READMEのフォーマット修正 #86
There are no files selected for viewing
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
|
|
@@ -4,218 +4,135 @@ | |
|
|
||
| [](https://github.com/rt-net/raspimouse_sim/actions/workflows/industrial_ci.yml) | ||
|
|
||
| ROS 2 package suite for simulating the Raspberry Pi Mouse in Gazebo | ||
|
|
||
| 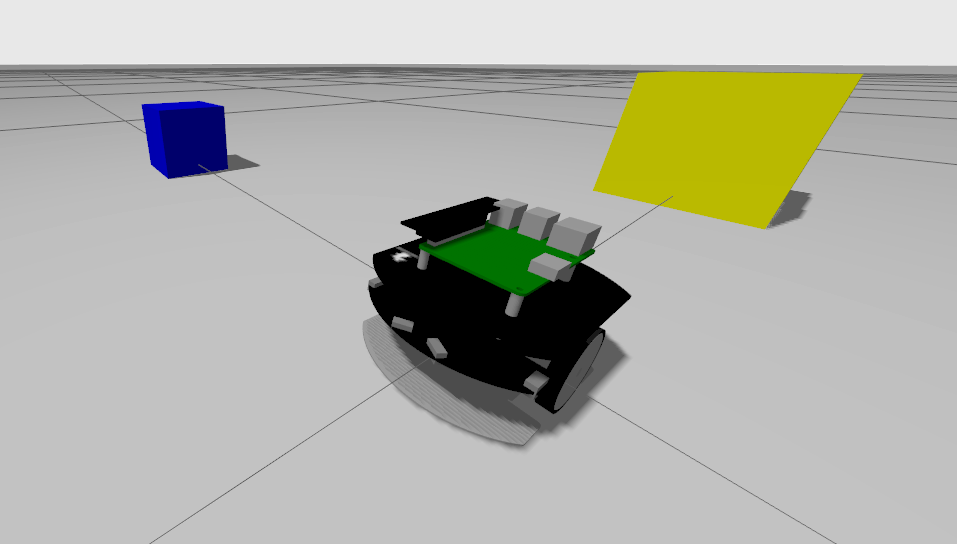 | ||
|
|
||
| ## Table of Contents | ||
|
|
||
| - [raspimouse\_sim](#raspimouse_sim) | ||
| - [Table of Contents](#table-of-contents) | ||
| - [Supported ROS distributions](#supported-ros-distributions) | ||
| - [Requirements](#requirements) | ||
| - [Installation](#installation) | ||
| - [Binary Installation](#binary-installation) | ||
| - [Source Build](#source-build) | ||
| - [QuickStart](#quickstart) | ||
| - [Packages](#packages) | ||
| - raspimouse_sim | ||
| - raspimouse_fake | ||
| - raspimouse_gazebo | ||
| - [How to Use Examples](#how-to-use-examples) | ||
| - Joystick Control | ||
| - Object Tracking | ||
| - Camera Line Follower | ||
| - SLAM & Navigation | ||
| - [License](#license) | ||
| - [Contributing](#contributing) | ||
| - [Acknowledgements](#acknowledgements) | ||
|
|
||
| ## Supported ROS distributions | ||
|
|
||
| ### ROS 2 | ||
|
|
||
| - [Humble Hawksbill](https://github.com/rt-net/raspimouse_sim/tree/humble) | ||
| - [Jazzy Jalisco](https://github.com/rt-net/raspimouse_sim/tree/jazzy) | ||
|
|
||
| ## Requirements | ||
|
|
||
| - OS | ||
| - Ubuntu Desktop 24.04 | ||
| - ROS 2 | ||
| - ROS 2 Jazzy Jalisco | ||
| - Gazebo | ||
| - Gazebo Sim 8.x | ||
|
|
||
| ## Installation | ||
|
|
||
| ### Binary Installation | ||
|
|
||
| ```bash | ||
| sudo apt install ros-jazzy-raspimouse-sim | ||
| ``` | ||
|
|
||
| ### Source Build | ||
|
|
||
| ```bash | ||
| # Create workspace directory | ||
| mkdir -p ~/ros2_ws/src && cd ~/ros2_ws/src | ||
|
|
||
| # Clone package | ||
| git clone -b $ROS_DISTRO https://github.com/rt-net/raspimouse_sim.git | ||
|
|
||
| # Install dependencies | ||
| rosdep install -r -y -i --from-paths . | ||
|
|
||
| # Build & Install | ||
| cd ~/ros2_ws | ||
| colcon build --symlink-install | ||
| source ~/ros2_ws/install/setup.bash | ||
| ``` | ||
|
|
||
| ## QuickStart | ||
|
|
||
| The following command launches the Gazebo simulator and displays the Raspberry Pi Mouse model. | ||
|
|
||
| ```sh | ||
| ros2 launch raspimouse_gazebo raspimouse_with_emptyworld.launch.py | ||
| ``` | ||
|
|
||
| ## Packages | ||
|
|
||
| - raspimouse_sim | ||
| - Manages meta-information for the packages in this repository. | ||
| - raspimouse_fake | ||
| - This package simulates the motor control interface of the Raspberry Pi Mouse. | ||
| - raspimouse_gazebo | ||
| - This package provides models and scripts to set up a simulation environment on [Gazebo](https://gazebosim.org). | ||
|
|
||
| ## How to Use Examples | ||
|
|
||
| Detailed usage of the sample program is explained in the [README](./raspimouse_gazebo/README.en.md) of the `raspimouse_gazebo` package. | ||
|
|
||
| - raspimouse_gazebo | ||
| - [Joystick Control](./raspimouse_gazebo/README.md#joystick-control) | ||
| - [Object Tracking](./raspimouse_gazebo/README.md#object-tracking) | ||
| - [Camera Line Follower](./raspimouse_gazebo/README.md#camera_line_follower) | ||
| - [SLAM & Navigation](./raspimouse_gazebo/README.md#slam--navigation) | ||
|
||
|
|
||
| ## License | ||
|
|
||
| (C) 2016 RT Corporation \<support@rt-net.jp\> | ||
|
|
||
| Each file is licensed as stated in their headers. | ||
| If no license is specified, the file is licensed under the MIT License. | ||
| The full license text is available in the [LICENSE](./LICENSE) file or at [https://opensource.org/license/MIT](https://opensource.org/license/MIT). | ||
|
|
||
| ## Contributing | ||
|
|
||
| - This software is open source, but its development is not open. | ||
| - This software is essentially provided as open source software on an “AS IS” (in its current state) basis. | ||
| - No free support is available for this software. | ||
| - Requests for bug fixes and corrections of typographical errors are always accepted; however, requests for additional features will be subject to our internal guidelines. For further details, please refer to the [Contribution Guidelines](https://github.com/rt-net/.github/blob/master/CONTRIBUTING.md). | ||
|
|
||
| ### Acknowledgements | ||
|
|
||
| This repository is developed based on files from the following repository. | ||
|
|
||
| - [CIR-KIT/fourth_robot_pkg]( https://github.com/CIR-KIT/fourth_robot_pkg ) | ||
| - author | ||
| - RyodoTanaka | ||
| - maintainer | ||
| - RyodoTanaka | ||
| - BSD ([BSD 3-Clause License](https://opensource.org/licenses/BSD-3-Clause)) | ||
| - For details, see [package.xml](https://github.com/CIR-KIT/fourth_robot_pkg/blob/indigo-devel/fourth_robot_control/package.xml). | ||
| - [yujinrobot/kobuki]( https://github.com/yujinrobot/kobuki ) | ||
| - authors | ||
| - Daniel Stonier | ||
| - Younghun Ju | ||
| - Jorge Santos Simon | ||
| - Marcus Liebhardt | ||
| - maintainer | ||
| - Daniel Stonier | ||
| - BSD ([BSD 3-Clause License](https://opensource.org/licenses/BSD-3-Clause)) | ||
| - For details, see [package.xml](https://github.com/yujinrobot/kobuki/blob/melodic/kobuki/package.xml). | ||
Oops, something went wrong.
Add this suggestion to a batch that can be applied as a single commit.
This suggestion is invalid because no changes were made to the code.
Suggestions cannot be applied while the pull request is closed.
Suggestions cannot be applied while viewing a subset of changes.
Only one suggestion per line can be applied in a batch.
Add this suggestion to a batch that can be applied as a single commit.
Applying suggestions on deleted lines is not supported.
You must change the existing code in this line in order to create a valid suggestion.
Outdated suggestions cannot be applied.
This suggestion has been applied or marked resolved.
Suggestions cannot be applied from pending reviews.
Suggestions cannot be applied on multi-line comments.
Suggestions cannot be applied while the pull request is queued to merge.
Suggestion cannot be applied right now. Please check back later.
Uh oh!
There was an error while loading. Please reload this page.