if half and not coreml:
+ im, model = im.half(), model.half() # to FP16
+ shape = tuple((y[0] if isinstance(y, tuple) else y).shape) # model output shape
+ LOGGER.info(f"\n{colorstr('PyTorch:')} starting from {file} with output shape {shape} ({file_size(file):.1f} MB)")
+
+ # Exports
+ f = [''] * 10 # exported filenames
+ warnings.filterwarnings(action='ignore', category=torch.jit.TracerWarning) # suppress TracerWarning
+ if jit:
+ f[0], _ = export_torchscript(model, im, file, optimize)
+ if engine: # TensorRT required before ONNX
+ f[1], _ = export_engine(model, im, file, half, dynamic, simplify, workspace, verbose)
+ if onnx or xml: # OpenVINO requires ONNX
+ f[2], _ = export_onnx(model, im, file, opset, train, dynamic, simplify)
+ if xml: # OpenVINO
+ f[3], _ = export_openvino(model, file, half)
+ if coreml:
+ f[4], _ = export_coreml(model, im, file, int8, half)
+
+ # TensorFlow Exports
+ if any((saved_model, pb, tflite, edgetpu, tfjs)):
+ if int8 or edgetpu: # TFLite --int8 bug https://github.com/ultralytics/yolov5/issues/5707
+ check_requirements(('flatbuffers==1.12',)) # required before `import tensorflow`
+ assert not tflite or not tfjs, 'TFLite and TF.js models must be exported separately, please pass only one type.'
+ f[5], model = export_saved_model(model.cpu(),
+ im,
+ file,
+ dynamic,
+ tf_nms=nms or agnostic_nms or tfjs,
+ agnostic_nms=agnostic_nms or tfjs,
+ topk_per_class=topk_per_class,
+ topk_all=topk_all,
+ iou_thres=iou_thres,
+ conf_thres=conf_thres,
+ keras=keras)
+ if pb or tfjs: # pb prerequisite to tfjs
+ f[6], _ = export_pb(model, file)
+ if tflite or edgetpu:
+ f[7], _ = export_tflite(model, im, file, int8 or edgetpu, data=data, nms=nms, agnostic_nms=agnostic_nms)
+ if edgetpu:
+ f[8], _ = export_edgetpu(file)
+ if tfjs:
+ f[9], _ = export_tfjs(file)
+
+ # Finish
+ f = [str(x) for x in f if x] # filter out '' and None
+ if any(f):
+ h = '--half' if half else '' # --half FP16 inference arg
+ LOGGER.info(f'\nExport complete ({time.time() - t:.1f}s)'
+ f"\nResults saved to {colorstr('bold', file.parent.resolve())}"
+ f"\nDetect: python detect.py --weights {f[-1]} {h}"
+ f"\nValidate: python val.py --weights {f[-1]} {h}"
+ f"\nPyTorch Hub: model = torch.hub.load('ultralytics/yolov5', 'custom', '{f[-1]}')"
+ f"\nVisualize: https://netron.app")
+ return f # return list of exported files/dirs
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model.pt path(s)')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640, 640], help='image (h, w)')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--device', default='cpu', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--half', action='store_true', help='FP16 half-precision export')
+ parser.add_argument('--inplace', action='store_true', help='set YOLOv5 Detect() inplace=True')
+ parser.add_argument('--train', action='store_true', help='model.train() mode')
+ parser.add_argument('--keras', action='store_true', help='TF: use Keras')
+ parser.add_argument('--optimize', action='store_true', help='TorchScript: optimize for mobile')
+ parser.add_argument('--int8', action='store_true', help='CoreML/TF INT8 quantization')
+ parser.add_argument('--dynamic', action='store_true', help='ONNX/TF/TensorRT: dynamic axes')
+ parser.add_argument('--simplify', action='store_true', help='ONNX: simplify model')
+ parser.add_argument('--opset', type=int, default=12, help='ONNX: opset version')
+ parser.add_argument('--verbose', action='store_true', help='TensorRT: verbose log')
+ parser.add_argument('--workspace', type=int, default=4, help='TensorRT: workspace size (GB)')
+ parser.add_argument('--nms', action='store_true', help='TF: add NMS to model')
+ parser.add_argument('--agnostic-nms', action='store_true', help='TF: add agnostic NMS to model')
+ parser.add_argument('--topk-per-class', type=int, default=100, help='TF.js NMS: topk per class to keep')
+ parser.add_argument('--topk-all', type=int, default=100, help='TF.js NMS: topk for all classes to keep')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='TF.js NMS: IoU threshold')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='TF.js NMS: confidence threshold')
+ parser.add_argument('--include',
+ nargs='+',
+ default=['torchscript'],
+ help='torchscript, onnx, openvino, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ for opt.weights in (opt.weights if isinstance(opt.weights, list) else [opt.weights]):
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/seg/figure/yolov7-seg-example.png b/yolov7_seg/seg/figure/yolov7-seg-example.png
new file mode 100644
index 000000000..f2b1b8d20
Binary files /dev/null and b/yolov7_seg/seg/figure/yolov7-seg-example.png differ
diff --git a/yolov7_seg/seg/hubconf.py b/yolov7_seg/seg/hubconf.py
new file mode 100644
index 000000000..f5d1a4ebc
--- /dev/null
+++ b/yolov7_seg/seg/hubconf.py
@@ -0,0 +1,164 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+PyTorch Hub models https://pytorch.org/hub/ultralytics_yolov5
+
+Usage:
+ import torch
+ model = torch.hub.load('ultralytics/yolov5', 'yolov5s')
+ model = torch.hub.load('ultralytics/yolov5:master', 'custom', 'path/to/yolov5s.onnx') # custom model from branch
+"""
+
+import torch
+
+
+def _create(name, pretrained=True, channels=3, classes=80, autoshape=True, verbose=True, device=None):
+ """Creates or loads a YOLOv5 model
+
+ Arguments:
+ name (str): model name 'yolov5s' or path 'path/to/best.pt'
+ pretrained (bool): load pretrained weights into the model
+ channels (int): number of input channels
+ classes (int): number of model classes
+ autoshape (bool): apply YOLOv5 .autoshape() wrapper to model
+ verbose (bool): print all information to screen
+ device (str, torch.device, None): device to use for model parameters
+
+ Returns:
+ YOLOv5 model
+ """
+ from pathlib import Path
+
+ from models.common import AutoShape, DetectMultiBackend
+ from models.experimental import attempt_load
+ from models.yolo import ClassificationModel, DetectionModel
+ from utils.downloads import attempt_download
+ from utils.general import LOGGER, check_requirements, intersect_dicts, logging
+ from utils.torch_utils import select_device
+
+ if not verbose:
+ LOGGER.setLevel(logging.WARNING)
+ check_requirements(exclude=('tensorboard', 'thop', 'opencv-python'))
+ name = Path(name)
+ path = name.with_suffix('.pt') if name.suffix == '' and not name.is_dir() else name # checkpoint path
+ try:
+ device = select_device(device)
+ if pretrained and channels == 3 and classes == 80:
+ try:
+ model = DetectMultiBackend(path, device=device, fuse=autoshape) # detection model
+ if autoshape:
+ if model.pt and isinstance(model.model, ClassificationModel):
+ LOGGER.warning('WARNING: YOLOv5 v6.2 ClassificationModel is not yet AutoShape compatible. '
+ 'You must pass torch tensors in BCHW to this model, i.e. shape(1,3,224,224).')
+ else:
+ model = AutoShape(model) # for file/URI/PIL/cv2/np inputs and NMS
+ except Exception:
+ model = attempt_load(path, device=device, fuse=False) # arbitrary model
+ else:
+ cfg = list((Path(__file__).parent / 'models').rglob(f'{path.stem}.yaml'))[0] # model.yaml path
+ model = DetectionModel(cfg, channels, classes) # create model
+ if pretrained:
+ ckpt = torch.load(attempt_download(path), map_location=device) # load
+ csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
+ csd = intersect_dicts(csd, model.state_dict(), exclude=['anchors']) # intersect
+ model.load_state_dict(csd, strict=False) # load
+ if len(ckpt['model'].names) == classes:
+ model.names = ckpt['model'].names # set class names attribute
+ if not verbose:
+ LOGGER.setLevel(logging.INFO) # reset to default
+ return model.to(device)
+
+ except Exception as e:
+ help_url = 'https://github.com/ultralytics/yolov5/issues/36'
+ s = f'{e}. Cache may be out of date, try `force_reload=True` or see {help_url} for help.'
+ raise Exception(s) from e
+
+
+def custom(path='path/to/model.pt', autoshape=True, _verbose=True, device=None):
+ # YOLOv5 custom or local model
+ return _create(path, autoshape=autoshape, verbose=_verbose, device=device)
+
+
+def yolov5n(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-nano model https://github.com/ultralytics/yolov5
+ return _create('yolov5n', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5s(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-small model https://github.com/ultralytics/yolov5
+ return _create('yolov5s', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5m(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-medium model https://github.com/ultralytics/yolov5
+ return _create('yolov5m', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5l(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-large model https://github.com/ultralytics/yolov5
+ return _create('yolov5l', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5x(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-xlarge model https://github.com/ultralytics/yolov5
+ return _create('yolov5x', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5n6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-nano-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5n6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5s6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-small-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5s6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5m6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-medium-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5m6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5l6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-large-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5l6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+def yolov5x6(pretrained=True, channels=3, classes=80, autoshape=True, _verbose=True, device=None):
+ # YOLOv5-xlarge-P6 model https://github.com/ultralytics/yolov5
+ return _create('yolov5x6', pretrained, channels, classes, autoshape, _verbose, device)
+
+
+if __name__ == '__main__':
+ import argparse
+ from pathlib import Path
+
+ import numpy as np
+ from PIL import Image
+
+ from utils.general import cv2, print_args
+
+ # Argparser
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--model', type=str, default='yolov5s', help='model name')
+ opt = parser.parse_args()
+ print_args(vars(opt))
+
+ # Model
+ model = _create(name=opt.model, pretrained=True, channels=3, classes=80, autoshape=True, verbose=True)
+ # model = custom(path='path/to/model.pt') # custom
+
+ # Images
+ imgs = [
+ 'data/images/zidane.jpg', # filename
+ Path('data/images/zidane.jpg'), # Path
+ 'https://ultralytics.com/images/zidane.jpg', # URI
+ cv2.imread('data/images/bus.jpg')[:, :, ::-1], # OpenCV
+ Image.open('data/images/bus.jpg'), # PIL
+ np.zeros((320, 640, 3))] # numpy
+
+ # Inference
+ results = model(imgs, size=320) # batched inference
+
+ # Results
+ results.print()
+ results.save()
diff --git a/yolov7_seg/seg/models/__init__.py b/yolov7_seg/seg/models/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/yolov7_seg/seg/models/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/yolov7_seg/seg/models/__pycache__/__init__.cpython-310.pyc b/yolov7_seg/seg/models/__pycache__/__init__.cpython-310.pyc
new file mode 100644
index 000000000..05839cf63
Binary files /dev/null and b/yolov7_seg/seg/models/__pycache__/__init__.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/models/__pycache__/common.cpython-310.pyc b/yolov7_seg/seg/models/__pycache__/common.cpython-310.pyc
new file mode 100644
index 000000000..f36ef3203
Binary files /dev/null and b/yolov7_seg/seg/models/__pycache__/common.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/models/__pycache__/experimental.cpython-310.pyc b/yolov7_seg/seg/models/__pycache__/experimental.cpython-310.pyc
new file mode 100644
index 000000000..65daeaa3b
Binary files /dev/null and b/yolov7_seg/seg/models/__pycache__/experimental.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/models/__pycache__/yolo.cpython-310.pyc b/yolov7_seg/seg/models/__pycache__/yolo.cpython-310.pyc
new file mode 100644
index 000000000..9ec002818
Binary files /dev/null and b/yolov7_seg/seg/models/__pycache__/yolo.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/models/common.py b/yolov7_seg/seg/models/common.py
new file mode 100644
index 000000000..44c00dd8a
--- /dev/null
+++ b/yolov7_seg/seg/models/common.py
@@ -0,0 +1,885 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Common modules
+"""
+
+import json
+import math
+import platform
+import warnings
+from collections import OrderedDict, namedtuple
+from copy import copy
+from pathlib import Path
+import sys
+sys.path.insert(0,'.')
+import cv2
+import numpy as np
+import pandas as pd
+import requests
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+from PIL import Image
+from torch.cuda import amp
+
+from utils.dataloaders import exif_transpose, letterbox
+from utils.general import (LOGGER, ROOT, Profile, check_requirements, check_suffix, check_version, colorstr,
+ increment_path, make_divisible, non_max_suppression, scale_coords, xywh2xyxy, xyxy2xywh,
+ yaml_load)
+from utils.plots import Annotator, colors, save_one_box
+from utils.torch_utils import copy_attr, smart_inference_mode
+
+
+def autopad(k, p=None): # kernel, padding
+ # Pad to 'same'
+ if p is None:
+ p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
+ return p
+
+
+class ImplicitA(nn.Module):
+ def __init__(self, channel):
+ super(ImplicitA, self).__init__()
+ self.channel = channel
+ self.implicit = nn.Parameter(torch.zeros(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, std=.02)
+
+ def forward(self, x):
+ return self.implicit + x
+
+
+class ImplicitM(nn.Module):
+ def __init__(self, channel):
+ super(ImplicitM, self).__init__()
+ self.channel = channel
+ self.implicit = nn.Parameter(torch.ones(1, channel, 1, 1))
+ nn.init.normal_(self.implicit, mean=1., std=.02)
+
+ def forward(self, x):
+ return self.implicit * x
+
+
+class MP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, k=2):
+ super(MP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=k)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class SP(nn.Module):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, k=3, s=1):
+ super(SP, self).__init__()
+ self.m = nn.MaxPool2d(kernel_size=k, stride=s, padding=k // 2)
+
+ def forward(self, x):
+ return self.m(x)
+
+
+class ReOrg(nn.Module):
+ def __init__(self):
+ super(ReOrg, self).__init__()
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1)
+
+
+class Conv(nn.Module):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+
+ def forward(self, x):
+ return self.act(self.bn(self.conv(x)))
+
+ def forward_fuse(self, x):
+ return self.act(self.conv(x))
+
+
+class DWConv(Conv):
+ # Depth-wise convolution class
+ def __init__(self, c1, c2, k=1, s=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__(c1, c2, k, s, g=math.gcd(c1, c2), act=act)
+
+
+class DWConvTranspose2d(nn.ConvTranspose2d):
+ # Depth-wise transpose convolution class
+ def __init__(self, c1, c2, k=1, s=1, p1=0, p2=0): # ch_in, ch_out, kernel, stride, padding, padding_out
+ super().__init__(c1, c2, k, s, p1, p2, groups=math.gcd(c1, c2))
+
+
+class TransformerLayer(nn.Module):
+ # Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance)
+ def __init__(self, c, num_heads):
+ super().__init__()
+ self.q = nn.Linear(c, c, bias=False)
+ self.k = nn.Linear(c, c, bias=False)
+ self.v = nn.Linear(c, c, bias=False)
+ self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads)
+ self.fc1 = nn.Linear(c, c, bias=False)
+ self.fc2 = nn.Linear(c, c, bias=False)
+
+ def forward(self, x):
+ x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x
+ x = self.fc2(self.fc1(x)) + x
+ return x
+
+
+class TransformerBlock(nn.Module):
+ # Vision Transformer https://arxiv.org/abs/2010.11929
+ def __init__(self, c1, c2, num_heads, num_layers):
+ super().__init__()
+ self.conv = None
+ if c1 != c2:
+ self.conv = Conv(c1, c2)
+ self.linear = nn.Linear(c2, c2) # learnable position embedding
+ self.tr = nn.Sequential(*(TransformerLayer(c2, num_heads) for _ in range(num_layers)))
+ self.c2 = c2
+
+ def forward(self, x):
+ if self.conv is not None:
+ x = self.conv(x)
+ b, _, w, h = x.shape
+ p = x.flatten(2).permute(2, 0, 1)
+ return self.tr(p + self.linear(p)).permute(1, 2, 0).reshape(b, self.c2, w, h)
+
+
+class Bottleneck(nn.Module):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_, c2, 3, 1, g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class BottleneckCSP(nn.Module):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False)
+ self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False)
+ self.cv4 = Conv(2 * c_, c2, 1, 1)
+ self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(cv2, cv3)
+ self.act = nn.SiLU()
+ self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
+
+ def forward(self, x):
+ y1 = self.cv3(self.m(self.cv1(x)))
+ y2 = self.cv2(x)
+ return self.cv4(self.act(self.bn(torch.cat((y1, y2), 1))))
+
+
+class CrossConv(nn.Module):
+ # Cross Convolution Downsample
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False):
+ # ch_in, ch_out, kernel, stride, groups, expansion, shortcut
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, (1, k), (1, s))
+ self.cv2 = Conv(c_, c2, (k, 1), (s, 1), g=g)
+ self.add = shortcut and c1 == c2
+
+ def forward(self, x):
+ return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
+
+
+class C3(nn.Module):
+ # CSP Bottleneck with 3 convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)
+ self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
+
+ def forward(self, x):
+ return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))
+
+
+class C3x(C3):
+ # C3 module with cross-convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = nn.Sequential(*(CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)))
+
+
+class C3TR(C3):
+ # C3 module with TransformerBlock()
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = TransformerBlock(c_, c_, 4, n)
+
+
+class C3SPP(C3):
+ # C3 module with SPP()
+ def __init__(self, c1, c2, k=(5, 9, 13), n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e)
+ self.m = SPP(c_, c_, k)
+
+
+class C3Ghost(C3):
+ # C3 module with GhostBottleneck()
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
+ super().__init__(c1, c2, n, shortcut, g, e)
+ c_ = int(c2 * e) # hidden channels
+ self.m = nn.Sequential(*(GhostBottleneck(c_, c_) for _ in range(n)))
+
+
+class SPP(nn.Module):
+ # Spatial Pyramid Pooling (SPP) layer https://arxiv.org/abs/1406.4729
+ def __init__(self, c1, c2, k=(5, 9, 13)):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+
+ def forward(self, x):
+ x = self.cv1(x)
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
+ return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))
+
+
+class SPPF(nn.Module):
+ # Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
+ def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c_ * 4, c2, 1, 1)
+ self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
+
+ def forward(self, x):
+ x = self.cv1(x)
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(torch.cat((x, y1, y2, self.m(y2)), 1))
+
+
+class SPPCSPC(nn.Module):
+ # CSP SPP https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
+ super(SPPCSPC, self).__init__()
+ c_ = int(2 * c2 * e) # hidden channels
+ self.cv1 = Conv(c1, c_, 1, 1)
+ self.cv2 = Conv(c1, c_, 1, 1)
+ self.cv3 = Conv(c_, c_, 3, 1)
+ self.cv4 = Conv(c_, c_, 1, 1)
+ self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
+ self.cv5 = Conv(4 * c_, c_, 1, 1)
+ self.cv6 = Conv(c_, c_, 3, 1)
+ self.cv7 = Conv(2 * c_, c2, 1, 1)
+
+ def forward(self, x):
+ x1 = self.cv4(self.cv3(self.cv1(x)))
+ y1 = self.cv6(self.cv5(torch.cat([x1] + [m(x1) for m in self.m], 1)))
+ y2 = self.cv2(x)
+ return self.cv7(torch.cat((y1, y2), dim=1))
+
+
+class Focus(nn.Module):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
+ # self.contract = Contract(gain=2)
+
+ def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
+ return self.conv(torch.cat((x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]), 1))
+ # return self.conv(self.contract(x))
+
+
+class GhostConv(nn.Module):
+ # Ghost Convolution https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
+ super().__init__()
+ c_ = c2 // 2 # hidden channels
+ self.cv1 = Conv(c1, c_, k, s, None, g, act)
+ self.cv2 = Conv(c_, c_, 5, 1, None, c_, act)
+
+ def forward(self, x):
+ y = self.cv1(x)
+ return torch.cat((y, self.cv2(y)), 1)
+
+
+class GhostBottleneck(nn.Module):
+ # Ghost Bottleneck https://github.com/huawei-noah/ghostnet
+ def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride
+ super().__init__()
+ c_ = c2 // 2
+ self.conv = nn.Sequential(
+ GhostConv(c1, c_, 1, 1), # pw
+ DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw
+ GhostConv(c_, c2, 1, 1, act=False)) # pw-linear
+ self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False), Conv(c1, c2, 1, 1,
+ act=False)) if s == 2 else nn.Identity()
+
+ def forward(self, x):
+ return self.conv(x) + self.shortcut(x)
+
+
+class Contract(nn.Module):
+ # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ b, c, h, w = x.size() # assert (h / s == 0) and (W / s == 0), 'Indivisible gain'
+ s = self.gain
+ x = x.view(b, c, h // s, s, w // s, s) # x(1,64,40,2,40,2)
+ x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
+ return x.view(b, c * s * s, h // s, w // s) # x(1,256,40,40)
+
+
+class Expand(nn.Module):
+ # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ b, c, h, w = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
+ s = self.gain
+ x = x.view(b, s, s, c // s ** 2, h, w) # x(1,2,2,16,80,80)
+ x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
+ return x.view(b, c // s ** 2, h * s, w * s) # x(1,16,160,160)
+
+
+class Concat(nn.Module):
+ # Concatenate a list of tensors along dimension
+ def __init__(self, dimension=1):
+ super().__init__()
+ self.d = dimension
+
+ def forward(self, x):
+ return torch.cat(x, self.d)
+
+
+class DetectMultiBackend(nn.Module):
+ # YOLOv5 MultiBackend class for python inference on various backends
+ def __init__(self, weights='yolov5s.pt', device=torch.device('cpu'), dnn=False, data=None, fp16=False, fuse=True):
+ # Usage:
+ # PyTorch: weights = *.pt
+ # TorchScript: *.torchscript
+ # ONNX Runtime: *.onnx
+ # ONNX OpenCV DNN: *.onnx with --dnn
+ # OpenVINO: *.xml
+ # CoreML: *.mlmodel
+ # TensorRT: *.engine
+ # TensorFlow SavedModel: *_saved_model
+ # TensorFlow GraphDef: *.pb
+ # TensorFlow Lite: *.tflite
+ # TensorFlow Edge TPU: *_edgetpu.tflite
+ from models.experimental import attempt_download, attempt_load # scoped to avoid circular import
+
+ super().__init__()
+ w = str(weights[0] if isinstance(weights, list) else weights)
+ pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs = self._model_type(w) # get backend
+ w = attempt_download(w) # download if not local
+ fp16 &= pt or jit or onnx or engine # FP16
+ stride = 32 # default stride
+
+ if pt: # PyTorch
+ model = attempt_load(weights if isinstance(weights, list) else w, device=device, inplace=True, fuse=fuse)
+ stride = max(int(model.stride.max()), 32) # model stride
+ names = model.module.names if hasattr(model, 'module') else model.names # get class names
+ model.half() if fp16 else model.float()
+ self.model = model # explicitly assign for to(), cpu(), cuda(), half()
+ segmentation_model = type(model.model[-1]).__name__ in ['Segment', 'ISegment', 'IRSegment']
+ elif jit: # TorchScript
+ LOGGER.info(f'Loading {w} for TorchScript inference...')
+ extra_files = {'config.txt': ''} # model metadata
+ model = torch.jit.load(w, _extra_files=extra_files)
+ model.half() if fp16 else model.float()
+ if extra_files['config.txt']: # load metadata dict
+ d = json.loads(extra_files['config.txt'],
+ object_hook=lambda d: {int(k) if k.isdigit() else k: v
+ for k, v in d.items()})
+ stride, names = int(d['stride']), d['names']
+ elif dnn: # ONNX OpenCV DNN
+ LOGGER.info(f'Loading {w} for ONNX OpenCV DNN inference...')
+ check_requirements(('opencv-python>=4.5.4',))
+ net = cv2.dnn.readNetFromONNX(w)
+ elif onnx: # ONNX Runtime
+ LOGGER.info(f'Loading {w} for ONNX Runtime inference...')
+ cuda = torch.cuda.is_available() and device.type != 'cpu'
+ check_requirements(('onnx', 'onnxruntime-gpu' if cuda else 'onnxruntime'))
+ import onnxruntime
+ providers = ['CUDAExecutionProvider', 'CPUExecutionProvider'] if cuda else ['CPUExecutionProvider']
+ session = onnxruntime.InferenceSession(w, providers=providers)
+ meta = session.get_modelmeta().custom_metadata_map # metadata
+ if 'stride' in meta:
+ stride, names = int(meta['stride']), eval(meta['names'])
+ elif xml: # OpenVINO
+ LOGGER.info(f'Loading {w} for OpenVINO inference...')
+ check_requirements(('openvino',)) # requires openvino-dev: https://pypi.org/project/openvino-dev/
+ from openvino.runtime import Core, Layout, get_batch
+ ie = Core()
+ if not Path(w).is_file(): # if not *.xml
+ w = next(Path(w).glob('*.xml')) # get *.xml file from *_openvino_model dir
+ network = ie.read_model(model=w, weights=Path(w).with_suffix('.bin'))
+ if network.get_parameters()[0].get_layout().empty:
+ network.get_parameters()[0].set_layout(Layout("NCHW"))
+ batch_dim = get_batch(network)
+ if batch_dim.is_static:
+ batch_size = batch_dim.get_length()
+ executable_network = ie.compile_model(network, device_name="CPU") # device_name="MYRIAD" for Intel NCS2
+ output_layer = next(iter(executable_network.outputs))
+ meta = Path(w).with_suffix('.yaml')
+ if meta.exists():
+ stride, names = self._load_metadata(meta) # load metadata
+ elif engine: # TensorRT
+ LOGGER.info(f'Loading {w} for TensorRT inference...')
+ import tensorrt as trt # https://developer.nvidia.com/nvidia-tensorrt-download
+ check_version(trt.__version__, '7.0.0', hard=True) # require tensorrt>=7.0.0
+ if device.type == 'cpu':
+ device = torch.device('cuda:0')
+ Binding = namedtuple('Binding', ('name', 'dtype', 'shape', 'data', 'ptr'))
+ logger = trt.Logger(trt.Logger.INFO)
+ with open(w, 'rb') as f, trt.Runtime(logger) as runtime:
+ model = runtime.deserialize_cuda_engine(f.read())
+ context = model.create_execution_context()
+ bindings = OrderedDict()
+ fp16 = False # default updated below
+ dynamic = False
+ for index in range(model.num_bindings):
+ name = model.get_binding_name(index)
+ dtype = trt.nptype(model.get_binding_dtype(index))
+ if model.binding_is_input(index):
+ if -1 in tuple(model.get_binding_shape(index)): # dynamic
+ dynamic = True
+ context.set_binding_shape(index, tuple(model.get_profile_shape(0, index)[2]))
+ if dtype == np.float16:
+ fp16 = True
+ shape = tuple(context.get_binding_shape(index))
+ im = torch.from_numpy(np.empty(shape, dtype=dtype)).to(device)
+ bindings[name] = Binding(name, dtype, shape, im, int(im.data_ptr()))
+ binding_addrs = OrderedDict((n, d.ptr) for n, d in bindings.items())
+ batch_size = bindings['images'].shape[0] # if dynamic, this is instead max batch size
+ elif coreml: # CoreML
+ LOGGER.info(f'Loading {w} for CoreML inference...')
+ import coremltools as ct
+ model = ct.models.MLModel(w)
+ else: # TensorFlow (SavedModel, GraphDef, Lite, Edge TPU)
+ if saved_model: # SavedModel
+ LOGGER.info(f'Loading {w} for TensorFlow SavedModel inference...')
+ import tensorflow as tf
+ keras = False # assume TF1 saved_model
+ model = tf.keras.models.load_model(w) if keras else tf.saved_model.load(w)
+ elif pb: # GraphDef https://www.tensorflow.org/guide/migrate#a_graphpb_or_graphpbtxt
+ LOGGER.info(f'Loading {w} for TensorFlow GraphDef inference...')
+ import tensorflow as tf
+
+ def wrap_frozen_graph(gd, inputs, outputs):
+ x = tf.compat.v1.wrap_function(lambda: tf.compat.v1.import_graph_def(gd, name=""), []) # wrapped
+ ge = x.graph.as_graph_element
+ return x.prune(tf.nest.map_structure(ge, inputs), tf.nest.map_structure(ge, outputs))
+
+ gd = tf.Graph().as_graph_def() # graph_def
+ with open(w, 'rb') as f:
+ gd.ParseFromString(f.read())
+ frozen_func = wrap_frozen_graph(gd, inputs="x:0", outputs="Identity:0")
+ elif tflite or edgetpu: # https://www.tensorflow.org/lite/guide/python#install_tensorflow_lite_for_python
+ try: # https://coral.ai/docs/edgetpu/tflite-python/#update-existing-tf-lite-code-for-the-edge-tpu
+ from tflite_runtime.interpreter import Interpreter, load_delegate
+ except ImportError:
+ import tensorflow as tf
+ Interpreter, load_delegate = tf.lite.Interpreter, tf.lite.experimental.load_delegate,
+ if edgetpu: # Edge TPU https://coral.ai/software/#edgetpu-runtime
+ LOGGER.info(f'Loading {w} for TensorFlow Lite Edge TPU inference...')
+ delegate = {
+ 'Linux': 'libedgetpu.so.1',
+ 'Darwin': 'libedgetpu.1.dylib',
+ 'Windows': 'edgetpu.dll'}[platform.system()]
+ interpreter = Interpreter(model_path=w, experimental_delegates=[load_delegate(delegate)])
+ else: # Lite
+ LOGGER.info(f'Loading {w} for TensorFlow Lite inference...')
+ interpreter = Interpreter(model_path=w) # load TFLite model
+ interpreter.allocate_tensors() # allocate
+ input_details = interpreter.get_input_details() # inputs
+ output_details = interpreter.get_output_details() # outputs
+ elif tfjs:
+ raise NotImplementedError('ERROR: YOLOv5 TF.js inference is not supported')
+ else:
+ raise NotImplementedError(f'ERROR: {w} is not a supported format')
+
+ # class names
+ if 'names' not in locals():
+ names = yaml_load(data)['names'] if data else {i: f'class{i}' for i in range(999)}
+ if names[0] == 'n01440764' and len(names) == 1000: # ImageNet
+ names = yaml_load(ROOT / 'data/ImageNet.yaml')['names'] # human-readable names
+
+ self.__dict__.update(locals()) # assign all variables to self
+
+ def forward(self, im, augment=False, visualize=False, val=False):
+ # YOLOv5 MultiBackend inference
+ b, ch, h, w = im.shape # batch, channel, height, width
+ if self.fp16 and im.dtype != torch.float16:
+ im = im.half() # to FP16
+
+ if self.pt: # PyTorch
+ y = self.model(im, augment=augment, visualize=visualize) if augment or visualize else self.model(im)
+ if isinstance(y, tuple) and not self.segmentation_model:
+ y = y[0]
+ elif self.jit: # TorchScript
+ y = self.model(im)[0]
+ elif self.dnn: # ONNX OpenCV DNN
+ im = im.cpu().numpy() # torch to numpy
+ self.net.setInput(im)
+ y = self.net.forward()
+ elif self.onnx: # ONNX Runtime
+ im = im.cpu().numpy() # torch to numpy
+ y = self.session.run([self.session.get_outputs()[0].name], {self.session.get_inputs()[0].name: im})[0]
+ elif self.xml: # OpenVINO
+ im = im.cpu().numpy() # FP32
+ y = self.executable_network([im])[self.output_layer]
+ elif self.engine: # TensorRT
+ if self.dynamic and im.shape != self.bindings['images'].shape:
+ i_in, i_out = (self.model.get_binding_index(x) for x in ('images', 'output'))
+ self.context.set_binding_shape(i_in, im.shape) # reshape if dynamic
+ self.bindings['images'] = self.bindings['images']._replace(shape=im.shape)
+ self.bindings['output'].data.resize_(tuple(self.context.get_binding_shape(i_out)))
+ s = self.bindings['images'].shape
+ assert im.shape == s, f"input size {im.shape} {'>' if self.dynamic else 'not equal to'} max model size {s}"
+ self.binding_addrs['images'] = int(im.data_ptr())
+ self.context.execute_v2(list(self.binding_addrs.values()))
+ y = self.bindings['output'].data
+ elif self.coreml: # CoreML
+ im = im.permute(0, 2, 3, 1).cpu().numpy() # torch BCHW to numpy BHWC shape(1,320,192,3)
+ im = Image.fromarray((im[0] * 255).astype('uint8'))
+ # im = im.resize((192, 320), Image.ANTIALIAS)
+ y = self.model.predict({'image': im}) # coordinates are xywh normalized
+ if 'confidence' in y:
+ box = xywh2xyxy(y['coordinates'] * [[w, h, w, h]]) # xyxy pixels
+ conf, cls = y['confidence'].max(1), y['confidence'].argmax(1).astype(np.float)
+ y = np.concatenate((box, conf.reshape(-1, 1), cls.reshape(-1, 1)), 1)
+ else:
+ k = 'var_' + str(sorted(int(k.replace('var_', '')) for k in y)[-1]) # output key
+ y = y[k] # output
+ else: # TensorFlow (SavedModel, GraphDef, Lite, Edge TPU)
+ im = im.permute(0, 2, 3, 1).cpu().numpy() # torch BCHW to numpy BHWC shape(1,320,192,3)
+ if self.saved_model: # SavedModel
+ y = (self.model(im, training=False) if self.keras else self.model(im)).numpy()
+ elif self.pb: # GraphDef
+ y = self.frozen_func(x=self.tf.constant(im)).numpy()
+ else: # Lite or Edge TPU
+ input, output = self.input_details[0], self.output_details[0]
+ int8 = input['dtype'] == np.uint8 # is TFLite quantized uint8 model
+ if int8:
+ scale, zero_point = input['quantization']
+ im = (im / scale + zero_point).astype(np.uint8) # de-scale
+ self.interpreter.set_tensor(input['index'], im)
+ self.interpreter.invoke()
+ y = self.interpreter.get_tensor(output['index'])
+ if int8:
+ scale, zero_point = output['quantization']
+ y = (y.astype(np.float32) - zero_point) * scale # re-scale
+ y[..., :4] *= [w, h, w, h] # xywh normalized to pixels
+
+ if isinstance(y, np.ndarray):
+ y = torch.tensor(y, device=self.device)
+ return (y, []) if val else y
+
+ def warmup(self, imgsz=(1, 3, 640, 640)):
+ # Warmup model by running inference once
+ warmup_types = self.pt, self.jit, self.onnx, self.engine, self.saved_model, self.pb
+ if any(warmup_types) and self.device.type != 'cpu':
+ im = torch.empty(*imgsz, dtype=torch.half if self.fp16 else torch.float, device=self.device) # input
+ for _ in range(2 if self.jit else 1): #
+ self.forward(im) # warmup
+
+ @staticmethod
+ def _model_type(p='path/to/model.pt'):
+ # Return model type from model path, i.e. path='path/to/model.onnx' -> type=onnx
+ from export import export_formats
+ suffixes = list(export_formats().Suffix) + ['.xml'] # export suffixes
+ check_suffix(p, suffixes) # checks
+ p = Path(p).name # eliminate trailing separators
+ pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs, xml2 = (s in p for s in suffixes)
+ xml |= xml2 # *_openvino_model or *.xml
+ tflite &= not edgetpu # *.tflite
+ return pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs
+
+ @staticmethod
+ def _load_metadata(f='path/to/meta.yaml'):
+ # Load metadata from meta.yaml if it exists
+ d = yaml_load(f)
+ return d['stride'], d['names'] # assign stride, names
+
+
+class AutoShape(nn.Module):
+ # YOLOv5 input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS
+ conf = 0.25 # NMS confidence threshold
+ iou = 0.45 # NMS IoU threshold
+ agnostic = False # NMS class-agnostic
+ multi_label = False # NMS multiple labels per box
+ classes = None # (optional list) filter by class, i.e. = [0, 15, 16] for COCO persons, cats and dogs
+ max_det = 1000 # maximum number of detections per image
+ amp = False # Automatic Mixed Precision (AMP) inference
+
+ def __init__(self, model, verbose=True):
+ super().__init__()
+ if verbose:
+ LOGGER.info('Adding AutoShape... ')
+ copy_attr(self, model, include=('yaml', 'nc', 'hyp', 'names', 'stride', 'abc'), exclude=()) # copy attributes
+ self.dmb = isinstance(model, DetectMultiBackend) # DetectMultiBackend() instance
+ self.pt = not self.dmb or model.pt # PyTorch model
+ self.model = model.eval()
+ if self.pt:
+ m = self.model.model.model[-1] if self.dmb else self.model.model[-1] # Detect()
+ m.inplace = False # Detect.inplace=False for safe multithread inference
+
+ def _apply(self, fn):
+ # Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers
+ self = super()._apply(fn)
+ if self.pt:
+ m = self.model.model.model[-1] if self.dmb else self.model.model[-1] # Detect()
+ m.stride = fn(m.stride)
+ m.grid = list(map(fn, m.grid))
+ if isinstance(m.anchor_grid, list):
+ m.anchor_grid = list(map(fn, m.anchor_grid))
+ return self
+
+ @smart_inference_mode()
+ def forward(self, ims, size=640, augment=False, profile=False):
+ # Inference from various sources. For size(height=640, width=1280), RGB images example inputs are:
+ # file: ims = 'data/images/zidane.jpg' # str or PosixPath
+ # URI: = 'https://ultralytics.com/images/zidane.jpg'
+ # OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3)
+ # PIL: = Image.open('image.jpg') or ImageGrab.grab() # HWC x(640,1280,3)
+ # numpy: = np.zeros((640,1280,3)) # HWC
+ # torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values)
+ # multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images
+
+ dt = (Profile(), Profile(), Profile())
+ with dt[0]:
+ if isinstance(size, int): # expand
+ size = (size, size)
+ p = next(self.model.parameters()) if self.pt else torch.empty(1, device=self.model.device) # param
+ autocast = self.amp and (p.device.type != 'cpu') # Automatic Mixed Precision (AMP) inference
+ if isinstance(ims, torch.Tensor): # torch
+ with amp.autocast(autocast):
+ return self.model(ims.to(p.device).type_as(p), augment, profile) # inference
+
+ # Pre-process
+ n, ims = (len(ims), list(ims)) if isinstance(ims, (list, tuple)) else (1, [ims]) # number, list of images
+ shape0, shape1, files = [], [], [] # image and inference shapes, filenames
+ for i, im in enumerate(ims):
+ f = f'image{i}' # filename
+ if isinstance(im, (str, Path)): # filename or uri
+ im, f = Image.open(requests.get(im, stream=True).raw if str(im).startswith('http') else im), im
+ im = np.asarray(exif_transpose(im))
+ elif isinstance(im, Image.Image): # PIL Image
+ im, f = np.asarray(exif_transpose(im)), getattr(im, 'filename', f) or f
+ files.append(Path(f).with_suffix('.jpg').name)
+ if im.shape[0] < 5: # image in CHW
+ im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1)
+ im = im[..., :3] if im.ndim == 3 else cv2.cvtColor(im, cv2.COLOR_GRAY2BGR) # enforce 3ch input
+ s = im.shape[:2] # HWC
+ shape0.append(s) # image shape
+ g = max(size) / max(s) # gain
+ shape1.append([y * g for y in s])
+ ims[i] = im if im.data.contiguous else np.ascontiguousarray(im) # update
+ shape1 = [make_divisible(x, self.stride) for x in np.array(shape1).max(0)] if self.pt else size # inf shape
+ x = [letterbox(im, shape1, auto=False)[0] for im in ims] # pad
+ x = np.ascontiguousarray(np.array(x).transpose((0, 3, 1, 2))) # stack and BHWC to BCHW
+ x = torch.from_numpy(x).to(p.device).type_as(p) / 255 # uint8 to fp16/32
+
+ with amp.autocast(autocast):
+ # Inference
+ with dt[1]:
+ y = self.model(x, augment, profile) # forward
+
+ # Post-process
+ with dt[2]:
+ y = non_max_suppression(y if self.dmb else y[0],
+ self.conf,
+ self.iou,
+ self.classes,
+ self.agnostic,
+ self.multi_label,
+ max_det=self.max_det) # NMS
+ for i in range(n):
+ scale_coords(shape1, y[i][:, :4], shape0[i])
+
+ return Detections(ims, y, files, dt, self.names, x.shape)
+
+
+class Detections:
+ # YOLOv5 detections class for inference results
+ def __init__(self, ims, pred, files, times=(0, 0, 0), names=None, shape=None):
+ super().__init__()
+ d = pred[0].device # device
+ gn = [torch.tensor([*(im.shape[i] for i in [1, 0, 1, 0]), 1, 1], device=d) for im in ims] # normalizations
+ self.ims = ims # list of images as numpy arrays
+ self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls)
+ self.names = names # class names
+ self.files = files # image filenames
+ self.times = times # profiling times
+ self.xyxy = pred # xyxy pixels
+ self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels
+ self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized
+ self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized
+ self.n = len(self.pred) # number of images (batch size)
+ self.t = tuple(x.t / self.n * 1E3 for x in times) # timestamps (ms)
+ self.s = shape # inference BCHW shape
+
+ def display(self, pprint=False, show=False, save=False, crop=False, render=False, labels=True, save_dir=Path('')):
+ crops = []
+ for i, (im, pred) in enumerate(zip(self.ims, self.pred)):
+ s = f'image {i + 1}/{len(self.pred)}: {im.shape[0]}x{im.shape[1]} ' # string
+ if pred.shape[0]:
+ for c in pred[:, -1].unique():
+ n = (pred[:, -1] == c).sum() # detections per class
+ s += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string
+ if show or save or render or crop:
+ annotator = Annotator(im, example=str(self.names))
+ for *box, conf, cls in reversed(pred): # xyxy, confidence, class
+ label = f'{self.names[int(cls)]} {conf:.2f}'
+ if crop:
+ file = save_dir / 'crops' / self.names[int(cls)] / self.files[i] if save else None
+ crops.append({
+ 'box': box,
+ 'conf': conf,
+ 'cls': cls,
+ 'label': label,
+ 'im': save_one_box(box, im, file=file, save=save)})
+ else: # all others
+ annotator.box_label(box, label if labels else '', color=colors(cls))
+ im = annotator.im
+ else:
+ s += '(no detections)'
+
+ im = Image.fromarray(im.astype(np.uint8)) if isinstance(im, np.ndarray) else im # from np
+ if pprint:
+ print(s.rstrip(', '))
+ if show:
+ im.show(self.files[i]) # show
+ if save:
+ f = self.files[i]
+ im.save(save_dir / f) # save
+ if i == self.n - 1:
+ LOGGER.info(f"Saved {self.n} image{'s' * (self.n > 1)} to {colorstr('bold', save_dir)}")
+ if render:
+ self.ims[i] = np.asarray(im)
+ if crop:
+ if save:
+ LOGGER.info(f'Saved results to {save_dir}\n')
+ return crops
+
+ def print(self):
+ self.display(pprint=True) # print results
+ print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {tuple(self.s)}' % self.t)
+
+ def show(self, labels=True):
+ self.display(show=True, labels=labels) # show results
+
+ def save(self, labels=True, save_dir='runs/detect/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) # increment save_dir
+ self.display(save=True, labels=labels, save_dir=save_dir) # save results
+
+ def crop(self, save=True, save_dir='runs/detect/exp'):
+ save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) if save else None
+ return self.display(crop=True, save=save, save_dir=save_dir) # crop results
+
+ def render(self, labels=True):
+ self.display(render=True, labels=labels) # render results
+ return self.ims
+
+ def pandas(self):
+ # return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0])
+ new = copy(self) # return copy
+ ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns
+ cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns
+ for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]):
+ a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update
+ setattr(new, k, [pd.DataFrame(x, columns=c) for x in a])
+ return new
+
+ def tolist(self):
+ # return a list of Detections objects, i.e. 'for result in results.tolist():'
+ r = range(self.n) # iterable
+ x = [Detections([self.ims[i]], [self.pred[i]], [self.files[i]], self.times, self.names, self.s) for i in r]
+ # for d in x:
+ # for k in ['ims', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']:
+ # setattr(d, k, getattr(d, k)[0]) # pop out of list
+ return x
+
+ def __len__(self):
+ return self.n # override len(results)
+
+ def __str__(self):
+ self.print() # override print(results)
+ return ''
+
+
+class Proto(nn.Module):
+ # YOLOv5 mask Proto module for segmentation models
+ def __init__(self, c1, c_=256, c2=32): # ch_in, number of protos, number of masks
+ super().__init__()
+ self.cv1 = Conv(c1, c_, k=3)
+ self.upsample = nn.Upsample(scale_factor=2, mode='nearest')
+ self.cv2 = Conv(c_, c_, k=3)
+ self.cv3 = Conv(c_, c2)
+
+ def forward(self, x):
+ return self.cv3(self.cv2(self.upsample(self.cv1(x))))
+
+
+class Refine(nn.Module):
+
+ def __init__(self, ch, c_=256, c2=32, k=3): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.refine = nn.ModuleList()
+ for c in ch:
+ self.refine.append(Conv(c, c_, k))
+ self.upsample = nn.Upsample(scale_factor=2, mode='nearest')
+ self.cv2 = Conv(c_, c_, k)
+ self.cv3 = Conv(c_, c2)
+
+ def forward(self, x):
+ for i, f in enumerate(x):
+ if i == 0:
+ r = self.refine[i](f)
+ else:
+ r_p = self.refine[i](f)
+ r_p = F.interpolate(r_p, r.size()[2:], mode="nearest")
+ r = r + r_p
+ return self.cv3(self.cv2(self.upsample(r)))
+
+
+class Classify(nn.Module):
+ # YOLOv5 classification head, i.e. x(b,c1,20,20) to x(b,c2)
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ c_ = 1280 # efficientnet_b0 size
+ self.conv = Conv(c1, c_, k, s, autopad(k, p), g)
+ self.pool = nn.AdaptiveAvgPool2d(1) # to x(b,c_,1,1)
+ self.drop = nn.Dropout(p=0.0, inplace=True)
+ self.linear = nn.Linear(c_, c2) # to x(b,c2)
+
+ def forward(self, x):
+ if isinstance(x, list):
+ x = torch.cat(x, 1)
+ return self.linear(self.drop(self.pool(self.conv(x)).flatten(1)))
diff --git a/yolov7_seg/seg/models/experimental.py b/yolov7_seg/seg/models/experimental.py
new file mode 100644
index 000000000..a5b761f58
--- /dev/null
+++ b/yolov7_seg/seg/models/experimental.py
@@ -0,0 +1,111 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Experimental modules
+"""
+import math
+
+import numpy as np
+import torch
+import torch.nn as nn
+
+from utils.downloads import attempt_download
+
+
+class Sum(nn.Module):
+ # Weighted sum of 2 or more layers https://arxiv.org/abs/1911.09070
+ def __init__(self, n, weight=False): # n: number of inputs
+ super().__init__()
+ self.weight = weight # apply weights boolean
+ self.iter = range(n - 1) # iter object
+ if weight:
+ self.w = nn.Parameter(-torch.arange(1.0, n) / 2, requires_grad=True) # layer weights
+
+ def forward(self, x):
+ y = x[0] # no weight
+ if self.weight:
+ w = torch.sigmoid(self.w) * 2
+ for i in self.iter:
+ y = y + x[i + 1] * w[i]
+ else:
+ for i in self.iter:
+ y = y + x[i + 1]
+ return y
+
+
+class MixConv2d(nn.Module):
+ # Mixed Depth-wise Conv https://arxiv.org/abs/1907.09595
+ def __init__(self, c1, c2, k=(1, 3), s=1, equal_ch=True): # ch_in, ch_out, kernel, stride, ch_strategy
+ super().__init__()
+ n = len(k) # number of convolutions
+ if equal_ch: # equal c_ per group
+ i = torch.linspace(0, n - 1E-6, c2).floor() # c2 indices
+ c_ = [(i == g).sum() for g in range(n)] # intermediate channels
+ else: # equal weight.numel() per group
+ b = [c2] + [0] * n
+ a = np.eye(n + 1, n, k=-1)
+ a -= np.roll(a, 1, axis=1)
+ a *= np.array(k) ** 2
+ a[0] = 1
+ c_ = np.linalg.lstsq(a, b, rcond=None)[0].round() # solve for equal weight indices, ax = b
+
+ self.m = nn.ModuleList([
+ nn.Conv2d(c1, int(c_), k, s, k // 2, groups=math.gcd(c1, int(c_)), bias=False) for k, c_ in zip(k, c_)])
+ self.bn = nn.BatchNorm2d(c2)
+ self.act = nn.SiLU()
+
+ def forward(self, x):
+ return self.act(self.bn(torch.cat([m(x) for m in self.m], 1)))
+
+
+class Ensemble(nn.ModuleList):
+ # Ensemble of models
+ def __init__(self):
+ super().__init__()
+
+ def forward(self, x, augment=False, profile=False, visualize=False):
+ y = [module(x, augment, profile, visualize)[0] for module in self]
+ # y = torch.stack(y).max(0)[0] # max ensemble
+ # y = torch.stack(y).mean(0) # mean ensemble
+ y = torch.cat(y, 1) # nms ensemble
+ return y, None # inference, train output
+
+
+def attempt_load(weights, device=None, inplace=True, fuse=True):
+ # Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a
+ from models.yolo import Detect, Model
+
+ model = Ensemble()
+ for w in weights if isinstance(weights, list) else [weights]:
+ ckpt = torch.load(attempt_download(w), map_location='cpu') # load
+ ckpt = (ckpt.get('ema') or ckpt['model']).to(device).float() # FP32 model
+
+ # Model compatibility updates
+ if not hasattr(ckpt, 'stride'):
+ ckpt.stride = torch.tensor([32.])
+ if hasattr(ckpt, 'names') and isinstance(ckpt.names, (list, tuple)):
+ ckpt.names = dict(enumerate(ckpt.names)) # convert to dict
+
+ model.append(ckpt.fuse().eval() if fuse and hasattr(ckpt, 'fuse') else ckpt.eval()) # model in eval mode
+
+ # Module compatibility updates
+ for m in model.modules():
+ t = type(m)
+ if t in (nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU, Detect, Model):
+ m.inplace = inplace # torch 1.7.0 compatibility
+ if t is Detect and not isinstance(m.anchor_grid, list):
+ delattr(m, 'anchor_grid')
+ setattr(m, 'anchor_grid', [torch.zeros(1)] * m.nl)
+ elif t is nn.Upsample and not hasattr(m, 'recompute_scale_factor'):
+ m.recompute_scale_factor = None # torch 1.11.0 compatibility
+
+ # Return model
+ if len(model) == 1:
+ return model[-1]
+
+ # Return detection ensemble
+ print(f'Ensemble created with {weights}\n')
+ for k in 'names', 'nc', 'yaml':
+ setattr(model, k, getattr(model[0], k))
+ model.stride = model[torch.argmax(torch.tensor([m.stride.max() for m in model])).int()].stride # max stride
+ assert all(model[0].nc == m.nc for m in model), f'Models have different class counts: {[m.nc for m in model]}'
+ return model
diff --git a/yolov7_seg/seg/models/hub/yolov3-spp.yaml b/yolov7_seg/seg/models/hub/yolov3-spp.yaml
new file mode 100644
index 000000000..299d76669
--- /dev/null
+++ b/yolov7_seg/seg/models/hub/yolov3-spp.yaml
@@ -0,0 +1,51 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,13, 16,30, 33,23] # P3/8
+ - [30,61, 62,45, 59,119] # P4/16
+ - [116,90, 156,198, 373,326] # P5/32
+
+# darknet53 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Bottleneck, [64]],
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 2, Bottleneck, [128]],
+ [-1, 1, Conv, [256, 3, 2]], # 5-P3/8
+ [-1, 8, Bottleneck, [256]],
+ [-1, 1, Conv, [512, 3, 2]], # 7-P4/16
+ [-1, 8, Bottleneck, [512]],
+ [-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
+ [-1, 4, Bottleneck, [1024]], # 10
+ ]
+
+# YOLOv3-SPP head
+head:
+ [[-1, 1, Bottleneck, [1024, False]],
+ [-1, 1, SPP, [512, [5, 9, 13]]],
+ [-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 6], 1, Concat, [1]], # cat backbone P3
+ [-1, 1, Bottleneck, [256, False]],
+ [-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)
+
+ [[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
+ ]
diff --git a/yolov7_seg/seg/models/hub/yolov3-tiny.yaml b/yolov7_seg/seg/models/hub/yolov3-tiny.yaml
new file mode 100644
index 000000000..f9ac6b177
--- /dev/null
+++ b/yolov7_seg/seg/models/hub/yolov3-tiny.yaml
@@ -0,0 +1,41 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,14, 23,27, 37,58] # P4/16
+ - [81,82, 135,169, 344,319] # P5/32
+
+# YOLOv3-tiny backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [16, 3, 1]], # 0
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 1-P1/2
+ [-1, 1, Conv, [32, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 3-P2/4
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 5-P3/8
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 7-P4/16
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 9-P5/32
+ [-1, 1, Conv, [512, 3, 1]],
+ [-1, 1, nn.ZeroPad2d, [[0, 1, 0, 1]]], # 11
+ [-1, 1, nn.MaxPool2d, [2, 1, 0]], # 12
+ ]
+
+# YOLOv3-tiny head
+head:
+ [[-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Conv, [256, 3, 1]], # 19 (P4/16-medium)
+
+ [[19, 15], 1, Detect, [nc, anchors]], # Detect(P4, P5)
+ ]
diff --git a/yolov7_seg/seg/models/hub/yolov3.yaml b/yolov7_seg/seg/models/hub/yolov3.yaml
new file mode 100644
index 000000000..22b29d22c
--- /dev/null
+++ b/yolov7_seg/seg/models/hub/yolov3.yaml
@@ -0,0 +1,51 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [10,13, 16,30, 33,23] # P3/8
+ - [30,61, 62,45, 59,119] # P4/16
+ - [116,90, 156,198, 373,326] # P5/32
+
+# darknet53 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Bottleneck, [64]],
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 2, Bottleneck, [128]],
+ [-1, 1, Conv, [256, 3, 2]], # 5-P3/8
+ [-1, 8, Bottleneck, [256]],
+ [-1, 1, Conv, [512, 3, 2]], # 7-P4/16
+ [-1, 8, Bottleneck, [512]],
+ [-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
+ [-1, 4, Bottleneck, [1024]], # 10
+ ]
+
+# YOLOv3 head
+head:
+ [[-1, 1, Bottleneck, [1024, False]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)
+
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 8], 1, Concat, [1]], # cat backbone P4
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Bottleneck, [512, False]],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)
+
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [[-1, 6], 1, Concat, [1]], # cat backbone P3
+ [-1, 1, Bottleneck, [256, False]],
+ [-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)
+
+ [[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
+ ]
diff --git a/yolov7_seg/seg/models/segment/yolov7-seg.yaml b/yolov7_seg/seg/models/segment/yolov7-seg.yaml
new file mode 100644
index 000000000..d678733e4
--- /dev/null
+++ b/yolov7_seg/seg/models/segment/yolov7-seg.yaml
@@ -0,0 +1,140 @@
+# YOLOv7
+
+# Parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+anchors:
+ - [12,16, 19,36, 40,28] # P3/8
+ - [36,75, 76,55, 72,146] # P4/16
+ - [142,110, 192,243, 459,401] # P5/32
+
+# YOLOv7 backbone
+backbone:
+ # [from, number, module, args]
+ [[-1, 1, Conv, [32, 3, 1]], # 0
+
+ [-1, 1, Conv, [64, 3, 2]], # 1-P1/2
+ [-1, 1, Conv, [64, 3, 1]],
+
+ [-1, 1, Conv, [128, 3, 2]], # 3-P2/4
+ [-1, 1, Conv, [64, 1, 1]],
+ [-2, 1, Conv, [64, 1, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 11
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [128, 1, 1]],
+ [-3, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 16-P3/8
+ [-1, 1, Conv, [128, 1, 1]],
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [512, 1, 1]], # 24
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-3, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 29-P4/16
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [1024, 1, 1]], # 37
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [512, 1, 1]],
+ [-3, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [512, 3, 2]],
+ [[-1, -3], 1, Concat, [1]], # 42-P5/32
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -3, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [1024, 1, 1]], # 50
+ ]
+
+# yolov7 head
+head:
+ [[-1, 1, SPPCSPC, [512]], # 51
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [37, 1, Conv, [256, 1, 1]], # route backbone P4
+ [[-1, -2], 1, Concat, [1]],
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 63
+
+ [-1, 1, Conv, [128, 1, 1]],
+ [-1, 1, nn.Upsample, [None, 2, 'nearest']],
+ [24, 1, Conv, [128, 1, 1]], # route backbone P3
+ [[-1, -2], 1, Concat, [1]],
+
+ [-1, 1, Conv, [128, 1, 1]],
+ [-2, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [-1, 1, Conv, [64, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [128, 1, 1]], # 75
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [128, 1, 1]],
+ [-3, 1, Conv, [128, 1, 1]],
+ [-1, 1, Conv, [128, 3, 2]],
+ [[-1, -3, 63], 1, Concat, [1]],
+
+ [-1, 1, Conv, [256, 1, 1]],
+ [-2, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [-1, 1, Conv, [128, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [256, 1, 1]], # 88
+
+ [-1, 1, MP, []],
+ [-1, 1, Conv, [256, 1, 1]],
+ [-3, 1, Conv, [256, 1, 1]],
+ [-1, 1, Conv, [256, 3, 2]],
+ [[-1, -3, 51], 1, Concat, [1]],
+
+ [-1, 1, Conv, [512, 1, 1]],
+ [-2, 1, Conv, [512, 1, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [-1, 1, Conv, [256, 3, 1]],
+ [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
+ [-1, 1, Conv, [512, 1, 1]], # 101
+
+ [75, 1, Conv, [256, 3, 1]],
+ [88, 1, Conv, [512, 3, 1]],
+ [101, 1, Conv, [1024, 3, 1]],
+
+ [[102, 103, 104], 1, ISegment, [nc, anchors, 32, 256]], # Detect(P3, P4, P5)
+ ]
diff --git a/yolov7_seg/seg/models/tf.py b/yolov7_seg/seg/models/tf.py
new file mode 100644
index 000000000..da7c3b128
--- /dev/null
+++ b/yolov7_seg/seg/models/tf.py
@@ -0,0 +1,574 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+TensorFlow, Keras and TFLite versions of YOLOv5
+Authored by https://github.com/zldrobit in PR https://github.com/ultralytics/yolov5/pull/1127
+
+Usage:
+ $ python models/tf.py --weights yolov5s.pt
+
+Export:
+ $ python export.py --weights yolov5s.pt --include saved_model pb tflite tfjs
+"""
+
+import argparse
+import sys
+from copy import deepcopy
+from pathlib import Path
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+# ROOT = ROOT.relative_to(Path.cwd()) # relative
+
+import numpy as np
+import tensorflow as tf
+import torch
+import torch.nn as nn
+from tensorflow import keras
+
+from models.common import (C3, SPP, SPPF, Bottleneck, BottleneckCSP, C3x, Concat, Conv, CrossConv, DWConv,
+ DWConvTranspose2d, Focus, autopad)
+from models.experimental import MixConv2d, attempt_load
+from models.yolo import Detect
+from utils.activations import SiLU
+from utils.general import LOGGER, make_divisible, print_args
+
+
+class TFBN(keras.layers.Layer):
+ # TensorFlow BatchNormalization wrapper
+ def __init__(self, w=None):
+ super().__init__()
+ self.bn = keras.layers.BatchNormalization(
+ beta_initializer=keras.initializers.Constant(w.bias.numpy()),
+ gamma_initializer=keras.initializers.Constant(w.weight.numpy()),
+ moving_mean_initializer=keras.initializers.Constant(w.running_mean.numpy()),
+ moving_variance_initializer=keras.initializers.Constant(w.running_var.numpy()),
+ epsilon=w.eps)
+
+ def call(self, inputs):
+ return self.bn(inputs)
+
+
+class TFPad(keras.layers.Layer):
+ # Pad inputs in spatial dimensions 1 and 2
+ def __init__(self, pad):
+ super().__init__()
+ if isinstance(pad, int):
+ self.pad = tf.constant([[0, 0], [pad, pad], [pad, pad], [0, 0]])
+ else: # tuple/list
+ self.pad = tf.constant([[0, 0], [pad[0], pad[0]], [pad[1], pad[1]], [0, 0]])
+
+ def call(self, inputs):
+ return tf.pad(inputs, self.pad, mode='constant', constant_values=0)
+
+
+class TFConv(keras.layers.Layer):
+ # Standard convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert g == 1, "TF v2.2 Conv2D does not support 'groups' argument"
+ # TensorFlow convolution padding is inconsistent with PyTorch (e.g. k=3 s=2 'SAME' padding)
+ # see https://stackoverflow.com/questions/52975843/comparing-conv2d-with-padding-between-tensorflow-and-pytorch
+ conv = keras.layers.Conv2D(
+ filters=c2,
+ kernel_size=k,
+ strides=s,
+ padding='SAME' if s == 1 else 'VALID',
+ use_bias=not hasattr(w, 'bn'),
+ kernel_initializer=keras.initializers.Constant(w.conv.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer='zeros' if hasattr(w, 'bn') else keras.initializers.Constant(w.conv.bias.numpy()))
+ self.conv = conv if s == 1 else keras.Sequential([TFPad(autopad(k, p)), conv])
+ self.bn = TFBN(w.bn) if hasattr(w, 'bn') else tf.identity
+ self.act = activations(w.act) if act else tf.identity
+
+ def call(self, inputs):
+ return self.act(self.bn(self.conv(inputs)))
+
+
+class TFDWConv(keras.layers.Layer):
+ # Depthwise convolution
+ def __init__(self, c1, c2, k=1, s=1, p=None, act=True, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert c2 % c1 == 0, f'TFDWConv() output={c2} must be a multiple of input={c1} channels'
+ conv = keras.layers.DepthwiseConv2D(
+ kernel_size=k,
+ depth_multiplier=c2 // c1,
+ strides=s,
+ padding='SAME' if s == 1 else 'VALID',
+ use_bias=not hasattr(w, 'bn'),
+ depthwise_initializer=keras.initializers.Constant(w.conv.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer='zeros' if hasattr(w, 'bn') else keras.initializers.Constant(w.conv.bias.numpy()))
+ self.conv = conv if s == 1 else keras.Sequential([TFPad(autopad(k, p)), conv])
+ self.bn = TFBN(w.bn) if hasattr(w, 'bn') else tf.identity
+ self.act = activations(w.act) if act else tf.identity
+
+ def call(self, inputs):
+ return self.act(self.bn(self.conv(inputs)))
+
+
+class TFDWConvTranspose2d(keras.layers.Layer):
+ # Depthwise ConvTranspose2d
+ def __init__(self, c1, c2, k=1, s=1, p1=0, p2=0, w=None):
+ # ch_in, ch_out, weights, kernel, stride, padding, groups
+ super().__init__()
+ assert c1 == c2, f'TFDWConv() output={c2} must be equal to input={c1} channels'
+ assert k == 4 and p1 == 1, 'TFDWConv() only valid for k=4 and p1=1'
+ weight, bias = w.weight.permute(2, 3, 1, 0).numpy(), w.bias.numpy()
+ self.c1 = c1
+ self.conv = [
+ keras.layers.Conv2DTranspose(filters=1,
+ kernel_size=k,
+ strides=s,
+ padding='VALID',
+ output_padding=p2,
+ use_bias=True,
+ kernel_initializer=keras.initializers.Constant(weight[..., i:i + 1]),
+ bias_initializer=keras.initializers.Constant(bias[i])) for i in range(c1)]
+
+ def call(self, inputs):
+ return tf.concat([m(x) for m, x in zip(self.conv, tf.split(inputs, self.c1, 3))], 3)[:, 1:-1, 1:-1]
+
+
+class TFFocus(keras.layers.Layer):
+ # Focus wh information into c-space
+ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True, w=None):
+ # ch_in, ch_out, kernel, stride, padding, groups
+ super().__init__()
+ self.conv = TFConv(c1 * 4, c2, k, s, p, g, act, w.conv)
+
+ def call(self, inputs): # x(b,w,h,c) -> y(b,w/2,h/2,4c)
+ # inputs = inputs / 255 # normalize 0-255 to 0-1
+ inputs = [inputs[:, ::2, ::2, :], inputs[:, 1::2, ::2, :], inputs[:, ::2, 1::2, :], inputs[:, 1::2, 1::2, :]]
+ return self.conv(tf.concat(inputs, 3))
+
+
+class TFBottleneck(keras.layers.Layer):
+ # Standard bottleneck
+ def __init__(self, c1, c2, shortcut=True, g=1, e=0.5, w=None): # ch_in, ch_out, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_, c2, 3, 1, g=g, w=w.cv2)
+ self.add = shortcut and c1 == c2
+
+ def call(self, inputs):
+ return inputs + self.cv2(self.cv1(inputs)) if self.add else self.cv2(self.cv1(inputs))
+
+
+class TFCrossConv(keras.layers.Layer):
+ # Cross Convolution
+ def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False, w=None):
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, (1, k), (1, s), w=w.cv1)
+ self.cv2 = TFConv(c_, c2, (k, 1), (s, 1), g=g, w=w.cv2)
+ self.add = shortcut and c1 == c2
+
+ def call(self, inputs):
+ return inputs + self.cv2(self.cv1(inputs)) if self.add else self.cv2(self.cv1(inputs))
+
+
+class TFConv2d(keras.layers.Layer):
+ # Substitution for PyTorch nn.Conv2D
+ def __init__(self, c1, c2, k, s=1, g=1, bias=True, w=None):
+ super().__init__()
+ assert g == 1, "TF v2.2 Conv2D does not support 'groups' argument"
+ self.conv = keras.layers.Conv2D(filters=c2,
+ kernel_size=k,
+ strides=s,
+ padding='VALID',
+ use_bias=bias,
+ kernel_initializer=keras.initializers.Constant(
+ w.weight.permute(2, 3, 1, 0).numpy()),
+ bias_initializer=keras.initializers.Constant(w.bias.numpy()) if bias else None)
+
+ def call(self, inputs):
+ return self.conv(inputs)
+
+
+class TFBottleneckCSP(keras.layers.Layer):
+ # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv2d(c1, c_, 1, 1, bias=False, w=w.cv2)
+ self.cv3 = TFConv2d(c_, c_, 1, 1, bias=False, w=w.cv3)
+ self.cv4 = TFConv(2 * c_, c2, 1, 1, w=w.cv4)
+ self.bn = TFBN(w.bn)
+ self.act = lambda x: keras.activations.swish(x)
+ self.m = keras.Sequential([TFBottleneck(c_, c_, shortcut, g, e=1.0, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ y1 = self.cv3(self.m(self.cv1(inputs)))
+ y2 = self.cv2(inputs)
+ return self.cv4(self.act(self.bn(tf.concat((y1, y2), axis=3))))
+
+
+class TFC3(keras.layers.Layer):
+ # CSP Bottleneck with 3 convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c1, c_, 1, 1, w=w.cv2)
+ self.cv3 = TFConv(2 * c_, c2, 1, 1, w=w.cv3)
+ self.m = keras.Sequential([TFBottleneck(c_, c_, shortcut, g, e=1.0, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ return self.cv3(tf.concat((self.m(self.cv1(inputs)), self.cv2(inputs)), axis=3))
+
+
+class TFC3x(keras.layers.Layer):
+ # 3 module with cross-convolutions
+ def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):
+ # ch_in, ch_out, number, shortcut, groups, expansion
+ super().__init__()
+ c_ = int(c2 * e) # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c1, c_, 1, 1, w=w.cv2)
+ self.cv3 = TFConv(2 * c_, c2, 1, 1, w=w.cv3)
+ self.m = keras.Sequential([
+ TFCrossConv(c_, c_, k=3, s=1, g=g, e=1.0, shortcut=shortcut, w=w.m[j]) for j in range(n)])
+
+ def call(self, inputs):
+ return self.cv3(tf.concat((self.m(self.cv1(inputs)), self.cv2(inputs)), axis=3))
+
+
+class TFSPP(keras.layers.Layer):
+ # Spatial pyramid pooling layer used in YOLOv3-SPP
+ def __init__(self, c1, c2, k=(5, 9, 13), w=None):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_ * (len(k) + 1), c2, 1, 1, w=w.cv2)
+ self.m = [keras.layers.MaxPool2D(pool_size=x, strides=1, padding='SAME') for x in k]
+
+ def call(self, inputs):
+ x = self.cv1(inputs)
+ return self.cv2(tf.concat([x] + [m(x) for m in self.m], 3))
+
+
+class TFSPPF(keras.layers.Layer):
+ # Spatial pyramid pooling-Fast layer
+ def __init__(self, c1, c2, k=5, w=None):
+ super().__init__()
+ c_ = c1 // 2 # hidden channels
+ self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)
+ self.cv2 = TFConv(c_ * 4, c2, 1, 1, w=w.cv2)
+ self.m = keras.layers.MaxPool2D(pool_size=k, strides=1, padding='SAME')
+
+ def call(self, inputs):
+ x = self.cv1(inputs)
+ y1 = self.m(x)
+ y2 = self.m(y1)
+ return self.cv2(tf.concat([x, y1, y2, self.m(y2)], 3))
+
+
+class TFDetect(keras.layers.Layer):
+ # TF YOLOv5 Detect layer
+ def __init__(self, nc=80, anchors=(), ch=(), imgsz=(640, 640), w=None): # detection layer
+ super().__init__()
+ self.stride = tf.convert_to_tensor(w.stride.numpy(), dtype=tf.float32)
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [tf.zeros(1)] * self.nl # init grid
+ self.anchors = tf.convert_to_tensor(w.anchors.numpy(), dtype=tf.float32)
+ self.anchor_grid = tf.reshape(self.anchors * tf.reshape(self.stride, [self.nl, 1, 1]), [self.nl, 1, -1, 1, 2])
+ self.m = [TFConv2d(x, self.no * self.na, 1, w=w.m[i]) for i, x in enumerate(ch)]
+ self.training = False # set to False after building model
+ self.imgsz = imgsz
+ for i in range(self.nl):
+ ny, nx = self.imgsz[0] // self.stride[i], self.imgsz[1] // self.stride[i]
+ self.grid[i] = self._make_grid(nx, ny)
+
+ def call(self, inputs):
+ z = [] # inference output
+ x = []
+ for i in range(self.nl):
+ x.append(self.m[i](inputs[i]))
+ # x(bs,20,20,255) to x(bs,3,20,20,85)
+ ny, nx = self.imgsz[0] // self.stride[i], self.imgsz[1] // self.stride[i]
+ x[i] = tf.reshape(x[i], [-1, ny * nx, self.na, self.no])
+
+ if not self.training: # inference
+ y = tf.sigmoid(x[i])
+ grid = tf.transpose(self.grid[i], [0, 2, 1, 3]) - 0.5
+ anchor_grid = tf.transpose(self.anchor_grid[i], [0, 2, 1, 3]) * 4
+ xy = (y[..., 0:2] * 2 + grid) * self.stride[i] # xy
+ wh = y[..., 2:4] ** 2 * anchor_grid
+ # Normalize xywh to 0-1 to reduce calibration error
+ xy /= tf.constant([[self.imgsz[1], self.imgsz[0]]], dtype=tf.float32)
+ wh /= tf.constant([[self.imgsz[1], self.imgsz[0]]], dtype=tf.float32)
+ y = tf.concat([xy, wh, y[..., 4:]], -1)
+ z.append(tf.reshape(y, [-1, self.na * ny * nx, self.no]))
+
+ return tf.transpose(x, [0, 2, 1, 3]) if self.training else (tf.concat(z, 1), x)
+
+ @staticmethod
+ def _make_grid(nx=20, ny=20):
+ # yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
+ # return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
+ xv, yv = tf.meshgrid(tf.range(nx), tf.range(ny))
+ return tf.cast(tf.reshape(tf.stack([xv, yv], 2), [1, 1, ny * nx, 2]), dtype=tf.float32)
+
+
+class TFUpsample(keras.layers.Layer):
+ # TF version of torch.nn.Upsample()
+ def __init__(self, size, scale_factor, mode, w=None): # warning: all arguments needed including 'w'
+ super().__init__()
+ assert scale_factor == 2, "scale_factor must be 2"
+ self.upsample = lambda x: tf.image.resize(x, (x.shape[1] * 2, x.shape[2] * 2), method=mode)
+ # self.upsample = keras.layers.UpSampling2D(size=scale_factor, interpolation=mode)
+ # with default arguments: align_corners=False, half_pixel_centers=False
+ # self.upsample = lambda x: tf.raw_ops.ResizeNearestNeighbor(images=x,
+ # size=(x.shape[1] * 2, x.shape[2] * 2))
+
+ def call(self, inputs):
+ return self.upsample(inputs)
+
+
+class TFConcat(keras.layers.Layer):
+ # TF version of torch.concat()
+ def __init__(self, dimension=1, w=None):
+ super().__init__()
+ assert dimension == 1, "convert only NCHW to NHWC concat"
+ self.d = 3
+
+ def call(self, inputs):
+ return tf.concat(inputs, self.d)
+
+
+def parse_model(d, ch, model, imgsz): # model_dict, input_channels(3)
+ LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m_str = m
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ try:
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+ except NameError:
+ pass
+
+ n = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in [
+ nn.Conv2d, Conv, DWConv, DWConvTranspose2d, Bottleneck, SPP, SPPF, MixConv2d, Focus, CrossConv,
+ BottleneckCSP, C3, C3x]:
+ c1, c2 = ch[f], args[0]
+ c2 = make_divisible(c2 * gw, 8) if c2 != no else c2
+
+ args = [c1, c2, *args[1:]]
+ if m in [BottleneckCSP, C3, C3x]:
+ args.insert(2, n)
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum(ch[-1 if x == -1 else x + 1] for x in f)
+ elif m is Detect:
+ args.append([ch[x + 1] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ args.append(imgsz)
+ else:
+ c2 = ch[f]
+
+ tf_m = eval('TF' + m_str.replace('nn.', ''))
+ m_ = keras.Sequential([tf_m(*args, w=model.model[i][j]) for j in range(n)]) if n > 1 \
+ else tf_m(*args, w=model.model[i]) # module
+
+ torch_m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum(x.numel() for x in torch_m_.parameters()) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ LOGGER.info(f'{i:>3}{str(f):>18}{str(n):>3}{np:>10} {t:<40}{str(args):<30}') # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ ch.append(c2)
+ return keras.Sequential(layers), sorted(save)
+
+
+class TFModel:
+ # TF YOLOv5 model
+ def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None, model=None, imgsz=(640, 640)): # model, channels, classes
+ super().__init__()
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg) as f:
+ self.yaml = yaml.load(f, Loader=yaml.FullLoader) # model dict
+
+ # Define model
+ if nc and nc != self.yaml['nc']:
+ LOGGER.info(f"Overriding {cfg} nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ self.model, self.savelist = parse_model(deepcopy(self.yaml), ch=[ch], model=model, imgsz=imgsz)
+
+ def predict(self,
+ inputs,
+ tf_nms=False,
+ agnostic_nms=False,
+ topk_per_class=100,
+ topk_all=100,
+ iou_thres=0.45,
+ conf_thres=0.25):
+ y = [] # outputs
+ x = inputs
+ for m in self.model.layers:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+
+ x = m(x) # run
+ y.append(x if m.i in self.savelist else None) # save output
+
+ # Add TensorFlow NMS
+ if tf_nms:
+ boxes = self._xywh2xyxy(x[0][..., :4])
+ probs = x[0][:, :, 4:5]
+ classes = x[0][:, :, 5:]
+ scores = probs * classes
+ if agnostic_nms:
+ nms = AgnosticNMS()((boxes, classes, scores), topk_all, iou_thres, conf_thres)
+ else:
+ boxes = tf.expand_dims(boxes, 2)
+ nms = tf.image.combined_non_max_suppression(boxes,
+ scores,
+ topk_per_class,
+ topk_all,
+ iou_thres,
+ conf_thres,
+ clip_boxes=False)
+ return nms, x[1]
+ return x[0] # output only first tensor [1,6300,85] = [xywh, conf, class0, class1, ...]
+ # x = x[0][0] # [x(1,6300,85), ...] to x(6300,85)
+ # xywh = x[..., :4] # x(6300,4) boxes
+ # conf = x[..., 4:5] # x(6300,1) confidences
+ # cls = tf.reshape(tf.cast(tf.argmax(x[..., 5:], axis=1), tf.float32), (-1, 1)) # x(6300,1) classes
+ # return tf.concat([conf, cls, xywh], 1)
+
+ @staticmethod
+ def _xywh2xyxy(xywh):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ x, y, w, h = tf.split(xywh, num_or_size_splits=4, axis=-1)
+ return tf.concat([x - w / 2, y - h / 2, x + w / 2, y + h / 2], axis=-1)
+
+
+class AgnosticNMS(keras.layers.Layer):
+ # TF Agnostic NMS
+ def call(self, input, topk_all, iou_thres, conf_thres):
+ # wrap map_fn to avoid TypeSpec related error https://stackoverflow.com/a/65809989/3036450
+ return tf.map_fn(lambda x: self._nms(x, topk_all, iou_thres, conf_thres),
+ input,
+ fn_output_signature=(tf.float32, tf.float32, tf.float32, tf.int32),
+ name='agnostic_nms')
+
+ @staticmethod
+ def _nms(x, topk_all=100, iou_thres=0.45, conf_thres=0.25): # agnostic NMS
+ boxes, classes, scores = x
+ class_inds = tf.cast(tf.argmax(classes, axis=-1), tf.float32)
+ scores_inp = tf.reduce_max(scores, -1)
+ selected_inds = tf.image.non_max_suppression(boxes,
+ scores_inp,
+ max_output_size=topk_all,
+ iou_threshold=iou_thres,
+ score_threshold=conf_thres)
+ selected_boxes = tf.gather(boxes, selected_inds)
+ padded_boxes = tf.pad(selected_boxes,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]], [0, 0]],
+ mode="CONSTANT",
+ constant_values=0.0)
+ selected_scores = tf.gather(scores_inp, selected_inds)
+ padded_scores = tf.pad(selected_scores,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]]],
+ mode="CONSTANT",
+ constant_values=-1.0)
+ selected_classes = tf.gather(class_inds, selected_inds)
+ padded_classes = tf.pad(selected_classes,
+ paddings=[[0, topk_all - tf.shape(selected_boxes)[0]]],
+ mode="CONSTANT",
+ constant_values=-1.0)
+ valid_detections = tf.shape(selected_inds)[0]
+ return padded_boxes, padded_scores, padded_classes, valid_detections
+
+
+def activations(act=nn.SiLU):
+ # Returns TF activation from input PyTorch activation
+ if isinstance(act, nn.LeakyReLU):
+ return lambda x: keras.activations.relu(x, alpha=0.1)
+ elif isinstance(act, nn.Hardswish):
+ return lambda x: x * tf.nn.relu6(x + 3) * 0.166666667
+ elif isinstance(act, (nn.SiLU, SiLU)):
+ return lambda x: keras.activations.swish(x)
+ else:
+ raise Exception(f'no matching TensorFlow activation found for PyTorch activation {act}')
+
+
+def representative_dataset_gen(dataset, ncalib=100):
+ # Representative dataset generator for use with converter.representative_dataset, returns a generator of np arrays
+ for n, (path, img, im0s, vid_cap, string) in enumerate(dataset):
+ im = np.transpose(img, [1, 2, 0])
+ im = np.expand_dims(im, axis=0).astype(np.float32)
+ im /= 255
+ yield [im]
+ if n >= ncalib:
+ break
+
+
+def run(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=(640, 640), # inference size h,w
+ batch_size=1, # batch size
+ dynamic=False, # dynamic batch size
+):
+ # PyTorch model
+ im = torch.zeros((batch_size, 3, *imgsz)) # BCHW image
+ model = attempt_load(weights, device=torch.device('cpu'), inplace=True, fuse=False)
+ _ = model(im) # inference
+ model.info()
+
+ # TensorFlow model
+ im = tf.zeros((batch_size, *imgsz, 3)) # BHWC image
+ tf_model = TFModel(cfg=model.yaml, model=model, nc=model.nc, imgsz=imgsz)
+ _ = tf_model.predict(im) # inference
+
+ # Keras model
+ im = keras.Input(shape=(*imgsz, 3), batch_size=None if dynamic else batch_size)
+ keras_model = keras.Model(inputs=im, outputs=tf_model.predict(im))
+ keras_model.summary()
+
+ LOGGER.info('PyTorch, TensorFlow and Keras models successfully verified.\nUse export.py for TF model export.')
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='weights path')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--dynamic', action='store_true', help='dynamic batch size')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/seg/models/yolo.py b/yolov7_seg/seg/models/yolo.py
new file mode 100644
index 000000000..e207ee045
--- /dev/null
+++ b/yolov7_seg/seg/models/yolo.py
@@ -0,0 +1,478 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+YOLO-specific modules
+
+Usage:
+ $ python models/yolo.py --cfg yolov5s.yaml
+"""
+
+import argparse
+import contextlib
+import os
+import platform
+import sys
+from copy import deepcopy
+from pathlib import Path
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+if platform.system() != 'Windows':
+ ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import *
+from models.experimental import *
+from utils.autoanchor import check_anchor_order
+from utils.general import LOGGER, check_version, check_yaml, make_divisible, print_args
+from utils.plots import feature_visualization
+from utils.torch_utils import (fuse_conv_and_bn, initialize_weights, model_info, profile, scale_img, select_device,
+ time_sync)
+
+try:
+ import thop # for FLOPs computation
+except ImportError:
+ thop = None
+
+
+class Detect(nn.Module):
+ # YOLOv5 Detect head for detection models
+ stride = None # strides computed during build
+ dynamic = False # force grid reconstruction
+ export = False # export mode
+
+ def __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layer
+ super().__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.empty(1)] * self.nl # init grid
+ self.anchor_grid = [torch.empty(1)] * self.nl # init anchor grid
+ self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+ self.inplace = inplace # use inplace ops (e.g. slice assignment)
+
+ def forward(self, x):
+ z = [] # inference output
+ for i in range(self.nl):
+ x[i] = self.m[i](x[i]) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
+
+ y = x[i].clone()
+ y[..., :5 + self.nc].sigmoid_()
+ if self.inplace:
+ y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
+ xy, wh, etc = y.split((2, 2, self.no - 4), 4) # tensor_split((2, 4, 5), 4) if torch 1.8.0
+ xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy
+ wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
+ y = torch.cat((xy, wh, etc), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
+
+ def _make_grid(self, nx=20, ny=20, i=0, torch_1_10=check_version(torch.__version__, '1.10.0')):
+ d = self.anchors[i].device
+ t = self.anchors[i].dtype
+ shape = 1, self.na, ny, nx, 2 # grid shape
+ y, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)
+ yv, xv = torch.meshgrid(y, x, indexing='ij') if torch_1_10 else torch.meshgrid(y, x) # torch>=0.7 compatibility
+ grid = torch.stack((xv, yv), 2).expand(shape) - 0.5 # add grid offset, i.e. y = 2.0 * x - 0.5
+ anchor_grid = (self.anchors[i] * self.stride[i]).view((1, self.na, 1, 1, 2)).expand(shape)
+ return grid, anchor_grid
+
+
+class IDetect(nn.Module):
+ # YOLOR Detect head for detection models
+ stride = None # strides computed during build
+ dynamic = False # force grid reconstruction
+ export = False # export mode
+
+ def __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layer
+ super().__init__()
+ self.nc = nc # number of classes
+ self.no = nc + 5 # number of outputs per anchor
+ self.nl = len(anchors) # number of detection layers
+ self.na = len(anchors[0]) // 2 # number of anchors
+ self.grid = [torch.empty(1)] * self.nl # init grid
+ self.anchor_grid = [torch.empty(1)] * self.nl # init anchor grid
+ self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+ self.inplace = inplace # use inplace ops (e.g. slice assignment)
+
+ self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
+ self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
+
+ def forward(self, x):
+ z = [] # inference output
+ for i in range(self.nl):
+ x[i] = self.m[i](self.ia[i](x[i])) # conv
+ bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
+ x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
+
+ if not self.training: # inference
+ if self.dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
+ self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
+
+ y = x[i].clone()
+ y[..., :5 + self.nc].sigmoid_()
+ if self.inplace:
+ y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xy
+ y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
+ else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
+ xy, wh, etc = y.split((2, 2, self.no - 4), 4) # tensor_split((2, 4, 5), 4) if torch 1.8.0
+ xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy
+ wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
+ y = torch.cat((xy, wh, etc), 4)
+ z.append(y.view(bs, -1, self.no))
+
+ return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
+
+ def _make_grid(self, nx=20, ny=20, i=0, torch_1_10=check_version(torch.__version__, '1.10.0')):
+ d = self.anchors[i].device
+ t = self.anchors[i].dtype
+ shape = 1, self.na, ny, nx, 2 # grid shape
+ y, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)
+ yv, xv = torch.meshgrid(y, x, indexing='ij') if torch_1_10 else torch.meshgrid(y, x) # torch>=0.7 compatibility
+ grid = torch.stack((xv, yv), 2).expand(shape) - 0.5 # add grid offset, i.e. y = 2.0 * x - 0.5
+ anchor_grid = (self.anchors[i] * self.stride[i]).view((1, self.na, 1, 1, 2)).expand(shape)
+ return grid, anchor_grid
+
+
+class Segment(Detect):
+ # YOLOv5 Segment head for segmentation models
+ def __init__(self, nc=80, anchors=(), nm=32, npr=256, ch=(), inplace=True):
+ super().__init__(nc, anchors, ch, inplace)
+ self.nm = nm # number of masks
+ self.npr = npr # number of protos
+ self.no = 5 + nc + self.nm # number of outputs per anchor
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+ self.proto = Proto(ch[0], self.npr, self.nm) # protos
+ self.detect = Detect.forward
+
+ def forward(self, x):
+ p = self.proto(x[0])
+ x = self.detect(self, x)
+ return (x, p) if self.training else (x[0], p) if self.export else (x[0], (x[1], p))
+
+
+class ISegment(IDetect):
+ # YOLOR Segment head for segmentation models
+ def __init__(self, nc=80, anchors=(), nm=32, npr=256, ch=(), inplace=True):
+ super().__init__(nc, anchors, ch, inplace)
+ self.nm = nm # number of masks
+ self.npr = npr # number of protos
+ self.no = 5 + nc + self.nm # number of outputs per anchor
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
+ self.proto = Proto(ch[0], self.npr, self.nm) # protos
+ self.detect = IDetect.forward
+
+ def forward(self, x):
+ p = self.proto(x[0])
+ x = self.detect(self, x)
+ return (x, p) if self.training else (x[0], p) if self.export else (x[0], (x[1], p))
+
+
+class IRSegment(IDetect):
+ # YOLOR Segment head for segmentation models
+ def __init__(self, nc=80, anchors=(), nm=32, npr=256, ch=(), inplace=True):
+ super().__init__(nc, anchors, ch, inplace)
+ self.nm = nm # number of masks
+ self.npr = npr # number of protos
+ self.no = 5 + nc + self.nm # number of outputs per anchor
+ self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[self.nl:]) # output conv
+ self.refine = Refine(ch[:self.nl], self.npr, self.nm) # protos
+ self.detect = IDetect.forward
+
+ def forward(self, x):
+ p = self.refine(x[:self.nl])
+ x = self.detect(self, x[self.nl:])
+ return (x, p) if self.training else (x[0], p) if self.export else (x[0], (x[1], p))
+
+
+class BaseModel(nn.Module):
+ # YOLOv5 base model
+ def forward(self, x, profile=False, visualize=False):
+ return self._forward_once(x, profile, visualize) # single-scale inference, train
+
+ def _forward_once(self, x, profile=False, visualize=False):
+ y, dt = [], [] # outputs
+ for m in self.model:
+ if m.f != -1: # if not from previous layer
+ x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
+ if profile:
+ self._profile_one_layer(m, x, dt)
+ x = m(x) # run
+ y.append(x if m.i in self.save else None) # save output
+ if visualize:
+ feature_visualization(x, m.type, m.i, save_dir=visualize)
+ return x
+
+ def _profile_one_layer(self, m, x, dt):
+ c = m == self.model[-1] # is final layer, copy input as inplace fix
+ o = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPs
+ t = time_sync()
+ for _ in range(10):
+ m(x.copy() if c else x)
+ dt.append((time_sync() - t) * 100)
+ if m == self.model[0]:
+ LOGGER.info(f"{'time (ms)':>10s} {'GFLOPs':>10s} {'params':>10s} module")
+ LOGGER.info(f'{dt[-1]:10.2f} {o:10.2f} {m.np:10.0f} {m.type}')
+ if c:
+ LOGGER.info(f"{sum(dt):10.2f} {'-':>10s} {'-':>10s} Total")
+
+ def fuse(self): # fuse model Conv2d() + BatchNorm2d() layers
+ LOGGER.info('Fusing layers... ')
+ for m in self.model.modules():
+ if isinstance(m, (Conv, DWConv)) and hasattr(m, 'bn'):
+ m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
+ delattr(m, 'bn') # remove batchnorm
+ m.forward = m.forward_fuse # update forward
+ self.info()
+ return self
+
+ def info(self, verbose=False, img_size=640): # print model information
+ model_info(self, verbose, img_size)
+
+ def _apply(self, fn):
+ # Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers
+ self = super()._apply(fn)
+ m = self.model[-1] # Detect()
+ if isinstance(m, (Detect, IDetect, Segment, ISegment, IRSegment)):
+ m.stride = fn(m.stride)
+ m.grid = list(map(fn, m.grid))
+ if isinstance(m.anchor_grid, list):
+ m.anchor_grid = list(map(fn, m.anchor_grid))
+ return self
+
+
+class DetectionModel(BaseModel):
+ # YOLOv5 detection model
+ def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classes
+ super().__init__()
+ if isinstance(cfg, dict):
+ self.yaml = cfg # model dict
+ else: # is *.yaml
+ import yaml # for torch hub
+ self.yaml_file = Path(cfg).name
+ with open(cfg, encoding='ascii', errors='ignore') as f:
+ self.yaml = yaml.safe_load(f) # model dict
+
+ # Define model
+ ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels
+ if nc and nc != self.yaml['nc']:
+ LOGGER.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
+ self.yaml['nc'] = nc # override yaml value
+ if anchors:
+ LOGGER.info(f'Overriding model.yaml anchors with anchors={anchors}')
+ self.yaml['anchors'] = round(anchors) # override yaml value
+ self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist
+ self.names = [str(i) for i in range(self.yaml['nc'])] # default names
+ self.inplace = self.yaml.get('inplace', True)
+
+ # Build strides, anchors
+ m = self.model[-1] # Detect()
+ if isinstance(m, (Detect, IDetect, Segment, ISegment, IRSegment)):
+ s = 256 # 2x min stride
+ m.inplace = self.inplace
+ forward = lambda x: self.forward(x)[0] if isinstance(m, (Segment, ISegment, IRSegment)) else self.forward(x)
+ m.stride = torch.tensor([s / x.shape[-2] for x in forward(torch.zeros(1, ch, s, s))]) # forward
+ check_anchor_order(m)
+ m.anchors /= m.stride.view(-1, 1, 1)
+ self.stride = m.stride
+ self._initialize_biases() # only run once
+
+ # Init weights, biases
+ initialize_weights(self)
+ self.info()
+ LOGGER.info('')
+
+ def forward(self, x, augment=False, profile=False, visualize=False):
+ if augment:
+ return self._forward_augment(x) # augmented inference, None
+ return self._forward_once(x, profile, visualize) # single-scale inference, train
+
+ def _forward_augment(self, x):
+ img_size = x.shape[-2:] # height, width
+ s = [1, 0.83, 0.67] # scales
+ f = [None, 3, None] # flips (2-ud, 3-lr)
+ y = [] # outputs
+ for si, fi in zip(s, f):
+ xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
+ yi = self._forward_once(xi)[0] # forward
+ # cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # save
+ yi = self._descale_pred(yi, fi, si, img_size)
+ y.append(yi)
+ y = self._clip_augmented(y) # clip augmented tails
+ return torch.cat(y, 1), None # augmented inference, train
+
+ def _descale_pred(self, p, flips, scale, img_size):
+ # de-scale predictions following augmented inference (inverse operation)
+ if self.inplace:
+ p[..., :4] /= scale # de-scale
+ if flips == 2:
+ p[..., 1] = img_size[0] - p[..., 1] # de-flip ud
+ elif flips == 3:
+ p[..., 0] = img_size[1] - p[..., 0] # de-flip lr
+ else:
+ x, y, wh = p[..., 0:1] / scale, p[..., 1:2] / scale, p[..., 2:4] / scale # de-scale
+ if flips == 2:
+ y = img_size[0] - y # de-flip ud
+ elif flips == 3:
+ x = img_size[1] - x # de-flip lr
+ p = torch.cat((x, y, wh, p[..., 4:]), -1)
+ return p
+
+ def _clip_augmented(self, y):
+ # Clip YOLOv5 augmented inference tails
+ nl = self.model[-1].nl # number of detection layers (P3-P5)
+ g = sum(4 ** x for x in range(nl)) # grid points
+ e = 1 # exclude layer count
+ i = (y[0].shape[1] // g) * sum(4 ** x for x in range(e)) # indices
+ y[0] = y[0][:, :-i] # large
+ i = (y[-1].shape[1] // g) * sum(4 ** (nl - 1 - x) for x in range(e)) # indices
+ y[-1] = y[-1][:, i:] # small
+ return y
+
+ def _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
+ # https://arxiv.org/abs/1708.02002 section 3.3
+ # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
+ m = self.model[-1] # Detect() module
+ for mi, s in zip(m.m, m.stride): # from
+ b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
+ b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
+ b.data[:, 5:5 + m.nc] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
+ mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
+
+
+Model = DetectionModel # retain YOLOv5 'Model' class for backwards compatibility
+
+
+class SegmentationModel(DetectionModel):
+ # YOLOv5 segmentation model
+ def __init__(self, cfg='yolov5s-seg.yaml', ch=3, nc=None, anchors=None):
+ super().__init__(cfg, ch, nc, anchors)
+
+
+class ClassificationModel(BaseModel):
+ # YOLOv5 classification model
+ def __init__(self, cfg=None, model=None, nc=1000, cutoff=10): # yaml, model, number of classes, cutoff index
+ super().__init__()
+ self._from_detection_model(model, nc, cutoff) if model is not None else self._from_yaml(cfg)
+
+ def _from_detection_model(self, model, nc=1000, cutoff=10):
+ # Create a YOLOv5 classification model from a YOLOv5 detection model
+ if isinstance(model, DetectMultiBackend):
+ model = model.model # unwrap DetectMultiBackend
+ model.model = model.model[:cutoff] # backbone
+ m = model.model[-1] # last layer
+ ch = m.conv.in_channels if hasattr(m, 'conv') else m.cv1.conv.in_channels # ch into module
+ c = Classify(ch, nc) # Classify()
+ c.i, c.f, c.type = m.i, m.f, 'models.common.Classify' # index, from, type
+ model.model[-1] = c # replace
+ self.model = model.model
+ self.stride = model.stride
+ self.save = []
+ self.nc = nc
+
+ def _from_yaml(self, cfg):
+ # Create a YOLOv5 classification model from a *.yaml file
+ self.model = None
+
+
+def parse_model(d, ch): # model_dict, input_channels(3)
+ LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")
+ anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
+ na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
+ no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
+
+ layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
+ for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
+ m = eval(m) if isinstance(m, str) else m # eval strings
+ for j, a in enumerate(args):
+ with contextlib.suppress(NameError):
+ args[j] = eval(a) if isinstance(a, str) else a # eval strings
+
+ n = n_ = max(round(n * gd), 1) if n > 1 else n # depth gain
+ if m in {
+ Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, MixConv2d, Focus, CrossConv,
+ BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x, SPPCSPC}:
+ c1, c2 = ch[f], args[0]
+ if c2 != no: # if not output
+ c2 = make_divisible(c2 * gw, 8)
+
+ args = [c1, c2, *args[1:]]
+ if m in {BottleneckCSP, C3, C3TR, C3Ghost, C3x, SPPCSPC}:
+ args.insert(2, n) # number of repeats
+ n = 1
+ elif m is nn.BatchNorm2d:
+ args = [ch[f]]
+ elif m is Concat:
+ c2 = sum(ch[x] for x in f)
+ # TODO: channel, gw, gd
+ elif m in {Detect, IDetect, Segment, ISegment, IRSegment}:
+ args.append([ch[x] for x in f])
+ if isinstance(args[1], int): # number of anchors
+ args[1] = [list(range(args[1] * 2))] * len(f)
+ if m in {Segment, ISegment, IRSegment}:
+ args[3] = make_divisible(args[3] * gw, 8)
+ elif m is Contract:
+ c2 = ch[f] * args[0] ** 2
+ elif m is Expand:
+ c2 = ch[f] // args[0] ** 2
+ else:
+ c2 = ch[f]
+
+ m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
+ t = str(m)[8:-2].replace('__main__.', '') # module type
+ np = sum(x.numel() for x in m_.parameters()) # number params
+ m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
+ LOGGER.info(f'{i:>3}{str(f):>18}{n_:>3}{np:10.0f} {t:<40}{str(args):<30}') # print
+ save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
+ layers.append(m_)
+ if i == 0:
+ ch = []
+ ch.append(c2)
+ return nn.Sequential(*layers), sorted(save)
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--cfg', type=str, default='yolov5s.yaml', help='model.yaml')
+ parser.add_argument('--batch-size', type=int, default=1, help='total batch size for all GPUs')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--profile', action='store_true', help='profile model speed')
+ parser.add_argument('--line-profile', action='store_true', help='profile model speed layer by layer')
+ parser.add_argument('--test', action='store_true', help='test all yolo*.yaml')
+ opt = parser.parse_args()
+ opt.cfg = check_yaml(opt.cfg) # check YAML
+ print_args(vars(opt))
+ device = select_device(opt.device)
+
+ # Create model
+ im = torch.rand(opt.batch_size, 3, 640, 640).to(device)
+ model = Model(opt.cfg).to(device)
+
+ # Options
+ if opt.line_profile: # profile layer by layer
+ model(im, profile=True)
+
+ elif opt.profile: # profile forward-backward
+ results = profile(input=im, ops=[model], n=3)
+
+ elif opt.test: # test all models
+ for cfg in Path(ROOT / 'models').rglob('yolo*.yaml'):
+ try:
+ _ = Model(cfg)
+ except Exception as e:
+ print(f'Error in {cfg}: {e}')
+
+ else: # report fused model summary
+ model.fuse()
diff --git a/yolov7_seg/seg/requirements.txt b/yolov7_seg/seg/requirements.txt
new file mode 100644
index 000000000..0f282135e
--- /dev/null
+++ b/yolov7_seg/seg/requirements.txt
@@ -0,0 +1,43 @@
+# YOLOv5 requirements
+# Usage: pip install -r requirements.txt
+
+# Base ----------------------------------------
+matplotlib>=3.2.2
+numpy>=1.18.5
+opencv-python>=4.1.1
+Pillow>=7.1.2
+PyYAML>=5.3.1
+requests>=2.23.0
+scipy>=1.4.1
+torch>=1.7.0
+torchvision>=0.8.1
+tqdm>=4.64.0
+protobuf<=3.20.1 # https://github.com/ultralytics/yolov5/issues/8012
+
+# Logging -------------------------------------
+tensorboard>=2.4.1
+# wandb
+# clearml
+
+# Plotting ------------------------------------
+pandas>=1.1.4
+seaborn>=0.11.0
+
+# Export --------------------------------------
+# coremltools>=5.2 # CoreML export
+# onnx>=1.9.0 # ONNX export
+# onnx-simplifier>=0.4.1 # ONNX simplifier
+# nvidia-pyindex # TensorRT export
+# nvidia-tensorrt # TensorRT export
+# scikit-learn==0.19.2 # CoreML quantization
+# tensorflow>=2.4.1 # TFLite export (or tensorflow-cpu, tensorflow-aarch64)
+# tensorflowjs>=3.9.0 # TF.js export
+# openvino-dev # OpenVINO export
+
+# Extras --------------------------------------
+ipython # interactive notebook
+psutil # system utilization
+thop>=0.1.1 # FLOPs computation
+# albumentations>=1.0.3
+# pycocotools>=2.0 # COCO mAP
+# roboflow
diff --git a/yolov7_seg/seg/segment/predict.py b/yolov7_seg/seg/segment/predict.py
new file mode 100644
index 000000000..0b8f393a0
--- /dev/null
+++ b/yolov7_seg/seg/segment/predict.py
@@ -0,0 +1,425 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run YOLOv5 segmentation inference on images, videos, directories, streams, etc.
+
+Usage - sources:
+ $ python segment/predict.py --weights yolov5s-seg.pt --source 0 # webcam
+ img.jpg # image
+ vid.mp4 # video
+ path/ # directory
+ 'path/*.jpg' # glob
+ 'https://youtu.be/Zgi9g1ksQHc' # YouTube
+ 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
+
+Usage - formats:
+ $ python segment/predict.py --weights yolov5s-seg.pt # PyTorch
+ yolov5s-seg.torchscript # TorchScript
+ yolov5s-seg.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s-seg.xml # OpenVINO
+ yolov5s-seg.engine # TensorRT
+ yolov5s-seg.mlmodel # CoreML (macOS-only)
+ yolov5s-seg_saved_model # TensorFlow SavedModel
+ yolov5s-seg.pb # TensorFlow GraphDef
+ yolov5s-seg.tflite # TensorFlow Lite
+ yolov5s-seg_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import random
+import numpy as np
+import cv2
+from datetime import datetime
+
+import argparse
+import os
+import platform
+import sys
+from pathlib import Path
+
+import torch
+import torch.backends.cudnn as cudnn
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.dataloaders import IMG_FORMATS, VID_FORMATS, LoadImages, LoadStreams
+from utils.general import (LOGGER, Profile, check_file, check_img_size, check_imshow, check_requirements, colorstr, cv2,
+ increment_path, non_max_suppression, print_args, scale_coords, strip_optimizer, xyxy2xywh)
+from utils.plots import Annotator, colors, save_one_box
+from utils.segment.general import process_mask, scale_masks
+from utils.segment.plots import plot_masks
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+@smart_inference_mode()
+def run(
+ weights='../yolov7-seg.pt', # model.pt path(s)
+ source='../testx.mp4', # file/dir/URL/glob, 0 for webcam
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ imgsz=(640, 640), # inference size (height, width)
+ conf_thres=0.25, # confidence threshold
+ iou_thres=0.45, # NMS IOU threshold
+ max_det=1000, # maximum detections per image
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ view_img=False, # show results
+ save_txt=False, # save results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_crop=False, # save cropped prediction boxes
+ nosave=False, # do not save images/videos
+ classes=None, # filter by class: --class 0, or --class 0 2 3
+ agnostic_nms=False, # class-agnostic NMS
+ augment=False, # augmented inference
+ visualize=False, # visualize features
+ update=False, # update all models
+ project=ROOT / 'runs/predict-seg', # save results to project/name
+ name='exp', # save results to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ line_thickness=1, # bounding box thickness (pixels)
+ hide_labels=False, # hide labels
+ hide_conf=False, # hide confidences
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+):
+ font = cv2.FONT_HERSHEY_SIMPLEX
+
+ source = str(source)
+ save_img = not nosave and not source.endswith('.txt') # save inference images
+ is_file = Path(source).suffix[1:] in (IMG_FORMATS + VID_FORMATS)
+ is_url = source.lower().startswith(('rtsp://', 'rtmp://', 'http://', 'https://'))
+ webcam = source.isnumeric() or source.endswith('.txt') or (is_url and not is_file)
+ if is_url and is_file:
+ source = check_file(source) # download
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ device = select_device(device)
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, names, pt = model.stride, model.names, model.pt
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+
+ # Dataloader
+ if webcam:
+ view_img = check_imshow()
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride, auto=pt)
+ bs = len(dataset) # batch_size
+ else:
+ dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt)
+ bs = 1 # batch_size
+ vid_path, vid_writer = [None] * bs, [None] * bs
+
+ # Run inference
+ model.warmup(imgsz=(1 if pt else bs, 3, *imgsz)) # warmup
+ seen, windows, dt = 0, [], (Profile(), Profile(), Profile())
+
+ TOTAL = 0
+ person = 0
+ bicycle = 0
+ car = 0
+ motorcycle = 0
+ bus = 0
+ truck = 0
+ traffic_light = 0
+ stop_sign = 0
+ parking_meter = 0
+ potted_plant = 0
+ clock = 0
+
+ for path, im, im0s, vid_cap, s in dataset:
+ with dt[0]:
+ im = torch.from_numpy(im).to(device)
+ im = im.half() if model.fp16 else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ if len(im.shape) == 3:
+ im = im[None] # expand for batch dim
+
+ # Inference
+ with dt[1]:
+ visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False
+ pred, out = model(im, augment=augment, visualize=visualize)
+ proto = out[1]
+
+ # NMS
+ with dt[2]:
+ pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det, nm=32)
+
+ # Second-stage classifier (optional)
+ # pred = utils.general.apply_classifier(pred, classifier_model, im, im0s)
+
+
+ current_frame = 0
+ # Process predictions
+ for i, det in enumerate(pred): # per image
+ seen += 1
+ if webcam: # batch_size >= 1
+ p, im0, frame = path[i], im0s[i].copy(), dataset.count
+ s += f'{i}: '
+ else:
+ p, im0, frame = path, im0s.copy(), getattr(dataset, 'frame', 0)
+
+ # im0 = cv2.resize(im0, (640, 480))
+
+ p = Path(p) # to Path
+ save_path = str(save_dir / p.name) # im.jpg
+ txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # im.txt
+ s += '%gx%g ' % im.shape[2:] # print string
+ gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
+ imc = im0.copy() if save_crop else im0 # for save_crop
+ annotator = Annotator(im0, line_width=line_thickness, example=str(names))
+ if len(det):
+ masks = process_mask(proto[i], det[:, 6:], det[:, :4], im.shape[2:], upsample=True) # HWC
+
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(im.shape[2:], det[:, :4], im0.shape).round()
+
+ # Print results
+ for c in det[:, 5].unique():
+ n = (det[:, 5] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Mask plotting ----------------------------------------------------------------------------------------
+ mcolors = [colors(int(cls), True) for cls in det[:, 5]]
+ im_masks = plot_masks(im[i], masks, mcolors) # image with masks shape(imh,imw,3)
+ annotator.im = scale_masks(im.shape[2:], im_masks, im0.shape) # scale to original h, w
+ # Mask plotting ----------------------------------------------------------------------------------------
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det[:, :6]):
+ if save_txt: # Write to file
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(f'{txt_path}.txt', 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+
+
+ if save_img or save_crop or view_img: # Add bbox to image
+ c = int(cls) # integer class
+ label = None if hide_labels else (names[c] if hide_conf else f'{names[c]} {conf:.2f}')
+ #label = f'{names[int(cls)]} {conf:.2f}'
+ TOTAL += 1
+ labelx = names[int(cls)]
+ print(labelx)
+ current_frame += 1
+ # plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=1)
+ if labelx == 'person':
+ # plot_one_box(xyxy, im0, label=label, color=colors[0], line_thickness=1)
+ person += 1
+ elif labelx == 'bicycle':
+ # plot_one_box(xyxy, im0, label=label, color=colors[1], line_thickness=1)
+ bicycle += 1
+ elif labelx == 'car':
+ # plot_one_box(xyxy, im0, label=label, color=colors[2], line_thickness=1)
+ car += 1
+ elif labelx == 'motorcycle':
+ # plot_one_box(xyxy, im0, label=label, color=colors[3], line_thickness=1)
+ motorcycle += 1
+ elif labelx == 'bus':
+ # plot_one_box(xyxy, im0, label=label, color=colors[4], line_thickness=1)
+ bus += 1
+ elif labelx == 'truck':
+ # plot_one_box(xyxy, im0, label=label, color=colors[5], line_thickness=1)
+ truck += 1
+ elif labelx == 'traffic light':
+ # plot_one_box(xyxy, im0, label=label, color=colors[6], line_thickness=1)
+ traffic_light += 1
+ elif labelx == 'stop sign':
+ # plot_one_box(xyxy, im0, label=label, color=colors[7], line_thickness=1)
+ stop_sign += 1
+ elif labelx == 'parking meter':
+ # plot_one_box(xyxy, im0, label=label, color=colors[8], line_thickness=1)
+ parking_meter += 1
+ elif labelx == 'potted plant':
+ # plot_one_box(xyxy, im0, label=label, color=colors[9], line_thickness=1)
+ potted_plant += 1
+ elif labelx == 'clock':
+ # plot_one_box(xyxy, im0, label=label, color=colors[10], line_thickness=1)
+ clock += 1
+ # else:
+ # #plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=1)
+ annotator.box_label(xyxy, label, color=colors(c, True))
+ print(label)
+ if save_crop:
+ save_one_box(xyxy, imc, file=save_dir / 'crops' / names[c] / f'{p.stem}.jpg', BGR=True)
+
+ # Stream results
+ im0 = annotator.result()
+ if view_img:
+ if platform.system() == 'Linux' and p not in windows:
+ windows.append(p)
+ cv2.namedWindow(str(p), cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO) # allow window resize (Linux)
+ cv2.resizeWindow(str(p), im0.shape[1], im0.shape[0])
+ cv2.imshow(str(p), im0)
+ cv2.waitKey(1) # 1 millisecond
+
+ (H, W) = im0.shape[:2]
+
+ print(" ")
+
+ # Get names and colors
+ names = model.module.names if hasattr(model, 'module') else model.names
+
+ # colors = [(255, 255, 255), (255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255), (255, 0, 255)
+ # , (155, 255, 100), (255, 155, 100), (155, 100, 255), (155, 155, 100)]
+
+ colorsx = [[random.randint(0, 255) for _ in range(3)] for _ in names]
+
+ colorsx[0:11] = [(255, 255, 255), (255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255),
+ (255, 0, 255)
+ , (155, 255, 100), (255, 155, 100), (155, 100, 255), (155, 155, 100)]
+
+ cv2.putText(im0, "oneAPI ODAV", (550, 40),
+ font, 0.7 * 1, (255, 255, 255), 2)
+ cv2.rectangle(im0, (20, 50), (W - 20, 15), (255, 255, 255), 2)
+
+ sub_img = im0[H - 300: H, 0:200]
+ black_rect = np.ones(sub_img.shape, dtype=np.uint8) * 0
+
+ res = cv2.addWeighted(sub_img, 0.8, black_rect, 0.2, 1.0)
+
+ im0[H - 300:H + 40, 0:200] = res
+
+ cv2.putText(im0, str("PERSON: " + str(person)), (30, H - 280),
+ font, 0.4 * 1, colorsx[0], 1)
+ cv2.rectangle(im0, (10, H - 280), (20, H - 285), colorsx[0], 7)
+
+ cv2.putText(im0, str("BICYCLE: " + str(bicycle)), (30, H - 255),
+ font, 0.4 * 1, colorsx[1], 1)
+ cv2.rectangle(im0, (10, H - 255), (20, H - 260), colorsx[1], 7)
+
+ cv2.putText(im0, str("CAR: " + str(car)), (30, H - 230),
+ font, 0.4 * 1, colorsx[2], 1)
+ cv2.rectangle(im0, (10, H - 230), (20, H - 235), colorsx[2], 7)
+
+ cv2.putText(im0, str("MOTORCYCLE: " + str(motorcycle)), (30, H - 205),
+ font, 0.4 * 1, colorsx[3], 1)
+ cv2.rectangle(im0, (10, H - 205), (20, H - 210), colorsx[3], 7)
+
+ cv2.putText(im0, str("BUS: " + str(bus)), (30, H - 180),
+ font, 0.4 * 1, colorsx[4], 1)
+ cv2.rectangle(im0, (10, H - 180), (20, H - 185), colorsx[4], 7)
+
+ cv2.putText(im0, str("TRUCK: " + str(truck)), (30, H - 155),
+ font, 0.4 * 1, colorsx[5], 1)
+ cv2.rectangle(im0, (10, H - 155), (20, H - 160), colorsx[5], 7)
+
+ cv2.putText(im0, str("TRAFFIC LIGHT: " + str(traffic_light)), (30, H - 130),
+ font, 0.4 * 1, colorsx[6], 1)
+ cv2.rectangle(im0, (10, H - 130), (20, H - 135), colorsx[6], 7)
+
+ cv2.putText(im0, str("STOP SIGN: " + str(stop_sign)), (30, H - 105),
+ font, 0.4 * 1, colorsx[7], 1)
+ cv2.rectangle(im0, (10, H - 105), (20, H - 100), colorsx[7], 7)
+
+ cv2.putText(im0, str("PARKING METER: " + str(parking_meter)), (30, H - 80),
+ font, 0.4 * 1, colorsx[8], 1)
+ cv2.rectangle(im0, (10, H - 80), (20, H - 85), colorsx[8], 7)
+
+ cv2.putText(im0, str("POTTED PLANT: " + str(potted_plant)), (30, H - 55),
+ font, 0.4 * 1, colorsx[9], 1)
+ cv2.rectangle(im0, (10, H - 55), (20, H - 60), colorsx[9], 7)
+
+ cv2.putText(im0, str("CLOCK: " + str(clock)), (30, H - 30),
+ font, 0.4 * 1, colorsx[10], 1)
+ cv2.rectangle(im0, (10, H - 30), (20, H - 35), colorsx[10], 7)
+
+ cv2.putText(im0, str("TOTAL: " + str(TOTAL)), (30, H - 5),
+ font, 0.4 * 1, (0, 0, 0), 1)
+
+ cv2.putText(im0, str("CURRENT FRAME: " + str(current_frame)), (W - 225, H - 35),
+ font, 0.7 * 1, (0, 0, 255), 2)
+
+ now = datetime.now()
+
+ timex = str(now.strftime("%d/%m/%Y %H:%M:%S"))
+ cv2.putText(im0, timex, (W - 200, H - 10),
+ font, 0.5 * 1, (255, 255, 255), 1)
+
+ # cv2.namedWindow("Output", cv2.WINDOW_NORMAL)
+ # cv2.setWindowProperty("Output", cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN)
+ # cv2.imshow("Output", im0)
+ #
+ # if (cv2.waitKey(1) & 0xFF == ord('q')):
+ # break
+
+ # Save results (image with detections)
+ if save_img:
+ if dataset.mode == 'image':
+ cv2.imwrite(save_path, im0)
+ else: # 'video' or 'stream'
+ if vid_path[i] != save_path: # new video
+ vid_path[i] = save_path
+ if isinstance(vid_writer[i], cv2.VideoWriter):
+ vid_writer[i].release() # release previous video writer
+ if vid_cap: # video
+ fps = vid_cap.get(cv2.CAP_PROP_FPS)
+ w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ else: # stream
+ fps, w, h = 30, im0.shape[1], im0.shape[0]
+ save_path = str(Path(save_path).with_suffix('.mp4')) # force *.mp4 suffix on results videos
+ vid_writer[i] = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
+ vid_writer[i].write(im0)
+
+ # Print time (inference-only)
+ LOGGER.info(f"{s}{'' if len(det) else '(no detections), '}{dt[1].dt * 1E3:.1f}ms")
+
+ # Print results
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {(1, 3, *imgsz)}' % t)
+ if save_txt or save_img:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ if update:
+ strip_optimizer(weights[0]) # update model (to fix SourceChangeWarning)
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s-seg.pt', help='model path(s)')
+ parser.add_argument('--source', type=str, default=ROOT / 'data/images', help='file/dir/URL/glob, 0 for webcam')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='(optional) dataset.yaml path')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=1000, help='maximum detections per image')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--view-img', action='store_true', help='show results')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-crop', action='store_true', help='save cropped prediction boxes')
+ parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
+ parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --classes 0, or --classes 0 2 3')
+ parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--visualize', action='store_true', help='visualize features')
+ parser.add_argument('--update', action='store_true', help='update all models')
+ parser.add_argument('--project', default=ROOT / 'runs/predict-seg', help='save results to project/name')
+ parser.add_argument('--name', default='exp', help='save results to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--line-thickness', default=3, type=int, help='bounding box thickness (pixels)')
+ parser.add_argument('--hide-labels', default=False, action='store_true', help='hide labels')
+ parser.add_argument('--hide-conf', default=False, action='store_true', help='hide confidences')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ #run()
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/seg/segment/train.py b/yolov7_seg/seg/segment/train.py
new file mode 100644
index 000000000..7a46ead0f
--- /dev/null
+++ b/yolov7_seg/seg/segment/train.py
@@ -0,0 +1,681 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Train a YOLOv5 segment model on a segment dataset
+Models and datasets download automatically from the latest YOLOv5 release.
+
+Usage - Single-GPU training:
+ $ python segment/train.py --data coco128-seg.yaml --weights yolov5s-seg.pt --img 640 # from pretrained (recommended)
+ $ python segment/train.py --data coco128-seg.yaml --weights '' --cfg yolov5s-seg.yaml --img 640 # from scratch
+
+Usage - Multi-GPU DDP training:
+ $ python -m torch.distributed.run --nproc_per_node 4 --master_port 1 segment/train.py --data coco128-seg.yaml --weights yolov5s-seg.pt --img 640 --device 0,1,2,3
+
+Models: https://github.com/ultralytics/yolov5/tree/master/models
+Datasets: https://github.com/ultralytics/yolov5/tree/master/data
+Tutorial: https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data
+"""
+
+import argparse
+import math
+import os
+import random
+import sys
+import time
+from copy import deepcopy
+from datetime import datetime
+from pathlib import Path
+
+import numpy as np
+import torch
+import torch.distributed as dist
+import torch.nn as nn
+import yaml
+from torch.optim import lr_scheduler
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+import torch.nn.functional as F
+
+import segment.val as validate # for end-of-epoch mAP
+from models.experimental import attempt_load
+from models.yolo import SegmentationModel
+from utils.autoanchor import check_anchors
+from utils.autobatch import check_train_batch_size
+from utils.callbacks import Callbacks
+from utils.downloads import attempt_download, is_url
+from utils.general import (LOGGER, check_amp, check_dataset, check_file, check_git_status, check_img_size,
+ check_requirements, check_suffix, check_yaml, colorstr, get_latest_run, increment_path,
+ init_seeds, intersect_dicts, labels_to_class_weights, labels_to_image_weights, one_cycle,
+ print_args, print_mutation, strip_optimizer, yaml_save)
+from utils.loggers import GenericLogger
+from utils.plots import plot_evolve, plot_labels
+from utils.segment.dataloaders import create_dataloader
+from utils.segment.loss import ComputeLoss
+from utils.segment.metrics import KEYS, fitness
+from utils.segment.plots import plot_images_and_masks, plot_results_with_masks
+from utils.torch_utils import (EarlyStopping, ModelEMA, de_parallel, select_device, smart_DDP, smart_optimizer,
+ smart_resume, torch_distributed_zero_first)
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+
+def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictionary
+ save_dir, epochs, batch_size, weights, single_cls, evolve, data, cfg, resume, noval, nosave, workers, freeze, mask_ratio = \
+ Path(opt.save_dir), opt.epochs, opt.batch_size, opt.weights, opt.single_cls, opt.evolve, opt.data, opt.cfg, \
+ opt.resume, opt.noval, opt.nosave, opt.workers, opt.freeze, opt.mask_ratio
+ # callbacks.run('on_pretrain_routine_start')
+
+ # Directories
+ w = save_dir / 'weights' # weights dir
+ (w.parent if evolve else w).mkdir(parents=True, exist_ok=True) # make dir
+ last, best = w / 'last.pt', w / 'best.pt'
+
+ # Hyperparameters
+ if isinstance(hyp, str):
+ with open(hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ LOGGER.info(colorstr('hyperparameters: ') + ', '.join(f'{k}={v}' for k, v in hyp.items()))
+ opt.hyp = hyp.copy() # for saving hyps to checkpoints
+
+ # Save run settings
+ if not evolve:
+ yaml_save(save_dir / 'hyp.yaml', hyp)
+ yaml_save(save_dir / 'opt.yaml', vars(opt))
+
+ # Loggers
+ data_dict = None
+ if RANK in {-1, 0}:
+ logger = GenericLogger(opt=opt, console_logger=LOGGER)
+ # loggers = Loggers(save_dir, weights, opt, hyp, LOGGER) # loggers instance
+ # if loggers.clearml:
+ # data_dict = loggers.clearml.data_dict # None if no ClearML dataset or filled in by ClearML
+ # if loggers.wandb:
+ # data_dict = loggers.wandb.data_dict
+ # if resume:
+ # weights, epochs, hyp, batch_size = opt.weights, opt.epochs, opt.hyp, opt.batch_size
+ #
+ # # Register actions
+ # for k in methods(loggers):
+ # callbacks.register_action(k, callback=getattr(loggers, k))
+
+ # Config
+ plots = not evolve and not opt.noplots # create plots
+ overlap = not opt.no_overlap
+ cuda = device.type != 'cpu'
+ init_seeds(opt.seed + 1 + RANK, deterministic=True)
+ with torch_distributed_zero_first(LOCAL_RANK):
+ data_dict = data_dict or check_dataset(data) # check if None
+ train_path, val_path = data_dict['train'], data_dict['val']
+ nc = 1 if single_cls else int(data_dict['nc']) # number of classes
+ names = {0: 'item'} if single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
+ is_coco = isinstance(val_path, str) and val_path.endswith('coco/val2017.txt') # COCO dataset
+
+ # Model
+ check_suffix(weights, '.pt') # check weights
+ pretrained = weights.endswith('.pt')
+ if pretrained:
+ with torch_distributed_zero_first(LOCAL_RANK):
+ weights = attempt_download(weights) # download if not found locally
+ ckpt = torch.load(weights, map_location='cpu') # load checkpoint to CPU to avoid CUDA memory leak
+ model = SegmentationModel(cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device)
+ exclude = ['anchor'] if (cfg or hyp.get('anchors')) and not resume else [] # exclude keys
+ csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
+ csd = intersect_dicts(csd, model.state_dict(), exclude=exclude) # intersect
+ model.load_state_dict(csd, strict=False) # load
+ LOGGER.info(f'Transferred {len(csd)}/{len(model.state_dict())} items from {weights}') # report
+ else:
+ model = SegmentationModel(cfg, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ amp = check_amp(model) # check AMP
+
+ # Freeze
+ freeze = [f'model.{x}.' for x in (freeze if len(freeze) > 1 else range(freeze[0]))] # layers to freeze
+ for k, v in model.named_parameters():
+ v.requires_grad = True # train all layers
+ # v.register_hook(lambda x: torch.nan_to_num(x)) # NaN to 0 (commented for erratic training results)
+ if any(x in k for x in freeze):
+ LOGGER.info(f'freezing {k}')
+ v.requires_grad = False
+
+ # Image size
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ imgsz = check_img_size(opt.imgsz, gs, floor=gs * 2) # verify imgsz is gs-multiple
+
+ # Batch size
+ if RANK == -1 and batch_size == -1: # single-GPU only, estimate best batch size
+ batch_size = check_train_batch_size(model, imgsz, amp)
+ logger.update_params({"batch_size": batch_size})
+ # loggers.on_params_update({"batch_size": batch_size})
+
+ # Optimizer
+ nbs = 64 # nominal batch size
+ accumulate = max(round(nbs / batch_size), 1) # accumulate loss before optimizing
+ hyp['weight_decay'] *= batch_size * accumulate / nbs # scale weight_decay
+ optimizer = smart_optimizer(model, opt.optimizer, hyp['lr0'], hyp['momentum'], hyp['weight_decay'])
+
+ # Scheduler
+ if opt.cos_lr:
+ lf = one_cycle(1, hyp['lrf'], epochs) # cosine 1->hyp['lrf']
+ else:
+ lf = lambda x: (1 - x / epochs) * (1.0 - hyp['lrf']) + hyp['lrf'] # linear
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf) # plot_lr_scheduler(optimizer, scheduler, epochs)
+
+ # EMA
+ ema = ModelEMA(model) if RANK in {-1, 0} else None
+
+ # Resume
+ best_fitness, start_epoch = 0.0, 0
+ if pretrained:
+ if resume:
+ best_fitness, start_epoch, epochs = smart_resume(ckpt, optimizer, ema, weights, epochs, resume)
+ del ckpt, csd
+
+ # DP mode
+ if cuda and RANK == -1 and torch.cuda.device_count() > 1:
+ LOGGER.warning('WARNING: DP not recommended, use torch.distributed.run for best DDP Multi-GPU results.\n'
+ 'See Multi-GPU Tutorial at https://github.com/ultralytics/yolov5/issues/475 to get started.')
+ model = torch.nn.DataParallel(model)
+
+ # SyncBatchNorm
+ if opt.sync_bn and cuda and RANK != -1:
+ model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
+ LOGGER.info('Using SyncBatchNorm()')
+
+ # Trainloader
+ train_loader, dataset = create_dataloader(
+ train_path,
+ imgsz,
+ batch_size // WORLD_SIZE,
+ gs,
+ single_cls,
+ hyp=hyp,
+ augment=True,
+ cache=None if opt.cache == 'val' else opt.cache,
+ rect=opt.rect,
+ rank=LOCAL_RANK,
+ workers=workers,
+ image_weights=opt.image_weights,
+ quad=opt.quad,
+ prefix=colorstr('train: '),
+ shuffle=True,
+ mask_downsample_ratio=mask_ratio,
+ overlap_mask=overlap,
+ )
+ labels = np.concatenate(dataset.labels, 0)
+ mlc = int(labels[:, 0].max()) # max label class
+ assert mlc < nc, f'Label class {mlc} exceeds nc={nc} in {data}. Possible class labels are 0-{nc - 1}'
+
+ # Process 0
+ if RANK in {-1, 0}:
+ val_loader = create_dataloader(val_path,
+ imgsz,
+ batch_size // WORLD_SIZE * 2,
+ gs,
+ single_cls,
+ hyp=hyp,
+ cache=None if noval else opt.cache,
+ rect=True,
+ rank=-1,
+ workers=workers * 2,
+ pad=0.5,
+ mask_downsample_ratio=mask_ratio,
+ overlap_mask=overlap,
+ prefix=colorstr('val: '))[0]
+
+ if not resume:
+ if not opt.noautoanchor:
+ check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz) # run AutoAnchor
+ model.half().float() # pre-reduce anchor precision
+
+ if plots:
+ plot_labels(labels, names, save_dir)
+ # callbacks.run('on_pretrain_routine_end', labels, names)
+
+ # DDP mode
+ if cuda and RANK != -1:
+ model = smart_DDP(model)
+
+ # Model attributes
+ nl = de_parallel(model).model[-1].nl # number of detection layers (to scale hyps)
+ hyp['box'] *= 3 / nl # scale to layers
+ hyp['cls'] *= nc / 80 * 3 / nl # scale to classes and layers
+ hyp['obj'] *= (imgsz / 640) ** 2 * 3 / nl # scale to image size and layers
+ hyp['label_smoothing'] = opt.label_smoothing
+ model.nc = nc # attach number of classes to model
+ model.hyp = hyp # attach hyperparameters to model
+ model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
+ model.names = names
+
+ # Start training
+ t0 = time.time()
+ nb = len(train_loader) # number of batches
+ nw = max(round(hyp['warmup_epochs'] * nb), 100) # number of warmup iterations, max(3 epochs, 100 iterations)
+ # nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
+ last_opt_step = -1
+ maps = np.zeros(nc) # mAP per class
+ results = (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
+ scheduler.last_epoch = start_epoch - 1 # do not move
+ scaler = torch.cuda.amp.GradScaler(enabled=amp)
+ stopper, stop = EarlyStopping(patience=opt.patience), False
+ compute_loss = ComputeLoss(model, overlap=overlap) # init loss class
+ # callbacks.run('on_train_start')
+ LOGGER.info(f'Image sizes {imgsz} train, {imgsz} val\n'
+ f'Using {train_loader.num_workers * WORLD_SIZE} dataloader workers\n'
+ f"Logging results to {colorstr('bold', save_dir)}\n"
+ f'Starting training for {epochs} epochs...')
+ for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
+ # callbacks.run('on_train_epoch_start')
+ model.train()
+
+ # Update image weights (optional, single-GPU only)
+ if opt.image_weights:
+ cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
+ iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
+ dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
+
+ # Update mosaic border (optional)
+ # b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
+ # dataset.mosaic_border = [b - imgsz, -b] # height, width borders
+
+ mloss = torch.zeros(4, device=device) # mean losses
+ if RANK != -1:
+ train_loader.sampler.set_epoch(epoch)
+ pbar = enumerate(train_loader)
+ LOGGER.info(('\n' + '%11s' * 8) %
+ ('Epoch', 'GPU_mem', 'box_loss', 'seg_loss', 'obj_loss', 'cls_loss', 'Instances', 'Size'))
+ if RANK in {-1, 0}:
+ pbar = tqdm(pbar, total=nb, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ optimizer.zero_grad()
+ for i, (imgs, targets, paths, _, masks) in pbar: # batch ------------------------------------------------------
+ # callbacks.run('on_train_batch_start')
+ ni = i + nb * epoch # number integrated batches (since train start)
+ imgs = imgs.to(device, non_blocking=True).float() / 255 # uint8 to float32, 0-255 to 0.0-1.0
+
+ # Warmup
+ if ni <= nw:
+ xi = [0, nw] # x interp
+ # compute_loss.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
+ accumulate = max(1, np.interp(ni, xi, [1, nbs / batch_size]).round())
+ for j, x in enumerate(optimizer.param_groups):
+ # bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
+ x['lr'] = np.interp(ni, xi, [hyp['warmup_bias_lr'] if j == 0 else 0.0, x['initial_lr'] * lf(epoch)])
+ if 'momentum' in x:
+ x['momentum'] = np.interp(ni, xi, [hyp['warmup_momentum'], hyp['momentum']])
+
+ # Multi-scale
+ if opt.multi_scale:
+ sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
+ sf = sz / max(imgs.shape[2:]) # scale factor
+ if sf != 1:
+ ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
+ imgs = nn.functional.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)
+
+ # Forward
+ with torch.cuda.amp.autocast(amp):
+ pred = model(imgs) # forward
+ loss, loss_items = compute_loss(pred, targets.to(device), masks=masks.to(device).float())
+ if RANK != -1:
+ loss *= WORLD_SIZE # gradient averaged between devices in DDP mode
+ if opt.quad:
+ loss *= 4.
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize - https://pytorch.org/docs/master/notes/amp_examples.html
+ if ni - last_opt_step >= accumulate:
+ scaler.unscale_(optimizer) # unscale gradients
+ torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=10.0) # clip gradients
+ scaler.step(optimizer) # optimizer.step
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+ last_opt_step = ni
+
+ # Log
+ if RANK in {-1, 0}:
+ mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
+ mem = f'{torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0:.3g}G' # (GB)
+ pbar.set_description(('%11s' * 2 + '%11.4g' * 6) %
+ (f'{epoch}/{epochs - 1}', mem, *mloss, targets.shape[0], imgs.shape[-1]))
+ # callbacks.run('on_train_batch_end', model, ni, imgs, targets, paths)
+ # if callbacks.stop_training:
+ # return
+
+ # Mosaic plots
+ if mask_ratio != 1:
+ masks = F.interpolate(masks[None].float(), (imgsz, imgsz), mode="bilinear", align_corners=False)[0]
+ if plots:
+ if ni < 3:
+ plot_images_and_masks(imgs, targets, masks, paths, save_dir / f"train_batch{ni}.jpg")
+ if ni == 10:
+ files = sorted(save_dir.glob('train*.jpg'))
+ logger.log_images(files, "Mosaics", epoch)
+ # end batch ------------------------------------------------------------------------------------------------
+
+ # Scheduler
+ lr = [x['lr'] for x in optimizer.param_groups] # for loggers
+ scheduler.step()
+
+ if RANK in {-1, 0}:
+ # mAP
+ # callbacks.run('on_train_epoch_end', epoch=epoch)
+ ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'names', 'stride', 'class_weights'])
+ final_epoch = (epoch + 1 == epochs) or stopper.possible_stop
+ if not noval or final_epoch: # Calculate mAP
+ results, maps, _ = validate.run(data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ half=amp,
+ model=ema.ema,
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ plots=False,
+ callbacks=callbacks,
+ compute_loss=compute_loss,
+ mask_downsample_ratio=mask_ratio,
+ overlap=overlap)
+
+ # Update best mAP
+ fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
+ stop = stopper(epoch=epoch, fitness=fi) # early stop check
+ if fi > best_fitness:
+ best_fitness = fi
+ log_vals = list(mloss) + list(results) + lr
+ # callbacks.run('on_fit_epoch_end', log_vals, epoch, best_fitness, fi)
+ # Log val metrics and media
+ metrics_dict = dict(zip(KEYS, log_vals))
+ logger.log_metrics(metrics_dict, epoch)
+ if plots:
+ files = sorted(save_dir.glob('val*.jpg'))
+ logger.log_images(files, "Validation", epoch)
+
+ # Save model
+ if (not nosave) or (final_epoch and not evolve): # if save
+ ckpt = {
+ 'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'model': deepcopy(de_parallel(model)).half(),
+ 'ema': deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': optimizer.state_dict(),
+ # 'wandb_id': loggers.wandb.wandb_run.id if loggers.wandb else None,
+ 'opt': vars(opt),
+ 'date': datetime.now().isoformat()}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fi:
+ torch.save(ckpt, best)
+ if opt.save_period > 0 and epoch % opt.save_period == 0:
+ torch.save(ckpt, w / f'epoch_{epoch}.pt')
+ logger.log_model(w / f'epoch_{epoch}.pt')
+ del ckpt
+ # callbacks.run('on_model_save', last, epoch, final_epoch, best_fitness, fi)
+
+ # EarlyStopping
+ if RANK != -1: # if DDP training
+ broadcast_list = [stop if RANK == 0 else None]
+ dist.broadcast_object_list(broadcast_list, 0) # broadcast 'stop' to all ranks
+ if RANK != 0:
+ stop = broadcast_list[0]
+ if stop:
+ break # must break all DDP ranks
+
+ # end epoch ----------------------------------------------------------------------------------------------------
+ # end training -----------------------------------------------------------------------------------------------------
+ if RANK in {-1, 0}:
+ LOGGER.info(f'\n{epoch - start_epoch + 1} epochs completed in {(time.time() - t0) / 3600:.3f} hours.')
+ for f in last, best:
+ if f.exists():
+ strip_optimizer(f) # strip optimizers
+ if f is best:
+ LOGGER.info(f'\nValidating {f}...')
+ results, _, _ = validate.run(
+ data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ model=attempt_load(f, device).half(),
+ iou_thres=0.65 if is_coco else 0.60, # best pycocotools at iou 0.65
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ save_json=is_coco,
+ verbose=True,
+ plots=plots,
+ callbacks=callbacks,
+ compute_loss=compute_loss,
+ mask_downsample_ratio=mask_ratio,
+ overlap=overlap) # val best model with plots
+ if is_coco:
+ # callbacks.run('on_fit_epoch_end', list(mloss) + list(results) + lr, epoch, best_fitness, fi)
+ metrics_dict = dict(zip(KEYS, list(mloss) + list(results) + lr))
+ logger.log_metrics(metrics_dict, epoch)
+
+ # callbacks.run('on_train_end', last, best, epoch, results)
+ # on train end callback using genericLogger
+ logger.log_metrics(dict(zip(KEYS[4:16], results)), epochs + 1)
+ if not opt.evolve:
+ logger.log_model(best, epoch + 1)
+ if plots:
+ plot_results_with_masks(file=save_dir / 'results.csv') # save results.png
+ files = ['results.png', 'confusion_matrix.png', *(f'{x}_curve.png' for x in ('F1', 'PR', 'P', 'R'))]
+ files = [(save_dir / f) for f in files if (save_dir / f).exists()] # filter
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}")
+ logger.log_images(files, "Results", epoch + 1)
+
+ torch.cuda.empty_cache()
+ return results
+
+
+def parse_opt(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s-seg.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128-seg.yaml', help='dataset.yaml path')
+ parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch-low.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300, help='total training epochs')
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--noval', action='store_true', help='only validate final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable AutoAnchor')
+ parser.add_argument('--noplots', action='store_true', help='save no plot files')
+ parser.add_argument('--evolve', type=int, nargs='?', const=300, help='evolve hyperparameters for x generations')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--optimizer', type=str, choices=['SGD', 'Adam', 'AdamW'], default='SGD', help='optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default=ROOT / 'runs/train-seg', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--cos-lr', action='store_true', help='cosine LR scheduler')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--patience', type=int, default=100, help='EarlyStopping patience (epochs without improvement)')
+ parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone=10, first3=0 1 2')
+ parser.add_argument('--save-period', type=int, default=-1, help='Save checkpoint every x epochs (disabled if < 1)')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+
+ # Instance Segmentation Args
+ parser.add_argument('--mask-ratio', type=int, default=4, help='Downsample the truth masks to saving memory')
+ parser.add_argument('--no-overlap', action='store_true', help='Overlap masks train faster at slightly less mAP')
+
+ # Weights & Biases arguments
+ # parser.add_argument('--entity', default=None, help='W&B: Entity')
+ # parser.add_argument('--upload_dataset', nargs='?', const=True, default=False, help='W&B: Upload data, "val" option')
+ # parser.add_argument('--bbox_interval', type=int, default=-1, help='W&B: Set bounding-box image logging interval')
+ # parser.add_argument('--artifact_alias', type=str, default='latest', help='W&B: Version of dataset artifact to use')
+
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def main(opt, callbacks=Callbacks()):
+ # Checks
+ if RANK in {-1, 0}:
+ print_args(vars(opt))
+ #check_git_status()
+ #check_requirements()
+
+ # Resume
+ if opt.resume and not opt.evolve: # resume from specified or most recent last.pt
+ last = Path(check_file(opt.resume) if isinstance(opt.resume, str) else get_latest_run())
+ opt_yaml = last.parent.parent / 'opt.yaml' # train options yaml
+ opt_data = opt.data # original dataset
+ if opt_yaml.is_file():
+ with open(opt_yaml, errors='ignore') as f:
+ d = yaml.safe_load(f)
+ else:
+ d = torch.load(last, map_location='cpu')['opt']
+ opt = argparse.Namespace(**d) # replace
+ opt.cfg, opt.weights, opt.resume = '', str(last), True # reinstate
+ if is_url(opt_data):
+ opt.data = check_file(opt_data) # avoid HUB resume auth timeout
+ else:
+ opt.data, opt.cfg, opt.hyp, opt.weights, opt.project = \
+ check_file(opt.data), check_yaml(opt.cfg), check_yaml(opt.hyp), str(opt.weights), str(opt.project) # checks
+ assert len(opt.cfg) or len(opt.weights), 'either --cfg or --weights must be specified'
+ if opt.evolve:
+ if opt.project == str(ROOT / 'runs/train'): # if default project name, rename to runs/evolve
+ opt.project = str(ROOT / 'runs/evolve')
+ opt.exist_ok, opt.resume = opt.resume, False # pass resume to exist_ok and disable resume
+ if opt.name == 'cfg':
+ opt.name = Path(opt.cfg).stem # use model.yaml as name
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok))
+
+ # DDP mode
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if LOCAL_RANK != -1:
+ msg = 'is not compatible with YOLOv5 Multi-GPU DDP training'
+ assert not opt.image_weights, f'--image-weights {msg}'
+ assert not opt.evolve, f'--evolve {msg}'
+ assert opt.batch_size != -1, f'AutoBatch with --batch-size -1 {msg}, please pass a valid --batch-size'
+ assert opt.batch_size % WORLD_SIZE == 0, f'--batch-size {opt.batch_size} must be multiple of WORLD_SIZE'
+ assert torch.cuda.device_count() > LOCAL_RANK, 'insufficient CUDA devices for DDP command'
+ torch.cuda.set_device(LOCAL_RANK)
+ device = torch.device('cuda', LOCAL_RANK)
+ dist.init_process_group(backend="nccl" if dist.is_nccl_available() else "gloo")
+
+ # Train
+ if not opt.evolve:
+ train(opt.hyp, opt, device, callbacks)
+
+ # Evolve hyperparameters (optional)
+ else:
+ # Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)
+ meta = {
+ 'lr0': (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
+ 'lrf': (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
+ 'momentum': (0.3, 0.6, 0.98), # SGD momentum/Adam beta1
+ 'weight_decay': (1, 0.0, 0.001), # optimizer weight decay
+ 'warmup_epochs': (1, 0.0, 5.0), # warmup epochs (fractions ok)
+ 'warmup_momentum': (1, 0.0, 0.95), # warmup initial momentum
+ 'warmup_bias_lr': (1, 0.0, 0.2), # warmup initial bias lr
+ 'box': (1, 0.02, 0.2), # box loss gain
+ 'cls': (1, 0.2, 4.0), # cls loss gain
+ 'cls_pw': (1, 0.5, 2.0), # cls BCELoss positive_weight
+ 'obj': (1, 0.2, 4.0), # obj loss gain (scale with pixels)
+ 'obj_pw': (1, 0.5, 2.0), # obj BCELoss positive_weight
+ 'iou_t': (0, 0.1, 0.7), # IoU training threshold
+ 'anchor_t': (1, 2.0, 8.0), # anchor-multiple threshold
+ 'anchors': (2, 2.0, 10.0), # anchors per output grid (0 to ignore)
+ 'fl_gamma': (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
+ 'hsv_h': (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
+ 'hsv_s': (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
+ 'hsv_v': (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)
+ 'degrees': (1, 0.0, 45.0), # image rotation (+/- deg)
+ 'translate': (1, 0.0, 0.9), # image translation (+/- fraction)
+ 'scale': (1, 0.0, 0.9), # image scale (+/- gain)
+ 'shear': (1, 0.0, 10.0), # image shear (+/- deg)
+ 'perspective': (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
+ 'flipud': (1, 0.0, 1.0), # image flip up-down (probability)
+ 'fliplr': (0, 0.0, 1.0), # image flip left-right (probability)
+ 'mosaic': (1, 0.0, 1.0), # image mixup (probability)
+ 'mixup': (1, 0.0, 1.0), # image mixup (probability)
+ 'copy_paste': (1, 0.0, 1.0)} # segment copy-paste (probability)
+
+ with open(opt.hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ if 'anchors' not in hyp: # anchors commented in hyp.yaml
+ hyp['anchors'] = 3
+ if opt.noautoanchor:
+ del hyp['anchors'], meta['anchors']
+ opt.noval, opt.nosave, save_dir = True, True, Path(opt.save_dir) # only val/save final epoch
+ # ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
+ evolve_yaml, evolve_csv = save_dir / 'hyp_evolve.yaml', save_dir / 'evolve.csv'
+ if opt.bucket:
+ os.system(f'gsutil cp gs://{opt.bucket}/evolve.csv {evolve_csv}') # download evolve.csv if exists
+
+ for _ in range(opt.evolve): # generations to evolve
+ if evolve_csv.exists(): # if evolve.csv exists: select best hyps and mutate
+ # Select parent(s)
+ parent = 'single' # parent selection method: 'single' or 'weighted'
+ x = np.loadtxt(evolve_csv, ndmin=2, delimiter=',', skiprows=1)
+ n = min(5, len(x)) # number of previous results to consider
+ x = x[np.argsort(-fitness(x))][:n] # top n mutations
+ w = fitness(x) - fitness(x).min() + 1E-6 # weights (sum > 0)
+ if parent == 'single' or len(x) == 1:
+ # x = x[random.randint(0, n - 1)] # random selection
+ x = x[random.choices(range(n), weights=w)[0]] # weighted selection
+ elif parent == 'weighted':
+ x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
+
+ # Mutate
+ mp, s = 0.8, 0.2 # mutation probability, sigma
+ npr = np.random
+ npr.seed(int(time.time()))
+ g = np.array([meta[k][0] for k in hyp.keys()]) # gains 0-1
+ ng = len(meta)
+ v = np.ones(ng)
+ while all(v == 1): # mutate until a change occurs (prevent duplicates)
+ v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
+ for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
+ hyp[k] = float(x[i + 7] * v[i]) # mutate
+
+ # Constrain to limits
+ for k, v in meta.items():
+ hyp[k] = max(hyp[k], v[1]) # lower limit
+ hyp[k] = min(hyp[k], v[2]) # upper limit
+ hyp[k] = round(hyp[k], 5) # significant digits
+
+ # Train mutation
+ results = train(hyp.copy(), opt, device, callbacks)
+ callbacks = Callbacks()
+ # Write mutation results
+ print_mutation(results, hyp.copy(), save_dir, opt.bucket)
+
+ # Plot results
+ plot_evolve(evolve_csv)
+ LOGGER.info(f'Hyperparameter evolution finished {opt.evolve} generations\n'
+ f"Results saved to {colorstr('bold', save_dir)}\n"
+ f'Usage example: $ python train.py --hyp {evolve_yaml}')
+
+
+def run(**kwargs):
+ # Usage: import train; train.run(data='coco128.yaml', imgsz=320, weights='yolov5m.pt')
+ opt = parse_opt(True)
+ for k, v in kwargs.items():
+ setattr(opt, k, v)
+ main(opt)
+ return opt
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/seg/segment/val.py b/yolov7_seg/seg/segment/val.py
new file mode 100644
index 000000000..f2b9139d7
--- /dev/null
+++ b/yolov7_seg/seg/segment/val.py
@@ -0,0 +1,471 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a trained YOLOv5 segment model on a segment dataset
+
+Usage:
+ $ bash data/scripts/get_coco.sh --val --segments # download COCO-segments val split (1G, 5000 images)
+ $ python segment/val.py --weights yolov5s-seg.pt --data coco.yaml --img 640- # validate COCO-segments
+
+Usage - formats:
+ $ python segment/val.py --weights yolov5s-seg.pt # PyTorch
+ yolov5s-seg.torchscript # TorchScript
+ yolov5s-seg.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s-seg.xml # OpenVINO
+ yolov5s-seg.engine # TensorRT
+ yolov5s-seg.mlmodel # CoreML (macOS-only)
+ yolov5s-seg_saved_model # TensorFlow SavedModel
+ yolov5s-seg.pb # TensorFlow GraphDef
+ yolov5s-seg.tflite # TensorFlow Lite
+ yolov5s-seg_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import json
+import os
+import sys
+from multiprocessing.pool import ThreadPool
+from pathlib import Path
+
+import numpy as np
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+import torch.nn.functional as F
+
+from models.common import DetectMultiBackend
+from models.yolo import SegmentationModel
+from utils.callbacks import Callbacks
+from utils.general import (LOGGER, NUM_THREADS, Profile, check_dataset, check_img_size, check_requirements, check_yaml,
+ coco80_to_coco91_class, colorstr, increment_path, non_max_suppression, print_args,
+ scale_coords, xywh2xyxy, xyxy2xywh)
+from utils.metrics import ConfusionMatrix, box_iou
+from utils.plots import output_to_target, plot_val_study
+from utils.segment.dataloaders import create_dataloader
+from utils.segment.general import mask_iou, process_mask, process_mask_upsample, scale_masks
+from utils.segment.metrics import Metrics, ap_per_class_box_and_mask
+from utils.segment.plots import plot_images_and_masks
+from utils.torch_utils import de_parallel, select_device, smart_inference_mode
+
+
+def save_one_txt(predn, save_conf, shape, file):
+ # Save one txt result
+ gn = torch.tensor(shape)[[1, 0, 1, 0]] # normalization gain whwh
+ for *xyxy, conf, cls in predn.tolist():
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(file, 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+
+def save_one_json(predn, jdict, path, class_map, pred_masks):
+ # Save one JSON result {"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}
+ from pycocotools.mask import encode
+
+ def single_encode(x):
+ rle = encode(np.asarray(x[:, :, None], order="F", dtype="uint8"))[0]
+ rle["counts"] = rle["counts"].decode("utf-8")
+ return rle
+
+ image_id = int(path.stem) if path.stem.isnumeric() else path.stem
+ box = xyxy2xywh(predn[:, :4]) # xywh
+ box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
+ pred_masks = np.transpose(pred_masks, (2, 0, 1))
+ with ThreadPool(NUM_THREADS) as pool:
+ rles = pool.map(single_encode, pred_masks)
+ for i, (p, b) in enumerate(zip(predn.tolist(), box.tolist())):
+ jdict.append({
+ 'image_id': image_id,
+ 'category_id': class_map[int(p[5])],
+ 'bbox': [round(x, 3) for x in b],
+ 'score': round(p[4], 5),
+ 'segmentation': rles[i]})
+
+
+def process_batch(detections, labels, iouv, pred_masks=None, gt_masks=None, overlap=False, masks=False):
+ """
+ Return correct prediction matrix
+ Arguments:
+ detections (array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ correct (array[N, 10]), for 10 IoU levels
+ """
+ if masks:
+ if overlap:
+ nl = len(labels)
+ index = torch.arange(nl, device=gt_masks.device).view(nl, 1, 1) + 1
+ gt_masks = gt_masks.repeat(nl, 1, 1) # shape(1,640,640) -> (n,640,640)
+ gt_masks = torch.where(gt_masks == index, 1.0, 0.0)
+ if gt_masks.shape[1:] != pred_masks.shape[1:]:
+ gt_masks = F.interpolate(gt_masks[None], pred_masks.shape[1:], mode="bilinear", align_corners=False)[0]
+ gt_masks = gt_masks.gt_(0.5)
+ iou = mask_iou(gt_masks.view(gt_masks.shape[0], -1), pred_masks.view(pred_masks.shape[0], -1))
+ else: # boxes
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+
+ correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
+ correct_class = labels[:, 0:1] == detections[:, 5]
+ for i in range(len(iouv)):
+ x = torch.where((iou >= iouv[i]) & correct_class) # IoU > threshold and classes match
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detect, iou]
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ # matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ correct[matches[:, 1].astype(int), i] = True
+ return torch.tensor(correct, dtype=torch.bool, device=iouv.device)
+
+
+@smart_inference_mode()
+def run(
+ data,
+ weights=None, # model.pt path(s)
+ batch_size=32, # batch size
+ imgsz=640, # inference size (pixels)
+ conf_thres=0.001, # confidence threshold
+ iou_thres=0.6, # NMS IoU threshold
+ max_det=300, # maximum detections per image
+ task='val', # train, val, test, speed or study
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ workers=8, # max dataloader workers (per RANK in DDP mode)
+ single_cls=False, # treat as single-class dataset
+ augment=False, # augmented inference
+ verbose=False, # verbose output
+ save_txt=False, # save results to *.txt
+ save_hybrid=False, # save label+prediction hybrid results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_json=False, # save a COCO-JSON results file
+ project=ROOT / 'runs/val-seg', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=True, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ model=None,
+ dataloader=None,
+ save_dir=Path(''),
+ plots=True,
+ overlap=False,
+ mask_downsample_ratio=1,
+ compute_loss=None,
+ callbacks=Callbacks(),
+):
+ if save_json:
+ check_requirements(['pycocotools'])
+ process = process_mask_upsample # more accurate
+ else:
+ process = process_mask # faster
+
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ model.half() if half else model.float()
+ nm = de_parallel(model).model[-1].nm # number of masks
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ nm = de_parallel(model).model.model[-1].nm if isinstance(model, SegmentationModel) else 32 # number of masks
+ if engine:
+ batch_size = model.batch_size
+ else:
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
+
+ # Data
+ data = check_dataset(data) # check
+
+ # Configure
+ model.eval()
+ cuda = device.type != 'cpu'
+ is_coco = isinstance(data.get('val'), str) and data['val'].endswith(f'coco{os.sep}val2017.txt') # COCO dataset
+ nc = 1 if single_cls else int(data['nc']) # number of classes
+ iouv = torch.linspace(0.5, 0.95, 10, device=device) # iou vector for mAP@0.5:0.95
+ niou = iouv.numel()
+
+ # Dataloader
+ if not training:
+ if pt and not single_cls: # check --weights are trained on --data
+ ncm = model.model.nc
+ assert ncm == nc, f'{weights} ({ncm} classes) trained on different --data than what you passed ({nc} ' \
+ f'classes). Pass correct combination of --weights and --data that are trained together.'
+ model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
+ pad = 0.0 if task in ('speed', 'benchmark') else 0.5
+ rect = False if task == 'benchmark' else pt # square inference for benchmarks
+ task = task if task in ('train', 'val', 'test') else 'val' # path to train/val/test images
+ dataloader = create_dataloader(data[task],
+ imgsz,
+ batch_size,
+ stride,
+ single_cls,
+ pad=pad,
+ rect=rect,
+ workers=workers,
+ prefix=colorstr(f'{task}: '),
+ overlap_mask=overlap,
+ mask_downsample_ratio=mask_downsample_ratio)[0]
+
+ seen = 0
+ confusion_matrix = ConfusionMatrix(nc=nc)
+ names = model.names if hasattr(model, 'names') else model.module.names # get class names
+ if isinstance(names, (list, tuple)): # old format
+ names = dict(enumerate(names))
+ class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
+ s = ('%22s' + '%11s' * 10) % ('Class', 'Images', 'Instances', 'Box(P', "R", "mAP50", "mAP50-95)", "Mask(P", "R",
+ "mAP50", "mAP50-95)")
+ dt = Profile(), Profile(), Profile()
+ metrics = Metrics()
+ loss = torch.zeros(4, device=device)
+ jdict, stats = [], []
+ # callbacks.run('on_val_start')
+ pbar = tqdm(dataloader, desc=s, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ for batch_i, (im, targets, paths, shapes, masks) in enumerate(pbar):
+ # callbacks.run('on_val_batch_start')
+ with dt[0]:
+ if cuda:
+ im = im.to(device, non_blocking=True)
+ targets = targets.to(device)
+ masks = masks.to(device)
+ masks = masks.float()
+ im = im.half() if half else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ nb, _, height, width = im.shape # batch size, channels, height, width
+
+ # Inference
+ with dt[1]:
+ out, train_out = model(im) # if training else model(im, augment=augment, val=True) # inference, loss
+
+ # Loss
+ if compute_loss:
+ loss += compute_loss(train_out, targets, masks)[1] # box, obj, cls
+
+ # NMS
+ targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
+ lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
+ with dt[2]:
+ out = non_max_suppression(out,
+ conf_thres,
+ iou_thres,
+ labels=lb,
+ multi_label=True,
+ agnostic=single_cls,
+ max_det=max_det,
+ nm=nm)
+
+ # Metrics
+ plot_masks = [] # masks for plotting
+ for si, pred in enumerate(out):
+ labels = targets[targets[:, 0] == si, 1:]
+ nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
+ path, shape = Path(paths[si]), shapes[si][0]
+ correct_masks = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
+ correct_bboxes = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
+ seen += 1
+
+ if npr == 0:
+ if nl:
+ stats.append((correct_masks, correct_bboxes, *torch.zeros((2, 0), device=device), labels[:, 0]))
+ if plots:
+ confusion_matrix.process_batch(detections=None, labels=labels[:, 0])
+ continue
+
+ # Masks
+ midx = [si] if overlap else targets[:, 0] == si
+ gt_masks = masks[midx]
+ proto_out = train_out[1][si]
+ pred_masks = process(proto_out, pred[:, 6:], pred[:, :4], shape=im[si].shape[1:])
+
+ # Predictions
+ if single_cls:
+ pred[:, 5] = 0
+ predn = pred.clone()
+ scale_coords(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
+
+ # Evaluate
+ if nl:
+ tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
+ scale_coords(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
+ labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
+ correct_bboxes = process_batch(predn, labelsn, iouv)
+ correct_masks = process_batch(predn, labelsn, iouv, pred_masks, gt_masks, overlap=overlap, masks=True)
+ if plots:
+ confusion_matrix.process_batch(predn, labelsn)
+ stats.append((correct_masks, correct_bboxes, pred[:, 4], pred[:, 5], labels[:, 0])) # (conf, pcls, tcls)
+
+ pred_masks = torch.as_tensor(pred_masks, dtype=torch.uint8)
+ if plots and batch_i < 3:
+ plot_masks.append(pred_masks[:15].cpu()) # filter top 15 to plot
+
+ # Save/log
+ if save_txt:
+ save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / f'{path.stem}.txt')
+ if save_json:
+ pred_masks = scale_masks(im[si].shape[1:],
+ pred_masks.permute(1, 2, 0).contiguous().cpu().numpy(), shape, shapes[si][1])
+ save_one_json(predn, jdict, path, class_map, pred_masks) # append to COCO-JSON dictionary
+ # callbacks.run('on_val_image_end', pred, predn, path, names, im[si])
+
+ # Plot images
+ if plots and batch_i < 3:
+ if len(plot_masks):
+ plot_masks = torch.cat(plot_masks, dim=0)
+ plot_images_and_masks(im, targets, masks, paths, save_dir / f'val_batch{batch_i}_labels.jpg', names)
+ plot_images_and_masks(im, output_to_target(out, max_det=15), plot_masks, paths,
+ save_dir / f'val_batch{batch_i}_pred.jpg', names) # pred
+
+ # callbacks.run('on_val_batch_end')
+
+ # Compute metrics
+ stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
+ if len(stats) and stats[0].any():
+ results = ap_per_class_box_and_mask(*stats, plot=plots, save_dir=save_dir, names=names)
+ metrics.update(results)
+ nt = np.bincount(stats[4].astype(int), minlength=nc) # number of targets per class
+
+ # Print results
+ pf = '%22s' + '%11i' * 2 + '%11.3g' * 8 # print format
+ LOGGER.info(pf % ("all", seen, nt.sum(), *metrics.mean_results()))
+ if nt.sum() == 0:
+ LOGGER.warning(f'WARNING: no labels found in {task} set, can not compute metrics without labels ⚠️')
+
+ # Print results per class
+ if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
+ for i, c in enumerate(metrics.ap_class_index):
+ LOGGER.info(pf % (names[c], seen, nt[c], *metrics.class_result(i)))
+
+ # Print speeds
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
+ if not training:
+ shape = (batch_size, 3, imgsz, imgsz)
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}' % t)
+
+ # Plots
+ if plots:
+ confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
+ # callbacks.run('on_val_end')
+
+ mp_bbox, mr_bbox, map50_bbox, map_bbox, mp_mask, mr_mask, map50_mask, map_mask = metrics.mean_results()
+
+ # Save JSON
+ if save_json and len(jdict):
+ w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
+ anno_json = str(Path(data.get('path', '../coco')) / 'annotations/instances_val2017.json') # annotations json
+ pred_json = str(save_dir / f"{w}_predictions.json") # predictions json
+ LOGGER.info(f'\nEvaluating pycocotools mAP... saving {pred_json}...')
+ with open(pred_json, 'w') as f:
+ json.dump(jdict, f)
+
+ try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
+ from pycocotools.coco import COCO
+ from pycocotools.cocoeval import COCOeval
+
+ anno = COCO(anno_json) # init annotations api
+ pred = anno.loadRes(pred_json) # init predictions api
+ results = []
+ for eval in COCOeval(anno, pred, 'bbox'), COCOeval(anno, pred, 'segm'):
+ if is_coco:
+ eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.im_files] # img ID to evaluate
+ eval.evaluate()
+ eval.accumulate()
+ eval.summarize()
+ results.extend(eval.stats[:2]) # update results (mAP@0.5:0.95, mAP@0.5)
+ map_bbox, map50_bbox, map_mask, map50_mask = results
+ except Exception as e:
+ LOGGER.info(f'pycocotools unable to run: {e}')
+
+ # Return results
+ model.float() # for training
+ if not training:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ final_metric = mp_bbox, mr_bbox, map50_bbox, map_bbox, mp_mask, mr_mask, map50_mask, map_mask
+ return (*final_metric, *(loss.cpu() / len(dataloader)).tolist()), metrics.get_maps(nc), t
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128-seg.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s-seg.pt', help='model path(s)')
+ parser.add_argument('--batch-size', type=int, default=32, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=300, help='maximum detections per image')
+ parser.add_argument('--task', default='val', help='train, val, test, speed or study')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--verbose', action='store_true', help='report mAP by class')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-json', action='store_true', help='save a COCO-JSON results file')
+ parser.add_argument('--project', default=ROOT / 'runs/val-seg', help='save results to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.data = check_yaml(opt.data) # check YAML
+ # opt.save_json |= opt.data.endswith('coco.yaml')
+ opt.save_txt |= opt.save_hybrid
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ #check_requirements(requirements=ROOT / 'requirements.txt', exclude=('tensorboard', 'thop'))
+
+ if opt.task in ('train', 'val', 'test'): # run normally
+ if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
+ LOGGER.info(f'WARNING: confidence threshold {opt.conf_thres} > 0.001 produces invalid results ⚠️')
+ if opt.save_hybrid:
+ LOGGER.info('WARNING: --save-hybrid will return high mAP from hybrid labels, not from predictions alone ⚠️')
+ run(**vars(opt))
+
+ else:
+ weights = opt.weights if isinstance(opt.weights, list) else [opt.weights]
+ opt.half = True # FP16 for fastest results
+ if opt.task == 'speed': # speed benchmarks
+ # python val.py --task speed --data coco.yaml --batch 1 --weights yolov5n.pt yolov5s.pt...
+ opt.conf_thres, opt.iou_thres, opt.save_json = 0.25, 0.45, False
+ for opt.weights in weights:
+ run(**vars(opt), plots=False)
+
+ elif opt.task == 'study': # speed vs mAP benchmarks
+ # python val.py --task study --data coco.yaml --iou 0.7 --weights yolov5n.pt yolov5s.pt...
+ for opt.weights in weights:
+ f = f'study_{Path(opt.data).stem}_{Path(opt.weights).stem}.txt' # filename to save to
+ x, y = list(range(256, 1536 + 128, 128)), [] # x axis (image sizes), y axis
+ for opt.imgsz in x: # img-size
+ LOGGER.info(f'\nRunning {f} --imgsz {opt.imgsz}...')
+ r, _, t = run(**vars(opt), plots=False)
+ y.append(r + t) # results and times
+ np.savetxt(f, y, fmt='%10.4g') # save
+ os.system('zip -r study.zip study_*.txt')
+ plot_val_study(x=x) # plot
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/seg/setup.cfg b/yolov7_seg/seg/setup.cfg
new file mode 100644
index 000000000..b6b2e1840
--- /dev/null
+++ b/yolov7_seg/seg/setup.cfg
@@ -0,0 +1,59 @@
+# Project-wide configuration file, can be used for package metadata and other toll configurations
+# Example usage: global configuration for PEP8 (via flake8) setting or default pytest arguments
+# Local usage: pip install pre-commit, pre-commit run --all-files
+
+[metadata]
+license_file = LICENSE
+description_file = README.md
+
+
+[tool:pytest]
+norecursedirs =
+ .git
+ dist
+ build
+addopts =
+ --doctest-modules
+ --durations=25
+ --color=yes
+
+
+[flake8]
+max-line-length = 120
+exclude = .tox,*.egg,build,temp
+select = E,W,F
+doctests = True
+verbose = 2
+# https://pep8.readthedocs.io/en/latest/intro.html#error-codes
+format = pylint
+# see: https://www.flake8rules.com/
+ignore =
+ E731 # Do not assign a lambda expression, use a def
+ F405 # name may be undefined, or defined from star imports: module
+ E402 # module level import not at top of file
+ F401 # module imported but unused
+ W504 # line break after binary operator
+ E127 # continuation line over-indented for visual indent
+ W504 # line break after binary operator
+ E231 # missing whitespace after ‘,’, ‘;’, or ‘:’
+ E501 # line too long
+ F403 # ‘from module import *’ used; unable to detect undefined names
+
+
+[isort]
+# https://pycqa.github.io/isort/docs/configuration/options.html
+line_length = 120
+# see: https://pycqa.github.io/isort/docs/configuration/multi_line_output_modes.html
+multi_line_output = 0
+
+
+[yapf]
+based_on_style = pep8
+spaces_before_comment = 2
+COLUMN_LIMIT = 120
+COALESCE_BRACKETS = True
+SPACES_AROUND_POWER_OPERATOR = True
+SPACE_BETWEEN_ENDING_COMMA_AND_CLOSING_BRACKET = False
+SPLIT_BEFORE_CLOSING_BRACKET = False
+SPLIT_BEFORE_FIRST_ARGUMENT = False
+# EACH_DICT_ENTRY_ON_SEPARATE_LINE = False
diff --git a/yolov7_seg/seg/train.py b/yolov7_seg/seg/train.py
new file mode 100644
index 000000000..773f1f2c2
--- /dev/null
+++ b/yolov7_seg/seg/train.py
@@ -0,0 +1,630 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Train a YOLOv5 model on a custom dataset.
+Models and datasets download automatically from the latest YOLOv5 release.
+
+Usage - Single-GPU training:
+ $ python train.py --data coco128.yaml --weights yolov5s.pt --img 640 # from pretrained (recommended)
+ $ python train.py --data coco128.yaml --weights '' --cfg yolov5s.yaml --img 640 # from scratch
+
+Usage - Multi-GPU DDP training:
+ $ python -m torch.distributed.run --nproc_per_node 4 --master_port 1 train.py --data coco128.yaml --weights yolov5s.pt --img 640 --device 0,1,2,3
+
+Models: https://github.com/ultralytics/yolov5/tree/master/models
+Datasets: https://github.com/ultralytics/yolov5/tree/master/data
+Tutorial: https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data
+"""
+
+import argparse
+import math
+import os
+import random
+import sys
+import time
+from copy import deepcopy
+from datetime import datetime
+from pathlib import Path
+
+import numpy as np
+import torch
+import torch.distributed as dist
+import torch.nn as nn
+import yaml
+from torch.optim import lr_scheduler
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+import val as validate # for end-of-epoch mAP
+from models.experimental import attempt_load
+from models.yolo import Model
+from utils.autoanchor import check_anchors
+from utils.autobatch import check_train_batch_size
+from utils.callbacks import Callbacks
+from utils.dataloaders import create_dataloader
+from utils.downloads import attempt_download, is_url
+from utils.general import (LOGGER, check_amp, check_dataset, check_file, check_git_status, check_img_size,
+ check_requirements, check_suffix, check_yaml, colorstr, get_latest_run, increment_path,
+ init_seeds, intersect_dicts, labels_to_class_weights, labels_to_image_weights, methods,
+ one_cycle, print_args, print_mutation, strip_optimizer, yaml_save)
+from utils.loggers import Loggers
+from utils.loggers.wandb.wandb_utils import check_wandb_resume
+from utils.loss import ComputeLoss
+from utils.metrics import fitness
+from utils.plots import plot_evolve
+from utils.torch_utils import (EarlyStopping, ModelEMA, de_parallel, select_device, smart_DDP, smart_optimizer,
+ smart_resume, torch_distributed_zero_first)
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+
+def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictionary
+ save_dir, epochs, batch_size, weights, single_cls, evolve, data, cfg, resume, noval, nosave, workers, freeze = \
+ Path(opt.save_dir), opt.epochs, opt.batch_size, opt.weights, opt.single_cls, opt.evolve, opt.data, opt.cfg, \
+ opt.resume, opt.noval, opt.nosave, opt.workers, opt.freeze
+ callbacks.run('on_pretrain_routine_start')
+
+ # Directories
+ w = save_dir / 'weights' # weights dir
+ (w.parent if evolve else w).mkdir(parents=True, exist_ok=True) # make dir
+ last, best = w / 'last.pt', w / 'best.pt'
+
+ # Hyperparameters
+ if isinstance(hyp, str):
+ with open(hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ LOGGER.info(colorstr('hyperparameters: ') + ', '.join(f'{k}={v}' for k, v in hyp.items()))
+ opt.hyp = hyp.copy() # for saving hyps to checkpoints
+
+ # Save run settings
+ if not evolve:
+ yaml_save(save_dir / 'hyp.yaml', hyp)
+ yaml_save(save_dir / 'opt.yaml', vars(opt))
+
+ # Loggers
+ data_dict = None
+ if RANK in {-1, 0}:
+ loggers = Loggers(save_dir, weights, opt, hyp, LOGGER) # loggers instance
+ if loggers.clearml:
+ data_dict = loggers.clearml.data_dict # None if no ClearML dataset or filled in by ClearML
+ if loggers.wandb:
+ data_dict = loggers.wandb.data_dict
+ if resume:
+ weights, epochs, hyp, batch_size = opt.weights, opt.epochs, opt.hyp, opt.batch_size
+
+ # Register actions
+ for k in methods(loggers):
+ callbacks.register_action(k, callback=getattr(loggers, k))
+
+ # Config
+ plots = not evolve and not opt.noplots # create plots
+ cuda = device.type != 'cpu'
+ init_seeds(opt.seed + 1 + RANK, deterministic=True)
+ with torch_distributed_zero_first(LOCAL_RANK):
+ data_dict = data_dict or check_dataset(data) # check if None
+ train_path, val_path = data_dict['train'], data_dict['val']
+ nc = 1 if single_cls else int(data_dict['nc']) # number of classes
+ names = {0: 'item'} if single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
+ is_coco = isinstance(val_path, str) and val_path.endswith('coco/val2017.txt') # COCO dataset
+
+ # Model
+ check_suffix(weights, '.pt') # check weights
+ pretrained = weights.endswith('.pt')
+ if pretrained:
+ with torch_distributed_zero_first(LOCAL_RANK):
+ weights = attempt_download(weights) # download if not found locally
+ ckpt = torch.load(weights, map_location='cpu') # load checkpoint to CPU to avoid CUDA memory leak
+ model = Model(cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ exclude = ['anchor'] if (cfg or hyp.get('anchors')) and not resume else [] # exclude keys
+ csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
+ csd = intersect_dicts(csd, model.state_dict(), exclude=exclude) # intersect
+ model.load_state_dict(csd, strict=False) # load
+ LOGGER.info(f'Transferred {len(csd)}/{len(model.state_dict())} items from {weights}') # report
+ else:
+ model = Model(cfg, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
+ amp = check_amp(model) # check AMP
+
+ # Freeze
+ freeze = [f'model.{x}.' for x in (freeze if len(freeze) > 1 else range(freeze[0]))] # layers to freeze
+ for k, v in model.named_parameters():
+ v.requires_grad = True # train all layers
+ # v.register_hook(lambda x: torch.nan_to_num(x)) # NaN to 0 (commented for erratic training results)
+ if any(x in k for x in freeze):
+ LOGGER.info(f'freezing {k}')
+ v.requires_grad = False
+
+ # Image size
+ gs = max(int(model.stride.max()), 32) # grid size (max stride)
+ imgsz = check_img_size(opt.imgsz, gs, floor=gs * 2) # verify imgsz is gs-multiple
+
+ # Batch size
+ if RANK == -1 and batch_size == -1: # single-GPU only, estimate best batch size
+ batch_size = check_train_batch_size(model, imgsz, amp)
+ loggers.on_params_update({"batch_size": batch_size})
+
+ # Optimizer
+ nbs = 64 # nominal batch size
+ accumulate = max(round(nbs / batch_size), 1) # accumulate loss before optimizing
+ hyp['weight_decay'] *= batch_size * accumulate / nbs # scale weight_decay
+ optimizer = smart_optimizer(model, opt.optimizer, hyp['lr0'], hyp['momentum'], hyp['weight_decay'])
+
+ # Scheduler
+ if opt.cos_lr:
+ lf = one_cycle(1, hyp['lrf'], epochs) # cosine 1->hyp['lrf']
+ else:
+ lf = lambda x: (1 - x / epochs) * (1.0 - hyp['lrf']) + hyp['lrf'] # linear
+ scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf) # plot_lr_scheduler(optimizer, scheduler, epochs)
+
+ # EMA
+ ema = ModelEMA(model) if RANK in {-1, 0} else None
+
+ # Resume
+ best_fitness, start_epoch = 0.0, 0
+ if pretrained:
+ if resume:
+ best_fitness, start_epoch, epochs = smart_resume(ckpt, optimizer, ema, weights, epochs, resume)
+ del ckpt, csd
+
+ # DP mode
+ if cuda and RANK == -1 and torch.cuda.device_count() > 1:
+ LOGGER.warning('WARNING: DP not recommended, use torch.distributed.run for best DDP Multi-GPU results.\n'
+ 'See Multi-GPU Tutorial at https://github.com/ultralytics/yolov5/issues/475 to get started.')
+ model = torch.nn.DataParallel(model)
+
+ # SyncBatchNorm
+ if opt.sync_bn and cuda and RANK != -1:
+ model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
+ LOGGER.info('Using SyncBatchNorm()')
+
+ # Trainloader
+ train_loader, dataset = create_dataloader(train_path,
+ imgsz,
+ batch_size // WORLD_SIZE,
+ gs,
+ single_cls,
+ hyp=hyp,
+ augment=True,
+ cache=None if opt.cache == 'val' else opt.cache,
+ rect=opt.rect,
+ rank=LOCAL_RANK,
+ workers=workers,
+ image_weights=opt.image_weights,
+ quad=opt.quad,
+ prefix=colorstr('train: '),
+ shuffle=True)
+ labels = np.concatenate(dataset.labels, 0)
+ mlc = int(labels[:, 0].max()) # max label class
+ assert mlc < nc, f'Label class {mlc} exceeds nc={nc} in {data}. Possible class labels are 0-{nc - 1}'
+
+ # Process 0
+ if RANK in {-1, 0}:
+ val_loader = create_dataloader(val_path,
+ imgsz,
+ batch_size // WORLD_SIZE * 2,
+ gs,
+ single_cls,
+ hyp=hyp,
+ cache=None if noval else opt.cache,
+ rect=True,
+ rank=-1,
+ workers=workers * 2,
+ pad=0.5,
+ prefix=colorstr('val: '))[0]
+
+ if not resume:
+ if not opt.noautoanchor:
+ check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz) # run AutoAnchor
+ model.half().float() # pre-reduce anchor precision
+
+ callbacks.run('on_pretrain_routine_end', labels, names)
+
+ # DDP mode
+ if cuda and RANK != -1:
+ model = smart_DDP(model)
+
+ # Model attributes
+ nl = de_parallel(model).model[-1].nl # number of detection layers (to scale hyps)
+ hyp['box'] *= 3 / nl # scale to layers
+ hyp['cls'] *= nc / 80 * 3 / nl # scale to classes and layers
+ hyp['obj'] *= (imgsz / 640) ** 2 * 3 / nl # scale to image size and layers
+ hyp['label_smoothing'] = opt.label_smoothing
+ model.nc = nc # attach number of classes to model
+ model.hyp = hyp # attach hyperparameters to model
+ model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
+ model.names = names
+
+ # Start training
+ t0 = time.time()
+ nb = len(train_loader) # number of batches
+ nw = max(round(hyp['warmup_epochs'] * nb), 100) # number of warmup iterations, max(3 epochs, 100 iterations)
+ # nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
+ last_opt_step = -1
+ maps = np.zeros(nc) # mAP per class
+ results = (0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
+ scheduler.last_epoch = start_epoch - 1 # do not move
+ scaler = torch.cuda.amp.GradScaler(enabled=amp)
+ stopper, stop = EarlyStopping(patience=opt.patience), False
+ compute_loss = ComputeLoss(model) # init loss class
+ callbacks.run('on_train_start')
+ LOGGER.info(f'Image sizes {imgsz} train, {imgsz} val\n'
+ f'Using {train_loader.num_workers * WORLD_SIZE} dataloader workers\n'
+ f"Logging results to {colorstr('bold', save_dir)}\n"
+ f'Starting training for {epochs} epochs...')
+ for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
+ callbacks.run('on_train_epoch_start')
+ model.train()
+
+ # Update image weights (optional, single-GPU only)
+ if opt.image_weights:
+ cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
+ iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
+ dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
+
+ # Update mosaic border (optional)
+ # b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
+ # dataset.mosaic_border = [b - imgsz, -b] # height, width borders
+
+ mloss = torch.zeros(3, device=device) # mean losses
+ if RANK != -1:
+ train_loader.sampler.set_epoch(epoch)
+ pbar = enumerate(train_loader)
+ LOGGER.info(('\n' + '%11s' * 7) % ('Epoch', 'GPU_mem', 'box_loss', 'obj_loss', 'cls_loss', 'Instances', 'Size'))
+ if RANK in {-1, 0}:
+ pbar = tqdm(pbar, total=nb, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ optimizer.zero_grad()
+ for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
+ callbacks.run('on_train_batch_start')
+ ni = i + nb * epoch # number integrated batches (since train start)
+ imgs = imgs.to(device, non_blocking=True).float() / 255 # uint8 to float32, 0-255 to 0.0-1.0
+
+ # Warmup
+ if ni <= nw:
+ xi = [0, nw] # x interp
+ # compute_loss.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
+ accumulate = max(1, np.interp(ni, xi, [1, nbs / batch_size]).round())
+ for j, x in enumerate(optimizer.param_groups):
+ # bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
+ x['lr'] = np.interp(ni, xi, [hyp['warmup_bias_lr'] if j == 0 else 0.0, x['initial_lr'] * lf(epoch)])
+ if 'momentum' in x:
+ x['momentum'] = np.interp(ni, xi, [hyp['warmup_momentum'], hyp['momentum']])
+
+ # Multi-scale
+ if opt.multi_scale:
+ sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
+ sf = sz / max(imgs.shape[2:]) # scale factor
+ if sf != 1:
+ ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
+ imgs = nn.functional.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)
+
+ # Forward
+ with torch.cuda.amp.autocast(amp):
+ pred = model(imgs) # forward
+ loss, loss_items = compute_loss(pred, targets.to(device)) # loss scaled by batch_size
+ if RANK != -1:
+ loss *= WORLD_SIZE # gradient averaged between devices in DDP mode
+ if opt.quad:
+ loss *= 4.
+
+ # Backward
+ scaler.scale(loss).backward()
+
+ # Optimize - https://pytorch.org/docs/master/notes/amp_examples.html
+ if ni - last_opt_step >= accumulate:
+ scaler.unscale_(optimizer) # unscale gradients
+ torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=10.0) # clip gradients
+ scaler.step(optimizer) # optimizer.step
+ scaler.update()
+ optimizer.zero_grad()
+ if ema:
+ ema.update(model)
+ last_opt_step = ni
+
+ # Log
+ if RANK in {-1, 0}:
+ mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
+ mem = f'{torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0:.3g}G' # (GB)
+ pbar.set_description(('%11s' * 2 + '%11.4g' * 5) %
+ (f'{epoch}/{epochs - 1}', mem, *mloss, targets.shape[0], imgs.shape[-1]))
+ callbacks.run('on_train_batch_end', model, ni, imgs, targets, paths)
+ if callbacks.stop_training:
+ return
+ # end batch ------------------------------------------------------------------------------------------------
+
+ # Scheduler
+ lr = [x['lr'] for x in optimizer.param_groups] # for loggers
+ scheduler.step()
+
+ if RANK in {-1, 0}:
+ # mAP
+ callbacks.run('on_train_epoch_end', epoch=epoch)
+ ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'names', 'stride', 'class_weights'])
+ final_epoch = (epoch + 1 == epochs) or stopper.possible_stop
+ if not noval or final_epoch: # Calculate mAP
+ results, maps, _ = validate.run(data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ half=amp,
+ model=ema.ema,
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ plots=False,
+ callbacks=callbacks,
+ compute_loss=compute_loss)
+
+ # Update best mAP
+ fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
+ stop = stopper(epoch=epoch, fitness=fi) # early stop check
+ if fi > best_fitness:
+ best_fitness = fi
+ log_vals = list(mloss) + list(results) + lr
+ callbacks.run('on_fit_epoch_end', log_vals, epoch, best_fitness, fi)
+
+ # Save model
+ if (not nosave) or (final_epoch and not evolve): # if save
+ ckpt = {
+ 'epoch': epoch,
+ 'best_fitness': best_fitness,
+ 'model': deepcopy(de_parallel(model)).half(),
+ 'ema': deepcopy(ema.ema).half(),
+ 'updates': ema.updates,
+ 'optimizer': optimizer.state_dict(),
+ 'wandb_id': loggers.wandb.wandb_run.id if loggers.wandb else None,
+ 'opt': vars(opt),
+ 'date': datetime.now().isoformat()}
+
+ # Save last, best and delete
+ torch.save(ckpt, last)
+ if best_fitness == fi:
+ torch.save(ckpt, best)
+ if opt.save_period > 0 and epoch % opt.save_period == 0:
+ torch.save(ckpt, w / f'epoch{epoch}.pt')
+ del ckpt
+ callbacks.run('on_model_save', last, epoch, final_epoch, best_fitness, fi)
+
+ # EarlyStopping
+ if RANK != -1: # if DDP training
+ broadcast_list = [stop if RANK == 0 else None]
+ dist.broadcast_object_list(broadcast_list, 0) # broadcast 'stop' to all ranks
+ if RANK != 0:
+ stop = broadcast_list[0]
+ if stop:
+ break # must break all DDP ranks
+
+ # end epoch ----------------------------------------------------------------------------------------------------
+ # end training -----------------------------------------------------------------------------------------------------
+ if RANK in {-1, 0}:
+ LOGGER.info(f'\n{epoch - start_epoch + 1} epochs completed in {(time.time() - t0) / 3600:.3f} hours.')
+ for f in last, best:
+ if f.exists():
+ strip_optimizer(f) # strip optimizers
+ if f is best:
+ LOGGER.info(f'\nValidating {f}...')
+ results, _, _ = validate.run(
+ data_dict,
+ batch_size=batch_size // WORLD_SIZE * 2,
+ imgsz=imgsz,
+ model=attempt_load(f, device).half(),
+ iou_thres=0.65 if is_coco else 0.60, # best pycocotools at iou 0.65
+ single_cls=single_cls,
+ dataloader=val_loader,
+ save_dir=save_dir,
+ save_json=is_coco,
+ verbose=True,
+ plots=plots,
+ callbacks=callbacks,
+ compute_loss=compute_loss) # val best model with plots
+ if is_coco:
+ callbacks.run('on_fit_epoch_end', list(mloss) + list(results) + lr, epoch, best_fitness, fi)
+
+ callbacks.run('on_train_end', last, best, epoch, results)
+
+ torch.cuda.empty_cache()
+ return results
+
+
+def parse_opt(known=False):
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='initial weights path')
+ parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch-low.yaml', help='hyperparameters path')
+ parser.add_argument('--epochs', type=int, default=300, help='total training epochs')
+ parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
+ parser.add_argument('--rect', action='store_true', help='rectangular training')
+ parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
+ parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
+ parser.add_argument('--noval', action='store_true', help='only validate final epoch')
+ parser.add_argument('--noautoanchor', action='store_true', help='disable AutoAnchor')
+ parser.add_argument('--noplots', action='store_true', help='save no plot files')
+ parser.add_argument('--evolve', type=int, nargs='?', const=300, help='evolve hyperparameters for x generations')
+ parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
+ parser.add_argument('--cache', type=str, nargs='?', const='ram', help='--cache images in "ram" (default) or "disk"')
+ parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
+ parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
+ parser.add_argument('--optimizer', type=str, choices=['SGD', 'Adam', 'AdamW'], default='SGD', help='optimizer')
+ parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--project', default=ROOT / 'runs/train', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
+ parser.add_argument('--cos-lr', action='store_true', help='cosine LR scheduler')
+ parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
+ parser.add_argument('--patience', type=int, default=100, help='EarlyStopping patience (epochs without improvement)')
+ parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone=10, first3=0 1 2')
+ parser.add_argument('--save-period', type=int, default=-1, help='Save checkpoint every x epochs (disabled if < 1)')
+ parser.add_argument('--seed', type=int, default=0, help='Global training seed')
+ parser.add_argument('--local_rank', type=int, default=-1, help='Automatic DDP Multi-GPU argument, do not modify')
+
+ # Weights & Biases arguments
+ parser.add_argument('--entity', default=None, help='W&B: Entity')
+ parser.add_argument('--upload_dataset', nargs='?', const=True, default=False, help='W&B: Upload data, "val" option')
+ parser.add_argument('--bbox_interval', type=int, default=-1, help='W&B: Set bounding-box image logging interval')
+ parser.add_argument('--artifact_alias', type=str, default='latest', help='W&B: Version of dataset artifact to use')
+
+ return parser.parse_known_args()[0] if known else parser.parse_args()
+
+
+def main(opt, callbacks=Callbacks()):
+ # Checks
+ if RANK in {-1, 0}:
+ print_args(vars(opt))
+ #check_git_status()
+ #check_requirements()
+
+ # Resume
+ if opt.resume and not (check_wandb_resume(opt) or opt.evolve): # resume from specified or most recent last.pt
+ last = Path(check_file(opt.resume) if isinstance(opt.resume, str) else get_latest_run())
+ opt_yaml = last.parent.parent / 'opt.yaml' # train options yaml
+ opt_data = opt.data # original dataset
+ if opt_yaml.is_file():
+ with open(opt_yaml, errors='ignore') as f:
+ d = yaml.safe_load(f)
+ else:
+ d = torch.load(last, map_location='cpu')['opt']
+ opt = argparse.Namespace(**d) # replace
+ opt.cfg, opt.weights, opt.resume = '', str(last), True # reinstate
+ if is_url(opt_data):
+ opt.data = check_file(opt_data) # avoid HUB resume auth timeout
+ else:
+ opt.data, opt.cfg, opt.hyp, opt.weights, opt.project = \
+ check_file(opt.data), check_yaml(opt.cfg), check_yaml(opt.hyp), str(opt.weights), str(opt.project) # checks
+ assert len(opt.cfg) or len(opt.weights), 'either --cfg or --weights must be specified'
+ if opt.evolve:
+ if opt.project == str(ROOT / 'runs/train'): # if default project name, rename to runs/evolve
+ opt.project = str(ROOT / 'runs/evolve')
+ opt.exist_ok, opt.resume = opt.resume, False # pass resume to exist_ok and disable resume
+ if opt.name == 'cfg':
+ opt.name = Path(opt.cfg).stem # use model.yaml as name
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok))
+
+ # DDP mode
+ device = select_device(opt.device, batch_size=opt.batch_size)
+ if LOCAL_RANK != -1:
+ msg = 'is not compatible with YOLOv5 Multi-GPU DDP training'
+ assert not opt.image_weights, f'--image-weights {msg}'
+ assert not opt.evolve, f'--evolve {msg}'
+ assert opt.batch_size != -1, f'AutoBatch with --batch-size -1 {msg}, please pass a valid --batch-size'
+ assert opt.batch_size % WORLD_SIZE == 0, f'--batch-size {opt.batch_size} must be multiple of WORLD_SIZE'
+ assert torch.cuda.device_count() > LOCAL_RANK, 'insufficient CUDA devices for DDP command'
+ torch.cuda.set_device(LOCAL_RANK)
+ device = torch.device('cuda', LOCAL_RANK)
+ dist.init_process_group(backend="nccl" if dist.is_nccl_available() else "gloo")
+
+ # Train
+ if not opt.evolve:
+ train(opt.hyp, opt, device, callbacks)
+
+ # Evolve hyperparameters (optional)
+ else:
+ # Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)
+ meta = {
+ 'lr0': (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
+ 'lrf': (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
+ 'momentum': (0.3, 0.6, 0.98), # SGD momentum/Adam beta1
+ 'weight_decay': (1, 0.0, 0.001), # optimizer weight decay
+ 'warmup_epochs': (1, 0.0, 5.0), # warmup epochs (fractions ok)
+ 'warmup_momentum': (1, 0.0, 0.95), # warmup initial momentum
+ 'warmup_bias_lr': (1, 0.0, 0.2), # warmup initial bias lr
+ 'box': (1, 0.02, 0.2), # box loss gain
+ 'cls': (1, 0.2, 4.0), # cls loss gain
+ 'cls_pw': (1, 0.5, 2.0), # cls BCELoss positive_weight
+ 'obj': (1, 0.2, 4.0), # obj loss gain (scale with pixels)
+ 'obj_pw': (1, 0.5, 2.0), # obj BCELoss positive_weight
+ 'iou_t': (0, 0.1, 0.7), # IoU training threshold
+ 'anchor_t': (1, 2.0, 8.0), # anchor-multiple threshold
+ 'anchors': (2, 2.0, 10.0), # anchors per output grid (0 to ignore)
+ 'fl_gamma': (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
+ 'hsv_h': (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
+ 'hsv_s': (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
+ 'hsv_v': (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)
+ 'degrees': (1, 0.0, 45.0), # image rotation (+/- deg)
+ 'translate': (1, 0.0, 0.9), # image translation (+/- fraction)
+ 'scale': (1, 0.0, 0.9), # image scale (+/- gain)
+ 'shear': (1, 0.0, 10.0), # image shear (+/- deg)
+ 'perspective': (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
+ 'flipud': (1, 0.0, 1.0), # image flip up-down (probability)
+ 'fliplr': (0, 0.0, 1.0), # image flip left-right (probability)
+ 'mosaic': (1, 0.0, 1.0), # image mixup (probability)
+ 'mixup': (1, 0.0, 1.0), # image mixup (probability)
+ 'copy_paste': (1, 0.0, 1.0)} # segment copy-paste (probability)
+
+ with open(opt.hyp, errors='ignore') as f:
+ hyp = yaml.safe_load(f) # load hyps dict
+ if 'anchors' not in hyp: # anchors commented in hyp.yaml
+ hyp['anchors'] = 3
+ if opt.noautoanchor:
+ del hyp['anchors'], meta['anchors']
+ opt.noval, opt.nosave, save_dir = True, True, Path(opt.save_dir) # only val/save final epoch
+ # ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
+ evolve_yaml, evolve_csv = save_dir / 'hyp_evolve.yaml', save_dir / 'evolve.csv'
+ if opt.bucket:
+ os.system(f'gsutil cp gs://{opt.bucket}/evolve.csv {evolve_csv}') # download evolve.csv if exists
+
+ for _ in range(opt.evolve): # generations to evolve
+ if evolve_csv.exists(): # if evolve.csv exists: select best hyps and mutate
+ # Select parent(s)
+ parent = 'single' # parent selection method: 'single' or 'weighted'
+ x = np.loadtxt(evolve_csv, ndmin=2, delimiter=',', skiprows=1)
+ n = min(5, len(x)) # number of previous results to consider
+ x = x[np.argsort(-fitness(x))][:n] # top n mutations
+ w = fitness(x) - fitness(x).min() + 1E-6 # weights (sum > 0)
+ if parent == 'single' or len(x) == 1:
+ # x = x[random.randint(0, n - 1)] # random selection
+ x = x[random.choices(range(n), weights=w)[0]] # weighted selection
+ elif parent == 'weighted':
+ x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
+
+ # Mutate
+ mp, s = 0.8, 0.2 # mutation probability, sigma
+ npr = np.random
+ npr.seed(int(time.time()))
+ g = np.array([meta[k][0] for k in hyp.keys()]) # gains 0-1
+ ng = len(meta)
+ v = np.ones(ng)
+ while all(v == 1): # mutate until a change occurs (prevent duplicates)
+ v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
+ for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
+ hyp[k] = float(x[i + 7] * v[i]) # mutate
+
+ # Constrain to limits
+ for k, v in meta.items():
+ hyp[k] = max(hyp[k], v[1]) # lower limit
+ hyp[k] = min(hyp[k], v[2]) # upper limit
+ hyp[k] = round(hyp[k], 5) # significant digits
+
+ # Train mutation
+ results = train(hyp.copy(), opt, device, callbacks)
+ callbacks = Callbacks()
+ # Write mutation results
+ print_mutation(results, hyp.copy(), save_dir, opt.bucket)
+
+ # Plot results
+ plot_evolve(evolve_csv)
+ LOGGER.info(f'Hyperparameter evolution finished {opt.evolve} generations\n'
+ f"Results saved to {colorstr('bold', save_dir)}\n"
+ f'Usage example: $ python train.py --hyp {evolve_yaml}')
+
+
+def run(**kwargs):
+ # Usage: import train; train.run(data='coco128.yaml', imgsz=320, weights='yolov5m.pt')
+ opt = parse_opt(True)
+ for k, v in kwargs.items():
+ setattr(opt, k, v)
+ main(opt)
+ return opt
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/seg/utils/__init__.py b/yolov7_seg/seg/utils/__init__.py
new file mode 100644
index 000000000..7466a486c
--- /dev/null
+++ b/yolov7_seg/seg/utils/__init__.py
@@ -0,0 +1,63 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+utils/initialization
+"""
+
+import contextlib
+import threading
+
+
+class TryExcept(contextlib.ContextDecorator):
+ # YOLOv5 TryExcept class. Usage: @TryExcept() decorator or 'with TryExcept():' context manager
+ def __init__(self, msg='default message here'):
+ self.msg = msg
+
+ def __enter__(self):
+ pass
+
+ def __exit__(self, exc_type, value, traceback):
+ if value:
+ print(f'{self.msg}: {value}')
+ return True
+
+
+def threaded(func):
+ # Multi-threads a target function and returns thread. Usage: @threaded decorator
+ def wrapper(*args, **kwargs):
+ thread = threading.Thread(target=func, args=args, kwargs=kwargs, daemon=True)
+ thread.start()
+ return thread
+
+ return wrapper
+
+
+def notebook_init(verbose=True):
+ # Check system software and hardware
+ print('Checking setup...')
+
+ import os
+ import shutil
+
+ from utils.general import check_requirements, emojis, is_colab
+ from utils.torch_utils import select_device # imports
+
+ check_requirements(('psutil', 'IPython'))
+ import psutil
+ from IPython import display # to display images and clear console output
+
+ if is_colab():
+ shutil.rmtree('/content/sample_data', ignore_errors=True) # remove colab /sample_data directory
+
+ # System info
+ if verbose:
+ gb = 1 << 30 # bytes to GiB (1024 ** 3)
+ ram = psutil.virtual_memory().total
+ total, used, free = shutil.disk_usage("/")
+ display.clear_output()
+ s = f'({os.cpu_count()} CPUs, {ram / gb:.1f} GB RAM, {(total - free) / gb:.1f}/{total / gb:.1f} GB disk)'
+ else:
+ s = ''
+
+ select_device(newline=False)
+ print(emojis(f'Setup complete ✅ {s}'))
+ return display
diff --git a/yolov7_seg/seg/utils/__pycache__/__init__.cpython-310.pyc b/yolov7_seg/seg/utils/__pycache__/__init__.cpython-310.pyc
new file mode 100644
index 000000000..72245318f
Binary files /dev/null and b/yolov7_seg/seg/utils/__pycache__/__init__.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/utils/__pycache__/augmentations.cpython-310.pyc b/yolov7_seg/seg/utils/__pycache__/augmentations.cpython-310.pyc
new file mode 100644
index 000000000..4590f1e45
Binary files /dev/null and b/yolov7_seg/seg/utils/__pycache__/augmentations.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/utils/__pycache__/autoanchor.cpython-310.pyc b/yolov7_seg/seg/utils/__pycache__/autoanchor.cpython-310.pyc
new file mode 100644
index 000000000..94ce765f9
Binary files /dev/null and b/yolov7_seg/seg/utils/__pycache__/autoanchor.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/utils/__pycache__/dataloaders.cpython-310.pyc b/yolov7_seg/seg/utils/__pycache__/dataloaders.cpython-310.pyc
new file mode 100644
index 000000000..997c4c42b
Binary files /dev/null and b/yolov7_seg/seg/utils/__pycache__/dataloaders.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/utils/__pycache__/downloads.cpython-310.pyc b/yolov7_seg/seg/utils/__pycache__/downloads.cpython-310.pyc
new file mode 100644
index 000000000..4e8c98825
Binary files /dev/null and b/yolov7_seg/seg/utils/__pycache__/downloads.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/utils/__pycache__/general.cpython-310.pyc b/yolov7_seg/seg/utils/__pycache__/general.cpython-310.pyc
new file mode 100644
index 000000000..3a7ef2bf3
Binary files /dev/null and b/yolov7_seg/seg/utils/__pycache__/general.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/utils/__pycache__/metrics.cpython-310.pyc b/yolov7_seg/seg/utils/__pycache__/metrics.cpython-310.pyc
new file mode 100644
index 000000000..81ccad4ad
Binary files /dev/null and b/yolov7_seg/seg/utils/__pycache__/metrics.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/utils/__pycache__/plots.cpython-310.pyc b/yolov7_seg/seg/utils/__pycache__/plots.cpython-310.pyc
new file mode 100644
index 000000000..64cb7b339
Binary files /dev/null and b/yolov7_seg/seg/utils/__pycache__/plots.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/utils/__pycache__/torch_utils.cpython-310.pyc b/yolov7_seg/seg/utils/__pycache__/torch_utils.cpython-310.pyc
new file mode 100644
index 000000000..579759866
Binary files /dev/null and b/yolov7_seg/seg/utils/__pycache__/torch_utils.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/utils/activations.py b/yolov7_seg/seg/utils/activations.py
new file mode 100644
index 000000000..03d394e11
--- /dev/null
+++ b/yolov7_seg/seg/utils/activations.py
@@ -0,0 +1,103 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Activation functions
+"""
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+
+class SiLU(nn.Module):
+ # SiLU activation https://arxiv.org/pdf/1606.08415.pdf
+ @staticmethod
+ def forward(x):
+ return x * torch.sigmoid(x)
+
+
+class Hardswish(nn.Module):
+ # Hard-SiLU activation
+ @staticmethod
+ def forward(x):
+ # return x * F.hardsigmoid(x) # for TorchScript and CoreML
+ return x * F.hardtanh(x + 3, 0.0, 6.0) / 6.0 # for TorchScript, CoreML and ONNX
+
+
+class Mish(nn.Module):
+ # Mish activation https://github.com/digantamisra98/Mish
+ @staticmethod
+ def forward(x):
+ return x * F.softplus(x).tanh()
+
+
+class MemoryEfficientMish(nn.Module):
+ # Mish activation memory-efficient
+ class F(torch.autograd.Function):
+
+ @staticmethod
+ def forward(ctx, x):
+ ctx.save_for_backward(x)
+ return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))
+
+ @staticmethod
+ def backward(ctx, grad_output):
+ x = ctx.saved_tensors[0]
+ sx = torch.sigmoid(x)
+ fx = F.softplus(x).tanh()
+ return grad_output * (fx + x * sx * (1 - fx * fx))
+
+ def forward(self, x):
+ return self.F.apply(x)
+
+
+class FReLU(nn.Module):
+ # FReLU activation https://arxiv.org/abs/2007.11824
+ def __init__(self, c1, k=3): # ch_in, kernel
+ super().__init__()
+ self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
+ self.bn = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ return torch.max(x, self.bn(self.conv(x)))
+
+
+class AconC(nn.Module):
+ r""" ACON activation (activate or not)
+ AconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is a learnable parameter
+ according to "Activate or Not: Learning Customized Activation" .
+ """
+
+ def __init__(self, c1):
+ super().__init__()
+ self.p1 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.p2 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.beta = nn.Parameter(torch.ones(1, c1, 1, 1))
+
+ def forward(self, x):
+ dpx = (self.p1 - self.p2) * x
+ return dpx * torch.sigmoid(self.beta * dpx) + self.p2 * x
+
+
+class MetaAconC(nn.Module):
+ r""" ACON activation (activate or not)
+ MetaAconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is generated by a small network
+ according to "Activate or Not: Learning Customized Activation" .
+ """
+
+ def __init__(self, c1, k=1, s=1, r=16): # ch_in, kernel, stride, r
+ super().__init__()
+ c2 = max(r, c1 // r)
+ self.p1 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.p2 = nn.Parameter(torch.randn(1, c1, 1, 1))
+ self.fc1 = nn.Conv2d(c1, c2, k, s, bias=True)
+ self.fc2 = nn.Conv2d(c2, c1, k, s, bias=True)
+ # self.bn1 = nn.BatchNorm2d(c2)
+ # self.bn2 = nn.BatchNorm2d(c1)
+
+ def forward(self, x):
+ y = x.mean(dim=2, keepdims=True).mean(dim=3, keepdims=True)
+ # batch-size 1 bug/instabilities https://github.com/ultralytics/yolov5/issues/2891
+ # beta = torch.sigmoid(self.bn2(self.fc2(self.bn1(self.fc1(y))))) # bug/unstable
+ beta = torch.sigmoid(self.fc2(self.fc1(y))) # bug patch BN layers removed
+ dpx = (self.p1 - self.p2) * x
+ return dpx * torch.sigmoid(beta * dpx) + self.p2 * x
diff --git a/yolov7_seg/seg/utils/augmentations.py b/yolov7_seg/seg/utils/augmentations.py
new file mode 100644
index 000000000..253b4bb8c
--- /dev/null
+++ b/yolov7_seg/seg/utils/augmentations.py
@@ -0,0 +1,348 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Image augmentation functions
+"""
+
+import math
+import random
+
+import cv2
+import numpy as np
+import torchvision.transforms as T
+import torchvision.transforms.functional as TF
+
+from utils.general import LOGGER, check_version, colorstr, resample_segments, segment2box
+from utils.metrics import bbox_ioa
+
+IMAGENET_MEAN = 0.485, 0.456, 0.406 # RGB mean
+IMAGENET_STD = 0.229, 0.224, 0.225 # RGB standard deviation
+
+
+class Albumentations:
+ # YOLOv5 Albumentations class (optional, only used if package is installed)
+ def __init__(self):
+ self.transform = None
+ prefix = colorstr('albumentations: ')
+ try:
+ import albumentations as A
+ check_version(A.__version__, '1.0.3', hard=True) # version requirement
+
+ T = [
+ A.Blur(p=0.01),
+ A.MedianBlur(p=0.01),
+ A.ToGray(p=0.01),
+ A.CLAHE(p=0.01),
+ A.RandomBrightnessContrast(p=0.0),
+ A.RandomGamma(p=0.0),
+ A.ImageCompression(quality_lower=75, p=0.0)] # transforms
+ self.transform = A.Compose(T, bbox_params=A.BboxParams(format='yolo', label_fields=['class_labels']))
+
+ LOGGER.info(prefix + ', '.join(f'{x}'.replace('always_apply=False, ', '') for x in T if x.p))
+ except ImportError: # package not installed, skip
+ pass
+ except Exception as e:
+ LOGGER.info(f'{prefix}{e}')
+
+ def __call__(self, im, labels, p=1.0):
+ if self.transform and random.random() < p:
+ new = self.transform(image=im, bboxes=labels[:, 1:], class_labels=labels[:, 0]) # transformed
+ im, labels = new['image'], np.array([[c, *b] for c, b in zip(new['class_labels'], new['bboxes'])])
+ return im, labels
+
+
+def normalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD, inplace=False):
+ # Denormalize RGB images x per ImageNet stats in BCHW format, i.e. = (x - mean) / std
+ return TF.normalize(x, mean, std, inplace=inplace)
+
+
+def denormalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD):
+ # Denormalize RGB images x per ImageNet stats in BCHW format, i.e. = x * std + mean
+ for i in range(3):
+ x[:, i] = x[:, i] * std[i] + mean[i]
+ return x
+
+
+def augment_hsv(im, hgain=0.5, sgain=0.5, vgain=0.5):
+ # HSV color-space augmentation
+ if hgain or sgain or vgain:
+ r = np.random.uniform(-1, 1, 3) * [hgain, sgain, vgain] + 1 # random gains
+ hue, sat, val = cv2.split(cv2.cvtColor(im, cv2.COLOR_BGR2HSV))
+ dtype = im.dtype # uint8
+
+ x = np.arange(0, 256, dtype=r.dtype)
+ lut_hue = ((x * r[0]) % 180).astype(dtype)
+ lut_sat = np.clip(x * r[1], 0, 255).astype(dtype)
+ lut_val = np.clip(x * r[2], 0, 255).astype(dtype)
+
+ im_hsv = cv2.merge((cv2.LUT(hue, lut_hue), cv2.LUT(sat, lut_sat), cv2.LUT(val, lut_val)))
+ cv2.cvtColor(im_hsv, cv2.COLOR_HSV2BGR, dst=im) # no return needed
+
+
+def hist_equalize(im, clahe=True, bgr=False):
+ # Equalize histogram on BGR image 'im' with im.shape(n,m,3) and range 0-255
+ yuv = cv2.cvtColor(im, cv2.COLOR_BGR2YUV if bgr else cv2.COLOR_RGB2YUV)
+ if clahe:
+ c = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
+ yuv[:, :, 0] = c.apply(yuv[:, :, 0])
+ else:
+ yuv[:, :, 0] = cv2.equalizeHist(yuv[:, :, 0]) # equalize Y channel histogram
+ return cv2.cvtColor(yuv, cv2.COLOR_YUV2BGR if bgr else cv2.COLOR_YUV2RGB) # convert YUV image to RGB
+
+
+def replicate(im, labels):
+ # Replicate labels
+ h, w = im.shape[:2]
+ boxes = labels[:, 1:].astype(int)
+ x1, y1, x2, y2 = boxes.T
+ s = ((x2 - x1) + (y2 - y1)) / 2 # side length (pixels)
+ for i in s.argsort()[:round(s.size * 0.5)]: # smallest indices
+ x1b, y1b, x2b, y2b = boxes[i]
+ bh, bw = y2b - y1b, x2b - x1b
+ yc, xc = int(random.uniform(0, h - bh)), int(random.uniform(0, w - bw)) # offset x, y
+ x1a, y1a, x2a, y2a = [xc, yc, xc + bw, yc + bh]
+ im[y1a:y2a, x1a:x2a] = im[y1b:y2b, x1b:x2b] # im4[ymin:ymax, xmin:xmax]
+ labels = np.append(labels, [[labels[i, 0], x1a, y1a, x2a, y2a]], axis=0)
+
+ return im, labels
+
+
+def letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
+ # Resize and pad image while meeting stride-multiple constraints
+ shape = im.shape[:2] # current shape [height, width]
+ if isinstance(new_shape, int):
+ new_shape = (new_shape, new_shape)
+
+ # Scale ratio (new / old)
+ r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
+ if not scaleup: # only scale down, do not scale up (for better val mAP)
+ r = min(r, 1.0)
+
+ # Compute padding
+ ratio = r, r # width, height ratios
+ new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
+ dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
+ if auto: # minimum rectangle
+ dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
+ elif scaleFill: # stretch
+ dw, dh = 0.0, 0.0
+ new_unpad = (new_shape[1], new_shape[0])
+ ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
+
+ dw /= 2 # divide padding into 2 sides
+ dh /= 2
+
+ if shape[::-1] != new_unpad: # resize
+ im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
+ top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
+ left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
+ im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
+ return im, ratio, (dw, dh)
+
+
+def random_perspective(im,
+ targets=(),
+ segments=(),
+ degrees=10,
+ translate=.1,
+ scale=.1,
+ shear=10,
+ perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(0.1, 0.1), scale=(0.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = im.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = im.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
+ T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(im[:, :, ::-1]) # base
+ # ax[1].imshow(im2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ if n:
+ use_segments = any(x.any() for x in segments)
+ new = np.zeros((n, 4))
+ if use_segments: # warp segments
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+
+ else: # warp boxes
+ xy = np.ones((n * 4, 3))
+ xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
+
+ # create new boxes
+ x = xy[:, [0, 2, 4, 6]]
+ y = xy[:, [1, 3, 5, 7]]
+ new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
+
+ # clip
+ new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
+ new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+
+ return im, targets
+
+
+def copy_paste(im, labels, segments, p=0.5):
+ # Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
+ n = len(segments)
+ if p and n:
+ h, w, c = im.shape # height, width, channels
+ im_new = np.zeros(im.shape, np.uint8)
+ for j in random.sample(range(n), k=round(p * n)):
+ l, s = labels[j], segments[j]
+ box = w - l[3], l[2], w - l[1], l[4]
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
+ labels = np.concatenate((labels, [[l[0], *box]]), 0)
+ segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
+ cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
+
+ result = cv2.bitwise_and(src1=im, src2=im_new)
+ result = cv2.flip(result, 1) # augment segments (flip left-right)
+ i = result > 0 # pixels to replace
+ # i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
+ im[i] = result[i] # cv2.imwrite('debug.jpg', im) # debug
+
+ return im, labels, segments
+
+
+def cutout(im, labels, p=0.5):
+ # Applies image cutout augmentation https://arxiv.org/abs/1708.04552
+ if random.random() < p:
+ h, w = im.shape[:2]
+ scales = [0.5] * 1 + [0.25] * 2 + [0.125] * 4 + [0.0625] * 8 + [0.03125] * 16 # image size fraction
+ for s in scales:
+ mask_h = random.randint(1, int(h * s)) # create random masks
+ mask_w = random.randint(1, int(w * s))
+
+ # box
+ xmin = max(0, random.randint(0, w) - mask_w // 2)
+ ymin = max(0, random.randint(0, h) - mask_h // 2)
+ xmax = min(w, xmin + mask_w)
+ ymax = min(h, ymin + mask_h)
+
+ # apply random color mask
+ im[ymin:ymax, xmin:xmax] = [random.randint(64, 191) for _ in range(3)]
+
+ # return unobscured labels
+ if len(labels) and s > 0.03:
+ box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
+ ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
+ labels = labels[ioa < 0.60] # remove >60% obscured labels
+
+ return labels
+
+
+def mixup(im, labels, im2, labels2):
+ # Applies MixUp augmentation https://arxiv.org/pdf/1710.09412.pdf
+ r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
+ im = (im * r + im2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+ return im, labels
+
+
+def box_candidates(box1, box2, wh_thr=2, ar_thr=100, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
+ # Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
+ w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
+ w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
+ ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
+ return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
+
+
+def classify_albumentations(augment=True,
+ size=224,
+ scale=(0.08, 1.0),
+ hflip=0.5,
+ vflip=0.0,
+ jitter=0.4,
+ mean=IMAGENET_MEAN,
+ std=IMAGENET_STD,
+ auto_aug=False):
+ # YOLOv5 classification Albumentations (optional, only used if package is installed)
+ prefix = colorstr('albumentations: ')
+ try:
+ import albumentations as A
+ from albumentations.pytorch import ToTensorV2
+ check_version(A.__version__, '1.0.3', hard=True) # version requirement
+ if augment: # Resize and crop
+ T = [A.RandomResizedCrop(height=size, width=size, scale=scale)]
+ if auto_aug:
+ # TODO: implement AugMix, AutoAug & RandAug in albumentation
+ LOGGER.info(f'{prefix}auto augmentations are currently not supported')
+ else:
+ if hflip > 0:
+ T += [A.HorizontalFlip(p=hflip)]
+ if vflip > 0:
+ T += [A.VerticalFlip(p=vflip)]
+ if jitter > 0:
+ color_jitter = (float(jitter),) * 3 # repeat value for brightness, contrast, satuaration, 0 hue
+ T += [A.ColorJitter(*color_jitter, 0)]
+ else: # Use fixed crop for eval set (reproducibility)
+ T = [A.SmallestMaxSize(max_size=size), A.CenterCrop(height=size, width=size)]
+ T += [A.Normalize(mean=mean, std=std), ToTensorV2()] # Normalize and convert to Tensor
+ LOGGER.info(prefix + ', '.join(f'{x}'.replace('always_apply=False, ', '') for x in T if x.p))
+ return A.Compose(T)
+
+ except ImportError: # package not installed, skip
+ pass
+ except Exception as e:
+ LOGGER.info(f'{prefix}{e}')
+
+
+def classify_transforms(size=224):
+ # Transforms to apply if albumentations not installed
+ assert isinstance(size, int), f'ERROR: classify_transforms size {size} must be integer, not (list, tuple)'
+ return T.Compose([T.ToTensor(), T.Resize(size), T.CenterCrop(size), T.Normalize(IMAGENET_MEAN, IMAGENET_STD)])
diff --git a/yolov7_seg/seg/utils/autoanchor.py b/yolov7_seg/seg/utils/autoanchor.py
new file mode 100644
index 000000000..9a2ab2940
--- /dev/null
+++ b/yolov7_seg/seg/utils/autoanchor.py
@@ -0,0 +1,170 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+AutoAnchor utils
+"""
+
+import random
+
+import numpy as np
+import torch
+import yaml
+from tqdm import tqdm
+
+from utils.general import LOGGER, colorstr
+
+PREFIX = colorstr('AutoAnchor: ')
+
+
+def check_anchor_order(m):
+ # Check anchor order against stride order for YOLOv5 Detect() module m, and correct if necessary
+ a = m.anchors.prod(-1).mean(-1).view(-1) # mean anchor area per output layer
+ da = a[-1] - a[0] # delta a
+ ds = m.stride[-1] - m.stride[0] # delta s
+ if da and (da.sign() != ds.sign()): # same order
+ LOGGER.info(f'{PREFIX}Reversing anchor order')
+ m.anchors[:] = m.anchors.flip(0)
+
+
+def check_anchors(dataset, model, thr=4.0, imgsz=640):
+ # Check anchor fit to data, recompute if necessary
+ m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
+ shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
+ wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
+
+ def metric(k): # compute metric
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1 / r).min(2)[0] # ratio metric
+ best = x.max(1)[0] # best_x
+ aat = (x > 1 / thr).float().sum(1).mean() # anchors above threshold
+ bpr = (best > 1 / thr).float().mean() # best possible recall
+ return bpr, aat
+
+ stride = m.stride.to(m.anchors.device).view(-1, 1, 1) # model strides
+ anchors = m.anchors.clone() * stride # current anchors
+ bpr, aat = metric(anchors.cpu().view(-1, 2))
+ s = f'\n{PREFIX}{aat:.2f} anchors/target, {bpr:.3f} Best Possible Recall (BPR). '
+ if bpr > 0.98: # threshold to recompute
+ LOGGER.info(f'{s}Current anchors are a good fit to dataset ✅')
+ else:
+ LOGGER.info(f'{s}Anchors are a poor fit to dataset ⚠️, attempting to improve...')
+ na = m.anchors.numel() // 2 # number of anchors
+ try:
+ anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
+ except Exception as e:
+ LOGGER.info(f'{PREFIX}ERROR: {e}')
+ new_bpr = metric(anchors)[0]
+ if new_bpr > bpr: # replace anchors
+ anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
+ m.anchors[:] = anchors.clone().view_as(m.anchors)
+ check_anchor_order(m) # must be in pixel-space (not grid-space)
+ m.anchors /= stride
+ s = f'{PREFIX}Done ✅ (optional: update model *.yaml to use these anchors in the future)'
+ else:
+ s = f'{PREFIX}Done ⚠️ (original anchors better than new anchors, proceeding with original anchors)'
+ LOGGER.info(s)
+
+
+def kmean_anchors(dataset='./data/coco128.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
+ """ Creates kmeans-evolved anchors from training dataset
+
+ Arguments:
+ dataset: path to data.yaml, or a loaded dataset
+ n: number of anchors
+ img_size: image size used for training
+ thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
+ gen: generations to evolve anchors using genetic algorithm
+ verbose: print all results
+
+ Return:
+ k: kmeans evolved anchors
+
+ Usage:
+ from utils.autoanchor import *; _ = kmean_anchors()
+ """
+ from scipy.cluster.vq import kmeans
+
+ npr = np.random
+ thr = 1 / thr
+
+ def metric(k, wh): # compute metrics
+ r = wh[:, None] / k[None]
+ x = torch.min(r, 1 / r).min(2)[0] # ratio metric
+ # x = wh_iou(wh, torch.tensor(k)) # iou metric
+ return x, x.max(1)[0] # x, best_x
+
+ def anchor_fitness(k): # mutation fitness
+ _, best = metric(torch.tensor(k, dtype=torch.float32), wh)
+ return (best * (best > thr).float()).mean() # fitness
+
+ def print_results(k, verbose=True):
+ k = k[np.argsort(k.prod(1))] # sort small to large
+ x, best = metric(k, wh0)
+ bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
+ s = f'{PREFIX}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr\n' \
+ f'{PREFIX}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, ' \
+ f'past_thr={x[x > thr].mean():.3f}-mean: '
+ for x in k:
+ s += '%i,%i, ' % (round(x[0]), round(x[1]))
+ if verbose:
+ LOGGER.info(s[:-2])
+ return k
+
+ if isinstance(dataset, str): # *.yaml file
+ with open(dataset, errors='ignore') as f:
+ data_dict = yaml.safe_load(f) # model dict
+ from utils.dataloaders import LoadImagesAndLabels
+ dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
+
+ # Get label wh
+ shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
+ wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
+
+ # Filter
+ i = (wh0 < 3.0).any(1).sum()
+ if i:
+ LOGGER.info(f'{PREFIX}WARNING: Extremely small objects found: {i} of {len(wh0)} labels are < 3 pixels in size')
+ wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ # wh = wh * (npr.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
+
+ # Kmeans init
+ try:
+ LOGGER.info(f'{PREFIX}Running kmeans for {n} anchors on {len(wh)} points...')
+ assert n <= len(wh) # apply overdetermined constraint
+ s = wh.std(0) # sigmas for whitening
+ k = kmeans(wh / s, n, iter=30)[0] * s # points
+ assert n == len(k) # kmeans may return fewer points than requested if wh is insufficient or too similar
+ except Exception:
+ LOGGER.warning(f'{PREFIX}WARNING: switching strategies from kmeans to random init')
+ k = np.sort(npr.rand(n * 2)).reshape(n, 2) * img_size # random init
+ wh, wh0 = (torch.tensor(x, dtype=torch.float32) for x in (wh, wh0))
+ k = print_results(k, verbose=False)
+
+ # Plot
+ # k, d = [None] * 20, [None] * 20
+ # for i in tqdm(range(1, 21)):
+ # k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
+ # ax = ax.ravel()
+ # ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
+ # fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
+ # ax[0].hist(wh[wh[:, 0]<100, 0],400)
+ # ax[1].hist(wh[wh[:, 1]<100, 1],400)
+ # fig.savefig('wh.png', dpi=200)
+
+ # Evolve
+ f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
+ pbar = tqdm(range(gen), bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ for _ in pbar:
+ v = np.ones(sh)
+ while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
+ v = ((npr.random(sh) < mp) * random.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
+ kg = (k.copy() * v).clip(min=2.0)
+ fg = anchor_fitness(kg)
+ if fg > f:
+ f, k = fg, kg.copy()
+ pbar.desc = f'{PREFIX}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
+ if verbose:
+ print_results(k, verbose)
+
+ return print_results(k)
diff --git a/yolov7_seg/seg/utils/autobatch.py b/yolov7_seg/seg/utils/autobatch.py
new file mode 100644
index 000000000..30c56eb7a
--- /dev/null
+++ b/yolov7_seg/seg/utils/autobatch.py
@@ -0,0 +1,69 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Auto-batch utils
+"""
+
+from copy import deepcopy
+
+import numpy as np
+import torch
+
+from utils.general import LOGGER, colorstr
+from utils.torch_utils import profile
+
+
+def check_train_batch_size(model, imgsz=640, amp=True):
+ # Check YOLOv5 training batch size
+ with torch.cuda.amp.autocast(amp):
+ return autobatch(deepcopy(model).train(), imgsz) # compute optimal batch size
+
+
+def autobatch(model, imgsz=640, fraction=0.9, batch_size=16):
+ # Automatically estimate best batch size to use `fraction` of available CUDA memory
+ # Usage:
+ # import torch
+ # from utils.autobatch import autobatch
+ # model = torch.hub.load('ultralytics/yolov5', 'yolov5s', autoshape=False)
+ # print(autobatch(model))
+
+ # Check device
+ prefix = colorstr('AutoBatch: ')
+ LOGGER.info(f'{prefix}Computing optimal batch size for --imgsz {imgsz}')
+ device = next(model.parameters()).device # get model device
+ if device.type == 'cpu':
+ LOGGER.info(f'{prefix}CUDA not detected, using default CPU batch-size {batch_size}')
+ return batch_size
+
+ # Inspect CUDA memory
+ gb = 1 << 30 # bytes to GiB (1024 ** 3)
+ d = str(device).upper() # 'CUDA:0'
+ properties = torch.cuda.get_device_properties(device) # device properties
+ t = properties.total_memory / gb # GiB total
+ r = torch.cuda.memory_reserved(device) / gb # GiB reserved
+ a = torch.cuda.memory_allocated(device) / gb # GiB allocated
+ f = t - (r + a) # GiB free
+ LOGGER.info(f'{prefix}{d} ({properties.name}) {t:.2f}G total, {r:.2f}G reserved, {a:.2f}G allocated, {f:.2f}G free')
+
+ # Profile batch sizes
+ batch_sizes = [1, 2, 4, 8, 16]
+ try:
+ img = [torch.empty(b, 3, imgsz, imgsz) for b in batch_sizes]
+ results = profile(img, model, n=3, device=device)
+ except Exception as e:
+ LOGGER.warning(f'{prefix}{e}')
+
+ # Fit a solution
+ y = [x[2] for x in results if x] # memory [2]
+ p = np.polyfit(batch_sizes[:len(y)], y, deg=1) # first degree polynomial fit
+ b = int((f * fraction - p[1]) / p[0]) # y intercept (optimal batch size)
+ if None in results: # some sizes failed
+ i = results.index(None) # first fail index
+ if b >= batch_sizes[i]: # y intercept above failure point
+ b = batch_sizes[max(i - 1, 0)] # select prior safe point
+ if b < 1: # zero or negative batch size
+ b = 16
+ LOGGER.warning(f'{prefix}WARNING: ⚠️ CUDA anomaly detected, recommend restart environment and retry command.')
+
+ fraction = np.polyval(p, b) / t # actual fraction predicted
+ LOGGER.info(f'{prefix}Using batch-size {b} for {d} {t * fraction:.2f}G/{t:.2f}G ({fraction * 100:.0f}%) ✅')
+ return b
diff --git a/yolov7_seg/seg/utils/aws/__init__.py b/yolov7_seg/seg/utils/aws/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/yolov7_seg/seg/utils/aws/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/yolov7_seg/seg/utils/aws/mime.sh b/yolov7_seg/seg/utils/aws/mime.sh
new file mode 100644
index 000000000..4a4de18ec
--- /dev/null
+++ b/yolov7_seg/seg/utils/aws/mime.sh
@@ -0,0 +1,26 @@
+# AWS EC2 instance startup 'MIME' script https://aws.amazon.com/premiumsupport/knowledge-center/execute-user-data-ec2/
+# This script will run on every instance restart, not only on first start
+# --- DO NOT COPY ABOVE COMMENTS WHEN PASTING INTO USERDATA ---
+
+Content-Type: multipart/mixed; boundary="//"
+MIME-Version: 1.0
+
+--//
+Content-Type: text/cloud-config; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="cloud-config.txt"
+
+#cloud-config
+cloud_final_modules:
+- [scripts-user, always]
+
+--//
+Content-Type: text/x-shellscript; charset="us-ascii"
+MIME-Version: 1.0
+Content-Transfer-Encoding: 7bit
+Content-Disposition: attachment; filename="userdata.txt"
+
+#!/bin/bash
+# --- paste contents of userdata.sh here ---
+--//
diff --git a/yolov7_seg/seg/utils/aws/resume.py b/yolov7_seg/seg/utils/aws/resume.py
new file mode 100644
index 000000000..2e7b2d814
--- /dev/null
+++ b/yolov7_seg/seg/utils/aws/resume.py
@@ -0,0 +1,40 @@
+# Resume all interrupted trainings in yolov5/ dir including DDP trainings
+# Usage: $ python utils/aws/resume.py
+
+import os
+import sys
+from pathlib import Path
+
+import torch
+import yaml
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[2] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+port = 0 # --master_port
+path = Path('').resolve()
+for last in path.rglob('*/**/last.pt'):
+ ckpt = torch.load(last)
+ if ckpt['optimizer'] is None:
+ continue
+
+ # Load opt.yaml
+ with open(last.parent.parent / 'opt.yaml', errors='ignore') as f:
+ opt = yaml.safe_load(f)
+
+ # Get device count
+ d = opt['device'].split(',') # devices
+ nd = len(d) # number of devices
+ ddp = nd > 1 or (nd == 0 and torch.cuda.device_count() > 1) # distributed data parallel
+
+ if ddp: # multi-GPU
+ port += 1
+ cmd = f'python -m torch.distributed.run --nproc_per_node {nd} --master_port {port} train.py --resume {last}'
+ else: # single-GPU
+ cmd = f'python train.py --resume {last}'
+
+ cmd += ' > /dev/null 2>&1 &' # redirect output to dev/null and run in daemon thread
+ print(cmd)
+ os.system(cmd)
diff --git a/yolov7_seg/seg/utils/aws/userdata.sh b/yolov7_seg/seg/utils/aws/userdata.sh
new file mode 100644
index 000000000..53527ab84
--- /dev/null
+++ b/yolov7_seg/seg/utils/aws/userdata.sh
@@ -0,0 +1,27 @@
+#!/bin/bash
+# AWS EC2 instance startup script https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/user-data.html
+# This script will run only once on first instance start (for a re-start script see mime.sh)
+# /home/ubuntu (ubuntu) or /home/ec2-user (amazon-linux) is working dir
+# Use >300 GB SSD
+
+cd home/ubuntu
+if [ ! -d yolov5 ]; then
+ echo "Running first-time script." # install dependencies, download COCO, pull Docker
+ git clone https://github.com/ultralytics/yolov5 -b master && sudo chmod -R 777 yolov5
+ cd yolov5
+ bash data/scripts/get_coco.sh && echo "COCO done." &
+ sudo docker pull ultralytics/yolov5:latest && echo "Docker done." &
+ python -m pip install --upgrade pip && pip install -r requirements.txt && python detect.py && echo "Requirements done." &
+ wait && echo "All tasks done." # finish background tasks
+else
+ echo "Running re-start script." # resume interrupted runs
+ i=0
+ list=$(sudo docker ps -qa) # container list i.e. $'one\ntwo\nthree\nfour'
+ while IFS= read -r id; do
+ ((i++))
+ echo "restarting container $i: $id"
+ sudo docker start $id
+ # sudo docker exec -it $id python train.py --resume # single-GPU
+ sudo docker exec -d $id python utils/aws/resume.py # multi-scenario
+ done <<<"$list"
+fi
diff --git a/yolov7_seg/seg/utils/benchmarks.py b/yolov7_seg/seg/utils/benchmarks.py
new file mode 100644
index 000000000..bbb316783
--- /dev/null
+++ b/yolov7_seg/seg/utils/benchmarks.py
@@ -0,0 +1,157 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run YOLOv5 benchmarks on all supported export formats
+
+Format | `export.py --include` | Model
+--- | --- | ---
+PyTorch | - | yolov5s.pt
+TorchScript | `torchscript` | yolov5s.torchscript
+ONNX | `onnx` | yolov5s.onnx
+OpenVINO | `openvino` | yolov5s_openvino_model/
+TensorRT | `engine` | yolov5s.engine
+CoreML | `coreml` | yolov5s.mlmodel
+TensorFlow SavedModel | `saved_model` | yolov5s_saved_model/
+TensorFlow GraphDef | `pb` | yolov5s.pb
+TensorFlow Lite | `tflite` | yolov5s.tflite
+TensorFlow Edge TPU | `edgetpu` | yolov5s_edgetpu.tflite
+TensorFlow.js | `tfjs` | yolov5s_web_model/
+
+Requirements:
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime openvino-dev tensorflow-cpu # CPU
+ $ pip install -r requirements.txt coremltools onnx onnx-simplifier onnxruntime-gpu openvino-dev tensorflow # GPU
+ $ pip install -U nvidia-tensorrt --index-url https://pypi.ngc.nvidia.com # TensorRT
+
+Usage:
+ $ python utils/benchmarks.py --weights yolov5s.pt --img 640
+"""
+
+import argparse
+import platform
+import sys
+import time
+from pathlib import Path
+
+import pandas as pd
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+# ROOT = ROOT.relative_to(Path.cwd()) # relative
+
+import export
+import val
+from utils import notebook_init
+from utils.general import LOGGER, check_yaml, file_size, print_args
+from utils.torch_utils import select_device
+
+
+def run(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=640, # inference size (pixels)
+ batch_size=1, # batch size
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ half=False, # use FP16 half-precision inference
+ test=False, # test exports only
+ pt_only=False, # test PyTorch only
+ hard_fail=False, # throw error on benchmark failure
+):
+ y, t = [], time.time()
+ device = select_device(device)
+ for i, (name, f, suffix, cpu, gpu) in export.export_formats().iterrows(): # index, (name, file, suffix, CPU, GPU)
+ try:
+ assert i not in (9, 10), 'inference not supported' # Edge TPU and TF.js are unsupported
+ assert i != 5 or platform.system() == 'Darwin', 'inference only supported on macOS>=10.13' # CoreML
+ if 'cpu' in device.type:
+ assert cpu, 'inference not supported on CPU'
+ if 'cuda' in device.type:
+ assert gpu, 'inference not supported on GPU'
+
+ # Export
+ if f == '-':
+ w = weights # PyTorch format
+ else:
+ w = export.run(weights=weights, imgsz=[imgsz], include=[f], device=device, half=half)[-1] # all others
+ assert suffix in str(w), 'export failed'
+
+ # Validate
+ result = val.run(data, w, batch_size, imgsz, plots=False, device=device, task='benchmark', half=half)
+ metrics = result[0] # metrics (mp, mr, map50, map, *losses(box, obj, cls))
+ speeds = result[2] # times (preprocess, inference, postprocess)
+ y.append([name, round(file_size(w), 1), round(metrics[3], 4), round(speeds[1], 2)]) # MB, mAP, t_inference
+ except Exception as e:
+ if hard_fail:
+ assert type(e) is AssertionError, f'Benchmark --hard-fail for {name}: {e}'
+ LOGGER.warning(f'WARNING: Benchmark failure for {name}: {e}')
+ y.append([name, None, None, None]) # mAP, t_inference
+ if pt_only and i == 0:
+ break # break after PyTorch
+
+ # Print results
+ LOGGER.info('\n')
+ parse_opt()
+ notebook_init() # print system info
+ c = ['Format', 'Size (MB)', 'mAP@0.5:0.95', 'Inference time (ms)'] if map else ['Format', 'Export', '', '']
+ py = pd.DataFrame(y, columns=c)
+ LOGGER.info(f'\nBenchmarks complete ({time.time() - t:.2f}s)')
+ LOGGER.info(str(py if map else py.iloc[:, :2]))
+ return py
+
+
+def test(
+ weights=ROOT / 'yolov5s.pt', # weights path
+ imgsz=640, # inference size (pixels)
+ batch_size=1, # batch size
+ data=ROOT / 'data/coco128.yaml', # dataset.yaml path
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ half=False, # use FP16 half-precision inference
+ test=False, # test exports only
+ pt_only=False, # test PyTorch only
+ hard_fail=False, # throw error on benchmark failure
+):
+ y, t = [], time.time()
+ device = select_device(device)
+ for i, (name, f, suffix, gpu) in export.export_formats().iterrows(): # index, (name, file, suffix, gpu-capable)
+ try:
+ w = weights if f == '-' else \
+ export.run(weights=weights, imgsz=[imgsz], include=[f], device=device, half=half)[-1] # weights
+ assert suffix in str(w), 'export failed'
+ y.append([name, True])
+ except Exception:
+ y.append([name, False]) # mAP, t_inference
+
+ # Print results
+ LOGGER.info('\n')
+ parse_opt()
+ notebook_init() # print system info
+ py = pd.DataFrame(y, columns=['Format', 'Export'])
+ LOGGER.info(f'\nExports complete ({time.time() - t:.2f}s)')
+ LOGGER.info(str(py))
+ return py
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='weights path')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--batch-size', type=int, default=1, help='batch size')
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--test', action='store_true', help='test exports only')
+ parser.add_argument('--pt-only', action='store_true', help='test PyTorch only')
+ parser.add_argument('--hard-fail', action='store_true', help='throw error on benchmark failure')
+ opt = parser.parse_args()
+ opt.data = check_yaml(opt.data) # check YAML
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ test(**vars(opt)) if opt.test else run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/seg/utils/callbacks.py b/yolov7_seg/seg/utils/callbacks.py
new file mode 100644
index 000000000..2782abac6
--- /dev/null
+++ b/yolov7_seg/seg/utils/callbacks.py
@@ -0,0 +1,76 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Callback utils
+"""
+
+import threading
+
+
+class Callbacks:
+ """"
+ Handles all registered callbacks for YOLOv5 Hooks
+ """
+
+ def __init__(self):
+ # Define the available callbacks
+ self._callbacks = {
+ 'on_pretrain_routine_start': [],
+ 'on_pretrain_routine_end': [],
+ 'on_train_start': [],
+ 'on_train_epoch_start': [],
+ 'on_train_batch_start': [],
+ 'optimizer_step': [],
+ 'on_before_zero_grad': [],
+ 'on_train_batch_end': [],
+ 'on_train_epoch_end': [],
+ 'on_val_start': [],
+ 'on_val_batch_start': [],
+ 'on_val_image_end': [],
+ 'on_val_batch_end': [],
+ 'on_val_end': [],
+ 'on_fit_epoch_end': [], # fit = train + val
+ 'on_model_save': [],
+ 'on_train_end': [],
+ 'on_params_update': [],
+ 'teardown': [],}
+ self.stop_training = False # set True to interrupt training
+
+ def register_action(self, hook, name='', callback=None):
+ """
+ Register a new action to a callback hook
+
+ Args:
+ hook: The callback hook name to register the action to
+ name: The name of the action for later reference
+ callback: The callback to fire
+ """
+ assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
+ assert callable(callback), f"callback '{callback}' is not callable"
+ self._callbacks[hook].append({'name': name, 'callback': callback})
+
+ def get_registered_actions(self, hook=None):
+ """"
+ Returns all the registered actions by callback hook
+
+ Args:
+ hook: The name of the hook to check, defaults to all
+ """
+ return self._callbacks[hook] if hook else self._callbacks
+
+ def run(self, hook, *args, thread=False, **kwargs):
+ """
+ Loop through the registered actions and fire all callbacks on main thread
+
+ Args:
+ hook: The name of the hook to check, defaults to all
+ args: Arguments to receive from YOLOv5
+ thread: (boolean) Run callbacks in daemon thread
+ kwargs: Keyword Arguments to receive from YOLOv5
+ """
+
+ assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
+ for logger in self._callbacks[hook]:
+ if thread:
+ threading.Thread(target=logger['callback'], args=args, kwargs=kwargs, daemon=True).start()
+ else:
+ logger['callback'](*args, **kwargs)
diff --git a/yolov7_seg/seg/utils/dataloaders.py b/yolov7_seg/seg/utils/dataloaders.py
new file mode 100644
index 000000000..9b45c395a
--- /dev/null
+++ b/yolov7_seg/seg/utils/dataloaders.py
@@ -0,0 +1,1159 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Dataloaders and dataset utils
+"""
+
+import contextlib
+import glob
+import hashlib
+import json
+import math
+import os
+import random
+import shutil
+import time
+from itertools import repeat
+from multiprocessing.pool import Pool, ThreadPool
+from pathlib import Path
+from threading import Thread
+from urllib.parse import urlparse
+from zipfile import ZipFile
+
+import numpy as np
+import torch
+import torch.nn.functional as F
+import torchvision
+import yaml
+from PIL import ExifTags, Image, ImageOps
+from torch.utils.data import DataLoader, Dataset, dataloader, distributed
+from tqdm import tqdm
+
+from utils.augmentations import (Albumentations, augment_hsv, classify_albumentations, classify_transforms, copy_paste,
+ letterbox, mixup, random_perspective)
+from utils.general import (DATASETS_DIR, LOGGER, NUM_THREADS, check_dataset, check_requirements, check_yaml, clean_str,
+ cv2, is_colab, is_kaggle, segments2boxes, xyn2xy, xywh2xyxy, xywhn2xyxy, xyxy2xywhn)
+from utils.torch_utils import torch_distributed_zero_first
+
+# Parameters
+HELP_URL = 'See https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
+IMG_FORMATS = 'bmp', 'dng', 'jpeg', 'jpg', 'mpo', 'png', 'tif', 'tiff', 'webp' # include image suffixes
+VID_FORMATS = 'asf', 'avi', 'gif', 'm4v', 'mkv', 'mov', 'mp4', 'mpeg', 'mpg', 'ts', 'wmv' # include video suffixes
+BAR_FORMAT = '{l_bar}{bar:10}{r_bar}{bar:-10b}' # tqdm bar format
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+
+# Get orientation exif tag
+for orientation in ExifTags.TAGS.keys():
+ if ExifTags.TAGS[orientation] == 'Orientation':
+ break
+
+
+def get_hash(paths):
+ # Returns a single hash value of a list of paths (files or dirs)
+ size = sum(os.path.getsize(p) for p in paths if os.path.exists(p)) # sizes
+ h = hashlib.md5(str(size).encode()) # hash sizes
+ h.update(''.join(paths).encode()) # hash paths
+ return h.hexdigest() # return hash
+
+
+def exif_size(img):
+ # Returns exif-corrected PIL size
+ s = img.size # (width, height)
+ with contextlib.suppress(Exception):
+ rotation = dict(img._getexif().items())[orientation]
+ if rotation in [6, 8]: # rotation 270 or 90
+ s = (s[1], s[0])
+ return s
+
+
+def exif_transpose(image):
+ """
+ Transpose a PIL image accordingly if it has an EXIF Orientation tag.
+ Inplace version of https://github.com/python-pillow/Pillow/blob/master/src/PIL/ImageOps.py exif_transpose()
+
+ :param image: The image to transpose.
+ :return: An image.
+ """
+ exif = image.getexif()
+ orientation = exif.get(0x0112, 1) # default 1
+ if orientation > 1:
+ method = {
+ 2: Image.FLIP_LEFT_RIGHT,
+ 3: Image.ROTATE_180,
+ 4: Image.FLIP_TOP_BOTTOM,
+ 5: Image.TRANSPOSE,
+ 6: Image.ROTATE_270,
+ 7: Image.TRANSVERSE,
+ 8: Image.ROTATE_90,}.get(orientation)
+ if method is not None:
+ image = image.transpose(method)
+ del exif[0x0112]
+ image.info["exif"] = exif.tobytes()
+ return image
+
+
+def seed_worker(worker_id):
+ # Set dataloader worker seed https://pytorch.org/docs/stable/notes/randomness.html#dataloader
+ worker_seed = torch.initial_seed() % 2 ** 32
+ np.random.seed(worker_seed)
+ random.seed(worker_seed)
+
+
+def create_dataloader(path,
+ imgsz,
+ batch_size,
+ stride,
+ single_cls=False,
+ hyp=None,
+ augment=False,
+ cache=False,
+ pad=0.0,
+ rect=False,
+ rank=-1,
+ workers=8,
+ image_weights=False,
+ quad=False,
+ prefix='',
+ shuffle=False):
+ if rect and shuffle:
+ LOGGER.warning('WARNING: --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ shuffle = False
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = LoadImagesAndLabels(
+ path,
+ imgsz,
+ batch_size,
+ augment=augment, # augmentation
+ hyp=hyp, # hyperparameters
+ rect=rect, # rectangular batches
+ cache_images=cache,
+ single_cls=single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix)
+
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count() # number of CUDA devices
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
+ # generator = torch.Generator()
+ # generator.manual_seed(0)
+ return loader(
+ dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn,
+ worker_init_fn=seed_worker,
+ # generator=generator,
+ ), dataset
+
+
+class InfiniteDataLoader(dataloader.DataLoader):
+ """ Dataloader that reuses workers
+
+ Uses same syntax as vanilla DataLoader
+ """
+
+ def __init__(self, *args, **kwargs):
+ super().__init__(*args, **kwargs)
+ object.__setattr__(self, 'batch_sampler', _RepeatSampler(self.batch_sampler))
+ self.iterator = super().__iter__()
+
+ def __len__(self):
+ return len(self.batch_sampler.sampler)
+
+ def __iter__(self):
+ for _ in range(len(self)):
+ yield next(self.iterator)
+
+
+class _RepeatSampler:
+ """ Sampler that repeats forever
+
+ Args:
+ sampler (Sampler)
+ """
+
+ def __init__(self, sampler):
+ self.sampler = sampler
+
+ def __iter__(self):
+ while True:
+ yield from iter(self.sampler)
+
+
+class LoadImages:
+ # YOLOv5 image/video dataloader, i.e. `python detect.py --source image.jpg/vid.mp4`
+ def __init__(self, path, img_size=640, stride=32, auto=True, transforms=None):
+ files = []
+ for p in sorted(path) if isinstance(path, (list, tuple)) else [path]:
+ p = str(Path(p).resolve())
+ if '*' in p:
+ files.extend(sorted(glob.glob(p, recursive=True))) # glob
+ elif os.path.isdir(p):
+ files.extend(sorted(glob.glob(os.path.join(p, '*.*')))) # dir
+ elif os.path.isfile(p):
+ files.append(p) # files
+ else:
+ raise FileNotFoundError(f'{p} does not exist')
+
+ images = [x for x in files if x.split('.')[-1].lower() in IMG_FORMATS]
+ videos = [x for x in files if x.split('.')[-1].lower() in VID_FORMATS]
+ ni, nv = len(images), len(videos)
+
+ self.img_size = img_size
+ self.stride = stride
+ self.files = images + videos
+ self.nf = ni + nv # number of files
+ self.video_flag = [False] * ni + [True] * nv
+ self.mode = 'image'
+ self.auto = auto
+ self.transforms = transforms # optional
+ if any(videos):
+ self.new_video(videos[0]) # new video
+ else:
+ self.cap = None
+ assert self.nf > 0, f'No images or videos found in {p}. ' \
+ f'Supported formats are:\nimages: {IMG_FORMATS}\nvideos: {VID_FORMATS}'
+
+ def __iter__(self):
+ self.count = 0
+ return self
+
+ def __next__(self):
+ if self.count == self.nf:
+ raise StopIteration
+ path = self.files[self.count]
+
+ if self.video_flag[self.count]:
+ # Read video
+ self.mode = 'video'
+ ret_val, im0 = self.cap.read()
+ while not ret_val:
+ self.count += 1
+ self.cap.release()
+ if self.count == self.nf: # last video
+ raise StopIteration
+ path = self.files[self.count]
+ self.new_video(path)
+ ret_val, im0 = self.cap.read()
+
+ self.frame += 1
+ s = f'video {self.count + 1}/{self.nf} ({self.frame}/{self.frames}) {path}: '
+
+ else:
+ # Read image
+ self.count += 1
+ im0 = cv2.imread(path) # BGR
+ assert im0 is not None, f'Image Not Found {path}'
+ s = f'image {self.count}/{self.nf} {path}: '
+
+ if self.transforms:
+ im = self.transforms(cv2.cvtColor(im0, cv2.COLOR_BGR2RGB)) # transforms
+ else:
+ im = letterbox(im0, self.img_size, stride=self.stride, auto=self.auto)[0] # padded resize
+ im = im.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ im = np.ascontiguousarray(im) # contiguous
+
+ return path, im, im0, self.cap, s
+
+ def new_video(self, path):
+ self.frame = 0
+ self.cap = cv2.VideoCapture(path)
+ self.frames = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
+
+ def __len__(self):
+ return self.nf # number of files
+
+
+class LoadWebcam: # for inference
+ # YOLOv5 local webcam dataloader, i.e. `python detect.py --source 0`
+ def __init__(self, pipe='0', img_size=640, stride=32):
+ self.img_size = img_size
+ self.stride = stride
+ self.pipe = eval(pipe) if pipe.isnumeric() else pipe
+ self.cap = cv2.VideoCapture(self.pipe) # video capture object
+ self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ self.cap.release()
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Read frame
+ ret_val, im0 = self.cap.read()
+ im0 = cv2.flip(im0, 1) # flip left-right
+
+ # Print
+ assert ret_val, f'Camera Error {self.pipe}'
+ img_path = 'webcam.jpg'
+ s = f'webcam {self.count}: '
+
+ # Process
+ im = letterbox(im0, self.img_size, stride=self.stride)[0] # resize
+ im = im.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ im = np.ascontiguousarray(im) # contiguous
+
+ return img_path, im, im0, None, s
+
+ def __len__(self):
+ return 0
+
+
+class LoadStreams:
+ # YOLOv5 streamloader, i.e. `python detect.py --source 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP streams`
+ def __init__(self, sources='streams.txt', img_size=640, stride=32, auto=True, transforms=None):
+ self.mode = 'stream'
+ self.img_size = img_size
+ self.stride = stride
+
+ if os.path.isfile(sources):
+ with open(sources) as f:
+ sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
+ else:
+ sources = [sources]
+
+ n = len(sources)
+ self.imgs, self.fps, self.frames, self.threads = [None] * n, [0] * n, [0] * n, [None] * n
+ self.sources = [clean_str(x) for x in sources] # clean source names for later
+ for i, s in enumerate(sources): # index, source
+ # Start thread to read frames from video stream
+ st = f'{i + 1}/{n}: {s}... '
+ if urlparse(s).hostname in ('www.youtube.com', 'youtube.com', 'youtu.be'): # if source is YouTube video
+ check_requirements(('pafy', 'youtube_dl==2020.12.2'))
+ import pafy
+ s = pafy.new(s).getbest(preftype="mp4").url # YouTube URL
+ s = eval(s) if s.isnumeric() else s # i.e. s = '0' local webcam
+ if s == 0:
+ assert not is_colab(), '--source 0 webcam unsupported on Colab. Rerun command in a local environment.'
+ assert not is_kaggle(), '--source 0 webcam unsupported on Kaggle. Rerun command in a local environment.'
+ cap = cv2.VideoCapture(s)
+ assert cap.isOpened(), f'{st}Failed to open {s}'
+ w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ fps = cap.get(cv2.CAP_PROP_FPS) # warning: may return 0 or nan
+ self.frames[i] = max(int(cap.get(cv2.CAP_PROP_FRAME_COUNT)), 0) or float('inf') # infinite stream fallback
+ self.fps[i] = max((fps if math.isfinite(fps) else 0) % 100, 0) or 30 # 30 FPS fallback
+
+ _, self.imgs[i] = cap.read() # guarantee first frame
+ self.threads[i] = Thread(target=self.update, args=([i, cap, s]), daemon=True)
+ LOGGER.info(f"{st} Success ({self.frames[i]} frames {w}x{h} at {self.fps[i]:.2f} FPS)")
+ self.threads[i].start()
+ LOGGER.info('') # newline
+
+ # check for common shapes
+ s = np.stack([letterbox(x, img_size, stride=stride, auto=auto)[0].shape for x in self.imgs])
+ self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
+ self.auto = auto and self.rect
+ self.transforms = transforms # optional
+ if not self.rect:
+ LOGGER.warning('WARNING: Stream shapes differ. For optimal performance supply similarly-shaped streams.')
+
+ def update(self, i, cap, stream):
+ # Read stream `i` frames in daemon thread
+ n, f, read = 0, self.frames[i], 1 # frame number, frame array, inference every 'read' frame
+ while cap.isOpened() and n < f:
+ n += 1
+ # _, self.imgs[index] = cap.read()
+ cap.grab()
+ if n % read == 0:
+ success, im = cap.retrieve()
+ if success:
+ self.imgs[i] = im
+ else:
+ LOGGER.warning('WARNING: Video stream unresponsive, please check your IP camera connection.')
+ self.imgs[i] = np.zeros_like(self.imgs[i])
+ cap.open(stream) # re-open stream if signal was lost
+ time.sleep(0.0) # wait time
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if not all(x.is_alive() for x in self.threads) or cv2.waitKey(1) == ord('q'): # q to quit
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ im0 = self.imgs.copy()
+ if self.transforms:
+ im = np.stack([self.transforms(cv2.cvtColor(x, cv2.COLOR_BGR2RGB)) for x in im0]) # transforms
+ else:
+ im = np.stack([letterbox(x, self.img_size, stride=self.stride, auto=self.auto)[0] for x in im0]) # resize
+ im = im[..., ::-1].transpose((0, 3, 1, 2)) # BGR to RGB, BHWC to BCHW
+ im = np.ascontiguousarray(im) # contiguous
+
+ return self.sources, im, im0, None, ''
+
+ def __len__(self):
+ return len(self.sources) # 1E12 frames = 32 streams at 30 FPS for 30 years
+
+
+def img2label_paths(img_paths):
+ # Define label paths as a function of image paths
+ sa, sb = f'{os.sep}images{os.sep}', f'{os.sep}labels{os.sep}' # /images/, /labels/ substrings
+ return [sb.join(x.rsplit(sa, 1)).rsplit('.', 1)[0] + '.txt' for x in img_paths]
+
+
+class LoadImagesAndLabels(Dataset):
+ # YOLOv5 train_loader/val_loader, loads images and labels for training and validation
+ cache_version = 0.6 # dataset labels *.cache version
+ rand_interp_methods = [cv2.INTER_NEAREST, cv2.INTER_LINEAR, cv2.INTER_CUBIC, cv2.INTER_AREA, cv2.INTER_LANCZOS4]
+
+ def __init__(self,
+ path,
+ img_size=640,
+ batch_size=16,
+ augment=False,
+ hyp=None,
+ rect=False,
+ image_weights=False,
+ cache_images=False,
+ single_cls=False,
+ stride=32,
+ pad=0.0,
+ prefix=''):
+ self.img_size = img_size
+ self.augment = augment
+ self.hyp = hyp
+ self.image_weights = image_weights
+ self.rect = False if image_weights else rect
+ self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
+ self.mosaic_border = [-img_size // 2, -img_size // 2]
+ self.stride = stride
+ self.path = path
+ self.albumentations = Albumentations() if augment else None
+
+ try:
+ f = [] # image files
+ for p in path if isinstance(path, list) else [path]:
+ p = Path(p) # os-agnostic
+ if p.is_dir(): # dir
+ f += glob.glob(str(p / '**' / '*.*'), recursive=True)
+ # f = list(p.rglob('*.*')) # pathlib
+ elif p.is_file(): # file
+ with open(p) as t:
+ t = t.read().strip().splitlines()
+ parent = str(p.parent) + os.sep
+ f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
+ # f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
+ else:
+ raise FileNotFoundError(f'{prefix}{p} does not exist')
+ self.im_files = sorted(x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in IMG_FORMATS)
+ # self.img_files = sorted([x for x in f if x.suffix[1:].lower() in IMG_FORMATS]) # pathlib
+ assert self.im_files, f'{prefix}No images found'
+ except Exception as e:
+ raise Exception(f'{prefix}Error loading data from {path}: {e}\n{HELP_URL}')
+
+ # Check cache
+ self.label_files = img2label_paths(self.im_files) # labels
+ cache_path = (p if p.is_file() else Path(self.label_files[0]).parent).with_suffix('.cache')
+ try:
+ cache, exists = np.load(cache_path, allow_pickle=True).item(), True # load dict
+ assert cache['version'] == self.cache_version # matches current version
+ assert cache['hash'] == get_hash(self.label_files + self.im_files) # identical hash
+ except Exception:
+ cache, exists = self.cache_labels(cache_path, prefix), False # run cache ops
+
+ # Display cache
+ nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupt, total
+ if exists and LOCAL_RANK in {-1, 0}:
+ d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupt"
+ tqdm(None, desc=prefix + d, total=n, initial=n, bar_format=BAR_FORMAT) # display cache results
+ if cache['msgs']:
+ LOGGER.info('\n'.join(cache['msgs'])) # display warnings
+ assert nf > 0 or not augment, f'{prefix}No labels found in {cache_path}, can not start training. {HELP_URL}'
+
+ # Read cache
+ [cache.pop(k) for k in ('hash', 'version', 'msgs')] # remove items
+ labels, shapes, self.segments = zip(*cache.values())
+ nl = len(np.concatenate(labels, 0)) # number of labels
+ assert nl > 0 or not augment, f'{prefix}All labels empty in {cache_path}, can not start training. {HELP_URL}'
+ self.labels = list(labels)
+ self.shapes = np.array(shapes)
+ self.im_files = list(cache.keys()) # update
+ self.label_files = img2label_paths(cache.keys()) # update
+ n = len(shapes) # number of images
+ bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
+ nb = bi[-1] + 1 # number of batches
+ self.batch = bi # batch index of image
+ self.n = n
+ self.indices = range(n)
+
+ # Update labels
+ include_class = [] # filter labels to include only these classes (optional)
+ include_class_array = np.array(include_class).reshape(1, -1)
+ for i, (label, segment) in enumerate(zip(self.labels, self.segments)):
+ if include_class:
+ j = (label[:, 0:1] == include_class_array).any(1)
+ self.labels[i] = label[j]
+ if segment:
+ self.segments[i] = segment[j]
+ if single_cls: # single-class training, merge all classes into 0
+ self.labels[i][:, 0] = 0
+ if segment:
+ self.segments[i][:, 0] = 0
+
+ # Rectangular Training
+ if self.rect:
+ # Sort by aspect ratio
+ s = self.shapes # wh
+ ar = s[:, 1] / s[:, 0] # aspect ratio
+ irect = ar.argsort()
+ self.im_files = [self.im_files[i] for i in irect]
+ self.label_files = [self.label_files[i] for i in irect]
+ self.labels = [self.labels[i] for i in irect]
+ self.segments = [self.segments[i] for i in irect]
+ self.shapes = s[irect] # wh
+ ar = ar[irect]
+
+ # Set training image shapes
+ shapes = [[1, 1]] * nb
+ for i in range(nb):
+ ari = ar[bi == i]
+ mini, maxi = ari.min(), ari.max()
+ if maxi < 1:
+ shapes[i] = [maxi, 1]
+ elif mini > 1:
+ shapes[i] = [1, 1 / mini]
+
+ self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(np.int) * stride
+
+ # Cache images into RAM/disk for faster training (WARNING: large datasets may exceed system resources)
+ self.ims = [None] * n
+ self.npy_files = [Path(f).with_suffix('.npy') for f in self.im_files]
+ if cache_images:
+ gb = 0 # Gigabytes of cached images
+ self.im_hw0, self.im_hw = [None] * n, [None] * n
+ fcn = self.cache_images_to_disk if cache_images == 'disk' else self.load_image
+ results = ThreadPool(NUM_THREADS).imap(fcn, range(n))
+ pbar = tqdm(enumerate(results), total=n, bar_format=BAR_FORMAT, disable=LOCAL_RANK > 0)
+ for i, x in pbar:
+ if cache_images == 'disk':
+ gb += self.npy_files[i].stat().st_size
+ else: # 'ram'
+ self.ims[i], self.im_hw0[i], self.im_hw[i] = x # im, hw_orig, hw_resized = load_image(self, i)
+ gb += self.ims[i].nbytes
+ pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB {cache_images})'
+ pbar.close()
+
+ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
+ # Cache dataset labels, check images and read shapes
+ x = {} # dict
+ nm, nf, ne, nc, msgs = 0, 0, 0, 0, [] # number missing, found, empty, corrupt, messages
+ desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels..."
+ with Pool(NUM_THREADS) as pool:
+ pbar = tqdm(pool.imap(verify_image_label, zip(self.im_files, self.label_files, repeat(prefix))),
+ desc=desc,
+ total=len(self.im_files),
+ bar_format=BAR_FORMAT)
+ for im_file, lb, shape, segments, nm_f, nf_f, ne_f, nc_f, msg in pbar:
+ nm += nm_f
+ nf += nf_f
+ ne += ne_f
+ nc += nc_f
+ if im_file:
+ x[im_file] = [lb, shape, segments]
+ if msg:
+ msgs.append(msg)
+ pbar.desc = f"{desc}{nf} found, {nm} missing, {ne} empty, {nc} corrupt"
+
+ pbar.close()
+ if msgs:
+ LOGGER.info('\n'.join(msgs))
+ if nf == 0:
+ LOGGER.warning(f'{prefix}WARNING: No labels found in {path}. {HELP_URL}')
+ x['hash'] = get_hash(self.label_files + self.im_files)
+ x['results'] = nf, nm, ne, nc, len(self.im_files)
+ x['msgs'] = msgs # warnings
+ x['version'] = self.cache_version # cache version
+ try:
+ np.save(path, x) # save cache for next time
+ path.with_suffix('.cache.npy').rename(path) # remove .npy suffix
+ LOGGER.info(f'{prefix}New cache created: {path}')
+ except Exception as e:
+ LOGGER.warning(f'{prefix}WARNING: Cache directory {path.parent} is not writeable: {e}') # not writeable
+ return x
+
+ def __len__(self):
+ return len(self.im_files)
+
+ # def __iter__(self):
+ # self.count = -1
+ # print('ran dataset iter')
+ # #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
+ # return self
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ if mosaic:
+ # Load mosaic
+ img, labels = self.load_mosaic(index)
+ shapes = None
+
+ # MixUp augmentation
+ if random.random() < hyp['mixup']:
+ img, labels = mixup(img, labels, *self.load_mosaic(random.randint(0, self.n - 1)))
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = self.load_image(index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ img, labels = random_perspective(img,
+ labels,
+ degrees=hyp['degrees'],
+ translate=hyp['translate'],
+ scale=hyp['scale'],
+ shear=hyp['shear'],
+ perspective=hyp['perspective'])
+
+ nl = len(labels) # number of labels
+ if nl:
+ labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1E-3)
+
+ if self.augment:
+ # Albumentations
+ img, labels = self.albumentations(img, labels)
+ nl = len(labels) # update after albumentations
+
+ # HSV color-space
+ augment_hsv(img, hgain=hyp['hsv_h'], sgain=hyp['hsv_s'], vgain=hyp['hsv_v'])
+
+ # Flip up-down
+ if random.random() < hyp['flipud']:
+ img = np.flipud(img)
+ if nl:
+ labels[:, 2] = 1 - labels[:, 2]
+
+ # Flip left-right
+ if random.random() < hyp['fliplr']:
+ img = np.fliplr(img)
+ if nl:
+ labels[:, 1] = 1 - labels[:, 1]
+
+ # Cutouts
+ # labels = cutout(img, labels, p=0.5)
+ # nl = len(labels) # update after cutout
+
+ labels_out = torch.zeros((nl, 6))
+ if nl:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return torch.from_numpy(img), labels_out, self.im_files[index], shapes
+
+ def load_image(self, i):
+ # Loads 1 image from dataset index 'i', returns (im, original hw, resized hw)
+ im, f, fn = self.ims[i], self.im_files[i], self.npy_files[i],
+ if im is None: # not cached in RAM
+ if fn.exists(): # load npy
+ im = np.load(fn)
+ else: # read image
+ im = cv2.imread(f) # BGR
+ assert im is not None, f'Image Not Found {f}'
+ h0, w0 = im.shape[:2] # orig hw
+ r = self.img_size / max(h0, w0) # ratio
+ if r != 1: # if sizes are not equal
+ interp = cv2.INTER_LINEAR if (self.augment or r > 1) else cv2.INTER_AREA
+ im = cv2.resize(im, (int(w0 * r), int(h0 * r)), interpolation=interp)
+ return im, (h0, w0), im.shape[:2] # im, hw_original, hw_resized
+ return self.ims[i], self.im_hw0[i], self.im_hw[i] # im, hw_original, hw_resized
+
+ def cache_images_to_disk(self, i):
+ # Saves an image as an *.npy file for faster loading
+ f = self.npy_files[i]
+ if not f.exists():
+ np.save(f.as_posix(), cv2.imread(self.im_files[i]))
+
+ def load_mosaic(self, index):
+ # YOLOv5 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ random.shuffle(indices)
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp['copy_paste'])
+ img4, labels4 = random_perspective(img4,
+ labels4,
+ segments4,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img4, labels4
+
+ def load_mosaic9(self, index):
+ # YOLOv5 9-mosaic loader. Loads 1 image + 8 random images into a 9-image mosaic
+ labels9, segments9 = [], []
+ s = self.img_size
+ indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
+ random.shuffle(indices)
+ hp, wp = -1, -1 # height, width previous
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img9
+ if i == 0: # center
+ img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ h0, w0 = h, w
+ c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
+ elif i == 1: # top
+ c = s, s - h, s + w, s
+ elif i == 2: # top right
+ c = s + wp, s - h, s + wp + w, s
+ elif i == 3: # right
+ c = s + w0, s, s + w0 + w, s + h
+ elif i == 4: # bottom right
+ c = s + w0, s + hp, s + w0 + w, s + hp + h
+ elif i == 5: # bottom
+ c = s + w0 - w, s + h0, s + w0, s + h0 + h
+ elif i == 6: # bottom left
+ c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
+ elif i == 7: # left
+ c = s - w, s + h0 - h, s, s + h0
+ elif i == 8: # top left
+ c = s - w, s + h0 - hp - h, s, s + h0 - hp
+
+ padx, pady = c[:2]
+ x1, y1, x2, y2 = (max(x, 0) for x in c) # allocate coords
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
+ labels9.append(labels)
+ segments9.extend(segments)
+
+ # Image
+ img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
+ hp, wp = h, w # height, width previous
+
+ # Offset
+ yc, xc = (int(random.uniform(0, s)) for _ in self.mosaic_border) # mosaic center x, y
+ img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
+
+ # Concat/clip labels
+ labels9 = np.concatenate(labels9, 0)
+ labels9[:, [1, 3]] -= xc
+ labels9[:, [2, 4]] -= yc
+ c = np.array([xc, yc]) # centers
+ segments9 = [x - c for x in segments9]
+
+ for x in (labels9[:, 1:], *segments9):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img9, labels9 = replicate(img9, labels9) # replicate
+
+ # Augment
+ img9, labels9 = random_perspective(img9,
+ labels9,
+ segments9,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img9, labels9
+
+ @staticmethod
+ def collate_fn(batch):
+ im, label, path, shapes = zip(*batch) # transposed
+ for i, lb in enumerate(label):
+ lb[:, 0] = i # add target image index for build_targets()
+ return torch.stack(im, 0), torch.cat(label, 0), path, shapes
+
+ @staticmethod
+ def collate_fn4(batch):
+ im, label, path, shapes = zip(*batch) # transposed
+ n = len(shapes) // 4
+ im4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
+
+ ho = torch.tensor([[0.0, 0, 0, 1, 0, 0]])
+ wo = torch.tensor([[0.0, 0, 1, 0, 0, 0]])
+ s = torch.tensor([[1, 1, 0.5, 0.5, 0.5, 0.5]]) # scale
+ for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
+ i *= 4
+ if random.random() < 0.5:
+ im1 = F.interpolate(im[i].unsqueeze(0).float(), scale_factor=2.0, mode='bilinear',
+ align_corners=False)[0].type(im[i].type())
+ lb = label[i]
+ else:
+ im1 = torch.cat((torch.cat((im[i], im[i + 1]), 1), torch.cat((im[i + 2], im[i + 3]), 1)), 2)
+ lb = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
+ im4.append(im1)
+ label4.append(lb)
+
+ for i, lb in enumerate(label4):
+ lb[:, 0] = i # add target image index for build_targets()
+
+ return torch.stack(im4, 0), torch.cat(label4, 0), path4, shapes4
+
+
+# Ancillary functions --------------------------------------------------------------------------------------------------
+def flatten_recursive(path=DATASETS_DIR / 'coco128'):
+ # Flatten a recursive directory by bringing all files to top level
+ new_path = Path(f'{str(path)}_flat')
+ if os.path.exists(new_path):
+ shutil.rmtree(new_path) # delete output folder
+ os.makedirs(new_path) # make new output folder
+ for file in tqdm(glob.glob(f'{str(Path(path))}/**/*.*', recursive=True)):
+ shutil.copyfile(file, new_path / Path(file).name)
+
+
+def extract_boxes(path=DATASETS_DIR / 'coco128'): # from utils.dataloaders import *; extract_boxes()
+ # Convert detection dataset into classification dataset, with one directory per class
+ path = Path(path) # images dir
+ shutil.rmtree(path / 'classification') if (path / 'classification').is_dir() else None # remove existing
+ files = list(path.rglob('*.*'))
+ n = len(files) # number of files
+ for im_file in tqdm(files, total=n):
+ if im_file.suffix[1:] in IMG_FORMATS:
+ # image
+ im = cv2.imread(str(im_file))[..., ::-1] # BGR to RGB
+ h, w = im.shape[:2]
+
+ # labels
+ lb_file = Path(img2label_paths([str(im_file)])[0])
+ if Path(lb_file).exists():
+ with open(lb_file) as f:
+ lb = np.array([x.split() for x in f.read().strip().splitlines()], dtype=np.float32) # labels
+
+ for j, x in enumerate(lb):
+ c = int(x[0]) # class
+ f = (path / 'classifier') / f'{c}' / f'{path.stem}_{im_file.stem}_{j}.jpg' # new filename
+ if not f.parent.is_dir():
+ f.parent.mkdir(parents=True)
+
+ b = x[1:] * [w, h, w, h] # box
+ # b[2:] = b[2:].max() # rectangle to square
+ b[2:] = b[2:] * 1.2 + 3 # pad
+ b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
+
+ b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
+ b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
+ assert cv2.imwrite(str(f), im[b[1]:b[3], b[0]:b[2]]), f'box failure in {f}'
+
+
+def autosplit(path=DATASETS_DIR / 'coco128/images', weights=(0.9, 0.1, 0.0), annotated_only=False):
+ """ Autosplit a dataset into train/val/test splits and save path/autosplit_*.txt files
+ Usage: from utils.dataloaders import *; autosplit()
+ Arguments
+ path: Path to images directory
+ weights: Train, val, test weights (list, tuple)
+ annotated_only: Only use images with an annotated txt file
+ """
+ path = Path(path) # images dir
+ files = sorted(x for x in path.rglob('*.*') if x.suffix[1:].lower() in IMG_FORMATS) # image files only
+ n = len(files) # number of files
+ random.seed(0) # for reproducibility
+ indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
+
+ txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
+ [(path.parent / x).unlink(missing_ok=True) for x in txt] # remove existing
+
+ print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
+ for i, img in tqdm(zip(indices, files), total=n):
+ if not annotated_only or Path(img2label_paths([str(img)])[0]).exists(): # check label
+ with open(path.parent / txt[i], 'a') as f:
+ f.write(f'./{img.relative_to(path.parent).as_posix()}' + '\n') # add image to txt file
+
+
+def verify_image_label(args):
+ # Verify one image-label pair
+ im_file, lb_file, prefix = args
+ nm, nf, ne, nc, msg, segments = 0, 0, 0, 0, '', [] # number (missing, found, empty, corrupt), message, segments
+ try:
+ # verify images
+ im = Image.open(im_file)
+ im.verify() # PIL verify
+ shape = exif_size(im) # image size
+ assert (shape[0] > 9) & (shape[1] > 9), f'image size {shape} <10 pixels'
+ assert im.format.lower() in IMG_FORMATS, f'invalid image format {im.format}'
+ if im.format.lower() in ('jpg', 'jpeg'):
+ with open(im_file, 'rb') as f:
+ f.seek(-2, 2)
+ if f.read() != b'\xff\xd9': # corrupt JPEG
+ ImageOps.exif_transpose(Image.open(im_file)).save(im_file, 'JPEG', subsampling=0, quality=100)
+ msg = f'{prefix}WARNING: {im_file}: corrupt JPEG restored and saved'
+
+ # verify labels
+ if os.path.isfile(lb_file):
+ nf = 1 # label found
+ with open(lb_file) as f:
+ lb = [x.split() for x in f.read().strip().splitlines() if len(x)]
+ if any(len(x) > 6 for x in lb): # is segment
+ classes = np.array([x[0] for x in lb], dtype=np.float32)
+ segments = [np.array(x[1:], dtype=np.float32).reshape(-1, 2) for x in lb] # (cls, xy1...)
+ lb = np.concatenate((classes.reshape(-1, 1), segments2boxes(segments)), 1) # (cls, xywh)
+ lb = np.array(lb, dtype=np.float32)
+ nl = len(lb)
+ if nl:
+ assert lb.shape[1] == 5, f'labels require 5 columns, {lb.shape[1]} columns detected'
+ assert (lb >= 0).all(), f'negative label values {lb[lb < 0]}'
+ assert (lb[:, 1:] <= 1).all(), f'non-normalized or out of bounds coordinates {lb[:, 1:][lb[:, 1:] > 1]}'
+ _, i = np.unique(lb, axis=0, return_index=True)
+ if len(i) < nl: # duplicate row check
+ lb = lb[i] # remove duplicates
+ if segments:
+ #segments = segments[i]
+ segments = [segments[x] for x in i]
+ msg = f'{prefix}WARNING: {im_file}: {nl - len(i)} duplicate labels removed'
+ else:
+ ne = 1 # label empty
+ lb = np.zeros((0, 5), dtype=np.float32)
+ else:
+ nm = 1 # label missing
+ lb = np.zeros((0, 5), dtype=np.float32)
+ return im_file, lb, shape, segments, nm, nf, ne, nc, msg
+ except Exception as e:
+ nc = 1
+ msg = f'{prefix}WARNING: {im_file}: ignoring corrupt image/label: {e}'
+ return [None, None, None, None, nm, nf, ne, nc, msg]
+
+
+class HUBDatasetStats():
+ """ Return dataset statistics dictionary with images and instances counts per split per class
+ To run in parent directory: export PYTHONPATH="$PWD/yolov5"
+ Usage1: from utils.dataloaders import *; HUBDatasetStats('coco128.yaml', autodownload=True)
+ Usage2: from utils.dataloaders import *; HUBDatasetStats('path/to/coco128_with_yaml.zip')
+ Arguments
+ path: Path to data.yaml or data.zip (with data.yaml inside data.zip)
+ autodownload: Attempt to download dataset if not found locally
+ """
+
+ def __init__(self, path='coco128.yaml', autodownload=False):
+ # Initialize class
+ zipped, data_dir, yaml_path = self._unzip(Path(path))
+ try:
+ with open(check_yaml(yaml_path), errors='ignore') as f:
+ data = yaml.safe_load(f) # data dict
+ if zipped:
+ data['path'] = data_dir
+ except Exception as e:
+ raise Exception("error/HUB/dataset_stats/yaml_load") from e
+
+ check_dataset(data, autodownload) # download dataset if missing
+ self.hub_dir = Path(data['path'] + '-hub')
+ self.im_dir = self.hub_dir / 'images'
+ self.im_dir.mkdir(parents=True, exist_ok=True) # makes /images
+ self.stats = {'nc': data['nc'], 'names': list(data['names'].values())} # statistics dictionary
+ self.data = data
+
+ @staticmethod
+ def _find_yaml(dir):
+ # Return data.yaml file
+ files = list(dir.glob('*.yaml')) or list(dir.rglob('*.yaml')) # try root level first and then recursive
+ assert files, f'No *.yaml file found in {dir}'
+ if len(files) > 1:
+ files = [f for f in files if f.stem == dir.stem] # prefer *.yaml files that match dir name
+ assert files, f'Multiple *.yaml files found in {dir}, only 1 *.yaml file allowed'
+ assert len(files) == 1, f'Multiple *.yaml files found: {files}, only 1 *.yaml file allowed in {dir}'
+ return files[0]
+
+ def _unzip(self, path):
+ # Unzip data.zip
+ if not str(path).endswith('.zip'): # path is data.yaml
+ return False, None, path
+ assert Path(path).is_file(), f'Error unzipping {path}, file not found'
+ ZipFile(path).extractall(path=path.parent) # unzip
+ dir = path.with_suffix('') # dataset directory == zip name
+ assert dir.is_dir(), f'Error unzipping {path}, {dir} not found. path/to/abc.zip MUST unzip to path/to/abc/'
+ return True, str(dir), self._find_yaml(dir) # zipped, data_dir, yaml_path
+
+ def _hub_ops(self, f, max_dim=1920):
+ # HUB ops for 1 image 'f': resize and save at reduced quality in /dataset-hub for web/app viewing
+ f_new = self.im_dir / Path(f).name # dataset-hub image filename
+ try: # use PIL
+ im = Image.open(f)
+ r = max_dim / max(im.height, im.width) # ratio
+ if r < 1.0: # image too large
+ im = im.resize((int(im.width * r), int(im.height * r)))
+ im.save(f_new, 'JPEG', quality=50, optimize=True) # save
+ except Exception as e: # use OpenCV
+ print(f'WARNING: HUB ops PIL failure {f}: {e}')
+ im = cv2.imread(f)
+ im_height, im_width = im.shape[:2]
+ r = max_dim / max(im_height, im_width) # ratio
+ if r < 1.0: # image too large
+ im = cv2.resize(im, (int(im_width * r), int(im_height * r)), interpolation=cv2.INTER_AREA)
+ cv2.imwrite(str(f_new), im)
+
+ def get_json(self, save=False, verbose=False):
+ # Return dataset JSON for Ultralytics HUB
+ def _round(labels):
+ # Update labels to integer class and 6 decimal place floats
+ return [[int(c), *(round(x, 4) for x in points)] for c, *points in labels]
+
+ for split in 'train', 'val', 'test':
+ if self.data.get(split) is None:
+ self.stats[split] = None # i.e. no test set
+ continue
+ dataset = LoadImagesAndLabels(self.data[split]) # load dataset
+ x = np.array([
+ np.bincount(label[:, 0].astype(int), minlength=self.data['nc'])
+ for label in tqdm(dataset.labels, total=dataset.n, desc='Statistics')]) # shape(128x80)
+ self.stats[split] = {
+ 'instance_stats': {
+ 'total': int(x.sum()),
+ 'per_class': x.sum(0).tolist()},
+ 'image_stats': {
+ 'total': dataset.n,
+ 'unlabelled': int(np.all(x == 0, 1).sum()),
+ 'per_class': (x > 0).sum(0).tolist()},
+ 'labels': [{
+ str(Path(k).name): _round(v.tolist())} for k, v in zip(dataset.im_files, dataset.labels)]}
+
+ # Save, print and return
+ if save:
+ stats_path = self.hub_dir / 'stats.json'
+ print(f'Saving {stats_path.resolve()}...')
+ with open(stats_path, 'w') as f:
+ json.dump(self.stats, f) # save stats.json
+ if verbose:
+ print(json.dumps(self.stats, indent=2, sort_keys=False))
+ return self.stats
+
+ def process_images(self):
+ # Compress images for Ultralytics HUB
+ for split in 'train', 'val', 'test':
+ if self.data.get(split) is None:
+ continue
+ dataset = LoadImagesAndLabels(self.data[split]) # load dataset
+ desc = f'{split} images'
+ for _ in tqdm(ThreadPool(NUM_THREADS).imap(self._hub_ops, dataset.im_files), total=dataset.n, desc=desc):
+ pass
+ print(f'Done. All images saved to {self.im_dir}')
+ return self.im_dir
+
+
+# Classification dataloaders -------------------------------------------------------------------------------------------
+class ClassificationDataset(torchvision.datasets.ImageFolder):
+ """
+ YOLOv5 Classification Dataset.
+ Arguments
+ root: Dataset path
+ transform: torchvision transforms, used by default
+ album_transform: Albumentations transforms, used if installed
+ """
+
+ def __init__(self, root, augment, imgsz, cache=False):
+ super().__init__(root=root)
+ self.torch_transforms = classify_transforms(imgsz)
+ self.album_transforms = classify_albumentations(augment, imgsz) if augment else None
+ self.cache_ram = cache is True or cache == 'ram'
+ self.cache_disk = cache == 'disk'
+ self.samples = [list(x) + [Path(x[0]).with_suffix('.npy'), None] for x in self.samples] # file, index, npy, im
+
+ def __getitem__(self, i):
+ f, j, fn, im = self.samples[i] # filename, index, filename.with_suffix('.npy'), image
+ if self.album_transforms:
+ if self.cache_ram and im is None:
+ im = self.samples[i][3] = cv2.imread(f)
+ elif self.cache_disk:
+ if not fn.exists(): # load npy
+ np.save(fn.as_posix(), cv2.imread(f))
+ im = np.load(fn)
+ else: # read image
+ im = cv2.imread(f) # BGR
+ sample = self.album_transforms(image=cv2.cvtColor(im, cv2.COLOR_BGR2RGB))["image"]
+ else:
+ sample = self.torch_transforms(self.loader(f))
+ return sample, j
+
+
+def create_classification_dataloader(path,
+ imgsz=224,
+ batch_size=16,
+ augment=True,
+ cache=False,
+ rank=-1,
+ workers=8,
+ shuffle=True):
+ # Returns Dataloader object to be used with YOLOv5 Classifier
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = ClassificationDataset(root=path, imgsz=imgsz, augment=augment, cache=cache)
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count()
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers])
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ generator = torch.Generator()
+ generator.manual_seed(0)
+ return InfiniteDataLoader(dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ worker_init_fn=seed_worker,
+ generator=generator) # or DataLoader(persistent_workers=True)
diff --git a/yolov7_seg/seg/utils/docker/Dockerfile b/yolov7_seg/seg/utils/docker/Dockerfile
new file mode 100644
index 000000000..8395003f8
--- /dev/null
+++ b/yolov7_seg/seg/utils/docker/Dockerfile
@@ -0,0 +1,65 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is CUDA-optimized for YOLOv5 single/multi-GPU training and inference
+
+# Start FROM NVIDIA PyTorch image https://ngc.nvidia.com/catalog/containers/nvidia:pytorch
+FROM nvcr.io/nvidia/pytorch:22.07-py3
+RUN rm -rf /opt/pytorch # remove 1.2GB dir
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update && apt install --no-install-recommends -y zip htop screen libgl1-mesa-glx
+
+# Install pip packages
+COPY requirements.txt .
+RUN python -m pip install --upgrade pip wheel
+RUN pip uninstall -y Pillow torchtext torch torchvision
+RUN pip install --no-cache -r requirements.txt albumentations wandb gsutil notebook Pillow>=9.1.0 \
+ 'opencv-python<4.6.0.66' \
+ --extra-index-url https://download.pytorch.org/whl/cu113
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+# Set environment variables
+ENV OMP_NUM_THREADS=8
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest && sudo docker build -f utils/docker/Dockerfile -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all $t
+
+# Pull and Run with local directory access
+# t=ultralytics/yolov5:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all -v "$(pwd)"/datasets:/usr/src/datasets $t
+
+# Kill all
+# sudo docker kill $(sudo docker ps -q)
+
+# Kill all image-based
+# sudo docker kill $(sudo docker ps -qa --filter ancestor=ultralytics/yolov5:latest)
+
+# DockerHub tag update
+# t=ultralytics/yolov5:latest tnew=ultralytics/yolov5:v6.2 && sudo docker pull $t && sudo docker tag $t $tnew && sudo docker push $tnew
+
+# Clean up
+# docker system prune -a --volumes
+
+# Update Ubuntu drivers
+# https://www.maketecheasier.com/install-nvidia-drivers-ubuntu/
+
+# DDP test
+# python -m torch.distributed.run --nproc_per_node 2 --master_port 1 train.py --epochs 3
+
+# GCP VM from Image
+# docker.io/ultralytics/yolov5:latest
diff --git a/yolov7_seg/seg/utils/docker/Dockerfile-arm64 b/yolov7_seg/seg/utils/docker/Dockerfile-arm64
new file mode 100644
index 000000000..ebcf7ae0b
--- /dev/null
+++ b/yolov7_seg/seg/utils/docker/Dockerfile-arm64
@@ -0,0 +1,42 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest-arm64 image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is aarch64-compatible for Apple M1 and other ARM architectures i.e. Jetson Nano and Raspberry Pi
+
+# Start FROM Ubuntu image https://hub.docker.com/_/ubuntu
+FROM arm64v8/ubuntu:20.04
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update
+RUN DEBIAN_FRONTEND=noninteractive TZ=Etc/UTC apt install -y tzdata
+RUN apt install --no-install-recommends -y python3-pip git zip curl htop gcc \
+ libgl1-mesa-glx libglib2.0-0 libpython3.8-dev
+# RUN alias python=python3
+
+# Install pip packages
+COPY requirements.txt .
+RUN python3 -m pip install --upgrade pip wheel
+RUN pip install --no-cache -r requirements.txt gsutil notebook \
+ tensorflow-aarch64
+ # tensorflowjs \
+ # onnx onnx-simplifier onnxruntime \
+ # coremltools openvino-dev \
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest-M1 && sudo docker build --platform linux/arm64 -f utils/docker/Dockerfile-arm64 -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest-M1 && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
diff --git a/yolov7_seg/seg/utils/docker/Dockerfile-cpu b/yolov7_seg/seg/utils/docker/Dockerfile-cpu
new file mode 100644
index 000000000..ada8e1ee2
--- /dev/null
+++ b/yolov7_seg/seg/utils/docker/Dockerfile-cpu
@@ -0,0 +1,40 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Builds ultralytics/yolov5:latest-cpu image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
+# Image is CPU-optimized for ONNX, OpenVINO and PyTorch YOLOv5 deployments
+
+# Start FROM Ubuntu image https://hub.docker.com/_/ubuntu
+FROM ubuntu:20.04
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
+
+# Install linux packages
+RUN apt update
+RUN DEBIAN_FRONTEND=noninteractive TZ=Etc/UTC apt install -y tzdata
+RUN apt install --no-install-recommends -y python3-pip git zip curl htop libgl1-mesa-glx libglib2.0-0 libpython3-dev
+# RUN alias python=python3
+
+# Install pip packages
+COPY requirements.txt .
+RUN python3 -m pip install --upgrade pip wheel
+RUN pip install --no-cache -r requirements.txt albumentations gsutil notebook \
+ coremltools onnx onnx-simplifier onnxruntime tensorflow-cpu tensorflowjs \
+ # openvino-dev \
+ --extra-index-url https://download.pytorch.org/whl/cpu
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+# COPY . /usr/src/app (issues as not a .git directory)
+RUN git clone https://github.com/ultralytics/yolov5 /usr/src/app
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov5:latest-cpu && sudo docker build -f utils/docker/Dockerfile-cpu -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov5:latest-cpu && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
diff --git a/yolov7_seg/seg/utils/downloads.py b/yolov7_seg/seg/utils/downloads.py
new file mode 100644
index 000000000..8c3028e17
--- /dev/null
+++ b/yolov7_seg/seg/utils/downloads.py
@@ -0,0 +1,180 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Download utils
+"""
+
+import logging
+import os
+import platform
+import subprocess
+import time
+import urllib
+from pathlib import Path
+from zipfile import ZipFile
+
+import requests
+import torch
+
+
+def is_url(url, check_online=True):
+ # Check if online file exists
+ try:
+ url = str(url)
+ result = urllib.parse.urlparse(url)
+ assert all([result.scheme, result.netloc, result.path]) # check if is url
+ return (urllib.request.urlopen(url).getcode() == 200) if check_online else True # check if exists online
+ except (AssertionError, urllib.request.HTTPError):
+ return False
+
+
+def gsutil_getsize(url=''):
+ # gs://bucket/file size https://cloud.google.com/storage/docs/gsutil/commands/du
+ s = subprocess.check_output(f'gsutil du {url}', shell=True).decode('utf-8')
+ return eval(s.split(' ')[0]) if len(s) else 0 # bytes
+
+
+def safe_download(file, url, url2=None, min_bytes=1E0, error_msg=''):
+ # Attempts to download file from url or url2, checks and removes incomplete downloads < min_bytes
+ from utils.general import LOGGER
+
+ file = Path(file)
+ assert_msg = f"Downloaded file '{file}' does not exist or size is < min_bytes={min_bytes}"
+ try: # url1
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, str(file), progress=LOGGER.level <= logging.INFO)
+ assert file.exists() and file.stat().st_size > min_bytes, assert_msg # check
+ except Exception as e: # url2
+ file.unlink(missing_ok=True) # remove partial downloads
+ LOGGER.info(f'ERROR: {e}\nRe-attempting {url2 or url} to {file}...')
+ os.system(f"curl -# -L '{url2 or url}' -o '{file}' --retry 3 -C -") # curl download, retry and resume on fail
+ finally:
+ if not file.exists() or file.stat().st_size < min_bytes: # check
+ file.unlink(missing_ok=True) # remove partial downloads
+ LOGGER.info(f"ERROR: {assert_msg}\n{error_msg}")
+ LOGGER.info('')
+
+
+def attempt_download(file, repo='ultralytics/yolov5', release='v6.2'):
+ # Attempt file download from GitHub release assets if not found locally. release = 'latest', 'v6.2', etc.
+ from utils.general import LOGGER
+
+ def github_assets(repository, version='latest'):
+ # Return GitHub repo tag (i.e. 'v6.2') and assets (i.e. ['yolov5s.pt', 'yolov5m.pt', ...])
+ if version != 'latest':
+ version = f'tags/{version}' # i.e. tags/v6.2
+ response = requests.get(f'https://api.github.com/repos/{repository}/releases/{version}').json() # github api
+ return response['tag_name'], [x['name'] for x in response['assets']] # tag, assets
+
+ file = Path(str(file).strip().replace("'", ''))
+ if not file.exists():
+ # URL specified
+ name = Path(urllib.parse.unquote(str(file))).name # decode '%2F' to '/' etc.
+ if str(file).startswith(('http:/', 'https:/')): # download
+ url = str(file).replace(':/', '://') # Pathlib turns :// -> :/
+ file = name.split('?')[0] # parse authentication https://url.com/file.txt?auth...
+ if Path(file).is_file():
+ LOGGER.info(f'Found {url} locally at {file}') # file already exists
+ else:
+ safe_download(file=file, url=url, min_bytes=1E5)
+ return file
+
+ # GitHub assets
+ assets = [
+ 'yolov5n.pt', 'yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt', 'yolov5n6.pt', 'yolov5s6.pt',
+ 'yolov5m6.pt', 'yolov5l6.pt', 'yolov5x6.pt']
+ try:
+ tag, assets = github_assets(repo, release)
+ except Exception:
+ try:
+ tag, assets = github_assets(repo) # latest release
+ except Exception:
+ try:
+ tag = subprocess.check_output('git tag', shell=True, stderr=subprocess.STDOUT).decode().split()[-1]
+ except Exception:
+ tag = release
+
+ file.parent.mkdir(parents=True, exist_ok=True) # make parent dir (if required)
+ if name in assets:
+ url3 = 'https://drive.google.com/drive/folders/1EFQTEUeXWSFww0luse2jB9M1QNZQGwNl' # backup gdrive mirror
+ safe_download(
+ file,
+ url=f'https://github.com/{repo}/releases/download/{tag}/{name}',
+ url2=f'https://storage.googleapis.com/{repo}/{tag}/{name}', # backup url (optional)
+ min_bytes=1E5,
+ error_msg=f'{file} missing, try downloading from https://github.com/{repo}/releases/{tag} or {url3}')
+
+ return str(file)
+
+
+def gdrive_download(id='16TiPfZj7htmTyhntwcZyEEAejOUxuT6m', file='tmp.zip'):
+ # Downloads a file from Google Drive. from yolov5.utils.downloads import *; gdrive_download()
+ t = time.time()
+ file = Path(file)
+ cookie = Path('cookie') # gdrive cookie
+ print(f'Downloading https://drive.google.com/uc?export=download&id={id} as {file}... ', end='')
+ file.unlink(missing_ok=True) # remove existing file
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Attempt file download
+ out = "NUL" if platform.system() == "Windows" else "/dev/null"
+ os.system(f'curl -c ./cookie -s -L "drive.google.com/uc?export=download&id={id}" > {out}')
+ if os.path.exists('cookie'): # large file
+ s = f'curl -Lb ./cookie "drive.google.com/uc?export=download&confirm={get_token()}&id={id}" -o {file}'
+ else: # small file
+ s = f'curl -s -L -o {file} "drive.google.com/uc?export=download&id={id}"'
+ r = os.system(s) # execute, capture return
+ cookie.unlink(missing_ok=True) # remove existing cookie
+
+ # Error check
+ if r != 0:
+ file.unlink(missing_ok=True) # remove partial
+ print('Download error ') # raise Exception('Download error')
+ return r
+
+ # Unzip if archive
+ if file.suffix == '.zip':
+ print('unzipping... ', end='')
+ ZipFile(file).extractall(path=file.parent) # unzip
+ file.unlink() # remove zip
+
+ print(f'Done ({time.time() - t:.1f}s)')
+ return r
+
+
+def get_token(cookie="./cookie"):
+ with open(cookie) as f:
+ for line in f:
+ if "download" in line:
+ return line.split()[-1]
+ return ""
+
+
+# Google utils: https://cloud.google.com/storage/docs/reference/libraries ----------------------------------------------
+#
+#
+# def upload_blob(bucket_name, source_file_name, destination_blob_name):
+# # Uploads a file to a bucket
+# # https://cloud.google.com/storage/docs/uploading-objects#storage-upload-object-python
+#
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(destination_blob_name)
+#
+# blob.upload_from_filename(source_file_name)
+#
+# print('File {} uploaded to {}.'.format(
+# source_file_name,
+# destination_blob_name))
+#
+#
+# def download_blob(bucket_name, source_blob_name, destination_file_name):
+# # Uploads a blob from a bucket
+# storage_client = storage.Client()
+# bucket = storage_client.get_bucket(bucket_name)
+# blob = bucket.blob(source_blob_name)
+#
+# blob.download_to_filename(destination_file_name)
+#
+# print('Blob {} downloaded to {}.'.format(
+# source_blob_name,
+# destination_file_name))
diff --git a/yolov7_seg/seg/utils/flask_rest_api/README.md b/yolov7_seg/seg/utils/flask_rest_api/README.md
new file mode 100644
index 000000000..9de4da470
--- /dev/null
+++ b/yolov7_seg/seg/utils/flask_rest_api/README.md
@@ -0,0 +1,73 @@
+# Flask REST API
+
+[REST](https://en.wikipedia.org/wiki/Representational_state_transfer) [API](https://en.wikipedia.org/wiki/API)s are
+commonly used to expose Machine Learning (ML) models to other services. This folder contains an example REST API
+created using Flask to expose the YOLOv5s model from [PyTorch Hub](https://pytorch.org/hub/ultralytics_yolov5/).
+
+## Requirements
+
+[Flask](https://palletsprojects.com/p/flask/) is required. Install with:
+
+```shell
+$ pip install Flask
+```
+
+## Run
+
+After Flask installation run:
+
+```shell
+$ python3 restapi.py --port 5000
+```
+
+Then use [curl](https://curl.se/) to perform a request:
+
+```shell
+$ curl -X POST -F image=@zidane.jpg 'http://localhost:5000/v1/object-detection/yolov5s'
+```
+
+The model inference results are returned as a JSON response:
+
+```json
+[
+ {
+ "class": 0,
+ "confidence": 0.8900438547,
+ "height": 0.9318675399,
+ "name": "person",
+ "width": 0.3264600933,
+ "xcenter": 0.7438579798,
+ "ycenter": 0.5207948685
+ },
+ {
+ "class": 0,
+ "confidence": 0.8440024257,
+ "height": 0.7155083418,
+ "name": "person",
+ "width": 0.6546785235,
+ "xcenter": 0.427829951,
+ "ycenter": 0.6334488392
+ },
+ {
+ "class": 27,
+ "confidence": 0.3771208823,
+ "height": 0.3902671337,
+ "name": "tie",
+ "width": 0.0696444362,
+ "xcenter": 0.3675483763,
+ "ycenter": 0.7991207838
+ },
+ {
+ "class": 27,
+ "confidence": 0.3527112305,
+ "height": 0.1540903747,
+ "name": "tie",
+ "width": 0.0336618312,
+ "xcenter": 0.7814827561,
+ "ycenter": 0.5065554976
+ }
+]
+```
+
+An example python script to perform inference using [requests](https://docs.python-requests.org/en/master/) is given
+in `example_request.py`
diff --git a/yolov7_seg/seg/utils/flask_rest_api/example_request.py b/yolov7_seg/seg/utils/flask_rest_api/example_request.py
new file mode 100644
index 000000000..9c898143e
--- /dev/null
+++ b/yolov7_seg/seg/utils/flask_rest_api/example_request.py
@@ -0,0 +1,19 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Perform test request
+"""
+
+import pprint
+
+import requests
+
+DETECTION_URL = "http://localhost:5000/v1/object-detection/yolov5s"
+IMAGE = "zidane.jpg"
+
+# Read image
+with open(IMAGE, "rb") as f:
+ image_data = f.read()
+
+response = requests.post(DETECTION_URL, files={"image": image_data}).json()
+
+pprint.pprint(response)
diff --git a/yolov7_seg/seg/utils/flask_rest_api/restapi.py b/yolov7_seg/seg/utils/flask_rest_api/restapi.py
new file mode 100644
index 000000000..2dbde45ce
--- /dev/null
+++ b/yolov7_seg/seg/utils/flask_rest_api/restapi.py
@@ -0,0 +1,48 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run a Flask REST API exposing one or more YOLOv5s models
+"""
+
+import argparse
+import io
+
+import torch
+from flask import Flask, request
+from PIL import Image
+
+app = Flask(__name__)
+models = {}
+
+DETECTION_URL = "/v1/object-detection/"
+
+
+@app.route(DETECTION_URL, methods=["POST"])
+def predict(model):
+ if request.method != "POST":
+ return
+
+ if request.files.get("image"):
+ # Method 1
+ # with request.files["image"] as f:
+ # im = Image.open(io.BytesIO(f.read()))
+
+ # Method 2
+ im_file = request.files["image"]
+ im_bytes = im_file.read()
+ im = Image.open(io.BytesIO(im_bytes))
+
+ if model in models:
+ results = models[model](im, size=640) # reduce size=320 for faster inference
+ return results.pandas().xyxy[0].to_json(orient="records")
+
+
+if __name__ == "__main__":
+ parser = argparse.ArgumentParser(description="Flask API exposing YOLOv5 model")
+ parser.add_argument("--port", default=5000, type=int, help="port number")
+ parser.add_argument('--model', nargs='+', default=['yolov5s'], help='model(s) to run, i.e. --model yolov5n yolov5s')
+ opt = parser.parse_args()
+
+ for m in opt.model:
+ models[m] = torch.hub.load("ultralytics/yolov5", m, force_reload=True, skip_validation=True)
+
+ app.run(host="0.0.0.0", port=opt.port) # debug=True causes Restarting with stat
diff --git a/yolov7_seg/seg/utils/general.py b/yolov7_seg/seg/utils/general.py
new file mode 100644
index 000000000..bc52347ac
--- /dev/null
+++ b/yolov7_seg/seg/utils/general.py
@@ -0,0 +1,1054 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+General utils
+"""
+
+import contextlib
+import glob
+import inspect
+import logging
+import math
+import os
+import platform
+import random
+import re
+import shutil
+import signal
+import sys
+import time
+import urllib
+from datetime import datetime
+from itertools import repeat
+from multiprocessing.pool import ThreadPool
+from pathlib import Path
+from subprocess import check_output
+from typing import Optional
+from zipfile import ZipFile
+
+import cv2
+import numpy as np
+import pandas as pd
+import pkg_resources as pkg
+import torch
+import torchvision
+import yaml
+
+from utils import TryExcept
+from utils.downloads import gsutil_getsize
+from utils.metrics import box_iou, fitness
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[1] # YOLOv5 root directory
+RANK = int(os.getenv('RANK', -1))
+
+# Settings
+DATASETS_DIR = ROOT.parent / 'datasets' # YOLOv5 datasets directory
+NUM_THREADS = min(8, max(1, os.cpu_count() - 1)) # number of YOLOv5 multiprocessing threads
+AUTOINSTALL = str(os.getenv('YOLOv5_AUTOINSTALL', True)).lower() == 'true' # global auto-install mode
+VERBOSE = str(os.getenv('YOLOv5_VERBOSE', True)).lower() == 'true' # global verbose mode
+FONT = 'Arial.ttf' # https://ultralytics.com/assets/Arial.ttf
+
+torch.set_printoptions(linewidth=320, precision=5, profile='long')
+np.set_printoptions(linewidth=320, formatter={'float_kind': '{:11.5g}'.format}) # format short g, %precision=5
+pd.options.display.max_columns = 10
+cv2.setNumThreads(0) # prevent OpenCV from multithreading (incompatible with PyTorch DataLoader)
+os.environ['NUMEXPR_MAX_THREADS'] = str(NUM_THREADS) # NumExpr max threads
+os.environ['OMP_NUM_THREADS'] = '1' if platform.system() == 'darwin' else str(NUM_THREADS) # OpenMP (PyTorch and SciPy)
+
+
+def is_ascii(s=''):
+ # Is string composed of all ASCII (no UTF) characters? (note str().isascii() introduced in python 3.7)
+ s = str(s) # convert list, tuple, None, etc. to str
+ return len(s.encode().decode('ascii', 'ignore')) == len(s)
+
+
+def is_chinese(s='人工智能'):
+ # Is string composed of any Chinese characters?
+ return bool(re.search('[\u4e00-\u9fff]', str(s)))
+
+
+def is_colab():
+ # Is environment a Google Colab instance?
+ return 'COLAB_GPU' in os.environ
+
+
+def is_kaggle():
+ # Is environment a Kaggle Notebook?
+ return os.environ.get('PWD') == '/kaggle/working' and os.environ.get('KAGGLE_URL_BASE') == 'https://www.kaggle.com'
+
+
+def is_docker() -> bool:
+ """Check if the process runs inside a docker container."""
+ if Path("/.dockerenv").exists():
+ return True
+ try: # check if docker is in control groups
+ with open("/proc/self/cgroup") as file:
+ return any("docker" in line for line in file)
+ except OSError:
+ return False
+
+
+def is_writeable(dir, test=False):
+ # Return True if directory has write permissions, test opening a file with write permissions if test=True
+ if not test:
+ return os.access(dir, os.W_OK) # possible issues on Windows
+ file = Path(dir) / 'tmp.txt'
+ try:
+ with open(file, 'w'): # open file with write permissions
+ pass
+ file.unlink() # remove file
+ return True
+ except OSError:
+ return False
+
+
+def set_logging(name=None, verbose=VERBOSE):
+ # Sets level and returns logger
+ if is_kaggle() or is_colab():
+ for h in logging.root.handlers:
+ logging.root.removeHandler(h) # remove all handlers associated with the root logger object
+ rank = int(os.getenv('RANK', -1)) # rank in world for Multi-GPU trainings
+ level = logging.INFO if verbose and rank in {-1, 0} else logging.ERROR
+ log = logging.getLogger(name)
+ log.setLevel(level)
+ handler = logging.StreamHandler()
+ handler.setFormatter(logging.Formatter("%(message)s"))
+ handler.setLevel(level)
+ log.addHandler(handler)
+
+
+set_logging() # run before defining LOGGER
+LOGGER = logging.getLogger("yolov5") # define globally (used in train.py, val.py, detect.py, etc.)
+if platform.system() == 'Windows':
+ for fn in LOGGER.info, LOGGER.warning:
+ setattr(LOGGER, fn.__name__, lambda x: fn(emojis(x))) # emoji safe logging
+
+
+def user_config_dir(dir='Ultralytics', env_var='YOLOV5_CONFIG_DIR'):
+ # Return path of user configuration directory. Prefer environment variable if exists. Make dir if required.
+ env = os.getenv(env_var)
+ if env:
+ path = Path(env) # use environment variable
+ else:
+ cfg = {'Windows': 'AppData/Roaming', 'Linux': '.config', 'Darwin': 'Library/Application Support'} # 3 OS dirs
+ path = Path.home() / cfg.get(platform.system(), '') # OS-specific config dir
+ path = (path if is_writeable(path) else Path('/tmp')) / dir # GCP and AWS lambda fix, only /tmp is writeable
+ path.mkdir(exist_ok=True) # make if required
+ return path
+
+
+CONFIG_DIR = user_config_dir() # Ultralytics settings dir
+
+
+class Profile(contextlib.ContextDecorator):
+ # YOLOv5 Profile class. Usage: @Profile() decorator or 'with Profile():' context manager
+ def __init__(self, t=0.0):
+ self.t = t
+ self.cuda = torch.cuda.is_available()
+
+ def __enter__(self):
+ self.start = self.time()
+ return self
+
+ def __exit__(self, type, value, traceback):
+ self.dt = self.time() - self.start # delta-time
+ self.t += self.dt # accumulate dt
+
+ def time(self):
+ if self.cuda:
+ torch.cuda.synchronize()
+ return time.time()
+
+
+class Timeout(contextlib.ContextDecorator):
+ # YOLOv5 Timeout class. Usage: @Timeout(seconds) decorator or 'with Timeout(seconds):' context manager
+ def __init__(self, seconds, *, timeout_msg='', suppress_timeout_errors=True):
+ self.seconds = int(seconds)
+ self.timeout_message = timeout_msg
+ self.suppress = bool(suppress_timeout_errors)
+
+ def _timeout_handler(self, signum, frame):
+ raise TimeoutError(self.timeout_message)
+
+ def __enter__(self):
+ if platform.system() != 'Windows': # not supported on Windows
+ signal.signal(signal.SIGALRM, self._timeout_handler) # Set handler for SIGALRM
+ signal.alarm(self.seconds) # start countdown for SIGALRM to be raised
+
+ def __exit__(self, exc_type, exc_val, exc_tb):
+ if platform.system() != 'Windows':
+ signal.alarm(0) # Cancel SIGALRM if it's scheduled
+ if self.suppress and exc_type is TimeoutError: # Suppress TimeoutError
+ return True
+
+
+class WorkingDirectory(contextlib.ContextDecorator):
+ # Usage: @WorkingDirectory(dir) decorator or 'with WorkingDirectory(dir):' context manager
+ def __init__(self, new_dir):
+ self.dir = new_dir # new dir
+ self.cwd = Path.cwd().resolve() # current dir
+
+ def __enter__(self):
+ os.chdir(self.dir)
+
+ def __exit__(self, exc_type, exc_val, exc_tb):
+ os.chdir(self.cwd)
+
+
+def methods(instance):
+ # Get class/instance methods
+ return [f for f in dir(instance) if callable(getattr(instance, f)) and not f.startswith("__")]
+
+
+def print_args(args: Optional[dict] = None, show_file=True, show_func=False):
+ # Print function arguments (optional args dict)
+ x = inspect.currentframe().f_back # previous frame
+ file, _, func, _, _ = inspect.getframeinfo(x)
+ if args is None: # get args automatically
+ args, _, _, frm = inspect.getargvalues(x)
+ args = {k: v for k, v in frm.items() if k in args}
+ try:
+ file = Path(file).resolve().relative_to(ROOT).with_suffix('')
+ except ValueError:
+ file = Path(file).stem
+ s = (f'{file}: ' if show_file else '') + (f'{func}: ' if show_func else '')
+ LOGGER.info(colorstr(s) + ', '.join(f'{k}={v}' for k, v in args.items()))
+
+
+def init_seeds(seed=0, deterministic=False):
+ # Initialize random number generator (RNG) seeds https://pytorch.org/docs/stable/notes/randomness.html
+ # cudnn seed 0 settings are slower and more reproducible, else faster and less reproducible
+ import torch.backends.cudnn as cudnn
+
+ if deterministic and check_version(torch.__version__, '1.12.0'): # https://github.com/ultralytics/yolov5/pull/8213
+ torch.use_deterministic_algorithms(True)
+ os.environ['CUBLAS_WORKSPACE_CONFIG'] = ':4096:8'
+ os.environ['PYTHONHASHSEED'] = str(seed)
+
+ random.seed(seed)
+ np.random.seed(seed)
+ torch.manual_seed(seed)
+ cudnn.benchmark, cudnn.deterministic = (False, True) if seed == 0 else (True, False)
+ torch.cuda.manual_seed(seed)
+ torch.cuda.manual_seed_all(seed) # for Multi-GPU, exception safe
+
+
+def intersect_dicts(da, db, exclude=()):
+ # Dictionary intersection of matching keys and shapes, omitting 'exclude' keys, using da values
+ return {k: v for k, v in da.items() if k in db and all(x not in k for x in exclude) and v.shape == db[k].shape}
+
+
+def get_default_args(func):
+ # Get func() default arguments
+ signature = inspect.signature(func)
+ return {k: v.default for k, v in signature.parameters.items() if v.default is not inspect.Parameter.empty}
+
+
+def get_latest_run(search_dir='.'):
+ # Return path to most recent 'last.pt' in /runs (i.e. to --resume from)
+ last_list = glob.glob(f'{search_dir}/**/last*.pt', recursive=True)
+ return max(last_list, key=os.path.getctime) if last_list else ''
+
+
+def emojis(str=''):
+ # Return platform-dependent emoji-safe version of string
+ return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
+
+
+def file_age(path=__file__):
+ # Return days since last file update
+ dt = (datetime.now() - datetime.fromtimestamp(Path(path).stat().st_mtime)) # delta
+ return dt.days # + dt.seconds / 86400 # fractional days
+
+
+def file_date(path=__file__):
+ # Return human-readable file modification date, i.e. '2021-3-26'
+ t = datetime.fromtimestamp(Path(path).stat().st_mtime)
+ return f'{t.year}-{t.month}-{t.day}'
+
+
+def file_size(path):
+ # Return file/dir size (MB)
+ mb = 1 << 20 # bytes to MiB (1024 ** 2)
+ path = Path(path)
+ if path.is_file():
+ return path.stat().st_size / mb
+ elif path.is_dir():
+ return sum(f.stat().st_size for f in path.glob('**/*') if f.is_file()) / mb
+ else:
+ return 0.0
+
+
+def check_online():
+ # Check internet connectivity
+ import socket
+ try:
+ socket.create_connection(("1.1.1.1", 443), 5) # check host accessibility
+ return True
+ except OSError:
+ return False
+
+
+def git_describe(path=ROOT): # path must be a directory
+ # Return human-readable git description, i.e. v5.0-5-g3e25f1e https://git-scm.com/docs/git-describe
+ try:
+ assert (Path(path) / '.git').is_dir()
+ return check_output(f'git -C {path} describe --tags --long --always', shell=True).decode()[:-1]
+ except Exception:
+ return ''
+
+
+@TryExcept()
+@WorkingDirectory(ROOT)
+def check_git_status(repo='ultralytics/yolov5'):
+ # YOLOv5 status check, recommend 'git pull' if code is out of date
+ url = f'https://github.com/{repo}'
+ msg = f', for updates see {url}'
+ s = colorstr('github: ') # string
+ assert Path('.git').exists(), s + 'skipping check (not a git repository)' + msg
+ assert check_online(), s + 'skipping check (offline)' + msg
+
+ splits = re.split(pattern=r'\s', string=check_output('git remote -v', shell=True).decode())
+ matches = [repo in s for s in splits]
+ if any(matches):
+ remote = splits[matches.index(True) - 1]
+ else:
+ remote = 'ultralytics'
+ check_output(f'git remote add {remote} {url}', shell=True)
+ check_output(f'git fetch {remote}', shell=True, timeout=5) # git fetch
+ branch = check_output('git rev-parse --abbrev-ref HEAD', shell=True).decode().strip() # checked out
+ n = int(check_output(f'git rev-list {branch}..{remote}/master --count', shell=True)) # commits behind
+ if n > 0:
+ pull = 'git pull' if remote == 'origin' else f'git pull {remote} master'
+ s += f"⚠️ YOLOv5 is out of date by {n} commit{'s' * (n > 1)}. Use `{pull}` or `git clone {url}` to update."
+ else:
+ s += f'up to date with {url} ✅'
+ LOGGER.info(s)
+
+
+def check_python(minimum='3.7.0'):
+ # Check current python version vs. required python version
+ check_version(platform.python_version(), minimum, name='Python ', hard=True)
+
+
+def check_version(current='0.0.0', minimum='0.0.0', name='version ', pinned=False, hard=False, verbose=False):
+ # Check version vs. required version
+ current, minimum = (pkg.parse_version(x) for x in (current, minimum))
+ result = (current == minimum) if pinned else (current >= minimum) # bool
+ s = f'{name}{minimum} required by YOLOv5, but {name}{current} is currently installed' # string
+ if hard:
+ assert result, s # assert min requirements met
+ if verbose and not result:
+ LOGGER.warning(s)
+ return result
+
+
+@TryExcept()
+def check_requirements(requirements=ROOT / 'requirements.txt', exclude=(), install=True, cmds=()):
+ # Check installed dependencies meet YOLOv5 requirements (pass *.txt file or list of packages)
+ prefix = colorstr('red', 'bold', 'requirements:')
+ check_python() # check python version
+ if isinstance(requirements, (str, Path)): # requirements.txt file
+ file = Path(requirements)
+ assert file.exists(), f"{prefix} {file.resolve()} not found, check failed."
+ with file.open() as f:
+ requirements = [f'{x.name}{x.specifier}' for x in pkg.parse_requirements(f) if x.name not in exclude]
+ else: # list or tuple of packages
+ requirements = [x for x in requirements if x not in exclude]
+
+ n = 0 # number of packages updates
+ for i, r in enumerate(requirements):
+ try:
+ pkg.require(r)
+ except Exception: # DistributionNotFound or VersionConflict if requirements not met
+ s = f"{prefix} {r} not found and is required by YOLOv5"
+ if install and AUTOINSTALL: # check environment variable
+ LOGGER.info(f"{s}, attempting auto-update...")
+ try:
+ assert check_online(), f"'pip install {r}' skipped (offline)"
+ LOGGER.info(check_output(f'pip install "{r}" {cmds[i] if cmds else ""}', shell=True).decode())
+ n += 1
+ except Exception as e:
+ LOGGER.warning(f'{prefix} {e}')
+ else:
+ LOGGER.info(f'{s}. Please install and rerun your command.')
+
+ if n: # if packages updated
+ source = file.resolve() if 'file' in locals() else requirements
+ s = f"{prefix} {n} package{'s' * (n > 1)} updated per {source}\n" \
+ f"{prefix} ⚠️ {colorstr('bold', 'Restart runtime or rerun command for updates to take effect')}\n"
+ LOGGER.info(s)
+
+
+def check_img_size(imgsz, s=32, floor=0):
+ # Verify image size is a multiple of stride s in each dimension
+ if isinstance(imgsz, int): # integer i.e. img_size=640
+ new_size = max(make_divisible(imgsz, int(s)), floor)
+ else: # list i.e. img_size=[640, 480]
+ imgsz = list(imgsz) # convert to list if tuple
+ new_size = [max(make_divisible(x, int(s)), floor) for x in imgsz]
+ if new_size != imgsz:
+ LOGGER.warning(f'WARNING: --img-size {imgsz} must be multiple of max stride {s}, updating to {new_size}')
+ return new_size
+
+
+def check_imshow():
+ # Check if environment supports image displays
+ try:
+ assert not is_docker(), 'cv2.imshow() is disabled in Docker environments'
+ assert not is_colab(), 'cv2.imshow() is disabled in Google Colab environments'
+ cv2.imshow('test', np.zeros((1, 1, 3)))
+ cv2.waitKey(1)
+ cv2.destroyAllWindows()
+ cv2.waitKey(1)
+ return True
+ except Exception as e:
+ LOGGER.warning(f'WARNING: Environment does not support cv2.imshow() or PIL Image.show() image displays\n{e}')
+ return False
+
+
+def check_suffix(file='yolov5s.pt', suffix=('.pt',), msg=''):
+ # Check file(s) for acceptable suffix
+ if file and suffix:
+ if isinstance(suffix, str):
+ suffix = [suffix]
+ for f in file if isinstance(file, (list, tuple)) else [file]:
+ s = Path(f).suffix.lower() # file suffix
+ if len(s):
+ assert s in suffix, f"{msg}{f} acceptable suffix is {suffix}"
+
+
+def check_yaml(file, suffix=('.yaml', '.yml')):
+ # Search/download YAML file (if necessary) and return path, checking suffix
+ return check_file(file, suffix)
+
+
+def check_file(file, suffix=''):
+ # Search/download file (if necessary) and return path
+ check_suffix(file, suffix) # optional
+ file = str(file) # convert to str()
+ if Path(file).is_file() or not file: # exists
+ return file
+ elif file.startswith(('http:/', 'https:/')): # download
+ url = file # warning: Pathlib turns :// -> :/
+ file = Path(urllib.parse.unquote(file).split('?')[0]).name # '%2F' to '/', split https://url.com/file.txt?auth
+ if Path(file).is_file():
+ LOGGER.info(f'Found {url} locally at {file}') # file already exists
+ else:
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, file)
+ assert Path(file).exists() and Path(file).stat().st_size > 0, f'File download failed: {url}' # check
+ return file
+ elif file.startswith('clearml://'): # ClearML Dataset ID
+ assert 'clearml' in sys.modules, "ClearML is not installed, so cannot use ClearML dataset. Try running 'pip install clearml'."
+ return file
+ else: # search
+ files = []
+ for d in 'data', 'models', 'utils': # search directories
+ files.extend(glob.glob(str(ROOT / d / '**' / file), recursive=True)) # find file
+ assert len(files), f'File not found: {file}' # assert file was found
+ assert len(files) == 1, f"Multiple files match '{file}', specify exact path: {files}" # assert unique
+ return files[0] # return file
+
+
+def check_font(font=FONT, progress=False):
+ # Download font to CONFIG_DIR if necessary
+ font = Path(font)
+ file = CONFIG_DIR / font.name
+ if not font.exists() and not file.exists():
+ url = "https://ultralytics.com/assets/" + font.name
+ LOGGER.info(f'Downloading {url} to {file}...')
+ torch.hub.download_url_to_file(url, str(file), progress=progress)
+
+
+def check_dataset(data, autodownload=True):
+ # Download, check and/or unzip dataset if not found locally
+
+ # Download (optional)
+ extract_dir = ''
+ if isinstance(data, (str, Path)) and str(data).endswith('.zip'): # i.e. gs://bucket/dir/coco128.zip
+ download(data, dir=f'{DATASETS_DIR}/{Path(data).stem}', unzip=True, delete=False, curl=False, threads=1)
+ data = next((DATASETS_DIR / Path(data).stem).rglob('*.yaml'))
+ extract_dir, autodownload = data.parent, False
+
+ # Read yaml (optional)
+ if isinstance(data, (str, Path)):
+ with open(data, errors='ignore') as f:
+ data = yaml.safe_load(f) # dictionary
+
+ # Checks
+ for k in 'train', 'val', 'names':
+ assert k in data, f"data.yaml '{k}:' field missing ❌"
+ if isinstance(data['names'], (list, tuple)): # old array format
+ data['names'] = dict(enumerate(data['names'])) # convert to dict
+ data['nc'] = len(data['names'])
+
+ # Resolve paths
+ path = Path(extract_dir or data.get('path') or '') # optional 'path' default to '.'
+ if not path.is_absolute():
+ path = (ROOT / path).resolve()
+ for k in 'train', 'val', 'test':
+ if data.get(k): # prepend path
+ data[k] = str(path / data[k]) if isinstance(data[k], str) else [str(path / x) for x in data[k]]
+
+ # Parse yaml
+ train, val, test, s = (data.get(x) for x in ('train', 'val', 'test', 'download'))
+ if val:
+ val = [Path(x).resolve() for x in (val if isinstance(val, list) else [val])] # val path
+ if not all(x.exists() for x in val):
+ LOGGER.info('\nDataset not found ⚠️, missing paths %s' % [str(x) for x in val if not x.exists()])
+ if not s or not autodownload:
+ raise Exception('Dataset not found ❌')
+ t = time.time()
+ root = path.parent if 'path' in data else '..' # unzip directory i.e. '../'
+ if s.startswith('http') and s.endswith('.zip'): # URL
+ f = Path(s).name # filename
+ LOGGER.info(f'Downloading {s} to {f}...')
+ torch.hub.download_url_to_file(s, f)
+ Path(root).mkdir(parents=True, exist_ok=True) # create root
+ ZipFile(f).extractall(path=root) # unzip
+ Path(f).unlink() # remove zip
+ r = None # success
+ elif s.startswith('bash '): # bash script
+ LOGGER.info(f'Running {s} ...')
+ r = os.system(s)
+ else: # python script
+ r = exec(s, {'yaml': data}) # return None
+ dt = f'({round(time.time() - t, 1)}s)'
+ s = f"success ✅ {dt}, saved to {colorstr('bold', root)}" if r in (0, None) else f"failure {dt} ❌"
+ LOGGER.info(f"Dataset download {s}")
+ check_font('Arial.ttf' if is_ascii(data['names']) else 'Arial.Unicode.ttf', progress=True) # download fonts
+ return data # dictionary
+
+
+def check_amp(model):
+ # Check PyTorch Automatic Mixed Precision (AMP) functionality. Return True on correct operation
+ from models.common import AutoShape, DetectMultiBackend
+
+ def amp_allclose(model, im):
+ # All close FP32 vs AMP results
+ m = AutoShape(model, verbose=False) # model
+ a = m(im).xywhn[0] # FP32 inference
+ m.amp = True
+ b = m(im).xywhn[0] # AMP inference
+ return a.shape == b.shape and torch.allclose(a, b, atol=0.1) # close to 10% absolute tolerance
+
+ prefix = colorstr('AMP: ')
+ device = next(model.parameters()).device # get model device
+ if device.type == 'cpu':
+ return False # AMP disabled on CPU
+ f = ROOT / 'data' / 'images' / 'bus.jpg' # image to check
+ im = f if f.exists() else 'https://ultralytics.com/images/bus.jpg' if check_online() else np.ones((640, 640, 3))
+ try:
+ assert amp_allclose(model, im) or amp_allclose(DetectMultiBackend('yolov5n.pt', device), im)
+ LOGGER.info(f'{prefix}checks passed ✅')
+ return True
+ except Exception:
+ help_url = 'https://github.com/ultralytics/yolov5/issues/7908'
+ LOGGER.warning(f'{prefix}checks failed ❌, disabling Automatic Mixed Precision. See {help_url}')
+ return False
+
+
+def yaml_load(file='data.yaml'):
+ # Single-line safe yaml loading
+ with open(file, errors='ignore') as f:
+ return yaml.safe_load(f)
+
+
+def yaml_save(file='data.yaml', data={}):
+ # Single-line safe yaml saving
+ with open(file, 'w') as f:
+ yaml.safe_dump({k: str(v) if isinstance(v, Path) else v for k, v in data.items()}, f, sort_keys=False)
+
+
+def url2file(url):
+ # Convert URL to filename, i.e. https://url.com/file.txt?auth -> file.txt
+ url = str(Path(url)).replace(':/', '://') # Pathlib turns :// -> :/
+ return Path(urllib.parse.unquote(url)).name.split('?')[0] # '%2F' to '/', split https://url.com/file.txt?auth
+
+
+def download(url, dir='.', unzip=True, delete=True, curl=False, threads=1, retry=3):
+ # Multithreaded file download and unzip function, used in data.yaml for autodownload
+ def download_one(url, dir):
+ # Download 1 file
+ success = True
+ f = dir / Path(url).name # filename
+ if Path(url).is_file(): # exists in current path
+ Path(url).rename(f) # move to dir
+ elif not f.exists():
+ LOGGER.info(f'Downloading {url} to {f}...')
+ for i in range(retry + 1):
+ if curl:
+ s = 'sS' if threads > 1 else '' # silent
+ r = os.system(
+ f'curl -# -{s}L "{url}" -o "{f}" --retry 9 -C -') # curl download with retry, continue
+ success = r == 0
+ else:
+ torch.hub.download_url_to_file(url, f, progress=threads == 1) # torch download
+ success = f.is_file()
+ if success:
+ break
+ elif i < retry:
+ LOGGER.warning(f'Download failure, retrying {i + 1}/{retry} {url}...')
+ else:
+ LOGGER.warning(f'Failed to download {url}...')
+
+ if unzip and success and f.suffix in ('.zip', '.tar', '.gz'):
+ LOGGER.info(f'Unzipping {f}...')
+ if f.suffix == '.zip':
+ ZipFile(f).extractall(path=dir) # unzip
+ elif f.suffix == '.tar':
+ os.system(f'tar xf {f} --directory {f.parent}') # unzip
+ elif f.suffix == '.gz':
+ os.system(f'tar xfz {f} --directory {f.parent}') # unzip
+ if delete:
+ f.unlink() # remove zip
+
+ dir = Path(dir)
+ dir.mkdir(parents=True, exist_ok=True) # make directory
+ if threads > 1:
+ pool = ThreadPool(threads)
+ pool.imap(lambda x: download_one(*x), zip(url, repeat(dir))) # multithreaded
+ pool.close()
+ pool.join()
+ else:
+ for u in [url] if isinstance(url, (str, Path)) else url:
+ download_one(u, dir)
+
+
+def make_divisible(x, divisor):
+ # Returns nearest x divisible by divisor
+ if isinstance(divisor, torch.Tensor):
+ divisor = int(divisor.max()) # to int
+ return math.ceil(x / divisor) * divisor
+
+
+def clean_str(s):
+ # Cleans a string by replacing special characters with underscore _
+ return re.sub(pattern="[|@#!¡·$€%&()=?¿^*;:,¨´><+]", repl="_", string=s)
+
+
+def one_cycle(y1=0.0, y2=1.0, steps=100):
+ # lambda function for sinusoidal ramp from y1 to y2 https://arxiv.org/pdf/1812.01187.pdf
+ return lambda x: ((1 - math.cos(x * math.pi / steps)) / 2) * (y2 - y1) + y1
+
+
+def colorstr(*input):
+ # Colors a string https://en.wikipedia.org/wiki/ANSI_escape_code, i.e. colorstr('blue', 'hello world')
+ *args, string = input if len(input) > 1 else ('blue', 'bold', input[0]) # color arguments, string
+ colors = {
+ 'black': '\033[30m', # basic colors
+ 'red': '\033[31m',
+ 'green': '\033[32m',
+ 'yellow': '\033[33m',
+ 'blue': '\033[34m',
+ 'magenta': '\033[35m',
+ 'cyan': '\033[36m',
+ 'white': '\033[37m',
+ 'bright_black': '\033[90m', # bright colors
+ 'bright_red': '\033[91m',
+ 'bright_green': '\033[92m',
+ 'bright_yellow': '\033[93m',
+ 'bright_blue': '\033[94m',
+ 'bright_magenta': '\033[95m',
+ 'bright_cyan': '\033[96m',
+ 'bright_white': '\033[97m',
+ 'end': '\033[0m', # misc
+ 'bold': '\033[1m',
+ 'underline': '\033[4m'}
+ return ''.join(colors[x] for x in args) + f'{string}' + colors['end']
+
+
+def labels_to_class_weights(labels, nc=80):
+ # Get class weights (inverse frequency) from training labels
+ if labels[0] is None: # no labels loaded
+ return torch.Tensor()
+
+ labels = np.concatenate(labels, 0) # labels.shape = (866643, 5) for COCO
+ classes = labels[:, 0].astype(int) # labels = [class xywh]
+ weights = np.bincount(classes, minlength=nc) # occurrences per class
+
+ # Prepend gridpoint count (for uCE training)
+ # gpi = ((320 / 32 * np.array([1, 2, 4])) ** 2 * 3).sum() # gridpoints per image
+ # weights = np.hstack([gpi * len(labels) - weights.sum() * 9, weights * 9]) ** 0.5 # prepend gridpoints to start
+
+ weights[weights == 0] = 1 # replace empty bins with 1
+ weights = 1 / weights # number of targets per class
+ weights /= weights.sum() # normalize
+ return torch.from_numpy(weights).float()
+
+
+def labels_to_image_weights(labels, nc=80, class_weights=np.ones(80)):
+ # Produces image weights based on class_weights and image contents
+ # Usage: index = random.choices(range(n), weights=image_weights, k=1) # weighted image sample
+ class_counts = np.array([np.bincount(x[:, 0].astype(int), minlength=nc) for x in labels])
+ return (class_weights.reshape(1, nc) * class_counts).sum(1)
+
+
+def coco80_to_coco91_class(): # converts 80-index (val2014) to 91-index (paper)
+ # https://tech.amikelive.com/node-718/what-object-categories-labels-are-in-coco-dataset/
+ # a = np.loadtxt('data/coco.names', dtype='str', delimiter='\n')
+ # b = np.loadtxt('data/coco_paper.names', dtype='str', delimiter='\n')
+ # x1 = [list(a[i] == b).index(True) + 1 for i in range(80)] # darknet to coco
+ # x2 = [list(b[i] == a).index(True) if any(b[i] == a) else None for i in range(91)] # coco to darknet
+ return [
+ 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 27, 28, 31, 32, 33, 34,
+ 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63,
+ 64, 65, 67, 70, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 84, 85, 86, 87, 88, 89, 90]
+
+
+def xyxy2xywh(x):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = (x[:, 0] + x[:, 2]) / 2 # x center
+ y[:, 1] = (x[:, 1] + x[:, 3]) / 2 # y center
+ y[:, 2] = x[:, 2] - x[:, 0] # width
+ y[:, 3] = x[:, 3] - x[:, 1] # height
+ return y
+
+
+def xywh2xyxy(x):
+ # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
+ y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
+ y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
+ y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
+ return y
+
+
+def xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):
+ # Convert nx4 boxes from [x, y, w, h] normalized to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * (x[:, 0] - x[:, 2] / 2) + padw # top left x
+ y[:, 1] = h * (x[:, 1] - x[:, 3] / 2) + padh # top left y
+ y[:, 2] = w * (x[:, 0] + x[:, 2] / 2) + padw # bottom right x
+ y[:, 3] = h * (x[:, 1] + x[:, 3] / 2) + padh # bottom right y
+ return y
+
+
+def xyxy2xywhn(x, w=640, h=640, clip=False, eps=0.0):
+ # Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] normalized where xy1=top-left, xy2=bottom-right
+ if clip:
+ clip_coords(x, (h - eps, w - eps)) # warning: inplace clip
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = ((x[:, 0] + x[:, 2]) / 2) / w # x center
+ y[:, 1] = ((x[:, 1] + x[:, 3]) / 2) / h # y center
+ y[:, 2] = (x[:, 2] - x[:, 0]) / w # width
+ y[:, 3] = (x[:, 3] - x[:, 1]) / h # height
+ return y
+
+
+def xyn2xy(x, w=640, h=640, padw=0, padh=0):
+ # Convert normalized segments into pixel segments, shape (n,2)
+ y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
+ y[:, 0] = w * x[:, 0] + padw # top left x
+ y[:, 1] = h * x[:, 1] + padh # top left y
+ return y
+
+
+def segment2box(segment, width=640, height=640):
+ # Convert 1 segment label to 1 box label, applying inside-image constraint, i.e. (xy1, xy2, ...) to (xyxy)
+ x, y = segment.T # segment xy
+ inside = (x >= 0) & (y >= 0) & (x <= width) & (y <= height)
+ x, y, = x[inside], y[inside]
+ return np.array([x.min(), y.min(), x.max(), y.max()]) if any(x) else np.zeros((1, 4)) # xyxy
+
+
+def segments2boxes(segments):
+ # Convert segment labels to box labels, i.e. (cls, xy1, xy2, ...) to (cls, xywh)
+ boxes = []
+ for s in segments:
+ x, y = s.T # segment xy
+ boxes.append([x.min(), y.min(), x.max(), y.max()]) # cls, xyxy
+ return xyxy2xywh(np.array(boxes)) # cls, xywh
+
+
+def resample_segments(segments, n=1000):
+ # Up-sample an (n,2) segment
+ for i, s in enumerate(segments):
+ s = np.concatenate((s, s[0:1, :]), axis=0)
+ x = np.linspace(0, len(s) - 1, n)
+ xp = np.arange(len(s))
+ segments[i] = np.concatenate([np.interp(x, xp, s[:, i]) for i in range(2)]).reshape(2, -1).T # segment xy
+ return segments
+
+
+def scale_coords(img1_shape, coords, img0_shape, ratio_pad=None):
+ # Rescale coords (xyxy) from img1_shape to img0_shape
+ if ratio_pad is None: # calculate from img0_shape
+ gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
+ pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
+ else:
+ gain = ratio_pad[0][0]
+ pad = ratio_pad[1]
+
+ coords[:, [0, 2]] -= pad[0] # x padding
+ coords[:, [1, 3]] -= pad[1] # y padding
+ coords[:, :4] /= gain
+ clip_coords(coords, img0_shape)
+ return coords
+
+
+def clip_coords(boxes, shape):
+ # Clip bounding xyxy bounding boxes to image shape (height, width)
+ if isinstance(boxes, torch.Tensor): # faster individually
+ boxes[:, 0].clamp_(0, shape[1]) # x1
+ boxes[:, 1].clamp_(0, shape[0]) # y1
+ boxes[:, 2].clamp_(0, shape[1]) # x2
+ boxes[:, 3].clamp_(0, shape[0]) # y2
+ else: # np.array (faster grouped)
+ boxes[:, [0, 2]] = boxes[:, [0, 2]].clip(0, shape[1]) # x1, x2
+ boxes[:, [1, 3]] = boxes[:, [1, 3]].clip(0, shape[0]) # y1, y2
+
+
+def non_max_suppression(
+ prediction,
+ conf_thres=0.25,
+ iou_thres=0.45,
+ classes=None,
+ agnostic=False,
+ multi_label=False,
+ labels=(),
+ max_det=300,
+ nm=0, # number of masks
+):
+ """Non-Maximum Suppression (NMS) on inference results to reject overlapping detections
+
+ Returns:
+ list of detections, on (n,6) tensor per image [xyxy, conf, cls]
+ """
+
+ bs = prediction.shape[0] # batch size
+ nc = prediction.shape[2] - nm - 5 # number of classes
+ xc = prediction[..., 4] > conf_thres # candidates
+
+ # Checks
+ assert 0 <= conf_thres <= 1, f'Invalid Confidence threshold {conf_thres}, valid values are between 0.0 and 1.0'
+ assert 0 <= iou_thres <= 1, f'Invalid IoU {iou_thres}, valid values are between 0.0 and 1.0'
+
+ # Settings
+ # min_wh = 2 # (pixels) minimum box width and height
+ max_wh = 7680 # (pixels) maximum box width and height
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
+ time_limit = 0.5 + 0.05 * bs # seconds to quit after
+ redundant = True # require redundant detections
+ multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
+ merge = False # use merge-NMS
+
+ t = time.time()
+ mi = 5 + nc # mask start index
+ output = [torch.zeros((0, 6 + nm), device=prediction.device)] * bs
+ for xi, x in enumerate(prediction): # image index, image inference
+ # Apply constraints
+ # x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
+ x = x[xc[xi]] # confidence
+
+ # Cat apriori labels if autolabelling
+ if labels and len(labels[xi]):
+ lb = labels[xi]
+ v = torch.zeros((len(lb), nc + nm + 5), device=x.device)
+ v[:, :4] = lb[:, 1:5] # box
+ v[:, 4] = 1.0 # conf
+ v[range(len(lb)), lb[:, 0].long() + 5] = 1.0 # cls
+ x = torch.cat((x, v), 0)
+
+ # If none remain process next image
+ if not x.shape[0]:
+ continue
+
+ # Compute conf
+ x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
+
+ # Box/Mask
+ box = xywh2xyxy(x[:, :4]) # center_x, center_y, width, height) to (x1, y1, x2, y2)
+ mask = x[:, mi:] # zero columns if no masks
+
+ # Detections matrix nx6 (xyxy, conf, cls)
+ if multi_label:
+ i, j = (x[:, 5:mi] > conf_thres).nonzero(as_tuple=False).T
+ x = torch.cat((box[i], x[i, 5 + j, None], j[:, None].float(), mask[i]), 1)
+ else: # best class only
+ conf, j = x[:, 5:mi].max(1, keepdim=True)
+ x = torch.cat((box, conf, j.float(), mask), 1)[conf.view(-1) > conf_thres]
+
+ # Filter by class
+ if classes is not None:
+ x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
+
+ # Apply finite constraint
+ # if not torch.isfinite(x).all():
+ # x = x[torch.isfinite(x).all(1)]
+
+ # Check shape
+ n = x.shape[0] # number of boxes
+ if not n: # no boxes
+ continue
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
+ else:
+ x = x[x[:, 4].argsort(descending=True)] # sort by confidence
+
+ # Batched NMS
+ c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
+ boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
+ i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
+ if i.shape[0] > max_det: # limit detections
+ i = i[:max_det]
+ if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
+ # update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
+ iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
+ weights = iou * scores[None] # box weights
+ x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
+ if redundant:
+ i = i[iou.sum(1) > 1] # require redundancy
+
+ output[xi] = x[i]
+ if (time.time() - t) > time_limit:
+ LOGGER.warning(f'WARNING: NMS time limit {time_limit:.3f}s exceeded')
+ break # time limit exceeded
+
+ return output
+
+
+def strip_optimizer(f='best.pt', s=''): # from utils.general import *; strip_optimizer()
+ # Strip optimizer from 'f' to finalize training, optionally save as 's'
+ x = torch.load(f, map_location=torch.device('cpu'))
+ if x.get('ema'):
+ x['model'] = x['ema'] # replace model with ema
+ for k in 'optimizer', 'best_fitness', 'wandb_id', 'ema', 'updates': # keys
+ x[k] = None
+ x['epoch'] = -1
+ x['model'].half() # to FP16
+ for p in x['model'].parameters():
+ p.requires_grad = False
+ torch.save(x, s or f)
+ mb = os.path.getsize(s or f) / 1E6 # filesize
+ LOGGER.info(f"Optimizer stripped from {f},{f' saved as {s},' if s else ''} {mb:.1f}MB")
+
+
+def print_mutation(results, hyp, save_dir, bucket, prefix=colorstr('evolve: ')):
+ evolve_csv = save_dir / 'evolve.csv'
+ evolve_yaml = save_dir / 'hyp_evolve.yaml'
+ keys = ('metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/mAP_0.5:0.95', 'val/box_loss',
+ 'val/obj_loss', 'val/cls_loss') + tuple(hyp.keys()) # [results + hyps]
+ keys = tuple(x.strip() for x in keys)
+ vals = results + tuple(hyp.values())
+ n = len(keys)
+
+ # Download (optional)
+ if bucket:
+ url = f'gs://{bucket}/evolve.csv'
+ if gsutil_getsize(url) > (evolve_csv.stat().st_size if evolve_csv.exists() else 0):
+ os.system(f'gsutil cp {url} {save_dir}') # download evolve.csv if larger than local
+
+ # Log to evolve.csv
+ s = '' if evolve_csv.exists() else (('%20s,' * n % keys).rstrip(',') + '\n') # add header
+ with open(evolve_csv, 'a') as f:
+ f.write(s + ('%20.5g,' * n % vals).rstrip(',') + '\n')
+
+ # Save yaml
+ with open(evolve_yaml, 'w') as f:
+ data = pd.read_csv(evolve_csv)
+ data = data.rename(columns=lambda x: x.strip()) # strip keys
+ i = np.argmax(fitness(data.values[:, :4])) #
+ generations = len(data)
+ f.write('# YOLOv5 Hyperparameter Evolution Results\n' + f'# Best generation: {i}\n' +
+ f'# Last generation: {generations - 1}\n' + '# ' + ', '.join(f'{x.strip():>20s}' for x in keys[:7]) +
+ '\n' + '# ' + ', '.join(f'{x:>20.5g}' for x in data.values[i, :7]) + '\n\n')
+ yaml.safe_dump(data.loc[i][7:].to_dict(), f, sort_keys=False)
+
+ # Print to screen
+ LOGGER.info(prefix + f'{generations} generations finished, current result:\n' + prefix +
+ ', '.join(f'{x.strip():>20s}' for x in keys) + '\n' + prefix + ', '.join(f'{x:20.5g}'
+ for x in vals) + '\n\n')
+
+ if bucket:
+ os.system(f'gsutil cp {evolve_csv} {evolve_yaml} gs://{bucket}') # upload
+
+
+def apply_classifier(x, model, img, im0):
+ # Apply a second stage classifier to YOLO outputs
+ # Example model = torchvision.models.__dict__['efficientnet_b0'](pretrained=True).to(device).eval()
+ im0 = [im0] if isinstance(im0, np.ndarray) else im0
+ for i, d in enumerate(x): # per image
+ if d is not None and len(d):
+ d = d.clone()
+
+ # Reshape and pad cutouts
+ b = xyxy2xywh(d[:, :4]) # boxes
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # rectangle to square
+ b[:, 2:] = b[:, 2:] * 1.3 + 30 # pad
+ d[:, :4] = xywh2xyxy(b).long()
+
+ # Rescale boxes from img_size to im0 size
+ scale_coords(img.shape[2:], d[:, :4], im0[i].shape)
+
+ # Classes
+ pred_cls1 = d[:, 5].long()
+ ims = []
+ for a in d:
+ cutout = im0[i][int(a[1]):int(a[3]), int(a[0]):int(a[2])]
+ im = cv2.resize(cutout, (224, 224)) # BGR
+
+ im = im[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
+ im = np.ascontiguousarray(im, dtype=np.float32) # uint8 to float32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ ims.append(im)
+
+ pred_cls2 = model(torch.Tensor(ims).to(d.device)).argmax(1) # classifier prediction
+ x[i] = x[i][pred_cls1 == pred_cls2] # retain matching class detections
+
+ return x
+
+
+def increment_path(path, exist_ok=False, sep='', mkdir=False):
+ # Increment file or directory path, i.e. runs/exp --> runs/exp{sep}2, runs/exp{sep}3, ... etc.
+ path = Path(path) # os-agnostic
+ if path.exists() and not exist_ok:
+ path, suffix = (path.with_suffix(''), path.suffix) if path.is_file() else (path, '')
+
+ # Method 1
+ for n in range(2, 9999):
+ p = f'{path}{sep}{n}{suffix}' # increment path
+ if not os.path.exists(p): #
+ break
+ path = Path(p)
+
+ # Method 2 (deprecated)
+ # dirs = glob.glob(f"{path}{sep}*") # similar paths
+ # matches = [re.search(rf"{path.stem}{sep}(\d+)", d) for d in dirs]
+ # i = [int(m.groups()[0]) for m in matches if m] # indices
+ # n = max(i) + 1 if i else 2 # increment number
+ # path = Path(f"{path}{sep}{n}{suffix}") # increment path
+
+ if mkdir:
+ path.mkdir(parents=True, exist_ok=True) # make directory
+
+ return path
+
+
+# OpenCV Chinese-friendly functions ------------------------------------------------------------------------------------
+imshow_ = cv2.imshow # copy to avoid recursion errors
+
+
+def imread(path, flags=cv2.IMREAD_COLOR):
+ return cv2.imdecode(np.fromfile(path, np.uint8), flags)
+
+
+def imwrite(path, im):
+ try:
+ cv2.imencode(Path(path).suffix, im)[1].tofile(path)
+ return True
+ except Exception:
+ return False
+
+
+def imshow(path, im):
+ imshow_(path.encode('unicode_escape').decode(), im)
+
+
+cv2.imread, cv2.imwrite, cv2.imshow = imread, imwrite, imshow # redefine
+
+# Variables ------------------------------------------------------------------------------------------------------------
+NCOLS = 0 if is_docker() else shutil.get_terminal_size().columns # terminal window size for tqdm
diff --git a/yolov7_seg/seg/utils/google_app_engine/Dockerfile b/yolov7_seg/seg/utils/google_app_engine/Dockerfile
new file mode 100644
index 000000000..d889610b1
--- /dev/null
+++ b/yolov7_seg/seg/utils/google_app_engine/Dockerfile
@@ -0,0 +1,25 @@
+FROM gcr.io/google-appengine/python
+
+# Create a virtualenv for dependencies. This isolates these packages from
+# system-level packages.
+# Use -p python3 or -p python3.7 to select python version. Default is version 2.
+RUN virtualenv /env -p python3
+
+# Setting these environment variables are the same as running
+# source /env/bin/activate.
+ENV VIRTUAL_ENV /env
+ENV PATH /env/bin:$PATH
+
+RUN apt-get update && apt-get install -y python-opencv
+
+# Copy the application's requirements.txt and run pip to install all
+# dependencies into the virtualenv.
+ADD requirements.txt /app/requirements.txt
+RUN pip install -r /app/requirements.txt
+
+# Add the application source code.
+ADD . /app
+
+# Run a WSGI server to serve the application. gunicorn must be declared as
+# a dependency in requirements.txt.
+CMD gunicorn -b :$PORT main:app
diff --git a/yolov7_seg/seg/utils/google_app_engine/additional_requirements.txt b/yolov7_seg/seg/utils/google_app_engine/additional_requirements.txt
new file mode 100644
index 000000000..ed71f8407
--- /dev/null
+++ b/yolov7_seg/seg/utils/google_app_engine/additional_requirements.txt
@@ -0,0 +1,4 @@
+# add these requirements in your app on top of the existing ones
+pip==21.1
+Flask==1.0.2
+gunicorn==19.9.0
diff --git a/yolov7_seg/seg/utils/google_app_engine/app.yaml b/yolov7_seg/seg/utils/google_app_engine/app.yaml
new file mode 100644
index 000000000..1cad968c6
--- /dev/null
+++ b/yolov7_seg/seg/utils/google_app_engine/app.yaml
@@ -0,0 +1,14 @@
+runtime: custom
+env: flex
+
+service: yolov5app
+
+liveness_check:
+ initial_delay_sec: 600
+
+manual_scaling:
+ instances: 1
+resources:
+ cpu: 1
+ memory_gb: 4
+ disk_size_gb: 20
diff --git a/yolov7_seg/seg/utils/loggers/__init__.py b/yolov7_seg/seg/utils/loggers/__init__.py
new file mode 100644
index 000000000..12a73bdac
--- /dev/null
+++ b/yolov7_seg/seg/utils/loggers/__init__.py
@@ -0,0 +1,326 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Logging utils
+"""
+
+import os
+import warnings
+from pathlib import Path
+
+import pkg_resources as pkg
+import torch
+from torch.utils.tensorboard import SummaryWriter
+
+from utils.general import colorstr, cv2
+from utils.loggers.clearml.clearml_utils import ClearmlLogger
+from utils.loggers.wandb.wandb_utils import WandbLogger
+from utils.plots import plot_images, plot_labels, plot_results
+from utils.torch_utils import de_parallel
+
+LOGGERS = ('csv', 'tb', 'wandb', 'clearml') # *.csv, TensorBoard, Weights & Biases, ClearML
+RANK = int(os.getenv('RANK', -1))
+
+try:
+ import wandb
+
+ assert hasattr(wandb, '__version__') # verify package import not local dir
+ if pkg.parse_version(wandb.__version__) >= pkg.parse_version('0.12.2') and RANK in {0, -1}:
+ try:
+ wandb_login_success = wandb.login(timeout=30)
+ except wandb.errors.UsageError: # known non-TTY terminal issue
+ wandb_login_success = False
+ if not wandb_login_success:
+ wandb = None
+except (ImportError, AssertionError):
+ wandb = None
+
+try:
+ import clearml
+
+ assert hasattr(clearml, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ clearml = None
+
+
+class Loggers():
+ # YOLOv5 Loggers class
+ def __init__(self, save_dir=None, weights=None, opt=None, hyp=None, logger=None, include=LOGGERS):
+ self.save_dir = save_dir
+ self.weights = weights
+ self.opt = opt
+ self.hyp = hyp
+ self.plots = not opt.noplots # plot results
+ self.logger = logger # for printing results to console
+ self.include = include
+ self.keys = [
+ 'train/box_loss',
+ 'train/obj_loss',
+ 'train/cls_loss', # train loss
+ 'metrics/precision',
+ 'metrics/recall',
+ 'metrics/mAP_0.5',
+ 'metrics/mAP_0.5:0.95', # metrics
+ 'val/box_loss',
+ 'val/obj_loss',
+ 'val/cls_loss', # val loss
+ 'x/lr0',
+ 'x/lr1',
+ 'x/lr2'] # params
+ self.best_keys = ['best/epoch', 'best/precision', 'best/recall', 'best/mAP_0.5', 'best/mAP_0.5:0.95']
+ for k in LOGGERS:
+ setattr(self, k, None) # init empty logger dictionary
+ self.csv = True # always log to csv
+
+ # Messages
+ if not wandb:
+ prefix = colorstr('Weights & Biases: ')
+ s = f"{prefix}run 'pip install wandb' to automatically track and visualize YOLOv5 🚀 runs in Weights & Biases"
+ self.logger.info(s)
+ if not clearml:
+ prefix = colorstr('ClearML: ')
+ s = f"{prefix}run 'pip install clearml' to automatically track, visualize and remotely train YOLOv5 🚀 in ClearML"
+ self.logger.info(s)
+
+ # TensorBoard
+ s = self.save_dir
+ if 'tb' in self.include and not self.opt.evolve:
+ prefix = colorstr('TensorBoard: ')
+ self.logger.info(f"{prefix}Start with 'tensorboard --logdir {s.parent}', view at http://localhost:6006/")
+ self.tb = SummaryWriter(str(s))
+
+ # W&B
+ if wandb and 'wandb' in self.include:
+ wandb_artifact_resume = isinstance(self.opt.resume, str) and self.opt.resume.startswith('wandb-artifact://')
+ run_id = torch.load(self.weights).get('wandb_id') if self.opt.resume and not wandb_artifact_resume else None
+ self.opt.hyp = self.hyp # add hyperparameters
+ self.wandb = WandbLogger(self.opt, run_id)
+ # temp warn. because nested artifacts not supported after 0.12.10
+ if pkg.parse_version(wandb.__version__) >= pkg.parse_version('0.12.11'):
+ s = "YOLOv5 temporarily requires wandb version 0.12.10 or below. Some features may not work as expected."
+ self.logger.warning(s)
+ else:
+ self.wandb = None
+
+ # ClearML
+ if clearml and 'clearml' in self.include:
+ self.clearml = ClearmlLogger(self.opt, self.hyp)
+ else:
+ self.clearml = None
+
+ def on_train_start(self):
+ # Callback runs on train start
+ pass
+
+ def on_pretrain_routine_end(self, labels, names):
+ # Callback runs on pre-train routine end
+ if self.plots:
+ plot_labels(labels, names, self.save_dir)
+ paths = self.save_dir.glob('*labels*.jpg') # training labels
+ if self.wandb:
+ self.wandb.log({"Labels": [wandb.Image(str(x), caption=x.name) for x in paths]})
+ # if self.clearml:
+ # pass # ClearML saves these images automatically using hooks
+
+ def on_train_batch_end(self, model, ni, imgs, targets, paths):
+ # Callback runs on train batch end
+ # ni: number integrated batches (since train start)
+ if self.plots:
+ if ni < 3:
+ f = self.save_dir / f'train_batch{ni}.jpg' # filename
+ plot_images(imgs, targets, paths, f)
+ if ni == 0 and self.tb and not self.opt.sync_bn:
+ log_tensorboard_graph(self.tb, model, imgsz=(self.opt.imgsz, self.opt.imgsz))
+ if ni == 10 and (self.wandb or self.clearml):
+ files = sorted(self.save_dir.glob('train*.jpg'))
+ if self.wandb:
+ self.wandb.log({'Mosaics': [wandb.Image(str(f), caption=f.name) for f in files if f.exists()]})
+ if self.clearml:
+ self.clearml.log_debug_samples(files, title='Mosaics')
+
+ def on_train_epoch_end(self, epoch):
+ # Callback runs on train epoch end
+ if self.wandb:
+ self.wandb.current_epoch = epoch + 1
+
+ def on_val_image_end(self, pred, predn, path, names, im):
+ # Callback runs on val image end
+ if self.wandb:
+ self.wandb.val_one_image(pred, predn, path, names, im)
+ if self.clearml:
+ self.clearml.log_image_with_boxes(path, pred, names, im)
+
+ def on_val_end(self):
+ # Callback runs on val end
+ if self.wandb or self.clearml:
+ files = sorted(self.save_dir.glob('val*.jpg'))
+ if self.wandb:
+ self.wandb.log({"Validation": [wandb.Image(str(f), caption=f.name) for f in files]})
+ if self.clearml:
+ self.clearml.log_debug_samples(files, title='Validation')
+
+ def on_fit_epoch_end(self, vals, epoch, best_fitness, fi):
+ # Callback runs at the end of each fit (train+val) epoch
+ x = dict(zip(self.keys, vals))
+ if self.csv:
+ file = self.save_dir / 'results.csv'
+ n = len(x) + 1 # number of cols
+ s = '' if file.exists() else (('%20s,' * n % tuple(['epoch'] + self.keys)).rstrip(',') + '\n') # add header
+ with open(file, 'a') as f:
+ f.write(s + ('%20.5g,' * n % tuple([epoch] + vals)).rstrip(',') + '\n')
+
+ if self.tb:
+ for k, v in x.items():
+ self.tb.add_scalar(k, v, epoch)
+ elif self.clearml: # log to ClearML if TensorBoard not used
+ for k, v in x.items():
+ title, series = k.split('/')
+ self.clearml.task.get_logger().report_scalar(title, series, v, epoch)
+
+ if self.wandb:
+ if best_fitness == fi:
+ best_results = [epoch] + vals[3:7]
+ for i, name in enumerate(self.best_keys):
+ self.wandb.wandb_run.summary[name] = best_results[i] # log best results in the summary
+ self.wandb.log(x)
+ self.wandb.end_epoch(best_result=best_fitness == fi)
+
+ if self.clearml:
+ self.clearml.current_epoch_logged_images = set() # reset epoch image limit
+ self.clearml.current_epoch += 1
+
+ def on_model_save(self, last, epoch, final_epoch, best_fitness, fi):
+ # Callback runs on model save event
+ if (epoch + 1) % self.opt.save_period == 0 and not final_epoch and self.opt.save_period != -1:
+ if self.wandb:
+ self.wandb.log_model(last.parent, self.opt, epoch, fi, best_model=best_fitness == fi)
+ if self.clearml:
+ self.clearml.task.update_output_model(model_path=str(last),
+ model_name='Latest Model',
+ auto_delete_file=False)
+
+ def on_train_end(self, last, best, epoch, results):
+ # Callback runs on training end, i.e. saving best model
+ if self.plots:
+ plot_results(file=self.save_dir / 'results.csv') # save results.png
+ files = ['results.png', 'confusion_matrix.png', *(f'{x}_curve.png' for x in ('F1', 'PR', 'P', 'R'))]
+ files = [(self.save_dir / f) for f in files if (self.save_dir / f).exists()] # filter
+ self.logger.info(f"Results saved to {colorstr('bold', self.save_dir)}")
+
+ if self.tb and not self.clearml: # These images are already captured by ClearML by now, we don't want doubles
+ for f in files:
+ self.tb.add_image(f.stem, cv2.imread(str(f))[..., ::-1], epoch, dataformats='HWC')
+
+ if self.wandb:
+ self.wandb.log(dict(zip(self.keys[3:10], results)))
+ self.wandb.log({"Results": [wandb.Image(str(f), caption=f.name) for f in files]})
+ # Calling wandb.log. TODO: Refactor this into WandbLogger.log_model
+ if not self.opt.evolve:
+ wandb.log_artifact(str(best if best.exists() else last),
+ type='model',
+ name=f'run_{self.wandb.wandb_run.id}_model',
+ aliases=['latest', 'best', 'stripped'])
+ self.wandb.finish_run()
+
+ if self.clearml and not self.opt.evolve:
+ self.clearml.task.update_output_model(model_path=str(best if best.exists() else last), name='Best Model')
+
+ def on_params_update(self, params: dict):
+ # Update hyperparams or configs of the experiment
+ if self.wandb:
+ self.wandb.wandb_run.config.update(params, allow_val_change=True)
+
+
+class GenericLogger:
+ """
+ YOLOv5 General purpose logger for non-task specific logging
+ Usage: from utils.loggers import GenericLogger; logger = GenericLogger(...)
+ Arguments
+ opt: Run arguments
+ console_logger: Console logger
+ include: loggers to include
+ """
+
+ def __init__(self, opt, console_logger, include=('tb', 'wandb')):
+ # init default loggers
+ self.save_dir = Path(opt.save_dir)
+ self.include = include
+ self.console_logger = console_logger
+ self.csv = self.save_dir / 'results.csv' # CSV logger
+ if 'tb' in self.include:
+ prefix = colorstr('TensorBoard: ')
+ self.console_logger.info(
+ f"{prefix}Start with 'tensorboard --logdir {self.save_dir.parent}', view at http://localhost:6006/")
+ self.tb = SummaryWriter(str(self.save_dir))
+
+ if wandb and 'wandb' in self.include:
+ self.wandb = wandb.init(project=web_project_name(str(opt.project)),
+ name=None if opt.name == "exp" else opt.name,
+ config=opt)
+ else:
+ self.wandb = None
+
+ def log_metrics(self, metrics, epoch):
+ # Log metrics dictionary to all loggers
+ if self.csv:
+ keys, vals = list(metrics.keys()), list(metrics.values())
+ n = len(metrics) + 1 # number of cols
+ s = '' if self.csv.exists() else (('%23s,' * n % tuple(['epoch'] + keys)).rstrip(',') + '\n') # header
+ with open(self.csv, 'a') as f:
+ f.write(s + ('%23.5g,' * n % tuple([epoch] + vals)).rstrip(',') + '\n')
+
+ if self.tb:
+ for k, v in metrics.items():
+ self.tb.add_scalar(k, v, epoch)
+
+ if self.wandb:
+ self.wandb.log(metrics, step=epoch)
+
+ def log_images(self, files, name='Images', epoch=0):
+ # Log images to all loggers
+ files = [Path(f) for f in (files if isinstance(files, (tuple, list)) else [files])] # to Path
+ files = [f for f in files if f.exists()] # filter by exists
+
+ if self.tb:
+ for f in files:
+ self.tb.add_image(f.stem, cv2.imread(str(f))[..., ::-1], epoch, dataformats='HWC')
+
+ if self.wandb:
+ self.wandb.log({name: [wandb.Image(str(f), caption=f.name) for f in files]}, step=epoch)
+
+ def log_graph(self, model, imgsz=(640, 640)):
+ # Log model graph to all loggers
+ if self.tb:
+ log_tensorboard_graph(self.tb, model, imgsz)
+
+ def log_model(self, model_path, epoch=0, metadata={}):
+ # Log model to all loggers
+ if self.wandb:
+ art = wandb.Artifact(name=f"run_{wandb.run.id}_model", type="model", metadata=metadata)
+ art.add_file(str(model_path))
+ wandb.log_artifact(art)
+
+ def update_params(self, params):
+ # Update the paramters logged
+ if self.wandb:
+ wandb.run.config.update(params, allow_val_change=True)
+
+
+def log_tensorboard_graph(tb, model, imgsz=(640, 640)):
+ # Log model graph to TensorBoard
+ try:
+ p = next(model.parameters()) # for device, type
+ imgsz = (imgsz, imgsz) if isinstance(imgsz, int) else imgsz # expand
+ im = torch.zeros((1, 3, *imgsz)).to(p.device).type_as(p) # input image (WARNING: must be zeros, not empty)
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress jit trace warning
+ tb.add_graph(torch.jit.trace(de_parallel(model), im, strict=False), [])
+ except Exception as e:
+ print(f'WARNING: TensorBoard graph visualization failure {e}')
+
+
+def web_project_name(project):
+ # Convert local project name to web project name
+ if not project.startswith('runs/train'):
+ return project
+ suffix = '-Classify' if project.endswith('-cls') else '-Segment' if project.endswith('-seg') else ''
+ return f'YOLOv5{suffix}'
diff --git a/yolov7_seg/seg/utils/loggers/clearml/README.md b/yolov7_seg/seg/utils/loggers/clearml/README.md
new file mode 100644
index 000000000..7d9c51d14
--- /dev/null
+++ b/yolov7_seg/seg/utils/loggers/clearml/README.md
@@ -0,0 +1,222 @@
+# ClearML Integration
+
+
+
+## About ClearML
+
+[ClearML](https://cutt.ly/yolov5-tutorial-clearml) is an [open-source](https://github.com/allegroai/clearml) toolbox designed to save you time ⏱️.
+
+🔨 Track every YOLOv5 training run in the experiment manager
+
+🔧 Version and easily access your custom training data with the integrated ClearML Data Versioning Tool
+
+🔦 Remotely train and monitor your YOLOv5 training runs using ClearML Agent
+
+🔬 Get the very best mAP using ClearML Hyperparameter Optimization
+
+🔭 Turn your newly trained YOLOv5 model into an API with just a few commands using ClearML Serving
+
+
+And so much more. It's up to you how many of these tools you want to use, you can stick to the experiment manager, or chain them all together into an impressive pipeline!
+
+
+
+
+
+
+
+
+
+## 🦾 Setting Things Up
+
+To keep track of your experiments and/or data, ClearML needs to communicate to a server. You have 2 options to get one:
+
+Either sign up for free to the [ClearML Hosted Service](https://cutt.ly/yolov5-tutorial-clearml) or you can set up your own server, see [here](https://clear.ml/docs/latest/docs/deploying_clearml/clearml_server). Even the server is open-source, so even if you're dealing with sensitive data, you should be good to go!
+
+1. Install the `clearml` python package:
+
+ ```bash
+ pip install clearml
+ ```
+
+1. Connect the ClearML SDK to the server by [creating credentials](https://app.clear.ml/settings/workspace-configuration) (go right top to Settings -> Workspace -> Create new credentials), then execute the command below and follow the instructions:
+
+ ```bash
+ clearml-init
+ ```
+
+That's it! You're done 😎
+
+
+
+## 🚀 Training YOLOv5 With ClearML
+
+To enable ClearML experiment tracking, simply install the ClearML pip package.
+
+```bash
+pip install clearml
+```
+
+This will enable integration with the YOLOv5 training script. Every training run from now on, will be captured and stored by the ClearML experiment manager. If you want to change the `project_name` or `task_name`, head over to our custom logger, where you can change it: `utils/loggers/clearml/clearml_utils.py`
+
+```bash
+python train.py --img 640 --batch 16 --epochs 3 --data coco128.yaml --weights yolov5s.pt --cache
+```
+
+This will capture:
+- Source code + uncommitted changes
+- Installed packages
+- (Hyper)parameters
+- Model files (use `--save-period n` to save a checkpoint every n epochs)
+- Console output
+- Scalars (mAP_0.5, mAP_0.5:0.95, precision, recall, losses, learning rates, ...)
+- General info such as machine details, runtime, creation date etc.
+- All produced plots such as label correlogram and confusion matrix
+- Images with bounding boxes per epoch
+- Mosaic per epoch
+- Validation images per epoch
+- ...
+
+That's a lot right? 🤯
+Now, we can visualize all of this information in the ClearML UI to get an overview of our training progress. Add custom columns to the table view (such as e.g. mAP_0.5) so you can easily sort on the best performing model. Or select multiple experiments and directly compare them!
+
+There even more we can do with all of this information, like hyperparameter optimization and remote execution, so keep reading if you want to see how that works!
+
+
+
+## 🔗 Dataset Version Management
+
+Versioning your data separately from your code is generally a good idea and makes it easy to aqcuire the latest version too. This repository supports supplying a dataset version ID and it will make sure to get the data if it's not there yet. Next to that, this workflow also saves the used dataset ID as part of the task parameters, so you will always know for sure which data was used in which experiment!
+
+
+
+### Prepare Your Dataset
+
+The YOLOv5 repository supports a number of different datasets by using yaml files containing their information. By default datasets are downloaded to the `../datasets` folder in relation to the repository root folder. So if you downloaded the `coco128` dataset using the link in the yaml or with the scripts provided by yolov5, you get this folder structure:
+
+```
+..
+|_ yolov5
+|_ datasets
+ |_ coco128
+ |_ images
+ |_ labels
+ |_ LICENSE
+ |_ README.txt
+```
+But this can be any dataset you wish. Feel free to use your own, as long as you keep to this folder structure.
+
+Next, ⚠️**copy the corresponding yaml file to the root of the dataset folder**⚠️. This yaml files contains the information ClearML will need to properly use the dataset. You can make this yourself too, of course, just follow the structure of the example yamls.
+
+Basically we need the following keys: `path`, `train`, `test`, `val`, `nc`, `names`.
+
+```
+..
+|_ yolov5
+|_ datasets
+ |_ coco128
+ |_ images
+ |_ labels
+ |_ coco128.yaml # <---- HERE!
+ |_ LICENSE
+ |_ README.txt
+```
+
+### Upload Your Dataset
+
+To get this dataset into ClearML as a versionned dataset, go to the dataset root folder and run the following command:
+```bash
+cd coco128
+clearml-data sync --project YOLOv5 --name coco128 --folder .
+```
+
+The command `clearml-data sync` is actually a shorthand command. You could also run these commands one after the other:
+```bash
+# Optionally add --parent if you want to base
+# this version on another dataset version, so no duplicate files are uploaded!
+clearml-data create --name coco128 --project YOLOv5
+clearml-data add --files .
+clearml-data close
+```
+
+### Run Training Using A ClearML Dataset
+
+Now that you have a ClearML dataset, you can very simply use it to train custom YOLOv5 🚀 models!
+
+```bash
+python train.py --img 640 --batch 16 --epochs 3 --data clearml:// --weights yolov5s.pt --cache
+```
+
+
+
+## 👀 Hyperparameter Optimization
+
+Now that we have our experiments and data versioned, it's time to take a look at what we can build on top!
+
+Using the code information, installed packages and environment details, the experiment itself is now **completely reproducible**. In fact, ClearML allows you to clone an experiment and even change its parameters. We can then just rerun it with these new parameters automatically, this is basically what HPO does!
+
+To **run hyperparameter optimization locally**, we've included a pre-made script for you. Just make sure a training task has been run at least once, so it is in the ClearML experiment manager, we will essentially clone it and change its hyperparameters.
+
+You'll need to fill in the ID of this `template task` in the script found at `utils/loggers/clearml/hpo.py` and then just run it :) You can change `task.execute_locally()` to `task.execute()` to put it in a ClearML queue and have a remote agent work on it instead.
+
+```bash
+# To use optuna, install it first, otherwise you can change the optimizer to just be RandomSearch
+pip install optuna
+python utils/loggers/clearml/hpo.py
+```
+
+
+
+## 🤯 Remote Execution (advanced)
+
+Running HPO locally is really handy, but what if we want to run our experiments on a remote machine instead? Maybe you have access to a very powerful GPU machine on-site or you have some budget to use cloud GPUs.
+This is where the ClearML Agent comes into play. Check out what the agent can do here:
+
+- [YouTube video](https://youtu.be/MX3BrXnaULs)
+- [Documentation](https://clear.ml/docs/latest/docs/clearml_agent)
+
+In short: every experiment tracked by the experiment manager contains enough information to reproduce it on a different machine (installed packages, uncommitted changes etc.). So a ClearML agent does just that: it listens to a queue for incoming tasks and when it finds one, it recreates the environment and runs it while still reporting scalars, plots etc. to the experiment manager.
+
+You can turn any machine (a cloud VM, a local GPU machine, your own laptop ... ) into a ClearML agent by simply running:
+```bash
+clearml-agent daemon --queue [--docker]
+```
+
+### Cloning, Editing And Enqueuing
+
+With our agent running, we can give it some work. Remember from the HPO section that we can clone a task and edit the hyperparameters? We can do that from the interface too!
+
+🪄 Clone the experiment by right clicking it
+
+🎯 Edit the hyperparameters to what you wish them to be
+
+⏳ Enqueue the task to any of the queues by right clicking it
+
+
+
+### Executing A Task Remotely
+
+Now you can clone a task like we explained above, or simply mark your current script by adding `task.execute_remotely()` and on execution it will be put into a queue, for the agent to start working on!
+
+To run the YOLOv5 training script remotely, all you have to do is add this line to the training.py script after the clearml logger has been instatiated:
+```python
+# ...
+# Loggers
+data_dict = None
+if RANK in {-1, 0}:
+ loggers = Loggers(save_dir, weights, opt, hyp, LOGGER) # loggers instance
+ if loggers.clearml:
+ loggers.clearml.task.execute_remotely(queue='my_queue') # <------ ADD THIS LINE
+ # Data_dict is either None is user did not choose for ClearML dataset or is filled in by ClearML
+ data_dict = loggers.clearml.data_dict
+# ...
+```
+When running the training script after this change, python will run the script up until that line, after which it will package the code and send it to the queue instead!
+
+### Autoscaling workers
+
+ClearML comes with autoscalers too! This tool will automatically spin up new remote machines in the cloud of your choice (AWS, GCP, Azure) and turn them into ClearML agents for you whenever there are experiments detected in the queue. Once the tasks are processed, the autoscaler will automatically shut down the remote machines and you stop paying!
+
+Check out the autoscalers getting started video below.
+
+[](https://youtu.be/j4XVMAaUt3E)
diff --git a/yolov7_seg/seg/utils/loggers/clearml/__init__.py b/yolov7_seg/seg/utils/loggers/clearml/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/yolov7_seg/seg/utils/loggers/clearml/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/yolov7_seg/seg/utils/loggers/clearml/clearml_utils.py b/yolov7_seg/seg/utils/loggers/clearml/clearml_utils.py
new file mode 100644
index 000000000..174cce682
--- /dev/null
+++ b/yolov7_seg/seg/utils/loggers/clearml/clearml_utils.py
@@ -0,0 +1,156 @@
+"""Main Logger class for ClearML experiment tracking."""
+import glob
+import re
+from pathlib import Path
+
+import numpy as np
+import yaml
+
+from utils.plots import Annotator, colors
+
+try:
+ import clearml
+ from clearml import Dataset, Task
+ assert hasattr(clearml, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ clearml = None
+
+
+def construct_dataset(clearml_info_string):
+ """Load in a clearml dataset and fill the internal data_dict with its contents.
+ """
+ dataset_id = clearml_info_string.replace('clearml://', '')
+ dataset = Dataset.get(dataset_id=dataset_id)
+ dataset_root_path = Path(dataset.get_local_copy())
+
+ # We'll search for the yaml file definition in the dataset
+ yaml_filenames = list(glob.glob(str(dataset_root_path / "*.yaml")) + glob.glob(str(dataset_root_path / "*.yml")))
+ if len(yaml_filenames) > 1:
+ raise ValueError('More than one yaml file was found in the dataset root, cannot determine which one contains '
+ 'the dataset definition this way.')
+ elif len(yaml_filenames) == 0:
+ raise ValueError('No yaml definition found in dataset root path, check that there is a correct yaml file '
+ 'inside the dataset root path.')
+ with open(yaml_filenames[0]) as f:
+ dataset_definition = yaml.safe_load(f)
+
+ assert set(dataset_definition.keys()).issuperset(
+ {'train', 'test', 'val', 'nc', 'names'}
+ ), "The right keys were not found in the yaml file, make sure it at least has the following keys: ('train', 'test', 'val', 'nc', 'names')"
+
+ data_dict = dict()
+ data_dict['train'] = str(
+ (dataset_root_path / dataset_definition['train']).resolve()) if dataset_definition['train'] else None
+ data_dict['test'] = str(
+ (dataset_root_path / dataset_definition['test']).resolve()) if dataset_definition['test'] else None
+ data_dict['val'] = str(
+ (dataset_root_path / dataset_definition['val']).resolve()) if dataset_definition['val'] else None
+ data_dict['nc'] = dataset_definition['nc']
+ data_dict['names'] = dataset_definition['names']
+
+ return data_dict
+
+
+class ClearmlLogger:
+ """Log training runs, datasets, models, and predictions to ClearML.
+
+ This logger sends information to ClearML at app.clear.ml or to your own hosted server. By default,
+ this information includes hyperparameters, system configuration and metrics, model metrics, code information and
+ basic data metrics and analyses.
+
+ By providing additional command line arguments to train.py, datasets,
+ models and predictions can also be logged.
+ """
+
+ def __init__(self, opt, hyp):
+ """
+ - Initialize ClearML Task, this object will capture the experiment
+ - Upload dataset version to ClearML Data if opt.upload_dataset is True
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ hyp (dict) -- Hyperparameters for this run
+
+ """
+ self.current_epoch = 0
+ # Keep tracked of amount of logged images to enforce a limit
+ self.current_epoch_logged_images = set()
+ # Maximum number of images to log to clearML per epoch
+ self.max_imgs_to_log_per_epoch = 16
+ # Get the interval of epochs when bounding box images should be logged
+ self.bbox_interval = opt.bbox_interval
+ self.clearml = clearml
+ self.task = None
+ self.data_dict = None
+ if self.clearml:
+ self.task = Task.init(
+ project_name='YOLOv5',
+ task_name='training',
+ tags=['YOLOv5'],
+ output_uri=True,
+ auto_connect_frameworks={'pytorch': False}
+ # We disconnect pytorch auto-detection, because we added manual model save points in the code
+ )
+ # ClearML's hooks will already grab all general parameters
+ # Only the hyperparameters coming from the yaml config file
+ # will have to be added manually!
+ self.task.connect(hyp, name='Hyperparameters')
+
+ # Get ClearML Dataset Version if requested
+ if opt.data.startswith('clearml://'):
+ # data_dict should have the following keys:
+ # names, nc (number of classes), test, train, val (all three relative paths to ../datasets)
+ self.data_dict = construct_dataset(opt.data)
+ # Set data to data_dict because wandb will crash without this information and opt is the best way
+ # to give it to them
+ opt.data = self.data_dict
+
+ def log_debug_samples(self, files, title='Debug Samples'):
+ """
+ Log files (images) as debug samples in the ClearML task.
+
+ arguments:
+ files (List(PosixPath)) a list of file paths in PosixPath format
+ title (str) A title that groups together images with the same values
+ """
+ for f in files:
+ if f.exists():
+ it = re.search(r'_batch(\d+)', f.name)
+ iteration = int(it.groups()[0]) if it else 0
+ self.task.get_logger().report_image(title=title,
+ series=f.name.replace(it.group(), ''),
+ local_path=str(f),
+ iteration=iteration)
+
+ def log_image_with_boxes(self, image_path, boxes, class_names, image, conf_threshold=0.25):
+ """
+ Draw the bounding boxes on a single image and report the result as a ClearML debug sample.
+
+ arguments:
+ image_path (PosixPath) the path the original image file
+ boxes (list): list of scaled predictions in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ class_names (dict): dict containing mapping of class int to class name
+ image (Tensor): A torch tensor containing the actual image data
+ """
+ if len(self.current_epoch_logged_images) < self.max_imgs_to_log_per_epoch and self.current_epoch >= 0:
+ # Log every bbox_interval times and deduplicate for any intermittend extra eval runs
+ if self.current_epoch % self.bbox_interval == 0 and image_path not in self.current_epoch_logged_images:
+ im = np.ascontiguousarray(np.moveaxis(image.mul(255).clamp(0, 255).byte().cpu().numpy(), 0, 2))
+ annotator = Annotator(im=im, pil=True)
+ for i, (conf, class_nr, box) in enumerate(zip(boxes[:, 4], boxes[:, 5], boxes[:, :4])):
+ color = colors(i)
+
+ class_name = class_names[int(class_nr)]
+ confidence_percentage = round(float(conf) * 100, 2)
+ label = f"{class_name}: {confidence_percentage}%"
+
+ if conf > conf_threshold:
+ annotator.rectangle(box.cpu().numpy(), outline=color)
+ annotator.box_label(box.cpu().numpy(), label=label, color=color)
+
+ annotated_image = annotator.result()
+ self.task.get_logger().report_image(title='Bounding Boxes',
+ series=image_path.name,
+ iteration=self.current_epoch,
+ image=annotated_image)
+ self.current_epoch_logged_images.add(image_path)
diff --git a/yolov7_seg/seg/utils/loggers/clearml/hpo.py b/yolov7_seg/seg/utils/loggers/clearml/hpo.py
new file mode 100644
index 000000000..bb3b36385
--- /dev/null
+++ b/yolov7_seg/seg/utils/loggers/clearml/hpo.py
@@ -0,0 +1,84 @@
+from clearml import Task
+# Connecting ClearML with the current process,
+# from here on everything is logged automatically
+from clearml.automation import HyperParameterOptimizer, UniformParameterRange
+from clearml.automation.optuna import OptimizerOptuna
+
+task = Task.init(project_name='Hyper-Parameter Optimization',
+ task_name='YOLOv5',
+ task_type=Task.TaskTypes.optimizer,
+ reuse_last_task_id=False)
+
+# Example use case:
+optimizer = HyperParameterOptimizer(
+ # This is the experiment we want to optimize
+ base_task_id='',
+ # here we define the hyper-parameters to optimize
+ # Notice: The parameter name should exactly match what you see in the UI: /
+ # For Example, here we see in the base experiment a section Named: "General"
+ # under it a parameter named "batch_size", this becomes "General/batch_size"
+ # If you have `argparse` for example, then arguments will appear under the "Args" section,
+ # and you should instead pass "Args/batch_size"
+ hyper_parameters=[
+ UniformParameterRange('Hyperparameters/lr0', min_value=1e-5, max_value=1e-1),
+ UniformParameterRange('Hyperparameters/lrf', min_value=0.01, max_value=1.0),
+ UniformParameterRange('Hyperparameters/momentum', min_value=0.6, max_value=0.98),
+ UniformParameterRange('Hyperparameters/weight_decay', min_value=0.0, max_value=0.001),
+ UniformParameterRange('Hyperparameters/warmup_epochs', min_value=0.0, max_value=5.0),
+ UniformParameterRange('Hyperparameters/warmup_momentum', min_value=0.0, max_value=0.95),
+ UniformParameterRange('Hyperparameters/warmup_bias_lr', min_value=0.0, max_value=0.2),
+ UniformParameterRange('Hyperparameters/box', min_value=0.02, max_value=0.2),
+ UniformParameterRange('Hyperparameters/cls', min_value=0.2, max_value=4.0),
+ UniformParameterRange('Hyperparameters/cls_pw', min_value=0.5, max_value=2.0),
+ UniformParameterRange('Hyperparameters/obj', min_value=0.2, max_value=4.0),
+ UniformParameterRange('Hyperparameters/obj_pw', min_value=0.5, max_value=2.0),
+ UniformParameterRange('Hyperparameters/iou_t', min_value=0.1, max_value=0.7),
+ UniformParameterRange('Hyperparameters/anchor_t', min_value=2.0, max_value=8.0),
+ UniformParameterRange('Hyperparameters/fl_gamma', min_value=0.0, max_value=4.0),
+ UniformParameterRange('Hyperparameters/hsv_h', min_value=0.0, max_value=0.1),
+ UniformParameterRange('Hyperparameters/hsv_s', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/hsv_v', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/degrees', min_value=0.0, max_value=45.0),
+ UniformParameterRange('Hyperparameters/translate', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/scale', min_value=0.0, max_value=0.9),
+ UniformParameterRange('Hyperparameters/shear', min_value=0.0, max_value=10.0),
+ UniformParameterRange('Hyperparameters/perspective', min_value=0.0, max_value=0.001),
+ UniformParameterRange('Hyperparameters/flipud', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/fliplr', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/mosaic', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/mixup', min_value=0.0, max_value=1.0),
+ UniformParameterRange('Hyperparameters/copy_paste', min_value=0.0, max_value=1.0)],
+ # this is the objective metric we want to maximize/minimize
+ objective_metric_title='metrics',
+ objective_metric_series='mAP_0.5',
+ # now we decide if we want to maximize it or minimize it (accuracy we maximize)
+ objective_metric_sign='max',
+ # let us limit the number of concurrent experiments,
+ # this in turn will make sure we do dont bombard the scheduler with experiments.
+ # if we have an auto-scaler connected, this, by proxy, will limit the number of machine
+ max_number_of_concurrent_tasks=1,
+ # this is the optimizer class (actually doing the optimization)
+ # Currently, we can choose from GridSearch, RandomSearch or OptimizerBOHB (Bayesian optimization Hyper-Band)
+ optimizer_class=OptimizerOptuna,
+ # If specified only the top K performing Tasks will be kept, the others will be automatically archived
+ save_top_k_tasks_only=5, # 5,
+ compute_time_limit=None,
+ total_max_jobs=20,
+ min_iteration_per_job=None,
+ max_iteration_per_job=None,
+)
+
+# report every 10 seconds, this is way too often, but we are testing here
+optimizer.set_report_period(10)
+# You can also use the line below instead to run all the optimizer tasks locally, without using queues or agent
+# an_optimizer.start_locally(job_complete_callback=job_complete_callback)
+# set the time limit for the optimization process (2 hours)
+optimizer.set_time_limit(in_minutes=120.0)
+# Start the optimization process in the local environment
+optimizer.start_locally()
+# wait until process is done (notice we are controlling the optimization process in the background)
+optimizer.wait()
+# make sure background optimization stopped
+optimizer.stop()
+
+print('We are done, good bye')
diff --git a/yolov7_seg/seg/utils/loggers/wandb/README.md b/yolov7_seg/seg/utils/loggers/wandb/README.md
new file mode 100644
index 000000000..d37b7226b
--- /dev/null
+++ b/yolov7_seg/seg/utils/loggers/wandb/README.md
@@ -0,0 +1,162 @@
+📚 This guide explains how to use **Weights & Biases** (W&B) with YOLOv5 🚀. UPDATED 29 September 2021.
+
+- [About Weights & Biases](#about-weights-&-biases)
+- [First-Time Setup](#first-time-setup)
+- [Viewing runs](#viewing-runs)
+- [Disabling wandb](#disabling-wandb)
+- [Advanced Usage: Dataset Versioning and Evaluation](#advanced-usage)
+- [Reports: Share your work with the world!](#reports)
+
+## About Weights & Biases
+
+Think of [W&B](https://wandb.ai/site?utm_campaign=repo_yolo_wandbtutorial) like GitHub for machine learning models. With a few lines of code, save everything you need to debug, compare and reproduce your models — architecture, hyperparameters, git commits, model weights, GPU usage, and even datasets and predictions.
+
+Used by top researchers including teams at OpenAI, Lyft, Github, and MILA, W&B is part of the new standard of best practices for machine learning. How W&B can help you optimize your machine learning workflows:
+
+- [Debug](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Free-2) model performance in real time
+- [GPU usage](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#System-4) visualized automatically
+- [Custom charts](https://wandb.ai/wandb/customizable-charts/reports/Powerful-Custom-Charts-To-Debug-Model-Peformance--VmlldzoyNzY4ODI) for powerful, extensible visualization
+- [Share insights](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Share-8) interactively with collaborators
+- [Optimize hyperparameters](https://docs.wandb.com/sweeps) efficiently
+- [Track](https://docs.wandb.com/artifacts) datasets, pipelines, and production models
+
+## First-Time Setup
+
+
+ Toggle Details
+When you first train, W&B will prompt you to create a new account and will generate an **API key** for you. If you are an existing user you can retrieve your key from https://wandb.ai/authorize. This key is used to tell W&B where to log your data. You only need to supply your key once, and then it is remembered on the same device.
+
+W&B will create a cloud **project** (default is 'YOLOv5') for your training runs, and each new training run will be provided a unique run **name** within that project as project/name. You can also manually set your project and run name as:
+
+```shell
+$ python train.py --project ... --name ...
+```
+
+YOLOv5 notebook example:
+
+
+
+
+## Viewing Runs
+
+
+ Toggle Details
+Run information streams from your environment to the W&B cloud console as you train. This allows you to monitor and even cancel runs in realtime . All important information is logged:
+
+- Training & Validation losses
+- Metrics: Precision, Recall, mAP@0.5, mAP@0.5:0.95
+- Learning Rate over time
+- A bounding box debugging panel, showing the training progress over time
+- GPU: Type, **GPU Utilization**, power, temperature, **CUDA memory usage**
+- System: Disk I/0, CPU utilization, RAM memory usage
+- Your trained model as W&B Artifact
+- Environment: OS and Python types, Git repository and state, **training command**
+
+
+
+
+## Disabling wandb
+
+- training after running `wandb disabled` inside that directory creates no wandb run
+ 
+
+- To enable wandb again, run `wandb online`
+ 
+
+## Advanced Usage
+
+You can leverage W&B artifacts and Tables integration to easily visualize and manage your datasets, models and training evaluations. Here are some quick examples to get you started.
+
+
+ 1: Train and Log Evaluation simultaneousy
+ This is an extension of the previous section, but it'll also training after uploading the dataset. This also evaluation Table
+ Evaluation table compares your predictions and ground truths across the validation set for each epoch. It uses the references to the already uploaded datasets,
+ so no images will be uploaded from your system more than once.
+
+ Usage
+ Code $ python train.py --upload_data val
+
+
+
+
+
+2. Visualize and Version Datasets
+ Log, visualize, dynamically query, and understand your data with W&B Tables. You can use the following command to log your dataset as a W&B Table. This will generate a {dataset}_wandb.yaml file which can be used to train from dataset artifact.
+
+ Usage
+ Code $ python utils/logger/wandb/log_dataset.py --project ... --name ... --data ..
+
+
+
+
+
+ 3: Train using dataset artifact
+ When you upload a dataset as described in the first section, you get a new config file with an added `_wandb` to its name. This file contains the information that
+ can be used to train a model directly from the dataset artifact. This also logs evaluation
+
+ Usage
+ Code $ python train.py --data {data}_wandb.yaml
+
+
+
+
+
+ 4: Save model checkpoints as artifacts
+ To enable saving and versioning checkpoints of your experiment, pass `--save_period n` with the base cammand, where `n` represents checkpoint interval.
+ You can also log both the dataset and model checkpoints simultaneously. If not passed, only the final model will be logged
+
+
+ Usage
+ Code $ python train.py --save_period 1
+
+
+
+
+
+
+
+ 5: Resume runs from checkpoint artifacts.
+Any run can be resumed using artifacts if the --resume argument starts with wandb-artifact:// prefix followed by the run path, i.e, wandb-artifact://username/project/runid . This doesn't require the model checkpoint to be present on the local system.
+
+
+ Usage
+ Code $ python train.py --resume wandb-artifact://{run_path}
+
+
+
+
+
+ 6: Resume runs from dataset artifact & checkpoint artifacts.
+ Local dataset or model checkpoints are not required. This can be used to resume runs directly on a different device
+ The syntax is same as the previous section, but you'll need to lof both the dataset and model checkpoints as artifacts, i.e, set bot --upload_dataset or
+ train from _wandb.yaml file and set --save_period
+
+
+ Usage
+ Code $ python train.py --resume wandb-artifact://{run_path}
+
+
+
+
+
+
+
+ Reports
+W&B Reports can be created from your saved runs for sharing online. Once a report is created you will receive a link you can use to publically share your results. Here is an example report created from the COCO128 tutorial trainings of all four YOLOv5 models ([link](https://wandb.ai/glenn-jocher/yolov5_tutorial/reports/YOLOv5-COCO128-Tutorial-Results--VmlldzozMDI5OTY)).
+
+
+
+## Environments
+
+YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):
+
+- **Google Colab and Kaggle** notebooks with free GPU:
+- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)
+- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)
+- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
+
+## Status
+
+
+
+If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.
diff --git a/yolov7_seg/seg/utils/loggers/wandb/__init__.py b/yolov7_seg/seg/utils/loggers/wandb/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/yolov7_seg/seg/utils/loggers/wandb/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/yolov7_seg/seg/utils/loggers/wandb/log_dataset.py b/yolov7_seg/seg/utils/loggers/wandb/log_dataset.py
new file mode 100644
index 000000000..072969c75
--- /dev/null
+++ b/yolov7_seg/seg/utils/loggers/wandb/log_dataset.py
@@ -0,0 +1,27 @@
+import argparse
+
+from wandb_utils import WandbLogger
+
+from utils.general import LOGGER
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ logger = WandbLogger(opt, None, job_type='Dataset Creation') # TODO: return value unused
+ if not logger.wandb:
+ LOGGER.info("install wandb using `pip install wandb` to log the dataset")
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOv5', help='name of W&B Project')
+ parser.add_argument('--entity', default=None, help='W&B entity')
+ parser.add_argument('--name', type=str, default='log dataset', help='name of W&B run')
+
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/yolov7_seg/seg/utils/loggers/wandb/sweep.py b/yolov7_seg/seg/utils/loggers/wandb/sweep.py
new file mode 100644
index 000000000..735c96886
--- /dev/null
+++ b/yolov7_seg/seg/utils/loggers/wandb/sweep.py
@@ -0,0 +1,41 @@
+import sys
+from pathlib import Path
+
+import wandb
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from train import parse_opt, train
+from utils.callbacks import Callbacks
+from utils.general import increment_path
+from utils.torch_utils import select_device
+
+
+def sweep():
+ wandb.init()
+ # Get hyp dict from sweep agent. Copy because train() modifies parameters which confused wandb.
+ hyp_dict = vars(wandb.config).get("_items").copy()
+
+ # Workaround: get necessary opt args
+ opt = parse_opt(known=True)
+ opt.batch_size = hyp_dict.get("batch_size")
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
+ opt.epochs = hyp_dict.get("epochs")
+ opt.nosave = True
+ opt.data = hyp_dict.get("data")
+ opt.weights = str(opt.weights)
+ opt.cfg = str(opt.cfg)
+ opt.data = str(opt.data)
+ opt.hyp = str(opt.hyp)
+ opt.project = str(opt.project)
+ device = select_device(opt.device, batch_size=opt.batch_size)
+
+ # train
+ train(hyp_dict, opt, device, callbacks=Callbacks())
+
+
+if __name__ == "__main__":
+ sweep()
diff --git a/yolov7_seg/seg/utils/loggers/wandb/sweep.yaml b/yolov7_seg/seg/utils/loggers/wandb/sweep.yaml
new file mode 100644
index 000000000..044fca319
--- /dev/null
+++ b/yolov7_seg/seg/utils/loggers/wandb/sweep.yaml
@@ -0,0 +1,143 @@
+# Hyperparameters for training
+# To set range-
+# Provide min and max values as:
+# parameter:
+#
+# min: scalar
+# max: scalar
+# OR
+#
+# Set a specific list of search space-
+# parameter:
+# values: [scalar1, scalar2, scalar3...]
+#
+# You can use grid, bayesian and hyperopt search strategy
+# For more info on configuring sweeps visit - https://docs.wandb.ai/guides/sweeps/configuration
+
+program: utils/loggers/wandb/sweep.py
+method: random
+metric:
+ name: metrics/mAP_0.5
+ goal: maximize
+
+parameters:
+ # hyperparameters: set either min, max range or values list
+ data:
+ value: "data/coco128.yaml"
+ batch_size:
+ values: [64]
+ epochs:
+ values: [10]
+
+ lr0:
+ distribution: uniform
+ min: 1e-5
+ max: 1e-1
+ lrf:
+ distribution: uniform
+ min: 0.01
+ max: 1.0
+ momentum:
+ distribution: uniform
+ min: 0.6
+ max: 0.98
+ weight_decay:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ warmup_epochs:
+ distribution: uniform
+ min: 0.0
+ max: 5.0
+ warmup_momentum:
+ distribution: uniform
+ min: 0.0
+ max: 0.95
+ warmup_bias_lr:
+ distribution: uniform
+ min: 0.0
+ max: 0.2
+ box:
+ distribution: uniform
+ min: 0.02
+ max: 0.2
+ cls:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ cls_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ obj:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ obj_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ iou_t:
+ distribution: uniform
+ min: 0.1
+ max: 0.7
+ anchor_t:
+ distribution: uniform
+ min: 2.0
+ max: 8.0
+ fl_gamma:
+ distribution: uniform
+ min: 0.0
+ max: 4.0
+ hsv_h:
+ distribution: uniform
+ min: 0.0
+ max: 0.1
+ hsv_s:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ hsv_v:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ degrees:
+ distribution: uniform
+ min: 0.0
+ max: 45.0
+ translate:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ scale:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ shear:
+ distribution: uniform
+ min: 0.0
+ max: 10.0
+ perspective:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ flipud:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ fliplr:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mosaic:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mixup:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ copy_paste:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
diff --git a/yolov7_seg/seg/utils/loggers/wandb/wandb_utils.py b/yolov7_seg/seg/utils/loggers/wandb/wandb_utils.py
new file mode 100644
index 000000000..62dd457a6
--- /dev/null
+++ b/yolov7_seg/seg/utils/loggers/wandb/wandb_utils.py
@@ -0,0 +1,584 @@
+"""Utilities and tools for tracking runs with Weights & Biases."""
+
+import logging
+import os
+import sys
+from contextlib import contextmanager
+from pathlib import Path
+from typing import Dict
+
+import yaml
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from utils.dataloaders import LoadImagesAndLabels, img2label_paths
+from utils.general import LOGGER, check_dataset, check_file
+
+try:
+ import wandb
+
+ assert hasattr(wandb, '__version__') # verify package import not local dir
+except (ImportError, AssertionError):
+ wandb = None
+
+RANK = int(os.getenv('RANK', -1))
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):
+ return from_string[len(prefix):]
+
+
+def check_wandb_config_file(data_config_file):
+ wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path
+ if Path(wandb_config).is_file():
+ return wandb_config
+ return data_config_file
+
+
+def check_wandb_dataset(data_file):
+ is_trainset_wandb_artifact = False
+ is_valset_wandb_artifact = False
+ if isinstance(data_file, dict):
+ # In that case another dataset manager has already processed it and we don't have to
+ return data_file
+ if check_file(data_file) and data_file.endswith('.yaml'):
+ with open(data_file, errors='ignore') as f:
+ data_dict = yaml.safe_load(f)
+ is_trainset_wandb_artifact = isinstance(data_dict['train'],
+ str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX)
+ is_valset_wandb_artifact = isinstance(data_dict['val'],
+ str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX)
+ if is_trainset_wandb_artifact or is_valset_wandb_artifact:
+ return data_dict
+ else:
+ return check_dataset(data_file)
+
+
+def get_run_info(run_path):
+ run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))
+ run_id = run_path.stem
+ project = run_path.parent.stem
+ entity = run_path.parent.parent.stem
+ model_artifact_name = 'run_' + run_id + '_model'
+ return entity, project, run_id, model_artifact_name
+
+
+def check_wandb_resume(opt):
+ process_wandb_config_ddp_mode(opt) if RANK not in [-1, 0] else None
+ if isinstance(opt.resume, str):
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ if RANK not in [-1, 0]: # For resuming DDP runs
+ entity, project, run_id, model_artifact_name = get_run_info(opt.resume)
+ api = wandb.Api()
+ artifact = api.artifact(entity + '/' + project + '/' + model_artifact_name + ':latest')
+ modeldir = artifact.download()
+ opt.weights = str(Path(modeldir) / "last.pt")
+ return True
+ return None
+
+
+def process_wandb_config_ddp_mode(opt):
+ with open(check_file(opt.data), errors='ignore') as f:
+ data_dict = yaml.safe_load(f) # data dict
+ train_dir, val_dir = None, None
+ if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)
+ train_dir = train_artifact.download()
+ train_path = Path(train_dir) / 'data/images/'
+ data_dict['train'] = str(train_path)
+
+ if isinstance(data_dict['val'], str) and data_dict['val'].startswith(WANDB_ARTIFACT_PREFIX):
+ api = wandb.Api()
+ val_artifact = api.artifact(remove_prefix(data_dict['val']) + ':' + opt.artifact_alias)
+ val_dir = val_artifact.download()
+ val_path = Path(val_dir) / 'data/images/'
+ data_dict['val'] = str(val_path)
+ if train_dir or val_dir:
+ ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')
+ with open(ddp_data_path, 'w') as f:
+ yaml.safe_dump(data_dict, f)
+ opt.data = ddp_data_path
+
+
+class WandbLogger():
+ """Log training runs, datasets, models, and predictions to Weights & Biases.
+
+ This logger sends information to W&B at wandb.ai. By default, this information
+ includes hyperparameters, system configuration and metrics, model metrics,
+ and basic data metrics and analyses.
+
+ By providing additional command line arguments to train.py, datasets,
+ models and predictions can also be logged.
+
+ For more on how this logger is used, see the Weights & Biases documentation:
+ https://docs.wandb.com/guides/integrations/yolov5
+ """
+
+ def __init__(self, opt, run_id=None, job_type='Training'):
+ """
+ - Initialize WandbLogger instance
+ - Upload dataset if opt.upload_dataset is True
+ - Setup training processes if job_type is 'Training'
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ run_id (str) -- Run ID of W&B run to be resumed
+ job_type (str) -- To set the job_type for this run
+
+ """
+ # Pre-training routine --
+ self.job_type = job_type
+ self.wandb, self.wandb_run = wandb, None if not wandb else wandb.run
+ self.val_artifact, self.train_artifact = None, None
+ self.train_artifact_path, self.val_artifact_path = None, None
+ self.result_artifact = None
+ self.val_table, self.result_table = None, None
+ self.bbox_media_panel_images = []
+ self.val_table_path_map = None
+ self.max_imgs_to_log = 16
+ self.wandb_artifact_data_dict = None
+ self.data_dict = None
+ # It's more elegant to stick to 1 wandb.init call,
+ # but useful config data is overwritten in the WandbLogger's wandb.init call
+ if isinstance(opt.resume, str): # checks resume from artifact
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ entity, project, run_id, model_artifact_name = get_run_info(opt.resume)
+ model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name
+ assert wandb, 'install wandb to resume wandb runs'
+ # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config
+ self.wandb_run = wandb.init(id=run_id,
+ project=project,
+ entity=entity,
+ resume='allow',
+ allow_val_change=True)
+ opt.resume = model_artifact_name
+ elif self.wandb:
+ self.wandb_run = wandb.init(config=opt,
+ resume="allow",
+ project='YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem,
+ entity=opt.entity,
+ name=opt.name if opt.name != 'exp' else None,
+ job_type=job_type,
+ id=run_id,
+ allow_val_change=True) if not wandb.run else wandb.run
+ if self.wandb_run:
+ if self.job_type == 'Training':
+ if opt.upload_dataset:
+ if not opt.resume:
+ self.wandb_artifact_data_dict = self.check_and_upload_dataset(opt)
+
+ if isinstance(opt.data, dict):
+ # This means another dataset manager has already processed the dataset info (e.g. ClearML)
+ # and they will have stored the already processed dict in opt.data
+ self.data_dict = opt.data
+ elif opt.resume:
+ # resume from artifact
+ if isinstance(opt.resume, str) and opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ self.data_dict = dict(self.wandb_run.config.data_dict)
+ else: # local resume
+ self.data_dict = check_wandb_dataset(opt.data)
+ else:
+ self.data_dict = check_wandb_dataset(opt.data)
+ self.wandb_artifact_data_dict = self.wandb_artifact_data_dict or self.data_dict
+
+ # write data_dict to config. useful for resuming from artifacts. Do this only when not resuming.
+ self.wandb_run.config.update({'data_dict': self.wandb_artifact_data_dict}, allow_val_change=True)
+ self.setup_training(opt)
+
+ if self.job_type == 'Dataset Creation':
+ self.wandb_run.config.update({"upload_dataset": True})
+ self.data_dict = self.check_and_upload_dataset(opt)
+
+ def check_and_upload_dataset(self, opt):
+ """
+ Check if the dataset format is compatible and upload it as W&B artifact
+
+ arguments:
+ opt (namespace)-- Commandline arguments for current run
+
+ returns:
+ Updated dataset info dictionary where local dataset paths are replaced by WAND_ARFACT_PREFIX links.
+ """
+ assert wandb, 'Install wandb to upload dataset'
+ config_path = self.log_dataset_artifact(opt.data, opt.single_cls,
+ 'YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem)
+ with open(config_path, errors='ignore') as f:
+ wandb_data_dict = yaml.safe_load(f)
+ return wandb_data_dict
+
+ def setup_training(self, opt):
+ """
+ Setup the necessary processes for training YOLO models:
+ - Attempt to download model checkpoint and dataset artifacts if opt.resume stats with WANDB_ARTIFACT_PREFIX
+ - Update data_dict, to contain info of previous run if resumed and the paths of dataset artifact if downloaded
+ - Setup log_dict, initialize bbox_interval
+
+ arguments:
+ opt (namespace) -- commandline arguments for this run
+
+ """
+ self.log_dict, self.current_epoch = {}, 0
+ self.bbox_interval = opt.bbox_interval
+ if isinstance(opt.resume, str):
+ modeldir, _ = self.download_model_artifact(opt)
+ if modeldir:
+ self.weights = Path(modeldir) / "last.pt"
+ config = self.wandb_run.config
+ opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp, opt.imgsz = str(
+ self.weights), config.save_period, config.batch_size, config.bbox_interval, config.epochs,\
+ config.hyp, config.imgsz
+ data_dict = self.data_dict
+ if self.val_artifact is None: # If --upload_dataset is set, use the existing artifact, don't download
+ self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(
+ data_dict.get('train'), opt.artifact_alias)
+ self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(
+ data_dict.get('val'), opt.artifact_alias)
+
+ if self.train_artifact_path is not None:
+ train_path = Path(self.train_artifact_path) / 'data/images/'
+ data_dict['train'] = str(train_path)
+ if self.val_artifact_path is not None:
+ val_path = Path(self.val_artifact_path) / 'data/images/'
+ data_dict['val'] = str(val_path)
+
+ if self.val_artifact is not None:
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+ columns = ["epoch", "id", "ground truth", "prediction"]
+ columns.extend(self.data_dict['names'])
+ self.result_table = wandb.Table(columns)
+ self.val_table = self.val_artifact.get("val")
+ if self.val_table_path_map is None:
+ self.map_val_table_path()
+ if opt.bbox_interval == -1:
+ self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
+ if opt.evolve or opt.noplots:
+ self.bbox_interval = opt.bbox_interval = opt.epochs + 1 # disable bbox_interval
+ train_from_artifact = self.train_artifact_path is not None and self.val_artifact_path is not None
+ # Update the the data_dict to point to local artifacts dir
+ if train_from_artifact:
+ self.data_dict = data_dict
+
+ def download_dataset_artifact(self, path, alias):
+ """
+ download the model checkpoint artifact if the path starts with WANDB_ARTIFACT_PREFIX
+
+ arguments:
+ path -- path of the dataset to be used for training
+ alias (str)-- alias of the artifact to be download/used for training
+
+ returns:
+ (str, wandb.Artifact) -- path of the downladed dataset and it's corresponding artifact object if dataset
+ is found otherwise returns (None, None)
+ """
+ if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):
+ artifact_path = Path(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + ":" + alias)
+ dataset_artifact = wandb.use_artifact(artifact_path.as_posix().replace("\\", "/"))
+ assert dataset_artifact is not None, "'Error: W&B dataset artifact doesn\'t exist'"
+ datadir = dataset_artifact.download()
+ return datadir, dataset_artifact
+ return None, None
+
+ def download_model_artifact(self, opt):
+ """
+ download the model checkpoint artifact if the resume path starts with WANDB_ARTIFACT_PREFIX
+
+ arguments:
+ opt (namespace) -- Commandline arguments for this run
+ """
+ if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):
+ model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + ":latest")
+ assert model_artifact is not None, 'Error: W&B model artifact doesn\'t exist'
+ modeldir = model_artifact.download()
+ # epochs_trained = model_artifact.metadata.get('epochs_trained')
+ total_epochs = model_artifact.metadata.get('total_epochs')
+ is_finished = total_epochs is None
+ assert not is_finished, 'training is finished, can only resume incomplete runs.'
+ return modeldir, model_artifact
+ return None, None
+
+ def log_model(self, path, opt, epoch, fitness_score, best_model=False):
+ """
+ Log the model checkpoint as W&B artifact
+
+ arguments:
+ path (Path) -- Path of directory containing the checkpoints
+ opt (namespace) -- Command line arguments for this run
+ epoch (int) -- Current epoch number
+ fitness_score (float) -- fitness score for current epoch
+ best_model (boolean) -- Boolean representing if the current checkpoint is the best yet.
+ """
+ model_artifact = wandb.Artifact('run_' + wandb.run.id + '_model',
+ type='model',
+ metadata={
+ 'original_url': str(path),
+ 'epochs_trained': epoch + 1,
+ 'save period': opt.save_period,
+ 'project': opt.project,
+ 'total_epochs': opt.epochs,
+ 'fitness_score': fitness_score})
+ model_artifact.add_file(str(path / 'last.pt'), name='last.pt')
+ wandb.log_artifact(model_artifact,
+ aliases=['latest', 'last', 'epoch ' + str(self.current_epoch), 'best' if best_model else ''])
+ LOGGER.info(f"Saving model artifact on epoch {epoch + 1}")
+
+ def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):
+ """
+ Log the dataset as W&B artifact and return the new data file with W&B links
+
+ arguments:
+ data_file (str) -- the .yaml file with information about the dataset like - path, classes etc.
+ single_class (boolean) -- train multi-class data as single-class
+ project (str) -- project name. Used to construct the artifact path
+ overwrite_config (boolean) -- overwrites the data.yaml file if set to true otherwise creates a new
+ file with _wandb postfix. Eg -> data_wandb.yaml
+
+ returns:
+ the new .yaml file with artifact links. it can be used to start training directly from artifacts
+ """
+ upload_dataset = self.wandb_run.config.upload_dataset
+ log_val_only = isinstance(upload_dataset, str) and upload_dataset == 'val'
+ self.data_dict = check_dataset(data_file) # parse and check
+ data = dict(self.data_dict)
+ nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])
+ names = {k: v for k, v in enumerate(names)} # to index dictionary
+
+ # log train set
+ if not log_val_only:
+ self.train_artifact = self.create_dataset_table(LoadImagesAndLabels(data['train'], rect=True, batch_size=1),
+ names,
+ name='train') if data.get('train') else None
+ if data.get('train'):
+ data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')
+
+ self.val_artifact = self.create_dataset_table(
+ LoadImagesAndLabels(data['val'], rect=True, batch_size=1), names, name='val') if data.get('val') else None
+ if data.get('val'):
+ data['val'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'val')
+
+ path = Path(data_file)
+ # create a _wandb.yaml file with artifacts links if both train and test set are logged
+ if not log_val_only:
+ path = (path.stem if overwrite_config else path.stem + '_wandb') + '.yaml' # updated data.yaml path
+ path = ROOT / 'data' / path
+ data.pop('download', None)
+ data.pop('path', None)
+ with open(path, 'w') as f:
+ yaml.safe_dump(data, f)
+ LOGGER.info(f"Created dataset config file {path}")
+
+ if self.job_type == 'Training': # builds correct artifact pipeline graph
+ if not log_val_only:
+ self.wandb_run.log_artifact(
+ self.train_artifact) # calling use_artifact downloads the dataset. NOT NEEDED!
+ self.wandb_run.use_artifact(self.val_artifact)
+ self.val_artifact.wait()
+ self.val_table = self.val_artifact.get('val')
+ self.map_val_table_path()
+ else:
+ self.wandb_run.log_artifact(self.train_artifact)
+ self.wandb_run.log_artifact(self.val_artifact)
+ return path
+
+ def map_val_table_path(self):
+ """
+ Map the validation dataset Table like name of file -> it's id in the W&B Table.
+ Useful for - referencing artifacts for evaluation.
+ """
+ self.val_table_path_map = {}
+ LOGGER.info("Mapping dataset")
+ for i, data in enumerate(tqdm(self.val_table.data)):
+ self.val_table_path_map[data[3]] = data[0]
+
+ def create_dataset_table(self, dataset: LoadImagesAndLabels, class_to_id: Dict[int, str], name: str = 'dataset'):
+ """
+ Create and return W&B artifact containing W&B Table of the dataset.
+
+ arguments:
+ dataset -- instance of LoadImagesAndLabels class used to iterate over the data to build Table
+ class_to_id -- hash map that maps class ids to labels
+ name -- name of the artifact
+
+ returns:
+ dataset artifact to be logged or used
+ """
+ # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging
+ artifact = wandb.Artifact(name=name, type="dataset")
+ img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None
+ img_files = tqdm(dataset.im_files) if not img_files else img_files
+ for img_file in img_files:
+ if Path(img_file).is_dir():
+ artifact.add_dir(img_file, name='data/images')
+ labels_path = 'labels'.join(dataset.path.rsplit('images', 1))
+ artifact.add_dir(labels_path, name='data/labels')
+ else:
+ artifact.add_file(img_file, name='data/images/' + Path(img_file).name)
+ label_file = Path(img2label_paths([img_file])[0])
+ artifact.add_file(str(label_file), name='data/labels/' +
+ label_file.name) if label_file.exists() else None
+ table = wandb.Table(columns=["id", "train_image", "Classes", "name"])
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])
+ for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):
+ box_data, img_classes = [], {}
+ for cls, *xywh in labels[:, 1:].tolist():
+ cls = int(cls)
+ box_data.append({
+ "position": {
+ "middle": [xywh[0], xywh[1]],
+ "width": xywh[2],
+ "height": xywh[3]},
+ "class_id": cls,
+ "box_caption": "%s" % (class_to_id[cls])})
+ img_classes[cls] = class_to_id[cls]
+ boxes = {"ground_truth": {"box_data": box_data, "class_labels": class_to_id}} # inference-space
+ table.add_data(si, wandb.Image(paths, classes=class_set, boxes=boxes), list(img_classes.values()),
+ Path(paths).name)
+ artifact.add(table, name)
+ return artifact
+
+ def log_training_progress(self, predn, path, names):
+ """
+ Build evaluation Table. Uses reference from validation dataset table.
+
+ arguments:
+ predn (list): list of predictions in the native space in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ path (str): local path of the current evaluation image
+ names (dict(int, str)): hash map that maps class ids to labels
+ """
+ class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])
+ box_data = []
+ avg_conf_per_class = [0] * len(self.data_dict['names'])
+ pred_class_count = {}
+ for *xyxy, conf, cls in predn.tolist():
+ if conf >= 0.25:
+ cls = int(cls)
+ box_data.append({
+ "position": {
+ "minX": xyxy[0],
+ "minY": xyxy[1],
+ "maxX": xyxy[2],
+ "maxY": xyxy[3]},
+ "class_id": cls,
+ "box_caption": f"{names[cls]} {conf:.3f}",
+ "scores": {
+ "class_score": conf},
+ "domain": "pixel"})
+ avg_conf_per_class[cls] += conf
+
+ if cls in pred_class_count:
+ pred_class_count[cls] += 1
+ else:
+ pred_class_count[cls] = 1
+
+ for pred_class in pred_class_count.keys():
+ avg_conf_per_class[pred_class] = avg_conf_per_class[pred_class] / pred_class_count[pred_class]
+
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ id = self.val_table_path_map[Path(path).name]
+ self.result_table.add_data(self.current_epoch, id, self.val_table.data[id][1],
+ wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),
+ *avg_conf_per_class)
+
+ def val_one_image(self, pred, predn, path, names, im):
+ """
+ Log validation data for one image. updates the result Table if validation dataset is uploaded and log bbox media panel
+
+ arguments:
+ pred (list): list of scaled predictions in the format - [xmin, ymin, xmax, ymax, confidence, class]
+ predn (list): list of predictions in the native space - [xmin, ymin, xmax, ymax, confidence, class]
+ path (str): local path of the current evaluation image
+ """
+ if self.val_table and self.result_table: # Log Table if Val dataset is uploaded as artifact
+ self.log_training_progress(predn, path, names)
+
+ if len(self.bbox_media_panel_images) < self.max_imgs_to_log and self.current_epoch > 0:
+ if self.current_epoch % self.bbox_interval == 0:
+ box_data = [{
+ "position": {
+ "minX": xyxy[0],
+ "minY": xyxy[1],
+ "maxX": xyxy[2],
+ "maxY": xyxy[3]},
+ "class_id": int(cls),
+ "box_caption": f"{names[int(cls)]} {conf:.3f}",
+ "scores": {
+ "class_score": conf},
+ "domain": "pixel"} for *xyxy, conf, cls in pred.tolist()]
+ boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
+ self.bbox_media_panel_images.append(wandb.Image(im, boxes=boxes, caption=path.name))
+
+ def log(self, log_dict):
+ """
+ save the metrics to the logging dictionary
+
+ arguments:
+ log_dict (Dict) -- metrics/media to be logged in current step
+ """
+ if self.wandb_run:
+ for key, value in log_dict.items():
+ self.log_dict[key] = value
+
+ def end_epoch(self, best_result=False):
+ """
+ commit the log_dict, model artifacts and Tables to W&B and flush the log_dict.
+
+ arguments:
+ best_result (boolean): Boolean representing if the result of this evaluation is best or not
+ """
+ if self.wandb_run:
+ with all_logging_disabled():
+ if self.bbox_media_panel_images:
+ self.log_dict["BoundingBoxDebugger"] = self.bbox_media_panel_images
+ try:
+ wandb.log(self.log_dict)
+ except BaseException as e:
+ LOGGER.info(
+ f"An error occurred in wandb logger. The training will proceed without interruption. More info\n{e}"
+ )
+ self.wandb_run.finish()
+ self.wandb_run = None
+
+ self.log_dict = {}
+ self.bbox_media_panel_images = []
+ if self.result_artifact:
+ self.result_artifact.add(self.result_table, 'result')
+ wandb.log_artifact(self.result_artifact,
+ aliases=[
+ 'latest', 'last', 'epoch ' + str(self.current_epoch),
+ ('best' if best_result else '')])
+
+ wandb.log({"evaluation": self.result_table})
+ columns = ["epoch", "id", "ground truth", "prediction"]
+ columns.extend(self.data_dict['names'])
+ self.result_table = wandb.Table(columns)
+ self.result_artifact = wandb.Artifact("run_" + wandb.run.id + "_progress", "evaluation")
+
+ def finish_run(self):
+ """
+ Log metrics if any and finish the current W&B run
+ """
+ if self.wandb_run:
+ if self.log_dict:
+ with all_logging_disabled():
+ wandb.log(self.log_dict)
+ wandb.run.finish()
+
+
+@contextmanager
+def all_logging_disabled(highest_level=logging.CRITICAL):
+ """ source - https://gist.github.com/simon-weber/7853144
+ A context manager that will prevent any logging messages triggered during the body from being processed.
+ :param highest_level: the maximum logging level in use.
+ This would only need to be changed if a custom level greater than CRITICAL is defined.
+ """
+ previous_level = logging.root.manager.disable
+ logging.disable(highest_level)
+ try:
+ yield
+ finally:
+ logging.disable(previous_level)
diff --git a/yolov7_seg/seg/utils/loss.py b/yolov7_seg/seg/utils/loss.py
new file mode 100644
index 000000000..2d42acd03
--- /dev/null
+++ b/yolov7_seg/seg/utils/loss.py
@@ -0,0 +1,234 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Loss functions
+"""
+
+import torch
+import torch.nn as nn
+
+from utils.metrics import bbox_iou
+from utils.torch_utils import de_parallel
+
+
+def smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441
+ # return positive, negative label smoothing BCE targets
+ return 1.0 - 0.5 * eps, 0.5 * eps
+
+
+class BCEBlurWithLogitsLoss(nn.Module):
+ # BCEwithLogitLoss() with reduced missing label effects.
+ def __init__(self, alpha=0.05):
+ super().__init__()
+ self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
+ self.alpha = alpha
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ pred = torch.sigmoid(pred) # prob from logits
+ dx = pred - true # reduce only missing label effects
+ # dx = (pred - true).abs() # reduce missing label and false label effects
+ alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
+ loss *= alpha_factor
+ return loss.mean()
+
+
+class FocalLoss(nn.Module):
+ # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super().__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+ # p_t = torch.exp(-loss)
+ # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
+
+ # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = (1.0 - p_t) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class QFocalLoss(nn.Module):
+ # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
+ def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
+ super().__init__()
+ self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
+ self.gamma = gamma
+ self.alpha = alpha
+ self.reduction = loss_fcn.reduction
+ self.loss_fcn.reduction = 'none' # required to apply FL to each element
+
+ def forward(self, pred, true):
+ loss = self.loss_fcn(pred, true)
+
+ pred_prob = torch.sigmoid(pred) # prob from logits
+ alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
+ modulating_factor = torch.abs(true - pred_prob) ** self.gamma
+ loss *= alpha_factor * modulating_factor
+
+ if self.reduction == 'mean':
+ return loss.mean()
+ elif self.reduction == 'sum':
+ return loss.sum()
+ else: # 'none'
+ return loss
+
+
+class ComputeLoss:
+ sort_obj_iou = False
+
+ # Compute losses
+ def __init__(self, model, autobalance=False):
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ m = de_parallel(model).model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
+ self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
+ self.na = m.na # number of anchors
+ self.nc = m.nc # number of classes
+ self.nl = m.nl # number of layers
+ self.anchors = m.anchors
+ self.device = device
+
+ def __call__(self, p, targets): # predictions, targets
+ lcls = torch.zeros(1, device=self.device) # class loss
+ lbox = torch.zeros(1, device=self.device) # box loss
+ lobj = torch.zeros(1, device=self.device) # object loss
+ tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ # pxy, pwh, _, pcls = pi[b, a, gj, gi].tensor_split((2, 4, 5), dim=1) # faster, requires torch 1.8.0
+ pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions
+
+ # Regression
+ pxy = pxy.sigmoid() * 2 - 0.5
+ pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ iou = iou.detach().clamp(0).type(tobj.dtype)
+ if self.sort_obj_iou:
+ j = iou.argsort()
+ b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
+ if self.gr < 1:
+ iou = (1.0 - self.gr) + self.gr * iou
+ tobj[b, a, gj, gi] = iou # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(pcls, self.cn, device=self.device) # targets
+ t[range(n), tcls[i]] = self.cp
+ lcls += self.BCEcls(pcls, t) # BCE
+
+ # Append targets to text file
+ # with open('targets.txt', 'a') as file:
+ # [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp['box']
+ lobj *= self.hyp['obj']
+ lcls *= self.hyp['cls']
+ bs = tobj.shape[0] # batch size
+
+ return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch = [], [], [], []
+ gain = torch.ones(7, device=self.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor(
+ [
+ [0, 0],
+ [1, 0],
+ [0, 1],
+ [-1, 0],
+ [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ],
+ device=self.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors, shape = self.anchors[i], p[i].shape
+ gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain # shape(3,n,7)
+ if nt:
+ # Matches
+ r = t[..., 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1 < g) & (gxy > 1)).T
+ l, m = ((gxi % 1 < g) & (gxi > 1)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ bc, gxy, gwh, a = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
+ a, (b, c) = a.long().view(-1), bc.long().T # anchors, image, class
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid indices
+
+ # Append
+ indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+
+ return tcls, tbox, indices, anch
diff --git a/yolov7_seg/seg/utils/metrics.py b/yolov7_seg/seg/utils/metrics.py
new file mode 100644
index 000000000..ca335c655
--- /dev/null
+++ b/yolov7_seg/seg/utils/metrics.py
@@ -0,0 +1,367 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Model validation metrics
+"""
+
+import math
+import warnings
+from pathlib import Path
+
+import matplotlib.pyplot as plt
+import numpy as np
+import torch
+
+from utils import TryExcept, threaded
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
+ return (x[:, :4] * w).sum(1)
+
+
+def smooth(y, f=0.05):
+ # Box filter of fraction f
+ nf = round(len(y) * f * 2) // 2 + 1 # number of filter elements (must be odd)
+ p = np.ones(nf // 2) # ones padding
+ yp = np.concatenate((p * y[0], y, p * y[-1]), 0) # y padded
+ return np.convolve(yp, np.ones(nf) / nf, mode='valid') # y-smoothed
+
+
+def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16, prefix=""):
+ """ Compute the average precision, given the recall and precision curves.
+ Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
+ # Arguments
+ tp: True positives (nparray, nx1 or nx10).
+ conf: Objectness value from 0-1 (nparray).
+ pred_cls: Predicted object classes (nparray).
+ target_cls: True object classes (nparray).
+ plot: Plot precision-recall curve at mAP@0.5
+ save_dir: Plot save directory
+ # Returns
+ The average precision as computed in py-faster-rcnn.
+ """
+
+ # Sort by objectness
+ i = np.argsort(-conf)
+ tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
+
+ # Find unique classes
+ unique_classes, nt = np.unique(target_cls, return_counts=True)
+ nc = unique_classes.shape[0] # number of classes, number of detections
+
+ # Create Precision-Recall curve and compute AP for each class
+ px, py = np.linspace(0, 1, 1000), [] # for plotting
+ ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
+ for ci, c in enumerate(unique_classes):
+ i = pred_cls == c
+ n_l = nt[ci] # number of labels
+ n_p = i.sum() # number of predictions
+ if n_p == 0 or n_l == 0:
+ continue
+
+ # Accumulate FPs and TPs
+ fpc = (1 - tp[i]).cumsum(0)
+ tpc = tp[i].cumsum(0)
+
+ # Recall
+ recall = tpc / (n_l + eps) # recall curve
+ r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
+
+ # Precision
+ precision = tpc / (tpc + fpc) # precision curve
+ p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
+
+ # AP from recall-precision curve
+ for j in range(tp.shape[1]):
+ ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
+ if plot and j == 0:
+ py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
+
+ # Compute F1 (harmonic mean of precision and recall)
+ f1 = 2 * p * r / (p + r + eps)
+ names = [v for k, v in names.items() if k in unique_classes] # list: only classes that have data
+ names = dict(enumerate(names)) # to dict
+ if plot:
+ plot_pr_curve(px, py, ap, Path(save_dir) / f'{prefix}PR_curve.png', names)
+ plot_mc_curve(px, f1, Path(save_dir) / f'{prefix}F1_curve.png', names, ylabel='F1')
+ plot_mc_curve(px, p, Path(save_dir) / f'{prefix}P_curve.png', names, ylabel='Precision')
+ plot_mc_curve(px, r, Path(save_dir) / f'{prefix}R_curve.png', names, ylabel='Recall')
+
+ i = smooth(f1.mean(0), 0.1).argmax() # max F1 index
+ p, r, f1 = p[:, i], r[:, i], f1[:, i]
+ tp = (r * nt).round() # true positives
+ fp = (tp / (p + eps) - tp).round() # false positives
+ return tp, fp, p, r, f1, ap, unique_classes.astype(int)
+
+
+def compute_ap(recall, precision):
+ """ Compute the average precision, given the recall and precision curves
+ # Arguments
+ recall: The recall curve (list)
+ precision: The precision curve (list)
+ # Returns
+ Average precision, precision curve, recall curve
+ """
+
+ # Append sentinel values to beginning and end
+ mrec = np.concatenate(([0.0], recall, [1.0]))
+ mpre = np.concatenate(([1.0], precision, [0.0]))
+
+ # Compute the precision envelope
+ mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
+
+ # Integrate area under curve
+ method = 'interp' # methods: 'continuous', 'interp'
+ if method == 'interp':
+ x = np.linspace(0, 1, 101) # 101-point interp (COCO)
+ ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
+ else: # 'continuous'
+ i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
+ ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
+
+ return ap, mpre, mrec
+
+
+class ConfusionMatrix:
+ # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
+ def __init__(self, nc, conf=0.25, iou_thres=0.45):
+ self.matrix = np.zeros((nc + 1, nc + 1))
+ self.nc = nc # number of classes
+ self.conf = conf
+ self.iou_thres = iou_thres
+
+ def process_batch(self, detections, labels):
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ detections (Array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (Array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ None, updates confusion matrix accordingly
+ """
+ if detections is None:
+ gt_classes = labels.int()
+ for gc in gt_classes:
+ self.matrix[self.nc, gc] += 1 # background FN
+ return
+
+ detections = detections[detections[:, 4] > self.conf]
+ gt_classes = labels[:, 0].int()
+ detection_classes = detections[:, 5].int()
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+
+ x = torch.where(iou > self.iou_thres)
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ else:
+ matches = np.zeros((0, 3))
+
+ n = matches.shape[0] > 0
+ m0, m1, _ = matches.transpose().astype(int)
+ for i, gc in enumerate(gt_classes):
+ j = m0 == i
+ if n and sum(j) == 1:
+ self.matrix[detection_classes[m1[j]], gc] += 1 # correct
+ else:
+ self.matrix[self.nc, gc] += 1 # background FP
+
+ if n:
+ for i, dc in enumerate(detection_classes):
+ if not any(m1 == i):
+ self.matrix[dc, self.nc] += 1 # background FN
+
+ def matrix(self):
+ return self.matrix
+
+ def tp_fp(self):
+ tp = self.matrix.diagonal() # true positives
+ fp = self.matrix.sum(1) - tp # false positives
+ # fn = self.matrix.sum(0) - tp # false negatives (missed detections)
+ return tp[:-1], fp[:-1] # remove background class
+
+ @TryExcept('WARNING: ConfusionMatrix plot failure')
+ def plot(self, normalize=True, save_dir='', names=()):
+ import seaborn as sn
+
+ array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-9) if normalize else 1) # normalize columns
+ array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
+
+ fig, ax = plt.subplots(1, 1, figsize=(12, 9), tight_layout=True)
+ nc, nn = self.nc, len(names) # number of classes, names
+ sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size
+ labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels
+ with warnings.catch_warnings():
+ warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered
+ sn.heatmap(array,
+ ax=ax,
+ annot=nc < 30,
+ annot_kws={
+ "size": 8},
+ cmap='Blues',
+ fmt='.2f',
+ square=True,
+ vmin=0.0,
+ xticklabels=names + ['background FP'] if labels else "auto",
+ yticklabels=names + ['background FN'] if labels else "auto").set_facecolor((1, 1, 1))
+ ax.set_ylabel('True')
+ ax.set_ylabel('Predicted')
+ ax.set_title('Confusion Matrix')
+ fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
+ plt.close(fig)
+
+ def print(self):
+ for i in range(self.nc + 1):
+ print(' '.join(map(str, self.matrix[i])))
+
+
+def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
+ # Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)
+
+ # Get the coordinates of bounding boxes
+ if xywh: # transform from xywh to xyxy
+ (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, 1), box2.chunk(4, 1)
+ w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
+ b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
+ b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
+ else: # x1, y1, x2, y2 = box1
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, 1)
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, 1)
+ w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1
+ w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1
+
+ # Intersection area
+ inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
+ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
+
+ # Union Area
+ union = w1 * h1 + w2 * h2 - inter + eps
+
+ # IoU
+ iou = inter / union
+ if CIoU or DIoU or GIoU:
+ cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
+ ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
+ if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
+ c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
+ rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2
+ if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
+ v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
+ with torch.no_grad():
+ alpha = v / (v - iou + (1 + eps))
+ return iou - (rho2 / c2 + v * alpha) # CIoU
+ return iou - rho2 / c2 # DIoU
+ c_area = cw * ch + eps # convex area
+ return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
+ return iou # IoU
+
+
+def box_area(box):
+ # box = xyxy(4,n)
+ return (box[2] - box[0]) * (box[3] - box[1])
+
+
+def box_iou(box1, box2, eps=1e-7):
+ # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
+ """
+ Return intersection-over-union (Jaccard index) of boxes.
+ Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
+ Arguments:
+ box1 (Tensor[N, 4])
+ box2 (Tensor[M, 4])
+ Returns:
+ iou (Tensor[N, M]): the NxM matrix containing the pairwise
+ IoU values for every element in boxes1 and boxes2
+ """
+
+ # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
+ (a1, a2), (b1, b2) = box1[:, None].chunk(2, 2), box2.chunk(2, 1)
+ inter = (torch.min(a2, b2) - torch.max(a1, b1)).clamp(0).prod(2)
+
+ # IoU = inter / (area1 + area2 - inter)
+ return inter / (box_area(box1.T)[:, None] + box_area(box2.T) - inter + eps)
+
+
+def bbox_ioa(box1, box2, eps=1e-7):
+ """ Returns the intersection over box2 area given box1, box2. Boxes are x1y1x2y2
+ box1: np.array of shape(4)
+ box2: np.array of shape(nx4)
+ returns: np.array of shape(n)
+ """
+
+ # Get the coordinates of bounding boxes
+ b1_x1, b1_y1, b1_x2, b1_y2 = box1
+ b2_x1, b2_y1, b2_x2, b2_y2 = box2.T
+
+ # Intersection area
+ inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
+ (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)
+
+ # box2 area
+ box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + eps
+
+ # Intersection over box2 area
+ return inter_area / box2_area
+
+
+def wh_iou(wh1, wh2, eps=1e-7):
+ # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
+ wh1 = wh1[:, None] # [N,1,2]
+ wh2 = wh2[None] # [1,M,2]
+ inter = torch.min(wh1, wh2).prod(2) # [N,M]
+ return inter / (wh1.prod(2) + wh2.prod(2) - inter + eps) # iou = inter / (area1 + area2 - inter)
+
+
+# Plots ----------------------------------------------------------------------------------------------------------------
+
+
+@threaded
+def plot_pr_curve(px, py, ap, save_dir=Path('pr_curve.png'), names=()):
+ # Precision-recall curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+ py = np.stack(py, axis=1)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py.T):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)
+ else:
+ ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)
+
+ ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())
+ ax.set_xlabel('Recall')
+ ax.set_ylabel('Precision')
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ ax.set_title('Precision-Recall Curve')
+ fig.savefig(save_dir, dpi=250)
+ plt.close(fig)
+
+
+@threaded
+def plot_mc_curve(px, py, save_dir=Path('mc_curve.png'), names=(), xlabel='Confidence', ylabel='Metric'):
+ # Metric-confidence curve
+ fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
+
+ if 0 < len(names) < 21: # display per-class legend if < 21 classes
+ for i, y in enumerate(py):
+ ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)
+ else:
+ ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)
+
+ y = smooth(py.mean(0), 0.05)
+ ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')
+ ax.set_xlabel(xlabel)
+ ax.set_ylabel(ylabel)
+ ax.set_xlim(0, 1)
+ ax.set_ylim(0, 1)
+ ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
+ ax.set_title(f'{ylabel}-Confidence Curve')
+ fig.savefig(save_dir, dpi=250)
+ plt.close(fig)
diff --git a/yolov7_seg/seg/utils/plots.py b/yolov7_seg/seg/utils/plots.py
new file mode 100644
index 000000000..8b5d5db2e
--- /dev/null
+++ b/yolov7_seg/seg/utils/plots.py
@@ -0,0 +1,529 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Plotting utils
+"""
+
+import contextlib
+import math
+import os
+from copy import copy
+from pathlib import Path
+from urllib.error import URLError
+
+import cv2
+import matplotlib
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import seaborn as sn
+import torch
+from PIL import Image, ImageDraw, ImageFont
+
+from utils import TryExcept, threaded
+from utils.general import (CONFIG_DIR, FONT, LOGGER, check_font, check_requirements, clip_coords, increment_path,
+ is_ascii, xywh2xyxy, xyxy2xywh)
+from utils.metrics import fitness
+
+# Settings
+RANK = int(os.getenv('RANK', -1))
+matplotlib.rc('font', **{'size': 11})
+matplotlib.use('Agg') # for writing to files only
+
+
+class Colors:
+ # Ultralytics color palette https://ultralytics.com/
+ def __init__(self):
+ # hex = matplotlib.colors.TABLEAU_COLORS.values()
+ hexs = ('FF3838', 'FF9D97', 'FF701F', 'FFB21D', 'CFD231', '48F90A', '92CC17', '3DDB86', '1A9334', '00D4BB',
+ '2C99A8', '00C2FF', '344593', '6473FF', '0018EC', '8438FF', '520085', 'CB38FF', 'FF95C8', 'FF37C7')
+ self.palette = [self.hex2rgb(f'#{c}') for c in hexs]
+ self.n = len(self.palette)
+
+ def __call__(self, i, bgr=False):
+ c = self.palette[int(i) % self.n]
+ return (c[2], c[1], c[0]) if bgr else c
+
+ @staticmethod
+ def hex2rgb(h): # rgb order (PIL)
+ return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))
+
+
+colors = Colors() # create instance for 'from utils.plots import colors'
+
+
+def check_pil_font(font=FONT, size=10):
+ # Return a PIL TrueType Font, downloading to CONFIG_DIR if necessary
+ font = Path(font)
+ font = font if font.exists() else (CONFIG_DIR / font.name)
+ try:
+ return ImageFont.truetype(str(font) if font.exists() else font.name, size)
+ except Exception: # download if missing
+ try:
+ check_font(font)
+ return ImageFont.truetype(str(font), size)
+ except TypeError:
+ check_requirements('Pillow>=8.4.0') # known issue https://github.com/ultralytics/yolov5/issues/5374
+ except URLError: # not online
+ return ImageFont.load_default()
+
+
+class Annotator:
+ # YOLOv5 Annotator for train/val mosaics and jpgs and detect/hub inference annotations
+ def __init__(self, im, line_width=None, font_size=None, font='Arial.ttf', pil=False, example='abc'):
+ assert im.data.contiguous, 'Image not contiguous. Apply np.ascontiguousarray(im) to Annotator() input images.'
+ non_ascii = not is_ascii(example) # non-latin labels, i.e. asian, arabic, cyrillic
+ self.pil = pil or non_ascii
+ if self.pil: # use PIL
+ self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
+ self.draw = ImageDraw.Draw(self.im)
+ self.font = check_pil_font(font='Arial.Unicode.ttf' if non_ascii else font,
+ size=font_size or max(round(sum(self.im.size) / 2 * 0.035), 12))
+ else: # use cv2
+ self.im = im
+ self.lw = line_width or max(round(sum(im.shape) / 2 * 0.003), 2) # line width
+
+ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 255)):
+ # Add one xyxy box to image with label
+ if self.pil or not is_ascii(label):
+ self.draw.rectangle(box, width=self.lw, outline=color) # box
+ if label:
+ w, h = self.font.getsize(label) # text width, height
+ outside = box[1] - h >= 0 # label fits outside box
+ self.draw.rectangle(
+ (box[0], box[1] - h if outside else box[1], box[0] + w + 1,
+ box[1] + 1 if outside else box[1] + h + 1),
+ fill=color,
+ )
+ # self.draw.text((box[0], box[1]), label, fill=txt_color, font=self.font, anchor='ls') # for PIL>8.0
+ self.draw.text((box[0], box[1] - h if outside else box[1]), label, fill=txt_color, font=self.font)
+ else: # cv2
+ p1, p2 = (int(box[0]), int(box[1])), (int(box[2]), int(box[3]))
+ cv2.rectangle(self.im, p1, p2, color, thickness=self.lw, lineType=cv2.LINE_AA)
+ if label:
+ tf = max(self.lw - 1, 1) # font thickness
+ w, h = cv2.getTextSize(label, 0, fontScale=self.lw / 3, thickness=tf)[0] # text width, height
+ outside = p1[1] - h >= 3
+ p2 = p1[0] + w, p1[1] - h - 3 if outside else p1[1] + h + 3
+ cv2.rectangle(self.im, p1, p2, color, -1, cv2.LINE_AA) # filled
+ cv2.putText(self.im,
+ label, (p1[0], p1[1] - 2 if outside else p1[1] + h + 2),
+ 0,
+ self.lw / 3,
+ txt_color,
+ thickness=tf,
+ lineType=cv2.LINE_AA)
+
+ def rectangle(self, xy, fill=None, outline=None, width=1):
+ # Add rectangle to image (PIL-only)
+ self.draw.rectangle(xy, fill, outline, width)
+
+ def text(self, xy, text, txt_color=(255, 255, 255), anchor='top'):
+ # Add text to image (PIL-only)
+ if anchor == 'bottom': # start y from font bottom
+ w, h = self.font.getsize(text) # text width, height
+ xy[1] += 1 - h
+ self.draw.text(xy, text, fill=txt_color, font=self.font)
+
+ def fromarray(self, im):
+ # Update self.im from a numpy array
+ self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)
+ self.draw = ImageDraw.Draw(self.im)
+
+ def result(self):
+ # Return annotated image as array
+ return np.asarray(self.im)
+
+
+def feature_visualization(x, module_type, stage, n=32, save_dir=Path('runs/detect/exp')):
+ """
+ x: Features to be visualized
+ module_type: Module type
+ stage: Module stage within model
+ n: Maximum number of feature maps to plot
+ save_dir: Directory to save results
+ """
+ if 'Detect' not in module_type:
+ batch, channels, height, width = x.shape # batch, channels, height, width
+ if height > 1 and width > 1:
+ f = save_dir / f"stage{stage}_{module_type.split('.')[-1]}_features.png" # filename
+
+ blocks = torch.chunk(x[0].cpu(), channels, dim=0) # select batch index 0, block by channels
+ n = min(n, channels) # number of plots
+ fig, ax = plt.subplots(math.ceil(n / 8), 8, tight_layout=True) # 8 rows x n/8 cols
+ ax = ax.ravel()
+ plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze()) # cmap='gray'
+ ax[i].axis('off')
+
+ LOGGER.info(f'Saving {f}... ({n}/{channels})')
+ plt.title('Features')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ np.save(str(f.with_suffix('.npy')), x[0].cpu().numpy()) # npy save
+
+
+def hist2d(x, y, n=100):
+ # 2d histogram used in labels.png and evolve.png
+ xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
+ hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
+ xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
+ yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
+ return np.log(hist[xidx, yidx])
+
+
+def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
+ from scipy.signal import butter, filtfilt
+
+ # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
+ def butter_lowpass(cutoff, fs, order):
+ nyq = 0.5 * fs
+ normal_cutoff = cutoff / nyq
+ return butter(order, normal_cutoff, btype='low', analog=False)
+
+ b, a = butter_lowpass(cutoff, fs, order=order)
+ return filtfilt(b, a, data) # forward-backward filter
+
+
+def output_to_target(output, max_det=300):
+ # Convert model output to target format [batch_id, class_id, x, y, w, h, conf] for plotting
+ targets = []
+ for i, o in enumerate(output):
+ box, conf, cls = o[:max_det, :6].cpu().split((4, 1, 1), 1)
+ j = torch.full((conf.shape[0], 1), i)
+ targets.append(torch.cat((j, cls, xyxy2xywh(box), conf), 1))
+ return torch.cat(targets, 0).numpy()
+
+
+@threaded
+def plot_images(images, targets, paths=None, fname='images.jpg', names=None):
+ # Plot image grid with labels
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+
+ max_size = 1920 # max image size
+ max_subplots = 16 # max image subplots, i.e. 4x4
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
+
+ # Build Image
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, im in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ im = im.transpose(1, 2, 0)
+ mosaic[y:y + h, x:x + w, :] = im
+
+ # Resize (optional)
+ scale = max_size / ns / max(h, w)
+ if scale < 1:
+ h = math.ceil(scale * h)
+ w = math.ceil(scale * w)
+ mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
+
+ # Annotate
+ fs = int((h + w) * ns * 0.01) # font size
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
+ for i in range(i + 1):
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
+ if paths:
+ annotator.text((x + 5, y + 5), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ if len(targets) > 0:
+ ti = targets[targets[:, 0] == i] # image targets
+ boxes = xywh2xyxy(ti[:, 2:6]).T
+ classes = ti[:, 1].astype('int')
+ labels = ti.shape[1] == 6 # labels if no conf column
+ conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale < 1: # absolute coords need scale if image scales
+ boxes *= scale
+ boxes[[0, 2]] += x
+ boxes[[1, 3]] += y
+ for j, box in enumerate(boxes.T.tolist()):
+ cls = classes[j]
+ color = colors(cls)
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'
+ annotator.box_label(box, label, color=color)
+ annotator.im.save(fname) # save
+
+
+def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):
+ # Plot LR simulating training for full epochs
+ optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
+ y = []
+ for _ in range(epochs):
+ scheduler.step()
+ y.append(optimizer.param_groups[0]['lr'])
+ plt.plot(y, '.-', label='LR')
+ plt.xlabel('epoch')
+ plt.ylabel('LR')
+ plt.grid()
+ plt.xlim(0, epochs)
+ plt.ylim(0)
+ plt.savefig(Path(save_dir) / 'LR.png', dpi=200)
+ plt.close()
+
+
+def plot_val_txt(): # from utils.plots import *; plot_val()
+ # Plot val.txt histograms
+ x = np.loadtxt('val.txt', dtype=np.float32)
+ box = xyxy2xywh(x[:, :4])
+ cx, cy = box[:, 0], box[:, 1]
+
+ fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
+ ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
+ ax.set_aspect('equal')
+ plt.savefig('hist2d.png', dpi=300)
+
+ fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
+ ax[0].hist(cx, bins=600)
+ ax[1].hist(cy, bins=600)
+ plt.savefig('hist1d.png', dpi=200)
+
+
+def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
+ # Plot targets.txt histograms
+ x = np.loadtxt('targets.txt', dtype=np.float32).T
+ s = ['x targets', 'y targets', 'width targets', 'height targets']
+ fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
+ ax = ax.ravel()
+ for i in range(4):
+ ax[i].hist(x[i], bins=100, label=f'{x[i].mean():.3g} +/- {x[i].std():.3g}')
+ ax[i].legend()
+ ax[i].set_title(s[i])
+ plt.savefig('targets.jpg', dpi=200)
+
+
+def plot_val_study(file='', dir='', x=None): # from utils.plots import *; plot_val_study()
+ # Plot file=study.txt generated by val.py (or plot all study*.txt in dir)
+ save_dir = Path(file).parent if file else Path(dir)
+ plot2 = False # plot additional results
+ if plot2:
+ ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)[1].ravel()
+
+ fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
+ # for f in [save_dir / f'study_coco_{x}.txt' for x in ['yolov5n6', 'yolov5s6', 'yolov5m6', 'yolov5l6', 'yolov5x6']]:
+ for f in sorted(save_dir.glob('study*.txt')):
+ y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
+ x = np.arange(y.shape[1]) if x is None else np.array(x)
+ if plot2:
+ s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_preprocess (ms/img)', 't_inference (ms/img)', 't_NMS (ms/img)']
+ for i in range(7):
+ ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)
+ ax[i].set_title(s[i])
+
+ j = y[3].argmax() + 1
+ ax2.plot(y[5, 1:j],
+ y[3, 1:j] * 1E2,
+ '.-',
+ linewidth=2,
+ markersize=8,
+ label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO'))
+
+ ax2.plot(1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
+ 'k.-',
+ linewidth=2,
+ markersize=8,
+ alpha=.25,
+ label='EfficientDet')
+
+ ax2.grid(alpha=0.2)
+ ax2.set_yticks(np.arange(20, 60, 5))
+ ax2.set_xlim(0, 57)
+ ax2.set_ylim(25, 55)
+ ax2.set_xlabel('GPU Speed (ms/img)')
+ ax2.set_ylabel('COCO AP val')
+ ax2.legend(loc='lower right')
+ f = save_dir / 'study.png'
+ print(f'Saving {f}...')
+ plt.savefig(f, dpi=300)
+
+
+@TryExcept() # known issue https://github.com/ultralytics/yolov5/issues/5395
+def plot_labels(labels, names=(), save_dir=Path('')):
+ # plot dataset labels
+ LOGGER.info(f"Plotting labels to {save_dir / 'labels.jpg'}... ")
+ c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
+ nc = int(c.max() + 1) # number of classes
+ x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])
+
+ # seaborn correlogram
+ sn.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
+ plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)
+ plt.close()
+
+ # matplotlib labels
+ matplotlib.use('svg') # faster
+ ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
+ y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
+ with contextlib.suppress(Exception): # color histogram bars by class
+ [y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # known issue #3195
+ ax[0].set_ylabel('instances')
+ if 0 < len(names) < 30:
+ ax[0].set_xticks(range(len(names)))
+ ax[0].set_xticklabels(names, rotation=90, fontsize=10)
+ else:
+ ax[0].set_xlabel('classes')
+ sn.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)
+ sn.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)
+
+ # rectangles
+ labels[:, 1:3] = 0.5 # center
+ labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
+ img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
+ for cls, *box in labels[:1000]:
+ ImageDraw.Draw(img).rectangle(box, width=1, outline=colors(cls)) # plot
+ ax[1].imshow(img)
+ ax[1].axis('off')
+
+ for a in [0, 1, 2, 3]:
+ for s in ['top', 'right', 'left', 'bottom']:
+ ax[a].spines[s].set_visible(False)
+
+ plt.savefig(save_dir / 'labels.jpg', dpi=200)
+ matplotlib.use('Agg')
+ plt.close()
+
+
+def imshow_cls(im, labels=None, pred=None, names=None, nmax=25, verbose=False, f=Path('images.jpg')):
+ # Show classification image grid with labels (optional) and predictions (optional)
+ from utils.augmentations import denormalize
+
+ names = names or [f'class{i}' for i in range(1000)]
+ blocks = torch.chunk(denormalize(im.clone()).cpu().float(), len(im),
+ dim=0) # select batch index 0, block by channels
+ n = min(len(blocks), nmax) # number of plots
+ m = min(8, round(n ** 0.5)) # 8 x 8 default
+ fig, ax = plt.subplots(math.ceil(n / m), m) # 8 rows x n/8 cols
+ ax = ax.ravel() if m > 1 else [ax]
+ # plt.subplots_adjust(wspace=0.05, hspace=0.05)
+ for i in range(n):
+ ax[i].imshow(blocks[i].squeeze().permute((1, 2, 0)).numpy().clip(0.0, 1.0))
+ ax[i].axis('off')
+ if labels is not None:
+ s = names[labels[i]] + (f'—{names[pred[i]]}' if pred is not None else '')
+ ax[i].set_title(s, fontsize=8, verticalalignment='top')
+ plt.savefig(f, dpi=300, bbox_inches='tight')
+ plt.close()
+ if verbose:
+ LOGGER.info(f"Saving {f}")
+ if labels is not None:
+ LOGGER.info('True: ' + ' '.join(f'{names[i]:3s}' for i in labels[:nmax]))
+ if pred is not None:
+ LOGGER.info('Predicted:' + ' '.join(f'{names[i]:3s}' for i in pred[:nmax]))
+ return f
+
+
+def plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *; plot_evolve()
+ # Plot evolve.csv hyp evolution results
+ evolve_csv = Path(evolve_csv)
+ data = pd.read_csv(evolve_csv)
+ keys = [x.strip() for x in data.columns]
+ x = data.values
+ f = fitness(x)
+ j = np.argmax(f) # max fitness index
+ plt.figure(figsize=(10, 12), tight_layout=True)
+ matplotlib.rc('font', **{'size': 8})
+ print(f'Best results from row {j} of {evolve_csv}:')
+ for i, k in enumerate(keys[7:]):
+ v = x[:, 7 + i]
+ mu = v[j] # best single result
+ plt.subplot(6, 5, i + 1)
+ plt.scatter(v, f, c=hist2d(v, f, 20), cmap='viridis', alpha=.8, edgecolors='none')
+ plt.plot(mu, f.max(), 'k+', markersize=15)
+ plt.title(f'{k} = {mu:.3g}', fontdict={'size': 9}) # limit to 40 characters
+ if i % 5 != 0:
+ plt.yticks([])
+ print(f'{k:>15}: {mu:.3g}')
+ f = evolve_csv.with_suffix('.png') # filename
+ plt.savefig(f, dpi=200)
+ plt.close()
+ print(f'Saved {f}')
+
+
+def plot_results(file='path/to/results.csv', dir=''):
+ # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')
+ save_dir = Path(file).parent if file else Path(dir)
+ fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
+ ax = ax.ravel()
+ files = list(save_dir.glob('results*.csv'))
+ assert len(files), f'No results.csv files found in {save_dir.resolve()}, nothing to plot.'
+ for f in files:
+ try:
+ data = pd.read_csv(f)
+ s = [x.strip() for x in data.columns]
+ x = data.values[:, 0]
+ for i, j in enumerate([1, 2, 3, 4, 5, 8, 9, 10, 6, 7]):
+ y = data.values[:, j].astype('float')
+ # y[y == 0] = np.nan # don't show zero values
+ ax[i].plot(x, y, marker='.', label=f.stem, linewidth=2, markersize=8)
+ ax[i].set_title(s[j], fontsize=12)
+ # if j in [8, 9, 10]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ LOGGER.info(f'Warning: Plotting error for {f}: {e}')
+ ax[1].legend()
+ fig.savefig(save_dir / 'results.png', dpi=200)
+ plt.close()
+
+
+def profile_idetection(start=0, stop=0, labels=(), save_dir=''):
+ # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()
+ ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
+ s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']
+ files = list(Path(save_dir).glob('frames*.txt'))
+ for fi, f in enumerate(files):
+ try:
+ results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
+ n = results.shape[1] # number of rows
+ x = np.arange(start, min(stop, n) if stop else n)
+ results = results[:, x]
+ t = (results[0] - results[0].min()) # set t0=0s
+ results[0] = x
+ for i, a in enumerate(ax):
+ if i < len(results):
+ label = labels[fi] if len(labels) else f.stem.replace('frames_', '')
+ a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)
+ a.set_title(s[i])
+ a.set_xlabel('time (s)')
+ # if fi == len(files) - 1:
+ # a.set_ylim(bottom=0)
+ for side in ['top', 'right']:
+ a.spines[side].set_visible(False)
+ else:
+ a.remove()
+ except Exception as e:
+ print(f'Warning: Plotting error for {f}; {e}')
+ ax[1].legend()
+ plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)
+
+
+def save_one_box(xyxy, im, file=Path('im.jpg'), gain=1.02, pad=10, square=False, BGR=False, save=True):
+ # Save image crop as {file} with crop size multiple {gain} and {pad} pixels. Save and/or return crop
+ xyxy = torch.tensor(xyxy).view(-1, 4)
+ b = xyxy2xywh(xyxy) # boxes
+ if square:
+ b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # attempt rectangle to square
+ b[:, 2:] = b[:, 2:] * gain + pad # box wh * gain + pad
+ xyxy = xywh2xyxy(b).long()
+ clip_coords(xyxy, im.shape)
+ crop = im[int(xyxy[0, 1]):int(xyxy[0, 3]), int(xyxy[0, 0]):int(xyxy[0, 2]), ::(1 if BGR else -1)]
+ if save:
+ file.parent.mkdir(parents=True, exist_ok=True) # make directory
+ f = str(increment_path(file).with_suffix('.jpg'))
+ # cv2.imwrite(f, crop) # save BGR, https://github.com/ultralytics/yolov5/issues/7007 chroma subsampling issue
+ Image.fromarray(crop[..., ::-1]).save(f, quality=95, subsampling=0) # save RGB
+ return crop
diff --git a/yolov7_seg/seg/utils/segment/__init__.py b/yolov7_seg/seg/utils/segment/__init__.py
new file mode 100644
index 000000000..84952a816
--- /dev/null
+++ b/yolov7_seg/seg/utils/segment/__init__.py
@@ -0,0 +1 @@
+# init
\ No newline at end of file
diff --git a/yolov7_seg/seg/utils/segment/__pycache__/__init__.cpython-310.pyc b/yolov7_seg/seg/utils/segment/__pycache__/__init__.cpython-310.pyc
new file mode 100644
index 000000000..75db2c57f
Binary files /dev/null and b/yolov7_seg/seg/utils/segment/__pycache__/__init__.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/utils/segment/__pycache__/general.cpython-310.pyc b/yolov7_seg/seg/utils/segment/__pycache__/general.cpython-310.pyc
new file mode 100644
index 000000000..908e148b2
Binary files /dev/null and b/yolov7_seg/seg/utils/segment/__pycache__/general.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/utils/segment/__pycache__/plots.cpython-310.pyc b/yolov7_seg/seg/utils/segment/__pycache__/plots.cpython-310.pyc
new file mode 100644
index 000000000..c7d1a69a9
Binary files /dev/null and b/yolov7_seg/seg/utils/segment/__pycache__/plots.cpython-310.pyc differ
diff --git a/yolov7_seg/seg/utils/segment/augmentations.py b/yolov7_seg/seg/utils/segment/augmentations.py
new file mode 100644
index 000000000..6369464b4
--- /dev/null
+++ b/yolov7_seg/seg/utils/segment/augmentations.py
@@ -0,0 +1,104 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Image augmentation functions
+"""
+
+import math
+import random
+
+import cv2
+import numpy as np
+
+from ..augmentations import box_candidates
+from ..general import resample_segments, segment2box
+
+
+def mixup(im, labels, segments, im2, labels2, segments2):
+ # Applies MixUp augmentation https://arxiv.org/pdf/1710.09412.pdf
+ r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
+ im = (im * r + im2 * (1 - r)).astype(np.uint8)
+ labels = np.concatenate((labels, labels2), 0)
+ segments = np.concatenate((segments, segments2), 0)
+ return im, labels, segments
+
+
+def random_perspective(im,
+ targets=(),
+ segments=(),
+ degrees=10,
+ translate=.1,
+ scale=.1,
+ shear=10,
+ perspective=0.0,
+ border=(0, 0)):
+ # torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
+ # targets = [cls, xyxy]
+
+ height = im.shape[0] + border[0] * 2 # shape(h,w,c)
+ width = im.shape[1] + border[1] * 2
+
+ # Center
+ C = np.eye(3)
+ C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
+ C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
+
+ # Perspective
+ P = np.eye(3)
+ P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
+ P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
+
+ # Rotation and Scale
+ R = np.eye(3)
+ a = random.uniform(-degrees, degrees)
+ # a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
+ s = random.uniform(1 - scale, 1 + scale)
+ # s = 2 ** random.uniform(-scale, scale)
+ R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
+
+ # Shear
+ S = np.eye(3)
+ S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
+ S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
+
+ # Translation
+ T = np.eye(3)
+ T[0, 2] = (random.uniform(0.5 - translate, 0.5 + translate) * width) # x translation (pixels)
+ T[1, 2] = (random.uniform(0.5 - translate, 0.5 + translate) * height) # y translation (pixels)
+
+ # Combined rotation matrix
+ M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
+ if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
+ if perspective:
+ im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
+ else: # affine
+ im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
+
+ # Visualize
+ # import matplotlib.pyplot as plt
+ # ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
+ # ax[0].imshow(im[:, :, ::-1]) # base
+ # ax[1].imshow(im2[:, :, ::-1]) # warped
+
+ # Transform label coordinates
+ n = len(targets)
+ new_segments = []
+ if n:
+ new = np.zeros((n, 4))
+ segments = resample_segments(segments) # upsample
+ for i, segment in enumerate(segments):
+ xy = np.ones((len(segment), 3))
+ xy[:, :2] = segment
+ xy = xy @ M.T # transform
+ xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]) # perspective rescale or affine
+
+ # clip
+ new[i] = segment2box(xy, width, height)
+ new_segments.append(xy)
+
+ # filter candidates
+ i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01)
+ targets = targets[i]
+ targets[:, 1:5] = new[i]
+ new_segments = np.array(new_segments)[i]
+
+ return im, targets, new_segments
diff --git a/yolov7_seg/seg/utils/segment/dataloaders.py b/yolov7_seg/seg/utils/segment/dataloaders.py
new file mode 100644
index 000000000..4924fe0df
--- /dev/null
+++ b/yolov7_seg/seg/utils/segment/dataloaders.py
@@ -0,0 +1,331 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Dataloaders
+"""
+
+import os
+import random
+
+import cv2
+import numpy as np
+import torch
+from torch.utils.data import DataLoader, distributed
+
+from ..augmentations import augment_hsv, copy_paste, letterbox
+from ..dataloaders import InfiniteDataLoader, LoadImagesAndLabels, seed_worker
+from ..general import LOGGER, xyn2xy, xywhn2xyxy, xyxy2xywhn
+from ..torch_utils import torch_distributed_zero_first
+from .augmentations import mixup, random_perspective
+
+
+def create_dataloader(path,
+ imgsz,
+ batch_size,
+ stride,
+ single_cls=False,
+ hyp=None,
+ augment=False,
+ cache=False,
+ pad=0.0,
+ rect=False,
+ rank=-1,
+ workers=8,
+ image_weights=False,
+ quad=False,
+ prefix='',
+ shuffle=False,
+ mask_downsample_ratio=1,
+ overlap_mask=False):
+ if rect and shuffle:
+ LOGGER.warning('WARNING: --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ shuffle = False
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = LoadImagesAndLabelsAndMasks(
+ path,
+ imgsz,
+ batch_size,
+ augment=augment, # augmentation
+ hyp=hyp, # hyperparameters
+ rect=rect, # rectangular batches
+ cache_images=cache,
+ single_cls=single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix,
+ downsample_ratio=mask_downsample_ratio,
+ overlap=overlap_mask)
+
+ batch_size = min(batch_size, len(dataset))
+ nd = torch.cuda.device_count() # number of CUDA devices
+ nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
+ # generator = torch.Generator()
+ # generator.manual_seed(0)
+ return loader(
+ dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabelsAndMasks.collate_fn4 if quad else LoadImagesAndLabelsAndMasks.collate_fn,
+ worker_init_fn=seed_worker,
+ # generator=generator,
+ ), dataset
+
+
+class LoadImagesAndLabelsAndMasks(LoadImagesAndLabels): # for training/testing
+
+ def __init__(
+ self,
+ path,
+ img_size=640,
+ batch_size=16,
+ augment=False,
+ hyp=None,
+ rect=False,
+ image_weights=False,
+ cache_images=False,
+ single_cls=False,
+ stride=32,
+ pad=0,
+ prefix="",
+ downsample_ratio=1,
+ overlap=False,
+ ):
+ super().__init__(path, img_size, batch_size, augment, hyp, rect, image_weights, cache_images, single_cls,
+ stride, pad, prefix)
+ self.downsample_ratio = downsample_ratio
+ self.overlap = overlap
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ masks = []
+ if mosaic:
+ # Load mosaic
+ img, labels, segments = self.load_mosaic(index)
+ shapes = None
+
+ # MixUp augmentation
+ if random.random() < hyp["mixup"]:
+ img, labels, segments = mixup(img, labels, segments, *self.load_mosaic(random.randint(0, self.n - 1)))
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = self.load_image(index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ # [array, array, ....], array.shape=(num_points, 2), xyxyxyxy
+ segments = self.segments[index].copy()
+ if len(segments):
+ for i_s in range(len(segments)):
+ segments[i_s] = xyn2xy(
+ segments[i_s],
+ ratio[0] * w,
+ ratio[1] * h,
+ padw=pad[0],
+ padh=pad[1],
+ )
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ img, labels, segments = random_perspective(
+ img,
+ labels,
+ segments=segments,
+ degrees=hyp["degrees"],
+ translate=hyp["translate"],
+ scale=hyp["scale"],
+ shear=hyp["shear"],
+ perspective=hyp["perspective"],
+ return_seg=True,
+ )
+
+ nl = len(labels) # number of labels
+ if nl:
+ labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1e-3)
+ if self.overlap:
+ masks, sorted_idx = polygons2masks_overlap(img.shape[:2],
+ segments,
+ downsample_ratio=self.downsample_ratio)
+ masks = masks[None] # (640, 640) -> (1, 640, 640)
+ labels = labels[sorted_idx]
+ else:
+ masks = polygons2masks(img.shape[:2], segments, color=1, downsample_ratio=self.downsample_ratio)
+
+ masks = (torch.from_numpy(masks) if len(masks) else torch.zeros(1 if self.overlap else nl, img.shape[0] //
+ self.downsample_ratio, img.shape[1] //
+ self.downsample_ratio))
+ # TODO: albumentations support
+ if self.augment:
+ # Albumentations
+ # there are some augmentation that won't change boxes and masks,
+ # so just be it for now.
+ img, labels = self.albumentations(img, labels)
+ nl = len(labels) # update after albumentations
+
+ # HSV color-space
+ augment_hsv(img, hgain=hyp["hsv_h"], sgain=hyp["hsv_s"], vgain=hyp["hsv_v"])
+
+ # Flip up-down
+ if random.random() < hyp["flipud"]:
+ img = np.flipud(img)
+ if nl:
+ labels[:, 2] = 1 - labels[:, 2]
+ masks = torch.flip(masks, dims=[1])
+
+ # Flip left-right
+ if random.random() < hyp["fliplr"]:
+ img = np.fliplr(img)
+ if nl:
+ labels[:, 1] = 1 - labels[:, 1]
+ masks = torch.flip(masks, dims=[2])
+
+ # Cutouts # labels = cutout(img, labels, p=0.5)
+
+ labels_out = torch.zeros((nl, 6))
+ if nl:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return (torch.from_numpy(img), labels_out, self.im_files[index], shapes, masks)
+
+ def load_mosaic(self, index):
+ # YOLOv5 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
+
+ # 3 additional image indices
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = self.load_image(index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp["copy_paste"])
+ img4, labels4, segments4 = random_perspective(img4,
+ labels4,
+ segments4,
+ degrees=self.hyp["degrees"],
+ translate=self.hyp["translate"],
+ scale=self.hyp["scale"],
+ shear=self.hyp["shear"],
+ perspective=self.hyp["perspective"],
+ border=self.mosaic_border) # border to remove
+ return img4, labels4, segments4
+
+ @staticmethod
+ def collate_fn(batch):
+ img, label, path, shapes, masks = zip(*batch) # transposed
+ batched_masks = torch.cat(masks, 0)
+ for i, l in enumerate(label):
+ l[:, 0] = i # add target image index for build_targets()
+ return torch.stack(img, 0), torch.cat(label, 0), path, shapes, batched_masks
+
+
+def polygon2mask(img_size, polygons, color=1, downsample_ratio=1):
+ """
+ Args:
+ img_size (tuple): The image size.
+ polygons (np.ndarray): [N, M], N is the number of polygons,
+ M is the number of points(Be divided by 2).
+ """
+ mask = np.zeros(img_size, dtype=np.uint8)
+ polygons = np.asarray(polygons)
+ polygons = polygons.astype(np.int32)
+ shape = polygons.shape
+ polygons = polygons.reshape(shape[0], -1, 2)
+ cv2.fillPoly(mask, polygons, color=color)
+ nh, nw = (img_size[0] // downsample_ratio, img_size[1] // downsample_ratio)
+ # NOTE: fillPoly firstly then resize is trying the keep the same way
+ # of loss calculation when mask-ratio=1.
+ mask = cv2.resize(mask, (nw, nh))
+ return mask
+
+
+def polygons2masks(img_size, polygons, color, downsample_ratio=1):
+ """
+ Args:
+ img_size (tuple): The image size.
+ polygons (list[np.ndarray]): each polygon is [N, M],
+ N is the number of polygons,
+ M is the number of points(Be divided by 2).
+ """
+ masks = []
+ for si in range(len(polygons)):
+ mask = polygon2mask(img_size, [polygons[si].reshape(-1)], color, downsample_ratio)
+ masks.append(mask)
+ return np.array(masks)
+
+
+def polygons2masks_overlap(img_size, segments, downsample_ratio=1):
+ """Return a (640, 640) overlap mask."""
+ masks = np.zeros((img_size[0] // downsample_ratio, img_size[1] // downsample_ratio),
+ dtype=np.int32 if len(segments) > 255 else np.uint8)
+ areas = []
+ ms = []
+ for si in range(len(segments)):
+ mask = polygon2mask(
+ img_size,
+ [segments[si].reshape(-1)],
+ downsample_ratio=downsample_ratio,
+ color=1,
+ )
+ ms.append(mask)
+ areas.append(mask.sum())
+ areas = np.asarray(areas)
+ index = np.argsort(-areas)
+ ms = np.array(ms)[index]
+ for i in range(len(segments)):
+ mask = ms[i] * (i + 1)
+ masks = masks + mask
+ masks = np.clip(masks, a_min=0, a_max=i + 1)
+ return masks, index
diff --git a/yolov7_seg/seg/utils/segment/general.py b/yolov7_seg/seg/utils/segment/general.py
new file mode 100644
index 000000000..957275374
--- /dev/null
+++ b/yolov7_seg/seg/utils/segment/general.py
@@ -0,0 +1,128 @@
+import cv2
+import torch
+import torch.nn.functional as F
+
+
+def crop(masks, boxes):
+ """
+ "Crop" predicted masks by zeroing out everything not in the predicted bbox.
+ Vectorized by Chong (thanks Chong).
+
+ Args:
+ - masks should be a size [h, w, n] tensor of masks
+ - boxes should be a size [n, 4] tensor of bbox coords in relative point form
+ """
+
+ n, h, w = masks.shape
+ x1, y1, x2, y2 = torch.chunk(boxes[:, :, None], 4, 1) # x1 shape(1,1,n)
+ r = torch.arange(w, device=masks.device, dtype=x1.dtype)[None, None, :] # rows shape(1,w,1)
+ c = torch.arange(h, device=masks.device, dtype=x1.dtype)[None, :, None] # cols shape(h,1,1)
+
+ return masks * ((r >= x1) * (r < x2) * (c >= y1) * (c < y2))
+
+
+def process_mask_upsample(protos, masks_in, bboxes, shape):
+ """
+ Crop after upsample.
+ proto_out: [mask_dim, mask_h, mask_w]
+ out_masks: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape:input_image_size, (h, w)
+
+ return: h, w, n
+ """
+
+ c, mh, mw = protos.shape # CHW
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ masks = crop(masks, bboxes) # CHW
+ return masks.gt_(0.5)
+
+
+def process_mask(protos, masks_in, bboxes, shape, upsample=False):
+ """
+ Crop before upsample.
+ proto_out: [mask_dim, mask_h, mask_w]
+ out_masks: [n, mask_dim], n is number of masks after nms
+ bboxes: [n, 4], n is number of masks after nms
+ shape:input_image_size, (h, w)
+
+ return: h, w, n
+ """
+
+ c, mh, mw = protos.shape # CHW
+ ih, iw = shape
+ masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw) # CHW
+
+ downsampled_bboxes = bboxes.clone()
+ downsampled_bboxes[:, 0] *= mw / iw
+ downsampled_bboxes[:, 2] *= mw / iw
+ downsampled_bboxes[:, 3] *= mh / ih
+ downsampled_bboxes[:, 1] *= mh / ih
+
+ masks = crop(masks, downsampled_bboxes) # CHW
+ if upsample:
+ masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW
+ return masks.gt_(0.5)
+
+
+def scale_masks(img1_shape, masks, img0_shape, ratio_pad=None):
+ """
+ img1_shape: model input shape, [h, w]
+ img0_shape: origin pic shape, [h, w, 3]
+ masks: [h, w, num]
+ resize for the most time
+ """
+ # Rescale coords (xyxy) from img1_shape to img0_shape
+ if ratio_pad is None: # calculate from img0_shape
+ gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
+ pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
+ else:
+ gain = ratio_pad[0][0]
+ pad = ratio_pad[1]
+ tl_pad = int(pad[1]), int(pad[0]) # y, x
+ br_pad = int(img1_shape[0] - pad[1]), int(img1_shape[1] - pad[0])
+
+ if len(masks.shape) < 2:
+ raise ValueError(f'"len of masks shape" should be 2 or 3, but got {len(masks.shape)}')
+ # masks_h, masks_w, n
+ masks = masks[tl_pad[0]:br_pad[0], tl_pad[1]:br_pad[1]]
+ # 1, n, masks_h, masks_w
+ # masks = masks.permute(2, 0, 1).contiguous()[None, :]
+ # # shape = [1, n, masks_h, masks_w] after F.interpolate, so take first element
+ # masks = F.interpolate(masks, img0_shape[:2], mode='bilinear', align_corners=False)[0]
+ # masks = masks.permute(1, 2, 0).contiguous()
+ # masks_h, masks_w, n
+ masks = cv2.resize(masks, (img0_shape[1], img0_shape[0]))
+
+ # keepdim
+ if len(masks.shape) == 2:
+ masks = masks[:, :, None]
+
+ return masks
+
+
+def mask_iou(mask1, mask2, eps=1e-7):
+ """
+ mask1: [N, n] m1 means number of predicted objects
+ mask2: [M, n] m2 means number of gt objects
+ Note: n means image_w x image_h
+
+ return: masks iou, [N, M]
+ """
+ intersection = torch.matmul(mask1, mask2.t()).clamp(0)
+ union = (mask1.sum(1)[:, None] + mask2.sum(1)[None]) - intersection # (area1 + area2) - intersection
+ return intersection / (union + eps)
+
+
+def masks_iou(mask1, mask2, eps=1e-7):
+ """
+ mask1: [N, n] m1 means number of predicted objects
+ mask2: [N, n] m2 means number of gt objects
+ Note: n means image_w x image_h
+
+ return: masks iou, (N, )
+ """
+ intersection = (mask1 * mask2).sum(1).clamp(0) # (N, )
+ union = (mask1.sum(1) + mask2.sum(1))[None] - intersection # (area1 + area2) - intersection
+ return intersection / (union + eps)
diff --git a/yolov7_seg/seg/utils/segment/loss.py b/yolov7_seg/seg/utils/segment/loss.py
new file mode 100644
index 000000000..d7b35c9fd
--- /dev/null
+++ b/yolov7_seg/seg/utils/segment/loss.py
@@ -0,0 +1,186 @@
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+
+from ..general import xywh2xyxy
+from ..loss import FocalLoss, smooth_BCE
+from ..metrics import bbox_iou
+from ..torch_utils import de_parallel
+from .general import crop
+
+
+class ComputeLoss:
+ # Compute losses
+ def __init__(self, model, autobalance=False, overlap=False):
+ self.sort_obj_iou = False
+ self.overlap = overlap
+ device = next(model.parameters()).device # get model device
+ h = model.hyp # hyperparameters
+ self.device = device
+
+ # Define criteria
+ BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))
+ BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))
+
+ # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
+ self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets
+
+ # Focal loss
+ g = h['fl_gamma'] # focal loss gamma
+ if g > 0:
+ BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
+
+ m = de_parallel(model).model[-1] # Detect() module
+ self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
+ self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
+ self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
+ self.na = m.na # number of anchors
+ self.nc = m.nc # number of classes
+ self.nl = m.nl # number of layers
+ self.nm = m.nm # number of masks
+ self.anchors = m.anchors
+ self.device = device
+
+ def __call__(self, preds, targets, masks): # predictions, targets, model
+ p, proto = preds
+ bs, nm, mask_h, mask_w = proto.shape # batch size, number of masks, mask height, mask width
+ lcls = torch.zeros(1, device=self.device)
+ lbox = torch.zeros(1, device=self.device)
+ lobj = torch.zeros(1, device=self.device)
+ lseg = torch.zeros(1, device=self.device)
+ tcls, tbox, indices, anchors, tidxs, xywhn = self.build_targets(p, targets) # targets
+
+ # Losses
+ for i, pi in enumerate(p): # layer index, layer predictions
+ b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
+ tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
+
+ n = b.shape[0] # number of targets
+ if n:
+ pxy, pwh, _, pcls, pmask = pi[b, a, gj, gi].split((2, 2, 1, self.nc, nm), 1) # subset of predictions
+
+ # Box regression
+ pxy = pxy.sigmoid() * 2 - 0.5
+ pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
+ pbox = torch.cat((pxy, pwh), 1) # predicted box
+ iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
+ lbox += (1.0 - iou).mean() # iou loss
+
+ # Objectness
+ iou = iou.detach().clamp(0).type(tobj.dtype)
+ if self.sort_obj_iou:
+ j = iou.argsort()
+ b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
+ if self.gr < 1:
+ iou = (1.0 - self.gr) + self.gr * iou
+ tobj[b, a, gj, gi] = iou # iou ratio
+
+ # Classification
+ if self.nc > 1: # cls loss (only if multiple classes)
+ t = torch.full_like(pcls, self.cn, device=self.device) # targets
+ t[range(n), tcls[i]] = self.cp
+ lcls += self.BCEcls(pcls, t) # BCE
+
+ # Mask regression
+ if tuple(masks.shape[-2:]) != (mask_h, mask_w): # downsample
+ masks = F.interpolate(masks[None], (mask_h, mask_w), mode="bilinear", align_corners=False)[0]
+ marea = xywhn[i][:, 2:].prod(1) # mask width, height normalized
+ mxyxy = xywh2xyxy(xywhn[i] * torch.tensor([mask_w, mask_h, mask_w, mask_h], device=self.device))
+ for bi in b.unique():
+ j = b == bi # matching index
+ if self.overlap:
+ mask_gti = torch.where(masks[bi][None] == tidxs[i][j].view(-1, 1, 1), 1.0, 0.0)
+ else:
+ mask_gti = masks[tidxs[i]][j]
+ lseg += self.single_mask_loss(mask_gti, pmask[j], proto[bi], mxyxy[j], marea[j])
+
+ obji = self.BCEobj(pi[..., 4], tobj)
+ lobj += obji * self.balance[i] # obj loss
+ if self.autobalance:
+ self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
+
+ if self.autobalance:
+ self.balance = [x / self.balance[self.ssi] for x in self.balance]
+ lbox *= self.hyp["box"]
+ lobj *= self.hyp["obj"]
+ lcls *= self.hyp["cls"]
+ lseg *= self.hyp["box"] / bs
+
+ loss = lbox + lobj + lcls + lseg
+ return loss * bs, torch.cat((lbox, lseg, lobj, lcls)).detach()
+
+ def single_mask_loss(self, gt_mask, pred, proto, xyxy, area):
+ # Mask loss for one image
+ pred_mask = (pred @ proto.view(self.nm, -1)).view(-1, *proto.shape[1:]) # (n,32) @ (32,80,80) -> (n,80,80)
+ loss = F.binary_cross_entropy_with_logits(pred_mask, gt_mask, reduction="none")
+ return (crop(loss, xyxy).mean(dim=(1, 2)) / area).mean()
+
+ def build_targets(self, p, targets):
+ # Build targets for compute_loss(), input targets(image,class,x,y,w,h)
+ na, nt = self.na, targets.shape[0] # number of anchors, targets
+ tcls, tbox, indices, anch, tidxs, xywhn = [], [], [], [], [], []
+ gain = torch.ones(8, device=self.device) # normalized to gridspace gain
+ ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
+ if self.overlap:
+ batch = p[0].shape[0]
+ ti = []
+ for i in range(batch):
+ num = (targets[:, 0] == i).sum() # find number of targets of each image
+ ti.append(torch.arange(num, device=self.device).float().view(1, num).repeat(na, 1) + 1) # (na, num)
+ ti = torch.cat(ti, 1) # (na, nt)
+ else:
+ ti = torch.arange(nt, device=self.device).float().view(1, nt).repeat(na, 1)
+ targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None], ti[..., None]), 2) # append anchor indices
+
+ g = 0.5 # bias
+ off = torch.tensor(
+ [
+ [0, 0],
+ [1, 0],
+ [0, 1],
+ [-1, 0],
+ [0, -1], # j,k,l,m
+ # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
+ ],
+ device=self.device).float() * g # offsets
+
+ for i in range(self.nl):
+ anchors, shape = self.anchors[i], p[i].shape
+ gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
+
+ # Match targets to anchors
+ t = targets * gain # shape(3,n,7)
+ if nt:
+ # Matches
+ r = t[..., 4:6] / anchors[:, None] # wh ratio
+ j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
+ # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
+ t = t[j] # filter
+
+ # Offsets
+ gxy = t[:, 2:4] # grid xy
+ gxi = gain[[2, 3]] - gxy # inverse
+ j, k = ((gxy % 1 < g) & (gxy > 1)).T
+ l, m = ((gxi % 1 < g) & (gxi > 1)).T
+ j = torch.stack((torch.ones_like(j), j, k, l, m))
+ t = t.repeat((5, 1, 1))[j]
+ offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
+ else:
+ t = targets[0]
+ offsets = 0
+
+ # Define
+ bc, gxy, gwh, at = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
+ (a, tidx), (b, c) = at.long().T, bc.long().T # anchors, image, class
+ gij = (gxy - offsets).long()
+ gi, gj = gij.T # grid indices
+
+ # Append
+ indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
+ tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
+ anch.append(anchors[a]) # anchors
+ tcls.append(c) # class
+ tidxs.append(tidx)
+ xywhn.append(torch.cat((gxy, gwh), 1) / gain[2:6]) # xywh normalized
+
+ return tcls, tbox, indices, anch, tidxs, xywhn
diff --git a/yolov7_seg/seg/utils/segment/metrics.py b/yolov7_seg/seg/utils/segment/metrics.py
new file mode 100644
index 000000000..4143c76bf
--- /dev/null
+++ b/yolov7_seg/seg/utils/segment/metrics.py
@@ -0,0 +1,210 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Model validation metrics
+"""
+
+import numpy as np
+
+from ..metrics import ap_per_class
+
+
+def fitness(x):
+ # Model fitness as a weighted combination of metrics
+ w = [0.0, 0.0, 0.1, 0.9, 0.0, 0.0, 0.1, 0.9]
+ return (x[:, :8] * w).sum(1)
+
+
+def ap_per_class_box_and_mask(
+ tp_m,
+ tp_b,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=False,
+ save_dir=".",
+ names=(),
+):
+ """
+ Args:
+ tp_b: tp of boxes.
+ tp_m: tp of masks.
+ other arguments see `func: ap_per_class`.
+ """
+ results_boxes = ap_per_class(tp_b,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=plot,
+ save_dir=save_dir,
+ names=names,
+ prefix="Box")[2:]
+ results_masks = ap_per_class(tp_m,
+ conf,
+ pred_cls,
+ target_cls,
+ plot=plot,
+ save_dir=save_dir,
+ names=names,
+ prefix="Mask")[2:]
+
+ results = {
+ "boxes": {
+ "p": results_boxes[0],
+ "r": results_boxes[1],
+ "ap": results_boxes[3],
+ "f1": results_boxes[2],
+ "ap_class": results_boxes[4]},
+ "masks": {
+ "p": results_masks[0],
+ "r": results_masks[1],
+ "ap": results_masks[3],
+ "f1": results_masks[2],
+ "ap_class": results_masks[4]}}
+ return results
+
+
+class Metric:
+
+ def __init__(self) -> None:
+ self.p = [] # (nc, )
+ self.r = [] # (nc, )
+ self.f1 = [] # (nc, )
+ self.all_ap = [] # (nc, 10)
+ self.ap_class_index = [] # (nc, )
+
+ @property
+ def ap50(self):
+ """AP@0.5 of all classes.
+ Return:
+ (nc, ) or [].
+ """
+ return self.all_ap[:, 0] if len(self.all_ap) else []
+
+ @property
+ def ap(self):
+ """AP@0.5:0.95
+ Return:
+ (nc, ) or [].
+ """
+ return self.all_ap.mean(1) if len(self.all_ap) else []
+
+ @property
+ def mp(self):
+ """mean precision of all classes.
+ Return:
+ float.
+ """
+ return self.p.mean() if len(self.p) else 0.0
+
+ @property
+ def mr(self):
+ """mean recall of all classes.
+ Return:
+ float.
+ """
+ return self.r.mean() if len(self.r) else 0.0
+
+ @property
+ def map50(self):
+ """Mean AP@0.5 of all classes.
+ Return:
+ float.
+ """
+ return self.all_ap[:, 0].mean() if len(self.all_ap) else 0.0
+
+ @property
+ def map(self):
+ """Mean AP@0.5:0.95 of all classes.
+ Return:
+ float.
+ """
+ return self.all_ap.mean() if len(self.all_ap) else 0.0
+
+ def mean_results(self):
+ """Mean of results, return mp, mr, map50, map"""
+ return (self.mp, self.mr, self.map50, self.map)
+
+ def class_result(self, i):
+ """class-aware result, return p[i], r[i], ap50[i], ap[i]"""
+ return (self.p[i], self.r[i], self.ap50[i], self.ap[i])
+
+ def get_maps(self, nc):
+ maps = np.zeros(nc) + self.map
+ for i, c in enumerate(self.ap_class_index):
+ maps[c] = self.ap[i]
+ return maps
+
+ def update(self, results):
+ """
+ Args:
+ results: tuple(p, r, ap, f1, ap_class)
+ """
+ p, r, all_ap, f1, ap_class_index = results
+ self.p = p
+ self.r = r
+ self.all_ap = all_ap
+ self.f1 = f1
+ self.ap_class_index = ap_class_index
+
+
+class Metrics:
+ """Metric for boxes and masks."""
+
+ def __init__(self) -> None:
+ self.metric_box = Metric()
+ self.metric_mask = Metric()
+
+ def update(self, results):
+ """
+ Args:
+ results: Dict{'boxes': Dict{}, 'masks': Dict{}}
+ """
+ self.metric_box.update(list(results["boxes"].values()))
+ self.metric_mask.update(list(results["masks"].values()))
+
+ def mean_results(self):
+ return self.metric_box.mean_results() + self.metric_mask.mean_results()
+
+ def class_result(self, i):
+ return self.metric_box.class_result(i) + self.metric_mask.class_result(i)
+
+ def get_maps(self, nc):
+ return self.metric_box.get_maps(nc) + self.metric_mask.get_maps(nc)
+
+ @property
+ def ap_class_index(self):
+ # boxes and masks have the same ap_class_index
+ return self.metric_box.ap_class_index
+
+
+KEYS = [
+ "train/box_loss",
+ "train/seg_loss", # train loss
+ "train/obj_loss",
+ "train/cls_loss",
+ "metrics/precision(B)",
+ "metrics/recall(B)",
+ "metrics/mAP_0.5(B)",
+ "metrics/mAP_0.5:0.95(B)", # metrics
+ "metrics/precision(M)",
+ "metrics/recall(M)",
+ "metrics/mAP_0.5(M)",
+ "metrics/mAP_0.5:0.95(M)", # metrics
+ "val/box_loss",
+ "val/seg_loss", # val loss
+ "val/obj_loss",
+ "val/cls_loss",
+ "x/lr0",
+ "x/lr1",
+ "x/lr2",]
+
+BEST_KEYS = [
+ "best/epoch",
+ "best/precision(B)",
+ "best/recall(B)",
+ "best/mAP_0.5(B)",
+ "best/mAP_0.5:0.95(B)",
+ "best/precision(M)",
+ "best/recall(M)",
+ "best/mAP_0.5(M)",
+ "best/mAP_0.5:0.95(M)",]
diff --git a/yolov7_seg/seg/utils/segment/plots.py b/yolov7_seg/seg/utils/segment/plots.py
new file mode 100644
index 000000000..8d05bc2e1
--- /dev/null
+++ b/yolov7_seg/seg/utils/segment/plots.py
@@ -0,0 +1,182 @@
+import contextlib
+import math
+from pathlib import Path
+
+import cv2
+import matplotlib.pyplot as plt
+import numpy as np
+import pandas as pd
+import torch
+
+from .. import threaded
+from ..general import xywh2xyxy
+from ..plots import Annotator, colors
+
+
+def plot_masks(img, masks, colors, alpha=0.5):
+ """
+ Args:
+ img (tensor): img is in cuda, shape: [3, h, w], range: [0, 1]
+ masks (tensor): predicted masks on cuda, shape: [n, h, w]
+ colors (List[List[Int]]): colors for predicted masks, [[r, g, b] * n]
+ Return:
+ ndarray: img after draw masks, shape: [h, w, 3]
+
+ transform colors and send img_gpu to cpu for the most time.
+ """
+ img_gpu = img.clone()
+ num_masks = len(masks)
+ if num_masks == 0:
+ return img.permute(1, 2, 0).contiguous().cpu().numpy() * 255
+
+ # [n, 1, 1, 3]
+ # faster this way to transform colors
+ colors = torch.tensor(colors, device=img.device).float() / 255.0
+ colors = colors[:, None, None, :]
+ # [n, h, w, 1]
+ masks = masks[:, :, :, None]
+ masks_color = masks.repeat(1, 1, 1, 3) * colors * alpha
+ inv_alph_masks = masks * (-alpha) + 1
+ masks_color_summand = masks_color[0]
+ if num_masks > 1:
+ inv_alph_cumul = inv_alph_masks[:(num_masks - 1)].cumprod(dim=0)
+ masks_color_cumul = masks_color[1:] * inv_alph_cumul
+ masks_color_summand += masks_color_cumul.sum(dim=0)
+
+ # print(inv_alph_masks.prod(dim=0).shape) # [h, w, 1]
+ img_gpu = img_gpu.flip(dims=[0]) # filp channel for opencv
+ img_gpu = img_gpu.permute(1, 2, 0).contiguous()
+ # [h, w, 3]
+ img_gpu = img_gpu * inv_alph_masks.prod(dim=0) + masks_color_summand
+ return (img_gpu * 255).byte().cpu().numpy()
+
+
+@threaded
+def plot_images_and_masks(images, targets, masks, paths=None, fname='images.jpg', names=None):
+ # Plot image grid with labels
+ if isinstance(images, torch.Tensor):
+ images = images.cpu().float().numpy()
+ if isinstance(targets, torch.Tensor):
+ targets = targets.cpu().numpy()
+ if isinstance(masks, torch.Tensor):
+ masks = masks.cpu().numpy().astype(int)
+
+ max_size = 1920 # max image size
+ max_subplots = 16 # max image subplots, i.e. 4x4
+ bs, _, h, w = images.shape # batch size, _, height, width
+ bs = min(bs, max_subplots) # limit plot images
+ ns = np.ceil(bs ** 0.5) # number of subplots (square)
+ if np.max(images[0]) <= 1:
+ images *= 255 # de-normalise (optional)
+
+ # Build Image
+ mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
+ for i, im in enumerate(images):
+ if i == max_subplots: # if last batch has fewer images than we expect
+ break
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ im = im.transpose(1, 2, 0)
+ mosaic[y:y + h, x:x + w, :] = im
+
+ # Resize (optional)
+ scale = max_size / ns / max(h, w)
+ if scale < 1:
+ h = math.ceil(scale * h)
+ w = math.ceil(scale * w)
+ mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
+
+ # Annotate
+ fs = int((h + w) * ns * 0.01) # font size
+ annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
+ for i in range(i + 1):
+ x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
+ annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
+ if paths:
+ annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
+ if len(targets) > 0:
+ idx = targets[:, 0] == i
+ ti = targets[idx] # image targets
+
+ boxes = xywh2xyxy(ti[:, 2:6]).T
+ classes = ti[:, 1].astype('int')
+ labels = ti.shape[1] == 6 # labels if no conf column
+ conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
+
+ if boxes.shape[1]:
+ if boxes.max() <= 1.01: # if normalized with tolerance 0.01
+ boxes[[0, 2]] *= w # scale to pixels
+ boxes[[1, 3]] *= h
+ elif scale < 1: # absolute coords need scale if image scales
+ boxes *= scale
+ boxes[[0, 2]] += x
+ boxes[[1, 3]] += y
+ for j, box in enumerate(boxes.T.tolist()):
+ cls = classes[j]
+ color = colors(cls)
+ cls = names[cls] if names else cls
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'
+ annotator.box_label(box, label, color=color)
+
+ # Plot masks
+ if len(masks):
+ if masks.max() > 1.0: # mean that masks are overlap
+ image_masks = masks[[i]] # (1, 640, 640)
+ nl = len(ti)
+ index = np.arange(nl).reshape(nl, 1, 1) + 1
+ image_masks = np.repeat(image_masks, nl, axis=0)
+ image_masks = np.where(image_masks == index, 1.0, 0.0)
+ else:
+ image_masks = masks[idx]
+
+ im = np.asarray(annotator.im).copy()
+ for j, box in enumerate(boxes.T.tolist()):
+ if labels or conf[j] > 0.25: # 0.25 conf thresh
+ color = colors(classes[j])
+ mh, mw = image_masks[j].shape
+ if mh != h or mw != w:
+ mask = image_masks[j].astype(np.uint8)
+ mask = cv2.resize(mask, (w, h))
+ mask = mask.astype(np.bool)
+ else:
+ mask = image_masks[j].astype(np.bool)
+ with contextlib.suppress(Exception):
+ im[y:y + h, x:x + w, :][mask] = im[y:y + h, x:x + w, :][mask] * 0.4 + np.array(color) * 0.6
+ annotator.fromarray(im)
+ annotator.im.save(fname) # save
+
+
+def plot_results_with_masks(file="path/to/results.csv", dir="", best=True):
+ # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')
+ save_dir = Path(file).parent if file else Path(dir)
+ fig, ax = plt.subplots(2, 8, figsize=(18, 6), tight_layout=True)
+ ax = ax.ravel()
+ files = list(save_dir.glob("results*.csv"))
+ assert len(files), f"No results.csv files found in {save_dir.resolve()}, nothing to plot."
+ for f in files:
+ try:
+ data = pd.read_csv(f)
+ index = np.argmax(
+ 0.9 * data.values[:, 8] + 0.1 * data.values[:, 7] + 0.9 * data.values[:, 12] +
+ 0.1 * data.values[:, 11],)
+ s = [x.strip() for x in data.columns]
+ x = data.values[:, 0]
+ for i, j in enumerate([1, 2, 3, 4, 5, 6, 9, 10, 13, 14, 15, 16, 7, 8, 11, 12]):
+ y = data.values[:, j]
+ # y[y == 0] = np.nan # don't show zero values
+ ax[i].plot(x, y, marker=".", label=f.stem, linewidth=2, markersize=2)
+ if best:
+ # best
+ ax[i].scatter(index, y[index], color="r", label=f"best:{index}", marker="*", linewidth=3)
+ ax[i].set_title(s[j] + f"\n{round(y[index], 5)}")
+ else:
+ # last
+ ax[i].scatter(x[-1], y[-1], color="r", label="last", marker="*", linewidth=3)
+ ax[i].set_title(s[j] + f"\n{round(y[-1], 5)}")
+ # if j in [8, 9, 10]: # share train and val loss y axes
+ # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
+ except Exception as e:
+ print(f"Warning: Plotting error for {f}: {e}")
+ ax[1].legend()
+ fig.savefig(save_dir / "results.png", dpi=200)
+ plt.close()
diff --git a/yolov7_seg/seg/utils/torch_utils.py b/yolov7_seg/seg/utils/torch_utils.py
new file mode 100644
index 000000000..8639953a7
--- /dev/null
+++ b/yolov7_seg/seg/utils/torch_utils.py
@@ -0,0 +1,441 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+PyTorch utils
+"""
+
+import math
+import os
+import platform
+import subprocess
+import time
+import warnings
+from contextlib import contextmanager
+from copy import deepcopy
+from pathlib import Path
+
+import torch
+import torch.distributed as dist
+import torch.nn as nn
+import torch.nn.functional as F
+from torch.nn.parallel import DistributedDataParallel as DDP
+
+from utils.general import LOGGER, check_version, colorstr, file_date, git_describe
+
+LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
+RANK = int(os.getenv('RANK', -1))
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))
+
+try:
+ import thop # for FLOPs computation
+except ImportError:
+ thop = None
+
+# Suppress PyTorch warnings
+warnings.filterwarnings('ignore', message='User provided device_type of \'cuda\', but CUDA is not available. Disabling')
+
+
+def smart_inference_mode(torch_1_9=check_version(torch.__version__, '1.9.0')):
+ # Applies torch.inference_mode() decorator if torch>=1.9.0 else torch.no_grad() decorator
+ def decorate(fn):
+ return (torch.inference_mode if torch_1_9 else torch.no_grad)()(fn)
+
+ return decorate
+
+
+def smartCrossEntropyLoss(label_smoothing=0.0):
+ # Returns nn.CrossEntropyLoss with label smoothing enabled for torch>=1.10.0
+ if check_version(torch.__version__, '1.10.0'):
+ return nn.CrossEntropyLoss(label_smoothing=label_smoothing)
+ if label_smoothing > 0:
+ LOGGER.warning(f'WARNING: label smoothing {label_smoothing} requires torch>=1.10.0')
+ return nn.CrossEntropyLoss()
+
+
+def smart_DDP(model):
+ # Model DDP creation with checks
+ assert not check_version(torch.__version__, '1.12.0', pinned=True), \
+ 'torch==1.12.0 torchvision==0.13.0 DDP training is not supported due to a known issue. ' \
+ 'Please upgrade or downgrade torch to use DDP. See https://github.com/ultralytics/yolov5/issues/8395'
+ if check_version(torch.__version__, '1.11.0'):
+ return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK, static_graph=True)
+ else:
+ return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK)
+
+
+def reshape_classifier_output(model, n=1000):
+ # Update a TorchVision classification model to class count 'n' if required
+ from models.common import Classify
+ name, m = list((model.model if hasattr(model, 'model') else model).named_children())[-1] # last module
+ if isinstance(m, Classify): # YOLOv5 Classify() head
+ if m.linear.out_features != n:
+ m.linear = nn.Linear(m.linear.in_features, n)
+ elif isinstance(m, nn.Linear): # ResNet, EfficientNet
+ if m.out_features != n:
+ setattr(model, name, nn.Linear(m.in_features, n))
+ elif isinstance(m, nn.Sequential):
+ types = [type(x) for x in m]
+ if nn.Linear in types:
+ i = types.index(nn.Linear) # nn.Linear index
+ if m[i].out_features != n:
+ m[i] = nn.Linear(m[i].in_features, n)
+ elif nn.Conv2d in types:
+ i = types.index(nn.Conv2d) # nn.Conv2d index
+ if m[i].out_channels != n:
+ m[i] = nn.Conv2d(m[i].in_channels, n, m[i].kernel_size, m[i].stride, bias=m[i].bias)
+
+
+@contextmanager
+def torch_distributed_zero_first(local_rank: int):
+ # Decorator to make all processes in distributed training wait for each local_master to do something
+ if local_rank not in [-1, 0]:
+ dist.barrier(device_ids=[local_rank])
+ yield
+ if local_rank == 0:
+ dist.barrier(device_ids=[0])
+
+
+def device_count():
+ # Returns number of CUDA devices available. Safe version of torch.cuda.device_count(). Supports Linux and Windows
+ assert platform.system() in ('Linux', 'Windows'), 'device_count() only supported on Linux or Windows'
+ try:
+ cmd = 'nvidia-smi -L | wc -l' if platform.system() == 'Linux' else 'nvidia-smi -L | find /c /v ""' # Windows
+ return int(subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1])
+ except Exception:
+ return 0
+
+
+def select_device(device='', batch_size=0, newline=True):
+ # device = None or 'cpu' or 0 or '0' or '0,1,2,3'
+ s = f'YOLOv5 🚀 {git_describe() or file_date()} Python-{platform.python_version()} torch-{torch.__version__} '
+ device = str(device).strip().lower().replace('cuda:', '').replace('none', '') # to string, 'cuda:0' to '0'
+ cpu = device == 'cpu'
+ mps = device == 'mps' # Apple Metal Performance Shaders (MPS)
+ if cpu or mps:
+ os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False
+ elif device: # non-cpu device requested
+ os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable - must be before assert is_available()
+ assert torch.cuda.is_available() and torch.cuda.device_count() >= len(device.replace(',', '')), \
+ f"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)"
+
+ if not cpu and not mps and torch.cuda.is_available(): # prefer GPU if available
+ devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7
+ n = len(devices) # device count
+ if n > 1 and batch_size > 0: # check batch_size is divisible by device_count
+ assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'
+ space = ' ' * (len(s) + 1)
+ for i, d in enumerate(devices):
+ p = torch.cuda.get_device_properties(i)
+ s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / (1 << 20):.0f}MiB)\n" # bytes to MB
+ arg = 'cuda:0'
+ elif mps and getattr(torch, 'has_mps', False) and torch.backends.mps.is_available(): # prefer MPS if available
+ s += 'MPS\n'
+ arg = 'mps'
+ else: # revert to CPU
+ s += 'CPU\n'
+ arg = 'cpu'
+
+ if not newline:
+ s = s.rstrip()
+ LOGGER.info(s)
+ return torch.device(arg)
+
+
+def time_sync():
+ # PyTorch-accurate time
+ if torch.cuda.is_available():
+ torch.cuda.synchronize()
+ return time.time()
+
+
+def profile(input, ops, n=10, device=None):
+ """ YOLOv5 speed/memory/FLOPs profiler
+ Usage:
+ input = torch.randn(16, 3, 640, 640)
+ m1 = lambda x: x * torch.sigmoid(x)
+ m2 = nn.SiLU()
+ profile(input, [m1, m2], n=100) # profile over 100 iterations
+ """
+ results = []
+ if not isinstance(device, torch.device):
+ device = select_device(device)
+ print(f"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}"
+ f"{'input':>24s}{'output':>24s}")
+
+ for x in input if isinstance(input, list) else [input]:
+ x = x.to(device)
+ x.requires_grad = True
+ for m in ops if isinstance(ops, list) else [ops]:
+ m = m.to(device) if hasattr(m, 'to') else m # device
+ m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m
+ tf, tb, t = 0, 0, [0, 0, 0] # dt forward, backward
+ try:
+ flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPs
+ except Exception:
+ flops = 0
+
+ try:
+ for _ in range(n):
+ t[0] = time_sync()
+ y = m(x)
+ t[1] = time_sync()
+ try:
+ _ = (sum(yi.sum() for yi in y) if isinstance(y, list) else y).sum().backward()
+ t[2] = time_sync()
+ except Exception: # no backward method
+ # print(e) # for debug
+ t[2] = float('nan')
+ tf += (t[1] - t[0]) * 1000 / n # ms per op forward
+ tb += (t[2] - t[1]) * 1000 / n # ms per op backward
+ mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0 # (GB)
+ s_in, s_out = (tuple(x.shape) if isinstance(x, torch.Tensor) else 'list' for x in (x, y)) # shapes
+ p = sum(x.numel() for x in m.parameters()) if isinstance(m, nn.Module) else 0 # parameters
+ print(f'{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}')
+ results.append([p, flops, mem, tf, tb, s_in, s_out])
+ except Exception as e:
+ print(e)
+ results.append(None)
+ torch.cuda.empty_cache()
+ return results
+
+
+def is_parallel(model):
+ # Returns True if model is of type DP or DDP
+ return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
+
+
+def de_parallel(model):
+ # De-parallelize a model: returns single-GPU model if model is of type DP or DDP
+ return model.module if is_parallel(model) else model
+
+
+def initialize_weights(model):
+ for m in model.modules():
+ t = type(m)
+ if t is nn.Conv2d:
+ pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
+ elif t is nn.BatchNorm2d:
+ m.eps = 1e-3
+ m.momentum = 0.03
+ elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
+ m.inplace = True
+
+
+def find_modules(model, mclass=nn.Conv2d):
+ # Finds layer indices matching module class 'mclass'
+ return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
+
+
+def sparsity(model):
+ # Return global model sparsity
+ a, b = 0, 0
+ for p in model.parameters():
+ a += p.numel()
+ b += (p == 0).sum()
+ return b / a
+
+
+def prune(model, amount=0.3):
+ # Prune model to requested global sparsity
+ import torch.nn.utils.prune as prune
+ for name, m in model.named_modules():
+ if isinstance(m, nn.Conv2d):
+ prune.l1_unstructured(m, name='weight', amount=amount) # prune
+ prune.remove(m, 'weight') # make permanent
+ LOGGER.info(f'Model pruned to {sparsity(model):.3g} global sparsity')
+
+
+def fuse_conv_and_bn(conv, bn):
+ # Fuse Conv2d() and BatchNorm2d() layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
+ fusedconv = nn.Conv2d(conv.in_channels,
+ conv.out_channels,
+ kernel_size=conv.kernel_size,
+ stride=conv.stride,
+ padding=conv.padding,
+ groups=conv.groups,
+ bias=True).requires_grad_(False).to(conv.weight.device)
+
+ # Prepare filters
+ w_conv = conv.weight.clone().view(conv.out_channels, -1)
+ w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
+ fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
+
+ # Prepare spatial bias
+ b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
+ b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
+ fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
+
+ return fusedconv
+
+
+def model_info(model, verbose=False, imgsz=640):
+ # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
+ n_p = sum(x.numel() for x in model.parameters()) # number parameters
+ n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
+ if verbose:
+ print(f"{'layer':>5} {'name':>40} {'gradient':>9} {'parameters':>12} {'shape':>20} {'mu':>10} {'sigma':>10}")
+ for i, (name, p) in enumerate(model.named_parameters()):
+ name = name.replace('module_list.', '')
+ print('%5g %40s %9s %12g %20s %10.3g %10.3g' %
+ (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std()))
+
+ try: # FLOPs
+ p = next(model.parameters())
+ stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32 # max stride
+ im = torch.empty((1, p.shape[1], stride, stride), device=p.device) # input image in BCHW format
+ flops = thop.profile(deepcopy(model), inputs=(im,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs
+ imgsz = imgsz if isinstance(imgsz, list) else [imgsz, imgsz] # expand if int/float
+ fs = f', {flops * imgsz[0] / stride * imgsz[1] / stride:.1f} GFLOPs' # 640x640 GFLOPs
+ except Exception:
+ fs = ''
+
+ name = Path(model.yaml_file).stem.replace('yolov5', 'YOLOv5') if hasattr(model, 'yaml_file') else 'Model'
+ LOGGER.info(f"{name} summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
+
+
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # Scales img(bs,3,y,x) by ratio constrained to gs-multiple
+ if ratio == 1.0:
+ return img
+ h, w = img.shape[2:]
+ s = (int(h * ratio), int(w * ratio)) # new size
+ img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
+ if not same_shape: # pad/crop img
+ h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))
+ return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
+
+
+def copy_attr(a, b, include=(), exclude=()):
+ # Copy attributes from b to a, options to only include [...] and to exclude [...]
+ for k, v in b.__dict__.items():
+ if (len(include) and k not in include) or k.startswith('_') or k in exclude:
+ continue
+ else:
+ setattr(a, k, v)
+
+
+def smart_optimizer(model, name='Adam', lr=0.001, momentum=0.9, decay=1e-5):
+ # YOLOv5 3-param group optimizer: 0) weights with decay, 1) weights no decay, 2) biases no decay
+ g = [], [], [] # optimizer parameter groups
+ bn = tuple(v for k, v in nn.__dict__.items() if 'Norm' in k) # normalization layers, i.e. BatchNorm2d()
+ for v in model.modules():
+ if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter): # bias (no decay)
+ g[2].append(v.bias)
+ if isinstance(v, bn): # weight (no decay)
+ g[1].append(v.weight)
+ elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter): # weight (with decay)
+ g[0].append(v.weight)
+ if hasattr(v, 'im'):
+ if hasattr(v.im, 'implicit'):
+ g[1].append(v.im.implicit)
+ else:
+ for iv in v.im:
+ g[1].append(iv.implicit)
+ if hasattr(v, 'ia'):
+ if hasattr(v.ia, 'implicit'):
+ g[1].append(v.ia.implicit)
+ else:
+ for iv in v.ia:
+ g[1].append(iv.implicit)
+
+ if name == 'Adam':
+ optimizer = torch.optim.Adam(g[2], lr=lr, betas=(momentum, 0.999)) # adjust beta1 to momentum
+ elif name == 'AdamW':
+ optimizer = torch.optim.AdamW(g[2], lr=lr, betas=(momentum, 0.999), weight_decay=0.0)
+ elif name == 'RMSProp':
+ optimizer = torch.optim.RMSprop(g[2], lr=lr, momentum=momentum)
+ elif name == 'SGD':
+ optimizer = torch.optim.SGD(g[2], lr=lr, momentum=momentum, nesterov=True)
+ else:
+ raise NotImplementedError(f'Optimizer {name} not implemented.')
+
+ optimizer.add_param_group({'params': g[0], 'weight_decay': decay}) # add g0 with weight_decay
+ optimizer.add_param_group({'params': g[1], 'weight_decay': 0.0}) # add g1 (BatchNorm2d weights)
+ LOGGER.info(f"{colorstr('optimizer:')} {type(optimizer).__name__}(lr={lr}) with parameter groups "
+ f"{len(g[1])} weight(decay=0.0), {len(g[0])} weight(decay={decay}), {len(g[2])} bias")
+ return optimizer
+
+
+def smart_hub_load(repo='ultralytics/yolov5', model='yolov5s', **kwargs):
+ # YOLOv5 torch.hub.load() wrapper with smart error/issue handling
+ if check_version(torch.__version__, '1.9.1'):
+ kwargs['skip_validation'] = True # validation causes GitHub API rate limit errors
+ if check_version(torch.__version__, '1.12.0'):
+ kwargs['trust_repo'] = True # argument required starting in torch 0.12
+ try:
+ return torch.hub.load(repo, model, **kwargs)
+ except Exception:
+ return torch.hub.load(repo, model, force_reload=True, **kwargs)
+
+
+def smart_resume(ckpt, optimizer, ema=None, weights='yolov5s.pt', epochs=300, resume=True):
+ # Resume training from a partially trained checkpoint
+ best_fitness = 0.0
+ start_epoch = ckpt['epoch'] + 1
+ if ckpt['optimizer'] is not None:
+ optimizer.load_state_dict(ckpt['optimizer']) # optimizer
+ best_fitness = ckpt['best_fitness']
+ if ema and ckpt.get('ema'):
+ ema.ema.load_state_dict(ckpt['ema'].float().state_dict()) # EMA
+ ema.updates = ckpt['updates']
+ if resume:
+ assert start_epoch > 0, f'{weights} training to {epochs} epochs is finished, nothing to resume.\n' \
+ f"Start a new training without --resume, i.e. 'python train.py --weights {weights}'"
+ LOGGER.info(f'Resuming training from {weights} from epoch {start_epoch} to {epochs} total epochs')
+ if epochs < start_epoch:
+ LOGGER.info(f"{weights} has been trained for {ckpt['epoch']} epochs. Fine-tuning for {epochs} more epochs.")
+ epochs += ckpt['epoch'] # finetune additional epochs
+ return best_fitness, start_epoch, epochs
+
+
+class EarlyStopping:
+ # YOLOv5 simple early stopper
+ def __init__(self, patience=30):
+ self.best_fitness = 0.0 # i.e. mAP
+ self.best_epoch = 0
+ self.patience = patience or float('inf') # epochs to wait after fitness stops improving to stop
+ self.possible_stop = False # possible stop may occur next epoch
+
+ def __call__(self, epoch, fitness):
+ if fitness >= self.best_fitness: # >= 0 to allow for early zero-fitness stage of training
+ self.best_epoch = epoch
+ self.best_fitness = fitness
+ delta = epoch - self.best_epoch # epochs without improvement
+ self.possible_stop = delta >= (self.patience - 1) # possible stop may occur next epoch
+ stop = delta >= self.patience # stop training if patience exceeded
+ if stop:
+ LOGGER.info(f'Stopping training early as no improvement observed in last {self.patience} epochs. '
+ f'Best results observed at epoch {self.best_epoch}, best model saved as best.pt.\n'
+ f'To update EarlyStopping(patience={self.patience}) pass a new patience value, '
+ f'i.e. `python train.py --patience 300` or use `--patience 0` to disable EarlyStopping.')
+ return stop
+
+
+class ModelEMA:
+ """ Updated Exponential Moving Average (EMA) from https://github.com/rwightman/pytorch-image-models
+ Keeps a moving average of everything in the model state_dict (parameters and buffers)
+ For EMA details see https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
+ """
+
+ def __init__(self, model, decay=0.9999, tau=2000, updates=0):
+ # Create EMA
+ self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA
+ self.updates = updates # number of EMA updates
+ self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)
+ for p in self.ema.parameters():
+ p.requires_grad_(False)
+
+ def update(self, model):
+ # Update EMA parameters
+ self.updates += 1
+ d = self.decay(self.updates)
+
+ msd = de_parallel(model).state_dict() # model state_dict
+ for k, v in self.ema.state_dict().items():
+ if v.dtype.is_floating_point: # true for FP16 and FP32
+ v *= d
+ v += (1 - d) * msd[k].detach()
+ # assert v.dtype == msd[k].dtype == torch.float32, f'{k}: EMA {v.dtype} and model {msd[k].dtype} must be FP32'
+
+ def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):
+ # Update EMA attributes
+ copy_attr(self.ema, model, include, exclude)
diff --git a/yolov7_seg/seg/val.py b/yolov7_seg/seg/val.py
new file mode 100644
index 000000000..3230284e8
--- /dev/null
+++ b/yolov7_seg/seg/val.py
@@ -0,0 +1,405 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+"""
+Validate a trained YOLOv5 detection model on a detection dataset
+
+Usage:
+ $ python val.py --weights yolov5s.pt --data coco128.yaml --img 640
+
+Usage - formats:
+ $ python val.py --weights yolov5s.pt # PyTorch
+ yolov5s.torchscript # TorchScript
+ yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
+ yolov5s.xml # OpenVINO
+ yolov5s.engine # TensorRT
+ yolov5s.mlmodel # CoreML (macOS-only)
+ yolov5s_saved_model # TensorFlow SavedModel
+ yolov5s.pb # TensorFlow GraphDef
+ yolov5s.tflite # TensorFlow Lite
+ yolov5s_edgetpu.tflite # TensorFlow Edge TPU
+"""
+
+import argparse
+import json
+import os
+import sys
+from pathlib import Path
+
+import numpy as np
+import torch
+from tqdm import tqdm
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # YOLOv5 root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.callbacks import Callbacks
+from utils.dataloaders import create_dataloader
+from utils.general import (LOGGER, Profile, check_dataset, check_img_size, check_requirements, check_yaml,
+ coco80_to_coco91_class, colorstr, increment_path, non_max_suppression, print_args,
+ scale_coords, xywh2xyxy, xyxy2xywh)
+from utils.metrics import ConfusionMatrix, ap_per_class, box_iou
+from utils.plots import output_to_target, plot_images, plot_val_study
+from utils.torch_utils import select_device, smart_inference_mode
+
+
+def save_one_txt(predn, save_conf, shape, file):
+ # Save one txt result
+ gn = torch.tensor(shape)[[1, 0, 1, 0]] # normalization gain whwh
+ for *xyxy, conf, cls in predn.tolist():
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(file, 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+
+def save_one_json(predn, jdict, path, class_map):
+ # Save one JSON result {"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}
+ image_id = int(path.stem) if path.stem.isnumeric() else path.stem
+ box = xyxy2xywh(predn[:, :4]) # xywh
+ box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
+ for p, b in zip(predn.tolist(), box.tolist()):
+ jdict.append({
+ 'image_id': image_id,
+ 'category_id': class_map[int(p[5])],
+ 'bbox': [round(x, 3) for x in b],
+ 'score': round(p[4], 5)})
+
+
+def process_batch(detections, labels, iouv):
+ """
+ Return correct prediction matrix
+ Arguments:
+ detections (array[N, 6]), x1, y1, x2, y2, conf, class
+ labels (array[M, 5]), class, x1, y1, x2, y2
+ Returns:
+ correct (array[N, 10]), for 10 IoU levels
+ """
+ correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
+ iou = box_iou(labels[:, 1:], detections[:, :4])
+ correct_class = labels[:, 0:1] == detections[:, 5]
+ for i in range(len(iouv)):
+ x = torch.where((iou >= iouv[i]) & correct_class) # IoU > threshold and classes match
+ if x[0].shape[0]:
+ matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detect, iou]
+ if x[0].shape[0] > 1:
+ matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
+ # matches = matches[matches[:, 2].argsort()[::-1]]
+ matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
+ correct[matches[:, 1].astype(int), i] = True
+ return torch.tensor(correct, dtype=torch.bool, device=iouv.device)
+
+
+@smart_inference_mode()
+def run(
+ data,
+ weights=None, # model.pt path(s)
+ batch_size=32, # batch size
+ imgsz=640, # inference size (pixels)
+ conf_thres=0.001, # confidence threshold
+ iou_thres=0.6, # NMS IoU threshold
+ max_det=300, # maximum detections per image
+ task='val', # train, val, test, speed or study
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ workers=8, # max dataloader workers (per RANK in DDP mode)
+ single_cls=False, # treat as single-class dataset
+ augment=False, # augmented inference
+ verbose=False, # verbose output
+ save_txt=False, # save results to *.txt
+ save_hybrid=False, # save label+prediction hybrid results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_json=False, # save a COCO-JSON results file
+ project=ROOT / 'runs/val', # save to project/name
+ name='exp', # save to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ half=True, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ model=None,
+ dataloader=None,
+ save_dir=Path(''),
+ plots=True,
+ callbacks=Callbacks(),
+ compute_loss=None,
+):
+ # Initialize/load model and set device
+ training = model is not None
+ if training: # called by train.py
+ device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
+ half &= device.type != 'cpu' # half precision only supported on CUDA
+ model.half() if half else model.float()
+ else: # called directly
+ device = select_device(device, batch_size=batch_size)
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
+ stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+ half = model.fp16 # FP16 supported on limited backends with CUDA
+ if engine:
+ batch_size = model.batch_size
+ else:
+ device = model.device
+ if not (pt or jit):
+ batch_size = 1 # export.py models default to batch-size 1
+ LOGGER.info(f'Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models')
+
+ # Data
+ data = check_dataset(data) # check
+
+ # Configure
+ model.eval()
+ cuda = device.type != 'cpu'
+ is_coco = isinstance(data.get('val'), str) and data['val'].endswith(f'coco{os.sep}val2017.txt') # COCO dataset
+ nc = 1 if single_cls else int(data['nc']) # number of classes
+ iouv = torch.linspace(0.5, 0.95, 10, device=device) # iou vector for mAP@0.5:0.95
+ niou = iouv.numel()
+
+ # Dataloader
+ if not training:
+ if pt and not single_cls: # check --weights are trained on --data
+ ncm = model.model.nc
+ assert ncm == nc, f'{weights} ({ncm} classes) trained on different --data than what you passed ({nc} ' \
+ f'classes). Pass correct combination of --weights and --data that are trained together.'
+ model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
+ pad = 0.0 if task in ('speed', 'benchmark') else 0.5
+ rect = False if task == 'benchmark' else pt # square inference for benchmarks
+ task = task if task in ('train', 'val', 'test') else 'val' # path to train/val/test images
+ dataloader = create_dataloader(data[task],
+ imgsz,
+ batch_size,
+ stride,
+ single_cls,
+ pad=pad,
+ rect=rect,
+ workers=workers,
+ prefix=colorstr(f'{task}: '))[0]
+
+ seen = 0
+ confusion_matrix = ConfusionMatrix(nc=nc)
+ names = model.names if hasattr(model, 'names') else model.module.names # get class names
+ if isinstance(names, (list, tuple)): # old format
+ names = dict(enumerate(names))
+ class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
+ s = ('%22s' + '%11s' * 6) % ('Class', 'Images', 'Instances', 'P', 'R', 'mAP50', 'mAP50-95')
+ dt, p, r, f1, mp, mr, map50, map = (Profile(), Profile(), Profile()), 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
+ loss = torch.zeros(3, device=device)
+ jdict, stats, ap, ap_class = [], [], [], []
+ callbacks.run('on_val_start')
+ pbar = tqdm(dataloader, desc=s, bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress bar
+ for batch_i, (im, targets, paths, shapes) in enumerate(pbar):
+ callbacks.run('on_val_batch_start')
+ with dt[0]:
+ if cuda:
+ im = im.to(device, non_blocking=True)
+ targets = targets.to(device)
+ im = im.half() if half else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ nb, _, height, width = im.shape # batch size, channels, height, width
+
+ # Inference
+ with dt[1]:
+ out, train_out = model(im) if training else model(im, augment=augment, val=True) # inference, loss outputs
+
+ # Loss
+ if compute_loss:
+ loss += compute_loss([x.float() for x in train_out], targets)[1] # box, obj, cls
+
+ # NMS
+ targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
+ lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
+ with dt[2]:
+ out = non_max_suppression(out,
+ conf_thres,
+ iou_thres,
+ labels=lb,
+ multi_label=True,
+ agnostic=single_cls,
+ max_det=max_det)
+
+ # Metrics
+ for si, pred in enumerate(out):
+ labels = targets[targets[:, 0] == si, 1:]
+ nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
+ path, shape = Path(paths[si]), shapes[si][0]
+ correct = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
+ seen += 1
+
+ if npr == 0:
+ if nl:
+ stats.append((correct, *torch.zeros((2, 0), device=device), labels[:, 0]))
+ if plots:
+ confusion_matrix.process_batch(detections=None, labels=labels[:, 0])
+ continue
+
+ # Predictions
+ if single_cls:
+ pred[:, 5] = 0
+ predn = pred.clone()
+ scale_coords(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
+
+ # Evaluate
+ if nl:
+ tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
+ scale_coords(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
+ labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
+ correct = process_batch(predn, labelsn, iouv)
+ if plots:
+ confusion_matrix.process_batch(predn, labelsn)
+ stats.append((correct, pred[:, 4], pred[:, 5], labels[:, 0])) # (correct, conf, pcls, tcls)
+
+ # Save/log
+ if save_txt:
+ save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / f'{path.stem}.txt')
+ if save_json:
+ save_one_json(predn, jdict, path, class_map) # append to COCO-JSON dictionary
+ callbacks.run('on_val_image_end', pred, predn, path, names, im[si])
+
+ # Plot images
+ if plots and batch_i < 3:
+ plot_images(im, targets, paths, save_dir / f'val_batch{batch_i}_labels.jpg', names) # labels
+ plot_images(im, output_to_target(out), paths, save_dir / f'val_batch{batch_i}_pred.jpg', names) # pred
+
+ callbacks.run('on_val_batch_end')
+
+ # Compute metrics
+ stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
+ if len(stats) and stats[0].any():
+ tp, fp, p, r, f1, ap, ap_class = ap_per_class(*stats, plot=plots, save_dir=save_dir, names=names)
+ ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95
+ mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
+ nt = np.bincount(stats[3].astype(int), minlength=nc) # number of targets per class
+
+ # Print results
+ pf = '%22s' + '%11i' * 2 + '%11.3g' * 4 # print format
+ LOGGER.info(pf % ('all', seen, nt.sum(), mp, mr, map50, map))
+ if nt.sum() == 0:
+ LOGGER.warning(f'WARNING: no labels found in {task} set, can not compute metrics without labels ⚠️')
+
+ # Print results per class
+ if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
+ for i, c in enumerate(ap_class):
+ LOGGER.info(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
+
+ # Print speeds
+ t = tuple(x.t / seen * 1E3 for x in dt) # speeds per image
+ if not training:
+ shape = (batch_size, 3, imgsz, imgsz)
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}' % t)
+
+ # Plots
+ if plots:
+ confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
+ callbacks.run('on_val_end')
+
+ # Save JSON
+ if save_json and len(jdict):
+ w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
+ anno_json = str(Path(data.get('path', '../coco')) / 'annotations/instances_val2017.json') # annotations json
+ pred_json = str(save_dir / f"{w}_predictions.json") # predictions json
+ LOGGER.info(f'\nEvaluating pycocotools mAP... saving {pred_json}...')
+ with open(pred_json, 'w') as f:
+ json.dump(jdict, f)
+
+ try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
+ check_requirements(['pycocotools'])
+ from pycocotools.coco import COCO
+ from pycocotools.cocoeval import COCOeval
+
+ anno = COCO(anno_json) # init annotations api
+ pred = anno.loadRes(pred_json) # init predictions api
+ eval = COCOeval(anno, pred, 'bbox')
+ if is_coco:
+ eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.im_files] # image IDs to evaluate
+ eval.evaluate()
+ eval.accumulate()
+ eval.summarize()
+ map, map50 = eval.stats[:2] # update results (mAP@0.5:0.95, mAP@0.5)
+ except Exception as e:
+ LOGGER.info(f'pycocotools unable to run: {e}')
+
+ # Return results
+ model.float() # for training
+ if not training:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ maps = np.zeros(nc) + map
+ for i, c in enumerate(ap_class):
+ maps[c] = ap[i]
+ return (mp, mr, map50, map, *(loss.cpu() / len(dataloader)).tolist()), maps, t
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)')
+ parser.add_argument('--batch-size', type=int, default=32, help='batch size')
+ parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)')
+ parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=300, help='maximum detections per image')
+ parser.add_argument('--task', default='val', help='train, val, test, speed or study')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
+ parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--verbose', action='store_true', help='report mAP by class')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-json', action='store_true', help='save a COCO-JSON results file')
+ parser.add_argument('--project', default=ROOT / 'runs/val', help='save to project/name')
+ parser.add_argument('--name', default='exp', help='save to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.data = check_yaml(opt.data) # check YAML
+ opt.save_json |= opt.data.endswith('coco.yaml')
+ opt.save_txt |= opt.save_hybrid
+ print_args(vars(opt))
+ return opt
+
+
+def main(opt):
+ #check_requirements(requirements=ROOT / 'requirements.txt', exclude=('tensorboard', 'thop'))
+
+ if opt.task in ('train', 'val', 'test'): # run normally
+ if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
+ LOGGER.info(f'WARNING: confidence threshold {opt.conf_thres} > 0.001 produces invalid results ⚠️')
+ if opt.save_hybrid:
+ LOGGER.info('WARNING: --save-hybrid will return high mAP from hybrid labels, not from predictions alone ⚠️')
+ run(**vars(opt))
+
+ else:
+ weights = opt.weights if isinstance(opt.weights, list) else [opt.weights]
+ opt.half = True # FP16 for fastest results
+ if opt.task == 'speed': # speed benchmarks
+ # python val.py --task speed --data coco.yaml --batch 1 --weights yolov5n.pt yolov5s.pt...
+ opt.conf_thres, opt.iou_thres, opt.save_json = 0.25, 0.45, False
+ for opt.weights in weights:
+ run(**vars(opt), plots=False)
+
+ elif opt.task == 'study': # speed vs mAP benchmarks
+ # python val.py --task study --data coco.yaml --iou 0.7 --weights yolov5n.pt yolov5s.pt...
+ for opt.weights in weights:
+ f = f'study_{Path(opt.data).stem}_{Path(opt.weights).stem}.txt' # filename to save to
+ x, y = list(range(256, 1536 + 128, 128)), [] # x axis (image sizes), y axis
+ for opt.imgsz in x: # img-size
+ LOGGER.info(f'\nRunning {f} --imgsz {opt.imgsz}...')
+ r, _, t = run(**vars(opt), plots=False)
+ y.append(r + t) # results and times
+ np.savetxt(f, y, fmt='%10.4g') # save
+ os.system('zip -r study.zip study_*.txt')
+ plot_val_study(x=x) # plot
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/yolov7_seg/seg/yolov5s-seg.pt b/yolov7_seg/seg/yolov5s-seg.pt
new file mode 100644
index 000000000..a8350bd8a
Binary files /dev/null and b/yolov7_seg/seg/yolov5s-seg.pt differ
diff --git a/yolov7_seg/seg/yolov5s.pt b/yolov7_seg/seg/yolov5s.pt
new file mode 100644
index 000000000..841108fcf
Binary files /dev/null and b/yolov7_seg/seg/yolov5s.pt differ
 +
+
+
+