Install cmake 3.22 or later by following: https://apt.kitware.com/
See also Dockerfile
Use Eigen with commit ID = 1fd5ce1 that is compatible with both CUDA and system Eigen.
See also Dockerfile
- Check the compute capability your GPU is supporting : https://arnon.dk/matching-sm-architectures-arch-and-gencode-for-various-nvidia-cards/
- Check
CMAKE_CUDA_ARCHITECTURESprinted during cmake. - Override
CMAKE_CUDA_ARCHITECTURESif necessary (e.g.,cmake .. -DBUILD_WITH_CUDA=ON -DCMAKE_CUDA_ARCHITECTURES=87)
This error indicates that the shared library of the module is not visible to the current environment.
- Run
sudo ldconfig - Reload ROS-related paths :
source ros2_ws/install/setup.bash. -
echo $LD_LIBRARY_PATHand see if the library paths of related packages are contained (e.g.,/home/user/ros2_ws/install/glim/lib). If not, re-install ROS and all packages from scratch.
Install dialog manager (sudo apt install zenity or sudo apt install kdialog).
See this issue
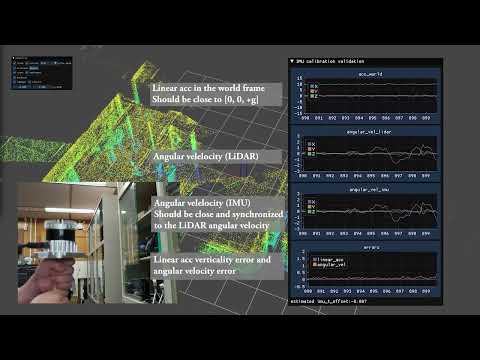
If you face troubles, which may be related to IMU (e.g., estimation gets degraded when the LiDAR rotates), try the imu_validator module to see if the LiDAR-IMU transformation is properly calibrated.
This module plots the linear acceleration vector in the world frame (which should be around [0, 0, +g] regardless of the LiDAR pose) and the angular velocity estimated by LiDAR and IMU (they should be similar and synchronized).
Note: To enable this extension module, you need to build glim_ext along with GLIM and add "libimu_validator.so" to "glim_ros/extension_modules" in config_ros.json. The validation GUI will appear on the standard viewer of GLIM.
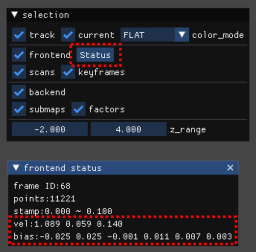
You can also check if IMU velocity and bias are properly estimated by clicking the Status button in the standard viewer. If the bias values are too large (> 0.5) or too frequently changed, the IMU may not be well synchronized and calibrated with the LiDAR.
Because the initial upward direction (gravity direction) of the map frame is estimated through a loose-coupling-based LiDAR-IMU fusion that may fail in dynamic motion. Try to keep the sensor at rest for the first a few seconds.
Note: You can manually provide an initial gravity-aligned sensor pose by specifying odometry_estimation/init_T_world_imu in config_odometry_*.json to skip the initial state estimation.
Remove libstandard_viewer.so in config_ros.json. Then, GLIM will launch without GUI.