generated from roboflow/template-python
-
Notifications
You must be signed in to change notification settings - Fork 1.9k
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Merge pull request #1047 from roboflow/docs/detect_small_objects
Detect Small Objects documentation
- Loading branch information
Showing
4 changed files
with
272 additions
and
0 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,5 +1,6 @@ | ||
| --- | ||
| comments: true | ||
| status: new | ||
| --- | ||
|
|
||
| # Detect and Annotate | ||
|
|
||
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,262 @@ | ||
| --- | ||
| comments: true | ||
| status: new | ||
| --- | ||
|
|
||
| # Detect Small Objects | ||
|
|
||
| This guide shows how to detect small objects | ||
| with the [Inference](https://github.com/roboflow/inference), | ||
| [Ultralytics](https://github.com/ultralytics/ultralytics) or | ||
| [Transformers](https://github.com/huggingface/transformers) packages using | ||
| [`InferenceSlicer`](detection/tools/inference_slicer/#supervision.detection.tools.inference_slicer.InferenceSlicer). | ||
|
|
||
| <video controls> | ||
| <source src="https://media.roboflow.com/supervision_detect_small_objects_example.mp4" type="video/mp4"> | ||
| </video> | ||
|
|
||
| ## Baseline Detection | ||
|
|
||
| Small object detection in high-resolution images presents challenges due to the objects' | ||
| size relative to the image resolution. | ||
|
|
||
| === "Inference" | ||
|
|
||
| ```python | ||
| import cv2 | ||
| import supervision as sv | ||
| from inference import get_model | ||
|
|
||
| model = get_model(model_id="yolov8x-640") | ||
| image = cv2.imread(<PATH TO IMAGE>) | ||
| results = model.infer(image)[0] | ||
| detections = sv.Detections.from_inference(results) | ||
|
|
||
| bounding_box_annotator = sv.BoundingBoxAnnotator() | ||
| label_annotator = sv.LabelAnnotator() | ||
|
|
||
| annotated_image = bounding_box_annotator.annotate( | ||
| scene=image, detections=detections) | ||
| annotated_image = label_annotator.annotate( | ||
| scene=annotated_image, detections=detections) | ||
| ``` | ||
|
|
||
| === "Ultralytics" | ||
|
|
||
| ```python | ||
| import cv2 | ||
| import supervision as sv | ||
| from ultralytics import YOLO | ||
|
|
||
| model = YOLO("yolov8x.pt") | ||
| image = cv2.imread(<PATH TO IMAGE>) | ||
| results = model(image)[0] | ||
| detections = sv.Detections.from_ultralytics(results) | ||
|
|
||
| bounding_box_annotator = sv.BoundingBoxAnnotator() | ||
| label_annotator = sv.LabelAnnotator() | ||
|
|
||
| annotated_image = bounding_box_annotator.annotate( | ||
| scene=image, detections=detections) | ||
| annotated_image = label_annotator.annotate( | ||
| scene=annotated_image, detections=detections) | ||
| ``` | ||
|
|
||
| === "Transformers" | ||
|
|
||
| ```python | ||
| import torch | ||
| import supervision as sv | ||
| from PIL import Image | ||
| from transformers import DetrImageProcessor, DetrForObjectDetection | ||
|
|
||
| processor = DetrImageProcessor.from_pretrained("facebook/detr-resnet-50") | ||
| model = DetrForObjectDetection.from_pretrained("facebook/detr-resnet-50") | ||
|
|
||
| image = Image.open(<PATH TO IMAGE>) | ||
| inputs = processor(images=image, return_tensors="pt") | ||
|
|
||
| with torch.no_grad(): | ||
| outputs = model(**inputs) | ||
|
|
||
| width, height = image.size | ||
| target_size = torch.tensor([[height, width]]) | ||
| results = processor.post_process_object_detection( | ||
| outputs=outputs, target_sizes=target_size)[0] | ||
| detections = sv.Detections.from_transformers(results) | ||
|
|
||
| bounding_box_annotator = sv.BoundingBoxAnnotator() | ||
| label_annotator = sv.LabelAnnotator() | ||
|
|
||
| labels = [ | ||
| model.config.id2label[class_id] | ||
| for class_id | ||
| in detections.class_id | ||
| ] | ||
|
|
||
| annotated_image = bounding_box_annotator.annotate( | ||
| scene=image, detections=detections) | ||
| annotated_image = label_annotator.annotate( | ||
| scene=annotated_image, detections=detections, labels=labels) | ||
| ``` | ||
|
|
||
|  | ||
|
|
||
| ## Input Resolution | ||
|
|
||
| Modifying the input resolution of images before detection can enhance small object | ||
| identification at the cost of processing speed and increased memory usage. This method | ||
| is less effective for ultra-high-resolution images (4K and above). | ||
|
|
||
| === "Inference" | ||
|
|
||
| ```{ .py hl_lines="5" } | ||
| import cv2 | ||
| import supervision as sv | ||
| from inference import get_model | ||
|
|
||
| model = get_model(model_id="yolov8x-1280") | ||
| image = cv2.imread(<PATH TO IMAGE>) | ||
| results = model.infer(image)[0] | ||
| detections = sv.Detections.from_inference(results) | ||
|
|
||
| bounding_box_annotator = sv.BoundingBoxAnnotator() | ||
| label_annotator = sv.LabelAnnotator() | ||
|
|
||
| annotated_image = bounding_box_annotator.annotate( | ||
| scene=image, detections=detections) | ||
| annotated_image = label_annotator.annotate( | ||
| scene=annotated_image, detections=detections) | ||
| ``` | ||
|
|
||
| === "Ultralytics" | ||
|
|
||
| ```{ .py hl_lines="7" } | ||
| import cv2 | ||
| import supervision as sv | ||
| from ultralytics import YOLO | ||
|
|
||
| model = YOLO("yolov8x.pt") | ||
| image = cv2.imread(<PATH TO IMAGE>) | ||
| results = model(image, imgsz=1280)[0] | ||
| detections = sv.Detections.from_ultralytics(results) | ||
|
|
||
| bounding_box_annotator = sv.BoundingBoxAnnotator() | ||
| label_annotator = sv.LabelAnnotator() | ||
|
|
||
| annotated_image = bounding_box_annotator.annotate( | ||
| scene=image, detections=detections) | ||
| annotated_image = label_annotator.annotate( | ||
| scene=annotated_image, detections=detections) | ||
| ``` | ||
|
|
||
|  | ||
|
|
||
| ## Inference Slicer | ||
|
|
||
| [`InferenceSlicer`](detection/tools/inference_slicer/#supervision.detection.tools.inference_slicer.InferenceSlicer) | ||
| processes high-resolution images by dividing them into smaller segments, detecting | ||
| objects within each, and aggregating the results. | ||
|
|
||
| === "Inference" | ||
|
|
||
| ```{ .py hl_lines="9-14" } | ||
| import cv2 | ||
| import numpy as np | ||
| import supervision as sv | ||
| from inference import get_model | ||
|
|
||
| model = get_model(model_id="yolov8x-640") | ||
| image = cv2.imread(<PATH TO IMAGE>) | ||
|
|
||
| def callback(image_slice: np.ndarray) -> sv.Detections: | ||
| results = model.infer(image_slice)[0] | ||
| detections = sv.Detections.from_inference(results) | ||
|
|
||
| slicer = sv.InferenceSlicer(callback = callback) | ||
| detections = slicer(image) | ||
|
|
||
| bounding_box_annotator = sv.BoundingBoxAnnotator() | ||
| label_annotator = sv.LabelAnnotator() | ||
|
|
||
| annotated_image = bounding_box_annotator.annotate( | ||
| scene=image, detections=detections) | ||
| annotated_image = label_annotator.annotate( | ||
| scene=annotated_image, detections=detections) | ||
| ``` | ||
|
|
||
| === "Ultralytics" | ||
|
|
||
| ```{ .py hl_lines="9-14" } | ||
| import cv2 | ||
| import numpy as np | ||
| import supervision as sv | ||
| from ultralytics import YOLO | ||
|
|
||
| model = YOLO("yolov8x.pt") | ||
| image = cv2.imread(<PATH TO IMAGE>) | ||
|
|
||
| def callback(image_slice: np.ndarray) -> sv.Detections: | ||
| result = model(image_slice)[0] | ||
| return sv.Detections.from_ultralytics(result) | ||
|
|
||
| slicer = sv.InferenceSlicer(callback = callback) | ||
| detections = slicer(image) | ||
|
|
||
| bounding_box_annotator = sv.BoundingBoxAnnotator() | ||
| label_annotator = sv.LabelAnnotator() | ||
|
|
||
| annotated_image = bounding_box_annotator.annotate( | ||
| scene=image, detections=detections) | ||
| annotated_image = label_annotator.annotate( | ||
| scene=annotated_image, detections=detections) | ||
| ``` | ||
|
|
||
| === "Transformers" | ||
|
|
||
| ```{ .py hl_lines="13-28" } | ||
| import cv2 | ||
| import torch | ||
| import numpy as np | ||
| import supervision as sv | ||
| from PIL import Image | ||
| from transformers import DetrImageProcessor, DetrForObjectDetection | ||
|
|
||
| processor = DetrImageProcessor.from_pretrained("facebook/detr-resnet-50") | ||
| model = DetrForObjectDetection.from_pretrained("facebook/detr-resnet-50") | ||
|
|
||
| image = cv2.imread(<PATH TO IMAGE>) | ||
|
|
||
| def callback(image_slice: np.ndarray) -> sv.Detections: | ||
| image_slice = cv2.cvtColor(image_slice, cv2.COLOR_BGR2RGB) | ||
| image_slice = Image.fromarray(image_slice) | ||
| inputs = processor(images=image_slice, return_tensors="pt") | ||
|
|
||
| with torch.no_grad(): | ||
| outputs = model(**inputs) | ||
|
|
||
| width, height = image.size | ||
| target_size = torch.tensor([[height, width]]) | ||
| results = processor.post_process_object_detection( | ||
| outputs=outputs, target_sizes=target_size)[0] | ||
| return sv.Detections.from_transformers(results) | ||
|
|
||
| slicer = sv.InferenceSlicer(callback = callback) | ||
| detections = slicer(image) | ||
|
|
||
| bounding_box_annotator = sv.BoundingBoxAnnotator() | ||
| label_annotator = sv.LabelAnnotator() | ||
|
|
||
| labels = [ | ||
| model.config.id2label[class_id] | ||
| for class_id | ||
| in detections.class_id | ||
| ] | ||
|
|
||
| annotated_image = bounding_box_annotator.annotate( | ||
| scene=image, detections=detections) | ||
| annotated_image = label_annotator.annotate( | ||
| scene=annotated_image, detections=detections, labels=labels) | ||
| ``` | ||
|
|
||
| 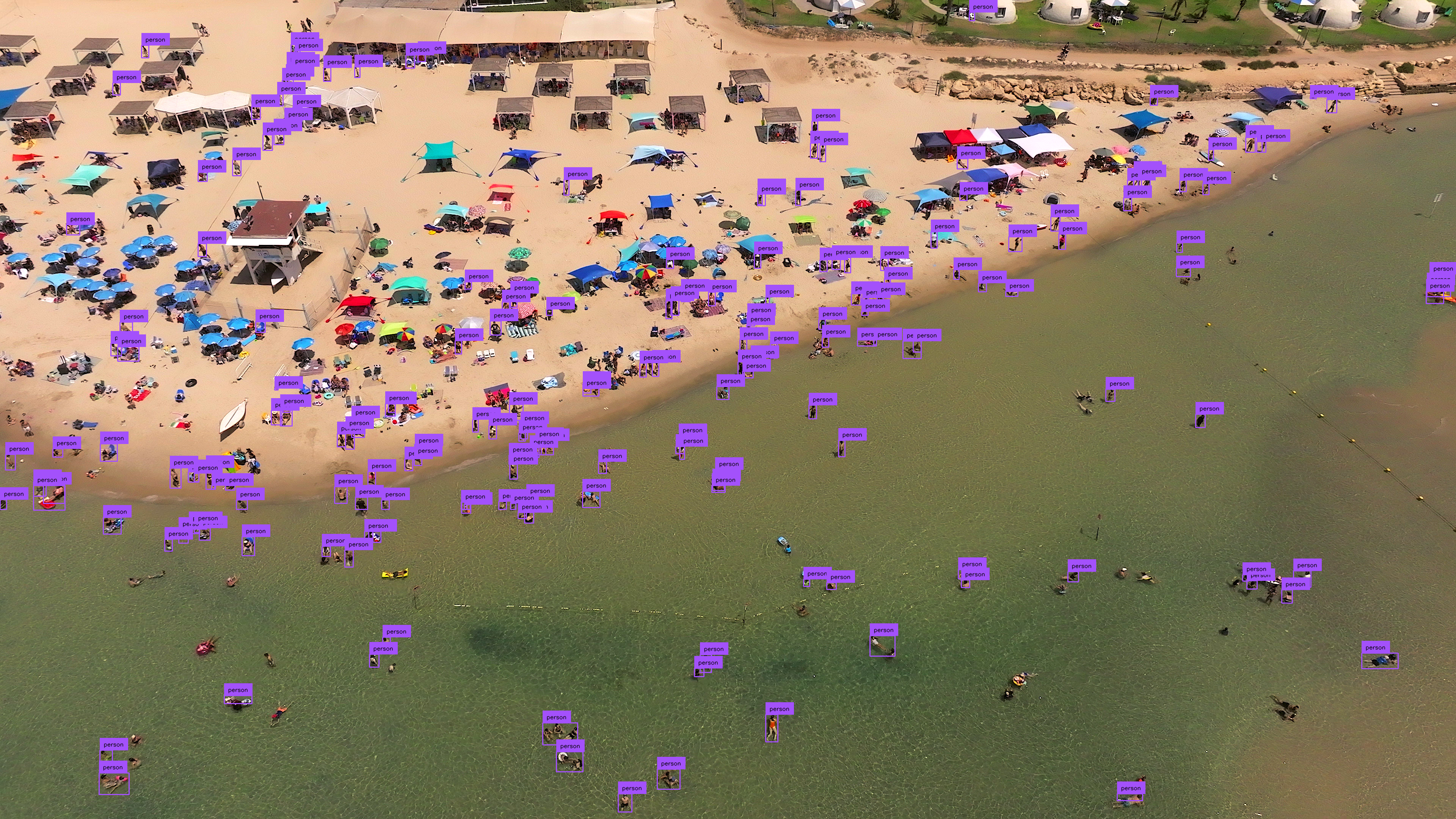 |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters