Hi,
I was following the race driver model to follow the derivation. I can't get my head around on how the D matrix was calculated.
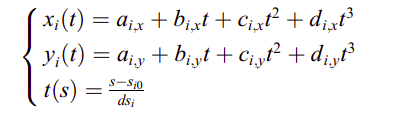
Above is the parameterized equation of x(t). Which is double differentiated with respect to t and then converted from sum to matrix form.
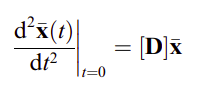
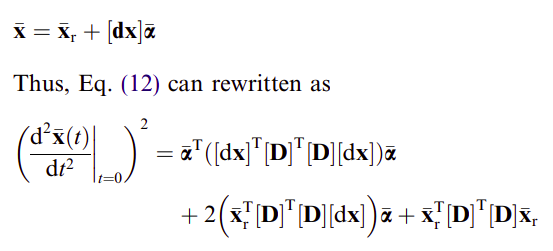
Finally a substitution is made to get the equation in alpha.
I tried deriving this on paper for simplistic 5 centerline point on track where D matrix would be 5x5 but could not succeed. I feel some of the steps are skipped in the paper. Do you have a detailed view of this?
Hi,



I was following the race driver model to follow the derivation. I can't get my head around on how the D matrix was calculated.
Above is the parameterized equation of x(t). Which is double differentiated with respect to t and then converted from sum to matrix form.
Finally a substitution is made to get the equation in alpha.
I tried deriving this on paper for simplistic 5 centerline point on track where D matrix would be 5x5 but could not succeed. I feel some of the steps are skipped in the paper. Do you have a detailed view of this?