Incorrect Lidar Ray Behaviour with Lite Model Simulated in Maze World #37
Description
Please provide the following information:
- OS: Ubuntu 22.04
- ROS Distro: Humble
- Built from source or installed: Build from source
- Package version: 95139c9
- Robot Model: Lite
Expected behaviour
In simulation, the lidar rays should not go through obstacles and if there is no obstacle the lidar ray should not stop until the max distance.
Actual behaviour
When the lite model is spawned in the Maze world, a section of the lidar rays do not respond to the obstacles in the world. Instead they go through some obstacles and shows an odd shape even when there is no obstacle. This section turns with the robot and interferes with any attempt at SLAM. This occured before and after my modifications to the maze world. The following images are as I turned the robot on the spot:
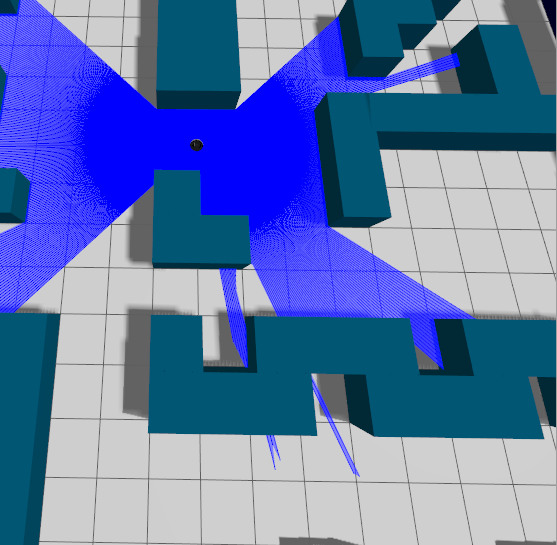
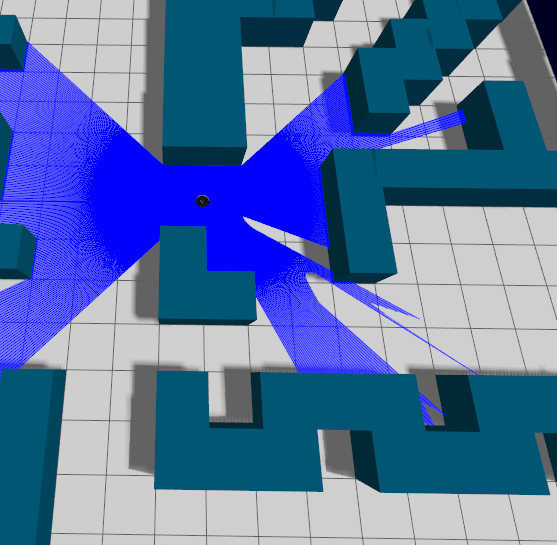
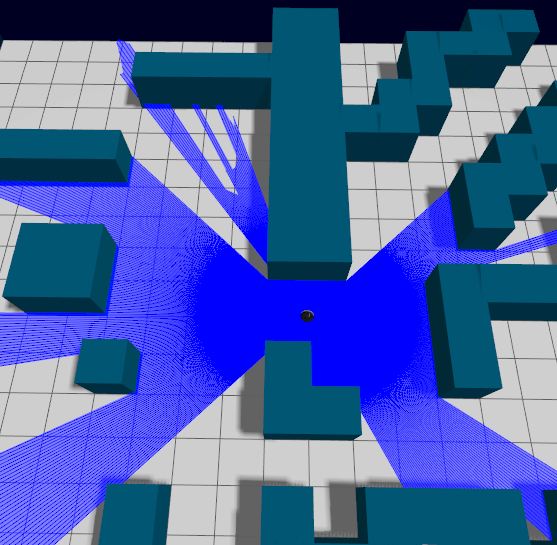
It also occurs with the standard model if you modify the urdf to remove components.
To Reproduce
Provide the steps to reproduce:
- Launch the Turtlebot4 Lite sim in the Maze world.
ros2 launch turtlebot4_ignition_bringup turtlebot4_ignition.launch.py world:=maze model:=lite- Play the simulation
- Use the "Visualize Lidar" plugin to display the lidar rays to see the issue clearly (issue is present even without the lidar rays visible)
Troubleshooting Steps So Far
- The lidar seems level and is going through the obstacles at the expected plane.
- This does not seem to occur in the warehouse world or with the full Turtlebot4 Standard
Other notes
I don't currently have time to look into this, sharing this information here for now.