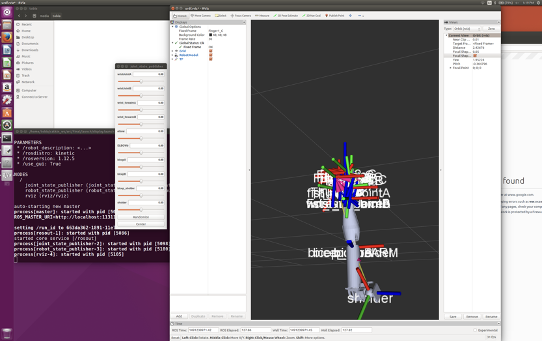
The purpose of this project is to integrate InMoov, an open-source 3D printed life-size robot, with the MoveIt! software package. The MoveIt! software will then allow users to build software applications to control the InMoov robot via motion planning, collision checking, perception etc. This is a multi-part project. Firstly, we must have a working 3D model of the InMoov robot. Secondly, the InMoov project is incompatible with MoveIt!. MoveIt! is an open-source collection of software libraries and tools often used in robotics that runs on top of Robot Operating System (ROS). Therefore, InMoov needs to also be compatible with ROS. For that to happen, we must add feedback to the InMoov design in order to relay the robot’s positional information to the computer running ROS or MoveIt!, and to allow control of the motors or servos from the computer. Thirdly, we will have to create the URDF model that ROS needs in order to work with our robot. We will also have to do the necessary work to create the communication link between ROS and the robot. Afterwards, we shall need to create all the necessary components needed by MoveIt!, such as the virtual kinematic model, etc
-
Notifications
You must be signed in to change notification settings - Fork 1
Tobiajet/InMoovIt
Folders and files
| Name | Name | Last commit message | Last commit date | |
|---|---|---|---|---|
Repository files navigation
About
No description, website, or topics provided.
Resources
Stars
Watchers
Forks
Releases
No releases published
Packages 0
No packages published